Область техники, к которой относится изобретение
Настоящее изобретение относится к трехмерным вращательным рентгеновским системам получения изображений для использования в компьютерной томографии (СТ) и, более конкретно, к быстрому точному и математически надежному способу калибровки для определения эффективного центра вращения в неидеально изоцентрических трехмерных вращательных системах с C-образным кронштейном и к устранению, главным образом, круговых кольцевых артефактов, возникающих при использовании такой системы томографического сканера для получения набора двумерных проекционных изображений интересующего объекта, подлежащего трехмерной реконструкции. С этой целью вращательный томографический сканер на основе C-образного кронштейна, имеющий, по меньшей мере, один радиационный детектор с поверхностью, чувствительной к рентгеновскому излучению, подвергающийся воздействию рентгеновского пучка, излучаемого, по меньшей мере, одной рентгеновской трубкой, причем оба они вращаются вдоль неидеальной круговой траектории вокруг интересующего объекта, подлежащего трехмерной реконструкции из набора двумерных проекционных изображений, используется для обеспечения геометрических калибровочных данных, сканируя калибровочный фантом с множества различных проекционных направлений и вычисляя для каждого проекционного направления трехмерные положения фокального пятна рентгеновской трубки и центра рентгеновского детектора. Для аппроксимации точного трехмерного положения и углового направления оси вращения, вокруг которой вращаются, по меньшей мере, одна рентгеновская трубка и, по меньшей мере, один детектор, применяется способ круговой регрессии, использующий множество математически надежных подборов методом наименьших квадратов.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В настоящее время томографическая рентгеновская технология получения изображений получила широкое признание в различных областях, таких как клиническая диагностика, промышленный контроль и проверка безопасности. В клинической области специализированные системы получения изображений посредством компьютерной томографии с высокой разрешающей способностью появились недавно в качестве важных новых инструментов для исследований рака, поскольку сканирование на основе компьютерной томографии является важным медицинским способом получения изображения для неинвазивного исследования интересующей области (такой как, например, внутренние органы, сердечно-сосудистая система и/или любые другие анатомические или патологические структуры) внутри тела пациента. Томографическая система получения изображений, таким образом, получает ряд двумерных проекционных изображений с множества различных проекционных направлений вокруг пациента, которые затем могут использоваться для создания трехмерной реконструкции анатомии, подлежащей визуализации.
С недавнего времени, с появлением и использованием спиральной компьютерной томографии, на которой основано новое поколение томографических сканеров, радиологи имеют возможность сэкономить много времени посредством быстрого обследования пациента во время одной задержки дыхания, используя, таким образом, способность получения трехмерных изображений сегодняшних вращательных томографических систем получения изображений. В традиционной изоцентрической трехмерной вращательной рентгеновской сканирующей системе типа вращающейся портальной рамы, которая используется в многослойной спиральной компьютерной томографии, детекторная матрица, чувствительная к рентгеновскому излучению, облучается веерным или конусным рентгеновским пучком, излучаемым рентгеновской трубкой, установленной диаметрально относительно упомянутой детекторной матрицы, и в которой как упомянутая рентгеновская трубка, так и упомянутая детекторная матрица размещаются на вращающейся портальной раме, непрерывно вращающейся вокруг пациента. Чтобы получить набор двумерных проекционных изображений, которые могут использоваться для реконструкции трехмерного изображения анатомического объема внутри тела пациента при проведении неинвазивного исследования, рентгеновская трубка и детекторная матрица вращаются вдоль круговой траектории вокруг тела пациента, в то время как пациент лежит на столе для пациента, который продвигается вперед вдоль оси вращения.
Трехмерные системы получения изображения с детектором плоского пучка работают посредством вращения рентгеновской трубки и детектора по круговым траекториям вокруг центральной оси вращения. Ось вращения помещается так, чтобы находиться в центре интересующей области или объема анатомии пациента. Рентгеновская трубка и рентгеновский детектор, такой как электронно-оптический преобразователь изображения, как правило, устанавливаются на противоположных концах вращающегося опорного сборочного узла C-образного кронштейна. Рентгеновская трубка облучает пациента рентгеновским пучком, который падает на интересующую область (ROI) и поглощается внутренней анатомией. Прежде чем ослабленный рентгеновский пучок попадет на рентгеновский детектор, рентгеновский пучок проходит через пациента и поглощается внутренней анатомией пациента. Трехмерные данные изображения формируются посредством получения ряда изображений в то время, когда сборочный узел рентгеновской трубки/C-образного кронштейна/детектора вращается вокруг оси вращения, центрованной относительно интересующей области внутри пациента. Множество двумерных изображений поперечных сечений обрабатываются и объединяются, чтобы создать трехмерное изображение сканируемого объекта.
Традиционные подвижные сборочные узлы с C-образным кронштейном используют простые опорные конструкции и геометрии для установки рентгеновской трубки и рентгеновского детектора на C-образном кронштейне. Опорная конструкция удерживает рентгеновскую трубку и детектор на C-образном кронштейне и поддерживает заданное постоянное расстояние между рентгеновской трубкой и рентгеновским детектором. Таким образом, расстояние между рентгеновской трубкой и осью вращения и расстояние между детектором и осью вращения остаются постоянными и неизменными.
В существующих рентгеноскопических системах получения изображений с C-образным кронштейном, трехмерная реконструкция томографического изображения может быть выполнена посредством свиппирования C-образного кронштейна по полукруглой дуге вокруг интересующего объекта. При использовании поперечного движения кронштейна дуга является круговой и, следовательно, изоцентрической. Например, используя C-образный кронштейн, рентгеновский пучок может сканироваться вокруг головы пациента (например, томографическое сканирование по дуге окружности вокруг головы). Реконструкция изображения объема выполняется посредством двумерных проекционных сканированных изображений. Свиппирования осуществляются поперечным движением C-образного кронштейна, расположенного над головной частью стола и свиппирующего вокруг головной части стола. Таким образом, объект остается в центре (изоцентрическое движение).
Независимо от применяемой технологии, трехмерные реконструированные изображения интересующего объекта, которые вычисляются из набора двумерных проекционных изображений, полученных с множества различных проекционных направлений вращательным томографическим сканером, часто сильно искажаются артефактами компьютерной томографии, возникающими из-за различия между обнаруженными значениями интенсивности в полученном томографическом изображении и ожидаемыми коэффициентами ослабления объекта, подлежащего визуализации. Это происходит по многим причинам, которые будут кратко объяснены в следующем разделе. Такие артефакты, которые все еще сохраняются в спиральной компьютерной томографии, как при традиционном томографическом рентгеновском получении изображений, могут чрезвычайно ухудшать качество изображения реконструированного томографического изображения и играют важную роль в точности диагностики. К сожалению, не всегда возможно сказать, существует ли фактически артефакт в томографическом изображении, потому что часто это зависит от решения радиолога. В случае сильных артефактов, однако, врачи часто не в состоянии поставить достоверный диагноз из-за того, что интересующие анатомии могут быть скрыты или полностью искажены. В целом, артефакты в компьютерной томографии могут быть разделены на четыре категории: a) артефакты, связанные с физикой, к которым относятся артефакты из-за увеличения жесткости пучка, нехватки фотонов и артефакты субдискретизации, b) артефакты, связанные с пациентом, к которым относятся артефакты из-за присутствия металла и движения, c) артефакты, связанные со сканером, к которым относятся артефакты, вызванные чувствительностью детектора и механической неустойчивостью (которые являются тем типом артефактов, которым посвящено настоящее изобретение), а также d) артефакты, связанные со спиралью, возникающие из-за спиральной интерполяции. Тщательное позиционирование пациента, исключение движения пациента и оптимальный выбор параметров сканирования, являются, таким образом, важными факторами для избежания артефактов компьютерной томографии.
Огромное большинство артефактов в изображениях компьютерной томографии проявляются как эффекты тянущегося следа изображения и могут быть вызваны металлическими объектами, увеличением жесткости пучка, недостатком фотонов и/или движением объекта. Если значение результата измерения по одному детекторному каналу при одиночном считывании испытывает помеху, происходит возникновение тянущегося следа изображения. Если при полном обороте выпадает один канал, что имеет место, когда рентгеновский детектор вращательной системы томографического сканера третьего поколения не калиброван, то детектор будет постоянно производить ошибочное считывание при каждом считывании в его угловом положении, и, следовательно, результатом явится круговой кольцевой артефакт.
Другая важная причина появления кольцевых артефактов состоит в том, что традиционные, основанные на С-образном кронштейне, трехмерные вращательные рентгеновские сканирующие системы для использования в компьютерной томографии, которые способны выполнять сканирование при вращении для трехмерной реконструкции интересующего объекта, такого как, например, анатомическая область внутри тела пациента, которая должна неинвазивно исследоваться посредством получения томографического рентгеновского изображения, могут не быть идеально изоцентрическими. На практике механический изгиб и люфт, а также неидеальное выравнивание механических узлов, могут заставить "центр вращения" изменяться в зависимости от угла вращения. Многие традиционно используемые системы с C-образным кронштейном не способны выполнить точную трехмерную томографическую реконструкцию с орбитальным движением C-образного кронштейна, поскольку траектории рентгеновской трубки и детекторной матрицы не могут быть идеально изоцентрическими. Как следствие, полученные двумерные проекционные изображения интересующего объекта, который должен трехмерно реконструироваться, искажаются из-за неизоцентрической дуги получения изображений и непригодны для клинических, диагностических или оперативных целей. Хотя круговые кольцевые артефакты редко могут быть спутаны с патологической структурой, они могут сильно ухудшать качество диагностики томографического изображения. Для точного обнаружения кольцевого артефакта и коррекции, таким образом, существенно важно, чтобы центр кольцевого артефакта, который устанавливает эффективный центр вращения, был известен очень точно, что означает субмиллиметровый уровень точности вплоть до размера воксела в трехмерном объеме, особенно при получении изображений мягкой ткани. Это положение центра может затем использоваться для исключения кольцевых артефактов в предоставленных трехмерных реконструкциях объекта, подлежащего визуализации. Следовательно, были бы очень желательны система и способ калибровки, улучшающие реконструкцию томографического изображения, исключая круговые кольцевые артефакты, которые могут возникать из-за неизоцентрического движения рентгеновской трубки и детекторной матрицы при получении двумерных проекционных изображений объекта с помощью неидеально изоцентрической трехмерной вращательной рентгеновской сканирующей системы.
Патент США 2005/0084147 А1 предлагает способ трехмерной реконструкции интересующего объекта, основанный на наборе двумерных проекционных изображений, получаемом вдоль неизоцентрической траектории. Как описано в этом документе, упомянутый способ содержит этапы, на которых определяют и изменяют расстояния между объектом и, по меньшей мере, рентгеновской трубкой или рентгеновским детектором, чтобы сформировать виртуальный изоцентр, поддерживают объект в упомянутом виртуальном изоцентре во время получения изображения упомянутого объекта, нормализуют изменения увеличения в данных изображения, полученных при поддержании упомянутого виртуального изоцентра, и реконструируют изображения упомянутого объекта, основываясь на упомянутых данных изображения и упомянутом нормализованном изменении усиления. Раскрытый здесь способ может дополнительно содержать этап перемещения основания, содержащего рентгеновский детектор и рентгеновскую трубку по некруговой дуге, чтобы перемещать детектор и трубку вокруг объекта, в то же время изменяя расстояние между детектором и объектом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
При использовании трехмерных вращательных рентгеновских сканирующих систем на основе С-образного кронштейна, которые не являются идеально изоцентрическими, традиционные способы реконструкции, соответствующие предшествующему уровню техники, как правило, применяют нелинейные математические методы для определения эффективного центра вращения. Эти методы обладают теми недостатками, что они обеспечивают "решение", но не обязательно наилучшее, что они не работают при компьютерных томографических сканированиях, охватывающих диапазон углов 180 градусов или меньше (таких как, например, для угловых сканирований XperCT, являющихся частью изделия XtraVision компании Philips), и что они не учитывают, что ось вращения не является совершенно перпендикулярной плоскости получения изображения, по существу, круговых траекторий, вдоль которых движутся рентгеновская трубка и детекторная матрица при получении набора двумерных проекционных изображений.
Настоящее изобретение, таким образом, направлено на решение задачи облегчения коррекции круговых кольцевых артефактов на основе сканеров, которые могут возникнуть при использовании неидеально изоцентрической трехмерной вращательной рентгеновской сканирующей системы из-за неидеально изоцентрического движения рентгеновской трубки и детекторной матрицы, улучшая, таким образом, качество изображения томографически реконструированных трехмерных изображений, вычисляемых на основе набора данных вокселов, полученных посредством объединения данных изображения набора двумерных проекционных изображений, получаемых с многочисленных различных проекционных направлений вдоль, по существу, круговой траектории вокруг интересующего объекта, подлежащего визуализации.
С точки зрения этой задачи первый пример варианта осуществления настоящего изобретения относится к способу калибровки для устранения, по существу, круговых кольцевых артефактов в наборе рентгенографических двумерных проекционных изображений, получаемых с многих различных проекционных направлений неидеально изоцентрической трехмерной вращательной рентгеновской сканирующей системой, снабженной, по меньшей мере, одной рентгеновской трубкой и, по меньшей мере, одним сопутствующим рентгеновским детектором, установленным диаметрально относительно упомянутой рентгеновской трубки.
Предложенный способ калибровки, таким образом, содержит этап сканирования калибровочного фантома с каждого из упомянутых проекционных направлений при перемещении упомянутой рентгеновской трубки и рентгеновского детектора вдоль круговой траектории вокруг объекта, подлежащего визуализации, и томографической реконструкции. Для каждого проекционного направления трехмерное положение фокального пятна, по меньшей мере, одной рентгеновской трубки и трехмерного положения центра сопутствующего, по меньшей мере, одного рентгеновского детектора вычисляется из полученных двумерных проекционных изображений. После этого трехмерные координаты эффективного центра вращения, вокруг которого вращается неидеально изоцентрическая трехмерная вращательная рентгеновская сканирующая система, определяются из набора геометрических данных калибровки, получающихся в результате процедуры трехмерной калибровки, выполняемой на основе вычисленных трехмерных позиционных данных.
В соответствии с этим первым примером варианта осуществления, можно прогнозировать, что упомянутая процедура трехмерной калибровки основана на алгоритме круговой регрессии, который вычисляет положение центра и радиус окружности регрессии, наилучшим образом подогнанной к двумерной проекции, по существу, кругового кольцевого артефакта, который получается при сканировании упомянутого калибровочного фантома с каждого из упомянутых проекционных направлений и проецирования результирующего, по существу, кругового кольцевого артефакта на проекционную плоскость, в которой лежит упомянутая окружность регрессии. Этот алгоритм круговой регрессии может содержать подбор методом наименьших квадратов, давая в результате окружность, наилучшим образом соответствующую набору точек, формирующих, по существу, круговой кольцевой артефакт, которая указывает трехмерные положения, полученные делением каждой линии, соединяющей положение фокального пятна, по меньшей мере, одной рентгеновской трубки и положение центра сопутствующего, по меньшей мере, одного рентгеновского детектора, в соответствии с заданным отношением деления. Это отношение деления может определяться для каждого из упомянутых проекционных направлений показателем расстояния между мгновенным положением фокального пятна, по меньшей мере, одной рентгеновской трубки и текущим положением центра вращения для конкретного проекционного угла в соответствующее время получения изображения и расстояния между мгновенным положением центра упомянутого, по меньшей мере, одного рентгеновского детектора и текущим центром вращения для этого проекционного угла в этот момент времени. Положение центра результирующей окружности регрессии, вычисленное посредством процедуры трехмерной калибровки, может затем интерпретироваться как эффективный центр вращения в проекционной плоскости, по существу, кругового кольцевого артефакта при реконструкции интересующего объекта из полученного набора рентгенографических двумерных проекционных изображений.
В соответствии с дополнительным усовершенствованием этого первого примера варианта осуществления, можно прогнозировать, что направление вектора, перпендикулярного плоскости результирующего круга регрессии, интерпретируется как направленный вектор эффективной оси вращения при реконструкции интересующего объекта из полученного набора рентгенографических двумерных проекционных изображений. Этот направленный вектор может, таким образом, быть вычислен на основе критерия оптимизации методом наименьших квадратов для подбора набора точек, причем упомянутые точки состоят из заданного количества дискретных точек в различных угловых положениях фокального пятна, по меньшей мере, одной рентгеновской трубки на траектории фокального пятна и соответствующего количества дискретных точек в диаметрально противоположных положениях центра, по меньшей мере, одного рентгеновского детектора на траектории детектора для набора дискретных времен получения изображений при получении упомянутого набора рентгенографических двумерных проекционных изображений с упомянутого количества различных проекционных направлений в окружность регрессии и интерпретации нормального вектора на плоскости результирующей окружности регрессии как направленного вектора эффективной оси вращения.
Эффективный центр вращения может затем вычисляться как точка, расположенная между плоскостью траектории фокального пятна, по меньшей мере, одной рентгеновской трубки и плоскостью траектории центра, по меньшей мере, одного сопутствующего рентгеновского детектора, где упомянутая точка, таким образом, лежит на направлении упомянутого нормального вектора, а именно, на расстоянии до упомянутой плоскости траектории фокуса и упомянутой плоскости траектории детектора, для которого отношение расстояний равно упомянутому отношению деления.
Второй пример варианта осуществления настоящего изобретения обращен к способу томографической реконструкции интересующего объекта из набора рентгенографических двумерных проекционных изображений, полученных с множества различных проекционных направлений неидеально изоцентрической трехмерной вращательной рентгеновской сканирующей системой, содержащей, по меньшей мере, одну рентгеновскую трубку и, по меньшей мере, один сопутствующий рентгеновский детектор, установленный диаметрально относительно упомянутой рентгеновской трубки, в котором упомянутые изображения получают при движении упомянутой рентгеновской трубки и упомянутого рентгеновского детектора вдоль двух круговых траекторий вокруг упомянутого объекта. В соответствии с настоящим изобретением, упомянутый способ может содержать способ калибровки для исключения, по существу, круговых кольцевых артефактов, как указано выше в отношении упомянутого первого примера варианта осуществления.
Третий пример варианта осуществления настоящего изобретения посвящен трехмерной вращательной рентгеновской сканирующей системе на основе C-образного кронштейна для использования в компьютерной томографии, которая не является идеально изоцентрической, в котором упомянутая система содержит блок калибровки, выполненный с возможностью осуществления способа калибровки, как указано выше в отношении упомянутого первого примера варианта осуществления. Кроме того, предложенная система с C-образным кронштейном может содержать блок реконструкции, взаимодействующий с упомянутым блоком калибровки, в котором упомянутый блок реконструкции выполнен с возможностью осуществления способа реконструкции, как указано выше в отношении упомянутого второго примера варианта осуществления.
Наконец, четвертый пример варианта осуществления настоящего изобретения относится к компьютерному программному продукту для выполнения способа, как указано выше в отношении упомянутого первого примера варианта осуществления, когда он осуществляется и работает на блоке калибровки для калибровки трехмерной вращательной рентгеновской сканирующей системы на основе С-образного кронштейна, как указано выше в отношении упомянутого третьего примера варианта осуществления. В качестве предпочтительного аспекта настоящего изобретения, дополнительно может быть обеспечено, что упомянутый компьютерный программный продукт может содержать стандартную программу системы программного обеспечения для выполнения способа, как указано выше в отношении упомянутого второго примера варианта осуществления, когда он осуществляется и работает на блоке реконструкции трехмерной вращательной рентгеновской системы получения трехмерных изображений на основе С-образного кронштейна, как указано выше в отношении упомянутого третьего примера варианта осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие предпочтительные аспекты изобретения будут объясняться посредством примера в отношении вариантов осуществления, описанных здесь далее, и со ссылкой на сопроводительные чертежи. Здесь,
Фиг.1а - традиционная конфигурация известной на предшествующем уровне техники установки вращательной рентгеновской сканирующей системы на основе подвижного С-образного кронштейна для использования при томографическом рентгеновском получении изображений,
Фиг.1b - схематическая блок-схема, показывающая путь прохождения сигнала, необходимого для управления работой вращательной рентгеновской сканирующей системы с С-образным кронштейном, показанной на фиг.1a,
Фиг.2 - поперечное сканирование тела, ухудшенное круговыми кольцевыми артефактами, получившимися из-за неполного выравнивания механических компонент вращательной рентгеновской сканирующей системы на основе подвижного C-образного кронштейна, которое заставляет центр вращения изменяться в зависимости от угла вращения,
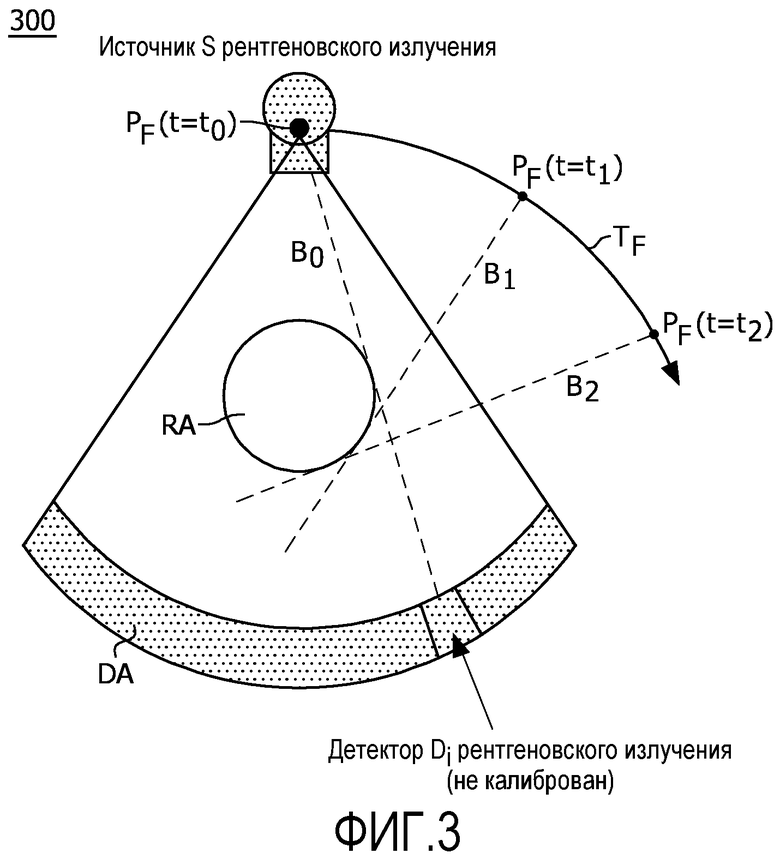
Фиг.3 - формирование кругового кольцевого артефакта во время процедуры получения изображения идеально изоцентрической трехмерной вращательной сканирующей системой третьего поколения, содержащей один рентгеновский детектор, не имеющий калибровки,
Фиг.4a - трехмерная диаграмма, показывающая одну половину не полностью круговой траектории, на которой фокальное пятно рентгеновской трубки неидеальной изоцентрической трехмерной вращательной рентгеновской сканирующей системы перемещается, и соответствующую половину неидеально круговой траектории, по которой движется центр рентгеновского детектора, расположенного напротив упомянутой рентгеновской трубки, причем упомянутые траектории определяются, используя калибровочный фантом, а также положения и угловое направление соответствующего эффективного центра вращения и эффективной оси вращения, которые получаются в результате способа калибровки, как указано в настоящей заявке,
Фиг.4b - двумерная диаграмма, показывающая спроецированный в двумерную проекционную плоскость набор точек, образующий траекторию фокуса (половина окружности с большим радиусом, показанная жирной линией) и дополнительный набор точек, образующий траекторию детектора (половина окружности с малым радиусом, показанная жирной линией), а также соответствующие окружности регрессии, наилучшим образом подогнанные к соответствующим траекториям согласно критерию оптимизации методом наименьших квадратов,
Фиг.4c - увеличенная в масштабе версия двумерной диаграммы, показанной на фиг.4b в области, ближней к вычисленному эффективному центру вращения, показывающая спроецированный, таким образом, на упомянутую выше двумерную проекционную плоскость набор точек, образующий артефакт, немного напоминающий окружность, который подогнан к окружности регрессии в соответствии с критерием оптимизации методом наименьших квадратов, и
Фиг.5 - блок-схема последовательности выполнения операций способа калибровки и трехмерной реконструкции в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
В дальнейшем, заявленные способ калибровки и трехмерная вращательная рентгеновская сканирующая система получения изображений на основе С-образного кронштейна, соответствующие описанным выше примерам вариантов осуществления настоящего изобретения, будут объяснены более подробно в отношении специальных усовершенствований и со ссылкой на сопроводительные чертежи.
На фиг.1a представлена традиционная конфигурация установки вращательной рентгеновской сканирующей системы 100а на основе подвижного С-образного кронштейна для использования при томографическом рентгеновском получении изображений, соответствующая предшествующему уровню техники (например, такая, которая раскрыта в патенте США 2002/0168053 A1). Изображенная компьютерная томографическая система содержит источник S рентгеновского излучения и рентгеновский детектор D, находящиеся на противоположных концах C-образного кронштейна СА, установленного посредством осевой шейки, чтобы иметь возможность вращаться вокруг горизонтальной оси PA двигателя, и горизонтальная ось САА C-образного кронштейна сделана перпендикулярной к упомянутой оси двигателя посредством рамы М C-образного кронштейна, позволяя, таким образом, упомянутым рентгеновского источнику и рентгеновскому детектору вращаться на угол (θ1 или θ2, соответственно) вращения вокруг оси y и/или оси z неподвижной трехмерной прямоугольной системы координат с ортогональными осями координат x, y и z, в которой ось x имеет направление оси САА C-образного кронштейна, ось y является вертикальной осью, перпендикулярной к плоскости стола для пациента (плоскость z-x), и ось z имеет направление оси РА двигателя. Ось CAA С-образного кронштейна, направленная в направлении, перпендикулярном к плоскости чертежа (плоскость y-z), таким образом, проходит через изоцентр IC сборочного узла C-образного кронштейна. Прямая соединительная линия между положением фокального пятна рентгеновского источника S и положением центра рентгеновского детектора D пересекает ось РА двигателя и ось CAA С-образного кронштейна в точке с координатами изоцентра IC. C-образный кронштейн СА устанавливается посредством L-образного кронштейна LA, чтобы иметь возможность вращения вокруг оси LAA L-образного кронштейна, которая имеет направление по оси Y и пересекает ось РА двигателя и ось САА C-образного кронштейна в точке с координатами изоцентра IC. Блок CU управления обеспечивается для непрерывного управления работой, по меньшей мере, двух двигателей, используемых для перемещения рентгеновского источника S и рентгеновского детектора D вдоль указанной траектории вокруг интересующего объекта, помещенного в области изоцентра IC в пределах сферической орбиты (диапазон исследования), охваченной C-образным кронштейном САА при вращении вокруг оси LAA L-образного кронштейна или оси РА двигателя. Из фиг.1a можно легко получить, что C-образный кронштейн СА с рентгеновским детектором D и рентгеновским источником S может вращаться вокруг оси САА C-образного кронштейна, тогда как в то же самое время рама М C-образного кронштейна вращается вокруг оси РА двигателя, и получаются проекционные изображения интересующего объекта, подлежащего исследованию.
На фиг.1b приведена схематическая блок-схема 100b прохождения сигнала, необходимого для управления работой вращательной рентгеновской сканирующей системы 100a на основе С-образного кронштейна, показанной на фиг.1a. На схематической блок-схеме, представленной на фиг.1b, показан только один ряд детекторных элементов D (то есть строка детектора). Однако многослойная детекторная матрица, такая как обозначенная ссылочной позицией DA, содержит множество параллельных строк детекторных элементов D, так что проекционные данные, соответствующие множеству квазипараллельных или параллельных слоев, могут быть получены во время сканирования одновременно. Альтернативно, для получения данных для конусного пучка может быть использован распределенный детектор. Работа рентгеновского источника S управляется механизмом управления компьютерной томографической системы 100a, который управляется блоком CU управления. Блок CU управления содержит рентгеновский контроллер Ctr, обеспечивающий сигналы подачи мощности и синхронизации на рентгеновский источник S. Система DAS сбора данных, принадлежащая к упомянутому механизму CU управления, делает выборку аналоговых данных из элементов D детектора и преобразует данные в цифровые сигналы для последующей обработки. Реконструктор IR изображения принимает выбранные и оцифрованные рентгеновские данные от системы DAS сбора данных и выполняет высокоскоростную реконструкцию изображения. Реконструированное изображение подается в качестве входного сигнала на рабочее место WS, которое запоминает изображение в запоминающем устройстве St большой емкости. Реконструктор IR изображения может быть специализированным аппаратурным обеспечением, постоянно присутствующим на рабочем месте WS, или программой системы программного обеспечения, выполняемой этим компьютером.
Рабочее место WS также принимает сигналы через интерфейс пользователя или графический интерфейс пользователя (GUI). Конкретно, упомянутый компьютер принимает команды и параметры сканирования от пульта ОС оператора, который в некоторых конфигурациях может содержать клавиатуру и "мышь" (не показаны). Сопутствующий дисплей DIS (например, дисплей с электронно-лучевой трубкой) позволяет оператору наблюдать реконструированное изображение и другие данные с рабочего места WS. Подаваемые оператором команды и параметры используются рабочим местом WS для подачи управляющих сигналов и информации на рентгеновский контроллер Ctr, систему DAS сбора информации и контроллер MC двигателя стола (также называемый "контроллер движения"), связанный с моторизованным столом PT для пациента, который управляет упомянутым столом для пациента, чтобы точно располагать пациента Pt. В некоторых конфигурациях рабочее место WS может содержать устройство MR хранения данных (также упоминаемое как "устройство считывания носителя"), например, дисковод для дискет, дисковод для компакт-дисков, DVD-дисковод, дисковод для магнитных оптических дисков (MOD) или любое другое цифровое устройство, в том числе, устройство подключения к сети, такое как устройство Ethernet для считывания команд и/или данных со считываемого компьютером носителя CRM, такого как, например, дискета, диск CD-ROM или DVD.
На фиг.2 показан результат поперечного сканирования тела, ухудшенный многочисленными концентрическими круговыми кольцевыми артефактами (RA1, RA2, RA3, RA4 и RA5), получившимися из-за неидеального выравнивания механических компонент вращательной рентгеновской сканирующей системы на основе С-образного кронштейна, которая неидеально изоцентрична (чтобы быть более точным, из-за неидеального выравнивания центра рентгеновской трубки и рентгеновского детектора или детекторной матрицы, подвергаемой воздействию и облучаемой рентгеновским пучком, излучаемым упомянутой рентгеновской трубкой), что заставляет центр вращения изменяться в зависимости от угла вращения. Так как ось вращения может не быть точно перпендикулярной к поперечной плоскости изображения (плоскость x-y), соответствующей двум ортогональным осям координат, x и y, центр вращения может отличаться для каждого слоя трехмерно реконструированного интересующего объекта (см. фиг.4c).
На фиг.3 схематично представлена диаграмма, показывающая формирование кругового кольцевого артефакта RA во время процедуры получения изображения с помощью идеально изоцентрической трехмерной вращательной рентгеновской сканирующей системы третьего поколения с вращающейся рентгеновской трубкой S, фокальное пятно которой перемещается в плоскости получения изображения вдоль круговой траектории T F вокруг интересующего объекта (не показан), и cопутствующей вращающейся рентгеновской детекторной матрицей DA, расположенной на стороне, противоположной упомянутому рентгеновскому источнику, в которой один рентгеновский детектор Di, который содержится в упомянутой детекторной матрице DA, не калиброван. Как уже объяснялось выше, такой круговой кольцевой артефакт RA может также возникнуть при трехмерно реконструируемом интересующем объекте из данных вокселов набора двумерных проекционных изображений, которые были получены рентгеновской трубкой и рентгеновским детектором неидеальной изоцентрической трехмерной вращательной рентгеновской сканирующей системы в то время, когда фокальное пятно рентгеновской трубки и центр детектора рентгеновского детектора движутся вдоль неидеально круговой траектории T F фокуса или неидеально круговой траектории T CD детектора, соответственно.
Обратимся теперь к фиг.4a, где показана трехмерная диаграмма, изображающая одну половину неидеальной круговой траектории T
F фокуса, пройденную фокальным пятном рентгеновской трубки S трехмерной вращательной рентгеновской сканирующей системы, и соответствующую половину неидеально круговой траектории T
CD детектора, пройденную центром рентгеновского детектора D, установленного диаметрально относительно упомянутой рентгеновской трубки и подвергаемого воздействию и облучаемого рентгеновским пучком, излучаемым упомянутой рентгеновской трубкой, как определено в объеме способа калибровки и как описано и заявляется в настоящей заявке. Как описано выше, упомянутые траектории могут быть определены в трехмерном пространстве, используя калибровочный фантом. Как результат описанного здесь способа, получаются позиционный вектор 



На фиг.4b представлена двумерная диаграмма, показывающая спроецированный в двумерную проекционную плоскость (плоскость x'-y'), как она задана плоскостью траектории фокуса (здесь в качестве примера показана как компланарная к плоскости траектории детектора), набор точек, формирующий упомянутую траекторию T F фокуса, (полуокружность с большим радиусом, показанная жирной линией) и дополнительный набор точек, формирующий упомянутую траекторию TCD детектора (полуокружность с малым радиусом, показанная жирной линией). Дополнительно, на этой двумерной диаграмме изображаются соответствующая окружность регрессии RC F, наилучшим образом подогнанная к траектории фокуса, и соответствующая окружность RC D регрессии, наилучшим образом подогнанная к траектории детектора в соответствии с критерием оптимизации методом наименьших квадратов. Точки P F(t=t n) и P CD(t=t n) обозначают мгновенные положения фокального пятна рентгеновской трубки и центр упомянутого рентгеновского детектора D в дискретные моменты времени получения изображения t=t n (где t n = t 0 + nΔt и n ∈ {0, 1, 2.. .., N}, t 0 - момент запуска процедуры получения изображения, и Δt - интервал сканирования между получением двух последовательных двумерных проекционных изображений с двух проекционных направлений при вращении рентгеновской трубки S и рентгеновского детектора D трехмерной вращательной сканирующей системы с C-образным кронштейном вокруг интересующего объекта, подлежащего томографической реконструкции и визуализации).
На фиг.4c представлена увеличенная в масштабе версия двумерной диаграммы, показанной на фиг.4b, в области вблизи вычисленного эффективного центра вращения 


Следует заметить, что описанный выше способ относится только к подбору методом наименьших квадратов упомянутого набора точек, образующего упомянутый артефакт, спроецированный на плоскость траектории фокуса, к окружности регрессии, которая лежит в этой плоскости. Практически, однако, из-за механических сдвигающих сил и изгибающих моментов, приложенных к концам C-образного кронштейна CA, на котором устанавливаются рентгеновская трубка и рентгеновский детектор и/или из-за неидеального выравнивания этих системных компонент, истинная эффективная ось вращения (здесь, для примера, заданная осью PA двигателя) не точно перпендикулярна к точно вертикальной плоскости получения изображения (плоскость x-y), как это требуется для точного выполнения поперечного сканирования тела. Поэтому должен быть выполнен еще один этап. В соответствии с дополнительным усовершенствованием процедуры, как описано выше, предложенный способ содержит подбор методом наименьших квадратов набора точек, состоящего из дискретных положений P
F(t=t
n) фокального пятна на траектории T
F
фокуса, и соответствующих дискретных положений P
CD(t=t
n) центра детектирования на траектории T
CD к окружности регрессии в трехмерном пространстве. Полученная окружность регрессии лежит в плоскости, которая может затем интерпретироваться как составляющая истинную эффективную плоскость вращения E, в дальнейшем также упоминаемую как "плоскость x-y" (не показана). Вектор 

Упомянутая процедура усовершенствования дополнительно прогнозирует, что истинный эффективный центр вращения, в дальнейшем упоминаемый как

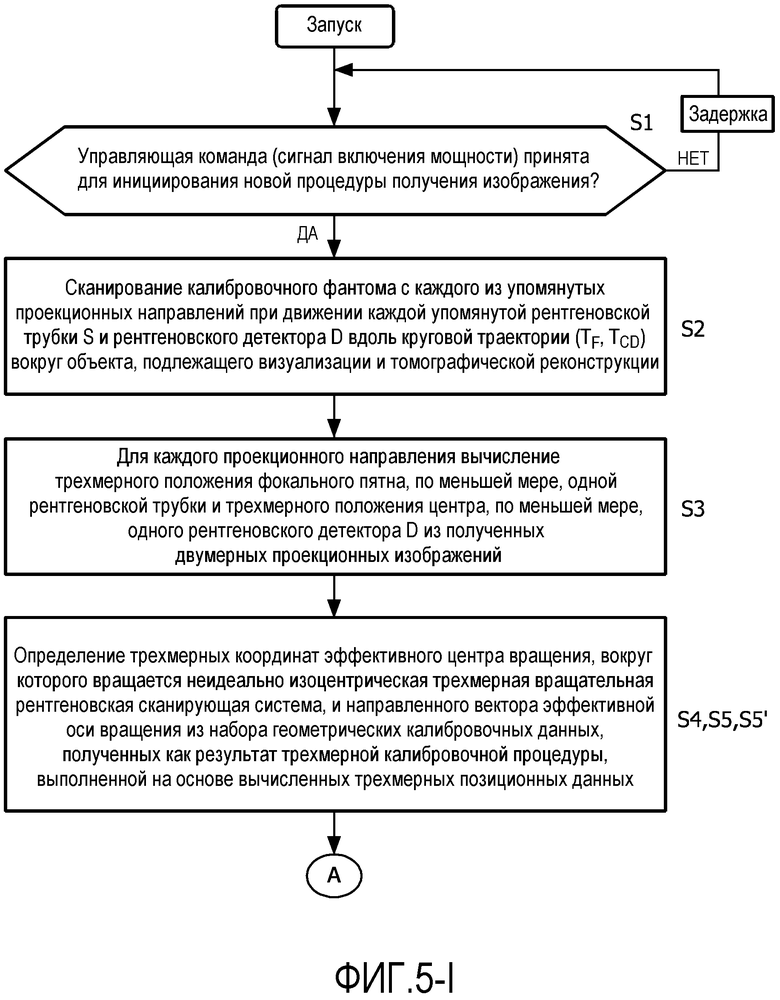
Блок-схема последовательности выполнения операций для пояснения способа калибровки и трехмерной реконструкции, соответствующего настоящему изобретению, показана на фиг.5.
Способ начинается с запроса проверки (S1), была ли уже получена управляющая команда для инициирования новой процедуры получения изображения (такая, например, как сигнал включения мощности). Пока это не произошло, после заданного времени задержки процедура продолжается в контуре с этапа S1. Получив такую команду переключения, калибровочный фантом сканируется (S2) с каждого из упомянутых проекционных направлений, перемещая упомянутую рентгеновскую трубку и упомянутый рентгеновский детектор вдоль круговой траектории вокруг объекта, подлежащего визуализации и томографической реконструкции. Для каждого проекционного направления вычисляются (S3) трехмерное положение фокального пятна, по меньшей мере, одной рентгеновской трубки и трехмерное положение центра соответствующего, по меньшей мере, одного рентгеновского детектора (D) из полученных двумерных проекционных изображений. После этого трехмерные координаты эффективного центра вращения, вокруг которого вращается неидеальная изоцентрическая трехмерная вращательная рентгеновская сканирующая система, а также направленный вектор эффективной оси вращения определяются (S5, S5') из набора геометрических калибровочных данных, который получается как результат трехмерной калибровочной процедуры (S4), выполняемой на базе вычисленных трехмерных позиционных данных. После приема (S6) команды переключения для прекращения текущей процедуры получения изображения (такой как, например, сигнал выключения мощности), полученные двумерные проекционные изображения подвергаются процедуре трехмерной реконструкции (S7), которая использует вычисленные координаты эффективного центра вращения и/или вычисленного направленного вектора эффективной оси вращения для соответствующей коррекции, по существу, круговых кольцевых артефактов, которые, в противном случае, могут возникнуть из-за движения фокального пятна упомянутой рентгеновской трубки и упомянутого центра рентгеновского по неидеально изоцентрическим траекториям фокуса и детектора, соответственно, при вращении вокруг интересующего объекта во время упомянутой процедуры получения изображения. В противном случае, процедура продолжается снова с этапа S6 после истечения заданного времени задержки.
ПРИМЕНЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Настоящее изобретение и приведенные выше примеры вариантов осуществления могут применяться в объеме неидеально изоцентрических трехмерных вращательных рентгеновских сканирующих систем для использования в компьютерной томографии и, более точно, в объеме применения трехмерной реконструкции, используя процедуру трехмерной калибровки на основе фантома для выполнения алгоритма коррекции кольцевых артефактов, такого, который выполняется модулем коррекции кольцевых артефакта XperCT изделия Xtra Vision, редакция 6.2.2. Предложенный способ, таким образом, доказал, что он работает очень хорошо как при сканировании двигателем в диапазоне углов 200 градусов, так и при сканировании качанием в диапазоне углов 180 градусов.
Хотя настоящее изобретение было показано и описано подробно на чертежах и в приведенном выше описании, такой показ и описание следует считать иллюстративными или примерами, а не ограничениями, что означает, что изобретение не ограничивается раскрытыми вариантами осуществления. Другие изменения в раскрытых вариантах осуществления могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения, исходя из изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и единственное число не исключает множественное число. Простой факт, что определенные меры повторяются во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих критериев не может использоваться для достижения преимуществ. Компьютерная программа может храниться или распространяться на соответствующем носителе, таком как, например, оптический носитель данных или твердотельный носитель, предоставляемый вместе или как часть другого аппаратурного обеспечения, но может также распространяться в других формах, таких как, например, через Интернет или другие проводные или беспроводные системы связи. Любые позиционные обозначения в формуле изобретения не должны рассматриваться как ограничение объема изобретения.





Изобретение относится к трехмерным вращательным рентгеновским средствам получения изображения для использования в компьютерной томографии. Способ предварительной калибровки для предотвращения возникновения, по существу, круговых кольцевых артефактов при трехмерной реконструкции изображения в неидеальной изоцентрической трехмерной вращательной рентгеновской сканирующей системе состоит в сканировании калибровочного фантома при перемещении рентгеновской трубки и рентгеновского детектора вдоль неидеально круговой траектории, вычислении для каждого проекционного направления трехмерного положения фокального пятна рентгеновской трубки и трехмерного положения центра рентгеновского детектора из полученных двумерных проекционных изображений фантома, и определении из набора геометрических калибровочных данных, получаемых в результате процедуры трехмерной калибровки, выполняемой на основе вычисленных трехмерных позиционных данных, трехмерные координаты эффективного центра вращения, вокруг которого может считаться вращающейся неидеально изоцентрическая трехмерная вращательная рентгеновская сканирующая система. Трехмерная вращательная рентгеновская сканирующая система с C-образным кронштейном содержит блок калибровки для способа калибровки и дополнительно блок реконструкции для способа реконструкции. Считываемый компьютером носитель содержит команды, которые позволяют осуществлять калибровку и реконструкцию на трехмерной вращательной рентгеновской сканирующей системе. Для калибровки сканирующей системы или трехмерной реконструкции изображения применяют трехмерные координаты эффективного центра вращения. Использование изобретения позволяет улучшить качество изображения за счет облегчения коррекции кольцевых круговых артефактов. 7 н. и 7 з.п. ф-лы, 5 ил.
1. Способ предварительной калибровки для предотвращения возникновения, по существу, круговых кольцевых артефактов (RA1, RA2, RA3, RA4, RA5), при трехмерной реконструкции изображения, основанной на наборе рентгенографических двумерных проекционных изображений, получаемых с множества различных проекционных направлений неидеальной изоцентрической трехмерной вращательной рентгеновской сканирующей системой, снабженной, по меньшей мере, одной рентгеновской трубкой (S) и, по меньшей мере, одним сопутствующим рентгеновским детектором (D), расположенным диаметрально относительно упомянутой рентгеновской трубки (S), причем упомянутый способ предварительной калибровки содержит этапы, на которых
- сканируют (S2) калибровочный фантом с каждого из упомянутых проекционных направлений при перемещении каждого из упомянутых рентгеновской трубки (S) и рентгеновского детектора (D) вдоль неидеально круговой траектории (TF, ТCD) вокруг фантома,
- для каждого проекционного направления вычисляют (S3) трехмерное положение (РF) фокального пятна, по меньшей мере, одной рентгеновской трубки и трехмерного положения центра (РCD) сопутствующего, по меньшей мере, одного рентгеновского детектора (D) из полученных двумерных проекционных изображений фантома, и
- определяют (S5) из набора геометрических калибровочных данных, получаемых в результате процедуры трехмерной калибровки (S4), выполняемой на основе вычисленных трехмерных позиционных данных, трехмерные координаты эффективного центра вращения (MRC,  или
или  '), вокруг которого может считаться вращающейся неидеально изоцентрическая трехмерная вращательная рентгеновская сканирующая система.
'), вокруг которого может считаться вращающейся неидеально изоцентрическая трехмерная вращательная рентгеновская сканирующая система.
2. Способ предварительной калибровки по п.1, в котором упомянутая трехмерная процедура (S4) калибровки основана на алгоритме круговой регрессии, который вычисляет положение центра (MRC, ) и радиус (rRC) окружности регрессии (RC), наилучшим образом подобранной к двумерной проекции, по существу, кругового кольцевого артефакта (RA), который получается при сканировании упомянутого калибровочного фантома с каждого из упомянутых проекционных направлений и проецировании вычисленных трехмерных положений (PF) фокального пятна рентгеновской трубки и трехмерных положений (PCD) центра рентгеновского детектора (D) на проекционную плоскость, в которой лежит упомянутая окружность (RC) регрессии.
3. Способ предварительной калибровки по п.2, в котором упомянутый алгоритм круговой регрессии содержит подбор методом наименьших квадратов, дающим в результате окружность, наилучшим образом подобранную к набору точек (◇), образующему, по существу, круговой кольцевой артефакт (RA), которые указывают трехмерные положения, полученные посредством деления каждой линии, соединяющей положение (PF) фокального пятна, по меньшей мере, одной рентгеновской трубки и положение (PCD) центра сопутствующего, по меньшей мере, одного рентгеновского детектора (D) в соответствии с заданным отношением деления (χn).
4. Способ предварительной калибровки по п.3, в котором упомянутое отношение деления (χn) определяется для каждого из упомянутых проекционных направлений показателем расстояния между мгновенным положением (PF(t=tn)) фокального пятна, по меньшей мере, одной рентгеновской трубки и текущим положением центра вращения для конкретного проекционного угла в соответствующее время (tn) получения изображения и расстояния между мгновенным положением (-РCD(t=tn)) центра упомянутого, по меньшей мере, одного рентгеновского детектора (D) и текущим центром вращения для этого проекционного угла в этот момент времени (tn).
5. Способ предварительной калибровки по любому из пп.2-4, в котором положение (MRC) центра результирующей окружности регрессии (RC), вычисленное посредством трехмерной калибровочной процедуры, интерпретируется как эффективный центр вращения () в проекционной плоскости, по существу, кругового кольцевого артефакта (RA) при реконструкции интересующего объекта из полученного набора рентгенографических двумерных проекционных изображений.
6. Способ предварительной калибровки по любому из пп.2-4, в котором направление вектора, перпендикулярное к плоскости результирующей окружности регрессии (RC), при реконструкции интересующего объекта из полученного набора рентгенографических двумерных проекционных изображений интерпретируется как направленный вектор эффективной оси вращения (LAA или PA).
7. Способ предварительной калибровки по п.1, в котором направленный вектор эффективной оси вращения (LAA или РА) вычисляется на основе оптимизации методом наименьших квадратов для подбора набора точек, причем упомянутые точки состоят из заданного количества дискретных точек (PF(t=tn)) в различных угловых положениях фокального пятна, по меньшей мере, одной рентгеновской трубки на траектории (ТF) фокального пятна и соответствующего количества дискретных точек (PCD(t=tn)) в диаметрально противоположных положениях центра, по меньшей мере, одного рентгеновского детектора на траектории (TCD) детектора для набора дискретных времен получения изображения (tn) при получении упомянутого набора рентгенографических двумерных проекционных изображений с упомянутого количества различных проекционных направлений, в окружности регрессии (RC), и интерпретирует нормальный вектор ( ) на плоскости (E) результирующей окружности регрессии как направленный вектор эффективной оси вращения (LAA или PA).
) на плоскости (E) результирующей окружности регрессии как направленный вектор эффективной оси вращения (LAA или PA).
8. Способ предварительной калибровки по п.7, в котором эффективный центр вращения () вычисляется как точка, расположенная между плоскостью траектории фокального пятна, по меньшей мере, одной рентгеновской трубки и плоскостью траектории центра, по меньшей мере, одного сопутствующего рентгеновского детектора, причем упомянутая точка лежит в направлении упомянутого нормального вектора (), а именно, на расстоянии до упомянутой плоскости траектории фокуса и упомянутой плоскости траектории детектора, для которых отношение расстояний равно упомянутому отношению деления (χn).
9. Способ томографической реконструкции интересующего объекта из набора рентгенографических двумерных проекционных изображений, полученных с множества различных проекционных направлений неидеально изоцентрической трехмерной вращательной рентгеновской сканирующей системой, содержащей, по меньшей мере, одну рентгеновскую трубку (S) и, по меньшей мере, один сопутствующий рентгеновский детектор (D), установленный диаметрально относительно упомянутой рентгеновской трубки (S), причем упомянутые изображения получаются при движении упомянутой рентгеновской трубки (S) и упомянутого рентгеновского детектора (D) вдоль двух круговых траекторий вокруг упомянутого объекта,
причем упомянутый способ содержит способ предварительной калибровки для предотвращения возникновения, по существу, круговых кольцевых артефактов (RA1, RA2, RA3, RA4, RA5), причем способ предварительной калибровки является способом по любому из пп.1-8.
10. Трехмерная вращательная рентгеновская сканирующая система на основе C-образного кронштейна для использования в компьютерной томографии, не являющаяся идеально изоцентрической, содержащая блок калибровки, выполненный с возможностью осуществления способа калибровки, изложенного в любом из пп.1-8.
11. Трехмерная вращательная рентгеновская сканирующая система на основе C-образного кронштейна по п.10, содержащая блок реконструкции, взаимодействующий с упомянутым блоком калибровки, в которой упомянутый блок реконструкции выполнен с возможностью осуществления способа реконструкции, как указано в п.9.
12. Считываемый компьютером носитель, содержащий сохраненную на нем программу программного обеспечения, причем программа программного обеспечения содержит команды, которые, при осуществлении и выполнении на блоке калибровки для калибровки трехмерной вращательной рентгеновской системы получения изображения на основе C-образного кронштейна по п.10, предписывают блоку калибровки исполнять способ по любому из пп.1-8.
13. Считываемый компьютером носитель, содержащий сохраненную на нем программу программного обеспечения, причем программа программного обеспечения содержит команды, которые, при осуществлении и выполнении на блоке реконструкции трехмерной вращательной рентгеновской сканирующей системы на основе C-образного кронштейна по п.11, предписывают блоку реконструкции исполнять способ по п.9.
14. Применение для калибровки трехмерной вращательной рентгеновской сканирующей системы на основе C-образного кронштейна или для трехмерной реконструкции изображения трехмерных координат эффективного центра вращения (MRC, или '), как определено на этапе предварительной калибровки по любому из пп.1-8.
| US2004252811 A1, 16.12.2004 | |||
| US 2003063709 A1, 03.04.2003 | |||
| US 2008019607 A1, 24.01.2008 | |||
| US 2006159363 A1, 20.07.2006 | |||
| US 2005094771 A1, 05.05.2005 | |||
| US 6049582 A, 11.04.2000 | |||
| US 6466638 B1, 15.10.2002 | |||
| RU 2004123489 A, 27.02.2006 |

