Динамическая система формирования транспортных потоков является системой взаимодействия между водителями и относится к области автомобильного транспорта, а именно к формированию и информационному воздействию на транспортные потоки. Технический результат - значительное снижение условий возникновения транспортных заторов и коллапсов на улично-дорожной сети (УДС). Принцип работы системы основан на расчете баланса интересов водителей, как участников транспортного процесса и пропускной способности УДС при условии соблюдения ими правил дорожного движения (ПДД) и предписаний системы.
Изобретение относится к области регулирования дорожного движения, а именно к формированию транспортных потоков. Динамическая система формирования транспортных потоков относится к системам массового обслуживания (СМО) со слабой обратной связью и состоит из бортового устройства, периферийного оборудования и центрального оборудования с программно-аппаратным комплексом, рассчитывающим условия реализации поездки. При регистрации в системе пользователь указывает личные данные и данные своего транспортного средства, после чего составляется заявка на поездку, в которой указываются планируемые критерии и устанавливаются приоритеты между критериями. На основе заявки системой генерируется набор уникальных инструкций, и пользователь может выбрать только одну из них. Если инструкция выбрана, то заявка зарегистрирована, как единица транспортной нагрузки. Если инструкции отклонены, то пользователь изменяет исходные значения заявки для получения новых инструкций. Взаимодействие с пользователем продолжается до тех пор, пока заявка регистрируется, либо пользователь отказывается от взаимодействия с системой. Правилами генерации инструкций системы обеспечивается баланс между транспортными потребностями водителей и пропускной способностью улично-дорожной сети, в рамках соблюдения правил дорожного движения.
Известен ряд систем и способов индивидуального информационного воздействия на водителей, целью которых является регулирование доступа на УДС каждого конкретного водителя в рамках решения задачи недопущения возникновения транспортных заторов и коллапсов (RU №2507583 С2, RU 2572279 C1, RU 2459262 С2, RU 2178585 С1).
Недостатки данных систем заключаются в том, что у пользователей таких систем отсутствует возможность планировать свои поездки на необходимое время, а выбор варианта поездки рассчитывается на основе только одного критерия - пункта назначения. При этом предусматриваются ряд ограничений действий водителя в случае отклонения от заданного системой маршрута.
Наиболее близкое техническое решение к заявленному изобретению было предложено и защищено 22.05.2014 г. в работе «Повышение эффективности использования улично-дорожных сетей на основе управления формированием транспортных потоков». (Патент РФ №RU 2507583 С2. «Способ организации системы навигации и управления дорожным движением» Опубликовано: 20.02.2014 г.). Данное решение отличается от других подобных систем тем, что водитель в своей заявке на поездку сообщает пункт назначения, а расчет маршрутов в центре управления происходит по принципу отыскания кратчайшего маршрута для каждого ТС, чем достигается пользовательское равновесие Уордропа. Однако в рамках такой системы проблема возникновения транспортных коллапсов может заключаться в том, что у водителя, как в процессе подачи заявки на поездку, так и в процессе осуществления поездки, помимо кратчайшего маршрута, может быть и множество других критериев поездки и приоритетов между ними, для расчета пользовательского равновесия. Причем как сами критерии, так и приоритеты между ними могут быть динамичны, т.е. непостоянны во времени. Поэтому в рамках такой системы данное обстоятельство всегда будет являться источником случайных возмущений, приводящий к возможности возникновения транспортных коллапсов.
Недостатком данного способа является то, что у водителя, помимо кратчайшего маршрута, могут быть и другие приоритеты во время поездки, о которых он не может заявить такой системе заблаговременно перед поездкой на необходимый ему период времени. При данном способе каждому водителю, после подачи заявки на передвижение, системой автоматически рассчитывается кратчайший маршрут, и, директивно, в условия транспортного коллапса, указывается запрет на выезд с обратным отсчетом времени выезда на маршрут. В случае несоблюдения предписаний, предполагается либо административное наказание, либо водителю предлагается заплатить за разрешение на выезд. Очевидно, что в случае такой оплаты за право выезда, водитель может попадать в транспортный коллапс по своей же собственной вине, т.к. своим выездом он будет превышать существующий трафик. Данный способ нельзя назвать полезным для водителей и эффективным для предотвращения транспортных коллапсов потому, что пользовательское равновесие Уордропа рассчитывается, исходя из одного критерия поездки - поиска системой кратчайшего маршрута или времени поездки. Однако помимо кратчайшего маршрута у водителей могут существовать и другие приоритеты, такие, как: время выезда, время прибытия в пункт назначения, время передвижения по маршруту (не обязательно кратчайшее), маршрут (не обязательно кратчайший), стоимость самой поездки и др. По этим критериям, аналогичным образом, как и по критерию поиска кратчайшего маршрута Уордропа, также возможно расписать пользовательское равновесие. Однако по какому бы из вышеуказанных критериев не было расписано транспортное равновесие, оно не будет являться эффективным средством предотвращения транспортных коллапсов до тех пор, пока у самих водителей не появится возможность заявлять системе о необходимых им критериям поездки и приоритетов между ними, не учитываемые ни одной существующей системой. При этом, если предположить, что приоритетом водителя будет являться собственный уникальный маршрут, указанный им системе декларативно, и этот приоритет будет критерием для расчета пользовательского равновесия, осуществляемого по принципу Уордропа, то в рамках указанной системы расчет такого равновесия будет невозможен.
Известна система (Патент №RU 2572279 С1 «Система для планирования мультимодального маршрута поездки»), в котором водителям предлагается на выбор различные маршруты.
Недостаток такой системы состоит в том, что расчет маршрутов осуществляется системой только по одному критерию поездки - пункта назначения, а у водителя отсутствует возможность заявить системе множество критериев и приоритетов своей поездки, а также нет возможности заявлять системе об изменении пункта назначения, и других критериев и приоритетов поездки во время осуществления поездки.
Известна система (Патент №RU 2459262 С2. «Улучшенное навигационное устройство и способ»), в котором предусмотрен режим «свободного вождения» после регистрации выбранного пользователем маршрута.
Недостаток такой системы состоит в том, что расчет маршрутов осуществляется системой только по одному критерию поездки - пункта назначения, а у водителя отсутствует возможность заявить системе множество критериев и приоритетов своей поездки, а также нет возможности заявлять системе об изменении пункта назначения, и других критериев и приоритетов поездки во время осуществления поездки. При этом такой системой не предусматривается фиксация отклонений, которые может допускать пользователь во время осуществления выбранного маршрута, соответственно, такая система не сможет информировать всех участников транспортного процесса о причинах и обстоятельствах возникновения транспортных заторов и коллапсов, и упреждать причины их возникновения.
Предлагаемое техническое решение позволяет водителю заблаговременно заявлять системе о цели своей поездки с указанием приоритетных условий ее выполнения, включая целевой адрес поездки, период времени ее осуществления, расход топлива и т.п.
Расчет пользовательского равновесия осуществляется системой по набору значений критериев и приоритетов поездки, сообщаемых водителями в заявках на взаимодействие с системой, что позволяет системе более гибко учитывать основные цели поездок водителей и рассчитывать им такие варианты поездок, которые будут наиболее близки их предпочтениям.
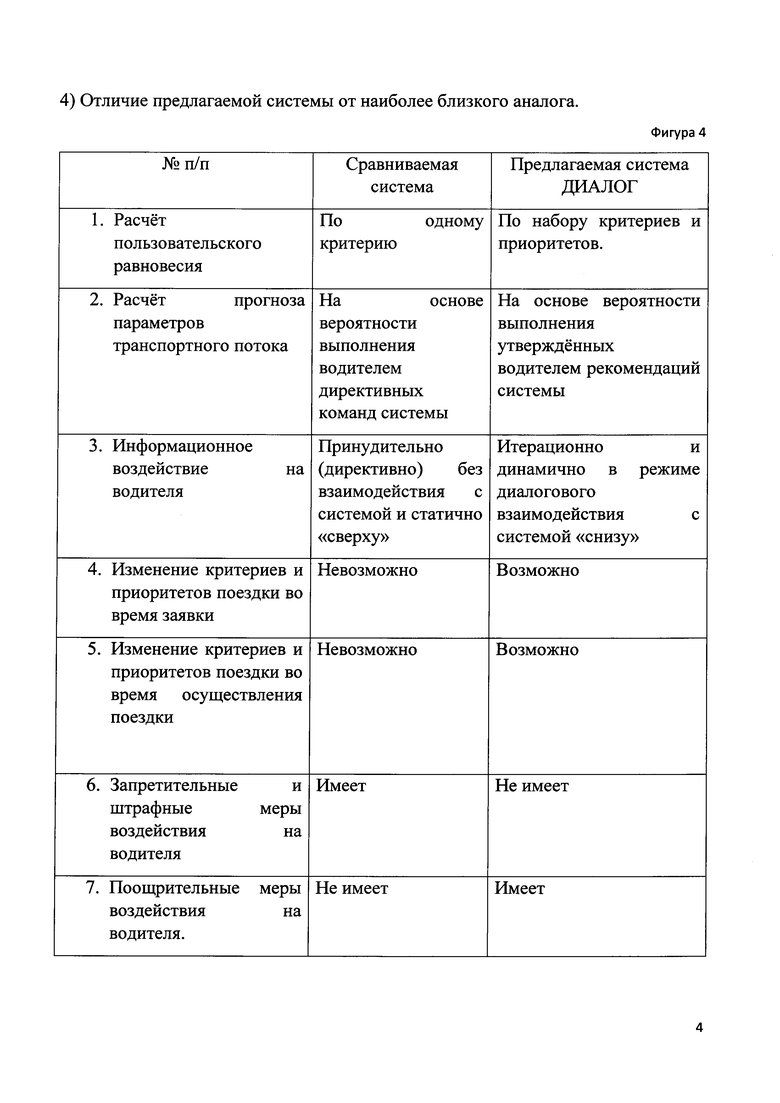
На фигуре 4 (см. раздел «Чертежи и другие материалы») изображена таблица, в которой показаны критериальные отличия предлагаемого способа от наиболее близкого аналога.
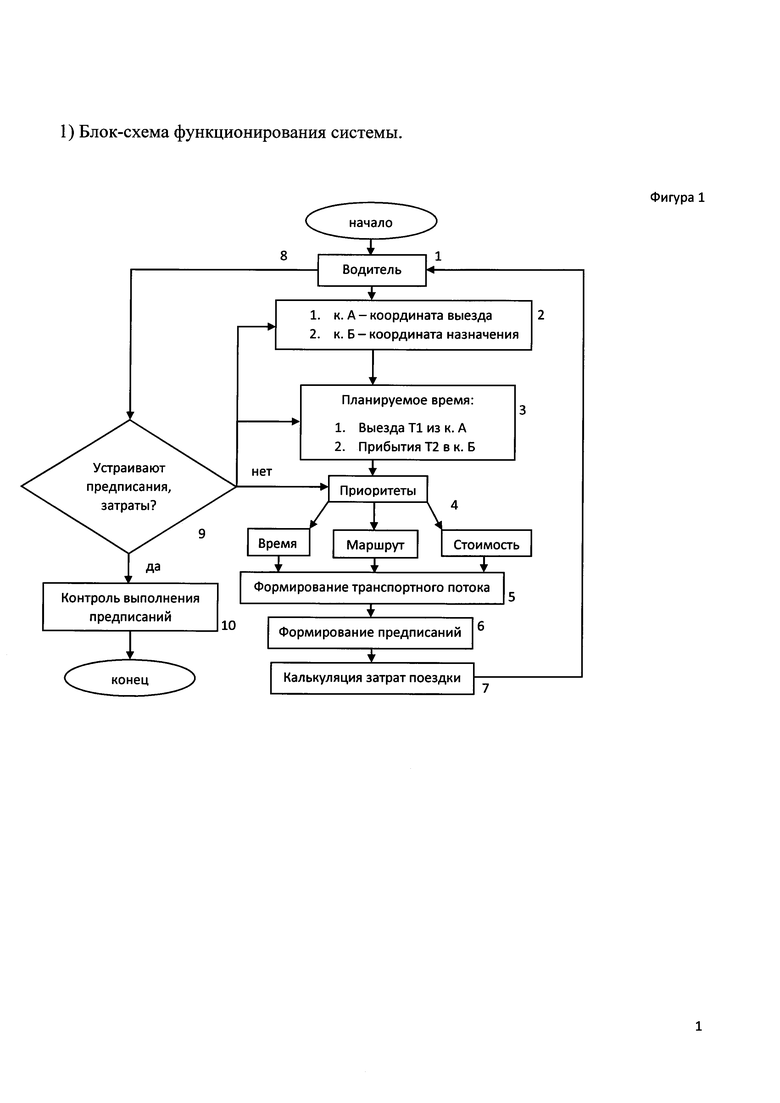
На Фигуре 1 (см. раздел «Чертежи и другие материалы») изображена блок-схема функционирования предлагаемого способа, отличающаяся тем, что имеет условный блок, позволяющий водителю как утверждать предложенные системой варианты поездки, так и изменять ранее заявленные значения критериев планируемой поездки и приоритетов между ними вплоть до получения системой от водителя информации об устраивающим его варианте поездки, которая функционирует следующим образом:
Шаг 1: Водитель - пользователь и абонент системы, успешно прошедший процедуру регистрации, при которой указал: а) персональные данные б) страховые данные в) тип и марку транспортного средства г) государственный номер д) марку топлива е) марку горюче-смазочных материалов ж) пробег транспортного средства з) литраж двигателя и т.п.
Шаг 2: Водитель, по средством диалогового интерфейса, на периферийном устройстве ввода-вывода данных, сообщает системе координаты выезда (к. А) и назначения (к. Б).
Шаг 3: Водитель указывает планируемое время выезда (Т1) из к. А и время прибытия (Т2) в к. Б.
Шаг 4: Водитель указывает один из трех предлагаемых системой приоритетов: время, маршрут, стоимость. При этом водитель, выбрав в приоритете:
а) Время. Водитель указывает либо время выезда, либо время прибытия. Если выбирает время выезда, то он пренебрегает временем прибытия, а если выбирает время прибытия, то пренебрегает временем выезда. В любом случае, система заблаговременно, до начала поездки информирует водителя о времени начала осуществления поездки, маршруте и скоростном режиме прохождения по каждому участку маршрута, времени парковочной сессии. При этом водитель пренебрегает остальными приоритетами: маршрутом и стоимостью поездки.
б) Маршрут. Водитель принудительно и строго указывает системе все участки запланированного маршрута поездки. При этом, водитель пренебрегает как временем выезда, временем прибытия, так и стоимостью поездки. Либо водитель указывает системе рассчитать ему кратчайший маршрут. Либо водитель указывает системе указать ему оптимальный маршрут.
в) Стоимость. Водитель пренебрегает как временем, так и маршрутом поездки.
г) Водитель имеет возможность указать системе одновременно несколько приоритетов.
При этом, водитель понимает следующий принцип: чем раньше он сообщит системе о своих запланированных поездках, тем потенциально получит от системы более выгодные условия их реализации.
Шаг 5: На основе заявок системой формируется образ транспортного потока так, если бы все заявки осуществлялись, исходя из суммарных намерений всех водителей, так, как есть.
Шаг 6: Системой формируются (генерируются) предписания (инструкций) уникальных условий реализации транспортных намерений (поездок) для каждого конкретного водителя в индивидуальном порядке, исходя из знаний системы о пропускной способности УДС и не допущения вероятности возникновения транспортного коллапса, т.е. не превышения транспортных намерений всех водителей над пропускной способностью УДС и загрузки парковочного пространства.
Шаг 7: Системой осуществляется калькуляция затрат водителя на осуществление поездки: топлива, горюче-смазочных материалов, времени поездки, нормо-часов пробега и т.п.
Шаг 8: Водитель получает от системы информацию в виде множества вариантов действий (уникальных инструкций) об условиях реализации транспортных намерений (поездок), которой он должен будет неукоснительно следовать в процессе осуществления поездки.
Шаг 9: В случае, если водителя устраивает хотя бы одно предписание (инструкция) системы из множества предложенных, то система фиксирует его в своей базе знаний и осуществляет контроль его выполнения в процессе осуществления поездки посредством масштабно-координатного устройства определения географического положения транспортного средства, и, в случае, если водителя не устраивает ни одно предлагаемое системой предписание, то заявка автоматически отправляется в блок корректировки исходных данных (п. №2, №3) и/или приоритетов (п. №4) для изменения водителем исходных данных заявки, до тех пор, пока система не рассчитает для водителя устраивающее предписание системы и затрат на поездку.
Шаг 10: Системой осуществляется контроль выполнения водителем предписаний системы, которые утвердил водитель, во время которого рассчитываются отклонения, которые допускает водитель во время поездки.
Согласно описанию Фигуры 1 возможно разработать СМО со следующим функционалом.
Во время регистрации в СМО пользователь (водитель) указывает свои личные данные и данные своего транспортного средства, после чего водителем составляется заявка на поездку, содержащая следующий набор критериев и приоритетов поездки:
a) Планируемое время выезда Т1 (или временные рамки ΔT1)
b) Планируемую координату прибытия
c) Планируемое время прибытия Т2 (или временные рамки ΔТ2)
d) Планируемый маршрут
e) Планируемый скоростной режим V (или диапазон скорости ΔV)
f) Планируемые затраты на поездку, стоимость
g) Планируемую длительность парковочной сессии
h) Планируемые приоритеты поездки между критериями [a-g]
После получения заявки, на основе ее данных, а также данных о пропускной способности УДС и аналогичных регистрируемых заявках других пользователей, СМО генерируется и направляется на выбор пользователю набор (от 1 до n) инструкций, каждая из которых имеет уникальный набор критериев, подлежащих утверждению пользователем:
- Утвержденное время выезда (или временные рамки ΔT1)
- Утвержденную координату прибытия
- Утвержденное время прибытия (или временные рамки ΔТ2)
- Утвержденный маршрут
- Утвержденный скоростной режим (или диапазон скорости ΔV)
- Утвержденную стоимость поездки
- Утвержденную длительность парковочной сессии
и пользователь может выбрать только одну из них. В случае, если пользователь выбирает 1 из n предложенных системой инструкций, то это означает, что он утвердил, и согласился выполнять все ее критерии, и его заявка считается в СМО зарегистрированной, как единица транспортной нагрузки, т.е. одной заявке принадлежит одна инструкция, и СМО контролирует соблюдение ее выполнения, во время которого фиксируются возможные отклонения, которые может допускать пользователь. В случае, если пользователь отклоняет все инструкции, то СМО предлагает пользователю изменить в поданной заявке значения критериев и приоритетов поездки для получения новых инструкций. Взаимодействие с пользователем продолжается до тех пор, пока заявка регистрируется, и СМО осуществляет контроль ее выполнения, либо пользователь отказывается от взаимодействия с СМО. Правилами генерации инструкций СМО обеспечивается баланс между транспортными потребностями водителей и пропускной способностью улично-дорожной сети, в рамках соблюдения правил дорожного движения.
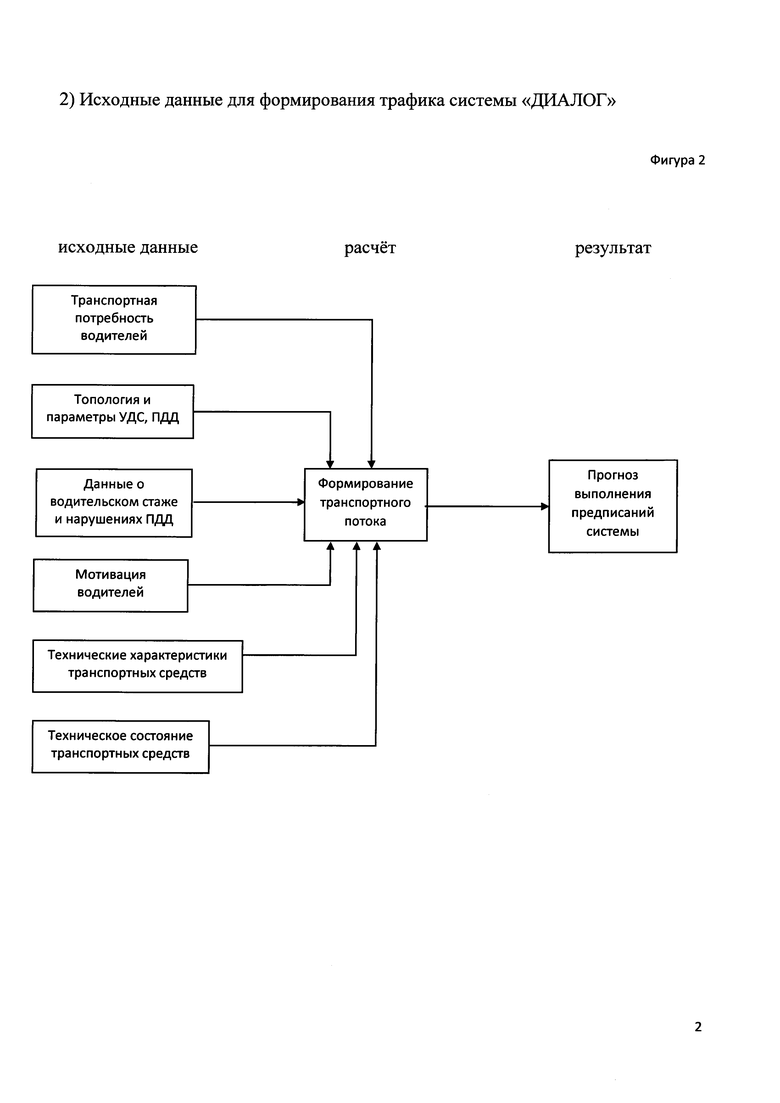
Согласно Фигуре 2 (см. раздел «Чертежи и другие материалы») изображена схема, на которой показаны исходные данные для расчета системой прогнозов автомобильного трафика, отличающаяся тем, что водитель при регистрации имеет возможность указать системе о характеристиках транспортного средства, набор критериев и приоритетов между ними в своих заявках на передвижение, на основании которых система прогнозирует будущий трафик, основанный на утвержденных водителями вариантах будущих поездок.
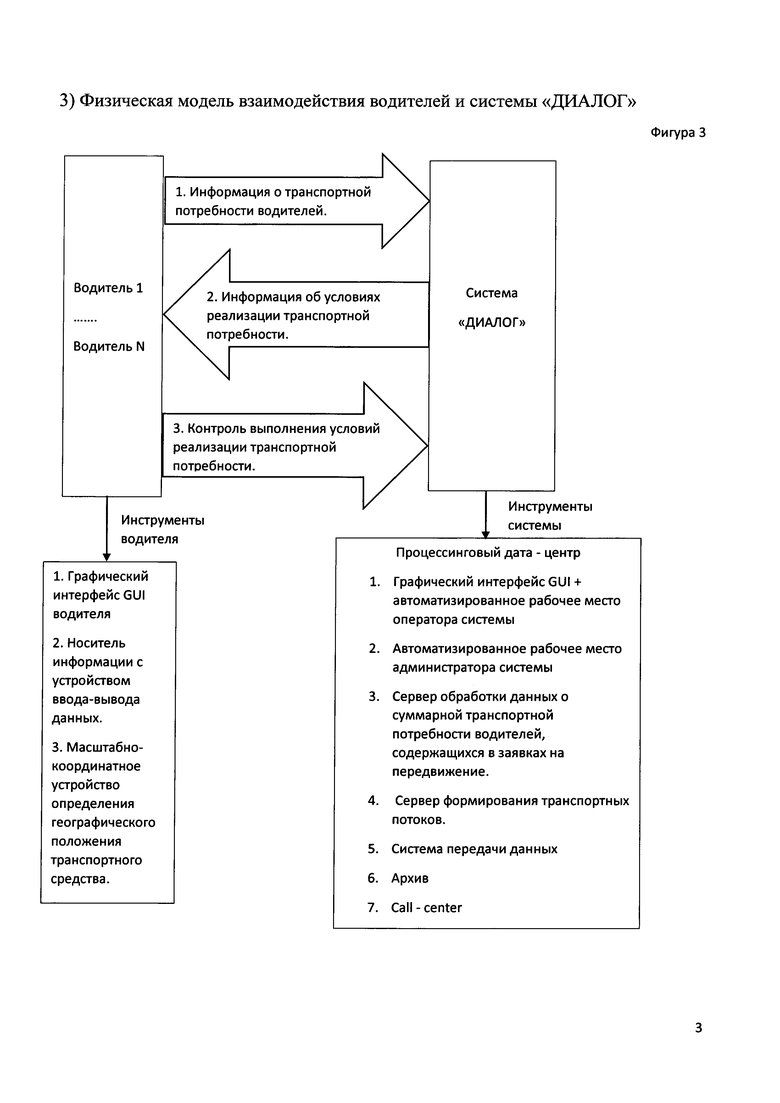
Согласно Фигуре 3 (см. раздел «Чертежи и другие материалы») изображена схема взаимодействия оборудования, предназначенного для водителей, состоящего из носителя информации с устройством ввода-вывода данных, масштабно-координатного устройства определения географического положения транспортного средства с оборудованием системы, состоящего из сервера обработки данных, сервера формирования образа транспортных потоков, сервера архива данных, системы передачи данных и автоматизированных мест оператора и администратора системы, отличающаяся тем, что позволяет водителю быть на постоянной связи с системой как во время согласования варианта поездки, так и во время осуществления поездки.
Таким образом, предлагаемая система направлена на достижение устойчивого баланса между транспортными потребностями всех водителей и пропускной способностью УДС в рамках соблюдения ПДД, которая не ограничивает окончательные действия водителей. Указанный в описании функционал может быть дополнен, например, по желанию пользователей, значимостью приоритетов между критериями, а также интегрировать в себя функции существующих систем навигации и перспективных систем, обладающих элементами искусственного интеллекта.
Предлагаемая система будет способна противостоять возможности возникновения транспортных коллапсов при условии включения в ее пользователи не менее 95% всех водителей, как участников транспортного процесса и соблюдения ими предписаний системы.
Изобретение относится к области регулирования дорожного движения, а именно к формированию транспортных потоков. Динамическая система формирования транспортных потоков состоит из устройства, периферийного оборудования и центрального оборудования, с программно-аппаратным комплексом, рассчитывающим условия реализации поездки. После регистрации заявки в системе пользователь выбирает набор критериев для поездки, система рассчитывает множество маршрутов и выдает их пользователю. Если пользователь выбирает один из предложенных маршрутов, то система сохраняет его и контролирует выполнение маршрута, после окончания поездки система производит калькуляцию действительных затрат на поездку. Если пользователя не устраивают предложенные маршруты, то он корректирует исходные критерии до тех пор, пока система не предложит устраивающий пользователя маршрут. Обеспечивается баланс между транспортными потребностями водителей и пропускной способностью УДС, в рамках соблюдения ПДД. 5 з.п. ф-лы, 4 ил. 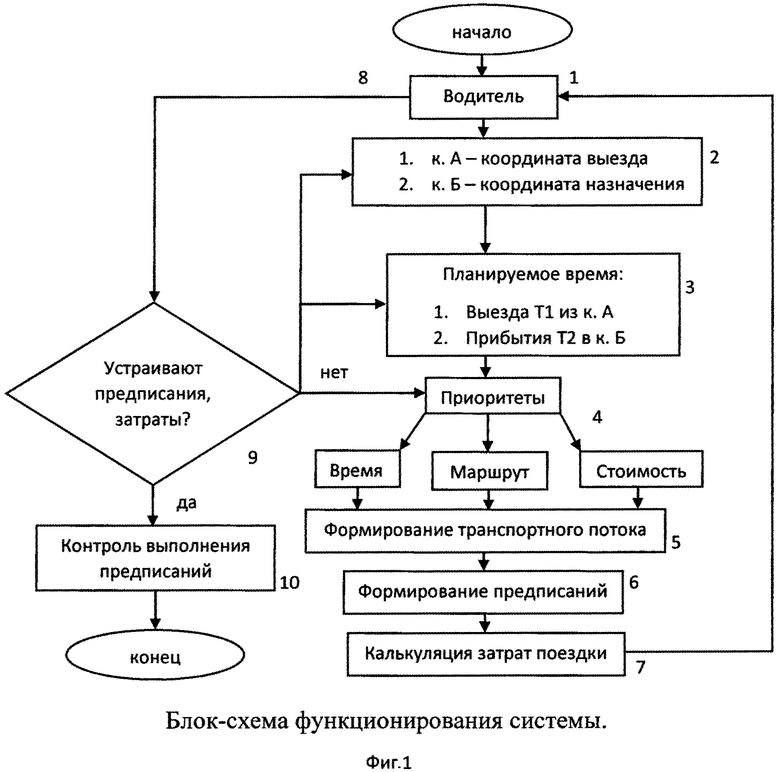
1. Динамическая система формирования транспортных потоков, содержащая устройства для определения местоположения транспортного средства и характеристик транспортного средства, устройства ввода-вывода и передачи графической и текстовой информации, посредством которых осуществляется передача заявки на поездку системе, и центральное оборудование, рассчитывающее условия реализации поездки исходя из данных о сумме всех заявок водителей, отличающаяся тем, что система выполнена с возможностью принятия от водителей набора критериев на поездку и приоритетов между ними, расчета и передачи водителям множества вариантов осуществления поездки, каждый из которых содержит уникальный набор критериев, изменения или корректировки, в любой момент движения, критериев и приоритетов между ними, для расчета более оптимального варианта движения, фиксации конечного результата в базе знаний и осуществления контроля за выполнением варианта до конца поездки, не применения санкций в отношении водителя, в случае отклонения от предложенного варианта, калькуляции действительных затрат на поездку, после окончания поездки.
2. Система по п. 1, отличающаяся тем, что расчет прогнозов трафика осуществляется на основе вероятности выполнения водителями утвержденных предписаний системы.
3. Система по п. 1, отличающаяся тем, что позволяет водителю заблаговременно планировать и бронировать свои поездки на необходимый период времени с возможностью предварительной оплаты дорожных сервисов: парковок, платных дорог.
4. Система по п. 1, отличающаяся тем, что позволяет водителю заблаговременно получать калькуляцию прогноза материальных и нематериальных затрат на осуществление каждого предложенного системой варианта поездки.
5. Система по п. 1, отличающаяся тем, что имеется голосовое обращение к системе.
6. Система по п. 1, отличающаяся тем, что информирует всех участников транспортного процесса о причинах и обстоятельствах возникновения транспортных коллапсов в режиме реального времени.
| СПОСОБ ОРГАНИЗАЦИИ СИСТЕМЫ НАВИГАЦИИ И УПРАВЛЕНИЯ ДОРОЖНЫМ ДВИЖЕНИЕМ | 2012 |
|
RU2507583C2 |
| СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ МУЛЬТИМОДАЛЬНОГО МАРШРУТА ПОЕЗДКИ | 2014 |
|
RU2572279C1 |
| УЛУЧШЕННОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ | 2007 |
|
RU2459262C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГИСТРАЦИИ ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2178585C1 |

