Область техники
Настоящее изобретение относится к способу измерения или к способу управления для измерения (измерения в организме) или управления, в живом состоянии, динамическими жизнедеятельностями, изменяющимися с высокой скоростью в живом объекте, например, животном, в том числе, человеке, или растении или их изменениями бесконтактным и неинвазивным способом.
Уровень техники
Примером динамических жизнедеятельностей, изменяющийся с высокой скоростью в живом объекте, является деятельность нервной системы. Способы измерения внутримозговой активности включают в себя анализ содержания кислорода в крови с использованием света в ближнем инфракрасном диапазоне (в дальнейшем именуемый "традиционный метод 1") и анализ содержания кислорода в крови способом функционального магнитно-резонансного формирования изображения (фМРТ) (в дальнейшем именуемый "традиционный метод 2"), которые являются иллюстративными примерами традиционных методов.
Согласно традиционному методу 1, концентрация кислорода в крови измеряется с использованием изменения спектра поглощения света в ближнем инфракрасном диапазоне для оксигемоглобина и дезоксигемоглобина (см. непатентный документ 1). Таким образом, оксигемоглобин, который является конкретным гемоглобином связанным с молекулой кислорода, имеет максимальное поглощение на длине волны 930 нм, и дезоксигемоглобин, который является другим конкретным гемоглобином, отделенным от молекулы кислорода, имеет максимальное поглощение на длинах волны 760 нм и 905 нм. Голова освещается светом каждой из длин волны 780 нм, 805 нм и 830 нм в качестве источника света (полупроводникового лазера) для измерения, и измеряются изменения интенсивности соответствующих пучков пропущенного света. Таким образом, удается получить сигналы, относящиеся к участкам коры головного мозга, расположенным на глубине 3-4 см от поверхности головы.
Кроме способа, предусматривающего использование света в ближнем инфракрасном диапазоне, существует способ, предусматривающий использование ядерного магнитного резонанса для осуществления измерения концентрации кислорода в крови. Таким образом, при переходе от поглощения молекул кислорода к освобождению молекул кислорода, электронные орбитали в молекулах гемоглобина изменяются, что изменяет магнитную восприимчивость и сокращает время релаксации Т2 МР.
Согласно традиционному методу 2, положение (участок активация) в нервной системе, где скорость потребления кислорода увеличена, оценивается с использованием этого явления (см. непатентные документы 2 и 3). При использовании этого способа, результат измерения можно получить посредством компьютерного процесса и распределение концентрации кислорода в крови в голове может проявляться трехмерным образом.
При этом, в качестве способа управления динамическими жизнедеятельностями в живом объекте, известно медицинское лечение.
Библиография
Непатентные источники
NPL 1: Yukihiro Ozaki/Satoshi Kawata: Kinsekigaibunkouhou (Gakkai Shuppan Center, 1996) Section 4.6
NPL 2: Takashi Tachibana: Nou Wo Kiwameru Noukenkyu Saizensen (Asahi Shimbun Publishing, 2001) p. 197
NPL 3: Masahiko Watanabe: Nou Shinkei Kagaku Nyumon Koza Gekan (Yodosha, 2002) p. 188
Сущность изобретения
Техническая проблема
Однако, согласно традиционным методам 1 и 2, временное разрешение и пространственное разрешение для измерения активного состояния нейрона низки.
Для облегчения понимания проблемы, далее первоначально объясняется, что анализ содержания кислорода в крови является косвенным измерением. Измерение концентрации кислорода в крови базируется на подразумеваемой гипотезе, состоящей в том, что "при активации нейрона, гемоглобин должен деоксигенироваться для снабжения энергией, необходимой для его активности".
Однако, как описано в главе 4 В. Alberts et. al: Essential Cell Biology (Garland Publishing, Inc., 1998), энергия, выделяющаяся во время гидролиза АТФ (аденозинтрифосфата) с образованием АДФ (аденозиндифосфата), используется для обеспечения активности нейрона.
АДФ вырабатывается в процессе окисления ацетил-СоА, происходящем в митохондриях, существующих в нейроне. Кроме того, нейрон непосредственно не контактирует с кровеносными сосудами, и молекулы кислорода поступают в нейрон через глиальные клетки, проникающие между нейроном и кровеносными сосудами. Поступление молекул кислорода сопряжено с активностью в нейроне посредством такого сложного действия.
Соответственно, считается, что явление изменения (снижения) концентрации кислорода в крови происходит только вокруг локального участка, где одновременно активируется большой количество клеток в нервной системе. По этой причине, в традиционных методах 1 и 2, трудно наблюдать мгновенные изменения нескольких клеток в нервной системе, например кратковременные потенциалы действия от нескольких нейронов. Таким образом, поскольку можно одновременно обнаруживать только локальный участок, где активируется большое количество клеток, теоретически трудно повысить пространственное разрешение. Таким образом, в традиционных методах 1 и 2, активность нейрона наблюдается не непосредственно, но опосредованно, что снижает точность измерения.
Временное разрешение
Согласно отчету Nikkei Electronics (Nikkei BP), стр. 44, опубликованному 3 мая 2010 г., уровень гемоглобина в крови который изменяется примерно через 5 с после активизации нейрона, обнаруживается в соответствии с традиционным методом 1. Таким образом, при обнаружении на основании традиционного метода 1, возникает большая задержка от инициирования активности нейрона.
Кроме того, согласно традиционному методу 2, использование эффекта BOLD (зависимость от уровня оксигенации крови) приводит к ситуации, аналогичной описанной выше. Эффект BOLD состоит в следующем: когда нейронная активность возрастает вследствие активности головного мозга, прежде всего, возрастает потребление кислорода. В результате, концентрация дезоксигемоглобина немного увеличивается, и несколько секунд спустя, мозговой кровоток в капиллярах в ближних участках быстро возрастает, приводя к подаче большого количества кислорода, которое значительно превышает потребление кислорода. В результате, быстро возрастает концентрация оксигемоглобина, и, следовательно, сигналы фМРТ усиливаются, и их время релаксации увеличивается. Таким образом, даже в традиционном методе 2, обнаружение увеличения концентрации оксигемоглобина требует нескольких секунд после активизации нейрона вследствие активности головного мозга, и, таким образом, традиционный метод 2 также приводит к задержке в несколько секунд для обнаружения, аналогично традиционному методу 1.
Таким образом, в связи с тем, что традиционные методы 1 и 2 предусматривают измерение концентрации кислорода в крови, уровень гемоглобина в крови изменяется с задержкой после инициирования активности нейрона. В связи с этим, временное разрешение в любом из традиционных методов 1 и 2 составляет около 5 с, то есть является очень низким.
Пространственное разрешение
Пространственное разрешение традиционного метода 1 определяется расстоянием между источником света и фотодетектором для измерения изменения интенсивности света, проходящего через голову (см. стр. 43 отчета Nikkei Electronics (Nikkei BP), опубликованного 3 мая 2010 г. ). С уменьшением расстояния между источником света и фотодетектором, уменьшается глубина проникновения измерительного пучка в голову.
Соответственно, если расстояние между источником света и фотодетектором сокращается для увеличения пространственного разрешения, становится невозможным измерение нервной системы в голове. Как описано выше, в случае, когда измерение осуществляется на участке внутри головы, находящемся на глубине от 3 до 4 см от поверхности головы, источник света должен располагаться на расстоянии от фотодетектора около 3 см, и, таким образом, пространственное разрешение составляет около 3 см.
С другой стороны, пространственное разрешение в случае традиционного метода 2 определяется длиной волны магнитного поля транзакции обнаружения (электромагнитной волны) согласно теории дифракции электромагнитной волны, и длина волны этого магнитного поля транзакции обнаружения определяется напряженностью приложенного магнитного поля постоянного тока. Даже если напряженность магнитного поля постоянного тока увеличивается с использованием сверхпроводящего магнита, существует теоретический верхний предел пространственного разрешения вследствие технического ограничения. Согласно стр. 42 вышеупомянутого отчета Nikkei Electronics (Nikkei BP), опубликованного 3 мая 2010 г., пространственное разрешение, в лучшем случае, составляет несколько мм, даже в устройстве фМРТ, имеющим наивысшее пространственное разрешение.
Ниже описана глубина проникновения в живой объект в связи с традиционным методом 1. Цвет кожи человека говорит о том, что видимый свет легко совершает диффузное отражение на поверхности живого объекта и с трудом проникает в живой объект. В описанных выше примерах, свет с длиной волны 780 нм, свет с длиной волны 805 нм и свет с длиной волны 830 нм используются как измерительные пучки. Свет с длиной волны 830 нм, который имеет наибольшую длину волны из них, является светом в ближнем инфракрасном диапазоне, но вблизи видимого участка спектра. Таким образом, глубина его проникновения в живой объект также невелика. В результате, как описано ранее, можно измерять только сигнал, относящийся к участку коры в головном мозге, в лучшем случае, расположенному на глубине от 3 до 4 см от поверхности головы.
В связи с этим, задачей настоящего изобретения является обеспечение способа и пр., который позволяет измерять активное состояние в живом объекте при попытке повысить пространственное разрешение и временное разрешение.
При этом в медицинском лечении, которое называется способом управления жизнедеятельностью, трудно эффективно управлять только конкретной областью в живом объекте. Дело в том, что препарат, вводимый через рот или посредством инъекции, циркулирует по телу и разносится по телу. Таким образом, даже лекарственное лечение, например, в терапевтических целях, не только приводит к относительному снижению количества препарата, работающего на целевой части, подлежащей лечению (управлению), но и к побочным эффектам вследствие действий других лекарств на другие части, кроме целевой части, подлежащей лечению (управлению).
В связи с этим, настоящее изобретение также призвано обеспечить способ и пр. для эффективного управления активным состоянием только конкретной области (участка, образованного одной клеткой или группой из множества клеток) в живом объекте.
Решение проблемы
Способ измерения жизнедеятельности или способ управления жизнедеятельностью согласно первому аспекту настоящего изобретения представляет собой способ измерения жизнедеятельности или способ управления жизнедеятельностью для измерения или управления активным состоянием живого объекта, в том числе, животного и растения или его изменения, включающий в себя: этап освещения, на котором освещают живой объект электромагнитной волной, длина волны которой включена в назначенный диапазон волн; и этап обнаружения, на котором обнаруживают характеристику, связанную с электромагнитной волной в локальном участке, образованном одной или более клетками в живом объекте, или этап управления, на котором управляют активным состоянием с использованием характеристики, связанной с электромагнитной волной, причем для обнаружения или управления активным состоянием живого объекта или его изменения используется любое из следующих явлений:
[1] энергии перехода между основным состоянием колебательной моды, вновь возникающей между атомами в молекуле, входящей в состав клеточной мембраны, и множеством возбужденных состояний;
[2] энергии перехода между колебательными модами, возникающими между конкретными атомами в молекуле, соответствующей активности живого объекта или ее изменению
и
[3] конкретного значения химического сдвига в ядерном магнитном резонансе,
и назначенный диапазон волн определяется на основании любого из явлений.
Способ измерения жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения состоит в том, что назначенный диапазон волн определяется при условии, что изменение потенциала клеточной мембраны сопровождается явлением, в котором конкретный ион присоединяется к конкретному веществу или отсоединяется от него в локальном участке.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения состоит в том, что назначенный диапазон волн определяется при условии, что конкретное вещество и конкретный ион образуют, по меньшей мере, одну из комбинации фосфатидилхолина или сфингомиелина и иона хлора, комбинации фосфатидилсерина и иона натрия или иона калия, и комбинации гликолипида и иона натрия.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения состоит в том, что: назначенный диапазон волн согласно присоединению или отсоединению иона хлора по отношению к фосфатидилхолину определяется на основании волнового числа 2480 см-1 или значения химического сдвига от δ2,49 до δ2,87 м.д. (миллионных долей) или значения химического сдвига, связанного с δ3,43 м.д. - δ3,55 м.д.; назначенный диапазон волн согласно присоединению или отсоединению иона хлора по отношению к сфингомиелину определяется на основании волнового числа 2450 см-1 или значения химического сдвига от δ2,49 до δ2,87 м.д. или значения химического сдвига, связанного с δ3,43 м.д. - δ3,55 м.д.; назначенный диапазон волн согласно присоединению или отсоединению иона натрия по отношению к фосфатидилсерину определяется на основании волнового числа 429 см-1; назначенный диапазон волн согласно присоединению или отсоединению иона калия по отношению к фосфатидилсерину определяется на основании волнового числа 118 см-1 или 1570 см-1; и назначенный диапазон волн согласно присоединению или отсоединению иона натрия по отношению к гликолипиду определяется на основании волнового числа от 260 до 291 см-1.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения состоит в том, что назначенный диапазон волн определяется так, что включает в себя, по меньшей мере, часть диапазона волн, соответствующего диапазону волновых чисел, имеющему запас от 10 до 20% по отношению к волновому числу в качестве основы, или диапазону значений химического сдвига, имеющему запас от 0,45 м.д. до 0,49 м.д. по отношению к значению химического сдвига в качестве основы.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения состоит в том, что назначенный диапазон волн определяется так, что диапазоны электромагнитных волн, поглощаемых другими веществами, включающий в себя, по меньшей мере, воду, составляющую живой объект, удаляются.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения состоит в том, что назначенное явление является явлением, происходящим в течение назначенного времени отклика в пределах от 4 до 200 мс после изменения активного состояния живого объекта.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения состоит в том, что этап обнаружения является этапом, на котором обнаруживают характеристику поглощения электромагнитной волны в локальном участке в любом сечении в живом объекте с использованием конфокальной системы.
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения дополнительно включает в себя: этап получения, посредством этапа освещения и этап обнаружения, назначенной информации, представляющей аспект пространственного распределения и аспект зависящего от времени изменения характеристики поглощения электромагнитной волны в живом объекте; и этап задания информации жизнедеятельности живого объекта или информации окружающей среды, определяющей окружающую среду, в которой находится живой объект, путем обращения к базе данных, в которой хранится соотношение между информацией жизнедеятельности или информацией окружающей среды и назначенной информацией, на основании полученной назначенной информации
Способ измерения жизнедеятельности согласно первому аспекту настоящего изобретения дополнительно включает в себя: этап распознавания информации жизнедеятельности или информации окружающей среды живого объекта; и этап установления или коррекции соотношения между ними, сохраняемого в базе данных, на основании распознанной информации жизнедеятельности или информации окружающей среды и полученной назначенной информации.
Способ измерения жизнедеятельности согласно второму аспекту настоящего изобретения состоит в том, что динамическая активность живого объекта обнаруживается с использованием характеристики в локальном участке, соответствующем электромагнитной волне, имеющей длину волны не менее 0,84 мкм, но не более 110 мкм, или характеристики в локальном участке, соответствующем электромагнитной волне, связанной со значением химического сдвига не менее 61,7 м.д., но не более 54,5 м.д.
Способ измерения жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения состоит в том, что измеряется зависящее от времени изменение характеристики в локальном участке живого объекта.
Способ измерения жизнедеятельности согласно второму аспекту настоящего изобретения состоит в том, что, по меньшей мере, часть живого объекта освещается модулированной электромагнитной волной, имеющей основную частоту в пределах от 0,2 Гц до 500 кГц.
Способ измерения жизнедеятельности согласно второму аспекту настоящего изобретения состоит в том, что обнаруживается зависящее от времени изменение характеристики в одоном фиксированном локальном участке в живом объекте или обнаруживается набор отдельных зависящих от времени изменений, связанных с характеристикой, во множестве локальных участков, зафиксированных в разных позициях в живом объекте.
Способ измерения жизнедеятельности согласно второму аспекту настоящего изобретения по меньшей мере, один из фиксированных локальных участков соответствует одной клетке или части клетки и освещается модулированной электромагнитной волной, имеющей основную частоту в пределах от 0,2 Гц до 500 кГц.
Способ измерения жизнедеятельности согласно второму аспекту настоящего изобретения состоит в том, что локальный участок соответствует одной клетке или части одной клетки, и обнаруживается изменение характеристики, происходящее согласно изменению потенциала клеточной мембраны, составляющей клетку.
Способ измерения жизнедеятельности согласно второму аспекту настоящего изобретения состоит в том, что живой объект освещается электромагнитными волнами, включающими в себя электромагнитные волны, имеющие множество разных длин волны или электромагнитные волны, имеющие множество разных частот, для обнаружения в локальном участке живого объекта характеристик, соответствующих электромагнитным волнам, имеющим множество длин волны или электромагнитным волнам, имеющим множество частот.
Способ измерения жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения включает в себя: этап генерации, на котором генерируют информацию динамической жизнедеятельности из полученного сигнала обнаружения.
Устройство измерения жизнедеятельности согласно первому аспекту настоящего изобретения представляет собой устройство измерения жизнедеятельности для измерения активного состояния живого объекта, в том числе, животного и растения, включающее в себя: осветительный прибор для освещения живого объекта электромагнитной волной, длина волны которой включена в назначенный диапазон волн; и детектор для обнаружения характеристики, связанной с электромагнитной волной в локальном участке, образованном одной или более клетками в живом объекте, причем: для обнаружения или управления активным состоянием живого объекта или его изменения используется любое из следующих явлений:
[1] энергии перехода между основным состоянием колебательной моды, вновь возникающей между атомами в молекуле, входящей в состав клеточной мембраны, и множеством возбужденных состояний;
[2] энергии перехода между колебательными модами, возникающими между конкретными атомами в молекуле, соответствующей активности живого объекта или ее изменению; и
[3] конкретного значения химического сдвига в ядерном магнитном резонансе,
и назначенный диапазон волн определяется на основании любого из явлений.
Устройство измерения жизнедеятельности, согласно второму аспекту настоящего изобретения, имеющая секцию обнаружения жизнедеятельности и осуществляющее заранее определенный процесс на основании сигнала обнаружения, связанного с жизнедеятельностью, полученного от секции обнаружения жизнедеятельности, отличается тем, что: секция обнаружения жизнедеятельности образована светоизлучающей секцией и секцией обнаружения сигнала; светоизлучающая секция генерирует электромагнитные волны, освещающие живой объект; электромагнитные волны включают в себя электромагнитную волну, имеющую длину волны не менее 0,84 мкм, но не более 110 мкм, или электромагнитную волну, связанную со значением химического сдвига не менее δ1,7 м.д., но не более δ4,5 м.д.; и секция обнаружения сигнала обнаруживает электромагнитную волну, включающую в себя сигнал обнаружения, связанный с активностью живого объекта, полученный в результате освещения электромагнитными волнами.
Устройство измерения жизнедеятельности согласно второму аспекту настоящего изобретения отличается тем, что локальный участок соответствует одной клетке или части одной клетки, и обнаруживается изменение характеристики, происходящее согласно изменению потенциала клеточной мембраны, составляющей клетку.
Устройство измерения жизнедеятельности согласно второму аспекту настоящего изобретения отличается тем, что светоизлучающая секция генерирует электромагнитные волны, включающие в себя электромагнитные волны, имеющие множество разных длин волны или электромагнитные волны, имеющие множество разных частот.
Способ передачи сигнала обнаружения жизнедеятельности состоит в том, что: живой объект освещают электромагнитными волнами, включающими в себя электромагнитную волну, имеющую длину волны не менее 0,84 мкм, но не более 110 мкм, или электромагнитную волну, связанную со значением химического сдвига не менее δ1,7 м.д., но не более δ4,5 м.д.; обнаруживают сигнал обнаружения жизнедеятельности, связанный с характеристикой в локальном участке живого объекта; и передают сигнал обнаружения жизнедеятельности.
Способ передачи сигнала обнаружения жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения состоит в том, что: локальный участок соответствует одной клетке или части одной клетки; и обнаруживают изменение характеристики, происходящее вследствие изменения потенциала клеточной мембраны, составляющей клетку.
Способ передачи информации жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения состоит в том, что живой объект освещают электромагнитной волной, имеющей длину волны не менее 0,84 мкм, но не более 110 мкм, или электромагнитной волной, связанной со значением химического сдвига не менее δ1,7 м.д., но не более δ4,5 м.д., для получения сигнала обнаружения жизнедеятельности, связанного с локальным участком живого объекта, генерируют информацию жизнедеятельности из полученного сигнала обнаружения жизнедеятельности, и передают информацию жизнедеятельности.
Способ передачи сигнала обнаружения жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения состоит в том, что: обнаруживают сигналы обнаружения жизнедеятельности, связанные с соответствующими характеристиками в локальном участке живого объекта, соответствующие электромагнитным волнам, имеющим множество длин волны не менее 0,84 мкм, но не более 110 мкм, или электромагнитным волнам, связанным с множеством значений химического сдвига не менее δ1,7 м.д., но не более δ4,5 м.д.; и передают сигналы обнаружения жизнедеятельности, связанные с соответствующими длинами волны или соответствующими частотами.
Услуга на основании информации жизнедеятельности согласно одному иллюстративному варианту осуществления настоящего изобретения состоит в том, что: живой объект освещается электромагнитными волнами, включающими в себя электромагнитную волну, имеющую длину волны не менее 0,84 мкм, но не более 110 мкм, или электромагнитную волну, связанную со значением химического сдвига не менее δ1,7 м.д., но не более δ4,5 м.д.; обнаруживается сигнал обнаружения жизнедеятельности, связанный с характеристикой в локальном участке живого объекта; и на основании результата генерации информации жизнедеятельности из сигнала обнаружения жизнедеятельности, предоставляется услуга, соответствующая информации жизнедеятельности, или живой объект освещается электромагнитной волной для предоставления услуги, соответствующей управлению жизнедеятельностью.
Услуга на основании информации жизнедеятельности согласно одному варианту осуществления настоящего изобретения отличается тем, что услуга предоставляется на основании результатов обнаружения или измерения или управления жизнедеятельностью, происходящей в локальном участке, образованный одной или более клетками.
Преимущества изобретения
Согласно способу измерения жизнедеятельности или способу управления жизнедеятельностью настоящего изобретения, живой объект освещается электромагнитной волной, длина волны которой включена в назначенный диапазон волн, и производится обнаружение или управление характеристикой или ее изменения в локальном участке живого объекта, соответствующего электромагнитной волне. "Назначенный диапазон волн" это диапазон волн, определенный на основании энергии перехода между колебательными модами, сформированными между конкретными атомами в локальном участке, которые могут возникать в связи с активным состоянием живого объекта или его изменением, или на основании конкретного значения химического сдвига. "Локальный участок" это участок, образованный одной или более клетками.
Следовательно, согласно настоящему изобретению, можно обнаруживать характеристики, связанные с электромагнитными волнами и появляющиеся быстро или за очень короткое время согласно изменениям активного состояния живого объекта. Таким образом, можно измерять активное состояние живого объекта при попытке повысить временное разрешение. Кроме того, согласно одному варианту осуществления настоящего изобретения, поскольку только малый локальный участок освещается электромагнитной волной с использованием свойств схождения электромагнитной волны, не только повышается пространственное разрешение для обнаружения или измерения жизнедеятельности, но и жизнедеятельность управляется только в малом локальном участке. Кроме того, если используется этот способ управления или этот результат обнаружения, можно повысить точность распознавания активного состояния живого объекта и живому объекту или заинтересованному лицу можно предоставить надлежащую услугу.
Краткое описание чертежей
Фиг. 1 иллюстрирует модель накопления заряда на обеих поверхностях нейронной мембраны в случае потенциалов действия и покоя.
Фиг. 2 - оценочная молекулярная структура PCLN в случае присоединения и отсоединения иона Cl-.
Фиг. 3 иллюстрирует оценочные характеристики инфракрасного спектра PCLN в случае присоединения и отсоединения иона Cl-.
фиг. 4 - блок-схема операций, используемая для первоначального вычисления характеристик ближнего инфракрасного спектра на основании ангармонических колебаний.
Фиг. 5 иллюстрирует зависимость относительной статической энергии молекулы от отклонения расстояния между ядрами атомов углерода и водорода.
Фиг. 6 - пояснительный вид флуктуации позиции Cl- в зависимости от отклонения расстояния между ядрами атомов углерода и водорода.
Фиг. 7 иллюстрирует распределения амплитуды волновых функций |m> в отношении ангармонических колебаний.
Фиг. 8 иллюстрирует зависимость полных атомных зарядов от отклонений расстояния между ядрами атомов углерода и водорода.
Фиг. 9 иллюстрирует распределения амплитуды молекулярных орбиталей, собственные значения энергии которых соответствуют HOMO и минимуму.
Фиг. 10 иллюстрирует зависимость электрических дипольных моментов от отклонений расстояния между ядрами атомов углерода и водорода.
Фиг. 11 иллюстрирует сравнение по пространственному разрешению между обнаружением изменения потенциала мембраны и обнаружением изменения концентрации кислорода в крови.
Фиг. 12 иллюстрирует сравнение по временному разрешению между обнаружением изменения потенциала мембраны и обнаружением изменения концентрации кислорода в крови.
Фиг. 13 - пояснительный вид сравнения по точности обнаружения между обнаружением изменения потенциала мембраны и обнаружением изменения концентрации кислорода в крови.
Фиг. 14 - пояснительный вид первого принципа способа мониторинга точки обнаружения жизнедеятельности.
Фиг. 15 - пояснительный вид первого принципа способа мониторинга картины точки обнаружения жизнедеятельности в направлении глубины.
Фиг. 16 - пояснительный вид второго принципа способа мониторинга помеченной позиции на поверхности живого объекта.
Фиг. 17 - пояснительный вид принципа (с использованием конфокальной системы) первого примерного варианта осуществления в отношении оптической системы для обнаружения жизнедеятельности.
Фиг. 18 - пояснительный вид принципа работы первого примерного варианта осуществления в отношении оптической системы для обнаружения жизнедеятельности.
Фиг. 19 демонстрирует соотношение между картиной жидкокристаллического затвора и фотодетекторной ячейкой в первом примерном варианте осуществления оптической системы для обнаружения жизнедеятельности.
Фиг. 20 - пояснительный вид принципа работы в отношении применяемого варианта осуществления оптической системы для обнаружения жизнедеятельности.
Фиг. 21 - пояснительный вид конфигурации фотодетектора в применяемом варианте осуществления оптической системы для обнаружения жизнедеятельности.
Фиг. 22 - пояснительный вид детализированной оптической конфигурации в отношении применяемого варианта осуществления оптической системы для обнаружения жизнедеятельности.
Фиг. 23 - пояснительный вид, иллюстрирующий способ обнаружения локального изменения свойства ядерного магнитного резонанса в живом объекте с высокой скоростью.
Фиг. 24 - пояснительный вид в отношении способа обнаружения положения, где свойство ядерного магнитного резонанса изменяется.
Фиг. 25 - пояснительный вид, иллюстрирующий соотношение между выражением лица и эмоциональной реакцией.
Фиг. 26 - пояснительный вид способа для получения информации жизнедеятельности из движения мимической мышцы.
Фиг. 27 - пояснительный вид шаблона излучения света для света освещения для обнаружения жизнедеятельности при обнаружении жизнедеятельности.
Фиг. 28 - пояснительный вид надлежащего диапазона длин волны для обнаружения/управления жизнедеятельностью в настоящем примерном варианте осуществления/применяемом варианте осуществления.
Фиг. 29 - пояснительный вид механизма гидролиза АТФ миозиновой АТФазой.
Фиг. 30 - вид, поясняющий причину, по которой длина волны полосы поглощения изменяется в зависимости от того, с каким остатком лизина связан водород.
Фиг. 31 - пояснительный вид соотношения между партнером по водородной связи и свойством потенциала ангармонических колебаний.
Фиг. 32 - пояснительный вид примерного сигнал обнаружения, связанного с движением мимической мышцы.
Фиг. 33 - пояснительный вид соотношения между положением мимической мышцы, которая сокращается на лице, и выражением лица.
Фиг. 34 - пояснительный вид позиционного соотношения между обнаружимым диапазоном и целью обнаружения для секции обнаружения жизнедеятельности.
Фиг. 35 - пояснительный вид способа 1 измерения жизнедеятельности в применяемом варианте осуществления.
Фиг. 36 - пояснительный вид способа 2 измерения жизнедеятельности в применяемом варианте осуществления.
Фиг. 37 - пояснительный вид конфигурации в устройстве управления жизнедеятельностью в настоящем примерном варианте осуществления.
Фиг. 38 - пояснительный вид применяемого варианта осуществления устройства управления жизнедеятельностью.
Фиг. 39 - пояснительный вид воротного механизма потенциалозависимого ионного канала и способа управления им извне.
Описание вариантов осуществления
Оглавление, которое обеспечивает обзор описанных ниже вариантов осуществления, приведено до описаний вариантов осуществления. Кроме того, описанные ниже варианты осуществления относятся к способу измерения жизнедеятельности, устройству измерения жизнедеятельности, способу передачи сигнала обнаружения жизнедеятельности или услуге на основании информация жизнедеятельности.
2] Модель потенциала действия в отношении нейрона
2.1) Структурная особенность нейронной мембраны на основании вспомогательной информации
2.2) Электромагнитный анализ в отношении потенциала действия
2.3) Модель накопления заряда на обеих поверхностях нейронной мембраны в случае потенциалов действия и покоя
2.4) Концентрации ионов в цитоплазме и внеклеточной жидкости, которые описаны во вспомогательной информации
2.5) Молекулярные структуры фосфолипидов и положения присоединения ионов в фосфолипидах
3] Оценочные характеристики инфракрасного спектра на основании модели потенциала действия
3.1) Способ вычисления с помощью программы квантохимического моделирования
3.2) Модель присоединения иона Cl- к группе -N+(CH3)3 и оценка по волновому числу соответствующей полосы поглощения
3.5) Изменение инфракрасного спектра на основании модели присоединения иона К+ к фосфолипиду
4] Оценочные характеристики ближнего инфракрасного спектра на основании модели потенциала действия
4.2) Описательный обзор первоначального способа вычисления на основании ангармонических колебаний
4.3) Уравнение Шредингера, указывающее конкретные нормальные колебания
4.5) Получение вероятности перехода по Эйнштейну
4.6) Подстановка результатов оценки из программы квантохимического моделирования
4.6.1) Метод численного анализа с помощью программы квантохимического моделирования
4.6.2) Оценивание ангармонического потенциала
4.6.3) Оценивание характеристик дипольного момента
4.6.4) Длины волны поглощения света и светопоглощательные способности соответствующих полос поглощения
4.7) Рассмотрение обнаружимого диапазона в настоящем примерном варианте осуществления
5] Оценка спектральных характеристик ЯМР на основании модели потенциала действия
5.1) Изменение спектральной характеристики ЯМР и оценочные значения химического сдвига в отношении потенциала действия
5.1.1) Перспектива изменения спектральных характеристик ЯМР в отношении потенциала действия
5.1.2) Способ вычисления с помощью другой программы квантохимического моделирования
5.1.3) Оценивание значений химического сдвига в спектральных характеристиках ЯМР
5.2) Рассмотрение измеримого диапазона в настоящем примерном варианте осуществления
6] Технические признаки способа обнаружения/управления жизнедеятельностью и способа измерения жизнедеятельности в настоящем примерном варианте осуществления
6.1) Содержание жизнедеятельности, подлежащей измерению, и признаки способа обнаружения/управления жизнедеятельностью
6.1.3) Жизнедеятельность в живом объекте от поверхностного участка до очень глубокого участка, рассматриваемая как цель обнаружения/управления
6.2) Способ выравнивания и сохранения точки обнаружения/управления жизнедеятельностью
6.2.1) Способ задания позиции обнаружения путем обнаружения изображения в сечении, включающего в себя точку обнаружения/управления
6.2.2) Способ оценивания и задания позиции точки обнаружения путем обнаружения конкретной позиции на поверхности живого объекта
6.3) Способ фотоэлектрического преобразования для обнаружения жизнедеятельности
6.3.1) Использование конфокальной системы
6.3.2) Выделение пространственных изменений и изменений, зависящих от времени, с помощью оптической системы формирования изображения
6.3.3) Способ обнаружения высокоскоростного изменения свойства ядерного магнитного резонанса
6.3.4) Способ подавления помех от других, соседних систем обнаружения жизнедеятельности
6.5) Способ измерения жизнедеятельности
6.5.4) Другие способы измерения жизнедеятельности
11] Другие применяемые варианты осуществления в отношении обнаружения/управления жизнедеятельностью
11.1) Другие явления жизнедеятельности, в которых состояния сокращения и расслабления скелетной мышцы подлежат обнаружению/управлению
11.3) Механизм переноса миозиновой АТФазы
11.4) Характеристики обнаружения/управления жизнедеятельностью
11.5) Признаки способа обнаружения жизнедеятельности
12] Способ управления жизнедеятельностью
12.1) Обзор основного способа управления жизнедеятельностью
12.3) Молекулярная структура ионного канала и способ управления воротным механизмом
12.4) Характеристика управления жизнедеятельностью
2] Модель потенциала действия в отношении нейрона
Прежде всего, в разделах 2.1 и 2.4 описана общеизвестная информация, касающаяся структуры нейронной мембраны и условий ее окружающей среды. Затем, в разделе 2.2 описан электромагнитный анализ в отношении широко известной части явления потенциала действия. Затем в разделах 2.3 и 2.5 описана первоначально предложенная модель потенциала действия нейрона.
Эта модель потенциала действия нейрона базируется на концепции модели накопления заряда, предложенной в разделе 2.3.
2.1) Структурная особенность нейронной мембраны на основании вспомогательной информации
Прежде всего, опишем общеизвестные структурные особенности нейронной мембраны. Нейрон имеет общую мембрану, которая может входить в состав других разновидностей клеток, кроме нейрона, и общая мембрана содержит: фосфолипиды; гликолипиды; холестерин; и белки мембраны, включающие в себя ионные каналы.
Липидный бислой, который содержит фосфолипиды/ гликолипиды и холестерин, выполнен с возможностью расщепления на наружный слой, обращенный к внеклеточной жидкости, и внутренний слой, обращенный к цитоплазме. Наружный слой включает в себя конкретные молекулы, принадлежащие к фосфолипидам, и конкретные молекулы редко входят в состав внутреннего слоя. Фиг. 1 (а) демонстрирует, какого рода молекулы, принадлежащие к фосфолипидам или гликолипидам, располагаются в наружных и внутренних слоях. Наружный слой, в основном, содержит фосфатидилхолин PCLN, сфингомиелин SMLN и гликолипиды, и внутренний слой, в основном, содержит фосфатидилсерин PSRN, фосфатидилэтаноламин РЕАМ и фосфатидилинозитол PINT (процентное содержание PINT сравнительно мало). Согласно фиг. 1, двойные линии указывают части жирных кислот, упакованные в липидный бислой.
Ганглиозид принадлежит к гликолипидам и, в частности, имеет отрицательный электрический заряд, и его содержание максимально в любых разновидностях молекул, принадлежащих к гликолипидам. Говорят, что суммарный вес ганглиозидов в нейронной мембране составляет от 5% до 10% суммарного веса липидов. Таким образом, в этом варианте осуществления, ганглиозид можно считать представителем гликолипидов. Кроме того, сообщается, что процентное содержание ганглиозида типа Dia (GD1a) наиболее велико в нейронной мембране млекопитающих (Н. Rahmann et. al.: Trends in Glycoscience and Glycotechnology Vol. 10, No.56 (1998) р. 423), так что в этом объяснении GD1a может представлять все разновидности ганглиозидов. Молекулы других видов, принадлежащие к гликолипидам, также могут упоминаться в нижеследующих описаниях.
2.2) Электромагнитный анализ в отношении потенциала действия
Напряжение в цитоплазме поддерживается отрицательным в случае потенциала покоя мембраны, и напряжение становится положительным в случае потенциала действия. Известно, что множество положительных электрических зарядов собирается на поверхности внутреннего слоя, обращенного к цитоплазме при наличии потенциала действия (В. Alberts et. al.: Molecular Biology of the Cell 4th edition (Garland Science, 2002) глава 10).
Можно предположить, что липидный бислой выступает в роли электростатической емкости в случае потенциалов действия и покоя поскольку значение электрического сопротивления липидного бислоя очень велико и превышает 100 гигаом, и значение электростатической емкости равно приблизительно 1,0 микрофарад см2 (М. Sugawara: Bionics vol. 3, No. 7 (2006) p. 38-39 [на японском языке]).
Теория электростатической емкости электромагнетизма гласит, что множество отрицательных электрических зарядов должно собираться на поверхности наружного слоя, обращенного к внеклеточной жидкости в случае потенциала действия, когда множество положительных электрических зарядов собирается на поверхности внутреннего слоя, обращенного к цитоплазме, и абсолютное значение отрицательных электрических зарядов должно быть равно значению положительного электрического заряда.
2.3) Модель накопления заряда на обеих поверхностях нейронной мембраны в случае потенциалов действия и покоя
В разделе 2.3 описана первоначально предложенная модель накопления заряда на обеих поверхностях нейронной мембраны в случае потенциалов действия и покоя, и эта модель накопления заряда была построена путем применения электромагнитного анализа, упомянутого в разделе 2.2, к мембранной структуре, объясненной в разделе 2.1.
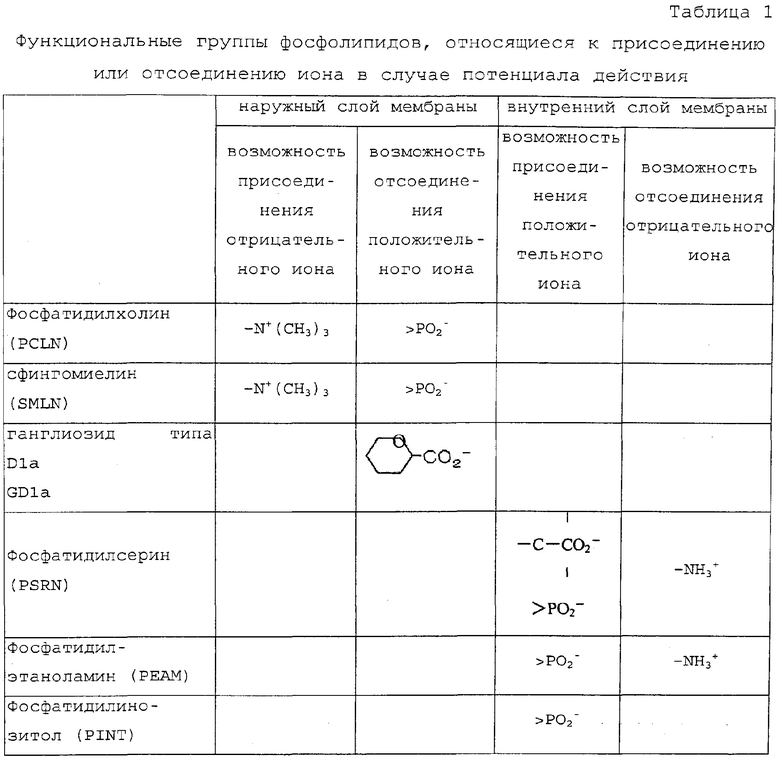
В Таблице 1 перечислены функциональные группы фосфолипидов, к которым может присоединяться или от которых может отсоединяется множество ионов при наличии потенциала действия, и таблица 1 демонстрирует, что наружный слой, в основном, содержит PCLN, SMLN и GD1a, и внутренний слой, в основном, содержит PSRN, РЕАМ и PINT, как описано в разделе 2.1.
PSRN в водной среде свойственно иметь заряды "-1", поскольку PSRN содержит две функциональные группы  и
и  , которым, соответственно, свойственно иметь отрицательные электрические заряды, и одну функциональную группу
, которым, соответственно, свойственно иметь отрицательные электрические заряды, и одну функциональную группу  , которой свойственно иметь положительный электрический заряд.
, которой свойственно иметь положительный электрический заряд.
PINT в водной среде также свойственно иметь заряды "-1", поскольку PINT содержит только одну функциональную группу , которой свойственно иметь отрицательный электрический заряд. Согласно фиг. 1 (а), заряды "-1" генерируют область отрицательного заряда на поверхности нейронной мембраны, и "знак минус" представляет эту область отрицательного заряда.
Электростатическое притяжение заставляет положительные электрические заряды собираться на наружном слое липидного бислоя, когда области отрицательного заряда генерируются на внутреннем слое в случае потенциала покоя мембраны. Таким образом, области положительного заряда, представленные "знаками плюс" на фиг. 1(а), могут генерироваться на гидрофильных головных частях PCLN и SMLN.
В случае потенциала действия, множество областей отрицательного заряда может генерироваться не только на гидрофильных головных частях PCLN и SMLN, но и на GD1a, когда положительные электрические заряды собираются на внутреннем слое, и множество областей положительного заряда генерируются на гидрофильных головных частях РЕАМ и PSRN (фиг. 1 (b)).
В заключение этого раздела, предполагается, что обратимое формирование областей положительного и отрицательного заряда на обеих поверхностях мембраны изменяет напряжение на нейронной мембране.
2.4) Концентрации ионов в цитоплазме и внеклеточной жидкости, которые описаны во вспомогательной информации

В этом разделе рассматриваются конкретные носители, которые генерируют обратимое формирование областей положительного и отрицательного заряда.
Согласно Альбертсу, в таблице 2 приведены концентрации ионов в цитоплазме и внеклеточной жидкости общих млекопитающих (В. Alberts et al.: Molecular Biology of the Cell 4th edition (Garland Science, 2002) глава 11, таблица 11-1). Во внеклеточной жидкости большинство ионов составляют Na+ и Cl-, а в цитоплазме - K+. Известно, что ионы Na+, при наличии потенциала действия, перетекают из внеклеточного участка в цитоплазму. Таким образом, можно предположить, что большинство носителей, которые генерируют обратимое формирование областей положительного и отрицательного заряда, представляют собой присоединения или отсоединения иона Na+ или Cl- на наружном слое и присоединения или отсоединения иона К+ или Na+ на внутреннем слое.
Согласно таблице 2, можно видеть, что ион Н+ (ион водорода) и ион ОН- оказывают меньшее влияние на потенциал действия поскольку концентрации этих ионов сравнительно малы.
2.5) Молекулярные структуры фосфолипидов и положения присоединения ионов в фосфолипидах
В этом разделе подробно рассматриваются структуры и положения областей положительного и отрицательного заряда на обеих поверхностях нейронной мембраны путем объединения модели накопления заряда, рассматриваемой в разделе 2.3, с моделью носителей, описанной в разделе 2.4.
Когда потенциал покоя мембраны продолжается, и области отрицательного заряда генерируются на внутреннем слое, обращенном к цитоплазме, ион Na+ может притягиваться к поверхности наружного слоя и образовывать ионную связь с группами , локально формируя нейтральную соль  в PCLN или SMLN. Согласно таблице 1, оба PCLN и SMLN в водной среде содержат функциональные группы и -N+(CH3)3. Таким образом, когда PCLN или SMLN имеет нейтральную часть , оставшаяся положительная группа -N+(СН3)3 может генерировать область положительного заряда в PCLN или SMLN.
в PCLN или SMLN. Согласно таблице 1, оба PCLN и SMLN в водной среде содержат функциональные группы и -N+(CH3)3. Таким образом, когда PCLN или SMLN имеет нейтральную часть , оставшаяся положительная группа -N+(СН3)3 может генерировать область положительного заряда в PCLN или SMLN.
Таблица 1 также демонстрирует, что GD1a в водной среде вряд ли образует область положительного заряда, поскольку не содержит положительных групп. GD1a содержат только функциональные группы  , которые обычно имеют отрицательные электрические заряды. Считается, что множество GD1a включает в себя нейтральные соли
, которые обычно имеют отрицательные электрические заряды. Считается, что множество GD1a включает в себя нейтральные соли  и не генерирует заряженных областей, когда потенциал покоя мембраны продолжается.
и не генерирует заряженных областей, когда потенциал покоя мембраны продолжается.
Согласно этой первоначально предложенной модели накопления заряда, предполагается, что ион Na+ или К+ может образовывать ионную связь с группой одного из РЕАМ, PSRN и PINT или с группой PSRN в случае потенциала действия. Кроме того, когда ион Na+ или К+ вновь образует нейтральную соль, оставшаяся функциональная группа  , которая обычно имеет заряд "+1" в водной среде, генерирует область положительного заряда на гидрофильной головной части РЕАМ или PSRN.
, которая обычно имеет заряд "+1" в водной среде, генерирует область положительного заряда на гидрофильной головной части РЕАМ или PSRN.
Когда области положительного заряда генерируются на внутреннем слое, обращенном к цитоплазме, под действием электростатического отталкивания ионы Na+ могут отсоединяться от нейтральных солей PCLN и SMLN и GD1a на наружном слое. Это отсоединение иона Na+ может вновь генерировать область отрицательного заряда на GD1a, поскольку в GD1a остается группа , которая имеет заряды "-1".
Кроме того, электростатическое притяжение областей положительного заряда на внутреннем слое притягивает ионы Cl- к поверхности наружного слоя, и эти ионы Cl- могут объединяться с группами -N(CH3)3 PCLN или SMLN, образуя водородные (или ионные) связи. Эти вновь созданные нейтральные соли -N+(СН3)3Cl- могут генерировать области отрицательного заряда на гидрофильных головных частях PCLN или SMLN в случае потенциала действия, когда PCLN или SMLN имеют как нейтральные соли -N+(СН3)3Cl-, так и отрицательные группы , от которых отсоединились ионы Na+.
Эту модель накопления заряда можно применять не только к потенциалу действия вышеупомянутого нейрона, но и к передаче сигнала через аксон нейрона и к соматической нервно-мышечной передаче, проходящей через нервно-мышечный синапс.
Аксон покрыт миелиновой оболочкой 12, которая значительно толще нейронной мембраны. Теория электростатической емкости электромагнетизма гласит, что значение электростатической емкости обратно пропорционально толщине миелиновой оболочки 12, из-за чего, плотность заряженных областей на поверхности миелиновой оболочки 12 падает. Таким образом, нужно разработать способ обнаружения жизнедеятельности при обнаружении передачи сигнала через аксон 5 нейрона. Этот способ обнаружения жизнедеятельности будет объяснен позже.
Согласно Неттеру (F.H. Netter: The Netter Collection of Medical Illustrations Vol. 1 Nervous System Part 1 Anatomy and Physiology (Elsevier, Inc., 1983) p. 162), потенциал мембраны для мышечной мембраны изменяется, когда соматический нервно-мышечный сигнал проходит через нервно-мышечный синапс 5, что позволяет обнаруживать мышечный потенциал мембраны согласно этому варианту осуществления.
3] Оценочные характеристики инфракрасного спектра на основании модели потенциала действия
В главе 3 описаны характеристики инфракрасного спектра на основании модели потенциала действия, предложенной в главе 2, и характеристики инфракрасного спектра, полученные из компьютерных моделей, построенных с помощью программы квантохимического моделирования.
3.1) Способ вычисления с помощью программы квантохимического моделирования
В главах 3 и 4, автор использовал "SCIGRESS МО Compact Version 1 Pro" в качестве программы квантохимического моделирования. Эта программа квантохимического моделирования является продуктом фирмы Fujitsu Corporation, и "SCIGRESS" является зарегистрированным товарным знаком. Эта программа квантохимического моделирования использует полуэмпирический метод молекулярных орбиталей.
Этот способ вычисления содержит два этапа вычисления для поддержания высокой точности вычисления. Первый этап вычисления служит для оптимизации молекулярной структуры, и второй этап вычисления служит для анализа колебательных мод.
Некоторыми ключевыми словами оптимизации являются "PM3 EF PRECISE EPS=78,4 GNORM=0,00001 LET DDMIN=0,00001 PULAY SAFE SHIFT=1,00", где "PM3 EPS=78,4" означает оптимизацию в водной среде, "PM3" означает метод аппроксимации гамильтониана, и другие ключевые слова означают установку точности вычисления или условий сходимости вычисления. Кроме того, некоторые ключевые слова анализа колебаний представляют собой "FORCE ISOTOPE EPS=78,4 PM3", где "FORCE ISOTOPE" означает анализ колебаний.
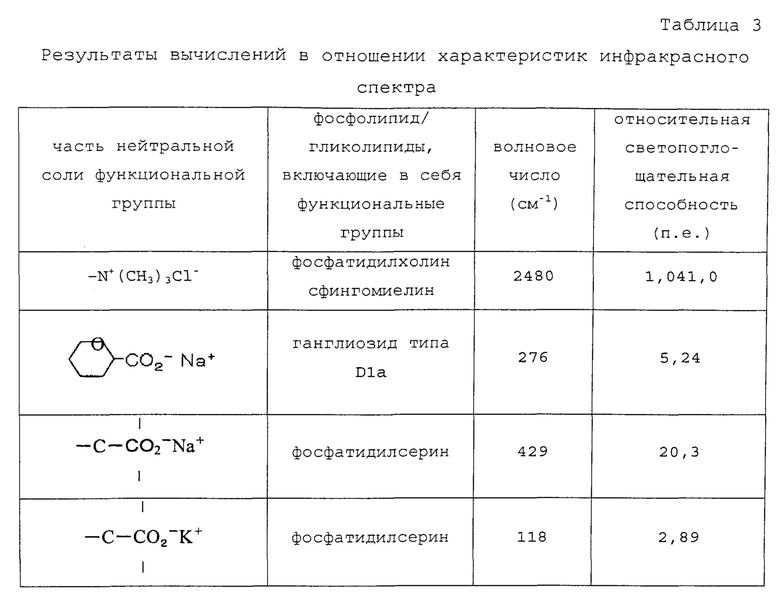
Таблица 3 демонстрирует результаты вычислений, и каждый результат вычисления полностью описан после этого раздела.
3.2) Модель присоединения иона Cl- к группе -N+(CH3)3 и оценка по волновому числу соответствующей полосы поглощения
В этом разделе описана вновь генерируемая полоса поглощения, оцененная посредством компьютерного моделирования когда ион Cl- присоединяется к группе -N+(СН3)3 PCLN. Для этого компьютерного моделирования используется молекулярная структура, представленная химической формулой 1.
[Химическая фор. 1]
Молекулярная структура, используемая для компьютерного моделирования, когда ион Cl- присоединяется к группе -N+(CH3)3 PCLN
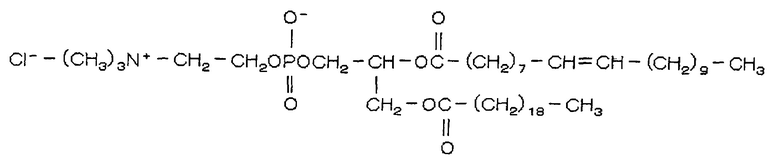
фиг. 2 демонстрирует структуры, оптимизированные посредством компьютерного моделирования. Фиг. 2 (а) иллюстрирует состояние присоединения иона Cl-, и фиг. 2 (b) иллюстрирует состояние отсоединения иона Cl-. Как показано на фиг. 2 (а), ион Cl- присоединяется к атому водорода, расположенному в наиболее удаленной позиции от атома фосфора, и ион Cl- и атом водорода образуют водородную (или ионную) связь. Конечно, ион Cl- может присоединяться к одному из 8 атомов водорода, не расположенных в наиболее удаленной позиции от атома фосфора.
Фиг. 3 демонстрирует спектры поглощения, оцененные посредством компьютерного моделирования, и разрешение устанавливается равным 5 см-1. Верхняя часть фиг. 3 демонстрирует состояние присоединения иона Cl-, и нижняя часть фиг. 3 демонстрирующая состояние отсоединения иона Cl-, иллюстрирует спектр поглощения единичного PCLN. Конкретная полоса поглощения, помеченная стрелкой, присутствует в верхней части фиг. 3, но отсутствует в нижней части. Кроме того, конкретная полоса поглощения обусловлена асимметричным растяжением С-Н-Cl-. Согласно таблице 3, значение волнового числа этой конкретной полосы поглощения равно 2480 см-1, и ее значение относительной светопоглощательной способности равно 1,041,0.
Другой спектр поглощения оценивается, когда ион Cl- присоединяется к группе -N+(CH3)3 SMLN. Результат другой оценки демонстрирует, что значение волнового числа аналогичной полосы поглощения равно 2450 см-1, и что значение относительной светопоглощательной способности аналогичной полосы поглощения равно 1,041,0. Таким образом, подтверждается, что состояния присоединения иона Cl- обоих PCLN и SMLN аналогично генерируют конкретные полосы поглощения.
Как показано в верхней части фиг. 3, конкретная полоса поглощения, помеченная стрелкой имеет большую светопоглощательную способность. Причина этого явления подлежит рассмотрению.
Таблица 4 демонстрирует полные атомные заряды, вычисленные с помощью анализа заселенности по схеме Малликена (Y. Harada: Ryoushi kagaku (Quantum Chemistry) vol. 2 (Shyoukabou, 2007) глава 18, раздел 18⋅6, стр. 163 [на японском языке]) в случае присоединения и отсоединения иона Cl-, и каждая позиция атома углерода С, атома водорода Н и иона хлора Cl- показана на фиг. 2 (а). Эти атомы углерода и водорода, и этот ион хлора совместно способствуют асимметричному растяжению С-Н-Cl-.
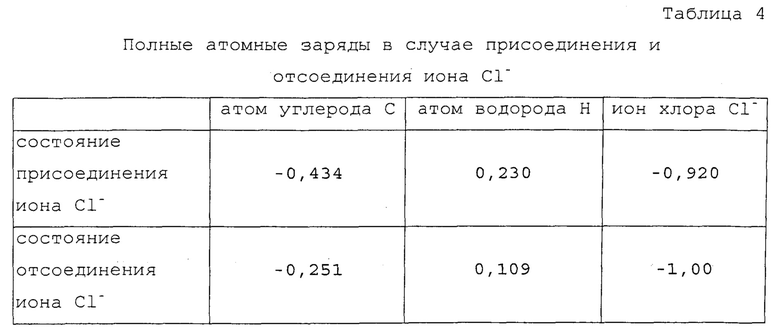
Таблица 4 демонстрирует, что полный заряд атома углерода С динамически уменьшается, и полный заряд атома водорода Н заметно возрастает, когда ион Cl- присоединяется к группе -N+(CH3)3. Считается, что молекулярные орбитали притягиваются к атому углерода С и отталкиваются от атома водорода Н в случае присоединения иона Cl-, и причина этих явлений будет полностью описана в разделе 4.6.3. Изменение полных атомных зарядов приводит к увеличению электрического дипольного момента μ и, следовательно, к росту светопоглощательной способности.
3.5) Изменение инфракрасного спектра на основании модели присоединения иона К+ к фосфолипиду
В этом разделе описаны генерируемые и подавляемые полосы поглощения, оцененные посредством компьютерного моделирования, когда ион К+ присоединяется к группе PSRN в случае потенциала действия. Для этого компьютерного моделирования используется молекулярная структура, представленная химической формулой 2.
[Химическая фор. 2]
Молекулярная структура, используемая для компьютерного моделирования, когда ион К+ присоединяется к группе PSRN

Согласно компьютерному моделированию, оптимизированная молекулярная структура иона К+, присоединенного PSRN, указывает, что ион К+ располагается вблизи только одного атома кислорода группы . Можно видеть, что это различие в ионном положении определяется ионным радиусом К+, который больше ионного радиуса Na+.
Таблица 3 демонстрирует, что скелетные колебания  генерируют новую полосу поглощения, значение волнового числа которой равно 118 см-1, и значение относительной светопоглощательной способности равно 2,89, что гораздо меньше соответствующеего значения в отношении иона Na+ 20,3. Можно видеть, что это малое значение 2,89 определяется ионным радиусом K+, который больше ионного радиуса Na+. Кроме того, компьютерное моделирование не генерирует новых полос поглощения, когда ион К+ присоединяется к группе PSRN, показанной в таблице 1.
генерируют новую полосу поглощения, значение волнового числа которой равно 118 см-1, и значение относительной светопоглощательной способности равно 2,89, что гораздо меньше соответствующеего значения в отношении иона Na+ 20,3. Можно видеть, что это малое значение 2,89 определяется ионным радиусом K+, который больше ионного радиуса Na+. Кроме того, компьютерное моделирование не генерирует новых полос поглощения, когда ион К+ присоединяется к группе PSRN, показанной в таблице 1.
Согласно компьютерному моделированию, присоединение иона К+ к группе имеет отличительную характеристику спектра поглощения, которая подавляет симметричное растяжение карбоксильной группы и значительно снижает соответствующее значение относительной светопоглощательной способности от 98,0 до 15,2, и значение волнового числа симметричного растяжения равно 1570 см-1. Считается, что ион К+, расположенный вблизи одного атома кислорода группы , может сильно препятствовать симметричному растяжению карбоксильной группы.
4] Оценочные характеристики ближнего инфракрасного спектра на основании модели потенциала действия
4.2) Описательный обзор первоначального способа вычисления на основании ангармонических колебаний
Этот вновь предложенный первоначальный способ вычисления в отношении характеристик инфракрасного спектра имеет следующие особенности:
1. С использованием теории возмущений квантовой механики, из уравнения Шредингера получаются реляционные формулы для длины волны n-го обертона и вероятности перехода по Эйнштейну;
2. С использованием программы квантохимического моделирования, вычисляются свойство ангармонического потенциала и свойство электрического дипольного момента для подстановки этих свойств в реляционные формулы, упомянутые в п. 1;
3. Путем комбинирования свойств с реляционными формулами, оцениваются значения длины волны n-го обертона и соответствующие светопоглощательные способности.
Согласно фиг. 4, ниже приведен обзор способа вычисления. С использованием программы квантохимического моделирования, выполняется (S3) колебательный анализ для конкретной макромолекулы для нахождения конкретных нормальных колебаний, соответствующих гармоническим колебаниям. Между тем, строится (31) уравнение Шредингера, включающее в себя взаимодействие с электромагнитным полем в конкретной макромолекуле. Затем, с использованием приближения Борна - Оппенгеймера, из уравнения Шредингера выделяется (32) часть атомного взаимодействия. По выполнении этапа 2 и этапа 3, на основании 33 выбирается (34) конкретное атомное взаимодействие в отношении конкретных нормальных колебаний. На этом этапе 4, влияние всех остальных атомных взаимодействий, которые не были выбраны, заменяется свойством ангармонического потенциала.
Значения полной статической энергии молекулы можно численно вычислять (36) с использованием программы квантохимического моделирования. На этом этапе 6, молекулярная структура повторно оптимизируется для оценивания одного из значений полной статической энергии молекулы всякий раз, когда отклонение расстояния между двумя атомными ядрами устанавливается равным все большему значению, и два атомных ядра соотносятся с конкретным атомным взаимодействием, выбранным на этапе 4. На этапах 5-7, подстановка значений полной статической энергии молекулы на основании программы квантохимического моделирования вместо свойства ангармонического потенциала на основе квантовой механики объединяет численный анализ компьютерных моделей с реляционными формулами на основе квантовой механики. После этапа 6, свойство электрического дипольного момента оценивается (S10) с использованием программы квантохимического моделирования, и это свойство электрического дипольного момента используется для выполнения этапа 11.
Уравнение, полученное на этапе 4, включает в себя свойство ангармонического потенциала, которое содержит коэффициент k4 4-го порядка и коэффициент k3 3-го порядка (ангармонические члены), и коэффициент k2 2-го порядка (гармонический член). Прежде всего, конкретное уравнение, в котором оба коэффициента k4 и k3 уравнения заданы равными "0" решается для получения волновых функций гармонических колебаний, и эти волновые функции гармонических колебаний соответствуют последовательности основных функций. Кроме того, с использованием основных функций и времянезависимой теории возмущений, уравнение, включающее в себя k4 и k3, решается (35) для получения волновых функций ангармонических колебаний.
На этапе 7, значения длины волны полосы поглощения, принадлежащие свету в ближнем инфракрасном диапазоне, вычисляются путем вычитания собственного. значения энергии волновой функции из другого собственного значения энергии волновой функции.
С использованием времязависимой теории возмущений и волновых функций ангармонических колебаний, строится (S8) система уравнений относительно изменения амплитуды в зависимости от времени каждой ангармонической колебательной моды. Затем система уравнений решается для получения реляционных формул вероятности перехода по Эйнштейну (39), и сравнение светопоглощательной способности между полосами поглощения можно получить (S11) из вероятностей переходов по Эйнштейну.
Этот вариант осуществления демонстрирует способ оценки в отношении последовательности значений длины волны и соответствующих светопоглощательных способностей n-х обертонов, и n-е обертоны относятся к ангармонически асимметричному растяжению ковалентных и водородных связей С-Н-Cl-. Этот способ оценки можно распространить на оценивания деформаций или некоторых разновидностей комбинаций между деформациями и асимметричными растяжениями, если новые волновые функции получаются для умножения волновых функций, указывающих асимметричное растяжение, на волновые функции, указывающие деформацию.
4.3) Уравнение Шредингера, указывающее конкретные нормальные колебания
В результате процесса, осуществляемого на этапах 1-8, показанных на фиг. 4, уравнение Шредингера, связанное с асимметричным растяжением С-Н-Cl-, задается следующей формулой. Таким образом, когда снижение массы по отношению к MC в качестве массы ядра атома углерода и MH в качестве массы ядра атома водорода, определяется как:
[фор. 16]
получается следующая формула [фор. 27]

В уравнении (А⋅27), Е и ν представляют амплитуду и частоту вектора внешнего электрического поля, μ представляет электрический дипольный момент, генерируемый ядром атома углерода и ядром атома водорода.
4.5) Получение вероятности перехода по Эйнштейну
В ур. (А.27), когда
[фор. 32]

собственные значения энергии εm для ангармонических колебаний выражаются в виде [фор. 38]

4.6) Подстановка результатов оценки из программы квантохимического моделирования
Согласно фиг. 4, раздел 4.6 подставляет некоторые результаты численного анализа, произведенного с помощью компьютерных моделей, в реляционные формулы на основе квантовой механики, что позволяет получить значения длины волны полос поглощения и соответствующее сравнение светопоглощательной способности. Кроме того, в разделе 4.6 также подробно описан метод численного анализа.
4.6.1) Метод численного анализа с помощью программы квантохимического моделирования
В этом разделе описан метод численного анализа с помощью компьютерных моделей.
Модель молекулярной структуры, используемая для этого численного анализа, представляет собой Cl-(СН3)3N+CH2CH2OH в водной среде, образующийся в результате присоединения Cl- к холину (СН3)3N+CH2CH2OH, соответствующему ингредиенту PCLN или SMLN.
Всякий раз, когда отклонение расстояния между ядрами атомов углерода и водорода, образующее асимметричное растяжение Cl--Н-С, устанавливается равным все большему значению, каждая молекулярная структура повторно оптимизируется для оценивания одного из полных статических энергий молекул и полных атомных зарядов, вычисленных с помощью анализа заселенности по схеме Малликена.
Некоторыми ключевыми словами оптимизации являются "PM3 ЕР PRECISE EPS=78,4 GNORM=0,00001 LET DDMIN=0,00001 ALLVEC". Этот численный анализ поддерживает высокую точность, поскольку анализ колебаний подтверждает, что молекулярная структура с отклонением расстояния "0" не имеет отрицательных значений волнового числа.
4.6.2) Оценивание ангармонического потенциала
В отношении этапа 6 на фиг. 4, фиг. 5 демонстрирует зависимость относительной статической энергии молекулы от отклонения расстояния между ядрами атомов углерода и водорода, образующего асимметричное растяжение Cl--Н-С, и относительная статическая энергия молекулы означает значение сдвига полной статической энергии молекулы для регулировки минимального значения относительной статической энергии молекулы до "0". На основании фиг. 5, параметры в ур. (А-27) связаны следующим образом:
[фор. 57]

Подставляя формулы (А-57) в формулу (А-32), получаем
[фор. 58]

Фиг. 5 имеет точку кажущегося нарушения непрерывности свойства ангармонического потенциала, который имеет место между α-точкой и β-точкой, и в этом разделе будет описана причина возникновения точки кажущегося нарушения непрерывности.
Как показано на фиг. 6 (а), программа квантохимического моделирования "SCIGRESS МО Compact Version 1 Pro" обеспечивает оптимизированную молекулярную структуру Cl-(СН3)3N+СН2СН2ОН, когда значение отклонения расстояния между ядрами атомов углерода и водорода равно "0". Фиг. 6 (а) демонстрирует, что ион Cl-, ядро атома водорода Н и ядро атома углерода С располагаются приблизительно на одной прямой, в связи с чем, можно видеть, что ион Cl- расположен под линией продолжения (штрихпунктирной линией) связи ядра атома азота N и ядра атома углерода С', расположенного по левую сторону от N. Эта конфигурация сохраняется, когда расстояние между ядрами атомов углерода и водорода возрастает. Напротив, когда отклонение расстояния превышает -0,1 ангстрем, кажется, что ион Cl- перемещается в конкретную позицию, которая располагается на линии продолжения (штрихпунктирной линии) связи N и С', как показано на фиг. 6 (b). Это кажущееся перемещение иона Cl- объясняет возникновение точки кажущегося нарушения непрерывности.
Фиг. 5 и 6 получены на основании модели полуклассической механики, где предполагается, что позиции всех атомных ядер строго фиксированы. Согласно истинной квантовой механике, позиции всех атомных ядер не являются строго фиксированными и каждая из них представлена соответствующей волновой функцией, что, по существу, устраняет точку кажущегося нарушения непрерывности.
На Фиг. 7 представлено доказательство вышеприведенного объяснения. Фиг. 7 демонстрирует волновые функции |m>, полученные путем подстановки формулы (А-57) в формулу (А-42),
[фор. 42]

и демонстрирует, что основное состояние |0> имеет достаточную вероятность существования в точке кажущегося нарушения непрерывности. Это явление говорит о том, что позиция иона Cl- имеет вероятности обеих фиг. 6 (а) и 6(b) в случае основного состояния |0>.
4.6.3) Оценивание характеристик дипольного момента
Фиг. 8 демонстрирует полные атомные заряды в зависимости от отклонения расстояния между ядрами атомов углерода и водорода, образующего асимметричное растяжение Cl--Н-С, и единицей полного атомного заряда является квант электричества е0.
С точки зрения классической механики в отношении перемещения атомных ядер, образующего асимметричное растяжение Cl--Н-С, как показано в [А] и [С] раздела 4.3, ион Cl- слабо перемещается, и ядро атома водорода Н сильно перемещается. Таким образом, когда расстояние между ядрами атомов углерода и водорода уменьшается (левая сторона фиг. 8), расстояние между ионом Cl- и ядром атома водорода Н возрастает, и значение полного атомного заряда иона Cl- достигает "-1", и значения полного атомного заряда углерода и водорода достигает исходных значений при отсоединении иона Cl-.
Напротив, когда расстояние между ядрами атомов углерода и водорода возрастает (правая сторона фиг. 8), расстояние между ионом Cl- и ядро атома водорода уменьшается, и значение полного атомного заряда углерода монотонно убывает, но значение полного атомного заряда водорода достигает значения насыщения.
С использованием результатов анализ молекулярных орбиталей, причины свойств полного атомного заряда, показанного на фиг. 8, можно описать ниже. Фиг. 9 (а) и 9 (b) демонстрируют самую высокую и самую низкую занятые молекулярные орбитали.
Самая высокая занятая молекулярная орбиталь (HOMO), показанная на фиг. 9 (а) в основном содержит атомные орбитали 3Рх иона Cl- и 2Рх атома углерода, и орбитали, изображенные красными линиями и синими линиями, представляют отрицательные и положительные амплитуды. Кроме того, фиг. 9 (а) демонстрирует, что позиция границы между отрицательными и положительными амплитудами, где вероятность существования электрона HOMO равна "0", располагается с правой стороны ядра атома водорода. Таким образом, окружающая вероятность существования электрона HOMO уменьшается, и значение полного атомного заряда водорода возрастает когда положение ядра атома водорода перемещается в правую сторону на фиг. 9 (а), и расстояние между ядрами атомов углерода и водорода возрастает. Кроме того, значение полного атомного заряда водорода достигает значения насыщения, когда положение ядра атома водорода, по существу, достигает позиции границы.
Самая низкая занятая молекулярная орбиталь, показанная на фиг. 9 (b), в основном, содержит атомные орбитали 33 иона Cl- и 1S атома водорода, и эта молекулярная орбиталь, в частности, доходит до позиции ядра атома углерода. Кроме того, вероятности существования молекулярных орбиталей вокруг иона Cl-, которые относятся к не только самой низкой занятой молекулярной орбитали, но и к другим молекулярным орбиталям, имеют тенденцию перетекать к атому углерода, когда положение ядра атома водорода перемещается в правую сторону на фиг. 9 (b). Таким образом, значение полного атомного заряда углерода уменьшается, когда расстояние между ядрами атомов углерода и водорода возрастает, как показано на фиг. 8.
Фиг. 8 демонстрирует электрические дипольные моменты μ в зависимости от отклонений расстояния между ядрами атомов углерода и водорода, и электрический дипольный момент μ получается путем подстановки полных атомных зарядов углерода и водорода в формулу (А-13).
[фор. 13]

Рассмотрим случай, когда вектор электрического дипольного момента μ параллелен оси X, то есть, случай, когда вектор электрического дипольного момента μ выражается формулой 50:
[фор. 50]

Согласно фиг. 10, каждый параметр формулы (А-50) имеет следующее значение:
[фор. 59]

4.6.4) Длины волны поглощения света и светопоглощательные способности соответствующих полос поглощения
В таблице 5 приведены волновые числа, длины волны и отношения вероятностей перехода для асимметричного растяжения Cl--Н-С, и отношение вероятностей перехода соответствует значению относительной светопоглощательной способности. С использованием формулы 44
[фор. 44]

можно вычислить волновые числа и длины волны, и каждая εm получается путем подстановки значений (А-57) и (А-58) в формулу (А-38). Кроме того, каждую B0m можно вычислить путем решения совместного ур. (А-53) и подстановки ур. (А-54) и (А-55) в формулу (А-56).
[фор. 53]

[фор. 54]

[фор. 55]

[фор. 56]
В таблице 5 указано, что основное волновое число равно 2283 см-1, и в таблице 3 указано, что соответствующее значение равно 2480 см-1. Считается, что небольшое различие между 2283 см-1 и 2480 см-1 имеет место потому, что таблица 3 получается путем аппроксимации гармонических колебаний, и таблица 5 получается с учетом членов ангармонических колебаний.
Таблица 5 демонстрирует, что значение относительной светопоглощательной способности 1-го обертона (отношение вероятностей перехода B02/B01) очень мало, и значения относительной светопоглощательной способности 2-го и 3-его обертонов еще меньше.
Если устройство измерения жизнедеятельности имеет особое приспособление для обнаружения малого сигнала, как описано ниже, может оказаться достаточным обнаруживать полосы поглощения в отношении 2-го и 3-го обертонов.
Таблица 5 относится к конкретным переходам из основного состояния 0> в одно из возбужденных состояний |m> (m≠0). Этот вариант осуществления, однако, может обнаруживать другую полосу поглощения, связанную с другим переходом, между возбужденными состояниями |m> (m≠0).
4.7) Рассмотрение обнаружимого диапазона в настоящем примерном варианте осуществления
Возникают большие ошибки считывания, когда значение, полученное в формуле (А 57), считывается из фиг. 5, и когда значение, полученное в формуле (А 59), считывается из фиг. 10. В связи с этим, ожидаются некоторые различия между теоретически оцененными значениями, приведенными в таблице 5, и фактическими значениями. Различия, в таком случае, в общем случае, должны составлять около ±20% (в лучшем случае, ±10%). Соответственно, нижний предел длины волны света в ближнем инфракрасном диапазоне, применяемой в настоящем примерном варианте осуществления, оценивается равным 1,05×(1-0,1)=0,945 мкм, или 1,05×(1-0,2)=0,840 мкм при большей оцениваемой ошибке.
Однако, когда свет 3-го обертона, указанного в таблице 5, не используется для измерения, и только свет 2-го обертона или менее используется для измерения, нижний предел длины волны света в ближнем инфракрасном диапазоне, применяемой в настоящем примерном варианте осуществления, оценивается равным 1,42×(1-0,1)=1,278 мкм, или 1,42×(1-0,2)=1,136 мкм при большей оцениваемой ошибке.
Кроме того, когда свет 2-го обертона или более, указанного в таблице 5, не используется для измерения, и только свет 1-го обертона используется для измерения, нижний предел длины волны света в ближнем инфракрасном диапазоне, применяемой в настоящем примерном варианте осуществления, оценивается равным 2,16×(1-0,1)=1,944 мкм, или 2,16×(1+0,1)=2,376 мкм, или 2,16×(1-0,2)=1,728 мкм, или 2,16×(1+0,2)=2,592 мкм при большей оцениваемой ошибке.
Ниже будет описан верхний предел длины волны инфракрасного излучения, подлежащей использованию в способе измерения, представленном в настоящем примерном варианте осуществления.
Что касается соотношения между длиной волны (волновым числом) полосы поглощения, измеренной в инфракрасном свете, и внутримолекулярными колебаниями, обуславливаются следующие колебания в порядке возрастания длины волны поглощения (в порядке убывания волнового числа): локальные колебания функциональных групп, колебания главной цепи молекулы, колебания всей молекулы, и вращение всей молекулы.
Соответственно, высокоскоростное изменение совместно с вышеупомянутой "локальным изменением состояния в молекуле" соответствует измерению "локальных колебаний" или "колебаний главной цепи молекулы" из них.
Между тем, результаты анализа колебательной моды, возникающей, когда ион натрия присоединяется к карбоксильной группе с образованием ионной связи, таковы: [А] согласно разделу 3.3, значения волнового числа (длины волны) полосы поглощения, соответствующей скелетным колебаниям  , составляют от 260 до 291 см-1 (от 34,4 до 38,5 мкм); и [В] значение волнового числа (длина волны) полосы поглощения, соответствующей скелетным колебаниям
, составляют от 260 до 291 см-1 (от 34,4 до 38,5 мкм); и [В] значение волнового числа (длина волны) полосы поглощения, соответствующей скелетным колебаниям  , равно 429 см-1 (23,3 мкм).
, равно 429 см-1 (23,3 мкм).
Кроме того, результат анализа колебательной моды, возникающей, когда ион калия присоединяется к карбоксильной группе с образованием ионной связи таков: согласно разделу 3.3, [С] значение волнового числа (длина волны) полосы поглощения, соответствующей скелетным колебаниям  , равно 118 см-1 (84,7 мкм); и [D] симметричные телескопические колебания карбоксильной группы
, равно 118 см-1 (84,7 мкм); и [D] симметричные телескопические колебания карбоксильной группы  при волновом числе (длине волны) 1570 см-1 (6,37 мкм) сильно ограничены вследствие присоединения иона калия.
при волновом числе (длине волны) 1570 см-1 (6,37 мкм) сильно ограничены вследствие присоединения иона калия.
Соответственно, необходимо рассматривать вышеупомянутые значения как часть диапазона применения (обнаружимого диапазона) настоящего примерного варианта осуществления. Однако, до этого рассмотрения, [Е] согласно разделу 3.2, значение волнового числа (длина волны) полосы поглощения, соответствующей скелетным колебаниям -N+(СН3)3Cl-, равно 2465 см-1 (4,06 мкм) (среднее значений 2480 см-1 для PCLN и 2450 см-1 для SMLN), тогда как значение диапазона волн равно 2283 см-1 в разделе 4.6.4. В связи с этим, необходимо принимать во внимание такое небольшое различие. Как описано в разделе 4.6.4, причина этого небольшого различия состоит в том, что «результат колебательного анализа в разделе 3. 1 получается на основании аппроксимации гармонических колебаний», тогда как «раздел 4.6.4 учитывает члены ангармонических колебаний».
Соответственно, можно сказать, что длины волны L измерения, перечисленные в [A]-[D], могут изменяться до (2465/2283)×L в зависимости от вычислительной модели. Кроме того, значения, представленные в [А]-[Е] являются всего лишь теоретически оцененными значениями, и ожидается некоторое различие до около ±20% относительно фактических значений, как описано выше. Таким образом, нижний предел экспериментальных значений на основании [А]-[Е] оценивается как L×(1-0,2), и их верхний предел оценивается как (2465/2283)×L×(1+0,2).
В связи с этим, диапазоны применения (обнаружимые диапазоны) настоящего примерного варианта осуществления для обнаружения каждого из явлений [А]-[Е] с учетом вышеприведенных реляционных формул будут следующими:
[А] Скелетные колебания  от 27,5 до 49,9 мкм (34,4×0,8≈27,5, (2465/2283)×38,5×1,2≈49,9);
от 27,5 до 49,9 мкм (34,4×0,8≈27,5, (2465/2283)×38,5×1,2≈49,9);
[B] Скелетные колебания  18,6 до 30,2 мкм;
18,6 до 30,2 мкм;
[C] Скелетные колебания  от 67,8 до 110 мкм;
от 67,8 до 110 мкм;
[D] Симметричные телескопические колебания  от 5,10 до 8,25 мкм; и
от 5,10 до 8,25 мкм; и
[Е] Скелетные колебания -N+(СН3)3Cl- (раздел 3.2) => от 3,25 до 5,26 мкм.
С вышеприведенной общей точки зрения, желательно, чтобы длина волны инфракрасного излучения, подлежащая использованию в способе измерения настоящего примерного варианта осуществления, составляла, по меньшей мере, 110 мкм, или менее (значение волнового числа 91,1 см-1 или более), ввиду верхнего предела [С].
Соответственно, чтобы подытожить вышеприведенное рассмотрение, диапазон длин волны света, подлежащего использованию в настоящем примерном варианте осуществления должен составлять "от 0,840 мкм до 110 мкм" в качестве максимального диапазона и "от 2,592 мкм до 110 мкм" в качестве минимального диапазона.
Теперь рассмотрим влияние длины волны поглощения воды. Живой объект, по большей части, образован молекулами воды. Таким образом, при освещении электромагнитными волнами для измерения или обнаружения динамических жизнедеятельностей в живом объекте, поглощение электромагнитных волн молекулами воды будет большой проблемой. Соответственно, настоящий примерный вариант осуществления предусматривает использование диапазона длин волны, где поглощение молекулами воды сравнительно мало. Согласно В. Alberts et. al.: Essential Cell Biology (Garland Publishing, Inc. 1998), p. 68, фиг. 2-24, состав химического соединения, составляющий животную клетку (включающий в себя неорганические ионы) на 70% по весу образован молекулами воды. Кроме того, 15% из оставшихся 30% состава занимают белки, после которых следует 6% РНК, 4% ионов/малых молекул, 2% полисахаридов и 2% фосфолипидов. При этом характеристика поглощения света белков изменяется в зависимости от третичной структуры в клетке, что затрудняет указание диапазона длин волны поглощения для полосы поглощения общих белков. В связи с этим, в настоящем примерном варианте осуществления обращается внимание на "характеристику поглощения света молекулы воды", поскольку [1] молекулы воды включены в животную клетку в чрезвычайно большом количестве, и [2] их характеристика поглощения света определяется вследствие их стабильной молекулярной структуры, и диапазон длин волны со сравнительно малым поглощением света молекулой воды используется для обнаружения динамических жизнедеятельностей в живом объекте. Это позволяет осуществлять сравнительно стабильное и точное измерение или обнаружение, одновременно препятствуя поглощению света обнаружения жизнедеятельности молекулами воды вдоль пути. Yukihiro Ozaki/Satoshi Kawata: Kinsekigai bunkouhou (Gakkai Shuppan Center, 1996), стр. 12, стр. 120, стр. 122 или стр. 180 описывает максимальную длину волны поглощения молекулы воды, и настоящий примерный вариант осуществления обеспечит объяснение с использованием описанных здесь значений.
Соответствующие центральные длины волны полос поглощения молекулы воды, соответствующие симметричным телескопическим колебаниям и антисимметричным телескопическим колебаниям, равны 2,73 мкм и 2,66 мкм. Кроме того, в диапазоне длин волны, где длины волны превышают вышеупомянутые длины волны, поглощение света происходит за счет вращения молекулы водорода. Соответственно, в настоящем примерном варианте осуществления, для измерения динамических жизнедеятельностей в живом объекте, в качестве границы принимается длина волны 2,50 мкм, которая немного меньше 2,66 мкм, и измерение осуществляется с использованием электромагнитных волн в диапазоне длин волны, имеющем длину волны, которая меньше граничного значения (в частности, в пределах от 0,840 мкм до 2,50 мкм с учетом вышеприведенного рассмотрения).
С другой стороны, в ближнем инфракрасном диапазоне, полоса поглощения, соответствующая комбинациям антисимметричных телескопических колебаний и деформационных колебаний молекулы воды, находится на центральной длине волны 1,91 мкм. В связи с этим, другие варианты осуществления могут использовать, для измерения, электромагнитные волны в диапазоне длин волны за исключением этой полосы поглощения. В частности, для измерения используется свет 1-го обертона (имеющего длину волны 2,16 мкм), как показано в таблице 5. Однако, как было упомянуто выше, ошибка считывания примерно от ±10% до ±20% возникает при считывании значения из фиг. 5. С учетом этой ошибки считывания, в другом примерном варианте осуществления используются электромагнитные волны не менее 2,16×(1-0,05)=2,05 мкм, но не более 2,16×(1+0,15)=2,48 мкм.
Кроме того, полоса поглощения, соответствующая комбинациям симметричных телескопических колебаний и антисимметричных телескопических колебаний молекулы воды, находится на центральной длине волны 1,43 мкм. В связи с этим, для другого применяемого варианта осуществления, можно использовать свет в диапазоне длин волны между вышеупомянутой длиной волны и 1,9 мкм (в частности, свет с длиной волны не менее 1,5 мкм, но не более 1,9 мкм во избежание центральной длины волны полосы поглощения молекулы воды), или можно использовать свет в диапазоне длин волны, имеющем длину волны, которая меньше 1,43 мкм. В качестве электромагнитной волны для измерения, соответствующей последнему случаю, для измерения используется свет 3-го обертона (имеющего длину волны 1,05 мкм), как показано в таблице 5. С учетом вышеупомянутой ошибки считывания, конкретная длина волны, подлежащий использованию, в этом случае составляет:
1,05×(1-0,2)=0,840 мкм, или более, но 1,05×(1+0,3)=1,37 мкм, или менее.
Между тем, другие диапазоны длин волны можно задавать в качестве применяемого варианта осуществления, а также вышеупомянутые длины волны. Таким образом, как описано ниже, диапазоны длин волны можно задавать так, чтобы обходить диапазон длин волны, где присутствует поглощение "индикатором концентрации кислорода", существующим в живой ткани. Например, при освещении ладони или пальца ближним инфракрасным светом, можно наблюдать рисунок кровеносных сосудов вокруг ее/его поверхности. Дело в том, что гемоглобин, присутствующий в кровеносных сосудах, поглощает ближний инфракрасный свет. Таким образом, в случае обнаружения жизнедеятельности на участке тыльной стороны кровеносных сосудов (за кровеносными сосудами), расположенных вблизи поверхности живого объекта, существует опасность того, что свет обнаружения будет поглощаться кровеносными сосудами в середине пути света обнаружения, и отношение С/Ш сигнала обнаружения будет снижаться. Помимо гемоглобина, миоглобин и цитохромоксидаза также имеют полосы поглощения в ближнем инфракрасном диапазоне, и спектр поглощения ближнего инфракрасного диапазона изменяется между состоянием оксигенации и состоянием деоксигенации. По этой причине, эти вещества называются индикатором концентрации кислорода. Кроме того, согласно F.F. Jobsis: Science vol. 198 (1977), p. 1264-p.1267, цитохромоксидаза и гемоглобин имеют полосу слабого поглощения на длинах волны от 0,780 мкм до 0,870 мкм. Соответственно, с учетом общего диапазона ошибок измерения ±0,005 мкм, если свет обнаружения, подлежащий использованию в настоящем примерном варианте осуществления или применяемом варианте осуществления, имеет длину волны 0,875 мкм или более, сигнал обнаружения жизнедеятельности стабильно получается без какого-либо влияния индикаторов концентрации кислорода (на поглощение света). С этой точки зрения, вышеупомянутые диапазоны длин волны «от 0,840 мкм до 110 мкм», «от 0,840 мкм до 2,50 мкм» или «не менее 0,840 мкм, но не более 1,37 мкм» будут рассматриваться как, соответственно, «от 0,875 мкм до 110 мкм», «от 0,875 мкм до 2,50 мкм» или «не менее 0,875 мкм, но не более 1,37 мкм». В случае, когда используемые длины волны света обнаружения или света управления жизнедеятельностью определяются таким образом, даже если индикатор концентрации кислорода существует в середине пути света обнаружения или пути свет управления, свет обнаружения или свет управления не поглощается, что позволяет поддерживать отношение С/Ш сигнала обнаружения жизнедеятельности и осуществлять стабильное управление жизнедеятельностью.
На Фиг. 11, 12 и 13 показаны изображения, демонстрирующие сравнения качественных показателей между обнаружением изменения потенциала мембраны и обнаружением изменения концентрации кислорода в крови с соответствующих точек зрения пространственного разрешения, временного разрешения и точности обнаружения.
Как описано выше, пространственное разрешение в традиционном методе 1 составляет порядка 3 см (см. Фиг. 11), и говорят, что пространственное разрешение в случае магнитного обнаружения с использованием устройство фМРТ составляет порядка нескольких мм. В этом случае, как показано на фиг. 11, обнаруживается среднее значение концентрации кислорода в крови, текущей во множестве капилляров 28 в этом участке. По сравнению с этим, в случае обнаружения изменения потенциала мембраны, пространственное разрешение составляет порядка длины волны света обнаружения, описанной выше.
Однако в случае обнаружения потенциала действия одного нейрона в качестве примера обнаружения изменения потенциала клеточной мембраны, среднее расстояние между соседними нейронами соответствует существенному пространственному разрешению. Говорят, что среднее расстояние между соседними нейронами в коре головного мозга человека составляет порядка 20 мкм.
Таким образом, эти пространственные разрешения различаются примерно в 100 раз. Это различие показано на фиг. 11 в виде модельного изображения. Таким образом, в случае, когда изменение концентрации кислорода в крови обнаруживается с использованием света в ближнем инфракрасном диапазоне наподобие традиционного метода 1, среднее значение обнаруживается на участке диаметром 3 см. Напротив, в этом примерном варианте осуществления, можно по отдельности обнаруживать потенциал действия каждого единичного тела 17 пирамидальной клетки или тела 18 звездчатой клетки на участке.
С другой стороны, как будет описано ниже в разделе 6.3.1, в настоящем примерном варианте осуществления, в котором обнаруживается изменение потенциала мембраны, размер (размер апертура) светопропускающей секции 56 в двухмерном жидкокристаллическом затворе 51, как показано на фиг. 18 или 19 можно сделать адекватным для обнаружения активности групповой единицы множества нейронов, например, столбчатой единицы (полной частоты возбуждения набора множества нейронов, например, столбца). Поскольку столбец имеет форму цилиндра (или тела с прямоугольными гранями) диаметром примерно от 0,5 до 1,0 мм и высотой почти 2 мм, преимущество состоит в возможности беспрепятственно доводить пространственное разрешение до вышеупомянутых значений (или ниже этих значений) для обнаружения активности в расчете на столбчатую единицу.
Диапазон размеров единицы обнаружения
Как описано выше, единицу обнаружения в настоящем примерном варианте осуществления можно задавать в пределах от единицы одного нейрона (или конкретной области в аксоне) или единицы одной мышечной клетки (или единица нервно-мышечного синапса), до групповой единицы множества нейронов (или мышечных клеток). Таким образом, в точке обнаружения жизнедеятельности, локальный участок, образованный одной или более клетками, устанавливается равным единичной единице для обнаружения, и характеристика в расчете на единицу обнаружения (в локальном участке), соответствующая электромагнитной волне, обнаруживается для обнаружения жизнедеятельности.
Кроме того, эта электромагнитная волна представляет собой свет в ближнем инфракрасном диапазоне или инфракрасный свет, имеющий длину волны в описанном здесь диапазоне (раздел 4.7), или, альтернативно, электромагнитной волной, которой освещается точка обнаружения жизнедеятельности для обнаружения жизнедеятельности с использованием ядерного магнитного резонанса, что будет объяснено ниже в главе 5. Кроме того, когда жизнедеятельность обнаруживается с использованием ядерного магнитного резонанса, можно использовать либо спектроскопию непрерывной волны CW (непрерывной волны), либо спектроскопию импульсного FT (преобразования Фурье).
Желательно, чтобы размер единицы обнаружения (локального участка) в настоящем примерном варианте осуществления находился в пределах от 1 см от длины волны электромагнитной волны, используемой для обнаружения, и более желательно, не менее 10 мкм, но не более 3 мм, по следующей причине. Если размер выражается в количестве клеток, включенных в эту единицу обнаружения (локальный участок), желательно, чтобы количество клеток было не менее 1, но не более 100 миллионов, и особо желательно, не менее 1, но не более 2 миллионов.
Ниже описан диапазон размеров единицы обнаружения (локального участка). Согласно теории дифракции, электромагнитная волна сужается до своего размера длины волны (дифракционного предела). Кроме того, известно, что потенциалозависимые Na+ ионные каналы, которые тесно связаны с нейронным потенциалом действия, широко распределены по области аксонного корня в теле клетки. В связи с этим, в случае, когда обнаруживается потенциал действия только одного нейрона, эффективность обнаружения дополнительно повышается за счет концентрации света вокруг этого аксонного корня вместо широкого освещения всего тела клетки светом обнаружения. Следовательно, желательно, чтобы размер единицы обнаружения (локальный участок) в настоящем примерном варианте осуществления был больше длина волны электромагнитной волны, подлежащей использованию для обнаружения.
Далее будет описан верхний предел размера единицы обнаружения (локального участка) в настоящем примерном варианте осуществления. Как будет описано ниже в разделе 6.5.4 со ссылкой на фиг. 25 или 26, информация жизнедеятельности получается из движения мимической мышцы в применяемом варианте осуществления. В этом случае, достаточной точности обнаружения не удается получить при пространственном разрешении (около 3 см в диаметре: см. Фиг. 11), как описано в традиционном методе 1. Поскольку ширина века или губы человека составляет около 1 см, для получения точности обнаружения до некоторой степени или более, необходимо установить верхний предел размера единицы обнаружения (локального участка) равным 1 см. Кроме того, среднее расстояние между нейронами равно около 20 мкм, и при измерении глубинной части головного мозга с использованием куба со стороной 1 см в качестве единицы обнаружения, в эту единицу обнаружения (локальный участок) будет включено (10÷0,02)×(10÷0,02)×(10÷0,02)≈100 миллионов нейронов.
Далее рассмотрим случай, когда единица обнаружения (локальный участок) задана как единица кратного целого вышеупомянутого столбца. Как описано выше, поскольку высота одного столбца (толщина спинномозгового серого вещества в коре головного мозга) равна 2 мм, в единице обнаружения, в среднем, будет выравниваться 2÷0,02=100 нейронов. Когда жизнедеятельность обнаруживается в широкой перспективе, в одной единице обнаружения (локальном участке) можно одновременно обнаруживать активность примерно 10 столбцов. В этом случае, длина одной стороны единицы обнаружения (локального участка) равна 101/2×1≈3 мм. В связи с этим, в эту единицу обнаружения (локальный участок) будет включено (3÷0,02)×(3÷0,02)×100≈2 миллиона нейронов. Кроме того, когда одна сторона (или диаметр) единицы обнаружения (локального участка) устанавливается равным 0,5 мм или 1,0 мм, жизнедеятельность одного столбца можно обнаруживать как единицу обнаружения (локальный участок) (с точки зрения вышеупомянутого размера столбца). При этом количество нейронов, включенных в единицу обнаружения (локальный участок) будет равно (0,5÷0,02)×(0,5÷0,02)×100≈60,000 или (1÷0,02)×(1÷0,02)≈300,000. Соответственно, в случае обнаружения жизнедеятельности одного нейрона к жизнедеятельности столбчатой единицы, локальный участок, образованный не менее, чем 1, но не более, чем от 60,000 до 300,000 клеток, устанавливается в качестве единицы обнаружения, и ее характеристик, соответствующая электромагнитной волне, обнаруживается для обнаружения жизнедеятельности.
Временное разрешение
Обнаружение изменения концентрации кислорода в крови с использованием света в ближнем инфракрасном диапазоне фМРТ сравнивается с обнаружением изменения потенциала клеточной мембраны оптическими или магнитными средствами, описанными в настоящем примерном варианте осуществления, в отношении временного разрешения.
Наподобие традиционного метода 1, при обнаружении изменения концентрации кислорода в крови, образуется задержка около 5 с, что накладывает существенное ограничение на временное разрешение. По сравнению с этим, в случае обнаружения изменения потенциала мембраны, существует временное разрешение, которое позволяет верно воспроизводить импульсную форму волны потенциала действия длительностью примерно от 0,5 до 4 мс, возникающую в течение периода 24 нервного импульса.
Различие между ними показано в изображении на фиг. 12 (b). Когда тела 18 звездчатых клеток в позиции α и позиции γ или тело 17 пирамидальной клетки в позиции β возбуждает потенциал действия, и потенциал клеточной мембраны изменяется, уникальные колебательные моды возникают вследствие поглощения иона (или освобождение иона), как было описано в главе 3 или 4 (настоящей главе). Соответственно, когда тело клетки освещается светом, имеющим длину волны в вышеупомянутой диапазоне, этот свет поглощается и вызывает переход между уникальными колебательными модами.
В результате, как показано на фиг. 12(b), изменение 401 количества отраженного света происходит вследствие временного снижения количества отраженного света. В примере, показанном на фиг. 12(b), тело 18 звездчатой клетки в позиции а начинает возбуждение потенциала действия в момент t0 в течение времени 163 обнаружения, что заставляет тело 18 звездчатой клетки в позиции γ начинать возбуждение потенциала действия, после чего потенциал действия возбуждается тело 17 пирамидальной клетки в позиции β с небольшой задержкой. Здесь, один "усик" на фиг. 12 (b) указывает "один потенциал действия». Ввиду очень высокого временного разрешения в настоящем примерном варианте осуществления, в котором обнаруживается как таковое изменение потенциала мембраны, каждое состояние потенциала действия можно обнаруживать для каждого отдельного нейрона.
Затем, в момент tв, наступающий через 5 с после t0, когда потенциал действия начался во время 163 обнаружения, количество 48 отраженного света для света, имеющего длину волны 830 нм, и количество 47 отраженного света для света, имеющего длину волны 780 нм, начинают медленно изменяться.
Установлено, что после того, как нейрон возбуждает потенциал действия, изменения концентрации кислорода в крови не происходит, если любое из следующих явлений не продолжается: (1) недостаток АТФ в телах 17 и 18 клеток; (2) недостаток молекул кислорода в телах 17 и 18 клеток; и (3) недостаток оксигемоглобина в капилляре. 28. Таким образом, только когда потенциалы действия возбуждаются часто, как показано на фиг. 12(b), вышеупомянутые явления (1)-(3) происходят непрерывно.
Таким образом, когда потенциалы действия редко возбуждаются, как показано фиг. 13(b), концентрация кислорода в крови не изменяется, поскольку явления (1)-(3) не происходят. Поэтому, считается, что способ обнаружения изменения концентрации кислорода в крови имеет сравнительно низкую точность обнаружения жизнедеятельности. Напротив, поскольку настоящий примерный вариант осуществления, в котором обнаруживается изменение потенциала мембраны, может обнаруживать только один потенциал действия, как показано на фиг. 13 (b), преимущество состоит в возможности значительного повышения точности обнаружения, как оптическими средствами (с помощью света в ближнем инфракрасном диапазоне), так и магнитными средствами (фМРТ).
Обнаружение слабого сигнала
Как следует из значения B0m/B01, которое является отношением вероятностей перехода в опорном тоне вероятности перехода в уровнях обертонов, описанных в таблице 5, в настоящем примерном варианте осуществления обнаруживается очень слабое изменение сигнала. Таким образом, электромагнитная волна (свет в ближнем инфракрасном диапазоне), проецируемая на живой объект заранее модулируется в настоящем примерном варианте осуществления, как описано ниже.
Таким образом, отношение С/Ш сигнала обнаружения можно повысить, выделяя только компоненту сигнала, синхронизированную с сигналом модуляции из света обнаружения, возвращающегося от живого объекта. Если его период модуляции длиннее, чем интервал времени, в течение которого субъект измерения изменяется, зависящие от времени изменения субъекта измерения трудно обнаружить. Соответственно, для стабильного измерения зависящих от времени изменений субъекта измерения, необходимо установить основной период модуляции сигнала меньшим или равным 1/5 интервала времени, в течение которого субъект измерения изменяется.
В связи с этим, один примерный вариант осуществления отличается тем, что основная частота сигнала модуляции устанавливается следующим образом: 1 Гц или более (по меньшей мере, 0,2 Гц или более) для объекта, изменяющегося с интервалом, более коротким, чем 5 с; 25 Гц или более (по меньшей мере 5 Гц или более) для объекта, изменяющегося с интервалом, более коротким, чем 200 мс; и 1,25 кГц или более (по меньшей мере 250 Гц или более) для объекта, изменяющегося с интервалом, более коротким, чем 4 мс.
Далее будет описан верхний предел основной частоты модуляции и интервал зависящих от времени изменений в одном примерном варианте осуществления. В общем случае, известно, что аналоговые сигналы, имеющие ширину полосы сигнала несколько сот кГц, работают легко и стабильно, не переводя схему обнаружения в режим генерации. Кроме того, при такой ширине полосы сигнала, реализация, включающая в себя, как соединять выводы заземления в печатной схеме и т.п., стабильна даже без пристального внимания. С другой стороны, когда ширина полосы рабочего диапазона превышает 20 МГц, схема обнаружения легко переходит в режим генерации, и необходим особый метод для реализации в печатной схеме. В случае, когда потенциал действия длительностью от 0,5 до 2 мс измеряется в одном примере настоящего примерного варианта осуществления, такое высокоскоростное обнаружение сигнала не требуется. Таким образом, ширина полосы сигнал обнаружения ограничивается минимальным значением для стабилизации схемы и снижения затрат.
По вышеупомянутым причинам, основная частота модуляции ограничивается 500 кГц или менее, в частности, в одном примере настоящего примерного варианта осуществления, и интервал зависящих от времени изменений субъекта измерения устанавливается равным не менее 10 не (по меньшей мере, 2 не или более).
5] Оценка спектральных характеристик ЯМР на основании модели потенциала действия
5.1) Изменение спектральной характеристики ЯМР и оценочные значения химического сдвига в отношении потенциала действия
5.1.1) Перспектива изменения спектральных характеристик ЯМР в отношении потенциала действия
В разделе 4.7 указано, что этот вариант осуществления демонстрирует новый способ измерения жизнедеятельности, который предусматривает экспонирование живого объекта электромагнитной волне с длиной волны 0,85 мкм - 50 мкм (или 0,84 мкм - 2,5 мкм), и этот новый способ измерения может обнаруживать зависящие от времени изменения электромагнитной волны, указывающие наличие жизнедеятельности. Также согласно новому способу измерения, локальное свойство живого объекта можно измерять детально, и информацию динамической жизнедеятельности можно получить путем преобразования результатов измерения.
В этой главе 5 предложен другой вариант осуществления, который обнаруживает зависящие от времени изменения свойства ядерного магнитного резонанса в локальном участке живого объекта и преобразует результаты обнаружения в информацию динамической жизнедеятельности.
Согласно разделу 3.2, значение полного заряда в отношении ядра атома водорода изменяется, когда ион Cl- присоединяется к атому водорода из -N+(СН3)3, принадлежащего PCLN или SMLN, и образует водородную (или ионную) связь с атомом водорода. Это изменение полного заряда означает изменение молекулярных орбиталей, расположенных вокруг ядра атома водорода. Таким образом, предполагается, что свойство ядерного магнитного резонанса и соответствующее значение химического сдвига изменяются при изменении молекулярных орбиталей, расположенные вокруг ядра атома водорода, поскольку изменение молекулярных орбиталей может приводить к изменению эффекта магнитного экранирования для ядра атома водорода.
В этой главе предлагается другой вариант осуществления, который обнаруживает зависящие от времени изменения свойства ядерного магнитного резонанса или соответствующий химический сдвиг и преобразует результаты обнаружения в информацию динамической жизнедеятельности.
5.1.2) Способ вычисления с помощью другой программы квантохимического моделирования
В этой главе 5, Gaussian 09 используется в качестве программы квантохимического моделирования, и "Gaussian" принадлежит зарегистрированному товарному знаку (Gaussian 09, Revision A. 1, М.J. Frisch, G.W. Trucks, H.B. Schlegel, G.E. Scuseria, М.A. Robb, J.R. Cheeseman, G. Scalmani, V. Barone, B. Mennucci, G.A. Petersson, H. Nakatsuji, М. Caricato, X.Li, H.P. Hratchian, A.F. Izmaylov, J. Bloino, G. Zheng, J.L. Sonnenberg, М. Hada, М. Ehara, K. Toyota, R. Fukuda, J. Hasegawa, М. Ishida, T. Nakajima, Y. Honda, O. Kitao, H. Nakai, T. Vreven, J.A. Montgomery, Jr., J.E. Peralta, F. Ogliaro, М. Bearpark, J.J. Heyd, E. Brothers, K.N. Kudin, V.N. Staroverov, R. Kobayashi, J. Normand, K. Raghavachari, A. Rendell, J.C. Burant, S.S. lyengar, J. Tomasi, М. Cossi, N. Rega, J.М. Millam, М. Klene, J.E. Knox, J.B. Cross, V. Bakken, C. Adamo, J. Jaramillo, R. Gomperts, R.E. Stratmann, O. Yazyev, A.J. Austin, R. Cammi, C. Pomelli, J.W. Ochterski, R.L. Martin, K. Morokuma, V.G. Zakrzewski, G.A. Voth, P. Salvador, J.J. Dannenberg, S. Dapprich, A.D. Daniels, O. Farkas, J. B. Foresman, J.V. Ortiz, J. Cioslowski, and D.J. Fox, Gaussian, Inc. Wallingford KT, 2009).
Молекулярная структура Cl-(СН3)3N+CH2CH2OH используется для этого компьютерного моделирования для получения короткого времени и простой оценки. Этот способ вычисления также содержит два этапа вычисления для поддержания высокой точности вычисления. Первый этап вычисления служит для оптимизации молекулярной структуры и для подтверждения, полностью ли закончена оптимизация, и второй этап вычисления служит для анализа свойства ядерного магнитного резонанса.
Некоторыми ключевыми словами оптимизации являются "#Р RHF/6-31G(d) Opt Freq SCRF=(Solvent=Water,PCM)". Здесь, "RHF/6-31G(d)" означает метод аппроксимации и основные функции, используемые для последовательности вычислений, "Opt SCRF=(Solvent=Water,PCM)" означает оптимизацию в водной среде, и "Freq" используется для подтверждения оптимизированной структуры.
Также некоторыми ключевыми словами анализа ядерного магнитного резонанса являются "#Р RHF/6-31G(d) NMR SCRF=(Solvent=Water,PCM)". Здесь, "NMR" означает анализ ядерного магнитного резонанса для вычисления соответствующего значения химического сдвига. Это значение химического сдвига базируется на "5 масштаб", которое представляет значение разности между соответствующими выходными данными и основным химическим сдвигом тетраметилсилана (TMS), который был ранее вычислен (R.М. Silverstein and F.X. Webster: Spectrometric Identification of Organic Compounds 6th Edition (John Wiley & Sons, 1998) глава 4, раздел 4.7).
5.1.3) Оценивание значений химического сдвига в спектральных характеристиках ЯМР
Прежде всего, Gaussian 09 вычислял значение химического сдвига в отношении ядра атома водорода, принадлежащего метильной группе, которая включена в единичный холин (СН3)3N+CH2CH2OH без присоединения иона Cl-. Первоначально результаты вычислений были в пределах от δ2,49 м.д. до δ2,87 м.д.
Затем он вычислял значение химического сдвига в отношении ядра атома водорода, который образует водородную (или ионную) связь с ионом Cl- в молекуле Cl-(СН3)3N+CH2CH2OH, и тогда результаты вычислений были в пределах от δ3,43 м.д. до δ3,55 м.д.
Таким образом, эти результаты вычислений демонстрируют заметный переход химического сдвига между присоединением и отсоединением иона Cl-.
5.2) Рассмотрение измеримого диапазона в настоящем примерном варианте осуществления
Если ион хлора Cl- присоединяется к PCLN или SMLN на наружном слое клеточной мембраны в то время, когда нейрон возбуждает потенциал действия, спектр NMI временно достигает своего пика в пределах от δ3,43 м.д. до δ3,55 м.д. (в течение потенциала действия), и область пика в пределах от δ2,49 м.д. до δ2,87 м.д. должна уменьшаться на величину, соответствующую области пика в диапазоне от δ3,43 м.д. до δ3,55 м.д.
Соответственно, в другом применяемом варианте осуществления настоящего примерного варианта осуществления, измеряется временное увеличение пика в диапазоне от δ3,43 м.д. до δ3,55 м.д. в спектре NMI или временное уменьшение пика в диапазоне от δ2,49 м.д. до δ2,87 м.д. в спектре NMI для измерения явления потенциала действия.
Значение, вычисленное согласно компьютерному моделированию, часто имеет некоторое отличие от фактического результата измерения. Отличие оценивается в пределах от 0,45 до 0,49 м.д. В связи с этим, применяемый вариант осуществления настоящего примерного варианта осуществления измеряет зависящее от времени изменение (временное увеличение и уменьшение) области пика (или высоты пика) в диапазоне от 52,0 м.д. (2,49-0,49) до δ4,0 м.д. (3,55+0,45) в спектре NMI.
Однако применяемый вариант осуществления настоящего примерного варианта осуществления не ограничивается измерением нейронного потенциала действия, но настоящий примерный вариант осуществления применим к измерению быстрого изменения динамической жизнедеятельности в живом объекте путем обнаружения временного увеличения или уменьшения (зависящего от времени изменения) пика в конкретной области спектра NMI.
Причина такова: исходя из объяснения в разделе 4.7, явление, состоящее в том, что динамическая жизнедеятельность в живом объекте изменяется за короткое время (высокая скорость реакции) часто приводит к изменению эффекта магнитного экранирования вследствие изменения молекулярных орбиталей, расположенных вокруг протона.
Кроме того, этот другой применяемый вариант осуществления заметно отличается тем, что изменение молекулярного состояния в воде обнаруживается для измерения жизнедеятельностей. Этот другой применяемый вариант осуществления имеет техническое устройство для обнаружения конкретного изменения молекулярного состояния в водной среде, и это техническое устройство базируется на обнаружении спектральных пиков, которые отличаются от конкретных пиков, соответствующих одной или более молекулам воды в спектре ЯМР.
Говорят, что значение химического сдвига ядра атома водорода, составляющего единую молекулу воды, составляет от 50,4 м.д. до 51,55 м.д., и значение химического сдвига вследствие водородной связи между молекулами воды равно δ4,7 м.д. (R.М. Silvestein & F.М. Webster: Spectrometric Identification of Organic Compounds, 6th edition (John Wiley & Sons, Inc., 1998) см. Глава 4).
Электроотрицательность атома кислорода, связанная с водородной связью между молекулами воды, велика, на втором месте после фтора, согласно результату вычисления Полинга. Таким образом, значение химического сдвига в то время, когда формируется водородная связь с атомом за исключением атома кислорода (например, вышеупомянутым ионом хлора) меньше δ4,7 м.д., как упомянуто выше, и будет равно δ4,5 м.д. или менее с учетом запаса в 0,2 м.д.
С другой стороны, верхний предел значения химического сдвига ядра атома водорода, составляющего единую молекулу воды, равен δ1,55 м.д., но должен быть задан равным δ1,7 м.д. или более, за счет прибавления запаса в 0,15 м.д., для обхода пика молекулы воды. Ввиду вышеприведенного рассмотрения, этот другой применяемый вариант осуществления измеряет динамическую жизнедеятельность в живом объекте путем обнаружения зависящего от времени изменения области пика (или высоты пика) в пределах значения химического сдвига не менее δ1,7 м.д., но не более δ4,5 м.д. в спектре ЯМР.
В этом другом применяемом варианте осуществления, интервал зависящих от времени изменений, подлежащих обнаружению в случае обнаружения зависимых изменений области пика (или высоты пика) в спектре ЯМР, составляет не менее 10 не (по меньшей мере, 2 не или более), но не более 5 с, как было описано в разделе 4.7. Альтернативно, в зависимости от субъекта измерения, интервал может составлять не менее 10 не (по меньшей мере, 2 не или более) но не более 200 мс, или не менее 10 не (по меньшей мере, 2 не или более) но не более 4 мс.
6] Технические признаки способа обнаружения/управления жизнедеятельностью и способа измерения жизнедеятельности в настоящем примерном варианте осуществления
В главе 6 изложены основные принципы и технические признаки способа обнаружения жизнедеятельности и способа измерения жизнедеятельности в настоящем примерном варианте осуществления. Кроме того, в этой главе рассмотрен примерный вариант осуществления, подлежащий совместному использованию даже в способе управления жизнедеятельностью.
6.1) Содержание жизнедеятельности, подлежащей измерению, и признаки способа обнаружения/управления жизнедеятельностью
6.1.3) Жизнедеятельность в живом объекте от поверхностного участка до очень глубокого участка, рассматриваемая как цель обнаружения/управления
Настоящий примерный вариант осуществления предполагает жизнедеятельности в живом объекте от поверхностного участка до очень глубоких позиций в качестве целей обнаружения/управления. Для этого требуется метод выделения сигнала обнаружения жизнедеятельности из конкретного положения в трехмерном пространстве в живом объекте или метод избирательного управления жизнедеятельностью по отношению к конкретному положению.
На первой стадии настоящего примерного варианта осуществления для реализации этого, для осуществления "выравнивания точки обнаружения/управления жизнедеятельностью и ее сохранения" в живом объекте, осуществляются следующие операции: (1) интерпретация внутренней конфигурации в трех измерениях (размещения всех частей, составляющих живой объект); и (2) вычисление позиции субъекта измерения в трех измерениях и управление позицией на основании интерпретации в (1).
На второй стадии осуществляется (3) "выделение сигнала обнаружения жизнедеятельности" или "управление локальной жизнедеятельностью" в позиции, указанной в (2). Первая стадия и вторая стадия могут осуществляться последовательно с течением времени или могут осуществляться одновременно.
В дальнейшем, "обнаружение позиции точки обнаружения/управления жизнедеятельностью", осуществляемое в операциях (1) и (2) именуется «первым обнаружением». В настоящем примерном варианте осуществления, электромагнитная волна (или свет) с описанной ниже длиной волны используется для этого первого обнаружения (что будет, в частности, описано в разделе 6.2).
Кроме того, операция (3) далее именуется «вторым обнаружением». Для этого второго обнаружения, используются электромагнитные волны, включающие в себя электромагнитную волну, имеющую конкретную длину волны, или электромагнитную волну, соответствующую конкретному значению химического сдвига (что будет, в частности, описано в разделе 6.3).
Другими словами, "в настоящем примерном варианте осуществления, обнаружение или управление жизнедеятельностью в живом объекте включает в себя 'первое обнаружение, заключающееся в обнаружении электромагнитной волны', и 'второе обнаружение, заключающееся в обнаружении электромагнитных волн, включающих в себя электромагнитную волну, имеющую конкретную длину волны, или электромагнитную волну, соответствующую конкретному значению химического сдвига' или 'управление с использованием электромагнитных волн, включающих в себя электромагнитную волну конкретной длины волны'ʺ, и второе обнаружение или управление будет осуществляться на основании результата первого обнаружения. Конкретная процедура осуществляется таким образом, что позиция объекта измерения/управления в трех измерениях вычисляется посредством первого обнаружения, и сигнал обнаружения, связанный с жизнедеятельностью, получается посредством второго обнаружения из вычисленной таким образом внутренней позиции, или альтернативно, жизнедеятельность локально управляется путем освещения участка в вычисленной таким образом позиции электромагнитными волнами, включающими в себя конкретную длину волны. Однако настоящий примерный вариант осуществления не ограничивается вышеизложенным, и может осуществляться таким образом, что:
[1] позиция объекта измерения/управления в трех измерениях вычисляется посредством первого обнаружения;
[2] сигнал обнаружения, связанный с жизнедеятельностью, получается посредством второго обнаружения из вычисленной таким образом внутренней позиции; и
[3] жизнедеятельность локально управляется на основании сигнала обнаружения (путем изменения интенсивности электромагнитной волны для освещения).
Таким образом, первое обнаружение для осуществления обнаружения позиции и управления позиции точки обнаружения/управления жизнедеятельностью объединяется со вторым обнаружением для осуществления фактического обнаружения жизнедеятельности.
В настоящем примерном варианте осуществления, поскольку первое обнаружение для осуществления обнаружения позиции и управления позиции точки обнаружения жизнедеятельности осуществляется отдельно от второго обнаружения для осуществления обнаружения или управления жизнедеятельностью, секция измерения для осуществления второго обнаружения (упомянутая ниже секция обнаружения жизнедеятельности) может быть зафиксирована в положении на удалении от пользователя без непосредственного присоединения к телу пользователя. Таким образом, пользователь может двигаться вокруг, не осознавая обнаружения жизнедеятельности. Это значительно снижает нагрузку на пользователя и значительно повышает удобство.
Здесь, "электромагнитная волна, имеющая конкретную длину волны", указывает "свет, имеющий длину волны в пределах от 0,840 мкм до 50 мкм" для обнаружения "изменения потенциала мембраны в нервной системе", в то же время, указывая "свет, имеющий длину волны в пределах от 780 нм до 805 нм или 830 нм" для обнаружения "изменения концентрации кислорода в крови в окружающих участках". Кроме того, "электромагнитная волна, имеющая конкретную длину волны", указывает "инфракрасный свет, имеющий длину волны около 8,7 мкм" для обнаружения "изменения температуры посредством термографии". Ниже описана причина, по которой длина волны должна быть равна 8,7 мкм. Термография обнаруживает излучение черного тела, исходящее от поверхности живого объекта, но длина волны наибольшей интенсивности этого излучения черного тела зависит от температуры поверхности живого объекта. При вычислении длины волны наибольшей интенсивности, соответствующей температуре тела человека, получается результат 8,7 мкм/ и, таким образом, здесь используется это значение.
С другой стороны, "электромагнитная волна, соответствующая конкретному значению химического сдвига", указывает «электромагнитную волну, соответствующую значению химического сдвига в диапазоне не менее 51,7 м.д., но не более 54,5 млн.д.» как описано в разделе 5.2 для обнаружения показанной "распределения активации нейронов посредством фМРТ", в то же время, указывая "электромагнитную волну, соответствующую значению химического сдвига, соответствующему изменению магнитной восприимчивости" для обнаружения "изменения концентрации кислорода посредством фМРТ".
Между тем, в настоящем примерном варианте осуществления, электромагнитную волну, имеющую конкретную длину волны, можно обнаруживать из электромагнитных волн, естественным образом исходящих от живого объекта. Однако, поскольку такие естественным образом исходящие электромагнитные волны имеют низкую интенсивность, трудно получить сигнал обнаружения с высоким отношением С/Ш. Чтобы справиться с этим, в настоящем примерном варианте осуществления, живой объект освещается электромагнитными волнами, включающими в себя электромагнитную волну, имеющую конкретную длину волны, или электромагнитную волну, соответствующую конкретному значению химического сдвига, и, для осуществления второго обнаружения, обнаруживается свет освещения, полученный от живого объекта. Это может повышать точность обнаружения сигнала обнаружения. Кроме того, как было описано в разделе 4.7, электромагнитные волны для освещения живого объекта, можно модулировать основной частотой не менее 0,2 Гц, но не более 500 кГц, для дополнительного повышения точности сигнала обнаружения.
При этом длина волны электромагнитной волны, используемой для первого обнаружения для установки точки обнаружения или точки управления жизнедеятельностью в живом объекте для получения сигнала обнаружения жизнедеятельности посредством второго обнаружения, можно гармонизировать с длиной волны электромагнитной волны, используемой во втором обнаружении. Однако в настоящем примерном варианте осуществления, диапазон длин волны обеих электромагнитных волн задают равными разным значениям (то есть длина волны наибольшей интенсивности электромагнитной волны в распределении по частоте, используемая для первого обнаружения, устанавливается отличной от конкретной длины волны или конкретного значения химического сдвига, включенной в электромагнитные волны для второго обнаружения), для устранения помехи между электромагнитной волной, используемый для первого обнаружения, и электромагнитными волнами, используемыми для второго обнаружения или управления. В этом случае, цветовые фильтры для блокировки света конкретных длин волны располагаются на первом и втором отверстиях обнаружения (входном порту секции обнаружения сигнала), во избежание поступления электромагнитной волны, используемой для первого обнаружения в сторону второго обнаружения и наоборот.
Конкретный способ в настоящем примерном варианте осуществления, в котором электромагнитные волны для первого обнаружения и второго обнаружения или управления имеют разные длины волны, состоит в том, что: позиция субъекта измерения в трех измерениях обнаруживается с использованием камеры, обладающей чувствительностью к видимому свету; с использованием вышеупомянутого инфракрасного излучения или света в ближнем инфракрасном диапазоне, распределение концентрации воды в. живом объекте, подвергаемом обнаружению жизнедеятельности, измеряется посредством МРТ, или позиция субъекта измерения определяется с использованием КТ-сканирования; распределение концентрации воды в живом объекте, для которого сигнал обнаружения, связанный с жизнедеятельностью в позиции, обнаруживается посредством фМРТ, измеряется посредством МРТ, или позиция субъекта измерения определяется с использованием КТ-сканирования; и с использованием инфракрасного света или света в ближнем инфракрасном диапазоне, осуществляется обнаружение или управление сигналом обнаружения, связанным с жизнедеятельностью в позиции.
Далее определены термины, подлежащие использованию для предстоящих объяснений примерных вариантов осуществления. Определенные ниже термины будут использоваться и в дальнейшем. Первоначально, операция получения информации (например, интенсивности, изменения интенсивности, величины фазы, сдвига фазы, значения частоты или изменения частоты), связанной с определенной электромагнитной волной, определяется как «обнаружение». В объяснении, как описано выше, это "обнаружение" имеет два определения, "первое обнаружение" и "второе обнаружение». Кроме того, это второе обнаружение именуется "обнаружением жизнедеятельности" в узком смысле. Однако, в ряде случаев, первое обнаружение и второе обнаружение можно, в общем случае, именовать «обнаружением жизнедеятельности». Полученный в результате обнаружения сигнал именуется "сигналом обнаружения", и сигнал, полученный в результате обнаружения жизнедеятельности, именуется "сигналом обнаружения жизнедеятельности" в настоящем описании изобретения.
Соответственно, сигнал, непосредственно полученный из физического явления, показанного в столбце "физическое явление, порождающее сигнал и способ обнаружения" соответствует «сигналу обнаружения, полученному в результате второго обнаружения», но, если в дальнейшем это не приводит к разночтениям в интерпретации терминов, сигнал можно, в общем случае, именовать «сигналом обнаружения».
Как описано выше, из всех биологических активностей, биологическая активность, состояние которой может изменяться в течение времени, в частности, совместно с физико-химическим явлением, включена в понятие "жизнедеятельность». Приведено объяснение, сосредоточенное на активности нервной системы в качестве примера жизнедеятельности, но настоящий примерный вариант осуществления этим не ограничивается, как описано выше, и обнаружение всякой активности, соответствующей вышеупомянутым жизнедеятельностям, будет включено в объем настоящего примерного варианта осуществления. Альтернативно, в настоящем примерном варианте осуществления, "состояние или изменение состояния (зависящее от времени изменение или пространственное изменение) живого объекта, которое обнаруживается с помощью электромагнитной волны в бесконтактном режиме" можно определить как жизнедеятельность.
Между тем, примеры жизнедеятельности, сосредоточенные на активности нервной системы, охватывают «передачу сигнала (путь пропускания или состояние пропускания) в нервной системе», «реакцию отражения», «бессознательную активность», «познавательную реакция», «реакцию распознавания/различения», «эмоциональную реакцию», «обработку информации», «процесс мышления/созерцания» и пр. Эти определенные типы "управляемой жизнедеятельности более высокой степени" определяются как "информация жизнедеятельности" (симптом шизофрении у пациента частично управляются до некоторой степени и, таким образом, включены в управляемую жизнедеятельность более высокой степени).
Альтернативно, "интерпретируемую или различимую информацию о составном действии, которое обуславливает активность (например, между клетками)" также можно определить как «информацию жизнедеятельности». Даже если растительная или микробная активность включают в себя то или иное управляемое составное действие, такая активность также включается в информацию жизнедеятельности. Для получения этой информации жизнедеятельности, необходимо интерпретировать сигнал обнаружения жизнедеятельности, включающий в себя сигнал динамической жизнедеятельности в живом объекте и генерировать информацию жизнедеятельности. Процесс генерации информации жизнедеятельности из этого сигнала обнаружения жизнедеятельности именуется «интерпретацией жизнедеятельности». Кроме того, процесс, длящийся от получения сигнала обнаружения жизнедеятельности до генерации информации жизнедеятельности, может именоваться «измерением биологической активности».
Кроме того, часть, которая принимает свет, включающий в себя свет, имеющий конкретную длину волны, с сигналом, связанным с жизнедеятельностью, или электромагнитные волны, включающие в себя электромагнитную волну, соответствующую конкретному значению химического сдвига, с сигналом, связанным с жизнедеятельностью, и обнаруживает там сигнал обнаружения жизнедеятельности, именуется «секцией обнаружения сигнала». Кроме того, часть в секции обнаружения сигнала, которая принимает свет или электромагнитные волны и преобразует его/их в электрический сигнал, именуется "секцией фотообнаружения жизнедеятельности" в широком смысле, и способ приема света или электромагнитных волн и преобразования его/их в электрический сигнал именуется "способом фотообнаружения жизнедеятельности». Кроме того, секция электрического обнаружения, включающая в себя обработку усиления сигнала для электрического сигнала, полученного секцией фотообнаружения в секции обнаружения сигнала, именуется «схемой обнаружения жизнедеятельности».
В секции фотообнаружения жизнедеятельности, имеющей конфигурацию, показанную в разделе 6.3.3 в качестве одного примерного варианта осуществления, катушка 84 обнаружения обнаруживает электромагнитную волну, соответствующую конкретному значению химического сдвига (катушка 84 обнаружения преобразует ее в электрический сигнал). С другой стороны, в другом примерном варианте осуществления, секция фотообнаружения жизнедеятельности, имеющая конфигурацию, показанную в разделе 6.3.1 или 6.3.2, осуществляет фотоэлектрическое преобразование света, имеющего конкретную длину волны (света в ближнем инфракрасном диапазоне или инфракрасного света). В примерных вариантах осуществления секции фотообнаружения жизнедеятельности, оптическая система, используемая для фотоэлектрического преобразования света, включающего в себя вышеупомянутый свет, имеющий конкретную длину волны (и расположенная как входная часть фотоэлектрического преобразования), именуется "оптической системой для обнаружения жизнедеятельности».
При этом, поскольку сигнал обнаружения жизнедеятельности имеет высокое отношение С/Ш в настоящем примерном варианте осуществления, можно использовать такой способ, в котором электромагнитная волна, имеющая конкретную длину волны (или соответствующая конкретному значению химического сдвига) модулируется заранее определенной основной частотой, благодаря чему, живой объект в качестве субъекта измерения (или цели обнаружения) освещается модулированной электромагнитной волной. секция, которая генерирует, по меньшей мере, электромагнитную волну (или свет), имеющую(ий) конкретную длину волны (или соответствующую(ий) конкретному значению химического сдвига) в этом случае именуется «светоизлучающей секцией». Полная секция, образованная секцией обнаружения сигнала и светоизлучающей секцией, именуется "секцией обнаружения жизнедеятельности». Здесь, в примерных вариантах осуществления, которые не предусматривают светоизлучающей секции, секция обнаружения жизнедеятельности соответствует секции обнаружения сигнала.
С другой стороны, секция, которая выравнивает точку обнаружения жизнедеятельности и осуществляет первое обнаружение для сохранения позиции в ней, как описано выше, именуется "секцией мониторинга позиции в отношении точки обнаружения жизнедеятельности" или просто «секцией мониторинга позиции». Полная секция, образованная "секцией обнаружения жизнедеятельности" и "секцией мониторинга позиции в отношении точки обнаружения жизнедеятельности" именуется «секцией обнаружения жизни». В этой секции обнаружения жизни, между секцией мониторинга позиции в отношении точки обнаружения жизнедеятельности и секцией обнаружения жизнедеятельности передается сигнал. Таким образом, как было описано в начале этого раздела, обнаружение жизнедеятельности осуществляется секцией обнаружения жизнедеятельности на основании результата обнаружения позиции, полученного секцией мониторинга позиции.
6.2) Способ выравнивания и сохранения точки обнаружения/управления жизнедеятельностью
С использованием первого способа обнаружения, описанного в разделе 6.1.3, ниже описан способ, в котором захватывается пространственное расположение в трех измерениях в (1), и, на основании результата, вычисляется точка обнаружения жизнедеятельности или точка управления жизнедеятельностью (позиция субъекта измерения) в трех измерениях и осуществляется управление позицией в (2).
6.2.1) Способ задания позиции обнаружения путем обнаружения изображения в сечении, включающего в себя точку обнаружения/управления
Ниже описан основной принцип обнаружения изображения в сечении, включающего в себя точку обнаружения, которая используется в секции мониторинга позиции в отношении точки обнаружения жизнедеятельности, в настоящем примерном варианте осуществления, со ссылкой на фиг. 14. Заметим, что точки 30 обнаружения жизнедеятельности, показанные на фиг. 14, 15, 17, 1-8, 20 и 23, соответствуют целевому участку для управления жизнедеятельностью, подвергаемому локальному воздействию в живом объекте в настоящем примерном варианте осуществления. Свет (или электромагнитные волны) проецируется через объектив 31 на широкий участок вокруг точки 30 обнаружения жизнедеятельности, наподобие светового микроскопа отражательного типа, который не показан на фиг. 14. Затем проецируемый таким образом свет (или электромагнитные волны) диффузно отражается в точке 30 обнаружения жизнедеятельности, образованной двухмерной плоскостью, включающей в себя соответствующие точки α, β и γ, и свой периферийный участок. С использованием этого явления, свет, диффузно отраженный на двухмерной плоскости (в точке 30 обнаружения жизнедеятельности), включающей в себя соответствующие точки α, β и γ, используется как свет обнаружения по отношению к точке обнаружения жизнедеятельности.
Между тем, для нахождения (обнаружения) точки, из которой получается сигнал обнаружения жизнедеятельности в живом объекте, или точки, где управляется жизнедеятельность (т.е. точки 30 обнаружения жизнедеятельности), необходимо интерпретировать внутреннюю структуру на двухмерной плоскости, включающей в себя соответствующие точки α, β и γ (интерпретировать каждую часть, составляющую живой объект, и захватывать ее размещение) в отношении (1) в разделе 6.1.3. Аналогично обнаружению изменения интенсивности света, диффузно отраженного на поверхности, когда поверхностная структура захватывается традиционным световым микроскопом, измеряется изменение интенсивности света, диффузно отраженного в каждой точке на двухмерной плоскости.
Однако, в настоящем примерном варианте осуществления, необходимо обнаруживать изображение (картину сигнала обнаружения) в конкретном сечении в живом объекте, иначе, чем с помощью традиционного светового микроскопа. Таким образом, настоящий примерный вариант осуществления использует признак конфокальной системы для обнаружения сечения в живом объекте.
Таким образом, булавочное отверстие 35 располагается в позиции заднего фокуса линзы 32 обнаружения, благодаря чему, только свет обнаружения, проходящий через это булавочное отверстие, обнаруживается фотодетектором 36. Свет, диффузно отраженный в точках, за исключением точки 30 обнаружения жизнедеятельности, и проходящий через объектив 31, становится непараллельными пучками в середине оптического пути 33 света обнаружения и образует очень широкое сечение пятна (очень большой диаметр пятна) на булавочном отверстии 35, так что значительная часть света не может пройти через булавочное отверстие 35.
Соответственно, поскольку фотодетектор 36 может обнаруживать только параллельный свет обнаружения на оптическом пути 33 света обнаружения между объективом 31 и линзой 32 обнаружения, можно обнаруживать только свет обнаружения, излучаемый из позиции передней фокальной плоскости объектива 31. Таким образом, благодаря синхронизации точки 30 обнаружения жизнедеятельности с позицией передней фокальной плоскости объектива 31, фотодетектор 36 может обнаруживать сигнал обнаружения, полученный только из точки 30 обнаружения жизнедеятельности.
Здесь, отражающее зеркало (гальванометрическое зеркало) 34, которое может наклоняться в двух осевых направлениях, располагается между объективом 31 и линзой 32 обнаружения. До отклонения отражающего зеркала (гальванометрического зеркала) 34, фотодетектор 36 может обнаруживать только свет обнаружения, излучаемый из позиции α в точке 30 обнаружения жизнедеятельности. Кроме того, когда отражающее зеркало (гальванометрическое зеркало) 34 отклоняется в правую сторону, можно обнаруживать только свет обнаружения, излучаемый из позиции γ, и когда отражающее зеркало 34 отклоняется в левую сторону, можно обнаруживать только свет обнаружения, излучаемый из позиции β.
Фиг. 14 демонстрирует случай, когда отражающее зеркало 34 отклоняется в поперечном направлении, но настоящий примерный вариант осуществления не ограничивается этим, и когда отражающее зеркало 34 отклоняется в направлении вперед-назад, можно обнаруживать свет обнаружения, излучаемый из позиции, отклоненной в направлении, перпендикулярном плоскости страницы. Таким образом, когда отражающее зеркало (гальванометрическое зеркало) 34 осуществляет сканирование в двуосных направлениях, и количество света, регистрируемое фотодетектором 36, отслеживается с течением времени синхронно с наклоном, из света, диффузно отраженного в точке 30 обнаружения жизнедеятельности, можно получить двухмерную картину сигнала обнаружения.
В отношении (2) раздела 6.1.3, ниже описаны способ обнаружения и способ коррекции (способ выравнивания) направления смещения и величины смещения текущей позиции обнаружения для точки 30 обнаружения жизнедеятельности в двухмерном направлении под прямыми углами к оптической оси объектива 31. Хотя это не показано в оптической системе, описанной со ссылкой на фиг. 14, деталь, обладающая упругостью, например, пластинчатая или проволочная пружина располагается между объективом 31 и фиксирующей деталью, что позволяет объективу 31 перемещаться в трехосных направлениях. Кроме того, три звуковые катушки соединены с объективом, и три звуковые катушки частично располагаются в постоянном магнитном поле, генерируемом неподвижным магнитом (не показан). Соответственно, когда ток течет в каждой из звуковых катушек, объектив может перемещаться в отдельном направлении соответствующей одной из трех осей под действием электромагнитной силы.
В настоящем примерном варианте осуществления, заранее определяется точка 30 обнаружения жизнедеятельности, в которой предполагается выделение сигнала обнаружения жизнедеятельности ((3) как описано в разделе 6.1.3), и полученная из нее картина сигнала обнаружения заранее сохраняется. Эта картина сигнала обнаружения указывает информацию двухмерного изображения, которая получается как сигнал обнаружения от фотодетектора 36, синхронизированный со сканированием в двуосных направлениях отражающего зеркала (гальванометрического зеркала) 34, и который указывает распределение количества диффузно отраженного света в точке 30 обнаружения жизнедеятельности. Объектив 31 располагается в надлежащем положении вблизи точки 30 обнаружения жизнедеятельности, и двухмерная картина сигнала обнаружения (сигнала мониторинга), полученная от фотодетектора 36, синхронизированная получаемым при этом наклоном отражающего зеркала (гальванометрического зеркала) 34 в двуосном направлении, сравнивается с вышеупомянутой заранее сохраненной картиной сигнала обнаружения.
При этом с использованием способа согласования картин, вычисляются направление смещения и величина смещения позиции обнаружения между информацией двухмерного изображения, указанной полученной в данный момент картиной сигнала обнаружения, и идеальной позицией в направлении под прямыми углами к оптической оси объектива 31 (центральной позицией изображения в информации двухмерного изображения, указанной заранее сохраненной картиной сигнала обнаружения).
При получении, таким образом, направления смещения и величины смещения в направлении под прямыми углами к оптической оси объектива 31, в звуковые катушки, объединенные с объективом 31, запускается ток, для выравнивания точки 30 обнаружения жизнедеятельности путем перемещения объектив 31 в двуосных направлениях под прямыми углами к его оптической оси. Такая электрическая обратная связь осуществляется непрерывно в течение периода обнаружения, и объектив удерживается в заранее определенной позиции (где можно измерять точку 30 обнаружения жизнедеятельности).
Далее будет описан способ мониторинга для обнаружения точки обнаружения жизнедеятельности в направлении вдоль оптической оси объектива 31 (операции (1) и (2) в разделе 6.1.3). Основной принцип состоит в следующем: изображения в сечении во множестве участков, имеющих разные глубины в живом объекте, выделяются с использованием признака конфокальной системы (формирования изображения); вычисляется уровень эквивалентности картины, в отношении заранее сохраненной информации изображения в сечении, и обнаруживается текущая позиция в направлении вдоль оптической оси объектива 31. Ниже приведено подробное объяснение.
Сначала рассмотрим случай, когда свет, излучаемый из позиции α в точке 30 обнаружения жизнедеятельности, концентрируется на булавочном отверстии 35-1, как показано на фиг. 15. Свет, излучаемый из позиции δ, располагающейся глубже, чем позиция α, концентрируется на булавочном отверстии 35-3, расположенном перед булавочным отверстием 35-1, и регистрируется фотодетектором 36-3. Аналогично, свет, излучаемый из позиции ε, располагающейся на меньшей глубине, чем позиция α, концентрируется на булавочном отверстии 35-2, расположенном позади булавочного отверстия 35-1, и регистрируется фотодетектором 36-2. Дифракционная решетка 37 располагается в системе обнаружения, показанной на фиг. 15, для отклонения оптической оси таким образом, чтобы позиция размещения могла изменяться от булавочного отверстия 35-1 к булавочному отверстию 35-3 в направлении под прямыми углами к оптической оси. В такой оптической конфигурации, когда отражающее зеркало (гальванометрическое зеркало) осуществляет сканирование в двуосных направлениях, фотодетектор 36-3 обеспечивает картину сигнала обнаружения на плоскости под прямыми углами к оптической оси объектива 31 и включающей в себя позицию δ. Аналогично, фотодетектора 36-2 обеспечивает картину сигнала обнаружения на плоскости под прямыми углами к оптической оси объектива 31 и включающей в себя позицию ε.
При этом, картины сигнала обнаружения, полученные из точки 30 обнаружения жизнедеятельности и участков на стороне меньшей глубины и стороне большей глубины точки 30 обнаружения жизнедеятельности, заранее сохраняются. При этом сохраняются не только картины сигнала обнаружения в плоскости, включающей в себя позицию δ и позицию ε, полученные, когда объектив располагается в идеальной позиции (где можно измерять точку 30 обнаружения жизнедеятельности), но и картины сигнала обнаружения, полученные из позиций, значительно смещенных к стороне меньшей глубины или стороне большей глубины точки 30 обнаружения жизнедеятельности.
Затем эти заранее сохраненные картины сигнала обнаружения сравниваются с картинами сигнала обнаружения, полученными от фотодетекторов 36-1 - 36-3 (согласование картин с учетом величины смещения в двухмерном направлении под прямыми углами к оптической оси объектива 31), можно определить, располагается ли объектив 31 в данный момент на стороне меньшей глубины или на стороне большей глубины указанной позиции в направлении оптической оси.
В этом процессе согласования картин, вычисляются уровни эквивалентности соответствующих картин сигнала обнаружения, полученных в данный момент от фотодетекторов 36-3, 36-1 и 36-2 по отношению к картинам сигнала обнаружения в соответствующих заранее сохраненных позициях, и производится оценивание, что объектив 31 располагается в месте наивысшего уровня эквивалентности.
Например, рассмотрим случай, когда в результате вычисления уровней эквивалентности с заранее сохраненными картинами сигнала обнаружения, картина сигнала обнаружения, соответствующая двухмерной поверхности, полученной в данный момент от фотодетектора 36-2 синхронно со сканированием в двуосном направлении отражающего зеркала (гальванометрического зеркала) 34, имеет наивысший уровень эквивалентности по отношению к заранее сохраненной картине сигнала обнаружения, полученной из точки 30 обнаружения жизнедеятельности.
В этом случае, из фиг. 15 следует, что текущее положение объектива 31 слишком близко к точке 30 обнаружения жизнедеятельности. При таком результате обнаружения, в звуковые катушки, объединенные с объективом, запускается ток 31, для перемещения объектива назад вдоль оптической оси. Когда объектив 31 устанавливается в позиции, наиболее подходящей для измерения точки 30 обнаружения жизнедеятельности, картина сигнала обнаружения, полученная от фотодетектора 36-1 синхронно со сканированием в двуосном направлении отражающего зеркала (гальванометрического зеркала) 34, согласуется с заранее сохраненной картиной сигнала обнаружения, полученной из точки 30 обнаружения жизнедеятельности.
Даже в случае, когда объектив 31 значительно смещен от положения измерения точки 30 обнаружения жизнедеятельности, если картины сигнала объектива 31 в случае большого смещения сохраняются, как описано выше, то направление смещения и величину смещения объектива 31 можно оценивать путем осуществления согласования картин с текущей картиной сигнала (вычисления уровня эквивалентности между картинами).
6.2.2) Способ оценивания и задания позиции точки обнаружения путем обнаружения конкретной позиции на поверхности живого объекта
В способе, описанном в разделе 6.2.1, картина в сечении, включающая в себя точку 30 обнаружения жизнедеятельности, непосредственно обнаруживается для нахождения позиции точки обнаружения. Другой вариант осуществления предусматривает способ, в котором, когда глубина от поверхности живого объекта до точки обнаружения найдена заранее, обнаруживается позиция поверхности живого объекта в трех измерениях и автоматически оценивается позиция точки обнаружения.
Далее, со ссылкой на фиг. 16, будет объяснен способ обнаружения относительной позиции помеченной позиции 40 на поверхности живого объекта от секции обнаружения жизнедеятельности, которая вновь предложена в качестве другого примерного варианта осуществления (второго принципа), связанного с секцией 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности. Предполагается, что поверхность живого объекта освещается осветительной лампой, обычно используемой в быту, и для обнаружения используется свет, диффузно отраженный на поверхности 41 живого объекта. Однако другой настоящий примерный вариант осуществления не ограничивается этим и может включать в себя конкретный источник света для освещения поверхности 41 живого объекта.
Второй принцип обнаружения позиции точки обнаружения, показанный в этом примерном варианте осуществления, использует принцип «тригонометрии». Таким образом, в другом примерном варианте осуществления, показанном на фиг. 16, секция обнаружения жизнедеятельности снабжена множеством объективов 42 камеры, и множеством двухмерных фотодетекторов 43 (ПЗС-датчиков) расположенных позади множества объективов 42 камеры, которые могут обнаруживать двухмерное изображение. Свет, излучаемый из помеченной позиции 40 на поверхности живого объекта (диффузно отраженный от помеченной позиции 40 поверхности живого объекта) концентрируется в одной точке на двухмерном фотодетекторе 43-1 под действием объектива 42-1 камеры. Аналогично, свет концентрируется в одной точке на двухмерном фотодетекторе 43-2 под действием объектива камеры 42-2. Соответственно, на основании проецируемых положений помеченной позиции 40 на поверхности живого объекта, которые располагаются на двухмерных фотодетекторах 43-1 и 43-2, где формируются изображения, расстояние 44 от точек поверхности участка, где располагается секция обнаружения жизнедеятельности, до поверхности 41 живого объекта и позиции помеченной позиции 40 на поверхности живого объекта в поперечном направлении и направлении глубины вычисляются с использованием тригонометрии.
Кроме того, примерный вариант осуществления, показанный на фиг. 16, отличается тем, что секция 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности и секция 101 обнаружения жизнедеятельности обеспечены в объединенном виде. В результате такого объединенного обеспечения, если глубина точки 30 обнаружения жизнедеятельности от поверхности живого объекта найдена заранее, можно оценивать расстояние от точек 45 поверхности участка, где располагается секция обнаружения жизнедеятельности, до точки 30 обнаружения жизнедеятельности.
6.3) Способ фотоэлектрического преобразования для обнаружения жизнедеятельности
Ниже описан основной принцип способа (второго способа обнаружения) в (3) для выделения сигнала обнаружения жизнедеятельности из указанной позиции в живом объекте с использованием второго способа обнаружения, описанного в разделе 6.1.3.
6.3.1) Использование конфокальной системы
В качестве первого примерного варианта осуществления, описан способ, предусматривающий использование конфокальной системы, а также техническое устройство, описанное в разделе 6.2.1. Основной принцип этого примерного варианта осуществления отличается тем, что применяется оптический принцип, состоящий в том, что 'свет, излучаемый из одной точки в живом объекте во всех направлениях, снова концентрируется в одной точке в конфокальной позиции или в позиции формирования изображения' и 'только свет, сконцентрированный в одной точке в конфокальной позиции или в позиции формирования изображения, выделяется для обнаружения света, излучаемого из соответствующей точки в живом объекте'.
Один примерный вариант осуществления оптической системы для обнаружения жизнедеятельности в секции обнаружения сигнала, сконфигурированной для обнаружения сигнала обнаружения жизнедеятельности из конкретной позиции в живом объекте на основании этого основного принципа, показан на фиг. 17. Кроме того, теория оптической системы для обнаружения жизнедеятельности, показанной на фиг. 17, представлена на фиг. 18 и 19.
Примерный вариант осуществления на фиг. 17 демонстрирует оптическую систему, которая может одновременно измерять жизнедеятельности на трех плоских участках (δ, α, ε), имеющих разные глубины в живом объекте. Таким образом, в оптической системе, образованной объективом 31 и линзой 32 обнаружения, двухмерный жидкокристаллический затвор 51-1 располагается в позиции поверхности формирования изображения, соответствующей плоскому участку, включающему в себя точку 30α обнаружения жизнедеятельности в живом объекте. В двухмерном жидкокристаллическом затворе 51-1, светопропускающая секция 56 в виде булавочного отверстия может быть частично установлена, как показано на фиг. 19(а).
Соответственно, из световых пучков, проходящих через двухмерный, жидкокристаллический затвор 51-1, только световой пучок, проходящий через эту светопропускающую секцию 56, является пропускаемым. В результате, только свет, излучаемый (диффузно отражаемый) из одной точки в точке 30α обнаружения жизнедеятельности, находящийся в конфокальном соотношении (соотношение формирования изображения) с этой светопропускающей секцией 56, может достигать фотодетекторной ячейки 54-1 поперечного одномерного выравнивания и фотодетекторной ячейки 55-2 продольного одномерного выравнивания.
Соответственно, сигнал обнаружения жизнедеятельности, зарегистрированный из точки 30α обнаружения жизнедеятельности образованный двухмерной плоскостью, включающей в себя точку α, непосредственно обнаруживается фотодетекторной ячейкой 54-1 поперечного одномерного выравнивания и фотодетекторной ячейкой 55-2 продольного одномерного выравнивания (что будет подробно описано ниже). С другой стороны, двухмерный жидкокристаллический затвор 51-3 располагается на поверхности формирования изображения, соответствующей точке 30δ обнаружения жизнедеятельности, которая располагается глубже точки 30α обнаружения жизнедеятельности и образована плоским участком, включающим в себя точку δ. Таким образом, сигнал обнаружения жизнедеятельности в двух измерениях, зарегистрированный из точки 30δ обнаружения, обнаруживается фотодетекторной ячейкой 54-3 поперечного одномерного выравнивания и фотодетекторной ячейкой 55-3 продольного одномерного выравнивания.
Кроме того, двухмерный жидкокристаллический затвор 51-2 располагается на поверхности формирования изображения, соответствующей точке 30ε обнаружения жизнедеятельности, которая располагается на меньшей глубине, чем точка 30α обнаружения жизнедеятельности, и образована плоским участком, включающим в себя точку ε. Таким образом, сигнал обнаружения жизнедеятельности в двух измерениях, зарегистрированный из точки 30ε обнаружения, обнаруживается фотодетекторной ячейкой 54-2 фпоперечного одномерного выравнивания и фотодетекторной ячейкой 55-2 продольного одномерного выравнивания.
На фиг. 17, двухмерный жидкокристаллический затвор 51 способный автоматически открывать и закрывать конкретную область используется для выделения света (или электромагнитной волны), полученного из точки 30 обнаружения жизнедеятельности. Однако настоящий примерный вариант осуществления не ограничивается этим, и двухмерный элемент модуляции, использующий ЕО (электрическую оптика) или АО (акустическую оптику) можно использовать в качестве оптического компонента, способного автоматически открывать и закрывать конкретную область. Кроме того, можно использовать механическое булавочное отверстие фиксированного типа или щель, не способную автоматически открывать и закрывать конкретную область, или очень малый отражающий или дифракционный элемент.
Между тем, в качестве способов обнаружения и управления позиции положения для получения сигнала обнаружения жизнедеятельности в живом объекте (операции (1) и (2), описанные в разделе 6.1.3), причем эти способы используются совместно с секцией обнаружения жизнедеятельности (определение термина см. раздел 6.1.3), включающей в себя оптическую систему для обнаружения жизнедеятельности, показанную на фиг. 17, применяется способ "обнаружения изображения в сечении в живом объекте", показанный на фиг. 14 и фиг. 15 и описанный в разделе 6.2.1.
При обнаружении двухмерной картины изменения количества диффузно отраженного света из конкретного сечения в этом живом объекте, можно найти не только позиции тела 1 нервной клетки и аксона 2 в нейроне и позицию нервно-мышечного синапса 5 в конкретном сечении, но и размещение мышечной клетки 6 и глиальной клетки (астроцита).
В связи с этим, свет (или электромагнитная волна), излучаемый (диффузно отражаемый) из положения, где требуется обнаружить жизнедеятельность в конкретном сечении в качестве субъекта измерения (например, конкретная позиция в теле клетки или аксоне нейрона), концентрируется объективом 31 и линзой 32 обнаружения, и свет выделяется в позиции концентрации (позиции формирования изображения или конфокальной позиции для точки 30 обнаружения жизнедеятельности).
Принцип обнаружения сигнала обнаружения жизнедеятельности из конкретной позиции в живом объекте с использованием оптической системы для обнаружения жизнедеятельности, представленный на фиг. 17, будет подробно описан здесь со ссылкой на фиг. 18. На фиг. 18, свет, излучаемый (диффузно отражаемый) из точки 30α обнаружения жизнедеятельности концентрируется (изображается) в пятне μ на двухмерном жидкокристаллическом затворе 51. Таким образом, жидкокристаллический затвор локально открывается только в этом пятне для формирования светопропускающей секции 56μ в двухмерном жидкокристаллическом затворе. Аналогично, пятно ζ, где концентрируется (изображается) свет, излучаемый (диффузно отражаемый) из точки 30β обнаружения жизнедеятельности, рассматривается как светопропускающая секция 56ζ в двухмерном жидкокристаллическом затворе.
Между тем, свет, излучаемый (диффузно отражаемый) из позиции η, отличной от вышеупомянутых пятен (см. оптические пути 33 света обнаружения, изображенные "волнистой линией" на фиг. 18), широко распределяется по двухмерному жидкокристаллическому затвору 51, и, таким образом, значительная часть света блокируется двухмерным жидкокристаллическим затвором 51. Таким образом, лишь очень небольшое количество света проходит через светопропускающую секцию 56μ в двухмерном жидкокристаллическом затворе, но количество света, проходящего через нее, очень мало. В результате, свет маскируется среди шумовых компонент на фотодетекторной ячейке 55 продольного одномерного выравнивания.
Как описано выше, путем "избирательного выделения света или электромагнитной волны, проходящего/ей через конкретную область" на поверхности формирования изображения или в конфокальной позиции, соответствующей конкретному сечению в живом объекте, можно избирательно выделять сигнал обнаружения жизнедеятельности из конкретной позиции в живом объекте. В связи с этим, путем изменения размещения оптического элемента для избирательного выделения света или электромагнитной волны через конкретную область, можно одновременно обнаруживать жизнедеятельности во множестве областей в разных позициях в направлении глубины в живом объекте.
В этом случае, свет или электромагнитная волна, полученный/ая от живого объекта, делится на множество световых пучков или электромагнитных волн по количеству света, и оптические элементы для избирательного выделения света или электромагнитной волны, проходящего/ей через конкретную область, располагаются на соответствующих поверхностях формирования изображения (в конфокальных позициях) множества разделенных, таким образом, световых пучков (электромагнитных волн).
На фиг. 17, двухмерный жидкокристаллический затвор 51-1 располагается на поверхности формирования изображения, соответствующей точке 30α обнаружения жизнедеятельности, и двухмерные жидкокристаллические затворы 51-3 и 51-2 располагаются на соответствующих поверхностях формирования изображения, соответствующих точкам 30δ и 30ε обнаружения жизнедеятельности.
Между тем, на фиг. 17, свет или электромагнитная волна, полученный/ая от живого объекта, делится дифракционной решеткой 37 на световые пучки (электромагнитные волны), распространяющиеся в трех направлениях, но это не является конкретным ограничением. Свет или электромагнитная волна, полученный/ая от живого объекта, может делиться на световые пучки (электромагнитные волны), распространяющиеся в пяти направлениях, или световые пучки (электромагнитные волны), распространяющиеся в семи направлениях, путем изменения конструкции дифракционной решетки 37. Кроме того, в качестве средства разделения количества света для разделения света или электромагнитной волны, полученного/ой от живого объекта, можно использовать полупрозрачное зеркало, полуотражающую призму или поляризующее зеркало или поляризующую призму.
Ниже описан способ непосредственного получения сигнала обнаружения жизнедеятельности. Как показано на фиг. 18, после того, как только свет или электромагнитная волна, полученный/ая из конкретной точки 30 обнаружения жизнедеятельности в живом объекте выделяется с использованием двухмерного жидкокристаллического затвора 51, фотодетектор располагается на плоскости концентрирования (поверхности повторного формирования изображения), образованной конденсорной линзой 52, и сигнал обнаружения жизнедеятельности получается с использованием фотоэлектрического преобразования. Альтернативно, здесь может располагаться двухмерный элемент регистрации света (светочувствительная матрица), например, ПЗС-датчик.
Однако, в случае попытки обнаружения динамической жизнедеятельности, быстро изменяющейся в живом объекте (например, "одновременного отслеживания соответствующих изменений потенциала действия во множестве нейронов с течением времени") в порядке обнаружения изменения потенциала мембраны в нервной системе, например, ПЗС-датчик не может достичь достаточной скорости реакции.
Напротив, в примерных вариантах осуществления, показанных на фиг. 17-19, фотодетекторные ячейки 54 и 55 одномерного выравнивания, способные отслеживать высокоскоростные изменения с течением времени, объединяются в виде матрицы, что позволяет одновременно и в реальном времени обнаруживать высокоскоростные изменения на двухмерной поверхности. В частности, свет или электромагнитная волна, проходящий/ая через конденсорную линзу 52, делится на части по количеству света, и соответствующие пучки (электромагнитные волны) направляются к фотодетекторной ячейке 54 поперечного одномерного выравнивания и к фотодетекторной ячейке 55 продольного одномерного выравнивания. На фиг. 17, для разделения, по количеству света, света, проходящего через конденсорную линзу 52, используется дифракционная решетка 53 для распределения света, в которой коэффициент пропускания света 0-го порядка равен приблизительно 0%, и отношение коэффициента пропускания света +1-го порядка к коэффициент пропускания света -1-го порядка равно приблизительно 1:1. Однако настоящий примерный вариант осуществления не ограничивается этим, и в качестве средства разделения количества света можно использовать полупрозрачное зеркало, полуотражающую призму или поляризующее зеркало или поляризующую призму.
Ниже, со ссылкой на фиг. 19, приведено объяснение способа получения сигнала обнаружения жизнедеятельности путем объединения фотодетекторной ячейки 54 поперечного одномерного выравнивания и фотодетекторной ячейки 55 продольного одномерного выравнивания, направления выравнивания ориентированы под углом друг к другу.
Фотодетекторные ячейки a-j размещены в одномерном направлении (поперечном направлении), и соответствующий сигнал фотодетекторных ячеек a-j можно обнаруживать независимо и одновременно. Хотя здесь это не показано, соответствующие предусилители и схемы обработки сигнала независимо подключены к фотодетекторным ячейкам a-j, что позволяет параллельно отслеживать соответствующие высокоскоростные изменения количества: света обнаружения фотодетекторных ячеек a-j с течением времени. Поскольку можно параллельно обнаруживать изменения количеств света обнаружения соответствующих фотодетекторных ячеек a-j, можно обнаруживать очень быстрое и незначительное изменение, возникающее только в одном месте, ничего не пропуская.
Кроме того, в фотодетекторных ячейках поперечного одномерного выравнивания, показанных на фиг. 19 (b), можно обнаруживать параллельные изменения количеств света обнаружения в 'одномерном направлении с течением времени. Кроме того, изменение количества света обнаружения в одной точке двухмерной плоскости можно выделять в сочетании с фрагментами информации об изменениях количеств света обнаружения, полученными от фотодетекторных ячеек k-t продольного одномерного выравнивания, которые выровнены в направлении выравнивания, ориентированном под наклоном к направлению выравнивания фотодетекторных ячеек поперечного одномерного выравнивания (в непараллельном соотношении).
Таким образом, «множество групп фотодетекторных ячеек, способных независимо и одновременно обнаруживать сигналы (фотодетекторных ячеек 54 поперечного одномерного выравнивания и фотодетекторных ячеек 55 продольного одномерного выравнивания), располагаются так, что соответствующие направления выравнивания фотодетекторных ячеек ориентированы под углом друг к другу (не параллельно), и множество сигналов обнаружения, полученных от соответствующих групп фотодетекторных ячеек (сигналы обнаружения, полученные от фотодетекторных ячеек a-j и фотодетекторных ячеек k-t в соответствующих группах) объединяется в виде матрицы». Соответственно, высокоскоростное изменение сигнала обнаружения, полученного только из конкретного пятна в точке 30 обнаружения жизнедеятельности, сконфигурированной в двух измерениях, можно обнаруживать независимо и непрерывно с течением времени. Это признак настоящего примерного варианта осуществления, показанный на фиг. 19.
Между тем, направления выравнивания фотодетекторных ячеек в соответствующих группах фотодетекторных ячеек ориентированы под прямыми углами друг к другу в (b) и (с) фиг. 19, но настоящий примерный вариант осуществления не ограничивается этим, и угол наклона между направлениями выравнивания фотодетекторных ячеек может значительно отличаться от 90 градусов, при условии, что направления размещения фотодетекторных ячеек не параллельны.
Это, в частности, описано ниже со ссылкой на фиг. 19. Прежде всего, предполагается, что пять тел нервных клеток найдено в точке 30 обнаружения жизнедеятельности в результате анализа внутренней структуры, описанного в (1) раздела 6.1.3, осуществляемого с использованием оптической системы (см. раздел 6.2.1, представленный на фиг. 14 и 15. Затем осуществляется управление позицией, описанный в (2) раздела 6.1.3, и даже если живой объект (например, испытуемый) измерения до некоторой степени перемещается, объектив 31 также перемещается совместно с движением живого объекта, благодаря чему, положение, в котором осуществляется обнаружение жизнедеятельности, является сравнительно фиксированным.
Затем, в операции выделения сигнала жизнедеятельности, представленной в (3) раздела 6.1.3, затворы локально открываются в позициях формирования изображения на двухмерном жидкокристаллическом затворе 51, соответствующих положениям пяти тел нервных клеток в точке 30 обнаружения жизнедеятельности, для формирования светопропускающих секций 56ζ, θ, λ, μ и ξ в двухмерном жидкокристаллическом затворе.
Затем, под действием конденсорной линзы 52, соответствующие световые пучки, проходящие через светопропускающие секции 56ζ, θ, λ, μ и ξ в двухмерном жидкокристаллическом затворе концентрируются в точке ζ' в фотодетекторной ячейке b, в точке θ' в фотодетекторной ячейке d, в точке λ' в фотодетекторной ячейке f, в точке μ' в фотодетекторной ячейке h и в точке ξ' в фотодетекторной ячейке j на фотодетекторной ячейке 54 поперечного одномерного выравнивания. Аналогично, соответствующие световые пучки, проходящие через светопропускающие секции 56λ, ξ, θ, μ и ζ в двухмерном жидкокристаллическом затворе концентрируются в точке λ' в фотодетекторной ячейке 1, в точке ξ' в фотодетекторной ячейке n, в точке θ' в фотодетекторной ячейке р, в точке μ' в фотодетекторной ячейке r и в точке ζ' в фотодетекторной ячейке t на фотодетекторной ячейке 55 продольного одномерного выравнивания.
Например, когда нейрон, находящийся в соотношении формирования изображения со светопропускающей секцией 56μ в двухмерном жидкокристаллическом затворе, возбуждает потенциал действия, интенсивность схождения света в позиции μ' мгновенно изменяется в соответствии с потенциалом действия. В результате, сигналы обнаружения поступают от фотодетекторных ячеек h и r. Таким образом, зная, от каких фотодетекторных ячеек в фотодетекторной ячейке 54 поперечного одномерного выравнивания и в фотодетекторной ячейке 55 продольного одномерного выравнивания, могут поступать сигналы обнаружения, можно определить, какой нейрон в точке 30 обнаружения жизнедеятельности возбуждает потенциал действия.
Затем, как будет описано ниже, в схеме обнаружения жизнедеятельности осуществляется отсчет импульсов и вычисляется количество потенциалов действия в конкретное время в расчете на нейрон для обнаружения состояния активации.
В вышеприведенном объяснении речь идет о потенциале действия нейрона (соответствующем "изменению потенциала мембраны в нервной системе") в качестве примера обнаружения жизнедеятельности. Однако настоящий примерный вариант осуществления не ограничивается этим, и если путь аксона 2, нервно-мышечного синапса 5 или мышечной клетки 6 устанавливается в соответствии с позицией формирования изображения на светопропускающей секции 56 в двухмерном жидкокристаллическом затворе, можно измерять состояние передачи сигнала в аксоне 2 или состояние передачи сигнала в мышцу.
В примерном варианте осуществления, описанном выше, соответствующие размеры (размеры апертуры) светопропускающих секций 56ζ, θ, λ, μ и ξ, в двухмерном жидкокристаллическом затворе устанавливаются сравнительно малыми, и обнаруживается жизнедеятельность в расчете на малую область в точке 30 обнаружения жизнедеятельности, например, одно тело 1 клетки в нейроне или одну мышечную клетку 8, аксон 2 или нервно-мышечный синапс 5. Другие применяемые варианты осуществления этого примерного варианта осуществления таковы: (1) на фиг. 17, все двухмерные жидкокристаллические затворы 51-1, 51-2, 51-3 могут располагаться только в конфокальных позициях или позициях формирования изображения, соответствующих положениям на одной и той же глубине (например, в точке 30а обнаружения жизнедеятельности), для обнаружения жизнедеятельностей в двухмерном направлении, соответствующих фиксированным положениям на конкретной глубине; и (2) на фиг. 19, соответствующие размеры (размеры апертуры) светопропускающих секций 56ζ, θ, λ, μ и ξ в двухмерном жидкокристаллическом затворе можно увеличить, для обнаружения жизнедеятельностей в сравнительно большом диапазоне в точке 30α обнаружения жизнедеятельности. В этом случае, каждое из пятен концентрации ζ', θ', λ', μ' и ξ' на фиг. 19 (b) и (с) включает в себя сигналы активности, связанные с множеством нейронов в точке 30α обнаружения жизнедеятельности. Таким образом, даже при обнаружении импульсного сигнала, соответствующего одному потенциалу действия в одном из пятен концентрации, невозможно указать единичный нейрон, возбуждающий потенциал действия. Однако, путем обнаружения частоты возникновения импульсного сигнала, соответствующего потенциалу действия в пятне концентрации, можно обнаруживать состояние активации в конкретной области, образованной множеством нейронов в точке 30α обнаружения жизнедеятельности.
Этот применяемый вариант осуществления позволяет захватывать жизнедеятельности немного в широкой перспективе (по сравнению с активностью в расчете на нейрон). Примером конкретной цели этого способа обнаружения является обнаружение активности для каждого столбца в коре головного мозга.
Увеличение соответствующих размеров (размеров апертуры) светопропускающих секций 56ζ, θ, λ, μ и ξ в двухмерном жидкокристаллическом затворе способствует утечке сигналов потенциала действия от нейронов в позициях, имеющих разные глубины. Здесь, толщина коры головного мозга человека чуть меньше 2 мм, что снижает вероятность получения сигнала потенциала действия из позиции на стороне меньшей глубины или на стороне большей глубины, чем кора головного мозга в направлении глубины. Соответственно, если в этом применяемом варианте осуществления обнаруживаются массовая активность нейронов в пределах 2 мм, то есть толщины коры головного мозга, проблема утечки сигналов потенциала действия из позиций, глубины которых выходят за пределы этого диапазона, будет решена (поскольку никаких сигналов потенциала действия не окажется на стороне меньшей глубины или на стороне большей глубины, чем эта).
Кроме того, кора головного мозга образована столбцами шириной примерно от 0,5 до 1,0 мм, и говорят, что передача сигнала между соседними столбцами сравнительно мала. Соответственно, когда соответствующие размеры (размеры апертуры) светопропускающих секций 56ζ, θ, λ, μ и ξ в двухмерном жидкокристаллическом затворе устанавливаются согласно размеру одного столбца (примерно от 0,5 до 1,0 мм), можно обнаруживать состояние активации для каждого столбца (например, характеристику частоты обнаружения потенциала действия в расчете на столбчатую единицу).
С другой стороны, в коре головного мозга существует много частей, в котором обработка информации осуществляется в расчете на столбчатую единицу. В связи с этим, настоящий примерный вариант осуществления позволяет эффективно решать, как осуществляется обработка информации в расчете на столбчатую единицу, и находить ее детали с первого раза. Помимо вышеописанного способа обнаружения, настоящий примерный вариант осуществления предусматривает техническое устройство, в котором: (3) один двухмерный жидкокристаллический затвор 51 блокирует свет в позиции формирования изображения столбца, соседствующего с целевым столбцом, расположенным на светопропускающей секции 56 в двухмерном жидкокристаллическом затворе, во избежание обнаружения сигнала потенциала действия от соседнего столбца, и "другая светопропускающая секция 56 в другом двухмерном жидкокристаллическом затворе 51" располагается в позиции формирования изображения соседнего столбца, благодаря чему, сигнал потенциала действия от соседнего столбца обнаруживается другими фотодетекторными ячейками 54 и 55; и (4) с использованием сигналов потенциала действия, полученных из столбцов, соседствующих друг с другом, разными фотодетекторными ячейками 54 и 55 в (3), перекрестная помеха (утечка сигнала обнаружения) от соседнего столбца устраняется в процессе вычисления сигнала. Это дает эффект повышения точности обнаружения сигнала в расчете на столбчатую единицу за счет устранения перекрестной помехи от соседнего столбца.
В вышеприведенном объяснении речь идет о способе обнаружения, в котором диапазон обнаружения субъекта измерения составляет примерно от 10 до 1000 мкм, то есть сравнительно узок, в соответствующей позиции формирования изображения светопропускающей секции 56 в двухмерном жидкокристаллическом затворе. Напротив, в случае, когда изменение концентрации кислорода в крови в окружающих участках обнаруживается с использованием оптической системы для обнаружения жизнедеятельности, показанной на фиг. 17, необходимо устанавливать более широкий диапазон обнаружения. Кроме того, необходимо дополнительно увеличивать соответствующие размеры (размеры апертуры) светопропускающих секций 56ζ, θ, λ, μ и ξ в двухмерном жидкокристаллическом затворе в соответствии с таким широким диапазоном обнаружения. В этом случае, хотя это не показано на фиг. 17, предусмотрено множество оптических систем для обнаружения жизнедеятельности, показанных на фиг. 17, и цветовые фильтры для избирательного пропускания света, имеющего длины волны 780 нм, 805 нм и 830 нм, соответственно, также располагаются в середине оптических путей 33 света обнаружения. Затем, световые пучки, имеющие соответствующие длины волны 780 нм, 805 нм и 830 нм, обнаруживаются по отдельности, и вычисляется отношение между ними в отношении количества света обнаружения. Способ обнаружения жизнедеятельности в этом случае осуществляется (1) согласно зависящему от времени изменению отношения в отношении количества света обнаружения между пучками света обнаружения, имеющими соответствующие длины волны 780 нм, 805 нм и 830 нм, или (2) путем сравнения значений, полученных в ходе обнаружения, с предварительно измеренными значениями (опорные значения) отношения количеств света обнаружения между пучками света обнаружения, имеющими соответствующие длины волны 780 нм, 805 нм и 830 нм.
6.3.2) Выделение пространственных изменений и изменений, зависящих от времени, с помощью оптической системы формирования изображения
В качестве другого применяемого варианта осуществления в отношении способа, описанного в разделе 6.3.1, ниже представлена оптическая система для обнаружения жизнедеятельности, которая не требует такого высокого пространственного разрешения, и которая пригодна для случая легкого (в общем случае) обнаружения жизнедеятельности с низкими затратами с использованием упрощенной оптической системы для обнаружения жизнедеятельности.
В применяемом варианте осуществления описанной ниже оптической системы для обнаружения жизнедеятельности, фотодетектор 36 располагается в позиции формирования изображения, соответствующей точке 30 обнаружения жизнедеятельности в живом объекте (в положении, где располагается фотодетекторная ячейка, соответствующая ее секции обнаружения), как показано на фиг. 20. Линза 57 формирования изображения автоматически перемещается в направлении оптической оси в соответствии с движением живого объекта (испытуемого) таким образом, что фотодетектор 36 всегда оказывается в позиции формирования изображения, соответствующей точке 30 обнаружения жизнедеятельности, даже если живой объект (испытуемый) перемещается.
В частности, когда живой объект (испытуемый) перемещается, и фотодетектор 36 выходит из позиции формирования изображения, направление и величина перемещения живого объекта (испытуемого) оцениваются (операция выравнивания, соответствующая (1) и, частично, (2)) с использованием способа, описанного в разделе 6.2.2 и на фиг. 16. Если в результате этого найдена необходимая величина коррекции, линза 57 формирования изображения автоматически перемещается в направлении оптической оси для коррекции, в качестве управления позиции, соответствующего оставшейся операции (2) в разделе 6.1.3.
В примерном варианте осуществления, показанном на фиг. 20, линза 57 формирования изображения действует совместно с электродвигателем прямой подачи (не показан на фигуре), и линза 57 формирования изображения перемещается в направлении оптический оси в соответствии с операцией привода электродвигателя прямой подачи.
Здесь, при обнаружении позиции субъекта измерения, описанном на фиг. 16, используется обычный видимый свет. С другой стороны, оптическая система для обнаружения жизнедеятельности использует свет в ближнем инфракрасном диапазоне (или инфракрасный свет). В связи с этим, цветовой фильтр 60 располагается в середине оптических путей 33 света обнаружения, благодаря чему, видимый свет, используемый для обнаружения позиции субъекта измерения, не примешивается в оптическую систему для обнаружения жизнедеятельности в качестве шумовых компонентов.
Здесь, рассмотрим случай, когда нейрон возбуждает потенциал действия в точке 30α обнаружения жизнедеятельности. Когда нейрон возбуждает потенциал действия для изменения потенциала 20 мембраны, поглощение света на длинах волны света в ближнем инфракрасном диапазоне (или инфракрасного света), описанное в разделе 4.7, происходит за короткое время. В результате, интенсивность диффузного отражения (или интенсивность пропущенного света) света, имеющего соответствующую длину волны в позиции α, уменьшается. Как показано на фиг. 20 (а), когда фотодетектор 36 располагается в позиции формирования изображения, соответствующей точке 30 обнаружения жизнедеятельности, сигнал 58 обнаружения жизнедеятельности, соответствующий точке 30 обнаружения, возникает только в фотодетекторной ячейке W, расположенной в конфокальной позиции (позиции формирования изображения), соответствующей позиции α в фотодетекторе 36.
Если нейрон возбуждает потенциал действия в позиции δ на удалении от точки 30 обнаружения жизнедеятельности (например, в более глубоком положении, чем точка 30 обнаружения жизнедеятельности, если смотреть от поверхности 41 живого объекта), то оптические пути 33 света обнаружения, диффузно отраженного в позиции δ (или проходящего через позицию δ) один раз сходятся в позиции перед фотодетектором 36, и затем свет обнаружения большого размера, имеющий размер пятна в сечении, проецируется на широкий участок фотодетектора 36. В результате, не только сигналы 58 обнаружения жизнедеятельности обнаруживаются в большом диапазоне фотодетекторных ячеек от U до Х в фотодетекторе 36, но и амплитуда сигнала обнаружения для сигнала 58 обнаружения жизнедеятельности, регистрируемого из одной фотодетекторной ячейки, значительно снижается в сравнении с фиг. 20(а).
В связи с этим, только когда большой сигнал 58 обнаружения жизнедеятельности,. имеющий большую амплитуду сигнала обнаружения, получается только из одной фотодетекторной ячейки, принимается решение, что жизнедеятельность в точке 30 обнаружения жизнедеятельности обнаружена, и сигнал 58 обнаружения жизнедеятельности выделяется.
С другой стороны, если потенциалы действия возбуждаются в позициях отсутствия формирования изображения, как на фиг. 20 (b), сигналы 58 обнаружения жизнедеятельности, регистрируемые в соответствующих фотодетекторных ячейках от U до X, в большинстве случаев имеют очень малую амплитуду сигнала обнаружения, поэтому они не могут быть обнаружены и маскируются шумовыми компонентами.
В вышеприведенном объяснении речь идет о случае, когда изменение потенциала мембраны в нервной системе обнаруживается как сигнал 58 обнаружения жизнедеятельности. Настоящий примерный вариант осуществления не ограничивается этим, и в случае обнаружения изменения концентрации кислорода в крови в окружающих участках, в середине оптических путей 33 света обнаружения необходимо размещать множество оптических систем для обнаружения жизнедеятельности, показанных на фиг. 20, и цветовые фильтры 60 для избирательного пропускания света, имеющего длины волны 780 нм, 805 нм и 830 нм, соответственно. Затем, световые пучки, имеющие соответствующие длины волны 780 нм, 805 нм и 830 нм, обнаруживаются по отдельности, и отношение между ними в отношении количества света обнаружения вычисляется для каждой фотодетекторной ячейки.
Когда сигнал 58 обнаружения жизнедеятельности получается из точки 30 обнаружения жизнедеятельности, расположенной в позиции формирования изображения, соответствующей фотодетектору 36, как показано на фиг. 20 (а), отношение количеств света обнаружения из конкретной фотодетекторной ячейки заметно изменяется. Таким образом, только сигнал обнаружения, имеющий значительное отношение количеств света обнаружения, в сравнении с другими фотодетекторными ячейками, выделяется в качестве сигнала 58 обнаружения жизнедеятельности. Напротив, когда соответствующие отношения количеств света обнаружения не столь различаются между соседними фотодетекторными ячейками U, V и W, они могут находиться в состоянии, показанном на фиг. 20 (b). В связи с этим, сигналы этих ячеек не выделяются в качестве сигнала 58 обнаружения жизнедеятельности.
Таким образом, (А) когда количества света обнаружения, полученные от соседних фотодетекторных ячеек, сравниваются друг с другом, и значение (или отношение) конкретной фотодетекторной ячейки значительно изменяется (имеет высокое пространственное разрешение в фотодетекторе 36), в качестве сигнала 58 обнаружения жизнедеятельности выделяется только компонента сигнала конкретной фотодетекторной ячейки. Альтернативно, сигнал 58 обнаружения жизнедеятельности можно выделять (В) согласно изменению, зависящему от времени, в каждой фотодетекторной ячейке, отношения количеств света обнаружения между пучками света обнаружения, имеющими соответствующие длины волны 780 нм, 805 нм и 830 нм, или (С) путем сравнения значений, полученных в ходе обнаружения, с предварительно измеренными значениями (опорными значениями) отношения количеств света обнаружения в пучках света обнаружения, имеющих соответствующие длины волны 780 нм, 805 нм и 830 нм.
Кроме того, помимо этого, оптическую систему для обнаружения жизнедеятельности, показанную на фиг. 20, можно применять к измерению изменения температуры посредством термографии. В этом случае, оптическую систему для обнаружения позиции, показанную на фиг. 16, также можно совместно использовать для выравнивания. Таким образом, как показано на фиг. 20, когда часть внутри живого объекта, располагающаяся глубже, чем поверхность 41 живого объекта активируется, кровоток усиливается, и температура поверхности 41 живого объекта локально возрастает. При этом измеряется распределение температуры на поверхности 41 живого объекта, и опосредованно измеряется состояние активации в точке 30 обнаружения жизнедеятельности. В этом случае, распределение температуры на поверхности 41 живого объекта выделяется в качестве сигнала 58 обнаружения жизнедеятельности.
В случае обнаружения, по меньшей мере, одного из "изменения потенциала мембраны в нервной системе" и "изменения концентрации кислорода в крови в окружающих участках", ПЗС-датчик, в общем случае, можно использовать в качестве фотодетектора 36, показанного на фиг. 20. В случае, когда локальное высокоскоростное изменение в точке 30 обнаружения жизнедеятельности обнаруживается непрерывно (с течением времени), скорости реакции ПЗС-датчика не хватает для обнаружения. В этом примерном варианте осуществления, предусмотрены предусилители для соответствующих фотодетекторных ячеек 38-01 - 38-15, расположенных в двух измерениях, что позволяет параллельно и одновременно регистрировать количества света обнаружения фотодетекторных ячеек 38-01 - 38-15 и непрерывно (с течением времени) обнаруживать локальное высокоскоростное изменение в точке 30 обнаружения жизнедеятельности.
Конфигурация фотодетектора 36 в таком случае показана на фиг. 21. Группа фотодетекторных ячеек, образованная фотодетекторными ячейками 38-01 - 38-05, является фотодетекторной ячейкой одномерного выравнивания, аналогично фиг. 19(b) и (с). Фотодетекторные ячейки 38-01 - 38-05 по отдельности и непосредственно подключены к соответствующим входным частям 85 схемы обнаружения жизнедеятельности.
Фотодетекторная ячейка 38 и ее соответствующая входная часть 85 схемы обнаружения жизнедеятельности сформированы монолитным образом на полупроводниковом кристалле фотодетектора 36 (путем совместного шаблонирования на одном и том же полупроводниковом кристалле). Альтернативно, фотодетекторная ячейка 38 и ее соответствующая входная часть 85 схемы обнаружения жизнедеятельности могут быть сформированы гибридным образом, будучи образованы отдельными полупроводниковыми кристаллами и расположены рядом на поверхности фотодетектора 36.
Входная часть 85 схемы обнаружения жизнедеятельности, соответствующая фотодетекторной ячейке 38, включает в себя предусилитель и входящую в его состав простую схему обработки сигналов (схему отсчета импульсов), и ее выход подключен к линии 62 сигнала обнаружения, выходящей из входной части и внутренней части схемы обнаружения. Поскольку фотодетекторные ячейки 38 подключены к их соответствующим входным частям 85 схемы обнаружения жизнедеятельности в фотодетекторе 36, сигнал обнаружения жизнедеятельности можно стабильно и точно выделять, не подвергаясь никакому влиянию шумового возмущения, даже если сигнал очень слаб.
Рядом с группой фотодетекторных ячеек, образованной ячейками 38-01 - 38-05 фотодетектора, располагается группа фотодетекторных ячеек, образованная фотодетекторными ячейками 38-11 - 38-15 с некоторым промежутком, и каждая из фотодетекторных ячеек 38 подключена к ее соответствующей входной части 85 схемы обнаружения жизнедеятельности. С использованием фотодетекторных ячеек 38-01 - 38-15, расположенных таким образом в двух измерениях, можно независимо, с высокой скоростью и непрерывно обнаруживать каждую жизнедеятельность, происходящую в двух измерениях точки 30 обнаружения жизнедеятельности.
На фотодетекторе 36, показанном на фиг. 21, входные части 85 схемы обнаружения жизнедеятельности, соответствующие фотодетекторным ячейкам 38, располагаются на большом участке. В качестве технического устройства, препятствующего проецированию света обнаружения из точки 30 обнаружения жизнедеятельности на этот участок, как показано на фиг. 22, лентикулярная линза 68 располагается в серединах оптических путей 33 света обнаружения (между линзой 57 формирования изображения и фотодетектором 36). Лентикулярная линза 68 выполнена в виде множества расположенных в ряд цилиндрических линз (в каждой из которых поверхность линзы частично имеет форму столба), и предназначена для локального изменения оптических путей 33 света обнаружения.
Здесь, для упрощения объяснения, фиг. 22 иллюстрирует только оптические пути световых лучей, проходящих через центр линзы 57 формирования изображения, среди оптических путей 33 лучей света обнаружения, излучаемых (диффузно отражаемых или пропускаемых) из соответствующих пятен в точке 30 обнаружения жизнедеятельности. Благодаря оптическому преломлению в лентикулярной линзе 68, показанной на фиг. 22, лучи света обнаружения, излучаемые из соответствующих пятен в точке 30 обнаружения жизнедеятельности, достигают фотодетекторных ячеек 38-2 - 38-4. Однако входные части 85 схемы обнаружения жизнедеятельности, соответствующие фотодетекторным ячейкам 38, не предназначены для освещения этими лучами света обнаружения.
Между тем, примерный вариант осуществления, представленный на фиг. 22 предусматривает использование лентикулярной линзы 68, чтобы свет (или электромагнитная волна) из точки 30 обнаружения жизнедеятельности проецировался не на область, где обеспечены входные части 85 схемы обнаружения жизнедеятельности, соответствующие фотодетекторным ячейкам 38 в фотодетекторе 36, а только на область, где обеспечены фотодетекторные ячейки 38.
Однако настоящий примерный вариант осуществления не ограничивается этим, и на пути оптических путей 33 света обнаружения к фотодетектору 36 могут располагаться другие поляризационные элементы или элементы частичной блокировки света для проецирования света только на конкретную область в фотодетекторе 36. В качестве примера вышеупомянутых других поляризационных элементов, отражательный дифракционный элемент (имеющий наклон в конкретном диапазоне) (например, дифракционная решетка, отличающаяся тем, что можно использовать коэффициенты пропускания света 0-го порядка и света -1-го порядка почти равны 0%, и коэффициент пропускания света +1-го порядка равен почти 100%).
6.3.3) Способ обнаружения высокоскоростного изменения свойства ядерного магнитного резонанса
В качестве другого применяемого варианта осуществления этого примерного варианта осуществления, способ обнаружения высокоскоростного изменения свойства ядерного магнитного резонанса описан ниже со ссылкой на фиг. 23 и фиг. 24.
Когда один нейрон возбуждает потенциал действия, его потенциал мембраны временно изменяется, что вызывает поглощение электромагнитных волн в диапазоне значений химического сдвига, описанном в разделе 5.2 вследствие ядерного магнитного резонанса (возбуждение за счет магнитного резонанса в ядре атома водорода) и излучение электромагнитной волны на основании релаксации возбуждения, происходящей сразу после этого.
С другой стороны, при активации конкретной области (сравнительно широкой области, образованной множеством нейронов) в нервной системе, множество нейронов в конкретной области повторяет возбуждение своих потенциалов действия в течение короткого времени. В связи с этим, состояние активации в конкретном участке нервной системы можно обнаруживать как сигнал обнаружения жизнедеятельности с использованием МРТ или фМРТ не как единичный потенциал действия в одном нейроне, а как сигнал, усредненный по конкретному временному диапазону в конкретном пространственном диапазоне. Соответственно, в альтернативном примерном варианте осуществления варианта осуществления, описанном в разделе 6.3.1 или 6.3.2, локальное изменение свойства ядерного магнитного резонанса в диапазоне значений химического сдвига, описанном в разделе 5.2, обнаруживается с использованием МРТ (магнитно-резонансного формирования изображения) или фМРТ (функционального МРТ), и, таким образом, обнаруживается сигнал обнаружения жизнедеятельности, соответствующий изменению потенциала мембраны нейрона.
Однако, в этом альтернативном примерном варианте осуществления, временное разрешение сигнала обнаружения жизнедеятельности, которое можно обнаружить, имеет только уровень, равный уровню современного МРТ или фМРТ. В связи с этим, ввиду низкого временного разрешения и пространственного разрешения в традиционном методе 2, единичный потенциал действия одного нейрона невозможно обнаружить.
Фиг. 23 демонстрирует другой применяемый вариант осуществления, который позволяет решить эту проблему и обнаружить внутреннее высокоскоростное изменение свойства ядерного магнитного резонанса. На фиг. 23 (а), плоскость, где (обеспечены сверхпроводящий) магнит 73 и катушка 72 для создания магнитного поля, плоскость, где обеспечена катушка 74 возбуждения, и плоскость двухмерно организованной матрицы 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса размещены под прямыми углами друг к другу. Здесь, аналогично традиционной МРТ или фМРТ, (сверхпроводящий) магнит 73 используется для обеспечения плотности магнитного потока постоянного тока извне. Кроме того, катушка 72 для создания магнитного поля предусмотрена для коррекции пространственного распределения плотности магнитного потока для формирования однородной плотности магнитного потока в части 75 организма, где требуется проводить обнаружение (в голове испытуемого) и для точной регулировки значения плотности магнитного потока постоянного тока в соответствии со значениями химического сдвига, описанными в разделе 5.2. Эту катушку 72 для создания магнитного поля в ряде случаев можно использовать в традиционном устройстве МРТ или устройстве фМРТ.
Здесь, в основном, предполагается, что голова человеческого тела является целью для обнаружения жизнедеятельности в качестве целевого организма для измерения в применяемом варианте осуществления, показанном на фиг. 23. Однако применяемый вариант осуществления не ограничивается этим, и обнаружение жизнедеятельности может осуществляться на внутренних органах, например, сердце в теле человека или внутренности конечностей. Кроме того, организм не ограничивается млекопитающими, например, собаками или кошками, и любые организмы, в том числе микроорганизмы, можно задавать на части 75 организма, где требуется проводить обнаружение.
Кроме того, этот применяемый вариант осуществления отличается тем, что «часть 75 организма, где требуется проводить обнаружение (голова испытуемого) можно вводить или выводить через катушку 74 возбуждения». Соответственно, путем увеличения размера катушки 74 возбуждения, обнаружение жизнедеятельности можно осуществлять на внутренности крупного организма наподобие человека. Это также обеспечивает преимущество в том, что можно свободно использовать поверхность для обнаружения высокоскоростного изменения свойства ядерного магнитного резонанса (плоскость, где располагается двухмерно организованная матрица 71 ячеек для обнаружения изменение свойства ядерного магнитного резонанса). Эта ситуация, в частности, описана ниже. Для обнаружения жизнедеятельности, необходимо вводить/выводить часть 75 организма, где требуется проводить обнаружение, в/из область/и, по которой распределены соответствующие плотности магнитного потока постоянного тока, создаваемого (сверхпроводящим) магнитом 73 и катушкой 72 для создания магнитного поля, и требуется выполнение следующих условий: а) должно быть предоставлено место для обеспечения части 75 организма, где требуется проводить обнаружение, на участке, по которому распределены плотности магнитного потока постоянного тока; и b) должно быть предоставлено место, куда можно вводить часть 75 организма, где требуется проводить обнаружение, и откуда ее можно выводить.
Выполнение этих условий необходимо даже в традиционном устройстве МРТ или устройстве фМРТ. Однако в этих традиционных устройствах, место, куда можно вводить часть 75 организма, где требуется проводить обнаружение, и откуда ее можно выводить, часто обеспечивается на стороне катушки обнаружения (не показана на фиг. 23), которая обеспечена для обнаружения изменения свойства ядерного магнитного резонанса.
Между тем, как показано в применяемом варианте осуществления, представленном на фиг. 23, на плоскости на стороне (сверхпроводящего) магнита 73 для генерации плотности магнитного потока постоянного тока, нет места, куда можно вводить часть 75 организма, где требуется проводить обнаружение, и откуда ее можно выводить. Если место, куда можно вводить часть 75 организма, где требуется проводить обнаружение, и откуда ее можно выводить, задано на стороне плоскости для обнаружения изменения свойства ядерного магнитного резонанса (плоскости, где располагается двухмерно организованная матрица 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса), как в традиционном устройстве МРТ или устройстве фМРТ, физическое размещение на этой плоскости сильно ограничено, что значительно снижает степень свободы способа обнаружения изменения свойства ядерного магнитного резонанса. Напротив, размещение, представленное на фиг. 23, значительно повышает степень свободы способа обнаружения изменения свойства ядерного магнитного резонанса.
Однако, поскольку длина (периметра) вокруг катушки 74 возбуждения больше в конфигурации, показанной на фиг. 23, значение сопротивления катушки 74 возбуждения возрастает, что вызывает проблему спада частотной характеристики катушки 74 возбуждения. Этот применяемый вариант осуществления предусматривает техническое устройство, в котором сечение проволочного стержня, составляющего катушку 74 возбуждения, расширяется для снижения значения сопротивления, что позволяет решить вышеописанную проблему.
Применяемый вариант осуществления, представленный на фиг. 23, имеет следующие признаки: множество ячеек 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса, каждая из которых включает в себя катушку 84 обнаружения для обнаружения жизнедеятельности, имеющую более короткий периметр, чем к катушки 74 возбуждения, располагается в двух измерениях в виде матрицы (см. Фиг. 23 (а)); и одна ячейка 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса выполнена так, что включает в себя входную часть 85 схемы обнаружения жизнедеятельности, чтобы иметь функцию усиления (функцию предусилителя) сигнала обнаружения, полученного от катушки 84 обнаружения, и функцию обработки сигнала, эквивалентную уровню входной части (см. Фиг. 23(b)).
Здесь, когда единичный периметр катушки 84 обнаружения устанавливается более коротким, чем катушка 74 возбуждения, значение сопротивления в катушке 84 обнаружения снижается, и частотная характеристика обнаружения сигнала катушкой 84 обнаружения повышается. Это позволяет более точно регистрировать сигнал обнаружения жизнедеятельности, изменяющийся с высокой скоростью.
Между тем, поскольку предусилитель обеспечен вне катушки обнаружения (не показан на фиг. 23) в традиционном устройстве МРТ или устройстве фМРТ, шумовые возмущения примешиваются через кабель между катушкой обнаружения и предусилителем. С другой стороны, в этом применяемом варианте осуществления, одна ячейка 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса выполнена так, что имеет функцию предусилителя, применяемую к сигналу обнаружения, полученному от каждой катушки 84 обнаружения, и функцию обработки сигнала, эквивалентную уровню входной части, благодаря чему примесь шумовых возмущений снижается, и сигнал обнаружения жизнедеятельности можно получать стабильно и точно.
Этот признак, в частности, описан ниже. Как показано на фиг. 23 (а), двухмерно организованные матрицы 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса, которое является одним типом сигнала обнаружения жизнедеятельности, располагаются как на стороне меньшей глубины (не показана), так и на стороне большей глубины части 75 организма, где требуется проводить обнаружение (головы испытуемого), в плоскости страницы. В каждой из двухмерно организованных матриц 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса, ячейки 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса, каждая из которых имеет конфигурацию, показанную на фиг. 23(b), размещены в двух измерениях для формирования матричной конфигурации.
Здесь, как показано на фиг. 23 (b), линия питания и линия заземления 81, подлежащие обеспечению во входной части 85 схемы обнаружения жизнедеятельности, и линия 82 передачи для системного тактового сигнала и сигнала меток времени располагаются должны располагаться под прямыми углами к катушке 84 обнаружения. Причина в следующем: такое размещение препятствует не только утечке сигналов передачи (системного тактового сигнала и сигнала меток времени), переносимых по линии 82 передачи для системного тактового сигнала и сигнала меток времени в катушку 84 обнаружения, но и негативному влиянию линии питания и линии заземления 81 на катушку 84 обнаружения. С другой стороны, в этом применяемом варианте осуществления, временной режим обнаружения изменения свойства ядерного магнитного резонанса (обнаружения жизнедеятельности) переключается на выходной временной режим сигнала обнаружения жизнедеятельности, выводимого из входной части 85 схемы обнаружения жизнедеятельности и наоборот, что повышает точность обнаружения для обнаружения изменения свойства ядерного магнитного резонанса (обнаружения жизнедеятельности). Альтернативно, как показано на фиг. 23 (b), если выходная линия 83 для сигнала обнаружения жизнедеятельности располагается под прямыми углами к катушке 84 обнаружения, можно предотвратить утечку выходного сигнала из выходной линии 83 для сигнала обнаружения жизнедеятельности в катушку 84 обнаружения. Это позволяет одновременно осуществлять обнаружение изменения свойства ядерного магнитного резонанса (обнаружение жизнедеятельности) и вывод сигнала обнаружения жизнедеятельности, что позволяет осуществлять обнаружение изменения свойства ядерного магнитного резонанса (обнаружение жизнедеятельности) в течение долгого периода времени.
Когда один нейрон возбуждает потенциал действия, его потенциал мембраны временно изменяется, что вызывает поглощение и излучение электромагнитной волны, соответствующей значению химического сдвига, описанного в разделе 5.2. Характеристика поглощения/излучения электромагнитной волны изменяется в соответствии с картиной потенциала действия, и ее сигнал изменения возникает в катушке 84 обнаружения.
Хотя это не показано на фиг. 23 (b), концевая часть этой катушки 84 обнаружения непосредственно подключена к предусилителю во входной части 85 схемы обнаружения жизнедеятельности. Соответственно, когда сигнал обнаружения жизнедеятельности, соответствующий картине потенциала действия, возникающей в одном нейроне, образуется в катушке 84 обнаружения, сигнал обнаружения жизнедеятельности усиливается предусилителем. Усиленный таким образом сигнал проходит через полосовой фильтр (или детекторную схему), настроенный на частоты электромагнитных волн, поступающих от катушки 74 возбуждения в входной части 85 схемы обнаружения жизнедеятельности, благодаря чему, выводится только компонента электромагнитной волны, соответствующая значению химического сдвига, и сигнал преобразуется в цифровой сигнал А/Ц преобразователем (аналого-цифровым преобразователем) и временно хранится в секции памяти. Таким образом, благодаря использованию полосового фильтра (или детекторной схемы), отношение С/Ш сигнала обнаружения значительно повышается. Однако этот сигнал обнаружения очень слаб, и поэтому подвергается обработке сигнала (обработке входной части) для дополнительного повышения точности обнаружения во входной части 85 схемы обнаружения жизнедеятельности.
Таким образом, поскольку картина потенциала действия, возникающая в нейроне, определяется заранее, картина потенциала действия, соответствующая ей, сохраняется во входной части 85 схемы обнаружения жизнедеятельности. Затем, вычисление согласования картин между этой картиной обнаружения, соответствующей заранее сохраненному потенциалу действия, и сигналом обнаружения, временно хранящимся в секции памяти (заметим, что при этом осуществляется обработка стандартизации значения амплитуды) осуществляется в разных временных режимах проверки. Когда результат вычисления согласования картин больше конкретного значения, считается, что возник потенциал действия нейрона, и "время обнаружения" и "значение амплитуды обнаружения" временно сохраняются в памяти.
Как было описано в разделе 1.3, период 24 нервного импульса составляет примерно от 0,5 до 4 мс. Соответственно, для осуществления точной и эффективной обработки сигнала на этом изменении в течение периода, желательно, чтобы частота системного тактового сигнала, передаваемого по линии 82 передачи для системного тактового сигнала и сигнала меток времени на фиг. 23 (b) составляла в пределах от 10 кГц до 1 МГц. Сигнал меток времени задается как значение счетчика, увеличивающееся на 1 с каждым тактовым импульсом согласно этой частоте системного тактового сигнала ("1" прибавляется с каждым системным тактовым импульсом). Кроме того, этот сигнал меток времени (это двоичное значение счетчика синхронизируется с временным режимом системного тактового сигнала и переносится согласно NRZI (без возвращения к нулю и с инверсией)) и системный тактовый сигнал, повторяющийся конкретное число раз, размещаются и переносятся попеременно с течением времени. Время, когда старший бит этого сигнала ^меток времени приходит на входную часть 85 схемы обнаружения жизнедеятельности, определяется. как "время, указанное сигналом меток времени", и все ячейки 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса синхронизируются с этим временем.
Первоначально, во входной части 85 схемы обнаружения жизнедеятельности, "время обнаружения" и "значение амплитуды обнаружения" потенциала действия нейрона временно сохраняются в памяти в соответствии с сигналом передачи из линии 82 передачи для системного тактового сигнала и сигнала меток времени. Информация, таким образом, хранящаяся в памяти в течение конкретного периода времени, выводится в выходную линию 83 для сигнала обнаружения жизнедеятельности во временном режиме, назначенном извне.
Здесь, в выходной линии 83 для сигнала обнаружения жизнедеятельности, выходной временной режим назначается каждой ячейке 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса, и сигнал, временно хранящийся в памяти, передается по выходной линии 83 для сигнала обнаружения жизнедеятельности во временном режиме, таким образом, назначенном заранее.
Таким образом, сигналы от всех ячеек 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса, собранные в выходной линии 83 для сигнала обнаружения жизнедеятельности, используются для: (а) достижения высокой точности и высокой надежности сигнала обнаружения на основании статистического процесса; и (b) вычисления участка возбуждения потенциала действия (или активации) в живом объекте. Указанные пункты (а) и (b) осуществляются во внутренней части (не показана на фигуре) схемы обнаружения жизнедеятельности.
Опишем сначала первый процесс. Каждый сигнал от всех ячеек 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса включает в себя "время обнаружения" потенциала действия. Соответственно, когда потенциал действия можно обнаруживать точно, сигнал обнаружения потенциала действия получается от соседней ячейки 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса в том же временном режиме.
Таким образом, если не удается получить сигнал обнаружения потенциала действия от соседней ячейки 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса в этом временном режиме, считается, что происходит "ложное обнаружение" в конкретной входной части 85 схемы обнаружения жизнедеятельности, которое затем удаляется из целей обнаружения. Осуществляя процесс сравнения на сигналах (временах обнаружения потенциалов действия), полученных из такого множества ячеек 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса, можно добиться более высокой точности и более высокой надежности сигнала обнаружения.
Со ссылкой на фиг. 24, ниже описан способ вычисления участка возбуждения потенциала действия (или активации) в живом объекте, причем способ вычисления осуществляется внутренней частью схемы обнаружения жизнедеятельности. Когда потенциал действия возбуждается нейроном в позиции α в части 75 организма, где требуется произвести обнаружение (голове испытуемого), сигнал обнаружения можно получить из каждого пятна в двухмерно организованной матрице 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса. Согласно электромагнетизму, зарегистрированное значение амплитуды сигнала обнаружения, полученного из каждого пятна в двухмерно организованной матрице 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса, может соответствовать распределению интенсивности магнитного поля, сформированного дипольным моментом (точечным магнитным зарядом) в позиции α.
Таким образом, зарегистрированное значение амплитуды сигнала, полученного из каждого пятна (п, ρ, σ, υ, ψ) в двухмерно организованной матрице 71 ячеек для обнаружения изменения свойства ядерного магнитного резонанса обратно пропорционально квадрату расстояния (rп rρ, rσ, rυ, rψ) от каждого пятна до позиции α. В связи с этим, после сглаживания "зарегистрированных значений амплитуды" в одно и то же "время обнаружения", полученных от соответствующих ячеек 80 обнаружения для обнаружения изменения свойства ядерного магнитного резонанса, для устранения пиковых шумовых компонент, используется соотношение, представленное на фиг. 24. В результате, можно оценивать активированный участок в части 75 организма, где требуется проводить обнаружение (голову и т.п. испытуемого).
Оценка активированного участка соответствует выделению сигнала обнаружения жизнедеятельности в (3) раздела 6.1.3. Соответственно, необходимо выравнивать. положение выделения сигнала обнаружения жизнедеятельности или идентифицировать положение выделения, как описано в (1) и (2) раздела 6.1.3. Для этой операции, необходимо заранее измерить картину распределения концентрации внутренней воды или картину распределения концентрации внутреннего жира согласно традиционному способу обнаружения МРТ с использованием секции обнаружения сигнала, описанной на фиг. 23, или традиционного устройства МРТ. Затем, шаблон изображения, полученный традиционным способом обнаружения МРТ, и результат выделения сигнала обнаружения жизнедеятельности объединяются, и осуществляется выравнивание (идентификация положения) активированного участка (или области, где часто возбуждаются потенциалы действия).
Затем, из внутренней части схемы обнаружения жизнедеятельности, предусмотренной в секции обнаружения сигнала (см. раздел 6.1.3 в отношении определений терминов), «сигнал внутреннего активированного участка (сигнал положения и диапазона активированной области)», «сигнал количества потенциалов действия на участок в течение каждого терма установки», «внутренний канал передачи сигнала на основании частоты возбуждения в активированном участке», и т.п. выводится в качестве сигнала обнаружения жизнедеятельности.
6.3.4) Способ подавления помех от других, соседних систем обнаружения жизнедеятельности
В способе измерения жизнедеятельности в настоящем примерном варианте осуществления, величина сигнала обнаружения жизнедеятельности очень мала, и, кроме того, необходимо освещать субъект измерения светом освещения для обнаружения жизнедеятельности. Таким образом, в случае, когда множество разных секций 101 обнаружения жизнедеятельности располагается в близких друг другу позициях, существует опасность того, что на секцию 101 обнаружения жизнедеятельности будет оказывать влияние (помеху) свет 115 освещения для обнаружения жизнедеятельности из другой секции 101 обнаружения жизнедеятельности. Для уменьшения этой помехи, в этом примерном варианте осуществления, каждый свет 115 освещения для обнаружения жизнедеятельности имеет идентификационную информацию, что позволяет количественно измерять Степень влияния другого света 115 освещения для обнаружения жизнедеятельности. Это позволяет компенсировать помеху посредством вычислительного процесса на стороне обнаружение, таким образом гарантируя высокую точность обнаружения жизнедеятельности даже если они создают некоторую физическую помеху друг для друга.
Ниже описан способ, в котором каждый свет 115 освещения для обнаружения жизнедеятельности сконфигурирован так, что имеет идентификационную информацию. Как было описано в объяснении в разделе 4.7 (касательно обнаружения слабого сигнала), модуляция по интенсивности заранее осуществляется на свете 115 освещения для обнаружения жизнедеятельности с использованием генератора 113 или 118 сигнала модуляции. В настоящем примерном варианте осуществления, в качестве метода модуляции применяется метод модуляции, именуемый MSK (манипуляцией с минимальным фазовым сдвигом), где используется комбинация (во временной последовательности) только двух типов частот, т.е. основной частоты и частоты, в 1,5 раза превышающей основную частоту. Фиг. 27(а) демонстрирует способ, в котором каждый свет 115 освещения для обнаружения жизнедеятельности сконфигурирован так, что имеет идентификационную информацию с использованием MSK. Время освещения светом 115 освещения для обнаружения жизнедеятельности делится на период 440 обнаружения жизнедеятельности и период 441 выражения внутренней информации секции обнаружения жизнедеятельности. При этом в течение периода 440 обнаружения жизнедеятельности, свет 115 освещения для обнаружения жизнедеятельности 115 подвергается модуляции по интенсивности с единственной частотой, равной только основной частоте, и с постоянной амплитудой, и в течение этого периода обнаруживаются жизнедеятельности. Кроме того, в случае управления жизнедеятельностью, субъект измерения освещается сильным и непрерывным светом 115 освещения для обнаружения жизнедеятельности (линейным светом освещения без модуляции по интенсивности) только в течение конкретного промежутка в этом периоде 440 обнаружения жизнедеятельности. С другой стороны, в течение периода 441 выражения внутренней информации секции обнаружения жизнедеятельности, свет 115 освещения для обнаружения жизнедеятельности модулируется на основе MSK. Даже в случае управления жизнедеятельностью, интенсивность и метод модуляции света 115 освещения для обнаружения жизнедеятельности остаются такими же, как в течение периода обнаружения. Таким образом, свет 115 освещения для обнаружения жизнедеятельности можно стабильно регистрировать в течение периода 441 выражения внутренней информации секции обнаружения жизнедеятельности. Таким образом, идентификационную информацию каждого света 115 освещения для обнаружения жизнедеятельности можно распознавать независимо от периода обнаружения или периода управления жизнедеятельностью.
Состояние модуляции света 115 освещения для обнаружения жизнедеятельности в течение периода 441 выражения внутренней информации секции обнаружения жизнедеятельности показано на фиг. 27(b). Период модуляции по интенсивности на частоте, в 1,5 раза превышающей основную частоту, продолжается в течение периода синхронного сигнала 451. Соответственно, временной режим начала периода 441 выражения внутренней информации секции обнаружения жизнедеятельности легко найти путем обнаружения этого синхронного сигнала 451. После этого, свет 115 освещения для обнаружения жизнедеятельности генерируется на основании первоначально комбинационной картины из: основной частоты, которая базируется на частоте MSK и соответствует ID информации 452 для идентификации производителя секции обнаружения жизнедеятельности; и частоты, в 1,5 раза превышающей основную частоту. Путем идентификации ID информации 452 для идентификации производителя секции обнаружения жизнедеятельности, секция 101 обнаружения жизнедеятельности может идентифицировать производителя, который изготовил секцию обнаружения жизнедеятельности, расположенную в соседней позиции. Затем возникает первоначальная комбинационная картина основной частоты, указывающей идентификационную информацию 453 соответствующей секции обнаружения жизнедеятельности, и частоты, в 1,5 раза превышающей основную частоту. В этом примерном варианте осуществления, серийный номер изделия соответствующей секции обнаружения жизнедеятельности показан как идентификационная информация 453, но альтернативно, если все секции обнаружения жизнедеятельности имеют разные картины (информацию), идентификационная информация 453 может иметь другую информацию, кроме серийного номера изделия. Первоначальная информация 454, связанная с производителем, которая затем может быть установлена производителем для идентификационной информации 453, может быть показана посредством модуляции MSK.
Далее будет объяснен способ устранения влияния в отношении обработки сигнала в случае, когда помеха возникает между разными секциями обнаружения жизнедеятельности. Световые излучения не синхронизируются между разными секциями обнаружения жизнедеятельности, и, таким образом, периоды 441 выражения внутренней информации секций обнаружения жизнедеятельности наступают в разных временных режимах. В период 440 обнаружения жизнедеятельности, в течение которого одна секция обнаружения жизнедеятельности излучает свет, период 441 выражения внутренней информации другой секции обнаружения жизнедеятельности в другом устройстве также может наступать одновременно. В этом случае, в течение периода 440 обнаружения жизнедеятельности, когда одна секция обнаружения жизнедеятельности излучает свет, в нее поступает модулированный свет с частотой, в 1,5 раза превышающей основную частоту, что позволяет немедленно найти световую помеху. Кроме того, в течение периода синхронного сигнала 451, модуляция по интенсивности продолжается с частотой, в 1,5 раза превышающей основную частоту, что позволяет с высокой точностью обнаруживать уровень утечки (уровень помехи) путем сравнения значений амплитуды на, соответствующих частотах после анализа спектра. Вычислительный процесс осуществляется на основании результата обнаружения, таким образом, по большей части, устраняя влияние других секций 101 обнаружения жизнедеятельности. Таким образом, когда каждый свет 115 освещения для обнаружения жизнедеятельности сконфигурирован так, что имеет идентификационную информацию, показанную на фиг. 27, жизнедеятельность можно обнаруживать стабильно и с высокой точностью, даже если помеха обусловлена другими секциями 101 обнаружения жизнедеятельности.
6.5) Способ измерения жизнедеятельности
6.5.4) Другие способы измерения жизнедеятельности
Нервная система млекопитающего животного, включая человека, имеет иерархическую структуру. На уровне 7 центральной нервной системы, например, уровне коры головного мозга, формируются очень сложные нейронные схемы, и, таким образом, очень трудно генерировать персональную информацию или даже информацию жизнедеятельности из зарегистрированного оттуда сигнала обнаружения жизнедеятельности.
Однако нейронные схемы между слоями соединены друг с другом, поэтому деятельность осуществляются совместно с соответствующими уровнями.
В связи с этим, другой примерный вариант осуществления отличается тем, что "информация жизнедеятельности генерируется из сигнала обнаружения жизнедеятельности более низкого уровня, что позволяет оценивать информацию жизнедеятельности более высокого уровня" в качестве меры трудности получения информации жизнедеятельности, связанной с уровнем 7 центральной нервной системы, включающим в себя уровень коры головного мозга или лимбическую систему.
Говорят, что миндалевидное тело играет главную роль в отношении эмоциональной реакции в головном мозгу человека или животного, и эмоциональная реакция выражается в центральном миндалевидном ядре (Hideho Arita: Nounai busshitsu no sisutemu shinkei seirigaku (Chugai-igakusha, 2006) p. 105). Выходной сигнал центрального миндалевидного ядра поступает непосредственно в ядро мимической моторики (Masahiko Watanabe: Nou Shinkei Kagaku Nyumon Koza (Ge) (Yodosha, 2002), p. 222).
Здесь, это ядро мимической моторики действует на мимическую мышцу для управления выражением лица. Соответственно, эмоциональная реакция, выраженная в центральном миндалевидном ядре, непосредственно проявляется в выражении лица.
С другой стороны, примечательно, что не существует нейронной схемы, непосредственно соединяющей центральное миндалевидное ядро с корой головного мозга, и выходной сигнал этого центрального миндалевидного ядра достигает префронтальной коры, например, через медиальное ядро в миндалевидном теле. Кроме того, это медиальное ядро принимает сигналы, поступающие от других участков миндалевидного тела, таламуса или гипоталамуса (Masahiko Watanabe: Nou Shinkei Kagaku Nyumon Koza Gekan (Yodosha, 2002), p. 221).
Когда выходной сигнал центрального миндалевидного ядра достигает префронтальной коры, внося при этом некоторое изменение, ощущение, воспринимаемое в префронтальной коре, становится немного отличным от подсознательной эмоции, возникающей в центральном миндалевидном ядре. Это указывает возможность того, что «выражение лица демонстрирует эмоцию точнее, чем человек знает о ней».
В связи с этим, другой объясненный здесь вариант осуществления отличается тем, что вместо получения сигнала обнаружения жизнедеятельности от уровня 7 центральной нервной системы, включающего в себя уровень коры головного мозга, обнаруживается движение мимической мышцы, формируемое под действием ядра мимической моторики, и информация жизнедеятельности генерируется из сигнала обнаружения. Соответственно, нет необходимости получать информацию жизнедеятельности из уровня 7 центральной нервной системы (включающего в себя уровень коры головного мозга или лимбическую систему) для которого интерпретация жизнедеятельности очень сложна и трудна, и можно получать точную информацию об эмоциональной реакции, связанной с лимбической системой или корой головного мозга из результата "интерпретации движения мимической мышцы", которую сравнительно легко интерпретировать.
В этом случае, помеченная позиция 40 на поверхности живого объекта, показанная на фиг. 16, соответствует позиции лица испытуемого (или пользователя). Между тем, в настоящее время существуют цифровые камеры с функцией автоматического обнаружения позиции лица субъекта с использованием метода распознавание изображений. В связи с этим, в этом другом варианте осуществления, объясненном здесь, секция мониторинга позиции в отношении точки обнаружения жизнедеятельности (секция для осуществления первого обнаружения) выполнена с возможностью иметь метод распознавания изображений, и предполагается, что сигнал обнаружения из позиции лица испытуемого (или пользователя) является сигналом обнаружения жизнедеятельности.
Кроме того, в случае выполнения другого описанного здесь примерный вариант осуществления, размер шаблона формирования изображения стандартизуется до размера, позволяющего показывать лицо испытуемого (или пользователя) целиком, и сохраняется в секции 142 памяти внутренней части, на стадии процесса "А] изменение размера шаблона формирования изображения (стандартизация размера)". Если размер лица испытуемого стандартизуется до заранее определенного размера, таким образом, независимо от того, насколько мало/велико лицо испытуемого или расстояние между испытуемым и секцией 103 обнаружения сигнала, простота и точность обнаружения позиции глаз или рта на лице повышаются, облегчая, таким образом, генерацию информации жизнедеятельности из сигнала обнаружения жизнедеятельности.
Фиг. 25 демонстрирует соотношения между выражением лица и эмоциональной реакцией. Фиг. 25 (а) демонстрирует выражение лица в состоянии покоя, фиг. 25(b) демонстрирует выражение лица, когда человек улыбается, фиг. 25(с) демонстрирует выражение лица, когда человек злится, и фиг. 25(а) демонстрирует выражение лица, когда человек горюет (они могут быть трудноотличимы друг от друга вследствие плохого качества рисунков, но призваны демонстрировать соответствующие выражения лица). Выражение показывает ощущение испытуемого (или пользователя). Мышечные движения на лице при этом показаны стрелками на фиг. 26. Когда человек улыбается, как на фиг. 25(b), наружные мышцы бровей и глаз сокращаются вниз. Кроме того, наружные мышцы рта сокращаются вверх и наружу. Когда человек злится, как на фиг. 25(с), наружные мышцы бровей и верхних век сокращаются вверх, и мышцы нижних век сокращаются вниз. Одновременно, наружные мышцы рта сокращаются вниз и наружу. С другой стороны, когда человек горюет, как показано на фиг. 25(d), внутренние мышцы под бровями сокращаются внутрь. Кроме того, одновременно, мышцы вокруг нижних век сокращаются, поднимая нижние веки вверх. Таким образом, результат обнаружения состояний сокращения и релаксации мимических мышц коррелирует с информацией жизнедеятельности, соответствующей эмоциональной реакции и т.п.
При сокращении мимической мышцы происходит активация нервно-мышечного синапса 5 (изменение потенциала мембраны) и последующее изменение 27 потенциала мембраны мышечного волокна. Соответственно, изменение потенциалов мембран можно обнаруживать с использованием света в ближнем инфракрасном диапазоне/инфракрасного света, как показано в разделе 4.7 или ядерного магнитного резонанса, как показано в разделе 5.2.
Кроме того, при сокращении мимической мышцы, происходит изменение концентрации кислорода в капиллярах вокруг мимической мышцы, что позволяет "обнаруживать изменения концентрации кислорода в крови в окружающих участках" с использованием света в ближнем инфракрасном диапазоне.
Кроме того, при сокращении мимической мышцы или повторных сокращениях и релаксациях, тепло, генерируемое внутри мышцы достигает поверхности лица, таким образом, локально повышая температуру на поверхности кожи лица. Соответственно, даже если распределение температуры на поверхности кожи лица измеряется с использованием термографии, обнаружение жизнедеятельности можно осуществлять в отношении деятельности мимической мышцы.
11) Другие применяемые варианты осуществления в отношении обнаружения/управления жизнедеятельностью
11.1) Другие явления жизнедеятельности, в которых состояния сокращения и расслабления скелетной мышцы подлежат обнаружению/управлению
В качестве примеров динамических жизнедеятельностей, возникающих в живом объекте, в главах 1-5 в основном идет речь о способах обнаружения состояния потенциала действия и состояния передачи сигнала нервной системы. Однако настоящий примерный вариант осуществления не ограничивается ими, и каждое "обнаружение, измерение или управление динамическими жизнедеятельностями в живом объекте бесконтактным способом" будет включено в настоящий примерный вариант осуществления или применяемые варианты осуществления. В объяснении раздела 6.5.4 со ссылкой на фиг. 25 и 26, обнаружение состояния передачи сигнала в нервно-мышечный синапс (активации нервно-мышечного синапса 5) используется для обнаружения состояний сокращения и релаксации скелетной мышцы. В качестве применяемого варианта осуществления вышеописанного примерного варианта осуществления, глава 11 поясняет способ непосредственного обнаружения фактического состояния сокращения и фактического состояния релаксации скелетной мышцы и его принцип. Кроме того, здесь объясняется способ управления сокращения/релаксации скелетной мышцы с использованием принципа обнаружения.
Согласно В. Alberts et. al.: Molecular Biology of the Cell, 4th Edi. (Garland Science, 2002) Chap. 16, процесс сокращения скелетной мышцы состоит, в основном, из следующих двух этапов:
a] управление для обеспечения сокращения скелетной мышцы путем выпуска ионов кальция в мышечную клетку; и
b] сокращение скелетной мышцы за счет миграции миозина в актиновые нити мышечной клетки.
При этом, "передача сигнала в нервно-мышечный синапс (активация нервно-мышечного синапса 5)" объясненная в разделе 6.5.4, происходит как предварительный этап непосредственно перед вышеупомянутым этапом [а].
На этапе сокращения скелетной мышцы в [b], «деформация миозина», «присоединение головы миозина к актиновым нитям», «восстановление формы миозин в состоянии контакта» и "отсоединение головы миозина от актиновых нитей" повторяются. Здесь, "деформация миозина" происходит с использованием гидролиза АТФ (аденозинтрифосфата). Таким образом, часть миозина включает в себя конкретный фермент, именуемый, миозиновой АТФазой, и когда с ней связан АТФ, в котором последовательно соединены три фосфорила, одна соседняя молекула воды включается в ее состав, и один из фосфорилов удаляется из связи.
Таким образом, сокращение скелетной мышцы требует «присоединения головы миозина к актиновым нитям». Однако, при релаксации скелетной мышцы, тропомиозин занимает это место образования связи препятствует «присоединению головы миозина к актиновым нитям». При этом, когда происходит "передача сигнала в нервно-мышечный синапс (активация нервно-мышечного синапса 5)", объясненная в разделе 6.5.4, большое количество ионов кальция перетекает в это место на этапе [а]. Когда ион кальция, таким образом втекающий при этом, связывается с тропонином, тропомиозин, соединенный с тропонином, смещается, обеспечивая "присоединение головы миозина к актиновым нитям". Когда этот ион кальция связывается с тропонином, оценивается, что ионная связь формируется между остатком аспартата, включенным в тропонин, или карбоксильной группой, составляющей часть остатка глютамата, и ионом кальция Са2+.
11.3) Механизм переноса миозиновой АТФазы
Частичная молекулярная структура, где АТФ связан с активным центром, имеющим функцию миозиновой АТФазы в миозине, описан на стр. 15850 в I. Rayment: Journal of Biological Chemistry vol. 271 (1996), и фрагмент ее главной части показан на фиг. 29. На фиг. 29, жирная сплошная линия указывает ковалентную связь, жирная волнистая линия указывает ионную связь, и вертикальная линия, выполненная из поперечных непрерывных линий, указывает водородную связь. Кроме того, стрелка тонкой сплошной линии указывает направление смещения распределение вероятности электрона связывающей орбитали (распределение плотности электронного облака). Здесь, АТФ имеет молекулярную структуру, в которой к аденозину последовательно присоединено три фосфорила, но на фиг. 29, состояние, в котором к аденозину один присоединен фосфорил, совместно описан как АМФ (аденозинмонофосфат). Говорят, что ион магния Mg2+ играет важную роль в гидролизе АТФ, и молекула воды, активированная под действием иона магния Mg2+, непосредственно действует на место образования связи между двумя фосфорилами для разрыва связи. Кроме того, активный центр, имеющий функцию миозиновой АТФазы в миозине, включает в себя лизин Lys185 и аспарагин Asn235. Здесь, число на фиг. 29 указывает порядковый идентификационный номер аминокислоты в миозине, который является белком.
Когда АТФ связывается с активным центром, имеющим функцию миозиновой АТФазы, его атомы кислорода O5- и O2 образуют водородную связь с частью остатка лизина Lys185 и частью остатка аспарагина Asn235. Кроме того, атом водорода H1 в молекуле воды вокруг АТФ образует водородную связь с атомом кислорода O2 в АТФ. С другой стороны, ион магния Mg2+ образует слабую ионную связь с атомом кислорода O1 в молекуле воды, таким образом, активируя молекулу воды.
Кроме того, также предполагается, что ион магния Mg2+ также образует слабую ионную связь с атомом кислорода O9 в другой молекуле воды, а также образует слабые ионные связи с двумя атомами кислорода O3- и O8- в АТФ. Говорят, что в водной среде в живом объекте (рН около 7), АТФ заряжается отрицательным электричеством, и его γ фосфорил и β фосфорил соответствуют двум отрицательным электрическим зарядам и одному отрицательному электрическому заряду, соответственно.
На фиг. 29, для удобства объяснения, предполагается, что каждый из O3-, O5- и O8- заряжен одним отрицательным электрическим зарядом. Когда остаток лизина Lys185 и двухвалентный ион магния Mg2+, заряженные положительным электрическим зарядом в водной среде в живом объекте (рН около 7), связываются с ними, формируется в целом электрически нейтральное состояние. Когда каждая молекула располагается в трех измерениях для формирования, таким образом, различных связей, вероятность существования электрона (плотность распределение электронного облака) вокруг атома кислорода O5- в АТФ совершает движение α к атому азота N1+, заряженному положительным электричеством, через атом водорода Н2 в остатке лизина Lys185, как было описано на фиг. 57 (b). Затем, для обеспечения снижения плотности электронного облака вокруг атома кислорода O5-, часть электронной вероятности связывающей орбитали между атомом фосфора РГ и атомом кислорода O2 перемещается в направлении β.
С другой стороны, поскольку атом кислорода O2, связывающий два фосфорила в АТФ, образует водородную связь с атомом водорода Н6 в остатке аспарагина Asn235, часть распределения плотности электронного облака, расположенного вокруг атома кислорода O2, немного перемещается к атому азота N2 через атом водорода Н6, как показано стрелкой γ. Кроме того, для обеспечения значительного недостатка плотности электронного облака вокруг иона магния Mg2+, имеющего два положительных электрических заряда, распределение плотности электронного облака совершает движение δ от окрестности атома кислорода O2 через атом фосфора Р2 и атом кислорода O8-.
В результате, плотность электронного облака вокруг атома кислорода O2 значительно уменьшается, но поскольку этот атом кислорода O2 образует водородную связь с атомом водорода H1 в молекуле воды, использование этого пути водородной связи препятствует снижению плотности электронного облака. В частности, электронная вероятность связывающей орбитали между атомом кислорода O1 и атомом водорода H1 в молекуле воды уменьшается, как показано стрелкой ε, и вероятность существования электрона водородной связи возрастает. Увеличенные таким образом электроны действуют как связывающая орбиталь между атомом водорода H1 и атомом кислорода O2, таким образом, формируя ковалентную связь между атомом водорода H1 и атомом кислорода O2. Кроме того, ион магния Mg2+ оттягивает плотность периферийного электронного облака к его периметру, из-за чего электронное облако течет в направлении стрелки ζ.
В результате этого, вероятность существования электрона связывающей орбитали между атомом кислорода O1 и атомом водорода H1 в молекуле воды уменьшается, и ковалентная связь превращается в водородную связь. В соответствии с этим превращением, расстояние между атомом кислорода O1 и атомом водорода H1 увеличивается, но описание, касающееся изменения расстояния, опущено на фиг. 29. Когда смещение плотности электронного облака происходит в направлениях, указанных, таким образом, стрелками ε и ζ, плотность электронного облака вокруг атома кислорода O1 значительно уменьшается, и молекула воды активируется. Это вынуждает атом кислорода O1 принимать плотность электронного облака вокруг атома фосфора Р1, соседствующего с атомом кислорода O1, для обеспечения пониженной плотности электронного облака вокруг атома кислорода O1 (η).
Это приводит к тому, что плотность электронного облака между атомом фосфора Р1 и атомом кислорода O1 возрастает, и вероятность существования электрона действует как связывающая орбиталь между атомом фосфора Р1 и атомом кислорода O1. Таким образом, между атомом фосфора Р1 и атомом кислорода O1 образуется ковалентная связь. С другой стороны, ион магния Mg2+ оттягивает плотность ее периферийного электронного облака к его периметру, из-за чего электронное облако дополнительно течет в направлении, указанном стрелкой θ. Затем плотность электронного облака перемещается в направлениях, указанных стрелками β, γ, δ, η и θ, что значительно снижает вероятность существования электрона связывающей орбитали между атомом фосфора Р1 и атомом кислорода O2. Когда, в результате этого, между атомом фосфора Р1 и атомом кислорода O2 возникает область, где вероятность существования электрона равна "0", как показано на фиг. 57(с), связывающая орбиталь между атомом фосфора Р1 и атомом кислорода O2 превращается в антисвязывающую орбиталь, и связь между атомом фосфора Р1 и атомом кислорода O2 разрушается.
Подводя итоги рассмотрению механизма гидролиз АТФ, можно упомянуть следующие моменты, показанные на фиг. 29(b).
- Ковалентная связь между атомом кислорода O1 и атомом водорода H1 в молекуле воды превращается в водородную связь, и водородная связь между атомом кислорода O2 и атомом водорода H1 в АТФ превращается в ковалентную связь.
- Согласно фиг. 29(b), γ фосфорил и β фосфорил, в центре каждого из которых находится атом фосфора Р1 и атом фосфора Р2, получают гидроксильную группу -ОН сразу после гидролиза АТФ на участке, где связь между атомом фосфора Р1 и атомом кислорода O2 превращается в связь между атомом фосфора Р1 и атомом кислорода O1, но связь между ОН немедленно разрушается в водной среде (рН 7) в теле.
Реакция гидролиза АТФ заметно отличается тем, что "γ фосфорил (его атом кислорода O5) /β фосфорил (его атомы кислорода O2 и O6) образуют, соответственно, водородные связи с остатком лизина Lys185/ остатком аспарагина Asn235" в ходе реакции.
11.4) Характеристики обнаружения/управления жизнедеятельностью
Раздел 11.4 относится к надлежащему диапазону длин волны электромагнитной волны (света), подлежащему использованию во время оптического обнаружения/измерения или управления состояний сокращения и расслабления скелетной мышцы и осуществляет обследование с широкой точки зрения. Надлежащий диапазон длин волны во время обнаружения или измерения состояния потенциала действия нейрона ранее объяснен в разделе 4.7. В данном разделе, прежде всего, более детально рассмотрено объяснение, данное в разделе 4.7, и затем рассмотрен подходящий диапазон длин волны электромагнитной волны (света), подлежащий использованию для обнаружения/измерения или управления бесконтактным способом в отношении более общих динамических жизнедеятельностей, возникающих «в живом объекте», а также состояния потенциала действия нейрона и состояний сокращения и расслабления скелетной мышцы. Затем, на основании общих результатов рассмотрения, рассматривается надлежащий диапазон длин волны электромагнитной волны (света), подлежащий использованию во время обнаружения или управления состояний сокращения и расслабления скелетной мышцы.
Настоящий примерный вариант осуществления или его применяемый вариант осуществления заметно отличается тем, что:
[1] обнаружение/измерение или управление осуществляется в отношении динамических жизнедеятельностей, возникающих "в живом объекте». Более конкретный его признак состоит в том, что: для осуществления обнаружения/измерения или управления,
[2] обнаружение/измерение или управление осуществляется с использованием перехода колебательной моды согласно взаимодействию внешнего электромагнитного поля (электромагнитной волны) с колебательной модой, которая имеет место во время активности в живом объекте, или когда активность изменяется, и которая обусловлена в это время двумя или более конкретными атомами в молекуле.
Кроме того, свет в ближнем инфракрасном диапазоне пригоден для электромагнитной волны, которая может проходить через "живой объект», и, властности, отличается тем, что:
[3] переход между колебательными модами, которые задействуют атом водорода (образующий водородную связь) легко взаимодействует со светом в ближнем инфракрасном диапазоне. Дело в том, что атом водорода является самым легким из атомов и, таким образом, легко совершает колебания с высокой скоростью (на высоких частотах) (согласно классической физике). Соответственно, в примерном варианте осуществления или его применяемом варианте осуществления, имеющем признак [3], изменения поглощения света в ближнем инфракрасном диапазоне на меньших длинах волны (более высоких частотах), который в меньшей степени поглощается молекулами воды, можно легко обнаружить/измерить, что позволяет осуществлять обнаружение/измерение или управление жизнедеятельностью в сравнительно глубоком участке в живом объекте.
В отношении длин волны, которые отвечают вышеупомянутым признакам в настоящем примерном варианте осуществления или применяемом варианте осуществления, далее, прежде всего, рассмотрен [1] диапазон, в котором обнаружение/измерение или управление можно легко осуществлять "в живом объекте». Видимый свет не проходит через человеческую кожу, что не позволяет обследовать внутренние органы тела человека. В целом, видимый свет, имеющий длину волны 0,8 мкм или менее, плохо проходит через живой объект. Между тем, держа ладонь со сложенными пальцами против солнечного света, можно видеть красный свет, пробивающийся между пальцами. Из этого явления, можно понять, что свет, имеющий длину волны, большую, чем красного света, до некоторой степени проходит через живой объект. В частности, эксперименты показывают, что свет, имеющий длину волны 0,84 мкм или более, проходит через кожу на поверхности живого объекта, легко проникая в живой объект. С другой стороны, как было описано в разделе 4.7, поскольку инфракрасный свет, имеющий длину волны более 2,5 мкм, хорошо поглощается молекулами воды в живом объекте (поскольку энергия возбуждение симметричных телескопических колебаний, антисимметричных телескопических колебаний и вращения молекул воды), электромагнитные волны, плохо проходят через него вследствие ослабления света. Как было описано в разделе 4.7, молекулы воды занимают 70% (по весу) химических соединений, составляющих животную клетку, поэтому световой пучок с длиной волны, на которой ослабление света вследствие поглощения, молекулами воды мало, может, проходить через живой объект. Соответственно, в случае, когда обнаружение/измерение или управление жизнедеятельностью осуществляется с использованием электромагнитной волны, которая "проходит через живой объект», желательно использовать свет в ближнем инфракрасном диапазоне, имеющий длину волны в пределах от 0,84 мкм (или 0,875 мкм) до 2,5 мкм.
Ниже, в частности, рассмотрен [1] диапазон, в котором обнаружение/измерение или управление можно легко осуществлять "в живом объекте». Как ранее было описано в разделе 4.7, существуют полосы поглощения, соответствующие комбинациям молекулы воды вокруг центральных длин волны 1,91 мкм и 1,43 мкм. Кроме того, существует другая полоса поглощения вокруг центральной длины волны 0,97 мкм, хотя поглощение света мало. Далее здесь подробно рассмотрены спектры поглощения воды в ближнем инфракрасном диапазоне, которые показаны на фиг. 2.1.1 на странице 12 и фиг. 4.6.1 на странице 180 работы Yukihiro Ozaki/Satoshi Kawata: Kinsekigai bunkouhou (Gakkai Shuppan Center, 1996), на которую мы ссылаемся в связи с вышеупомянутыми полосами поглощения. В результате, установлено, что диапазоны длин волны, указывающие половинные значения коэффициентов поглощения на наибольших длинах волны поглощения 0,97 мкм, 1,43 мкм и 1,91 мкм, заданы в диапазонах от 0,943 до 1,028 мкм, от 1,394 до 1,523 мкм и от 1,894 до 2,061 мкм, как показано на фиг. 28. Таким образом, поглощение света водой велико в этих диапазонах длин волны. Соответственно, в диапазонах длин волны от 0,84 мкм до 2,5 мкм, диапазон длин волны за исключением вышеупомянутых диапазонов соответствует диапазону, где поглощение света водой мало. Таким образом, в настоящем примерном варианте осуществления или применяемом варианте осуществления, когда поглощение света считается малым в полосе поглощения вокруг центральной длины волны 0,97 мкм (влияние поглощения света невелико), для обнаружения/измерения или управления жизнедеятельностью, желательно использовать электромагнитные волны, включающие в себя электромагнитную волну, имеющую длину волны в любом из первого применимого диапазона длин волны I от 2,061 мкм до 2,5 мкм, второго применимого диапазона длин волны II от 1,523 мкм до 1,894 мкм, и третьего применимого диапазона длин волны III от 0,84 мкм до 1,394 мкм, как показано на фиг. 28. Между тем, в случае, когда желательно удалить влияние (на поглощение света) индикатора концентрации кислорода в живой ткани во время обнаружения или управления жизнедеятельностью (см. раздел 4.7), третий применимый диапазон длин волны III будет составлять от 0,875 мкм до 1,394 мкм. При таком задании третьего применимого диапазона длин волны III, даже если в середине пути света обнаружения существует индикатор концентрации кислорода, свет обнаружения не поглощается, что позволяет поддерживать отношение С/Ш сигнала обнаружения жизнедеятельности. Кроме того, для предотвращения поглощения света в полосе поглощения, имеющей центральную длину волны 0,97 мкм, желательно использовать электромагнитные волны, включающие в себя электромагнитную волну, имеющую длину волны в любом из четвертого применимого диапазона длин волны IV от 1,028 мкм до 1,394 мкм и пятого применимого диапазона длин волны V от 0,84 мкм до 0,943 мкм (или от 0,875 мкм до 0,943 мкм) помимо вышеупомянутых диапазонов.
Естественно, желательный диапазон длин волны электромагнитной волны для обнаружения/измерения или управления жизнедеятельностью применяется к обнаружению или измерению состояния потенциала действия нейрона, объясненного в разделе 4.7. Затем, в отношении результата вышеприведенного рассмотрения,
[2] обнаружение или измерение состояния потенциала действия нейрона рассматривается с учетом признака настоящего примерного варианта осуществления или применяемого варианта осуществления, состоящего в том, что обнаружение/измерение или управление осуществляется с использованием взаимодействия внешнего электромагнитного поля с переходом между колебательными модами, возникающими между двумя или более конкретными атомами в молекуле во время активности в живом объекте, или когда активность изменяется. Во время обнаружения/измерения состояния потенциала действия нейрона, использование длины волны, соответствующей 1-му обертону, для перехода между антисимметричными телескопическими колебательными модами, в основном, обусловленными С-Н-Cl-, составляет от 2,05 до 2,48 мкм, согласно разделу 4.7. Однако этот диапазон длин волны перекрывается с диапазоном длин волны от 2,05 до 2,061 мкм, где вода сильно поглощает свет. Соответственно, желательно, чтобы электромагнитные волны, соответствующие 1-му обертону и используемые для обнаружения/измерения, включали в себя электромагнитную волну в диапазоне длин волны от 2,061 до 2,48 мкм, что позволяет избежать вышеупомянутого перекрытия диапазонов. Между тем, в случае, когда поглощение света водой в полосе поглощения, имеющей центральную длину волны 0,97 мкм, приводит к какой-либо проблеме, желательно, чтобы электромагнитные волны, соответствующие 3-му обертону перехода между антисимметричными телескопическими колебательными модами и используемые для обнаружения/измерения, включали в себя электромагнитную волну в диапазоне длин волны от 0,840 до 1,37 мкм согласно разделу 4.7. Кроме того, для устранения вышеописанного влияния со стороны индикатора концентрации кислорода, желательно, чтобы электромагнитные волны, соответствующие 3-му обертону и используемые для обнаружения/измерения, включали в себя электромагнитную волну в диапазоне длин волны от 0,875 до 1,37 мкм. Однако, во избежание влияния поглощения света водой в полосе поглощения, имеющей центральную длину волны 0,97 мкм, для получения высокоточного обнаружения/измерения, предпочтительно использовать электромагнитные волны, включающие в себя электромагнитную волну, имеющую длину волны в диапазоне либо от 0,840 мкм до 0,943 мкм (или от 0,875 мкм до 0,943 мкм), либо от 1,028 мкм до 1,37 мкм для обнаружения/измерения состояния потенциала действия нейрона.
С учетом признака [1] обнаружения/измерения или управления в живом объекте, а также признака [2] взаимодействия перехода между колебательными модами с внешним электромагнитным полем (электромагнитной волной), ниже описан случай осуществления обнаружения/измерения. или управления состояний сокращения и расслабления скелетной мышцы. Как было описано в разделе 11.1, сократительное/релаксационное движение скелетной мышцы осуществляется в два этапа:
a] управление для обеспечения сокращения скелетной мышцы путем выпуска ионов кальция в мышечную клетку; и
b] сократительная функция скелетной мышцы.
Соответственно, обнаружение/измерение или управление можно независимо осуществлять на каждом из двух этапов.
Объясним сначала способ обнаружения/измерения или способ управления, связанный с этапом [а]. Как описано в разделе 11.1, на этапе (а), предполагается наличие ионной связи между карбоксильной группой и ионом кальция Са2+. В этом случае, как описано в разделе 3.5, считается, что относительная светопоглощательная способность полосы поглощения, соответствующей симметричной телескопической колебательной моде единичной карбоксильной группы значительно уменьшается. Соответственно, в этом примерном варианте осуществления,
- изменение (резкое снижение) относительной светопоглощательной способности полосы поглощения, соответствующей симметричной телескопической колебательной моде карбоксильной группы, обнаруживается для обнаружения/измерения, находится ли скелетная мышца в сокращаемом состоянии,
или альтернативно,
- свет возбуждения в колебательной моде проецируется для повышения уровня энергии симметричной телескопической колебательной моды карбоксильной группы, что позволяет препятствовать образованию связи иона кальция Са2+ с карбоксильной группой и управлять действием сокращения/релаксации скелетной мышцы. Симметричная телескопическая колебательная мода карбоксильной группы, в общем случае, является основным состоянием (колебательным состоянием с самым низким уровнем энергии). При освещении светом возбуждения, соответствующим n-му обертону, уровень энергии симметричной телескопической колебательной моды карбоксильной группы возрастает. В случае слабых колебаний карбоксильной группы (низкого уровня энергии), ион кальция Са2+ легко образует связь с карбоксильной группой. С другой стороны, в случае, когда уровень энергии колебательной моды возрастает, даже если ион кальция Са2+ временно присоединен к ней, весьма вероятно, что ион кальция Са2+ отбрасывается (отделяется) вследствие высокой энергии. Таким образом, при освещении светом возбуждения, соответствующим n-му обертону, иону кальция Са2+ трудно присоединяться к карбоксильной группе, что затрудняет управление сокращением скелетной мышцы, и скелетная мышца остается в расслабленном состоянии.
Поскольку в разделе 3.5 показано только значение волнового числа опорного тона, возбуждающего симметричную телескопическую колебательную моду карбоксильной группы, ниже поясняется длина волны, соответствующая свету возбуждения n-го обертона. Нижеприведенное объяснение не ограничивается управлением сокращением/релаксацией скелетной мышцы, но может применяться в целом, к каждому примерному варианту осуществления или применяемому варианту осуществления, описанному в разделе 11.4, в котором [2] обнаружение/измерение или управление осуществляется с использованием перехода колебательной моды согласно взаимодействию внешнего электромагнитного поля (электромагнитной волны) с колебательной модой, которая имеет место во время активности в живом объекте, или когда активность изменяется, и которая обусловлена в это время двумя или более конкретными атомами в молекуле.
Первоначально, с использованием следующей формулы (А 38), как описано в разделе 4.5:
[фор. 38]

необходимая величина hνm энергии в то время, когда уровень энергии ε0 смещается к εm, выражается в виде:
[фор. 60]

Соответственно, из формулы (А 60), где частоты опорного тона, 1-го обертона и 2-го обертона полагаются равными ν1, ν2 и ν3, устанавливаются следующие соотношения:
[фор. 61]

[фор. 62]

С использованием полученных таким образом формул с (А 60) по (А 62), значение длины волны λm (частоты νm) (m-1)-го обертона можно оценивать из частот ν1, ν2 и ν3 опорного тона, 1-го обертона и 2-го обертона на основании ангармонических колебаний.
На основании документов, приведенных в порядке ссылки, длины волны λm опорного тона и (m-1)-го обертона, оцененный путем вычисления с использованием формул с (А 60) по (А 62) приведены в таблице 7. Среди значений, показанных в таблице 7, значение, к которому присоединен (1), упомянуто в Yukihiro Ozaki/Satoshi Kawata: Kinsekigai bunkouhou (Gakkai Shuppan Center, 1996) P. 218 to P. 219. С другой стороны, значение, к которому присоединен (2), получается путем объединения результат вычисления в разделе 3.5 со ссылкой из R.M. Silverstein and F.X. Webster: Spectrometric Identification of Organic Compounds 6th Edit. (John Wiley & Sons, Inc., 1998) глава 3, раздел 3-6. Кроме того, длина волны (m-1)-го обертона симметричных телескопических колебаний ионной карбоксильной кислотной группы -СОО- вычисляется посредством экстраполяции вычисленного значения колебаний С=O карбоновой кислоты -СООН с использованием значения длины волны опорного тона.
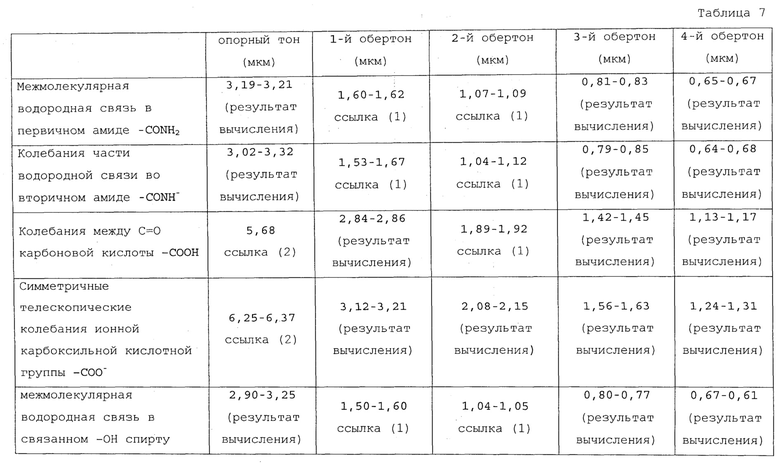 Большинство карбоксильных групп находится в состоянии ионной карбоксильной кислотной группы -СОО- в водной среде (рН= около 7) в живом объекте. Соответственно, свет возбуждения n-го обертона в отношении к симметричной телескопической колебательной моды карбоксильной группы в настоящем примерном варианте осуществления, в основном, соответствует строке "симметричные телескопические колебания ионной карбоксильной кислотной группы -СОО-" в таблице 7. Однако, даже в этой водной среде, существует вероятность того, что некоторые карбоксильные группы остаются в состоянии карбоновой кислоты -СООН, и ион кальция Са2+ связывается с этим ядром С=O. Соответственно, в а] управление для обеспечения сокращения скелетной мышцы путем выпуска ионов кальция в мышечную клетку, в настоящем примерном варианте осуществления, обе длины волны объединяются и предполагаются следующими:
Большинство карбоксильных групп находится в состоянии ионной карбоксильной кислотной группы -СОО- в водной среде (рН= около 7) в живом объекте. Соответственно, свет возбуждения n-го обертона в отношении к симметричной телескопической колебательной моды карбоксильной группы в настоящем примерном варианте осуществления, в основном, соответствует строке "симметричные телескопические колебания ионной карбоксильной кислотной группы -СОО-" в таблице 7. Однако, даже в этой водной среде, существует вероятность того, что некоторые карбоксильные группы остаются в состоянии карбоновой кислоты -СООН, и ион кальция Са2+ связывается с этим ядром С=O. Соответственно, в а] управление для обеспечения сокращения скелетной мышцы путем выпуска ионов кальция в мышечную клетку, в настоящем примерном варианте осуществления, обе длины волны объединяются и предполагаются следующими:
- диапазон длин волны, соответствующий 2-му обертону, предполагается от 1,89 до 2,15 мкм,
- диапазон длин волны, соответствующий 3-му обертону, предполагается от 1,42 до 1,63 мкм, и
- диапазон длин волны, соответствующий 4-му обертону, предполагается от 1,13 до 1,31 мкм.
Кроме того, аналогично разделу 4.7, ошибки измерения этих значений предполагаются равными около 10%. В связи с этим, соответствующие нижние пределы вышеупомянутых диапазонов равны 1,89×(1-0,05)=1,80, 1,42×(1-0,05)=1,35 и 1,13×(1-0,05)=1,07. Аналогично, их соответствующие верхние пределы равны 2,15×(1+0,05)=2,26, 1,63×(1+0,05)=1,71 и 1,31×(1+0,05)=1,38. Таким образом, диапазоны длин волны, включающие в себя ошибки измерения ±5% таковы:
- длина волны, соответствующая 2-му обертону, предполагается от 1,80 до 2,26 мкм,
- длина волны, соответствующая 3-му обертону, предполагается от 1,35 до 1/71 мкм, и
- диапазон длин волны, соответствующий 4-му обертону, предполагается от 1,07 до 1,38 мкм.
С учетом перекрывающихся частей, делается вывод, что «диапазон длин волны, подходящий для обнаружения/измерения или управления, составляет от 1,07 до 1,71 мкм и в пределах от 1,80 мкм до 2,26 мкм». Кроме того, благодаря исключению, из этого диапазона, диапазона длин волны, в котором свет сильно поглощается молекулами воды, как показано на фиг. 28, диапазон длин волны, подходящий для [а] обнаружения/измерения или управления связи между Са+ и карбоксильной группой -СОО-, составляет от 1,07 до 1,39 мкм, от 1,52 до 1,71 мкм и от 2,06 до 2,26 мкм. Этот диапазон длин волны показан на фиг. 28.
В случае, когда живой объект освещается электромагнитными волнами, включающими в себя электромагнитную волну, имеющую длину волны в диапазоне, объясненном в вышеприведенном описании, в настоящем примерном варианте осуществления или применяемом варианте осуществления, измерение/управление осуществляется следующим образом:
- сигнал, связанный с жизнедеятельностью, обнаруживается по величине поглощения или изменению поглощения электромагнитной волны, имеющей длину волны в вышеуказанном диапазоне в живом объекте, и сигнал обнаружения обрабатывается для измерения состояния жизнедеятельности; и
- величина освещения электромагнитной волны, имеющей длину волны в вышеуказанном диапазоне увеличивается в живом объекте (временно) для управления жизнедеятельностью. Таким образом, количество света электромагнитной волны, проецируемой на тело для обнаружения жизнедеятельности очень мало, в результате чего, доля карбоксильных групп, в которых возбуждена колебательная мода, в скелетной мышце, мала, и сама по себе жизнедеятельность не подвергается влиянию. Однако, когда количество света электромагнитной волны, проецируемой таким образом, увеличивается, большинство карбоксильных групп в скелетной мышце возбуждается, приводя к генерации колебаний, что затрудняет связывание с ними ионов кальция Са2+ и делает сокращение скелетной мышцы невозможным.
Кроме того, в настоящем примерном варианте осуществления или применяемом варианте осуществления, обнаружение/измерение и управление, связанные с жизнедеятельностью, могут осуществляться одновременно. В этом случае, хотя величина освещения электромагнитной волны, имеющей длину волны в вышеуказанном диапазоне, уменьшается для обнаружения/измерения жизнедеятельности и проверки ее активного состояния, осуществляется управление жизнедеятельностью (иногда путем увеличения количества света освещения).
Далее будет объяснен признак активности на молекулярном уровне, подлежащий использованию для обнаружения/измерения или управления в настоящем примерном варианте осуществления или применяемом варианте осуществления, то есть,
[3] случай, когда используется переход между колебательными модами, которые задействуют атом водорода (образующий водородную связь) (который ранее объяснен в этом разделе).
Как показано на фиг. 29, в реакции гидролиза АТФ в скелетной мышце, формируются водородные связи с частью остатка лизина Lys185 и частью остатка аспарагина Asn235. Для обеспечения стабильности реакции гидролиза за счет эффекта нейтрализации локальных зарядов, требуется "водородная связь между остатком аминокислоты, имеющим положительный электрический заряд, и АТФ, имеющим отрицательный электрический заряд". Таким образом, при гидролизе АТФ, водородные связи с остатками лизина Lys185 также очень часто формируются на других участках помимо скелетной мышцы. Таким образом, как описано в разделе 11.3, поскольку АТФ имеет отрицательный электрический заряд в водной среде с рН 7, для электрической нейтрализации необходимы локальные связи с ионом магния Mg2+ и остатком аминокислоты, имеющим положительный электрический заряд. Остаток аминокислоты, имеющий положительный электрический заряд, включен только в остаток аргинина за исключением остатка лизина Lys185, и в любом случае, атом водорода располагается вне положительно заряженной части. Соответственно, в электрически нейтральном состоянии, весьма вероятно, что водородная связь формируется между этим атомом водорода и атомом кислорода в АТФ. Кроме того, поскольку сам атом водорода, который участвует в этой водородной связи, легче других атомов, использование этого перехода между колебательными модами облегчает осуществление обнаружения/измерения или управления жизнедеятельностью в сравнительно глубоком участке в живом объекте, как описано выше.
Только малая часть остатка лизина и остатка аргинина образует водородную связь с молекулой воды (ее атомом кислорода), но полоса поглощения, возникающая при гидролизе АТФ, и полоса поглощения, обусловленная водородной связью с молекулой воды, имеют разные значения центральных длин волны по следующей причине. Фиг. 30(а) демонстрирует случай, когда часть остатка лизина Lys185 образует водородную связь с атомом кислорода в АТФ, и фиг. 30(b) демонстрирует случай, когда часть остатка лизина Lys185 образует водородную связь с атомом кислорода в молекуле воды. Когда расстояние между атомом водорода Н2, участвующим в водородной связи, и атомом кислорода O5 или O10 становится меньше оптимального значения, молекулу воды нелегко фиксировать, и, таким образом, относительные конфигурации между атомом кислорода O10 и атомами водорода Н9/Н10 не изменяются. Напротив, когда расстояние между атомом водорода Н2 и атомом кислорода O5 становится меньше оптимального значения, возникает искажение в АТФ, и внутримолекулярная энергия АТФ и всего лизина Lys185, образующего водородную связь, возрастает, как показано на фиг. 30(b).
В результате, величина увеличения энергии всей молекулы, в то время, когда расстояние между атомом водорода Н2 и атомом кислорода O5/O10 становится меньше оптимального значения, больше в случае водородной связи с частью в АТФ, чем в случае водородной связи с молекулой воды.
Фиг. 31 демонстрирует влияние на свойство потенциала ангармонических колебаний вследствие различия в молекулярной структуре, участвующей в водородной связи. Расстояние между двумя атомами, образующими электрический дипольный момент, отложенное на горизонтальной оси на фиг. 31, представляет расстояние между атомом водорода Н2 в остатке лизина Lys185 и атомом кислорода O5/O10 партнера по водородной связи в примере, показанном на фиг. 30. Свойство фиг. 30(а) соответствует штрихпунктирной линии на фиг. 31, а свойство фиг. 30(b) соответствует пунктирной линии на фиг. 31. Считается, что свойство потенциала в направлении, в котором два атома, образующие водородную связь, удаляются друг от друга (в направлении, в котором расстояние между атомом водорода Н2 и атомом кислорода O5/O10 становится больше оптимального значения) не подвергается большому влиянию молекулярной структуры, участвующий в водородной связи. С другой стороны, когда два атома, образующие водородную связь, сближаются (расстояние между атомом водорода Н2 и атомом кислорода O5/O10 становится меньше оптимальной величины), возникает искажение в молекулярной структуре АТФ в направлении, в котором расстояние между двумя атомами возрастает, как показано на фиг. 30 (а), в результате чего, значение разности полной энергии возрастает (что указано свойством пунктирной линии на фиг. 31).
Кроме того, поскольку значение разности полной энергии возрастает при сближении двух атомов, образующих водородную связь, значения коэффициентов k2 и k4 увеличиваются, как показано на фиг. 31. Следовательно, как показано в формуле (А 60), частота полосы поглощения возрастает (длина волны уменьшается). По этой причине, в зависимости от того, является ли партнером по водородной связи, с которым часть остатка лизина Lys185 образует водородную связь, АТФ или молекула воды, длина волны полосы поглощения изменяется. Кроме того, как показано в вышеприведенном объяснении, в зависимости от того, остаток какой аминокислоты участвует в водородной связи (например, является ли остаток аминокислоты остатком лизина Lys185, остатком аргинина или остатком аспарагина Asn235), значение длины волны полосы поглощения изменяется.
Таким образом, настоящий примерный вариант осуществления или применяемый вариант осуществления имеет тот эффект, что различие молекул, участвующих в образовании связи, оценивается из значения длины волны полосы поглощения, которое изменяется (временно) в течение жизнедеятельности, что позволяет идентифицировать различие между детальными жизнедеятельностями (внутренними реакциями). Кроме того, этот признак и эффект не ограничиваются сокращением/релаксацией в скелетной мышце и водородной связью, но применимы к любым жизнедеятельностям (внутренним реакциям), сопровождаемым (временными) изменениями в колебательной моде конкретного атома. Кроме того, когда эта избирательность по длине волны за счет различия молекул, участвующих в образовании связи, используется для управления жизнедеятельностью, что будет объяснено в главе 12, управление можно осуществлять согласно различию в надлежащей длине волны, благодаря чему, другие жизнедеятельности подвергаются меньшему влиянию. Это дает такой эффект, что можно ослабить непредвиденные побочные эффекты, обусловленные управлением жизнедеятельностью.
С другой стороны, из комбинации объяснений в главах 4 и 5, когда свойство потенциала ангармонических колебаний изменяется, как показано на фиг. 31, характеристика распределения электронов, расположенных вокруг атома водорода, участвующего в водородной связи, изменяется. В связи с этим, обнаружение или измерение любых жизнедеятельностей (внутренних реакций), сопровождаемых (временными) изменениями в колебательной моде конкретного атома, может осуществляться с использованием не только различия в значении длины волны полосы поглощения, но и различия в значении химического сдвига во время ядерного магнитного резонанса (см. Глава 5).
Детальное соответствие между значением длины волны полосы поглощения, соответствующим водородной связи, образующейся в процессе жизнедеятельности (внутренней реакции), и комбинацией молекул, участвующих в водородной связи, требует внесения данных теоретического вычисления и экспериментальных значений. В настоящем описании изобретения, вместо объяснения строгих значений, приведен обзор диапазона длин волны полосы поглощения с учетом ошибок измерения и различий в значениях обнаружения, обусловленных условиями измерения. Переход между колебательными модами, соответствующими водородной связи, образующейся при гидролизе АТФ, структурно имеет характеристику, близкую к строке "межмолекулярная водородная связь первичного амида -CONH2" в таблице 7. Водородная связь при гидролизе АТФ, соответствующая сокращению скелетной мышцы, связана с остатком лизина Lys185 и остатком аспарагина Asn235 (фиг. 29), но изменение центральной длины волны полосы поглощения в зависимости от различия в остатке аминокислоты, считается сравнительно малым. Диапазоны длин волны соответствующих полос поглощения совместно объяснены ниже. Как описано в разделе 4.7, когда диапазон изменения с учетом различия в значении обнаружения, обусловленного ошибками измерения или условиями измерения, оценивается равным ±15%, диапазоны изменения таковы: 1,60×(1-0,15)=1,36, 1,62×(1+0,15)=1,86, 1,07×(1-0,15)=0,91 и 1,09×(1+0,15)=1,25. Соответственно, при подытоживании значений, можно получить следующие диапазоны:
- диапазон длин волны полосы поглощения, соответствующей 1-му обертону, составляет от 1,36 мкм до 1,86 мкм; и
- диапазон длин волны полосы поглощения, соответствующей 2-му обертону, составляет от 0,91 мкм до 1,25 мкм.
В отношении полученных таким образом диапазонов, оставшиеся диапазоны, полученные исключением диапазонов длин волны, где присутствует сильное поглощение молекулой воды, показанных на фиг. 28, таковы:
- диапазон длин волны полосы поглощения, соответствующей 2-му обертону, составляет от 1,03 мкм до 1,25 мкм; и
- диапазон длин волны полосы поглощения, соответствующей 1-му обертону, составляет от 1,52 мкм до 1,86 мкм, как показано на фиг. 28.
Однако диапазоны до конца демонстрируют только диапазон обнаружения n-го обертона. Кроме того, полоса поглощения, соответствующая комбинациям, также включена в ближний инфракрасный диапазон. В связи с этим, когда диапазон длин волны для обнаружения комбинаций также принимается во внимание, первый, второй, третий, четвертый и пятый диапазоны длин волны с I по V с меньшим поглощением водой, показанные на фиг. 28, можно рассматривать как целевые диапазоны. Альтернативно, если величина поглощения в полосе поглощения для комбинаций велика и не подвергается сильному влиянию поглощения водой, желательный диапазон длин волны будет в пределах от 0,84 мкм (или 0,875 мкм) до 2,50 мкм, как показано в разделе 4.7. Кроме того, аналогично вышеизложенному описанию гидролиза АТФ, можно осуществлять следующее:
- обнаружение сигнала, связанного с жизнедеятельностью, на основании величины поглощения или изменения поглощения электромагнитной волны, имеющей длину волны в вышеуказанном диапазоне в живом объекте, и измерения состояния жизнедеятельности посредством обработки сигнала обнаружения; и
- управление жизнедеятельностью путем увеличения (временного) величины освещения электромагнитной волны, имеющей длину волны в вышеуказанном диапазоне в живом объекте (заметим, что обнаружение/измерение и управление могут осуществляться параллельно). Таким образом, для сокращения скелетной мышцы, атомы кислорода O2, O6 и O5- в АТФ образуют водородную связь с частью остатка лизина Lys185 и частью остатка аспарагина Asn235 непосредственно до реакции гидролиза АТФ (фиг. 29). При этом электромагнитная волна высокой интенсивности проецируется таким образом, что возбуждаются колебательные моды большинства атомов водорода Н6, Н5 и Н2/ участвующих в водородной связи. Это заставляет атомы водорода Н6, Н5 и Н2 колебаться в возбужденном состоянии, что приводит к разрыву водородных связей за счет энергии. В результате, АТФ утрачивает молекулярную конфигурацию, в которой гидролиз можно осуществлять, как показано на фиг. 29, что затрудняет реакцию гидролиза АТФ, в связи с чем, скелетная мышца не сокращаются и остается в расслабленном состоянии.
Вышеприведенное объяснение, в основном, посвящено обнаружению/измерению или управлению сокращением/релаксацией скелетной мышцы в качестве примера, но настоящий примерный вариант осуществления также применим к обнаружению/измерению или управлению любой активностью в живом объекте, связанной с "гидролизом АТФ" в качестве применяемого варианта осуществления. Например, обнаружение/измерение или управление вышеупомянутым способом применимы к функции ионного насоса для выкачивания конкретного иона из клетки наружу или фиксации углерода в процессе фотосинтеза в качестве операции с использованием гидролиза АТФ. Кроме того, согласно В. Alberts et. al.: Molecular Biology of the Cell, 4fch Edi. (Garland Science, 2002) Chap. 16, моторный белок используется для переноса вещества в клетке, в том числе, переноса вещества в нейронном аксоне, но гидролиз АТФ также используется для перемещения этого моторного белка. Соответственно, обнаружение/измерение или управление вышеупомянутым способом применимы к этому переносу вещества в клетке в порядке одного примера жизнедеятельностей.
11.5) Признаки способа обнаружения жизнедеятельности
В этом разделе поясняются характеристики сигнала обнаружения жизнедеятельности, полученного с использованием реакции гидролиза АТФ, для обнаружения мышечного сокращения и связанный с ним способ измерения. Однако настоящий примерный вариант осуществления не ограничивается вышеизложенным, и явление а] управления для обеспечения сокращения скелетной мышцы путем выпуска ионов кальция в мышечную клетку, описанное в предыдущем разделе, можно использовать для обнаружения мышцы. Первоначально, в качестве основы для обнаружения жизнедеятельности, участок мышцы освещается электромагнитной волной (светом), включающей в себя центральную длину волны полосы поглощения, которая возникает, когда часть остатка лизина Lys185 образует водородную связь с атомом кислорода в АТФ, как описано в предыдущем разделе (разделе 11.4), для обнаружения состояния поглощения электромагнитной волны (света). Фиг. 32 демонстрирует различие в изменении поглощения электромагнитной волны (света) до инициирования 511 активности мышечного сокращения и в течение 512 активности мышечного сокращения. До инициирования активности мышечного сокращения 511, между частью остатка лизина Lys185 и атомом кислорода в АТФ не образуется водородной связи, поэтому полоса поглощения, соответствующая этому, не возникает, и величина поглощения света на ее центральной длине волны мала. После этого, в течение 512 активности мышечного сокращения, реакция гидролиза АТФ происходит асинхронно, из-за чего величина поглощения электромагнитной волны значительно флуктуирует на протяжении времени обнаружения. Таким образом, в мышечной клетке существует очень большое количество миозинов, и временные режимы осуществления реакции гидролиза АТФ различаются между отдельными миозинами. В момент, когда многие миозины одновременно вызывают реакцию гидролиза АТФ, величина поглощения электромагнитной волны (света) возрастает, но, с другой стороны, в момент, когда лишь некоторые миозины вызывают реакцию гидролиза АТФ, величина поглощения электромагнитной волны (света) уменьшается. Соответственно, в настоящем примерном варианте осуществления, что касается характеристики сигнала обнаружения, показанного на фиг. 32, сократительная активность мышцы оценивается на основании значения амплитуды 513 изменения величины поглощения электромагнитной волны (света). Альтернативно, величину сократительной активности мышцы можно оценивать с использованием максимального значения изменение величины поглощения электромагнитной волны (света) в конкретное время.
В настоящем примерном варианте осуществления, "состояние сокращения мимических мышц человека" обнаруживается для измерения эмоциональной реакции испытуемого, как описано в разделе 6.5.4, в качестве способа измерения жизнедеятельности путем обнаружения "мышечной сократительной активности" в качестве субъекта обнаружения жизнедеятельности. В J.H. Warfel: The Extremities 6th edition (Lea & Febiger, 1993) описано соотношение между сокращением выразительной мышцы на лице и выражением, и выдержки оттуда показана на фиг. 33. Когда человек удивлен, надчерепная мышца 501 сокращается, и когда человек испытывает боль, корругатор 502 сокращается. Это соответствует явлениям, состоящим в подъеме бровей, когда человек удивлен, и сморщивании кожи лба, когда человек испытывает боль. Кроме того, щеки расширяются при улыбке, что указывает состояние, в котором скуловая мышца 503 сокращается при улыбке. С другой стороны, когда человек испытывает печаль, мышца 505, опускающая угол рта сокращается, в результате чего, рот напрягается, и наружная часть рта опускается. Между тем, когда человек хочет что-то сказать или выразить чувства, например, недовольство, человек иногда выпячивает губы. Когда человек хочет представить выражение лица, круговая мышца 504 рта сокращается. С другой стороны, когда человек невыразителен, мышце 506, опускающей нижнюю губу, свойственно сокращаться. Когда человек в чем-то не уверен и демонстрирует презрение, подбородочная мышца 507 сокращается, и центр рта опускается.
Соотношение между положением мимической мышцы, которая сокращается на лице, и выражением лица говорит о том, что «выражение той или иной эмоциональной реакции можно определить в зависимости от того, какая мимическая мышца сокращается». Настоящий примерный вариант осуществления отличается тем, что эмоциональная реакция или ощущение испытуемого измеряется в реальном времени для определения, какая мышца сокращается и насколько сильно она сокращается, с использованием этого явления. Известен традиционный метод, в котором ощущение испытуемого оценивается из геометрической информации, например, размещения, формы или зависящего от времени изменения составных частей (глаз и рта) лица. Однако этот способ сталкивается с проблемой, состоящей в том, что первоначальное строение лица испытуемого и лицевой угол в измерении значительно влияют на измерение, что снижает точность измерения и увеличивает время измерения. Напротив, в этом примерном варианте осуществления, поскольку эмоциональная реакция или ощущение измеряется согласно положению или силе сокращения мимической мышцы, измерение можно осуществлять мгновенно и высокой точностью. Кроме того, поскольку измерение производится бесконтактным способом, его преимущественно состоит в возможности осуществления, когда испытуемый находится в естественном состоянии, не утруждая его.
Кроме того, настоящий примерный вариант осуществления позволяет не только осуществлять измерение в бесконтактном режиме, но и предусматривает устройство, которое позволяет стабильно осуществлять измерение, даже если испытуемый свободно перемещается вокруг него. В случае, когда испытуемый перемещается свободно вокруг него в ходе измерения, позиция 522 субъекта обнаружения жизнедеятельности (то есть испытуемого) может перемещаться к углу обнаружимого диапазона 521 в секции обнаружения жизнедеятельности в ряде случаев, как показано, например, на фиг. 34. В таком случае, настоящий примерный вариант осуществления использует сигнал, полученный от секции 46 мониторинга позиции, в отношении точки обнаружения жизнедеятельности для обнаружения жизнедеятельности. Как ранее было описано в разделе 6.1.3,
- настоящий примерный вариант осуществления заметно отличается тем, что второе обнаружение осуществляется на основании первого обнаружения. Используемый здесь термин "первое обнаружение" указывает "обнаружение позиции точки обнаружения жизнедеятельности", определенное в разделе 6.1.3, и "секция 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности", показанная, например, на фиг. 16, осуществляет обнаружение. Кроме того, "второе обнаружение" указывает "обнаружение жизнедеятельности", и "секция обнаружения 47 жизнедеятельности", показанная, например, на фиг. 16, осуществляет обнаружение.
Между тем, настоящий примерный вариант осуществления также отличается тем, что для достижения признака, проверка операции (S101) секции 101 обнаружения жизнедеятельности и секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности осуществляется заранее, как показано на фиг. 35 или 36, и
- когда, по меньшей мере, одно из обнаружения позиции (первого обнаружения) точки обнаружения жизнедеятельности и обнаружения жизнедеятельности (второго обнаружения) неосуществимо (S102), осуществляется такой процесс, что сигнал обнаружения жизнедеятельности не выводится (S103).
Например, как показано на фиг. 34, если позиция 522 субъекта обнаружения жизнедеятельности (например, испытуемого) находится в обнаружимом диапазоне 521 в секции обнаружения жизнедеятельности, можно осуществлять обнаружение жизнедеятельности (второе обнаружение). Однако, если позиция 522 субъекта обнаружения жизнедеятельности (например, испытуемого) находится не обнаружимого диапазона 521 в секции обнаружения жизнедеятельности, обнаружение жизнедеятельности (второе обнаружение) нельзя осуществлять. Кроме того, обнаруживается отраженный свет, полученный путем освещения субъекта обнаружения жизнедеятельности (например, испытуемого) светом освещения для обнаружения жизнедеятельности, но если свет блокируется на части оптического пути, обнаружение жизнедеятельности (второе обнаружение) нельзя осуществлять. Аналогично, случай, когда обнаружение позиции секцией 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности, показанное на S102 фиг. 35 или 36, нельзя осуществлять, соответствует случаю, когда субъект обнаружения жизнедеятельности (например, испытуемый) перемещается вне диапазона, где обнаружение позиции секцией 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности осуществимо, или случаю, когда свет блокируется на части пути света обнаружения.
Кроме того, как описано выше, в случае, когда, по меньшей мере, одно из первого и второго обнаружений неосуществимо, может выводиться конкретное значение, например "О", например, как показано на S103 фиг. 35 или 36, вместо остановки вывода сигнала 106 обнаружения жизнедеятельности. Одновременно, пользователь может получать извещение о состоянии, когда обнаружение жизнедеятельности неосуществимо, посредством "экранного отображения" или "аудио" (S103).
С другой стороны, в разделе 6.1.3 описано, что позиция субъекта измерения в трех измерениях вычисляется путем обнаружения позиции точки обнаружения жизнедеятельности (первого обнаружения), и сигнал обнаружения (второго обнаружения) связанный с жизнедеятельностью, получается из вычисленной позиции в живом объекте. Это конкретное его содержание будет более подробно объяснено ниже. Выражение "на основании первого обнаружения" в вышеупомянутом признаке означает, что:
- позиция в направлении глубины точки 30 обнаружения жизнедеятельности обнаруживается на основании обнаружения позиции (первого обнаружения) точки обнаружения жизнедеятельности. Это соответствует этапу S104 на фиг. 35 или 36 (обнаружение секцией 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности). В качестве его конкретного способа используется принцип "тригонометрии", как описано в разделе 6.2.2 со ссылкой на фиг. 16. Затем, на основании "позиционной информации в направлении глубины точки 30 обнаружения жизнедеятельности", полученной в результате обнаружения на этапе S104 (соответствующей расстоянию 44 точек поверхности участка, где располагается секция обнаружения жизнедеятельности на фиг. 16), объектив 31 (фиг. 17 или 18) предусмотренный в секции 101 обнаружения жизнедеятельности, смещается в направлении оптической оси для перемещения в позицию, оптимальную для обнаружения жизнедеятельности. Это соответствует управлению работой секции 101 обнаружения жизнедеятельности, как описанному в S105. Между тем, объектив 42 камеры также предусмотрен в секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности, как показано на фиг. 16, и объектив 42 камеры оптимизирован в соответствии с позицией в направлении глубины точки 30 обнаружения жизнедеятельности, полученной на этапе S104. В результате, отчетливый шаблон формирования изображения поверхности 41 живого объекта получается на двухмерном фотодетекторе 43, предусмотренном в секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности. Таким образом, только после получения отчетливого шаблона формирования изображения в секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности, получается эффективный сигнал 106 обнаружения жизнедеятельности, специализированный на измерении жизнедеятельности (описанный ниже).
В объяснении со ссылкой на фиг. 3-3 описано, что "когда найдено положение мышцы, подлежащей сокращению, среди мимических мышц, нетрудно найти соответствующую эмоциональную реакцию». Таким образом, все сигналы обнаружения жизнедеятельности, указывающие величины мышечного сокращения по участку обнаружимого диапазона 521 в секции обнаружения жизнедеятельности, как показано на фиг. 34, не выводятся, но "положение мышцы, связанной с эмоциональной реакцией" (или выражением) выделяется из обнаружимого диапазона 521 в секции обнаружения жизнедеятельности, и только состояние сокращения мышцы выводится в качестве сигнала обнаружения жизнедеятельности. Это упрощает осуществление интерпретации с использованием сигнала 106 обнаружения жизнедеятельности (то есть измерение жизнедеятельность). Соответственно, настоящий примерный вариант осуществления заметно отличается тем, что:
- сигнал 106 обнаружения жизнедеятельности выводится на основании обнаружения позиции (первого обнаружения) точки обнаружения жизнедеятельности. Затем, если проверяется соотношение между позицией 522 субъекта обнаружения жизнедеятельности (позицией точки 30 обнаружения жизнедеятельности на фиг. 17, 18 или 20 относительно секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности, показанный на фиг. 16) и сигналом 106 обнаружения жизнедеятельности, легко определить, осуществляется ли этот признак. Таким образом, даже в случае, когда испытуемый, сохраняющий одно и то же ощущение (эмоцию) перемещается, если сигнал 106 обнаружения жизнедеятельности выводится непрерывно и стабильно, можно определить, что отслеживается позиция конкретной мышцы, и состояние сокращения мышцы выводится как сигнал 106 обнаружения жизнедеятельности, на основании обнаружения позиции (первого обнаружения) точки обнаружения жизнедеятельности (признак осуществляется). С другой стороны, в случае, когда свет блокируется на части пути света обнаружения секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности, и даже через некоторое время (с учетом процесса буферизации сигнала 106 обнаружения жизнедеятельности), надежный сигнал 106 обнаружения жизнедеятельности все еще выводится, оценивается, что признак не осуществляется.
До выделения "положения мышцы, связанной с эмоциональной реакцией (или выражением)" из обнаружимого диапазона 521 в секции обнаружения жизнедеятельности, необходимо выделить позицию 522 субъекта обнаружения жизнедеятельности в обнаружимом диапазоне 521 в секции обнаружения жизнедеятельности в секции 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности. Этот процесс выделение позиции использует, например, "метод распознавания лиц" и "метод выделения лицевого угла", применяемый в цифровых камерах и т.п. В этом методе распознавания лиц, позиции глаз, рта, носа и ушей, имеющих формы, характерные для человеческого лица, выделяются посредством согласования шаблонов для нахождения «места, где предполагается наличие лица». После нахождения, таким образом, "места, где предполагается наличие лица", в этом месте производится поиск позиций глаз, рта, носа и ушей, и оценивается лицевой угол.
Здесь, "позиции различных мимических мышц, связанных с эмоциональной реакцией (выражением)" можно получить из позиций глаз и рта, как показано на фиг. 33. Операция получения "позиций различных мимических мышц, связанных с эмоциональной реакцией (или выразительностью)" из шаблона формирования изображения в двух измерениях на двухмерном фотодетекторе 43 соответствует способу обнаружения позиции в двух измерениях в планарной ориентации точки 30 обнаружения жизнедеятельности секцией 46 мониторинга позиции в отношении точки обнаружения жизнедеятельности, на этапе 106, описанном на фиг. 35 или 36. При этом, этот раздел 11.5 поясняет обнаружение состояний сокращения различных мимических мышц в качестве примера обнаружения жизнедеятельности. Однако примерный вариант осуществления, показанный на фиг. 35 или 36, этим не ограничивается и применим к обнаружению или; измерению любых жизнедеятельностей, например, выделению места, где нейрон возбуждает потенциал действия, как описано в главе 4, выделению позиции активированной клетки на основании активности фосфорилирования, как будет описано ниже в главе 13, и пр.
Существует два способа в качестве способа направления результата обнаружения, полученного на этапе 106 на фиг. 35 или 36, в сигнал 106 обнаружения жизнедеятельности. Прежде всего, в настоящем примерном варианте осуществления, показанном на фиг. 35, положение обнаружения в секции 101 обнаружения жизнедеятельности управляется на основании результата обнаружения, полученного на этапе 106 (S107). На этом этапе, управление осуществляется для получения сигнала обнаружения жизнедеятельности только из "позиций различных мимических мышц, связанных с эмоциональной реакцией (выражением)" в обнаружимом диапазоне 521 в секции обнаружения жизнедеятельности. Таким образом, положения, соответствующие "позициям различных мимических мышц, связанных с эмоциональной реакцией (выражением)", полученным на этапе 106, устанавливаются как светопропускающие секции 56 в двухмерном жидкокристаллическом затворе на фиг. 18 и 19 (см. раздел 6.3.1).
В результате, в фотодетекторной ячейке 55 продольного одномерного выравнивания, показанной на фиг. 18, получается только сигнал 106 обнаружения жизнедеятельности, связанный с мышечным сокращением (реакцией гидролиза АТФ) соответствующей мимической мышцы. Затем полученный здесь сигнал обнаружения жизнедеятельности выводится, как есть (S108). В этом примерном варианте осуществления, поскольку способ выделения сигнала 106 обнаружения жизнедеятельности очень прост, преимущество состоит в возможности изготовления секции 101 обнаружения жизнедеятельности с низкими затратами и получения высокоточного сигнала обнаружения.
С другой стороны, в применяемом варианте осуществления, показанном на фиг. 36, жизнедеятельности обнаруживаются во всем диапазоне обнаружения (всех областях в обнаружимом диапазоне 521 в секции обнаружения жизнедеятельности, показанной на фиг. 34) в секции 101 обнаружения жизнедеятельности, как показано на S111. Кроме того, в этом случае, в качестве секции обнаружения жизнедеятельности используется способ, объясненный в разделе 6.3.2 со ссылкой на фиг. 20-22. В секции операции обработки сигнала внутренней части во внутренней части 86 схемы обнаружения жизнедеятельности, необходимый сигнал обнаружения выделяется из сигналов обнаружения жизнедеятельности, полученных на этапе S111, с использованием информации обнаружения на S106 (S112), и выводится как необходимый сигнал обнаружения жизнедеятельности (S113). В случае, когда применяется этот способ, информация сокращения других мимических мышц кроме "мимических мышц, связанных с эмоциональной реакцией (или выражением)", представленных на фиг. 33, также получается как сигнал обнаружения, что позволяет осуществлять усовершенствованную обработку сигнала с использованием этих сигналов обнаружения в секции операции обработки сигнала внутренней части. Соответственно, с использованием способа, показанного в этом применяемом варианте осуществления, можно более точно измерять жизнедеятельности.
Вышеописанный примерный вариант осуществления, в котором положение мимической мышцы, сокращающейся на лице, и величина ее сокращения обнаруживаются для измерения эмоциональной реакции (или эмоционального движения) испытуемого, можно применять для предотвращения депрессии, или ее раннего обнаружения или диагностики. Ниже поясняется этот применяемый вариант осуществления. Большинство людей не смеется, испытывая депрессию, и количество активных выражений имеет тенденцию к снижению. Соответственно, как описано выше со ссылкой на фиг. 33, когда даже физически непострадавший человек испытывает депрессию, оценивается, что количество сокращений скуловой мышцы 503 и круговой мышцы 504 рта уменьшается. Когда человек чувствует себя более подавленно или ощущает грусть, вызванную депрессией, считается, что частота незначительного сокращения мышцы 505, опускающей угол рта, возрастает. При дальнейшем развитии депрессии, человек смеется меньше и становится невыразительным. В этом случае, весьма вероятно, что скуловая мышца 503 и круговая мышца 504 рта расслабляются, в то время как мышца 506, опускающая нижнюю губу, остается напряженной. В связи с этим, путем обнаружения положения мимической мышцы для сокращения и величины сокращения, можно оценивать (измерять) глубину ощущения подавленности в этой точке. Кроме того, частота ощущения подавленности с течением времени (например, как долго продолжается ощущение подавленности или как часто возникает ощущение подавленности в день или неделю) или зависящее от времени изменение частоты возникновения ощущения подавленности (забывает ли человек ощущение и вскоре начинает чувствовать себя лучше, или прогрессирует ли подавленное состояние с течением времени) также будет составлять проблему. Таким образом,
1] если развитие депрессии испытуемого можно измерять в течение времени, раннее обнаружение или медицинское исследование депрессии будет полезно.
Помимо этого, использование этого применяемого варианта осуществления позволяет
2] предотвращать депрессию согласно ментальной наклонности испытуемого.
Таким образом, люди, склонные к сравнительно серьезным размышлениям, и трезвенники в большей степени подвержены депрессии. Соответственно, проводя мониторинг выражения лица и устанавливая ментальную наклонность испытуемого, можно принимать меры для предотвращения депрессии согласно ментальной наклонности испытуемого. Ниже объяснены конкретные способы. Как описано выше, обнаруживаются положение мимической мышцы, сокращающейся на лице, и величина ее сокращения, и глубина ощущения подавленности испытуемого (видимое развитие депрессии) в этой точке выражается значением. Затем, если измерение можно осуществлять непрерывно в течение времени посредством отделения 218 обнаружения жизнедеятельности, описанного в разделе 7.2.2.3, проверяется зависящее от времени изменение уровня ощущения подавленности, выраженного, таким образом, значением. Это позволяет легко определять, на каком уровне находится испытуемый, например, «здоров», «грустный», «необходимо предупреждение о ментальном здоровье», «кратковременная депрессия (= требуется непрерывное обследование)», «требуется лечение», или «очень серьезный», и своевременно обеспечивать лечение у психиатра.
Традиционно, предпринималась попытка использовать для диагностики депрессии анализ содержания кислорода в крови с помощью мозговой волны или света в ближнем инфракрасном диапазоне. Однако вышеупомянутый способ требует, чтобы измерительное устройство контактировало с пациентом, таким образом, создавая проблему в том, что на пациента ложится большая нагрузка, и непрерывное измерение в течение длительного периода затруднительно. Напротив, этот применяемый вариант осуществления предусматривает измерение полностью бесконтактным способом, что позволяет легко осуществлять непрерывное измерение в течение длительного периода, не создавая нагрузки для испытуемого.
Ниже описан способ профилактики и диагностики депрессии с использованием отделения 218 обнаружения жизнедеятельности, объясненного в главе 7.
<Способ, в котором отделение обнаружения жизнедеятельности обеспечено в кабинете психиатра>
Это способ использования отделения 218 обнаружения жизнедеятельности в качестве диагностического устройства и соответствует упакованному устройству. Когда- амбулаторный пациент садится перед этим устройством управления жизнедеятельностью, уровень развития депрессии последовательно возникает в форме численного значения. Используя это значение, психиатр может численно захватывать терапевтические эффекты.
<Способ, в котором отделение обнаружения жизнедеятельности обеспечивается вокруг тела пациента и зависящее от времени изменение ощущения пациента захватывается с течением времени>
Рассмотрим случай, когда отделение 218 обнаружения жизнедеятельности обеспечено на столе или рядом с телевизором или персональным компьютером. В этом применяемом варианте осуществления, отделение 218 обнаружения жизнедеятельности можно обеспечить испытуемому в бесконтактном режиме. Кроме того, в случае, когда используется способ, объясненный со ссылкой на фиг. 35 или 36, даже если испытуемый перемещается, движение можно отслеживать автоматически. Соответственно, это позволяет захватывать изменение ощущения пациента в течение продолжительного периода времени. Затем, сигнал 248 обнаружения жизнедеятельности или информация 249 жизнедеятельности, полученная отделением 218 обнаружения жизнедеятельности передается. психиатру или администратору компании по сети в реальном времени. Это позволяет психиатру или администратору компании осуществлять ранее превентивное лечение или раннее обнаружение депрессии.
Если такое раннее обнаружение депрессии обеспечивается на основании вышеупомянутого метода, соответствующее раннее лечение также осуществимо. Кроме того, применяемый вариант осуществления может способствовать этому лечению депрессии.
12] Способ управления жизнедеятельностью
Этот примерный вариант осуществления отличается тем, что:
[1] внутренние органы живого объекта освещаются электромагнитной волной снаружи;
[2] состояние живого объекта локально изменяется; и
[3] жизнедеятельность управляется в бесконтактном режиме.
Ниже описана конфигурация устройства управления жизнедеятельностью для осуществления управления, основной принцип, используемый для управления жизнедеятельностью, и пр.
12.1) Обзор основного способа управления жизнедеятельностью
Фиг. 37 демонстрирует пример устройства управления жизнедеятельностью, подлежащего использованию в настоящем примерном варианте осуществления. Устройство управления жизнедеятельностью, подлежащее использованию в настоящем примерном варианте осуществления, имеет следующие признаки:
- Электромагнитная волна, имеющая сравнительно высокую интенсивность, проецируется внутрь живого объекта снаружи для использования в качестве света управления;
- Электромагнитная волна, имеющая длину волны не менее 0,84 мкм, но не более 2,5 мкм, используется в качестве света управления;
- Свет управления концентрируется в конкретном положении в живом объекте;
- Управление жизнедеятельностью и обнаружение жизнедеятельности могут осуществляться параллельно
- управление осуществляется после обнаружения активного состояния в положении управления в живом объекте, или управление осуществляется во время осуществления обнаружения; и
- можно подавать извне конкретное напряжение одновременно с облучением светом управления.
В способе измерения жизнедеятельности в настоящем примерном варианте осуществления, прежде всего, необходимо установить положение объекта управления в живом объекте. Часть 600 организма, подлежащая обнаружению/управлению, которая рассматривается как объект управления, в целях удобства, представлена на фиг. 37 как голова испытуемого, и настоящий примерный вариант осуществления рассматривает, в качестве примера, управление потенциалом действия в нейроне. Однако настоящий примерный вариант осуществления не ограничивается этим, и любое положение в живом объекте, включая кисть руки, стопу и торс, можно рассматривать как часть 600 организма, подлежащую обнаружению/управлению, и организмом здесь могут быть, помимо животных, растения, бактерии и микроорганизмы.
Это устройство управления жизнедеятельностью снабжено секцией 432 мониторинга для обнаружения позиции точки обнаружения жизнедеятельности для мониторинга положения части 600 организма, подлежащей обнаружению/управлению. Эта секция 432 мониторинга для обнаружения позиции точки обнаружения жизнедеятельности осуществляет мониторинг согласно способу, объясненному в разделе 6.2 со ссылкой на фиг. 14 и 16. Кроме того, в случае, когда испытуемым является животное, оно может немного двигаться в ходе обнаружения или управления. В случае такого незначительного движения, объектив 31 перемещается в трех осевых направлениях, следуя за точкой 30 обнаружения жизнедеятельности.
В частности, когда часть 600 организма, подлежащая обнаружению/управлению, перемещается после того, как секция 432 мониторинга для обнаружения позиции точки обнаружения жизнедеятельности первоначально устанавливает позицию точки 30 обнаружения жизнедеятельности, секция 432 мониторинга для обнаружения позиции точки обнаружения жизнедеятельности автоматически обнаруживает величину его смещения, и объектив 31 перемещается под действием схемы управления 605 объективом согласно обнаруженной таким образом величине смещения, таким образом, механически корректируя величину смещения. В примерном варианте осуществления, показанном на фиг. 37, источник 431 света для обнаружения позиции точки обнаружения жизнедеятельности обеспечен как деталь, отдельная от источника света для света (электромагнитной волны), подлежащего использованию для обнаружения или управления жизнедеятельностью, и проецирует свет в положение, совпадающее с точкой 30 обнаружения жизнедеятельности, где осуществляется обнаружение или управление жизнедеятельностью, или в ее окрестность (немного более широкую область, включающую в себя точку 30 обнаружения жизнедеятельности). Альтернативно, обнаружение позиции точки обнаружения жизнедеятельности может осуществляться с использованием того же источника света, который используется для обнаружения или управления жизнедеятельностью.
Электромагнитная волна (свет) 608 для обнаружения/управления жизнедеятельностью, излучаемая из светоизлучающего компонента 111, преобразуется в параллельный световой пучок коллимационной линзой 606, и затем концентрируется объективом 31 в точке 30 обнаружения жизнедеятельности в части 600 организма, подлежащей обнаружению/управлению. Такая концентрация электромагнитной волны (света) 608 для обнаружения/управления жизнедеятельностью, дает следующие эффекты: (1) можно управлять жизнедеятельностью только в локальном конкретном положении в живом объекте; и (2) можно эффективно использовать энергию электромагнитной волны (света) 608 для обнаружения/управления жизнедеятельностью.
Фиг. 37 демонстрирует конфигурацию, имеющую только один светоизлучающий компонент 111, но, альтернативно, можно обеспечить множество светоизлучающих компонентов 111. Если электромагнитная волна (свет) 608 для обнаружения/управления жизнедеятельностью, излучаемая из множества излучающих компонентов 111, проходит через один и тот же объектив 31, свет может одновременно концентрироваться на множестве пятен в части 600 организма, подлежащей обнаружению/управлению, что позволяет одновременно управлять жизнедеятельностями во множестве разных точек 30 обнаружения жизнедеятельности. Кроме того, благодаря независимому управлению соответствующими световыми излучениями из множества светоизлучающих компонентов 111, соответствующие временные режимы управления жизнедеятельностью во множестве разных точек 30 обнаружения жизнедеятельности могут независимо изменяться.
Кроме того, в устройстве управления жизнедеятельностью, показанном на фиг. 37, обеспечена секция 101 обнаружения жизнедеятельности, и обнаружение жизнедеятельности можно осуществлять параллельно с управлением жизнедеятельностью. Это дает следующие эффекты настоящего примерного варианта осуществления: (1) управление жизнедеятельностью можно осуществлять после проверки необходимости управления в точке 30 обнаружения жизнедеятельности путем обнаружения ее состояния жизнедеятельности, благодаря чему, эффективность управления жизнедеятельностью возрастает; и (2) обнаружение жизнедеятельности можно осуществлять одновременно с управлением жизнедеятельностью, что позволяет проверять эффекты управления жизнедеятельностью в реальном времени и повышать эффективность управления жизнедеятельностью. Заметим, что секция 101 обнаружения жизнедеятельности на фиг. 37 использует принцип, объясненный в разделе 6.3 со ссылкой на фиг. 17-22, и имеет объясненную конфигурацию.
При этом, в устройстве управления жизнедеятельностью, показанном на фиг. 37, единичный источник света (светоизлучающая секция 111) используется для обнаружения и управления жизнедеятельностью. Это дает следующие эффекты: (1) можно уменьшить количество необходимых компонентов, что позволяет добиться уменьшения размеров и снижение стоимости устройства управления жизнедеятельностью; и (2) не требуется выравнивать оптические системы (выполнять оптическую юстировку) по отдельности для обнаружения и управления жизнедеятельностью и упрощается сборка устройства управления жизнедеятельностью, что позволяет добиться снижения стоимости и повышения надежности устройства управления жизнедеятельностью. В случае этого способа, количество света электромагнитной волны (света), излучаемой из светоизлучающего компонента 111, изменяется с течением времени, для переключения между обнаружением и управлением жизнедеятельностью с течением времени. Таким образом, количество света электромагнитной волны (света), излучаемой из светоизлучающего компонента 111, снижается во время обнаружения жизнедеятельности, и при этом, количество света электромагнитной волны (света), излучаемой из светоизлучающего компонента 111 увеличивается во время управления жизнедеятельностью, осуществляемого с перерывами. При этом величина излучения света изменяется под управлением генератора 118 сигнала модуляции на основании команды от секции 603 управления. Затем блок 114 управления светоизлучающего компонента изменяет силу тока, подаваемого на светоизлучающий компонент 111, в соответствии с выходным сигналом от этого генератора 118 сигнала модуляции.
Альтернативно, для обнаружения и управления жизнедеятельностью можно обеспечить разные источники света. В этом случае, преимущество состоит в том, что (1) управление и обнаружение жизнедеятельности можно осуществлять в один и тот же промежуток времени, что дополнительно повышает точность обнаружения жизнедеятельности и эффективность управления жизнедеятельностью. Как показано на фиг. 28, надлежащие длины волны для обнаружения и управления жизнедеятельностью, в общем случае, делятся во множество областей (диапазонов). Соответственно, в случае, когда для обнаружения и управления жизнедеятельностью используются разные источники света, желательно выбирать источники света для излучения соответствующих электромагнитных волн (света), длины волны которых включены во взаимно различные диапазоны длин волны (области).
Кроме того, устройство управления жизнедеятельностью, показанное на фиг. 37, отличается тем, что облучение точки 30 обнаружения жизнедеятельности электромагнитной волной (светом) 608 для обнаружения/управления жизнедеятельностью и подачу конкретного напряжения извне можно осуществлять одновременно. Когда подача конкретного напряжения осуществляется одновременно таким образом, управление жизнедеятельностью можно осуществлять более эффективно. Здесь, секция 603 управления осуществляет синхронное управление временным режимом для повышения интенсивности светового излучения светоизлучающего компонента 111 и временным режимом подачи конкретного напряжения во время управления жизнедеятельностью. Таким образом, когда сигнал команды выводится из секции 603 управления, генератор 604 сигнала модуляции использует источник 602 питания для генерации высокого напряжения и высокой частоты для временной генерации высокого напряжения. Это высокое напряжение подается на электродные контакты (пластины) 601-1, и 601-2, благодаря чему, между электродным контактом (пластиной) 601-1 и электродным контактом (пластиной) 601-2 образуется сильное электрическое поле. Эффект этого сильного электрического поля, возникающего между электродным контактом (пластиной) 601-1 и электродным контактом (пластиной) 601-2, аналогичен эффекту AED (автоматического внешнего дефибриллятора), используемого для восстановления работы сердца.
При этом размещение двух электродных контактов (пластин) 601-1 и 601-2 является фиксированным в устройстве управления жизнедеятельностью, показанном на фиг. 37, и часть 600 организма, подлежащая обнаружению/управлению (голова и т.п. испытуемого) должна быть помещена между ними. Однако размещение этим не ограничивается, и электродный контакт (пластина) 601-1 и электродный контакт (пластина) 601-2 можно непосредственно присоединять (или временно прилеплять) к поверхности части 600 организма, подлежащей обнаружению/управлению (головы и т.п испытуемого).
Кроме того, фиг. 38 демонстрирует применяемый вариант осуществления устройства управления жизнедеятельностью, показанного на фиг. 37. Фиг. 38 отличается тем, что электромагнитная волна 608 для обнаружения/управления жизнедеятельностью поступает в оптический волновод 609, благодаря чему, внутренние органы живого объекта освещаются электромагнитной волной 608 для обнаружения/управления жизнедеятельностью наподобие эндоскопа и катетера. Кроме того, в этом случае, сигнал, полученный от секции 432 мониторинга для обнаружения позиции точки обнаружения жизнедеятельности, передается на схему 610 управления оптическим волноводом для регулировки позиции объектива 31, предусмотренного на конце оптического волновода 609. Как показано на фиг. 38, при использовании оптического волновода 609, управление жизнедеятельностью можно осуществлять даже в глубинном положении в организме, где находится объект обнаружения/управления, путем освещения положения электромагнитной волной 608 для обнаружения/управления жизнедеятельностью/ таким образом, значительно расширяя управляемый диапазон.
Кроме того, настоящий примерный вариант осуществления не ограничивается данной конфигурацией, и блок 114 управления светоизлучающего компонента, светоизлучающий компонент 111 и секция 101 обнаружения жизнедеятельности могут быть заключены в одну небольшую капсулу. В этом случае, капсула вводится в тело таким образом, что испытуемый, например, уменьшает глубину капсулы, и позиция капсулы управляется извне посредством беспроводной связи с секцией управления, предусмотренной вне тела. В применяемом варианте осуществления на фиг. 38, испытуемый подвергается нагрузке во время ввода оптического волновода 609 в тело. Напротив, при использовании капсулы, можно не только значительно снизить нагрузку на испытуемого, но и непрерывно проецировать электромагнитную волну 608 для обнаружения/управления жизнедеятельностью в течение долгого времени, что позволяет значительно повысить эффективность управления жизнедеятельностью (например, эффективность лечения).
12.3) Молекулярная структура ионного канала и способ управления воротным механизмом
Говорят, что в теле 1 нервной клетки существуют потенциалозависимые Na+ ионные каналы, и многие из них распределены, в частности, вблизи корня аксона 2 в теле 1 нервной клетки. В В. Hille: Ion Channels of Excitable Membranes 3rd Edition (Sinauer Associates, Inc., 2001) p. 110, Plate 7, описана модель потенциалозависимого ионного канала, и упрощенная структура выдержки модели показана на фиг. 39 (а). Здесь, "крышка (ворота)" и "положительно заряженная часть" потенциалозависимого Na+" ионного канала 11 соответствуют воротам 615 и заряженной части 616 на фиг. 39 (а), соответственно.
При этом, как показано на фиг. 39(а), ионный канал внедрен в клеточную мембрану 613, которая разделяет внутренний слой 612, обращенный к цитоплазме в нейроне, и наружный слой 611 клеточной мембраны, расположенный вне нейрона. Этот ионный канал образован белком, состоящим из аминокислот, соединенных друг с другом. Как показано на фиг. 39(b), в белке, атомная конфигурация, образованная двумя атомами углерод С и одним атомом азота, повторяется, формируя главную цепь 623 аминокислоты. В частности, часть 621 водородной связи формируется между атомом кислорода, соединенным двойной связью с атомом углерода С на одной главной цепи 623 аминокислоты, и атомом водорода, ковалентно связанным с атомом азота на соседней главной цепи 623 аминокислоты, в результате чего, часть белка имеет α-спиральную структуру, в которой главная цепь 623 аминокислоты имеет спиральную третичную структуру.
Здесь, остаток аминокислоты обозначен "R" на фиг. 39 (b). На фиг. 39(а), (с) и (d), часть в белке, которая имеет эту α-спиральную структуру, изображена в форме «цилиндра», и соответствующие цилиндрические части обозначены α, β, γ и δ. Между тем, сама по себе прочность связи одной части 621 водородной связи не особо велика, но в α-спиральной структуре существует много частей 621 водородной связи, благодаря чему, общая прочность связи становится большой. Соответственно, цилиндрическая часть, имеющая α-спиральную структуру, обладает очень высокой механической прочностью (к напряжению изгиба).
Как показано на фиг. 39(а), концы цилиндрических частей α и β сомкнуты в течение периода покоя, в результате чего, ворота 615 закрыты. Даже в течение этого периода покоя, ионы, имеющие положительный электрический заряд, проникают во внутренний слой 612, обращенный к цитоплазме, поскольку [1] наружный слой 611 клеточной мембраны имеет гораздо более высокую концентрацию ионов, чем внутренний слой 612, обращенный к цитоплазме, и [2] в клеточной мембране 613 возникает градиент потенциала (стрелка в виде волнистой линии). Однако механические прочности цилиндрических частей α и β противодействуют силам ввода положительных ионов. Кроме того, внутри каждой из цилиндрических частей γ и δ, соответственно, присоединенных к цилиндрическим частям α и β, остаток, имеющий "положительный электрический заряд" связывается с остатком 622 аминокислоты, таким образом, формируя заряженную часть 616. Этот остаток, имеющий положительный электрический заряд, предположительно является остатком лизина или остатком аргинина. Поскольку количество положительных электрических зарядов в остатке гистидина очень мало в водной среде (рН около 7) в живом объекте, маловероятно, что остаток гистидина способствует этому.
Кроме того, в течение периода покоя, под действием электростатической силы со стороны электрического поля, обусловленного градиентом потенциала, указанным стрелкой в виде волнистой линии в клеточной мембране 613, эта заряженная часть 616 перемещается в положение, ближайшее к внутреннему слою 612, обращенному к цитоплазме. Движение заряженной части 616 приводит к скручиванию цилиндрических частей γ и δ, из-за чего, пространство трещины 614 расширяется. Считается, что расширяющая сила этой трещины 614 достигает цилиндрических частей α и β и действует как сила, закрывающая ворота 615. Здесь, состояние, в котором положительные электрические заряды собираются на поверхности наружного слоя 611 клеточной мембраны 613, и отрицательные электрические заряды собираются на внутреннем слое 612, обращенном к цитоплазме, создавая, таким образом, градиент потенциала, именуется «поляризованным состоянием».
С другой стороны, при образовании деполяризованного состояния, показанного на фиг. 39(с), и уменьшении градиента потенциала, сила, приближающая заряженную часть 616 к внутреннему слою 612, обращенному к цитоплазме, за счет электростатической силы, ослабевает. Это приводит к ослаблению силы скручивания цилиндрических частей γ и δ, благодаря чему, заряженная часть 616 возвращается в нормальную позицию, и пространство в трещине 614 сокращается. Соответственно, цилиндрические части α и β открывают ворота 615 совместно друг с другом. Когда ворота 615 открыты, ионы Na+ перетекают во внутренний слой 612, обращенный к цитоплазме, из наружного слоя 611 клеточной мембраны, и происходит "нейронный потенциал действия" или "распространение импульса по аксонному волокну". Этому имеется традиционно известное объяснение.
В связи с этим, этот примерный вариант осуществления отличается тем, что в течение периода покоя, «этот ионный канал освещается электромагнитными волнами (светом), включающими в себя электромагнитную волну (свет), имеющую конкретную длину волны, в связи с чем, механические прочности цилиндрических частей α и β изменяются для управления открытием и закрытием ворот 615». Настоящий примерный вариант осуществления имеет следующие эффекты: [1] благодаря дешевизне устройства управления жизнедеятельностью, любой может легко осуществлять обнаружение/измерение и управление жизнедеятельностью; [2] благодаря высокому пространственному разрешению, маловероятно возникновение негативных эффектов в местах, отличных от целевой части подлежащих управлению; и [3] благодаря избирательности по длине волны, маловероятно возникновение негативных эффектов в других жизнедеятельностях.
Как описано выше, механические прочности цилиндрических частей α и β, которые необходимы для уверенного осуществления открытия и закрытия ворот 615, поддерживаются за счет прочности связи водородной связи, показанной на фиг. 39(b). Настоящий примерный вариант осуществления отличается проецированием электромагнитной волны (света), возбуждающей колебательную моду, возникающую в этой водородной связи C=O…H-N. Вследствие очень высокой колебательной энергии возбужденного состояния, в части 621 водородной связи, находящейся в возбужденном состоянии, [1] прочность водородной связи значительно ослабевает, или [2] имеет место явление разрушения водородной связи. В результате, механические прочности цилиндрических частей α и β значительно снижаются, и силе, направляющей положительные ионы во внутренний слой 612, обращенный к цитоплазме, не удается противодействовать, в результате чего, ворота 615 открываются, как показано на фиг. 39(d).
До сих пор был объяснен способ, в котором нейронный потенциал действия ускоряется только за счет освещения электромагнитным полем (светом) без участия внешнего электрического поля. В качестве другого применяемого варианта осуществления, нейронным потенциалом действия и распространением импульса по аксонному волокну можно хорошо управлять с более высокой точностью, поддерживая приложение внешнего электрического поля, подлежащего использованию совместно с освещением электромагнитным полем (светом). Таким образом, ворота 615 ионного канала закрыты в поляризованном состоянии, показанном на фиг. 39 (а), тогда как ворота 615 ионного канала открыты в деполяризованном состоянии, показанном на фиг. 39 (с). В связи с этим, конкретный ионный канал устанавливается в промежуточном состоянии между поляризацией и деполяризацией (напряженность поля, создаваемая непосредственно до открытия ворот 615) путем приложения к нему сильного электрического поля извне. Соответственно, в ионном канале, находящемся в этом промежуточном состоянии, его ворота 615 открываются вследствие незначительных изменений механических прочностей (снижения прочности) цилиндрических частей α и β.
Способ приложения сильного электрического поля извне состоит в том, что высокое напряжение временно создается между электродными контактами (пластинами) 601-1 и 601-2 с использованием источника 602 питания для генерации высокого напряжения и высокой частоты в устройстве управления жизнедеятельностью, показанном на фиг. 37. Поскольку количество света проецируемого электромагнитного поля (света), можно значительно снизить, поддерживая приложение внешнего электрического поля, можно не только дополнительно сократить возникновение побочных эффектов, обусловленных управлением жизнедеятельности, но и снизить опасность разрушения ионных каналов вследствие освещения сильным электромагнитным полем (светом). Это дает такой эффект, что поддержка приложения внешнего электрического поля может значительно повысить безопасность в течение управления жизнедеятельностью.
12.4) Характеристика управления жизнедеятельностью
Ниже будет объяснена длина волны, подходящая для электромагнитного поля (света), проецируемого для управления нейронного потенциала действия путем открытия и закрытия ворот 615 ионного канала или управления распространения импульса по аксонному волокну. Как описано в разделе 12.3, в этом случае необходимо возбуждать колебательную моду в водородной связи С=O…H-N. Возбуждение колебательной моды этого типа имеет признак, сравнительно близкий к строке "колебания части водородной связи вторичного амида -CONH-" в таблице 7. Таким образом, как показано в разделе 4.7 или 11.4, когда диапазон изменения с учетом различия в значении обнаружения, обусловленного ошибками измерения или условиями измерения, оценивается равным ±15%, диапазоны изменения таковы:
1,53×(1-0,15)=1,30, 1,67×(1+0,15)=1,92, и
1,04×(1-0,15)=0,88, 1,12×(1+0,15)=1,29.
Соответственно, при подытоживании этих значений, можно получить следующие диапазоны:
- диапазон длин волны полосы поглощения, соответствующей 1-му обертону, составляет от 1,30 мкм до 1,92 мкм; и
- диапазон длин волны полосы поглощения, соответствующей 2-му обертону, составляет от 0,88 мкм до 1,29 мкм.
В отношении полученных таким образом диапазонов, оставшиеся диапазоны, полученные исключением диапазонов длин волны, где присутствует сильное поглощение молекулой воды, показанных на фиг. 28 таковы:
- диапазон длин волны полосы поглощения, соответствующей 2-му обертону, составляет от 0,88 мкм до 0,94 мкм и от 1,03 мкм до 1,29 мкм,
- диапазон длин волны полосы поглощения, соответствующей 1-му обертону, составляет от 1,52 мкм до 1,89 мкм, как показано на фиг. 28.
Однако диапазоны до конца демонстрируют только диапазон обнаружения n-го обертона. Полоса поглощения, соответствующая комбинациям, также включена в ближний инфракрасный диапазон. В связи с этим, когда диапазон длин волны для обнаружения комбинаций также принимается во внимание, первый, второй, третий, четвертый и пятый диапазоны длин волны с I по V с меньшим поглощением водой, показанные на фиг. 28, можно рассматривать как целевые диапазоны. Альтернативно, если величина поглощения в полосе поглощения для комбинаций велика и не подвергается сильному влиянию поглощения водой, желательный диапазон длин волны будет в пределах от 0,84 мкм (или 0,875 мкм) до 2,50 мкм, как показано в разделе 4.7.
В качестве конкретного примера, для управления жизнедеятельностью путем снижения механической прочности α-спирали, в разделе 12.3 описано управление воротным механизмом в ионном канале. Альтернативно, жизнедеятельностью можно управлять путем снижения механическая прочность других α-спиралей, в качестве другого примерного варианта осуществления. Например, как описано в разделе 11.1, миозин включается в скелетную мышцу. α-спираль включается в третичную структуру этого миозина для обеспечения механической прочности во время сокращения скелетной мышцы. В связи с этим, при сокращении скелетной мышцы, скелетную мышцу можно освещать светом, имеющим длину волны в вышеуказанном диапазоне для снижения механической прочности α-спирали, благодаря чему, сократительная сила мышцы ослабевает.
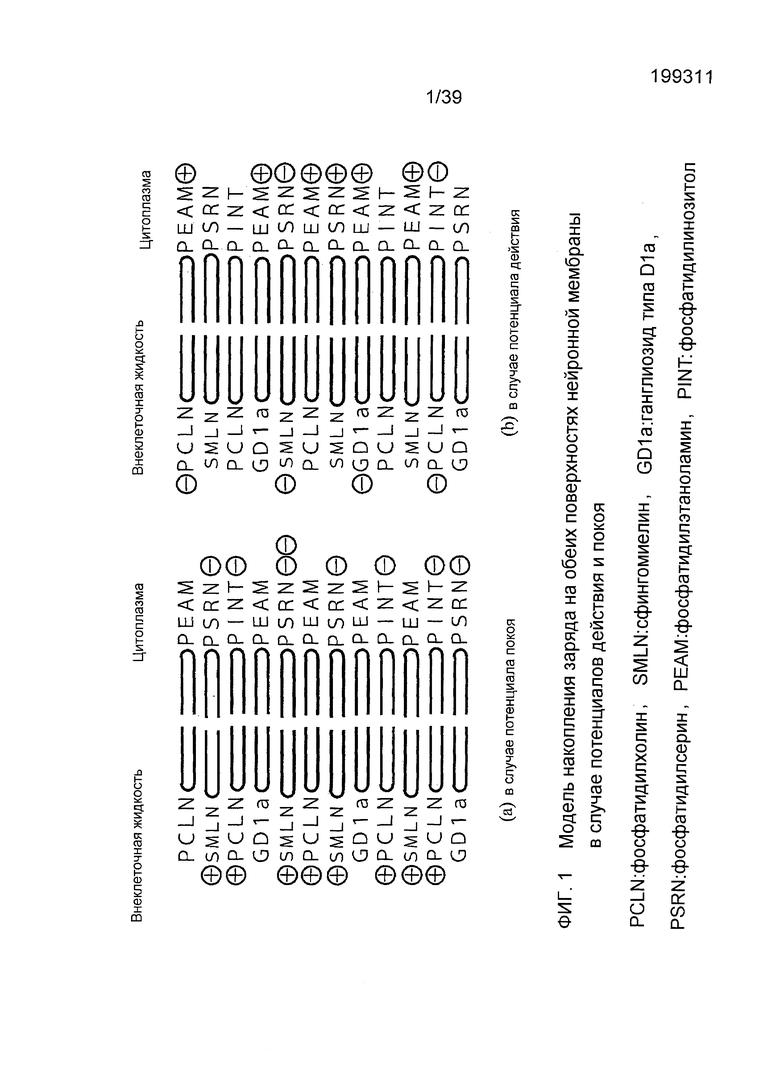
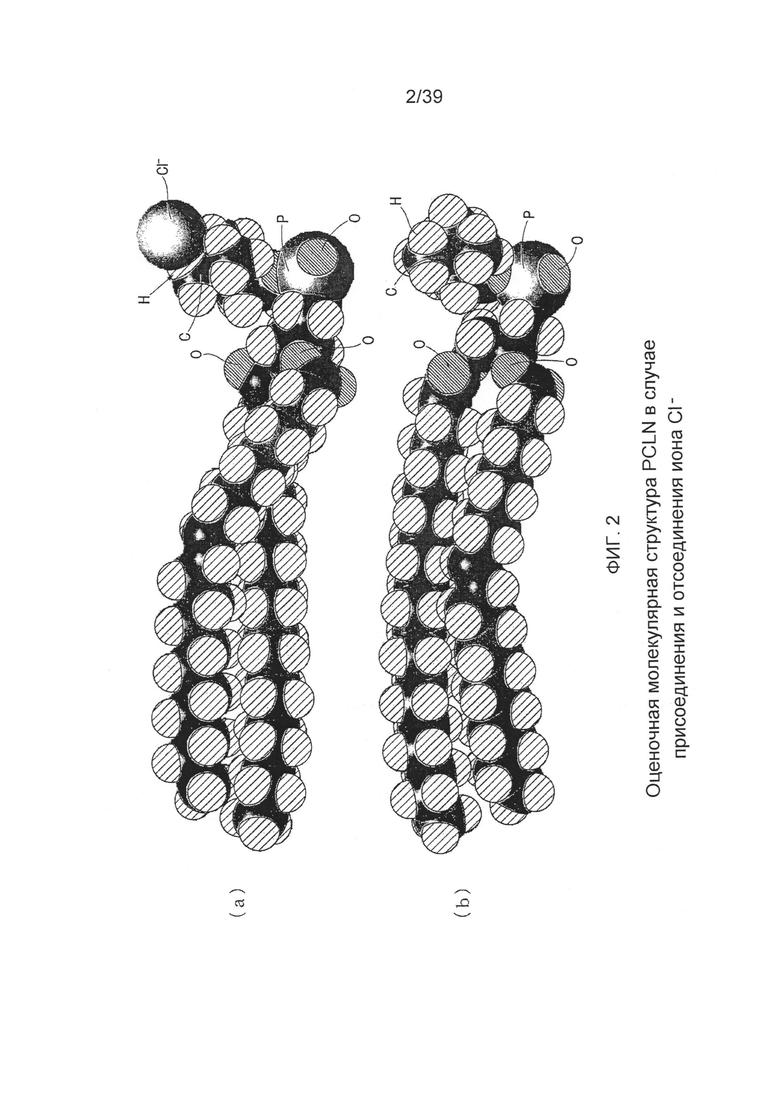
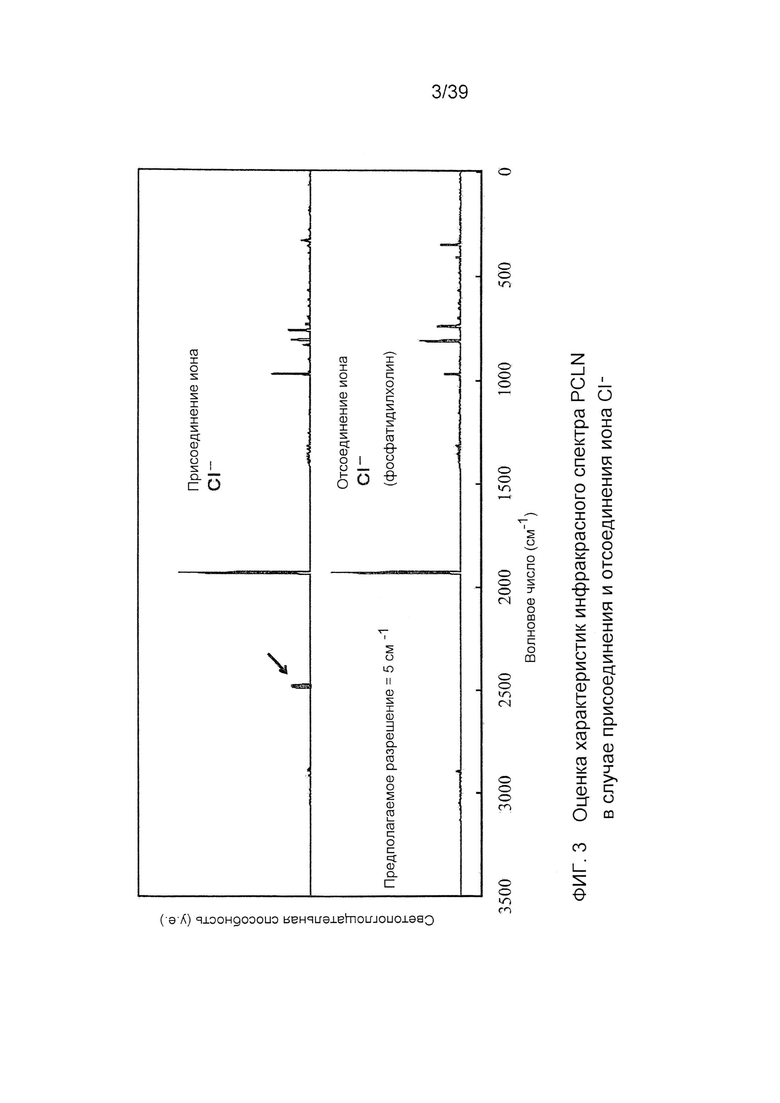

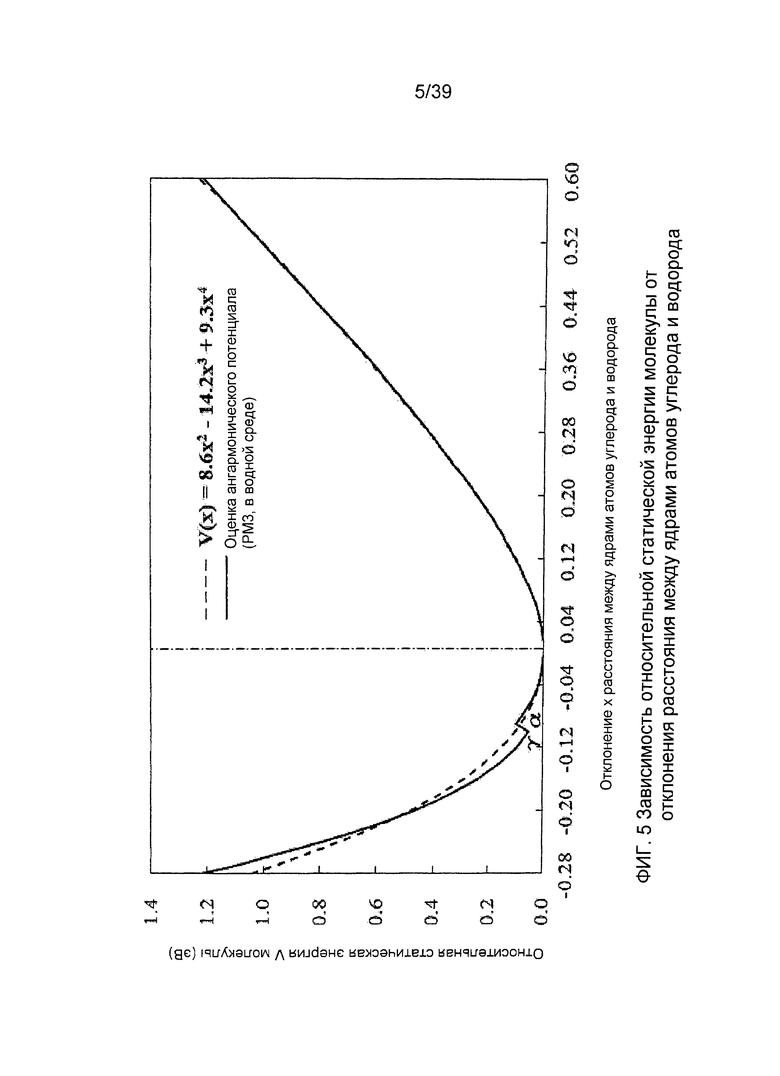

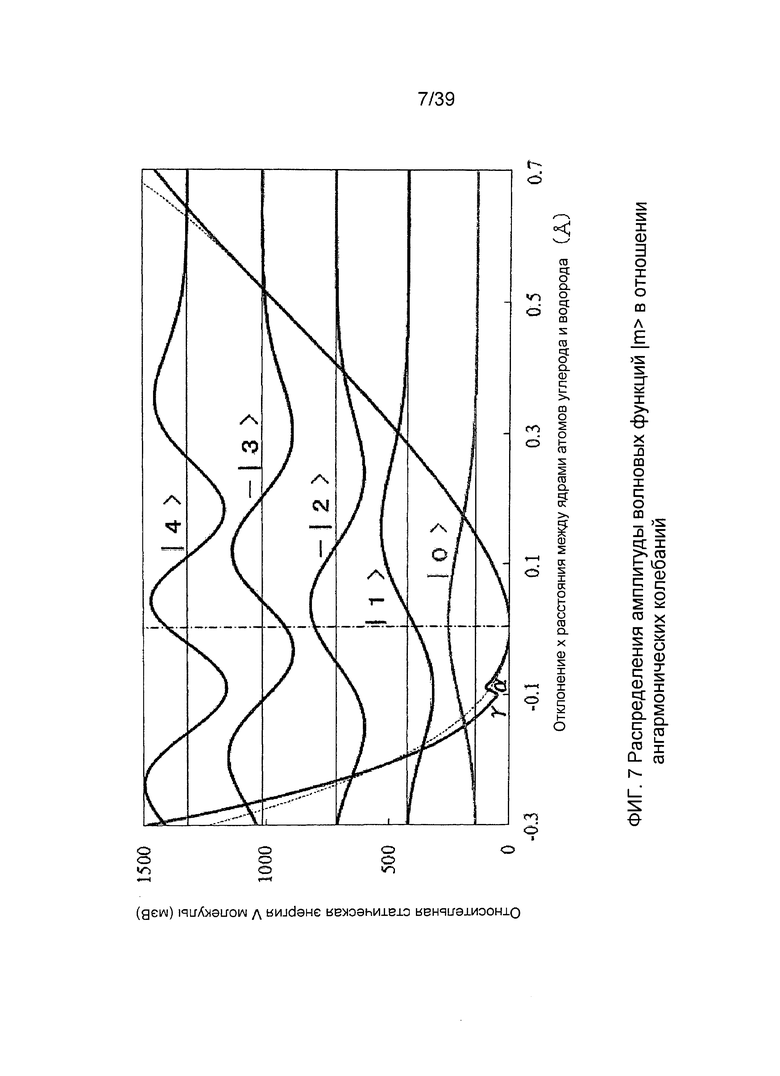
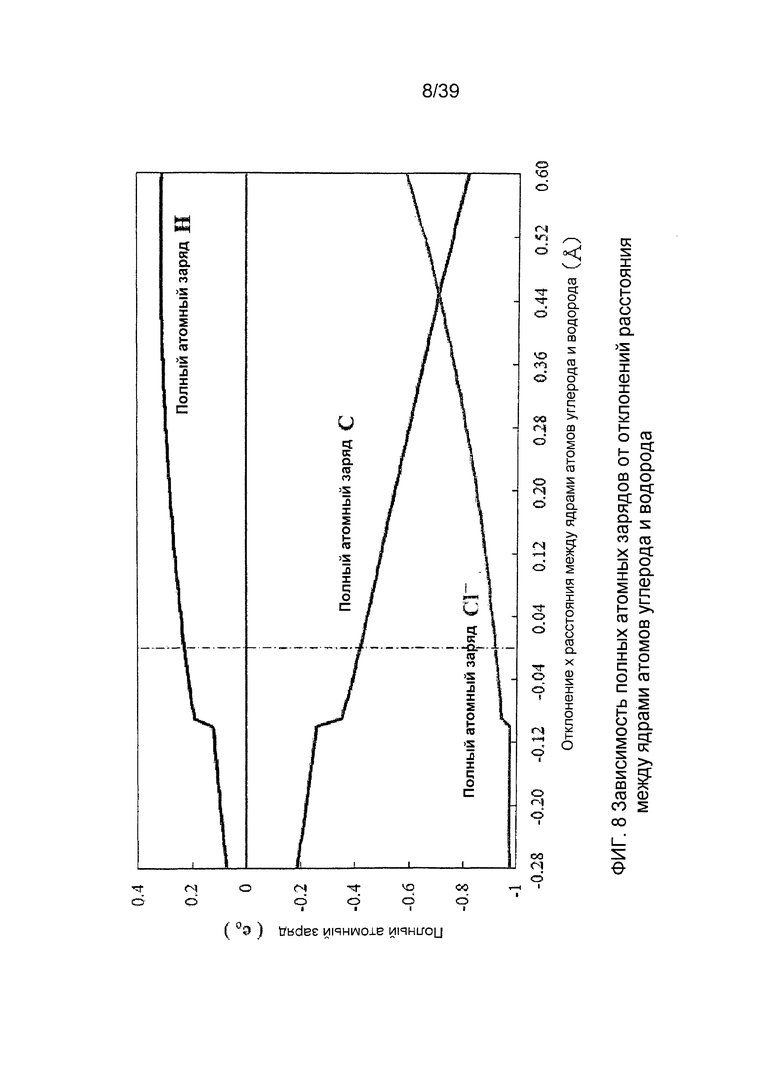
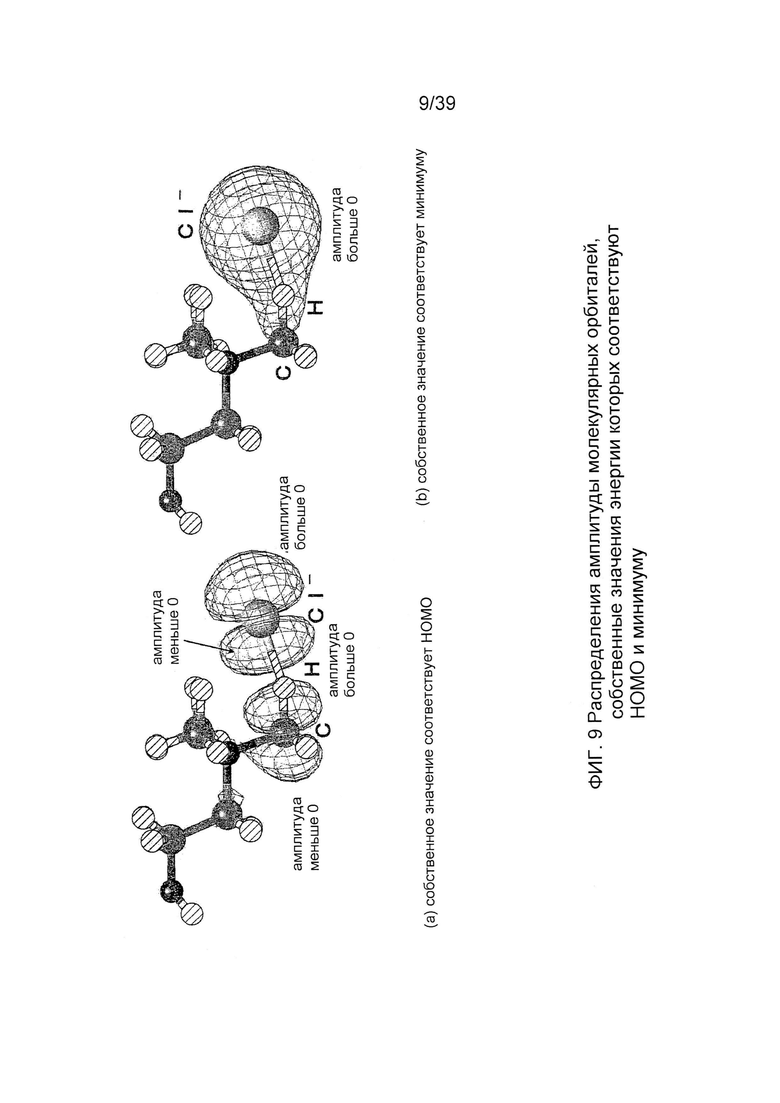

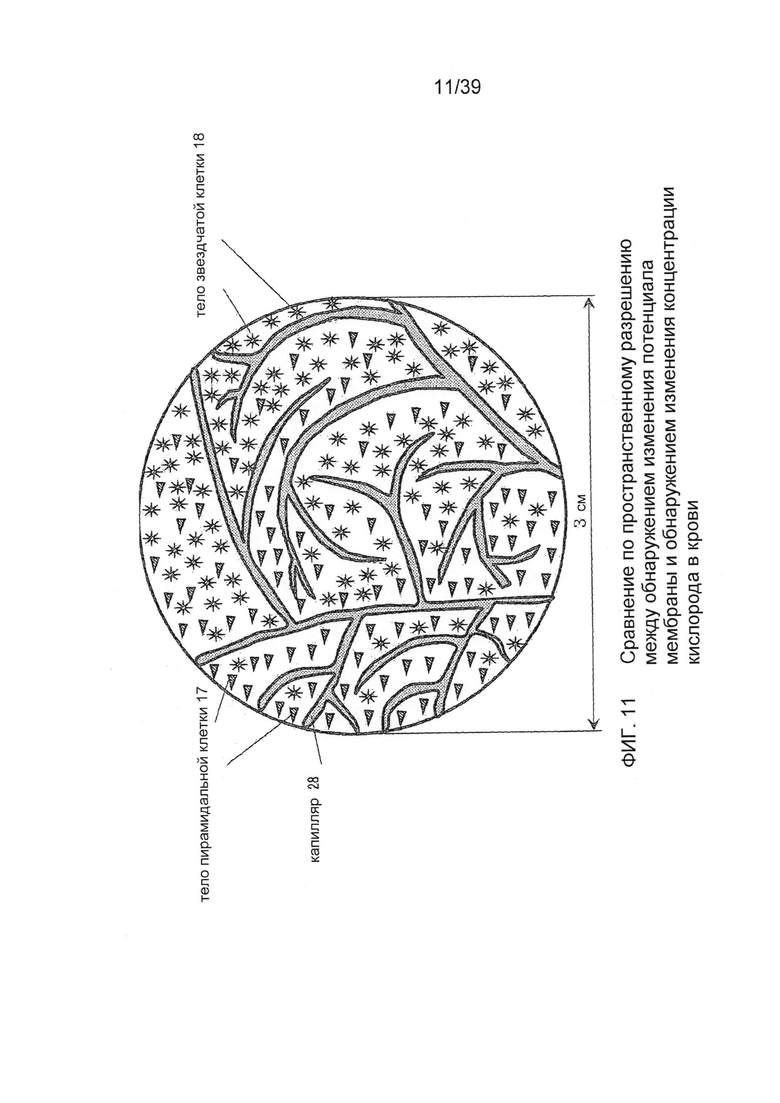
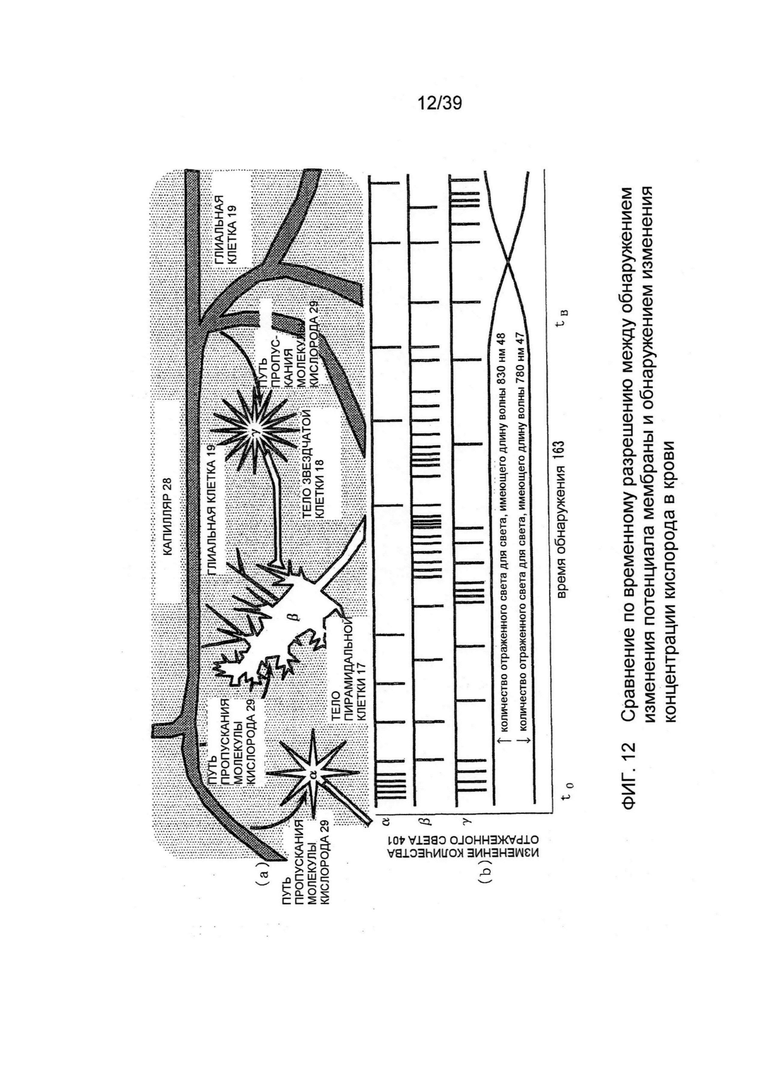


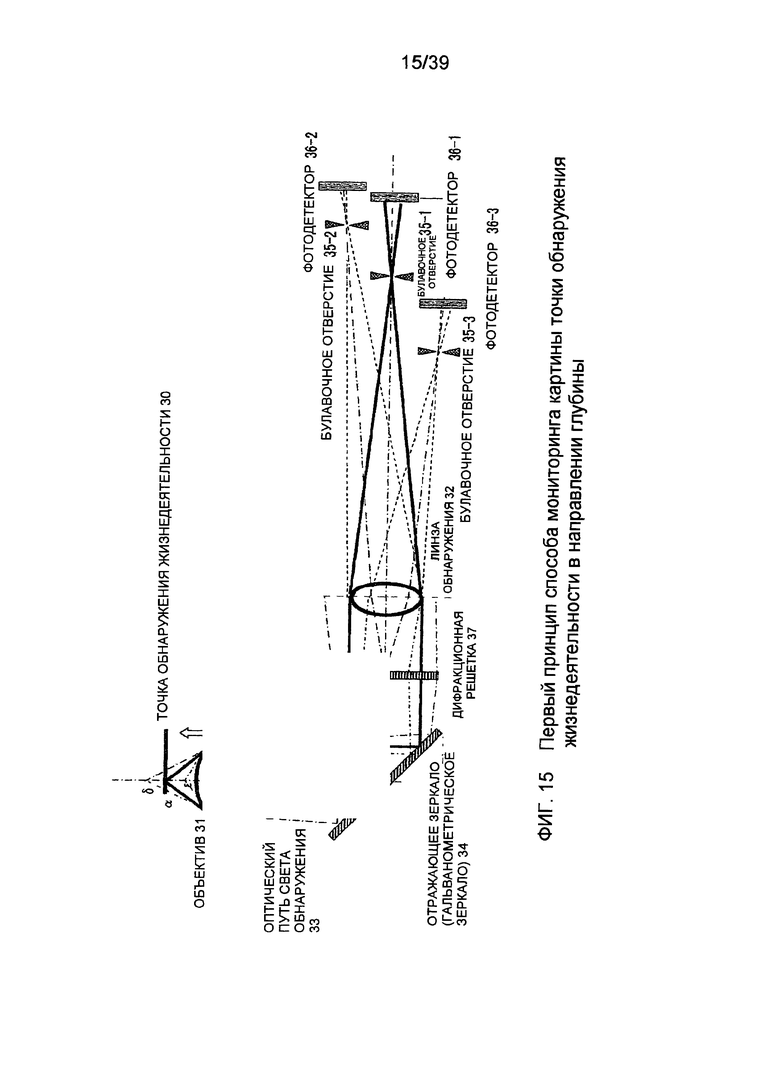
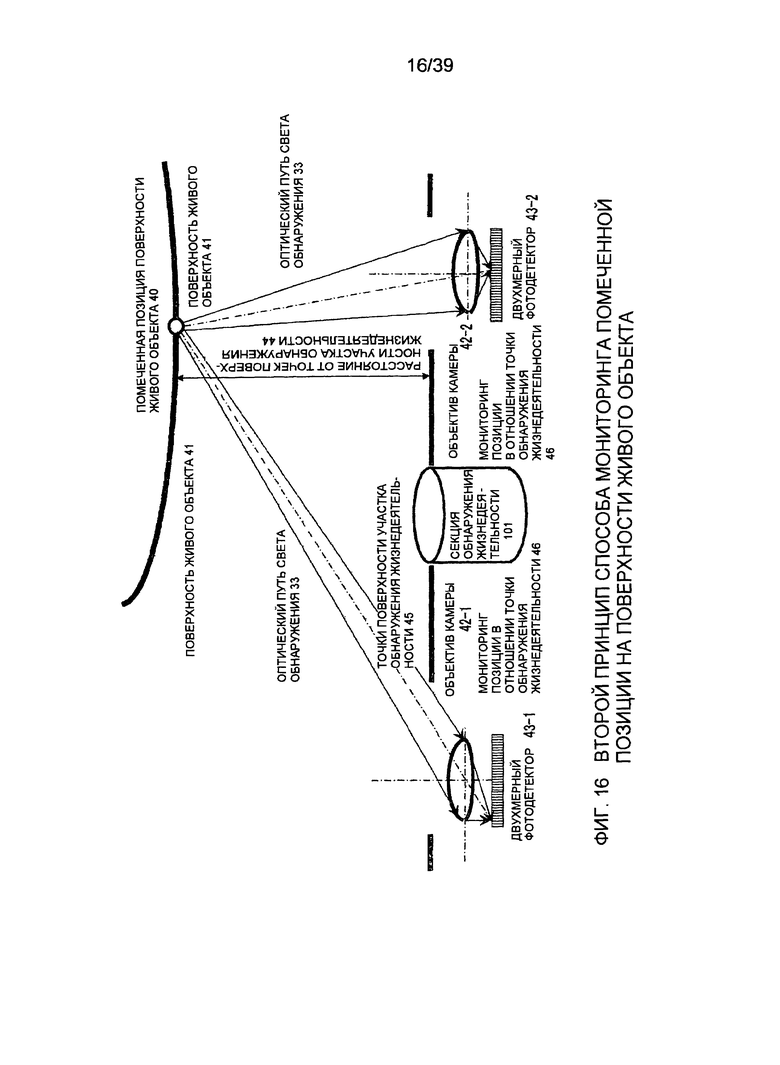
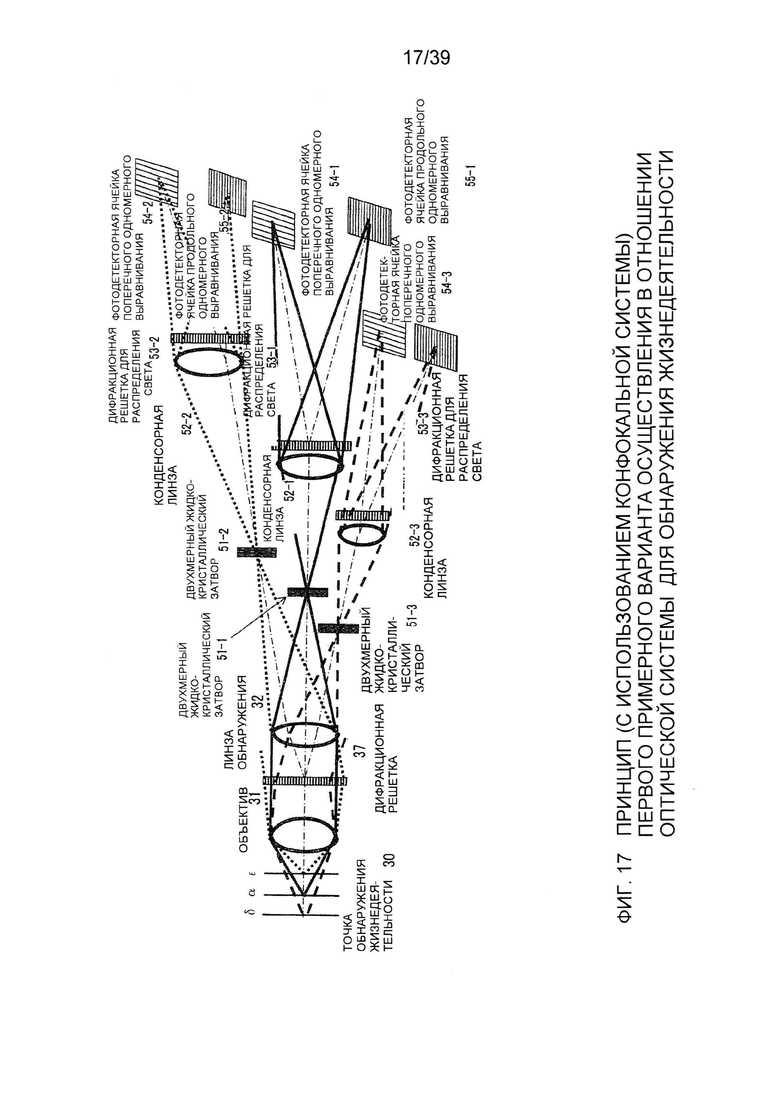
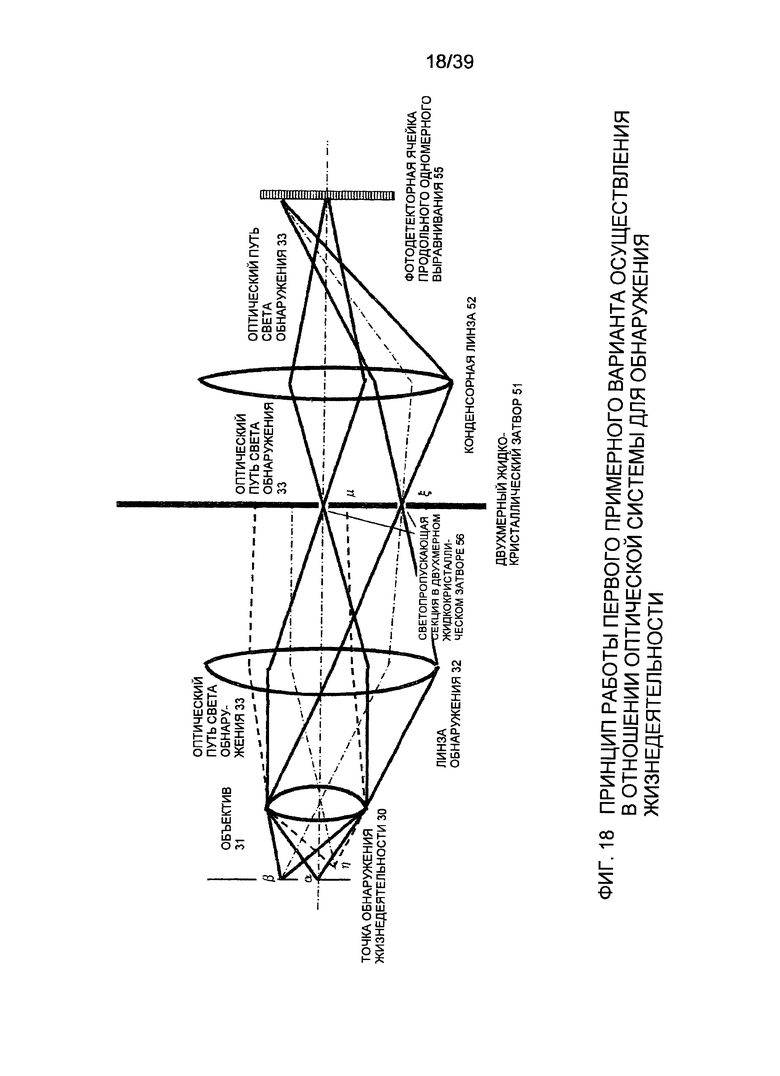
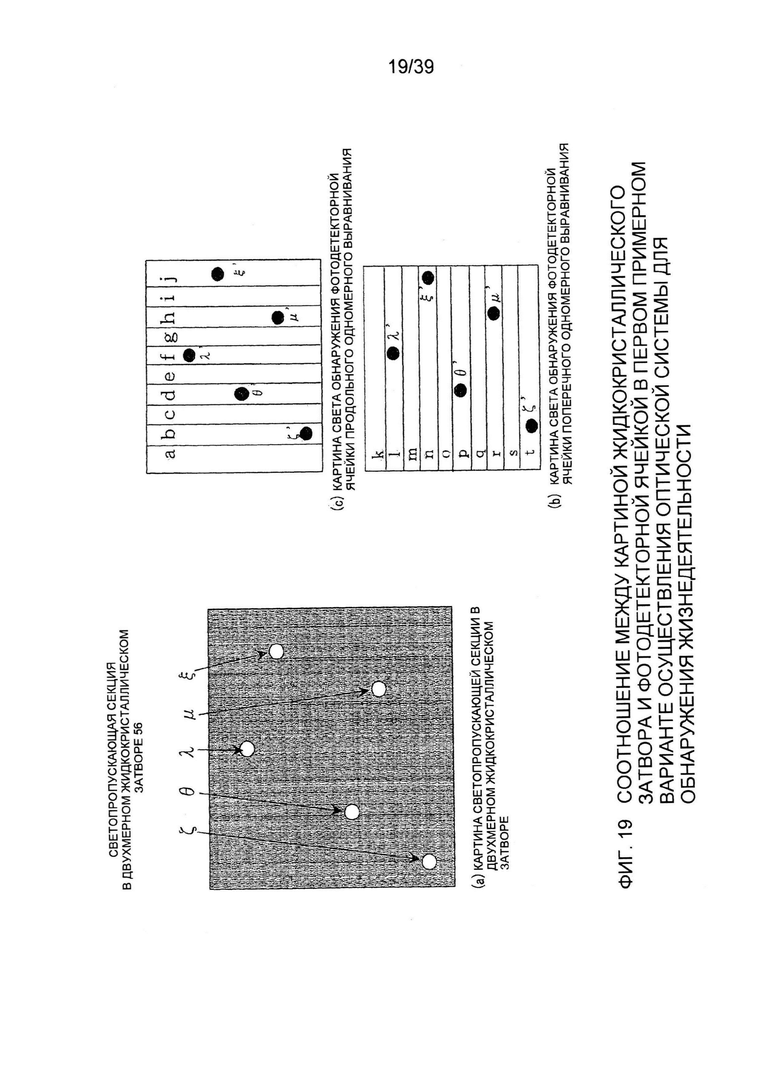
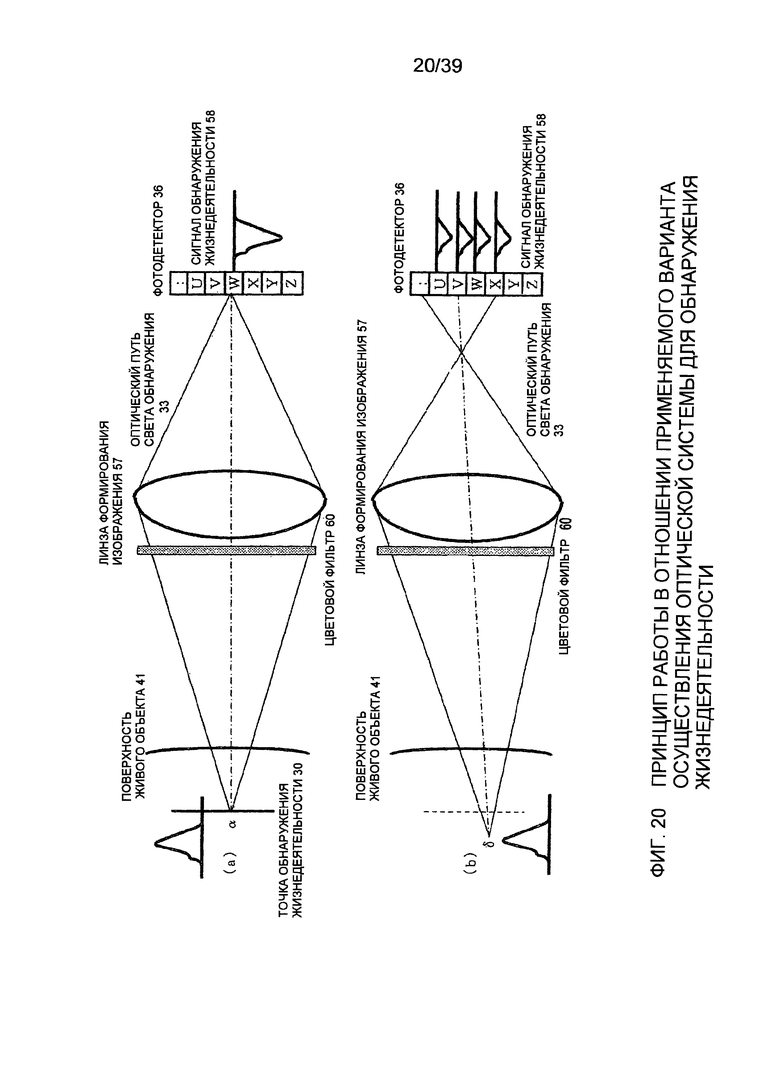
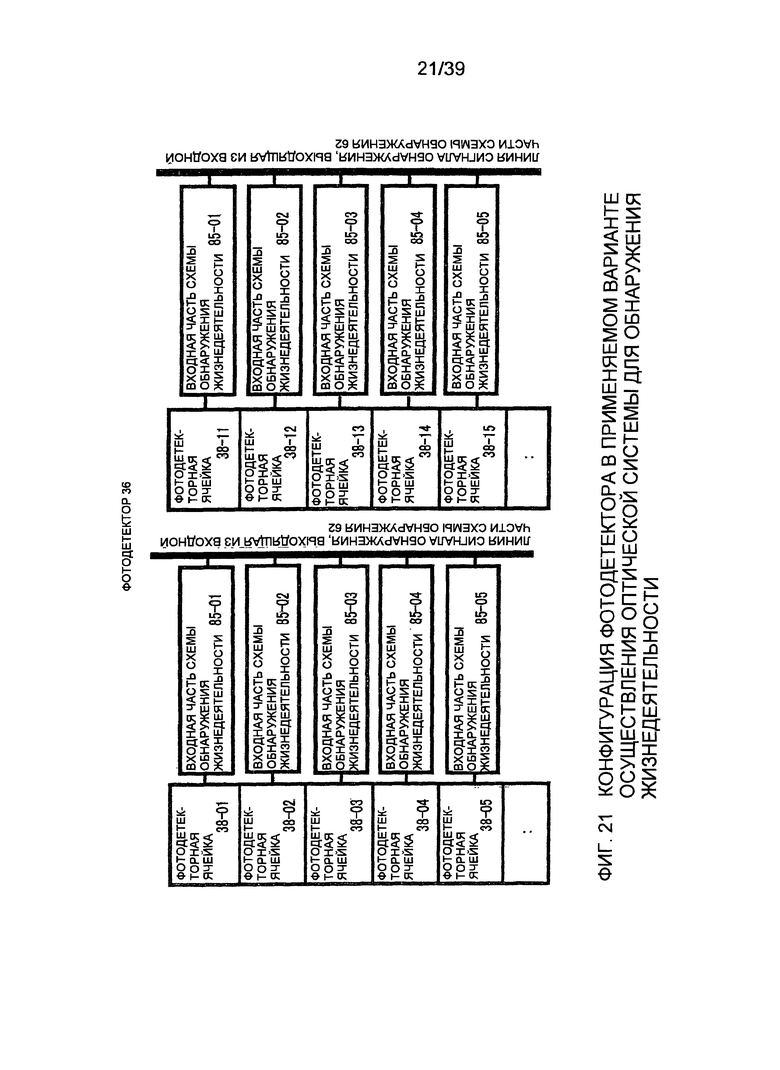
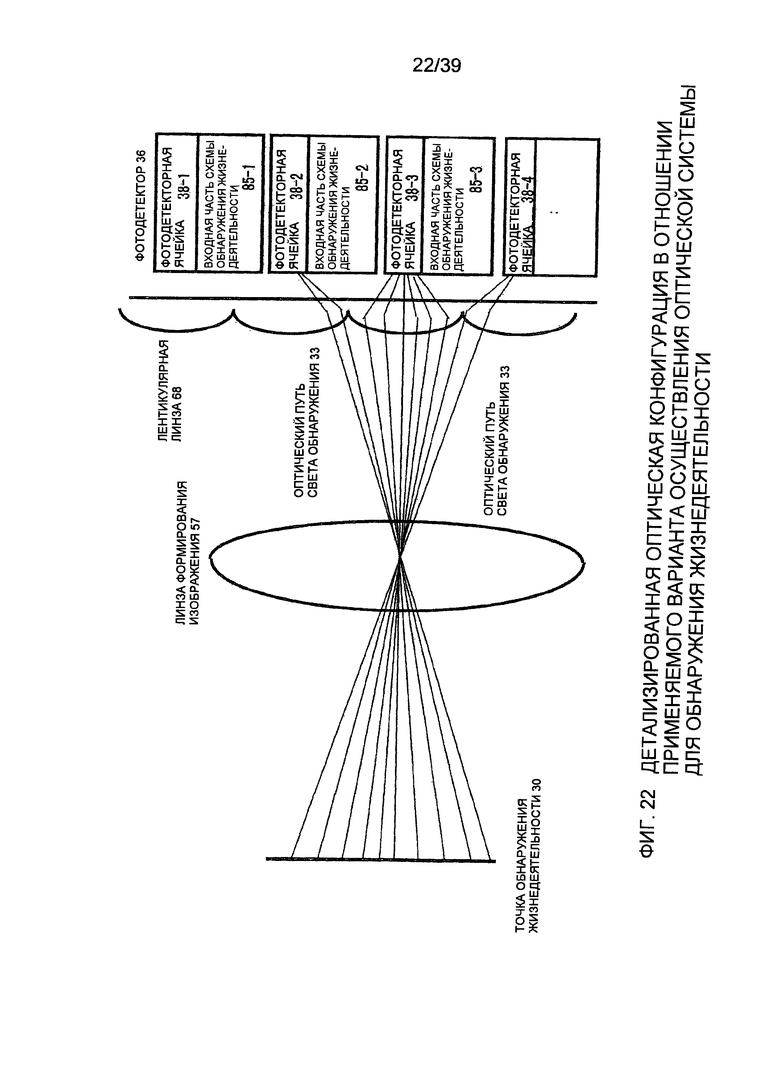
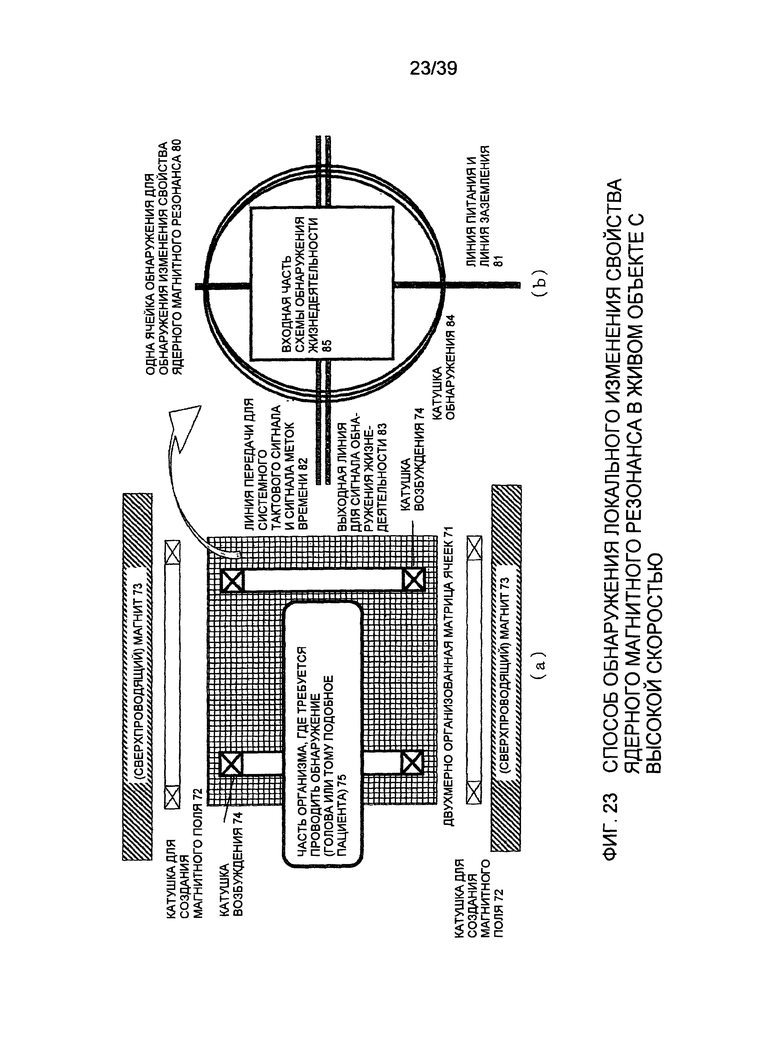
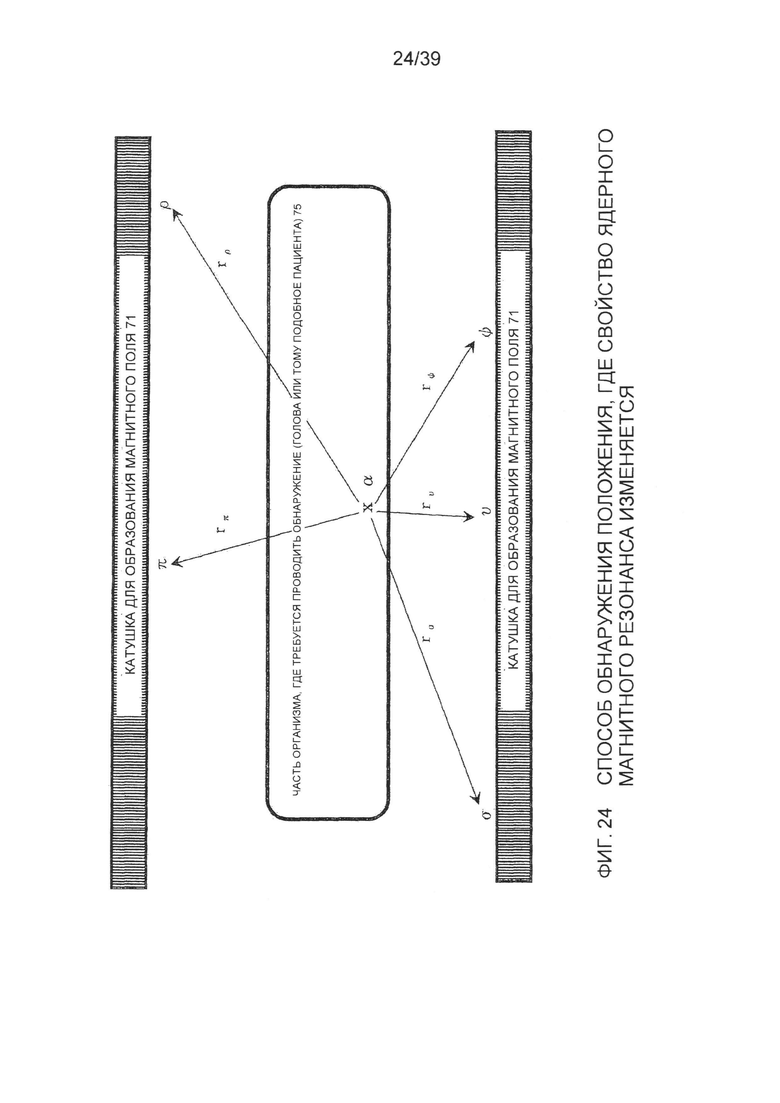
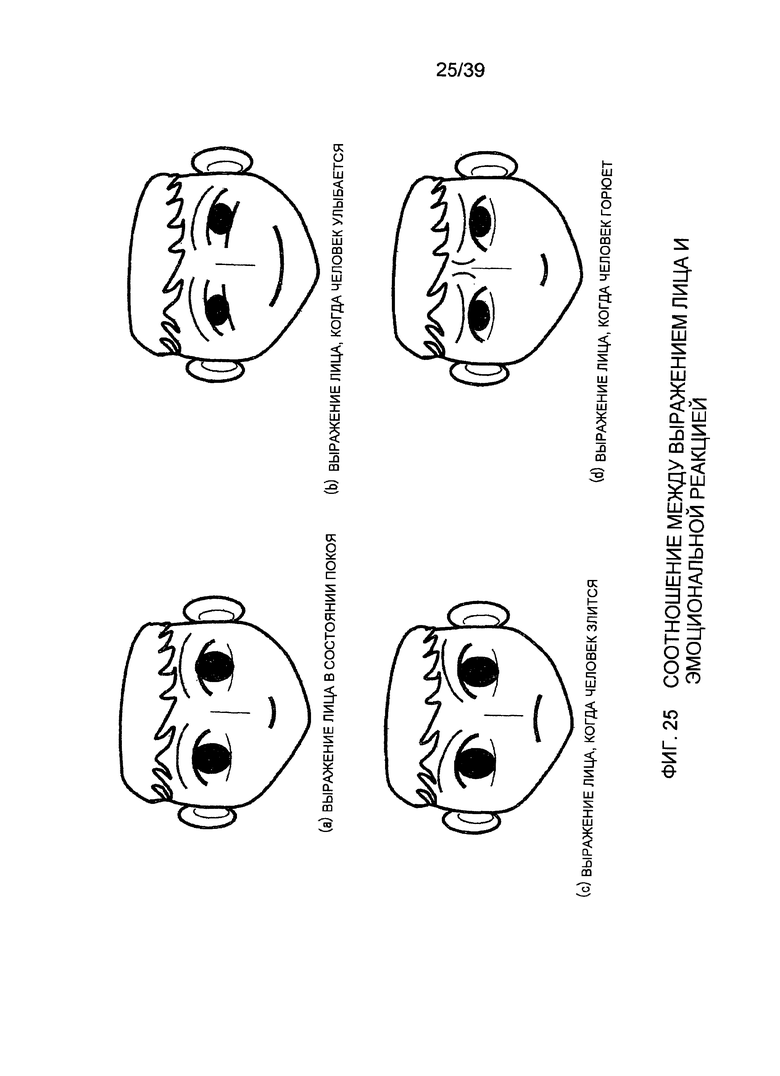

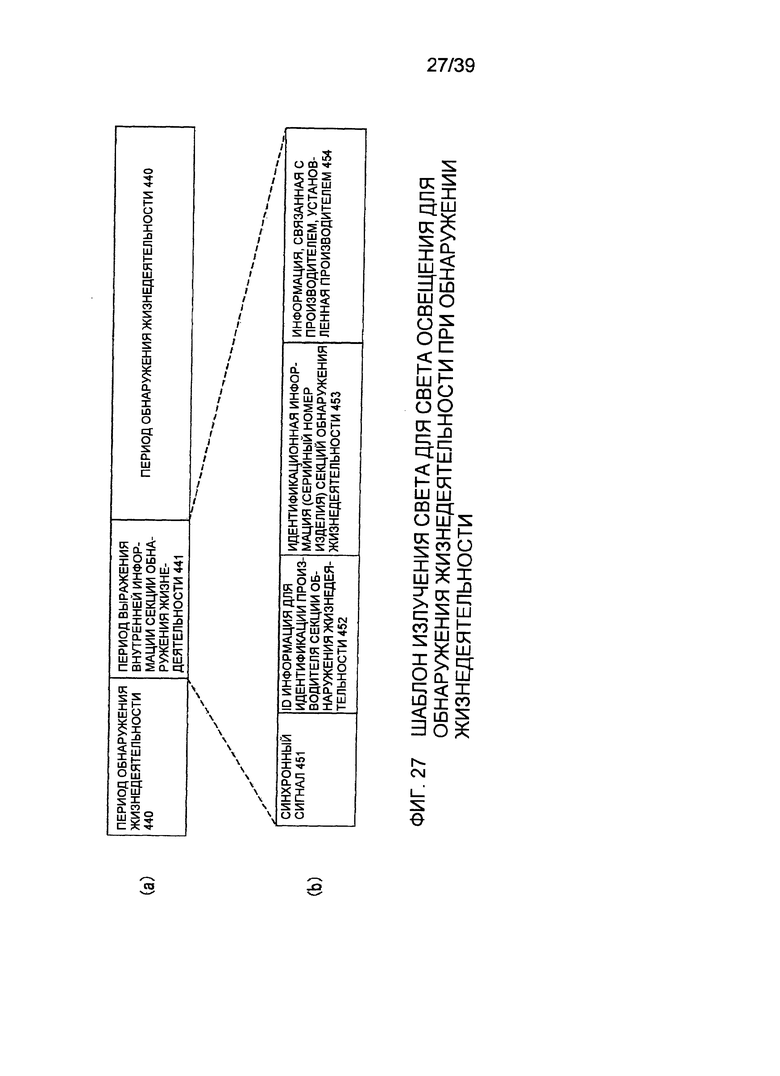
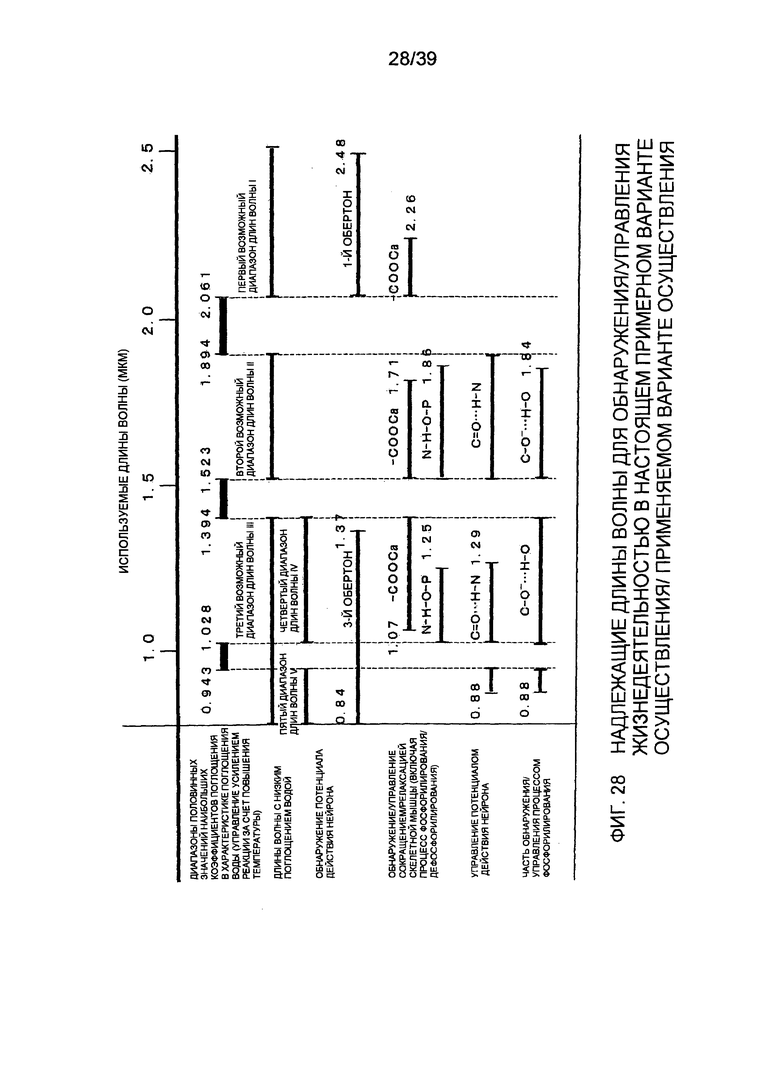
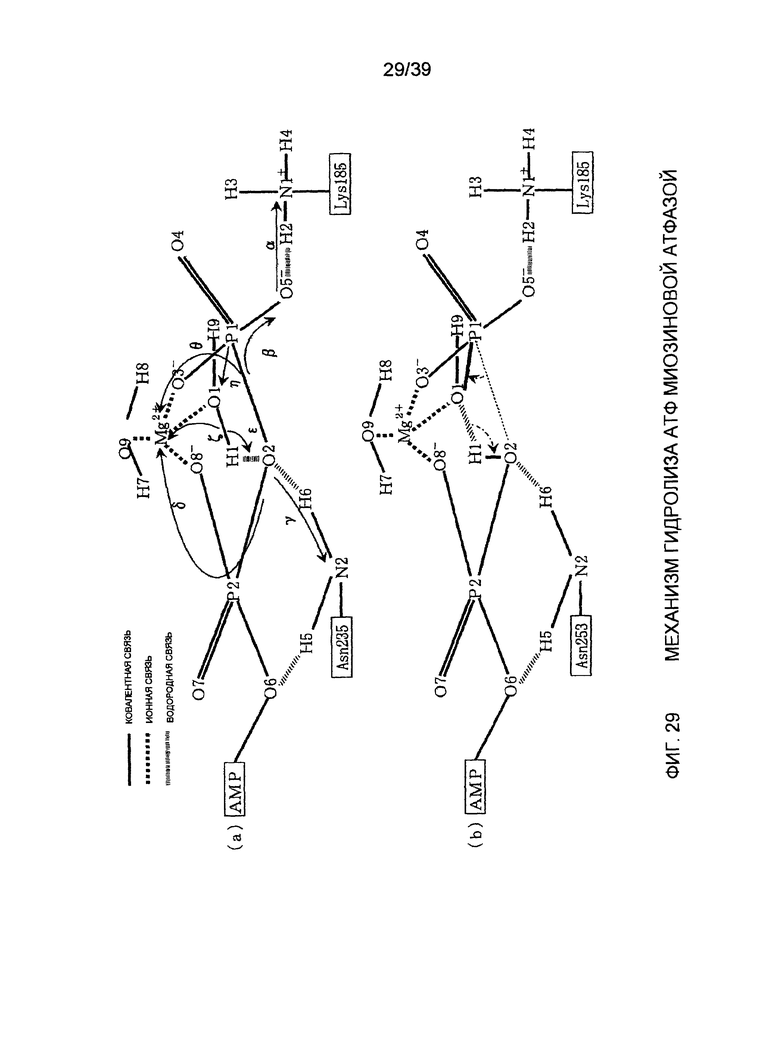
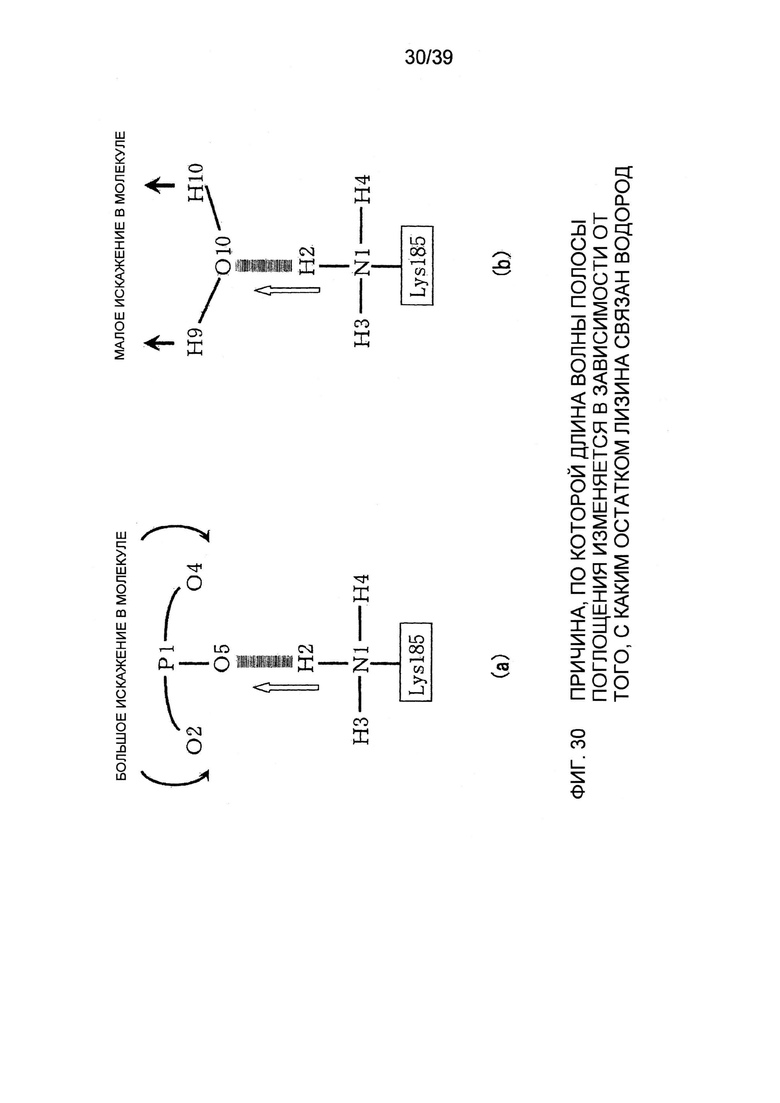
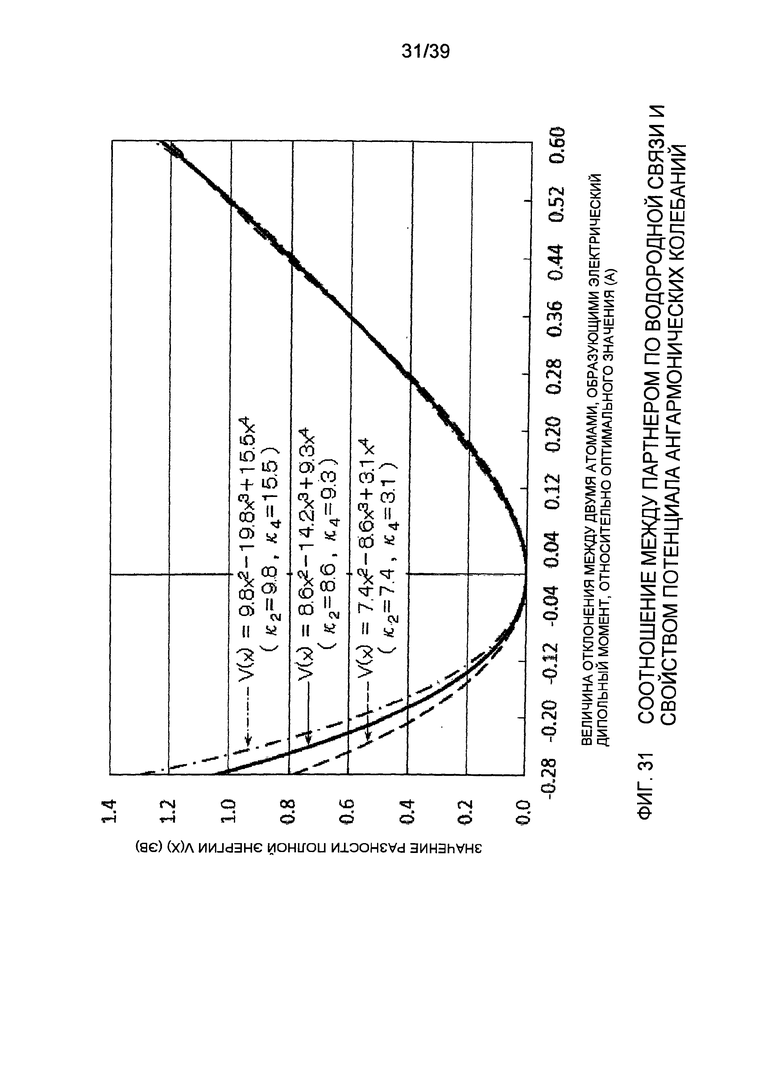
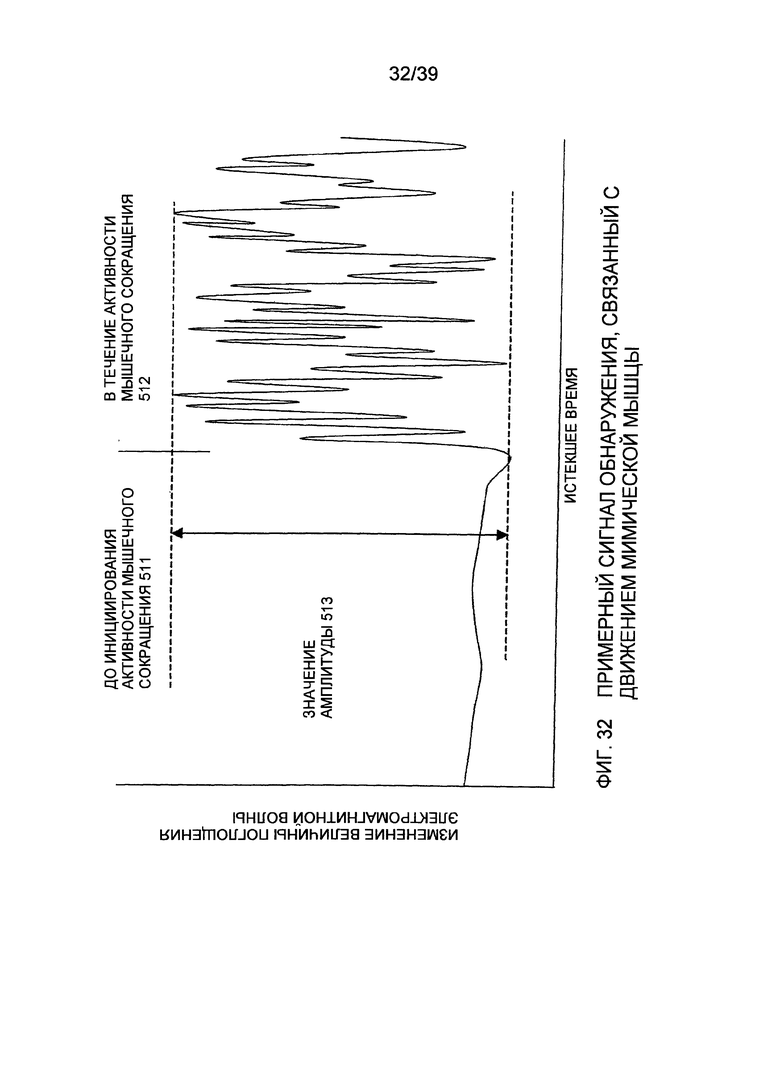
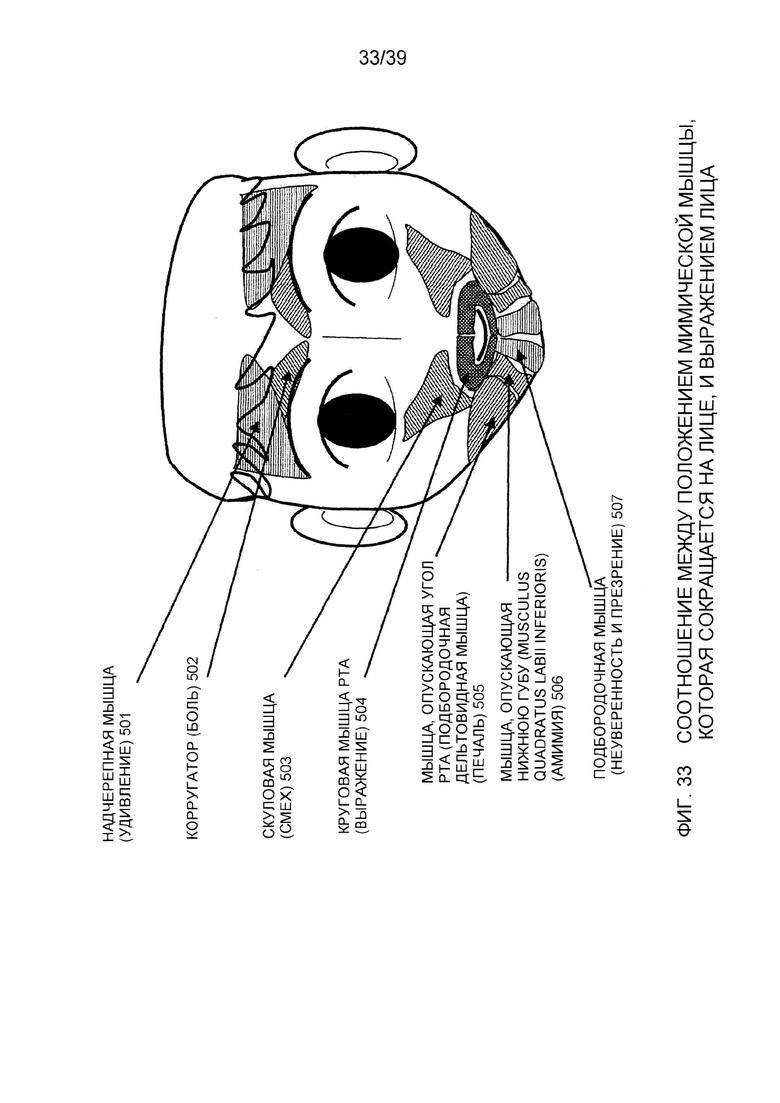
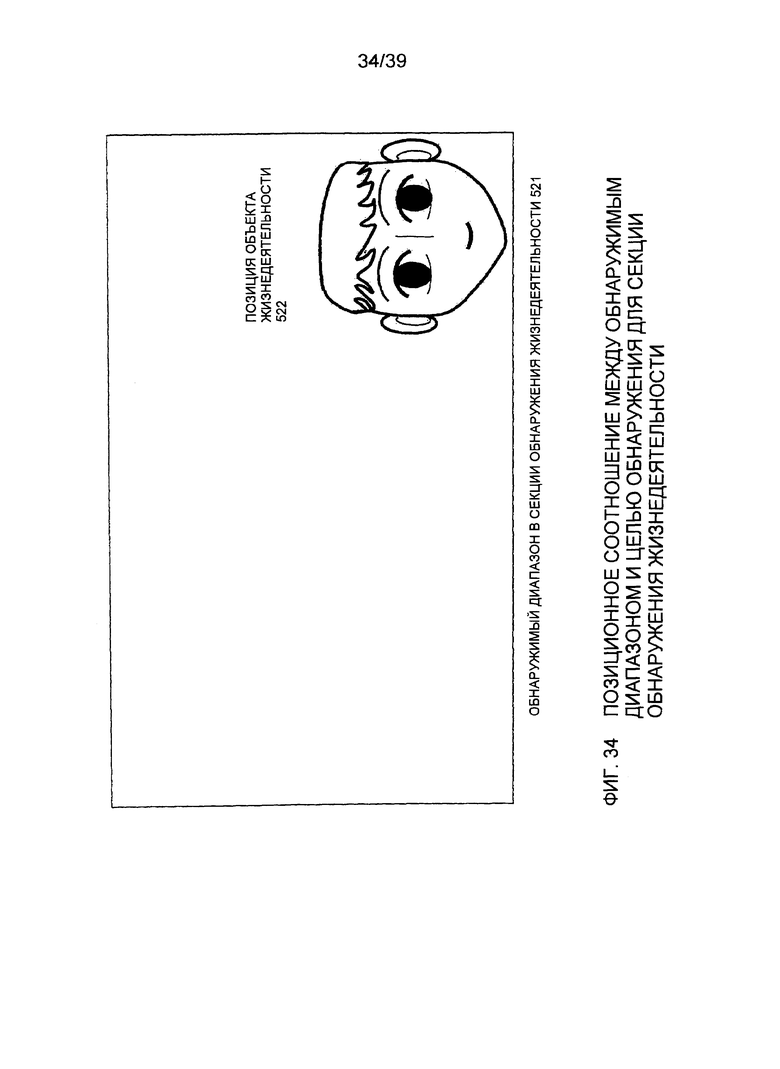
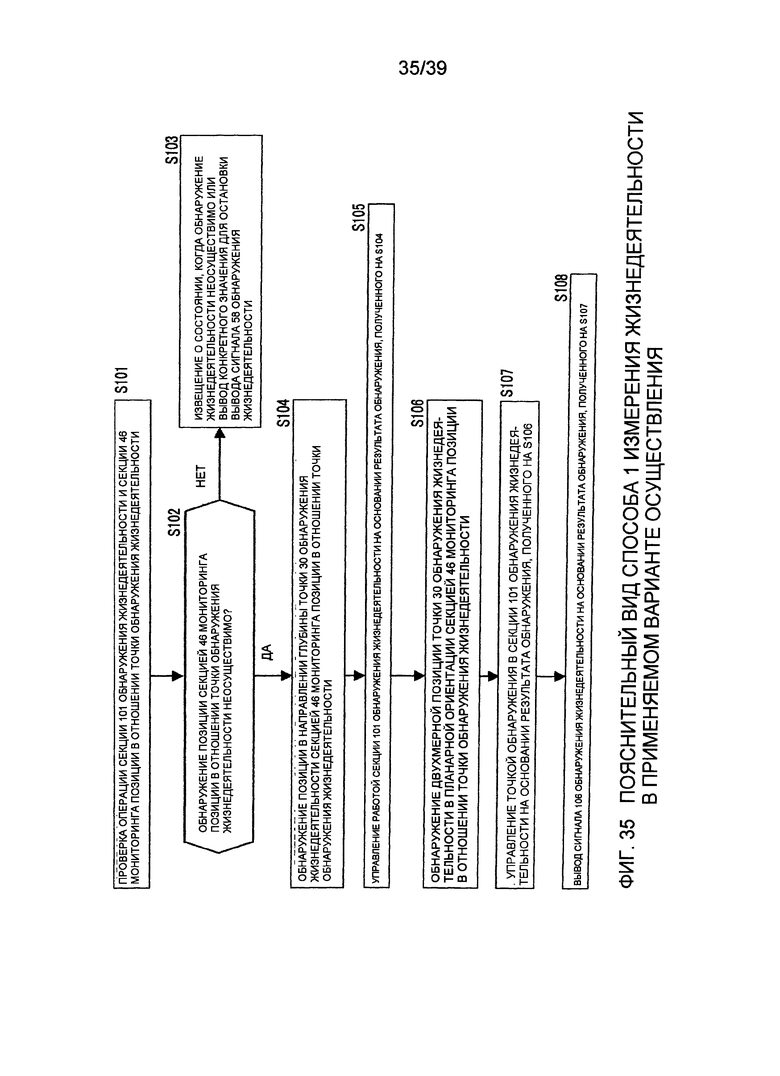
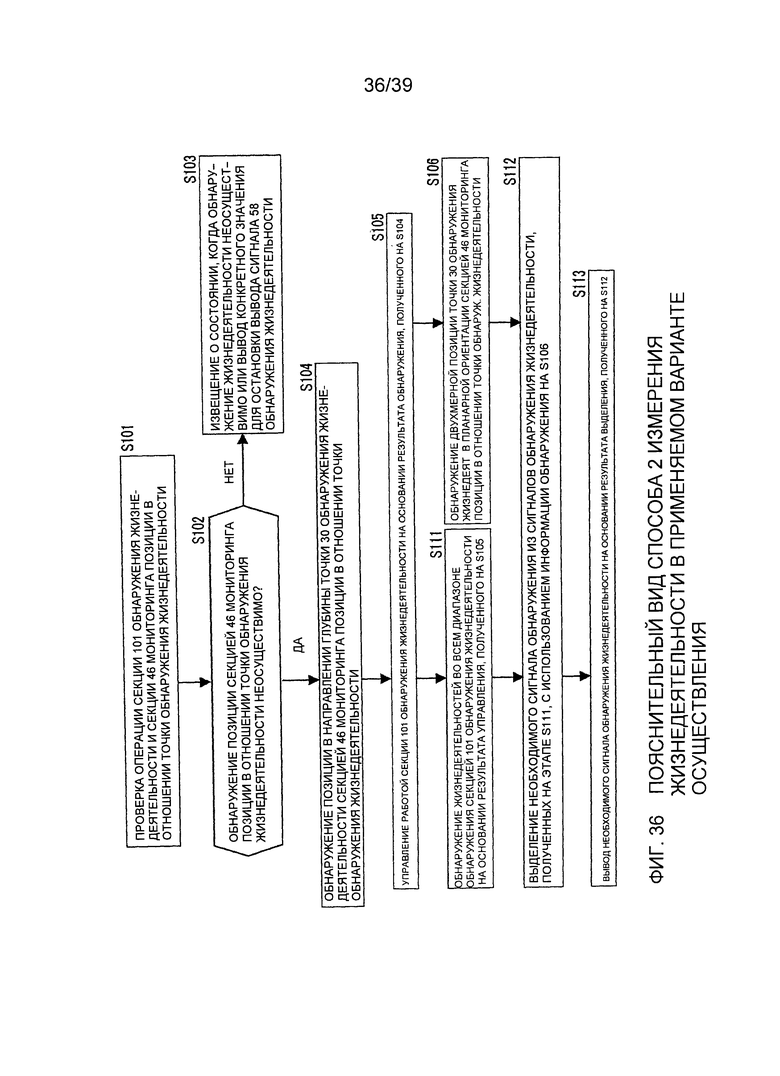
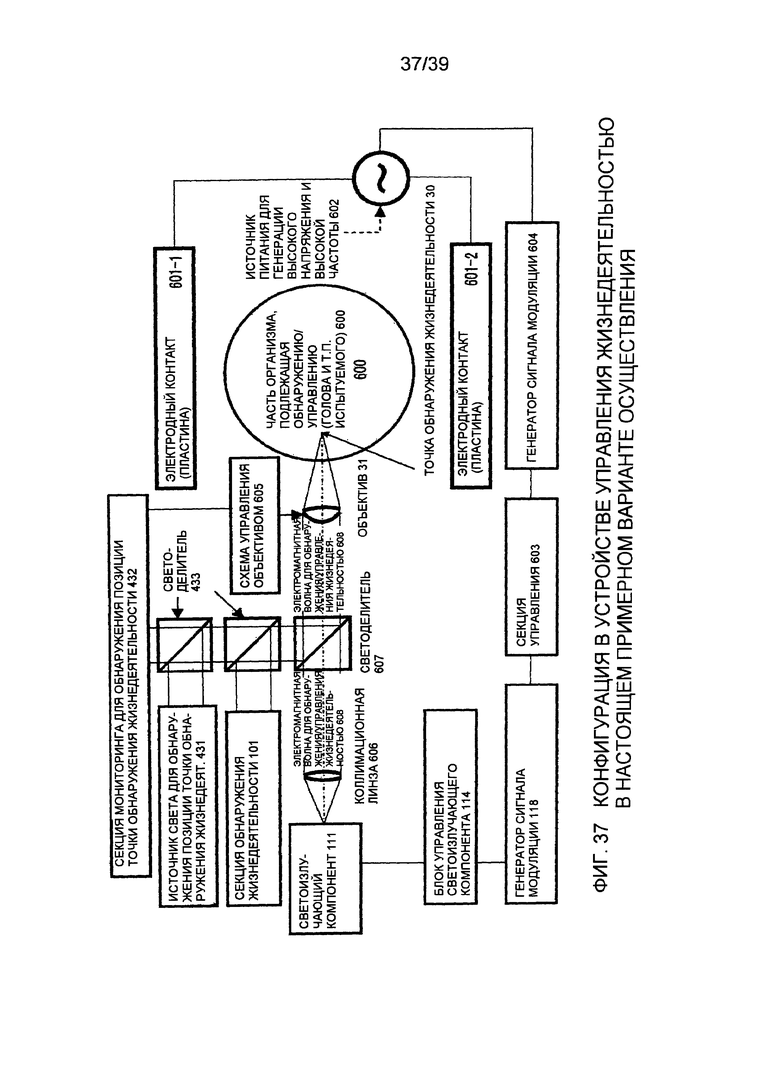
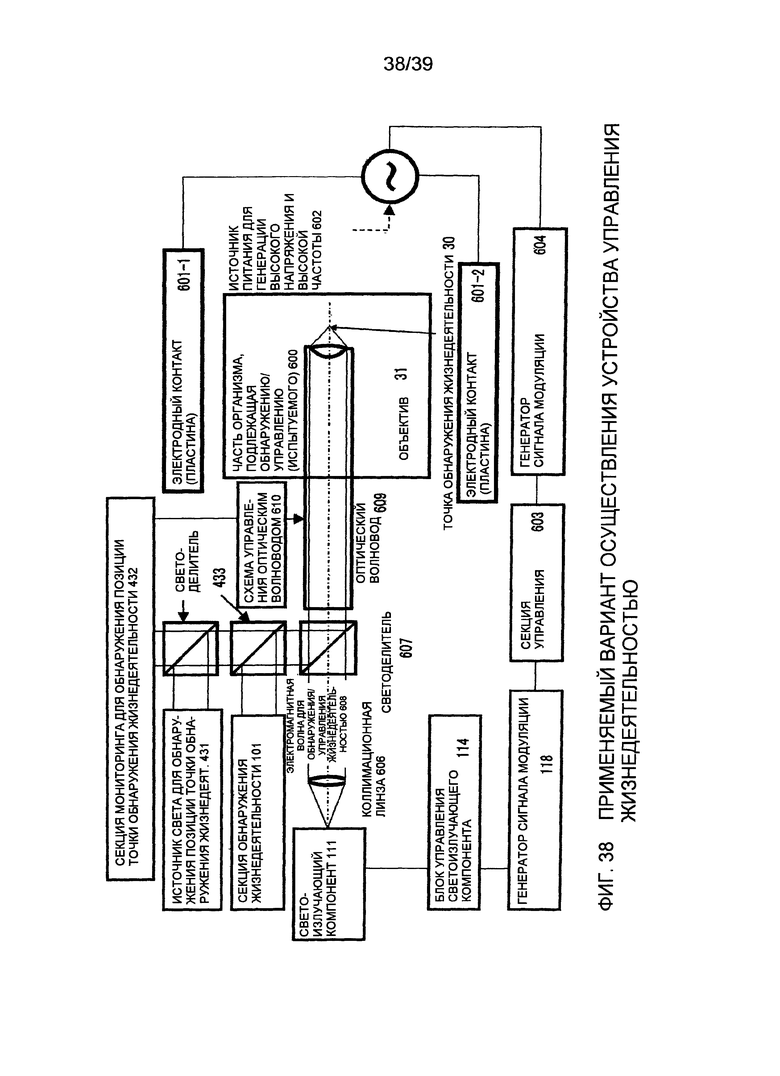
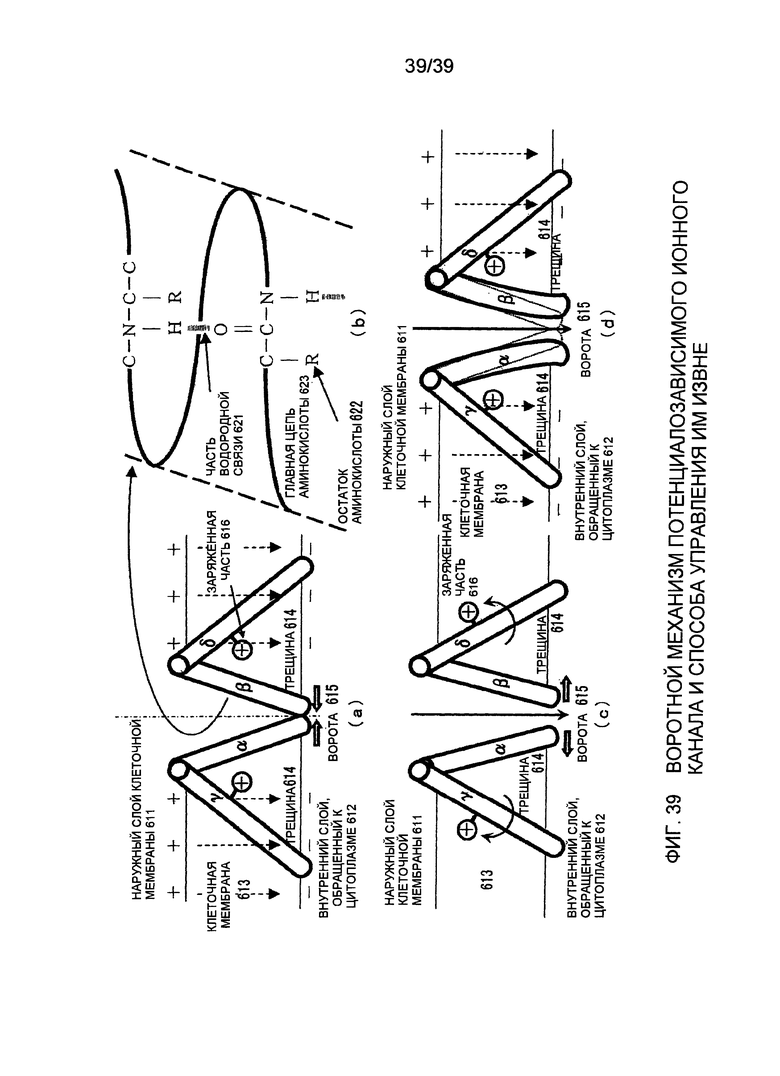
Группа изобретений относится к медицине и может быть использована для обнаружения активного состояния в живом объекте, управления им, а также для передачи информации, связанной с активным состоянием в живом объекте. Облучают живой объект первой электромагнитной волной, имеющей заданную длину волны, причем заданная длина волны включена в диапазон от 1,028 до 2,50 мкм. Обнаруживают активное состояние или его изменение, относящееся к второй электромагнитной волне. Вторая электромагнитная волна имеет ту же длину волны, что и упомянутая заданная длина волны. Вторую электромагнитную волну получают от детектируемого участка в живом объекте. Заданная длина волны относится к изменению длины волны полосы поглощения. Изменение длины волны полосы поглощения относится к колебанию атомов в детектируемом участке. Колебание атомов относится к по меньшей мере одному из атомов азота и углерода. Устройство наблюдения содержит светоизлучающий элемент, выполненный с возможностью излучения первой электромагнитной волны с упомянутой длиной волны для облучения живого объекта. Фотодетектор выполнен с возможностью приема второй электромагнитной волны с той же длиной волны, что и первая. Группа изобретений обеспечивает обнаружение активного состояния в живом объекте с высоким пространственным разрешением. 5 н. и 13 з.п. ф-лы, 39 ил., 6 табл.
1. Способ обнаружения активного состояния в живом объекте, содержащий этапы, на которых:
облучают живой объект первой электромагнитной волной, имеющей заданную длину волны, причем заданная длина волны включена в диапазон от 1,028 до 2,50 мкм, и
обнаруживают активное состояние или его изменение, относящееся к второй электромагнитной волне, причем вторая электромагнитная волна имеет ту же длину волны, что и упомянутая заданная длина волны, при этом вторую электромагнитную волну получают от детектируемого участка в живом объекте, заданная длина волны относится к изменению длины волны полосы поглощения, изменение длины волны полосы поглощения относится к конкретному колебанию атомов в детектируемом участке и конкретное колебание атомов относится к по меньшей мере одному из атомов азота и углерода.
2. Способ по п. 1, в котором
положением детектируемого участка позиционно управляют на основании отслеживания положения в направлении глубины внутри живого объекта,
положение детектируемого участка оптически отслеживают с помощью третьей электромагнитной волны, полученной от живого объекта, и
третья электромагнитная волна имеет ту же длину волны, что и упомянутая заданная длина волны.
3. Способ по п. 1, в котором детектируемый участок поглощает первую электромагнитную волну с заданной длиной волны.
4. Способ по п. 3, в котором активное состояние детектируемого участка изменяется в пределах периода времени, меньшего чем 5 секунд.
5. Способ по п. 2, в котором положением детектируемого участка позиционно управляют конкретным блоком устройства для перемещения объектива.
6. Способ по п. 2, в котором положение детектируемого участка отслеживают с использованием тригонометрии.
7. Способ управления активным состоянием в живом объекте, в котором
живой объект облучают электромагнитной волной, имеющей заданную длину волны,
заданная длина волны включена в диапазон от 0,945 до 2,50 мкм,
заданная длина волны относится к изменению длины волны полосы поглощения,
изменение длины волны полосы поглощения относится к конкретному колебанию атомов в управляемом участке,
конкретное колебание атомов относится к по меньшей мере одному из атомов азота и углерода,
по меньшей мере часть электромагнитной волны концентрируют на управляемом участке в живом объекте и
управляют активным состоянием управляемого участка.
8. Способ по п. 7, в котором
заданная длина волны ассоциирована с активным состоянием и
управляемый участок поглощает электромагнитную волну с заданной длиной волны для того, чтобы управлять активным состоянием управляемого участка.
9. Способ по п. 8, в котором
принимают электромагнитную волну обнаружения, полученную от детектируемого участка,
электромагнитная волна обнаружения имеет ту же длину волны, что и упомянутая заданная длина волны, и
обнаруживают активное состояние или его изменение, относящееся к электромагнитной волне обнаружения.
10. Способ по п. 9, в котором
мощность электромагнитной волны увеличивается во время управления активным состоянием и
мощность второй электромагнитной волны уменьшается во время обнаружения активного состояния.
11. Способ по п. 9, в котором
множество электромагнитных волн концентрируют на множестве разных управляемых участков, соответственно, и
независимо управляют активным состоянием множества разных управляемых участков.
12. Способ по п. 7, в котором
положением управляемого участка позиционно управляют на основании отслеживания положения в направлении глубины внутри живого объекта,
положением управляемого участка позиционно управляют конкретным блоком устройства для перемещения объектива.
13. Способ передачи информации, связанной с активным состоянием в живом объекте, содержащий этапы, на которых:
облучают живой объект первой электромагнитной волной, имеющей заданную длину волны, причем заданная длина волны включена в диапазон от 1,028 до 2,50 мкм;
обнаруживают активное состояние или его изменение, относящееся к второй электромагнитной волне, причем вторая электромагнитная волна имеет ту же длину волны, что и упомянутая заданная длина волны, и вторую электромагнитную волну получают от детектируемого участка в живом объекте, при этом заданная длина волны относится к изменению длины волны полосы поглощения, изменение длины волны полосы поглощения относится к конкретному колебанию атомов в детектируемом участке и конкретное колебание атомов относится к по меньшей мере одному из атомов азота и углерода, и
передают информацию, относящуюся к детектируемому активному состоянию или его изменению.
14. Устройство наблюдения, относящегося к живому объекту, содержащее:
светоизлучающий элемент, выполненный с возможностью излучения первой электромагнитной волны для облучения живого объекта, причем первая электромагнитная волна имеет заданную длину волны, причем заданная длина волны включена в диапазон от 1,028 до 2,50 мкм, и
фотодетектор, выполненный с возможностью приема второй электромагнитной волны, причем вторая электромагнитная волна имеет ту же длину волны, что и упомянутая заданная длина волны, и вторая электромагнитная волна получается от детектируемого участка в живом объекте, при этом заданная длина волны относится к изменению длины волны полосы поглощения, изменение длины волны полосы поглощения относится к конкретному колебанию атомов в детектируемом участке и конкретное колебание атомов относится к по меньшей мере одному из атомов азота и углерода.
15. Устройство наблюдения по п. 14, дополнительно выполненное с возможностью коррекции положения детектируемого участка в направлении глубины внутри живого объекта, причем положение детектируемого участка позиционно управляется на основании отслеживания положения в направлении глубины внутри живого объекта, при этом
положение детектируемого участка оптически отслеживается с помощью третьей электромагнитной волны, полученной от живого объекта, и
третья электромагнитная волна имеет ту же длину волны, что и упомянутая заданная длина волны.
16. Устройство наблюдения по п. 14, в котором детектируемый участок поглощает первую электромагнитную волну с заданной длиной волны.
17. Устройство наблюдения по п. 14, дополнительно выполненное с возможностью коррекции положения детектируемого участка в направлении глубины внутри живого объекта, причем положение детектируемого участка позиционно управляется на основании отслеживания положения в направлении глубины внутри живого объекта и положение детектируемого участка позиционно управляется конкретным блоком устройства для перемещения объектива.
18. Фотодетектор для приема электромагнитной волны, имеющей заданную длину волны, причем заданная длина волны включена в диапазон от 1,028 до 2,50 мкм, при этом
фотодетектор обладает чувствительностью к упомянутой заданной длине волны для генерации сигнала,
упомянутая электромагнитная волна получается от детектируемого участка в живом объекте,
заданная длина волны относится к изменению длины волны полосы поглощения,
изменение длины волны полосы поглощения относится к конкретному колебанию атомов в детектируемом участке,
конкретное колебание атомов относится к по меньшей мере одному из атомов азота и углерода и
живой объект облучается второй электромагнитной волной, имеющей ту же длину волны, что и упомянутая заданная длина волны.
| US 5685300 A, 11.11.1997 | |||
| US 2009216301 A1, 27.08.2009 | |||
| US 0006272370 B1, 07.08.2001 | |||
| US 2009062685 A1, 05.03.2009 | |||
| US2003171691 A1, 11.09.2003 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЭМОЦИОГЕННЫХ ЦЕРЕБРАЛЬНЫХ СИСТЕМ ЧЕЛОВЕКА | 2007 |
|
RU2336016C1 |

