ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и, в различных конструкциях, к хирургическим режущим и сшивающим инструментам и кассетам со скобками для них, которые выполнены с возможностью разрезания и сшивания ткани скобками.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Хирургические сшивающие инструменты часто применяют для размещения скоб в мягких тканях для уменьшения или устранения кровотечения из мягких тканей, в особенности, например, при рассечении ткани. Такие хирургические сшивающие устройства, как, например, эндокатер, имеют концевой эффектор, который может двигаться или поворачиваться относительно блока удлиненного ствола. Концевые эффекторы зачастую выполняются с возможностью фиксации мягких тканей между первой и второй браншей, причем первая бранша часто включает в себя кассету со скобками, выполненный с возможностью хранения в нем и извлечения из него скобок, а вторая бранша часто включает упорный элемент. Такие хирургические сшивающие устройства включают эффекторную систему для поворота упорного элемента относительно кассеты со скобками.
Хирургические сшивающие инструменты, как кратко описано выше, могут быть выполнены с возможностью поворота упора концевого эффектора относительно кассеты со скобками с целью захвата мягкой ткани между ними. В различных обстоятельствах упор может быть выполнен с возможностью приложения сжимающего усилия к мягкой ткани с целью удержания мягкой ткани между упором и кассетой со скобками. Однако если хирурга не удовлетворяет положение концевого эффектора, хирург, как правило, должен активировать механизм высвобождения на хирургическом сшивающем инструменте для поворота упора в открытое положение, а затем изменить положение концевого эффектора. После этого, как правило, скобы размещаются из кассеты со скобками при помощи выталкивателя, который проходит сквозь канал в кассете со скобками, что вызывает деформирование скоб об упор и закрепляет вместе слои мягкой ткани. Как известно специалистам в данной области, для более надежного скрепления слоев ткани скобы часто накладывают в несколько линий, или рядов. Концевой эффектор может также включать режущий инструмент, например, нож, который выдвигается между двух рядов скоб для иссечения мягкой ткани после сшивания скобками слоев мягкой ткани.
Такие хирургические сшивающие инструменты и эффекторы могут быть по форме и размеру выполнены с возможностью вставки их в полость тела через троакар или другое отверстие для доступа. Концевой эффектор, как правило, соединен с удлиненным стволом, размер которого позволяет ему проходить через троакар или отверстие. Узел удлиненного ствола часто функционально соединен с рукояткой, которая поддерживает системы управления и/или спусковые механизмы, предназначенные для управления работой концевого эффектора. Чтобы облегчить правильное размещение и ориентирование концевого эффектора внутри тела, многие хирургические инструменты выполнены с возможностью облегчения шарнирного поворота концевого эффектора относительно части удлиненного ствола.
Изложенное выше описание предназначено лишь для демонстрации различных аспектов соответствующей технологии в области применения изобретения на данный момент, и его не следует рассматривать как ограничение объема формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Особенности и преимущества настоящего изобретения, а также способ их достижения станут более очевидными, а само изобретение станет более понятным после ознакомления со следующим описанием вариантов осуществления настоящего изобретения в сочетании с сопроводительными рисунками, причем:
на ФИГ. 1 представлен вид в перспективе хирургического сшивающего инструмента согласно одной форме настоящего изобретения;
на ФИГ. 2 представлен еще один вид в перспективе хирургического инструмента, изображенного на ФИГ. 1 с удаленной частью корпуса рукоятки;
на ФИГ. 3 представлен общий вид с пространственным разделением компонентов одной конструкции эффектора настоящего изобретения;
на ФИГ. 4 представлен частичный вид в поперечном сечении части концевого эффектора и узла удлиненного ствола хирургического инструмента, изображенного на ФИГ. 1 и 2, с узлом упора в открытом положении;
на ФИГ. 5 представлен еще один частичный вид в поперечном сечении концевого эффектора и узла удлиненного ствола, изображенного на ФИГ. 4, с узлом упора в закрытом положении перед пуском;
на ФИГ. 6 представлен еще один частичный вид в поперечном сечении концевого эффектора и узла удлиненного ствола, изображенного на ФИГ. 4 и 5, после проперемещения режущего ткань элемента в самое дистальное положение внутри концевого эффектора;
на ФИГ. 7 представлен вид в перспективе конструкции узла соединительного элемента настоящего изобретения;
на ФИГ. 8 представлен общий вид с пространственным разделением компонентов узла соединительного элемента, изображенного на ФИГ. 7;
на ФИГ. 9 представлен вид в перспективе проксимального конца концевого эффектора и дистального конца узла удлиненного ствола и присоединенного к нему узла соединительного элемента;
на ФИГ. 10 представлен вид в вертикальной проекции проксимального конца концевого эффектора, изображенного на ФИГ. 9;
на ФИГ. 11 представлен вид в вертикальной проекции дистального конца узла соединительного элемента, изображенного на ФИГ. 9;
на ФИГ. 12 представлен общий вид в перспективе части концевого эффектора и узла удлиненного ствола перед присоединением к нему концевого эффектора;
на ФИГ. 13 представлен еще один вид в перспективе части концевого эффектора и конструкции узла удлиненного ствола после того, как концевой эффектор вошел в первичное зацепление с частью узла соединительного элемента на узле удлиненного ствола;
на ФИГ. 14 представлен еще один вид в перспективе компонентов, показанных на ФИГ. 13, после того как концевой эффектор был соединен с частью узла соединительного элемента на узле удлиненного ствола;
на ФИГ. 15 представлен вид в перспективе конструкции устройства управления шарниром настоящего изобретения;
на ФИГ. 16 представлен вид в перспективе части конструкции сегмента шарнирного ствола;
на ФИГ. 17 представлен вид в перспективе с пространственным разделением компонентов конструкции шарнирного сочленения настоящего изобретения;
на ФИГ. 18 представлен вид в перспективе конструкции шарнирного сочленения, изображенного на ФИГ. 17;
на ФИГ. 19 представлен вид сверху конструкции шарнирного сочленения, изображенного на ФИГ. 17 и 18;
на ФИГ. 20 представлен вид в поперечном сечении компонентов, изображенных на ФИГ. 19;
на ФИГ. 21 представлен еще один вид в поперечном сечении шарнирного сочленения, изображенного на ФИГ. 19 и 20;
на ФИГ. 22 представлен еще один вид в поперечном сечении шарнирного сочленения, изображенного на ФИГ. 21, в шарнирно повернутом положении;
на ФИГ. 23 представлен вид в перспективе конструкции пусковой системы настоящего изобретения;
на ФИГ. 24 представлен вид в перспективе конструкции системы вращения концевого эффектора настоящего изобретения;
на ФИГ. 25 представлен вид в перспективе части шарнирного сочленения и узла соединительного элемента настоящего изобретения;
на ФИГ. 26 представлен вид в перспективе конструкции системы вращения ствола настоящего изобретения;
на ФИГ. 27 представлен вид в перспективе с пространственным разделением компонентов хирургического инструмента, изображенного на ФИГ. 1 и 2;
на ФИГ. 28 представлен вид в перспективе с пространственным разделением компонентов конструкции отсоединяемого приводного патрона настоящего изобретения;
на ФИГ. 28A представлен вид с торца в вертикальной проекции части конструкции отсоединяемого приводного патрона, изображенного на ФИГ. 28, присоединенного к конструкции монтажного узла двигателей;
на ФИГ. 28B представлен вид в перспективе части конструкции отсоединяемого приводного патрона и конструкции монтажного узла двигателей, изображенного на ФИГ. 28A;
на ФИГ. 29 представлен вид в поперечном сечении части конструкции узла рукоятки;
на ФИГ. 30 представлен общий вид с пространственным разделением компонентов отсоединяемого приводного патрона и монтажного узла двигателей внутри частей корпуса рукоятки;
на ФИГ. 31 представлен общий вид с пространственным разделением компонентов конструкции монтажного узла двигателей;
на ФИГ. 32 представлен еще один общий вид в поперечном сечении с пространственным разделением компонентов отсоединяемого приводного патрона и монтажного узла двигателей внутри частей корпуса рукоятки;
на ФИГ. 33 представлен вид сбоку в вертикальной проекции части узла рукоятки, где для ясности исключены различные компоненты;
на ФИГ. 34 представлен вид снизу в перспективе механизма переключателя настоящего изобретения;
на ФИГ. 35 представлен общий вид с пространственным разделением компонентов механизма переключателя, изображенного на ФИГ. 34;
на ФИГ. 36 представлен вид в поперечном сечении части механизма переключателя, изображенного на ФИГ. 34 и 35, смонтированного с узлом рукоятки, причем управляющая часть джойстика находится в неактивированном положении;
на ФИГ. 37 представлен еще один вид в поперечном сечении механизма переключателя, изображенного на ФИГ. 36, причем управляющая часть джойстика находится в активированном положении;
на ФИГ. 38 представлен вид сбоку в поперечном сечении механизма переключателя, изображенного на ФИГ. 36;
на ФИГ. 39 представлен вид сбоку в поперечном сечении механизма переключателя, изображенного на ФИГ. 37;
на Фиг. 40 представлен вид сбоку в вертикальной проекции механизма переключателя, изображенного на ФИГ. 34-39;
на ФИГ. 41 представлен вид спереди в вертикальной проекции механизма переключателя, изображенного на ФИГ. 34-40;
на ФИГ. 42 представлен еще один общий вид с пространственным разделением компонентов механизма переключателя, изображенного на ФИГ. 34-41;
на ФИГ. 43 представлен вид сзади в вертикальной проекции механизма управляющего узла с лопастной поворотной ручкой в активированном положении;
на ФИГ. 44 представлен еще один вид сзади в вертикальной проекции механизма управляющего узла с лопастной поворотной ручкой в другом активированном положении;
на ФИГ. 45 представлен еще один частичный вид в поперечном сечении конструкций концевого эффектора и узла удлиненного ствола;
на ФИГ. 46 представлен увеличенный вид в поперечном сечении части конструкции шарнирного сочленения и конструкции узла соединительного элемента с соединенным с ним концевым эффектором;
на ФИГ. 47 представлен вид в перспективе конструкции узла рукоятки, причем часть корпуса рукоятки исключена;
на ФИГ. 48 представлен увеличенный вид в перспективе части узла рукоятки, демонстрирующий конструкцию соединения проводников;
на ФИГ. 49 представлен вид в перспективе с пространственным разделением компонентов части конструкции другого узла соединительного элемента и конструкции шарнирного сочленения;
на ФИГ. 50 представлен вид в перспективе другой конструкции шарнирного сочленения настоящего изобретения;
на ФИГ. 51 представлен общий вид с пространственным разделением компонентов конструкции шарнирного сочленения, изображенного на ФИГ. 50;
на ФИГ. 52 представлен вид в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 50 и 51;
на ФИГ. 53 представлен еще один вид в поперечном сечении в перспективе конструкции шарнирного сочленения, изображенного на ФИГ. 50-52;
на ФИГ. 54 представлен вид в перспективе другой конструкции шарнирного сочленения настоящего изобретения;
на ФИГ. 55 представлен общий вид с пространственным разделением компонентов конструкции шарнирного сочленения, изображенного на ФИГ. 54;
на ФИГ. 56 представлен частичный вид в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 54 и 55;
на ФИГ. 57 представлен еще один частичный вид в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 54-56;
на ФИГ. 58 представлен еще один частичный вид в перспективе в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 54-57;
на ФИГ. 59 представлен еще один частичный вид в перспективе в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 54-58, с сочленением в шарнирно повернутой ориентации;
на ФИГ. 60 представлен еще один частичный вид в перспективе в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 54-59, с сочленением в другой шарнирно повернутой ориентации;
на ФИГ. 61 представлен вид в перспективе другой конструкции шарнирного сочленения настоящего изобретения;
на ФИГ. 62 представлен еще один вид в перспективе конструкции шарнирного сочленения, изображенного на ФИГ. 60, в шарнирно повернутой ориентации;
на ФИГ. 63 представлен общий вид с пространственным разделением компонентов шарнирного сочленения, изображенного на ФИГ. 61 и 62;
на ФИГ. 64 представлен вид в поперечном сечении конструкции шарнирного сочленения, изображенного на ФИГ. 61-63;
на ФИГ. 65 представлен еще один вид в поперечном сечении в перспективе конструкции шарнирного сочленения, изображенного на ФИГ. 61-64;
на ФИГ. 66 представлен еще один вид в поперечном сечении в перспективе конструкции шарнирного сочленения, изображенного на ФИГ. 61-65, в шарнирно повернутой ориентации;
на ФИГ. 67 представлен вид в перспективе другой конструкции монтажного узла двигателей настоящего изобретения;
на ФИГ. 68 представлен вид спереди в вертикальной проекции конструкции монтажного узла двигателей, изображенного на ФИГ. 67;
на ФИГ. 69 представлен общий вид с пространственным разделением компонентов конструкции монтажного узла двигателей, изображенного на ФИГ. 67 и 68;
на ФИГ. 70 представлен вид в перспективе некоторых форм электрохирургического концевого эффектора для применения с хирургическим инструментом;
на ФИГ. 71 представлен вид в перспективе некоторых форм концевого эффектора, изображенного на ФИГ. 70, с закрытыми браншами и с дистальным концом элемента, выполненного с возможностью перемещения по оси, в частично продвинутом положении;
на ФИГ. 72 представлен вид в перспективе некоторых форм элемента, выполненного с возможностью перемещения по оси, концевого эффектора, изображенного на ФИГ. 70;
на ФИГ. 73 представлен вид в сечении некоторых форм концевого эффектора, изображенного на ФИГ. 70;
на ФИГ. 74 и 75 представлена одна форма ультразвукового концевого эффектора для применения с хирургическим инструментом;
на ФИГ. 76 и 77 представлены дополнительные виды одной формы элемента, выполненного с возможностью перемещения по оси, концевого эффектора, изображенного на ФИГ. 74;
на ФИГ. 78 представлена одна форма линейного концевого эффектора со скобками, пригодного для применения с хирургическим инструментом;
на ФИГ. 79 представлена одна форма кругового концевого эффектора со скобками, пригодного для применения с хирургическим инструментом;
на ФИГ. 80 представлено несколько примеров шнуров питания для применения с хирургическим инструментом;
на ФИГ. 81 представлено несколько примеров стволов, пригодных для применения с хирургическим инструментом;
на ФИГ. 82 представлена блок-схема узла рукоятки хирургического инструмента с указанием различных управляющих элементов;
на ФИГ. 83 представлена одна форма из различных инструментов концевого эффектора, содержащая схемы, описанные в настоящем документе;
на ФИГ. 84 представлена блок-схема, показывающая одну форму конфигурации управления, реализуемую управляющей схемой, для управления хирургическим инструментом;
на ФИГ. 85 представлена структурная схема одного примера выполнения процесса, реализующего алгоритм управления, показанный на ФИГ. 84;
на ФИГ. 86 представлена блок-схема, показывающая другую форму конфигурации управления, реализуемую управляющей схемой, для управления хирургическим инструментом;
на ФИГ. 87 представлена структурная схема одного примера выполнения процесса, реализующего алгоритм управления, показанный на ФИГ. 86;
на ФИГ. 88 представлена одна форма хирургического инструмента, содержащего ретрансляционную станцию в рукоятке;
на ФИГ. 89 представлена одна форма концевого эффектора с модулем датчика в нем, выполненного с возможностью передачи сигнала;
на ФИГ. 90 представлена блок-схема, демонстрирующая одну форму модуля датчика;
на ФИГ. 91 представлена блок-схема, демонстрирующая одну форму ретрансляционной станции;
на ФИГ. 92 представлена блок-схема, демонстрирующая одну форму ретрансляционной станции, выполненную с возможностью преобразования принятого сигнала низкой мощности;
на ФИГ. 93 представлена структурная схема одной формы для способа ретрансляции сигнала, указывающего состояние концевого эффектора;
на ФИГ. 94 представлена дистальная часть инструмента, содержащая механический упор, как изображено на ФИГ. 1, в соответствии с некоторыми аспектами, описанными в настоящем документе;
на ФИГ. 95 представлена схема системы, приспособляемой к применению с электромеханическим упором, содержащей источник питания, систему управления и приводной двигатель, в соответствии с некоторыми аспектами, описанными в настоящем документе;
на ФИГ. 96 представлено графическое изображение, показывающее временное изменение тока, связанного с инструментом, содержащим электромеханический упор без мягкого упора, в соответствии с некоторыми аспектами, описанными в настоящем документе;
на ФИГ. 97 представлена дистальная часть инструмента, оснащенная механическим упором, содержащим мягкий упор, в которой приводной элемент перемещается в положение перед контактом с мягким упором во втором положении конца такта, в соответствии с некоторыми аспектами, описанными в настоящем документе;
на ФИГ. 98 представлен инструмент, изображенный на ФИГ. 97, в котором приводной элемент перемещается через первое положение конца такта во второе положение конца такта, в соответствии с некоторыми аспектами, описанными в настоящем документе;
на ФИГ. 99 представлено графическое изображение, показывающее временное изменение тока, связанного с инструментом, содержащим электромеханический упор с мягким упором, в соответствии с некоторыми аспектами, описанными в настоящем документе;
на ФИГ. 100 представлен вид в перспективе альтернативного монтажного узла двигателей, который использует узел шестереночного приводного патрона;
на ФИГ. 101 представлен еще один вид в перспективе монтажного узла двигателей, изображенного на ФИГ. 100, в котором корпус дистального ствола для ясности исключен;
на ФИГ. 102 представлен еще один вид в перспективе монтажного узла двигателей, изображенного на ФИГ. 100 и 101;
на ФИГ. 103 представлен вид в поперечном сечении монтажного узла двигателей, изображенного на ФИГ. 100-102;
на ФИГ. 104 представлен вид сверху монтажного узла двигателей, изображенного на ФИГ. 100-103;
на ФИГ. 105 представлена одна форма хирургического инструмента, содержащая концевой эффектор, выпрямляемый с помощью датчика, в шарнирно повернутом состоянии;
на ФИГ. 106 представлен хирургический инструмент, изображенный на ФИГ. 105, в выпрямленном состоянии;
на ФИГ. 107 представлена одна форма концевого эффектора, выпрямляемого с помощью датчика, вставленного в хирургическую внешнюю трубку;
на ФИГ. 108 представлена одна форма концевого эффектора, выпрямляемого с помощью датчика, вставленного в хирургическую внешнюю трубку, в шарнирно повернутом состоянии;
на ФИГ. 109 представлена одна форма концевого эффектора, выпрямляемого с помощью датчика, в шарнирно повернутом состоянии;
на ФИГ. 110 представлена одна форма концевого эффектора, выпрямляемого с помощью датчика, изображенного на с ФИГ. 109, в выпрямленном состоянии;
на ФИГ. 111 представлена одна форма магнитного кольца для применения с концевым эффектором, выпрямляемым при помощи датчика;
на ФИГ. 112 представлена одна форма концевого эффектора, выпрямляемого с помощью датчика, содержащего магнитный датчик;
на ФИГ. 113 представлена одна форма магнитного датчика с язычковым контактом;
на ФИГ. 114 представлена одна форма модульной платформы управления двигателем;
на ФИГ. 115 представлена одна форма модульной платформы управления двигателем, содержащей множество пар из двигателя и контроллера;
на ФИГ. 116 представлена одна форма модульной платформы управления двигателем, содержащей главный контроллер и ведомый контроллер;
на ФИГ. 117 представлена одна форма управляющего процесса, реализуемого хирургическим инструментом, управляемым множеством двигателей.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
- заявка на патент США, озаглавленная «Хирургические инструменты с вращательным приводом, имеющие множество степеней свободы», досье патентного поверенного № END7195USNP/120287;
- заявка на патент США, озаглавленная «Шарнирно поворачиваемый хирургический инструмент с проводящими путями для сигнала связи», досье патентного поверенного № END7187USNP/120279;
- заявка на патент США, озаглавленная «Механизм переключателя поворотных ручек для хирургических инструментов», досье патентного поверенного № END7189USNP/120281;
- заявка на патент США, озаглавленная «Джойстиковые узлы переключателей для хирургических инструментов», досье патентного поверенного № END7192USNP/120284;
- заявка на патент США, озаглавленная «Электромеханические мягкие упоры для хирургических инструментов», досье патентного поверенного № END7196USNP/120288;
- заявка на патент США, озаглавленная «Электромеханическое хирургическое устройство с конструкцией для ретрансляции сигнала», досье патентного поверенного № END7190USNP/120282;
- заявка на патент США, озаглавленная «Концевой эффектор, выпрямляемый при помощи датчика во время извлечения через троакар», досье патентного поверенного № END7193USNP/120285;
- заявка на патент США, озаглавленная «Многопроцессорное управление двигателем для модульного хирургического устройства», досье патентного поверенного № END7091USNP/120283; и
- заявка на патент США, озаглавленная «Способы управления хирургическими инструментами со съемными рабочими частями», досье патентного поверенного № END7194USNP/120286.
Для обеспечения полного понимания принципов работы конструкции, функционирования, производства и применения устройств и способов, описанных в настоящем документе, приводится описание некоторых примеров осуществления. Один или более примеров данных вариантов осуществления показаны на сопроводительных рисунках. Обычным специалистам в данной области будет понятно, что устройства и способы, конкретно описанные в настоящем документе и проиллюстрированные на сопроводительных рисунках, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных вариантов осуществления настоящего изобретения определен только формулой изобретения. Особенности, показанные или описанные в связи с одним примером осуществления, можно комбинировать с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и варианты.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» и «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий»), «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») представляют собой неограниченные связующие глаголы. В результате хирургическая система или устройство, которое «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами. Аналогично элемент системы или устройства, который «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами.
В настоящем документе термины «проксимальный» и «дистальный» применяются со ссылкой на врача, манипулирующего частью рукоятки хирургического инструмента. Термин «проксимальный» относится к части, размещенной ближе всего к врачу, а термин «дистальный» относится к части, размещенной в стороне от врача. Также следует понимать, что для удобства и ясности в настоящем документе в отношении рисунков могут применяться пространственные термины, такие как «вертикальный», «горизонтальный», «верх» и «низ». Но поскольку хирургические инструменты используются во множестве ориентаций и положений, данные термины не следует толковать как ограничивающие и/или абсолютные.
Предложены различные примеры устройств и способов проведения лапароскопических и минимально инвазивных хирургических вмешательств. Однако обычному специалисту в данной области будет понятно, что различные способы и устройства, описанные в настоящем документе, можно использовать для проведения множества хирургических вмешательств и во многих сферах применения, включая, например, сферы, связанные с проведением «открытых» хирургических вмешательств. По ходу настоящего подробного описания специалисты в данной области смогут дополнительно оценить, что разнообразные инструменты, описанные в настоящем документе, можно вставлять в тело любым способом - через естественное отверстие, через надрез или пункционное отверстие, сделанное в ткани, и т. п. Рабочие части или части концевого эффектора инструментов можно вставлять в тело пациента либо непосредственно, либо через устройство доступа, имеющее рабочий канал, через который можно продвинуть концевой эффектор и удлиненный ствол хирургического инструмента.
Обращаясь к рисункам, на которых одинаковые номера обозначают одинаковые компоненты на нескольких видах, на ФИГ. 1-3 представлен хирургический инструмент 10, способный передавать пусковые перемещения на функционально соединенную с ним рабочую часть 100. Как будет описано ниже более подробно, инструмент 10 можно эффективно применять к ряду разнообразных инструментов, которые можно взаимозаменяемо соединять с инструментом 10. Конструкция, изображенная на ФИГ. 1 и 2, например, показана соединенной с концевым эффектором 102, выполненным с возможностью разрезания и сшивания скобками ткани. Однако посредством инструмента 10 также можно управлять инструментами с другими конструкциями.
Концевой эффектор
102, изображенный на ФИГ. 1-6, включает удлиненный элемент 110 с каналом, который может быть выполнен с возможностью функционального и съемного поддержания кассеты 130 со скобками. Кассета 130 со скобками может включать в себя верхнюю поверхность или платформу 132 кассеты, которая включает в себя множество углублений 134 для скобок, расположенных линиями в шахматном порядке с каждой стороны удлиненного паза 136. См. ФИГ. 3. Множество хирургических скоб 140 поддерживаются на соответствующих выталкивателях 138 скобок, которые функционально поддерживаются внутри углублений 134 для скоб. Как видно также на ФИГ. 3, в одной форме концевой эффектор 102 включает концевое основание 150, выполненное с возможностью соединения с проксимальным концом кассеты 130 со скобками и установленное внутри проксимального конца удлиненного канала 110. Например, концевое основание 150 может быть образовано с дистально направленными язычками-фиксаторами 152, выполненными для введения в соответствующие фиксаторные пазы 142 в платформе 132 кассеты. Кроме того, концевое основание 150 может быть оснащено латерально направленными крепежными выступами 154 для присоединения концевого основания 150 к удлиненному каналу 110. Например, крепежные выступы 154 могут быть выполнены с возможностью приема в соответствующие крепежные отверстия 112 в удлиненном канале 110.
В одной форме концевое основание 150 включает центрально расположенный паз 156, выполненный с возможностью поддерживания режущего ткань элемента 160 и салазок 170. Режущий ткань элемент 160 может включать часть 162 кожуха, на которой выполнена или иным образом прикреплена режущая ткань часть 164. Часть 162 кожуха может быть насажена посредством резьбы на приводной винт 180 концевого эффектора, закрепленный с возможностью поворота внутри удлиненного канала 110. Салазки 170 поддерживаются с возможностью перемещения по оси относительно приводного винта 180 концевого эффектора и могут быть выполнены с возможностью взаимодействия с частью 162 кожуха режущего ткань элемента 160. При выталкивании дистально режущего ткань элемента 160, салазки 170 выталкиваются дистально режущим ткань элементом 160. При выталкивании дистально салазок 170 клинья 172, образованные на них, служат для проперемещения вверх выталкивателей 138 внутри кассеты 130 со скобками.
Концевой эффектор 102 дополнительно может включать узел 190 упора, поддерживаемый с возможностью избирательного перемещения относительно кассеты 130 со скобками. По меньшей мере в одной форме узел 190 упора может содержать первую часть 192 упора, соединенную с задней частью 194 упора и верхней частью 196 упора. Задняя часть 194 упора может иметь пару латерально выступающих опорных роликов 198, выполненных с возможностью приема в соответствующие роликам отверстия или полости 114 в удлиненном канале 110, с целью обеспечения вращательного перемещения или перемещения с возможностью перемещения узла 190 упора относительно удлиненного канала 110 и поддерживаемой в нем кассеты 130 со скобками.
Разрезающий ткань элемент 160 может быть оснащен парой латерально выступающих приводных язычков 166, выполненных с возможностью скользящего приема внутрь пазов 199 в узле 190 упора. Кроме того, разрезающий ткань элемент 160 дополнительно может иметь башмак 168, размер которого позволяет ему зацепляться с нижней частью удлиненного канала 110, так чтобы при выталкивании дистально разрезающего ткань элемента 160 язычки 166 и башмак 168 заставляли узел 190 упора перемещаться в закрытое положение. Язычки 166 и башмак 168 могут служить для разделения узла 190 упора и кассеты 130 со скобками на нужное расстояние в процессе разрезания и сшивания ткани. На первой части 192 упора может находиться формирующая скобки нижняя часть 193 для формирования хирургических скоб 140, когда они выталкиваются в контакте с ней. На ФИГ. 4 показано положение узла 190 упора и режущего элемента 160, когда узел 190 упора находится в открытом положении. На ФИГ. 5 показано положение узла 190 упора и режущего элемента 160 после закрытия упора 190, но до того как режущий ткань элемент 160 будет продвинут дистально или будет «активирован». На ФИГ. 6 показано положение режущего ткань элемента 160 после его продвижения в самое дистальное положение внутри кассеты 130 со скобками.
Приводной винт 180 концевого эффектора может поддерживаться с возможностью поворота внутри удлиненного канала 110. Например, в одной форме приводной винт 180 концевого эффектора может иметь проксимальный конец 182, соединенный с крепежным элементом 184 приводного ствола, который выполнен с возможностью стыковки с узлом 200 соединительного элемента. Крепежный элемент 184 приводного ствола может быть выполнен с возможностью прикрепления к проксимальному концу 182 приводного винта 180 концевого эффектора. Например, крепежный элемент 184 приводного ствола может иметь направленный от него шестигранный выступ 186, выполненный для вставки без возможности поворота в соответствующее шестигранное гнездо, представляющее собой часть пусковой системы, по существу обозначенной как элемент 500. Поворот приводного винта 180 концевого эффектора в первом направлении заставляет режущий ткань элемент 160 перемещаться в дистальном направлении. В различных формах кассета 130 со скобками может быть оснащена парой амортизаторов 174, которые служат для амортизации салазок 170 при достижении ими самого дистального положения внутри удлиненного канала 110. Каждый из амортизаторов 174 может иметь пружину 176 для придания амортизатору нужной амортизирующей способности.
Узел соединительного элемента концевого эффектора
Различные формы инструментов 100 можно функционально присоединять к хирургическому инструменту 10 посредством узла 200 соединительного элемента. Одна форма узла 200 соединительного элемента показана на ФИГ. 7-14. Узел 200 соединительного элемента может включать корпусную часть 202 соединительного элемента, выполненную с возможностью функционального поддерживания узла приводных шестерен, в совокупности обозначенного как элемент 220. По меньшей мере в одной форме узел приводных шестерен 220 включает входную шестерню 222, передаточную шестерню 228 и выходную шестерню 232. См. ФИГ. 8. Входная шестерня 222 установлена или образована на входном стволе 224, поддерживаемом с возможностью поворота первым и вторым элементами-перегородками 204, 206. Входной ствол 224 имеет проксимальный конец 226, выполненный с возможностью сопряжения с дистальным сегментом 510 пускового ствола, являющимся частью уникальной новой пусковой системы 500, которая будет более подробно описана ниже. Например, проксимальный конец 226 может быть выполнен с шестигранной формой поперечного сечения для вставки без возможности поворота в шестигранное гнездо 512, образованное в дистальном конце дистального сегмента 510 пускового ствола. Передаточная шестерня 228 может быть установлена или образована на передаточном стволе 230, поддерживаемом с возможностью поворота элементами-перегородками 204, 206. Выходная шестерня 232 может быть установлена или образована на выходном приводном стволе 234, поддерживаемом с возможностью поворота элементами-перегородками 204, 206. В целях сборки дистальный конец 236 выходного приводного ствола234 может прикрепляться без возможности поворота к гнезду 238 выхода, выступающему дистально через дистальную торцевую крышку 210. В одном варианте конструкции дистальная торцевая крышка 210 может быть прикреплена к корпусу 202 соединительного элемента крепежными элементами 208 или любыми другими подходящими крепежными конструкциями. Гнездо 238 выхода может быть прикреплено на штифте к дистальному концу 236 выходного приводного ствола 234. Гнездо 238 выхода может сопрягаться без возможности поворота с крепежным элементом 184 приводного ствола. Например, гнездо 238 выхода может быть выполнено шестигранным, чтобы его можно было совместить с шестигранным выступом 186 на крепежном элементе 184 приводного ствола. Кроме того, для обеспечения функционального присоединения инструмента 100 к узлу 200 соединительного элемента на торцевой крышке 210 может быть образован или присоединен крепежный выступ.
Один вариант конструкции узла 200 соединительного элемента дополнительно может включать узел блокировки, по существу обозначенный как элемент 240. По меньшей мере в одной форме узел 240 блокировки включает подпружиненный блокирующий элемент или штифт 242, поддерживаемый с возможностью перемещения внутри блокирующего паза 214, образованного в корпусной части 202 соединительного элемента. Блокирующий штифт 242 может быть выполнен с возможностью перемещения по оси внутри блокирующего паза 214, так чтобы его блокирующий конец 244 выступал через отверстие 211 в торцевой крышке 210. См. ФИГ. 8. Блокирующая пружина 246 насажена на блокирующий штифт 242 для смещения блокирующего штифта 242 внутри блокирующей прорези 214 в дистальном направлении DD. Активирующий рычаг 248 может быть образован на/прикреплен к блокирующему штифту 242, позволяя пользователю передать на блокирующий штифт 242 разблокирующее перемещение в проксимальном направлении PD.
Как можно видеть на ФИГ. 3, 9 и 10, удлиненный канал 110 концевого эффектора 102 может иметь проксимальную торцевую стенку 116, в которой образовано соединительное отверстие 118 для приема в него крепежного выступа 212. Например, в одном варианте конструкции крепежный выступ 212 может включать шейку 213, на которой образована крепежная шляпка 215. Соединительное отверстие 118 может иметь первую круговую часть 120, размер которой позволяет вставить в нее крепежную шляпку 215. В соединительном отверстии 118 также может быть образован узкий паз 122, размер которого позволяет принимать в него шейку 213. Проксимальная торцевая стенка 116 также может иметь блокирующее отверстие 124 для приема в него дистального конца 244 блокирующего штифта 242.
Один способ присоединения концевого эффектора 102 к узлу 200 соединительного элемента хирургического инструмента 10 можно понять, обратившись к ФИГ. 12-14. Например, чтобы присоединить концевой эффектор 102 к узлу 200 соединительного элемента, пользователь может совместить шестигранный выступ 186 на крепежном элементе 184 приводного ствола с шестигранным гнездом 238 выхода. Аналогично шляпку 215 можно совместить с круговой частью 120 соединительного отверстия 118, как показано на ФИГ. 9 и 12. Далее пользователь может перемещением по оси вставить выступ 186 в гнездо 238, а крепежную шляпку 215 - в соединительное отверстие 118, как показано на ФИГ. 13. Затем пользователь может повернуть концевой эффектор 102 (как показано стрелкой R на ФИГ. 14), заставляя шейку 213 войти в паз 122 и позволяя дистальному концу 244 блокирующего штифта 242 защелкнуться в блокирующем отверстии 124, чтобы предотвратить дальнейший поворот концевого эффектора 102 относительно узла 200 соединительного элемента. Такая конструкция служит для функционального присоединения концевого эффектора 102 к хирургическому инструменту 10.
Для отсоединения концевого эффектора 102 от узла 200 соединительного элемента пользователь может применить разблокирующее перемещение к активирующему рычагу 246, чтобы сместить блокирующий штифт в проксимальном направлении PD. Такое перемещение блокирующего штифта 242 заставляет дистальный конец 244 блокирующего штифта 242 выйти из блокирующего отверстия 124 в торцевой стенке 116 удлиненного канала 110. После этого пользователь может свободно повернуть концевой эффектор 102 относительно узла соединительного элемента в противоположном направлении, выводя шейку 213 крепежного выступа 212 из паза 122 и позволяя крепежной шляпке 215 выйти наружу в направлении по оси из соединительного отверстия 118 в концевом эффекторе 102 и таким образом отсоединяя концевой эффектор 102 от узла 200 соединительного элемента. Из вышеизложенного понятно, что узел 200 соединительного элемента образует новую уникальную конструкцию для функционального присоединения хирургического инструмента 100, который функционирует благодаря подаче поворотного приводного перемещения (перемещений) к хирургическому инструменту 10. В частности, узел 200 соединительного элемента позволяет присоединять разнообразные хирургические инструменты 100 или концевые эффекторы 102 к узлу 30 удлиненного ствола хирургического инструмента 10.
Система шарнира
Как можно видеть на ФИГ. 1 и 2, узел 30 удлиненного ствола может образовывать ось ствола A-A. По меньшей мере в одной форме узел 30 удлиненного ствола может включать систему 300 шарнира для избирательного шарнирного поворота концевого эффектора 102 вокруг оси шарнира B-B, которая по существу перпендикулярна оси ствола A-A. Одна форма системы 300 шарнира показана на ФИГ. 15 и 16. Как можно видеть на представленных фигурах, система 300 шарнира может включать шарнирное сочленение 310 с электропитанием. По меньшей мере в одной конструкции шарнирное сочленение 310 включает дистальную соединительную часть или дистальную скобу 312, которая поддерживается с возможностью поворота на проксимально направленной втулке 203 корпусной части 202 соединительного элемента посредством дистального корпусного подшипника 314. См. ФИГ. 20. Дистальная скоба 312 может прикрепляться с возможностью поворота к проксимальной соединительной части или проксимальной скобе 330 посредством шарнирного штифта 332, образующего ось шарнира B-B. См. ФИГ. 18. Дистальная скоба 312 может включать дистально выступающую крепежную втулку 316, размер которой позволяет принять ее внутрь проксимального конца корпусной части 202 соединительного элемента. В крепежной втулке 316 может иметься кольцевой желоб 318, выполненный для приема в него крепежных штифтов 320. См. ФИГ. 8. Крепежные штифты 320 служат для крепления корпусной части 202 соединительного элемента к дистальной скобе 312 таким образом, чтобы корпусная часть 202 соединительного элемента могла поворачиваться относительно дистальной скобы 312 вокруг оси ствола A-A. Как можно видеть на ФИГ. 20, дистальный сегмент 510 пускового ствола проходит через втулку 203 корпусной части 202 соединительного элемента и поддерживается с возможностью поворота относительно нее посредством дистального подшипника 322 пускового ствола, установленного внутри втулки 203.
Для облегчения подачи поворотного приводного или пускового перемещения на концевой эффектор 102, а также для обеспечения поворота концевого эффектора 102 относительно удлиненного ствола 30 вокруг оси ствола A-A, при сохранении возможности шарнирного поворота концевого эффектора 102 относительно узла 30 удлиненного ствола вокруг оси шарнира B-B, шарнирное сочленение 310 может включать новый уникальный «вложенный» шестереночный узел, по существу обозначенный как элемент 350 и расположенный внутри зоны 351 шестерен между дистальной скобой 312 и проксимальной скобой 330. См. ФИГ. 18-20. Например, по меньшей мере в одной форме вложенный шестереночный узел 350 может включать внутренний блок 360 шестерен приводного ствола (или «первый блок шестерен»), который «вложен» во внешний блок 380 шестерен концевого эффектора (или «второй блок шестерен»). В настоящем документе термин «вложенный» может означать, что ни одна из частей первого блока 360 шестерен не проходит радиально за пределы какой-либо части второго блока 380 шестерен. Такая уникальная новая шестереночная конструкция компактна и обеспечивает передачу поворотных управляющих перемещений к концевому эффектору, одновременно позволяя дистальной скобе вращаться относительно проксимальной скобы. Как будет описано ниже более подробно, внутренний блок 360 шестерен приводного ствола обеспечивает подачу поворотных приводных или пусковых перемещений от проксимального сегмента 520 пускового ствола к дистальному сегменту 510 пускового ствола через шарнирное сочленение 310. Аналогично внешний блок 380 шестерен концевого эффектора обеспечивает подачу поворотных управляющих перемещений на узел 200 соединительного элемента от системы поворота 550 концевого эффектора, как будет описано ниже более подробно.
Например, по меньшей мере в одной форме внутренний блок 360 шестерен приводного ствола может включать
дистальную коническую шестерню 362 приводного ствола, которая может крепиться к проксимальному концу дистального сегмента 510 пускового ствола посредством винта 364. См. ФИГ. 17. Внутренний блок 360 шестерен приводного ствола также может включать проксимальную коническую шестерню 366 приводного ствола, которая крепится к проксимальному сегменту 520 пускового ствола посредством винта 368. См. ФИГ. 20. Кроме того, внутренний блок 360 шестерен приводного ствола также может включать передаточную шестерню 370 приводного ствола, установленную на подшипнике 374 передаточной шестерни, который установлен на поперечном стволе 372 шестерни. См. ФИГ. 17. Такой внутренний блок 360 шестерен приводного ствола может обеспечивать передачу поворотных приводных перемещений от проксимального сегмента 520 пускового ствола через шарнирное сочленение 310 к дистальному сегменту 510 пускового ствола.
Как указано выше, вложенный шестереночный узел 350 также включает внешний блок 380 шестерен концевого эффектора, который обеспечивает подачу поворотных управляющих перемещений на узел 200 соединительного элемента от системы поворота 550 концевого эффектора через шарнирное сочленение 310. По меньшей мере в одной форме внешний блок 380 шестерен концевого эффектора может, например, включать выходную конусную шестерню 382, которая установлена без возможности поворота (например, на шпонке) на направленную проксимально втулку 203 корпусной части 202 соединительного элемента. Внешний блок 380 шестерен концевого эффектора может дополнительно включать входную конусную шестерню 384, которая прикреплена без возможности поворота (например, на шпонке) на проксимальный сегмент 552 поворотного ствола системы поворота концевого эффектора 550. Кроме того, внешний блок 380 шестерен концевого эффектора может дополнительно включать передаточную шестерню 388 поворотного ствола, установленную на подшипнике внешней передаточной шестерни 386, который поддерживается на поперечно направленном шарнирном штифте 332. См. ФИГ. 17. Шарнирный штифт 332 проходит через полый поперечный ствол 372 шестерни и служит для шарнирного соединения дистальной скобы 312 с проксимальной скобой 330 с целью шарнирного поворота вокруг поперечной оси шарнира B-B. Шарнирный штифт 332 может удерживаться на месте пружинными эффекторами 334. Это уникальное новое шарнирное сочленение 310 и вложенный шестереночный узел 350 обеспечивают передачу различных управляющих перемещений от узла 20 рукоятки через узел 30 удлиненного ствола к концевому эффектору 102 и при этом позволяет концевому эффектору 102 поворачиваться вокруг оси A-A удлиненного ствола и шарнирно поворачиваться вокруг оси шарнира B-B.
Поворот концевого эффектора 102 вокруг оси шарнира B-B относительно узла 30 удлиненного ствола может осуществляться при помощи системы 400 управления шарниром. В различных формах система 400 управления шарниром может включать двигатель 402 управления шарниром, который функционально поддерживается в узле 20 рукоятки. См. ФИГ. 15. Двигатель 402 управления шарниром может быть соединен с узлом 410 привода шарнира, который функционально поддерживается на отсоединяемом приводном патроне 700, который съемно поддерживается в узле 20 рукоятки, как будет описано ниже более подробно. По меньшей мере в одной форме узел 410 привода шарнира может включать проксимальный сегмент 412 ствола привода шарнира, который поддерживается с возможностью поворота в узле 710 корпуса ствола отсоединяемого приводного патрона 700. См. ФИГ. 27 и 28. Например, проксимальный сегмент 412 ствола привода шарнира может поддерживаться с возможностью поворота внутри дистальной части 712 корпуса ствола посредством шарнирных подшипников 414. Кроме того, проксимальный сегмент 412 ствола привода шарнира может поддерживаться с возможностью поворота в проксимальной части 714 корпуса ствола посредством подшипников 415. См. ФИГ. 28. Система 400 управления шарниром также может содержать проксимальный сегмент 420 ствола шарнира, приводимый в поворотное перемещение вокруг оси ствола A-A двигателем 402 управления шарнира. Как можно видеть также на ФИГ. 15, узел 410 привода шарнира также может включать пару роликов 416, 417 привода шарнира, которые приводят в перемещение приводной ремень 418 шарнира. Таким образом, активация двигателя 402 управления шарниром может приводить к повороту проксимального сегмента 420 ствола шарнира вокруг оси ствола A-A. См. ФИГ. 15.
Как можно видеть на ФИГ. 15 и 16, проксимальный сегмент 420 ствола шарнира имеет резьбовую часть 422, выполненную с возможностью резьбового соединения с соединительной планкой 424 привода шарнира. Поворот дистального сегмента 420 приводного ствола шарнира в первом направлении может перемещать соединительную планку 424 привода шарнира по оси в дистальном направлении DD, а поворот дистального сегмента 420 приводного ствола шарнира в противоположном или втором направлении может перемещать соединительную планку 424 привода шарнира по оси в проксимальном направлении PD. Соединительная планка 424 привода шарнира может быть соединена с рейкой 426 шарнира посредством штифта 428. Рейка 426 шарнира в свою очередь может быть соединена с дистальной скобой 312 посредством штифта 429. См. ФИГ. 17. Таким образом, когда врачу нужно повернуть концевой эффектор 102 или инструмент 100 вокруг оси шарнира BB относительно узла 30 удлиненного ствола врач активирует двигатель 402 управления шарниром, чтобы двигатель 402 управления шарниром поворачивал проксимальный сегмент 420 ствола шарнира, таким образом перемещая рейку 426 шарнира в нужное положение для поворота дистальной скобы 312 (и присоединенного к ней концевого эффектора 102) в нужном направлении. См. ФИГ. 21 и 22.
Пусковая система
Как указано выше, концевой эффектор 102 может приводиться в действие поворотными управляющими перемещениями, поданными на приводной винт 180 концевого эффектора пусковой системой 500, которая включает дистальный сегмент 510 пускового ствола и проксимальный сегмент 520 пускового ствола. См. ФИГ. 23. Проксимальный сегмент 520 пускового ствола содержит часть узла 30 удлиненного ствола и может поддерживаться с возможностью поворота внутри полого проксимального сегмента 552 поворотного ствола посредством гильзы 522 дистального подшипника. См. ФИГ. 20. Возвращаясь к ФИГ. 23, по меньшей мере в одной форме пусковая система 500 включает пусковой двигатель 530, который функционально поддерживается в узле 20 рукоятки. Проксимальный конец проксимального сегмента 520 пускового ствола может поддерживаться с возможностью поворота внутри отсоединяемого приводного патрона 700 и может быть выполнен с возможностью соединения с пусковым двигателем 530 так, как это подробно описано ниже. Как можно видеть на ФИГ. 30, проксимальный конец проксимального сегмента 520 пускового ствола может поддерживаться с возможностью поворота в упорном подшипнике 524, установленном с дистальной пластиной-перегородкой 722 узла 720 перегородки приводного патрона. Активация пускового двигателя 530 в итоге приводит к повороту приводного винта 180 концевого эффектора и подаче поворотного управляющего перемещения на концевой эффектор 102.
Система поворота концевого эффектора
В различных формах хирургический инструмент 10 также может включать систему поворота концевого эффектора или «систему дистального вращения» 550 для избирательного поворота концевого эффектора 102 относительно узла 30 удлиненного ствола вокруг оси ствола A-A. Система поворота 550 концевого эффектора может включать проксимальный сегмент 552 поворотного ствола, который также содержит часть узла 30 удлиненного ствола. Как можно видеть на ФИГ. 20, проксимальный сегмент 552 поворотного ствола может поддерживаться с возможностью поворота внутри проксимальной скобы 330 посредством дистального подшипника 554 и проксимального подшипника 556. Кроме того, проксимальный сегмент 552 поворотного ствола может поддерживаться с возможностью поворота внутри проксимального сегмента 420 ствола шарнира посредством гильзы 558 дистального подшипника и проксимального подшипника 559. См. ФИГ. 20 и 30. Проксимальный конец проксимального сегмента 552 поворотного ствола также может поддерживаться с возможностью поворота внутри узла 720 перегородки приводного патрона посредством проксимального подшипника 555, как можно видеть на ФИГ. 30.
По меньшей мере в одной форме система поворота концевого эффектора 550 может включать двигатель, поворачивающий концевой эффектор (или «двигатель дистального вращения») 560, который функционально поддерживается в узле 20 рукоятки. См. ФИГ. 24. Двигатель 560 поворота концевого эффектора может быть соединен с узлом 570 поворотного привода, который функционально поддерживается на отсоединяемом приводном патроне 700. По меньшей мере в одной форме узел 570 поворотного привода включает проксимальный сегмент 572 ствола поворотного привода, который поддерживается с возможностью поворота в узле 710 корпуса ствола отсоединяемого приводного патрона 700. См. ФИГ. 27. Например, проксимальный сегмент 572 ствола поворотного привода может поддерживаться с возможностью поворота я внутри дистальной части 712 корпуса ствола посредством подшипников 576. Кроме того, проксимальный сегмент 572 ствола поворотного привода поддерживается с возможностью поворота в проксимальной части 714 корпуса ствола посредством подшипника 577. См. ФИГ. 28. Как можно видеть на ФИГ. 24 и 28, узел 570 поворотного привода также может включать пару роликов 574, 575 поворотного привода, которые приводят в движение ремень 578 поворотного привода. Таким образом, активация двигателя 560 поворота концевого эффектора приводит к повороту проксимального сегмента 552 поворотного ствола вокруг оси ствола A-A. Поворот проксимального сегмента 552 поворотного ствола приводит к повороту узла 200 соединительного элемента и в итоге присоединенного к нему концевого эффектора 102.
Система поворота ствола
Различные формы хирургического инструмента 10 также могут включать систему поворота ствола, по существу обозначенную как элемент 600. В настоящем документе система поворота ствола может также называться «системой проксимального вращения». По меньшей мере в одной форме система 600 поворота ствола включает проксимальный сегмент 602 внешнего ствола, который также содержит часть узла 30 удлиненного ствола. Проксимальный сегмент 602 внешнего ствола имеет дистальный конец 604, соединенный без возможности поворота с проксимальной скобой 330. Как можно видеть на ФИГ. 19 и 26, в дистальном конце 604 имеется зазорный вырез 606, чтобы обеспечивалась активация относительно него рейки 426 шарнира. Система 600 поворота ствола может включать двигатель поворота ствола (или «двигатель проксимального вращения») 610, который функционально поддерживается в узле 20 рукоятки. Двигатель 610 поворота ствола может быть соединен с узлом 620 привода ствола, который функционально поддерживается на отсоединяемом приводном патроне 700. По меньшей мере в одной форме узел 620 привода ствола включает проксимальный сегмент 622 приводного ствола, который поддерживается с возможностью поворота в дистальной части 712 корпуса ствола отсоединяемого приводного патрона 700 посредством подшипников 624. См. ФИГ. 28. Кроме того, проксимальный сегмент 622 приводного ствола поддерживается с возможностью поворота в проксимальной части 714 корпуса приводного ствола посредством подшипника 626. Как можно видеть на ФИГ. 26 и 28, узел 620 привода ствола также может включать пару приводных роликов 630, 632 поворотного привода, которые приводят в движение ремень 634 привода ствола. Приводной ролик 632 прикреплен без возможности поворота к проксимальному сегменту 602 приводного ствола, так чтобы поворот приводного ролика 632 приводил к повороту проксимального сегмента 602 приводного ствола и присоединенного к нему концевого эффектора 102 вокруг оси ствола A-A. Как можно дополнительно видеть на ФИГ. 28 и 30, проксимальный сегмент 602 приводного ствола поддерживается с возможностью поворота внутри дистальной части 712 корпуса ствола посредством пары гильз подшипников 607 и 608.
Новые уникальные конструкции систем шарнира настоящего изобретения обеспечивают множество степеней свободы концевого эффектора и обеспечивают подачу на него поворотных управляющих перемещений. Например, во время некоторых хирургических операций может потребоваться размещение концевого эффектора в одной плоскости с целевой тканью. Различные конструкции настоящего изобретения обеспечивают концевому эффектору по меньшей мере три степени свободы при удовлетворении требований по размерным ограничениям, часто встречающихся при выполнении хирургических вмешательств, например, лапароскопическим способом.
Различные формы настоящего хирургического инструмента обеспечивают для пользователя улучшенные манипуляционные возможности, точность и эффективность при размещении концевого эффектора относительно целевой ткани. Например, в общепринятых шарнирных сочленениях ствола, обычно применяемых для передачи усилия, часто применяют универсальный (-ые) шарнир (шарниры), соединения по типу позвоночных шарниров и деформируемые при изгибе соединения. Для всех из этих способов могут быть характерны ограничения эффективности, включая ограничения радиуса изгиба, и чрезмерной длиной. Различные формы новых уникальных узлов удлиненного ствола и приводных систем, описанные в настоящем документе, например, позволяют свести к минимуму расстояние между осью шарнира и концевым эффектором в сравнении с другими общепринятыми шарнирными конструкциями. Конструкции узлов удлиненного ствола и шарнирного сочленения, описанные в настоящем документе, обеспечивают передачу по меньшей мере одного поворотного управляющего перемещения на концевой эффектор, а также обеспечивают концевому эффектору множество степеней свободы, позволяя точно размещать концевой эффектор относительно целевой ткани.
После применения концевого эффектора 102 или инструмента 100 его можно отсоединить от узла 200 соединительного элемента хирургического инструмента 10 и либо утилизировать, либо отдельно подвергнуть повторной обработке и стерилизации с использованием подходящих способов стерилизации. Хирургический инструмент 10 можно применять множество раз в сочетании с новыми концевыми эффекторами/инструментами. В зависимости от конкретной области применения может понадобиться повторная стерилизация хирургического инструмента 10. Например, инструмент 10 можно повторно стерилизовать перед применением в другом хирургическом вмешательстве.
Хирургические инструменты перед применением должны быть стерильными. Распространенным способом стерилизации медицинских устройств служит обработка устройства водяным паром нужной температуры в течение нужного периода времени. Такие процедуры стерилизации, хотя и являются эффективными, по существу плохо подходят для стерилизации хирургических инструментов, в которых использованы электрические компоненты, по причине высоких температур, создаваемых в случае способов в условиях паровой стерилизации. Такие устройства обычно стерилизуют путем воздействия на них газом, например, этиленоксидом.
Различные формы хирургического инструмента 10 можно стерилизовать с использованием общепринятых способов стерилизации. По меньшей мере в одной форме, например, узел 30 удлиненного ствола можно изготовить из компонентов и материалов, которые можно эффективно стерилизовать посредством способов, связанных с применением относительно высоких температур стерилизации. Однако могут понадобиться способы стерилизации, имеющие более низкие температуры обработки, при стерилизации, например, узла рукоятки, во избежание возможного повреждения электрических компонентов. Следовательно, может понадобиться стерилизация узла 20 рукоятки, содержащего различные электрические компоненты, отдельно от узла 30 удлиненного ствола. Для облегчения применения таких раздельных процедур стерилизации узел 30 удлиненного ствола, по меньшей мере в одной форме, можно отделять от узла 20 рукоятки.
Узел отсоединяемого приводного патрона
Более конкретно и с отсылкой к ФИГ. 28, узел отсоединяемого приводного патрона 700 функционально поддерживается внутри части узла 20 рукоятки. Например, в одной форме узел 700 отсоединяемого приводного патрона может быть установлен внутри дистальных сегментов 21 и 22 корпуса рукоятки, которые могут соединяться при помощи элементов-защелок, винтов или других крепежных конструкций. Дистальные сегменты 21 и 22 корпуса рукоятки, соединенные вместе, могут в настоящем документе могут называться «дистальной частью корпуса рукоятки» или «корпусом» 25. Узел 700 отсоединяемого приводного патрона может, например, включать узел 710 корпуса ствола, содержащий дистальный корпус 712 ствола и проксимальный корпус 714 ствола. Узел 700 отсоединяемого приводного патрона может также содержать узел 720 перегородок приводного патрона, который включает дистальную пластину-перегородку 722 и проксимальную соединительную пластину-перегородку 724. Как было описано выше, по меньшей мере в одной форме, узел 700 отсоединяемого приводного патрона может функционально поддерживать узел 410 привода шарнира, проксимальный конец проксимального сегмента 520 пускового ствола, узел 570 поворотного привода и узел 620 привода ствола. Для облегчения быстрого соединения сегмента 520 пускового ствола, узла 410 привода шарнира, узла 570 поворотного привода и узла 620 привода ствола к пусковому двигателю 530, двигателю 402 управления шарниром, двигателю 560 поворота концевого эффектора и двигателю 610 поворота ствола соответственно можно применить новую уникальную соединительную конструкцию.
Монтажный узел двигателей
По меньшей мере в одной форме, например, узел 700 отсоединяемого приводного патрона может быть выполнен с возможностью разъемного соединения с монтажным узлом двигателей, по существу обозначенным как элемент 750. Монтажный узел 750 двигателей может поддерживаться внутри сегментов 23 и 24 корпуса рукоятки, которые соединяются вместе защелками, винтами и т. п. и служат для образования части 26 пистолетной рукоятки узла 20 рукоятки. См. ФИГ. 1. Сегменты 23 и 24 корпуса рукоятки, соединенные вместе, могут в настоящем документе называться «проксимальной частью корпуса рукоятки» или «корпусом» 28. Как показано на ФИГ. 29-32, монтажный узел 750 двигателей может содержать крепежный элемент 752 двигателей, который съемно поддерживается внутри сегментов 23 и 24 корпуса рукоятки. По меньшей мере в одной форме, например, крепежный элемент 752 двигателей может содержать нижнюю пластину 754 и вертикально направленный узел 756 пластины-перегородки двигателей. На нижней пластине 754 может быть образован крепежный язычок 758, выполненный с возможностью создания удерживающего соединения при приеме в нижнюю пластину 730 отсоединяемого приводного патрона 700. Кроме того, в узле 756 перегородки двигателей установлены правый позиционный штифт 772 и левый позиционный штифт 774, которые выступают через нее дистально в соответствующие правую и левую гнездовые трубки 716, 718, образованные в проксимальной части 714 корпуса ствола. См. ФИГ. 32.
По меньшей мере в одной конфигурации узел 700 отсоединяемого приводного патрона может быть съемно соединен с монтажным узлом 750 двигателей посредством конструкций 760 фиксаторов с возможностью высвобождения. Как можно видеть, например, на ФИГ. 31, конструкция 760 фиксатора с возможностью высвобождения может размещаться на каждой из боковых сторон монтажного узла 750 двигателей. Каждая конструкция 760 фиксатора с возможностью высвобождения может включать плечо 762 фиксатора, которое шарнирно крепится к узлу 756 перегородки двигателя соответствующим штифтом 764. Каждое плечо 762 фиксатора может выступать через соответствующий крепежный зацеп 766, образованный на дистальной стороне узла 756 перегородки двигателя. Крепежные зацепы 766 могут быть выполнены с возможностью скользящего приема внутрь соответствующих принимающих элементов 726, которые выступают проксимально из проксимальной пластины 724 перегородки соединительного элемента. См. ФИГ. 30 и 32. Когда узел 700 приводного патрона приведен в зацепление с монтажным узлом 750 двигателей, крепежные зацепы 766 входят с возможностью скольжения в соответствующие приемные элементы 726 таким образом, что плечи 762 фиксаторов входят в удерживающее зацепление с фиксирующей частью 728 соответствующего приемного элемента 726. С каждым плечом 762 фиксатора связана соответствующая ему пружина 768 фиксатора, которая смещает плечо 762 фиксатора в удерживающее зацепление с соответствующей фиксирующей частью 728, удерживая узел 700 отсоединяемого приводного патрона соединенным с монтажным узлом 750 двигателей. Кроме того, по меньшей мере в одной форме каждая конструкция 760 фиксатора дополнительно включает кнопку высвобождения 770, присоединенную с возможностью перемещения к перегородке 756 двигателей и ориентированную для избирательного контакта с фиксатором. Каждая кнопка высвобождения 770 может включать высвобождающую пружину 771, которая смещает кнопку 770 из контакта с соответствующим ему плечом 762 фиксатора. Когда врачу нужно отсоединить узел 700 отсоединяемого приводного патрона от монтажного узла 750 двигателей, врач просто нажимает каждую кнопку 770 вглубь, смещая плечи 762 фиксаторов из удерживающего зацепления с фиксирующими частями 728 на приемных элементах 726, а затем вытягивает узел 700 отсоединяемого приводного патрона, выводя его из зацепления с монтажным узлом 750 двигателей. Можно использовать другие конструкции фиксаторов с возможностью высвобождения для разъемного соединения узла 700 отсоединяемого приводного патрона и монтажного узла 750 двигателей.
По меньшей мере в одной форме хирургического инструмента 10 также могут использоваться узлы соединительного элемента, предназначенные для соединения управляющих двигателей с соответствующими им приводными узлами, функционально установленными в отсоединяемом приводном патроне 700. Более конкретно и со ссылкой на ФИГ. 28-32, узел 780 соединительного элемента используют для разъемного соединения узла 410 привода шарнира с двигателем 402 управления шарниром. Узел 780 соединительного элемента может включать проксимальную соединительную часть 782, функционально соединенную с приводным стволом 404 двигателя 402 управления шарниром. Кроме того, узел 780 соединительного элемента дополнительно может включать дистальную соединительную часть 784, прикрепленную к проксимальному стволу 412 привода шарнира. См. ФИГ. 28 и 32. Каждая дистальная соединительная часть 784 может содержать множество (показаны три) соединительных выступа 786, выполненных с возможностью совмещения без поворота с соответствующими углубленными участками 788, образованными в проксимальной соединительной части 782. См. ФИГ. 30. Аналогично другая дистальная соединительная часть 784 может быть прикреплена к проксимальному стволу 572 узла 570 поворотного привода, а соответствующая проксимальная соединительная часть 782 прикреплена к приводному стволу 562 двигателя поворота. Кроме того, другая дистальная соединительная часть 784 может быть прикреплена к проксимальному сегменту 520 пускового ствола, а соответствующая проксимальная соединительная часть 782 прикреплена к приводному стволу 532 пускового двигателя. Еще одна дистальная соединительная часть 784 может быть прикреплена к проксимальному сегменту 622 приводного ствола узла 620 привода ствола, а соответствующая проксимальная соединительная часть 782 прикреплена к приводному стволу 612 двигателя 610 поворота ствола. Такие узлы 780 соединительного элемента упрощают соединение управляющих двигателей с соответствующими им приводными узлами, независимо от положения приводных стволов и стволов двигателей.
Вышеописанные различные формы новой уникальной конструкции узла рукоятки позволяют легко отсоединять узел 30 удлиненного ствола от остальной части узла 20 рукоятки, содержащей двигатели 402, 530, 560 и 610 и различные электрические компоненты, содержащие управляющую систему, по существу обозначенную как элемент 800. Сами по себе узел 30 удлиненного ствола и отсоединяемый приводной патрон 700 можно стерилизовать отдельно от остальной части узла рукоятки, вмещающей двигатели и управляющую систему, которые могут быть повреждены при использовании способов стерилизации с применением высоких температур. Такая новая уникальная конструкция отсоединяемого приводного патрона также может использоваться в сочетании с конструкциями, в которых приводная система (двигатели и управляющие компоненты) составляет часть роботизированной системы, которая может быть портативной или не портативной.
Конструкция шестереночного приводного патрона
На ФИГ. 100-103 представлен альтернативный приводной патрон 5700, в котором используется набор шестереночных приводов для передачи приводных перемещений от двигателей на соответствующие им стволы. Как можно видеть на ФИГ. 100, приводной патрон 5700 может включать узел 5710 дистального корпуса ствола, который включает дистальный корпус 5712 ствола, функционально поддерживающий множество конструкций с блоками шестерен.
Дистальный корпус 5712 ствола выполнен с возможностью съемной установки на проксимальной пластине-перегородке 5724 соединительного элемента, имеющей пару монтажных гнезд 5725 для приема соответствующих крепежных зацепов 5713, выступающих из дистального корпуса 5712 ствола, как можно видеть на ФИГ. 100. Как и в вышеописанных конструкциях, ствол пускового или рассекающего двигателя 530 прямо соединен с проксимальным сегментом 5520 пускового ствола посредством узла 5780 соединительного элемента, как можно видеть на ФИГ. 103. Проксимальный сегмент 5552 поворотного ствола системы поворота 550 концевого эффектора поворачивается посредством блока шестерен, по существу обозначенного как элемент 5565. По меньшей мере в одной форме, например, блок шестерен 5565 включает ведомую шестерню 5566, прикрепленную к проксимальному сегменту 5552 поворотного ствола и поддерживаемую в зубчатом зацеплении с приводной шестерней 5567. Как можно наиболее детально видеть на ФИГ. 103, приводная шестерня 5567 установлена на выступающем стволе 5568, который поддерживается с возможностью поворота в дистальном корпусе 5712 ствола. Выступающий ствол 5568 соединен со стволом двигателя поворота концевого эффектора или двигателя 560 дистального вращения посредством узла 5780 соединительного элемента.
Проксимальный сегмент 5420 ствола шарнира поворачивается посредством блока шестерен, по существу обозначенного как элемент 5430. По меньшей мере в одной форме, например, блок шестерен 5430 включает ведомую шестерню 5432, прикрепленную к проксимальному сегменту 5420 ствола шарнира и поддерживаемую в зубчатом зацеплении с приводной шестерней 5434. Как можно наиболее детально видеть на ФИГ. 102, приводная шестерня 5434 установлена на выступающем стволе 5436, который поддерживается с возможностью поворота в дистальном корпусе 5712 ствола. Выступающий ствол 5436 соединен со стволом двигателя 402 управления шарниром посредством узла 5780 соединительного элемента.
Проксимальный сегмент 5602 внешнего ствола поворачивается посредством блока шестерен, по существу обозначенного как элемент 5640. По меньшей мере в одной форме, например, блок шестерен 5640 включает ведомую шестерню 5642, прикрепленную к проксимальному сегменту 5602 внешнего ствола и поддерживаемую в зубчатом зацеплении с двусторонней конической шестерней 5644, которая поддерживается с возможностью поворота внутри дистального корпуса 5712 ствола. Двусторонняя коническая шестерня 5644 находится в зубчатом зацеплении с узлом 5646 приводной конической шестерни, установленным на выступающем стволе 5648, который также поддерживается с возможностью поворота в дистальном корпусе 5712 ствола. Выступающий ствол 5648 соединен со стволом двигателя поворота ствола или двигателя 610 проксимального вращения посредством узла 5780 соединительного элемента. См. ФИГ. 101. Можно применять альтернативные двигатели и блоки шестерен приводного патрона 5700 для приведения в действие и управления хирургическим инструментом описанными в настоящем документе способами.
Системы электропитания и управления
В различных формах в хирургическом инструменте 10 может использоваться управляющая система, по существу обозначенная как элемент 800, предназначенная для управления различными двигателями, использованными в инструменте. Двигатели 402, 530, 560 и 610 и связанные с ними управляющие компоненты также могут в настоящем документе называться «приводной системой», по существу обозначенной как элемент 398. В одной форме приводная система 398 служит для «электрической генерации» множества управляющих перемещений. Термин «электрическая генерация» означает применение электрических сигналов для активации двигателя или другого питаемого электроэнергией устройства, и это можно отличать от управляющих перемещений, создаваемых вручную или иным механическим способом, без применения электрического тока. В одной форме приводная система 398 может функционально поддерживаться внутри узла рукоятки, которую врач может удерживать в руке или в руках. Однако в других формах приводная система 398 может составлять часть и/или может приводиться в действие и/или поддерживаться роботизированной системой.
В одной форме двигатели 402, 530, 560 и 610 и связанные с ними управляющие компоненты могут получать электроэнергию от батареи 802, помещенной внутри части 26 пистолетной рукоятки узла 20 рукоятки. В других конструкциях батарея может поддерживаться, например, роботизированной системой. Однако в других вариантах осуществления узел 20 рукоятки может иметь выходящий из него шнур питания (не показан) для подачи энергии от другого источника электроэнергии. В других конфигурациях двигатели и электрические компоненты могут принимать электропитание и сигналы управления от роботизированной системы. Управляющая система 800 может содержать различные компоненты управляющей системы, которые могут включать, например, дистальную печатную плату 810, которая поддерживается на отсоединяемом приводном патроне 700. Дистальная печатная плата 810 может включать электрические разъемы 812 и/или электрические компоненты, которые можно стерилизовать общепринятыми методиками паровой стерилизации, а также другими низкотемпературными способами стерилизации. Управляющая система 800 дополнительно может включать проксимальную печатную плату 820, которая поддерживается в части узла рукоятки 20, образованной сегментами 23 и 24 корпуса рукоятки. Проксимальная печатная плата 820 выполнена с возможностью электрического соединения с дистальной печатной платой 810 во время соединения отсоединяемого приводного патрона 700 с монтажным узлом 750 двигателей.
В различных формах хирургического инструмента 10 может использоваться новый и уникальный механизм 830 управляющего переключателя, который может функционально помещаться внутри или поддерживаться частью 26 пистолетной рукоятки узла 20 рукоятки. Например, по меньшей мере в одной форме механизм 830 управляющего переключателя может включать новый уникальный управляющий джойстик 840, позволяющий пользователю осуществлять максимальное функциональное управление различными аспектами хирургического инструмента 10 посредством единого интерфейса. Более конкретно и обращаясь к ФИГ. 33-39, одна форма управляющего джойстика 840 может включать управляющий ствол 842 джойстика, функционально прикрепленный к джойстиковому узлу 850 переключателей, который помещается внутри узла 844 корпуса переключателей с возможностью перемещения. Узел 844 корпуса переключателей может быть установлен внутри части 26 пистолетной рукоятки узла 20 рукоятки. По меньшей мере в одной форме, например, узел 844 корпуса переключателей может включать основную часть 846 кожуха и заднюю пластину 848 корпуса. Как можно наиболее детально видеть на ФИГ. 35-39, печатная плата 852 джойстика может функционально поддерживаться на джойстиковом узле 850 переключателей посредством задней монтажной пластины 854. Задняя монтажная пластина 854 может быть выполнена с возможностью перемещения как единым блоком с джойстиковым узлом 850 переключателей и печатной платой 852 джойстика внутри корпуса 844 переключателей. Пружина 856 джойстика может поддерживаться между задней пластиной 848 корпуса и задней монтажной пластиной 854, смещая джойстиковый узел 850 переключателей и управляющий ствол 842 джойстика вперед или в дистальном направлении. См. ФИГ. 36 и 38.
Управляющий джойстик 840 может иметь электрическое соединение с проксимальной печатной платой 820 и батареей 802 управляющей системы 800 посредством различных соединительных кабелей 864, обеспечивая управление подачей электропитания на различные двигатели 402, 530, 560 и 610 хирургического инструмента 10. Например, путем отклонения или иной активации управляющего ствола 842 джойстика пользователь может управлять двигателем 402 управления шарниром и/или двигателем 560 дистального вращения и/или двигателем 610 проксимального вращения.
Джойстиковый узел переключателей 850 может в настоящем документе называться «первым переключателем» для управления одним или более двигателями приводной системы. Управляющий джойстик 840 может дополнительно включать первый датчик 860, который может содержать, например, магнит, который может быть установлен на печатную плату 852 джойстика для перемещения вместе с ней. Кроме того, второй или неподвижный датчик 862 может быть установлен внутрь от задней пластины 848 корпуса. Второй датчик 862 может содержать, например, «датчик Холла» или аналогичное определяющее устройство. По меньшей мере в одном варианте конструкции, например, датчик 862 может быть выполнен с возможностью связи с пусковым двигателем 530. Первый и второй датчики 860, 862 в настоящем документе могут называться «вторым переключателем», по существу обозначенным как элемент 858. Вышеупомянутая конструкция позволяет джойстиковому узлу 850 переключателей перемещаться вдоль оси внутрь и наружу, когда пользователь нажимает на управляющий ствол 842 джойстика. Благодаря использованию перемещения внутрь и наружу всего джойстикового узла 850 переключателей по меньшей мере в одной форме конструкция по существу содержит переключатель внутри переключателя. В неактивированном положении пружина 856 джойстика смещает джойстиковый узел 850 переключателей вперед (в дистальном направлении). Когда врач нажимает джойстик 842 внутрь (проксимально), первый датчик 860 перемещается ближе ко второму датчику 862. Перемещение первого датчика 860 ближе ко второму датчику 862 может приводить к активации так называемого второго переключателя 858, который может активировать рассекающий двигатель или пусковой двигатель 530.
При выполнении процедуры с применением концевого эффектора 102 врачу может потребоваться открывать и закрывать узел 190 упора для перемещения целевой ткани в нужное положение без рассечения или разрезания ткани. В одной форме, когда врач исходно нажимает на управляющий ствол 842 джойстика, второй переключатель 858 активирует пусковой двигатель 530, таким образом заставляя разрезающий ткань элемент 160 начать перемещаться дистально. В различных формах режущий ткань элемент 160 расположен внутри концевого эффектора 102 таким образом, что исходное перемещение режущего ткань элемента 160 в дистальном направлении заставляет узел 190 упора закрыться (т. е. повернуться к кассете 130 со скобками без разрезания ткани или пуска хирургических скоб). Когда врач высвобождает управляющий ствол 842 джойстика, пружина 856 джойстика смещает джойстиковый узел 850 переключателей дистально, таким образом перемещая первый датчик 860 от второго датчика 862. Перемещение датчика 860 от второго датчика 862 может уменьшать скорость поворота пускового двигателя 530, пока пусковой двигатель 530 не остановится или отключится окончательно. По меньшей мере в одной форме этот механизм второго переключателя 858 может быть выполнен таким образом, чтобы скорость поворота пускового двигателя 530 была прямо пропорциональна скорости, с которой пользователь нажимает на управляющий ствол 842 джойстика.
После того как врач выполнит размещение и захват целевой ткани концевым эффектором 102, концевой эффектор 102 можно активировать или «запустить» полным нажатием на управляющий ствол 842 джойстика. В различных формах джойстиковый узел 850 переключателей также может содержать третий сжимающий переключатель 866, выполненный с этим узлом зацело, также связанный с управляющей системой 800. Полное нажатие на управляющий ствол 842 джойстика может приводить к активации третьего переключателя 866. По меньшей мере в одной форме при активации третьего переключателя 866 пусковой двигатель 530 будет оставаться активированным даже после того, как врач отпустит управляющий ствол 842 джойстика. После завершения пускового такта (т. е. когда разрезающий ткань элемент 160 был выдвинут до своего самого дистального положения в концевом эффекторе 102) пользователь снова может нажать на управляющий ствол 842 джойстика и высвободить третий переключатель 866, таким образом вернув управление пусковым двигателем 530 ко второму переключателю 858. Таким образом, если врач отпустит управляющий ствол 842 джойстика после полного нажатия на него во второй раз, пружина 856 джойстика сместит джойстиковый узел 850 переключателей в исходное положение. Управляющая система 800 заставит пусковой двигатель 530 поворачиваться в противоположном направлении, пока разрезающий ткань элемент 160 не вернется в свое исходное положение, где узел 190 упора снова перейдет в открытое положение, позволяя концевому эффектору 102 отпустить рассеченную ткань.
В различных формах механизм переключателя 830 также может использовать новый уникальный узел 870 управления с поворотной ручкой. Как можно видеть на ФИГ. 42, узел 870 управления с поворотной ручкой может быть установлен с возможностью поворота на выступающей дистально части 845 втулки узла 844 корпуса переключателей таким образом, чтобы узел управления 870 с поворотной ручки мог поворачиваться вокруг оси переключателя SA-SA. В таком положении элемент - исполнительный механизм 872 поворотной ручки узла 870 управления с поворотной ручкой удобно размещается в положении, в котором врач может повернуть ее большим пальцем и/или указательным пальцем, удерживая в руке часть 26 пистолетной рукоятки узла 20 рукоятки. Элемент - исполнительный механизм 872 поворотной ручки может быть прикреплен к воротнику 874 поворотной ручки, надеваемому на часть 845 втулки, и может удерживаться в положении с возможностью поворота при помощи крепежного фланца 27, образованного сегментами 23 и 24 рукоятки. Левый датчик (магнит) 876 и правый датчик (магнит) 878 установлены на воротнике 874 поворотной ручки, как показано на ФИГ. 41. Датчики 876 и 878 могут иметь противоположные полярности. Неподвижный датчик 880 может быть установлен на узле 844 корпуса переключателей таким образом, чтобы он располагался центрально между левым датчиком 876 и правым датчиком 878. Неподвижный датчик 880 может представлять собой, например, «датчик Холла», и может быть присоединен к проксимальной печатной плате 820 управляющей системы 800 с целью управления одним из управляющих двигателей. Например, узел 870 управления с поворотной ручкой можно применять, например, для управления двигателем проксимального вращения или двигателем 610 поворота ствола. В других конструкциях узел управления 870 с поворотной ручкой можно применять для управления двигателем 560 дистального вращения для поворота концевого эффектора вокруг оси ствола относительно узла удлиненного ствола. Можно использовать пару центрирующих пружин 882 для смещения воротника 874 поворотной ручки в центральное или нейтральное положение. Когда воротник 874 поворотной ручки находится в нейтральном положении, как показано на ФИГ. 41, двигатель поворота ствола или двигатель 610 проксимального вращения (или двигатель 560 дистального вращения - в зависимости от ситуации) остановлен.
Когда пользователь поворачивает исполнительный механизм 872 поворотной ручки по часовой стрелке в положение, показанное на ФИГ. 43, управляющая система 800 может заставить двигатель610 поворота ствола поворачивать узел 30 удлиненного ствола вокруг оси ствола A-A по часовой стрелке. Аналогично, когда пользователь поворачивает исполнительный механизм 872 поворотной ручки против часовой стрелки в положение, показанное на ФИГ. 44, управляющая система 800 может заставить двигатель поворота ствола 610 поворачивать узел 30 удлиненного ствола против часовой стрелки в вокруг оси ствола A-A. Иными словами, когда пользователь вращает исполнительный механизм 872 поворотной ручки по часовой стрелке или против часовой стрелки, неподвижный датчик 880 управляет направлением поворота узла 30 удлиненного ствола в зависимости от близости левого или правого датчика 876, 878 относительно неподвижного датчика 880. Реакцию неподвижного датчика 880 можно отрегулировать таким образом, чтобы по мере поворота пользователем исполнительного механизма 872 поворотной ручки относительная скорость, с которой двигатель 610 поворачивает узел 30 удлиненного ствола, увеличивалась. Как можно видеть на ФИГ. 41-44, на узле 844 корпуса переключателей может быть образован стопорный выступ 847 для стыковки с прорезью 875 в воротнике поворотной ручки с целью предотвращения контакта между датчиками 876, 878, выполненными с возможностью перемещения, и неподвижным датчиком 880. Специалисту в данной области будет понятно, что управляющий узел 870 с поворотной ручкой можно применять для управления любыми другими двигателями хирургического инструмента 10. Аналогично управляющий джойстик 840 может быть выполнен с возможностью управления любым одним или более двигателями в хирургическом инструменте 10. Новые уникальные конструкции управляющего узла с поворотной ручкой, описанные в настоящем документе, позволяют пользователю осуществлять функциональное управление посредством поворота эргономичного элемента - исполнительного механизма поворотной ручки. В альтернативных формах датчики 876, 878, выполненные с возможностью перемещения, могут содержать датчики Холла, каждый из которых связан с двигателем. Неподвижный датчик 880 может содержать магнит.
В различных формах каждый из двигателей хирургического инструмента 10 может быть снабжен соответствующим кодовым датчиком положения, который связан с микропроцессорной схемой на проксимальной печатной плате 820. Например, двигатель 402 управления шарниром может иметь функционально соединенный с ним кодовый датчик 404 положения, который связан с проксимальной печатной платой 820. Пусковой двигатель или рассекающий двигатель 530 может иметь функционально соединенный с ним кодовый датчик 534 положения, который связан с проксимальной печатной платой 820. Двигатель поворота концевого эффектора или двигатель 560 дистального вращения может иметь функционально соединенный с ним кодовый датчик 564 положения, который связан с проксимальной печатной платой 820. Двигатель поворота ствола или двигатель 610 проксимального вращения может иметь функционально соединенный с ним кодовый датчик 614 положения, который связан с проксимальной печатной платой 820. Кодовые датчики положения могут служить для предоставления микропроцессорным схемам обратной связи, касающейся числа оборотов и направления поворота каждого из двигателей. В некоторых формах, помимо кодовых датчиков положения, узел 570 привода поворота может использовать конструкции с датчиками для отслеживания поворота различных сегментов ствола. Например, как можно видеть на ФИГ. 15, 28 и 29, на ролике 417 привода шарнира может быть установлен первый датчик 419 шарнира, выполненный с возможностью его обнаружения вторым датчиком 421 шарнира, который может представлять собой, например, датчик Холла, установленный на дистальной печатной плате 810. Первый и второй датчики 419, 421 шарнира служат дополнительными средствами обратной связи для отслеживания поворотного положения проксимального ствола 420 шарнира. Аналогично на ролик 575 дистального вращения узла 570 привода вращения может быть установлен первый датчик 580 дистального вращения, выполненный с возможностью его обнаружения вторым датчиком 582 дистального вращения, установленным на дистальной печатной плате 810. См. ФИГ. 24, 28, и 29. Первый и второй датчики 580, 582 дистального вращения служат дополнительными средствами обратной связи для отслеживания поворотного положения проксимального сегмента 552 поворотного ствола. Кроме того, ролик 632 узла 620 привода проксимального вращения может иметь первый датчик 634 проксимального вращения, выполненный с возможностью его обнаружения вторым датчиком 636 проксимального вращения, установленным на дистальной печатной плате 810. См. ФИГ. 26, 28, и 29. Первый и второй датчики 634, 636 проксимального вращения служат дополнительными средствами обратной связи для отслеживания поворотного положения проксимального сегмента 602 внешнего ствола.
Электропроводящие пути от концевого эффектора к узлу рукоятки
Как описано в настоящем документе, различные формы хирургического инструмента 10 могут эффективно применяться с разнообразными концевыми эффекторами или хирургическими инструментами, которые требуют или используют поворотные или иные перемещения при действиях/манипуляциях концевого эффектора/инструмента. Например, одна форма концевого эффектора 102 требует поворотных управляющих перемещений для открывания и закрывания узла 190 упора, выталкивания хирургических скоб и рассечения ткани. Одна форма концевого эффектора 102 также может быть оснащена конструкцией с дистальным датчиком для восприятия достигнутой узлом 190 упора степени или величины закрывания относительно хирургической кассеты 130 со скобками. Например, узел 190 упора может включать первый датчик 890 упора, установленный на дистальном конце упора. См. ФИГ. 3. Датчик 890 упора может представлять собой, например, датчик Холла, выполненный с возможностью обнаружения второго датчика 892 кассеты со скобками (магнита), установленного на дистальном конце хирургической кассеты 130 со скобками. По меньшей мере в одной форме первый датчик 890 упора может быть связан по меньшей мере с одним проводником 894 концевого эффектора, установленным на узле 190 упора, как показано. В одной форме, например, проводник 894 концевого эффектора содержит плоскую металлическую полосу, на проксимальном конце которой образован гибкий крючок 896. По существу при применении в настоящем документе термины «проводник» или «проводящий» относятся к элементу или компоненту, способному проводить через себя электрический ток. Например, проводник может содержать провод или провода, гибкие проводящие полосы или металлические дорожки, многожильный плоский проводящий кабель и т. п. В настоящем документе термин «имеет электрический контакт с» или «электрически связан с» означат, что компоненты выполнены с возможностью передавать между собой электрический ток или сигналы.
На ФИГ. 45 и 46, можно видеть, что гибкий крючок 896 может быть ориентирован для контакта с дистальным концом 244 блокирующего штифта 242. Блокирующий штифт 242 может быть изготовлен, например, из электропроводящего материала и покрыт изоляционным покрытием (например, полимерным и т. п.) для электрической изоляции блокирующего штифта 242 от корпусной части 202 соединительного элемента, но может иметь открытый конец, выполненный с возможностью вхождения в электрический контакт с крючком 896. Кроме того, блокирующая пружина 246 также может быть изготовлена из электропроводящего материала (например, металла). Блокирующая пружина 246 может быть прикреплена (например, припаяна и т. п.) к блокирующему штифту 242 таким образом, чтобы блокирующий штифт 242 и блокирующая пружина 246 образовывали электропроводный путь соединительного элемента для проведения электрического тока через узел 200 соединительного элемента. Блокирующая пружина 246 также может быть покрыта изоляционным покрытием для электрического изолирования ее от корпусной части 202 соединительного элемента. Блокирующий штифт 242 и блокирующая пружина 246 могут в совокупности в настоящем документе называться «узлом 249 блокирующего штифта». Блокирующая пружина 246 может заканчиваться проксимальным концом 247, выполненным с возможностью вхождения в скользящий электрический контакт с узлом 250 проксимального проводника, установленным на дистальной скобе 312 шарнирного сочленения 310.
Как можно видеть на ФИГ. 8, одна форма узла 250 проксимального проводника может включать электропроводящий провод/провода/дорожку 252 и кольцевой электрический проводник в виде, например, проводящей шайбы 254. Как можно видеть на ФИГ. 46, проводник 252 связан с проксимальным участком 256 проводника, которая выступает через дистальную скобу 312 для связи с проводником 258 шарнирного сочленения, поддержкой которому служит гибкая крышка 900 сочленения, которая проходит над шарнирным сочленением 310. По меньшей мере в одной форме крышка 900 сочленения включает полый кожух 902, который имеет открытый проксимальный конец 904, открытый дистальный конец 906 и канал 908 для приема сочленения, направленный между ними. Полый кожух 902 может содержать множество ребер 910 и может быть изготовлен из полимерного или аналогичного неэлектропроводящего материала, способного растягиваться во всех направлениях, приспосабливаясь к перемещениям компонентов шарнирного сочленения. Однако крышка 900 сочленения также может быть изготовлена из других подходящих материалов и конструкций, таких как гибкие трубки с микровырезами и т. п. Проводник 258 шарнирного сочленения может содержать, например, плоский проводящий кабель, провод, провода, дорожки и т. п. Как можно дополнительно видеть на ФИГ. 46, проксимальный конец проводника 258 шарнирного сочленения имеет электрический контакт с проводником 260 ствола на проксимальном сегменте 602 внешнего ствола.
Обращаясь далее к ФИГ. 47 и 48, по меньшей мере в одной форме проксимальный конец проводника 260 ствола может быть ориентирован для вхождения в скользящий контакт с проводящим кольцом 262, установленным в узле 20 рукоятки. Такая конструкция может позволить электрическому току протекать между проводником 260 ствола и проводящим кольцом 262 при повороте узла 30 удлиненного ствола вокруг оси ствола A-A относительно узла 20 рукоятки. Как можно дополнительно видеть на ФИГ. 47 и 48, проводник 264 соединен с проводящим кольцом 262 и проходит проксимально через корпус 20 рукоятки. Проводник 264 может содержать провод или другой подходящий проводник и может иметь проксимальный конец 266, выполненный с возможностью гибкого контакта с концом левого позиционного штифта 774. В частности, например, проксимальный конец 266 может проходить через стенку левого позиционного гнезда 718 таким образом, чтобы при вставке в него левого позиционного штифта 774 проксимальная концевая часть 266 проводника 264 входила в контакт с левым позиционным штифтом 774. По меньшей мере в одной форме левый позиционный штифт 774 изготовлен из электропроводящего материала (металла) таким образом, что когда проксимальный конец 266 проводника 264 входит с ним в контакт, между этими компонентами может протекать электрический ток. Кроме того, соединительный проводник 776 служит для электрического соединения левого позиционного штифта 774 с узлом проксимальной печатной платы 820 для облегчения передачи между ними электрического тока.
Вышеописанная конструкция упрощает прохождение электрического тока между концевым эффектором или хирургическим инструментом, прикрепленным к узлу 30 удлиненного ствола хирургического инструмента 10, и компонентами управляющей системы, размещенными в узле 20 рукоятки хирургического инструмента 10. Этот электропроводящий путь сохраняется при одновременном сохранении способности к повороту концевого эффектора относительно узла удлиненного ствола, шарнирного поворота концевого эффектора относительно узла удлиненного ствола и поворота концевого эффектора и узла удлиненного ствола как единого целого. Крышка 900 сочленения может обеспечивать путь электрической связи между удлиненным стволом и концевым эффектором. Крышка 900 сочленения может содержать гибкую электрическую полосу, провод, дорожку и т. п., для проведения более чем одного сигнала с целью обеспечения электрической связи. Следовательно, в концевом эффекторе может использоваться множество различных датчиков или электрических компонентов для обеспечения различных форм обратной связи с пользователем. Например, могут использоваться датчики для определения количества циклов применения, отслеживания прохождения режущего инструмента внутри концевого эффектора при пуске, для обратной связи с управляющей системой с целью автоматического управления различными двигателями в узле рукоятки и т. п.
На ФИГ. 49 представлено альтернативное шарнирное сочленение 310', выполненное с возможностью проведения через него электрического тока или сигналов. В этой форме предусмотрен дистальный проводник 270 электрического соединения, проходящий через дистальную скобу 312' и контактирующий со встроенной в нее дистальной металлической шайбой 272, как показано. На проксимальной скобе 330' может быть установлена проксимальная металлическая шайба 274 для обеспечения поворотного контакта с дистальной металлической шайбой 272, когда дистальная скоба 312' соединена с проксимальной скобой 330' описанным выше способом. Проксимальная металлическая шайба 274 может быть изогнута или скошена для сохранения скользящего контакта между шайбами 272, 274. Проксимальный проводник 276 электрического соединения в виде, например, контактной полоски, провода или дорожки прикреплен к шайбе 274 и выполнен с возможностью электрического контакта с проводником 260 ствола на проксимальном сегменте 602 внешнего ствола. Следовательно, такая конструкция обеспечивает прохождение электрического тока/сигналов от концевого эффектора 102 через блокирующий штифт 242, блокирующую пружину 242 (т. е. узел 249 блокирующего штифта), проводящее кольцо 252, дистальный проводник 270 электрического соединения, шайбы 272, 274 и проксимальный проводник 276 электрического соединения к проводнику 260 ствола.
Альтернативные конструкции шарнирного сочленения
Еще одна форма шарнирного сочленения 1000 показана на ФИГ. 50-53. Такое шарнирное сочленение 1000 может обеспечивать шарнирный поворот и поворот присоединенного к нему концевого эффектора или инструмента вокруг оси A-A удлиненного ствола, к которому прикреплено шарнирное сочленение 1000. Шарнирное сочленение также может обеспечивать такое перемещение концевого эффектора или хирургического инструмента и при этом обеспечивать подачу поворотного управляющего перемещения на концевой эффектор/инструмент для его активации или манипулирования им. Шарнирное сочленение 1000 может быть соединено с узлом удлиненного ствола, по конструкции аналогичному узлу 30 удлиненного ствола, описанному выше, либо оно может быть соединено с другими подходящими узлами ствола. Узел удлиненного ствола может быть соединен с узлом рукоятки, вмещающим множество двигателей. Один двигатель может применяться для подачи управляющих перемещений на гибкий элемент-кабель 1010, проходящий через узел удлиненного ствола и функционально соединенный с шарнирным сочленением 1000. Например, гибкий кабель 1010 может быть прикреплен к шпульному или роликовому узлу, функционально прикрепленному или связанному со стволом соответствующего двигателя таким образом, чтобы работа двигателя активировала кабель 1010. Узел рукоятки также может включать пусковой двигатель, функционально прикрепленный к проксимальному пусковому стволу 1030, который проходит через узел удлиненного ствола и взаимодействует с шарнирным сочленением 1000, как будет описано ниже более подробно. Узел рукоятки также может включать двигатель, функционально взаимодействующий с концевым эффектором или ствола 1040 дистального вращения, который передает поворотное управляющее перемещение на шарнирное сочленение 1000 и который может применяться для поворота концевого эффектора или хирургического инструмента вокруг оси ствола A-A относительно удлиненного ствола. Узел рукоятки может также включать двигатель проксимального вращения, используемый для поворота узла удлиненного ствола вокруг оси ствола A-A описанным выше способом.
По меньшей мере в одной форме шарнирное сочленение 1000 может включать узел 1020 проксимальной скобы, прикрепленный или образованный на конце узла удлиненного ствола. В конструкции, показанной на ФИГ. 50-53, узел 1020 проксимальной скобы образован на дистальном конце узла 30 удлиненного ствола. Как можно видеть на указанных фигурах, узел 1020 проксимальной скобы имеет дистальную торцевую стенку 1022 и пару разделенных плеч 1024, 1026 скобы. Проксимальная скоба 1020 выполнена с возможностью шарнирного соединения с дистальной скобой 1050 посредством вращающегося ствола 1051, который служит для образования оси шарнира B-B. Ось шарнира B-B может быть по существу перпендикулярна оси ствола A-A.
На дистальной скобе 1050 имеется гнездо 1052, образованное на нем, и пара плеч 1054, 1056 дистальной скобы. Вращающийся ствол 1051 проходит центрально через плечи 1024, 1054, 1056 и 1026 скобок, как показано на ФИГ. 53. На плече 1054 скобки может иметься образованный на ней ролик 1058 для кабеля, к которому прикреплен гибкий кабель 1010. Следовательно, поворот кабеля 1010 соответствующим ему двигателем приводит к повороту дистальной скобы 1050 относительно проксимальной скобы 1020 вокруг оси шарнира B-B.
В различных формах шарнирное сочленение 1000 также может включать поворачиваемую монтажную втулку 1060, принимаемую с возможностью поворота внутри гнезда 1052. На монтажной втулке 1060 может иметься прикрепленная к ней кольцевая шестерня 1062, выполненная с возможностью зубчатого зацепления с ведущей шестерней1064 дистального вращения. Ведущая шестерня 1064 дистального вращения прикреплена к стволу 1066 ведущей шестерни, поддерживаемому с возможностью поворота в торцевой стенке 1053 дистальной скобы 1050. На стволе 1066 ведущей шестерни имеется прикрепленная к нему выходная шестерня 1068 дистального вращения. Выходная шестерня 1068 дистального вращения поддерживается в зубчатом зацеплении с передаточной шестерней 1070 дистального вращения, которая насажена с возможностью поворота на вращающемся стволе 1051 и находится в зубчатом зацеплении с входной шестерней 1072 дистального вращения. Входная шестерня 1072 дистального вращения установлена на ствол 1040 дистального вращения. Выходная шестерня 1068 дистального вращения, передаточная шестерня 1070 дистального вращения и входная шестерня 1072 дистального вращения в настоящем документе называются «блоком шестерен дистального вращения» и по существу обозначены как элемент 1069. Передаточная шестерня 1070 дистального вращения является «свободно вращающейся» на вращающемся стволе 1051 таким образом, что поворот ствола 1040 дистального вращения в конечном итоге приводит к повороту ведущей шестерни 1064 дистального вращения без поворота вращающегося ствола 1051. Поворот ведущей шестерни 1064 дистального вращения внутри кольцевой шестерни 1062 приводит к повороту монтажной втулки 1060 вокруг оси ствола A-A. В различных формах концевой эффектор или хирургический инструмент может быть напрямую соединен с монтажной втулкой 1060 таким образом, что поворот монтажной втулки 1060 приводит к повороту концевого эффектора/инструмента. Например, монтажная втулка 1060 может быть образована с гнездом 1061 втулки, размер которого позволяет принять с возможностью удерживания в нем части концевого эффектора/инструмента. В альтернативных конструкциях монтажная втулка 1060 может являться составной частью концевого эффектора, либо концевой эффектор может быть прикреплен к монтажной втулке 1060 другими крепежными конструкциями. Например, монтажная втулка 1060 может быть прикреплена к узлу соединительного элемента описанного выше типа и конструкции, и затем концевой эффектор/инструмент может разъемно прикрепляться к узлу соединительного элемента.
Шарнирное сочленение 1000 также может облегчать передачу поворотного управляющего перемещения через сочленение 1000 к прикрепленному концевому эффектору/инструменту. Как можно видеть на ФИГ. 52 и 53, дистальный конец проксимального пускового ствола 1030 поддерживается с возможностью поворота дистальной торцевой стенкой 1022 узла 1020 проксимальной скобы, и к нему прикреплена входная пусковая шестерня 1080. Входная пусковая шестерня 1080 находится в зубчатом зацеплении с пусковой передаточной шестерней 1082, насаженной на вращающемся стволе 1051. Передаточная пусковая шестерня 1082 находится в зубчатом зацеплении с выходной пусковой шестерней 1084, установленной на пусковом выходном стволе 1090, установленном в торцевой стенке 1053 дистальной скобы 1050. Пусковой выходной ствол 1090 может быть выполнен с возможностью приводного зацепления с соответствующим приводным элементом или стволом в концевом эффекторе/инструменте. Например, дистальному концу 1092 пускового выходного ствола 1090 может быть придана шестигранная форма, чтобы он мог входить в соответствующее шестигранное гнездо, образованное в крепежном фланце 1094, который может быть выполнен с возможностью прикрепления к приводному стволу концевого эффектора/инструмента. Пусковая входная шестерня 1080, пусковая передаточная шестерня 1082 и пусковая выходная шестерня 1084 в настоящем документе называются «блоком шестерен пускового ствола», по существу обозначенным как элемент 1081. Передаточная пусковая шестерня 1082 является «свободно вращающейся» на вращающемся стволе 1051 таким образом, что поворот проксимального пускового ствола 1030 в конечном итоге приводит к повороту пускового выходного ствола 1090 без поворота вращательного ствола 1051. Блок шестерен 1069 дистального вращения и блок шестерен 1081 пускового ствола являются по существу «вложенными» друг в друга, совместно облегчая шарнирный поворот концевого эффектора/инструмента относительно узла удлиненного ствола, при этом обеспечивая передачу поворотных управляющих перемещений на концевой эффектор и при этом обеспечивая поворот концевого эффектора вокруг оси ствола A-A.
На ФИГ. 54-60 представлена еще одна альтернативная конструкция шарнирного сочленения 1100. По меньшей мере в одной форме шарнирное сочленение 1100 может включать проксимальную скобу 1110, центральную скобу 1130 и дистальную скобу 1150. Шарнирное сочленение 1100 может быть выполнено с возможностью обеспечения шарнирного поворота присоединенного к нему концевого эффектора или хирургического инструмента вокруг двух разных осей шарнира, B-B и C-C, которые по существу перпендикулярны друг другу, а также к оси ствола A-A узла 30'' удлиненного ствола, к которому прикреплено сочленение. Например, шарнирное сочленение 1100 может быть выполнено таким образом, чтобы центральная скоба 1130 могла поворачиваться вокруг первой оси шарнира B-B относительно первой скобы 1110, а дистальная скоба 1150 могла избирательно поворачиваться вокруг второй оси шарнира C-C относительно центральной скобы 1130. Шарнирное сочленение 1100 также может обеспечивать такой поворот концевого эффектора или хирургического инструмента и при этом обеспечивать подачу поворотного управляющего перемещения на концевой эффектор/инструмент для его активации или манипулирования им.
Шарнирное сочленение 1100 может быть соединено с узлом удлиненного ствола, по конструкции аналогичному узлу 30 удлиненного ствола, описанному выше, либо оно может быть соединено с другими подходящими узлами ствола. В одном варианте конструкции проксимальная скоба 1110 выполнена зацело с внешней трубкой узла 30'' удлиненного ствола. Как можно видеть на ФИГ. 54-60, проксимальная скоба 1110 имеет верхнее плечо 1112 проксимальной скобы и нижнее плечо 1114 проксимальной скобы. Центральная скоба 1130 также имеет верхнее плечо 1132 центральной скобы и нижнее плечо 1134 центральной скобы. Верхнее плечо проксимальной скобы шарнирно соединено с верхним плечом 1132 центральной скобы посредством проксимального шарнирного штифта 1116. Проксимальный шарнирный штифт 1116 также шарнирно соединяет нижнее плечо 1114 проксимальной скобы с нижним плечом 1134 центральной скобы. Проксимальный шарнирный штифт 1116 служит для образования первой оси шарнира B-B.
Также по меньшей мере в одной конструкции центральная скоба 1130 имеет правое плечо 1136 центральной скобы и левое плечо 1138 центральной скобы. Дистальная скоба 1150 также имеет правое плечо 1152 дистальной скобы и левое плечо 1154 дистальной скобы. Правое плечо 1136 центральной скобы шарнирно соединено с правым плечом 1152 дистальной скобы посредством дистального шарнирного штифта 1156. Левое плечо 1138 центральной скобы шарнирно соединено с левым плечом 1154 дистальной скобы посредством дистального шарнирного штифта 1156. Дистальный шарнирный штифт 1156 образует вторую ось шарнира C-C. В одном варианте конструкции дистальный шарнирный штифт 1156 прикреплен без возможности поворота к правому и левому плечам 1152, 1154 дистальной скобы таким образом, что дистальный шарнирный штифт 1156 поворачивается вместе с дистальной скобой 1150 относительно центральной скобы 1130.
Узел 30'' удлиненного ствола может быть присоединен к узлу рукоятки, вмещающему множество двигателей. Один двигатель может применяться для подачи управляющих перемещений на первый гибкий элемент-кабель1170, проходящий через узел 30'' удлиненного ствола и функционально соединенный с шарнирным сочленением 1100. Например, первый гибкий кабель 1170 может быть прикреплен к первому шпульному или роликовому узлу, функционально прикрепленному или связанному со стволом соответствующего двигателя таким образом, чтобы работа двигателя активировала первый кабель 1170.
В одном варианте конструкции первый гибкий кабель 1170 можно использовать для избирательного поворота центральной скобы 1130 относительно проксимальной скобы 1110 вокруг первой оси шарнира B-B. В такой конструкции, например, первый кабель 1170 проходит вокруг первого ролика (или шпули) 1180, который прикреплен к центральной скобе 1130. Например, первый ролик 1180 прикреплен к верхнему плечу 1132 центральной скобы и насажен с возможностью поворота на проксимальный шарнирный штифт 1116. Активация первого кабеля 1170 заставит центральную скобу 1130 повернуться относительно проксимальной скобы 1110 вокруг первой ос шарнира B-B.
В шарнирном сочленении 1100 также можно использовать второй гибкий кабель 1190, который надевается на шпульный или роликовый узел, функционально прикрепленный или связанный со стволом соответствующего двигателя внутри узла рукоятки таким образом, чтобы работа двигателя активировала второй кабель 1190. Второй кабель 1190 можно использовать для избирательного поворота дистальной скобы 1150 относительно центральной скобы 1130 вокруг второй оси шарнира C-C. В такой конструкции, например, второй кабель 1190 проходит вокруг второго ролика (или шпули) 1158, прикрепленного без возможности поворота к дистальному шарнирному штифту 1156. Активация второго кабеля 1190 заставит поворачиваться дистальный шарнирный штифт 1156 и прикрепленную к нему дистальную скобу 1150 вокруг второй оси шарнира C-C относительно центральной скобы 1130.
Шарнирное сочленение 1100 также может облегчать передачу поворотного управляющего перемещения через сочленение 1100 к прикрепленному концевому эффектору/инструменту. Проксимальный поворотный пусковой ствол 1200 может проходить через узел 30'' удлиненного ствола и может функционально соединяться с пусковым двигателем в узле рукоятки для передачи на него поворотного пускового перемещения. В одном варианте конструкции проксимальный пусковой ствол 1200 может быть полым, чтобы через него мог пройти второй кабель 1190. Проксимальный пусковой ствол 1200 может функционально взаимодействовать с проксимальным пусковым блоком шестерен 1210, который функционально поддерживается в шарнирном сочленении 1100. Например, в одном варианте конструкции первый пусковой блок шестерен 1210 может включать проксимальную входную пусковую шестерню 1212, прикрепленную к проксимальному пусковому стволу 1200. Проксимальная входная пусковая шестерня 1212 ориентирована для зубчатого зацепления с проксимальной пусковой передаточной шестерней 1214, насаженной на проксимальном вращающемся стволе 1116 с возможностью свободного поворота на нем. Проксимальная пусковая передаточная шестерня 1212 ориентирована для зубчатого зацепления с проксимальной пусковой выходной шестерней 1216, соединенной с центральным пусковым стволом 1218, проходящим с возможностью поворота через центральную перегородку 1131 центральной скобы 1130.
Шарнирное сочленение 1100 также может включать дистальный пусковой блок шестерен 1220, взаимодействующий с проксимальным пусковым блоком шестерен 1210 для передачи поворотного пускового или управляющего перемещения через шарнирное сочленение 1100. Дистальный пусковой блок шестерен 1220 может включать дистальную входную пусковую шестерню 1222, установленную на центральном пусковом стволе 1216. Дистальная входная пусковая шестерня 1222 находится в зубчатом зацеплении с дистальной пусковой передаточной шестерней 1224, которая установлена с возможностью поворота на дистальном поворотном штифте 1156 таким образом, что она может свободно поворачиваться на нем. Дистальная пусковая передаточная шестерня 1224 находится в зубчатом зацеплении с дистальной пусковой выходной шестерней 1226, которая поддерживается с возможностью поворота внутри дистальной скобы 1150. Дистальная выходная пусковая шестерня 1226 может быть выполнена с возможностью приводного зацепления с соответствующим приводным элементом или стволом в концевом эффекторе/инструменте.
Еще одна форма шарнирного сочленения 1300 показана на ФИГ. 61-66. Такое шарнирное сочленение 1300 может обеспечивать шарнирный поворот и поворот присоединенного к нему концевого эффектора или инструмента вокруг оси A-A удлиненного ствола, к которому прикреплено шарнирное сочленение 1300. Шарнирное сочленение также может обеспечивать такое перемещение концевого эффектора или хирургического инструмента и при этом обеспечивать подачу поворотного управляющего перемещения на концевой эффектор/инструмент для его активации или манипулирования им. Шарнирное сочленение 1300 может быть соединено с узлом удлиненного ствола, по конструкции аналогичному узлу 30 удлиненного ствола, описанному выше, либо оно может быть соединено с другими подходящими узлами ствола. Узел удлиненного ствола может быть соединен с узлом рукоятки, вмещающим множество двигателей. Один двигатель может применяться для подачи управляющих перемещений на гибкий кабель 1310, проходящий через узел удлиненного ствола и функционально соединенный с шарнирным сочленением 1300. Например, гибкий кабель 1310 может быть прикреплен к шпульному или роликовому узлу, функционально прикрепленному или связанному со стволом соответствующего двигателя таким образом, чтобы работа двигателя активировала кабель 1310. Узел рукоятки также может включать пусковой двигатель, функционально прикрепленный к проксимальному пусковому стволу 1330, который проходит через узел удлиненного ствола и взаимодействует с шарнирным сочленением 1300, как будет описано ниже более подробно. Узел рукоятки также может включать двигатель, функционально взаимодействующий с гибким стволом 1340 дистального вращения, который передает поворотное управляющее перемещение на шарнирное сочленение 1300 и который может применяться для поворота концевого эффектора или хирургического инструмента вокруг оси ствола A-A относительно удлиненного ствола. Узел рукоятки может также включать двигатель проксимального вращения, используемый для поворота узла удлиненного ствола вокруг оси ствола A-A описанным выше способом.
По меньшей мере в одной форме шарнирное сочленение 1300 может включать узел 1320 проксимальной скобы, прикрепленный или образованный на конце узла удлиненного ствола. В конструкции, показанной на ФИГ. 61-66, узел 1320 проксимальной скобы образован на дистальном конце внешней трубки, образующей часть узла 30'' удлиненного ствола. Как можно видеть на указанных фигурах, узел 1320 проксимальной скобы имеет дистальную торцевую стенку 1322 и пару разделенных плеч 1324, 1326 скобы. Проксимальная скоба 1320 выполнена с возможностью поворотного соединения с дистальной скобой 1350 посредством верхнего вращающегося ствола 1351 и нижнего вращающегося ствола 1353, которые служат для образования оси шарнира B-B. Ось шарнира B-B по существу перпендикулярна оси ствола A-A.
На дистальной скобе 1350 имеется гнездо 1352, образованное на нем, и пара плеч 1354, 1356 дистальной скобы. Верхний вращающийся ствол 1351 проходит центрально через плечи 1324 и 1354 скобы. Нижний вращающийся ствол 1353 проходит через плечи 1356 и 1026 скобы, как показано на ФИГ. 64. На плече 1356 скобы дополнительно имеется образованный на ней или прикрепленный к ней ролик 1358 для кабеля. Гибкий кабель 1310 прикреплен к ролику 1358 для кабеля таким образом, что активация кабеля 1310 вызывает шарнирный поворот дистальной скобы 1350 вокруг оси шарнира B-B относительно проксимальной скобы 1320.
В различных формах шарнирное сочленение 1300 также может включать поворачиваемую монтажную втулку 1360, принимаемую с возможностью поворота внутри гнезда 1052. На монтажной втулке 1060 может иметься прикрепленная к ней ведомая шестерня 1362, выполненная с возможностью зубчатого зацепления с ведущей шестерней 1364 дистального вращения. Ведущая шестерня 1364 дистального вращения прикреплена к стволу 1366 ведущей шестерни, поддерживаемому с возможностью поворота в торцевой стенке 1355 дистальной скобы 1350. По меньшей мере в одном варианте конструкции ведущая шестерня 1364 дистального вращения приводится в перемещение гибким стволом 1340 дистального вращения, который направлен через проксимальный опорный ствол 1342, направленный через узел 30'' удлиненного ствола. В различных формах концевой эффектор или хирургический инструмент может быть непосредственно соединен с монтажной втулкой 1360 таким образом, что поворот монтажной втулки 1360 приводит к повороту концевого эффектора/инструмента. Например, монтажная втулка 1360 может быть образована с гнездом 1361 втулки, размер которого позволяет принять с возможностью удерживания в нем части концевого эффектора/инструмента. В альтернативных конструкциях монтажная втулка 1360 может являться составной частью концевого эффектора, либо концевой эффектор может быть прикреплен к монтажной втулке 1360 другими крепежными конструкциями. Например, монтажная втулка 1360 может быть прикреплена к узлу соединительного элемента описанного выше типа и конструкции, и затем концевой эффектор/инструмент может разъемно прикрепляться к узлу соединительного элемента.
Шарнирное сочленение 1300 также может облегчать передачу поворотного управляющего перемещения через сочленение 1300 к прикрепленному концевому эффектору/инструменту. Как можно видеть на ФИГ. 63 и 64, дистальный конец проксимального пускового ствола 1330 поддерживается с возможностью поворота дистальной торцевой стенкой 1322 узла 1320 проксимальной скобы, и к нему прикреплена пусковая входная шестерня 1380. Входная пусковая шестерня 1380 находится в зубчатом зацеплении с пусковой передаточной шестерней 1382, насаженной на нижнем вращающемся стволе 1353. Передаточная пусковая шестерня 1382 находится в зубчатом зацеплении с выходной пусковой шестерней 1384, установленной на пусковом выходном стволе 1390, который проходит через торцевую стенку 1355 дистальной скобы 1350 и торцевую стенку 1370 монтажной втулки 1360. Пусковой выходной ствол 1390 может быть выполнен с возможностью приводного зацепления с соответствующим приводным элементом или стволом в концевом эффекторе/инструменте. Например, дистальному концу 1392 пускового выходного ствола 1390 может быть придана шестигранная форма, чтобы он мог входить в соответствующее шестигранное гнездо, образованное в крепежном фланце 1394, который может быть выполнен с возможностью прикрепления к приводному стволу концевого эффектора/инструмента. Пусковая входная шестерня 1380, пусковая передаточная шестерня 1382 и пусковая выходная шестерня 1384 в настоящем документе называются блоком шестерен пускового ствола, по существу обозначенным как элемент 1381. Передаточная пусковая шестерня 1382 является «свободно вращающейся» на нижнем вращающемся стволе 1353 таким образом, что поворот проксимального пускового ствола 1330 в конечном итоге приводит к повороту пускового выходного ствола1390 без поворота нижнего вращающегося ствола 1353. Блок шестерен 1369 дистального вращения и блок шестерен 1381 пускового ствола облегчают поворот концевого эффектора/инструмента относительно узла удлиненного ствола, при этом обеспечивая передачу поворотных управляющих перемещений на концевой эффектор и при этом обеспечивая поворот концевого эффектора вокруг оси ствола A-A.
Альтернативные монтажные узлы двигателей
На ФИГ. 67-69 представлен альтернативный монтажный узел двигателей, по существу обозначенный как элемент 1750. Монтажный узел 1750 двигателей может поддерживаться внутри сегментов 23 и 24 корпуса рукоятки, которые соединяются вместе защелками, винтами и т. п. и служат для образования части 26 пистолетной рукоятки узла 20 рукоятки. По меньшей мере в одной форме монтажный узел 1750 двигателей может содержать корпус 1752 двигателей, который съемно поддерживается внутри сегментов 23 и 24 корпуса рукоятки. По меньшей мере в одной форме, например, корпус 1752 двигателей содержит прикрепленный к нему узле 1756 перегородки двигателей. Корпус 1752 двигателей предназначен для поддерживания двигателей 402, 530, 560 и 610. На каждом двигателе имеется прикрепленная к нему собственная плата со схемой управления 1780, предназначенная для управления работой каждого двигателя различными способами, описанными в настоящем документе.
В некоторых формах рабочая часть 100 может содержать электрохирургический концевой эффектор, использующий электроэнергию для воздействия на ткань. Примеры электрохирургических концевых эффекторов и связанных с ними инструментов описаны в заявке на патент США № 13/536,393, озаглавленной «Бранша хирургического концевого эффектора и конфигурации электродов», досье патентного поверенного № END7137USNP/120141, и в заявке на патент США № 13/536,417, озаглавленной «Электродные соединения для хирургических инструментов с поворотным приводом», досье патентного поверенного № END7149USNP/120153, которые обе полностью включены в настоящий документ путем ссылки. На ФИГ. 70-73 показан пример концевого эффектора 3156, образующего альтернативную рабочую часть 100. Концевой эффектор 3156 можно выполнить с возможностью захвата и рассечения ткани и для одновременного сваривания захваченной ткани с помощью управляемой подачи энергии (например, радиочастотной (РЧ) энергии). Первая бранша 3160A и вторая бранша 3160B могут закрываться, таким образом захватывая или зацепляя ткань по продольной оси 3194, образованной элементом 3182, выполненным с возможностью перемещения по оси. Первая бранша 3160A и вторая бранша 3160B также могут прикладывать сжимающее воздействие к ткани.
На ФИГ. 70 представлен вид в перспективе некоторых форм электрохирургического концевого эффектора 3156 для применения с хирургическим инструментом 10. На ФИГ. 70 представлен концевой эффектор 3156 с открытыми браншами 3160A, 3160B. На ФИГ. 71 представлен вид в перспективе некоторых форм концевого эффектора 3156 с закрытыми браншами 3160A, 3160B. Как отмечено выше, концевой эффектор 3156 может содержать верхнюю первую браншу 3160A и нижнюю вторую браншу 3160B, которые могут быть прямыми или изогнутыми. Каждая из первой бранши 3160A и второй бранши 3160B может содержать удлиненный паз или канал 3162A и 3162B (ФИГ. 70) соответственно, расположенные снаружи вдоль их соответствующих средних частей. Кроме того, первая бранша 3160A и вторая бранша 3160B могут иметь захватывающие ткань элементы, например, такие как зубцы 3198, расположенные на внутренних частях первой бранши 3160A и второй бранши 3160B. Первая бранша 3160A может содержать кожух 3200A верхней первой бранши с обращенной наружу верхней первой поверхностью 3202A и подающей энергию верхней первой поверхностью 3204A. Вторая бранша 3160B может содержать кожух 3200B нижней второй бранши с обращенной наружу нижней второй поверхностью 3202B и подающей энергию нижней второй поверхностью 3204B. Первая подающая энергию поверхность 3204A и вторая подающая энергию поверхность 3204B могут обе U-образно огибать дистальный конец концевого эффектора 3156 вокруг. Следует понимать, что концевой эффектор 3156 может быть выполнен с возможностью поворота и шарнирного поворота аналогично тому, как описано в настоящем документе применительно к концевому эффектору 102.
На ФИГ. 72 представлена одна форма элемента 3182, выполненного с возможностью перемещения по оси, концевого эффектора 3156. Элемент 3182, выполненный с возможностью перемещения по оси, приводится в движение резьбовым приводным стволом 3151 (ФИГ. 70). Проксимальный конец резьбового приводного ствола 3151 может быть выполнен с возможностью соединения без поворота с гнездом 238 выхода и таким образом приема поворотного перемещения, обеспечиваемого двигателем 530. Элемент 3182, выполненный с возможностью перемещения по оси, может содержать резьбовую гайку 3153 для приема резьбового приводного ствола 3151 таким образом, что поворот резьбового приводного ствола 3151 заставляет элемент 3182, выполненный с возможностью перемещения по оси, поступательно перемещаться дистально и проксимально вдоль оси 3194 (ФИГ. 72). Элемент 3182, выполненный с возможностью перемещения по оси, может содержать одну или несколько частей, но в любом случае он может быть выполнен с возможностью перемещения или поступательного перемещения относительно удлиненного ствола 158 и/или браншей 3160A, 3160B. Кроме того, по меньшей мере в некоторых формах элемент 3182, выполненный с возможностью перемещения по оси, может быть сделан из дисперсионно-твердеющей нержавеющей стали 17-4. Дистальный конец элемента 3182, выполненного с возможностью перемещения по оси, может содержать двутавровый профиль с фланцами, выполненный с возможностью скольжения внутри каналов 3162A и 3162B в браншах 3160A и 3160B. Элемент 3182, выполненный с возможностью перемещения по оси, может скользить внутри каналов 3162A, 3162B, открывая и закрывая первую браншу 3160A и вторую браншу 3160B. Дистальный конец элемента 3182, выполненного с возможностью перемещения по оси, также может содержать верхний фланец, или С-образную часть 3182A, и нижний фланец, или С-образную часть 3182B. Фланцы 3182A и 3182B соответственно образуют внутренние криволинейные поверхности 3206A и 3206B для зацепления обращенных наружу поверхностей первой бранши 3160A и второй бранши 3160B. Открытие-закрытие браншей 3160A и 3160B может прикладывать очень сильное сжимающее усилие к ткани благодаря применению кулачковых механизмов, которые могут включать двутавровый профиль с возможностью перемещения элемента 3182, выполненного с возможностью перемещения по оси, и обращенные наружу поверхности 3208A, 3208B браншей 3160A, 3160B.
Более конкретно, обращаясь к ФИГ. 70-72, внутренние криволинейные поверхности 3206А и 3206B дистального конца элемента 3182, выполненного с возможностью перемещения по оси, в совокупности могут быть выполнены с возможностью скользящего зацепления с первой обращенной наружу поверхностью 3208A и второй обращенной наружу поверхностью 3208B первой бранши 3160A и второй бранши 3160B соответственно. Канал 3162A внутри первой бранши 3160A и канал 3162B внутри второй бранши 3160B могут быть выполнены по форме и размеру с возможностью обеспечивать перемещение элемента 3182, выполненного с возможностью перемещения по оси, который может содержать режущий ткань элемент 3210, например, содержащий острый дистальный край. На ФИГ. 71, например, представлен дистальный конец перемещаемого по оси элемента 3182, продвинутого по меньшей мере частично через каналы 3162A и 3162B (ФИГ. 70). Продвижение перемещаемого по оси элемента 3182 может закрывать концевой эффектор 3156, находящийся в открытой конфигурации, показанной на ФИГ. 70. В закрытом положении, показанном на ФИГ. 71, верхняя первая бранша 3160A и нижняя вторая бранша 3160B образуют зазор или расстояние D между первой подающей энергию поверхностью 3204A и второй подающей энергию поверхностью 3204B первой бранши 3160A и второй бранши 3160B соответственно. В различных формах расстояние D может составлять, например, от приблизительно 0,0005 дюйма до приблизительно 0,040 дюйма, а в некоторых формах, например, от приблизительно 0,001 дюйма до приблизительно 0,010 дюйма. Кроме того, края первой поверхности для подачи энергии 3204A и второй поверхности для подачи энергии 3204B могут быть скруглены для предотвращения рассечения ткани.
На ФИГ. 73 представлен вид в разрезе некоторых форм концевого эффектора 3156. Зацепляющая или контактирующая с тканью поверхность 3204B нижней бранши 3160B выполнена с возможностью подачи энергии к ткани, по меньшей мере частично, через кондуктивно-резистивный матрикс, такой как кожух с переменным сопротивлением, обладающий положительным температурным коэффициентом (ПТК). По меньшей мере на одной из верхней и нижней браншей 3160A, 3160B может располагаться по меньшей мере один электрод 3212, выполненный с возможностью подачи энергии от генератора 3164 к захваченной ткани. На зацепляющей или контактирующей с тканью поверхности 3204A верхней бранши 3160A может располагаться аналогичный кондуктивно-резистивный матрикс (т. е. материал с ПТК), либо в некоторых формах поверхность может представлять собой, например, проводящий электрод или изолирующий слой. В альтернативном варианте осуществления на зацепляющих поверхностях браншей могут располагаться любые подающие энергию компоненты, описанные в патенте США № 6,773,409, поданном 22 октября 2001 г., озаглавленном «СТРУКТУРА ЭЛЕКТРОХИРУРГИЧЕСКИХ БРАНШЕЙ ДЛЯ УПРАВЛЯЕМОЙ ПОДАЧИ ЭНЕРГИИ», описание которого полностью включено в настоящий документ путем ссылки.
Каждая из первой подающей энергию поверхности 3204A и второй подающей энергию поверхности 3204B может находиться в электрической связи с генератором 3164. Генератор 3164 соединяется с концевым эффектором 3156 посредством подходящих средств передачи, таких как проводники 3172, 3174. В некоторых формах генератор 3164 соединен с контроллером, таким как, например, блок 3168 управления. В различных формах блок 3168 управления может быть выполнен заодно с генератором 3164, либо может представлять собой модуль или устройство с отдельной схемой, электрически соединенное с генератором 3164 (данный вариант показан пунктиром). Генератор 3164 может быть выполнен в виде внешнего блока оборудования и/или может быть выполнен заодно с хирургическим инструментом 10.
Первая поверхность для подачи энергии 3204A и вторая поверхность для подачи энергии 3204B могут быть выполнены с возможностью приведения в контакт с тканью и подачи электрической энергии к захваченной ткани, обеспечивая герметизацию или сварку ткани. Блок 3168 управления регулирует электрическую энергию, подаваемую электрическим генератором 3164, который в свою очередь подает энергию для электрохирургии к первой подающей энергию поверхности 3204A и второй подающей энергию поверхности 3204B. Блок 3168 управления может регулировать мощность, создаваемую генератором 3164 в течение процесса активации.
Как указано выше, энергия для электрохирургии, подаваемая электрическим генератором 3164 и регулируемая или иным образом контролируемая блоком управления 3168, может представлять собой радиочастотную (РЧ) энергию или другие подходящие формы электрической энергии. Кроме того, противоположные первая и вторая подающие энергию поверхности 3204A и 3204B могут иметь кожухи с переменным сопротивлением, обладающие положительным температурным коэффициентом (ПТК), которые находятся в электрической связи с генератором 3164 и блоком 3168 управления. Дополнительные подробности относительно электрохирургических концевых эффекторов, механизмов закрытия браншей и подающих энергию электрохирургических поверхностях описаны в следующих патентах США и опубликованных заявках на патент патенте США №№: 7,087,054; 7,083,619; 7,070,597; 7,041,102; 7,011,657; 6,929,644; 6,926,716; 6,913,579; 6,905,497; 6,802,843; 6,770,072; 6,656,177; 6,533,784; 6,500,176; и опубликованных заявках на патент США № 2010/0036370 и 2009/0076506, которые все полностью включены в настоящий документ путем ссылки и составляют часть настоящего описания.
Существует подходящий генератор 3164, такой как модель GEN11, производства Ethicon Endo-Surgery, Inc., г. Цинциннати, штат Огайо. Кроме того, в некоторых формах генератор 3164 можно реализовать в виде электрохирургического блока (ESU), способного подавать мощность, достаточную для осуществления биполярной электрохирургии с применением радиочастотной (РЧ) энергии. В некоторых формах ESU может представлять собой биполярное устройство ERBE ICC 350, поставляемое ERBE USA, Inc., г. Мариетта, штат Джорджия. В некоторых формах, например, при применении в биполярной электрохирургии, можно использовать хирургический инструмент, имеющий активный электрод и возвратный электрод, причем активный и возвратный электроды могут быть расположены к, смежно и/или в электрической связи с обрабатываемой тканью таким образом, чтобы ток мог протекать от активного электрода через кожухи с положительным температурным коэффициентом (ПТК) и к возвратному электроду через ткань. Следовательно, в различных формах хирургический инструмент 10, который использует концевой эффектор 3156, создает подающий путь и возвратный путь, причем захваченная ткань для обработки соединяет или замыкает схему. В некоторых формах генератор 3164 может представлять собой монополярный РЧ-блок ESU, а хирургический инструмент 10 может содержать монополярный концевой эффектор, в который встроены один или более активных электродов. В такой системе для генератора 3164 может использоваться возвратная пластина, находящаяся в тесном контакте с телом пациента в месте, удаленном от операционного поля, и/или другой подходящий возвратный путь. Обратная пластина может быть соединена с генератором 3164 посредством кабеля.
В процессе эксплуатации электрохирургического инструмента 150 пользователь по существу захватывает ткань, подает энергию на захваченную ткань для образования сплавления или запайки, а затем выталкивает режущий ткань элемент 3210 на дистальном конце элемента 3182, выполненного с возможностью перемещения по оси, через захваченную ткань. В соответствии с различными формами поступательное перемещение по оси элемента 3182, выполненного с возможностью перемещения, может проводиться в заданном темпе или иным образом управляться, чтобы перемещение элемента 3182, выполненного с возможностью перемещения по оси, проходило с подходящей скоростью. При контроле скорости перемещения повышается вероятность того, что захваченная ткань будет герметизирована надлежащим и функциональным образом перед ее рассечением режущим элементом 3210.
В некоторых формах рабочая часть 100 может содержать ультразвуковой концевой эффектор, использующий энергию гармонических или ультразвуковых колебаний для обработки ткани. На ФИГ. 74 представлена одна форма ультразвукового концевого эффектора 3026 для применения с хирургическим инструментом 10. Узел 3026 концевого эффектора содержит узел 3064 эффекторного рычага и скальпель 3066 для образования браншей эффекторного механизма. Скальпель 3066 может активироваться при помощи ультразвука в акустическом соединении с ультразвуковым преобразователем 3016, расположенным внутри концевого эффектора 3026. Примеры малоразмерных преобразователей и концевых эффекторов, содержащих преобразователи, представлены в одновременно поданных заявках на патент США сер. № 13/538,601, озаглавленной «Ультразвуковые хирургические инструменты с дистально расположенными преобразователями» и опубликованной заявке на патент США № 2009/0036912. Преобразователь 3016 может иметь акустическое соединение (например, прямое или опосредованное механическое соединение) со скальпелем 3066 посредством волновода 3078.
Трубчатый активирующий элемент 3058 может перемещать узел 3064 эффекторного рычага в открытое положение в направлении 3062А, в котором узел 3064 эффекторного рычага и скальпель 3066 расположены в пространственном отношении относительно друг друга, а также в зажатое или закрытое положение в направлении 3062В, в котором узел 3064 эффекторного рычага и скальпель 3066 выполнены с возможностью стыковки с целью захвата ткани, расположенной между ними. Дистальный конец трубчатого возвратно-поступательного приводного элемента 3058 механически соединен с концевым исполнительным элементом в сборе 3026. В показанной форме дистальный конец трубчатого возвратно-поступательного активирующего элемента 3058 механически зацеплен с узлом 3064 эффекторного рычага, который выполнен с возможностью шарнирного поворота вокруг точки поворота 3070, чтобы открывать и закрывать узел 3064 эффекторного рычага. Например, в показанной форме узел 3064 эффекторного рычага выполнен с возможностью перемещения из открытого положения в закрытое положение в направлении 3062В вокруг точки поворота 3070, когда трубчатый возвратно-поступательный активирующий элемент 3058 оттянут проксимально. Узел 3064 эффекторного рычага выполнен с возможностью перемещения из закрытого положения в открытое положение в направлении 3062А относительно точки поворота 3070, когда трубчатый возвратно-поступательный активирующий элемент 3058 поступательно перемещается дистально (ФИГ. 75).
Трубчатый активирующий элемент 3058 может поступательно перемещаться проксимально и дистально вследствие поворота резьбового приводного ствола 3001. Проксимальный конец резьбового приводного ствола 3001 может быть выполнен с возможностью соединения без поворота с гнездом 238 выхода и таким образом приема поворотного перемещения, обеспечиваемого двигателем 530. Трубчатый активирующий элемент 3058 может содержать резьбовую гайку 3059 для приема резьбового приводного ствола 3001 таким образом, чтобы поворот резьбового приводного ствола 3001 приводил к поступательному перемещению трубчатого активирующего элемента 3058 дистально и проксимально. На ФИГ. 76 и 77 представлен дополнительный вид одной формы элемента 3058, выполненного с возможностью перемещения по оси, и трубчатой гайки 3059. В некоторых формах трубчатый активирующий элемент 3058 образует полость 3003. Волновод 3078 и/или часть 3066 скальпеля может проходить через полость 3003, как показано на ФИГ. 74.
В одном примере дистальный конец передающего ультразвук волновода 3078 может быть соединен с проксимальным концом скальпеля 3066 посредством соединения с внутренней резьбой, предпочтительно на или вблизи от пучности волны. Предполагается, что нож 3066 может быть прикреплен к ультразвуковому трансмиссионному волноводу 3078 при помощи любых подходящих средств, таких как сварное соединение или т.п. Хотя скальпель 3066 может быть отсоединен от передающего ультразвук волновода 3078, также предполагается, что концевой эффектор с одним элементом (например, скальпель 3066) и передающий ультразвук волновод 3078 могут быть образованы в виде единой части.
Ультразвуковой преобразователь 3016, известный как «пакет Ланжевена», по существу колеблется в результате электрического сигнала, создаваемого генератором 3005 (ФИГ. 74). Например, преобразователь 3016 может содержать множество пьезоэлектрических элементов или других элементов, преобразующих электрический сигнал от генератора 3005 в механическую энергию, в результате чего создается преимущественно стоячая акустическая волна продольного вибрационного перемещения ультразвукового преобразователя 3016 и скальпеля 3066 части узла концевого эффектора 3026 с ультразвуковыми частотами. Ультразвуковой преобразователь 3016 может иметь (но не обязательно) длину, равную целому числу, умноженному на половину длины волны системы (nλ/2; где n - любое положительное целое число; например, n=1, 2, 3…). Подходящий диапазон частот вибраций для преобразователя 3016 и скальпеля 3066 может составлять приблизительно от 20 Гц до 32 кГц, а хорошо подходящий диапазон частот вибраций может составлять приблизительно от 30 Гц до 10 кГц. Например, подходящая рабочая частота вибраций может составлять приблизительно 55,5 кГц.
Генератор 3005 может представлять собой любой подходящий тип генератора, размещенного внутри или снаружи от хирургического инструмента 10. Существует подходящий генератор, такой как модель GEN11 производства Ethicon Endo-Surgery, Inc., г. Цинциннати, штат Огайо. Когда преобразователь 3016 подключен к электропитанию, генерируется стоячая волна вибрационного перемещения посредством волновода 3078 и скальпеля 3066. Концевой эффектор 3026 выполнен с возможностью работы в резонансе таким образом, чтобы создавалась картина акустической стоячей волны с заданной амплитудой. Амплитуда вибрационного перемещения в любой точке преобразователя 3016, волновода 3078 и скальпеля 3066 зависит от местонахождения точки в пределах этих компонентов, в которой производят измерение вибрационного перемещения. Минимальная или проходящая через ноль стоячая волна вибрационного перемещения по существу называется узлом (т. е. местом, где перемещение минимально), а локальный абсолютный максимум или пиковое значение стоячей волны по существу называется пучностью (т. е. местом, где локальное перемещение максимально). Расстояние между пучностью и ближайшим к ней узлом составляет одну четверть длины волны (λ/4).
В одном примере осуществления скальпель 3066 может иметь длину, по существу равную произведению целого числа на половину длины волны системы (nλ/2). Дистальный конец скальпеля 3066 может располагаться вблизи пучности, чтобы обеспечивалось максимальное продольное перемещение дистального конца. Когда узел преобразователя подключен к электропитанию, дистальный конец лезвия 3066 может быть выполнен с возможностью перемещения в диапазоне, например, от приблизительно 10 до 500 микрон двойной амплитуды, а предпочтительно в диапазоне от приблизительно 30 до 64 микрон при заданной частоте вибрации, например, 55 кГц.
В одном примере осуществления скальпель 3066 может быть соединен с передающим ультразвук волноводом 3078. Как показано, скальпель 3066 и передающий ультразвук волновод 3078 образованы как единая конструкция из материала, подходящего для передачи ультразвуковой энергии. Примеры таких материалов включают Ti6Al4V (сплав титана, включающий алюминий и ванадий), алюминий, нержавеющую сталь или другие подходящие материалы. В альтернативном варианте осуществления скальпель 3066 может отделяться (и иметь другую композицию) от передающего ультразвук волновода 3078 и может быть присоединен, например, заклепкой, сваркой, клеем, быстрым соединителем или другими подходящими известными способами. Длина передающего ультразвук волновода 3078 может быть, например, по существу равной произведению целого числа на половину длины волны (nλ/2). Передающий ультразвук волновод 3078 предпочтительно может быть изготовлен из твердого ствола-сердечника из материала, подходящего для эффективной передачи ультразвуковой энергии, например, такого как описанный выше титановый сплав (т. е. Ti6Al4V), либо из любого подходящего алюминиевого сплав или иных сплавов.
В некоторых формах хирургический инструмент 10 также может использоваться с другими концевыми эффекторами сшивающего типа. Например, на ФИГ. 78 представлена одна форма линейного сшивающего скобками концевого эффектора 3500, пригодного для применения с хирургическим инструментом 10; Концевой эффектор 3500 содержит участок 3502 упора и канал 3514 для скобок, выполненный с возможностью поступательного перемещения. Канал 3514 для скобок, выполненный с возможностью поступательного перемещения, может перемещаться в дистальном и проксимальном направлениях, указанных стрелкой 3516. Резьбовой приводной ствол 3506 может быть соединен с гнездом 238 выхода, например, как показано выше в настоящем документе, с целью приема поворотного перемещения, создаваемого двигателем 530. Резьбовой приводной ствол 3506 может быть соединен с резьбовой гайкой 3508, неподвижно соединенной с каналом 3514 для скоб таким образом, что поворот резьбового приводного ствола 3506 приводит к поступательному перемещению канала 3514 для скоб в направлениях, указанных стрелкой 3516. Гайка 3508 также может быть соединена с выталкивателем 3510, который в свою очередь может контактировать с кассетой 3512 со скобками. По мере дистального поступательного перемещения выталкиватель 3510 может выталкивать скобки из кассеты 3512 со скобками к упору 3502, тем самым выталкивая скобы через ткань, расположенную между каналом 3514 для скоб и упором 3502.
В некоторых формах хирургический инструмент также может использоваться с круговым сшивающим концевым эффектором. На ФИГ. 79 представлена одна форма кругового сшивающего концевого эффектора 3520, пригодного для применения с хирургическим инструментом 10. Концевой эффектор 3520 содержит упор 3522 и участок 3524 со скобками. Резьбовой приводной ствол 3530 проходит от упора 3522 через участок 3524 со скобками. Резьбовой приводной ствол 3530 может быть соединен с гнездом 238 выхода, например, как показано выше в настоящем документе, с целью приема поворотного перемещения, создаваемого двигателем 530. Резьбовая гайка 3532 может быть соединена с участком 3524 со скобками таким образом, что поворот резьбового приводного ствола 3530 поочередно поступательно перемещает участок 3524 со скобками дистально и проксимально, как указано стрелкой 3534. Резьбовой ствол также может быть соединен с выталкивателем 3528 таким образом, что дистальное перемещение части 3524 со скобками толкает выталкиватель 3528 дистально в кассету 3526 со скобками, чтобы вытолкнуть скобки из кассеты 3526 в ткань, расположенную между упором 3522 и участком 3524 со скобками. В некоторых вариантах осуществления концевой эффектор 3520 также может содержать скальпель или режущий инструмент 3535 для разрезания ткани перед сшиванием.
Следует понимать, что наряду с различными концевыми эффекторами и другие рабочие части в хирургическом инструменте 10 могут быть взаимозаменяемыми. Например, в некоторых формах хирургического инструмента 10 используются разные шнуры питания. На ФИГ. А представлено несколько примеров шнуров питания 3540, 3542, 3544 для применения с хирургическим инструментом. Каждый из шнуров питания 3540, 3542, 3544 содержит гнездо 3546 для соединения с хирургическим инструментом 10. Шнуры питания 3540, 3542, 3544 могут использоваться для соединения хирургического инструмента 10 с различными источниками питания. Например, шнуры питания 3540 и 3542 содержат гнезда 3550, 3552 для соединения с генераторами, например, с генератором модели GEN11 производства Ethicon Endo-Surgery, Inc., г. Цинциннати, штат Огайо. Такой генератор может обеспечивать питание инструмента 10 и/или может обеспечивать сигнал для приведения в действие электрохирургического и/или ультразвукового концевого эффектора. Шнур питания 3544 содержит вилку 3548, которая может быть вставлена в стенную розетку для обеспечения питания инструмента 10 (например, при отсутствии батареи 802).
В некоторых формах хирургический инструмент также может содержать взаимозаменяемые рабочие части, включающие различные стволы. На ФИГ. 81 представлено несколько примеров стволов 3554, 3556, 3558, пригодных для применения с хирургическим инструментом 10. Каждый ствол 3554, 3556, 3558 содержит отсоединяемый приводной патрон 700', 700'', 700''', аналогичный отсоединяемому приводному патрону 700, который может приниматься в инструмент 10, как это описано выше в настоящем документе. Каждый ствол 3554, 3556, 3558 также содержит узел 3557 соединительного элемента для приема концевого эффектора, аналогичный узлу 200 соединительного элемента, описанному выше в настоящем документе. В некоторых вариантах осуществления разные стволы выполнены с возможностью приема разных типов концевых эффекторов в узле 3557 соединительного элемента. Каждый из стволов 3554, 3556, 3558 может содержать разные характеристики, включая например, разную длину, наличие или отсутствие шарнира, пассивный или активный шарнир, разную величину шарнирного поворота, разные диаметры, разную кривизну и т. п. Например, ствол 3554 образует кривую 3559, смещенную от центральной оси ствола. Ствол 3558 образует шарнирное сочленение 3560, которое может шарнирно поворачиваться аналогично тому, как описано выше в настоящем документе применительно к шарнирному сочленению 310.
Следует понимать, что разные виды рабочих частей 100 (например, шнуры питания, стволы, концевые эффекторы и т. п.) требуют разных двигателей и других компонентов хирургического инструмента 10, которые работают по-разному. Например, концевые эффекторы с электропитанием, такие как электрохирургический концевой эффектор 3156 и ультразвуковой концевой эффектор 3026, требуют сигнала подачи энергии для питания электродов и/или ультразвуковых скальпелей. Для активации разных концевых эффекторов также могут требоваться разные перемещения разных двигателей 402, 560, 530, 610, включая, например, активацию разных двигателей, создание разных вращающих моментов и т. п. В различных формах рабочие части 100 могут обеспечивать хирургический инструмент 10 контрольными параметрами.
На ФИГ. 82 представлена блок-схема узла 20 рукоятки хирургического инструмента 10 с обозначением различных управляющих элементов. Управляющие элементы, показанные на ФИГ. 82, выполнены с возможностью приема контрольных параметров от различных рабочих частей и управления хирургическим инструментом 10 на основе принятых контрольных параметров, а также на основе одного или более входных контрольных сигналов, принимаемых от врача (например, посредством управляющего джойстика 840 или другого подходящего активирующего устройства). Управляющие элементы могут содержать управляющую схему 3702 для управления хирургическим инструментом 10. В различных формах управляющая схема 3702 может исполнять алгоритм управления для работы с хирургическим инструментом 10, включая все установленные рабочие части. В некоторых формах управляющая схема 3702 реализована на проксимальной печатной плате 820, описанной выше в настоящем документе. Управляющая схема 3702 содержит микропроцессор 3706 и связанную с ним память и/или устройство 3708 хранения данных. В некоторых формах управляющая схема 3702 также может содержать генераторную схему 3704 для подачи электропитания на ультразвуковое и/или электрохирургическое устройство. Генераторная схема 3704 может действовать как независимый компонент или в сочетании с внешним генератором.
На ФИГ. 82 также показаны двигатели 3714, которые могут соответствовать двигателям 402, 560, 530, 610, описанным выше. Батарея 3713 может соответствовать батарее 802, описанной выше в настоящем документе. Входной сигнал на управляющую схему 3702 может поступать от управляющего джойстика 840 или другого подходящего активирующего устройства. Различные хирургические рабочие части 100, описанные в настоящем документе, могут соединяться с рукояткой 20 через соответствующие гнезда 3710, 3712. Гнездо 3712 может принимать ствол, такой как стволы 3554, 3556, 3558. Например, гнездо 3712 может принимать ствол аналогично тому, как рукоятка 20 принимает отсоединяемый приводной патрон 700, как описано выше в настоящем документе. Гнездо 3710 может быть выполнено с возможностью приема разъема шнура, такого как разъем 3546, описанный выше в настоящем документе.
Управляющая схема 3702 в сочетании с различными другими управляющими элементами, такими как гнезда 3710, 3712 может принимать контрольные параметры от различных установленных рабочих частей. Контрольные параметры могут содержать, например, данные, описывающие свойства рабочих частей, данные, описывающие алгоритмы работы инструмента 10 с установленными рабочими частями и т. п. Гнезда 3710, 3712 могут механически или с помощью линий связи соединяться с различными рабочими частями. Например, различные рабочие части могут содержать схемы 3720 для сохранения контрольных параметров. Такие схемы 3720 показаны соединенными со шнурами питания 3540, 3542, 3544 на ФИГ. 80 и соединенными со стволами 3554, 3556 3558 на ФИГ. 81. Также на ФИГ. 83 представлена одна из форм различных рабочих частей 3730, 3732, 3734, 3736, 3738 концевого эффектора, содержащая схемы 3720, описанные в настоящем документе. Схемы 3720 могут содержать один или более компонентов хранения данных для сохранения контрольных параметров с целью передачи управляющей схеме 3702. Такие компоненты хранения данных могут включать устройство памяти любого подходящего типа (например, электрически стираемая программируемая постоянная память (EEPROM), цифровой регистр, память любого другого типа и т. п.). Устройства памяти также могут содержать катушки или другие аппаратные компоненты, выполненные с возможностью модулирования заданных контрольных параметров, например, в результате запросного сигнала радиочастотной идентификации (RFID). В некоторых формах схемы 3720 образуют прямое проводное соединение с управляющей схемой 3702, например, посредством соответствующих гнезд 3710, 3712. Соответственно, управляющая схема 3702 может напрямую связываться с различными схемами 3720 и принимать контрольные параметры.
В некоторых формах схемы 3720 содержат пассивные или активные устройства RFID. Рукоятка 20 может содержать одну или более антенн 3716, 3718, которые могут располагаться в соответствующих гнездах 3710, 3712 или рядом с ними. С помощью антенн 3716, 3718 управляющая схема 3702 может опрашивать схемы 3720 на установленных рабочих частях и получать контрольные параметры. В некоторых формах управляющая схема 3702 запрограммирована на отправку запросов к различным рабочим частям при запуске и/или при указании на то, что рабочая часть была установлена и/или отсоединена. В ответ управляющая схема 3702 может получать сигнал-отражение от устройства RFID. Сигнал-отражение может указывать важные контрольные параметры. В некоторых формах схемы 3720 могут содержать активные устройства RFID, которые передают данные, описывающие связанные с ними рабочие части, например, после установки.
Как показано на ФИГ. 81, некоторые формы стволов могут содержать антенны 3719 на дистальных частях. Антенны 3719 могут быть связаны с управляющей схемой 3702 посредством проводников (не показаны), направленных через соответствующие стволы, позволяя управляющей схеме 3702 опрашивать схемы устройств RFID 3720 на концевых эффекторах, таких как концевые эффекторы 3730, 3732, 3734, 3736, 3738. В некоторых формах антенны 3718, расположенные в рукоятке, могут принимать и передавать достаточно мощный сигнал для проведения опроса схемы 3720 устройства RFID на концевом эффекторе, не требуя отдельной антенны 379 в стволе. В некоторых конструкциях схемы 3720 могут быть выполнены с возможностью создания проводного соединения с управляющей схемой 3702. Например, антенны 3716, 3718, 3719 могут отсутствовать.
На ФИГ. 84 представлена блок-схема, показывающая одну форму конфигурации 3800 управления, реализуемую управляющей схемой 3702 для управления хирургическим инструментом 10. В соответствии с конфигурацией 3800 управляющая схема 3702 запрограммирована алгоритмом 3802 управления. Алгоритм 3802 управления принимает контрольные параметры от установленных рабочих частей в форме входных переменных 3801. Входные переменные 3801 могут описывать свойства установленной рабочей части. Алгоритм 3802 управления также принимает один или более входных контрольных сигналов 3818 (например, от управляющего джойстика 840, роботизированной системы или другого подходящего активирующего устройства, которым управляет врач). Основываясь на входных переменных 3801, алгоритм 3802 управления может управлять хирургическим инструментом 10, преобразуя один или более входных контрольных сигналов 3818 в выходной сигнал управления двигателем 3814, предназначенный для управления двигателями 3714, и в необязательный выходной сигнал 3816 управления подачей энергии для управления ультразвуковым и/или электрохирургическим концевым эффектором. Следует понимать, что не все формы хирургического инструмента 10 нуждаются в приеме входных переменных от всех перечисленных рабочих частей. Например, некоторые формы хирургического инструмента содержат один ствол и/или фиксированный концевой эффектор. Также в некоторых формах хирургического инструмента (или его конфигурациях) может отсутствовать шнур питания.
Алгоритм 3802 управления может исполнять множество функциональных модулей 3804, 3806, 3810, 3812, относящихся к различным аспектам хирургического инструмента 10. Модуль 3804 пуска может преобразовывать один или более входных контрольных сигналов 3818 в один или более выходных контрольных сигналов 3814 для двигателя, которые управляют соответствующими двигателями 3714 для запуска инструмента 10. Модуль 3806 шарнира может преобразовывать один или более входных контрольных сигналов 3818 в один или более выходных контрольных сигналов 3814 для двигателя, которые поворачивают ствол инструмента 10. Модуль 3812 питания может подавать питание на различные компоненты хирургического инструмента 10 в соответствии с требованиями установленного шнура питания. Для тех форм инструмента 10, в концевом эффекторе которых используется энергия (например, в ультразвуковых и/или электрохирургических инструментах), модуль 3810 энергии может преобразовывать один или более входных контрольных сигналов 3818 в выходные контрольные сигналы 3816 для двигателя, подаваемые на концевой эффектор. Сигналы 3816 управления энергией могут формироваться генератором 3704 и/или внешним генератором (не показан на ФИГ. 84), и могут подаваться на преобразователь 3016 и/или подающие энергию поверхности 3204A, 3204B концевого эффектора.
Различные модули 3804, 3806, 3810, 3812 алгоритма 3802 управления могут использовать контрольные параметры в виде входных переменных 3801 для преобразования одного или более входных контрольных сигналов 3818 в выходные сигналы 3814, 3816. Например, входные переменные 3801, полученные от разных рабочих частей, могут по-разному влиять на алгоритм 3802 управления. Входные переменные 3801, полученные от шнура питания, такого как 3540, 3542, 3544, могут включать, например, тип шнура, соединен ли шнур с внешним объектом, таким как генератор или разъем питания, идентификация внешнего объекта, к которому подключается шнур, и т. п. Один тип шнура питания, такой как шнур 3544, может быть выполнен с возможностью приема энергии от внешнего разъема питания, такого как стенная розетка. Когда управляющая схема 3702 определяет, что установлен шнур питания такого типа (например, в гнездо 3710), модуль 3812 питания может быть запрограммирован на то, чтобы управляющая схема 3702 подавала питание на двигатели 3714 и/или элементы подачи энергии от установленного варианта исполнения шнура. Электропитание, подаваемое через установленный вариант исполнения шнура, может применяться в качестве дополнения или вместо электропитания, подаваемого от батареи 3713.
Другой тип шнура, например 3540 и 3542, может быть выполнен с возможностью связи с внешним генератором. Модуль 3812 питания и/или модуль 3810 энергии может быть выполнен так, чтобы управляющая схема 3702 подавала питание на элемент подачи энергии на основании сигнала о подаче энергии, полученного через установленный шнур питания. Кроме того, модуль 3810 энергии может быть выполнен так, чтобы управляющая схема 3702 подавала входной сигнал на генератор через установленный шнур питания. Такой входной сигнал может включать, например, входной контрольный сигнал 3818, показывающий, что врач запросил подачу энергии. В некоторых формах входные переменные 3801, принятые от шнура питания, также могут указывать тип генератора, соединение с которым предусмотрено (и/или который подключен) такие шнуры питания. Примеры генераторов могут включать независимые электрохирургические генераторы, независимые ультразвуковые генераторы, комбинированные электрохирургические/ультразвуковые генераторы и т. п. В некоторых формах входные переменные 3801, полученные от шнура питания, также могут указывать тип генератора, на соединение с которым рассчитан такой шнур. В некоторых формах указанный тип генератора может влиять на работу алгоритма 3802 управления. Например, разные типы генераторов могут иметь разные управляющие интерфейсы, ожидать поступления разных команд от хирургического инструмента 10 и/или подавать разные выходные сигналы в разных формах.
Если ствол, такой как один из стволов 3554, 3556, 3558, представляет собой съемную рабочую часть, то входные переменные 3801, принятые от ствола, могут указывать на различные характеристики ствола. Такие свойства могут включать, например, длину ствола, положение и степень изгиба ствола (если имеется), параметры, описывающие шарнирное сочленение ствола (если имеется) и т. п. Длину ствола, положение и степень изгиба можно использовать, например, в модуле 3804 пуска и/или модуле 3806 шарнира алгоритма 3802 управления для определения требований к вращающему моменту и/или допусков. Параметры, описывающие шарнирное сочленение ствола, могут указывать или позволять модулю 3806 шарнира генерировать различные перемещения двигателей, необходимые для поворота ствола в различных направлениях. В некоторых вариантах осуществления входные переменные 3801 также могут обозначать степень допустимого шарнирного поворота, которую модуль 3806 шарнира может преобразовать в максимально допустимое перемещение двигателя. В некоторых формах входные переменные 3801, полученные от ствола, также могут указывать, поддерживает ли установленный ствол поворот ствола и/или поворот концевого эффектора. Такие переменные 3801 могут использоваться алгоритмом 3802 управления, чтобы определить, какой двигатель или двигатели 3714 следует активировать для поворота ствола и/или концевого эффектора, а также определить вращающий момент, число оборотов каждого двигателя 3714 и т. п.
Входные переменные 3801, полученные от рабочих частей, концевых эффекторов, могут иметь разные формы на основании типа применяемого концевого эффектора. Например, эндоскопические рассекатели и другие сшивающие концевые эффекторы, такие как описанный выше в настоящем документе концевой эффектор 102, могут предоставлять значения переменных, указывающих длину концевого эффектора (например, линия скоб 45 мм или 60 мм), являются упор и удлиненный канал прямыми или изогнутыми, указывать двигатель 3714, с которым соединяется приводной ствол, такой как приводной ствол 180 и т. п. Такие входные переменные 3801 могут использоваться модулем 3804 пуска для преобразования входных контрольных сигналов 3818, запрашивающих пуск инструмента 10, в выходные сигналы 3814 управления двигателем. Например, длина, изгиб и т. п. концевого эффектора могут определять активируемый двигатель 3714, необходимую величину силы или вращающего момента, необходимое для пуска число оборотов двигателя и т. п. Аналогично входные переменные 3818, принятые от линейных или круговых сшивающих концевых эффекторов, таких как 3500 и 3520, могут использоваться пусковым алгоритмом 3804 для определения активируемого пускового двигателя 3714, необходимой величины силы или вращающего момента в результате различных уровней входного контрольного сигнала 3818, связанного с пуском, числа оборотов двигателя, необходимого для пуска и т. п.
Если концевой эффектор представляет собой эффектор с подачей энергии, например, электрохирургический концевой эффектор 3156 или ультразвуковой концевой эффектор 3026, то принятые входные переменные 3801 могут описывать информацию, связанную с закрывающим перемещением концевого эффектора, а также информацию, описывающую элементы подачи энергии, например, время подачи энергии в контексте пускового такта. Информация, описывающая закрывающее перемещение, может использоваться, например, модулем 3804 пуска для определения того, какой двигатель или двигатели 3714 нужно активировать для пуска и/или втягивания, вращающего момента и числа оборотов для каждого двигателя 3714 и т. п. Информация, описывающая элементы подачи энергии, может использоваться, например, модулем 3810 энергии для генерации выходного сигнала 3816 подачи энергии. Например, модуль 3810 энергии может определить, какой тип сигнала 3816 подачи энергии необходим (например, напряжение, ток и т. п.), может ли сигнал быть генерирован внутренним генератором 3704, следует ли исполнять для сигнала какие-либо блокировки. Например, блокировки могут предотвращать пусковое перемещение, если не осуществляется подача энергии, и/или могут предотвращать подачу энергии, если не осуществляется пусковое перемещение. В некоторых вариантах осуществления модуль 3810 энергии также может определять время выходного сигнала 3816 подачи энергии в контексте пускового такта инструмента. Например, применительно к электрохирургическому концевому эффектору 3156, модуль 3810 энергии может определить, как долго следует активировать подающие энергию поверхности 3204A, 3204B, прежде чем будет продвинут режущий элемент 3210.
На ФИГ. 85 представлена структурная схема одного примера выполнения процесса 3600, реализующего алгоритм 3802 управления с управляющей схемой 3702. В п. 3602 управляющая схема 3702 может принять информацию о наличии рабочей части (например, шнура питания, ствола, концевого эффектора и т. п.). Эта информация может быть генерирована автоматически при установке рабочей части. Например, в тех формах, в которых рабочая часть содержит активное устройство RFID, информацию о наличии рабочей части может предоставить активное устройство RFID. Также в некоторых вариантах осуществления гнездо 3710, 3712, посредством которого рабочая часть соединяется с инструментом 10, может содержать переключатель, указывающий на присутствие рабочей части. В п. 3604 управляющая схема 3702 может запросить у рабочей части входные переменные 3801. Если рабочая часть содержит пассивное устройство RFID, опрос может состоять в облучении устройство RFID радиочастотным сигналом. Если рабочая часть имеет проводную связь с управляющей схемой 3702, то опрос может содержать отправку запроса к устройству памяти, связанному с рабочей частью.
В п. 3606 управляющая схема 3702 может принимать входные переменные 3801 от рабочей части. Входные переменные 3801 могут быть приняты в любой подходящей для этого форме. Например, если рабочая часть содержит пассивное устройство RFID, входные переменные 3801 можно получить путем демодуляции сигнала, возвращенного устройством RFID. Если имеется проводное соединение между рабочей частью и схемой 3702, то входные переменные 3801 можно получить непосредственно от устройства памяти в рабочей части и т. п. В п. 3608 управляющая схема 3702 может применить входные переменные 3801 в алгоритме 3802 управления, например, как описано выше в настоящем документе. Это может повлиять на конфигурацию имеющегося алгоритма 3802 таким образом, чтобы инструмент 10 работал с той рабочей частью или частями, которые были установлены.
На ФИГ. 86 представлена блок-схема, показывающая еще одну форму конфигурации 3900 управления, реализуемую управляющей схемой 3702, для управления хирургическим инструментом 10. В конфигурации 3900 контрольные параметры, полученные из различных рабочих частей, содержат алгоритмы для управления соответствующими рабочими частями. В управляющей схеме 3702 реализован алгоритм-оболочка 3902 управления, содержащий операционную систему 3904. Операционная система 3904 запрограммирована так, чтобы опрашивать установленные рабочие части и принимать контрольные параметры в виде реализующих алгоритмов 3906. Каждый реализующий алгоритм 3906 может описывать способ преобразования входных контрольных сигналов 3908 в выходные сигналы 3910 управления двигателями и выходные сигналы 3912 подачи энергии. Приняв реализующие алгоритмы 3906, операционная система 3904 может исполнять алгоритмы 3906 и работать с инструментом 10.
В некоторых вариантах осуществления операционная система 3904 также может согласовывать различные алгоритмы 3906. Например, реализующий алгоритм 3906, принятый от подающего энергию концевого эффектора, может принимать разные конфигурации, на основании того, связан инструмент с внешним генератором или использует внутренний генератор 3704. Соответственно, операционная система 3904 может настраивать реализующий алгоритм 3906 подающего энергию концевого эффектора на основании того, принят ли реализующий алгоритм 3906 от соответствующего кабеля электропитания, выполненного с возможностью соединения с внешним генератором. Также в некоторых формах допуски и/или число оборотов, необходимое для пуска концевого эффектора, могут зависеть от конфигурации ствола. Соответственно, операционная система 3904 может быть выполнена с возможностью модифицирования реализующего алгоритма 3906, принятого от концевого эффектора, на основании соответствующего реализующего алгоритма 3906, полученного от ствола.
На ФИГ. 87 представлена структурная схема одного примера выполнения процесса 3400, реализующего алгоритм 3902 управления с использованием управляющей схемы 3702. В п. 3402 управляющая схема 3702 может исполнять операционную систему 3904. Операционная система 3904 может программировать управляющую схему 3702 для выполнения различных других действий, описанных в настоящем документе, которые касаются конфигурации 3900 управления. В п. 3404 управляющая схема 3702 может опрашивать одну или более рабочих частей, установленных на хирургическом инструменте 10, например, как описано в настоящем документе. В п. 3406 управляющая схема 3702 может получать реализующие алгоритмы 3906, как описано в настоящем документе. В п. 3408 управляющая схема 3702 может применять принятые алгоритмы 3906 для работы с хирургическим инструментом. Применение принятых алгоритмов 3906 может включать, например, согласование алгоритмов 3906, как описано выше в настоящем документе.
На ФИГ. 88 и 89 представлена одна форма хирургического инструмента 4010, содержащая модуль 4004 анализа, который размещен в концевом эффекторе 4002. В некоторых формах хирургический инструмент 4010 может быть аналогичен хирургическому инструменту 10, а концевой эффектор 4002 может быть аналогичен концевому эффектору 102, которые были описаны выше. Модуль 4004 анализа может быть выполнен с возможностью измерения одного или более состояний концевого эффектора 4002. Например, в одном варианте конструкции модуль 4004 анализа может содержать модуль анализа толщины ткани, который определяет толщину ткани, зажатой в концевом эффекторе 4002 между кассетой 130 со скобками и узлом 190 упора. Модуль 4004 анализа может быть выполнен с возможностью генерации беспроводного сигнала, служащего показателем одного или более измеренных состояний концевого эффектора 4002. В соответствии с одним вариантом осуществления, как показано на ФИГ. 89, модуль 4004 анализа может быть размещен на дистальном конце концевого эффектора 4002 таким образом, чтобы модуль 4004 анализа не препятствовал прохождению скоб из кассеты 130 со скобками при пуске скоб. В различных формах модуль 4004 анализа может содержать датчик, радиомодуль и источник питания. См. ФИГ. 90. Датчик может находиться на дистальном конце концевого эффектора 4002 (как показано на ФИГ. 89), на шарнирном сочленении 310 с электропитанием или в любой другой подходящей части рабочей части 100.
В различных конструкциях датчик может представлять собой любой подходящий датчик для обнаружения одного или более состояний концевого эффектора 4002. Например и без ограничений, датчик, который размещен на дистальном конце концевого эффектора 4002, может содержать датчик толщины ткани, такой как датчик Холла или герконовый переключатель, оптический датчик, магнитно-индуктивный датчик, силовой датчик, датчик давления, датчик с пьезорезистивной пленкой, ультразвуковой датчик, вихретоковый датчик, акселерометр, датчик пульсовой оксиметрии, температурный датчик, датчик, выполненный с возможностью обнаружения электрических характеристик пути через ткань (например, емкости или сопротивления) или любую их комбинацию. В качестве еще одного примера и без ограничений, датчик, который размещен на шарнирном сочленении 310 с электропитанием, может содержать потенциометр, емкостный датчик (скользящий потенциометр), датчик с пьезорезистивной пленкой, датчик давления или датчик любого другого подходящего типа. В некоторых конструкциях модуль 4004 анализа может содержать множество датчиков, размещенных во множестве мест концевого эффектора 4002. Модуль 4004 анализа дополнительно может содержать один или более визуальных маркеров для обеспечения пользователя визуальной индикацией, например, посредством видеосигнала, о текущем состоянии концевого эффектора 4002.
Модуль 4004 анализа может содержать радиомодуль, выполненный с возможностью генерации и передачи беспроводного сигнала, служащего показателем измеренного состояния концевого эффектора 4002. См. ФИГ. 90. Радиомодуль может содержать антенну, выполненную с возможностью передачи беспроводного сигнала на первой частоте. Мощность передачи в модуле 4004 анализа может быть ограничена размерами антенны и источника питания, пригодных для размещения в модуле 4004 анализа. Размер концевого эффектора 4002 может ограничивать доступное пространство для размещения антенны или источника питания, имеющих достаточную мощность для передачи сигнала из модуля 4004 анализа в удаленную точку, например, к видеомонитору 4014. Ввиду ограниченного размера антенны и низкой мощности, поставляемой источником питания на модуль 4004 анализа, модуль 4004 анализа может генерировать сигнал низкой мощности 4006, который можно передавать на короткие расстояния. Например, в некоторых формах модуль 4004 анализа может передавать сигнал от концевого эффектора 4002 к ретрансляционной станции 4008, размещенной проксимально от концевого эффектора 4002. Например, ретрансляционная станция 4008 может размещаться в рукоятке 4020 инструмента 4010, в стволе 4030 (например, в проксимальной части ствола 4030) и/или в имплантируемом устройстве, расположенном снаружи или внутри тела пациента.
Ретрансляционная станция 4008 может быть выполнена с возможностью приема сигнала низкой мощности 4006 от модуля 4004 анализа. Сигнал 4006 низкой мощности ограничен размерами антенны и источника питания, которые можно разместить в концевом эффекторе 4002 в составе модуля 4004 анализа. Ретрансляционная станция 4008 может быть выполнена с возможностью приема сигнала 4006 низкой мощности и ретрансляции полученного сигнала в виде сигнала 4012 высокой мощности. Сигнал 4012 высокой мощности может быть передан в удаленную сеть или устройство, такое как видеомонитор 4014, выполненный с возможностью отображения графического представления измеренного состояния концевого эффектора 4002. Хотя модуль 4004 анализа и ретрансляционная станция 4008 по существу описаны применительно к хирургическому инструменту 4010, специалисту в данной области будет понятно, что конструкцию с модулем 4004 анализа и ретрансляционной станцией 4008 можно применять с любой подходящей хирургической системой, например, такой как роботизированная хирургическая система. Например, ретрансляционная станция 4008 может располагаться в стволе и/или в рабочей части роботизированного хирургического инструмента. Подходящая роботизированная хирургическая система описана в заявке на патент США № 13/538,700, озаглавленной «Хирургические инструменты с шарнирными стволами», которая полностью включается в настоящий документ путем ссылки.
В некоторых формах видеомонитор 4014 может содержать независимый блок для отображения измеренного состояния концевого эффектора 4002, стандартный монитор для просмотра для применения при эндоскопической, лапароскопической или открытой хирургии, или любой другой подходящий монитор. Отображаемое графическое представление может выводиться поверх видеопотока или другой информации, отображаемой на видеомониторе. В некоторых формах сигнал 4012 высокой мощности может прерывать трансляцию на видеомониторе 4014 и заставлять видеомонитор отображать только графическое представление измеренного состояния концевого эффектора 4002. Модуль 4015 приемника может взаимодействовать с видеомонитором 4014, позволяя видеомонитору 4014 принимать сигнал 4012 высокой мощности от ретрансляционной станции 4008. В некоторых конструкциях модуль 4015 приемника может быть образован как часть видеомонитора 4014. Сигнал 4012 высокой мощности может передаваться беспроводным способом и/или через проводное соединение. Сигнал 4012 высокой мощности может приниматься глобальной сетью (WAN), локальной сетью (LAN) или любой другой подходящей сетью или устройством.
В некоторых формах видеомонитор 4014 может выводить изображение на основании данных, содержащихся в принятом сигнале 4012 высокой мощности. Например, врач может в реальном времени видеть данные, характеризующие толщину зажатой ткани, в течение всей процедуры, связанной с использованием хирургического инструмента 4010. Видеомонитор 4014 может представлять собой монитор, например, монитор с электронно-лучевой трубкой (ЭЛТ), плазменный монитор, жидкокристаллический (ЖК) монитор или любой другой подходящий монитор для визуального отображения. Видеомонитор 4014 может отображать графическое представление состояния концевого эффектора 4002 на основании данных, содержащихся в принятом сигнале 4012 высокой мощности. Видеомонитор 4014 может отображать состояние концевого эффектора 4002 любым подходящим способом, например, с наложением графического представления состояния концевого эффектора на видеопоток или иную информацию, отображаемую на видеомониторе 4014. В некоторых формах видеомонитор 4014 может быть выполнен с возможностью отображения только тех данных, которые приняты с сигналом 4012 высокой мощности. Аналогично сигнал 4012 высокой мощности может быть принят компьютерной системой (не показана). Компьютерная система может содержать радиочастотный модуль (например, модуль 4015 приемника) для связи с ретрансляционной станцией 4008. Компьютерная система может сохранять данные, полученные с сигналом 4012 высокой мощности, в устройстве памяти (например, в ПЗУ или на жестком диске) и может обрабатывать данные с помощью процессора.
В некоторых формах ретрансляционная станция 4008 усиливает мощность сигнала 4006 низкой мощности до сигнала 4012 высокой мощности, не внося никаких иных изменений в сигнал 4006 низкой мощности. Ретрансляционная станция 4008 может быть выполнена с возможностью ретрансляции сигнала 4012 высокой мощности к удаленной сети или устройству. В некоторых конструкциях ретрансляционная станция 4008 может изменять или обрабатывать принятый сигнал 4006 низкой мощности перед ретрансляцией сигнала 4012 высокой мощности. Ретрансляционная станция 4008 может быть выполнена с возможностью преобразования принятого сигнала первой частоты, переданной модулем 4004 анализа, во вторую частоту, пригодную для приема удаленной сетью или устройством, например, видеомонитором 4014. Например, в одном варианте конструкции модуль 4004 анализа может передавать сигнал 4006 низкой мощности с применением первой частоты, которая представляет собой частоту, проникающую через ткани тела человека. Частота, проникающая через ткани человека, может представлять собой частоту, генерированную с возможностью прохождения через ткани человека с минимальным затуханием сигнала. Например, можно выбрать частоту за пределами полосы поглощения водой, чтобы снизить затухание сигнала в ткани человека (которая может содержать высокую долю воды). Например, модуль 4004 анализа может применять диапазон частот службы связи с медицинским имплантатом (Medical Implant Communication Service, MICS) (402-405 МГц), подходящий промышленный, научный или медицинский (ISM) радиодиапазон (такой как несущая частота 433 МГц или несущая частота 915 МГц), частоту связи в ближней зоне (13,56 МГц), частоту связи Bluetooth (2,4 ГГц), ультразвуковую частоту или любую другую подходящую проникающую через ткани тела человека частоту или диапазон. Ретрансляционная станция 4008 может принимать сигнал 4006 низкой мощности первой частоты. Ретрансляционная станция 4008 может преобразовывать сигнал 4006 низкой мощности из первой частоты во вторую частоту, подходящую для передачи по воздуху на большие расстояния. Ретрансляционная станция 4008 может применять любую подходящую частоту для передачи сигнала 4012 высокой мощности, такую как, например, частота Wi-Fi (2,4 ГГц или 5 ГГц).
В некоторых формах ретрансляционная станция 4008 может преобразовывать принятый сигнал 4006 низкой мощности из первого протокола связи во второй протокол связи перед передачей сигнала 4012 высокой мощности. Например, модуль 4004 анализа может передавать сигнал 4006 низкой мощности, применяя первый протокол связи, например, такой как протокол связи в ближней зоне (NFC), протокол связи Bluetooth, собственный протокол связи или любой другой подходящий протокол связи. Ретрансляционная станция 4008 может принимать сигнал 4006 низкой мощности, применяя первый протокол связи. Ретрансляционная станция 4008 может содержать модуль преобразования протоколов для преобразования принятого сигнала из первого протокола связи во второй протокол связи, например, в TCP/IP, UDP или в любой другой подходящий протокол связи.
На ФИГ. 90 представлена блок-схема, показывающая модуль 4104 анализа, который представляет пример конструкции модуля 4004 анализа, описанного выше в настоящем документе. Модуль 4104 анализа может содержать датчик 4116, контроллер 4118, радиомодуль 4124 и источник энергии 4126. Контроллер 4118 может содержать блок 4120 процессора и устройство памяти 4122. Датчик 4116 может находиться на дистальном конце концевого эффектора 4002 (как показано на ФИГ. 89), на шарнирном сочленении 310 или в любой другой подходящей части рабочей части 100. В различных формах датчик 4116 может содержать любой подходящий датчик для обнаружения одного или более состояний концевого эффектора.
В некоторых конструкциях датчик 4116 может содержать датчик толщины ткани, например, такой как датчик Холла. Датчик толщины ткани может обнаруживать толщину ткани, зажатой в концевом эффекторе 4002, на основании величины магнитного поля, генерируемого магнитом 4042, который размещен, например, на дистальном конце узла 190 упора. См. ФИГ. 89. Когда врач закрывает узел 190 упора, магнит 4042 поворачивается вниз и приближается к модулю 4004 анализа, таким образом изменяя магнитное поле, обнаруженное модулем 4004 анализа, по мере поворота узла 190 упора в закрытое (или зажатое) положение. Сила магнитного поля магнита 4042, определяемая модулем 4004 анализа, характеризует расстояние между каналом 130 и узлом 190 упора, которое в свою очередь характеризует толщину ткани, зажатой между каналом 130 и узлом 190 упора, при переводе концевого эффектора 4002 в закрытое (или зажатое) положение.
Модуль 4104 анализа может быть выполнен с возможностью генерации беспроводного сигнала, служащего показателем измеренного состояния концевого эффектора. Беспроводной сигнал может быть генерирован радиомодулем 4124. В некоторых формах передаваемая мощность радиомодуля 4124 ограничена размером антенны, встроенной в радиомодуль 4124, и размером источника питания 4126, размещенного в модуле 4104 анализа. Размер концевого эффектора 4002 может ограничивать доступное пространство для размещения антенны или источника питания 4126, имеющих достаточную мощность для передачи сигнала от датчика 4116 в удаленное место, например, к видеомонитору 4014. Учитывая ограничения антенны и низкую мощность, доставляемую источником питания 4126, радиомодуль 4124 может генерировать только сигнал 4006 низкой мощности, который возможно передать на короткие расстояния, например, на расстояние до проксимального конца ствола 4030. Например, в одной форме радиомодуль 4124 может передавать сигнал 4006 низкой мощности от концевого эффектора 4002 к рукоятке 4020 хирургического инструмента 4010. В некоторых конструкциях для генерации сигнала 4006 низкой мощности можно использовать источник питания 4126, способный доставлять более высокую мощность, с целью продления времени работы хирургического инструмента 4010.
Устройство памяти 4122 контроллера 4118 может включать один или несколько твердотельных накопителей постоянного запоминающего устройства (ПЗУ) и (или) оперативного запоминающего устройства (ОЗУ). В различных конструкциях процессор 4120 и устройство (-а) памяти 4122 могут быть встроены в одну интегральную схему (ИС) или могут находиться в разных ИС. Устройство ПЗУ может представлять собой флеш-память. В устройстве (-ах) ПЗУ может храниться код с командами для выполнения процессором 4120 контроллера 4118. Кроме того, в устройстве (-ах) ПЗУ 4122 могут храниться данные, указывающие тип кассеты 130. Так, например, в устройстве (-ах) ПЗУ 4122 могут храниться данные с указанием типа модели кассеты 130 со скобками. В некоторых конструкциях контроллер в рукоятке 4020 хирургического инструмента 4010 может использовать информацию о состоянии и модели кассеты 130 со скобками для обнаружения правильности работы хирургического инструмента 4010. Например, модуль 4004 анализа может быть выполнен с возможностью измерения толщины ткани. Информацию о толщине ткани и модели кассеты можно применять для определения того, не является ли ткань, зажатая в концевом эффекторе 4002, слишком толстой или слишком тонкой, на основании заданного диапазона толщины ткани для конкретного кассеты 130 со скобками. Радиомодуль 4124 может представлять собой маломощный радиомодуль для двухсторонней беспроводной связи с ретрансляционной станцией 4008, расположенной в рукоятке 4020 инструмента 4010, применяя протокол беспроводной передачи данных. Радиомодуль 4124 может содержать любую антенну, подходящую для передачи сигнала 4006 низкой мощности. Например, радиомодуль 4124 может содержать симметричную антенну, полуволновую симметричную антенну, несимметричную антенну, антенну для связи в ближней зоне или любую другую антенну, подходящую для передачи сигнала 4006 низкой мощности. Размер антенны и, следовательно, доступная мощность и частоты передачи могут ограничиваться размером концевого эффектора 4002.
В соответствии с различными формами радиомодуль 4124 может связываться с ретрансляционной станцией 4008, применяя частоту, проникающую через ткани тела человека. Например, связь между радиомодулем 4124 и ретрансляционной станцией 4008 может применять диапазон частот службы связи с медицинским имплантатом (Medical Implant Communication Service, MICS) (402-405 МГц), подходящий промышленный, научный или медицинский (ISM) радиодиапазон (такой как несущая частота 433 МГц или несущая частота 915 МГц), частоту связи в ближней зоне (13,56 МГц), частоту связи Bluetooth (2,4 ГГц), ультразвуковую частоту или любую другую подходящую проникающую через ткани тела человека частоту или диапазон. Источник питания 4126 может представлять собой подходящую батарею для подачи энергии на компоненты модуля 4004 анализа, например, ионно-литиевую батарею или какую-либо другую подходящую батарею.
В некоторых формах компоненты модуля 4104 анализа могут размещаться в концевом эффекторе 4002, на стволе 4030 или в любом другом подходящем месте хирургического инструмента 4010. Например, датчик 4116 может размещаться на дистальном конце концевого эффектора 4002. Контроллер 4118, радиомодуль 4124 и источник питания 4126 могут размещаться на стволе 4030. Один или более проводов могут соединять датчик 4116, контроллер 4118, радиомодуль 4124 и источник питания 4126. В некоторых формах функции концевого эффектора 4002 и ствола 4030 могут ограничивать размещение модуля 4104 анализа. Например, в одной показанной форме концевой эффектор 4002 выполнен с возможностью шарнирного поворота и поворота в шарнирном сочленении 310 с электропитанием. Размещение проводов над шарнирным сочленением 310 с электропитанием может приводить к перекручиванию и перегибанию проводов и может мешать действию шарнирного сочленения 310 с электропитанием. Размещение компонентов модуля 4004 анализа может быть ограничено местами, находящимися дистально от шарнирного сочленения 310 с электропитанием, чтобы предотвратить затруднение действий шарнирного сочленения 310 или модуля 4004 анализа.
В некоторых конструкциях модуль 4104 анализа может содержать аналогово-цифровой преобразователь (АЦП) 4123. Датчик 4116 может генерировать аналоговый сигнал, представляющий состояние концевого эффектора 4002. Для беспроводной передачи сигнала, представляющего состояние концевого эффектора 4002, может потребоваться преобразование аналогового сигнала в цифровой сигнал. Аналоговый сигнал, производимый датчиком 4116, можно преобразовать в цифровой сигнал посредством АЦП 4123, прежде чем генерировать и передавать сигнал 4006 низкой мощности. АЦП 4123 может быть включен в контроллер 4118 или может представлять собой отдельный контроллер, например, такой как микропроцессор, программируемая вентильная матрица или любая другая подходящая схема АЦП.
На ФИГ. 91 представлена блок-схема, показывающая ретрансляционную станцию 4208, которая представляет один пример конструкции ретрансляционной станции 4008, описанной выше в настоящем документе. Ретрансляционная станция 4208 может размещаться проксимально от ствола, так например, в непосредственной близости от батареи 4226, и может быть отделена от модуля 4004 анализа в концевом эффекторе 4002, например, стволом 4030. Например, ретрансляционная станция 4208 может размещаться в рукоятке 4020 хирургического инструмента 4010. Таким образом, ретрансляционная станция 4208 может принимать беспроводной сигнал от модуля 4004 анализа. Ретрансляционная станция 4208 может представлять собой разъемный модуль, который может избирательно соединяться с рукояткой 4020 хирургического инструмента 4002.
Как показано на ФИГ. 91, ретрансляционная станция 4208 может содержать радиомодуль 4228 и усилительный модуль 4230. В некоторых конструкциях радиомодуль 4228 выполнен с возможностью приема сигнала 4006 низкой мощности. Сигнал 4006 низкой мощности может передаваться от модуля 4004 анализа и служить показателем состояния концевого эффектора 4002. Радиомодуль 4228 ретрансляционной станции 4208 принимает сигнал 4006 низкой мощности и подает сигнал 4006 низкой мощности на усилительный модуль 4230. Усилительный модуль 4230 может усиливать сигнал 4006 низкой мощности до сигнала 4012 высокой мощности, подходящего для передачи на более дальние расстояния, чем сигнал 4006 низкой мощности. После усиления принятого сигнала 4006 низкой мощности до сигнала 4012 высокой мощности усилительный модуль 4230 может передать сигнал 4012 высокой мощности на радиомодуль 4228 для передачи в удаленную сеть или устройство, например, такое как видеомонитор 4014. Усилительный модуль 4230 может содержать любую подходящую усилительную схему, например, транзистор, операционный усилитель, полностью дифференциальный усилитель или любой другой подходящий усилитель сигнала.
На ФИГ. 92 представлена блок-схема, показывающая ретрансляционную станцию 4308, которая представляет еще один пример конструкции ретрансляционной станции 4008, описанной выше в настоящем документе. В представленной форме ретрансляционная станция 4308 содержит радиомодуль 4328, усилительный модуль 4330 и модуль 4336 обработки. Усилительный модуль 4330 может усиливать принятый сигнал 4006 низкой мощности перед обработкой модулем 4336 обработки, после обработки принятого сигнала 4006 низкой мощности модулем 4336 обработки, либо как перед, так и после обработки модулем 4336 обработки. Радиомодуль 4328 может содержать модуль 4332 приемника и передающий модуль 4334. В некоторых формах модуль 4332 приемника и передающий модуль 4334 могут быть объединены в модуль приемопередатчика сигнала (не показан). Модуль 4332 приемника может быть выполнен с возможностью приема сигнала 4006 низкой мощности от модуля 4004 анализа. Модуль 4332 приемника может подавать принятый сигнал 4006 низкой мощности на модуль 4336 обработки.
В представленном варианте осуществления модуль 4336 обработки содержит модуль 4338 преобразования частоты и модуль 4340 преобразования протокола. Модуль 4338 преобразования частоты может быть выполнен с возможностью преобразования принятого сигнала 4006 низкой мощности из первой частоты во вторую частоту. Например, модуль 4004 анализа может передавать сигнал 4006 низкой мощности с применением первой частоты, подходящей для передачи через ткани тела человека, такой как частота MICS или ISM. Модуль 4332 приемника может принимать сигнал 4006 низкой мощности первой частоты. Модуль 4338 преобразования частоты может преобразовывать сигнал 4006 низкой мощности из первой частоты во вторую частоту, подходящую для передачи по воздуху на большие расстояния. Модуль 4338 преобразования частоты может преобразовывать принятый сигнал 4006 низкой мощности в любую частоту, подходящую для передачи сигнала высокой мощности, например, такую как частота Wi-Fi (2,4 ГГц или 5 ГГц).
Модуль 4340 преобразования протоколов может быть выполнен с возможностью преобразования принятого сигнала из первого протокола связи во второй протокол связи. Например, модуль 4004 анализа может передавать сигнал 4006 низкой мощности, применяя первый протокол связи, например, такой как протокол связи в ближней зоне (NFC), протокол связи Bluetooth, собственный протокол связи или любой другой подходящий протокол связи. Ретрансляционная станция 4308 может принимать сигнал 4006 низкой мощности, применяя первый протокол связи. Ретрансляционная станция 4308 может содержать модуль 4340 преобразования протоколов для преобразования принятого сигнала 4006 низкой мощности из первого протокола связи во второй протокол связи, например, в протокол TCP/IP, Bluetooth или в любой другой подходящий протокол связи. Модуль 4336 обработки, включающий модуль 4338 преобразования частоты и модуль 4340 преобразования протоколов, может содержать один или более микропроцессоров, программируемых вентильных матриц, интегральных схем, любых других подходящих контроллеров или любую их комбинацию.
В некоторых формах модуль 4338 преобразования частоты и/или модуль 4340 преобразования протоколов могут быть программируемыми. Сети, видеомониторы или другое приемное оборудование могут быть выполнены с возможностью приема сигналов заданной частоты и заданного протокола. Например, локальная сеть (LAN) может быть выполнена с возможностью приема беспроводного сигнала с применением беспроводного стандарта 802.11, который требует передачи с частотой 2,4 ГГц или 5 ГГц и применения протокола связи TCP/IP. Пользователь может выбрать стандарт беспроводной связи 802.11 из множества стандартов связи, сохраненных в ретрансляционной станции 4308. В ретрансляционную станцию 4308 может быть включен модуль памяти для сохранения множества стандартов связи. Пользователь может выбрать стандарт связи для сигнала 4012 высокой мощности из множества стандартов связи, сохраненных в модуле памяти. Например, пользователь может выбрать стандарт связи 802.11 в качестве стандарта связи для передачи сигнала 4012 высокой мощности. Если стандарт связи выбирается пользователем, то модуль 4338 преобразования частот или модуль 4340 преобразования протоколов можно запрограммировать посредством модуля памяти на преобразование принятого сигнала 4006 низкой мощности в выбранный стандарт связи путем преобразования частоты или протокола связи принятого сигнала 4006 низкой мощности. В некоторых конструкциях ретрансляционная станция 4308 может автоматически обнаруживать надлежащую частоту и протокол связи для приема сигнала 4006 низкой мощности или передачи сигнала 4012 высокой мощности. Например, ретрансляционная станция 4308 может обнаруживать сеть беспроводной связи в больнице. Ретрансляционная станция 4308 может автоматически запрограммировать модуль 4338 преобразования частот и модуль 4340 преобразования протоколов для преобразования принятого сигнала 4006 низкой мощности в надлежащие частоту и протокол для передачи сигнала 4012 высокой мощности в больничную сеть беспроводной связи.
В представленной форме модуль 4336 обработки может подавать обработанный сигнал на усилительный модуль 4330 для усиления обработанного сигнала до сигнала 4012 высокой мощности перед передачей. Усилительный модуль 4330 может усиливать обработанный сигнал до уровня, подходящего для передачи передающим модулем 4334. Усилительный модуль 4330 может содержать любую подходящую усилительную схему, например, транзистор, операционный усилитель, полностью дифференциальный усилитель или любой другой подходящий электронный усилитель. Усилительный модуль 4330 может содержать батарею (не показана) и может быть подключен к источнику питания 4326, находящемуся внутри рукоятки 4020 хирургического инструмента 4010. Усилительный модуль 4330 может быть программируемым для обеспечения одного или более уровней усиления в результате выбора конкретного типа связи.
Усилительный модуль 4330 может подавать сигнал 4012 высокой мощности на передающий модуль 4334. Хотя радиомодуль 4328, модуль 4336 обработки и усилительный модуль 4330 показаны в виде отдельных модулей, специалисту в данной области будет понятно, что любые или все показанные модули могут объединяться в одну интегральную схему или множество интегральных схем.
На ФИГ. 93 представлен один вариант осуществления способа ретрансляции сигнала, отражающего состояние концевого эффектора 4400. Способ 4400 может включать генерацию 4402, посредством модуля анализа (например, описанного в настоящем документе модуля 4004 анализа) сигнала, отражающего состояние концевого эффектора, такого как концевой эффектор 4002. Сигнал может представлять любое измеряемое состояние концевого эффектора 4002, например, такое как толщина ткани, зажатой в концевом эффекторе 4002. Модуль анализа может генерировать сигнал с помощью датчика, например, такого как датчик 4116 модуля 4104 анализа, показанный на ФИГ. 90. Способ 4400 может дополнительно включать передачу 4404 посредством радиомодуля, генерированного сигнала в виде сигнала низкой мощности. Например, радиомодуль 4124, показанный на ФИГ. 90, может передавать сигнал 4006 низкой мощности. На практике передаваемая радиомодулем мощность может быть ограничена размерами антенны и источника питания, которые можно разместить в модуле 4002 анализа. Учитывая ограниченное пространство, мощность передачи радиомодуля может ограничиваться сигналом 4006 низкой мощности. Сигнал 4006 низкой мощности может быть передан радиомодулем с таким уровнем мощности, который позволяет принять сигнал 4006 низкой мощности при помощи ретрансляционной станции 4008 в рукоятке 4020 хирургического инструмента 4010.
Способ ретрансляции сигнала, показывающего состояние концевого эффектора 4400, может дополнительно включать прием 4406 сигнала низкой мощности ретрансляционной станцией, например, ретрансляционной станцией 4008. После приема сигнала низкой мощности ретрансляционная станция может преобразовывать 4408 сигнал низкой мощности в сигнал высокой мощности, например, в такой как сигнал 4012 высокой мощности. Преобразование сигнала низкой мощности в сигнал высокой мощности может содержать усиление сигнала низкой мощности посредством усилительного модуля, такого как усилительный модуль 4230, показанный на ФИГ. 91. Преобразование сигнала низкой мощности в сигнал высокой мощности также может содержать преобразование стандарта связи сигнала низкой мощности в стандарт связи, подходящий для передачи сигнала высокой мощности. Например, способ 4400 может включать преобразование 4408 принятого сигнала низкой мощности из первой частоты во вторую частоту посредством модуля обработки.
После преобразования 4408 сигнала низкой мощности в сигнал высокой мощности способ 4400 может дополнительно включать передачу 4410 сигнала высокой мощности посредством ретрансляционной станции в удаленное место, например, на такое как экран просмотра операционной или в больничную сеть. Сигнал высокой мощности может быть принят 4412 на экран просмотра, который может выводить графическое представление состояния концевого эффектора для пользователя. В некоторых конструкциях способ может включать выбор пользователем частоты и/или протокола связи для сигнала высокой мощности перед преобразованием сигнала низкой мощности. Частоту и протокол связи можно выбрать из множества частот, хранящихся в модуле памяти ретрансляционной станции.
Электромеханический мягкий упор
В различных формах в хирургическом инструменте может использоваться механический упор, выполненный с возможностью остановки или замедления элемента с двигательным приводом в конце или близко к концу такта выталкивания. В соответствии с различными формами механический упор может содержать твердый упор, выполненный с возможностью резкого прерывания перемещения приводного элемента, и/или мягкий упор, выполненный с возможностью замедления приводного элемента, в конце или вблизи от конца такта. Как описано ниже более подробно, в некоторых формах такие инструменты могут включать электромеханический упор, содержащий механический упор и управляющую систему, выполненную с возможностью измерения и/или отслеживания тока, подаваемого на двигатель, который приводит в перемещение приводной элемент. В одной форме управляющая система выполнена с возможностью прекращения подачи электропитания на двигатель или иного расцепления работы двигателя и перемещения приводного элемента после определения того, что ток соответствует заданным параметрам.
Следует понимать, что для краткости и простоты описания различные аспекты описанных в настоящем документе механических и электромеханических упоров излагаются по существу по отношению к хирургическим инструментам и связанным с ними приводным элементам, содержащим режущие и скрепляющие устройства. Однако специалисту в данной области будет понятно, что настоящее описание не имеет таких ограничений и что различные механические упоры и связанные с ними электромеханические элементы, описанные в настоящем документе, могут быть применены в различных других устройствах, известных в данной области. Например, тогда как дополнительные области применения станут более очевидны далее, различные механические упоры, описанные в настоящем документе, могут использоваться в любых устройствах, таких как содержащие электродвигатель и/или управляющую или приводную систему, а также, помимо эндоскопических хирургических инструментов, например, в лапароскопических инструментах. Снова обратимся к ФИГ. 1-6, на которых представлен электромеханический хирургический инструмент 10, оснащенный одной формой механического упора в соответствии с одним аспектом. Узел рукоятки 20 функционально соединен с узлом 30 удлиненного ствола, дистальный участок которого функционально соединен с концевым эффектором 102. Концевой эффектор 102 содержит проксимальный конец 103 и дистальный конец 104. Как описано выше, удлиненный элемент 110 с каналом может быть выполнен с возможностью функциональной и разъемной установки в него кассеты 130 со скобками, а узел 190 упора может быть выполнен с возможностью избирательного перемещения относительно кассеты 130 со скобками между открытым положением (см. ФИГ. 4) и закрытым положением (см. ФИГ. 6) для захвата ткани между ними.
В некоторых формах инструмент 10 содержит приводной элемент, который может представлять собой любую часть или компонент инструмента 10, выполненный возможностью перемещения под воздействием двигателя. В различных формах приводной элемент может включать узел 30 удлиненного ствола, концевой эффектор 102 и один или более их компонентов или частей, таких как салазки 170 или режущий ткань элемент 160, часть 162 кожуха которого может быть насажена посредством резьбы на приводной винт 180 концевого эффектора таким образом, чтобы удерживаться с возможностью поворота внутри удлиненного канала 110. Как описано выше, салазки 170 могут поддерживаться с возможностью перемещения по оси относительно приводного винта 180 концевого эффектора и могут быть выполнены с возможностью взаимодействия с участком 162 кожуха режущего ткань элемента 160. Приводной винт 180 концевого эффектора может поддерживаться с возможностью поворота внутри удлиненного канала 110, как описано выше. Поворот приводного винта 180 концевого эффектора в первом направлении заставляет режущий ткань элемент 160 перемещаться в дистальном направлении в ходе такта выталкивания. При выталкивании режущего ткань элемента 160 дистально в ходе такта выталкивания салазки 170 выталкиваются дистально режущим ткань элементом 160. В различных формах кассета 130 со скобками может быть оснащен механическим упором, содержащим мягкий упор. В соответствии с одним аспектом мягкий упор содержит один или более амортизаторов 174 для смягчения упора салазок 170 при достижении ими конца такта вблизи от самого дистального положения внутри удлиненного канала 110. Каждый из амортизаторов 174 может быть связан с гасящим элементом 175, таким как пружина 176, придающим амортизатору нужную меру смягчения.
Как описано выше более подробно, салазки 170 и режущий ткань элемент 160 выполнены с возможностью перемещения по такту выталкивания вдоль оси ствола A-A, направленной от проксимального конца 103 концевого эффектора 102 к дистальному концу 104 концевого эффектора 102 для одновременного разрезания и сшивания ткани. Изображенный концевой эффектор 102 выполнен с возможностью работы в качестве эндоскопоческого рассекателя для зажатия, рассечения и сшивания ткани; при этом в других аспектах можно применять другие типы концевых эффекторов, такие как концевые эффекторы для других типов хирургических устройств, такие как эффекторы, рассекатели, сшивающие инструменты, клипсонакладыватели, устройства доступа, устройства для введения медикаментов и генной терапии, ультразвуковые, РЧ или лазерные устройства и т. п.
Как показано на ФИГ. 94, где представлен дистальный конец 104 концевого эффектора 102, показанного на ФИГ. 1-6, приводной элемент 158, содержащий салазки 170 и режущий элемент 160, выполнен с возможностью перемещения по такту выталкивания вдоль оси ствола A-A между проксимальным исходным положением и дистальным положением конца такта. В одном аспекте положение конца такта находится между первым и вторым положениями S1, S2 (см. ФИГ. 97 и 78). В различных формах исходное положение и/или положение конца такта включает механический упор, такой как твердый упор или мягкий упор, который может физически затруднять, например, блокировать или ограничивать дальнейшее продольное перемещение за пределы положения соответствующего упора. В одной форме механический упор содержится как в исходном положении, так и в положении конца такта. Как показано, приводной элемент 158 перед концом такта или вблизи от него расположен дистально.
Как описано выше, в хирургическом инструменте 10 может использоваться управляющая система, которая управляет одним или более двигателями и связанными с ними приводными компонентами, как описано выше. На ФИГ. 95 представлена схема, изображающая одну форму системы, содержащей управляющую систему 1400, приводной двигатель 1402 и источник питания 1404, для применения с хирургическим инструментом, использующим электромеханический упор, который может включать механический мягкий или твердый упор в соответствии с различными аспектами. Хирургическая система содержит источник питания 1404, функционально соединенный с приводным двигателем 1402 посредством управляющей системы 1400. Источник питания 1404 может быть выполнен с возможностью подачи электропитания на приводной двигатель 1402 для приведения в перемещение приводного элемента, например, приводного элемента 158. В некоторых аспектах источник питания 1404 может содержать любой удобный источник питания, например батарею, розетку переменного тока, генератор и т. п. Управляющая система 1400 может содержать различные модули или схемы и может функционально управлять различными компонентами системы, например, приводным элементом 158, источником питания 1404 или пользовательским интерфейсом. Управляющая система 1400 может быть выполнена с возможностью управления, отслеживания или измерения, например, различных операций, сигналов, входов, выходов или параметров инструмента 10.
В различных формах управляющая система 1400 может быть аналогична управляющей системе 800, описанной выше. Например, в различных аспектах управляющая система 1400 может быть выполнена с возможностью «электрической генерации» множества управляющих перемещений. Термин «электрическая генерация» означает применение электрических сигналов для активации или осуществления иного управления двигателем 1402, например, двигателями 402, 530, 560 и 610, или другим питаемым электроэнергией устройством, и его можно отличать от управляющих перемещений, создаваемых вручную или иным механическим способом, без применения электрического тока. Например, управляющая система 1400 может электрически генерировать управляющее перемещение, такое как поворотное управляющее перемещение, подавая электропитание на приводной двигатель, что может происходить как реакция на команду пользователя, такую как электрический сигнал, подаваемый на управляющую систему путем активации исполнительного механизма, например, нажимом на приводной или пусковой крючок, связанный с узлом 20 рукоятки. В некоторых аспектах управляющая система 1400 может электрически генерировать поворотное управляющее перемещение, прекращая подачу электропитания на приводной двигатель 1402, что может происходить в результате возврата исполнительного механизма или пускового крючка в открытое положение пользователем или смещающим механизмом. По меньшей мере в одном аспекте управляющая система 1400 может электрически генерировать поворотное управляющее перемещение, прекращая или уменьшая подачу электропитания на приводной двигатель 1402 при достижении измеренным электрическим параметром заданного значения. Например, управляющая система 1400 может прекратить подачу электропитания на приводной двигатель 1402, когда измеренный ток достигнет заданного порогового значения.
Как показано главным образом на ФИГ. 1 и ФИГ. 94 и 95, в различных формах хирургический инструмент 10 содержит узел 20 рукоятки, оснащенный пользовательским интерфейсом, выполненным с возможностью передачи активирующего сигнала от пользователя, например врача, к управляющей системе 1400 с целью электрической генерации управляющего перемещения, по отношению к узлу 30 удлиненного ствола, концевому эффектору 102 или приводному элементу 158. Например, в некоторых аспектах пользовательский интерфейс содержит узел спускового механизма, содержащий исполнительный механизм или спусковой механизм, обеспечивающий подачу входного сигнала на управляющую систему 1400 с целью управления подачей питания на приводной двигатель 1402, например, пусковой двигатель 530 (см. ФИГ. 23). Узел может содержать закрывающий спусковой механизм для закрывания и/или блокирования узла 190 упора и пусковой крючок для активации концевого эффектора 102, например, приведения в перемещение приводного элемента 158 с осуществлением такта выталкивания. В процессе работы закрывающий спусковой механизм можно активировать первым, таким образом приводя узел 190 упора в закрытое положение, например, захватывая ткань между кассетой 130 со скобками и узлом 190 упора. Когда врач удовлетворен положением концевого эффектора 102, врач может отодвинуть закрывающий спусковой механизм в его полностью закрытое положение блокировки. Пусковой крючок далее можно перевести из открытого положения в закрытое положение, активируя приводной элемент 158 в ходе такта выталкивания. В различных аспектах пусковой крючок может возвращаться в открытое положение, когда врач прекратит давление, или может механически возвращаться в открытое положение посредством функциональной связи с активацией приводного элемента 158 или посредством отдельного механизма. В одном аспекте пусковой крючок может представлять собой многопозиционный крючок, причем как только приводной элемент 158 достигает положения конца такта или находится близко к нему, пусковой крючок можно перевести из второго открытого положения во второе закрытое положение, что приводит к перемещению приводного элемента 158 проксимально к исходному положению. В некоторых таких аспектах первое и второе открытое и закрытое положения могут быть по существу одинаковыми. В зависимости от требуемой конфигурации в некоторых аспектах кнопка высвобождения или фиксатор могут быть выполнены с возможностью высвобождения закрывающего спускового механизма из положения блокировки. Как разъясняется ниже более подробно, после перевода пускового крючка из открытого положения в закрытое положение пусковой крючок может функционально отключаться, например, активация пускового крючка может создавать первичный активирующий входной сигнал, который может направляться в управляющую систему 1400, заставляя управляющую систему 1400 запускать активацию приводного элемента 158. В некоторых конфигурациях при отсутствии функции переопределения пользователем активация приводного элемента 158 закончится в конце такта или вблизи от него в результате действия управляющей системы, например, отцепления или прерывания подачи электропитания к приводному двигателю, даже если пусковой крючок находится в закрытом положении.
В одной форме узел спускового механизма содержит управляющий джойстик, который может быть аналогичен описанному выше управляющему джойстику 840. Например, как показано на ФИГ. 33-39, управляющий джойстик может обеспечить пользователю полезную возможность осуществлять максимальный оперативный контроль различных аспектов хирургического инструмента 10 при помощи единого интерфейса. В одном аспекте управляющий ствол 842 джойстика может быть функционально связан с джойстиковым узлом 850 переключателей, который установлен с возможностью перемещения внутри узла 844 корпуса переключателей таким образом, что узел 844 корпуса переключателей устанавливается внутри пистолетной рукоятки 26 узла 20 рукоятки. Узел 844 корпуса переключателей может содержать смещающий элемент 856, который смещает джойстиковый узел 850 переключателей и управляющий ствол 842 джойстика в нужное положение, если его положение не определяет внешняя сила, например, пользователь. Управляющий джойстик 840 может быть электрически соединен с управляющей системой 1400 с целью передачи управляющих команд управляющей системе 1400. Например, манипуляция управляющим стволом 842 джойстика, такая как нажатие или перемещение в разных направлениях, может позволять пользователю контролировать различные управляющие перемещения, связанные с хирургическим инструментом 10, которые могут включать активацию приводного элемента 158.
Как описано выше, различные формы хирургического инструмента 10 содержат один или более управляемых двигателей или двигателей с электропитанием, например, двигателей 402, 530, 560 и 610. Один или более двигателей могут находиться, например, в части узла 20 рукоятки или узла 30 удлиненного ствола инструмента 10 и могут функционировать, перемещая приводной элемент 158 между исходным положением и положением конца такта. В одной форме двигатель может включать бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель. В некоторых конструкциях двигатель может работать в режиме поворотной или линейной активации, например, линейным исполнительным механизмом, и может включать передаточное соединение между приводным двигателем 1402 и приводным элементом 158 для преобразования поворотного перемещения приводного двигателя 1402 в линейное перемещение или для сопряжения поворотного перемещения между множеством компонентов. В различных формах передаточное соединение, содержащее одну или более шестерен или сцепленных дуг с другом элементов, таких как ремни или ролики, служит для функциональной передачи поворотного перемещения от приводного двигателя 1400 к одному или более сегментам узла 30 удлиненного ствола с целью активации концевого эффектора 102. Например, поворот приводного винта 180 концевого эффектора в первом направлении заставляет приводной элемент 158 перемещаться в первом направлении, например, в дистальном направлении вдоль оси ствола A-A. В различных аспектах поворот приводного винта 180 концевого эффектора во втором направлении, противоположном первому, заставляет приводной элемент 158 перемещаться во втором направлении, например, в проксимальном направлении вдоль оси ствола A-A. В одном аспекте приводной двигатель 1400 двигает приводной ствол 158 дистально к положению конца такта и может обращать свое вращение и двигать приводной элемент 158 проксимально к исходному положению. Например, приводной двигатель 1402 может обращать свое вращение, например, при изменении полярности приложенного напряжения, таким образом происходит вращение или перемещение двигателя в противоположном направлении и, следовательно, обратное перемещение приводного элемента 158. Таким образом, приводной элемент 158 можно перемещать между положениями такта выталкивания как в проксимальном, так и в дистальном направлении общепринятыми способами, или такими способами, как изложенные в заявке на патент США, сер. № 12/235 782, которая полностью включена в настоящий документ путем ссылки. Следует отметить, что хотя инструменты 10, описанные в настоящем документе, по существу относятся к портативным инструментам, содержащим рукоятку, в различных формах инструменты 10, содержащие механические упоры, которые могут функционировать как часть электромеханических упоров, можно адаптировать для применения с роботизированными или аналогичными устройствами, применяемыми роботизированными системами.
В некоторых аспектах хирургический инструмент 10 содержит реверсивный двигатель и включает проксимальный механический упор и дистальный механический упор. В различных аспектах, как описано выше, активация пускового крючка дает сигнал активации пускового элемента 158 по такту выталкивания. Когда приводной элемент 158 достигает конца такта выталкивания, например, когда режущий элемент 160 достигает дистального конца своего режущего такта, переключатель конца такта или переключатель направления, например, может переводиться в закрытое положение, обращая полярность напряжения, подаваемого на двигатель 1402 и таким образом обращая направление поворота двигателя 1402. Такой переключатель может быть связан с управляющей системой 1400 и может использоваться в качестве дополнения или альтернативы прекращению подачи электропитания на приводной двигатель 1402. Однако следует отметить, что в других аспектах может быть предусмотрен ручной переключатель возврата для изменения направления поворота двигателя 1402 и возврата приводного элемента 158 в свое первоначальное или исходное положение.
Механический упор располагается в конце такта или вблизи от него и выполнен с возможностью увеличения сопротивления перемещению приводного элемента 158 через положение конца такта. Механический упор включает мягкий упор, содержащий пару амортизаторов 174, каждый из которых функционально соединен с гасящим элементом 175. Амортизаторы 174 выполнены с возможностью вхождения в контакт с приводным элементом 158 в конце такта или вблизи от него. Например, амортизаторы 174, показанные на ФИГ. 94, выполнены с возможностью вхождения в контакт с контактной поверхностью 173 по меньшей мере одного клина 172. В различных аспектах амортизаторы 174 могут иметь размер, дополняющий размер контактной поверхности 173. Например, по меньшей мере в одном аспекте амортизаторы 174 могут иметь такой размер, чтобы образовывать наклонную поверхность, по существу эквивалентную контактной поверхности 173. Таким образом, устойчивость контакта между амортизаторами 174 и клиньями 172 может увеличиться, и усилие, приложенное к контактной поверхности 173, может распределиться по большей структурной площади клиньев 174. Аналогично в одном аспекте амортизаторы 174 содержат гибкую, например, эластичную или смягчающую поверхность для приема контактной поверхности 173 и уменьшения повреждения компонентов. В одной форме каждый из гасящих элементов 175 содержит пружину 176, расположенную между амортизатором 174 и твердым упором 178 с целью создания сопротивления и замедления приводного элемента 158 в конце такта или вблизи от него.
Следует понимать, что различные аспекты хирургических инструментов 10 могут быть оснащены множеством амортизаторов 174 и гасящих элементов 175 и что амортизаторы 174 и гасящие элементы 175 могут быть выполнены с возможностью контакта с другими частями приводного элемента 158. Например, инструмент 10 может содержать дополнительный упор, используемый в качестве дополнения или замены указанных выше конструкций твердого упора 178 и/или мягкого упора. Таким образом, в одной форме, как показано на ФИГ. 94, приводной винт 180 может быть оснащен упором, который может включать мягкий упор, содержащий амортизатор 290, связанный с гасящим элементом 291, расположенным по такту выталкивания, лежащим напротив контактной поверхности 292 приводного элемента 158. В одной форме гасящий элемент 291 содержит эластомерный материал, который может сжиматься между амортизатором 292 и твердым упором 294, поглощая продольно направленную силу приводного элемента 158. В некоторых аспектах множество мягких упоров могут быть выполнены с возможностью контакта с приводным элементом 158 в различных заданных местах. Например, в одной форме приводной элемент 158 входит в контакт с амортизатором 290 прежде контакта с амортизатором 174, например, чтобы получить лучше идентифицируемый пик тока, например, чтобы получить выброс тока, содержащий два отдельных пиковых компонента, амплитуду и/или временной интервал между которыми можно применять для уверенности в появлении выброса тока.
В различных формах гасящие элементы 175 содержат сжимаемую часть, которая может быть или не быть связанной с твердым упором 178. Например, в одном аспекте гасящий элемент 175 может находиться между твердым упором 178 и амортизатором 174 и может включать сжимаемую часть, например, пружину 176 или эластомерный материал, такой как полимер, пеноматериал или гель. В процессе работы амортизатор 174 может ускоренно приблизиться к сжимаемой части после контакта с приводным элементом 158, в результате чего сжимаемая часть сожмется в заданной степени. В различных аспектах гасящий элемент 175 может содержать замедляющую часть, такую как тормоз. В одном аспекте замедляющая часть содержит сжимаемую камеру, например, гидравлическую пневматическую камеру, посредством которой контакт с приводным элементом 158 может приводить к сжатию поршня, расположенного внутри камеры, в результате чего увеличивается давление, которое должно замедлять или тормозить приводной элемент 158. В некоторых аспектах мягкий упор может быть сконструирован с возможностью оказания сопротивления и/или замедления, плавно или постепенно изменяющегося по отношению ко времени и/или расстоянию. Например, одна или более спиральных пружин, имеющих одинаковые или разные параметры сжатия, могут быть выполнены или расположены с возможностью точного контроля замедления или торможения замедляемого элемента, например, плавным или ступенчатым образом. В одной форме мягкий упор может быть выполнен с возможностью оказания нарастающего сопротивления дистальному перемещению приводного элемента 158.
В различных формах мягкий упор содержит смещающий элемент, выполненный с возможностью смещения контактного элемента от твердого упора. Следует понимать, что в некоторых аспектах смещающий элемент может повторять или может иметь аналогичные компоненты с гасящими элементами 175. Таким образом, в некоторых формах смещающий элемент может быть выполнен с возможностью сжатия между амортизатором 174 и твердым упором 178 под действием силы продольного перемещения приводного элемента 158 и последующего возврата в состояние перед сжатием при прекращении действия силы. В некоторых аспектах смещающий элемент может быть выполнен с возможностью активации, перемещения и/или сжатия для противодействия пусковому перемещению приводного элемента 158. Следует отметить, что сжатие или иное противодействие смещению, связанное с гасящими элементами 175, может приводить к передаче энергии, которую может по меньшей мере временно запасать или удерживать мягкий упор, находящийся в положении, обладающем потенциальной энергией. В одном аспекте гасящие элементы 175 могут удерживаться в положении, обладающем потенциальной энергией, например посредством фиксатора, крючка или блокиратора, который может не давать одному или более гасящим элементам 175 вернуться в состояние, которое они имели до сжатия. Преимуществом является то, что сохраненную энергию может высвободить, например, пользователь и/или управляющая система 1400, в результате чего по меньшей мере часть сохраненной энергии будет приложена для возврата приводного элемента 158 в исходное положение.
В различных аспектах гасящие элементы 175 могут содержать дополнительные конфигурации. Например, в одном аспекте один или более магнитов, таких как постоянные магниты, могут располагаться таким образом, чтобы отталкивать противолежащий постоянный магнит, связанный с приводным элементом 158. Например, один или более магнитов могут быть выполнены с возможностью поворота или перемещения с целью регулировки величин отталкивающих магнитных полей, противодействующих продольному перемещению. В различных других аспектах могут применяться катушечные магниты, электрически соединенные с управляющей системой для активации перед или после успешного замедления приводного элемента 158. Дополнительные гасящие элементы 175 могут содержать структуры, совершающие возвратно-поступательные перемещения, включая конструкции с использованием, например, роликов и/или шестерен.
В различных аспектах механический упор, содержащий мягкий упор, может быть связан или не связан с твердым упором 178. Например, в некоторых формах мягкий упор включает твердый упор 178, тогда как в других формах мягкий упор не включает твердый упор, или твердый упор 178 может играть роль вспомогательного упора. В некоторых формах мягкий упор может содержать подпружиненный твердый упор 178 для обеспечения постепенного и/или нарастающего сопротивления такту выталкивания или замедления приводного элемента 158. Например, мягкий упор может быть выполнен с возможностью постепенного снижения скорости приводного элемента 158 путем оказания сопротивления проксимально или дистально направленной силе, приложенной к приводному элементу 158 приводным двигателем 1402, или выраженной в инерции системы. По меньшей мере в одной форме величина сопротивления, оказываемого мягким упором для противодействия или замедления пускового или приводного движения, может избирательно настраиваться. Например, инструмент 10 может быть оснащен одним или более мягкими упорами, которые можно избирательно смещать или поворачивать во множество положений по такту выталкивания. Таким образом, пользователь может настраивать положение мягкого упора для конкретной области применения. В одной форме электрохирургическое устройство, содержащее мягкий упор, может включать регулировочный диск для настройки сопротивления, создаваемого мягким упором, в конце такта выталкивания. В некоторых таких формах изменение регулировки диска может одновременно устанавливать продольное расстояние, охваченное мягким упором, и, следовательно, положение конца такта, а также пороговые значения, связанные с определением выброса тока, как описано ниже более подробно. В одной форме для пользователя может выводиться предупреждающий сигнал при ручной установке параметра за пределами заданного механического допуска.
Снова обращаясь к ФИГ. 95, в различных формах управляющая система 1400 выполнена с возможностью формирования и/или реагирования на информацию обратной связи, которая может по меньшей мере частично получаться на основе измерений, проведенных управляющей системой 1400, или полученных от других компонентов системы. Например, в одном аспекте управляющая система 1400 может быть выполнена с возможностью запуска подачи электропитания на компоненты системы в результате входного сигнала, такого как команда пользователя. В некоторых аспектах управляющая система 1400 может генерировать или предоставлять для пользователя информацию, такую как предупреждение или сведения о состоянии инструмента, посредством пользовательского интерфейса, такого как визуальное или звуковое отображение. Сигналы или входы, генерируемые управляющей системой 1400, могут, например, быть ответом на другие сигналы или входы от пользователя, компонентов инструмента, либо они могут зависеть от одного или более измерений, связанных с инструментом 10. В некоторых аспектах управляющая система 1400 может быть выполнена с возможностью отслеживания или приема различных измеренных значений и последующей интерпретации, вычисления и/или декодирования информации и реагирования заданным образом.
В одном аспекте управляющая система 1400 включает или может быть избирательно связана с полупроводниковым элементом, компьютерной микросхемой или памятью. Как отмечалось выше, входные сигналы, идущие к управляющей системе 1400 или от нее, например, сигналы, поступающие от пользователя или генерируемые управляющей системой 1400 в результате команд, сигналов или измеренных параметров, могут быть аналоговыми или цифровыми. Соответственно, в некоторых формах управляющая система 1400 может быть выполнена с возможностью отправки или приема аналоговых или цифровых входов или сигналов, идущих к компонентам инструмента или от них. В различных аспектах управляющая система 1400 может применять программное обеспечение, которое может использовать один или более алгоритмов для дальнейшего формирования входных сигналов, предназначенных для управления и отслеживания компонентов системы. Такие сформированные входные сигналы могут зависеть от критериев, измеренных и/или рассчитанных управляющей системой 1400 или, в некоторых случаях, предоставленных управляющей системе 1400 другим компонентом инструмента, пользователем или отдельной системой, находящейся в функциональной связи с управляющей системой 1400. Например, управляющая система 1400 может реагировать путем активации или деактивации приводного двигателя 1402, прекращения или запуска подачи энергии на приводной двигатель 1402 или другие компоненты системы, или путем направления команд или дополнительных входных сигналов для этих или других операций. В различных аспектах управляющая система 1400 может содержать схему, например транзисторы или переключатели, выполненную с возможностью отслеживания электрических параметров, связанных с работой инструмента 10. Например, схема управляющей системы может быть выполнена с возможностью активации и деактивации приводного двигателя 1402 или размыкания и замыкания цепи подачи электропитания на приводной двигатель 1402, когда достигают порогового значения электрические параметры, связанные с работой инструмента 10, например, выброс тока, что определяется конфигурацией схемы.
В некоторых формах хирургические инструменты 10 и системы, использующие механический упор, могут работать без обратной связи. Например, в одной форме инструменты могут работать без помощи устройства обратной связи по положению, выполненного с возможностью предоставления управляющей системе 1400 информации, касающейся того, как инструмент 10 реагирует на входные сигналы, так чтобы управляющая система 1400 могла модифицировать выходные сигналы. В различных аспектах, как указано выше, управляющая система 1400 может отслеживать подачу электропитания на приводной двигатель 1402 для определения положения конца такта приводного элемента 158. Таким образом, например, управляющая система 1400 при помощи различных методик отслеживания напряжения, по которым можно определять ток, а именно - выбросы тока, может по меньшей мере частично определить механический упор. Например, управляющая система 1400 может отслеживать напряжение с целью определения использования тока по отношению к приводному двигателю 1402 и, следовательно, к приводному элементу 158, как описано выше. Сопротивление при такте выталкивания увеличивает вращающий момент на приводном двигателе 1402, что приводит к обнаруживаемым выбросам тока по отношению к подаче электропитания на приводной двигатель 1402. Таким образом, большой выброс тока может быть измерен управляющей системой 1400, когда приводной элемент 158 будет контактировать с механическим упором, и в этот момент управляющая система 1400 может отреагировать прекращением подачи электропитания на приводной двигатель 1402. Следовательно, механический упор создает физическое усилие, замедляющее приводной элемент 158, и создает выброс тока, который управляющая система 1400 может определить и запустить расцепление приводного двигателя 1400.
Как отмечалось выше, в некоторых аспектах управляющая система 1400 выполнена с возможностью управления различными операциями инструмента 10. Например, в некоторых аспектах управляющая система 1400 содержит управляющую схему 1406, функционально соединенную с электросхемой 1408 привода. Электросхема 1408 привода может быть выполнена с возможностью подачи электропитания от источника питания 1404 к приводному двигателю 1402 для приведения в движение приводного элемента 158. Управляющая схема 1406 может быть выполнена с возможностью управления подачей электропитания на электросхему 1408 привода. Следовательно, управляющая схема 1406 может быть выполнена с возможностью управления приводным двигателем 1402 путем управления подачей электропитания на электросхему 1408 привода. Управляющая схема 1406 также может быть выполнена с возможностью отслеживания, например, определения или измерения, электропитания, подаваемого на приводной двигатель 1402. Например, управляющая схема 1406 может определять входное/выходное напряжение и/или ток в одной или более точках электросхемы 1408 привода, через которую приводной двигатель 1402 получает питание для активации приводного элемента 158. В различных аспектах управляющая схема 1406 может включать или соединяться с электросхемой 1408 привода, в которой она может отслеживать входное/выходное напряжение, например, на резисторе, соединенном с токовым контуром, связанным с электросхемой 1408 привода. Специалистам в данной области будет понятно, что приведенное выше описание является лишь одним способом измерения и/или отслеживания тока, подаваемого на приводной двигатель 1402, и также будет понятно, что ток можно аналогично измерять и/или отслеживать альтернативными способами, известными специалистам и, следовательно, такие способы относятся к области настоящего изобретения. В некоторых формах, когда управляющая схема 1406 обнаруживает выброс тока, подаваемого на приводной двигатель 1402, управляющая система 1400 прекращает подачу энергии на приводной двигатель 1402 через электросхему 1408 привода. В различных аспектах управляющая схема 1400 также может расцепить функциональное соединение, например, трансмиссию, между приводным двигателем 1402 и приводным элементом 158, по меньшей мере кратковременно, в результате измеренного выброса тока.
В некоторых конфигурациях, если электромеханический упор содержит твердый упор, выполненный с возможностью резкого прекращения такта выталкивания, то инструмент 10 может быть подвержен механической поломке, например, из-за временной задержки между обнаружением выброса тока и последующим снятием приводной силы, обеспечиваемой приводным двигателем 1402. Кроме того, например, вследствие инерции системы, приводной элемент 158 также может продолжить перемещение после достижения конца такта, несмотря на прекращение подачи электропитания на приводной двигатель 1402. В некоторых случаях задержка со снятием приводной силы с приводного элемента 158 может приводить к механической поломке приводного элемента 158, приводного двигателя 1402, приводного винта 180 или другого передаточного соединения.
На ФИГ. 96 представлено графическое изображение зависимости тока от времени в инструменте 10, использующем электромеханический упор, содержащий твердый упор 178 без мягкого упора. Ток между моментом A, соответствующим положению приводного элемента 158 проксимально от конца такта, и моментом B, соответствующим положению приводного элемента 158 при контакте с твердым упором 178 в конце такта, является относительно низким или постоянным. Однако в момент времени B ток образует выбросы, представляющие контакт между пусковым элементом 158 и твердым упором, расположенным в конце такта. Из-за временной задержки между обнаружением выброса тока в некоторый момент после момента В и прекращением подачи электропитания на приводной двигатель 1402 приводной двигатель 1402 продолжает придвигать приводной элемент 158, хотя и безуспешно, к твердому упору 178 до момента времени C, когда подача электропитания на приводной элемент 158 прекращается. Хотя это и не показано, инерция системы также может продолжать придвигать приводной элемент 158 к твердому упору 178 в течение какого-то времени после момента C.
Как отмечалось выше, несмотря на удобство работы без обратной связи, хирургические инструменты, функционирующие как показано на ФИГ. 76, могут быть подвержены механическим поломкам, например, из-за задержки между обнаружением выброса тока и последующим прекращением приводного перемещения. В соответствии с различными формами, как показано на ФИГ. 97 и 98, описанные в настоящем документе инструменты 10 могут содержать электромеханические упоры, содержащие структуру мягкого упора для вхождения в контакт и замедления приводного элемента 158 перед достижением конца такта с целью образования измеримого выброса тока, таким образом увеличивая время, имеющееся у управляющей системы 1400, для обнаружения и реакции на выброс тока. Хирургический инструмент 10 включает различные элементы, аналогичные показанным на ФИГ. 1 и 70; следовательно, аналогичные элементы обозначены аналогичными идентификационными номерами и для краткости не будут описываться повторно. Инструмент 10 включает электромеханический упор, содержащий мягкий упор для противодействия перемещению приводного элемента 158 в конце или вблизи от конца такта выталкивания или его отрезка, например, у проксимального исходного положения или на дистальном конце такта при прохождении между первым положением мягкого упора S1 и вторым положением мягкого упора S2 вдоль оси ствола A-A. Электромеханический упор дополнительно содержит твердый упор 178, находящийся в положении H. Мягкий упор содержит амортизатор 174 и гасящий элемент 175, расположенный у конца такта или вблизи от него, например, по меньшей мере частично в пределах между первым положением мягкого упора S1 и вторым положением мягкого упора S2. Амортизатор 174 и гасящий элемент 175 обеспечивают создание сопротивления приводному элементу 158 в области конца такта в пределах между первым положением мягкого упора S1 и вторым положением мягкого упора S2. В различных формах амортизатор 174 и гасящий элемент 175 также могут замедлять приводной элемент 158 от первого положения мягкого упора S1 до второго положения мягкого упора S2. В некоторых формах мягкий упор может располагаться в любом предпочтительном месте, где желательно создать сопротивление или начать замедлять приводной элемент 158.
На ФИГ. 97 представлен приводной элемент 158 в процессе направления по такту выталкивания в положении проксимально от первого положения мягкого упора S1. На ФИГ. 98 показан приводной элемент 158 после полного направления по такту выталкивания за пределы первого положения мягкого упора S1 в конце такта так, чтобы он находится во втором положении мягкого упора S2 в конце такта. Соответственно, мягкий упор расположен так, что контактирует с приводным элементом 158 в первом положении мягкого упора S1, затем сжимается дистально ко второму положению мягкого упора S2 вследствие сжимающего взаимодействия с твердым упором, находящимся в положении H. Соответственно, второе положение мягкого упора S2 может по существу представлять собой положение твердого упора H* по отношению к приводному элементу и дистальному пределу конца такта. В различных аспектах приводной элемент 158 может полностью или существенно замедлиться до достижения им положения твердого упора H* во втором положении мягкого упора S2. Следовательно, в таких аспектах твердый упор, если он имеется, может представлять собой резервный или предохранительный элемент.
Сопротивление приводному перемещению, создаваемое механическим упором, которое может сопровождаться замедляющей или тормозящей силой, может быть, например, плавным, нарастающим или ступенчатым по отношению к расстоянию и/или времени. Таким образом, в некоторых аспектах мягкий упор формирует участок увеличенного сопротивления между первым положением мягкого упора S1 и вторым положением мягкого упора S2. Следует отметить, что конец такта не обязательно предполагает, что функциональная работа приводного элемента продолжается на всем протяжении до конца такта, например, до второго положения мягкого упора S2. Например, в одной форме конец такта располагается в положении самой дистальной скобы или вблизи от него. В другой форме положение первичного контакта с мягким упором, например, в первом положении мягкого упора S1, находится дистально от самой дистальной скобы. Таким образом, приводной элемент 158 может не контактировать и не испытывать существенного сопротивления своему продольному перемещению по такту выталкивания до тех пор, пока не будет вытолкнута самая дистальная скоба, и в это время может начаться увеличение сопротивления и/или замедление. Таким образом, перемещение приводного элемента не будет преждевременно ограничено действием управляющей системы 1400.
На ФИГ. 75 представлено графическое изображение зависимости тока от времени в инструменте 10, использующем электромеханический упор, содержащий мягкий упор, в соответствии с различными аспектами. Ток между моментом A*, соответствующим положению приводного элемента 158 проксимально от конца такта, и моментом B*0, соответствующим положению приводного элемента 158 при контакте с мягким упором, например, у амортизатора 174, является относительно низким или постоянным. Однако после момента B*0 ток постепенно начинает нарастать, представляя увеличение сопротивления продольному перемещению приводного элемента. В различных аспектах постепенное нарастание сопротивления может иметь благоприятный эффект увеличения времени выброса тока, например между моментами B*0 и B*2, существенно увеличивая необходимое для ответа время и давая управляющей системе 1400 время на реакцию, тем самым уменьшая неблагоприятные эффекты временной задержки, описанные выше по отношению к ФИГ. 96. В некоторых аспектах управляющая система 1400 может отслеживать напряжение и измерять ток, подаваемый на приводной двигатель 1402, как описано выше. Управляющая система 1400 может быть выполнена с возможностью реагирования заданным способом на изменение тока. Например, при достижении порогового тока, например, в момент времени B*1, управляющая система 1400 может прекратить подачу электропитания на приводной двигатель 1402. В одной конфигурации пороговый ток может содержать временной компонент. Например, пороговый ток может включать разницу между токами за определенный период времени. В некоторых конфигурациях выброс тока может содержать один из множества заданных порогов тока, каждый из которых определяется отношением разницы токов к временному периоду. Как можно видеть на ФИГ. 99, постепенное увеличение сопротивления также может иметь преимущественный эффект снижения ударного воздействия на концевой эффектор 102 при контакте с твердым упором в момент времени B*2, а также уменьшения временного периода от B*2 до C*, в течение которого приводной двигатель 1402 продолжает активировать приводной элемент 158 к твердому упору 178 после остановки дистального перемещения.
В некоторых аспектах управляющая система 1400 может определить, что был достигнут заданный порог тока, измеряемый, например, по возрастанию тока или наклону кривой зависимости тока от времени, и затем прекратить подачу входного сигнала электропитания на приводной двигатель 1402. Например, в одной конфигурации управляющая система 1400 может отслеживать ток и таким образом прекращать подачу питания на приводной двигатель 1402, когда амплитуда тока превышает заданное значение в течение заданного периода времени. В различных аспектах эти или другие значения, такие как пороговые значения, могут регулироваться пользователем, например, вручную или обращением ко встроенному протоколу посредством административного соединения, например, через компьютер. По меньшей мере в одной конфигурации электросхема 1408 привода или управляющая схема 1406 содержит переменный резистор, чтобы пользователь мог изменять подачу тока на приводной двигатель 1402 путем изменения степени активации по отношению к спусковому механизму. Например, поворот пускового двигателя 530 может быть пропорционален давлению или перемещению, которое пользователь прикладывает к исполнительному механизму или спусковому механизму. В одной форме управляющая схема 1406 может быть связана с электросхемой 1408 привода таким образом, чтобы пороговые значения можно было повышать или ослаблять чувствительность к ним.
В некоторых конфигурациях в концевом эффекторе 102 может использоваться множество датчиков или электрических компонентов для обеспечения различных форм обратной связи с пользователем. В одном аспекте датчики могут обеспечивать обратную связь с управляющей системой 1400 и автоматически управлять различными двигателями, связанными с инструментом. Например, в одном аспекте хирургический инструмент содержит множество двигателей, таких как двигатели 402, 530, 560 и/или 610, которые могут быть активированы одной или более управляющими системами, такими как управляющие системы 800 и 1400, для электрической генерации управляющих перемещений. Управляющие системы могут быть выполнены с возможностью функционального управления двигателями и приема положительной обратной связи от множества датчиков, выполненных с возможностью отслеживания информации о положении. В некоторых аспектах управляющие системы могут применять информацию о положении для электрической генерации измененных или модулированных управляющих перемещений посредством управления подачей электропитания на один или более двигателей или, например, могут сообщать различную информацию о положении пользователю. В различных аспектах управляющие системы могут функционировать в гибридной системе без/с обратной связью. Например, управляющая система 1400 может быть выполнена с возможностью управления приводным двигателем 1402, например, пусковым двигателем 530 в системе без обратной связи, как описано в настоящем документе, при управлении различными другими двигателями, например, двигателем 610 поворота ствола в системе с обратной связью. В одном аспекте управляющая система 1400 может быть выполнена таким образом, чтобы пользователь мог избирательно выбирать, какими двигателями управляющая система 1400 может управлять в системе с обратной связью, а какими - в системе без обратной связи, например, для настройки различных операций инструмента 10 по желанию.
Следует понимать, что пользователь может подавать один или более входных сигналов, которые могут подвергаться или не подвергаться оценке управляющей системой 1400. Например, управляющая система 1400 может включать режим переопределения, в котором один или более входных сигналов, поданных на управляющую систему 1400 одним или более пользователями или другими управляющими системами, связанными с управляющей системой 1400, могут перенаправляться и/или подаваться на инструмент 10. Например, когда приводной элемент 158 находится в исходном положении, управляющая система 1400 может блокировать, задерживать или игнорировать команды, задающие подачу электропитания на приводной двигатель 1402 или иначе действующие на приводной двигатель 1402 для электрической генерации пускового перемещения приводного элемента 158. По меньшей мере в одном аспекте блокировка происходит или является основным состоянием/положением системы до тех пор, пока не произойдут одно или более событий, таких как закрытие упора 190 или получение адекватной механической или электрической обратной связи, например, такой как информация о фиксации компонентов, переопределенной пользователем команде, изменении измеренного параметра на/вблизи/вдоль траектории приводного элемента.
В различных аспектах один или более механических упоров, включая узлы мягких упоров в соответствии с настоящим описанием, могут быть предоставлены в наборе. Набор может иметь специальную область применения в одном или более из выбранных устройств или может модифицироваться для универсального применения во многих устройствах. Например, набор узла мягкого упора может содержать сменный замедляющий элемент, такой как гасящие элементы и/или контактные элементы, такие как амортизаторы. В одной форме набор включает сменные или запасные втулки, которые можно применять как вставки внутрь корпуса, размер которых позволяет поддерживать гасящий элемент с целью увеличения сопротивления, оказываемого мягким упором, в одном или более местах по такту выталкивания. В различных формах могут быть обеспечены прокладки для регулирования просвета между упором и кожухом устройства. В некоторых аспектах контактный элемент может включать постоянный или временный ограничитель, такой как сменный, модифицируемый или обновляемый контактный ограничитель, выполненный с возможностью размещения между приводным элементом и амортизатором, гасящим элементом и/или твердым упором. Контактный ограничитель может быть образован из эластичного или иного материала, по меньшей мере частично сжимаемого при контакте с ускоренной массой приводного элемента или при ударе о мягкий или твердый упор. В одном аспекте ограничитель может являться полимером, который может быть надет, натянут, вставлен или наплавлен на часть, такую как контактная поверхность приводного элемента 158. В другом аспекте ограничитель может быть установлен или пригоден для установки на лицевую поверхность амортизатора 174. В других аспектах амортизатор 174 может содержать контакт, выполненный с возможностью контакта и по меньшей мере частичного поглощения усилия от ускоренной массы приводного элемента 158 для предотвращения или частичного ограничения степени физического повреждения или механической поломки приводного элемента 158, приводного двигателя 1402, приводного винта 180 или связанных с ними компонентов.
В некоторых формах извлечение хирургического инструмента, такого как хирургический инструмент 10, показанный на ФИГ. 1 и 2, из тела пациента может быть затруднено, поскольку концевой эффектор 102 может находиться в повернутом шарнирно или по оси положении, что не дает концевому эффектору 102 пройти через троакар или иную точку доступа в тело пациента. Врач может не знать о том, как в текущий момент шарнирно повернут концевой эффектор 102, как например, вдоль оси шарнира B-B, и может попытаться извлечь хирургический инструмент 10, не выпрямив сначала концевой эффектор 102. В различных формах хирургический инструмент может быть выполнен таким образом, чтобы его концевой эффектор выпрямлялся на основании входного сигнала датчика (например, инструмент может иметь концевой эффектор, выпрямляемый с помощью датчика). Таким образом, врач перед извлечением концевого эффектора 102 из тела пациента, например, через троакар, может быть уверен, что концевой эффектор 102 выпрямлен по отношению к оси шарнира B-B. В различных формах датчик может быть выполнен с возможностью запускать событие приводного выпрямления при извлечении концевого эффектора из тела пациента.
На ФИГ. 105 представлена одна форма хирургического инструмента 5810, содержащая концевой эффектор 5802, выпрямляемый с помощью датчика. Датчик 5826a, 5826b может обнаруживать сильное проксимальное перемещение хирургического инструмента 5810. Сильное проксимальное перемещение может указывать на то, что хирургический инструмент 5810 извлекается из тела пациента, например, через троакар или внешнюю трубку. Можно установить минимальный порог проксимального перемещения для предотвращения выпрямления концевого эффектора 5802 из-за малого проксимального смещения хирургического инструмента 5810 во время лечения. В различных формах, когда сильное проксимальное перемещение хирургического инструмента 5810 превышает минимальный порог, датчик 5826a, 5826b может послать сигнал на двигатель, например, такой как двигатель 402 управления шарниром, заставляя двигатель выпрямить концевой эффектор 5802.
В некоторых формах датчик 5826a, 5826b может размещаться в стволе 5831, концевом эффекторе 5802, рукоятке 5820 или в любом другом месте, подходящем для обнаружения сильного проксимального перемещения хирургического инструмента 5810. В различных формах датчик 5826a, 5826b может представлять собой любой подходящий датчик для обнаружения перемещения хирургического инструмента 5810. Например, датчик 5826a, 5826b может представлять собой датчик, выполненный с возможностью измерения ускорения, такой как акселерометр. Когда акселерометр обнаруживает ускорение в проксимальном направлении, превышающее заданный порог, он может посылать сигнал на двигатель 402 управления шарниром для активации процесса выпрямления. В другом примере датчик 5826a, 5826b может представлять собой датчик приближения, например, магнитный датчик, датчик Холла, герконовый переключатель или любой другой подходящий датчик приближения. В различных формах датчик приближения может быть выполнен с возможностью измерения приближения датчика 5826a, 5826b к неподвижной точке, такой как троакар 5858 или внешняя трубка 5960. При извлечении хирургического инструмента 5810 в проксимальном направлении расстояние между датчиком 5826a, 5826b и неподвижной точкой может уменьшаться, в результате чего датчик 5826a, 5826b посылает сигнал на двигатель 402 управления шарниром с целью активации приводного процесса выпрямления концевого эффектора 5802. В различных формах может быть включено множество датчиков для проведения дополнительной проверки для процесса выпрямления.
В одной форме первый датчик 5826a и второй датчик 5826b могут располагаться на хирургическом инструменте 5810. Первый датчик 5826a может размещаться на проксимальной части ствола 5831, а второй датчик 5826b может находиться на дистальной части ствола 5831. Специалистам в данной области будет очевидно, что первый и второй датчики 5826a, 5826b могут размещаться в любой подходящей части хирургического инструмента 5810, например, такой как рукоятка 5820, хирургический модуль, который может быть отсоединен, ствол 5831 или выпрямляемый с помощью датчика концевой эффектор 5802. В некоторых формах первый датчик 5826a может представлять собой акселерометр, выполненный с возможностью обнаружения сильного проксимального перемещения хирургического инструмента 5810. В некоторых формах второй датчик 5826b может представлять собой датчик приближения, выполненный с возможностью обнаружения расстояния между вторым датчиком 5826b и неподвижной точкой, например, такой как троакар 5858. В представленной форме троакар 5858 содержит множество магнитов 5822. Множество магнитов 5822 может генерировать постоянное магнитное поле. Второй датчик 5826b может быть выполнен с возможностью обнаружения увеличения интенсивности магнитного поля, указывающего на перемещение второго датчика 5826b и, следовательно, концевого эффектора 5802, выпрямляемого с помощью датчика, к троакару 5858.
В одной форме первый датчик 5826a и второй датчик 5826b могут быть выполнены с возможностью активации приводного процесса выпрямления концевого эффектора 5802, выпрямляемого с помощью датчика. В процессе работы первый датчик 5826a может обнаружить сильное проксимальное перемещение хирургического инструмента 5810, обнаружив превышение заданного порога проксимального ускорения. Первый датчик 5826a может посылать первый сигнал на двигатель 402 управления шарниром для активации приводного процесса выпрямления. В некоторых формах второй датчик 5826b также может обнаружить сильное проксимальное перемещение концевого эффектора, обнаружив изменение интенсивности магнитного поля между датчиком 5826b и фиксированной точкой, такой как троакар 5858. Второй датчик 5826b может посылать второй сигнал на двигатель 402 управления шарниром для активации приводного процесса выпрямления.
Как показано на ФИГ. 105, концевой эффектор 5802, выпрямляемый с помощью датчика, был шарнирно повернут по оси шарнира B-B (показана на ФИГ. 1). Концевой эффектор 5802, выпрямляемый с помощью датчика, может быть соединен со стволом 5831. Оператор может переместить хирургический инструмент 5810 в проксимальном направлении, заставляя ствол 5831 и концевой эффектор 5802, поворачиваемый с помощью датчика, перемещаться в проксимальном направлении. Проксимальное перемещение может быть обнаружено первым датчиком 5826a. Первый датчик 5826a может представлять собой акселерометр. Первый датчик 5826a может посылать сигнал на двигатель управления шарниром, например, такой как двигатель 402 управления шарниром, для активации приводного процесса выпрямления. Проксимальное перемещение также может быть обнаружено вторым датчиком 5826b. Второй датчик 5826b может представлять собой магнитный датчик приближения, например, такой как датчик Холла или герконовый датчик. Второй датчик 5826b может посылать сигнал на двигатель 402 управления шарниром для активации приводного процесса выпрямления. Второй датчик 5826b может посылать сигнал на двигатель 402 управления шарниром независимо от первого датчика 5826a.
Когда врач извлекает хирургический инструмент 5810 из троакара 5858, приводный процесс выпрямления проводит выпрямление концевого эффектора 5802, выпрямляемого с помощью датчика. После завершения приводного процесса выпрямления концевой эффектор 5802, выпрямляемый с помощью датчика, находится в прямой конфигурации, как показано на ФИГ. 106. Концевой эффектор 5802, выпрямляемый с помощью датчика, можно извлечь через троакар 5858 без травмирования пациента или повреждения троакара 5858, а также без необходимости для врача вручную выпрямлять концевой эффектор 5802, выпрямляемый с помощью датчика. В некоторых формах хирургический инструмент 5810 может подавать сигнал обратной связи для пользователя, указывая на активацию или выполнение приводного процесса выпрямления. Например, в некоторых формах на рукоятке 5820 может размещаться светодиод. Светодиод может светиться в приводном процессе выпрямления для предоставления пользователю визуальной индикации происходящего приводного процесса выпрямления.
В некоторых формах первый и второй датчики 5826a, 5826b могут функционировать как дополнительные средства проверки процесса выпрямления. Например, в некоторых формах как первый, так и второй из датчиков 5826a, 5826b может посылать сигнал на двигатель 402 управления шарниром для активации процесса выпрямления. Сигнал от первого датчика 5826a или от второго датчика 5826b может заставить двигатель 402 управления шарниром выпрямить концевой эффектор 5802, выпрямляемый с помощью датчика. В некоторых формах приводный процесс выпрямления может не выполняться до тех пор, пока не будет принят сигнал как от первого датчика 5826a, так и от второго датчика 5826b. В некоторых формах первый датчик 5826a или второй датчик 5826b может независимо активировать приводный процесс выпрямления, но процесс может быть прерван, если в течение заданного промежутка времени не будет принят сигнал как от первого, так и от второго из датчиков 5826a, 5826b. Например, приводный процесс выпрямления может быть запущен сигналом от первого датчика 5826a. Если в течение заданного промежутка времени не будет принят сигнал от второго датчика 5826b, то приводный процесс выпрямления может быть прерван хирургическим инструментом 5810.
В некоторых формах хирургический инструмент 5810 может содержать датчик останова. Датчик останова может обнаруживать контакт между концевым эффектором 5802, выпрямляемым с помощью датчика, и срезом ткани в процессе выпрямления. Если датчик останова обнаружит контакт между концевым эффектором 5802, выпрямляемым с помощью датчика, и срезом ткани, то датчик останова может послать сигнал на двигатель 402 управления шарниром и остановить процесс выпрямления для предотвращения травмирования пациента. В некоторых формах, когда датчик останова определяет, что концевой эффектор 5802, выпрямляемый с помощью датчика, уже не контактирует с участком ткани, датчик останова может послать сигнал на двигатель 402 управления шарниром для продолжения процесса выпрямления. В некоторых формах датчик останова может послать сигнал оператору, например, через устройство обратной связи, уведомляя пользователя о том, что концевой эффектор 5802, выпрямляемый с помощью датчика, вошел в контакт с участком ткани и что процесс выпрямления остановлен. Датчик останова может представлять собой, например, датчик давления, находящийся на концевом эффекторе 5802, выпрямляемом с помощью датчика.
На ФИГ. 107 и 108 представлена одна форма концевого эффектора 5902, выпрямляемого с помощью датчика. В некоторых формах концевой эффектор 5902, выпрямляемый с помощью датчика, может быть вставлен в тело пациента через внешнюю трубку 5960. Внешняя трубка 5960 может содержать магнитное кольцо 5922, размещенное на дистальном конце внешней трубки 5960. Первый датчик 5926a и второй датчик 5926b могут быть выполнены с возможностью обнаружения перемещения концевого эффектора 5902, выпрямляемого с помощью датчика, когда ствол 5931 извлекают из внешней трубки 5960. В некоторых формах первый датчик 5926a может представлять собой акселерометр, а второй датчик 5926b может представлять собой магнитный датчик приближения. Второй датчик 5926b может обнаруживать изменение напряженности магнитного поля по мере перемещения второго датчика 5926b в проксимальном направлении к магнитному кольцу 5922. Когда второй датчик 5926b достигает магнитного кольца 5922, второй датчик 5926b может генерировать сигнал, запускающий приводный процесс выпрямления концевого эффектора 5902. Второй датчик 5926b может представлять собой любой подходящий датчик для восприятия изменений магнитного поля, например, такой как герконовый датчик или датчик Холла. Как описывалось выше, первый датчик 5926a и второй датчик 5926b могут обеспечивать дополнительную проверку приводного процесса выпрямления. Специалистам в данной области будет понятно, что в некоторых формах может включаться только первый датчик 5926a или только второй датчик 5926b. В некоторых формах могут быть включены дополнительные датчики для обнаружения сильного проксимального перемещения хирургического инструмента 5910.
На ФИГ. 109 и 110 представлена одна форма концевого эффектора 6002, выпрямляемого с помощью датчика, переходящая из шарнирно повернутого состояния в выпрямленное состояние в процессе извлечения из троакара 6058. На ФИГ. 109 концевой эффектор 6002, выпрямляемый с помощью датчика, находится в шарнирно повернутом положении по отношению к стволу 6031. Врач может начать извлекать концевой эффектор 6002, выпрямляемый с помощью датчика, через троакар 6058 в проксимальном направлении, обозначенном стрелкой A. Проксимальное перемещение может обнаруживаться первым датчиком 6026a, вторым датчиком 6026b или как первым, так и вторым датчиками 6026a, 6026b. Первый датчик 6026a может представлять собой акселерометр, выполненный с возможностью обнаружения сильного проксимального перемещения ствола 6031. Второй датчик 6026b может представлять собой магнитный датчик, выполненный с возможностью обнаружения изменения магнитного поля между вторым датчиком 6026b и неподвижной точкой, например, такой как троакар 6058. Троакар 6058 может содержать магнит 6022 для генерации магнитного поля. При извлечении ствола 6031 через троакар 6058 напряженность магнитного поля, обнаруженная датчиком 6026b, будет меняться пропорционально расстоянию между магнитным датчиком 6026b и магнитом 6022. Первый датчик 6026a или второй датчик 6026b могут генерировать сигнал для двигателя 402 управления шарниром с целью активации приводного процесса выпрямления концевого эффектора 6002, выпрямляемого с помощью датчика, по отношению к стволу 6831.
После завершения приводного процесса выпрямления концевой эффектор 6002, выпрямляемый с помощью датчика, находится в прямом состоянии, как показано на ФИГ. 110. В прямом состоянии концевой эффектор 6002, выпрямляемый с помощью датчика, можно извлечь через троакар 6058 без травмирования пациента и повреждения троакара 6058, а также без необходимости для врача вручную выпрямлять концевой эффектор 6002. В некоторых формах, врач может иметь возможность переопределить приводный процесс выпрямления и оставить концевой эффектор 6002, выпрямляемый с помощью датчика, в шарнирно повернутом положении при его извлечении из троакара 6058.
На ФИГ. 111 представлена одна форма магнитного кольца 6121, которое может прикрепляться к троакару 5858, 6058 или внешней трубке 5960. Магнитное кольцо 6121 может содержать множество магнитов 6122, способных генерировать магнитное поле. Магнитное поле может обнаруживаться магнитным датчиком, находящимся на хирургическом инструменте, например, таким как второй датчик 6026b. Магнитный датчик 6026b может быть выполнен с возможностью удержания концевого эффектора, выпрямляемого с помощью датчика, такого как концевой эффектор 6002, в выпрямленном состоянии, когда магнитный датчик обнаруживает магнитное поле, генерируемое магнитным кольцом 6121. Например, в одной форме магнитный датчик 6026b может быть выполнен с возможностью генерировать сигнал блокировки, предотвращающий шарнирный поворот концевого эффектора, если магнитный датчик 6026b обнаруживает магнитное поле, превышающее заданный порог. Заданный порог может определяться на основании напряженности магнитного поля, генерированного магнитным кольцом 6121, на определенном расстоянии, соответствующем расположению оси шарнира B-B за пределами троакара 5858 или внешней трубки 5960. В некоторых формах магнитный датчик 6026b может активировать приводный процесс выпрямления, когда обнаруженная напряженность магнитного поля превышает заданный порог, и может генерировать сигнал блокировки для предотвращения шарнирного поворота концевого эффектора 6002, выпрямляемого с помощью датчика, до тех пор, пока обнаруженная напряженность магнитного поля не упадет ниже заданного порога.
На ФИГ. 112 и 113 представлена одна форма магнитного датчика 6226, представляющего собой герконовый датчик. Герконовый переключатель может содержать электрический переключатель 6250, управляемый приложенным магнитным полем. Пара контактов может располагаться на язычках из черного металла в герметически изолированной стеклянной оболочке. Контакты могут быть нормально разомкнутыми и замыкаться в присутствии магнитного поля или могут быть нормально замкнутыми и размыкаться в присутствии магнитного поля.
Как показано на ФИГ. 105 и 106, описывается способ управления выпрямляемым концевым эффектором, с помощью датчика. Хотя способ управления концевым эффектором, выпрямляемым с помощью датчика, описывается в настоящем документе с отсылкой к ФИГ. 105 и 106, специалистам в данной области будет очевидно, что способ можно применять с любыми формами концевого эффектора, выпрямляемого с помощью датчика, которые описаны в настоящем документе, например, такими как формы, показанные на ФИГ. 107-113. В одной форме способ может включать обнаружение сильного проксимального перемещения хирургического инструмента 5810 с помощью первого датчика 5826a. Хирургический инструмент 5810 может содержать концевой эффектор 5802, выпрямляемый с помощью датчика. Врач может шарнирно поворачивать концевой эффектор 5802, выпрямляемый с помощью датчика, при лечении. После завершения лечения врач может начать извлекать хирургический инструмент 5810 из тела пациента, перемещая хирургический инструмент 5810 в проксимальном направлении. Проксимальное перемещение хирургического инструмента 5810 может обнаруживаться первым датчиком 5826a. В некоторых формах первый датчик 5826a может представлять собой акселерометр, выполненный с возможностью обнаружения сильного проксимального перемещения хирургического инструмента 5810. Способ может дополнительно включать генерацию сигнала посредством первого датчика 5826a, который указывает на обнаружение сильного проксимального перемещения. Сигнал может быть передан первым датчиком 5826a контроллеру двигателя 402 управления шарниром, например, такому как управляющая схема, как например, управляющая схема 3702, показанная на ФИГ. 82. Предусмотрены дополнительные контроллеры двигателей, описанные по отношению к ФИГ. 84, 114-116 и т. п. Способ может дополнительно включать прием двигателем 402 управления шарниром сигнала от первого датчика 5826a и активацию приводного процесса выпрямления посредством двигателя 402 управления шарниром с целью распрямления угла шарнирного поворота концевого эффектора 5802, выпрямляемого с помощью датчика, в результате принятого сигнала. Приводный процесс выпрямления может вернуть концевой эффектор 5802, выпрямляемый с помощью датчика, в нулевое положение шарнирного поворота.
В некоторых формах способ может дополнительно включать обнаружение сильного проксимального перемещения хирургического инструмента 5810 с помощью второго датчика 5826b. В некоторых формах второй датчик 5826b может представлять собой магнитный датчик приближения, например, датчик Холла или герконовый датчик. Второй датчик 5826b может быть выполнен с возможностью обнаружения расстояния между вторым датчиком 5826b и фиксированной точкой, например, троакаром 5858 или внешней трубкой 5960. Способ управления концевым эффектором 5802, выпрямляемым с помощью датчика, может дополнительно включать генерацию сигнала, указывающего на обнаружение сильного проксимального перемещения с помощью второго датчика 5826b. Второй сигнал может быть передан на двигатель 402 управления шарниром. Способ может дополнительно включать прием двигателем 402 управления шарниром второго сигнала и активацию приводного процесса выпрямления посредством двигателя 402 управления шарниром для распрямления угла шарнирного поворота концевого эффектора 5802, выпрямляемого с помощью датчика. В некоторых формах второй датчик 5826b может генерировать второй сигнал независимо от первого датчика 5826a.
В некоторых формах первый и второй датчики 5826a, 5826b могут функционировать как дополнительные средства проверки процесса выпрямления. Например, в некоторых формах как первый, так и второй из датчиков 5826a, 5826b может посылать сигнал на двигатель 402 управления шарниром для активации процесса выпрямления. Сигнал от первого датчика 5826a или от второго датчика 5826b может заставить двигатель 402 управления шарниром выпрямить концевой эффектор 5802, выпрямляемый с помощью датчика. В некоторых формах приводный процесс выпрямления может не выполняться до тех пор, пока не будут получены оба сигнала как от первого, так и от второго из датчиков 5826a, 5826b. В некоторых формах первый датчик 5826a или второй датчик 5826b может независимо активировать приводный процесс выпрямления, но процесс может быть прерван, если в течение заданного промежутка времени не будет принят сигнал как от первого, так и от второго из датчиков 5826a, 5826b. Например, приводный процесс выпрямления может быть запущен сигналом от первого датчика 5826a. Если в течение заданного промежутка времени не будет принят сигнал от второго датчика 5826b, то приводный процесс выпрямления может быть прерван хирургическим инструментом 5810.
В одной форме в различных хирургических инструментах может использоваться модульная платформа управления двигателем. Например, модульная платформа управления может быть реализована управляющей схемой 3702. На ФИГ. 114 представлена одна форма модульной платформы 6300 управления двигателем, содержащая главный контроллер 6306 и одну или более пар из двигателя и контроллера 6309a-6309c. Платформа 6300 может управлять одним или более двигателями 6318a, 6318b, 6318c. Двигатели 6318a, 6318b, 6318c могут представлять собой любые двигатели, использованные в хирургическом инструменте. Например, в некоторых формах один или более двигателей 6318a, 6318b, 6318c могут соответствовать одному или более из двигателя шарнира 402, пускового двигателя 530, двигателя 560 поворота концевого эффектора и/или двигателя 610 поворота ствола.
В различных формах соответствующие контроллеры 6306, 6309a-6309c могут быть реализованы с использованием одного или более процессоров (например, процессоров, реализованных на управляющей схеме 3702). Модульная платформа 6300 управления двигателем может подходить для управления хирургическим инструментом с двигателем, например, хирургическим инструментом 10, показанным на ФИГ. 1 и 2. В различных формах главный контроллер 6306 может быть смонтирован на дистальной печатной плате 810 или на проксимальной печатной плате 820. Первый контроллер 6314a двигателя функционально соединен с первым двигателем 6318a для подачи одного или более контрольных сигналов на первый двигатель 6318a. Второй контроллер 6314b управления двигателем может быть функционально соединен со вторым двигателем 6318b, а третий контроллер 6314c управления двигателем может быть функционально соединен с третьим двигателем 6318c. Контроллеры 6314a-6314c двигателя имеют электрическую связь с главным контроллером 6306. Главный контроллер 6306 подает контрольные сигналы на контроллеры 6314a-6314c двигателя на основании главного управляющего процесса, который управляет одной или более функциями концевого эффектора 6302. Главный управляющий процесс может представлять собой предварительно заданный процесс, процесс, определенный пользователем, или процесс, генерированный устройством.
В одной форме главный управляющий процесс может определять одно или более хирургических вмешательств, выполняемых хирургическим инструментом 10, которые содержат одну или более функций ствола 30 и концевого эффектора 102. Например, в одной форме главный управляющий процесс может определять для хирургического инструмента 10 операцию разрезания и скрепления. Операция разрезания и скрепления может содержать множество функций хирургического инструмента 10, например, таких как функция эффекторания, функция сшивания, функция разрезания и функция разжимания. Пользователь может обозначить начало операции разрезания и скрепления любым подходящим способом, например, таким как нажатие кнопки или переключателя на рукоятке 20. Специалистам в данной области будет понятно, что можно применять любой подходящий способ для активации одной или более функций хирургического инструмента 10.
В одной форме, когда врач обозначает начало операции разрезания и скрепления, например, путем нажатия кнопки на рукоятке 20, главный контроллер 6306 может генерировать серию контрольных сигналов и подавать контрольные сигналы на один или более контроллеров 6314a-6314c двигателя. Например, операция разрезания и скрепления может начаться в момент времени t0. Главный контроллер 6306 может генерировать первый контрольный сигнал, указывающий, что требуется выполнить функцию эффекторания. Первый контрольный сигнал может быть передан на первый контроллер 6314a двигателя, соединенный с первым двигателем 6318a, выполненным с возможностью управления эффекторающим перемещением концевого эффектора 6302. Первый контроллер 6314a двигателя может в свою очередь подать один или более сигналов на первый двигатель 6318a, активируя первый двигатель 6318a для выполнения поворота узла 190 упора концевого эффектора 102 и эффекторания ткани, находящейся между узлом 190 упора и кассетой 130. Главный контроллер 6306 может запрашивать у первого контроллера 6314a двигателя сигнал состояния до тех пор, пока первый контроллер 6314a двигателя не покажет, что операция эффекторания завершена. В момент времени t1 первый контроллер 6314a двигателя может подать на главный контроллер 6306 сигнал, указывающий, что функция эффекторания завершена.
В момент времени t2 от главного контроллера 6306 может быть передан второй управляющий сигнал, указывающий, что требуется выполнить операцию сшивания и разрезания. Второй контрольный сигнал может быть передан на второй контроллер 6314b двигателя, соединенный со вторым двигателем 6318b. Второй двигатель 6318b может быть выполнен с возможностью управления проксимальным и дистальным перемещением режущего элемента 164 и/или салазок 170, расположенных внутри концевого эффектора 102. Контрольный сигнал операции сшивания и разрезания может заставлять второй контроллер 6314b двигателя активировать второй двигатель 6318b и продвинуть режущий элемент 164 и/или салазки 170 в дистальном направлении, заставляя кассета 130 со скобками выпускать скобки, а режущий элемент 164 разрезать ткань, зажатую в узле упора 190, как более подробно описано выше. В момент времени t3 режущий элемент 164 достигает самой дистальной точки, и второй контроллер 6314b двигателя может подать на главный контроллер 6306 сигнал, показывающий, что операция сшивания и разрезания завершена. Второй контроллер 6314b двигателя может автоматически генерировать для второго двигателя 6318b контрольный сигнал на возвратное перемещение режущего элемента 164, пока режущий элемент 164 не будет полностью оттянут.
После приема сигнала от второго контроллера 6314b двигателя в момент времени t3 главный контроллер 6306 может подать третий контрольный сигнал на первый контроллер 6314a двигателя, указывающий, что требуется выполнить функцию высвобождения. Первый контроллер 6314a двигателя может генерировать контрольный сигнал для первого двигателя 6318a, заставляя первый двигатель 6318a обратить ранее выполненную операцию эффекторания, разжав узел 190 упора. Функция высвобождения может выполняться первым контроллером 6314a двигателя и первым двигателем 6318a одновременно с обратным перемещением второго двигателя 6318b, которое втягивает режущий элемент 164 в его исходное положение. Применение главного контроллера 6306 и раздельных контроллеров 6314a, 6314b двигателей позволяет хирургическому инструменту 10 одновременно выполнять множество операций без чрезмерной нагрузки на раздельные контроллеры 6306, 6314a, 6314b.
Контроллеры 6314a-6314c двигателя могут содержать один или более независимых процессов для отслеживания и управления хирургическими операциями, например, такими как перемещение двигателя. В некоторых формах контроллеры 6314a-6314c двигателя могут быть выполнены с возможностью работы с одним или более механизмами с управляющей обратной связью. Например, в некоторых формах контроллеры 6314a-6314c двигателя могут быть выполнены в виде контроллеров с обратной связью, таких как контроллеры «один вход - один выход» (SISO) или контроллеры «множество входов - множество выходов» (MIMO). В некоторых формах контроллеры 6314a-6314c двигателя могут работать как пропорционально-интегрально-дифференциальные (PID) контролеры. PID-контроллер может работать с управляющей обратной связью, в которой применяются три звена настройки: звено пропорционального регулятора, звено интегрального регулятора и звено дифференциального регулятора. PID-контроллер может содержать управляющий процесс, выполненный с возможностью измерения заданной переменной и сравнения измеренного значения заданной переменной с ожидаемым или установочным значением заданной переменной. PID-контроллер может регулировать управляющую переменную на основании различия между измеренным значением и ожидаемым значением заданной переменной. В некоторых формах контроллеры 6314a-6314c двигателей могут содержать PID-контроллер скорости. Например, первый контроллер 6314a двигателя может измерять заданную переменную, такую как положение двигателя 6314a. Первый контроллер 6314a двигателя может регулировать управляющую переменную, такую как скорость двигателя 6314a, на основании разницы между измеренным положением двигателя 6314a и заданным или ожидаемым положением двигателя 6314a.
В некоторых формах контроллеры 6314a-6314c двигателя могут быть выполнены в виде контроллеров обнаружения ошибок. Контроллер обнаружения ошибок может исполнять процесс обнаружения ошибок. В некоторых формах контроллер обнаружения ошибок может работать с процессом прямого распознавания ошибок, содержащим отслеживание одного или более датчиков, выполненных с возможностью прямого отображения ошибки, что может называться обнаружением ошибок на основе обработки сигналов. В некоторых формах значение, предоставленное датчиком, сравнивается с ожидаемым значением датчика, полученным на основе модели хирургического процесса, управляемого контроллером обнаружения ошибок, что может называться обнаружением ошибок на основе модели. Специалистам в данной области будет понятно, что в контроллере двигателя может использоваться комбинация обнаружения ошибок на основе обработки сигналов и обнаружения ошибок на основе модели.
В некоторых формах контроллеры 6314a-6314c двигателя могут быть выполнены в виде контроллеров с ограничением тока/усилия. Контроллер с ограничением тока/усилия может быть выполнен с возможностью ограничения измеренного значения, например, тока, подаваемого на двигатель, или усилия, развиваемого двигателем, заданной величиной. Например, в одной форме первый контроллер 6314a двигателя может быть выполнен с возможностью ограничения усилия, развиваемого при операции эффекторания, заданной величиной. Датчик усилия может отслеживать усилие, развиваемое первым двигателем 6318a, выполненным с возможностью управления операцией эффекторания в хирургическом инструменте. Если величина усилия, измеренная первым датчиком, соответствует заданному значению, то первый контроллер 6314a двигателя может прекратить работу первого двигателя 6318a. В некоторых формах контроллер 6314a-6314c двигателя может быть выполнен с возможностью отслеживания тока, подаваемого на двигатель 6318a-6318c. Ток, используемый двигателем 6318a-6318c, может служить показателем одной или более функций двигателя 6318a-6318c, такой как скорость двигателя или усилие, развиваемое двигателем в ходе хирургической операции. Если ток, развиваемый двигателем 6318a-6318c, превышает заданное пороговое значение, то контроллер 6314a-6314c двигателя может прекратить работу двигателя, чтобы предотвратить травмирование пациента или повреждение хирургического инструмента.
В некоторых формах контроллеры 6314a-6314c двигателя могут обеспечивать независимую проверку главного управляющего процесса, выполняемого главным контроллером 6306. Например, контроллеры 6314a-6314c двигателя могут проверить, является ли допустимым действие, затребованное главным контроллером 6306, прежде чем выполнять затребованное действие. В некоторых формах контроллер 6314a-6314c двигателя может при проверке допустимости действия применять информацию о состоянии. Например, в одной форме первый контроллер 6314a двигателя может получить команду от главного контроллера 6306 на выполнение операции разрезания и сшивания. Первый контроллер 6314a двигателя может проверить текущее состояние хирургического инструмента, например, находится ли узел упора 190 в зажатом положении. Если информация о состоянии соответствует состоянию, допустимому для выполнения операции разрезания и сшивания, то первый контроллер 6314a двигателя может выполнить операцию разрезания и сшивания. Однако если информация о состоянии не соответствует допустимому состоянию для разрезания и сшивания, то первый контроллер 6314a двигателя может указать на ошибку в главном контроллере 6306 или в главном управляющем процессе. Специалистам в данной области будет понятно, что контроллеры 6314a-6314c двигателя могут содержать один или более управляющих процессов и один или более типов управляющих процессов.
На ФИГ. 115 представлена одна форма модульной платформы 6400 управления двигателем, содержащая главный контроллер 6406 и четыре пары из двигателя и контроллера 6409a-6409d. Модульная платформа 6400 управления двигателем также может быть реализована управляющей схемой 3702, описанной выше в настоящем документе, например, с использованием одного или более процессоров. Модульная платформа 6400 управления двигателем может быть выполнена с возможностью управления различными двигателями. Например, двигатель дистального вращения 6418a может работать аналогично тому, как описано в настоящем документе по отношению к двигателю вращения 560 концевого эффектора. Двигатель 6418b шарнира может работать аналогично тому, как описано в настоящем документе по отношению к двигателю 402 шарнира. Двигатель 6418c проксимального вращения может работать аналогично тому, как описано в настоящем документе по отношению к двигателю 610 шарнира. Операционный двигатель 6418d может работать аналогично тому, как описано в настоящем документе по отношению к пусковому двигателю 530.
Главный контроллер 6406 может быть электрически соединен с одним или более контроллерами 6414a-6414d двигателя. Главный контроллер 6406 может быть соединен с одним или более контроллерами 6414a-6414d двигателя с помощью проводного или беспроводного соединения. В некоторых формах двигатели 6418a-6418d могут содержать связанные с ними кодовые датчики 6416a-6416d положения двигателей, выполненные с возможностью подачи сигнала, указывающего положение ствола двигателя. В некоторых формах кодовые датчики 6416a-6416d положения двигателей могут отсутствовать. В одной форме главный контроллер 6406 может быть выполнен с возможностью связи с любым количеством контроллеров 6414a-6414d двигателя, например, от одного до десяти контроллеров двигателя. В некоторых формах главный контроллер 6406 может быть выполнен с возможностью связи с одним или более дополнительными периферийными контроллерами (не показаны), причем периферийные контроллеры выполнены с возможностью управления одной или более бесприводными хирургическими функциями, например, такими как ультразвуковые функции, электрохирургические функции или любые другие подходящие функции хирургического инструмента.
В одной форме главный контроллер 6406 может синхронно связываться с контроллерами 6414a-6414d двигателя. Связь, исходящая от главного контроллера 6406, может включать, например, передачу команд для исполнения определенной подпрограммы или функции контроллера 6414a-6414d двигателя, опрос контроллеров 6414a-6414d двигателя для обновления данных об их состоянии, а также прием информации обратной связи от контроллеров 6414a-6414d двигателя. Синхронная связь может быть прямой связью между главным контроллером 6406 и контроллерами 6414a-6414d двигателя, причем взаимодействия синхронизированы по времени. Например, в форме, показанной на ФИГ. 114, главный контроллер 6406 может взаимодействовать с каждым из контроллеров 6414a-6414d двигателя в заданных временных промежутках. В другой форме между контроллерами 6414a-6414d двигателя может передаваться маркер, дающий контроллеру 6414a-6414d двигателя, который в настоящее время владеет маркером, право взаимодействовать с главным контроллером 6406 в течение заданного периода времени.
В одной форме главный контроллер 6406 может выполнять главный управляющий процесс. Главный управляющий процесс может отслеживать входные сигналы пользователя, выполнять операции хирургического инструмента 10, выводить сигналы обратной связи для пользователя или исполнять любые другие функции хирургического инструмента 10. Например, в одной форме главный контроллер 6406 может выполнять главный управляющий процесс, содержащий операцию разрезания и скрепления. В некоторых формах главный управляющий процесс может подавать контрольные сигналы каждому из контроллеров 6414a-6414d двигателя. Выполнение раздельных функций двигателей 6418a-6418d может управляться контроллерами 6414a-6414d двигателя. В некоторых формах главный управляющий процесс может активировать или останавливать один или более двигателей 6418-6418d на основе прикрепления или снятия модульного хирургического компонента, такого как модульный ствол 30 или рабочая часть 100. Главный контроллер 6406 может подавать контрольные сигналы контроллерам 6414a-6414d двигателя и может принимать сигналы о состоянии от контроллеров 6414a-6414d двигателя. Сигналы о состоянии могут включать, например, сигнал о завершении функции, сигнал об ошибке, сигнал о бездействии или сигнал обратной связи.
В некоторых формах сигнал функции может указывать, например, состояние действия или завершения функции, выполняемой парами из двигателя и контроллера 6409a-6409d. Например, сигнал функции может показывать, что выполняется операция эффекторания или что эта операция завершена. Сигнал функции также может указывать результат операции, например, такой как величина усилия, приложенного к ткани, зажатой в ходе операции эффекторания. Контроллер 6414a-6414d двигателя может генерировать сигнал об ошибке, если контроллер 6414a-6414d двигателя обнаруживает ошибку связанного с ним двигателя 6418a-6418d или ошибку при завершении хирургической операции. Сигнал об ошибке может заставить главный контроллер 6406 сгенерировать сигнал об ошибке для оператора, например, визуальный сигнал или звуковой сигнал. Сигнал об ошибке также может заставить главный контроллер 6406 послать контрольные сигналы контроллерам 6414a-6414d двигателя для остановки всех текущих выполняемых функций.
Сигнал бездействия может направляться контроллерами 6414a-6414d двигателя к главному контроллеру 6406, чтобы указать, что соответствующий двигатель 6418a-6418d бездействует и может быть использован для выполнения соответствующей функции хирургического инструмента 10. В одной форме сигнал бездействия может показывать, что двигатель 6418a-6418d выполнил функцию. Например, в одной форме первый контроллер 6414a двигателя может получить от главного контроллера 6406 контрольный сигнал на выполнение операции эффекторания. Первый контроллер 6414a двигателя может преобразовать контрольный сигнал от главного контроллера 6406 в один или более контрольных сигналов для двигателя 6418a. После того как двигатель 6418a выполнил указанную функцию, контроллер 6414a двигателя может передать сигнал бездействия главному контроллеру 6406, указывая, что двигатель 6418a завершил выполнение заданной функции.
В различных формах контроллеры 6414a-6414d двигателя могут направлять сигнал обратной связи главному контроллеру 6406. С главным контроллером 6406 могут быть связаны один или более устройств обратной связи (не показаны) для передачи сигнала обратной связи оператору. Сигналы обратной связи, полученные от контроллеров 6414a-6414d двигателей, могут быть преобразованы главным контроллером 6406 в контрольные сигналы для устройств обратной связи. В некоторых формах контроллеры 6414a-6414d двигателя могут передавать сигналы обратной связи напрямую устройству обратной связи.
В некоторых формах синхронное взаимодействие между главным контроллером 6406 и контроллерами 6414a-6414d двигателей может быть прервано переопределяющим сигналом. Переопределяющий сигнал может заставлять главный контроллер 6406 прекратить синхронное взаимодействие и связаться с контроллером 6414a двигателя, генерирующим переопределяющий сигнал. В различных формах переопределяющий сигнал может быть генерирован контроллером 6414a двигателя в результате сбоя двигателя, входного сигнала от пользователя или на основании заданного порога в одном или более сигналах обратной связи. Переопределяющий сигнал может заставить главный контроллер 6406 отправить сигнал каждому из контроллеров 6414a-6414d двигателя на прекращение работы всех двигателей 6418a-6418d, пока ситуация, вызвавшая генерацию переопределяющего сигнала, не будет разрешена. В одной форме главный контроллер 6406 может генерировать сигнал для устройства обратной связи, чтобы уведомить оператора о переопределяющем сигнале.
На ФИГ. 116 представлена одна форма двухконтроллерной модульной платформы 6500 управления двигателем. Платформа 6500 также может быть реализована управляющей схемой 3702, как описано в настоящем документе. Двухконтроллерная модульная платформа 6500 управления двигателем содержит главный контроллер 6506, ведомый контроллер 6507 и четыре пары из двигателя и контроллера 6509a-6509d. Модульная платформа 6400 управления двигателем может быть выполнена с возможностью управления двигателями 6518a, 6518b, 6518c, 6518c. Например, двигатель дистального вращения 6518a может работать аналогично тому, как описано в настоящем документе по отношению к двигателю вращения 560 концевого эффектора. Двигатель 6518b шарнира может работать аналогично тому, как описано в настоящем документе по отношению к двигателю 402 шарнира. Двигатель 6518c проксимального вращения может работать аналогично тому, как описано в настоящем документе по отношению к двигателю 610 шарнира. Операционный двигатель 6518d может работать аналогично тому, как описано в настоящем документе по отношению к пусковому двигателю 530.
Модульная платформа 6400 управления двигателем может быть выполнена с возможностью управления двигателем 402 шарнира, пусковым двигателем 530, двигателем вращения концевого эффектора или «двигателем 560 дистального вращения» и двигателем вращения ствола или «двигателем 610 проксимального вращения». Каждый из главного контроллера 6506 и ведомого контроллера 6507 может быть связан с подмножеством имеющихся контроллеров двигателя. Например, в представленной форме главный контроллер 6506 связан с первым и вторым контроллерами 6526a, 6526b двигателя, а ведомый контроллер 6507 связан с третьим и четвертым контроллерами 6526c, 6526d двигателя. Главный контроллер 6506 и ведомый контроллер 6507 могут находиться в электрической связи. В некоторых формах ведомый контроллер 6507 может размещаться на дистальной печатной плате 810 или на проксимальной печатной плате 820. Ведомый контроллер 6507 может уменьшать нагрузку на главный контроллер 6506, уменьшая количество контроллеров 6526a-6526d двигателя, с которыми главный контроллер 6506 должен взаимодействовать и которыми должен управлять. Главный контроллер 6506 и ведомый контроллер 6507 могут принимать входные сигналы 6508 от одного или более контроллеров.
В одной форме главный контроллер 6506 может подавать контрольные сигналы напрямую на первый контроллер 6526a двигателя и второй контроллер 6526 двигателя. Главный контроллер 6506 также может подавать контрольные сигналы на ведомый контроллер 6507. Ведомый контроллер может подавать контрольные сигналы на третий контроллер 6526c двигателя и четвертый контроллер 6526d двигателя. Благодаря уменьшению количества контроллеров 6526a-6526d двигателя, которые главный контроллер 6506 должен опрашивать и которыми должен управлять, двухконтроллерная модульная платформа 6500 управления двигателем может увеличивать время на ответ или загружать больше вычислительной мощности главного контроллера 6506 другими задачами. В одной форме главный контроллер 6506 может исполнять главный управляющий процесс, а ведомый контроллер 6507 может исполнять вспомогательный управляющий процесс для генерации одного или более сигналов для контроллеров 6526a-6526d двигателя на основе входных сигналов от главного контроллера 6506. В одной форме ведомый контроллер 6507 может принимать контрольные входные сигналы от одного или более пользовательских элементов управления, например, таких как кнопка эффекторания или пусковой переключатель. В одной форме главный контроллер 6506 может связываться с одним или более ведомыми контроллерами 6507 и может не подавать никаких контрольных сигналов непосредственно контроллерам 6526a-6526d двигателя.
В одной форме в систему могут быть добавлены дополнительные ведомые контроллеры 6507 для управления дополнительными контроллерами двигателя или хирургическими модулями. В одной форме ведомый контроллер 6507 может использоваться только при потребности в заданном пороговом числе контроллеров двигателя. Например, в одной форме, показанной на ФИГ. 115, четыре контроллера 6526a-6526d двигателя соединены с двухконтроллерной модульной платформой 6500 управления двигателем. Каждый из главного контроллера 6506 и ведомого контроллера 6507 связан с двумя контроллерами 6526a-6526d двигателя. Остановка одного или более двигателей, например, в результате замены ствола 30 другим стволом, требующим только два двигателя для шарнирного поворота, может приводить к остановке ведомого контроллера 6507, поскольку не требуется дополнительная вычислительная мощность ведомого контроллера 6507 для снижения нагрузки на главный контроллер 6506. В некоторых формах остановка одного или более контроллеров 6526a-6526d двигателя может приводить к тому, что оставшиеся контроллеры двигателя приписываются к бездействующему ведомому контроллеру 6507. Например, остановка третьего и четвертого двигателей 6518c, 6518d может приводить к тому, что ведомый контроллер 6507 будет бездействовать. Второй контроллер 6526b двигателя можно отсоединить от главного контроллера 6506 и соединить с ведомым контроллером 6507, чтобы уменьшить вычислительную нагрузку на главный контроллер 6506. Один или более процессов балансировки нагрузки могут исполняться в составе главного управляющего процесса для обеспечения оптимизированного распределения управления между главным контроллером 6506 и одним или более ведомыми контроллерами 6507.
Возвращаясь к ФИГ. 114-116, можно описать способ управления модульным хирургическим инструментом 10, содержащим множество контроллеров двигателя. Хотя способ управления модульным хирургическим инструментом 10 описывается по отношению к ФИГ. 114-116, специалистам в данной области будет понятно, что способ можно применить к любому варианту осуществления хирургического инструмента или к различным управляющим платформам, описанным в настоящем документе. Способ может включать генерацию главным контроллером 6506 главного управляющего процесса, содержащего один или более контрольных сигналов. Способ может дополнительно включать передачу генерированных контрольных сигналов от главного контроллера 6506 к одному или более контроллерам 6526a-6526d двигателя. Контроллеры 6526a-6526d двигателя могут принимать переданные контрольные сигналы. В некоторых формах подмножество контрольных сигналов, принятых первым контроллером 6526a двигателя, может содержать контрольные сигналы, переданные главным контроллером 6506 в течение определенного периода времени, в течение которого главный контроллер 6506 и первый контроллер 6526a двигателя имеют синхронную связь. Способ может дополнительно включать управление посредством контроллеров 6526a-6526d двигателя одним или более связанными двигателями 6518a-6518d на основе контрольных сигналов, от главного контроллера 6506.
В некоторых формах способ может включать передачу главным контроллером 6506 одного или более контрольных сигналов ведомому контроллеру 6507. Ведомый контроллер 6507 может иметь электрическую связь с одним или более контроллерами 6526c-6526d двигателя. Ведомый контроллер 6507 может исполнять вспомогательный управляющий процесс, представляющий собой генерацию одного или более контрольных сигналов для двигателя на основании входных сигналов, принятых от главного контроллера 6506. Вспомогательный управляющий процесс может дополнительно содержать передачу ведомым контроллером 6507 контрольных сигналов для двигателя одному или более электрически связанным контроллерам 6526c-6526d двигателя. Способ может дополнительно включать управление посредством контроллеров 6526c-6526d двигателя одним или более связанными двигателями в результате приема контрольных сигналов для двигателя. В различных формах часть генерированных контрольных сигналов для двигателя может синхронно передаваться каждому из контроллеров 6526c-6526d двигателя в течение заданного периода времени.
На ФИГ. 117 представлена одна форма главного управляющего процесса 6600, который может исполняться главным контроллером, например, таким как главные контроллеры, показанные на ФИГ. 114-116, или любой другой подходящий главный контроллер. В одной форме хирургический инструмент 10 может содержать четыре двигателя, например, таких как двигатель 402 шарнира, пусковой двигатель 530, двигатель поворота концевого эффектора или «двигатель 560 дистального вращения» и двигатель поворота ствола или «двигатель 610 проксимального вращения», а также джойстик 842. Хирургический инструмент 10 может быть выполнен с возможностью выполнения функции дистального поворота, функции захватывания, функции эффекторания и функции пуска. Хирургический инструмент 10 может содержать одну или более кнопок для управления различными операциями хирургического инструмента 10, например, таких как кнопка исходного положения, кнопка отпускания, кнопка захвата, кнопка эффекторания или кнопка пуска. Хирургический инструмент 10 может дополнительно содержать светодиод для передачи пользователю визуального сигнала обратной связи относительно работы хирургического инструмента 10.
В некоторых формах при активации хирургического инструмента 10 главный контроллер 6406 переводит устройство в основной режим. В представленном главном управляющем процессе 6600 основной режим представляет собой состояние 6602 шарнирного поворота. Состояние 6602 шарнирного поворота может включать активацию трех или четырех доступных двигателей. Активированные двигатели могут управлять поворотом ствола 30 (например, двигатель 610 поворота ствола), концевого эффектора 102 (например, двигатель 560 поворота концевого эффектора) и/или шарнирного поворота концевого эффектора 102 (например, двигатель 410 шарнира). В основном режиме шарнирного поворота джойстик 842 может быть активен. В состоянии 6602 шарнирного поворота джойстик 842 можно применять для управления шарнирным поворотом или поворотом ствола 30 и концевого эффектора 102. Функция дистального поворота может быть активна (или доступна), когда функции захвата, эффекторания и пуска недоступны. Кнопка исходного положения также может быть активирована в основном состоянии. Светодиод может светиться зеленым, указывая, что хирургический инструмент 10 находится в том состоянии, в котором хирургический инструмент 10 можно безопасно перемещать.
Пользователь может нажать кнопку 6604 исходного положения, заставляя хирургический инструмент 10 вернуться в исходное состояние 6606, например, начальное состояние, в котором концевой эффектор 102 выпрямлен по отношению к стволу 30, а ствол 30 и концевой эффектор 102 возвращены в состояние нулевого поворота. Исходное состояние 6606 может быть полезно для перехода от одной операции к другой, или оно может позволять пользователю быстро изменить ориентацию хирургического инструмента 10 во время лечения. После достижения исходного состояния 6606 главный управляющий процесс 6600 может вернуться 6605 к основному состоянию 6602 шарнирного поворота.
В одной форме концевой эффектор 102, показанный на ФИГ. 1 и 2, может быть разъемно соединен со стволом 30, что позволяет прикреплять к стволу 30 разные инструменты. Ствол 30 может быть разъемно соединен с рукояткой 20, что позволяет прикреплять к хирургическому инструменту 10 различные стволы. В одной форме главный контроллер 6406 может воспринимать отделение 6608 концевого эффектора 102 или ствола 30 от хирургического инструмента 10 и может запрещать работу хирургического инструмента 10 до тех пор, пока новый ствол или инструмент не будут присоединены к хирургическому инструменту 10 и пока хирургический инструмент 10 не будет возвращен в исходное состояние 6606. После того как главный управляющий процесс 6600 обнаружит новый концевой эффектор 102 и вернется в исходное состояние 6606, главный управляющий процесс 6600 может перейти в основное состояние 6602.
В одной форме к хирургическому инструменту 10 может быть прикреплен концевой эффектор 102. Концевой эффектор 102 может быть выполнен с возможностью выполнения функции захвата. Функция захвата может представлять собой захват участка ткани между узлом 190 упора и кассетой 130 концевого эффектора 102. Хирургический инструмент 10 может содержать кнопку захвата для активации функции захвата. Когда пользователь нажимает 6614 на кнопку захвата, хирургический инструмент 10 может перейти в режим захвата 6616, блокирующий перемещение концевого эффектора 102, такое как поворот или шарнирный поворот по отношению к стволу 30. Режим захвата 6616 может активировать четвертый двигатель (например, пусковой двигатель 530), заставляя часть концевого эффектора 102 зажать участок ткани, например, перемещая узел 190 упора из открытого положения в закрытое положение. Кнопка эффекторания может активироваться, когда хирургический инструмент 10 входит в состояние захвата.
В некоторых формах врач может нажать 6620 кнопку эффекторания, заставляя хирургический инструмент 10 войти в режим 6622 эффекторания. В режиме 6622 эффекторания хирургический инструмент 10 может блокировать четвертый двигатель для предотвращения высвобождения участка ткани при последующей работе. Режим 6622 эффекторания может активировать кнопку пуска, размещенную на рукоятке 20. После того как хирургический инструмент 10 вошел в режим 6622 эффекторания, главный контроллер 6406 может изменить цвет светодиода на синий, указывая врачу, что ткань зажата в узле 190 упора и что можно выполнить пуск хирургического инструмента 10 для выполнения операции сшивания и разрезания.
Врач может нажать 6626 кнопку пуска, заставляя хирургический инструмент 10 войти в режим 6628 пуска. В режиме 6628 пуска хирургический инструмент 10 может деактивировать двигатели, выполненные с возможностью управления перемещением хирургического инструмента 10, такие как, например, двигатели 1-3. Режим 6628 пуска может активировать четвертый двигатель, который может быть выполнен с возможностью управления операцией сшивания и разрезания, как описано выше. Кнопку пуска можно удерживать нажатой, заставляя главный контроллер 6406 генерировать контрольные сигналы для контроллера двигателя, связанного с четвертым двигателем, с целью активации операции сшивания и разрезания, заставляя режущую часть 164 и/или салазки 170 выдвинуться внутри кассеты 130 со скобками, находящейся в концевом эффекторе 102. Во время пусковой последовательности главный контроллер 6406 может изменить цвет светодиода на красный, предупреждая врача о том, что хирургический инструмент 10 выполняет пуск. Главный контроллер 6406 может установить для «маркера выполненного пуска» значение «истина», указывая, что хирургический инструмент выполнил пуск и не может выполнить пуск повторно. Главный контроллер 6406 или контроллер двигателя, связанный с четвертым двигателем, может автоматически оттянуть режущую часть 164, когда режущая часть 164 достигнет дистального конца концевого эффектора 102. После того как режущая часть 164 завершит возвратный такт и вернется в исходное положение, главный управляющий процесс 6600 может вернуться 6630 в состояние 6622 эффекторания.
Врач может деактивировать 6624 состояние 6622 эффекторания, нажав кнопку эффекторания. Главный управляющий процесс 6600 генерирует один или более контрольных сигналов для возврата в состояние 6616 захвата после деактивации состояния 6622 эффекторания. Затем врач может деактивировать 6618 состояние 6616 захвата и выполнить переход к состоянию 6602 шарнирного поворота или в любое другое подходящее основное состояние. Специалистам в данной области будет понятно, что главный управляющий процесс 6600 можно модифицировать, чтобы он подходил к любой хирургической операции или функции, которую может выполнить хирургический инструмент 10 или любой прикрепленный хирургический модуль. В некоторых формах главный управляющий процесс 6600 может быть автоматически выполнен на основании присоединенных стволов, концевых эффекторов или модулей электропитания.
В соответствии с одной общей формой предложен хирургический инструмент, содержащий узел рукоятки, который выполнен с возможностью одновременной и независимой электрической генерации по меньшей мере двух отдельных поворотных управляющих перемещений. Хирургический инструмент может дополнительно включать узел удлиненного ствола, функционально взаимодействующий с узлом рукоятки с целью независимого и одновременного приема и передачи по меньшей мере двух отдельных поворотных управляющих перемещений к концевому эффектору, функционально соединенному с узлом удлиненного ствола.
В соответствии с еще одной общей формой предложен хирургический инструмент, содержащий узел рукоятки, который выполнен с возможностью одновременной и независимой генерации по меньшей мере трех отдельных поворотных управляющих перемещений. Хирургический инструмент может дополнительно включать узел удлиненного ствола, функционально взаимодействующий с узлом рукоятки с целью независимого и одновременного приема и передачи по меньшей мере трех отдельных поворотных управляющих перемещений к концевому эффектору, функционально соединенному с узлом удлиненного ствола.
В соответствии с еще одной общей формой предложен хирургический инструмент, содержащий приводную систему, которая выполнена с возможностью электрической генерации множества отдельных поворотных управляющих перемещений. Хирургический инструмент может дополнительно включать узел удлиненного ствола, функционально соединенный с приводной системой в целях приема от нее первого поворотного управляющего перемещения для поворота узла удлиненного ствола вокруг оси ствола. Узел удлиненного ствола может быть выполнен с возможностью приема и передачи второго поворотного управляющего перемещения от приводной системы к хирургическому концевому эффектору, функционально соединенному с узлом удлиненного ствола, чтобы заставить хирургический концевой эффектор поворота вокруг оси ствола относительно узла удлиненного ствола. Узел удлиненного ствола дополнительно может быть выполнен с возможностью приема и передачи третьего поворотного управляющего перемещения от приводной системы к шарнирному сочленению, которое сообщается с узлом удлиненного ствола и хирургическим концевым эффектором, с целью шарнирного поворота хирургического концевого эффектора вокруг оси шарнира, по существу перпендикулярной оси ствола.
В соответствии с еще одной общей формой предложено шарнирное сочленение для хирургического инструмента, которое включает узел удлиненного ствола, и приводная система, которая выполнена с возможностью генерации и передачи множества поворотных управляющих перемещений на узел удлиненного ствола. По меньшей мере в одной форме шарнирное сочленение содержит проксимальную часть сочленения, соединенную с узлом удлиненного ствола, и дистальную часть сочленения, соединенную с возможностью перемещения с проксимальным участком сочленения и выполненную с возможностью взаимодействия с хирургическим концевым эффектором. Первый блок шестерен может функционально взаимодействовать с проксимальным участком пускового ствола узла удлиненного ствола. Дистальный пусковой ствол может функционально взаимодействовать с хирургическим концевым эффектором для передачи поворотного пускового перемещения от проксимального пускового ствола к хирургическому концевому эффектору с обеспечением возможности шарнирного поворота дистальной части сочленения относительно проксимальной части сочленения. Второй блок шестерен может функционально взаимодействовать с проксимальным участком поворотного ствола узла удлиненного ствола с целью передачи дистального поворотного управляющего перемещения на хирургический концевой эффектор, чтобы заставить хирургический концевой эффектор поворачиваться относительно узла удлиненного ствола и при этом обеспечить возможность шарнирного поворота дистальной части сочленения относительно проксимальной части сочленения.
В соответствии с еще одной общей формой предложено шарнирное сочленение для хирургического инструмента, который имеет узел удлиненного ствола, и приводная система, которая выполнена с возможностью генерации и передачи множества поворотных управляющих перемещений на узел удлиненного ствола. По меньшей мере в одной форме шарнирное сочленение включает проксимальную скобу, соединенную с узлом удлиненного ствола, и дистальную скобу, шарнирно соединенную штифтом с проксимальной скобой, с целью избирательного вращательного перемещения относительно нее вокруг оси шарнира, по существу перпендикулярной оси ствола, образуемой узлом удлиненного ствола. Первый блок шестерен может поддерживаться в зоне шестерен, образованной между проксимальной и дистальной скобами таким образом, чтобы никакая часть первого блока шестерен не проходила радиально за пределы любой части шарнирного сочленения. Первый блок шестерен может функционально взаимодействовать с проксимальным участком пускового ствола узла удлиненного ствола. Дистальный пусковой ствол может функционально взаимодействовать с хирургическим концевым эффектором для передачи поворотного пускового перемещения от проксимального пускового ствола к хирургическому концевому эффектору с обеспечением возможности вращательного перемещения дистальной скобы относительно проксимальной скобы. Второй блок шестерен может поддерживаться в зоне шестерен таким образом, чтобы никакая часть первого блока шестерен не проходила радиально за пределы любой части шарнирного сочленения. Второй блок шестерен может функционально взаимодействовать с проксимальным участком поворотного ствола узла удлиненного ствола с целью передачи дистального поворотного управляющего перемещения на хирургический концевой эффектор, чтобы заставить хирургический концевой эффектор поворачиваться относительно узла удлиненного ствола и при этом обеспечить шарнирный поворот дистальной скобы относительно проксимальной скобы.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий приводную систему, которая выполнена с возможностью генерации множества поворотных управляющих перемещений. Узел удлиненного ствола выполнен с возможностью стыковки с приводной системой и может содержать сегмент внешнего ствола, функционально взаимодействующий с приводной системой для приема от нее управляющих перемещений дистального поворота. Ствол шарнирного поворота может функционально взаимодействовать с приводной системой для приема от нее поворотных перемещений шарнирного поворота. Узел удлиненного ствола может дополнительно включать проксимальный сегмент пускового ствола, функционально взаимодействующий с приводной системой для приема от нее поворотных пусковых перемещений. Хирургический инструмент может дополнительно включать шарнирное сочленение, которое может включать проксимальную скобу, соединенную с узлом удлиненного ствола, и дистальную скобу, шарнирно соединенную штифтом с проксимальной скобой, с целью избирательного вращательного перемещения относительно нее вокруг оси шарнира, по существу перпендикулярной оси ствола, образуемой узлом удлиненного ствола. Узел соединительного элемента может стыковаться с возможностью поворота с дистальной скобой и может быть выполнен с возможностью прикрепления к хирургическому концевому эффектору. Дистальный сегмент пускового ствола может функционально поддерживаться узлом соединительного элемента и может быть выполнен с возможностью взаимодействия с частью приводного ствола хирургического концевого эффектора. Первый блок шестерен может функционально взаимодействовать с проксимальным сегментом пускового ствола и дистальным сегментом пускового ствола для передачи поворотных пусковых перемещений от проксимального сегмента пускового ствола к дистальному сегменту пускового ствола, позволяя при этом избирательно вращать дистальную скобу относительно проксимальной скобы. Второй блок шестерен может функционально взаимодействовать с проксимальным поворотным стволом для передачи управляющих перемещений дистального поворота на узел соединительного элемента при обеспечении возможности избирательного вращения дистальной скобы относительно проксимальной скобы. Соединительная планка привода шарнира может взаимодействовать со стволом шарнира и дистальной скобой, и ее перемещения могут ограничиваться осевым перемещением относительно шарнирного сочленения в результате приложения перемещений шарнирного поворота к стволу шарнира.
В соответствии с еще одной общей формой предложена крышка для шарнирного сочленения, которая поддерживается в узле удлиненного ствола хирургического инструмента, функционально соединенном с хирургическим концевым эффектором, имеющим в себе по меньшей мере один проводник концевого эффектора. По меньшей мере в одной форме крышка представляет собой неэлектропроводящий полый кожух, имеющий открытый дистальный конец и открытый проксимальный конец, и канал для приема сочленения, проходящий между ними и предназначенный для введения в него шарнирного сочленения. Полый кожух выполнен так, чтобы давать частям шарнирного сочленения избирательно шарнирно поворачиваться относительно друг друга и при этом по существу заключать эти части внутри себя. По меньшей мере один электропроводящий путь проходит от дистального конца полого кожуха до проксимального конца полого кожуха. Каждый из по меньшей мере одного электропроводящего пути имеет часть дистального конца, выполненную с возможностью электрического соединения с соответствующим проводником концевого эффектора, когда концевой эффектор соединен с узлом удлиненного ствола, и часть проксимального конца, выполненную с возможностью электрического соединения с соответствующим проводником ствола в узле удлиненного ствола.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий узел удлиненного ствола, который имеет в себе по меньшей мере один электрический проводник ствола, а также шарнирное сочленение. По меньшей мере в одной форме шарнирное сочленение содержит проксимальную часть сочленения, соединенную с узлом удлиненного ствола. Дистальный участок сочленения соединен с возможностью перемещения с проксимальным участком сочленения для избирательного шарнирного поворота относительно нее. Узел соединительного элемента соединен с возможностью поворота с дистальной частью сочленения с целью избирательного поворота относительно нее. Узел соединительного элемента может быть выполнен с возможностью разъемного соединения с хирургическим концевым эффектором и формирования электропроводящего пути соединительного элемента от проводника концевого эффектора в концевом эффекторе к шарнирному сочленению. Хирургический инструмент может дополнительно включать проводник шарнирного сочленения, контактирующий с электропроводящим путем соединительного элемента, который пересекает шарнирное сочленение и контактирует с соответствующим проводником ствола с образованием между ними электропроводящего пути.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий управляющую систему, которая содержит по меньшей мере один электрический управляющий компонент. Хирургический инструмент дополнительно включает узел удлиненного ствола, который имеет электрический проводник ствола, функционально связанный по меньшей мере с одним из электрических управляющих компонентов. Хирургический инструмент может дополнительно включать шарнирное сочленение, которое включает проксимальную скобу, соединенную с узлом удлиненного ствола. Дистальная скоба соединена с возможностью поворота с проксимальной скобой с целью избирательного вращательного перемещения относительно нее. Хирургический инструмент может дополнительно включать узел соединительного элемента, соединенный с дистальной скобой, и хирургический концевой эффектор, разъемно соединенный с узлом соединительного элемента. Хирургический концевой эффектор может включать проводник концевого эффектора, размещенный с возможностью электрического контакта с электропроводящим путем соединительного элемента, образованным в узле соединительного элемента, когда хирургический концевой эффектор соединен с узлом соединительного элемента. Проводник шарнирного сочленения может пересекать шарнирное сочленение и находиться в электрическом контакте с электропроводящим путем, идущим через узел соединительного элемента и проводник ствола.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий узел рукоятки, с которым функционально соединяется узел удлиненного ствола и который выполнен с возможностью функционального соединения с хирургическим концевым эффектором. Двигатель поддерживается в узле рукоятки и выполнен с возможностью подачи поворотного перемещения на один из узла удлиненного ствола и присоединенного к нему хирургического концевого эффектора. Узел управления с поворотной ручкой функционально поддерживается на узле рукоятки и сообщается с двигателем таким образом, что когда часть исполнительного механизма узла управления с поворотной ручкой вращается в первом направлении, двигатель подает поворотное перемещение на один из узла удлиненного ствола и концевого эффектора в первом направлении, а когда часть исполнительного механизма вращается во втором направлении, двигатель подает поворотное перемещение на один из узла удлиненного ствола и концевого эффектора во втором направлении.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий узел рукоятки, с которым с возможностью поворота соединяется узел удлиненного ствола и который выполнен с возможностью функционального прикрепления к хирургическому концевому эффектору. Двигатель поддерживается в узле рукоятки и выполнен с возможностью подачи поворотного перемещения на узел удлиненного ствола для избирательного поворота вокруг оси ствола. Хирургический инструмент дополнительно включает узел управления с поворотной ручкой, который включает элемент исполнительного механизма с поворотной ручкой, шарнирно поддерживаемый относительно узла рукоятки. Первый магнит поддерживается на элементе исполнительного механизма с поворотной ручкой, и второй магнит поддерживается на элементе исполнительного механизма с поворотной ручкой. Неподвижный датчик расположен центрально между первым и вторым магнитами, когда элемент исполнительного механизма с поворотной ручкой находится в неактивированном положении. Неподвижный датчик сообщается с двигателем таким образом, что когда исполнительный механизм с поворотной ручкой поворачивается в первом направлении, двигатель подает поворотное перемещение на узел удлиненного ствола в первом направлении, а когда элемент исполнительного механизма с поворотной ручкой поворачивается во втором направлении, двигатель подает поворотное перемещение на узел удлиненного ствола во втором направлении.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий узел рукоятки, с которым с возможностью поворота соединяется узел удлиненного ствола и который выполнен с возможностью функционального прикрепления к хирургическому концевому эффектору таким образом, что концевой эффектор может избирательно поворачиваться вокруг оси ствола относительно узла удлиненного ствола. Двигатель поддерживается в узле рукоятки и выполнен с возможностью подачи поворотного перемещения на концевой эффектор или соединительную часть узла удлиненного ствола, с которым соединяется концевой эффектор, для избирательного поворота его вокруг оси ствола. Хирургический инструмент дополнительно включает узел управления с поворотной ручкой, который включает элемент исполнительного механизма с поворотной ручкой, шарнирно поддерживаемый относительно узла рукоятки. Первый и второй магниты поддерживаются на элементе исполнительного механизма с поворотной ручкой. Неподвижный датчик расположен центрально между первым и вторым магнитами, когда элемент исполнительного механизма с поворотной ручкой находится в неактивированном положении. Неподвижный датчик сообщается с двигателем таким образом, что когда исполнительного механизма с поворотной ручкой поворачивается в первом направлении, двигатель подает поворотное перемещение на концевой эффектор или соединительную часть в первом направлении, а когда элемент исполнительного механизма с поворотной ручкой поворачивается во втором направлении, двигатель подает поворотное перемещение на концевой эффектор или соединительную часть во втором направлении.
В соответствии с еще одной общей формой предложен хирургический инструмент, включающий корпус, в котором установлено множество двигателей. Хирургический инструмент дополнительно включает узел управляющего джойстика, который включает первый узел переключателей, поддерживаемый в корпусе с возможностью перемещения, и включает джойстик, установленный на нем с возможностью перемещения таким образом, что вращательное перемещение джойстика относительно первого узла переключателей приводит к передаче по меньшей мере одного соответствующего контрольного сигнала к по меньшей мере одному из связанных с ним двигателей. Джойстиковый узел дополнительно включает второй узел переключателей, содержащий первый датчик и второй датчик, выполненные с возможностью перемещения вместе с первым узлом переключателей таким образом, что перемещение второго датчика относительно первого датчика приводит к передаче по меньшей мере одного иного контрольного сигнала к по меньшей мере еще одному из связанных с ним двигателей.
В соответствии с еще одной общей формой предложен хирургический инструмент, который включает узел рукоятки, оснащенный узлом удлиненного ствола, который поддерживается с возможностью поворота относительно него. Двигатель проксимального вращения поддерживается в узле рукоятки и выполнен с возможностью подачи проксимальных поворотных перемещений на узел удлиненного ствола, что заставляет узел удлиненного ствола поворачиваться относительно узла рукоятки вокруг оси ствола. Хирургический концевой эффектор функционально соединен с узлом удлиненного ствола и предназначен для проведения хирургического вмешательства при приложении к нему по меньшей мере одного пускового перемещения. Пусковой двигатель поддерживается в узле рукоятки и выполнен с возможностью приложения пусковых перемещений на часть узла удлиненного ствола с целью передачи к хирургическому концевому эффектору. Хирургический инструмент дополнительно включает узел управляющего джойстика, который содержит первый узел переключателей, поддерживаемый в узле рукоятки с возможностью перемещения, и включает джойстик, установленный на нем с возможностью перемещения таким образом, что поворотное перемещение джойстика относительно первого узла переключателей приводит к передаче по меньшей мере одного соответствующего контрольного сигнала к двигателю проксимального вращения. Джойстиковый управляющий узел дополнительно включает второй узел переключателей, который содержит первый датчик и второй датчик, выполненные с возможностью перемещения вместе с первым узлом переключателей таким образом, что перемещение второго датчика относительно первого датчика приводит к передаче по меньшей мере одного иного контрольного сигнала к пусковому двигателю.
В соответствии с еще одной общей формой предложен хирургический инструмент, который включает узел рукоятки, оснащенный узлом удлиненного ствола, который поддерживается с возможностью поворота относительно него. Хирургический инструмент дополнительно включает шарнирное сочленение, которое содержит проксимальную часть сочленения, соединенную с узлом удлиненного ствола, и дистальную часть сочленения, соединенную с возможностью перемещения с проксимальным участком сочленения. Двигатель шарнира поддерживается в узле рукоятки и выполнен с возможностью подачи шарнирно поворотных перемещений на шарнирное сочленение, что заставляет дистальную часть сочленения перемещаться относительно проксимальной части сочленения. Хирургический концевой эффектор функционально соединен с узлом удлиненного ствола и предназначен для проведения хирургического вмешательства при приложении к нему по меньшей мере одного пускового перемещения. Пусковой двигатель поддерживается в узле рукоятки и выполнен с возможностью приложения пусковых перемещений на часть узла удлиненного ствола с целью передачи к хирургическому концевому эффектору. Хирургический инструмент дополнительно включает джойстиковый управляющий узел, который содержит первый узел переключателей, поддерживаемый в узле рукоятки с возможностью перемещения, и включает джойстик, установленный на нем с возможностью перемещения таким образом, что вращательное перемещение джойстика относительно первого узла переключателей приводит к передаче по меньшей мере одного соответствующего контрольного сигнала к двигателю шарнира. Джойстиковый узел дополнительно включает второй узел переключателей, содержащий первый датчик и второй датчик, выполненные с возможностью перемещения вместе с первым узлом переключателей таким образом, что перемещение второго датчика относительно первого датчика приводит к передаче по меньшей мере одного иного контрольного сигнала к пусковому двигателю.
В соответствии с еще одной общей формой предложен хирургический инструмент для воздействия на ткань. Инструмент содержит по меньшей мере один процессор и функционально связанную с ним память, по меньшей мере один двигатель, связанный с процессором, и по меньшей мере одно активирующее устройство. Процессор запрограммирован на прием от съемной рабочей части первой переменной, описывающей съемный инструмент. Процессор также запрограммирован на использование первой переменной в алгоритме управления инструментом. Кроме того, процессор запрограммирован на прием входного контрольного сигнала от активирующего устройства и на управление по меньшей мере одним двигателем для работы хирургического инструмента в сочетании со съемным инструментом, согласно алгоритму управления инструментом с учетом входного контрольного сигнала.
В соответствии с дополнительной общей формой процессор можно запрограммировать на прием от съемного инструмента алгоритма управления инструментом, описывающего работу хирургического инструмента в сочетании со съемным инструментом. Процессор также можно запрограммировать на прием входного контрольного сигнала от активирующего устройства и на управление по меньшей мере одним двигателем для работы хирургического инструмента в сочетании со съемным инструментом, согласно алгоритму управления инструментом с учетом входного контрольного сигнала.
В соответствии с еще одной общей формой может быть описан хирургический инструмент, выполненный с возможностью ретрансляции сигнала низкой мощности от концевого эффектора к удаленному устройству. Хирургический инструмент может содержать рукоятку, ствол, направленный дистально от рукоятки, и концевой эффектор, прикрепленный к дистальному концу ствола. В концевом эффекторе может быть расположен датчик. Датчик может генерировать сигнал, отражающий состояние концевого эффектора. В концевом эффекторе может быть размещен передатчик. Передатчик может передавать от датчика сигнал первого уровня мощности. Сигнал может приниматься ретрансляционной станцией, размещенной в рукоятке хирургического инструмента. Ретрансляционная станция выполнена с возможностью усиления и ретрансляции сигнала со вторым уровнем мощности, причем второй уровень мощности выше первого уровня мощности.
В соответствии с дополнительной общей формой может быть описана ретрансляционная станция для ретрансляции сигнала от концевого эффектора хирургического инструмента к удаленному устройству. Ретрансляционная станция содержит приемник, выполненный с возможностью приема сигнала от датчика, расположенного в концевом эффекторе. Сигнал передается с первым уровнем мощности. Ретрансляционная станция дополнительно содержит усилитель, выполненный с возможностью усиления сигнала до второго уровня мощности. Передатчик выполнен с возможностью передачи сигнала со вторым уровнем мощности. Второй уровень мощности выше, чем первый уровень мощности.
В соответствии с общей формой может быть описан способ ретрансляции сигнала, принятого от модуля анализа в концевом эффекторе. Способ включает генерацию посредством датчика сигнала, отражающего состояние хирургического концевого эффектора. Датчик размещен в концевом эффекторе. Способ дополнительно включает передачу посредством передатчика первого сигнала с первым уровнем мощности и прием переданного сигнала посредством приемника на ретрансляционной станции. Первый сигнал усиливается ретрансляционной станцией с использованием усилителя до сигнала высокой мощности, имеющего второй уровень мощности. Второй уровень мощности выше, чем первый уровень мощности. Сигнал высокой мощности передается ретрансляционной станцией со вторым уровнем мощности. Сигнал высокой мощности принимается удаленным устройством, таким как видеомонитор. Видеомонитор выводит графическое представление состояния хирургического концевого эффектора.
Некоторые части описанного выше представлены в виде способов и символических представлений операций с битами данных внутри компьютерной памяти. Эти описания и представления являются средствами, которые специалисты в данной области используют, чтобы наиболее эффективно донести суть своей работы другим специалистам в данной области. В данном случае и по существу под способом понимается самостоятельная последовательность действий (команд), приводящая к желаемому результату. Под действиями понимаются такие, которые требуют выполнения физических манипуляций с физическими величинами. Как правило, хотя и не обязательно, эти величины принимают форму электрических, магнитных или оптических сигналов, которые можно хранить, передавать, комбинировать, сравнивать и распоряжаться иным образом. Иногда, в основном по причине широкого использования, удобно называть эти сигналы битами, значениями, элементами, символами, буквами, терминами, числами и т. п. Кроме того, также иногда бывает удобно называть некоторые конфигурации действий, требующих физических манипуляций с физическими величинами, модулями или кодовыми устройствами, без потери степени обобщения.
Некоторые аспекты настоящего изобретения включают стадии процесса и команды, описанные в настоящем документе, в форме способа. Следует отметить, что стадии процесса и команды настоящего изобретения можно воплотить в виде программного обеспечения, встроенных программ или аппаратного обеспечения, а при воплощении в виде программного обеспечения их можно загружать для установки и работы с ними на разных платформах с применением разнообразных операционных систем.
Настоящее изобретение также относится к устройству для выполнения описанных в настоящем документе операций. Это устройство может быть специально создано для требуемых целей, либо оно может представлять собой компьютер общего назначения, избирательно активированный или перенастроенный с помощью компьютерной программы, которая хранится в компьютере. Такая компьютерная программа может храниться на предназначенных для чтения компьютером носителях, таких как (без ограничений) диски любого типа, включая гибкие диски, оптические диски, диски CD-ROM, магнитооптические диски, постоянные запоминающие устройства (ПЗУ), оперативные запоминающие устройства (ОЗУ), EPROM, EEPROM магнитные или оптические карты, специализированные интегральные схемы (ASIC) или любые типы носителей, подходящие для хранения электронных команд и соединенные каждая с системной шиной компьютера. Кроме того, компьютеры и компьютерные системы, упоминаемые в данном описании, могут включать один процессор или могут быть конфигурациями на основе многопроцессорных схем для увеличения вычислительной мощности.
Способы и отображения, представленные в настоящем документе, не связаны по своей сути с каким-либо конкретным компьютером или другим устройством. Также можно использовать различные системы общего назначения с программами, соответствующими идеям, изложенным в настоящем документе, либо может оказаться удобным сконструировать более специализированное устройство для выполнения требуемых способом действий. Требуемая структура для различных подобных систем будет очевидна из вышеизложенного описания. Кроме этого, настоящее изобретение не описано применительно к какому-либо конкретному языку программирования. Следует понимать, что для реализации идей настоящего изобретения можно использовать различные языки программирования, как описано в настоящем документе, и любые упомянутые выше ссылки на конкретные языки программирования предложены для описания реализации и наилучшего режима использования настоящего изобретения.
В различных формах описывается хирургический инструмент, выполненный с возможностью ретрансляции сигнала низкой мощности от концевого эффектора к удаленному устройству. Хирургический инструмент может содержать рукоятку, ствол, направленный дистально от рукоятки, и концевой эффектор, прикрепленный к дистальному концу ствола. В концевом эффекторе может быть расположен датчик. Датчик может генерировать сигнал, отражающий состояние концевого эффектора. В концевом эффекторе может быть размещен передатчик. Передатчик может передавать от датчика сигнал первого уровня мощности. Сигнал может приниматься ретрансляционной станцией, размещенной в рукоятке хирургического инструмента. Ретрансляционная станция выполнена с возможностью усиления и ретрансляции сигнала со вторым уровнем мощности, причем второй уровень мощности выше первого уровня мощности.
В различных формах описывается ретрансляционная станция для ретрансляции сигнала от концевого эффектора хирургического инструмента к удаленному устройству. Ретрансляционная станция содержит приемник, выполненный с возможностью приема сигнала от датчика, расположенного в концевом эффекторе. Сигнал передается с первым уровнем мощности. Ретрансляционная станция дополнительно содержит усилитель, выполненный с возможностью усиления сигнала до второго уровня мощности. Передатчик выполнен с возможностью передачи сигнала со вторым уровнем мощности. Второй уровень мощности выше, чем первый уровень мощности.
В различных формах описывается способ ретрансляции сигнала, принятого от модуля анализа в концевом эффекторе. Способ включает генерацию посредством датчика сигнала, отражающего состояние хирургического концевого эффектора. Датчик размещен в концевом эффекторе. Способ дополнительно включает передачу посредством передатчика первого сигнала с первым уровнем мощности и прием переданного сигнала посредством приемника на ретрансляционной станции. Первый сигнал усиливается ретрансляционной станцией с использованием усилителя до сигнала высокой мощности, имеющего второй уровень мощности. Второй уровень мощности выше, чем первый уровень мощности. Сигнал высокой мощности передается ретрансляционной станцией со вторым уровнем мощности. Сигнал высокой мощности принимается удаленным устройством, таким как видеомонитор. Видеомонитор выводит графическое представление состояния хирургического концевого эффектора.
В различных формах описывается концевой эффектор, выпрямляемый при помощи датчика. Концевой эффектор, выпрямляемый при помощи датчика, может представлять собой концевой эффектор, соединенный со стволом шарнирным сочленением. Концевой эффектор может быть выполнен с возможностью шарнирного поворота под углом по отношению к стволу. Датчик может располагаться на концевом эффекторе, выпрямляемом при помощи датчика, например, на стволе или на концевом эффекторе. Датчик выполнен с возможностью обнаружения сильного проксимального перемещения хирургического инструмента. При обнаружении сильного проксимального перемещения датчик может генерировать сигнал, управляющий двигателем, для выпрямления концевого эффектора по отношению к стволу.
В различных формах описывается хирургический инструмент, содержащий концевой эффектор, выпрямляемый при помощи датчика. Хирургический инструмент может содержать рукоятку. Ствол может дистально проходить из рукоятки. Внутри рукоятки может располагаться двигатель для управления шарнирным поворотом хирургического инструмента. Шарнирный концевой эффектор расположен на дистальном конце ствола. Датчик может располагаться в рукоятке, на стволе или на концевом эффекторе. Датчик может быть выполнен с возможностью обнаружения сильного проксимального перемещения хирургического инструмента. Когда датчик обнаруживает сильное проксимальное перемещение, он может активировать приводный процесс выпрямления, заставляя двигатель выпрямить шарнирно повернутый концевой эффектор. В некоторых формах множество датчиков могут обеспечивать дополнительные проверки процесса выпрямления.
В различных формах описывается способ работы с хирургическим инструментом, содержащим концевой эффектор, выпрямляемый с помощью датчика. Способ может включать обнаружение при помощи первого датчика проксимального перемещения хирургического инструмента. Первый датчик может быть размещен в любой подходящей части хирургического инструмента, например, в рукоятке, стволе или концевом эффекторе. Первый датчик может представлять собой акселерометр, магнитный датчик или любой другой подходящий тип датчика. Датчик может генерировать сигнал, указывающий обнаружение сильного проксимального перемещения. Способ может дополнительно включать прием двигателем генерированного сигнала от первого датчика. Двигатель может распрямлять угол шарнирного поворота управляемого двигателем шарнирного концевого эффектора в результате приема сигнала. Второй датчик может генерировать второй сигнал для обеспечения дополнительной проверки.
В различных формах настоящее описание относится к хирургическому инструменту, оснащенному двигателями и содержащему модульную платформу управления двигателем. Главный контроллер может выполнять главный управляющий процесс для управления одной или более операциями хирургического инструмента. Первый контроллер двигателя и второй контроллер двигателя могут быть функционально соединены с главным контроллером. С первым контроллером двигателя может быть связан первый двигатель, а со вторым контроллером двигателя может быть связан второй двигатель. Главный управляющий процесс может генерировать контрольные сигналы для первого и второго контроллеров двигателя. Первый и второй контроллеры двигателя могут управлять первым и вторым двигателями в результате контрольных сигналов. В некоторых формах модульная система управления двигателем может содержать ведомый контроллер, выполненный с возможностью управления одним или более контроллерами двигателя на основании одного или более контрольных сигналов, принятых ведомым контроллером от главного контроллера.
В различных формах модульная система управления двигателем может содержать один или более контроллеров двигателя, с каждым из которых связан двигатель. Один или более контроллеров двигателя могут обмениваться данными с главным контроллером. Главный контроллер может быть выполнен с возможностью подачи контрольных сигналов контроллерам двигателя в ходе главного управляющего процесса. Контроллеры двигателя могут управлять связанными с ними двигателями в результате принятых контрольных сигналов. В некоторых формах один или более контроллеров двигателя и связанные с ними двигатели могут размещаться внутри рукоятки, выполненной с возможностью приема модульного ствола, модульного концевого эффектора и модульного источника питания. Рукоятка может обеспечивать взаимодействие между двигателями и модульным стволом и концевым эффектором.
В различных формах хирургический инструмент может содержать систему модульного управления двигателем. Хирургический инструмент может содержать главный контроллер. Хирургический инструмент может быть выполнен с возможностью приема модульных хирургических компонентов, таких как модульный ствол и рабочая часть. В хирургическом инструменте могут располагаться один или более двигателей и связанных с ними контроллеров двигателя, установленных в нем. Контроллеры двигателя могут быть функционально соединены с двигателями. Двигатели могут быть выполнены с возможностью управления одним или более перемещениями прикрепленного ствола или рабочей части. Главный контроллер и контроллеры двигателя могут находиться в электрической связи. Главный контроллер может быть выполнен с возможностью подачи одного или более контрольных сигналов контроллерам двигателя в ходе главного управляющего процесса. Контроллеры двигателя могут управлять двигателями в результате принятых управляющих сигналов.
В различных формах описывается способ управления хирургическим инструментом с приводом. Способ может включать генерацию главным контроллером одного или более контрольных сигналов. Первый контрольный сигнал может передаваться первому контроллеру двигателя, выполненному с возможностью управления первым двигателем. Первый контроллер двигателя может управлять первым двигателем в результате первого контрольного сигнала, принятого от главного контроллера. Второй контрольный сигнал может передаваться второму контроллеру двигателя, выполненному с возможностью управления вторым двигателем. Второй контроллер двигателя может управлять вторым двигателем в результате второго управляющего сигнала, принятого от главного контроллера. В некоторых формах второй контрольный сигнал может генерироваться ведомым контроллером.
В соответствии с одной общей формой предложен хирургический инструмент, содержащий приводной двигатель и приводной элемент, выполненный с возможностью перемещения приводным двигателем по такту выталкивания между исходным положением и положением конца такта. Положение конца такта проходит между первым положением и вторым положением. Механический упор может располагаться в положении конца такта или вблизи от него и может быть выполнен с возможностью увеличения сопротивления перемещению приводного элемента по такту выталкивания от первого положения до второго положения. Механический упор может содержать амортизатор и гасящий элемент. Амортизатор может быть выполнен с возможностью перемещения из первого положения во второе положение и может быть выполнен с возможностью контакта с приводным элементом в первом положении. Гасящий элемент может быть функционально соединен с амортизатором и может быть выполнен с возможностью увеличения сопротивления перемещению приводного элемента от первого положения ко второму положению. Гасящий элемент может быть выполнен с возможностью замедления приводного элемента, прежде чем приводной элемент переместится во второе положение. В одной форме гасящий элемент может быть выполнен с возможностью сжимания для нарастающего увеличения сопротивления перемещению приводного элемента между первым положением и вторым положением. Гасящий элемент может в одной форме содержать пружину. Амортизаторы могут иметь контактные поверхности, размер которых дополняет поверхность приводного элемента, контактирующую с ними в первом положении.
В одной форме управляющая система выполнена с возможностью обнаружения выброса тока, связанного с увеличением сопротивления перемещению приводного элемента. Управляющая система может отслеживать напряжение электропитания, подаваемого на приводной двигатель, с целью обнаружения выброса тока. Выброс тока может представлять собой заданный пороговый ток. Заданный пороговый ток может представлять собой по меньшей мере один заданный дифференциал порогового тока в течение по меньшей мере одного заданного периода времени. При обнаружении управляющей системой выброса тока подача электропитания на приводной двигатель может прерываться. В одной форме механический упор может дополнительно содержать твердый упор, который может предотвращать перемещение приводного элемента за пределы второго положения.
В соответствии с одной общей формой предложен механический упор для применения в хирургическом инструменте с целью генерации обнаруживаемого выброса тока, связанного с электромеханическим упором. Например, механический упор может располагаться в конце или вблизи от конца такта, связанного с тактом выталкивания приводного элемента. Положение конца такта может проходить между первым положением и вторым положением. Механический упор может содержать один или более амортизаторов и один или более гасящих элементов. Амортизаторы могут быть выполнены с возможностью перемещения из первого положения во второе положение и могут быть выполнены с возможностью контакта с приводным элементом в первом положении. Гасящие элементы могут быть функционально соединены с амортизаторами и могут быть выполнены с возможностью увеличения сопротивления перемещению приводного элемента от первого положения ко второму положению с целью генерации выброса тока. Гасящие элементы могут быть выполнены с возможностью замедления приводного элемента, прежде чем приводной элемент переместится во второе положение. Один или более гасящих элементов могут быть выполнены с возможностью сжимания для нарастающего увеличения сопротивления перемещению приводного элемента между первым положением и вторым положением. Один или более гасящих элементов также могут быть выполнены с возможностью сжатия и могут содержать по меньшей мере одну пружину. Амортизаторы могут иметь контактные поверхности, размер которых дополняет поверхность приводного элемента, контактирующую с ними в первом положении. Выброс тока, связанный с повышенным сопротивлением, может обнаруживаться управляющей системой, связанной с электромеханическим хирургическим инструментом. Управляющая система может быть выполнена с возможностью отслеживания напряжения, связанного с подачей электропитания на приводной двигатель, и прерывания подачи электропитания на приводной двигатель, когда выброс тока содержит по меньшей мере один заданный пороговый ток. По меньшей мере один пороговый ток может представлять собой дифференциал тока в течение по меньшей мере одного заданного периода времени. В одной форме механический упор дополнительно содержит твердый упор для предотвращения перемещения приводного элемента за пределы второго положения.
Описываемые в настоящем документе устройства могут быть выполнены с возможностью утилизации после разового применения или могут быть выполнены с возможностью применения множество раз. Однако в любом случае устройство можно восстановить для повторного применения после по меньшей мере одного применения. Восстановление может включать любую комбинацию стадий разборки устройства, с последующей очисткой или заменой конкретных частей, и дальнейшей сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно собрать вновь для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать самые разные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Предпочтительно описанный здесь предмет изобретения будет проходить обработку перед проведением хирургической операции. Сначала, после получения нового или уже использованного инструмента, его при необходимости очищают. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет Тайвек (TYVEK). Контейнер и инструмент затем помещают в поле излучения, которое способно проникнуть в контейнер, такое как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение убивает бактерии на инструменте и в контейнере. Стерилизованный инструмент может затем храниться в стерильном контейнере. Запечатанный контейнер сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Любой патент, публикация или другой материал описания, которые полностью или частично включены в настоящий документ путем ссылки, включены в настоящий документ в той степени, в которой они не противоречат определениям, положениям или другому материалу описания, представленным в настоящем документе. Таким образом, описание, ясно представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любым материалом, противоречащим положениям настоящего документа, который включен в настоящий документ путем ссылки. Любой материал (или его часть), указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Хотя в описании настоящего изобретения представлены примеры промышленных образцов, настоящее изобретение можно дополнительно модифицировать в рамках сущности и объема настоящего описания. Таким образом, предполагается, что настоящая заявка охватывает все вариации, способы применения или адаптации настоящего изобретения с применением его основных принципов. Предполагается, что настоящая заявка дополнительно охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области, к которой относится настоящее изобретение.
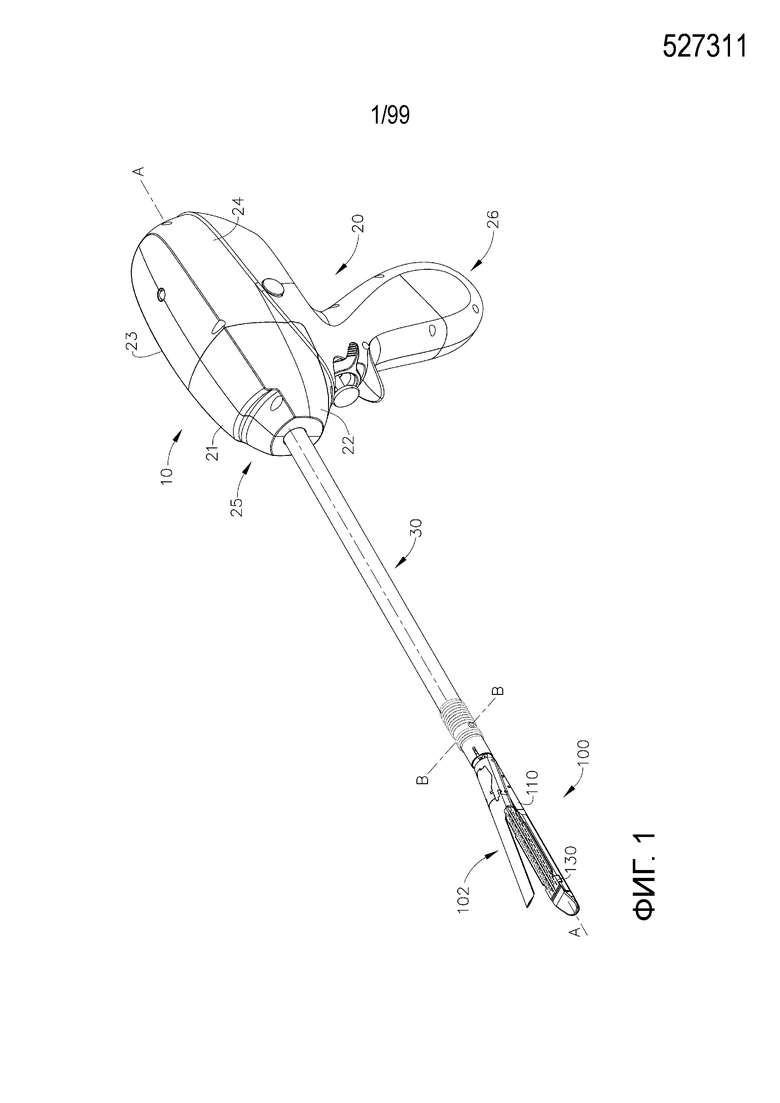
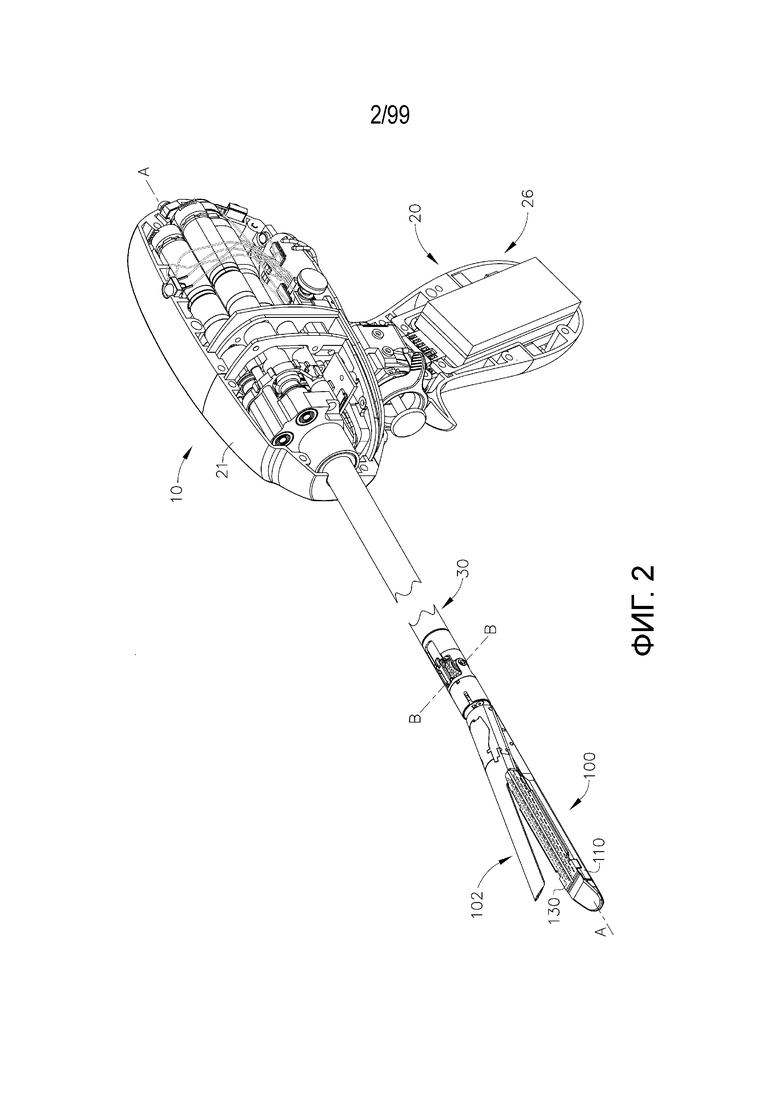
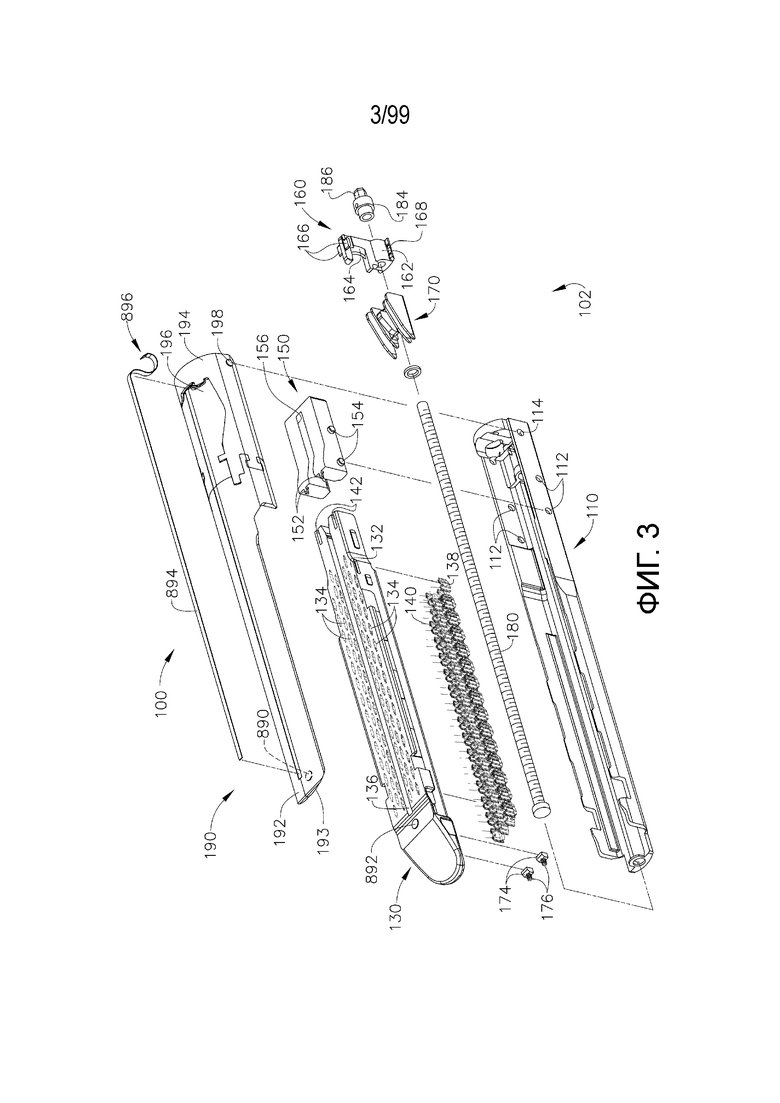
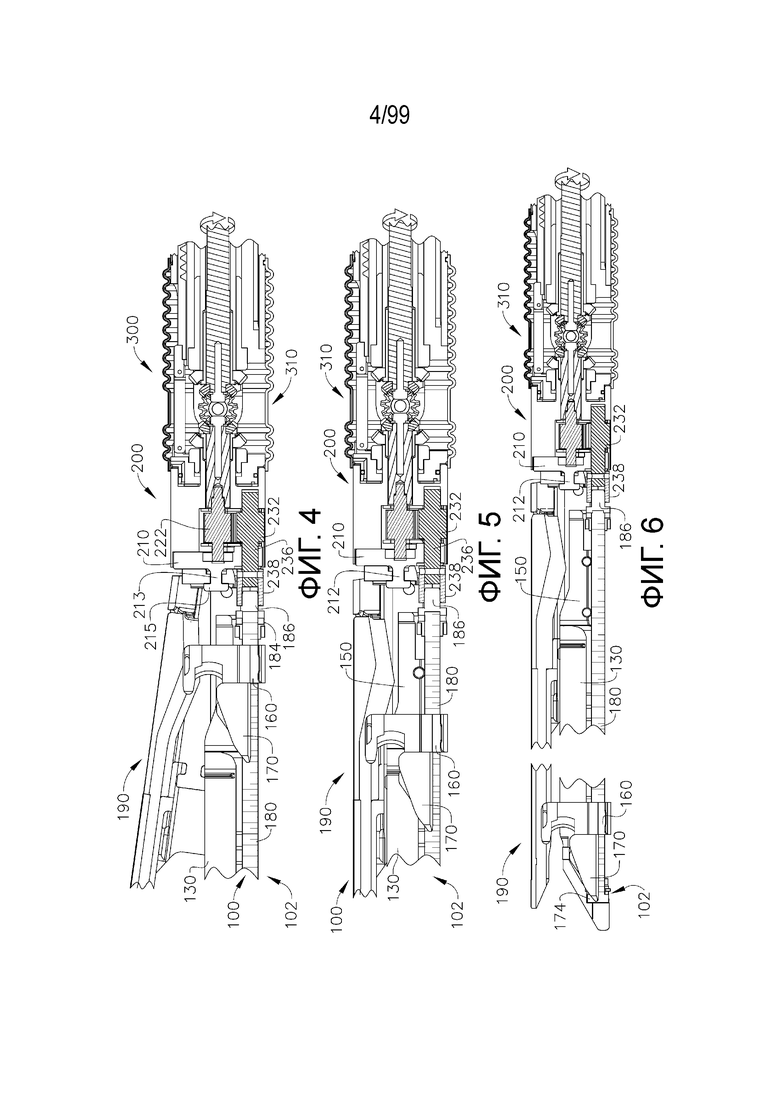
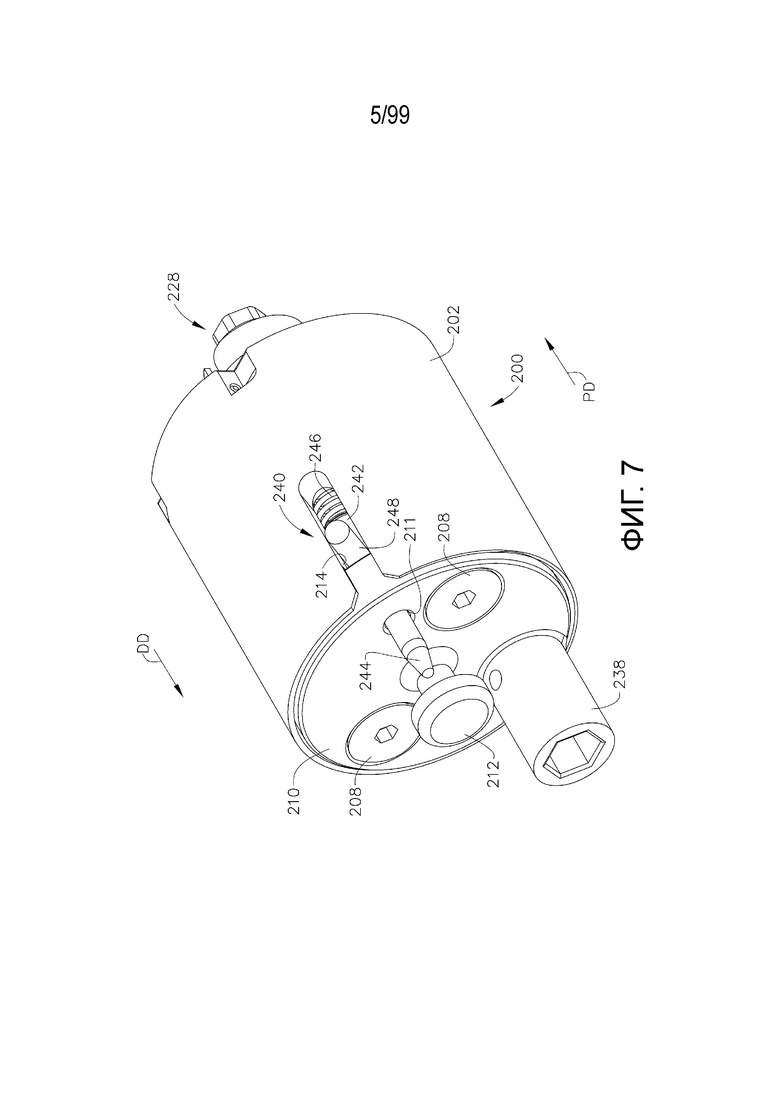
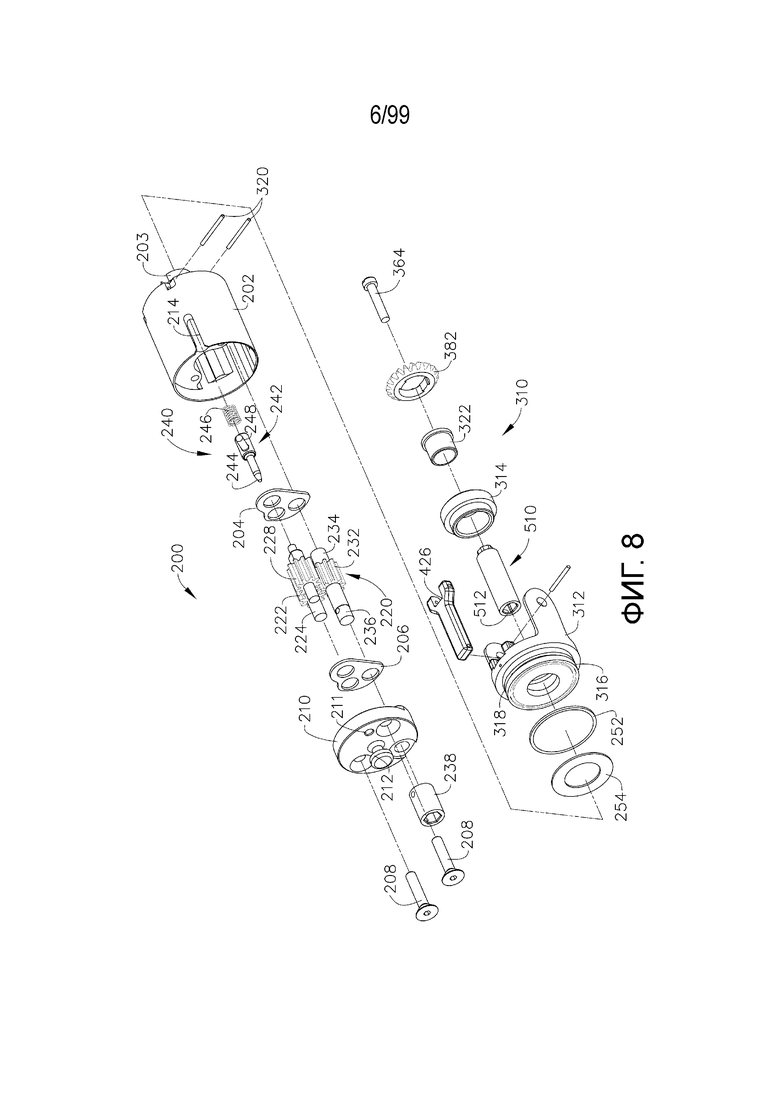
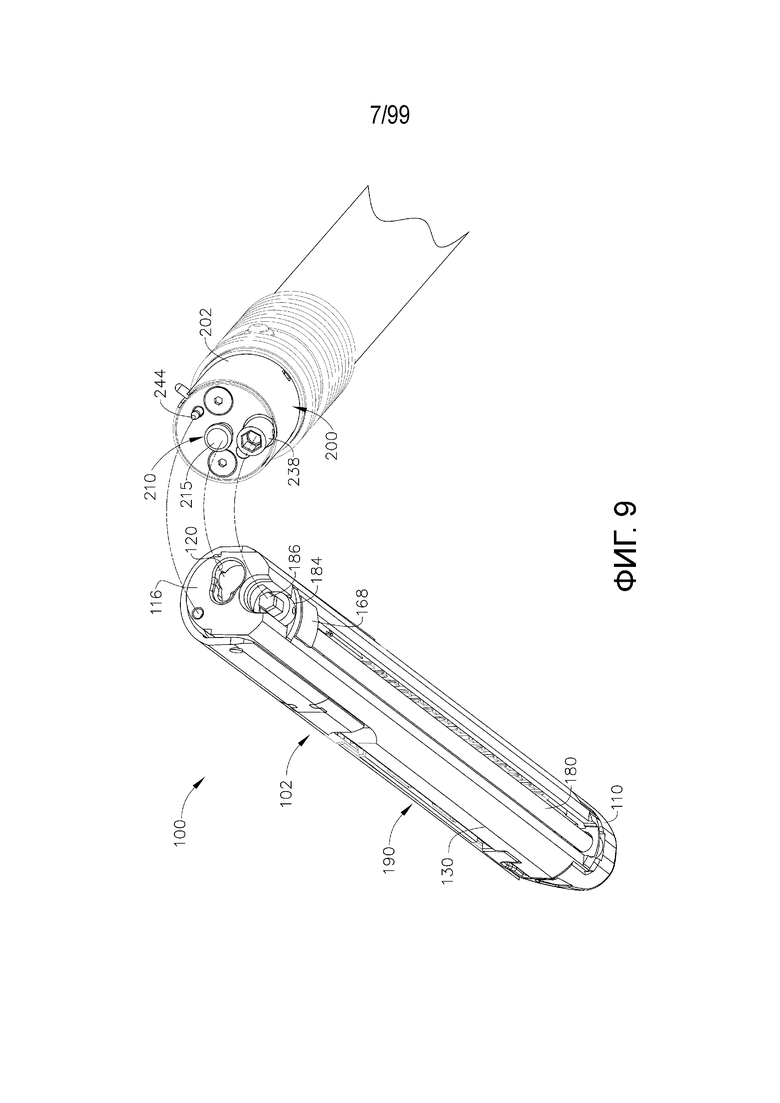
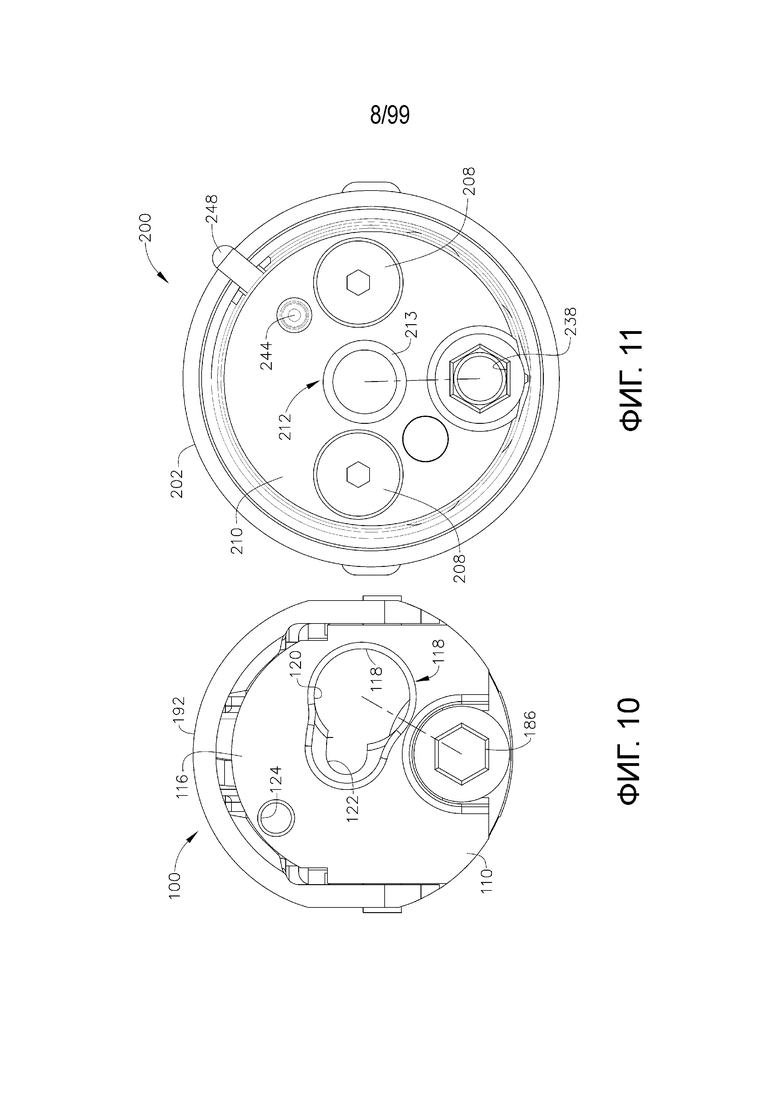
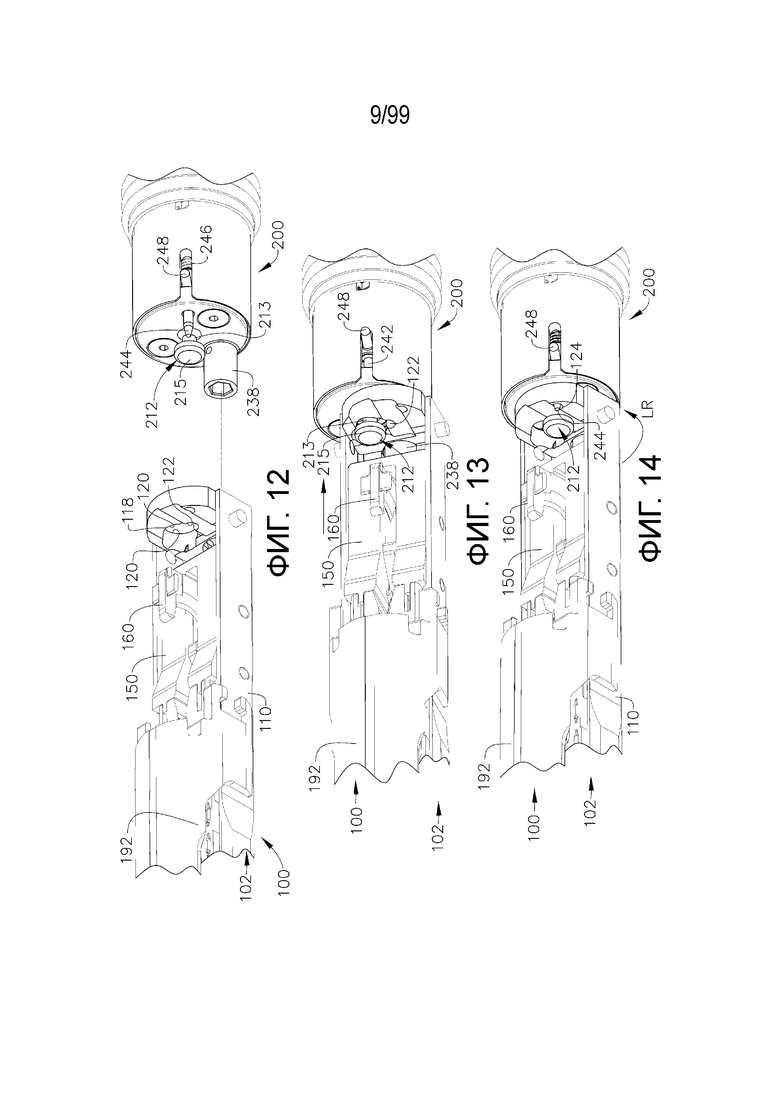
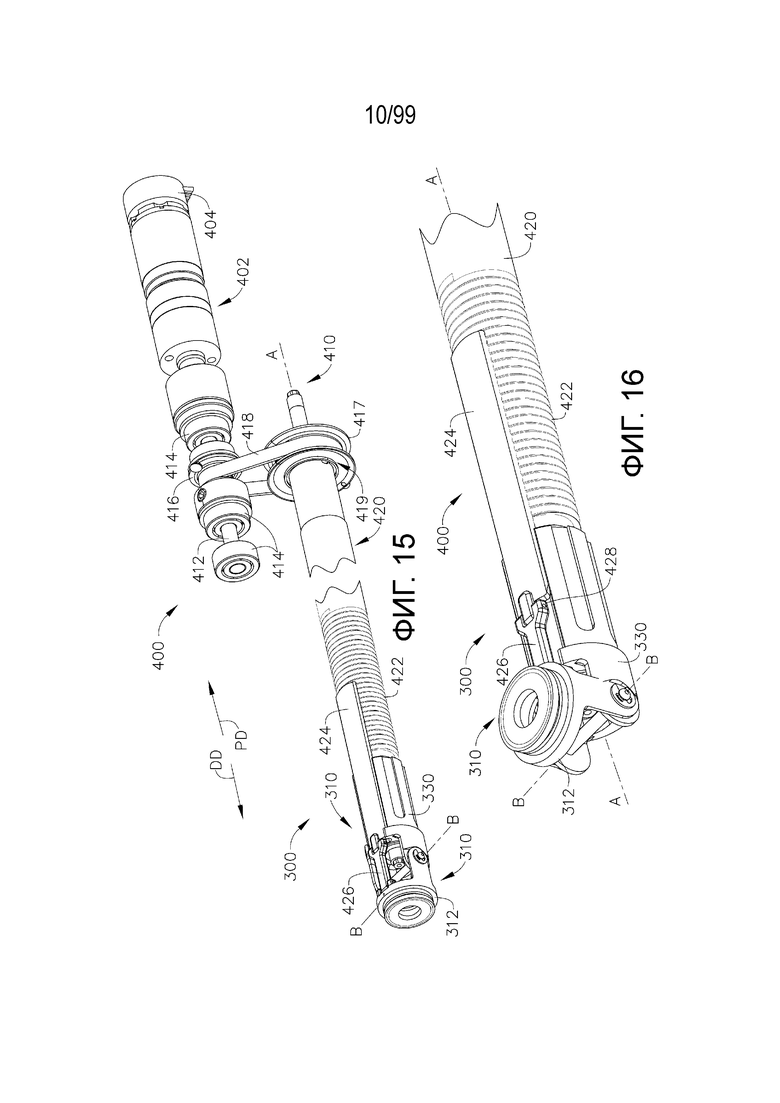
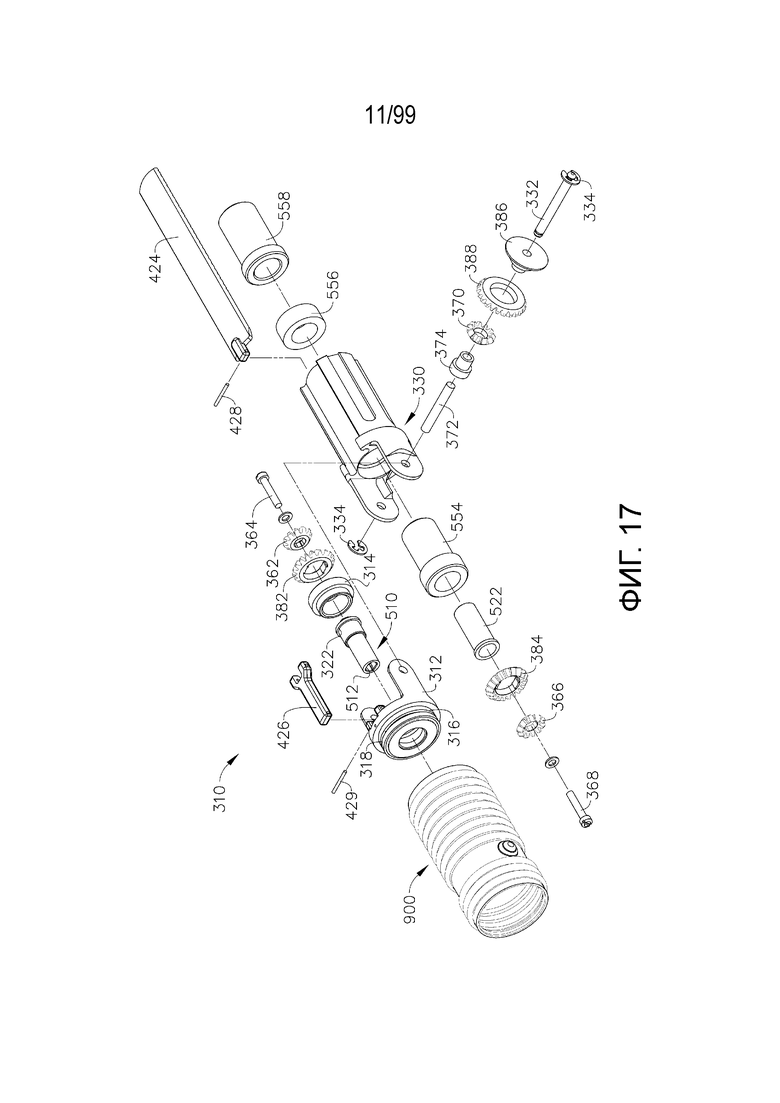
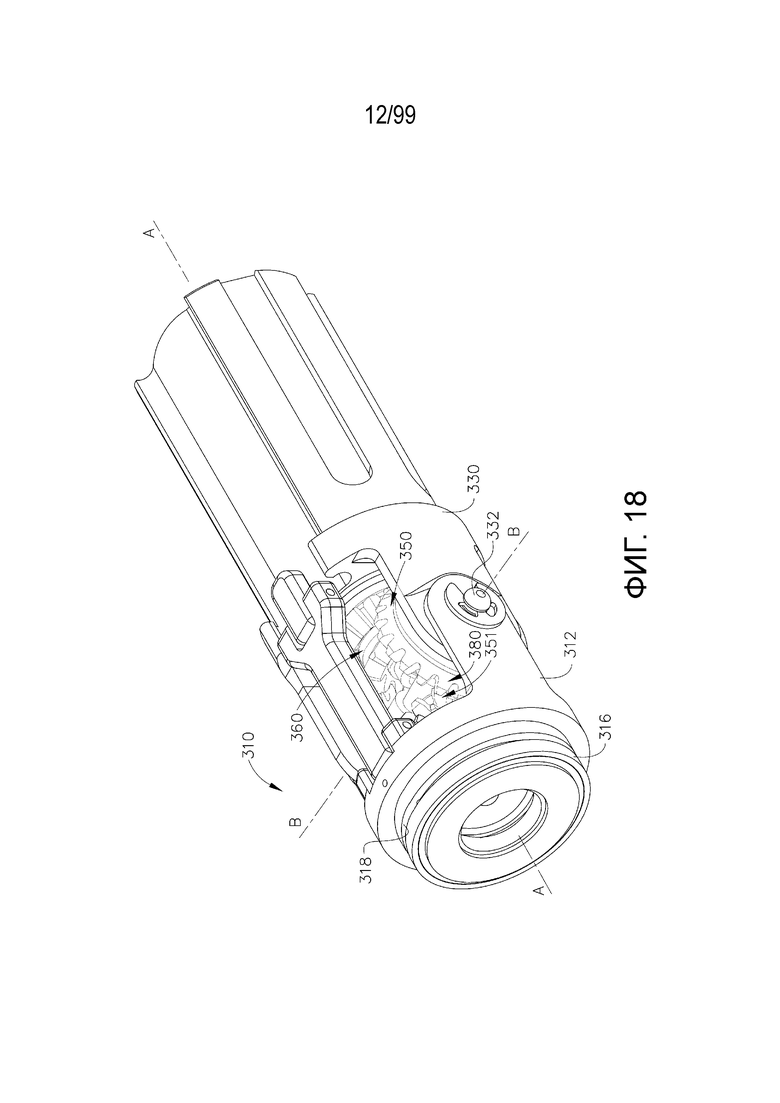
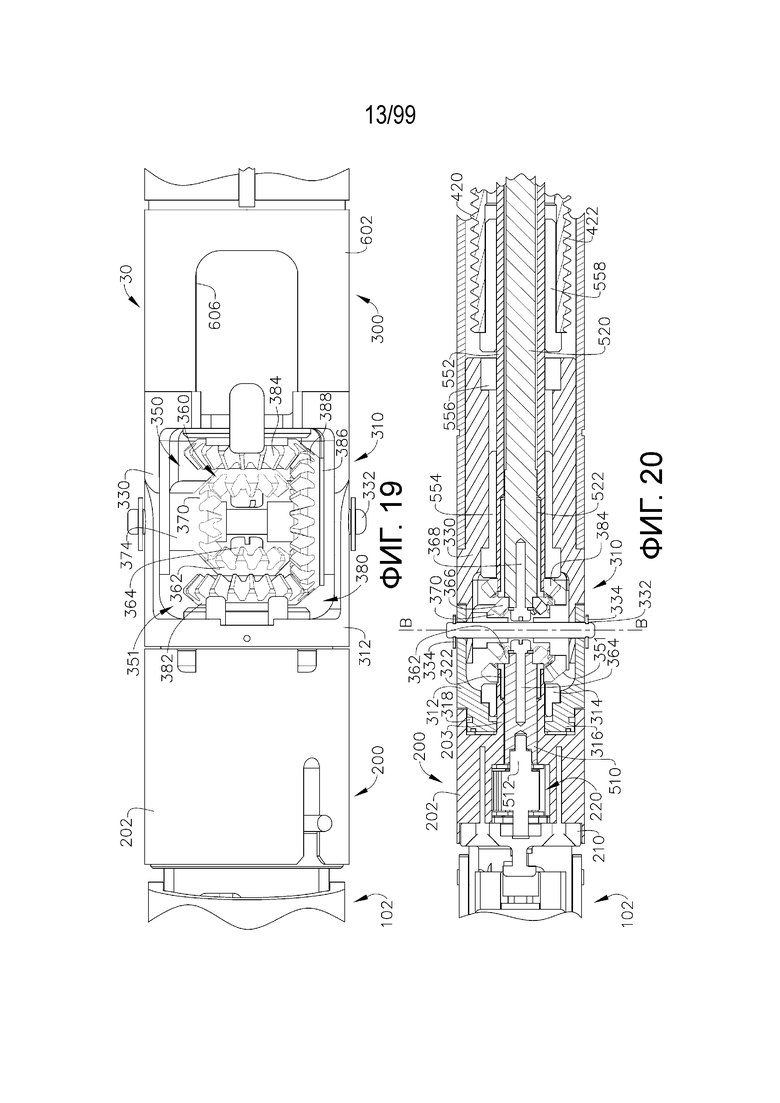
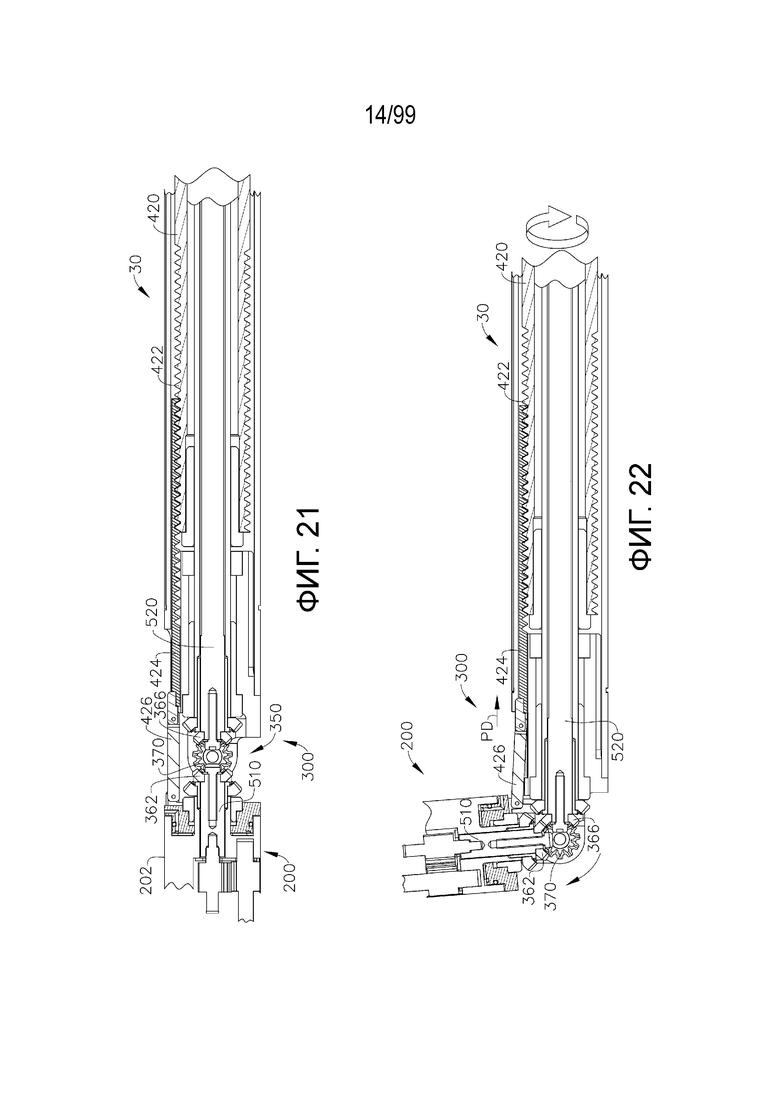
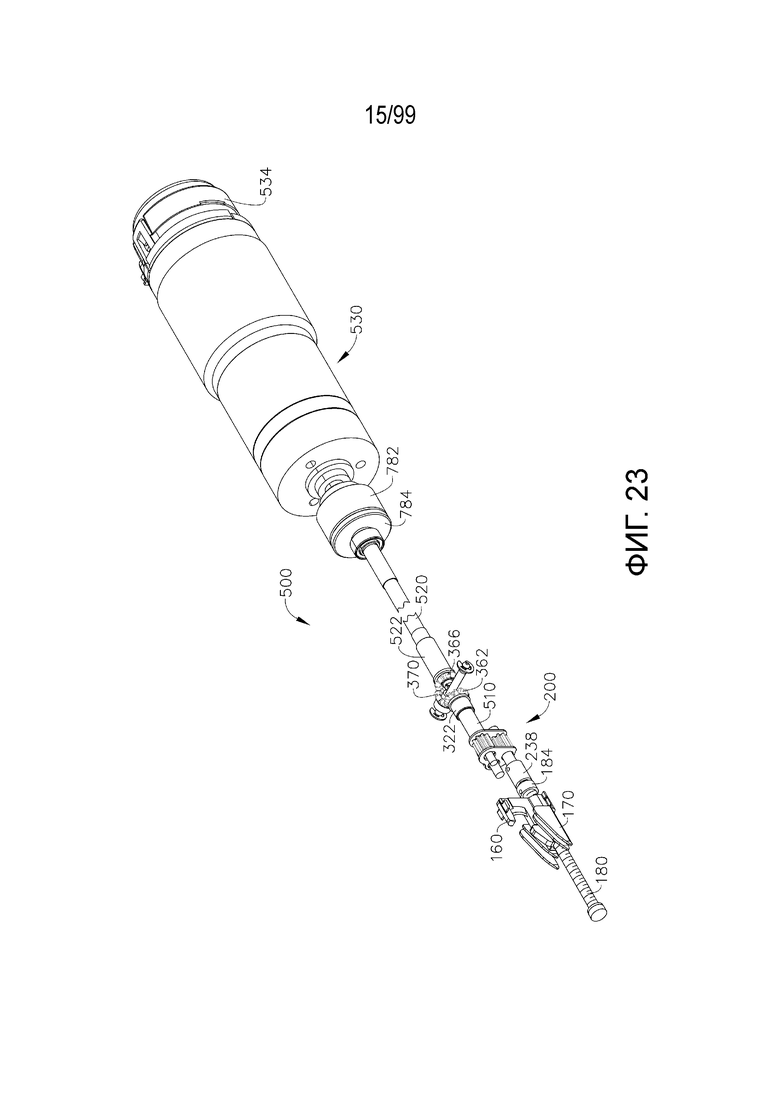
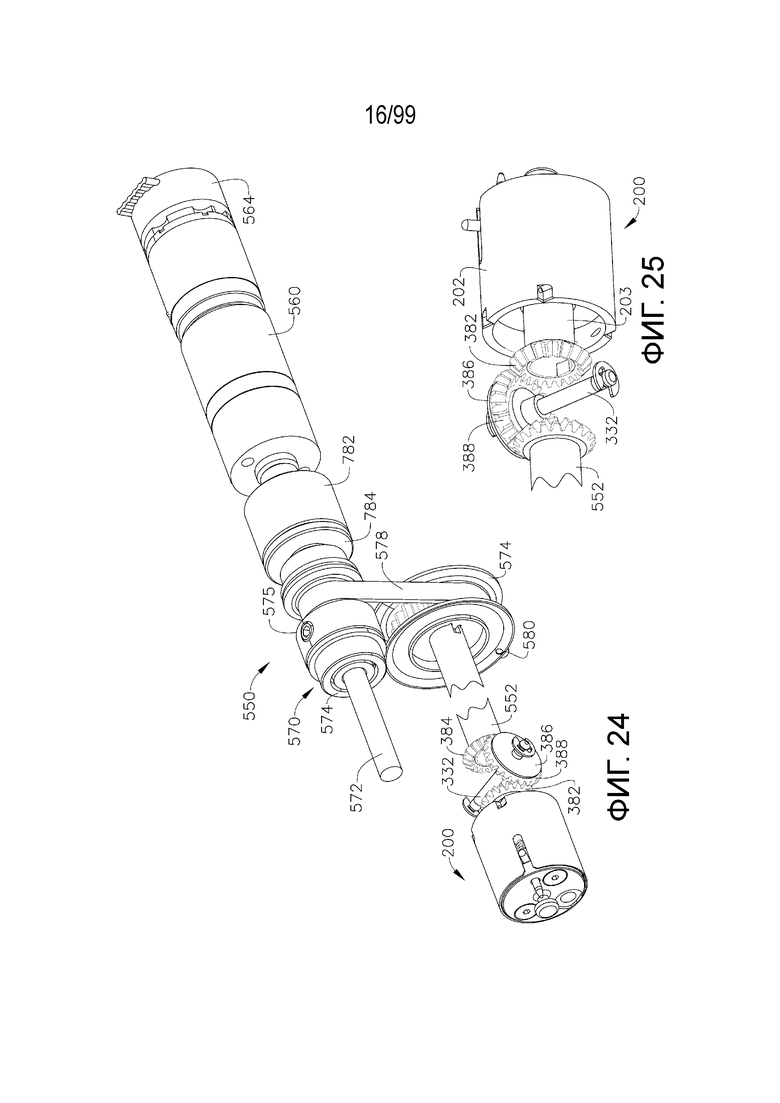
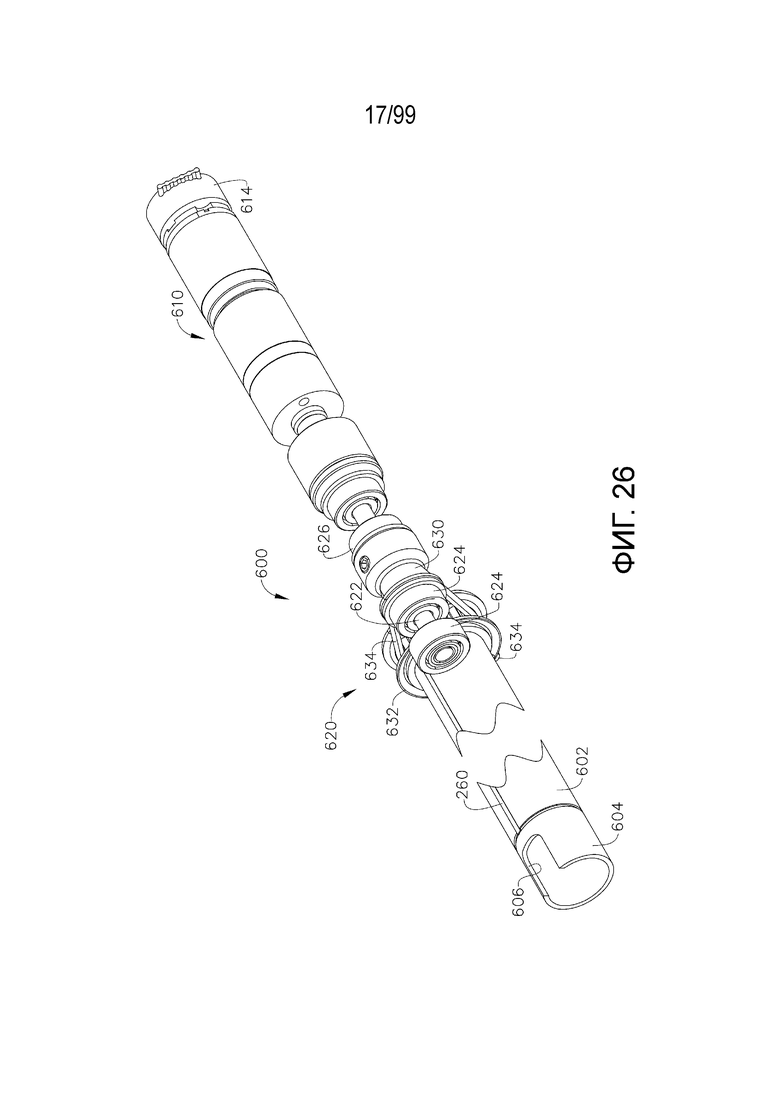
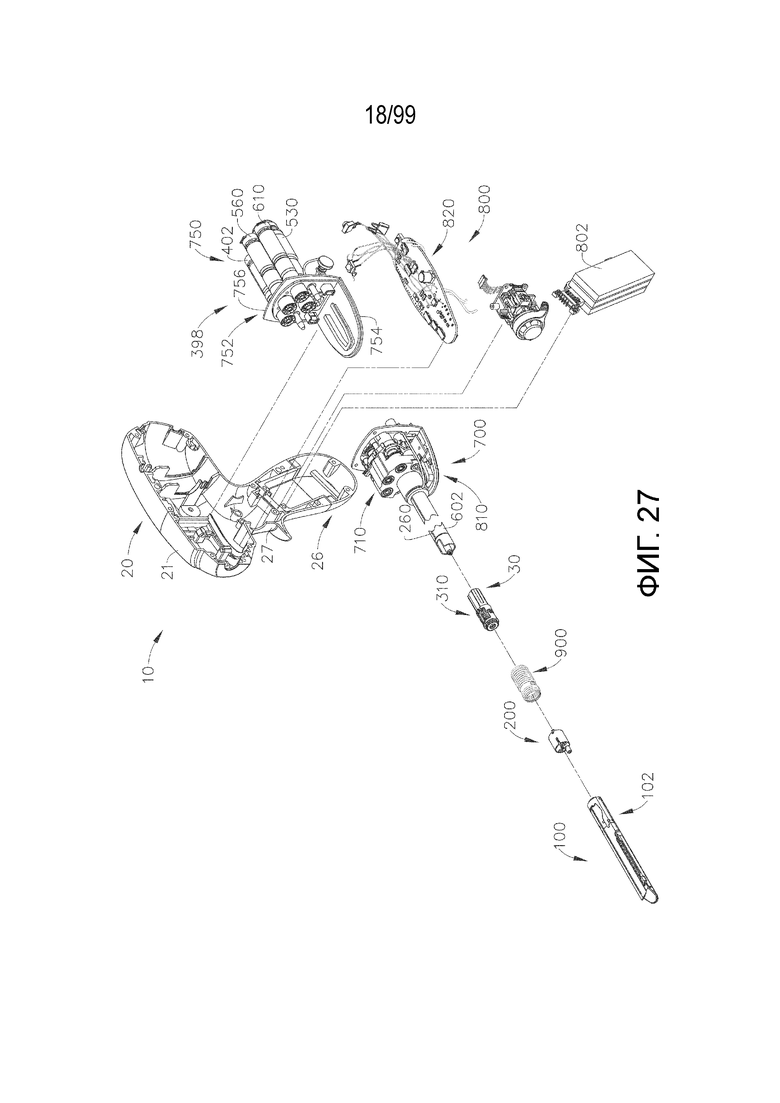
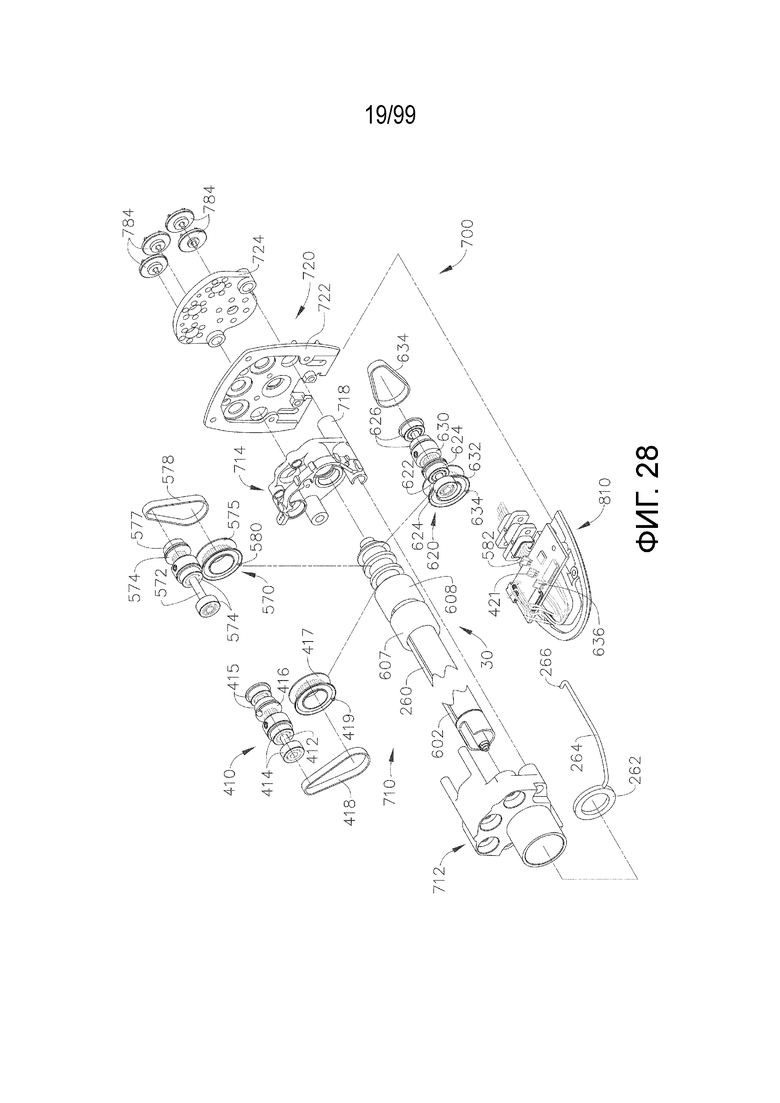
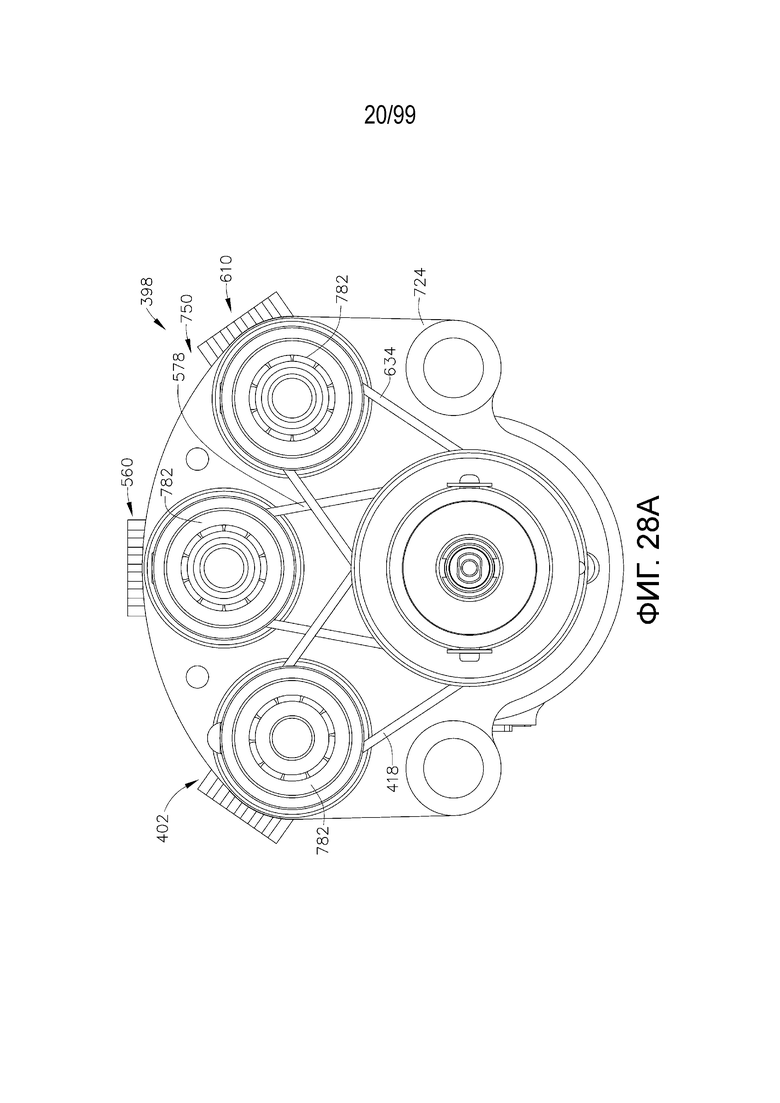
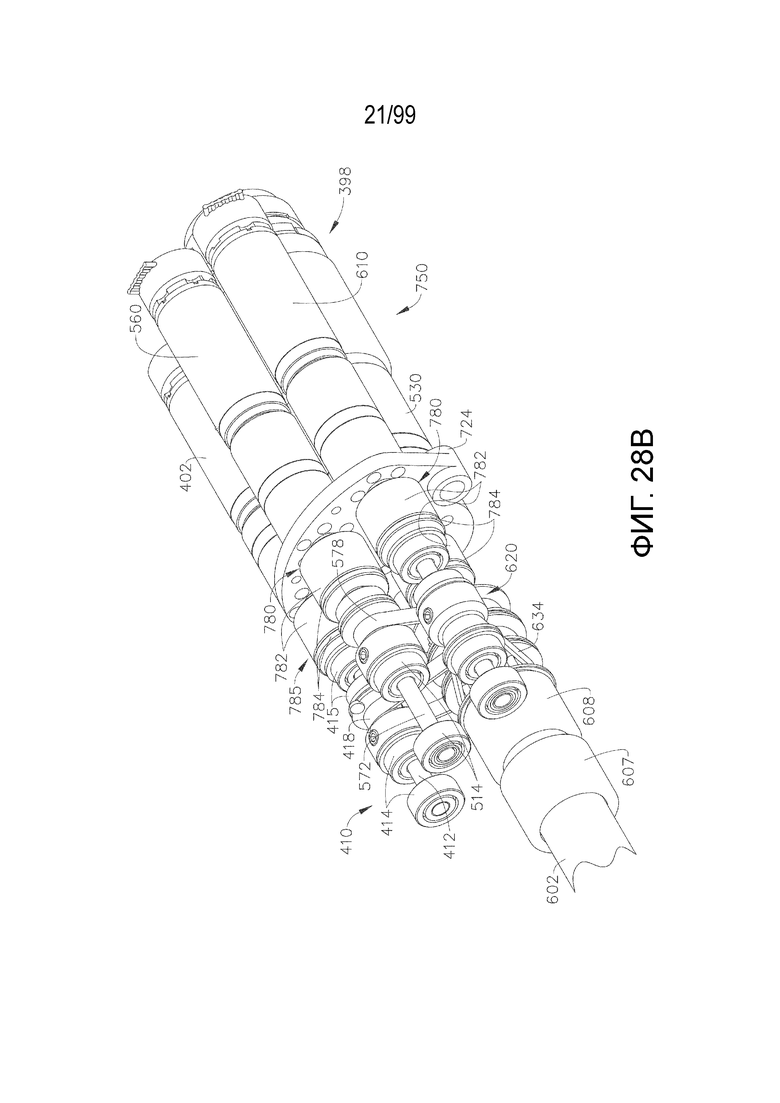
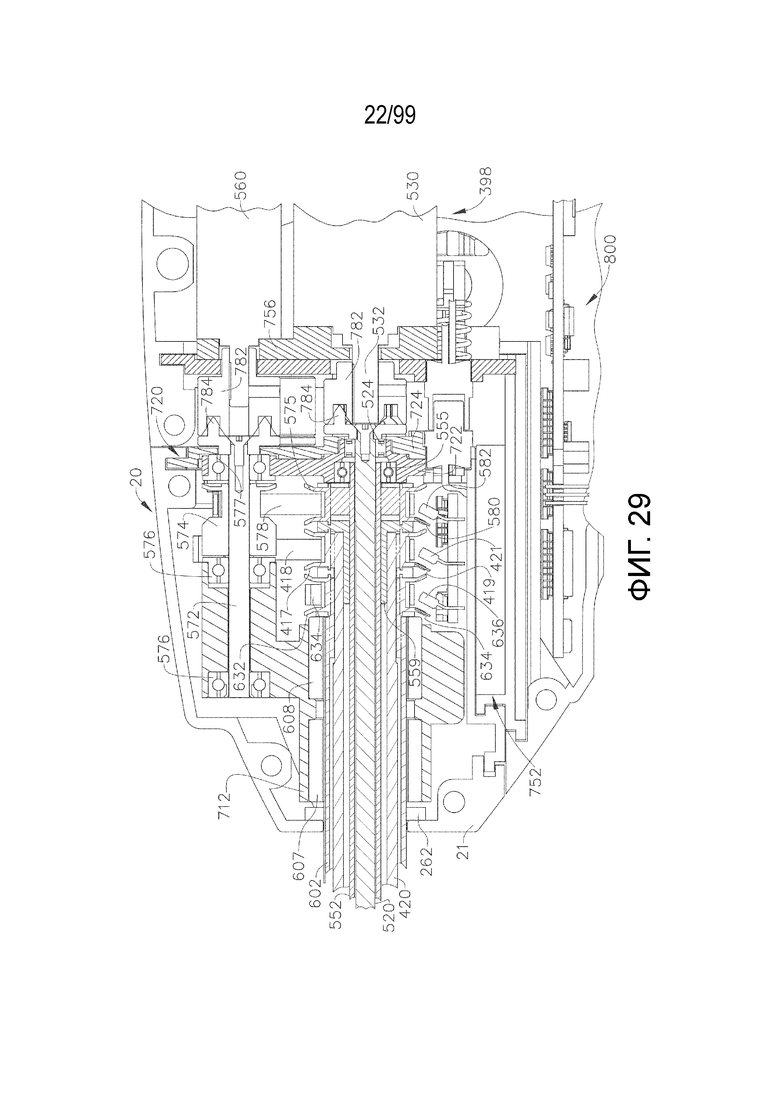
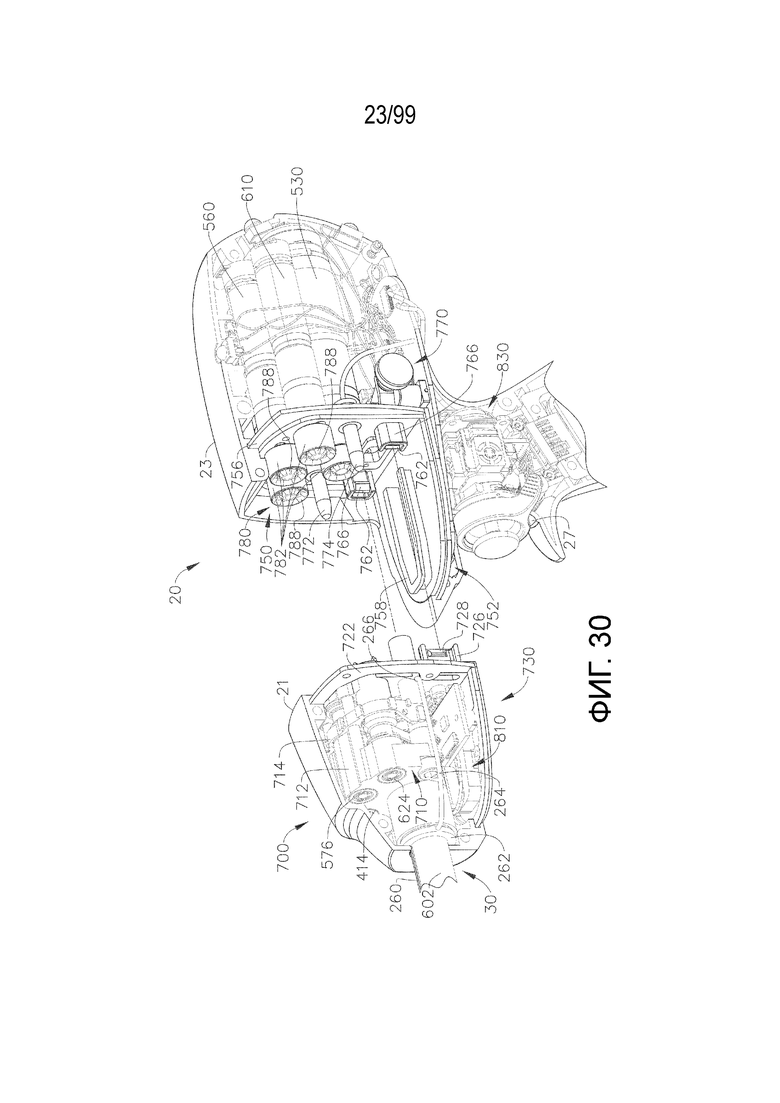
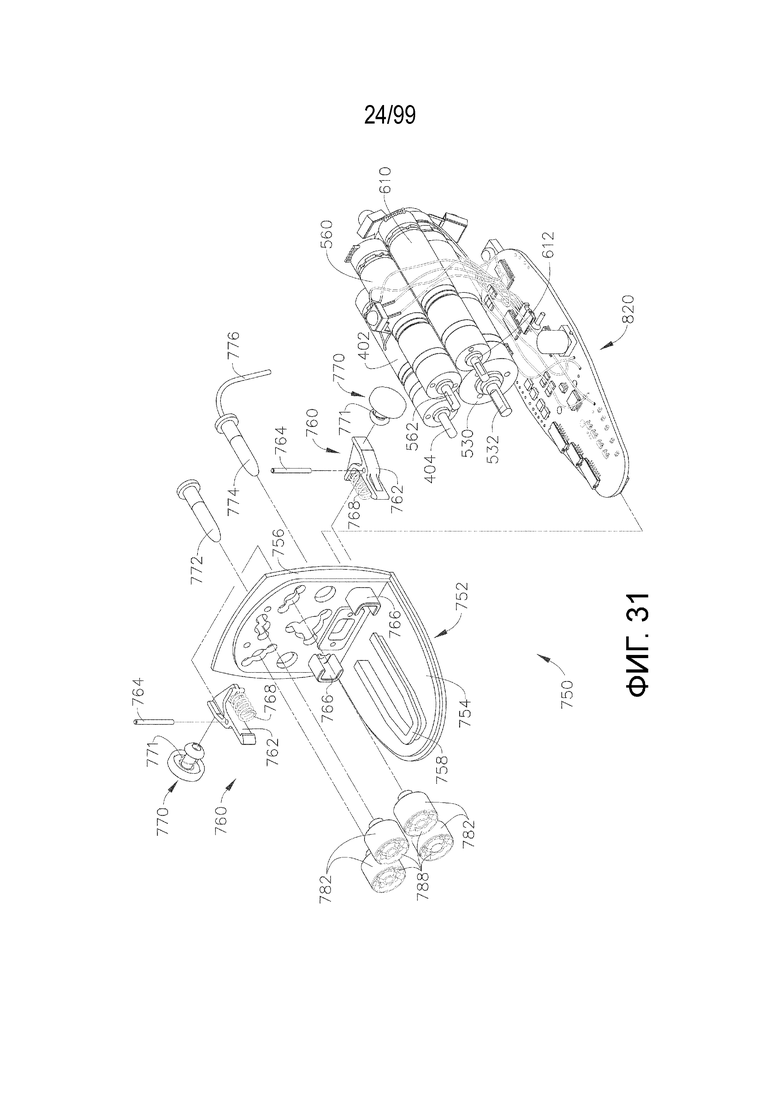
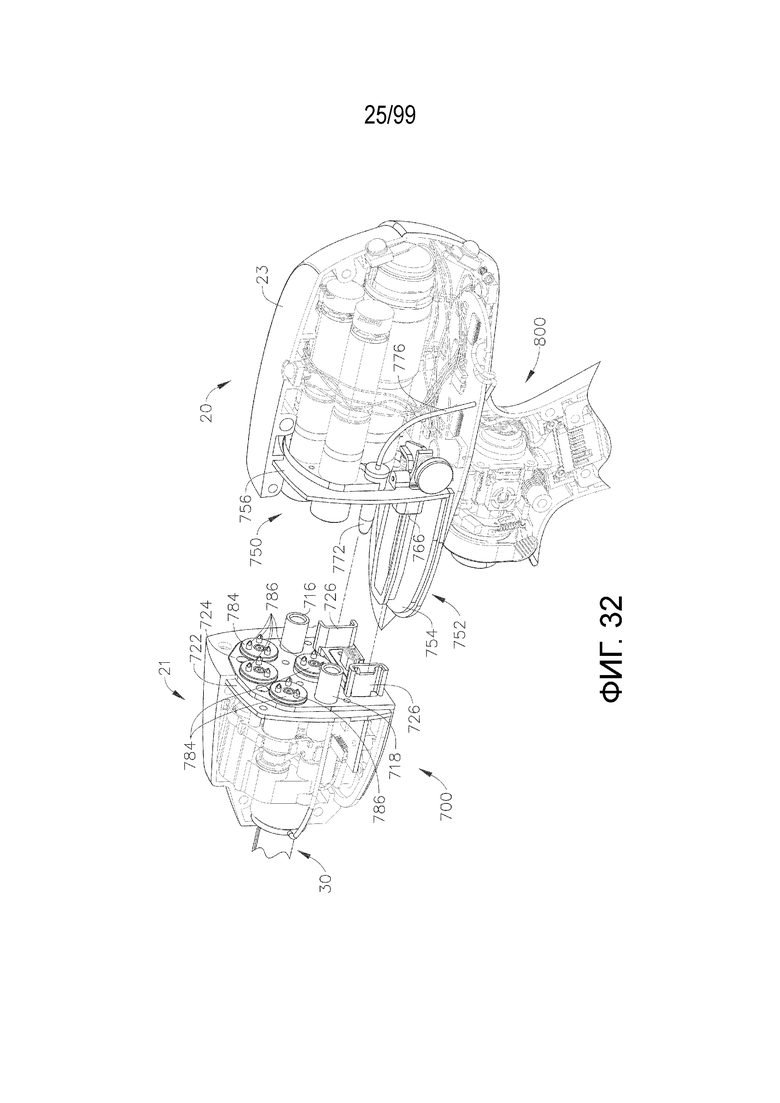
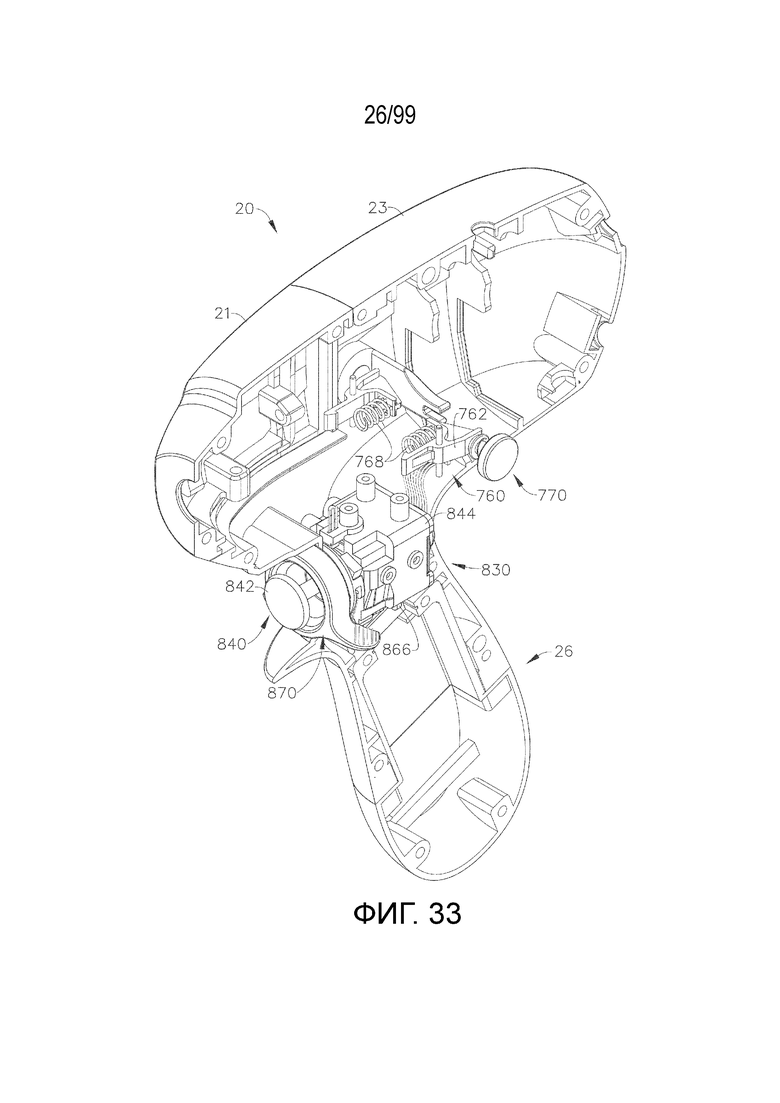
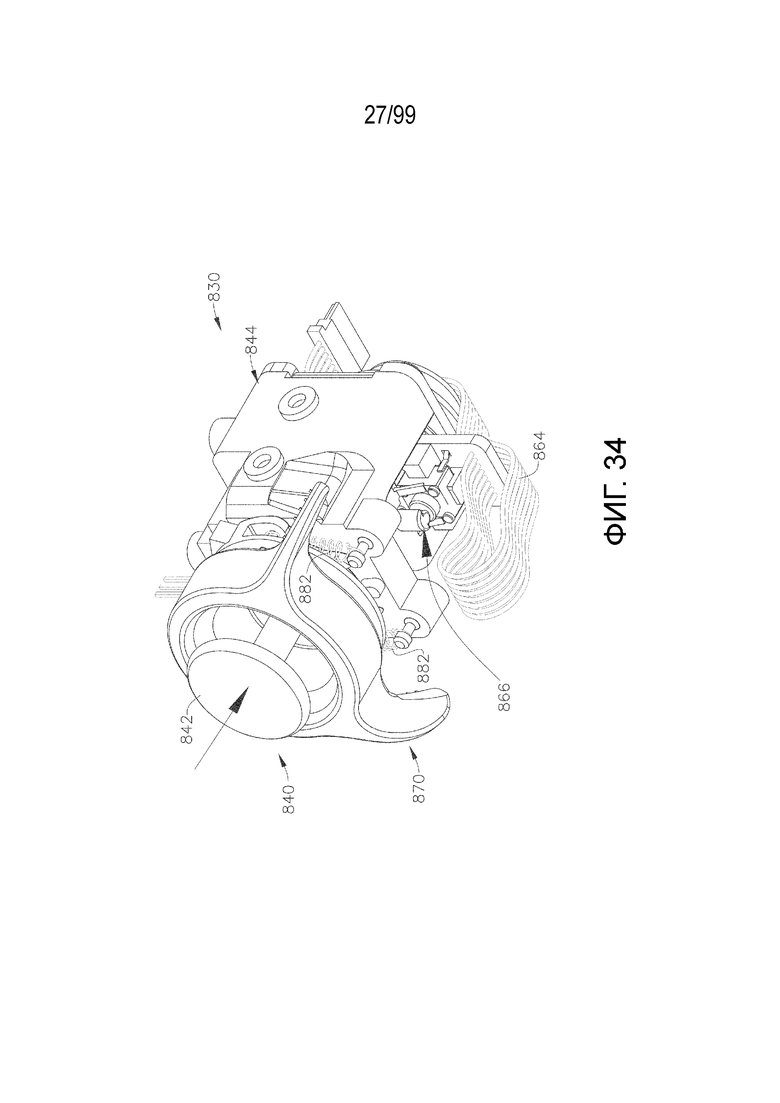
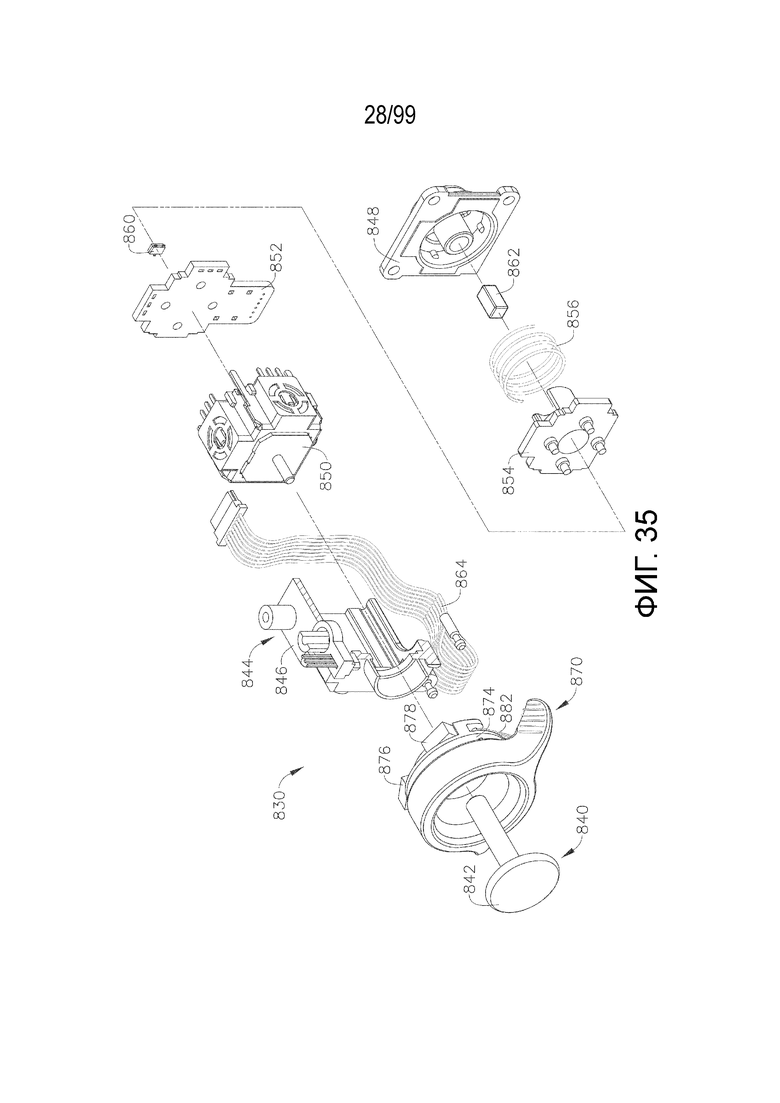
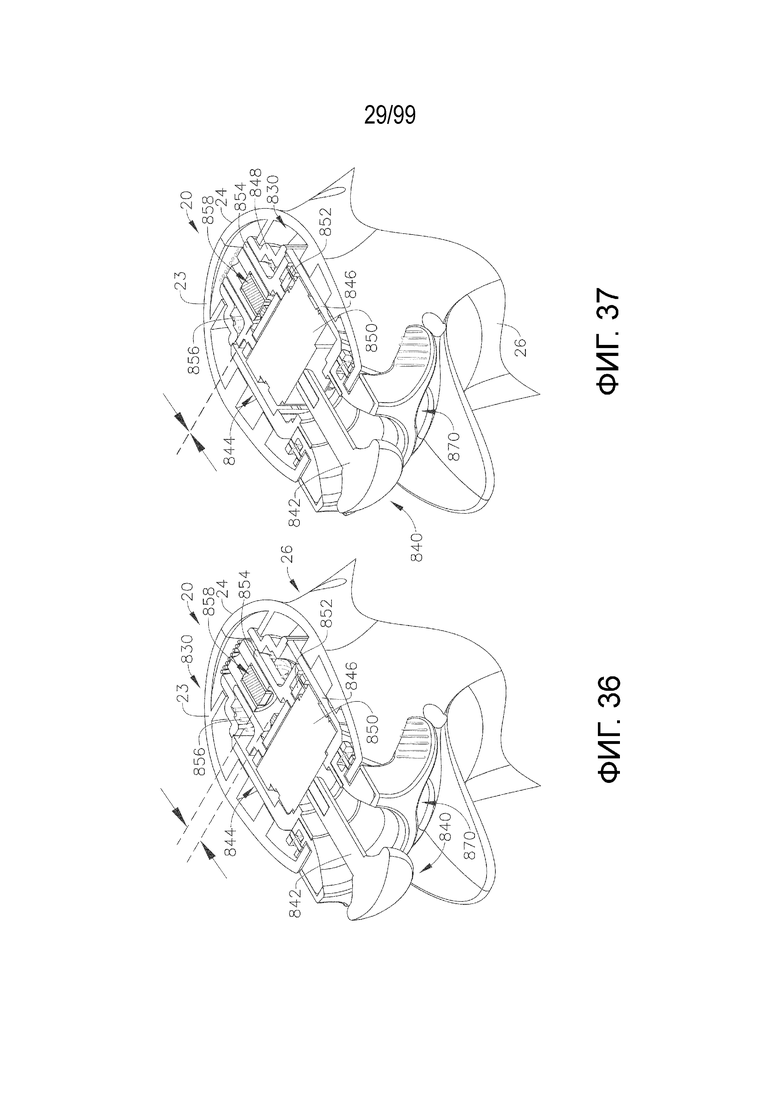
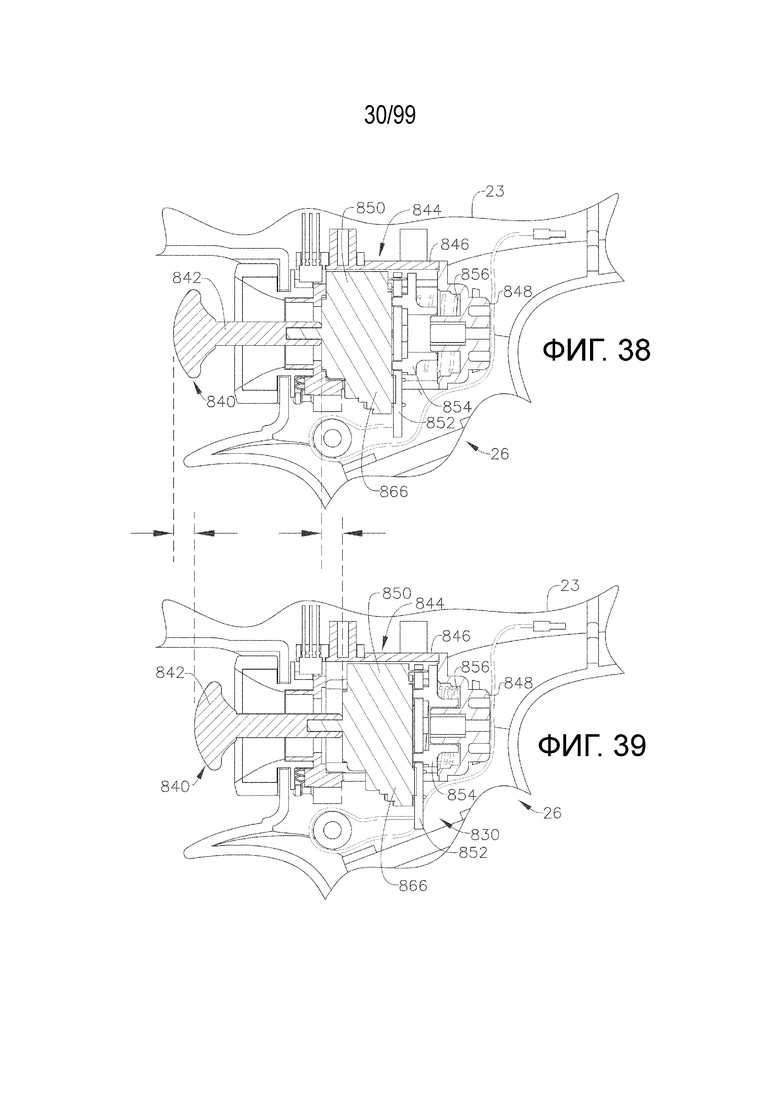
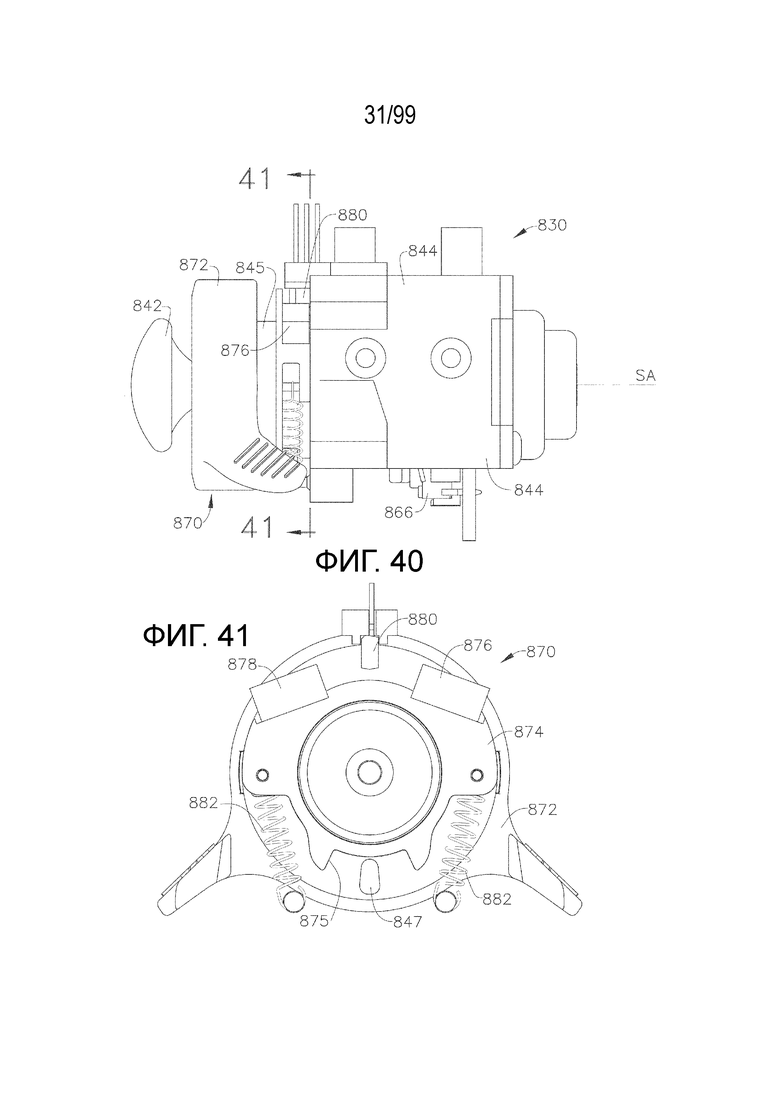
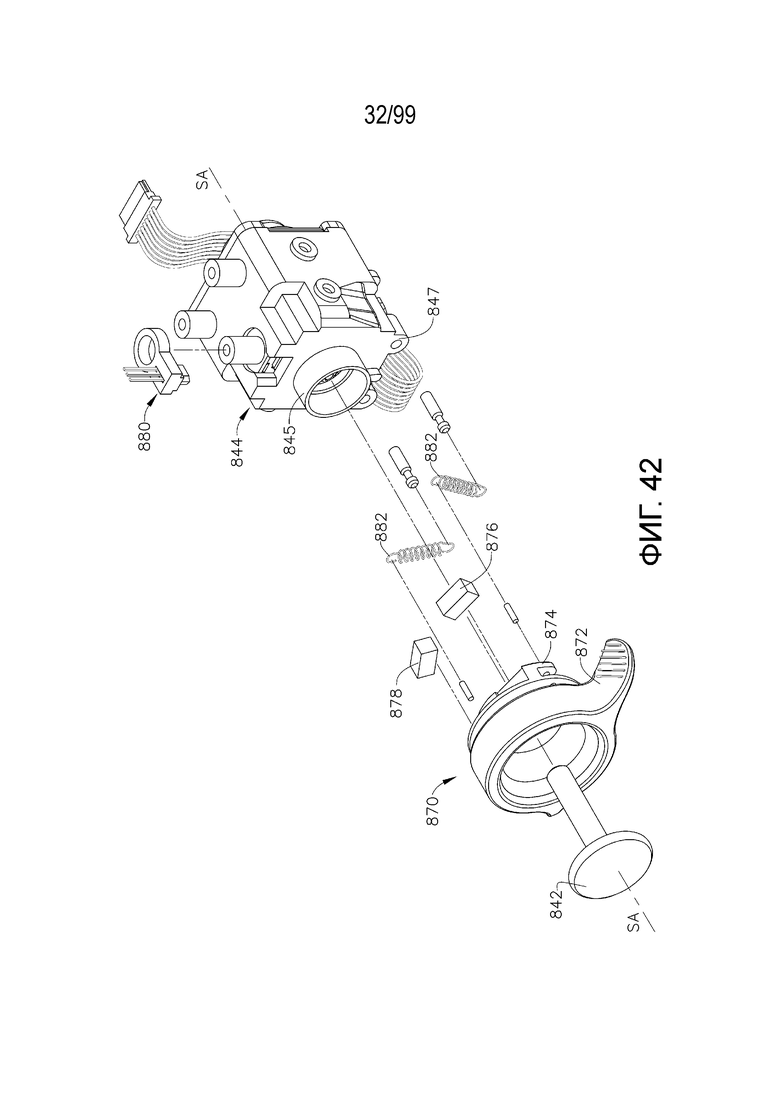
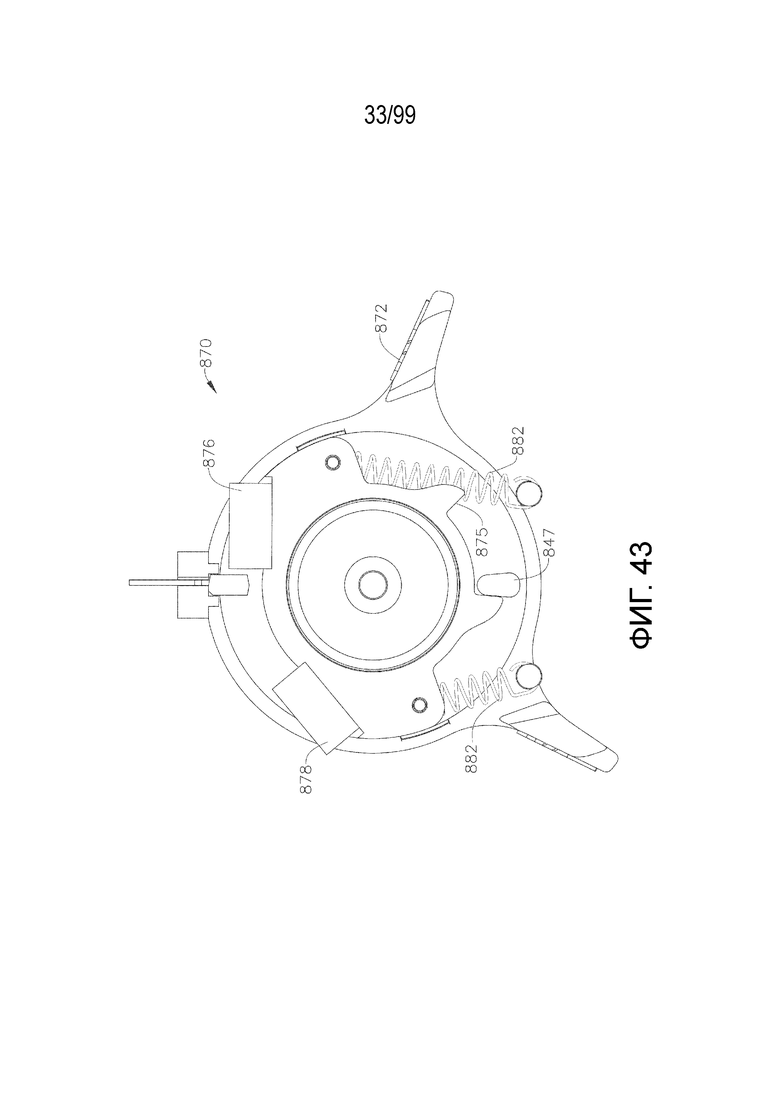
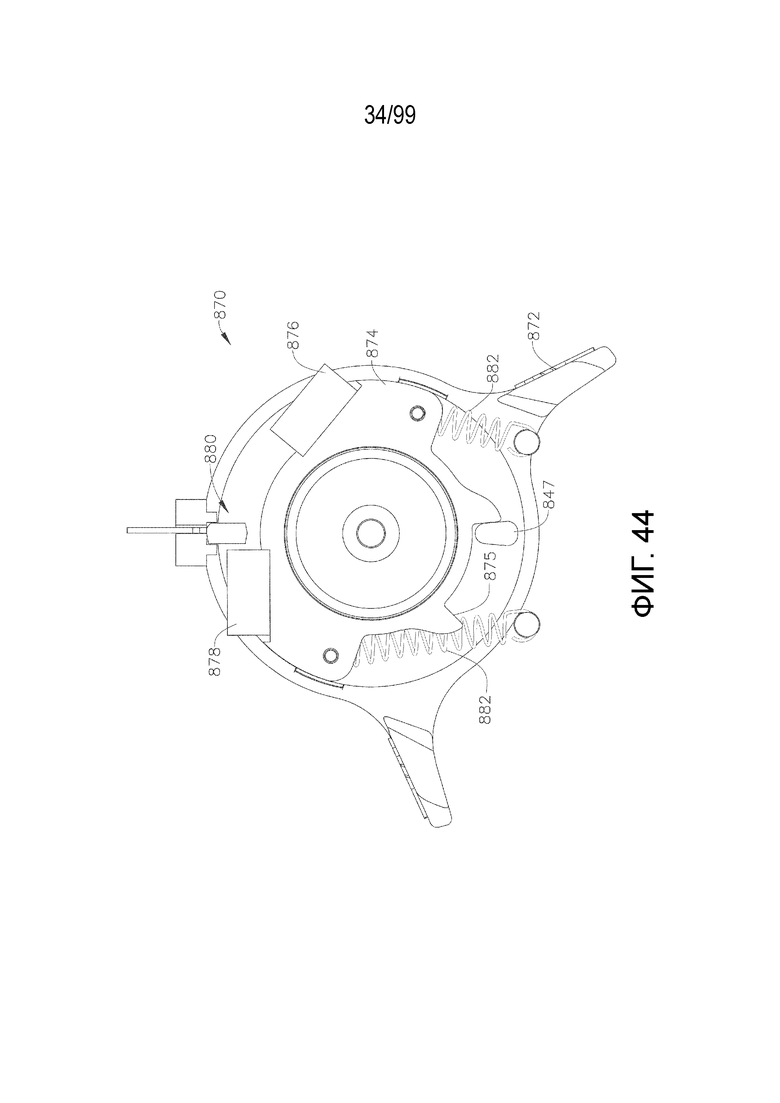
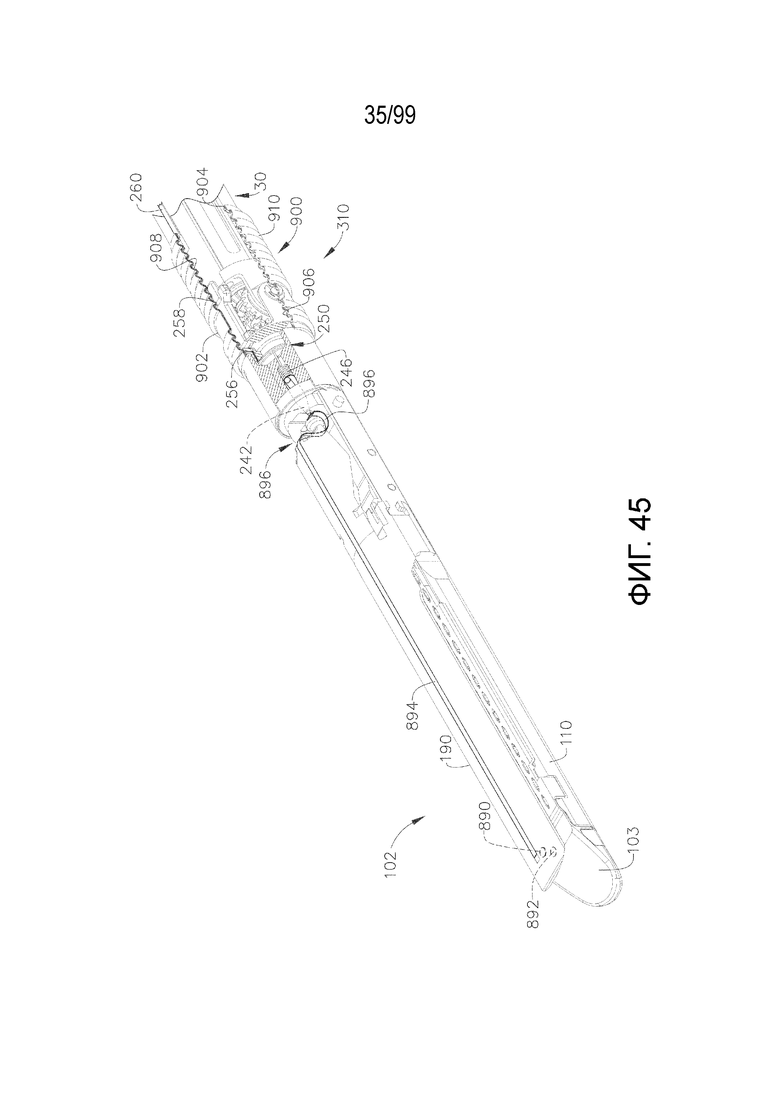
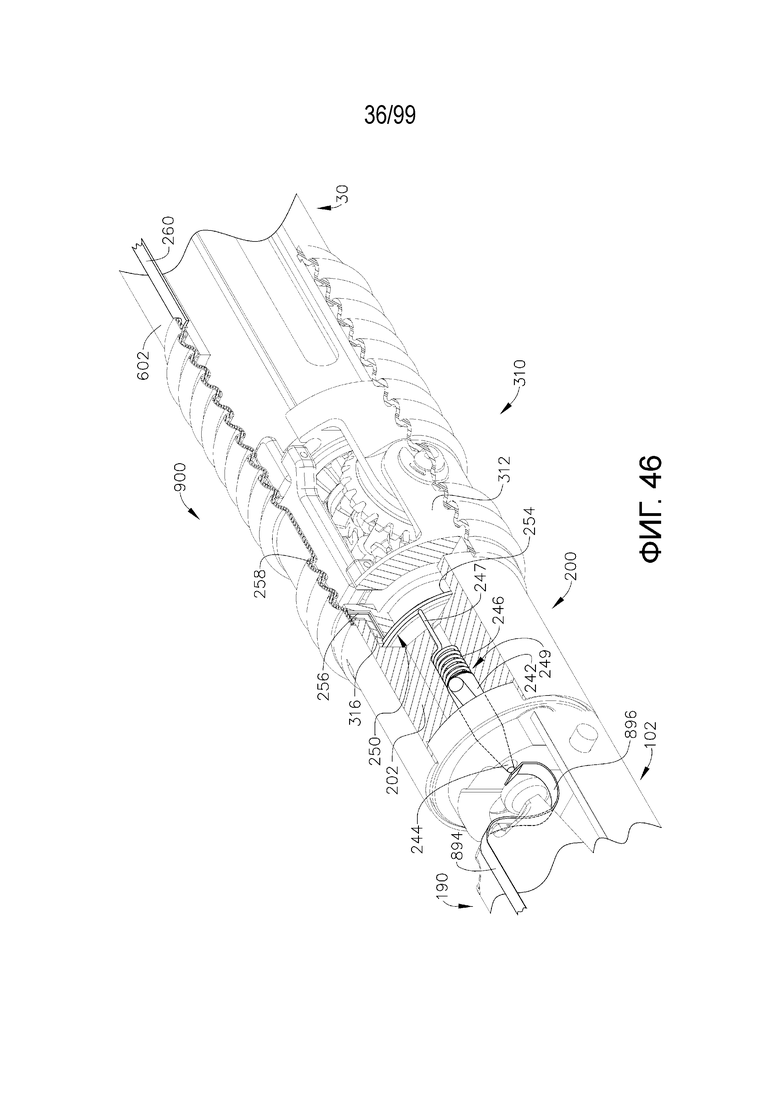
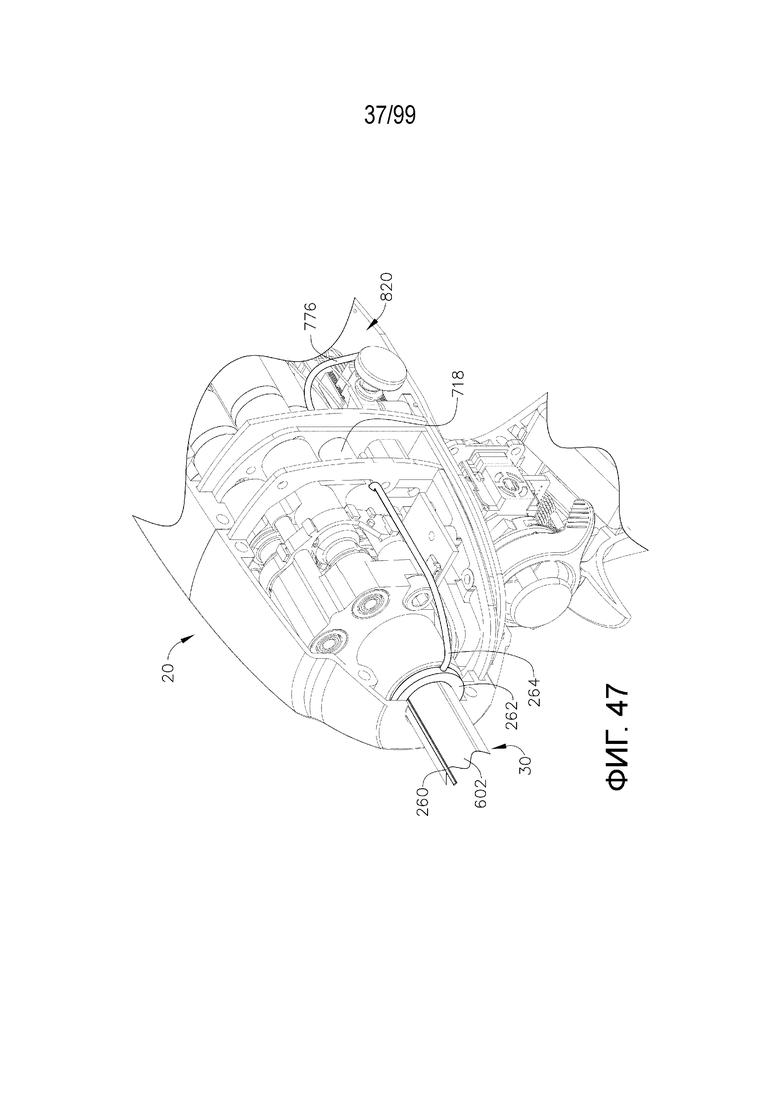
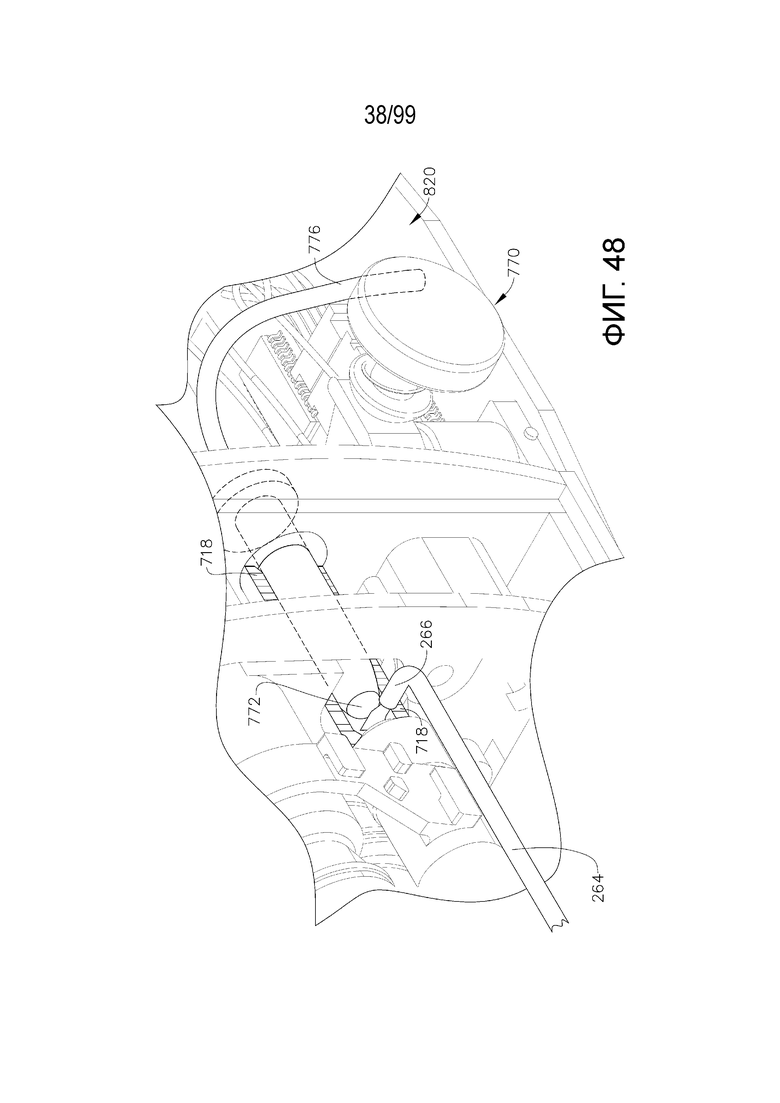
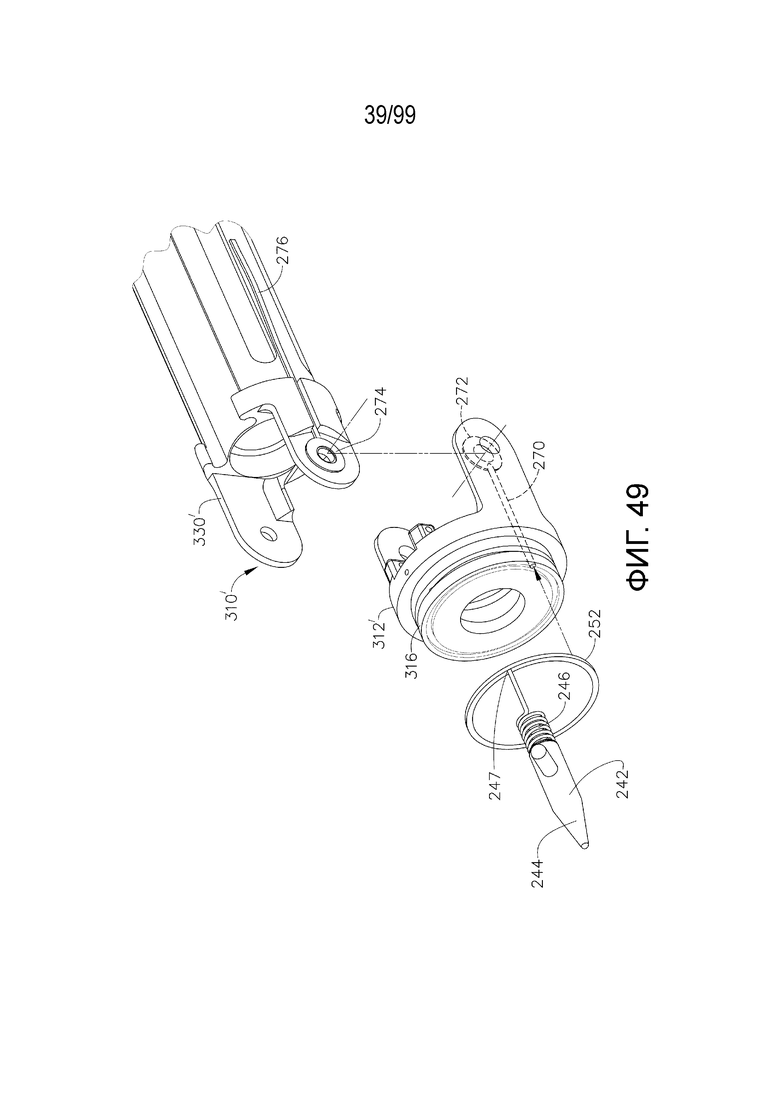
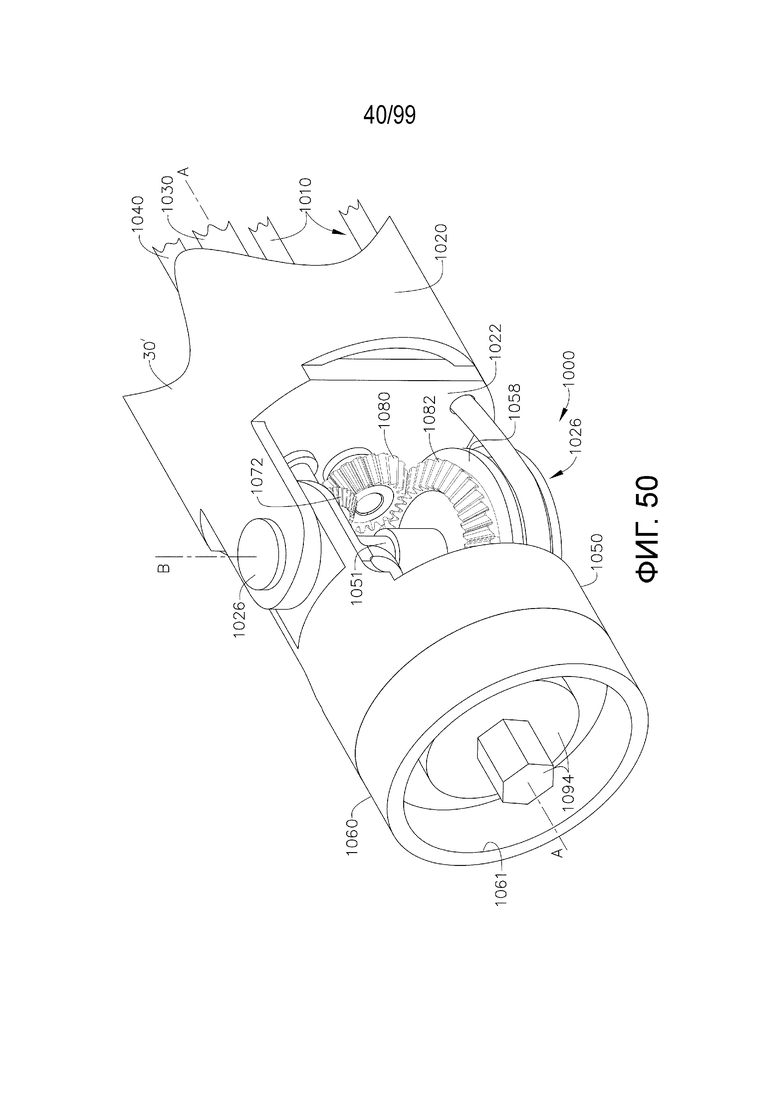
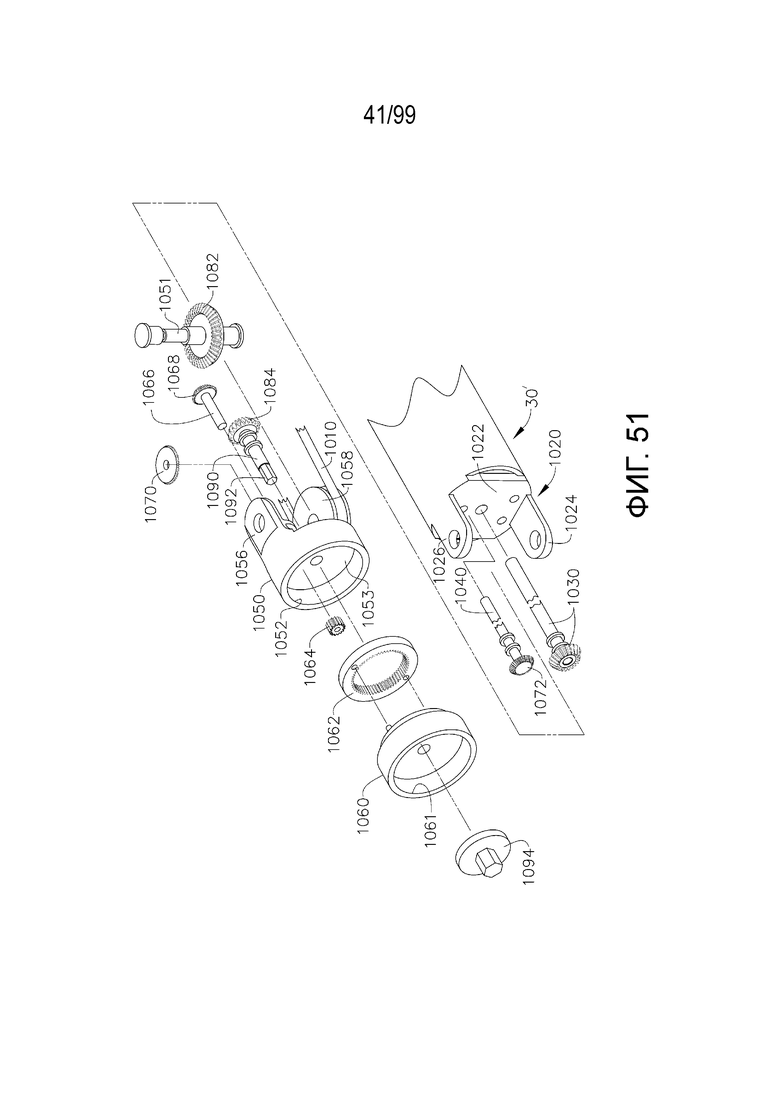
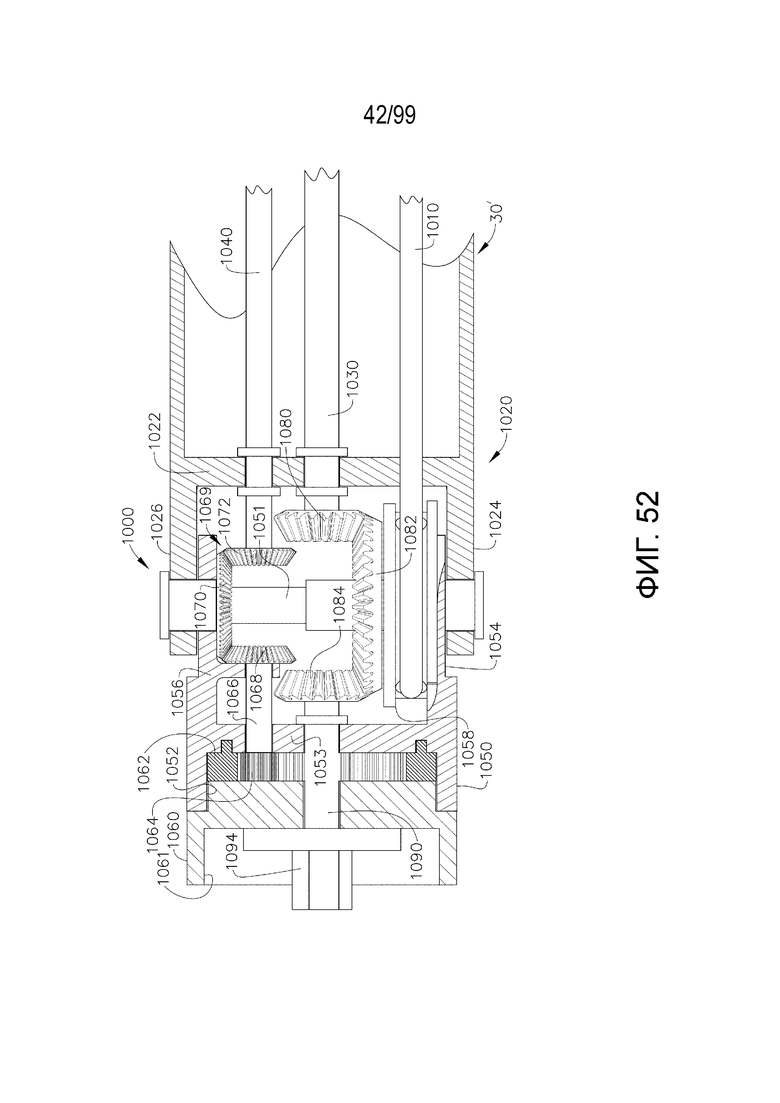
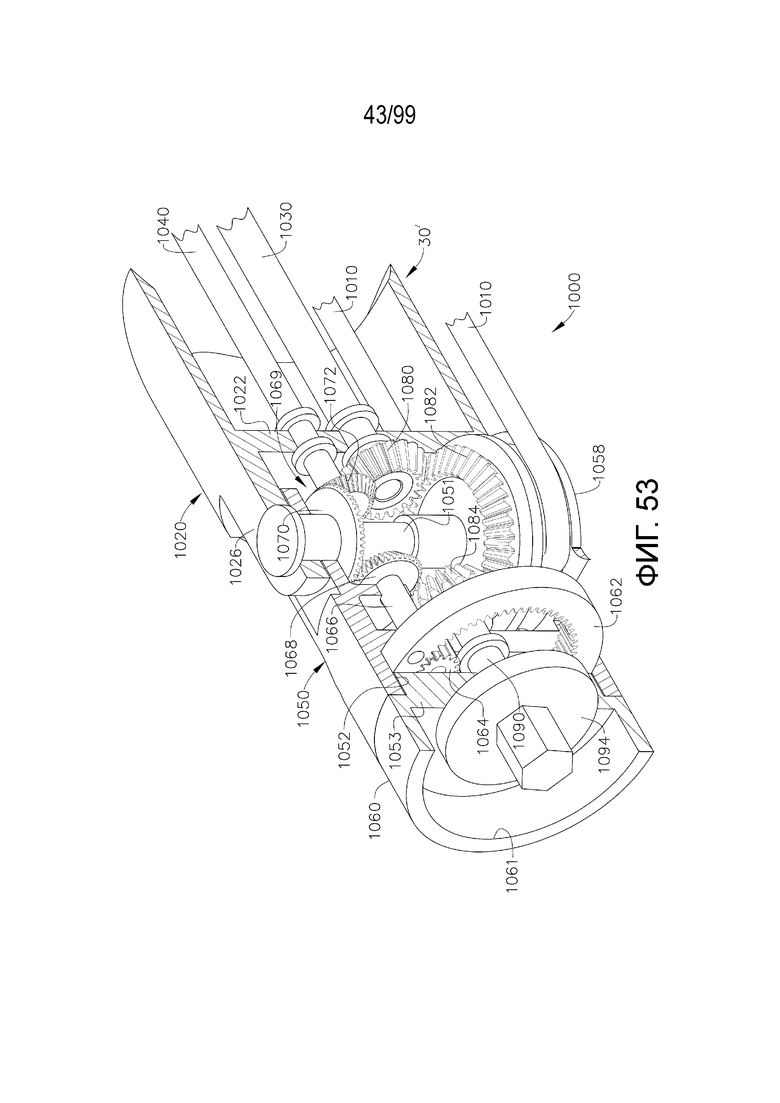
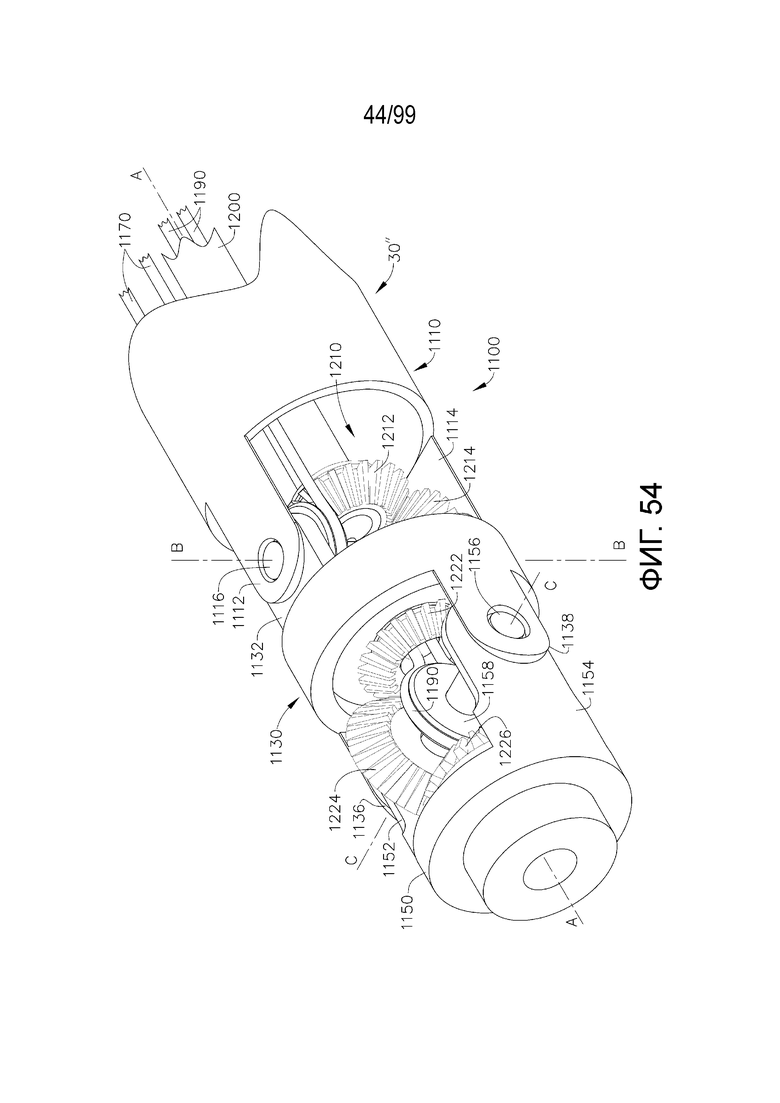
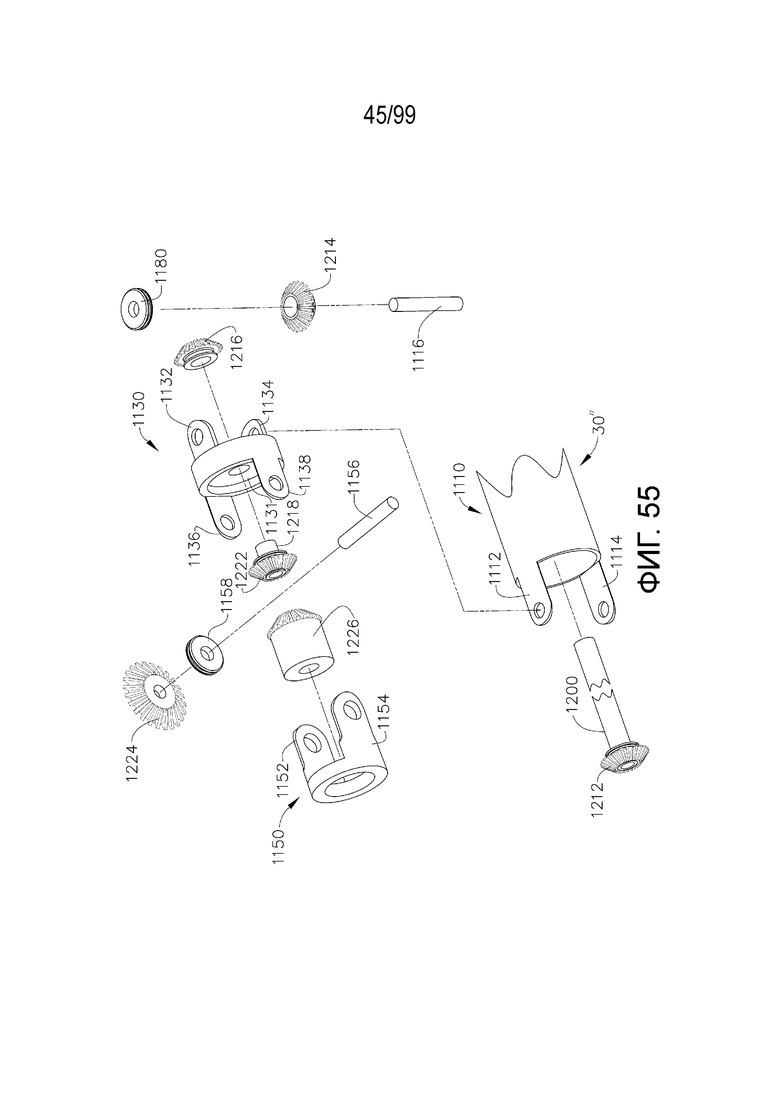
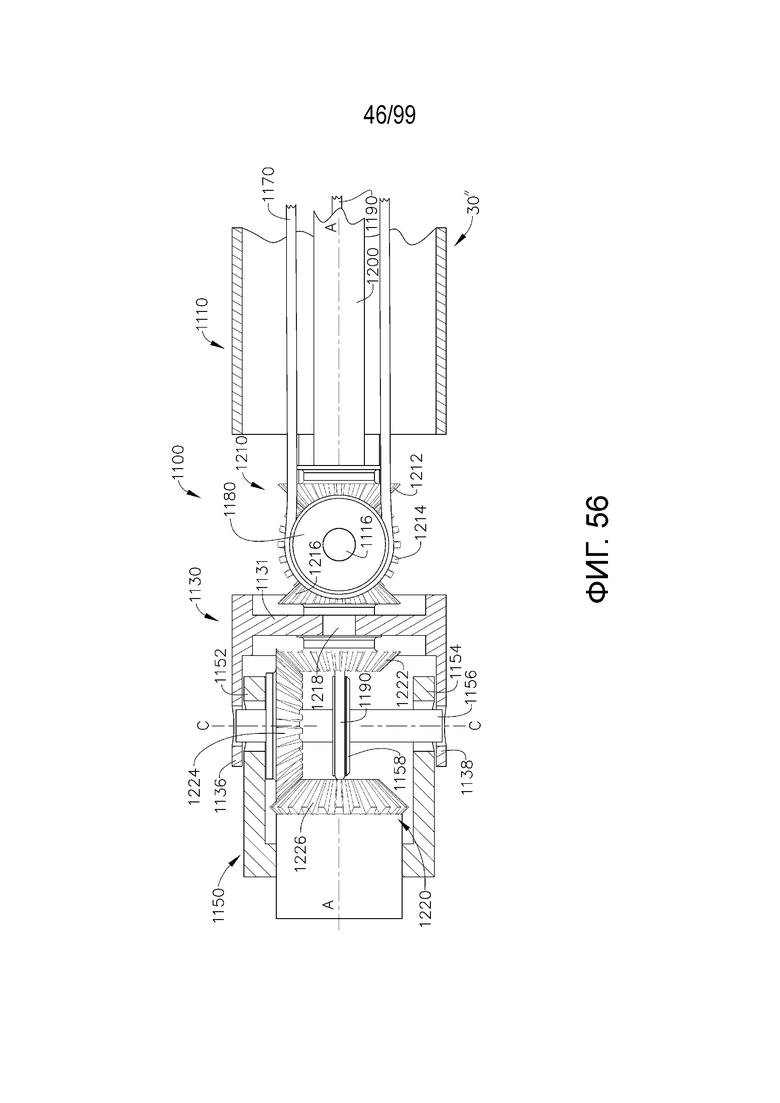
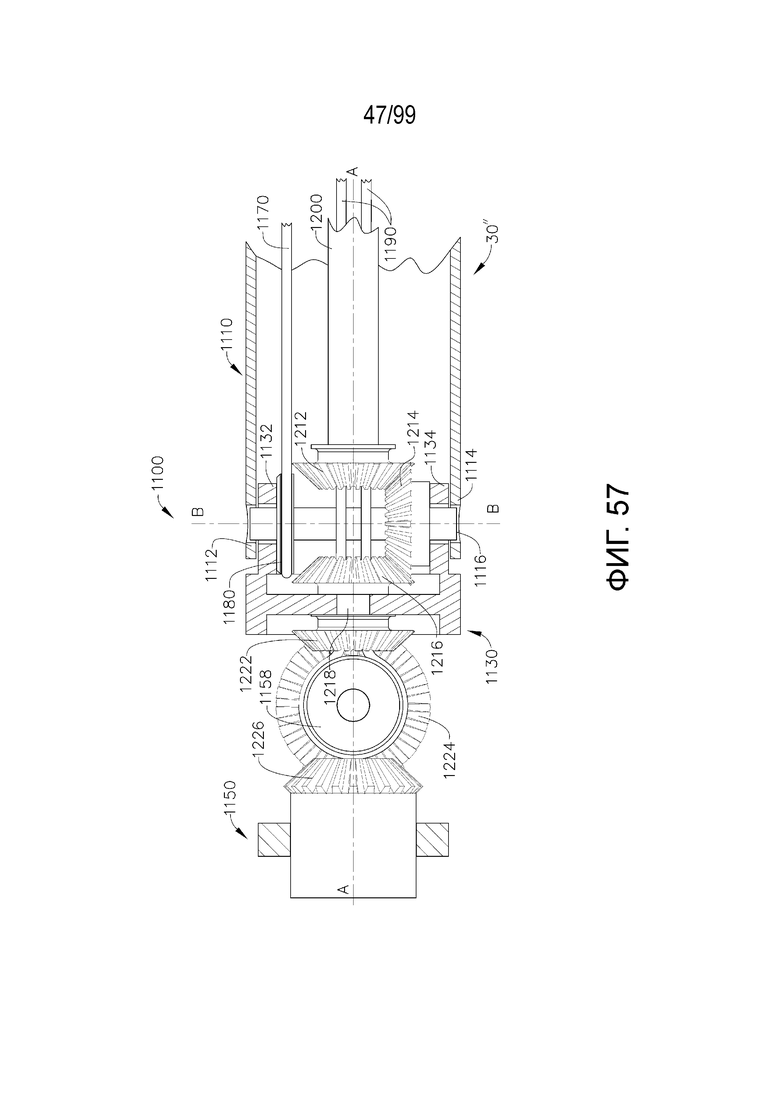
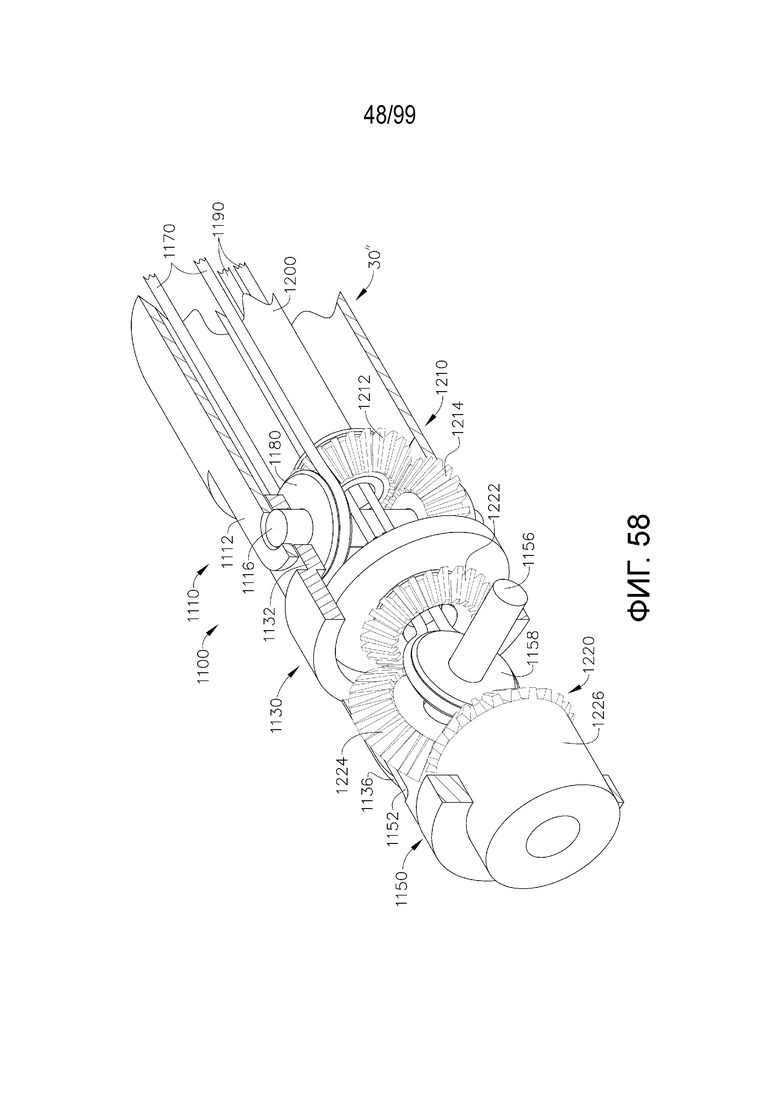
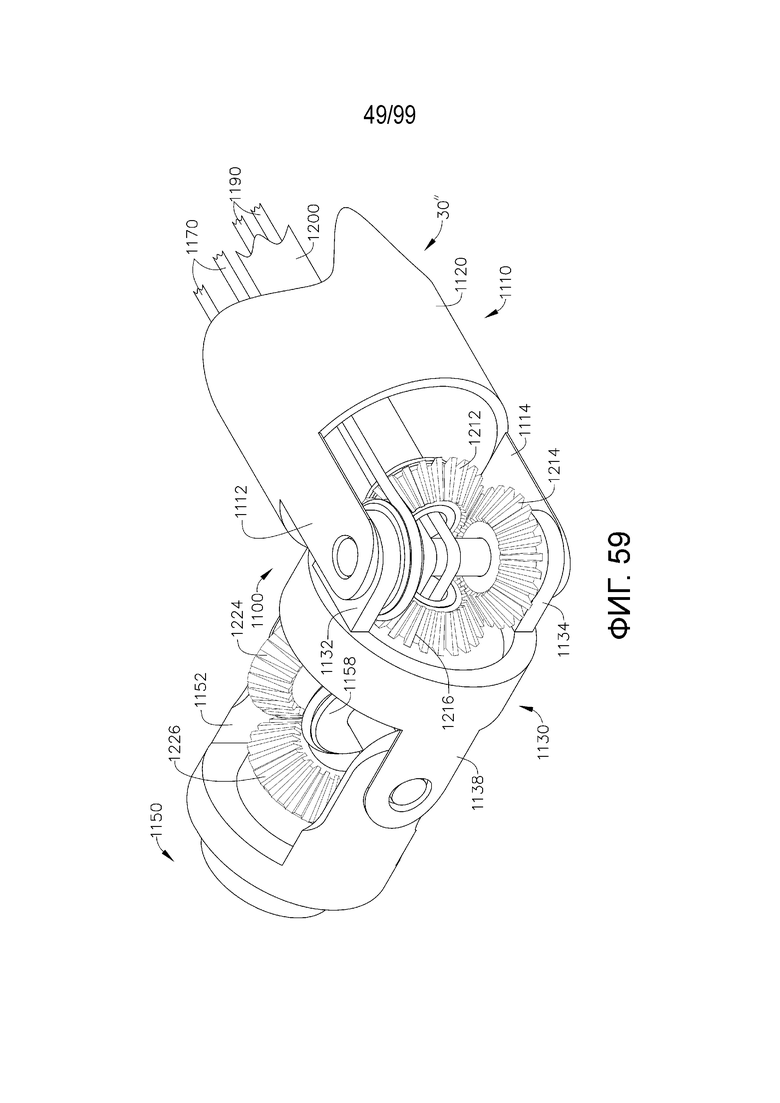
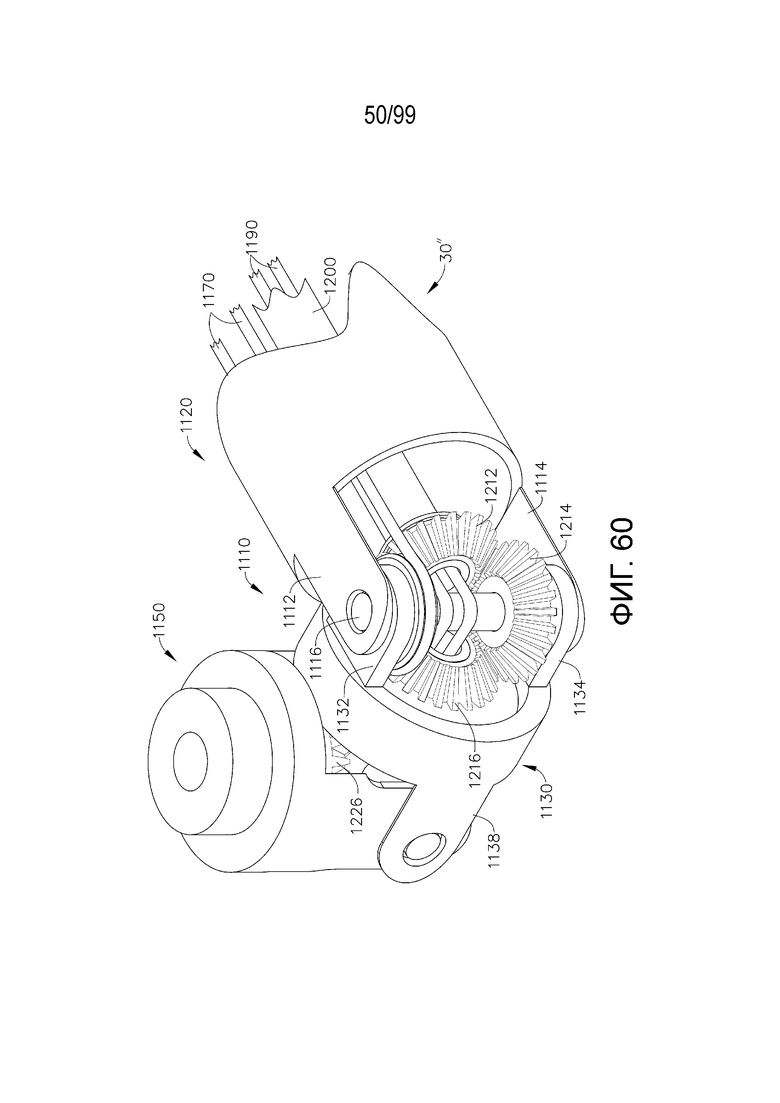
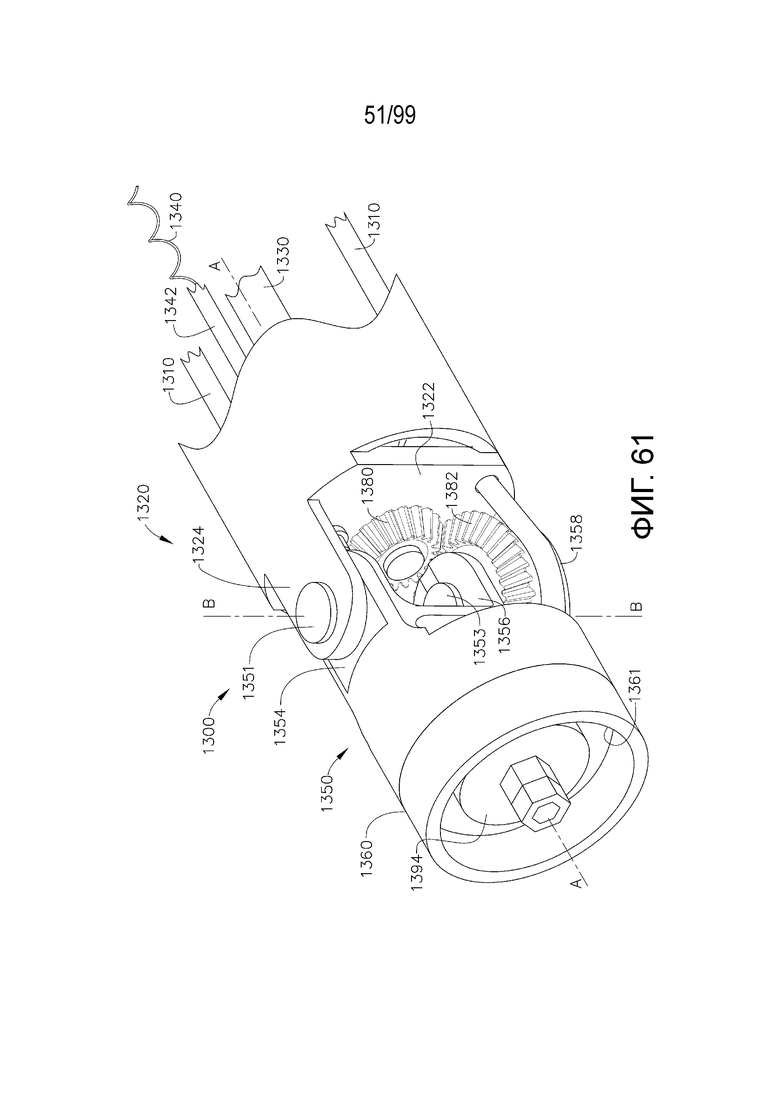
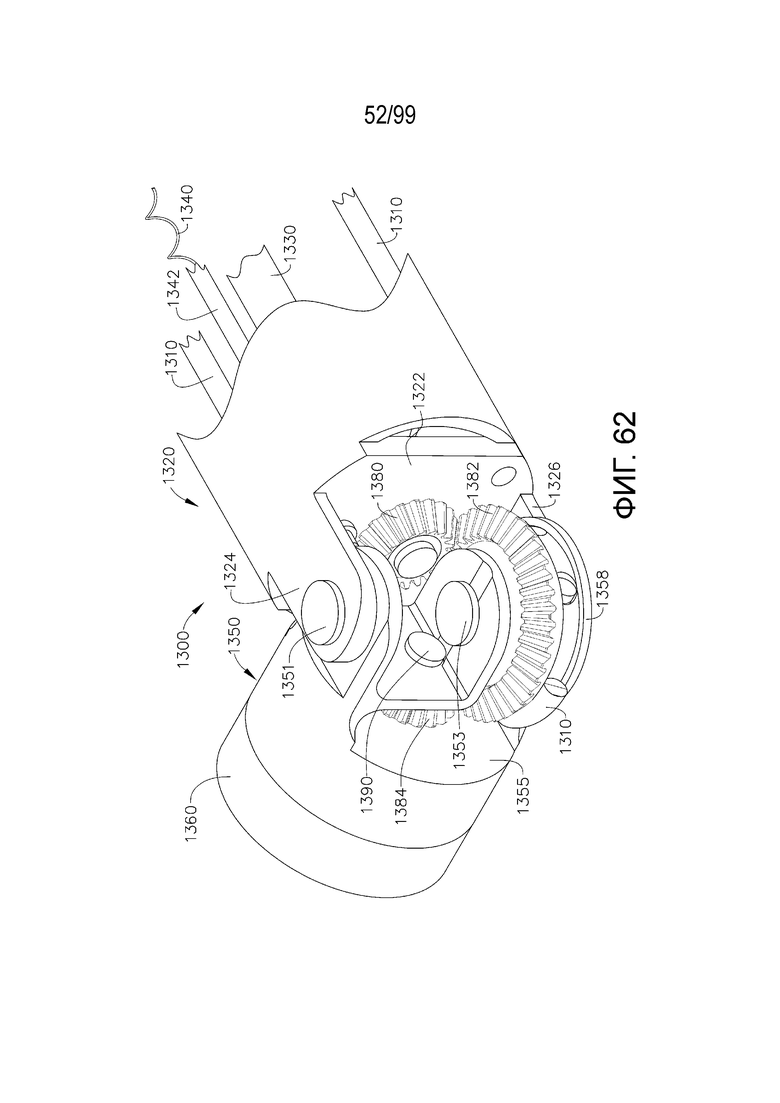
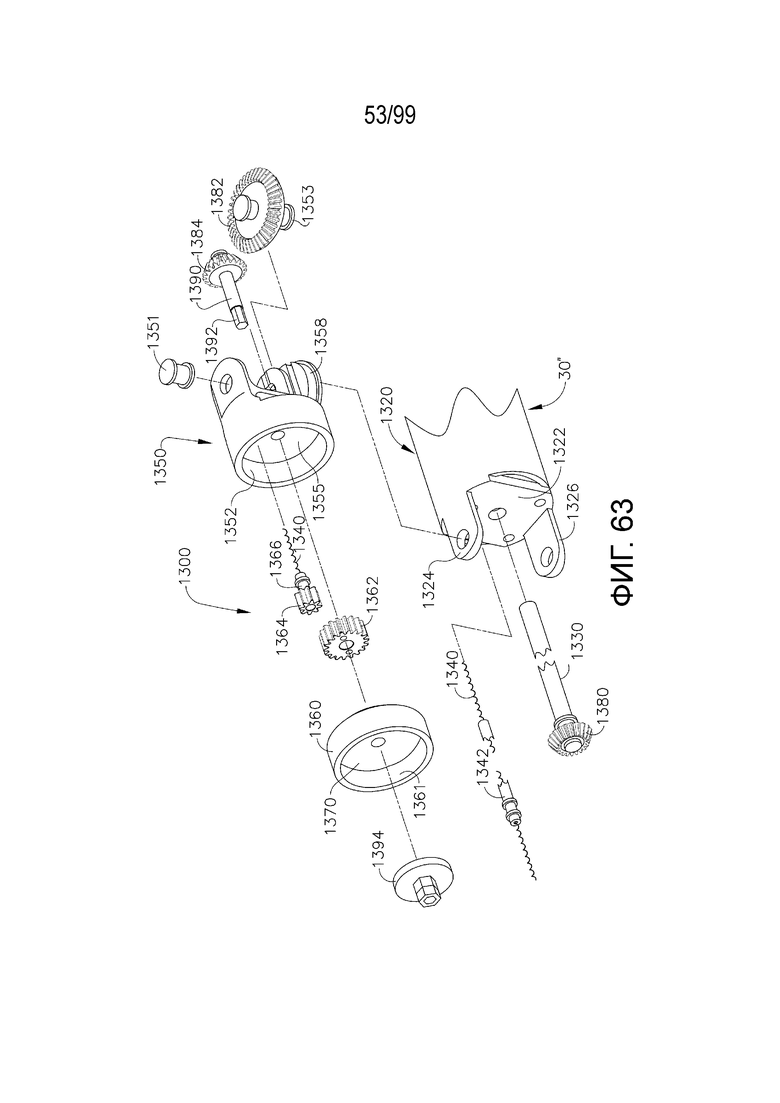
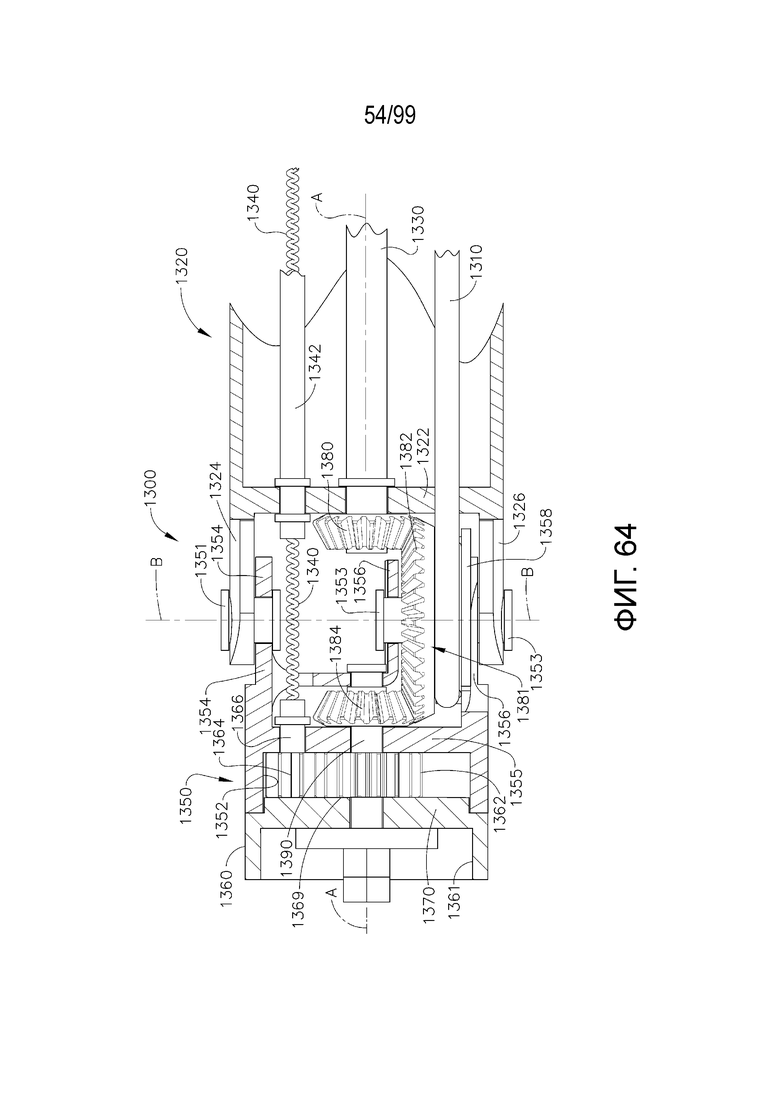
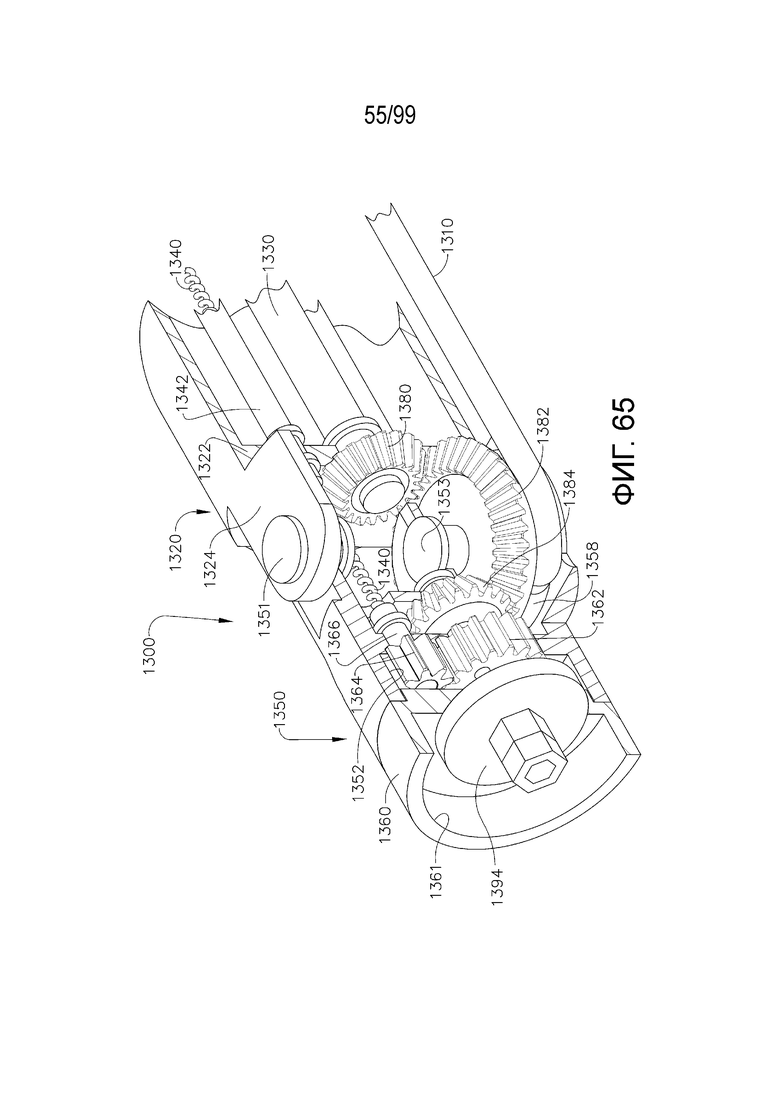
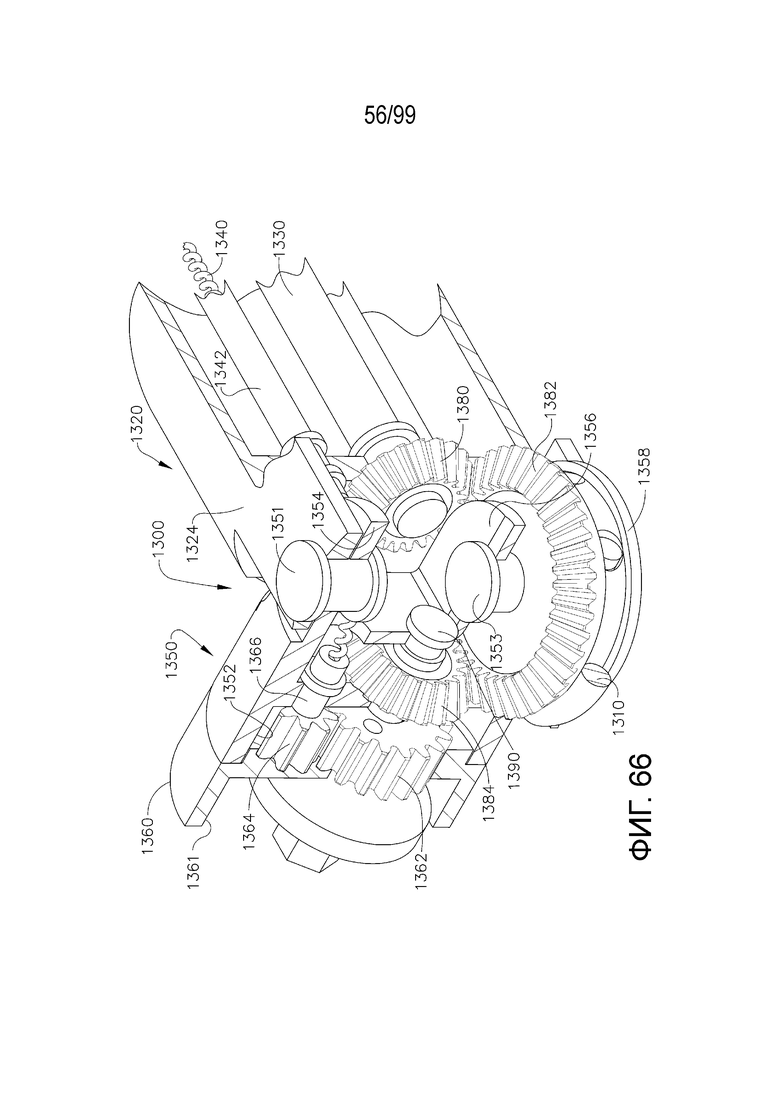
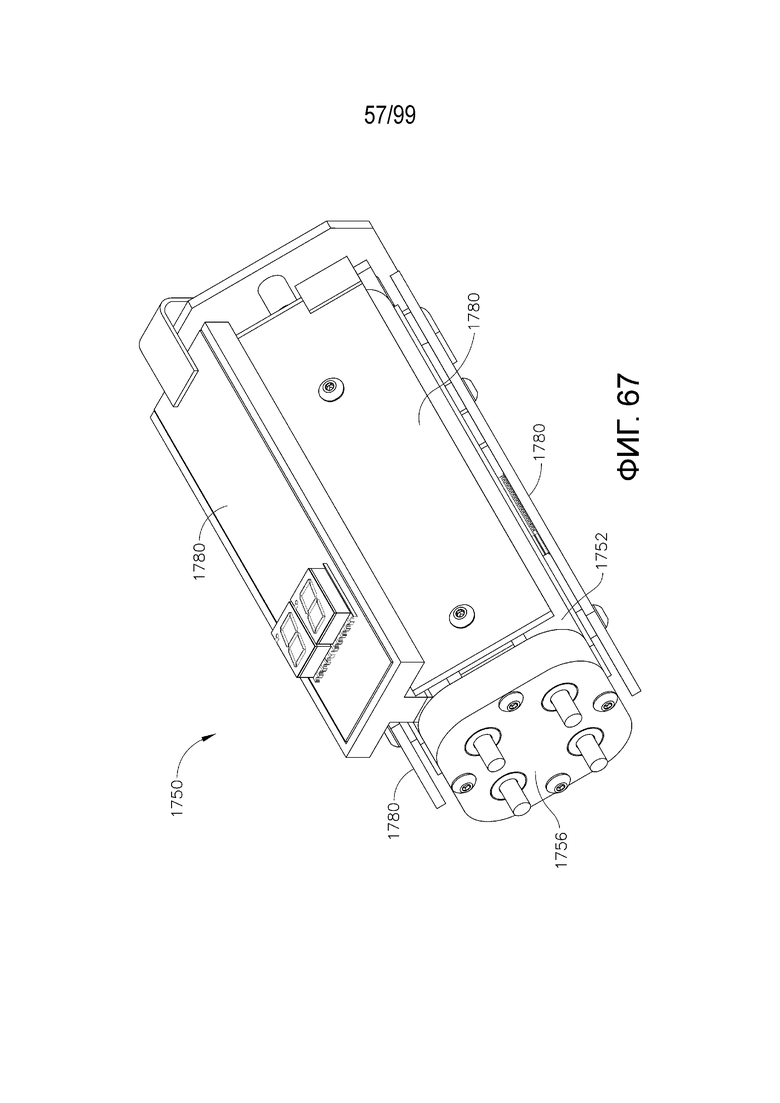
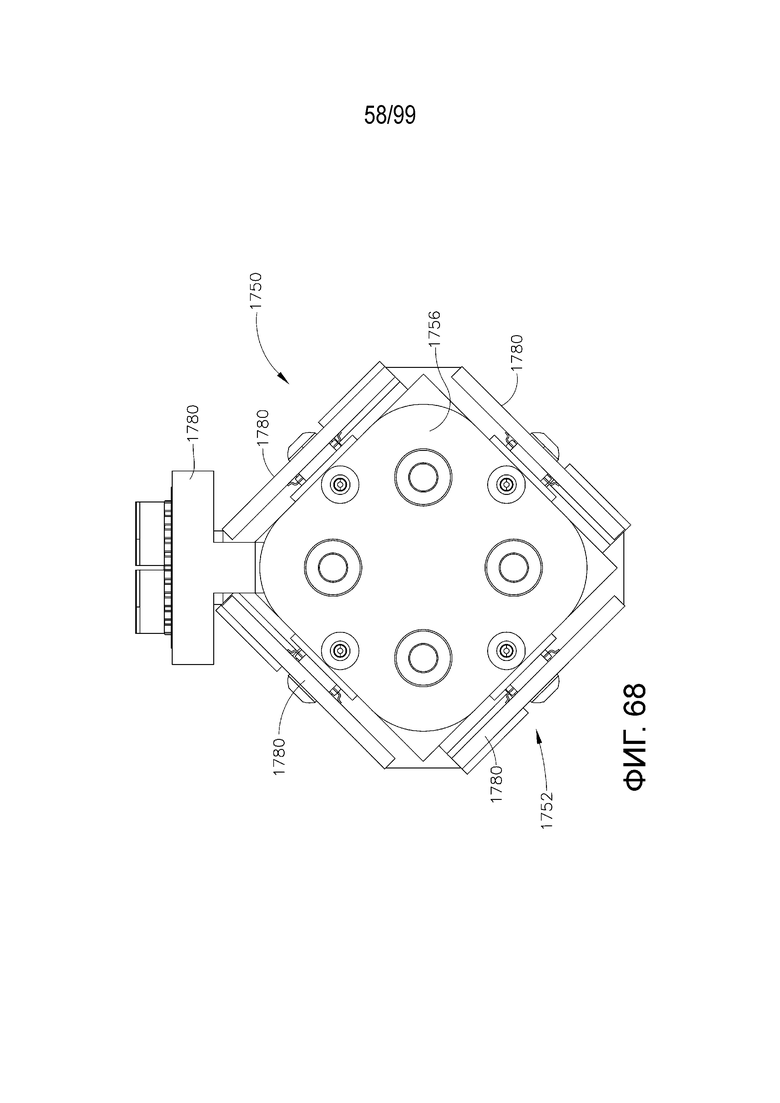
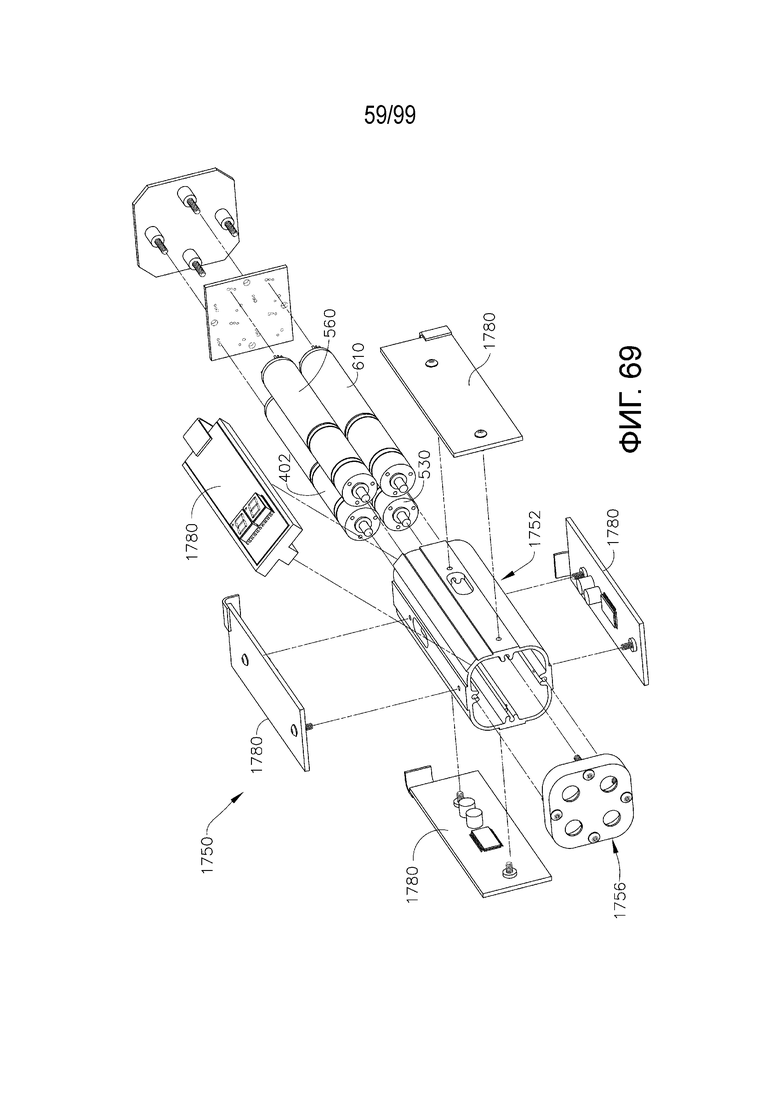
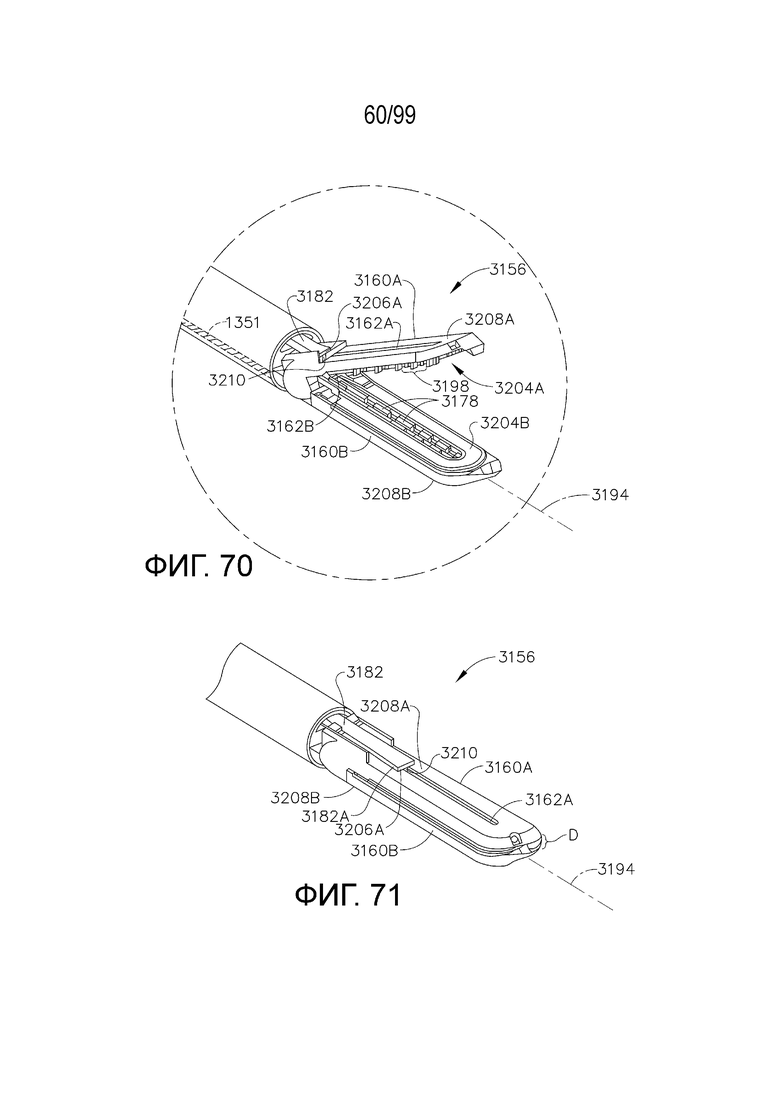
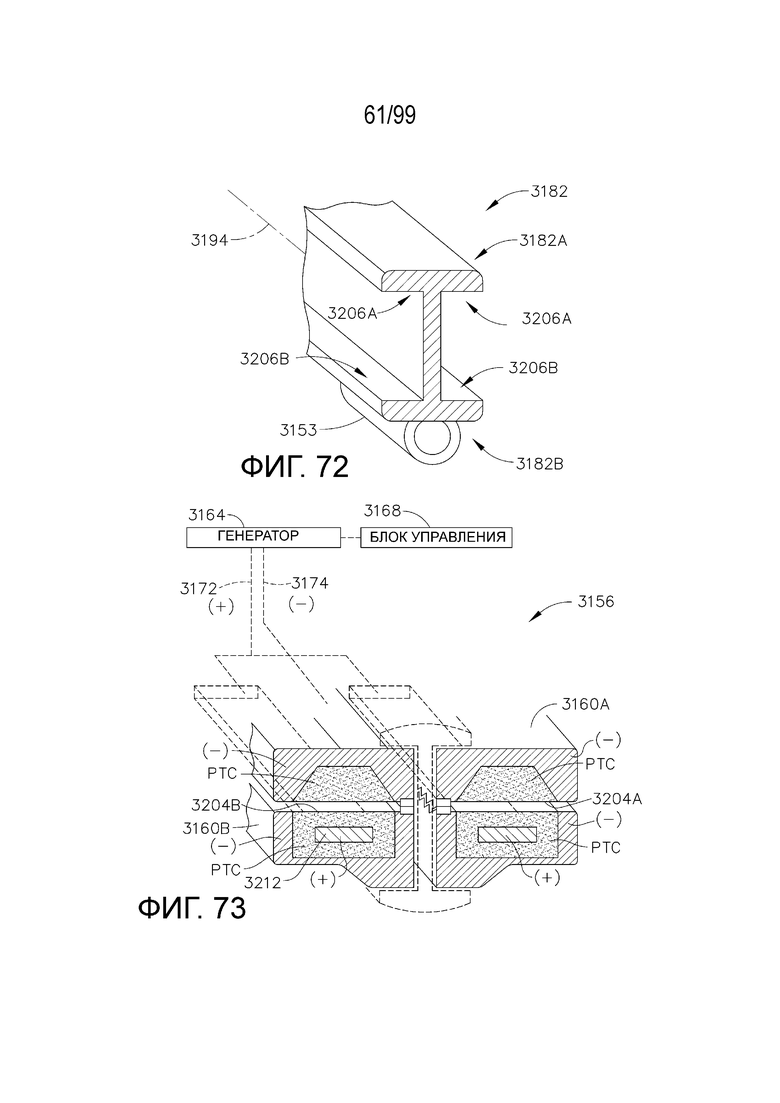
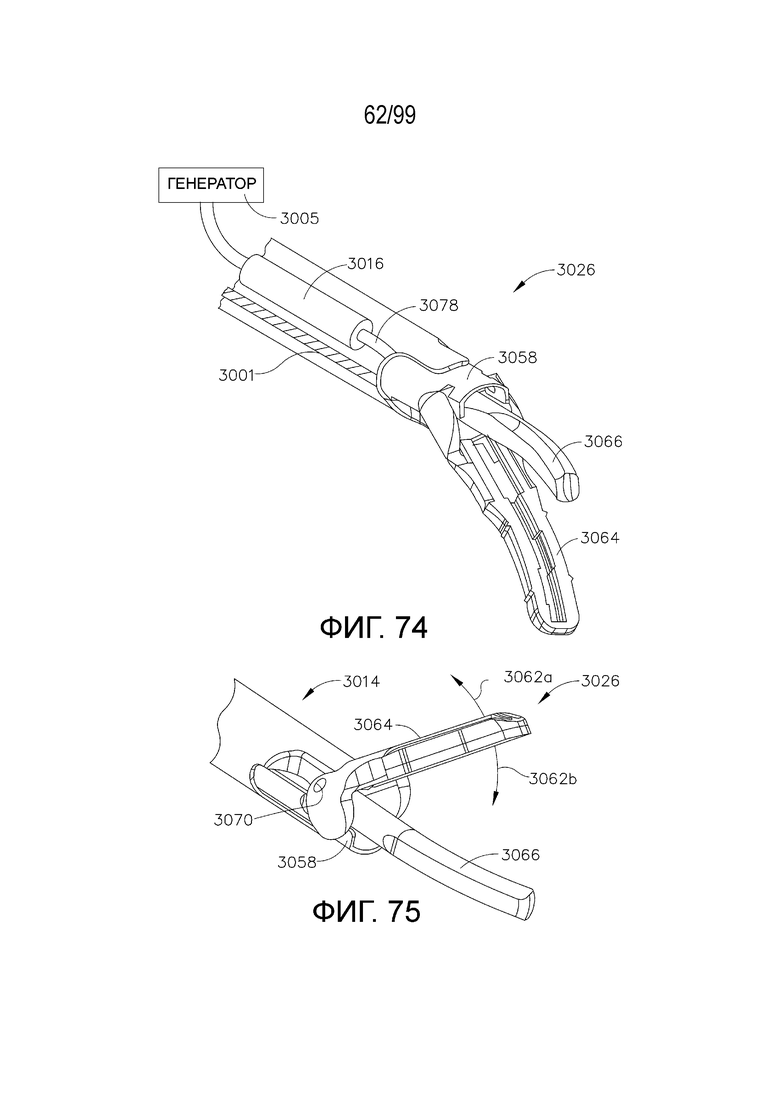
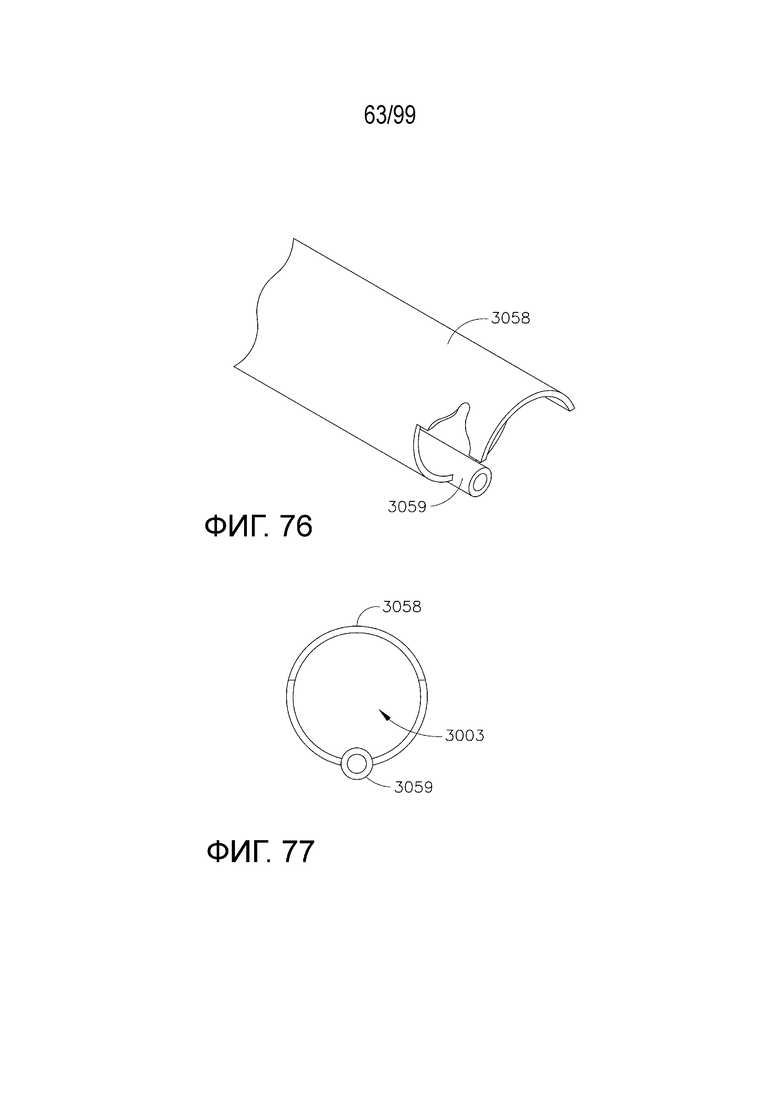
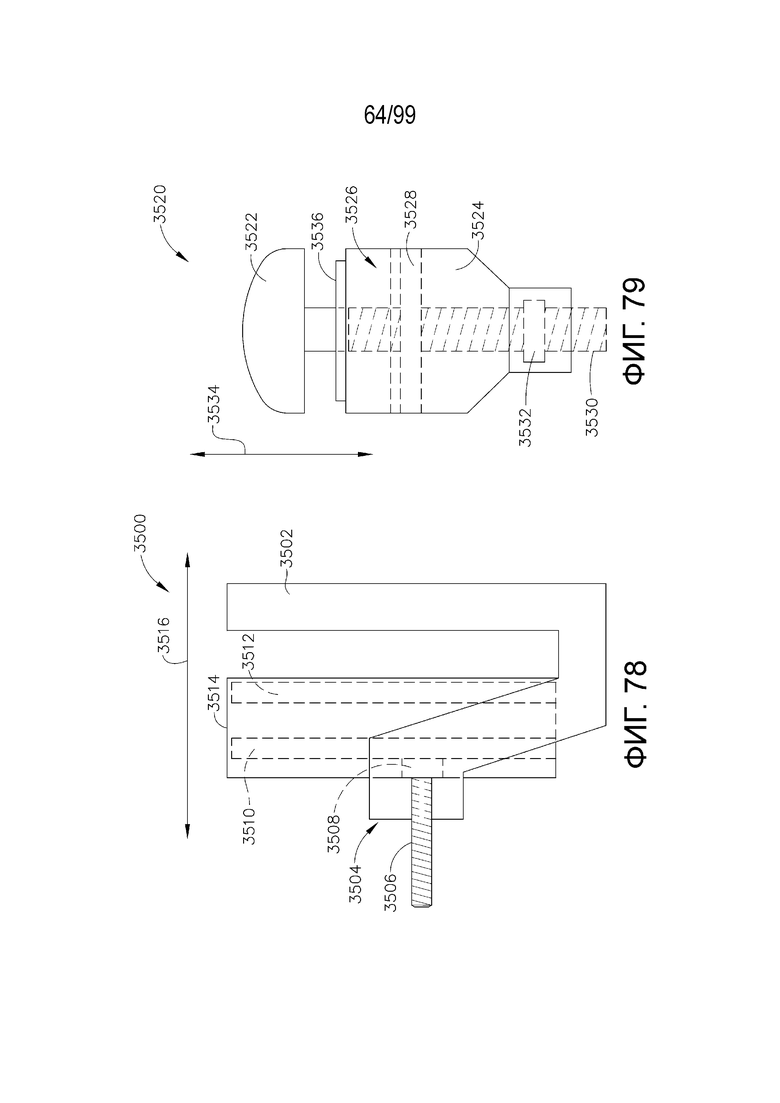
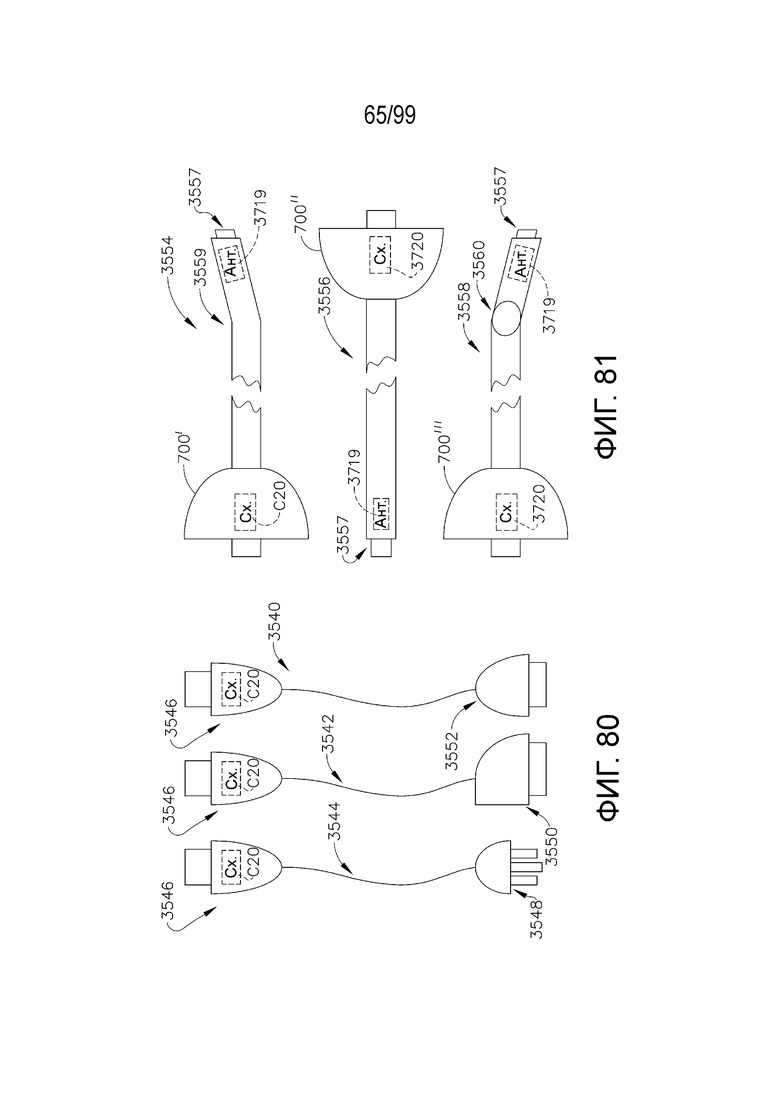
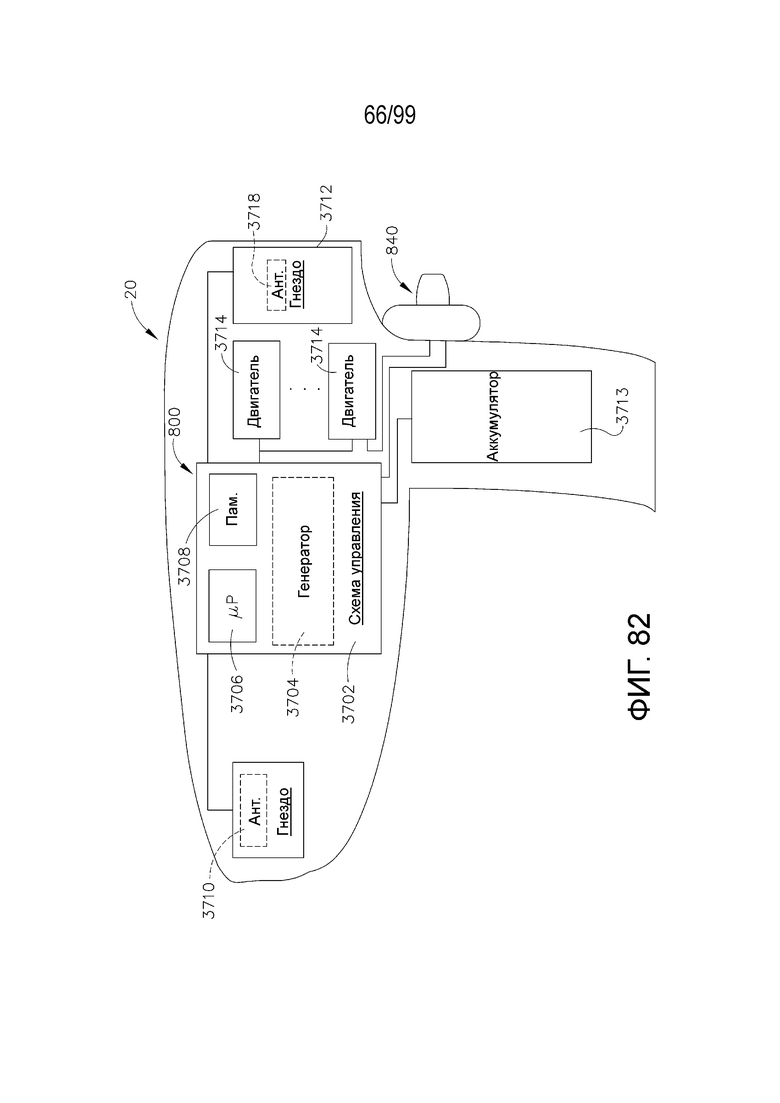
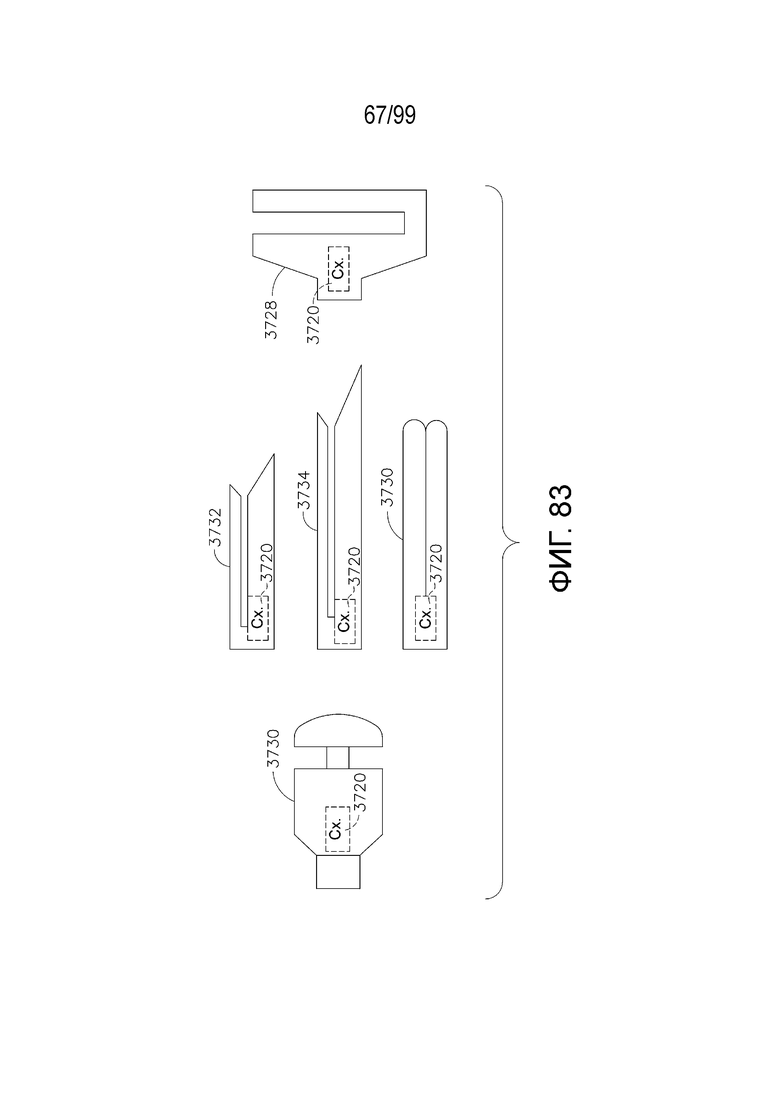
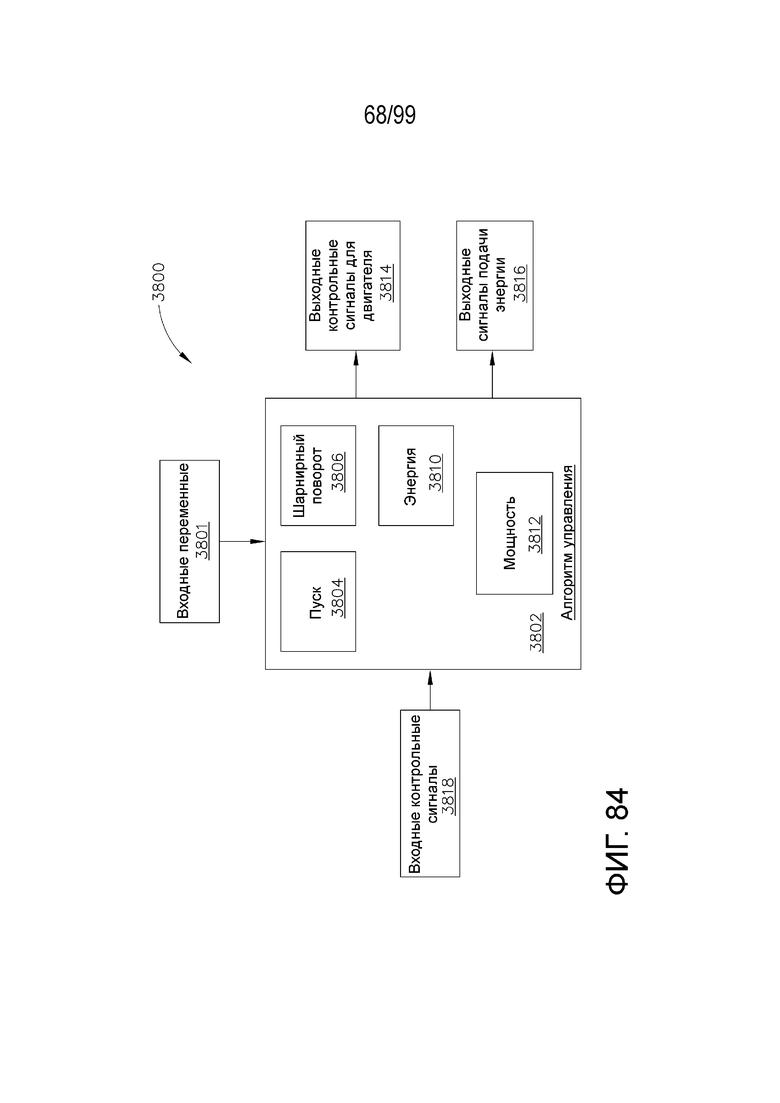
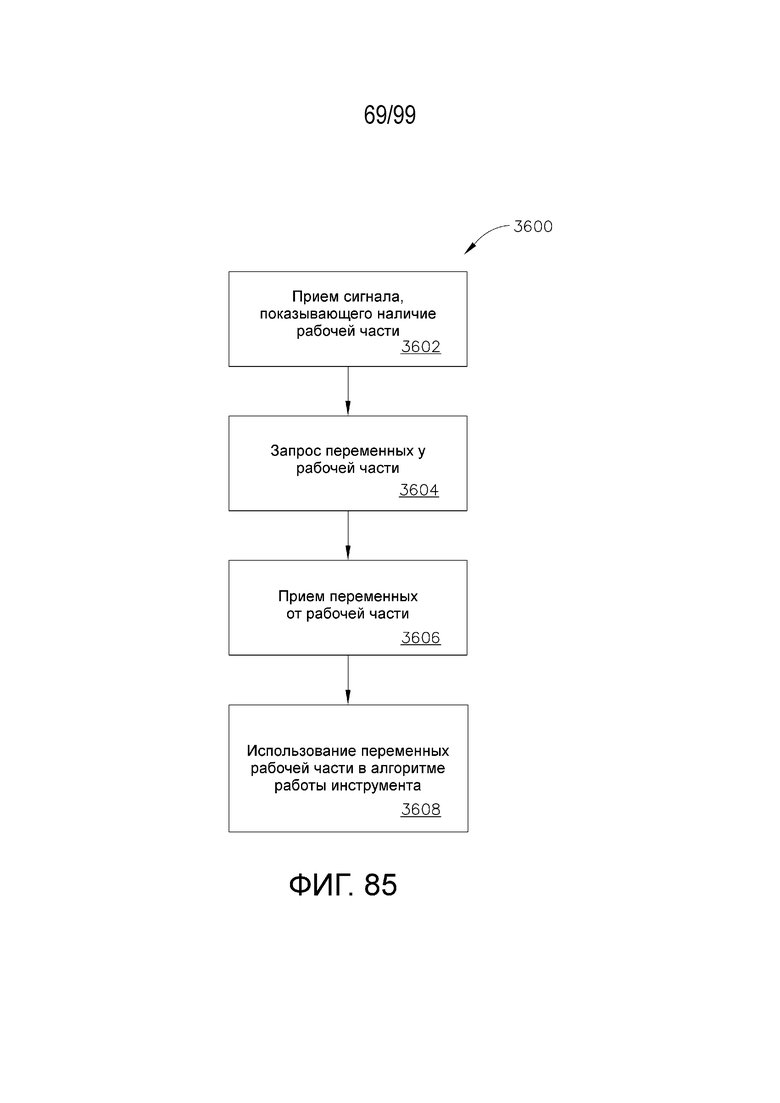
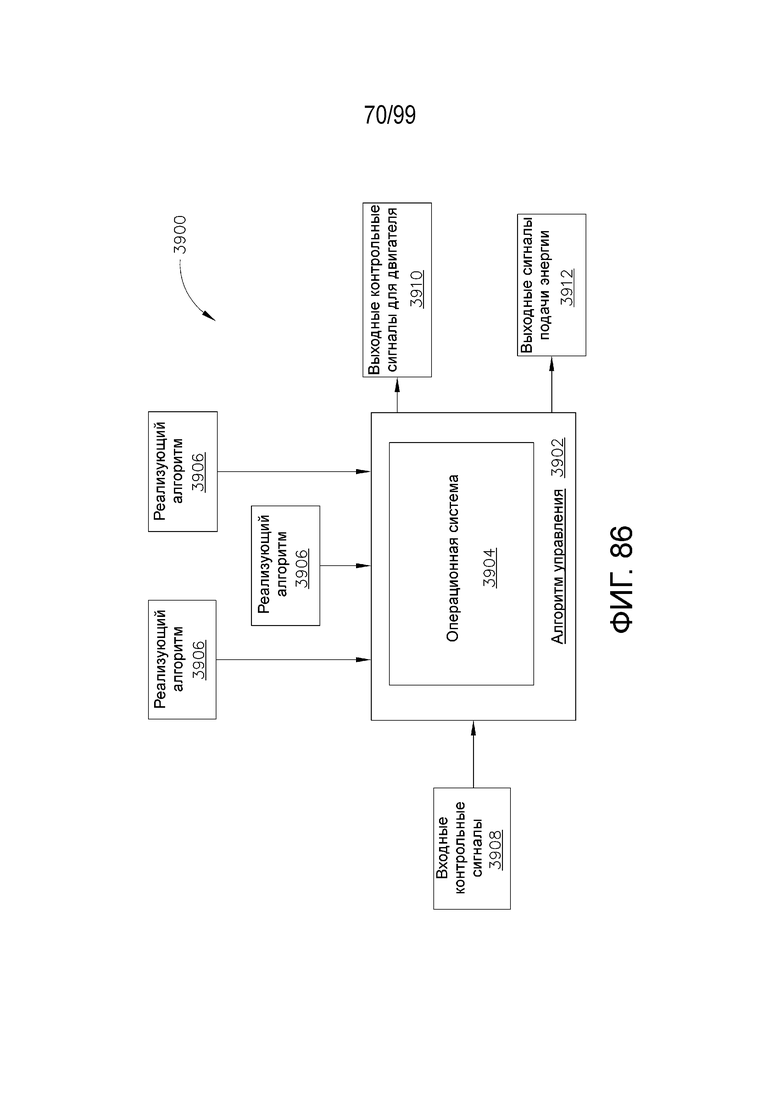
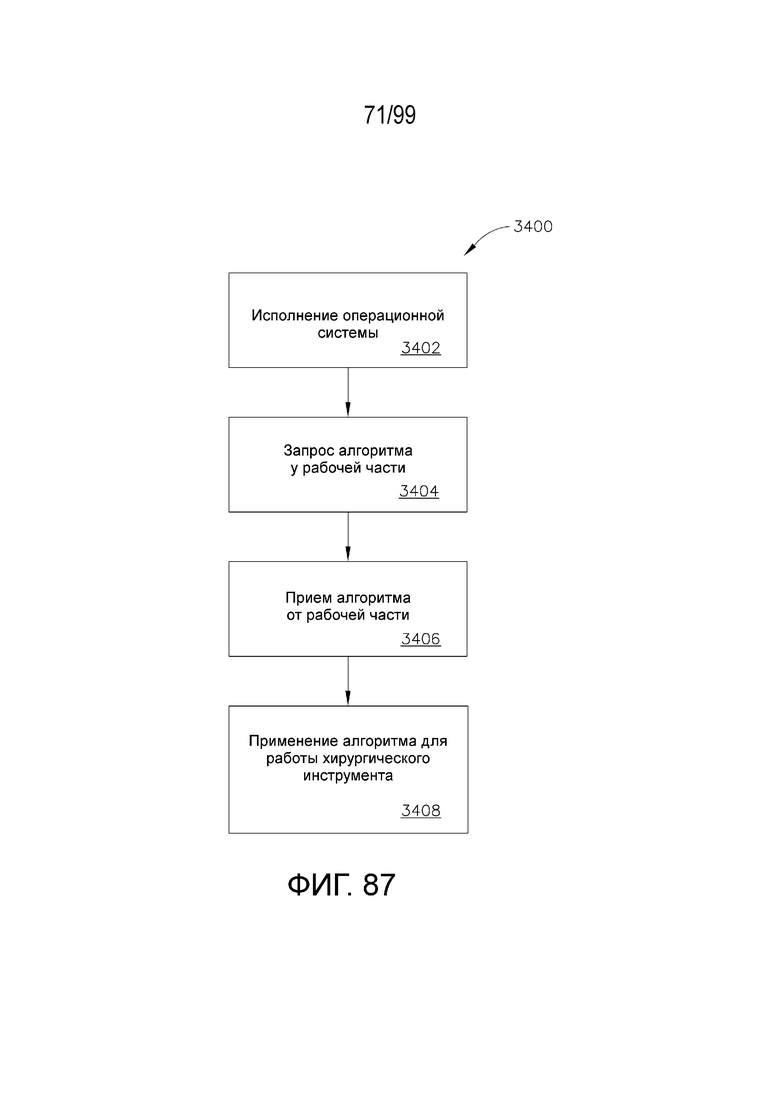
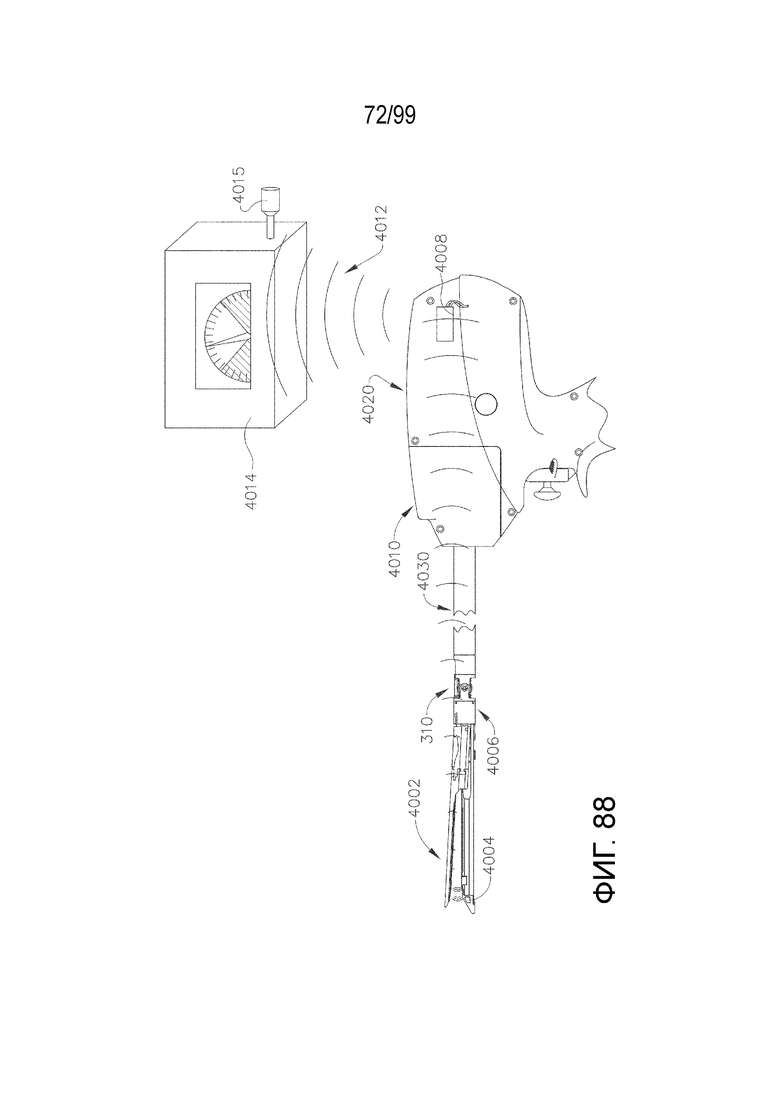
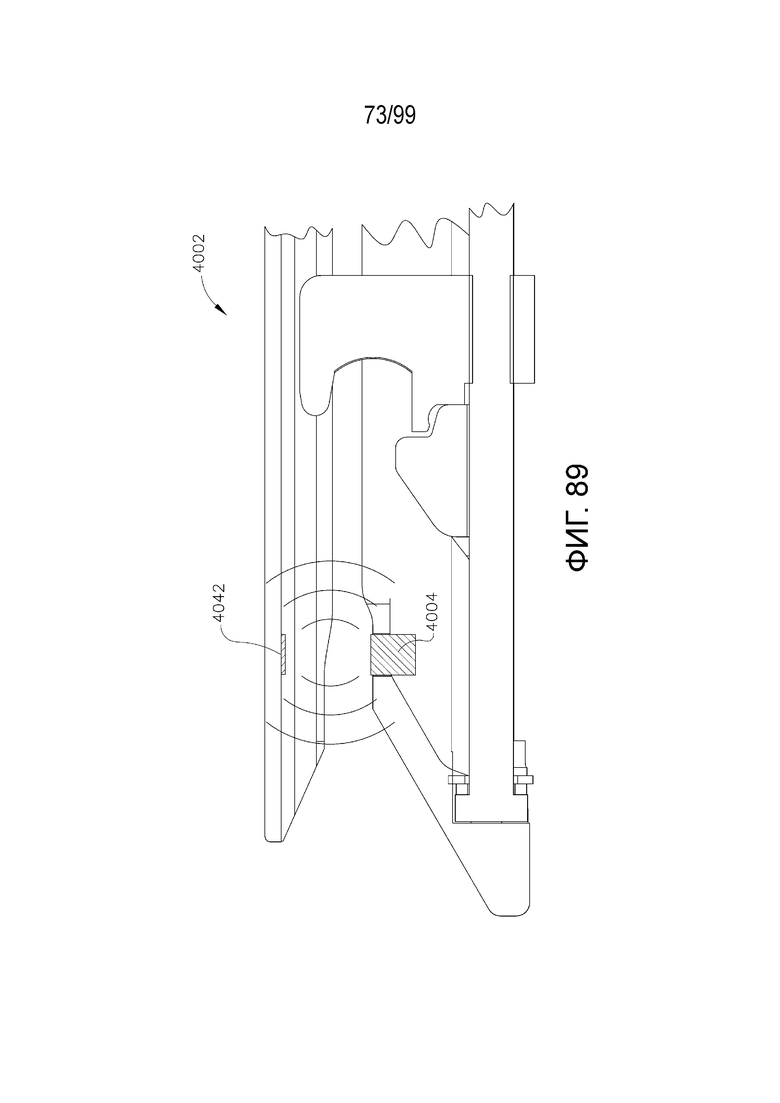
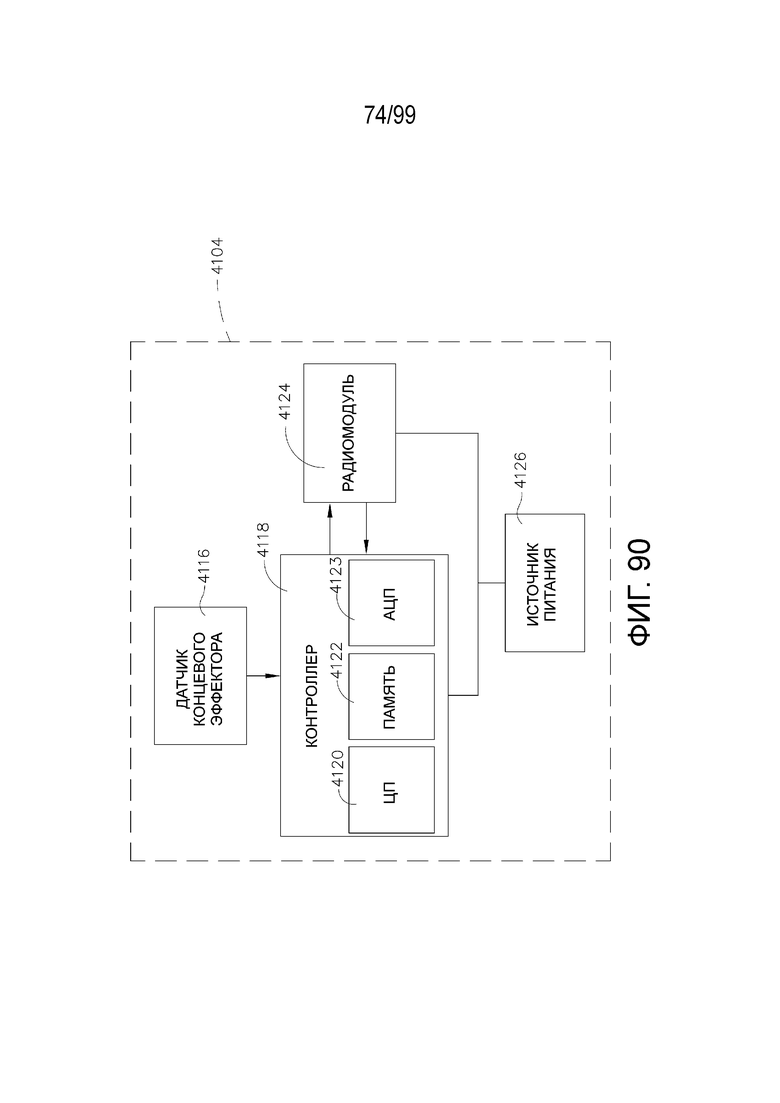
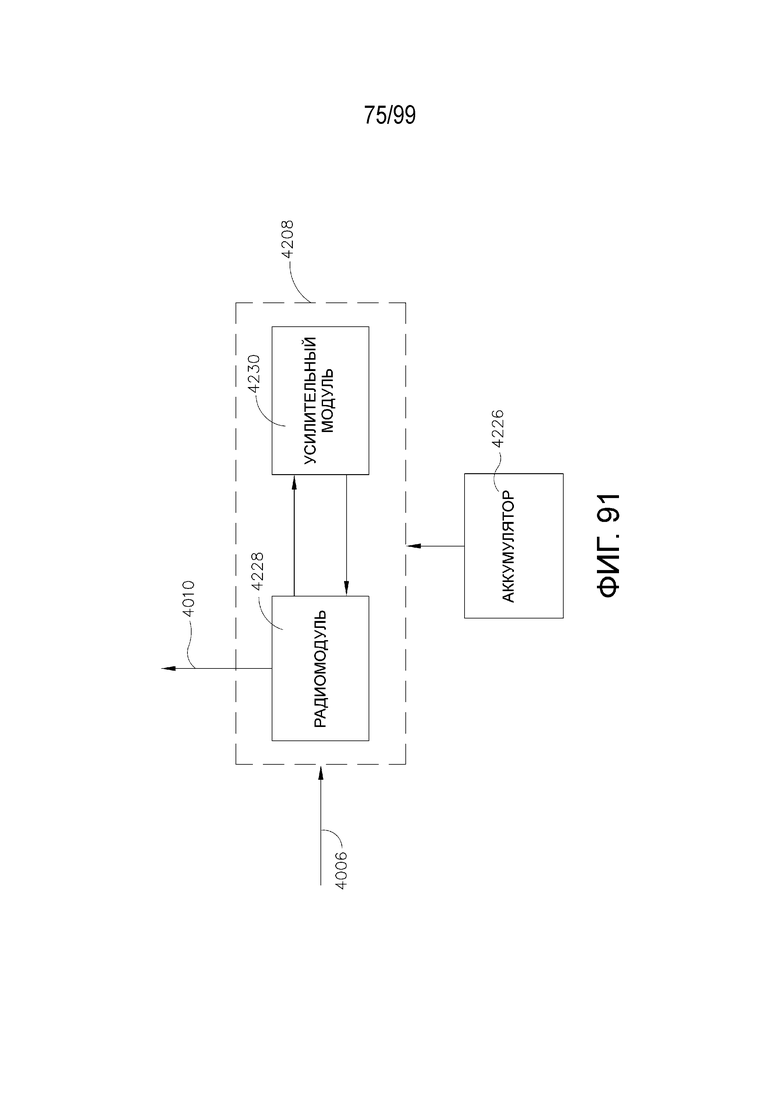
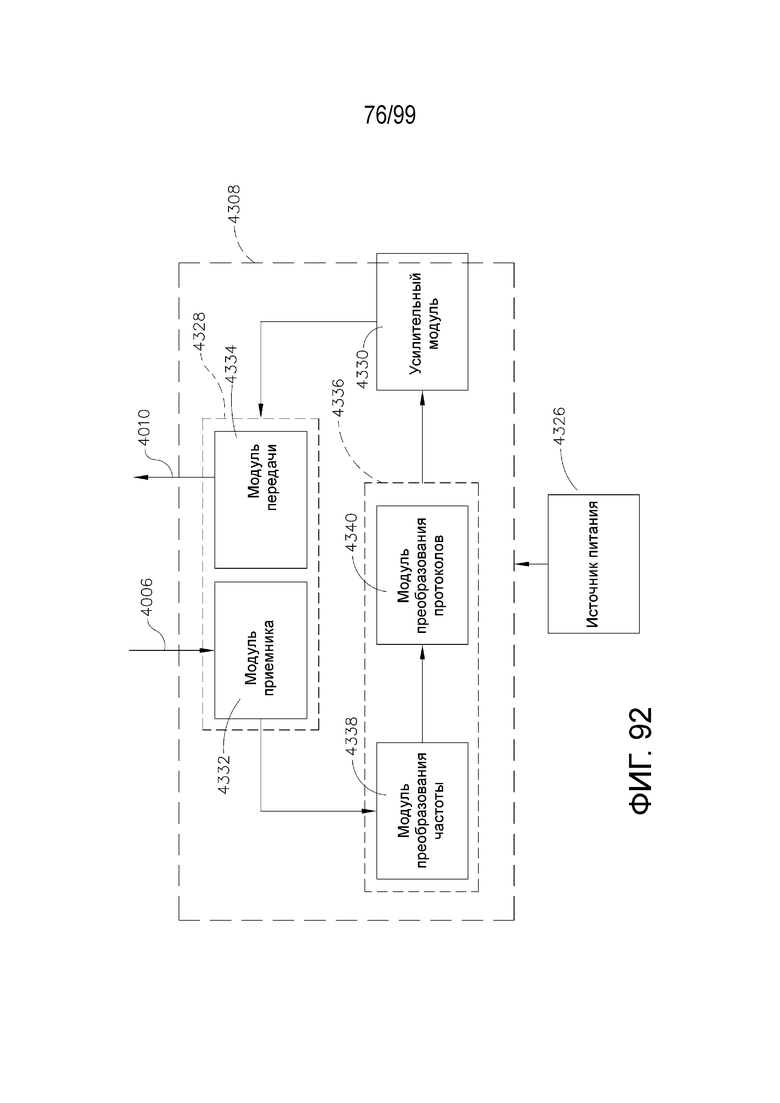
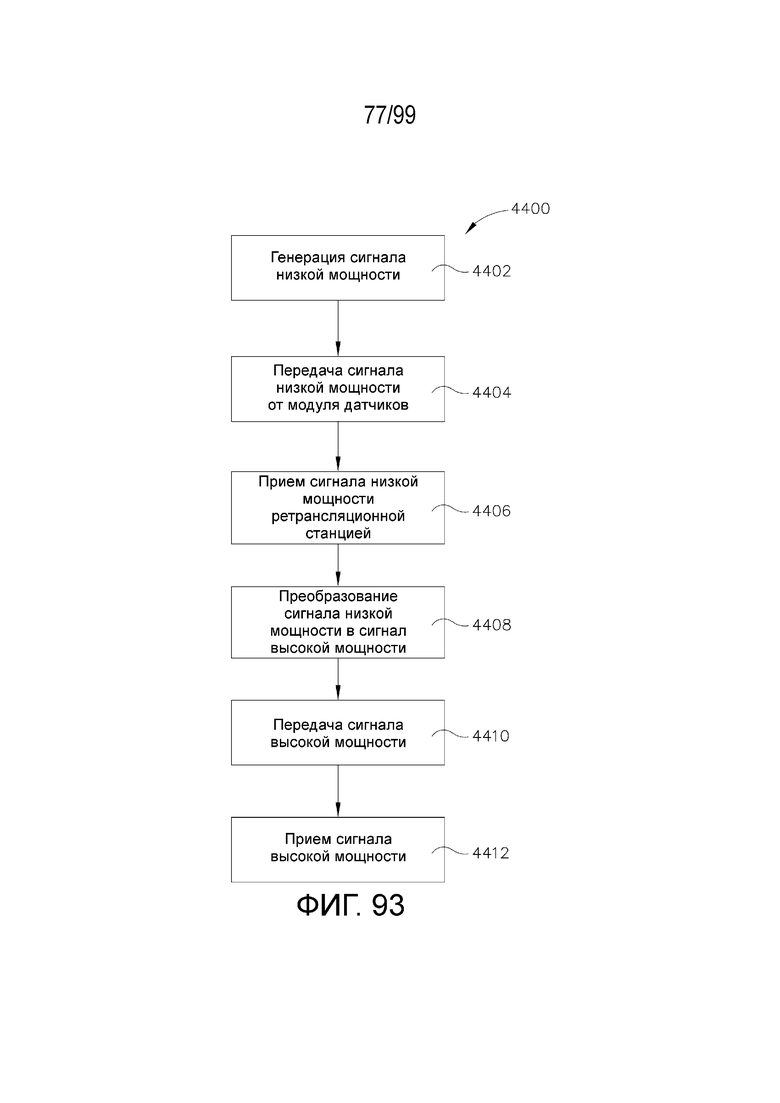
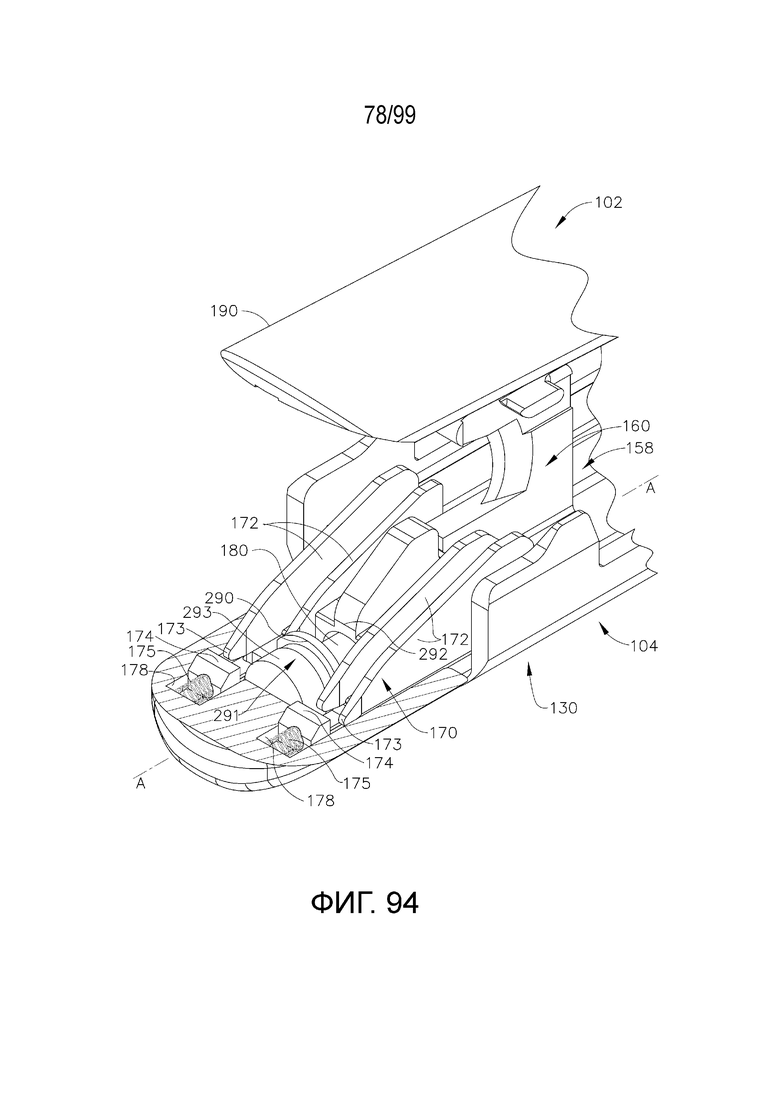
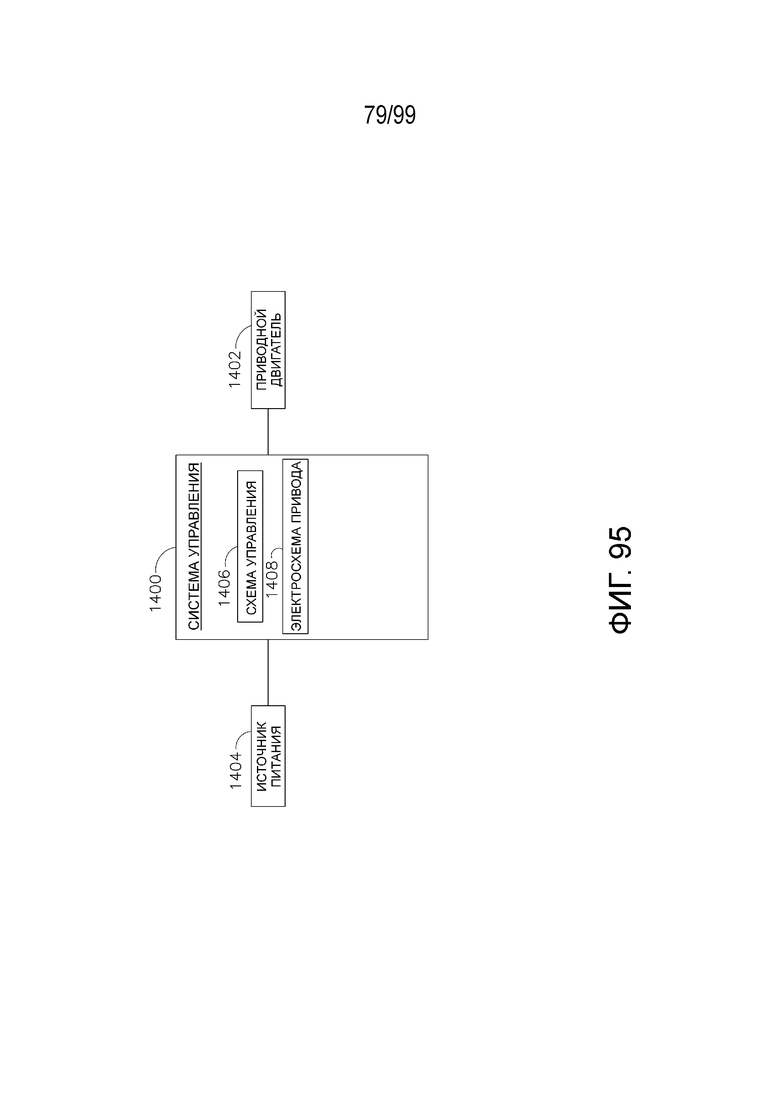
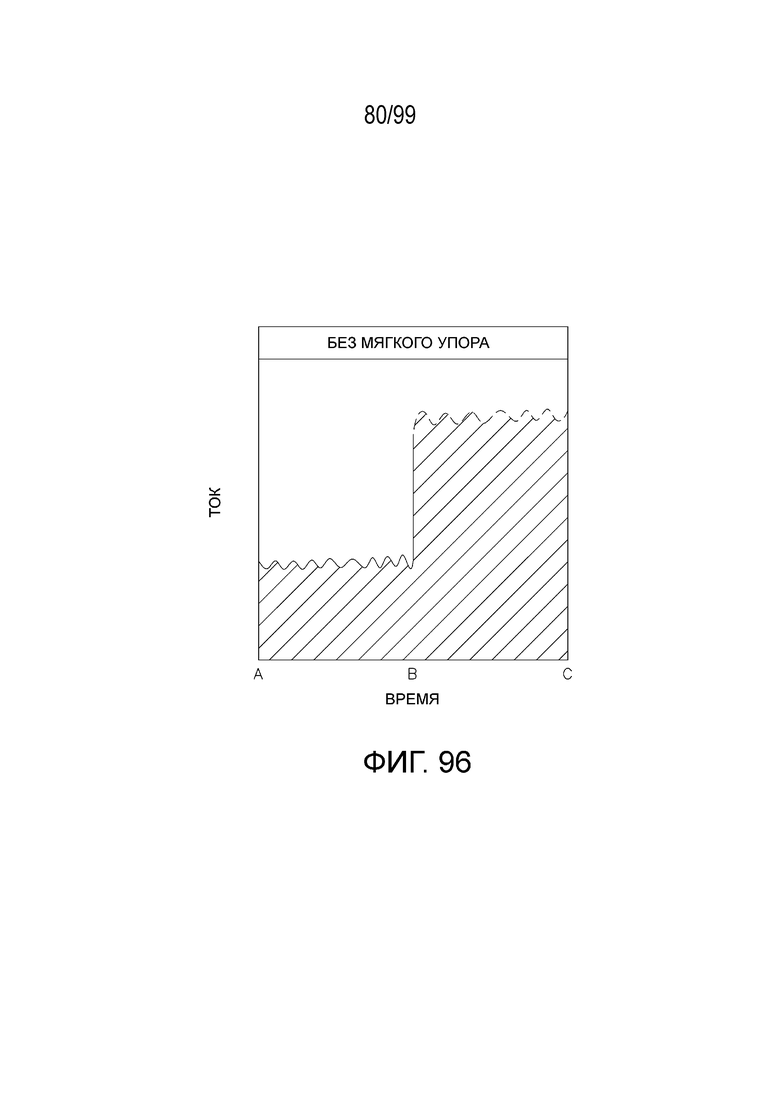
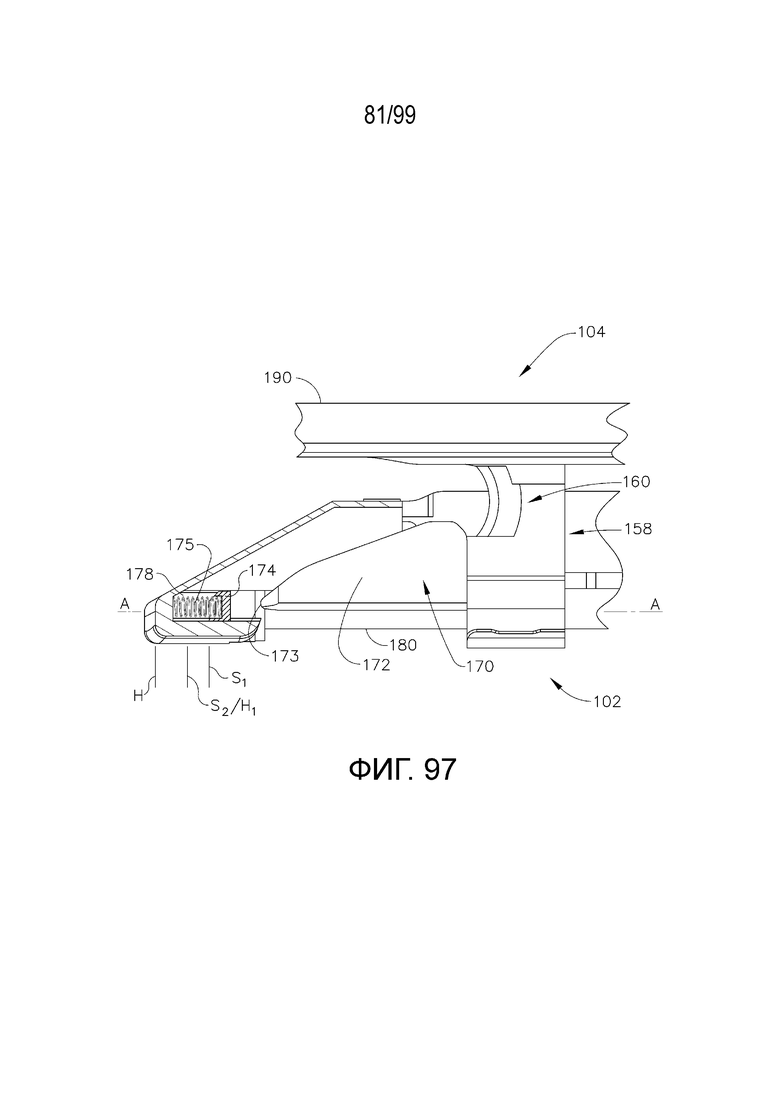
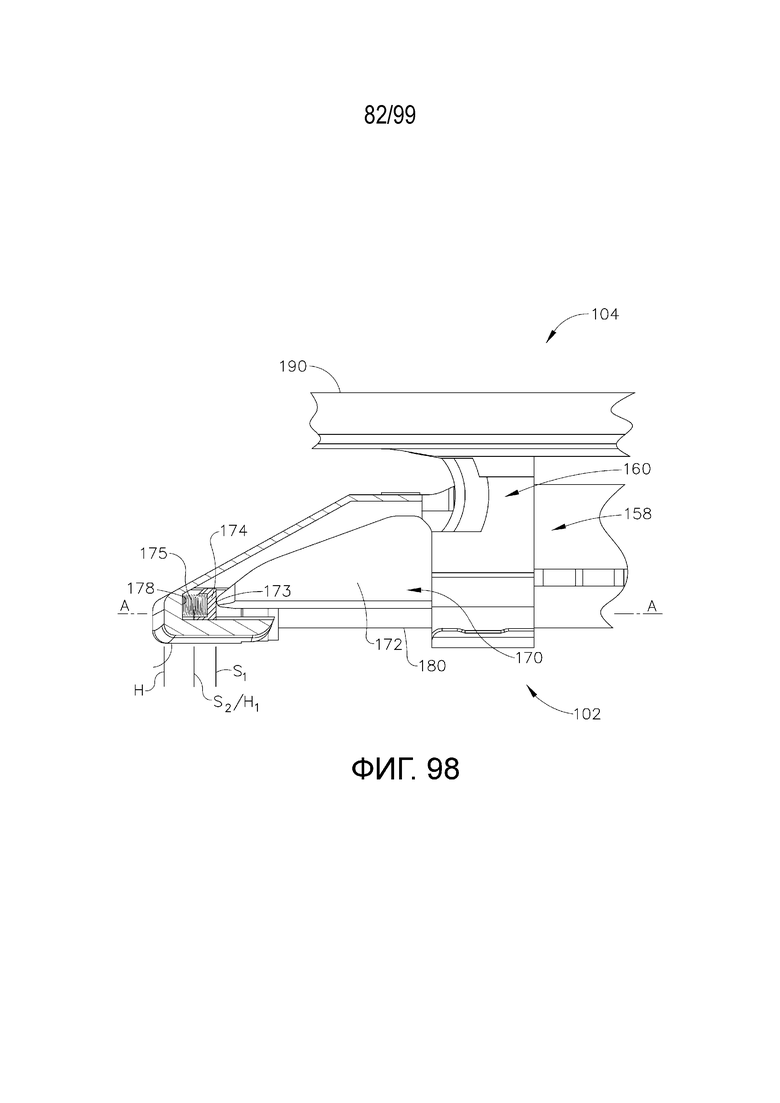
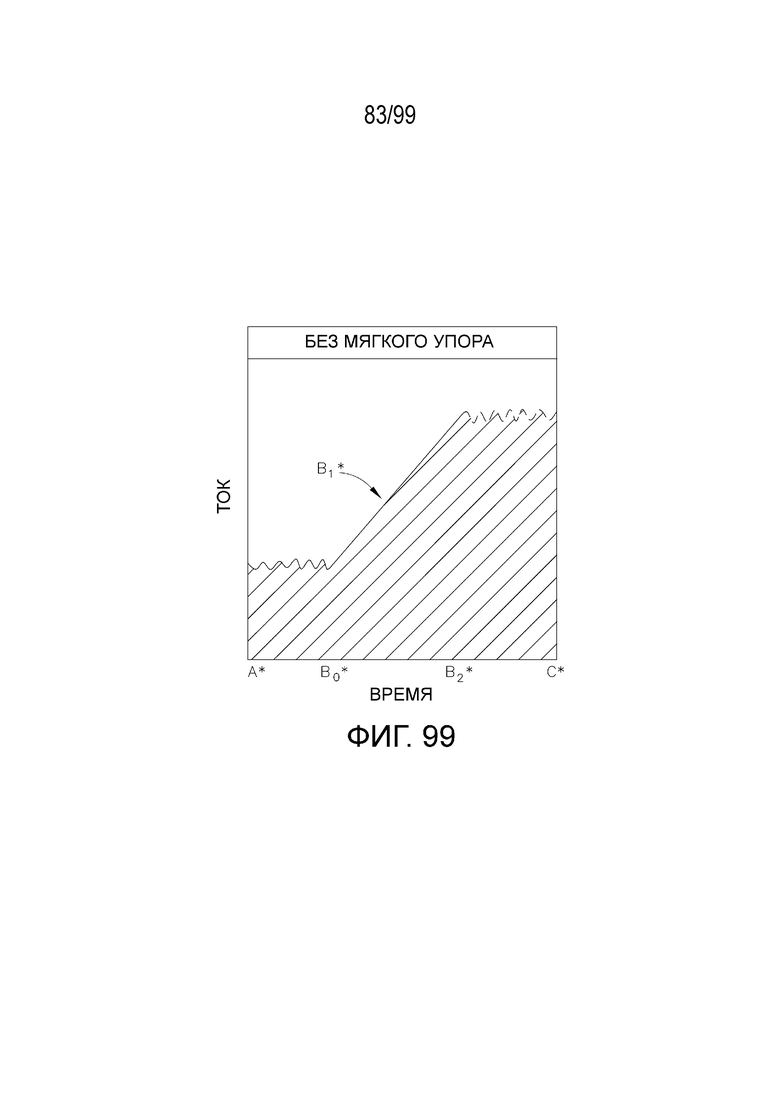
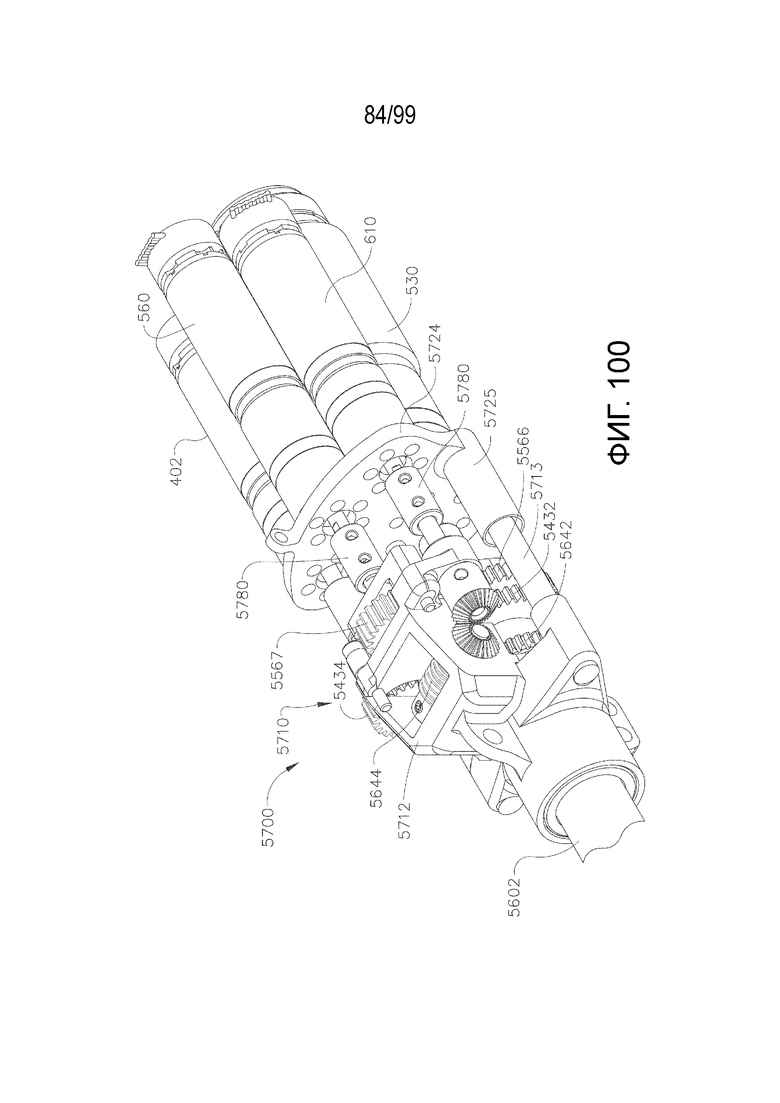
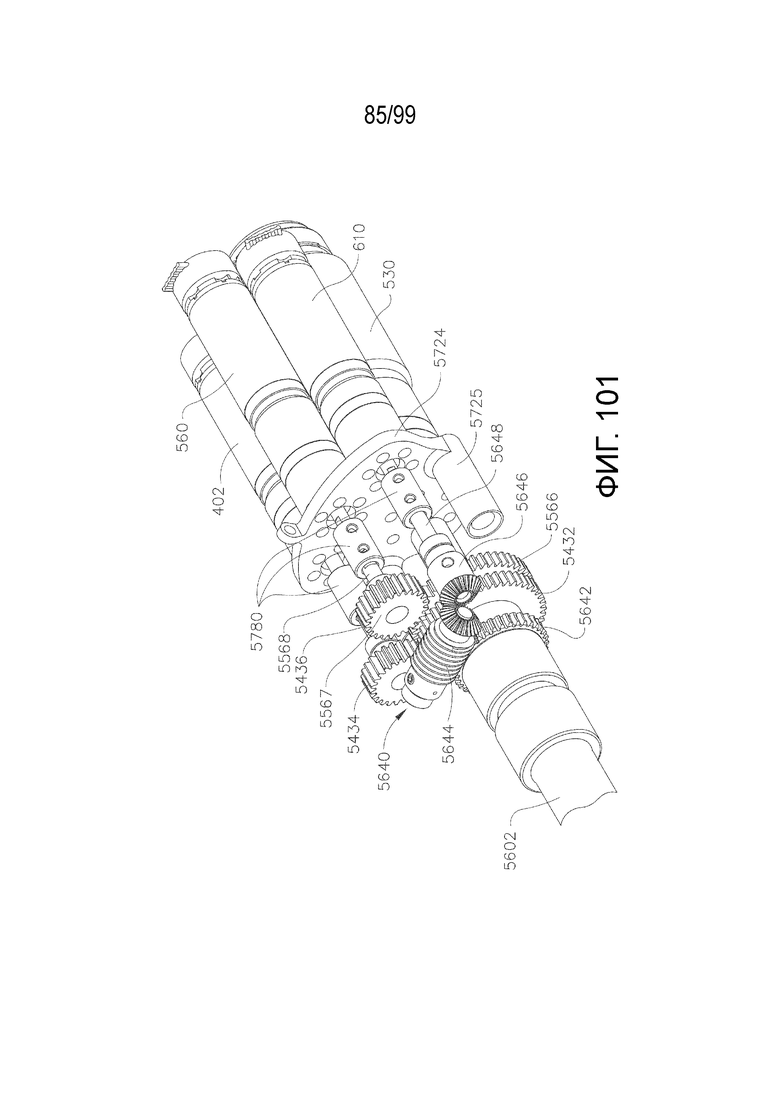
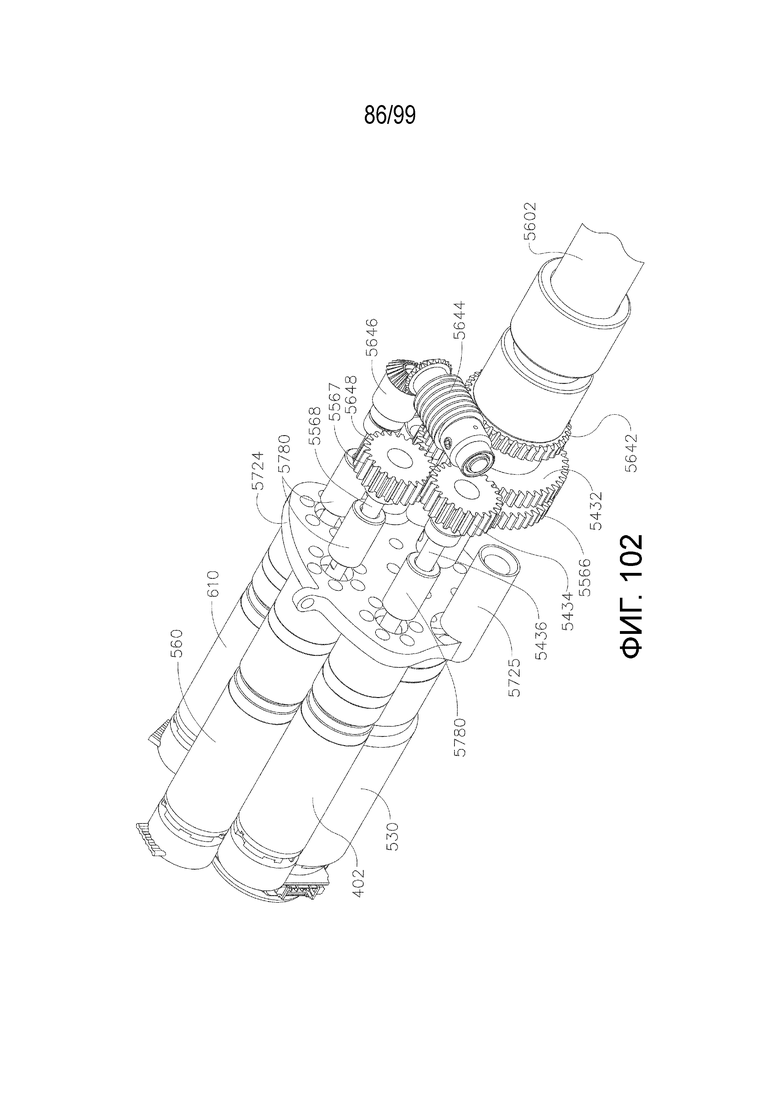
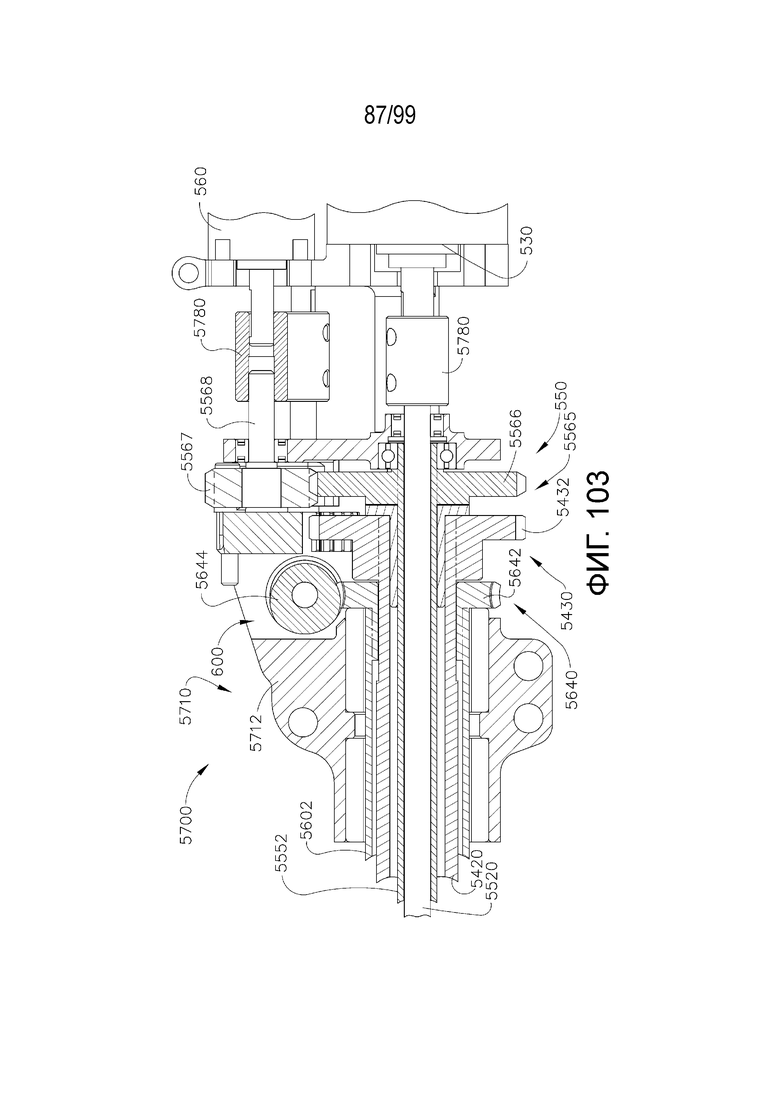
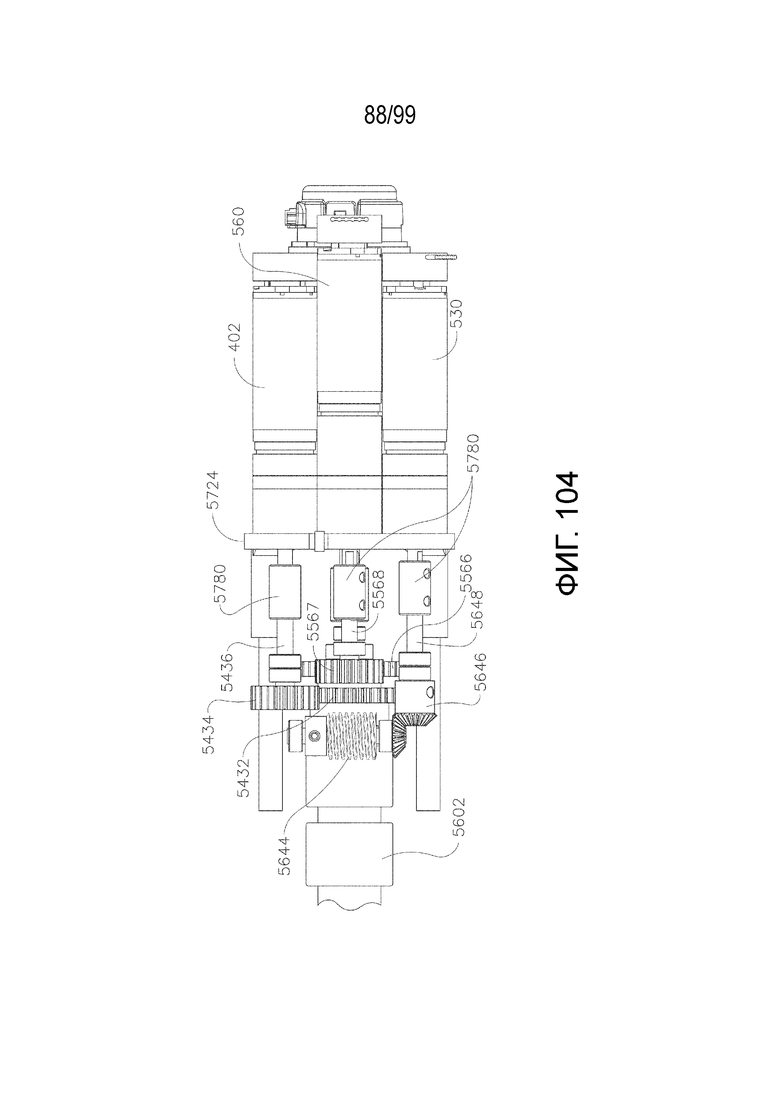
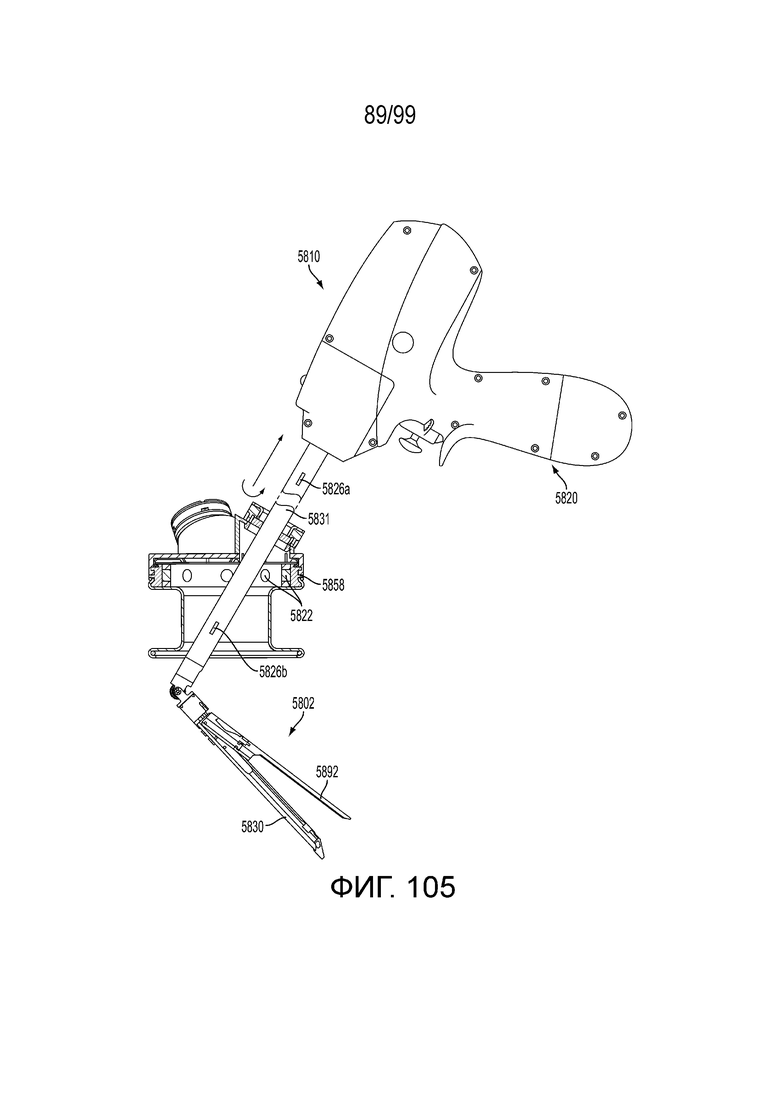
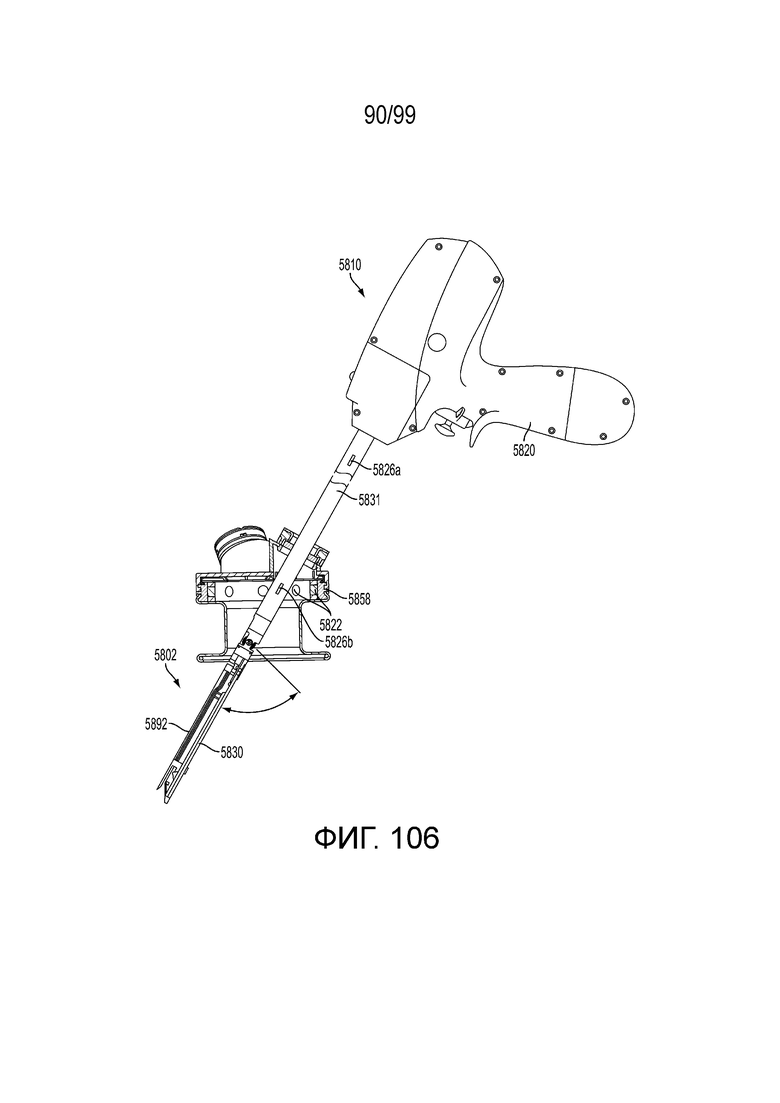
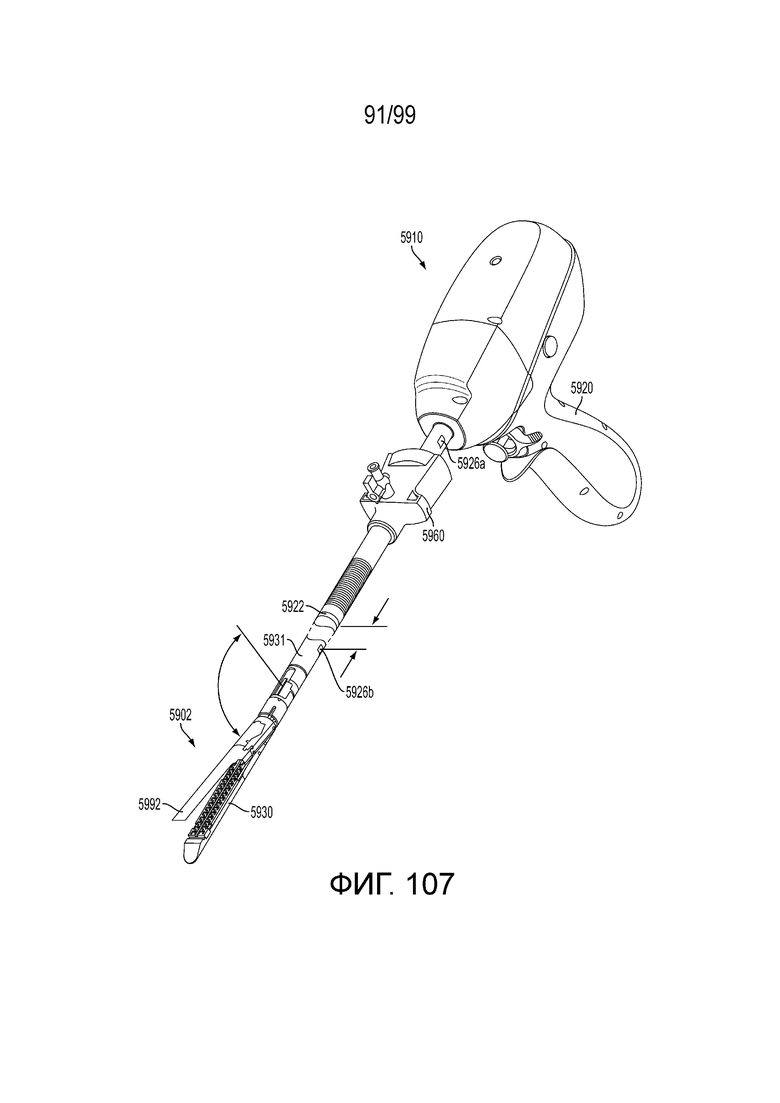
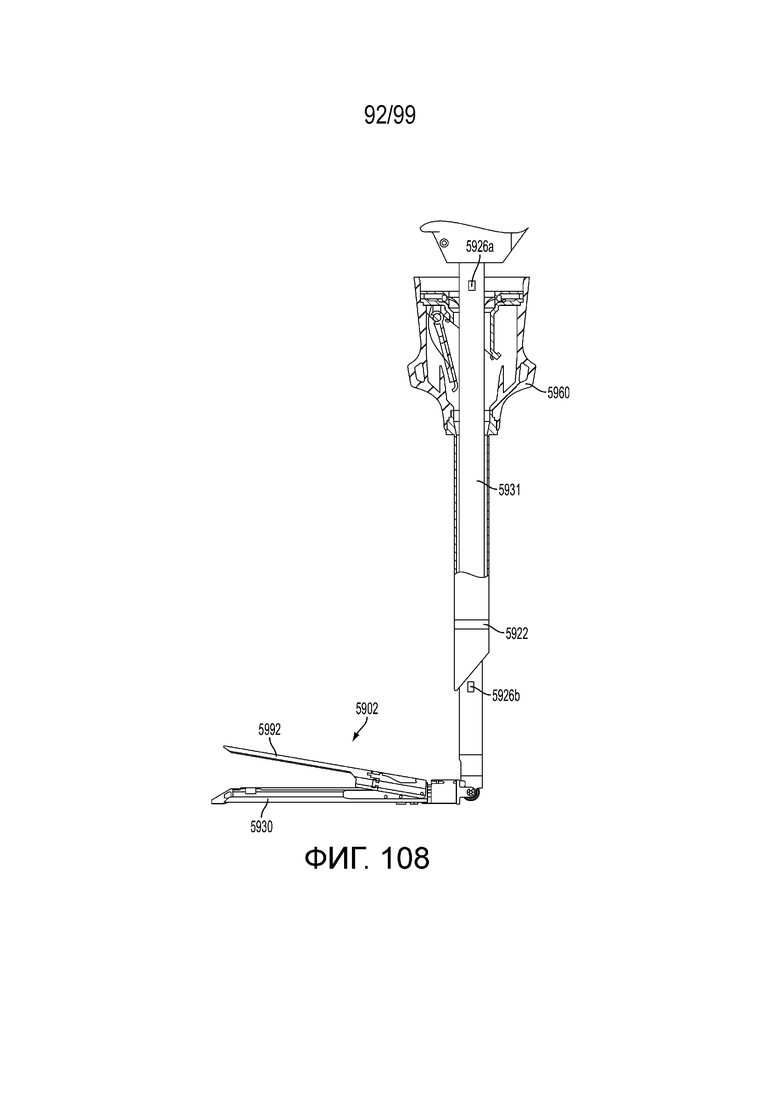
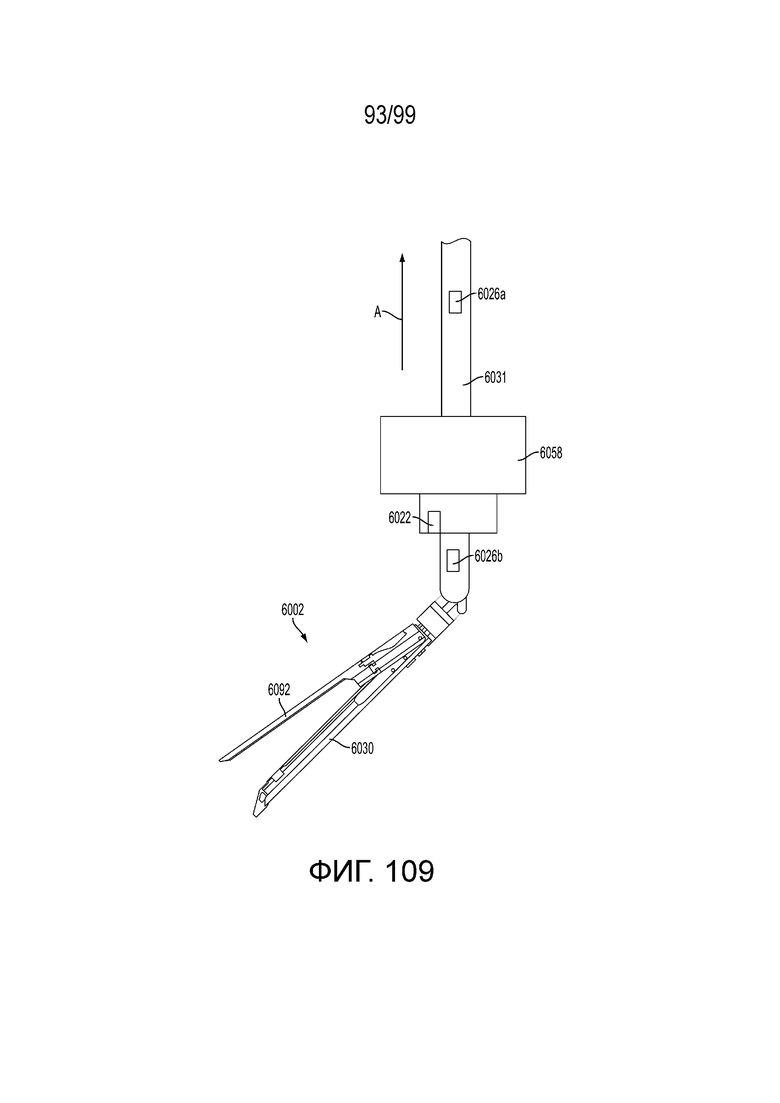
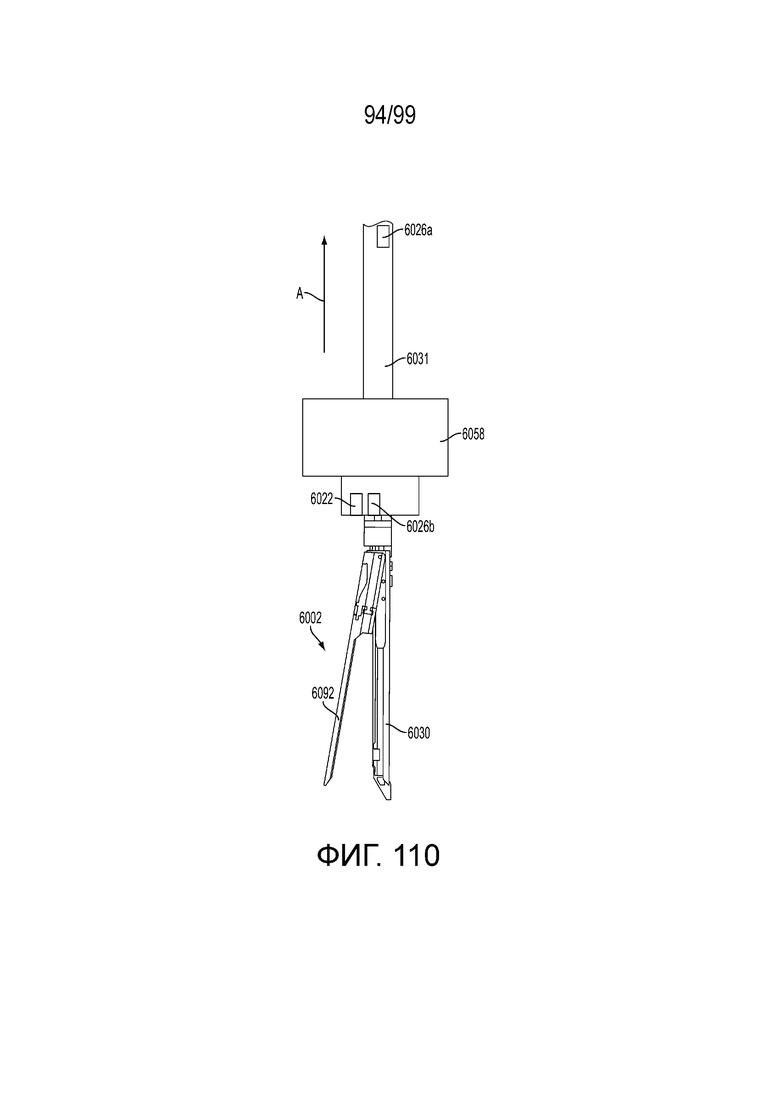
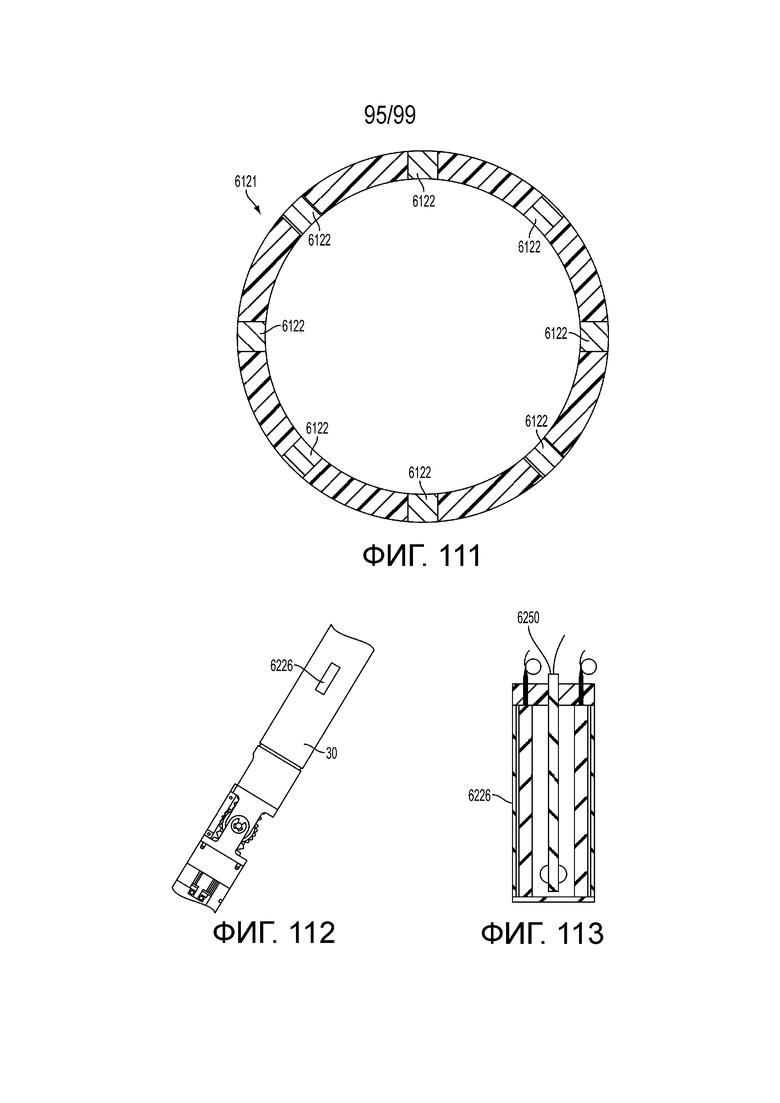
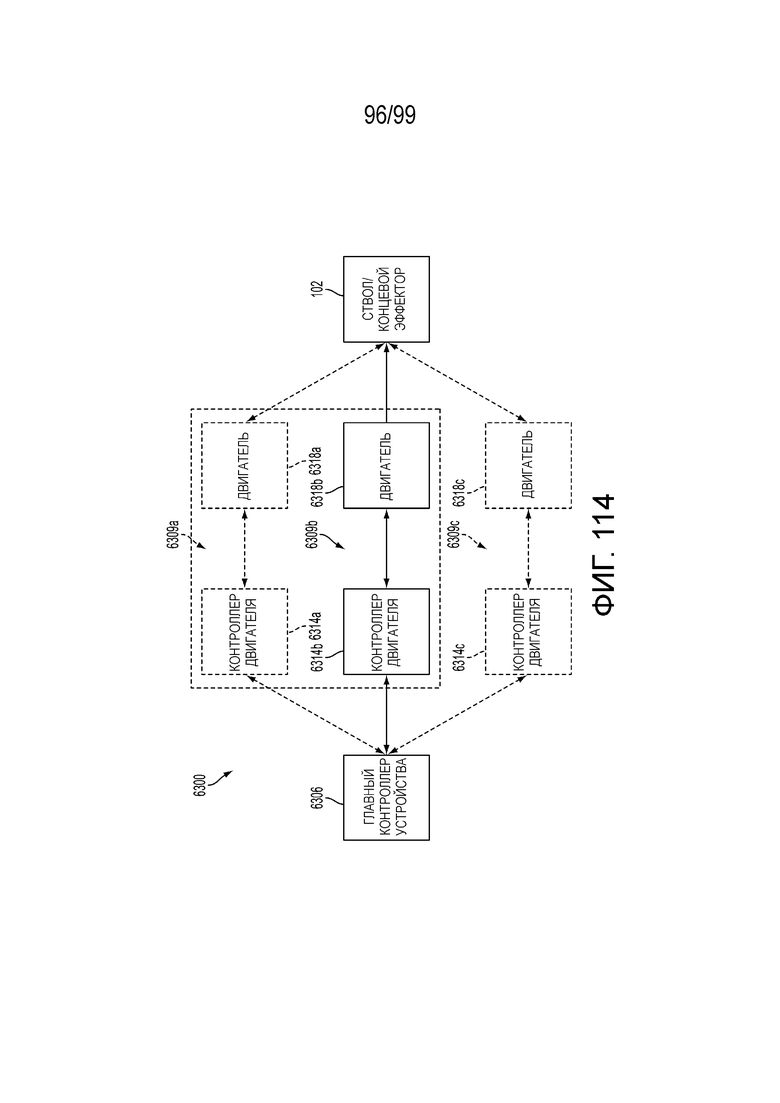
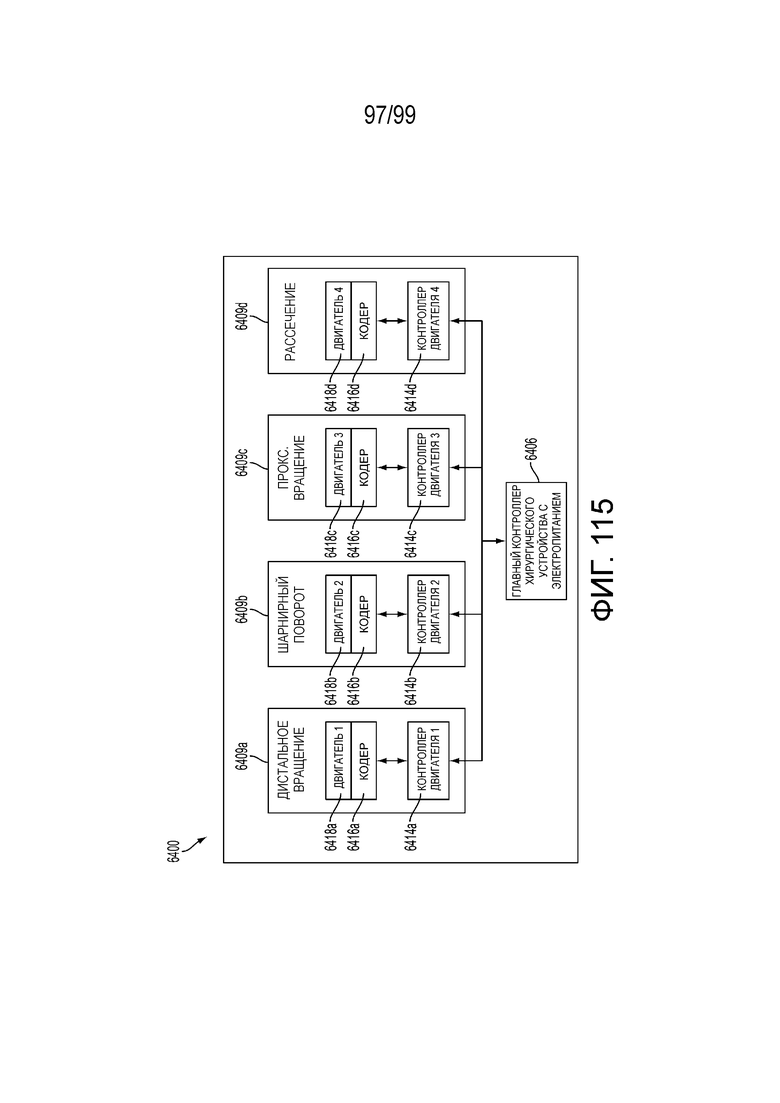
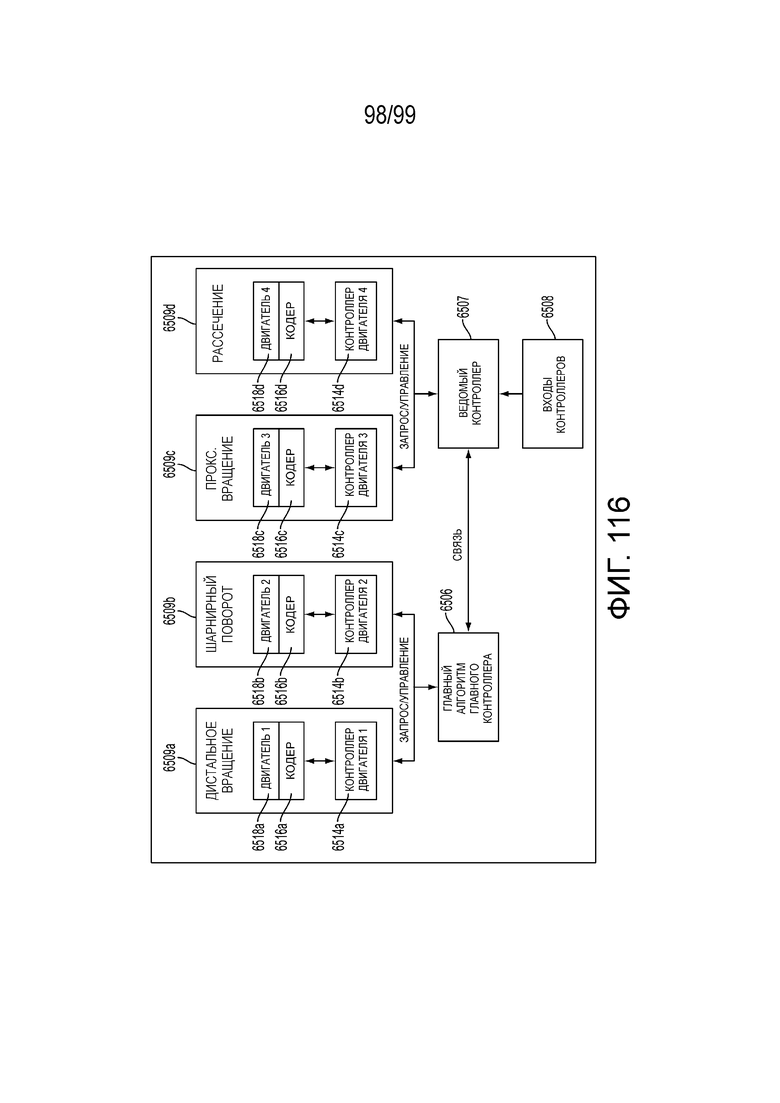
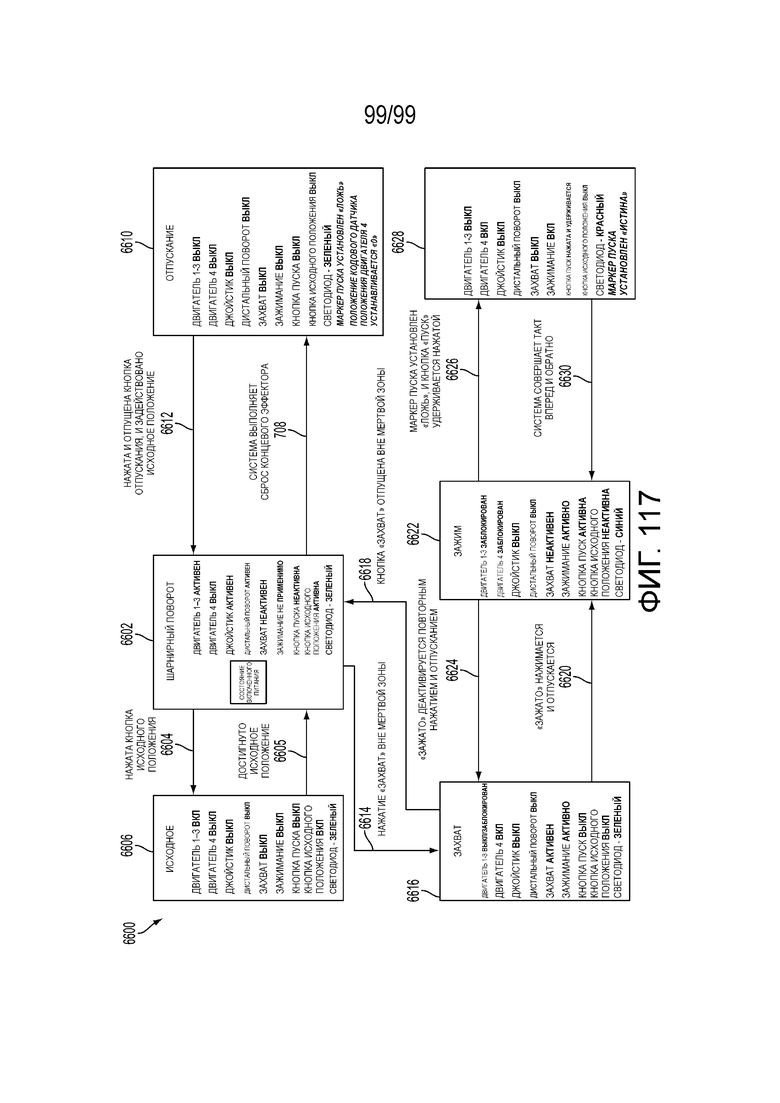
Изобретение относится к медицине и может быть использовано в хирургических инструментах. Шарнирное сочленение содержит проксимальную часть, соединенную с узлом удлиненного ствола хирургического инструмента. Дистальный участок сочленения соединен с возможностью перемещения с проксимальным участком сочленения и выполнен с возможностью стыковки с хирургическим концевым эффектором. Первый блок шестерен выполнен с возможностью стыковки с проксимальной частью пускового ствола узла удлиненного ствола и дистальный сегмент пускового ствола. Дистальный сегмент пускового ствола выполнен с возможностью функционального взаимодействия с хирургическим концевым эффектором для передачи поворотного пускового перемещения от проксимального пускового ствола к хирургическому концевому эффектору. Второй блок шестерен выполнен с возможностью стыковки с проксимальным участком поворотного ствола узла удлиненного ствола с целью передачи дистального поворотного управляющего перемещения на хирургический концевой эффектор. Хирургический концевой эффектор может поворачиваться относительно узла удлиненного ствола и обеспечивать возможность шарнирного поворота дистального участка сочленения относительно проксимального участка сочленения. 3 н. и 17 з.п. ф-лы, 117 ил.
1. Шарнирное сочленение для хирургического инструмента, включающего узел удлиненного ствола и приводную систему, выполненную с возможностью выработки и приложения множества поворотных управляющих перемещений к узлу удлиненного ствола, причем шарнирное сочленение содержит:
проксимальный участок сочленения, связанный с узлом удлиненного ствола;
дистальный участок сочленения, связанный с возможностью перемещения с проксимальным участком сочленения и выполненный с возможностью стыковки с хирургическим концевым эффектором;
первый блок шестерен, выполненный с возможностью функциональной стыковки с проксимальным участком пускового ствола узла удлиненного ствола и с дистальным пусковым стволом, выполненным с возможностью функциональной стыковки с хирургическим концевым эффектором, для передачи поворотного пускового перемещения от проксимального пускового ствола к хирургическому концевому эффектору с обеспечением возможности шарнирного поворота дистального участка сочленения относительно проксимального участка сочленения;
второй блок шестерен, выполненный с возможностью функциональной стыковки с проксимальным участком поворотного ствола узла удлиненного ствола для передачи поворотного управляющего перемещения в дистальном направлении на хирургический концевой эффектор для осуществления поворота хирургического концевого эффектора относительно узла удлиненного ствола с обеспечением возможности шарнирного поворота дистального участка сочленения относительно проксимального участка сочленения.
2. Сочленение по п. 1, в котором первый блок шестерен вложен во второй блок шестерен.
3. Сочленение по п. 1, в котором дистальный участок сочленения выполнен с возможностью стыковки с участком шарнирного ствола узла удлиненного ствола для приема перемещений шарнирного поворота.
4. Сочленение по п. 1, в котором дистальный участок сочленения выполнен с возможностью поворота относительно проксимального участка сочленения в результате приложения перемещений шарнирного поворота к участку шарнирного ствола узла удлиненного ствола.
5. Сочленение по п. 4, в котором шарнирное сочленение дополнительно содержит соединительное звено привода шарнира, выполненное с возможностью функционального соединения с дистальным участком сочленения, соединительное звено привода шарнира выполнено с возможностью стыковки с шарнирным стволом, причем перемещение соединительного звена ограничено осевым перемещением относительно дистального участка сочленения в ответ на приложение перемещений шарнирного поворота к шарнирному стволу.
6. Сочленение по п. 5, в котором соединительное звено привода шарнира выполнено с возможностью взаимодействия с шарнирным стволом посредством резьбового соединения.
7. Сочленение по п. 1, в котором дистальный участок сочленения выполнен с возможностью стыковки с поворотом с узлом соединительного элемента, выполненного с возможностью разъемного соединения с хирургическим концевым эффектором.
8. Сочленение по п. 7, в котором участок второго блока шестерен выполнен с возможностью стыковки с узлом соединительного элемента для осуществления вращения узла соединительного элемента относительно дистального участка сочленения в результате приложения поворотного управляющего перемещения в дистальном направлении к проксимальному участку поворотного ствола узла удлиненного ствола.
9. Сочленение по п. 7, дополнительно включающее узел блокировки на узле соединительного элемента для блокировки с возможностью высвобождения хирургического концевого эффектора с узлом блокировки.
10. Сочленение по п. 1, в котором дистальный сегмент пускового ствола выполнен с возможностью передачи поворотного пускового перемещения на приводной винт концевого эффектора, функционально поддерживаемый в хирургическом концевом эффекторе, с обеспечением вращения хирургического концевого эффектора относительно шарнирного сочленения.
11. Шарнирное сочленение для хирургического инструмента, включающего узел удлиненного ствола и приводную систему, выполненную с возможностью выработки и приложения множества поворотных управляющих перемещений к узлу удлиненного ствола, причем шарнирное сочленение содержит:
проксимальную скобу, связанную с узлом удлиненного ствола;
дистальную скобу, шарнирно соединенную штифтом с проксимальной скобой, для избирательного вращательного перемещения относительно нее вокруг оси шарнира, по существу перпендикулярной оси ствола, образованной узлом удлиненного ствола;
первый блок шестерен, поддерживаемый в области шестерен, образованной между проксимальной и дистальной скобами так, что участки первого блока шестерен не проходят радиально за пределы любого участка шарнирного сочленения, первый блок шестерен выполнен с возможностью функциональной стыковки с проксимальным участком пускового ствола узла удлиненного ствола и дистальным пусковым стволом, выполненным с возможностью функциональной стыковки с хирургическим концевым эффектором для передачи поворотного пускового перемещения от проксимального пускового ствола к хирургическому концевому эффектору с обеспечением возможности вращательного перемещения дистальной скобы относительно проксимальной скобы; и
второй блок шестерен, поддерживаемый в области шестерен так, что участки первого блока шестерен не проходят радиально за пределы любого участка шарнирного сочленения, причем второй блок шестерен выполнен с возможностью функциональной стыковки с проксимальным участком поворотного ствола узла удлиненного ствола для передачи поворотного управляющего перемещения в дистальном направлении на хирургический концевой эффектор для осуществления поворота хирургического концевого эффектора относительно узла удлиненного ствола с обеспечением возможности шарнирного поворота дистальной скобы относительно проксимальной скобы.
12. Сочленение по п. 11, в котором первый блок шестерен вложен во второй блок шестерен так, что ни один из участков первого блока шестерен не проходит радиально за пределы любого участка второго блока шестерен.
13. Сочленение по п. 11, в котором первый блок шестерен содержит:
проксимальную коническую шестерню приводного ствола, прикрепленную к проксимальному участку пускового ствола узла;
передаточную шестерню приводного ствола во взаимодействии с зацеплением с проксимальной конической шестерней приводного ствола;
и дистальную коническую шестерню приводного ствола во взаимодействии с зацеплением с передаточной шестерней приводного ствола и присоединенную к дистальному пусковому стволу, и причем второй блок шестерен содержит:
входную конусную шестерню, связанную с проксимальным участком поворотного ствола;
передаточную шестерню поворотного ствола во взаимодействии с зацеплением с входной конусной шестерней; и
выходную конусную шестерню во взаимодействии с зацеплением с передаточной шестерней поворотного ствола, связанную с узлом соединительного элемента, выполненного с возможностью стыковки с поворотом с участком дистальной скобы и с возможностью соединения с хирургическим концевым эффектором.
14. Сочленение по п. 11, в котором дистальная скоба выполнена с возможностью стыковки с участком шарнирного ствола узла удлиненного ствола для приема перемещений шарнирного поворота.
15. Сочленение по п. 14, дополнительно содержащее:
соединительное звено привода шарнира, выполненное с возможностью стыковки с шарнирным стволом, причем перемещения соединительного звена ограничены осевым перемещением относительно шарнирного сочленения в ответ на приложение перемещений шарнирного поворота к шарнирному стволу; и
шарнирную рейку, связанную с дистальной скобой и соединительным звеном привода шарнира и проходящую между ними.
16. Сочленение по п. 11, в котором дистальный приводной ствол функционально поддержан в узле соединительного элемента, выполненного с возможностью стыковки с поворотом с дистальной скобой, дистальный приводной ствол выполнен с возможностью взаимодействия с высвобождением с приводным винтом концевого эффектора хирургического концевого эффектора при соединении хирургического концевого эффектора с узлом соединительного элемента.
17. Хирургический инструмент, содержащий:
приводную систему, выполненную с возможностью выработки множества поворотных управляющих перемещений;
узел удлиненного ствола, выполненный с возможностью функциональной стыковки с приводной системой; причем узел удлиненного ствола содержит:
сегмент внешнего ствола, выполненный с возможностью функциональной стыковки с приводной системой для приема от нее управляющих перемещений поворота в дистальном направлении;
шарнирный ствол, выполненный с возможностью функциональной стыковки с приводной системой для приема от нее поворотных перемещений шарнирного поворота; и
проксимальный сегмент пускового ствола, выполненный с возможностью функционального взаимодействия с приводной системой для приема от нее поворотных пусковых перемещений, и причем хирургический инструмент дополнительно содержит:
шарнирное сочленение, дополнительно содержащее:
проксимальную скобу, связанную с узлом удлиненного ствола;
дистальную скобу, шарнирно соединенную штифтом с проксимальной скобой для избирательного вращательного перемещения относительно нее вокруг оси шарнира, по существу перпендикулярной оси ствола, образованной узлом удлиненного ствола;
узел соединительного элемента, выполненный с возможностью стыковки с поворотом с дистальной скобой и выполненный с возможностью прикрепления к хирургическому концевому эффектору;
дистальный сегмент пускового ствола, функционально поддерживаемый узлом соединительного элемента и выполненный с возможностью стыковки с участком приводного ствола хирургического концевого эффектора;
первый блок шестерен, выполненный с возможностью функциональной стыковки с проксимальным сегментом пускового ствола и с дистальным сегментом пускового ствола для передачи поворотных пусковых перемещений от проксимального сегмента пускового ствола к дистальному сегменту пускового ствола с обеспечением возможности избирательного вращения дистальной скобы относительно проксимальной скобы;
второй блок шестерен, выполненный с возможностью функциональной стыковки с проксимальным поворотным стволом для передачи управляющих перемещений поворота в дистальном направлении на узел соединительного элемента с обеспечением возможности избирательного вращения дистальной скобы относительно проксимальной скобы; и
соединительное звено привода шарнира, стыкующееся с шарнирным стволом и дистальной скобой, причем его перемещения ограничены осевым перемещением относительно шарнирного сочленения в ответ на приложение перемещений шарнирного поворота к шарнирному стволу.
18. Инструмент по п. 17, в котором первый блок шестерен вложен во второй блок шестерен.
19. Инструмент по п. 17, в котором приводная система функционально поддержана в узле рукоятки, выполненной с возможностью функционального соединения с узлом удлиненного ствола.
20. Инструмент по п. 17, в котором приводная система содержит участок роботизированной системы.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| EP 1736105 A1, 27.12.2006 | |||
| Хирургический сшивающий аппарат для наложения линейных швов | 1980 |
|
SU1042742A1 |

