Область техники, к которой относится изобретение
Настоящее изобретение относится к сканирующему устройству для сканирования объекта, в частности для сканирования трехмерной поверхности объекта.
Кроме того, настоящее изобретение относится к способу позиционирования сканирующего устройства относительно сканируемого объекта.
Уровень техники
В сканирующих устройствах обычно используется датчик изображения для сбора светового излучения, отраженного от объекта, для построения изображения объекта. Датчик изображения преобразует световую энергию в электрический заряд и в конечном итоге в совокупность двоичных единиц информации, представляющих цвет и интенсивность светового излучения. Получаемое в результате цифровое изображение представляет, например, двумерное изображение относительно плоского объекта, такого как бумага, помещенная, например, на планшетный сканер.
3D сканирование - это технология преобразования геометрической конфигурации или формы объекта в точечное множество данных. Каждая точка может представлять реальную точку, представленную в трехмерном пространстве, поверхности просканированного объекта. Собранные данные могут использоваться для построения цифровых трехмерных моделей. Собранные трехмерные данные используются в самых разных областях применения. Например, технология 3D сканирования широко используется в индустрии развлечений при создании кинофильмов и видеоигр. В число других широко распространенных приложений данной технологии входят промышленный дизайн, ортопедия и протезирование, обратное проектирование и прототипирование, контроль/проверка качества и документирование исторических артефактов.
В частности, могут быть собраны трехмерные данные человеческих лиц. Зафиксированные контур и геометрия лица могут использоваться для создания масок, применяемых в различных областях медицины, в том числе при поддержке CPAP (постоянного положительного давления в дыхательных путях). Точное 3D моделирование контура лица облегчает изготовление хорошо прилегающих масок, устраняя проблему утечек воздуха, которые могут вызывать раздражение глаз.
Существует множество различных технологий, которые могут использоваться для построения 3D сканирующего устройства. Согласно одной широко известной классификации технология сканирования подразделяется на два типа: контактное и бесконтактное 3D сканирование.
Контактные 3D сканеры исследуют объект посредством физического касания, когда объект соприкасается с прецизионной плитой, имеющей плоскую поверхность, или покоится на ней. Данный вид технологии сканирования главным образом используется при производстве и может обладать очень высокой точностью. Недостаток контактного сканирования заключается в том, что требуется контакт со сканируемым объектом. Таким образом, объект может изменяться или повреждаться в процессе сканирования. Кроме того, данная технология сканирования обычно является очень медленной по сравнению с другими способами сканирования. Помимо этого, нежелательно использовать такой 3D контактный сканер для сканирования контура человеческого лица.
Другой распространенный вид технологий 3D сканирования - активное бесконтактное сканирование. «Активное» означает, что соответствующий сканер излучает некоторого вида закодированную, структурированную или незакодированную энергию, такую как световое излучение, и обнаруживает отражение упомянутой энергии на сканируемом объекте с целью исследования объекта и получения соответствующего 3D изображения.
Активные 3D сканеры бесконтактного типа наиболее часто построены на использовании триангуляции. В данном случае сканер, например, направляет лазерный луч на объект и использует камеру для поиска местоположения пятна лазерного луча. В зависимости от того, насколько далеко лазерный луч попадает на поверхность объекта, пятно лазерного луча оказывается в различных местах поля обзора камеры. Базовая технология называется триангуляцией, поскольку пятно лазерного луча, камера и лазерный излучатель образуют треугольник.
Вместо одного пятна лазерного луча на объект может проецироваться структура светового излучения. Такой вид сканера называется сканером структурированного света и может рассматриваться в качестве активного бесконтактного сканера. Структура может представлять собой одномерную структуру, например линию, или двумерную структуру, например решетку, или структуру из линейных полос. Световая структура проецируется на объект с использованием, например, ЖК-проектора. Камера, незначительно смещенная от проектора структуры, захватывает структурированный свет из точки обзора камеры. Затем захваченное изображение анализируется и оценивается искажение структуры. С помощью алгоритма на основе триангуляции вычисляется расстояние до каждой точки структуры. Путем перемещения световой структуры по поверхности объекта можно получить 3D изображение объекта. 3D сканеры структурированного света обеспечивают очень быстрое сканирование. Вместо сканирования одной точки или линии в каждый момент времени сканеры структурированного света могут сканировать множество точек или линий, либо сразу все поле обзора.
Однако для получения надлежащих сканов сканер должен располагаться на определенном расстоянии от объекта и/или под определенным углом к нему. Для надлежащей установки сканера широко используется, например, статическая структура наведения, содержащая маркеры, которые требуется совместить с чертами лица путем перемещения и поворота удерживаемого в руке сканера. Например, глаза на человеческом лице должны быть совмещены со спроецированными кругами, а перекрестье должно совмещаться с кончиком носа. Такие процедуры установки, однако, позволяют получить лишь довольно неточные результаты и не вполне интуитивно понятны для специалистов по сну, использующих такие сканеры. Кроме того, если объект и сканер могут свободно перемещаться (например, при сканировании головы человека без опоры для подбородка с помощью ручного сканера), пользователь может испытывать трудности при оценке должного положения сканирующего луча. Следовательно, требуется некоторый вид обратной связи или содействие для правильного позиционирования сканирующего устройства относительно сканируемого объекта.
В публикации Glossop и др. “Laser projection augmented reality system for computer-assisted surgery”, International Congress Series, Excerpter Medica, Амстердам, Нидерланды, том 1256, 1 июня 2003 г., стр. 65-71, раскрыто универсальное устройство дополненной реальности, в котором используется быстро сканирующий лазер для отображения информации непосредственно на пациенте, используя пациента в качестве «проекционного экрана», при этом устройство способно определять местоположение спроецированных лазерных пятен с помощью 3D камеры.
В US 2011/002510 A1 раскрыто ручное или установленное с возможностью регулировки устройство для распознавания по радужной оболочке глаза, в котором обратная связь с оператором обеспечивается освещением видимым светом или изображением, спроецированным на лицо субъекта.
В US 2009/283598 A1 раскрыта система идентификации изображения, содержащая контроллер, осуществляющий синхронизацию системы идентификации изображения для захвата отраженного лазерного пучка на первом отрезке времени интегрирования, и для захвата изображения окружающей среды, распознанного системой идентификации изображения, на втором отрезке времени интегрирования, который больше первого отрезка времени интегрирования.
В US 2007/098234 A1 раскрыт маркер, обнаруживаемый визуальными средствами, содержащий полигональную краевую область, имеющую по меньшей мере четыре неколлинеарные угловые точки, при этом маркер несет на себе структуру в двоичном цифровом коде.
В US 2002/172415 A1 раскрыто устройство для представления информации, содержащее устройство регистрации трехмерных данных моделирования, при этом предусмотрено проекционное устройство для проецирования на объект маркера, для которого известно соотношение положения/ориентации в трехмерном пространстве с объектом фотосъемки.
В US 2010/079481 A1 раскрыты способ и система для маркировки съемочного плана и изображений съемочного плана ярлыками, при этом набор ярлыков проецируется на съемочный план при одновременной модуляции интенсивности каждого ярлыка согласно индивидуальному коду, изменяющемуся во времени.
В US 8,504,136 B1 раскрыты способ и устройство для преобразования и отображения изображений внутренних органов и тканей, полученных от расположенных внутри устройств визуализации, снаружи на кожном покрове.
В US 6,314,311 B1 раскрыта система регистрации для использования в сочетании с хирургической системой с визуальным контролем, включающая в себя устройство визуализации для медицинской диагностики, предназначенное для сбора данных изображения, получаемых от субъекта, и процессор для обработки данных изображения для реконструкции изображения субъекта из данных изображения.
Раскрытие изобретения
Таким образом, задача настоящего изобретения заключается в создании сканирующего устройства и способа, помогающего пользователю в нахождении правильного положения и/или правильной ориентации сканирующего устройства относительно сканируемого объекта.
В первом аспекте настоящего изобретения представлено сканирующее устройство для сканирования объекта, содержащее проекционный блок для проецирования установочного изображения на объект, при этом упомянутое установочное изображение содержит главную структуру, блок захвата изображения для захвата выдаваемого камерой прямого изображения объекта, при этом упомянутое выдаваемое камерой прямое изображение содержит производную структуру главной структуры, при этом производная структура является производной от главной структуры и представляет упомянутое спроецированное установочное изображение на виде с позиции блока захвата изображения и блок установки для обеспечения индикации правильного положения и/или правильной ориентации сканирующего устройства относительно сканируемого объекта на основании захваченного выдаваемого камерой прямого изображения.
В дополнительном аспекте настоящего изобретения представлен способ позиционирования сканирующего устройства относительно сканируемого объекта, при этом способ содержит проецирование установочного изображения на объект, при этом упомянутое установочное изображение содержит главную структуру, захват выдаваемого камерой прямого изображения объекта, при этом упомянутое выдаваемое камерой прямое изображение содержит производную структуру главной структуры, при этом производная структура является производной от главной структуры и представляет упомянутое спроецированное установочное изображение на виде из точки захвата изображения, обеспечение индикации правильного положения и/или правильной ориентации сканирующего устройства относительно сканируемого объекта на основании захваченного выдаваемого камерой прямого изображения.
Проекционный блок сканирующего устройства, например, может представлять собой LCD проектор или любой другой стабильный источник света, способный проецировать установочное изображение, содержащее главную структуру, на объект. Обычно в качестве блока захвата изображения используется прибор с зарядовой связью или CMOS датчик для захвата выдаваемого камерой прямого изображения. Поскольку сканирующее устройство основано на принципе структурированного света, проекционный блок проецирует структуру светового излучения на объект и оценивает деформацию упомянутой структуры на объекте для построения 3D изображения сканируемого объекта. Чтобы получить точные сканы и гарантировать, что сканируемый объект находится в рабочем диапазоне сканера, положение и/или ориентация сканирующего устройства должны быть выверены в отношении объекта, т.е. сканирующее устройство должно располагаться в определенном диапазоне расстояний/углов относительно объекта. Пользователь может очень легко отрегулировать положение и/или ориентацию, просто перемещая сканирующее устройство относительно объекта на основании выданной индикации. Для выдачи индикации сканирующее устройство может оценить захваченное выдаваемое камерой прямое изображение и может определить возможное несовпадение сканирующего устройства на основании упомянутой оценки. В данном случае индикация содержит информацию о найденном несовпадении. В качестве альтернативы оператор сканирующего устройства производит оценку отклонения сканирующего устройства от правильного положения и/или правильной ориентации на основании индикации, при этом сканирующее устройство не оценивает правильность положения сканирующего устройства до проведения индикации. В силу малой сложности предложенная регулировка положения сканирующего устройства может выполняться очень быстро.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения. В первом варианте осуществления проекционный блок выполнен с возможностью проецирования статичной главной структуры, при этом блок установки представляет собой блок совмещения, выполненный с возможностью корректировки установочного изображения путем совмещения захваченного выдаваемого камерой прямого изображения и статичной главной структуры, при этом скорректированное установочное изображение указывает правильное положение и/или правильную ориентацию сканирующего устройства относительно сканируемого объекта, если статичная главная структура и производная структура по существу совпадают в скорректированном установочном изображении. Другими словами, пользователь сканера интуитивно понимает, что сканирующее устройство установлено правильно, как только статичная главная структура и производная структура по существу совпадут в скорректированном установочном изображении. В данном варианте осуществления нет необходимости в реализации сложных алгоритмов в сканирующем устройстве для оценки правильности расположения сканирующего устройства. По сравнению с автоматической процедурой совмещения, которая, например, может дать сбой из-за волосяного покрова лица и движения сканера или объекта, приводящего к размытости изображения, выдаваемого камерой, предложенная ручная установка сканирующего устройства, используя подсознательную визуальную обратную связь пользователя, представляет весьма надежное решение.
В дополнительном варианте осуществления проекционный блок выполнен с возможностью проецирования главной структуры, содержащей базовую структуру, при этом правильное положение и/или правильная ориентация представляют собой правильное расстояние сканирующего устройства относительно сканируемого объекта. Базовая структура может содержать, например, круг и две линии, пересекающиеся в центре круга. Блок захвата изображения, который незначительно смещен от проекционного блока, захватывает упомянутую базовую структуру с позиции блока захвата изображения. Если статичная главная структура и производная структура не совпадают в скорректированном установочном изображении, расстояние до объекта установлено неверно. Следовательно, пользователь должен переместить сканирующее устройство ближе или дальше от объекта. С помощью наложенных структур расстояние от сканирующего устройства до сканируемого объекта может регулироваться очень быстро простым, интуитивно понятным и более надежным способом.
В дополнительном варианте осуществления проекционный блок выполнен с возможностью проецирования главной структуры, содержащей базовую структуру и дополнительную структуру, при этом правильное положение и/или правильная ориентация представляют собой правильный угол расположения сканирующего устройства относительно объекта. Помимо базовой структуры главная структура может также содержать дополнительную структуру, образованную, например, двумя дополнительными линиями, расположенными на двух разных сторонах за пределами круга базовой структуры. Главная структура, как указано в данном варианте осуществления, способствует регулировке расстояния и/или угла сканирующего устройства относительно сканируемого объекта. Таким образом, пользователю может также потребоваться повернуть сканирующее устройство относительно объекта, если статичная главная структура и производная структура не совпадают в скорректированном установочном изображении. Визуальная обратная связь между статичной главной структурой и производной структурой, которые содержатся в установочном изображении, приводит к быстрому, простому, интуитивно понятной и более надежной установке углового положения сканирующего устройства.
В другом варианте осуществления сканирующее устройство дополнительно содержит блок обработки данных для обработки захваченного выдаваемого камерой прямого изображения, который выполнен с возможностью подачи обработанного выдаваемого камерой прямого изображения в блок совмещения. С помощью блока обработки данных выдаваемое камерой прямое изображение может быть преобразовано перед совмещением с главной структурой. Это приводит к повышению качества скорректированного установочного изображения, а значит, способствует более точной установке сканирующего устройства относительно объекта.
В дополнительном варианте осуществления блок обработки данных выполнен с возможностью масштабирования выдаваемого камерой прямого изображения. Функция масштабирования может использоваться для согласования формата блока захвата изображения и проекционного блока. Поскольку блок обработки данных может использоваться для синхронизации графических параметров проекционного блока и блока захвата изображения, можно достичь очень гибкого сочетания проекционного блока и блока захвата изображения. Кроме того, повышается качество совмещения статичной главной структуры и выдаваемого камерой прямого изображения, что способствует более точной установке сканирующего устройства. В качестве альтернативы коэффициент масштабирования может быть дополнительно увеличен для повышения чувствительности визуальной обратной связи и уменьшения появления посторонних изображений текстуры.
В другом варианте осуществления блок обработки данных выполнен с возможностью трансформации выдаваемого камерой прямого изображения, так что главная структура и производная структура по существу совпадают в скорректированном установочном изображении, когда сканирующее устройство установлено правильно по отношению к калибровочному объекту. В данном варианте осуществления сканирующее устройство позволяет сначала установить сканирующее устройство относительно калибровочного объекта. Для этого калибровочного объекта пользователь знает надлежащее расстояние и надлежащий угол. Это означает, что статичная главная структура и производная структура теоретически должны совпадать в скорректированном установочном изображении, если сканирующее устройство расположено на известном расстоянии и под известным углом. В случае несовпадения упомянутых структур блок обработки данных выполнен с возможностью преобразования выдаваемого камерой прямого изображения таким образом, что главная структура и производная структура в конечном итоге совпадут в скорректированном установочном изображении. Найденная трансформация хранится и используется в цепи визуальной обратной связи. Эта мера улучшает визуальную обратную связь.
В дополнительном варианте осуществления блок совмещения выполнен с возможностью применения иной яркости и/или другого цвета к захваченному выдаваемому камерой прямому изображению, чем к главной структуре. Неодинаковые яркость и/или цвет позволят легче различить главную структуру и производную структуру. В результате пользователь может точнее установить сканирующее устройство.
В другом варианте осуществления блок совмещения выполнен с возможностью многократной корректировки установочного изображения путем многократного совмещения непрерывно захватываемого выдаваемого камерой прямого изображения и главной структуры. В данном варианте осуществления пользователь получает непрерывную визуальную обратную связь при изменении положения и/или ориентации сканирующего устройства. Следовательно, эта мера ускоряет настройку сканирующего устройства.
В дополнительном варианте осуществления сканирующее устройство выполнено с возможностью подавления или избегания ложных структур в скорректированном установочном изображении. При многократной корректировке установочного изображения путем многократного совмещения непрерывно захватываемого выдаваемого камерой прямого изображения и главной структуры скорректированное установочное изображение может содержать много ложных структур, являющихся следствием замкнутого контура, образуемого проекционным блоком, блоком захвата изображения и блоком совмещения. Хотя ложные структуры могут не восприниматься в качестве помехи, поскольку упомянутые структуры отклоняются в одном направлении, и даже могут помогать пользователю в процессе точной настройки положения, ложные структуры можно эффективно подавить или даже избежать в некоторых вариантах осуществления.
В другом варианте осуществления блок совмещения выполнен с возможностью подавления ложных структур путем усиления контраста выдаваемого камерой прямого изображения для отделения производной структуры от фона выдаваемого камерой прямого изображения и нормализации яркости выдаваемого камерой прямого изображения, так чтобы эта яркость составляла заданную долю яркости главной структуры. Благодаря таким мерам установочное изображение по существу содержит только статичную главную структуру и производную структуру, которая в данном варианте осуществления образована лишь главной структурой с позиции блока захвата изображения. Ложные структуры и другое содержимое изображений, не относящееся к спроецированным структурам (двойные ложные носы/глаза и т.д.), подавляются. В результате внимание пользователя сосредоточено лишь на этих двух структурах.
В дополнительном варианте осуществления блок захвата изображения выполнен с возможностью устранения ложных структур путем синхронизации работы блока захвата изображения и проекционного блока так, что производная структура и захваченное выдаваемое камерой прямое изображение образуются только главной структурой на виде с позиции блока захвата изображения. Если статичная главная структура известна блоку захвата изображения, блок захвата изображения обладает возможностью сбора изображений, которые содержат только главную структуру с позиции блока захвата изображения. Следовательно, с помощью этой меры можно эффективно устранить ложные структуры.
В дополнительном варианте осуществления проекционный блок выполнен с возможностью проецирования изображения в скорректированной конфигурации, используя первый канал цветности для главной структуры и используя второй канал цветности для производной структуры, при этом блок захвата изображения выполнен с возможностью захвата выдаваемого камерой прямого изображения, используя по меньшей мере первый канал цветности. В данном варианте осуществления предпочтительно используются цветной проекционный блок и цветной блок захвата изображения. Путем проецирования и получения главной структуры и производной структуры с использованием каналов цветности можно избежать образования ложных структур, способных ввести в заблуждение.
В другом варианте осуществления сканирующее устройство выполнено с возможностью определения трехмерных данных, представляющих трехмерную геометрию по меньшей мере части объекта. 3D сканер исследует объект для сбора данных о его форме и возможно о его внешнем виде (например, цвете). Собранные трехмерные данные могут использоваться для построения цифровых трехмерных моделей. Трехмерные данные могут использоваться в самых разных областях применения. Например, они могут использоваться в индустрии развлечений при создании кинофильмов и видеоигр. В число других широко распространенных приложений данной технологии входят промышленный дизайн, ортопедия и протезирование, обратное проектирование и прототипирование, контроль/проверка качества и документирование исторических артефактов.
В дополнительном варианте осуществления сканирующее устройство содержит интерфейс для передачи упомянутых трехмерных данных в блок хранения данных. В одном варианте осуществления блок хранения данных расположен непосредственно рядом со сканирующим устройством и даже может быть встроен в сканирующее устройство. В другом варианте осуществления блок хранения данных расположен удаленно, например, на производственном участке, где трехмерные данные используются для изготовления изделия.
Например, объект может представлять собой лицо человека. Трехмерные данные человеческого лица, например, могут использоваться для изготовления индивидуальной маски для человека, например интерфейса пациента для медицинского лечение, или любого другого типа масок для иных приложений, например при создании кинофильмов.
В предпочтительном варианте осуществления способа по изобретению статичная главная структура проецируется на объект, при этом этапы обеспечения индикации и изменения положения и/или ориентации содержат этапы корректировки установочного изображения путем совмещения захваченного выдаваемого камерой прямого изображения и статичной главной структуры, проецирования скорректированного установочного изображения на объект и изменения положения и/или ориентации сканирующего устройства так, чтобы статичная главная структура и производная структура по существу совпадали в скорректированном установочном изображении. Данный вариант осуществления создает интуитивно-понятный подход для правильного расположения сканирующего устройства относительно объекта, а потому не требует специальной подготовки персонала, использующего сканер.
В другом варианте осуществления способ дополнительно содержит установку сканирующего устройства таким образом, что центр главной структуры направлен на центр объекта. Центр главной структуры, например, может представлять собой круг базовой структуры. Центр этого круга далее может располагаться так, чтобы быть направленным на центр объекта, например, нос сканируемого человека. Это способствует точной настройке расстояния сканирования и угла сканирования.
В другом варианте осуществления способ дополнительно содержит установку сканирующего устройства таким образом, что вертикальная ось симметрии главной структуры совпадает с вертикальной осью симметрии объекта. Вертикальная ось симметрии объекта, например, может представлять вертикальную центровую линию человеческого лица, содержащую переносицу. Данная структура помогает пользователю в процессе регулировки положения и облегчает правильное позиционирование сканирующего устройства.
В еще одном аспекте настоящего изобретения проекционный блок сканирующего устройства выполнен с возможностью проецирования главной структуры, содержащей маркерную структуру, при этом блок установки содержит вычислительный блок для определения величины глубины спроецированной маркерной структуры на основании захваченного выдаваемого камерой прямого изображения, при этом величина глубины представляет расстояние между положением спроецированной маркерной структуры и сканирующим устройством, и для вычисления погрешности установки сканирующего устройства на основании найденной величины глубины, при этом погрешность установки представляет отклонение фактической установки сканирующего устройства от правильного положения и/или правильной ориентации сканирующего устройства, при этом индикация правильного положения и/или правильной ориентации сканирующего устройства основана на погрешности установки. В данном варианте осуществления сканирующее устройство выполнено с возможностью непрерывного обеспечения обратной связи по погрешности установки. Это позволяет достичь очень быстрой и точной установке сканирующего устройства относительно объекта.
В дополнительном варианте осуществления сканирующего устройства блок установки содержит блок обнаружения для определения положения спроецированной маркерной структуры. С помощью блока обнаружения маркерная структура может быть идентифицирована очень быстро. В результате нахождение погрешности установки и индикация соответственно могут проводиться без какой-либо существенной задержки. Это, в свою очередь, приводит к быстрой и удобной установке сканирующего устройства.
В другом варианте осуществления сканирующего устройства блок установки содержит блок представления для представления индикации правильного положения и/или правильной ориентации сканирующего устройства оператору сканирующего устройства. С помощью непосредственной обратной связи, обеспечиваемой сканирующим устройством, пользователь, например специалист по сну, может сразу же отреагировать на позиционное несовпадение сканирующего устройства. Это обеспечивает правильную установку сканера, а значит, приводит к точному сканированию, например, человеческого лица.
В дополнительном варианте осуществления сканирующего устройства блок представления выполнен с возможностью представления индикации правильного положения и/или правильной ориентации сканирующего устройства, которая содержит величину и/или направление погрешности установки. В данном варианте осуществления пользователь сканирующего устройства получает точную информацию о направлении и величине погрешности установки. Поскольку пользователь сканирующего устройства точно знает, как переместить и/или повернуть сканер относительно объекта, процесс регулировки положения может быть ускорен.
В другом варианте осуществления сканирующего устройства блок представления содержит блок наложения для корректировки установочного изображения путем наложения главной структуры и изображения, содержащего индикацию правильного положения и/или правильной ориентации сканирующего устройства. Визуализация обеспечивает весьма интуитивно-понятный подход для индикации погрешности установки. Таким образом, погрешность установки можно спроецировать, например, на область лба на человеческом лице. Это означает, что обратная связь в отношении правильного положения и/или правильной ориентации сканирующего устройства обеспечивается непосредственно в поле обзора пользователя, работающего со сканирующим устройством. Это делает процесс регулировки положения более удобным и простым для пользователя. Кроме того, для отображения погрешности установки не требуется дополнительного аппаратного обеспечения.
В дополнительном варианте осуществления сканирующего устройства блок представления содержит блок визуального отображения для отображения изображения, содержащего индикацию правильного положения и/или правильной ориентации сканирующего устройства. В данном варианте осуществления для обеспечения информации о погрешности установки используется отдельный блок. Этот внешний блок отображения может располагаться на любом расстоянии от пользователя, работающего со сканирующим устройством. Кроме того, информация может выдаваться в любом формате и, например, может изменяться в масштабе в соответствии с потребностью оператора. Помимо этого, на блок визуального отображения может выводиться дополнительный текст, подсказывающий пользователю, как следует переместить и/или повернуть сканирующее устройство относительно объекта.
Согласно другому варианту осуществления сканирующего устройства блок представления содержит акустический блок для звукового сообщения информации, содержащей индикацию правильного положения и/или правильной ориентации сканирующего устройства. Акустический блок может содержать, например, громкоговоритель для звукового сообщения информация, чтобы инструктировать оператора сканирующего устройства в процессе регулировки положения. Эта звуковая информация может обеспечиваться в качестве альтернативы или дополнительно к визуальному представлению погрешности установки.
В другом варианте осуществления сканирующего устройства проекционный блок выполнен с возможностью проецирования маркерной структуры, содержащей структуру с пространственным и/или временным кодированием. Такая кодированная структура облегчает обнаружение спроецированной маркерной структуры, тем самым ускоряя процесс регулировки положения.
Согласно другому варианту осуществления сканирующего устройства проекционный блок выполнен с возможностью проецирования главной структуры, содержащей структуру статичного элемента. Структура статичного элемента может содержать, например, два круга и/или перекрестье, которые должны быть совмещены с глазами и/или кончиком носа человеческого лица в начале процесса регулировки положения. Применение структуры статичного элемента обеспечивает грубую начальную установку сканирующего устройства. Следовательно, индикация погрешности установки требуется только для точной настройки положения и/или ориентации сканирующего устройства. В результате процесс регулировки положения может быть ускорен.
Согласно еще одному аспекту способа по изобретению главная структура, содержащая маркерную структуру, проецируется на объект, при этом этап обеспечения индикации содержит определение величины глубины спроецированной маркерной структуры на основании захваченного выдаваемого камерой прямого изображения, при этом величина глубины представляет расстояние между положением спроецированной маркерной структуры и сканирующим устройством, вычисление погрешности установки сканирующего устройства на основании найденной величины глубины, при этом погрешность установки представляет отклонение фактической установки сканирующего устройства от правильного положения и/или правильной ориентации сканирующего устройства, и обеспечение индикации правильного положения и/или правильной ориентации сканирующего устройства на основании погрешности установки. Предложенный способ совершенствует процедуры установки путем непрерывного обеспечения непосредственной обратной связи по погрешности установки оператору сканирующего устройства. Эта обратная связь может добавляться к спроецированной структуре или обеспечиваться иным способом, например на отдельном экране или с помощью акустического блока. При помощи представленной погрешности установки оператор сканирующего устройства интуитивно ориентируется в процессе регулировки положения. В результате сканер можно очень быстро и точно навести на объект.
Согласно другому варианту осуществления способ дополнительно содержит определение положения спроецированной маркерной структуры до определения величины глубины. Сначала следует идентифицировать спроецированную маркерную структуру в захваченном выдаваемом камерой прямом изображении. Как только положение этого маркера определено, величина глубины данного маркера непрерывно оценивается посредством 3D сканера. На основании оценки глубины осуществляется вычисление погрешности установки сканирующего устройства и сообщается оператору сканера. Предпочтительно главная структура содержит множество маркерных структур, проецируемых на объект. Это облегчает вычисление погрешности установки.
Следует понимать, что заявленный способ имеет схожие и/или идентичные предпочтительные варианты осуществления, что и заявленное устройство, которые определены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Эти и другие аспекты изобретения станут очевидны из вариантов осуществления, описанных ниже. На чертежах:
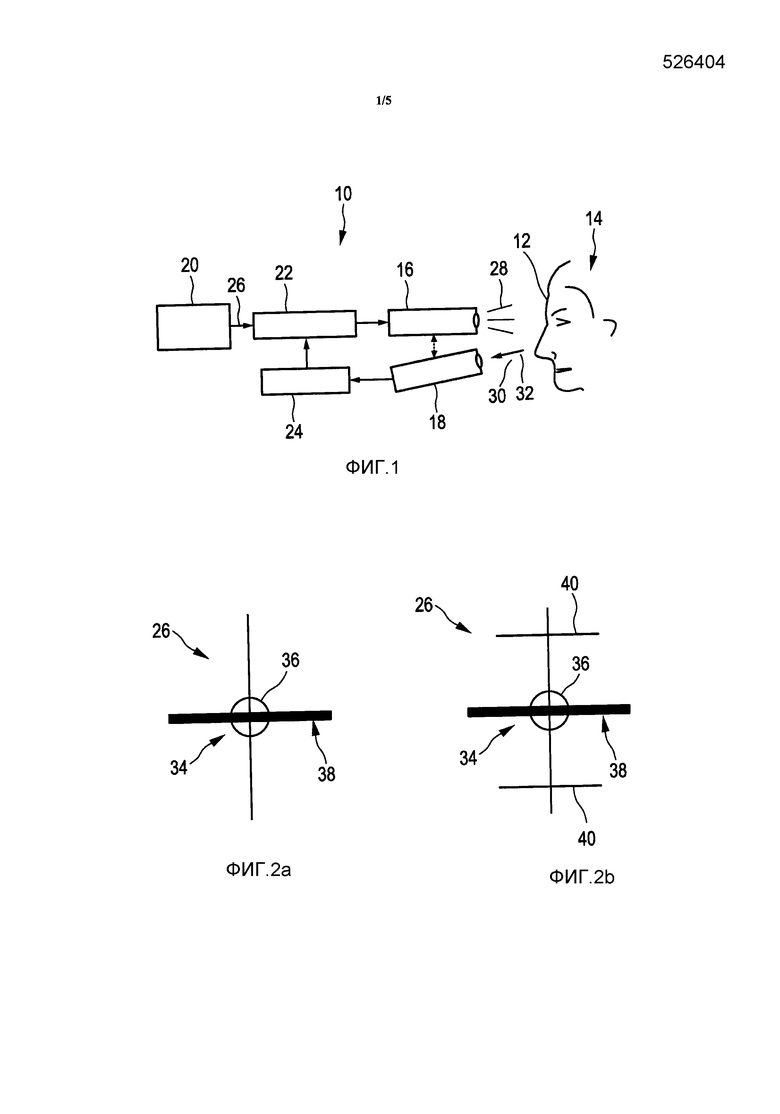
на Фиг. 1 показан предпочтительный вариант осуществления сканирующего устройства для сканирования объекта;
на Фиг. 2 показаны другие варианты осуществления статичной главной структуры, содержащейся в установочном изображении, которая проецируется на объект сканирующим устройством;
на Фиг. 3-6 показаны различные установочные изображения для различных несовпадений сканирующего устройства;
на Фиг. 7 показана схема, иллюстрирующая один предпочтительный вариант осуществления способа позиционирования сканирующего устройства относительно объекта;
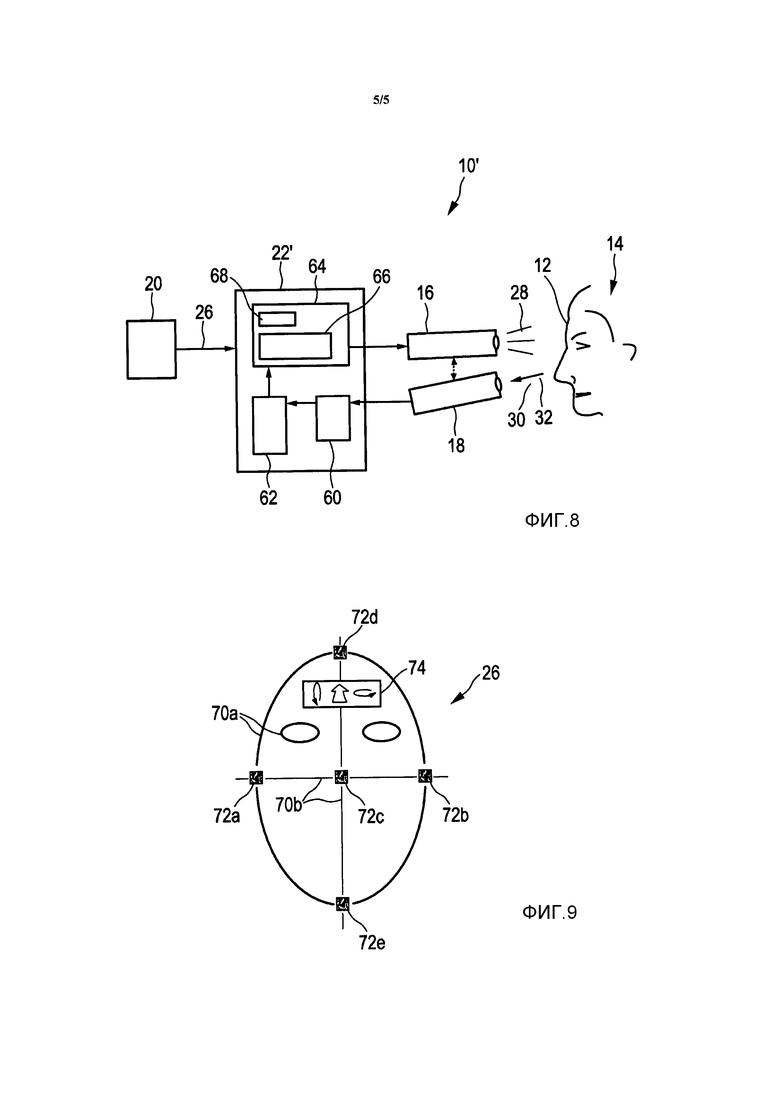
на Фиг. 8 показан другой предпочтительный вариант осуществления сканирующего устройства для сканирования объекта согласно дополнительному аспекту настоящего изобретения;
на Фиг. 9 показана примерная главная структура, включающая в себя индикацию правильного положения и/или правильной ориентации сканирующего устройства, согласно дополнительному аспекту настоящего изобретения.
Осуществление изобретения
На Фиг. 1 показано сканирующее устройство 10 для сканирования, например, лица 12 человека 14. В данном варианте осуществления, приведенном в качестве примера, сканирующее устройство 10 представляет собой ручной 3D сканер, выполненный с возможностью сканирования поверхности лица 12 для создания 3D изображения лица 12. 3D изображение, например, может использоваться для изготовления лицевых масок, применяемых в ходе проведения медицинских процедур. Для получения данного 3D изображения сканер 10 должен измерить расстояние между сканером 10 и поверхностью лица 12. Обычно это выполняется с использованием известных триангуляционных подходов.
Сканер 10 содержит проекционный блок 16 и блок 18 захвата изображения и основан на принципе использования структурированного света. Проекционный блок 16, например, представляет собой LCD/DMD проектор 16. Блок 18 захвата изображения представляет собой камеру 18, обычно с зарядовой связью, или CMOS-устройство. Ручной 3D сканер 10 структурированного света проецирует структуру светового излучения на лицо 12 посредством проектора 16. Для создания 3D изображения лица 12 сканер 10 оценивает деформацию упомянутой структуры, зарегистрированную посредством камеры 18. Как можно видеть на Фиг. 1, камера 18 незначительно смещена от проектора 16 структуры. Поскольку камера 18 направлена на спроецированную структуру под иным углом, чем проектор 16, упомянутая структура появляется в различных местах в поле обзора камеры 18 в зависимости от расстояния между сканером 10 и точкой поверхности лица 12. Данная технология называется триангуляцией. Вычислив расстояние между сканером 10 и каждой точкой поверхности лица 12, можно построить 3D изображение лица 12.
Из описанного подхода становится очевидным, что правильное расположение сканера 10 относительно лица 12 является принципиально важным. Для сбора точных сканированных изображений сканер 10 должно располагаться на определенном расстоянии от лица 12 и под определенным углом к нему. Для поддержки данной процедуры установки сканер 10 содержит генератор 20 структур, блок 22 совмещения и блок 24 обработки данных. Генератор 20 структур формирует статичную главную структуру 26, поступающую в проектор 16 через блок 22 совмещения. Проекционный блок 16 проецирует установочное изображение 28, содержащее упомянутую статичную главную структуру 26, на лицо 12. Затем камера 18 захватывает выдаваемое камерой прямое изображение 30 лица 12, при этом выдаваемое камерой прямое изображение 30 содержит спроецированное установочное изображение 28 на виде с точки обзора камеры 18. В результате выдаваемое камерой прямое изображение 30 содержит производную структуру 32, представляющую собой структуру, полученную из статичной главной структуры 26.
Захваченное выдаваемое камерой прямое изображение 30 далее поступает в блок 24 обработки данных, который, например, изменяет масштаб выдаваемого камерой прямого изображения 30 для повышения чувствительности визуальной обратной связи. На следующем этапе обработанное выдаваемое камерой прямое изображение 30 поступает в блок 22 совмещения. Блок 22 совмещения формирует скорректированное установочное изображение 28 путем совмещения обработанного выдаваемого камерой прямого изображения 30 и статичной главной структуры 26. Данное скорректированное установочное изображение 28 снова проецируется на лицо 12 посредством проектора 16. В результате совмещения, выполненного блоком 22 совмещения, скорректированное установочное изображение 28 содержит статичную главную структуру 26 и производную структуру 32. При необходимости блок 22 совмещения может использовать разные уровни яркости и/или цвета для статичной главной структуры 26 и производной структуры 32. Таким образом, пользователь может легко различить упомянутые структуры 26, 32 в спроецированном установочном изображении 28. Предпочтительно производная структура 32 имеет меньшую яркость в скорректированном установочном изображении 28, так что пользователь интуитивно распознает статичную главную структуру 26 и производную структуру 32.
В предпочтительном варианте осуществления сканера 10 последовательность проецирования установочного изображения 28, захвата выдаваемого камерой прямого изображения 30, формирования скорректированного установочного изображения 28 путем совмещения захваченного выдаваемого камерой прямого изображения 30 и статичной главной структуры 26 и повторного проецирования скорректированного установочного изображения 28 непрерывно повторяется. Это обеспечивает точную установку сканера 10 относительно лица 12.
На Фиг. 2a показан пример осуществления статичной главной структуры 26, содержащей базовую структуру 34. Базовая структура 34 образована кругом 36 и структурой-перекрестьем 38. Предпочтительно пользователь устанавливает сканер 10 таким образом, что центр круга 36 направлен на центр лица 12 (например, нос сканируемого человека 14). Кроме того, пользователь устанавливает сканер 10 по вертикали так, чтобы вертикальная ось симметрии структуры-перекрестья 38 совпадала с вертикальной осью симметрии лица 12 (например, центровой линией лица 12, содержащей переносицу человека 14). Как станет ясно из последующих примеров, статичная главная структура 26, представленная на Фиг. 2a, способствует правильной установке сканера 10 в отношении расстояния между сканером 10 и лицом 12. Однако статичная главная структура 26, представленная на Фиг. 2a, не пригодна для калибровки ориентационного положения сканера 10 относительно лица 12.
На Фиг. 2b показана статичная главная структура 26, содержащая базовую структуру 34 и дополнительную структуру 40, позволяющую отрегулировать угол в вертикальной плоскости сканера 10 относительно лица 12. В этом примере предполагается, что проектор 16 и камера 18 расположены друг над другом в вертикальном направлении. Угол в вертикальной плоскости сканера 10 может устанавливаться путем контролирования нижней и верхней частей дополнительной структуры 40.
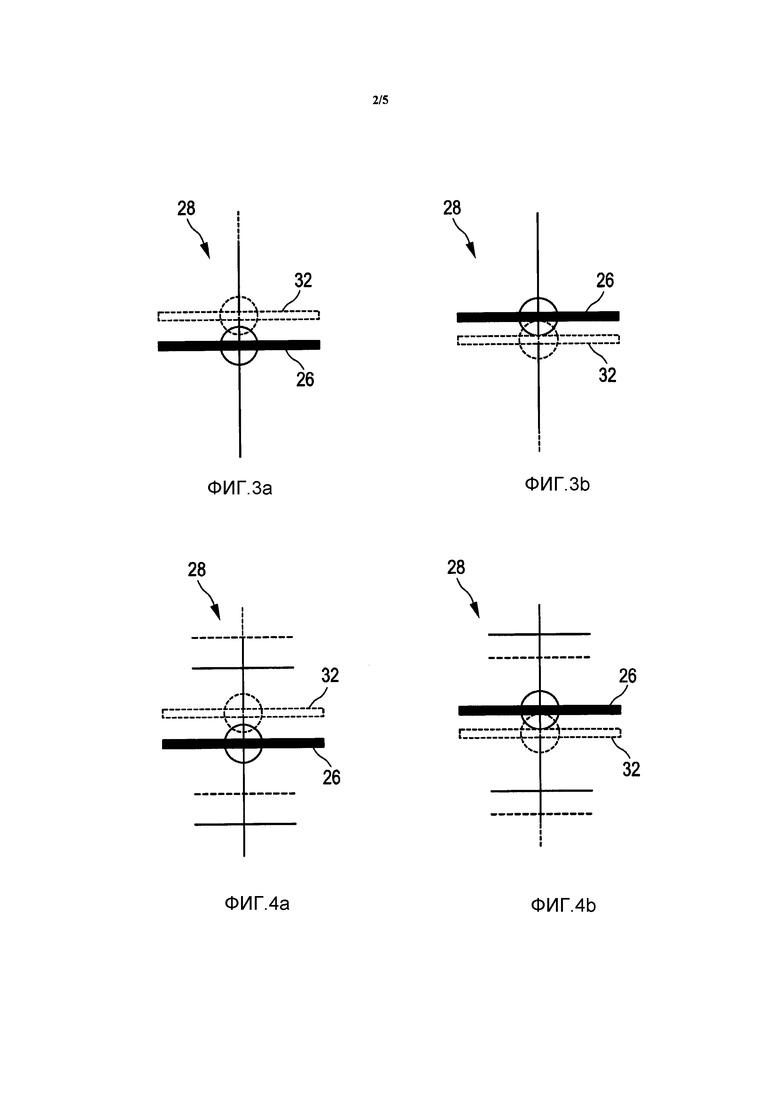
На Фиг. 3 - 6 показаны различные установочные изображения 28 для различных несовпадений сканера 10 в отношении лица 12. Для всех последующих установочных изображений 28 предполагается, что проектор 16 расположен вертикально над камерой 18. В общем, сканер 10 правильно расположен и/или сориентирован относительно лица 12, если статичная главная структура 26 и производная структура 32 по существу совпадают в скорректированном установочном изображении 28, спроецированном на лицо 12. Если упомянутые две структуры 26, 32 не совпадают в установочном изображении 28, пользователь должен регулировать расстояние сканирования и/или угол сканера 10 относительно лица 12, пока главная структура 26 и производная структура 32 практически не совпадут. С помощью Фиг. 3-6 поясняется, как пользователь должен интерпретировать наблюдаемые структуры 26, 32 установочного изображения 28.
На Фиг. 3-5 статичная главная структура 26 показана сплошными линиями, в то время как производная структура 32 показана пунктирными линиями.
На Фиг. 3 показан пример установочного изображения 28, где сканер 10 расположен слишком близко к лицу 12. Следовательно, пользователь должен переместить сканер 10 дальше от него, чтобы правильно установить расстояние сканера 10.
На Фиг. 3b показан противоположный пример, где сканер 10 расположен слишком далеко от лица 12. В результате сканер 10 должен быть перемещен ближе к лицу 12.
На Фиг. 4 и 5 показаны различные установочные изображения 28, при этом статичная главная структура 26 содержит базовую структуру 34 и дополнительную структуру 40, которая дополнительно способствует отслеживанию правильной ориентации сканера 10.
На Фиг. 4a сканер 10 расположен слишком близко к лицу 12, так что его требуется отодвинуть дальше. На Фиг. 4b показан противоположный пример по отношению к тому, что показан на Фиг. 4a. Таким образом, сканер 10 расположен слишком далеко от лица 12. Следовательно, сканер 10 требуется переместить ближе к лицу 12.
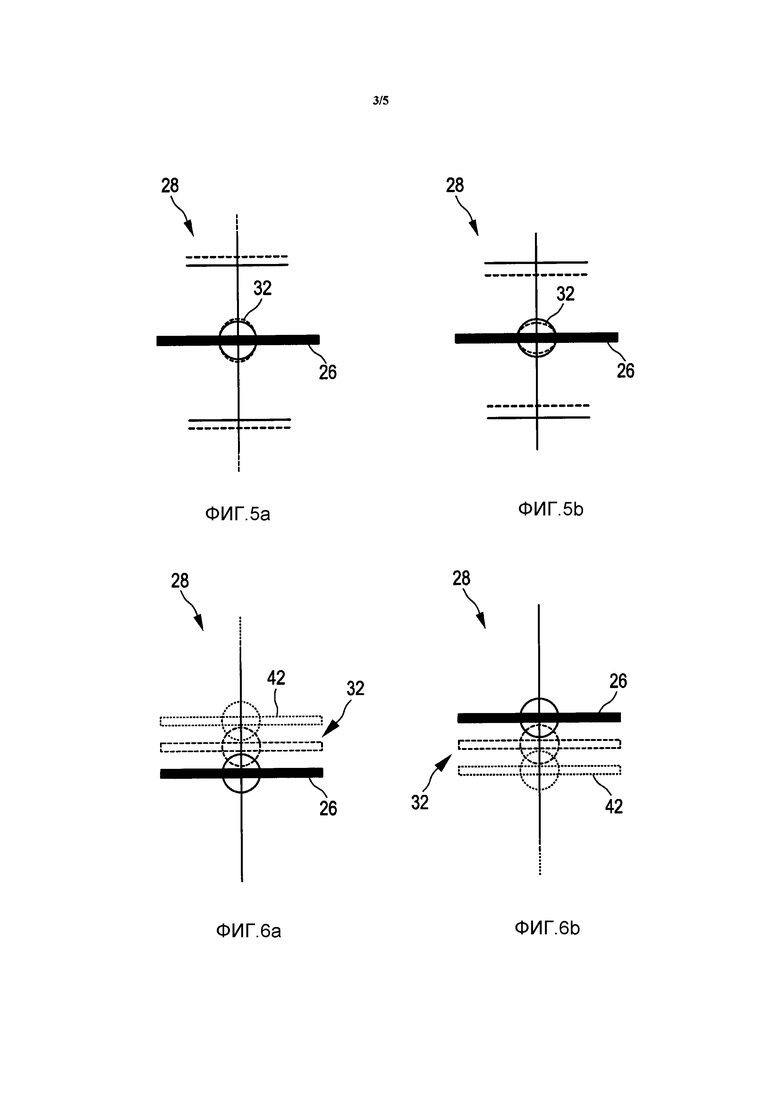
На Фиг. 5 показаны два примера, когда сканирующее устройство 10 не совпадает с лицом 12 в отношении ориентации (угла) между сканером 10 и лицом 12. На Фиг. 5a камера 18 находится ближе к лицу 12, чем проектор 16. Это означает, что сканер 10 направлен вверх относительно лица 12. Следовательно, пользователь должен повернуть сканер 10 вниз. В примере, представленном на Фиг. 5b, камера 18 находится дальше от лица 12, чем проектор 16. Поскольку сканер 10 по существу направлен вниз, пользователь должен повернуть его вверх.
Данная процедура установки предполагает, что сканер 10 предварительно установлен правильно в том смысле, что главная структура 26 и производная структура 32 по существу совпадают, если установлены правильное положение и/или правильная ориентация сканирующего устройства 10 относительно сканируемого объекта 12. Предварительная настройка, например, может выполняться путем надлежащей установки сканера 10 относительно калибровочного объекта 12, когда правильное положение и/или правильная ориентация сканирующего устройства 10 уже известны заранее. Если статичная главная структура 26 и производная структура 32 не совпадают в установочном изображении 28 для должным образом установленного сканирующего устройства 10, блок 24 обработки данных может быть выполнен с возможностью поиска такого преобразования изображения, чтобы главная структура 26 и производная структура 32 совпали в установочном изображении 28. В частности, блок 24 обработки данных может (линейно) трансформировать захваченное выдаваемое камерой прямое изображение 30, пока не будет обеспечено точное наложение главной структуры 26 и производной структуры 32. Посредством такой предварительной установки сканера 10 можно достичь точной установки сканера 10 относительно лица 12.
Вследствие наличия замкнутого контура, состоящего из проектора 16, камеры 18, блока 24 обработки данных и блока 22 совмещения (см. также Фиг. 1), установочное изображение 28 может содержать много ложных структур 42. На Фиг. 1 для краткости показана только одна ложная структура 42 (см. точечную линию на Фиг. 6).
Хотя ложные структуры 42 могут не восприниматься в качестве помехи и даже могут помогать пользователю в процессе точной настройки сканера 10 (поскольку все ложные структуры 42 отклоняются в одном направлении по отношению к главной структуре 26), их можно эффективно подавить или даже избежать в установочном изображении 28. Существует несколько возможностей подавления или даже недопущения ложных структур 42.
В одном варианте осуществления выдаваемое камерой прямое изображение 30 имеет повышенный контраст для выделения наблюдаемой производной структуры 32 (которая может иметь несколько ложных структур 42) из фона и уменьшения появления посторонних изображений текстуры. Кроме того, яркость выдаваемого камерой прямого изображения 30 нормализуется так, чтобы она была на заданную долю ниже яркости главной структуры 26. Эти этапы также снижают появление ложных изображений.
В альтернативном варианте осуществления камера 18 синхронизирована с проектором 16 так, что камера 18 осуществляет сбор только тех выдаваемых камерой прямых изображений 30, которые содержат главную структуру 26. В результате проектор 16 проецирует установочное изображение 28, содержащее только главную структуру 26 и производную структуру 32, которая, в свою очередь, содержит только главную структуру 26 на виде с позиции камеры 18. В ходе процедуры синхронизации между проектором 16 и камерой 18, форма главной структуры 26 может поступать в камеру 18. Это позволяет камере 18 автоматически распознавать и захватывать только главную структуру 26.
В дополнительном варианте осуществления в качестве камеры 18 и проектора 16 используются цветная камера и цветной проектор. Следовательно, можно проецировать и получать главную структуру 26 и наблюдаемую производную структуру 32, используя разные каналы цветности. В частности, проектор 16 может использовать первый канал цветности для главной структуры 26 и второй канал цветности для производной структуры 32 при проецировании изображения 28 в скорректированной конфигурации на лицо 12. Если камера 18 использует, например, первый канал цветности для захвата выдаваемого камерой прямого изображения 30, выдаваемое камерой прямое изображение 30 содержит только главную структуру 26 на виде с позиции камеры. В результате ложных структур 42 можно эффективно избежать.
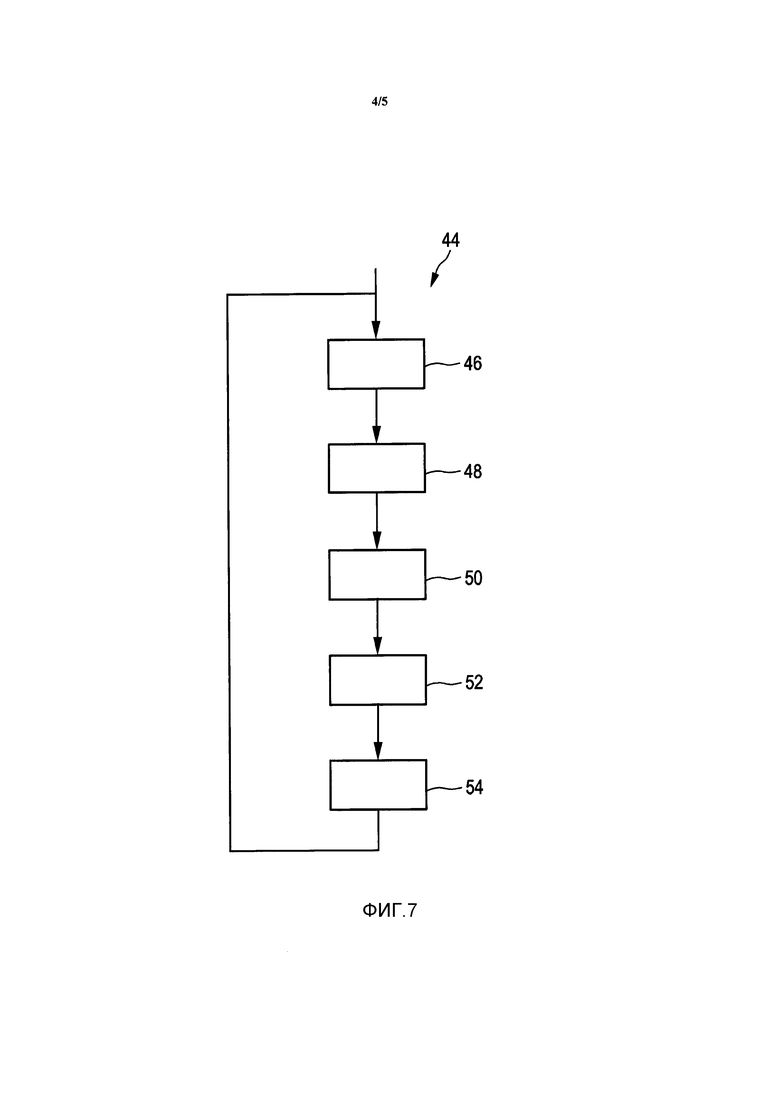
На Фиг. 7 показана схема, иллюстрирующая один предпочтительный вариант осуществления способа 44 позиционирования сканирующего устройства 10 относительно объекта 12.
На первом этапе 46 установочное изображение 28 проецируется на объект 12, при этом установочное изображение 28 содержит статичную главную структуру 26.
На этапе 48 сканирующее устройство 10 устанавливается относительно объекта 12. Процесс регулировки положения содержит позиционирование сканирующего устройства 10 так, чтобы центр главной структуры 26 был направлен на центр объекта 12. Кроме того, сканирующее устройство 10 должно располагаться так, чтобы вертикальная ось симметрии главной структуры 26 совпадала с вертикальной осью симметрии объекта 12.
На этапе 50 осуществляется захват выдаваемого камерой прямого изображения 30 объекта 12, при этом упомянутое выдаваемое камерой прямое изображение 30 содержит спроецированное установочное изображение 28 на виде из точки захвата изображения. Следовательно, выдаваемое камерой прямое изображение 30 содержит производную структуру 32, которая, в свою очередь, состоит из статичной главной структуры 26 на виде из точки захвата изображения.
На этапе 52 выполняется обработка выдаваемого камерой прямого изображения 30. В одном примере осуществления выдаваемое камерой прямое изображение 30, например, может изменяться в масштабе для согласования формата камеры 18 и проектора 16. В другом варианте осуществления коэффициент масштабирования может быть дополнительно увеличен для повышения чувствительности визуальной обратной связи и уменьшения появления посторонних изображений текстуры.
На этапе 54 установочное изображение 28 корректируется путем совмещения захваченного выдаваемого камерой прямого изображения 30 и статичной главной структуры 26При необходимости к выдаваемому камерой прямому изображению 30 и статичной главной структуре 26 могут применяться неодинаковая яркость и/или разные цвета. Это облегчает установление различий между производной структурой 32 и статичной главной структурой 26 в установочном изображении 28.
На следующем этапе скорректированное установочное изображение 28 проецируется на объект 12, тем самым снова возвращаясь к этапу 46.
Если статичная главная структура 26 и производная структура 32 не совпадают в скорректированном установочном изображении 28, пользователь снова должен отрегулировать положение сканера 10 относительно объекта 12 на следующем этапе 48 итерационного процесса. Таким образом, этап 48 установки также может содержать изменение положения и/или ориентации сканирующего устройства 10 относительно сканируемого объекта 12.
Этапы 46 - 54 повторяются, пока статичная главная структура 26 и производная структура 32 по существу не совпадут в скорректированном установочном изображении 28. Если это состояние достигается, сканер 10 правильно установлен относительно объекта 12. В результате могут быть получены точные сканы объекта 12. Кроме того, подтверждается, что сканируемый объект находится в рабочем диапазоне сканера.
Подводя итог вышесказанному, на Фиг. 1-7 описано сканирующее устройство 10 для сканирования объекта 12, при этом сканирующее устройство 10 содержит проекционный блок 16 для проецирования установочного изображения 28 на объект 12, при этом упомянутое установочное изображение 28 содержит статичная главная структура 26, блок 18 захвата изображения для захвата выдаваемого камерой прямого изображения 30 объекта 12, при этом упомянутое выдаваемое камерой прямое изображение 30 содержит производную структуру 32 статичной главной структуры 26, при этом производная структура 32 представляет упомянутое спроецированное установочное изображение 28 на виде с позиции блока 18 захвата изображения и блок 22 совмещения для корректировки установочного изображения 28 путем совмещения захваченного выдаваемого камерой прямого изображения 30 и статичной главной структуры 26, при этом скорректированное установочное изображение 28 указывает правильное положение и/или правильную ориентацию сканирующего устройства 10 относительно сканируемого объекта 12, если статичная главная структура 26 и производная структура 32 по существу совпадают в скорректированном установочном изображении 28.
Кроме того, Фиг. 1-7 относятся к способу позиционирования сканирующего устройства 10 относительно сканируемого объекта 12, при этом способ содержит проецирование установочного изображения 28 на объект 12, при этом упомянутое установочное изображение 28 содержит статичную главную структуру 26, захват выдаваемого камерой прямого изображения 30 объекта 12, при этом упомянутое выдаваемое камерой прямое изображение 30 содержит производную структуру 32 статичной главной структуры 26, при этом производная структура 32 представляет упомянутое спроецированное установочное изображение 28 на виде из точки захвата изображения, корректировку установочного изображения 28 путем совмещения захваченного выдаваемого камерой прямого изображения 30 и статичной главной структуры 26, проецирование скорректированного установочного изображения 28 на объект 12 и изменение положения и/или ориентации сканирующего устройства 10 так, чтобы статичная главная структура 26 и производная структура 32 по существу совпали в скорректированном установочном изображении 28 при повторении предыдущих этапов.
Согласно дополнительному аспекту настоящего изобретения на Фиг. 8 показан другой вариант осуществления сканирующего устройства 10' для сканирования объекта 12. Сканирующее устройство 10' в общем соответствует варианту осуществления сканирующего устройства 10, показанного на Фиг. 1. Соответствующим блокам/элементам, таким образом, присвоены те же ссылочные позиции. Далее будут поясняться только отличия.
Как показано на Фиг. 8, сканирующее устройство 10' содержит блок 22' установки, соединенный с генератором 20 структур, проекционным блоком 16 и камерой 18. Блок 22' установки содержит блок 60 обнаружения, вычислительный блок 62 и блок 64 представления. В проиллюстрированном примере осуществления сканирующего устройства 10' блок 64 представления содержит блок 66 наложения и акустический блок 68. В альтернативном варианте осуществления блок 64 представления может содержать либо блок 66 наложения, либо акустический блок 68. В еще одном альтернативном варианте осуществления сканирующего устройства 10' блок 64 представления может также располагаться за пределами сканирующего устройства 10' и может содержать, например, внешний блок визуального отображения, такой как планшетный ПК, соединенный с вычислительным блоком 62 посредством беспроводной связи.
Ниже функционирование построечного блока 22' будет поясняться в сочетании с Фиг. 8 и 9. В данном варианте осуществления сканирующего устройства 10' генератор 20 структур формирует главную структуру 26, содержащую структуру 70 статических элементов и множество маркерных структур 72. Главная структура 26 поступает в блок 22' установки, который направляет далее главную структуру 26 в проекционный блок 16. Как и в варианте осуществления, показанном на Фиг. 1, проекционный блок 16 проецирует установочное изображение 28 на человеческое лицо 12, при этом установочное изображение 28 содержит главную структуру 26. Структура 70 статических элементов может содержать структуры 70a эллиптической формы, которые могут совмещаться соответственно с глазами и лицом 12 человека 14. Кроме того, структура 70 статических элементов может содержать перекрестье 70b, которое требуется навести на кончик носа человека 14 в процессе регулировки положения сканирующего устройства 10'. Путем наведения структуры 70 статических элементов на различные черты лица человека 14 выполняется грубая начальная установка сканирующего устройства 10'. В результате установка сканера 10' ускоряется.
Следующие этапы процедуры установки обеспечивают точную настройку положения и/или ориентации сканирующего устройства 10'. В примере осуществления главной структуры 26, представленном на Фиг. 9, маркерные структуры 72 содержат структуру с пространственным кодированием, в частности AR-ярлык (ярлык дополненной реальности), содержащий 2D бинарный код. В качестве альтернативы могут использоваться другие типы кодов, например структура с временным кодированием (например, временные чередующиеся блоки). В дополнительном альтернативном варианте осуществления главной структуры 26 в качестве маркерных структур 72 используются структуры с пространственным и временным кодированием. Структуры с пространственным и/или временным кодированием применяются для обеспечения легкого распознавания маркерных структур 72 на последующем этапе процедуры установки.
Как и в варианте осуществления сканирующего устройства 10, камера 18 захватывает выдаваемое камерой прямое изображение 30, содержащее производную структуру 32 главной структуры 26. Поскольку производная структура 32 представляет спроецированное установочное изображение 28 на виде из точки обзора камеры, производная структура 32 содержит также структуры, полученные из структуры 70 статических элементов и маркерных структур 72. Захваченное выдаваемое камерой прямое изображение 30 далее направляется в блок 60 обнаружения. Блок 60 обнаружения используется для определения точных положений маркерных структур 72. Поиск маркерных структур 72 облегчается благодаря тому, что примерное положение маркерных структур 72 известно априори. Следовательно, точное положение маркерных структур 72 можно быстро найти, например, путем установления корреляции со «скользящим» окном в поисковом окне при использовании структуры с пространственным кодированием в качестве маркерной структуры 72. Аналогичным образом может применяться временной фильтр при использовании структур с временным кодированием в качестве маркерных структур 72. После того как точные положения маркерных структур 72 определены/оценены, данная информация о положении передается в вычислительный блок 62.
Найденные положения маркерных структур 72 непосредственно переводятся в соответствующие величины глубин. Такое преобразование может выполняться, например, путем применения справочной таблицы. Из оценок глубин (связанных с положениями маркерных структур 72) можно построить модель, позволяющую сделать заключение о положении и/или ориентации лица 12 относительно сканирующее устройство 10'. Простая модель, например, оценивает ориентацию вдоль вертикальной оси лица 12 путем определения характера изменения величин глубин маркерных структур 72a, 72c и 72b, представленных на Фиг. 9. Аналогичным образом ориентация вдоль горизонтальной оси лица 12 определяется из характера изменения величин глубин маркерных структур 72d, 72c и 72e. Правильное расстояние между сканирующим устройством 10' и лицом 12 получают либо из величины глубины средней маркерной структуры 72c, либо из среднего значения всех величин глубин, относящихся к маркерным структурам 72a-72e. Таким образом, погрешность установки сканирующего устройства 10' относительно лица 12 может вычисляться из оценок глубин, относящихся к маркерным структурам 72. Эта погрешность установки направляется в блок 64 представления.
Блок 64 представления отвечает за представление индикации 74 правильного положения и/или правильной ориентации сканирующего устройства 10' оператору сканирующего устройства 10', при этом индикацию 74 получают из погрешности установки. Индикация 74 может обеспечиваться оператору визуально и/или акустически. В варианте осуществления, проиллюстрированном на Фиг. 8, погрешность установки направляется в блок 66 наложения и в акустический блок 68. Блок 66 наложения корректирует установочное изображение 28 путем совмещения главной структуры 26 и изображения, содержащей индикацию 74, что представляет визуализацию погрешности установки. В отношении примера, представленного на Фиг. 9, индикация 74 может содержать две стрелки (см. левую и правую стрелки блока индикации 74 на Фиг. 9), которые указывают, как следует повернуть сканирующее устройство 10' относительно лица 12 и может содержать одну дополнительную стрелку (см. стрелку в середине блока индикации 74 на Фиг.9), дающую подсказки пользователю в отношении правильного расстояния между сканирующим устройством 10' и человеческим лицом 12. Для визуализации текущей погрешности установки индикация 74 проецируется на лицо 12, предпочтительно в лобную часть лица 12, поскольку лобная часть обычно является относительно плоской.
В качестве альтернативы или дополнительно к трем стрелкам, показанным в блоке индикации 74, индикация 74 может содержать шкалы ошибок, визуализирующие величину погрешности установки. Кроме того, в качестве части индикации 74 также может быть визуализирован «универсальный шарнир».
Акустический блок 68 обрабатывает погрешность установки для акустического воспроизведения и направляет эту обработанную информацию в громкоговоритель. Обработанная информация может содержать звуковую индикацию 74, такую как команды «повернуть влево», «повернуть вправо», «придвинуть ближе» и/или «отодвинуть дальше».
Сканирующее устройство 10' способно непрерывно измерять величины глубин маркерных структур 72 и обеспечивать оператору сканирующего устройства 10' непрерывную обратную связь по текущей погрешности установки. Погрешность установки визуально и/или акустически передается оператору сканера. Индикация 74 на основании погрешности установки обеспечивает возможность интуитивного манипулирования сканирующим устройством 10' в процессе установки. Кроме того, выданная индикация 74 приводит к весьма быстрой и точной установке сканера 10' относительно объекта 12. Благодаря указанию величины и/или направления погрешности установки оператор сканера 10' получает подсказку, как требуется повернуть и/или переместить сканер 10', чтобы быстро уменьшить текущую погрешность установки.
Сканирующее устройство 10' также способствует легкому и удобному проведению калибровки сканирующего устройства 10', при этом определяется (нелинейное) преобразование «внутренних единиц» сканера в «реальные» координаты (например, в системе координат, в которой расположено сканирующее устройство 10'). Необходимое средство в таком процессе калибровки - соответствующий калибровочный шаблон. Калибровочный шаблон, например, может быть калибровочной таблицей, представляющей собой совершенно плоскую плиту, имеющую маркеры, расстояние между которыми известно. Для проведения калибровки сканирующее устройство 10' располагают на множестве различных расстояний и/или под множеством углов относительно калибровочной плиты, при этом сканирующее устройство 10' проецирует структуры на калибровочную плиту. Поскольку процедура калибровки обычно допускает определенную степень свободы в отношении позиционирования сканирующего устройства 10', достаточно расположить сканирующее устройство 10' на примерных расстояниях и/или под приблизительными углами. Такое позиционирование поддерживается сканирующим устройством 10' путем обеспечения индикации 74, указывающей правильное положение сканирующего устройства 10' относительно калибровочной плиты. Таким образом, предложенное сканирующее устройство 10' позволяет также неопытным пользователям выполнять калибровку сканера. Дополнительное специальное оборудование, такое как, например, портативный компьютер, не требуется.
В соответствии с дополнительным аспектом настоящего изобретения на Фиг. 8 и 9 раскрыто сканирующее устройство 10' для сканирования объекта 12, при этом сканирующее устройство 10' содержит проекционный блок 16 для проецирования установочного изображения 28 на объект 12, при этом упомянутое установочное изображение 28 содержит главную структуру 26, блок 18 захвата изображения для захвата выдаваемого камерой прямого изображения 30 объекта 12, при этом упомянутое выдаваемое камерой прямое изображение 30 содержит производную структуру 32 главной структуры 26, при этом производная структура 32 представляет упомянутое спроецированное установочное изображение 28 на виде с позиции блока 18 захвата изображения и установочный блок 22' для обеспечения индикации правильного положения и/или правильной ориентации сканирующего устройства 10' относительно сканируемого объекта 12 на основании захваченного выдаваемого камерой прямого изображения 30, при этом проекционный блок 16 выполнен с возможностью проецирования главной структуры 26, содержащего маркерную структуру 72, при этом блок 22' установки содержит вычислительный блок 62 для определения величины глубины спроецированной маркерной структуры 72 на основании захваченного выдаваемого камерой прямого изображения 30, при этом величина глубины представляет расстояние между положением спроецированной маркерной структуры 72 и сканирующим устройством 10' и для вычисления погрешности установки сканирующего устройства 10' на основании найденной величины глубины, при этом погрешность установки представляет отклонение фактической установки сканирующего устройства 10' от правильного положения и/или правильной ориентации сканирующего устройства 10', при этом индикация 74 правильного положения и/или правильной ориентации сканирующего устройства 10' основана на погрешности установки.
Представлен способ создания интерфейса пациента для человека, включающий в себя этапы приема трехмерных данных лица человека, полученных сканированием лица человека посредством сканирующего устройства, позиционированного относительно человека способом позиционирования сканирующего устройства, раскрытым в настоящем документе, или посредством сканирующего устройства, раскрытого в настоящем документе, или позиционирования сканирующего устройства относительно человека способом, раскрытым в настоящем документе, или посредством сканирующего устройства, раскрытого в настоящем документе, и сканирования лица человека посредством позиционированного сканирующего устройства, и использования полученных трехмерных данных лица человека для изготовления интерфейса пациента для человека или определения формы интерфейса пациента для человека и/или выбора интерфейса пациента, пригодного для человека, из заданного набора интерфейсов пациента.
Хотя изобретение проиллюстрировано на чертежах и подробно описано в вышеприведенном описании, такие иллюстрации и описание следует рассматривать как иллюстративные и приведенные в качестве примера, но не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления. Специалисты в данной области техники смогут предложить другие разновидности раскрытых вариантов осуществления, применяя на практике заявленное изобретение, изучив чертежи, раскрытие и прилагаемую формулу изобретения. В частности, раскрытые сканирующее устройство и способ могут также применяться в других прикладных областях, например, при создании кинофильмов и видеоигр, контроле качества, в обратном проектировании или прототипировании. В настоящей заявке термин «совпадает», в общем, следует понимать как «по существу совпадает». Производная структура в большинстве случаев содержит естественную деформацию относительно главной структуры, вызванную, например, отклонениями точных трехмерных геометрических параметров головы сканируемых субъектов от трехмерной формы калибровочного объекта.
В формуле изобретения термин «содержащий» не исключает наличия других элементов или этапов, а единственное число не исключает множества. Один элемент или другой блок может выполнять функции нескольких объектов, перечисленных в формуле изобретения. Тот факт, что определенные средства перечислены в различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих средств не может быть использовано с достижением преимущества.
Ни одну из ссылочных позиций в формуле изобретения не следует рассматривать как ограничивающую объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА С ПРОЕКТОРОМ ИЗОБРАЖЕНИЯ ДЛЯ КОМНАТЫ СКАНИРОВАНИЯ | 2011 |
|
RU2608229C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА ЗАХВАТА ОБЪЕКТА И ОТОБРАЖАЮЩЕЕ УСТРОЙСТВО И СВЯЗАННЫЙ СПОСОБ | 2008 |
|
RU2502136C2 |
| УСТРОЙСТВО И СПОСОБ ПРЕДСТАВЛЕНИЯ СТРУКТУРНОЙ ИНФОРМАЦИИ О ТЕХНИЧЕСКОМ ОБЪЕКТЕ | 2015 |
|
RU2682925C2 |
| УСТРОЙСТВО И СПОСОБ ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ ИЗ ХАРАКТЕРИСТИЧЕСКИХ СИГНАЛОВ | 2012 |
|
RU2589389C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2569012C2 |
| СПОСОБ КАЛИБРОВКИ НА ОСНОВЕ АЛГОРИТМА НАХОЖДЕНИЯ ЦЕНТРА ВРАЩЕНИЯ ДЛЯ КОРРЕКЦИИ КОЛЬЦЕВЫХ АРТЕФАКТОВ В НЕИДЕАЛЬНЫХ ИЗОЦЕНТРИЧЕСКИХ ТРЕХМЕРНЫХ ВРАЩАТЕЛЬНЫХ РЕНТГЕНОВСКИХ СКАНИРУЮЩИХ СИСТЕМАХ С ИСПОЛЬЗОВАНИЕМ КАЛИБРОВОЧНОГО ФАНТОМА | 2009 |
|
RU2526877C2 |
| СПОСОБ И СИСТЕМА ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ГРУЗОВОГО АВТОМОБИЛЯ | 2018 |
|
RU2724935C1 |
| СИСТЕМА ИНТЕГРИРОВАННОГО ОКТ-РЕФРАКТОМЕТРА ДЛЯ ОКУЛЯРНОЙ БИОМЕТРИИ | 2014 |
|
RU2654274C2 |
| УСТРОЙСТВО СКАНИРУЮЩЕГО ДИСПЛЕЯ | 2005 |
|
RU2379747C2 |
| СКАНИРУЮЩЕЕ РЕНТГЕНОВСКОЕ УСТРОЙСТВО С ПОЛНОФОРМАТНЫМ ДЕТЕКТОРОМ | 2016 |
|
RU2720292C2 |
Настоящее изобретение относится к сканирующему устройству (10, 10') для сканирования объекта (12).Технический результат заключается в повышении точности нахождения правильного положения сканирующего устройства. Сканирующее устройство (10) содержит проекционный блок (16) для проецирования установочного изображения (28) на объект (12), при этом упомянутое установочное изображение (28) содержит главную структуру (26); блок (18) захвата изображения для захвата выдаваемого камерой прямого изображения (30) объекта (12), при этом упомянутое выдаваемое камерой прямое изображение (30) содержит производную структуру (32) главной структуры (26), при этом производная структура (32) представляет упомянутое спроецированное установочное изображение (28) на виде с позиции блока захвата изображения, и блок (22, 22') установки для обеспечения индикации правильного положения и/или правильной ориентации сканирующего устройства (10) относительно сканируемого объекта (12) на основании захваченного выдаваемого камерой прямого изображения (30). 2 н. и 13 з.п. ф-лы, 14 ил.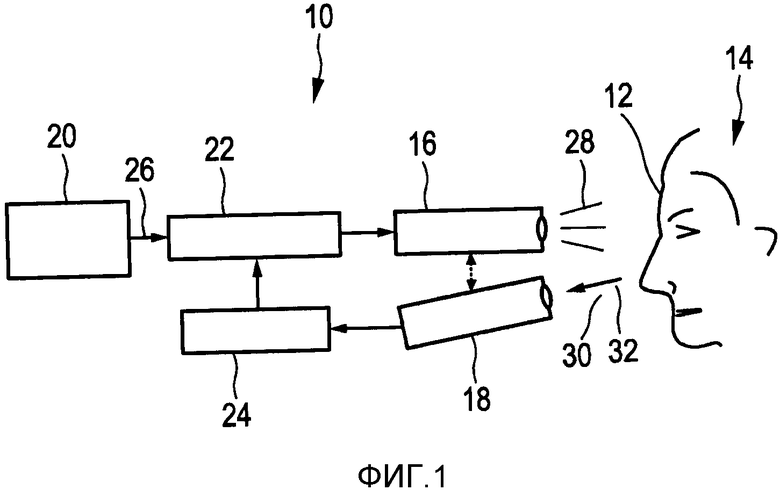
1. Сканирующее устройство для сканирования объекта, содержащее:
- проекционный блок для проецирования установочного изображения на объект, при этом упомянутое установочное изображение содержит главную структуру,
- блок захвата изображения для захвата выдаваемого камерой прямого изображения объекта, при этом упомянутое выдаваемое камерой прямое изображение содержит производную структуру главной структуры, при этом производная структура является производной от упомянутой главной структуры и представляет упомянутое спроецированное установочное изображение на виде с позиции блока захвата изображения, и
- блок установки для обеспечения индикации правильного положения и/или правильной ориентации сканирующего устройства относительно сканируемого объекта на основании захваченного выдаваемого камерой прямого изображения.
2. Сканирующее устройство по п. 1, в котором проекционный блок выполнен с возможностью проецирования статичной главной структуры, при этом блок установки представляет собой блок совмещения, выполненный с возможностью корректировки установочного изображения путем совмещения захваченного выдаваемого камерой прямого изображения и статичной главной структуры, при этом скорректированное установочное изображение указывает на правильное положение и/или правильную ориентацию сканирующего устройства относительно сканируемого объекта, если статичная главная структура и производная структура по существу совпадают в скорректированном установочном изображении.
3. Сканирующее устройство по п. 1, в котором проекционный блок выполнен с возможностью проецирования главной структуры, содержащей базовую структуру, при этом правильное положение и/или правильная ориентация представляют собой правильное расстояние сканирующего устройства относительно сканируемого объекта.
4. Сканирующее устройство по п. 2, дополнительно содержащее
блок обработки данных для обработки захваченного выдаваемого камерой прямого изображения, который выполнен с возможностью подачи обработанного выдаваемого камерой прямого изображения в блок совмещения.
5. Сканирующее устройство по п. 4, в котором блок обработки данных выполнен с возможностью масштабирования выдаваемого камерой прямого изображения.
6. Сканирующее устройство по п. 4, в котором блок обработки данных выполнен с возможностью трансформации выдаваемого камерой прямого изображения таким образом, чтобы главная структура и производная структура по существу совпадали в скорректированном установочном изображении, когда сканирующее устройство правильно установлено по отношению к калибровочному объекту.
7. Сканирующее устройство по п. 2, в котором блок совмещения выполнен с возможностью применения другой яркости и/или другого цвета к захваченному выдаваемому камерой прямому изображению по сравнению с главной структурой.
8. Сканирующее устройство по п. 2, в котором блок совмещения выполнен с возможностью многократной корректировки установочного изображения путем многократного совмещения непрерывно захватываемого выдаваемого камерой прямого изображения и главной структуры.
9. Сканирующее устройство по п. 1, в котором проекционный блок выполнен с возможностью проецирования главной структуры, содержащей маркерную структуру, при этом блок установки содержит вычислительный блок для
- определения величины глубины спроецированной маркерной структуры на основании захваченного выдаваемого камерой прямого изображения, при этом величина глубины представляет расстояние между положением спроецированной маркерной структуры и сканирующим устройством, и
- вычисления погрешности установки сканирующего устройства на основании найденной величины глубины, при этом погрешность установки представляет отклонение фактического положения сканирующего устройства от правильного положения и/или правильной ориентации сканирующего устройства, при этом
индикация правильного положения и/или правильной ориентации сканирующего устройства основана на погрешности установки.
10. Сканирующее устройство по п. 9, в котором блок установки содержит блок представления для представления индикации правильного положения и/или правильной ориентации сканирующего устройства оператору сканирующего устройства.
11. Сканирующее устройство по п. 10, в котором блок представления выполнен с возможностью представления индикации правильного положения и/или правильной ориентации сканирующего устройства, которая содержит величину и/или направление погрешности установки.
12. Сканирующее устройство по п. 10, в котором блок представления содержит блок наложения для корректировки установочного изображения путем наложения главной структуры и изображения, содержащего индикацию правильного положения и/или правильной ориентации сканирующего устройства.
13. Сканирующее устройство по п. 10, в котором блок представления содержит блок визуального отображения для отображения изображения, содержащего индикацию правильного положения и/или правильной ориентации сканирующего устройства, и/или акустический блок для звукового сообщения информации, содержащей индикацию правильного положения и/или правильной ориентации сканирующего устройства.
14. Сканирующее устройство по п. 9, в котором проекционный блок выполнен с возможностью проецирования маркерной структуры, содержащей структуру с пространственным и/или временным кодированием.
15. Способ позиционирования сканирующего устройства относительно сканируемого объекта, при этом упомянутый способ содержит этапы, на которых:
- проецируют установочное изображение на объект, при этом упомянутое установочное изображение содержит главную структуру,
- захватывают выдаваемое камерой прямое изображение объекта, при этом упомянутое выдаваемое камерой прямое изображение содержит производную структуру главной структуры, при этом производная структура является производной от
упомянутой главной структуры и представляет упомянутое спроецированное установочное изображение на виде из точки захвата изображения,
- обеспечивают индикацию правильного положения и/или правильной ориентации сканирующего устройства относительно сканируемого объекта на основании захваченного выдаваемого камерой прямого изображения.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| RU2001101173A, 27.01.2003 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

