ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к системе поиска информации, способу поиска информации и программе поиска информации, подходящим для автоматического поиска информации алгоритма обнаружения для получения спектральных данных, необходимых для определения целевого результата из предмета, или различных условий фотографирования у фотографирующего устройства, которое фотографирует предмет.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] На известном уровне техники предложено устройство захвата спектральных изображений, допускающее определение нужного результата в предмете путем спектрометрического анализа фотографического изображения предмета на основе длины волны. Устройство захвата спектральных изображений может получать спектрометрическую информацию с высоким спектральным разрешением (в дальнейшем называемую "гиперспектральными данными") по нескольким десяткам областей длин волн от ультрафиолетового диапазона длин волн до видимого диапазона длин волн и далее до инфракрасного диапазона длин волн со спектральным разрешением от 0,1 нм до 100 нм. Используя такие гиперспектральные данные, можно с высокой точностью анализировать, например, свежесть продуктов, дефекты строительных конструкций, фотосинтез растений, содержащиеся в полезных ископаемых химические элементы, увлажнение или пятна на коже и т.п. То есть, используя устройство захвата спектральных изображений, можно не только просто фотографировать предмет, но также обнаруживать целевой результат в том предмете.
[0003] Например, в патентных документах 1 и 2 раскрываются примеры устройства захвата спектральных изображений, допускающего получение гиперспектральных данных.
[0004] Патентный документ 1 рассматривает устройство захвата спектральных изображений, в котором в качестве целевого результата устанавливается область опухоли в организме человека. В этой методике из патентного документа 1 область опухоли и область без опухоли распознаются путем обнаружения элемента, осевшего в раковой клетке, уделяя внимание длине волны флуоресцентного излучения.
[0005] Патентный документ 2 рассматривает устройство обработки информации для определения, является ли предмет фруктом. То, является ли предмет фруктом, определяется путем получения заранее базовой характеристической величины фрукта и ее сравнения с характеристической величиной спектрального изображения фактически фотографируемого предмета. Все базовые характеристические величины основываются на спектральных данных.
[0006] К тому же рассмотрена методика, нацеленная на анализ изображений в гиперспектральных данных (например, см. патентный документ 3).
Список источников
Патентные документы
[0007] Патентный документ 1: международная публикация PCT № WO2013/002350
Патентный документ 2: JP-A-2017-3495
Патентный документ 3: JP-A-2015-166682
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая проблема
[0008] Однако требуется много времени и усилий, чтобы изучить алгоритм обнаружения для получения спектральных данных, необходимых для определения целевого результата в предмете. Также необходимы технические знания.
[0009] Например, в описанном выше алгоритме обнаружения для получения спектральных данных об области опухоли в организме человека алгоритм обнаружения, допускающий обнаружение флуоресценции, сосредоточен на том, что протопорфирин IX, накопленный в раковой клетке, излучает с длиной волны 635 нм, а фотопротопорфирин излучает с длиной волны 675 нм. Чтобы построить такой алгоритм обнаружения, необходимы технические знания, например, какой элемент накапливается в раковой клетке, или с какой длиной волны идет флуоресценция, или т. п. К тому же требуется много времени и усилий, чтобы провести различные исследования для точного извлечения только флуоресценции и ее точного определения.
[0010] По этой причине на известном уровне техники требовалась технология, допускающая легкое получение оптимального алгоритма обнаружения всякий раз, когда в предмете последовательно формируется новый целевой результат. Однако патентные документы с 1 по 3 не рассмотрели технологию для получения оптимального алгоритма обнаружения в зависимости от целевого результата в предмете.
[0011] Также необходимо уменьшить стоимость или период разработки путем автоматического поиска условия для проектирования устройства захвата изображений для фактического формирования изображения предмета или условия для фотографирования предмета (в дальнейшем обобщенно называемого "условием фотографирования"). Однако патентные документы с 1 по 3 не рассмотрели технологию, допускающую удовлетворение такой потребности.
[0012] Поэтому в связи с вышеупомянутыми проблемами задачей изобретения является предоставление системы поиска информации, способа поиска информации и программы поиска информации, допускающих автоматический поиск информации алгоритма обнаружения для получения спектральных данных, необходимых для определения целевого результата из предмета, и условия фотографирования у фотографирующего устройства, которое фотографирует предмет.
Решение задачи
[0013] Чтобы решить вышеупомянутые задачи, авторы изобретения создали систему поиска информации, способ поиска информации и программу поиска информации для поиска информации алгоритма обнаружения, необходимой для определения целевого результата из фотографируемого предмета, где принимают входную информацию о целевом результате в предмете, который нужно определить, и ищут одну или несколько порций информации алгоритма обнаружения на основе информации о введенном целевом результате путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения, сохраненному в первой реляционной базе данных.
[0014] В соответствии с настоящим изобретением предоставляется система поиска информации для поиска информации алгоритма обнаружения в спектральных данных, необходимых для определения целевого результата из фотографируемого предмета, при этом система поиска информации включает в себя: первую реляционную базу данных, сконфигурированную для сохранения заранее первого индекса релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения; средство ввода целевого результата, сконфигурированное для приема информации о целевом результате в предмете, который нужно вновь определить; и средство поиска, сконфигурированное для поиска одной или нескольких порций информации алгоритма обнаружения на основе информации о целевом результате, принятой средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных.
[0015] В соответствии с настоящим изобретением предоставляется система поиска информации для поиска условия фотографирования у фотографирующего устройства для определения целевого результата из фотографируемого предмета, при этом система поиска информации включает в себя: первую реляционную базу данных, сконфигурированную для сохранения заранее первого индекса релевантности с тремя или более уровнями между каждым целевым результатом в предмете и каждым условием фотографирования; средство ввода целевого результата, сконфигурированное для приема информации о целевом результате в предмете, который нужно вновь определить; и средство поиска, сконфигурированное для поиска одного или нескольких условий фотографирования на основе информации о целевом результате, принятой средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных.
[0016] В соответствии с настоящим изобретением предоставляется программа поиска информации для поиска информации алгоритма обнаружения, необходимой для определения целевого результата из фотографируемого предмета, при этом программа поиска информации побуждает компьютер исполнить: этап ввода целевого результата, состоящий в приеме ввода информации о целевом результате в предмете, который нужно вновь определить; и этап поиска, состоящий в поиске одной или нескольких порций информации алгоритма обнаружения на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения, сохраненному в первой реляционной базе данных.
[0017] В соответствии с настоящим изобретением предоставляется программа поиска информации для поиска условия фотографирования у фотографирующего устройства для определения целевого результата из фотографируемого предмета, при этом программа поиска информации побуждает компьютер исполнить: этап ввода целевого результата, состоящий в приеме входной информации о целевом результате в предмете, который нужно вновь определить; и этап поиска, состоящий в поиске одного или нескольких условий фотографирования на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и каждым условием фотографирования, сохраненному в первой реляционной базе данных.
[0018] В соответствии с настоящим изобретением предоставляется способ поиска информации для поиска информации алгоритма обнаружения, необходимой для определения целевого результата из фотографируемого предмета, при этом способ поиска информации включает в себя: этап ввода целевого результата, состоящий в приеме ввода информации о целевом результате в предмете, который нужно вновь определить; и этап поиска, состоящий в поиске одной или нескольких порций информации алгоритма обнаружения на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения, сохраненному в первой реляционной базе данных. Каждый из этапов исполняется компьютером.
[0019] В соответствии с настоящим изобретением предоставляется способ поиска информации для поиска условия фотографирования у фотографирующего устройства для определения целевого результата из фотографируемого предмета, при этом способ поиска информации включает в себя: этап ввода целевого результата, состоящий в приеме входной информации о целевом результате в предмете, который нужно вновь определить; и этап поиска, состоящий в поиске одного или нескольких условий фотографирования на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и каждым условием фотографирования, сохраненному в первой реляционной базе данных. Каждый из этапов исполняется компьютером.
Полезные результаты изобретения
[0020] В соответствии с настоящим изобретением с вышеупомянутой конфигурацией можно легко получить оптимальную информацию алгоритма обнаружения в спектральных данных в зависимости от целевого результата в предмете, который нужно определить. По этой причине можно уменьшить трудовые затраты для изучения оптимального алгоритма обнаружения и сократить время, когда в предмете последовательно формируется новый целевой результат.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] Фиг. 1 - блок-схема, иллюстрирующая общую конфигурацию системы поиска информации в соответствии с первым вариантом осуществления изобретения;
Фиг. 2 - блок-схема, иллюстрирующая устройство поиска в системе поиска информации;
Фиг. 3 - блок-схема, иллюстрирующая устройство захвата спектральных изображений в системе поиска информации;
Фиг. 4 - схема для описания подробной конфигурации блока управления в устройстве захвата спектральных изображений;
Фиг. 5 - схема, иллюстрирующая примерную структурную конфигурацию фотографирующего устройства;
Фиг. 6 - блок-схема алгоритма, иллюстрирующая последовательность операций обработки в программе поиска информации;
Фиг. 7 - схема для описания примера для определения свежести фрукта с использованием спектральных данных;
Фиг. 8 - схема, иллюстрирующая сеть, в которой базовый целевой результат в предмете и информация алгоритма обнаружения ассоциируются друг с другом, используя первый индекс релевантности;
Фиг. 9 - схема, иллюстрирующая пример, в котором различные параметры осветительной системы и системы формирования изображения ассоциируются в дополнение к целевому результату в предмете с использованием первого индекса релевантности;
Фиг. 10 - схема для описания другого примера первого индекса релевантности;
Фиг. 11 - схема, иллюстрирующая сеть, в которой базовые целевые результаты в предмете и условия фотографирования ассоциируются друг с другом с использованием первого индекса релевантности;
Фиг. 12 - схема, иллюстрирующая сеть, в которой базовые целевые результаты в предметах, базовые условия фотографирования и условия фотографирования ассоциируются друг с другом с использованием первого индекса релевантности;
Фиг. 13 - схема информационных потоков, начиная с ввода целевого результата в предмете, и пока не получено условие фотографирования у фотографирующего устройства;
Фиг. 14 - блок-схема, иллюстрирующая общую конфигурацию системы поиска информации в соответствии со вторым вариантом осуществления изобретения;
Фиг. 15 - схема, иллюстрирующая пример, в котором условия фотографирования ассоциируются с сочетаниями множества порций информации алгоритма обнаружения или т. п., используя второй индекс релевантности с тремя или более уровнями;
Фиг. 16 - схема для описания другого примера второго индекса релевантности;
Фиг. 17 - схема для описания примерного сочетания вторых индексов релевантности;
Фиг. 18 - схема, иллюстрирующая пример, в котором с левой стороны задается условие фильтрации в базовой информации алгоритма обнаружения, а с правой стороны состояние элемента захвата изображений задается в условии фотографирования;
Фиг. 19 - схема, иллюстрирующая третий индекс релевантности, необходимый для автоматического определения целевого результата с использованием спектральных данных;
Фиг. 20 - схема, иллюстрирующая третий индекс релевантности с тремя или более уровнями между сочетанием и исходом определения целевого результата в предмете; и
Фиг. 21 - схема, иллюстрирующая пример, в котором четвертый индекс релевантности с тремя или более уровнями задается вместе с проектной информацией, которую нужно найти.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0022] Сейчас будет подробно описываться система поиска информации в соответствии с настоящим изобретением со ссылкой на прилагаемые чертежи.
[0023] Первый вариант осуществления
Фиг. 1 - блок-схема, иллюстрирующая общую конфигурацию системы 1 поиска информации в соответствии с первым вариантом осуществления изобретения. Система 1 поиска информации предназначена для поиска информации алгоритма обнаружения, которую нужно предоставить устройству 4 захвата спектральных изображений. Система 1 поиска информации включает в себя базу 3 данных алгоритмов, устройство 2 поиска, подключенное к базе данных алгоритмов, и устройство 4 захвата спектральных изображений и фотографирующее устройство 5, подключенные к устройству 2 поиска.
[0024] База 3 данных алгоритмов содержит базу данных для предоставления информации алгоритма обнаружения устройству 4 захвата спектральных изображений. К тому же база 3 данных алгоритмов содержит базу данных касательно условия фотографирования у фотографирующего устройства 5. В этой базе 3 данных алгоритмов накапливается информация, передаваемая по общедоступной сети связи, или информация, вводимая пользователем системы. Кроме того, база 3 данных алгоритмов передает накопленную информацию устройству 2 поиска в ответ на запрос от устройства 2 поиска.
[0025] Устройство 2 поиска является электронным устройством, например персональным компьютером (ПК). В качестве альтернативы устройство 2 поиска можно реализовать с использованием любых других электронных устройств вместо ПК, например мобильного телефона, смартфона, планшетного терминала или носимого терминала.
[0026] Фиг. 2 - примерная характерная конфигурация устройства 2 поиска. Устройство 2 поиска включает в себя блок 24 управления для управления всем устройством 2 поиска, манипуляционный блок 25 для ввода различных управляющих команд с использованием кнопки, клавиатуры или т.п., блок 26 связи для выполнения проводной связи или радиосвязи, блок 27 поиска, который ищет оптимальную информацию алгоритма обнаружения, и запоминающее устройство 28, например жесткий диск, которое хранит программу для исполнения поиска. Они подключаются друг к другу посредством внутренней шины 21. К тому же к внутренней шине 21 подключается блок 23 отображения в качестве монитора для фактического отображения информации.
[0027] Блок 24 управления является так называемым центральным блоком управления для управления каждым элементом, встроенным в устройство 2 поиска, путем передачи управляющего сигнала по внутренней шине 21. К тому же блок 24 управления передает различные управляющие команды по внутренней шине 21 в ответ на манипуляцию в манипуляционном блоке 25.
[0028] Манипуляционный блок 25 реализуется с использованием клавиатуры или сенсорной панели и принимает от пользователя команду исполнения для исполнения программы. Когда от пользователя принимается команда исполнения, манипуляционный блок 25 сообщает ее блоку 24 управления. Оповещенный блок 24 управления активизирует блок 27 поиска и позволяет каждому элементу взаимодействовать друг с другом для исполнения нужной операции обработки.
[0029] Блок 27 поиска ищет информацию алгоритма обнаружения в спектральных данных, необходимых для определения целевого результата из предмета, фотографируемого устройством 4 захвата спектральных изображений. Блок 27 поиска в качестве информации, необходимой для исполнения операции поиска, считывает различные типы информации, сохраненной в запоминающем устройстве 28, или различные типы информации, сохраненной в базе данных алгоритмов. Блок 27 поиска может управляться искусственным интеллектом. Искусственный интеллект может основываться на любой методике искусственного интеллекта, известной в данной области техники.
[0030] Блок 23 отображения содержит графический контроллер, который создает визуальное отображение под управлением блока 24 управления. Блок 23 отображения включает в себя, например, жидкокристаллический дисплей (LCD) или т.п.
[0031] Заранее установленная информация по необходимости записывается или считывается из каждого адреса запоминающего устройства 28, например жесткого диска, под управлением блока 24 управления. К тому же запоминающее устройство 28 хранит программу для исполнения настоящего изобретения. Программа считывается и исполняется блоком 24 управления.
[0032] Фиг. 3 иллюстрирует примерную конфигурацию устройства 4 захвата спектральных изображений. Устройство 4 захвата спектральных изображений включает в себя так называемую многоспектральную камеру, камеру со сменным светофильтром или камеру с призмой. Устройство 4 захвата спектральных изображений фотографирует предмет и получает из этого спектральное изображение. Устройство 4 захвата спектральных изображений создает спектральное изображение на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны. Спектральное изображение, созданное устройством 4 захвата спектральных изображений, включает в себя множество двумерных изображений, представляющих отражательную способность или пропускаемость у предмета для каждой длины волны. Пример спектрального изображения может обладать спектральным разрешением от 0,1 нм до 100 нм в области длин волн с заранее установленным диапазоном длин волн от 200 нм до 13 мкм, так что спектральные изображения создаются для каждой полосы.
[0033] Отметим, что диапазон длин волн в спектральном изображении, фотографируемом устройством 4 захвата спектральных изображений, включает в себя инфракрасный диапазон, ближний инфракрасный диапазон и ультрафиолетовый диапазон, а также диапазон видимого света.
[0034] Устройство 4 захвата спектральных изображений включает в себя объектив 41, который захватывает свет, излученный самим фотографическим объектом, или свет, отражающийся от предмета 10 либо проходящий через него, то есть фотографический свет L от предмета 10, платформу 42 точного линейного движения, которая движется в направлении оси Y в декартовой системе координат с осями X, Y и Z, пластину 43 с щелью для организации щелевого отверстия 43a, предоставленного в направлении оси Z на плоскости изображения у объектива 41, коллиматор 44 для коллимирования лучей света, проходящих через щелевое отверстие 43a, дисперсионный оптический элемент 45, который диспергирует коллимированный свет от коллиматора 44, изображающую линзу 46, которая захватывает лучи света, излученные из дисперсионного оптического элемента 45, элемент 47 захвата изображений, предоставленный в плоскости изображения у изображающей линзы 46, и блок 48 управления, который управляет платформой 42 точного линейного движения и элементом 47 захвата изображений для выполнения различных обработок для данных изображения, принятых через элемент 47 захвата изображений. Отметим, что устройство 4 захвата спектральных изображений можно предоставить с использованием раскрытой в JP-A-2015-166682 методики.
[0035] Платформа 42 точного линейного движения под управлением блока 48 управления перемещает как одно целое пластину 43 с щелью, коллиматор 44, дисперсионный оптический элемент 45, изображающую линзу 46 и элемент 47 захвата изображений в направлении оси Y.
[0036] Дисперсионный оптический элемент 45 реализуется, например, с использованием дифракционных решеток, призмы и т.п. Дисперсионный оптический элемент обладает функцией диспергирования лучей света, проходящих через коллиматор 44, на основе волновой составляющей.
[0037] Элемент 47 захвата изображений включает в себя, например, датчик изображений на ПЗС, датчик изображений на КМОП или т.п. Элемент 47 захвата изображений преобразует свет, фокусируемый на плоскости изображения, в электрический сигнал посредством электрооптического преобразования. К тому же электрический сигнал, преобразованный элементом 47 захвата изображений, передается в блок 48 управления. Подходящий элемент 47 захвата изображений выполнен с возможностью соответствия инфракрасному, ближнему инфракрасному или ультрафиолетовому излучению в зависимости от принятого света.
[0038] Фиг. 4 подробнее иллюстрирует конфигурацию блока 48 управления. Блок 48 управления включает в себя блок 481 управления фотографированием, который управляет распределением времени для получения электрического сигнала в элементе 47 захвата изображений, блок 482 управления перемещением, который управляет направлением сдвига, величиной сдвига и распределением сдвига во времени у платформы 42 точного линейного движения в направлении оси Y, блок 483 создания спектральных данных, который создает спектральные данные на основе электрического сигнала от элемента 47 захвата изображений, и блок 484 обработки изображений, который выполняет различные обработки или коррекции изображений на основе спектральных данных, созданных блоком 483 создания спектральных данных. Отметим, что часть или все элементы блока 48 управления также можно встраивать в независимый персональный компьютер (ПК).
[0039] Блок 483 создания спектральных данных на основе электрического сигнала, переданного от элемента 47 захвата изображений, создает двумерные спектральные данные, содержащие одномерную пространственную информацию и одномерную информацию о длине волны, и сохраняет их. Блок 483 создания спектральных данных путем повторного исполнения этой обработки может получить гиперспектральное изображение, состоящее из трехмерных спектральных данных, включающих в себя двумерную пространственную информацию и одномерную информацию о длине волны, когда операция фотографирования завершается для всех местоположений фотографирования.
[0040] Блок 484 обработки изображений преобразует спектральное изображение на основе длины волны, созданное блоком 483 создания спектральных данных, в заранее установленную цветовую систему и выполняет процесс работы с цветами, чтобы создать изображение цветового анализа. К тому же блок 484 обработки изображений выполняет обработку для отображения созданного изображения цветового анализа на основе заранее установленного способа отображения. Блок 484 обработки изображений включает в себя блок 484-1 корректирующей обработки, блок 484-2 вычисления и блок 484-3 получения изображения цветового анализа.
[0041] Блок 484-1 корректирующей обработки выполняет подавление шума, вызванного темновыми токами, коррекцию разницы чувствительности между пикселями, коррекцию яркости, коррекцию неравномерности освещения источником света в пространстве и т.п.
[0042] Блок 484-2 вычисления вычисляет каждую спектральную плотность энергетической яркости, каждую спектральную светимость и т.п. у каждого спектрального изображения на основе длины волны, обработанного блоком 484-1 корректирующей обработки.
[0043] Блок 484-3 получения изображения цветового анализа выполняет преобразование цветового пространства для преобразования спектрального изображения в цветовую систему, удовлетворяющую стандарту, заданному с использованием различных параметров, скорректированных блоком 484-1 корректирующей обработки, и каждой спектральной плотности энергетической яркости и каждой спектральной светимости, вычисленных блоком 484-2 вычисления, и т.п.
[0044] В блоке 484-3 получения изображения цветового анализа изображение цветового анализа, подвергнутое преобразованию цветового пространства, передается в ПК или т.п. (не показано) и визуализируется на дисплее или т.п.
[0045] Фиг. 5 иллюстрирует примерную структурную конфигурацию фотографирующего устройства 5. Фотографирующее устройство 5 включает в себя типичную цифровую камеру, многоспектральную камеру или любой тип цифровой камеры, установленной в мобильном телефоне, смартфоне, планшетном терминале и носимом терминале. Тогда как устройство 4 захвата спектральных изображений может обнаруживать спектральные данные во всех диапазонах длин волн, фотографирующее устройство 5 предназначено для ограничивающего обнаружения спектральных данных в конкретной области длин волн, заданной заранее, в дополнение к фотографированию изображений для типичного видимого диапазона. Фотографирующее устройство 5 включает в себя оптическую систему 51 формирования изображения, фильтр 52, элемент 53 захвата изображений и блок 54 обработки сигналов.
[0046] Оптическая система 51 формирования изображения содержит по меньшей мере одну линзу 56 захвата изображений для уплотнения света от предмета 10, чтобы создать изображение в плоскости изображения у элемента 53 захвата изображений.
[0047] Фильтр 52 размещается между предметом 10 и линзой 56 захвата изображений. Фильтр 52 размещается посередине оптического пути к элементу 53 захвата изображений. Фильтр 52 является элементом с заранее установленным коэффициентом спектрального пропускания. То есть фильтр 52 пропускает только свет, принадлежащий заранее установленной области длин волн, и отражает свет из других областей длин волн. Тип фильтра 52 выбирается в зависимости от длины волны света, пропускаемого на практике, и полосы пропускания. Хотя в этом примере предполагается, что фильтр 52 заранее закрепляется в фотографирующем устройстве 5, изобретение этим не ограничивается. То есть фильтр 52 может конфигурироваться так, что последовательно переключается множество фильтров 52 с разными областями длин волн пропускания.
[0048] Элемент 53 захвата изображений включает в себя датчик изображений на ПЗС, датчик изображений на КМОП или т.п. Элемент 53 захвата изображений преобразует свет, фокусируемый на плоскости изображения, в электрический сигнал посредством фотоэлектрического преобразования. К тому же электрический сигнал, преобразованный элементом 53 захвата изображений, передается в блок 54 обработки сигналов.
[0049] Блок 54 обработки сигналов является схемой для обработки электрического сигнала, переданного из элемента 53 захвата изображений. Блок 54 обработки сигналов создает изображение со спектральным разделением, разделенное для каждой области длин волн света от предмета 10, на основе изображения, полученного элементом 53 захвата изображений. К тому же блок 54 обработки сигналов может выполнять различные операции управления фокальной точкой на основе полученного электрического сигнала.
[0050] Сейчас будут описываться операции системы 1 поиска информации с вышеупомянутой конфигурацией в соответствии с первым вариантом осуществления.
[0051] Сначала устройство 2 поиска ищет информацию алгоритма обнаружения, которую нужно предоставить устройству 4 захвата спектральных изображений или фотографирующему устройству 5, или информацию алгоритма обнаружения, которую нужно предоставить фотографирующему устройству 5. Этот процесс поиска начинается, когда пользователь вводит целевой результат в предмете, который нужно сфотографировать вновь с помощью устройства 4 захвата спектральных изображений или фотографирующего устройства 5. Здесь "предмет" является обобщающим термином, относящимся к объекту, фактически фотографируемому устройством 4 захвата спектральных изображений или фотографирующим устройством 5, а "целевой результат" относится к объекту или действию, который (которое) нужно определить с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5. Например, предполагая, что нужно определить только соль из смеси соли и сахара, предметом является смесь, а целевым результатом является соль. Например, предполагая, что нужно определить только масло из смеси воды и масла, предметом является смесь, а целевым результатом является масло. Например, предполагая, что нужно определить свежесть суши, предметом является суши, а целевым результатом является свежесть. Например, предполагая, что нужно определить пятно на лице, предметом является лицо, а целевым результатом является пятно. Например, предполагая, что нужно определить рак желудка в желудке, предметом является желудок, а целевым результатом является рак желудка.
[0052] Пользователь вручную вводит целевой результат в предмете с использованием манипуляционного блока 25. В этой операции ввода текстовые данные о целевом результате в предмете, созданные другим электронным устройством, например мобильным терминалом или ПК, также можно вводить через Интернет.
[0053] Переданный или введенный таким образом целевой результат в предмете сохраняется в запоминающем устройстве 28.
[0054] После того, как таким образом вводится целевой результат в предмете, фактически исполняется операция обработки с использованием программы поиска информации. На фиг. 6 иллюстрируется алгоритм операции обработки в программе поиска информации.
[0055] Программа поиска информации выполняет анализ текста на целевой результат в предмете, введенный на этапе S11 и сохраненный в запоминающем устройстве 28 (этап S12). В этом анализе текста может применяться любая из существующих методик, например методика глубинного анализа текста, методика извлечения информации и методика анализа естественного языка.
[0056] Затем программа поиска информации извлекает из целевого результата в предмете, который нужно анализировать, строку символов по одной или нескольким единицам из всех грамматических структурных единиц, например слов, морфем, фраз и предложений. Например, предполагая, что в качестве целевого результата в предмете вводятся текстовые данные "кровеносный сосуд ноги", извлекаются строки символов "нога" и "кровеносный сосуд". Например, предполагая, что вводятся текстовые данные "увлажнение лица", извлекаются строки символов "лицо" и " увлажнение". Программа поиска информации задает предмет и целевой результат из извлеченных строк символов. В вышеупомянутом примере "нога" и "лицо" извлекаются в качестве предмета, а "кровеносный сосуд" и " увлажнение" извлекаются в качестве целевого результата. Как правило, во многих случаях строка символов предмета располагается перед строкой символов целевого результата. Поэтому предмет и целевой результат задаются, начиная с заголовка извлеченной строки символов.
[0057] В качестве альтернативы пользователь может отдельно ввести заранее предмет и целевой результат, например, путем задания "ноги" в качестве предмета и задания "кровеносного сосуда" в качестве целевого результата. В этом случае непосредственно принимаются введенные строки символов предмета и целевого результата.
[0058] Затем программа поиска информации переходит к этапу S13 и ищет информацию алгоритма обнаружения с высоким индексом релевантности по строке символов, извлеченной на этапе S12. Перед этой операцией поиска база 3 данных алгоритмов заранее получает целевой результат для сведения (в дальнейшем называется "базовым целевым результатом") и индекс релевантности с тремя или более уровнями информации алгоритма обнаружения, обладающий двумя или более классификациями (в дальнейшем называемый "первым индексом релевантности").
[0059] Здесь "информация алгоритма обнаружения" относится к алгоритму для обнаружения спектральных данных, необходимых для определения целевого результата, путем фактического фотографирования предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5. Например, как проиллюстрировано на фиг. 7, предполагается, что уже известно, что спектральная интенсивность (отражательная способность) в диапазоне длин волн от 500 нм до 700 нм отличается в зависимости от свежести некоторого фрукта. То есть известно, что спектральная интенсивность (отражательная способность) резко меняется на диапазоне длин волн от 500 нм до 700 нм, когда любой фрукт помещается на один день, на три дня и на пять дней при комнатной температуре. В этом случае можно определить свежесть фрукта путем создания спектрального изображения в диапазоне длин волн от 500 нм до 700 нм.
[0060] Любая длина волны из диапазона длин волн, в которой можно определить целевой результат, задается в качестве характерной длины волны. В примере из фиг. 7 любая длина волны из диапазона длин волн от 500 нм до 700 нм задается в качестве характерной длины волны. Можно задать одну характерную длину волны или множество характерных длин волн. В качестве способа указания характерной длины волны может выбираться, например, центральная длина волны в 600 нм в диапазоне длин волн (от 500 нм до 700 нм) либо длина волны, при которой разница спектральной интенсивности между спектрами наибольшая. К тому же, хотя на фиг. 7 очевидно, что пик в каждых спектральных данных образуется при длине волны приблизительно в 650 нм, такая характерная точка также может быть задана в качестве характерной длины волны. Эта характерная длина волны также может отличаться в зависимости от каждого целевого результата в предмете.
[0061] К тому же путем центрирования этой характерной длины волны устанавливается диапазон характерных длин волн. Диапазон характерных длин волн устанавливается в заранее установленный диапазон длин волн, например ±10 нм. По этой причине, если характерная длина волны устанавливается в 500 нм, а диапазон характерных длин волн устанавливается в ±10 нм, то диапазон для фактического обнаружения спектральных данных становится равным 495-505 нм. Этот диапазон характерных длин волн может отличаться в зависимости от каждого целевого результата в предмете.
[0062] К тому же информация алгоритма обнаружения может включать в себя различные способы вычисления. В этом случае характерная длина волны или диапазон характерных длин волн устанавливается как объясняющая (независимая) переменная x1, x2, …, xk, а определение выполняется с использованием зависимой переменной y, полученной путем применения поясняющей переменной к формуле вычисления. То есть зависимая переменная "y", полученная из "y=f(x1, x2, …, xk)", становится информацией алгоритма обнаружения. Аналогично характерной длине волны или диапазону характерных длин волн, отдельные включенные туда объясняющие переменные x1, x2, …, xk также являются информацией алгоритма обнаружения.
[0063] База 3 данных алгоритмов хранит характерную длину волны, диапазон характерных длин волн и способ вычисления либо формулу вычисления по необходимости для каждого базового целевого результата в предмете совместно друг с другом.
[0064] В этом случае база 3 данных алгоритмов может задаваться на основе первого индекса релевантности с тремя или более уровнями между базовым целевым результатом в предмете и информацией алгоритма обнаружения. Фиг. 8 иллюстрирует сеть, в которой базовый целевой результат в предмете и информация алгоритма обнаружения ассоциируются друг с другом с использованием первого индекса релевантности с тремя или более уровнями. Например, свежесть фрукта имеет первый индекс релевантности в 80% для случая, где характерная длина волны и диапазон характерных длин волн в качестве информации алгоритма обнаружения устанавливаются в "970±10 нм", имеет первый индекс релевантности в 60% для случая двух длин волн, включающих "1170±10 нм" и "880±15 нм", имеет первый индекс релевантности в 40% для случая, где три длины волн, включающие "547±4 нм", "588±10 нм", "939±5 нм", устанавливаются в качестве информации алгоритма обнаружения, и способ вычисления устанавливается в виде кластерного анализа и имеет первый индекс релевантности в 20% для случая "455±12 нм". Влажность волос имеет первый индекс релевантности в 80% для случая, где характерная длина волны и диапазон характерных длин волн в качестве информации алгоритма обнаружения устанавливаются в три длины волн, включающие "630±5 нм", "750±10 нм", "1250±5 нм", и способ вычисления устанавливается как "линейный" и имеет первый индекс релевантности в 20% для случая "970±10 нм". Рак желудка имеет первый индекс релевантности в 20% для случая, где характерная длина волны и диапазон характерных длин волн в качестве информации алгоритма обнаружения устанавливаются в "970±10 нм", имеет первый индекс релевантности в 40% для случая, где информация алгоритма обнаружения устанавливается в две длины волн, включающие "230±12 нм" и "400±5 нм", и способ вычисления устанавливается в "k-средние", и имеет первый индекс релевантности в 80% для случая, где информация алгоритма обнаружения устанавливается в три длины волн, включающие "547±4 нм", "588±10 нм" и "939±5 нм", а способ вычисления устанавливается в "кластерный анализ". Для задания первого индекса релевантности также может применяться так называемая нейронная сеть.
[0065] Первый индекс релевантности представляет собой сходство информации алгоритма обнаружения, выбранной для определения целевого результата в предмете с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5, другими словами - точность информации алгоритма обнаружения, выбранной для определения целевого результата в предмете. В вышеупомянутом примере сходство наилучшее, когда алгоритм обнаружения для обнаружения свежести фрукта устанавливается в "970±10 нм". Это означает, что определение может выполняться с наивысшей эффективностью и точностью. При обнаружении свежести фрукта уровень сходства устанавливается последовательно в порядке случая с двумя длинами волн, включающими "1170±10 нм" и "880±15 нм", случая, где информация алгоритма обнаружения устанавливается в три длины волн, включающие "547±4 нм", "588±10 нм" и "939±5 нм", а способ вычисления устанавливается в "кластерный анализ", и случая "455±12 нм".
[0066] Способ записи целевого результата в предмете не ограничивается вышеупомянутым. Например, как проиллюстрировано на фиг. 9, ассоциация с использованием первого индекса релевантности выполняется, даже когда предметом является композиционный материал, образованный из двух или более материалов. В примере из фиг. 9 композиционный материал, образованный вставкой пластмассы между стеклянными пластинами, устанавливается в качестве предмета, а дефект в пластмассе устанавливается в качестве базового целевого результата. Этот композиционный материал может включать в себя многослойную деталь, образованную путем наслаивания, например, множества металлических слоев и смоляных слоев, или смесь, образованную путем смешивания разных материалов, например сахара и соли. В качестве альтернативы композиционный материал может включать в себя единую деталь, например композиционный материал на керамике, полученный путем использования керамики в качестве основного материала и добавления нитей в качестве второго слоя.
[0067] В качестве альтернативы в качестве базового целевого результата можно задать инородное вещество, содержащееся в композиционном материале, состоящем из металла и инородного вещества. В этом примере один из элементов композиционного материала устанавливается как базовый целевой результат. В качестве альтернативы предмет может включать в себя композиционный материал, состоящий из трех или более материалов, например стекла, пластмассы и керамики. Для каждого из этих композиционных материалов задается базовый целевой результат.
[0068] Даже когда предмет образован таким образом из композиционного материала, информация алгоритма обнаружения ассоциируется с использованием индекса релевантности с тремя или более уровнями. Если предмет образован из композиционного материала, содержащего металл и инородное вещество, то характерная длина волны инородного вещества в дополнение к характерной длине волны металла также рассматривается как характерная длина волны в информации алгоритма обнаружения, и эта характерная длина волны ассоциируется с использованием индекса релевантности путем изучения заранее условия, подходящего для извлечения базового целевого результата из предмета.
[0069] В примере, в котором предмет образован из композиционного материала, например, металла в состоянии со смешанными кристаллами, мартенситное превращение можно установить в качестве предмета, а отдельную фазу можно установить в качестве базового целевого результата. К тому же в случае, где сам предмет образуется из однофазового материала вместо композиционного материала, но однофазовый материал меняется последовательно, измененную фазу можно установить в качестве базового целевого результата.
[0070] После этапа S13 программа поиска информации выбирает информацию алгоритма обнаружения один или несколько раз из строк символов, включенных в целевой результат в предмете, извлеченный на этапе S12.
[0071] Когда информация алгоритма обнаружения выбирается из строки символов, включенной в целевой результат в предмете, извлеченный на этапе S12, обращаются к первому индексу релевантности между базовым целевым результатом в предмете и информацией алгоритма обнаружения, полученному заранее с фиг. 8. Например, в случае, где целевым результатом в предмете, извлеченным на этапе S12, является "фотосинтез листвы", и обращаются к описанному выше первому индексу релевантности, в качестве информации алгоритма обнаружения выбирается "1357±10 нм" с высоким первым индексом релевантности у "фотосинтеза листвы". Случай "630±5 нм, 750±10 нм и 1250±5 нм" и "линейный" в качестве способа вычисления, где первый индекс релевантности низкий, но сама релевантность подтверждается, также можно выбрать в качестве информации алгоритма обнаружения. В качестве альтернативы также можно выбрать другие порции информации алгоритма обнаружения, с которыми не связана никакая стрелка.
[0072] В случае, где целевым результатом в предмете, извлеченным на этапе S12, является "влажность листвы", не существует такого элемента в качестве базового целевого результата в предмете. В этом случае оптимальную информацию алгоритма обнаружения можно оценить из любого из случая "1357±10 нм" с высоким первым индексом релевантности у "фотосинтеза листвы" в качестве базового целевого результата в предмете, случая "630±5 нм, 750±10 нм, 1250±5 нм" и "линейного" в качестве способа вычисления, случая "630±5 нм, 750±10 нм, 1250±5 нм" с высоким первым индексом релевантности у "влажности волос" и "линейного" в качестве способа вычисления, и случая "970±10 нм". В этом случае, например, обычный первый индекс релевантности "630±5 нм" можно оценить как информацию алгоритма обнаружения у "влажности листвы", или все характерные длины волн с первым индексом релевантности в 40% или выше из ассоциированных с "фотосинтезом листвы" и "влажностью волос" можно оценить как информацию алгоритма обнаружения. К тому же длину волны, полученную путем взвешенного усреднения всех алгоритмов обнаружения с первым индексом релевантности в 0% или выше у "фотосинтеза листвы" и "влажности волос", используя соответствующие первые индексы релевантности, можно оценить как информацию алгоритма обнаружения.
[0073] Когда целевым результатом в предмете, извлеченным на этапе S12, является "рак языка", не существует такого элемента в базовом целевом результате в предмете. Хотя "рак желудка" существует как прошлый целевой результат в предмете касательно "рака", отсутствует базовый целевой результат в предмете касательно "языка". В этом случае оценка может выполняться на основе прошлой информации алгоритма обнаружения "рака желудка". Если есть прошлая информация алгоритма обнаружения касательно "губы" или т.п., которая близка к "языку", то оценка может выполняться на основе прошлой информации алгоритма обнаружения.
[0074] В случае, где извлеченным на этапе S12 предметом является смесь сахара и соли, а извлеченным целевым результатом является "соль", случай "230±12 нм, 400±5 нм" в качестве длины волны и "k-средних" в качестве способа вычисления предпочтительно выбирается в качестве информации алгоритма обнаружения путем обращения к первым индексам релевантности из фиг. 9.
[0075] В случае, где извлеченным на этапе S12 предметом является, например, "бумага", а извлеченным целевым результатом является "инородное вещество", отсутствует предмет, подходящий этому случаю, даже путем обращения к первым индексам релевантности из фиг. 8 и 9. Однако "инородное вещество" в качестве базового целевого результата существует в случае смеси "металла" и "инородного вещества" в качестве предмета. В этом случае также можно выбрать информацию алгоритма обнаружения с низким первым индексом релевантности для случая, где смесь "металла" и "инородного вещества" устанавливается в качестве предмета, а "инородное вещество" устанавливается в качестве базового целевого результата.
[0076] То есть выбор информации алгоритма обнаружения не ограничивается убывающим порядком, при котором с большим приоритетом выбирается более высокий первый индекс релевантности. Вместо этого возможен возрастающий порядок, при котором с большим приоритетом выбирается более низкий первый индекс релевантности. В качестве альтернативы также может применяться любой другой способ выбора на основе приоритета.
[0077] Способ выбора информации алгоритма обнаружения для целевого результата в предмете, извлеченного на этапе S12, не ограничивается вышеупомянутым способом. Вместо этого может применяться любой другой способ при условии, что он обращается к первому индексу релевантности. К тому же операция поиска из этапа S13 может выполняться с использованием искусственного интеллекта. В этом случае первый индекс релевантности можно рассматривать как нейронную сеть.
[0078] Затем процесс переходит к этапу S14, и выбранная информация алгоритма обнаружения отображается с использованием блока 23 отображения. В результате пользователь может немедленно идентифицировать информацию алгоритма обнаружения в зависимости от целевого результата в предмете, который нужно определить, путем визуального наблюдения блока 23 отображения.
[0079] Пользователь настраивает алгоритм обнаружения в блоке 484 обработки изображений в устройстве 4 захвата спектральных изображений или алгоритм обнаружения в фотографирующем устройстве 5 на основе выведенной информации алгоритма обнаружения. При этой настройке алгоритма обнаружения процесс работы с цветами (в дальнейшем называемый "вычислением характерной длины волны") на основе характерной длины волны выполняется в дополнение к характерной длине волны и диапазону характерных длин волн. Например, в случае, где целевым результатом в предмете является "фотосинтез листвы", и "1357±10 нм" выбирается в качестве алгоритма обнаружения, устройство 4 захвата спектральных изображений или фотографирующее устройство 5 настраивается так, что вычисление характерной длины волны для отображения красного выполняется для пикселей, включенных в этот диапазон длин волн, и вычисление характерной длины волны для отображения белого выполняется для пикселя, не включенного в эту длину волны.
[0080] В результате путем фотографирования "листвы" в качестве предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5 можно обнаружить спектральные данные, необходимые для определения "фотосинтеза" в качестве целевого результата, и отобразить их с использованием изображения цветового анализа.
[0081] В частности, в соответствии с настоящим изобретением можно легко получить оптимальную информацию алгоритма обнаружения в спектральных данных в зависимости от целевого результата в предмете, который нужно определить, с помощью устройства 4 захвата спектральных изображений или фотографирующего устройства 5. Можно уменьшить трудовые затраты для изучения оптимального алгоритма обнаружения и сократить, таким образом, время, когда в предмете последовательно формируется новый целевой результат.
[0082] Система 1 поиска информации в соответствии с настоящим изобретением отличается тем, что оптимальную информацию алгоритма обнаружения ищут с использованием первого индекса релевантности, заданного на трех или более уровнях. Первый индекс релевантности может описываться, например, с использованием численного значения от 0 до 100%. Однако изобретение этим не ограничивается. Первый индекс релевантности может описываться любым количеством уровней при условии, что его можно описать с использованием числового значения с тремя или более уровнями.
[0083] Поскольку операция поиска выполняется на основе первого индекса релевантности, выраженного таким образом численным значением с тремя или более уровнями, информацию алгоритма обнаружения можно искать и отображать в убывающем порядке первого индекса релевантности, когда выбирается множество порций информации алгоритма обнаружения. Если информация алгоритма обнаружения отображается для пользователя в убывающем порядке первого индекса релевантности, то пользователя можно побудить выбрать с большим приоритетом информацию алгоритма обнаружения, обладающую большей вероятностью. Между тем даже информация алгоритма обнаружения с более низким первым индексом релевантности может отображаться как еще одно мнение. Это полезно, когда анализ с использованием первого мнения непростой.
[0084] К тому же в соответствии с настоящим изобретением можно без потери определить информацию алгоритма обнаружения с существенно низким первым индексом релевантности, например 1%. Поэтому можно позволить пользователю обратить внимание на то, что даже информация алгоритма обнаружения с существенно низким первым индексом релевантности связана с незначительным указанием и может быть полезна как информация алгоритма обнаружения один раз из нескольких десятков или сотен раз.
[0085] В соответствии с настоящим изобретением можно выбрать стратегию поиска преимущественно путем задания порогового значения, поскольку операция поиска выполняется таким образом на основе первого индекса релевантности с тремя или более уровнями. Если пороговое значение устанавливается ниже, то можно без потери обнаружить информацию алгоритма обнаружения, даже когда описанный выше первый индекс релевантности равен 1%. Однако в некоторых случаях может часто выбираться информация алгоритма обнаружения с низкой вероятностью надлежащего обнаружения целевого результата в предмете. Что же касается ситуации, если пороговое значение устанавливается выше, то можно сузить только информацию алгоритма обнаружения с высокой вероятностью надлежащего обнаружения целевого результата в предмете. Однако в некоторых случаях можно пропустить условие фотографирования, которое может подходить один раз из нескольких десятков или сотен раз. Чему придать значение - можно решить с точки зрения пользователя или системы. Однако можно повысить степень свободы для выбора такой точки акцента.
[0086] В соответствии с настоящим изобретением может обновляться описанный выше первый индекс релевантности. То есть по необходимости обновляются базовый целевой результат в предмете и информация алгоритма обнаружения, проиллюстрированные на фиг. 8. Это обновление может выполняться для отражения информации, предоставленной по общедоступной сети связи, например Интернет. Когда найдены новые сведения о взаимосвязи между базовым целевым результатом в предмете и информацией алгоритма обнаружения посредством информации с сайтов или работ, доступных из общедоступной сети связи, первый индекс релевантности увеличивается или уменьшается в зависимости от тех сведений. Например, когда на сайтах общедоступной сети связи много раз упоминается, что алгоритм обнаружения с некоторым уровнем первого индекса релевантности для некоторого базового целевого результата в предмете может с высокой точностью обнаруживать целевой результат, дополнительно увеличивается установленный между ними первый индекс релевантности. К тому же, когда на сайтах общедоступной сети связи много раз упоминается, что алгоритм обнаружения с некоторым уровнем первого индекса релевантности для некоторого базового целевого результата в предмете не обнаруживает правильно с высокой точностью целевой результат, уменьшается установленный между ними первый индекс релевантности. К тому же, когда на сайтах общедоступной сети связи упоминается, что некоторый базовый целевой результат в предмете можно обнаружить с высокой точностью, используя алгоритм обнаружения, который не существовал до настоящего времени, обновление может выполняться путем задания нового первого индекса релевантности между ними.
[0087] Первый индекс релевантности может обновляться на основе информации, доступной из общедоступной сети связи. К тому же обновление может выполняться искусственно или автоматически системой либо пользователем на основе содержимого данных исследований, документов, докладов конференций, статей в газетах, книг или т.п. с помощью экспертов. При этой обновляющей обработке также может использоваться искусственный интеллект.
[0088] Отметим, что первый вариант осуществления не ограничивается вышеупомянутыми примерами. Информацию алгоритма обнаружения можно искать путем ввода целевого результата в предмете, описанной выше информации об освещении, различных параметров системы формирования изображения и параметров аппаратных средств в качестве информации, которую нужно вводить на этапе S11.
[0089] Устройство 2 поиска может искать условие фотографирования, которое нужно предоставить фотографирующему устройству 5. Программа поиска информации ищет условие фотографирования с высоким индексом релевантности у полученного целевого результата. Перед этим поиском база 3 данных алгоритмов заранее получает первый индекс релевантности между базовым целевым результатом и условием фотографирования, как проиллюстрировано на фиг. 10.
[0090] Здесь "условие фотографирования" включает в себя информацию об освещении, например длину волны, угол освещения и яркость освещения, используемую при фотографировании в устройстве 4 захвата спектральных изображений или фотографирующем устройстве 5, и состояние поляризационного фильтра, предусмотренного в освещении, и различные параметры системы формирования изображения или аппаратных средств, например диафрагменное число у устройства 4 захвата спектральных изображений или фотографирующего устройства 5, числовую апертуру (NA) и фокусное расстояние линзы, модель использования, спектральное разрешение, пространственное разрешение, чувствительность к каждой спектральной длине волны, время экспозиции, время автофокусировки, скорость затвора, тип затвора, баланс белого, баланс черного, увеличение и т.п. Каждый описанный выше параметр может добавляться в информацию алгоритма обнаружения в дополнение к описанным выше характерной длине волны, диапазону характерных длин волн и способу вычисления. Кроме того, каждый описанный выше параметр может задаваться в качестве условия для получения описанной выше характерной длины волны или диапазона характерных длин волн.
[0091] Когда такие различные условия фотографирования ассоциируются с использованием первых индексов релевантности, спектральное разрешение можно ранжировать на несколько групп, например "от 96 до 120 dpi", "от 120 до 144 dpi" и "от 144 до 192 dpi", и с каждым рангом можно ассоциировать первый индекс релевантности.
[0092] Например, задается такое условие фотографирования, как "баланс белого XX", сочетание "компоновки P линз" и "фильтра W", "фильтра Q", сочетание "фильтра R" и "угла освещения XX°", сочетание "фильтра S" и "пространственного разрешения 133-140 dpi", "времени экспозиции XX нс или больше", "времени экспозиции короче XX нс" или т.п., как проиллюстрировано на фиг. 10.
[0093] Условие фотографирования может включать в себя множество факторов в сочетании или может включать в себя один фактор. Условие фотографирования, например "время экспозиции", можно классифицировать на "время экспозиции XX нс или больше" и "время экспозиции короче XX нс", а затем с каждым из факторов можно ассоциировать второй индекс релевантности. Кроме того, каждому фактору можно назначить определенное условие. Например, "фильтр Q" может обладать длиной волны пропускания фильтра от 600 до 650 нм или т.п. Например, "фильтр R" может обладать длиной волны пропускания фильтра от 340 до 400 нм или т.п. Например, "фильтр S" может обладать длиной волны пропускания фильтра от 1000 до 1100 нм или т.п.
[0094] Базовый целевой результат в предмете и условие фотографирования ассоциируются друг с другом с использованием первого индекса релевантности. Например, "свежесть фрукта" ассоциируется с "фильтром Q" с первым индексом релевантности в 80% и ассоциируется с "балансом белого XX" с первым индексом релевантности в 20%. "Влажность волос" ассоциируется с сочетанием "фильтра S" и "пространственного разрешения от 133 до 140 dpi" с первым индексом релевантности в 100% и ассоциируется с сочетанием "компоновки P линз" и "фильтра W" с первым индексом релевантности в 40%. "Фотосинтез листвы" ассоциируется с "балансом белого XX" с первым индексом релевантности в 60% и ассоциируется с "временем экспозиции короче XX нс" с первым индексом релевантности в 20%. "Рак желудка" ассоциируется с сочетанием "компоновки P линз" и "фильтра W" с первым индексом релевантности в 80% и ассоциируется с "фильтром S" и "пространственным разрешением от 133 до 140 dpi" с первым индексом релевантности в 40%. "Дефект стекла" ассоциируется с "фильтром R, углом освещения XX°" с первым индексом релевантности в 100% и ассоциируется с "временем экспозиции XX нс или больше" с первым индексом релевантности в 20%.
[0095] Первый индекс релевантности относится к сходству условия фотографирования у фотографирующего устройства 5 при определении на основе каждого базового целевого результата. Другими словами, первый индекс релевантности указывает точность исполнения или способа фотографирования у фотографирующего устройства 5 для базового целевого результата и, дополнительно, целевого результата в предмете, определенного с его использованием. В вышеупомянутом примере сочетание "компоновки P линз" и "фильтра W" обладает наилучшим сходством в качестве условия фотографирования для "рака желудка" и дополнительно указывает, что можно выполнить определение с наивысшей эффективностью и точностью. Очевидно, что условие фотографирования для "рака желудка" связано с "фильтром S" и "пространственным разрешением от 133 до 140 dpi".
[0096] База 3 данных алгоритмов хранит каждое описанное выше условие фотографирования совместно с описанным выше базовым целевым результатом с использованием первого индекса релевантности.
[0097] Программа поиска информации может обращаться к первому индексу релевантности из фиг. 10, чтобы искать условие фотографирования, обладающее большим сходством с вновь введенным целевым результатом. Например, в случае, где вновь введенным целевым результатом является "влажность волос", и обращаются к описанным выше первым индексам релевантности, в качестве условия фотографирования выбираются соответствующие им "фильтр S" и "пространственное разрешение от 133 до 140 dpi" с высоким первым индексом релевантности у базовой информации алгоритма обнаружения. В качестве условия фотографирования также можно выбрать сочетание "компоновки P линз" и "фильтра W", где первый индекс релевантности низкий, но сама релевантность подтверждается. Аналогичным образом, когда вновь введенным целевым результатом является "рак желудка", выбирается сочетание "компоновки P линз" и "фильтра W".
[0098] Аналогичным образом в варианте осуществления из фиг. 10 выбор условия фотографирования не ограничивается убывающим порядком, при котором с большим приоритетом выбирается более высокий первый индекс релевантности. Условие фотографирования может выбираться в возрастающем порядке, начиная с более низкого первого индекса релевантности в каждом отдельном случае, или также может применяться любой другой способ выбора на основе приоритета.
[0099] Фиг. 11 иллюстрирует пример, в котором условие фотографирования ассоциируется с сочетанием базового целевого результата и базового условия фотографирования с использованием первого индекса релевантности с тремя или более уровнями. Базовое условие фотографирования включает в себя те же элементы, что и в вышеупомянутом условии фотографирования. В первом индексе релевантности из фиг. 11 часть условий фотографирования в дополнение к целевому результату вводится в качестве известной информации, используя манипуляционный блок 25. То есть, хотя часть целевых результатов и условий фотографирования уже выбрана, сложно выбрать оставшиеся условия фотографирования. Поэтому операция поиска выполняется с использованием первого индекса релевантности.
[0100] Ссылаясь на фиг. 11, базовые целевые результаты или базовые условия фотографирования размещаются с левой стороны с использованием первого индекса релевантности, а условия фотографирования, которые нужно фактически найти, размещаются с правой стороны с использованием первого индекса релевантности.
[0101] В случае, где базовым целевым результатом устанавливается "свежесть фрукта", и базовое условие фотографирования устанавливается в "фильтр S", соответствующий их сочетанию узел обладает первым индексом релевантности в 70% при "балансе белого XX" и первым индексом релевантности в 40% при "времени экспозиции XX нс или больше". К тому же в случае, где базовым условием фотографирования устанавливается "фильтр S" и "скорость затвора XX секунд", а базовым целевым результатом является "фотосинтез листвы", соответствующий их сочетанию узел обладает первым индексом релевантности в 60% при "балансе белого XX" и обладает первым индексом релевантности в 40% при "времени экспозиции короче XX нс".
[0102] Если заранее сохраняются такие первые индексы релевантности, то можно искать условие фотографирования путем обращения к первому индексу релевантности, когда известный целевой результат и условие фотографирования вводятся через манипуляционный блок 25. Например, в случае, где "дефект стекла" вводится в качестве целевого результата через манипуляционный блок 25, и "угол освещения XX°" вводится в качестве условия фотографирования, соответствующим образом выбирается "компоновка линз", "фильтр S, пространственное разрешение от 133 до 140 dpi" или т.п. с индексом релевантности, заданным для соответствующего их сочетанию узла.
[0103] После их выбора программа поиска информации отображает выбранное условие фотографирования в блоке 23 отображения в устройстве 2 поиска. В результате пользователь, наблюдая блок 23 отображения, может немедленно распознать условие фотографирования в зависимости от информации алгоритма обнаружения. Аналогичным образом в такой операции поиска условия фотографирования также может применяться искусственный интеллект. То есть первый индекс релевантности может конфигурироваться с использованием нейронной сети.
[0104] Пользователь проектирует каждое из оптической системы 51 формирования изображения, фильтра 52, элемента 53 захвата изображений, блока 54 обработки сигналов и т.п. в фотографирующем устройстве 5 на основе выведенного условия фотографирования, задает условие освещения или выбирает различные условия касательно фотографирования. К тому же пользователь проектирует каждую конфигурацию устройства 4 захвата спектральных изображений или выбирает каждое условие на основе выведенного условия фотографирования.
[0105] В ходе ввода известного условия фотографирования известное условие фотографирования может, например, автоматически извлекаться вместо его ввода с использованием манипуляционного блока 25. Средство для извлечения условия фотографирования может быть, например, устройством, допускающим считывание электронных данных или информации, раскрытых в Интернете касательно руководств к применяемым устройствам 4 и 5 фотографирования, с использованием технологии глубинного анализа текста и их анализом, или может включать в себя ПК или т.п. Информацию об условии фотографирования можно извлечь из анализируемой информации и можно ввести в качестве описанного выше известного условия фотографирования. К тому же в случае, где время экспозиции извлекается в качестве известного условия фотографирования, может использоваться устройство для измерения фактического времени экспозиции у устройств 4 и 5 фотографирования, либо устройства 4 и 5 фотографирования можно подключить напрямую к ПК для считывания заданного времени экспозиции.
[0106] Фиг. 12 иллюстрирует пример, в котором информация алгоритма обнаружения или сочетание информации алгоритма обнаружения и условия фотографирования ассоциируется с сочетанием базового целевого результата и базового условия фотографирования с использованием первого индекса релевантности с тремя или более уровнями. Первые индексы релевантности из фиг. 12 являются примерами для случая, где часть условий фотографирования вводится в качестве известной информации в дополнение к целевому результату с использованием манипуляционного блока 25. То есть, поскольку часть целевых результатов и условий фотографирования уже выбраны, а оставшиеся условия фотографирования и информация алгоритма обнаружения не выбраны, их ищут с использованием первого индекса релевантности.
[0107] Ссылаясь на фиг. 12, базовые целевые результаты или базовые условия фотографирования размещаются с левой стороны с использованием первых индексов релевантности, а информация алгоритма обнаружения, которую нужно фактически найти, или сочетания условия фотографирования и информации алгоритма размещаются с правой стороны с использованием первых индексов релевантности.
[0108] В случае, где базовым целевым результатом устанавливается "свежесть фрукта", и базовое условие фотографирования устанавливается в "угол освещения от 30 до 60°", соответствующий их сочетанию узел обладает первым индексом релевантности в 60% при "630±5 нм, элемент T захвата изображений, угол освещения XX°" и обладает первым индексом релевантности в 40% при "970±10 нм, 900±5 нм, кластерный анализ". В случае, где базовым целевым результатом устанавливается "фотосинтез листвы", и базовое условие фотографирования устанавливается в "пространственное разрешение 120, угол освещения от 30 до 60°", соответствующий их сочетанию узел обладает первым индексом релевантности в 80% при "275±12 нм, фильтр R" и первым индексом релевантности в 20% при "1357±10 нм".
[0109] В случае, где заранее сохраняются такие первые индексы релевантности, можно искать условие фотографирования путем обращения к первому индексу релевантности, когда известный целевой результат и условие фотографирования вводятся через манипуляционный блок 25. Например, в случае, где целевым результатом, введенным через манипуляционный блок 25, является "свежесть фрукта", и введенным условием фотографирования является "угол освещения от 30 до 60°", соответствующим образом выбирается информация с индексами релевантности у соответствующего их сочетанию узла, например "630±5 нм, элемент T захвата изображений, угол освещения XX°" и "970±10 нм, 900±5 нм, кластерный анализ".
[0110] Фиг. 13 иллюстрирует поток данных, начиная с ввода целевого результата в предмете, и пока не получено условие фотографирования у фотографирующего устройства 5.
[0111] Входная информация включает в себя, в дополнение к целевому результату в предмете, параметры осветительной системы, например длину волны освещения, угол освещения, излучаемого на предмет, и яркость освещения, параметры системы формирования изображения, например диапазон длин волн у устройства 4 захвата спектральных изображений или фотографирующего устройства 5, спектральное разрешение, пространственное разрешение, чувствительность к спектральным длинам волн и поляризационный фильтр, или т.п. К тому же могут вводиться параметры аппаратных средств. Информацию алгоритма обнаружения или условие фотографирования, например характерную длину волны или диапазон характерных длин волн, ищут путем обращения к описанному выше первому индексу релевантности на основе входной информации. Полученная таким образом информация алгоритма обнаружения используется для выбора информации алгоритма или условия фотографирования, лучше всего подходящих для фотографирования предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5, путем обращения к прошлым данным, сохраненным в базе 3 данных алгоритмов, на основе параметров осветительной системы и параметров системы формирования изображения в дополнение к введенному целевому результату в предмете.
[0112] Предмет фотографируют устройством 4 захвата спектральных изображений или фотографирующим устройством 5, где устанавливается информация алгоритма обнаружения, чтобы выполнялось вычисление характерной длины волны. В результате можно получить изображение цветового анализа, прошедшее вычисление.
[0113] Отметим, что описанный выше первый вариант осуществления не ограничивается вышеупомянутым примером. При допущении, что получается описанный выше первый индекс релевантности, на этапе S11 ввод информации алгоритма обнаружения может приниматься вместо приема ввода целевого результата в предмете. К тому же на этапе S13 целевой результат в предмете ищут наоборот путем обращения к описанному выше первому индексу релевантности на основе принятой информации алгоритма обнаружения. То есть взаимосвязь входа/выхода из фиг. 8 и 9 меняется с вышеупомянутым примером, чтобы информация алгоритма обнаружения задавалась в качестве входа, а целевой результат в предмете задавался в качестве выхода.
[0114] В качестве прикладного примера этого аспекта, например, в случае, где неизвестный предмет фотографируют устройством 4 захвата спектральных изображений или фотографирующим устройством 5, и в результате характерные длины волн составляют 310 нм и 660 нм, можно определить, что соль из смеси с большой долей вероятности является целевым результатом в предмете.
[0115] Второй вариант осуществления
Фиг. 14 - блок-схема, иллюстрирующая общую конфигурацию системы 1' поиска информации в соответствии со вторым вариантом осуществления изобретения. Система 1' поиска информации предназначена для поиска условия фотографирования у фотографирующего устройства 5 для определения целевого результата из фотографируемого предмета 10. Система 1' поиска информации включает в себя базу 3 данных алгоритмов, базу 6 данных условий фотографирования, устройство 2 поиска, подключенное к базе 3 данных алгоритмов и базе 6 данных условий фотографирования, устройство 4 захвата спектральных изображений, подключенное к устройству 2 поиска, и фотографирующее устройство 5.
[0116] Во втором варианте осуществления одинаковые номера ссылок обозначают одинаковые элементы с первым вариантом осуществления, и они не будут описываться повторно.
[0117] База 6 данных условий фотографирования является базой данных касательно условий фотографирования у фотографирующего устройства 5. База 6 данных условий фотографирования хранит информацию, переданную по общедоступной сети связи, или информацию, введенную пользователем этой системы. К тому же база 6 данных условий фотографирования передает накопленную информацию устройству 2 поиска в ответ на запрос от устройства 2 поиска.
[0118] Будут описываться операции системы 1' поиска информации в соответствии со вторым вариантом осуществления с вышеупомянутой конфигурацией.
[0119] Сначала устройство 2 поиска ищет условие фотографирования, которое нужно предоставить фотографирующему устройству 5. Этот процесс поиска начинается, когда фотографирующее устройство 5 получает информацию алгоритма обнаружения для фотографирования. В качестве информации алгоритма обнаружения может непосредственно применяться информация алгоритма обнаружения, разыскиваемая в первом варианте осуществления, или пользователь может заново ввести информацию алгоритма обнаружения. Полученная таким образом информация алгоритма обнаружения временно сохраняется в запоминающем устройстве 28.
[0120] В соответствии со вторым вариантом осуществления программа поиска информации ищет условие фотографирования с высоким индексом релевантности у полученной информации алгоритма обнаружения. Перед этой операцией поиска база 6 данных условий фотографирования заранее получает индекс релевантности между базовой информацией алгоритма обнаружения и условием фотографирования, как проиллюстрировано на фиг. 15.
[0121] Здесь "условие фотографирования" включает в себя определенную конфигурацию оптической системы 51 формирования изображения, определенную конфигурацию фильтра 52, определенную конфигурацию элемента 53 захвата изображений и определенную конфигурацию блока 54 обработки сигналов в фотографирующем устройстве 5. Например, условие фотографирования включает в себя "баланс белого XX", сочетание "компоновки P линз" и "фильтра W", "фильтра Q", сочетание "фильтра R" и "угла освещения XX°", сочетание "фильтра S" и "пространственного разрешения 133-140 dpi", "времени экспозиции XX нс или больше", "времени экспозиции короче XX нс" или т.п., как проиллюстрировано на фиг. 15.
[0122] Условие фотографирования может включать в себя множество факторов в сочетании или может включать в себя один фактор. Условие фотографирования, например "время экспозиции", можно классифицировать на "время экспозиции XX нс или больше" и "время экспозиции короче XX нс", а затем с каждым из факторов можно ассоциировать второй индекс релевантности. Кроме того, каждому фактору можно назначить определенное условие. Например, "фильтр Q" может обладать длиной волны пропускания фильтра от 600 до 650 нм или т.п. Например, "фильтр R" может обладать длиной волны пропускания фильтра от 340 до 400 нм или т.п. Например, "фильтр S" может обладать длиной волны пропускания фильтра от 1000 до 1100 нм или т.п.
[0123] Информация алгоритма обнаружения аналогична таковой в описанном выше первом варианте осуществления. То есть информация алгоритма обнаружения включает в себя характерную длину волны, диапазон характерных длин волн, способ вычисления и т.п. Второй индекс релевантности может задаваться путем объединения известных условий фотографирования, например информации об освещении, различных параметров системы формирования изображения и параметров аппаратных средств в дополнение к информации алгоритма обнаружения. В дальнейшем информация алгоритма обнаружения, ассоциированная с использованием второго индекса релевантности, будет называться "базовой информацией алгоритма обнаружения", а известное условие фотографирования, ассоциированное с использованием второго индекса релевантности, будет называться "базовым условием фотографирования".
[0124] Базовая информация алгоритма обнаружения и базовое условие фотографирования ассоциируются с условием фотографирования, которое нужно найти, с использованием второго индекса релевантности. Например, сочетание способа вычисления, включающего длину волны 880±5 нм, длину волны 970±10 нм и кластерный анализ, ассоциируется с "фильтром Q" со вторым индексом релевантности в 80% и ассоциируется с "балансом белого XX" со вторым индексом релевантности в 20%. Сочетание длин волн 230±12 нм и 630±5 нм ассоциируется с сочетанием "фильтра S" и "пространственного разрешения от 133 до 140 dpi" со вторым индексом релевантности в 100% и ассоциируется с сочетанием "компоновки P линз" и "фильтра W" со вторым индексом релевантности в 40%. Сочетание длины волны 547±4 нм, длины волны 275±12 нм, регрессии методом дробных наименьших квадратов и скорости затвора XX секунд ассоциируется с "балансом белого XX" со вторым индексом релевантности в 60% и ассоциируется с "временем экспозиции короче XX нс" со вторым индексом релевантности в 20%. Сочетание элемента T захвата изображений и скорости затвора XX секунд ассоциируется с сочетанием "компоновки P линз" и "фильтра W" со вторым индексом релевантности в 80% и ассоциируется с "фильтром S" и "пространственным разрешением от 133 до 140 dpi" со вторым индексом релевантности в 40%. Характерная длина волны 455±12 нм ассоциируется с "фильтром R" со вторым индексом релевантности в 100% и ассоциируется с "временем экспозиции XX нс или больше" со вторым индексом релевантности в 20%.
[0125] Второй индекс релевантности относится к сходству условия фотографирования у фотографирующего устройства 5 при определении на основе каждой базовой информации алгоритма обнаружения или каждого базового условия фотографирования. Другими словами, второй индекс релевантности указывает точность исполнения или способа фотографирования у фотографирующего устройства 5 для базовой информации алгоритма обнаружения или базового условия фотографирования и, дополнительно, целевого результата в предмете, определенного с его использованием. В вышеупомянутом примере сочетание "компоновки P линз" и "фильтра W" обладает наилучшим сходством в качестве условия фотографирования, которое нужно найти для сочетания элемента T захвата изображений и скорости затвора XX секунд, и дополнительно указывает, что можно выполнить определение с наивысшей эффективностью и точностью. Очевидно, что условие фотографирования для сочетания элемента T захвата изображений и скорости затвора XX секунд связано с "фильтром S" и "пространственным разрешением от 133 до 140 dpi".
[0126] База 6 данных условий фотографирования хранит каждое условие фотографирования совместно с описанными выше базовой информацией алгоритма обнаружения или базовым условием фотографирования с использованием второго индекса релевантности.
[0127] Программа поиска информации может обращаться ко второму индексу релевантности из фиг. 15, чтобы искать условие фотографирования, обладающее большим сходством с информацией алгоритма обнаружения, разыскиваемой в первом варианте осуществления, либо вновь введенной информацией алгоритма обнаружения или базовым условием фотографирования. Например, в случае, где вновь введенной информацией алгоритма обнаружения является сочетание 230±12 нм и 630±5 нм, соответствующие им "фильтр S" и "пространственное разрешение от 133 до 140 dpi" с высоким вторым индексом релевантности у базовой информации алгоритма обнаружения выбираются в качестве условия фотографирования в случае, где обращаются к описанному выше второму индексу релевантности или базовому условию фотографирования. В качестве условия фотографирования также можно выбрать сочетание "компоновки P линз" и "фильтра W", где второй индекс релевантности низкий, но сама релевантность подтверждается. Аналогичным образом, когда информация алгоритма обнаружения, разыскиваемая в первом варианте осуществления, или базовое условие фотографирования является элементом T захвата изображений и скоростью затвора XX секунд, выбирается сочетание "компоновки P линз" и "фильтра W".
[0128] Аналогичным образом во втором варианте осуществления выбор условия фотографирования не ограничивается убывающим порядком, при котором с большим приоритетом выбирается более высокий второй индекс релевантности. Условие фотографирования может выбираться в возрастающем порядке, начиная с более низкого второго индекса релевантности в каждом отдельном случае, или также может применяться любой другой способ выбора на основе приоритета.
[0129] Если информация алгоритма обнаружения, разыскиваемая в первом варианте осуществления (введенная информация алгоритма обнаружения), не совпадает с базовой информацией алгоритма обнаружения, то можно расширить диапазон характерных длин волн у этой базовой информации алгоритма обнаружения. Например, в случае, где полученной информацией алгоритма обнаружения является длина волны 660 нм, она не включается ни в какую базовую информацию алгоритма обнаружения, сохраненную в базе 6 данных условий фотографирования. В этом случае диапазон характерных длин волн у базовой информации алгоритма обнаружения можно расширить до ±30 нм. В качестве альтернативы можно оценивать и назначать аналогичный базовый алгоритм обнаружения.
[0130] Фиг. 16 иллюстрирует пример, в котором условие фотографирования ассоциируется с сочетанием базового алгоритма обнаружения и базового условия фотографирования с использованием второго индекса релевантности с тремя или более уровнями. В случае, где базовый алгоритм обнаружения или базовое условие фотографирования принадлежит группе 1) сочетаний и группе 2) сочетаний, их сочетание ассоциируется с "балансом белого XX" со вторым индексом релевантности в 80% и ассоциируется с сочетанием "фильтра R" и "угла освещения XX°" со вторым индексом релевантности в 20%. В случае, где базовый алгоритм обнаружения содержит логическое произведение или логическую сумму каждой группы сочетаний с 3) по 5), их сочетание ассоциируется с сочетанием "фильтра S" и "пространственного разрешения от 133 до 140 dpi" со вторым индексом релевантности в 60% и ассоциируется с "временем экспозиции короче XX нс" со вторым индексом релевантности в 20%.
[0131] В случае, где заранее сохраняются такие вторые индексы релевантности, и информация алгоритма обнаружения, разыскиваемая в первом варианте осуществления, или известное условие фотографирования (введенная информация алгоритма обнаружения или базовое условие фотографирования) является сочетанием групп 1) и 2) сочетаний, можно искать "баланс белого XX" со вторым индексом релевантности в 80% и "фильтр R" и "угол освещения XX°" со вторым индексом релевантности в 20% путем обращения ко вторым индексам релевантности.
[0132] После их выбора программа поиска информации отображает выбранное условие фотографирования в блоке 23 отображения в устройстве 2 поиска. В результате пользователь, наблюдая блок 23 отображения, может немедленно распознать условие фотографирования, которое нужно найти, в зависимости от информации алгоритма обнаружения или известного условия фотографирования. Аналогичным образом в соответствии со вторым вариантом осуществления в такой операции поиска может применяться искусственный интеллект. То есть второй индекс релевантности может конфигурироваться с использованием нейронной сети.
[0133] Такой объединенный второй индекс релевантности можно задать так, как проиллюстрировано на фиг. 17. В примере из фиг. 17 сочетания одной или нескольких порций базовой информации алгоритма обнаружения и одного или нескольких базовых условий фотографирования в качестве базовой информации алгоритма обнаружения ассоциируются с условием фотографирования, которое нужно найти, с использованием второго индекса релевантности с тремя или более уровнями.
[0134] Как проиллюстрировано на фиг. 17, вторые индексы релевантности выражаются узлами с 61a по 61e так называемых невидимых уровней в виде набора сочетаний одной или нескольких порций базовой информации алгоритма обнаружения и одного или нескольких базовых условий фотографирования. Вес для базовой информации алгоритма обнаружения или базового условия фотографирования и вес для выходного решения устанавливаются для каждого узла с 61a по 61e. Этот вес является вторым индексом релевантности с тремя или более уровнями. Например, узел 61a ассоциируется с "880±5 нм, 970±10 нм, кластерный анализ" в качестве базовой информации алгоритма обнаружения со вторым индексом релевантности в 80% и ассоциируется со "спектральной характеристикой R1 камеры" в качестве базового условия фотографирования со вторым индексом релевантности в 80%. К тому же узел 61c ассоциируется с "230±12 нм, 630±5 нм" в качестве базовой информации алгоритма обнаружения со вторым индексом релевантности в 60%, ассоциируется с "элементом T захвата изображений, скоростью затвора XX секунд" в качестве базового условия фотографирования со вторым индексом релевантности в 60% и ассоциируется со "спектральной характеристикой R2 камеры" в качестве базового условия фотографирования со вторым индексом релевантности в 40%.
[0135] В случае, где заранее сохраняются вторые индексы релевантности, и информация алгоритма обнаружения, разыскиваемая в первом варианте осуществления, или известное условие фотографирования (введенная информация алгоритма обнаружения или базовое условие фотографирования) ассоциируется с "880±5 нм, 970±10 нм, кластерный анализ" в качестве базовой информации алгоритма обнаружения и "скоростью затвора XX секунд" в качестве базового условия фотографирования, этот случай ассоциируется с узлом 61b с использованием вторых индексов релевантности. К тому же этот узел 61b ассоциируется с "фильтром R, углом освещения XX°" со вторым индексом релевантности в 60% и ассоциируется с "временем экспозиции короче XX нс" со вторым индексом релевантности в 40%. Эти условия можно вывести в качестве результата поиска.
[0136] Каждый из второго индекса релевантности, связанного из этого узла 61 с условием фотографирования, которое нужно найти, и второго индекса релевантности, связанного из базовой информации алгоритма обнаружения или базового условия фотографирования с узлом 61, содержит три или более уровней. Однако любой из второго индекса релевантности, связанного из узла 61 с условием фотографирования, которое нужно найти, и второго индекса релевантности, связанного из базовой информации алгоритма обнаружения или базового условия фотографирования с узлом 61, может содержать два уровня, то есть может конфигурироваться в зависимости от того, связаны они или нет.
[0137] Аналогичным образом это можно применять к описанному выше первому индексу релевантности. То есть объединенные индексы релевантности можно связать с узлами 61, предусмотренными между входной стороной (например, стороной, где на фиг. 17 помещаются базовая информация алгоритма обнаружения и базовое условие фотографирования) и выходной стороной (например, стороной, где на фиг. 17 помещается условие фотографирования, которое нужно найти). К тому же первые индексы релевантности с тремя или более уровнями можно назначить независимо узлам 61 от входной стороны и выходной стороне от узлов 61, и каждый индекс релевантности может обновляться независимо.
[0138] Пользователь проектирует каждое из оптической системы 51 формирования изображения, фильтра 52, элемента 53 захвата изображений, блока 54 обработки сигналов и т.п. в фотографирующем устройстве 5 на основе выведенного условия фотографирования, задает условие освещения или выбирает различные условия касательно фотографирования. В частности, в соответствии с настоящим изобретением можно уменьшить трудовые затраты для изучения оптимального условия фотографирования для фотографирующего устройства 5 и соответственно сократить время, когда последовательно формируется новый целевой результат в предмете, или когда создается новая информация алгоритма обнаружения.
[0139] Система 1 поиска информации в соответствии с настоящим изобретением отличается тем, что оптимальное условие фотографирования ищут с использованием второго индекса релевантности, заданного на трех или более уровнях. Второй индекс релевантности может описываться, например, с использованием численного значения от 0 до 100%. Однако изобретение этим не ограничивается. Второй индекс релевантности может описываться любым количеством уровней при условии, что его можно описать с использованием числового значения с тремя или более уровнями.
[0140] Поскольку операция поиска выполняется на основе второго индекса релевантности, выраженного таким образом численным значением с тремя или более уровнями, условия фотографирования можно искать и отображать в убывающем порядке второго индекса релевантности, когда выбирается множество условий фотографирования. Если условие фотографирования отображается для пользователя в убывающем порядке второго индекса релевантности, то пользователя можно побудить выбрать с большим приоритетом условие фотографирования, обладающее большей вероятностью. Между тем даже условие фотографирования с более низким вторым индексом релевантности может отображаться как еще одно мнение. Это полезно, когда исполнение с использованием первого мнения непростое.
[0141] К тому же в соответствии с настоящим изобретением можно без потери определить условие фотографирования с существенно низким вторым индексом релевантности, например 1%. Поэтому можно позволить пользователю обратить внимание на то, что даже условие фотографирования с существенно низким вторым индексом релевантности связано как незначительное указание и может быть полезно как условие фотографирования один раз из нескольких десятков или сотен раз.
[0142] В соответствии с настоящим изобретением можно выбрать стратегию поиска преимущественно путем задания порогового значения, поскольку операция поиска выполняется таким образом на основе второго индекса релевантности с тремя или более уровнями. Если пороговое значение устанавливается ниже, то можно без потери обнаружить условие фотографирования, даже когда описанный выше индекс релевантности равен 1%. Однако может уменьшиться вероятность надлежащего обнаружения условия фотографирования, подходящего для информации алгоритма обнаружения или известного условия фотографирования. Что же касается ситуации, если пороговое значение устанавливается выше, то можно сузить условие фотографирования, с высокой вероятностью подходящее для информации алгоритма обнаружения или известного условия фотографирования. Однако в некоторых случаях можно пропустить условие фотографирования, которое может подходить один раз из нескольких десятков или сотен раз. Чему придать значение - можно решить с точки зрения пользователя или системы. Однако можно повысить степень свободы для выбора такой точки акцента.
[0143] Фиг. 18 иллюстрирует пример, в котором с левой стороны условие фильтрации задается в качестве базового условия фотографирования, а с правой стороны состояние элемента захвата изображений задается в качестве условия фотографирования, которое нужно найти. В описанном выше примере из фиг. 15 с левой стороны состояние элемента захвата изображений задается в качестве базового условия фотографирования, а с правой стороны условие фильтрации задается в качестве условия фотографирования, которое нужно найти. То есть их местоположения на фиг. 18 меняются.
[0144] В примере из фиг. 18 элементы T, U и W захвата изображений включаются в качестве условия фотографирования, которое нужно найти, и условие фильтрации выбирается перед поиском в качестве фильтра S или фильтра R. Поэтому "фильтр S" и "фильтр R" включаются в качестве базового условия фотографирования с левой стороны. Можно искать оптимальный элемент захвата изображений, подходящий для любого условия фильтра S, с использованием второго индекса релевантности из фиг. 18.
[0145] Таким образом, в соответствии со вторым вариантом осуществления можно заранее подготовить второй индекс релевантности путем классификации информации об освещении, различных параметров системы формирования изображения и параметров аппаратных средств на условие фотографирования, которое нужно фактически найти, и заранее выбранное условие. В результате, даже когда иногда меняется условие фотографирования, которое нужно найти, можно реализовать операцию поиска путем создания заранее второго индекса релевантности, так что условие фотографирования, которое нужно фактически найти, размещается с правой стороны.
[0146] В соответствии с настоящим изобретением может обновляться описанный выше второй индекс релевантности. То есть по необходимости обновляются базовая информация алгоритма обнаружения, базовое условие фотографирования и проектная информация, проиллюстрированные на фиг. 15. Это обновление может выполняться для отражения информации, предоставленной по общедоступной сети связи, например Интернет. Когда найдены новые сведения о взаимосвязи между базовой информацией алгоритма обнаружения, базовым условием фотографирования и проектной информацией посредством информации с сайтов или работ, доступных из общедоступной сети связи, индекс релевантности увеличивается или уменьшается в зависимости от тех сведений. Например, когда на сайтах общедоступной сети связи много раз упоминается, что условие фотографирования с некоторым уровнем индекса релевантности для некоторой информации алгоритма обнаружения обладает высоким сходством, дополнительно увеличивается установленный между ними второй индекс релевантности. К тому же, когда на сайтах общедоступной сети связи много раз упоминается, что условие фотографирования с некоторым уровнем второго индекса релевантности для некоторой информации алгоритма обнаружения обладает плохим сходством, установленный между ними второй индекс релевантности уменьшается. К тому же, когда на сайтах общедоступной сети связи упоминается, что некоторую информацию алгоритма обнаружения можно обнаружить с высокой точностью, используя условие фотографирования, которое не существовало до настоящего времени, обновление может выполняться путем задания нового второго индекса релевантности между ними.
[0147] Второй индекс релевантности может обновляться на основе информации, доступной из общедоступной сети связи. К тому же обновление может выполняться искусственно или автоматически системой либо пользователем на основе содержимого данных исследований, документов, докладов конференций или т.п. с помощью экспертов. При этой обновляющей обработке может использоваться искусственный интеллект.
[0148] Отметим, что в соответствии с настоящим изобретением второй вариант осуществления может исполняться последовательно за первым вариантом осуществления. В этом случае сначала в первом варианте осуществления вводится целевой результат в предмете, и оптимальная информация алгоритма обнаружения или оптимальное условие фотографирования, подходящее для целевого результата, выбирается путем обращения к первому индексу релевантности. Затем обращаются ко второму индексу релевантности на основе выбранной информации алгоритма обнаружения или условия фотографирования, чтобы выбрать подходящее оптимальное условие фотографирования у фотографирующего устройства 5. То есть, когда вводится целевой результат в предмете, оптимальное условие фотографирования для фотографирования предмета с использованием фотографирующего устройства 5 отображается как решение в устройстве 2 поиска.
[0149] Поток данных в соответствии со вторым вариантом осуществления будет описываться со ссылкой на фиг. 13. Различные условия фотографирования у фотографирующего устройства 5 выбираются на основе информации алгоритма обнаружения или условия фотографирования, разыскиваемых в первом варианте осуществления. В качестве условия фотографирования выбирается одно или несколько из параметров аппаратных средств, например описанных выше оптической системы 51 формирования изображения, фильтра 52, элемента 53 захвата изображений и блока 54 обработки сигналов, параметров фотографирующей системы и информации об освещении. Фотографирующее устройство 5, сконфигурированное отражением этих условий фотографирования, имеет конфигурацию, подходящую для обнаружения целевого результата в предмете, обнаруживаемого из информации алгоритма обнаружения. К тому же можно получить изображение цветового анализа, прошедшее вычисление, путем фотографирования предмета с использованием фотографирующего устройства 5 и выполнения вычисления характерной длины волны.
[0150] Отметим, что в соответствии со вторым вариантом осуществления, когда фотографирующее устройство 5 реализуется, в частности, в виде любой цифровой камеры, встроенной в мобильный телефон, смартфон, планшетный терминал или носимый терминал, условие фильтрации в прикладном программном обеспечении для получения изображения цветового анализа или способ вычисления фильтра также можно включить в вышеупомянутое условие фотографирования. "Условие фильтрации" в прикладном программном обеспечении относится к условию для конкретного выбора характерной длины волны или диапазона характерных длин волн у формирующего изображения света, который нужно пропускать с использованием программного обеспечения. Аналогичным образом "вычисление фильтра" относится к операции выбора, какой вид вычисления характерной длины волны выполняется, в частности, с использованием программного обеспечения.
[0151] В соответствии с настоящим изобретением целевой результат можно автоматически определить из спектральных данных, полученных путем фотографирования предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5, на основе разыскиваемой информации алгоритма обнаружения или условия фотографирования. В случае этого определения устройство 2 поиска может обладать функцией автоматического определения.
[0152] Фиг. 19 иллюстрирует третьи индексы релевантности, необходимые для автоматического определения целевого результата с использованием спектральных данных. В этом примере третьего индекса релевантности заранее изучаются спектральные данные и исход определения целевого результата, полученные путем фотографирования предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5.
[0153] База 3 данных алгоритмов заранее сохраняет третьи индексы релевантности с тремя или более уровнями между спектральными данными r1, r2, r3, …, и так далее и исходами определения целевого результата в качестве выходного решения. В примере из фиг. 19 в случае, где спектральными данными являются "r1", "процентное содержание дефектов 3%" в качестве процентного содержания дефектов, сформированных на поверхности стекла, имеет третий индекс релевантности в 80%, а "процентное содержание дефектов 4%" имеет третий индекс релевантности в 60%. К тому же в случае, где спектральными данными являются "r2", "процентное содержание дефектов 5%" имеет индекс релевантности в 90%, а "процентное содержание дефектов 2%" имеет индекс релевантности в 40%.
[0154] Третий индекс релевантности может задаваться на основе спектральных данных r1, r2, r3, … и так далее, полученных путем фотографирования предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5, и процентных содержаний дефектов в качестве исходов определения, заранее накопленных в базе 3 данных алгоритмов. Третий индекс релевантности можно получить с использованием так называемой нейронной сети. Третий индекс релевантности представляет собой точность исхода определения (например, описанное выше процентное содержание дефектов) при фактическом определении целевого результата в предмете на основе спектральных данных. Например, для спектральных данных r3 "процентное содержание дефектов 1%" с индексом релевантности в 70% близко к самому точному определению, а "процентное содержание дефектов 3%" с индексом релевантности в 50% является следующим точным определением. Аналогичным образом для спектральных данных r2 "процентное содержание дефектов 5%" с индексом релевантности в 90% близко к самому точному определению, а "процентное содержание дефектов 2%" с индексом релевантности в 40% является следующим точным определением.
[0155] Затем новые спектральные данные получаются путем фактического фотографирования стекла в качестве предмета с использованием устройства 4 захвата спектральных изображений или фотографирующего устройства 5 на основе разыскиваемого алгоритма. Работа для определения целевого результата в предмете выполняется на основе полученных спектральных данных. При этом определении обращаются к полученному заранее третьему индексу релевантности из фиг. 19. Если вновь полученными спектральными данными являются спектральные данные r1 или близкие к ним данные, то "процентное содержание дефектов 3%" с наивысшим третьим индексом релевантности выбирается в качестве оптимального решения путем обращения к описанным выше третьим индексам релевантности. Однако необязательно выбирать решение с наивысшим третьим индексом релевантности в качестве оптимального решения. Вместо этого в качестве оптимального решения может выбираться "процентное содержание дефектов 4%", у которого низкий третий индекс релевантности, но оно само по себе обладает релевантностью. Естественно, любое другое выходное решение, не связанное стрелкой, также можно выбрать в качестве выходного решения. То есть выбор исхода определения для целевого результата в предмете не ограничивается убывающим порядком, при котором с большим приоритетом выбирается исход определения с более высоким третьим индексом релевантности. Вместо этого может выбираться исход определения в возрастающем порядке от более низкого третьего индекса релевантности. В качестве альтернативы также может применяться любой другой способ выбора на основе приоритета.
[0156] В случае, где полученные спектральные данные частично аналогичны спектральным данным r2, а также частично аналогичны спектральным данным r3, и сложно узнать, каким из них назначается результат, определение может выполняться, например, уделяя внимание характеристике между изображениями или т.п. В этом случае то, каким из них назначается результат, можно определить путем рассмотрения яркости спектральных данных в качестве характерной области изображения. Чтобы определить, на какие из спектральных данных с r1 по r3 похоже изображение в полученных спектральных данных, может использоваться, например, глубинное обучение или т.п. На основе характеристической величины изображения посредством глубинного обучения определяется, каким из спектральных данных с r1 по r3 назначается результат. Затем полученные спектральные данные назначаются любым из r1-r3, и исход определения целевого результата в предмете выбирается в качестве выходного решения на основе заданного третьего индекса релевантности.
[0157] Отметим, что способ выбора исхода определения целевого результата в предмете для полученных спектральных данных не ограничивается вышеупомянутым, и любой способ может применяться при условии, что обращаются к третьему индексу релевантности. К тому же для выполнения такой операции поиска также может применяться искусственный интеллект.
[0158] Фиг. 20 иллюстрирует пример, в котором третий индекс релевантности с тремя или более уровнями устанавливается между сочетанием базовых спектральных данных r1, r2, …, и так далее и базовой информации алгоритма обнаружения и/или базового условия фотографирования, и исходом определения целевого результата в предмете для этого сочетания.
[0159] В этом случае третьи индексы релевантности выражаются узлами 61a-61e так называемых невидимых уровней в виде набора сочетаний базовых спектральных данных r1, r2, …, и так далее и базовой информации алгоритма обнаружения и/или базового условия фотографирования, как проиллюстрировано на фиг. 20. Вес для базовых спектральных данных r1, r2, …, и так далее и базовой информации алгоритма обнаружения и/или базового условия фотографирования и вес для исхода определения целевого результата в предмете устанавливаются для каждого узла с 61a по 61e. Эти веса являются третьими индексами релевантности с тремя или более уровнями. Например, узел 61a ассоциируется со спектральными данными r1 с третьим индексом релевантности в 80% и ассоциируется с "230±12 нм, 630±5 нм" в качестве информации алгоритма с третьим индексом релевантности в 80%. К тому же узел 61c ассоциируется со спектральными данными r2 с третьим индексом релевантности в 60%, ассоциируется с "фильтром S, пространственным разрешением" в качестве базового условия фотографирования с третьим индексом релевантности в 60% и ассоциируется с "455±12 нм" в качестве базовой информации алгоритма обнаружения с третьим индексом релевантности в 40%.
[0160] Аналогичным образом даже в случае, где так устанавливается третий индекс релевантности, когда спектральные данные получаются вновь, и условие фотографирования и/или информация алгоритма обнаружения получаются вновь, исход определения целевого результата в предмете ищут путем обращения к третьему индексу релевантности. В случае, где вновь полученными спектральными данными являются "r1", и условие фотографирования устанавливается в "баланс белого XX", этот случай ассоциируется с узлом 61b, используя третий индекс релевантности, и узел 61b ассоциируется с "процентным содержанием дефектов 3%" с третьим индексом релевантности в 60% и ассоциируется с "процентным содержанием дефектов 1%" с третьим индексом релевантности в 40%. Исход определения целевого результата в предмете выбирается на основе описанного выше третьего индекса релевантности.
[0161] Настоящее изобретение можно реализовать в виде системы поиска проектной информации. В системе поиска проектной информации проектную информацию для планирования целевого результата ищут на основе исхода определения целевого результата. Проектную информацию можно искать путем обращения, например, к четвертому индексу релевантности, который описан ниже.
[0162] Здесь проектная информация целевого результата включает в себя все типы информации, необходимой для планирования целевого результата в будущем. Например, в случае, где процент увлажнения лица равен 70% в качестве исхода определения целевого результата, ищут информацию, необходимую для проектирования подходящей для этого основы. В качестве альтернативы в случае, где исходом определения целевого результата является процентное содержание дефектов в стекле, ищут информацию, необходимую для проектирования материала стекла заново. Информация, необходимая для проектирования этого материала, может включать в себя, например, рекомендацию о том, что материал P образуется на первом слое, материал Q образуется на втором слое, составляется дисперсионное армирующее волокно, и материал R образуется на третьем слое.
[0163] Фиг. 21 иллюстрирует пример, в котором четвертый индекс релевантности с тремя или более уровнями устанавливается между сочетанием базовых спектральных данных r1, r2, …, и так далее и исхода определения базового целевого результата и проектной информацией, которую нужно найти.
[0164] В этом случае четвертые индексы релевантности выражаются узлами 61a-61e так называемых невидимых уровней в виде набора сочетаний базовых спектральных данных r1, r2, …, и так далее и исхода определения базового целевого результата, как проиллюстрировано на фиг. 21. Вес для базовых спектральных данных r1, r2, …, и так далее и исхода определения базового целевого результата и вес для проектной информации, которую нужно найти, устанавливаются для каждого узла с 61a по 61e. Эти веса являются четвертыми индексами релевантности с тремя или более уровнями. Например, узел 61a ассоциируется со спектральными данными r1 с третьим индексом релевантности в 80% и ассоциируется с "элемент A: элемент B=1: 3" в качестве исхода определения целевого результата с четвертым индексом релевантности в 80%. К тому же узел 61c ассоциируется со спектральными данными r2 с четвертым индексом релевантности в 60%, ассоциируется с "элемент A: элемент B=2: 1" в качестве исхода определения целевого результата с четвертым индексом релевантности в 60% и ассоциируется с "элемент A: элемент B=1: 6" в качестве исхода определения целевого результата с четвертым индексом релевантности в 40%.
[0165] Аналогичным образом даже в случае, где так устанавливается четвертый индекс релевантности, когда спектральные данные получаются вновь, и исход определения целевого результата получается вновь, проектную информацию ищут путем обращения к четвертому индексу релевантности. В случае, где вновь полученными спектральными данными являются "r1", и исходом определения целевого результата является "элемент A: элемент B=5: 1", этот случай ассоциируется с узлом 61b с использованием четвертого индекса релевантности, и узел 61b ассоциируется с "проектной информацией E" с четвертым индексом релевантности в 60% и ассоциируется с "проектной информацией G" с четвертым индексом релевантности в 40%. Проектная информация выбирается на основе описанного выше четвертого индекса релевантности.
[0166] В качестве альтернативы исход определения целевого результата может выбираться с использованием третьего индекса релевантности. В качестве альтернативы также может использоваться результат, вновь введенный отдельно от целевого результата.
[0167] Определение с использованием третьих и четвертых индексов релевантности может выполняться путем объединения одной или нескольких порций информации о местоположении касательно местоположения, где фотографируют предмет 10, картографической информации, полученной путем сравнения этой информации о местоположении с картой текущего положения, и информации о внешнем виде предмета 10 (например, форма, шаблон, цвет и текстура). В этом случае отдельно предоставляется блок получения информации о положении (не показан) для получения информации о текущем положении в реальном масштабе времени на основе сигнала местоположения спутника, передаваемого с искусственного спутника, или блок получения картографической информации (не показан) для хранения картографической информации, включающей карты Японии, карты различных стран мира. Информация о внешнем виде получается с использованием камеры, которая фотографирует предмет 10. Можно идентифицировать внешний вид (например, форму, шаблон, цвет и текстуру) предмета 10 из изображения предмета 10, фотографируемого камерой. Получают одну или несколько порций обнаруженной информации о местоположении, картографической информации и информации о внешнем виде, и строится модель обучения, использующая третий или четвертый индекс релевантности, как описано выше. В этом случае одна или несколько порций информации о местоположении, картографической информации и информации о внешнем виде размещаются с левой стороны узла 61 с третьим индексом релевантности на фиг. 20 или с левой стороны узла 61 с четвертым индексом релевантности на фиг. 21 и связываются с узлом 61. То есть третьи и четвертые индексы релевантности являются моделями, по которым может выполняться определение путем объединения одной или нескольких порций информации о местоположении, картографической информации и информации о внешнем виде. Поэтому можно определить различные события с использованием описанных выше третьих и четвертых индексов релевантности путем объединения одной или нескольких порций информации о местоположении, картографической информации и информации о внешнем виде.
[0168] Отметим, что информация о внешнем виде может включать в себя так называемую информацию о пространственных характеристиках. Здесь "информация о пространственных характеристиках" включает в себя пространственное местоположение (размещение), внешний вид (например, форма, размер, шаблон, цвет и текстура) или т.п. Эта информация о пространственных характеристиках представляет собой понятие, включающее характеристическую величину изображения, используемую в так называемой технологии глубинного обучения, и является информацией для идентификации пространственного местоположения (размещения) или внешнего вида при ее извлечении. Эта информация о пространственных характеристиках также может включать в себя спектральную характеристическую величину, извлеченную на основе спектра, а также типичную пространственную характеристическую величину. В качестве альтернативы информация о пространственных характеристиках может быть образована путем объединения пространственной характеристической величины и спектральной характеристической величины. Поскольку спектральная характеристическая величина получается путем извлечения характеристической величины на основе спектрального изображения, можно легко отделить нужный предмет от перемещения фона и извлечь характеристическую величину. Поэтому можно легко распознать информацию о внешнем виде.
[0169] В третьих и четвертых индексах релевантности также может применяться искусственный интеллект, например нейронная сеть.
……………………………………………………………
[0170] 1 система поиска информации
2 устройство поиска
3 база данных алгоритмов
4 устройство захвата спектральных изображений
5 фотографирующее устройство
6 база данных условий фотографирования
10 предмет
21 внутренняя шина
23 блок отображения
24 блок управления
25 манипуляционный блок
26 блок связи
27 блок поиска
28 запоминающее устройство
41 объектив
42 платформа точного линейного движения
43 пластина с щелью
43a щелевое отверстие
44 коллиматор
45 дисперсионный оптический элемент
46 изображающая линза
47 элемент захвата изображений
48 блок управления
51 оптическая система формирования изображения
52 фильтр
53 элемент захвата изображений
54 блок обработки сигналов
481 блок управления фотографированием
482 блок управления перемещением
483 блок создания спектральных данных
484 блок обработки изображений
484-1 блок корректирующей обработки
484-2 блок вычисления
484-3 блок получения изображения цветового анализа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОИСКА ИНФОРМАЦИИ И ПРОГРАММА ПОИСКА ИНФОРМАЦИИ | 2018 |
|
RU2734870C2 |
| ПОНИМАНИЕ ТАБЛИЦ ДЛЯ ПОИСКА | 2014 |
|
RU2671047C2 |
| СПОСОБ ПОИСКА ИНФОРМАЦИИ В МАССИВЕ ТЕКСТОВ | 2008 |
|
RU2392660C2 |
| РАНЖИРОВАНИЕ РЕЗУЛЬТАТОВ ПОИСКА С ИСПОЛЬЗОВАНИЕМ РАССТОЯНИЯ РЕДАКТИРОВАНИЯ И ИНФОРМАЦИИ О ДОКУМЕНТЕ | 2009 |
|
RU2501078C2 |
| НЕЧЕТКИЙ ПОИСК С ИСПОЛЬЗОВАНИЕМ ФОРМ СЛОВ ДЛЯ РАБОТЫ С БОЛЬШИМИ ДАННЫМИ | 2021 |
|
RU2768233C1 |
| МЕТОД ОТОБРАЖЕНИЯ РЕЛЕВАНТНОЙ КОНТЕКСТНО-ЗАВИСИМОЙ ИНФОРМАЦИИ | 2014 |
|
RU2683482C2 |
| ОБНАРУЖЕНИЕ ОБЪЕКТОВ ИЗ ЗАПРОСОВ ВИЗУАЛЬНОГО ПОИСКА | 2017 |
|
RU2729956C2 |
| ФРЕЙМВОРК ПРИЕМА ВИДЕО ДЛЯ ПЛАТФОРМЫ ВИЗУАЛЬНОГО ПОИСКА | 2017 |
|
RU2720536C1 |
| ХРАНЕНИЕ И ПОИСК ИНФОРМАЦИИ, ХАРАКТЕРНОЙ ДЛЯ КОНКРЕТНОГО УСТРОЙСТВА ИЗМЕРЕНИЯ ФОРМЫ | 2012 |
|
RU2631193C2 |
| СИСТЕМА ПОИСКА ИНФОРМАЦИИ С ОБРАТНОЙ СВЯЗЬЮ В РЕАЛЬНОМ ВРЕМЕНИ | 2010 |
|
RU2546308C2 |
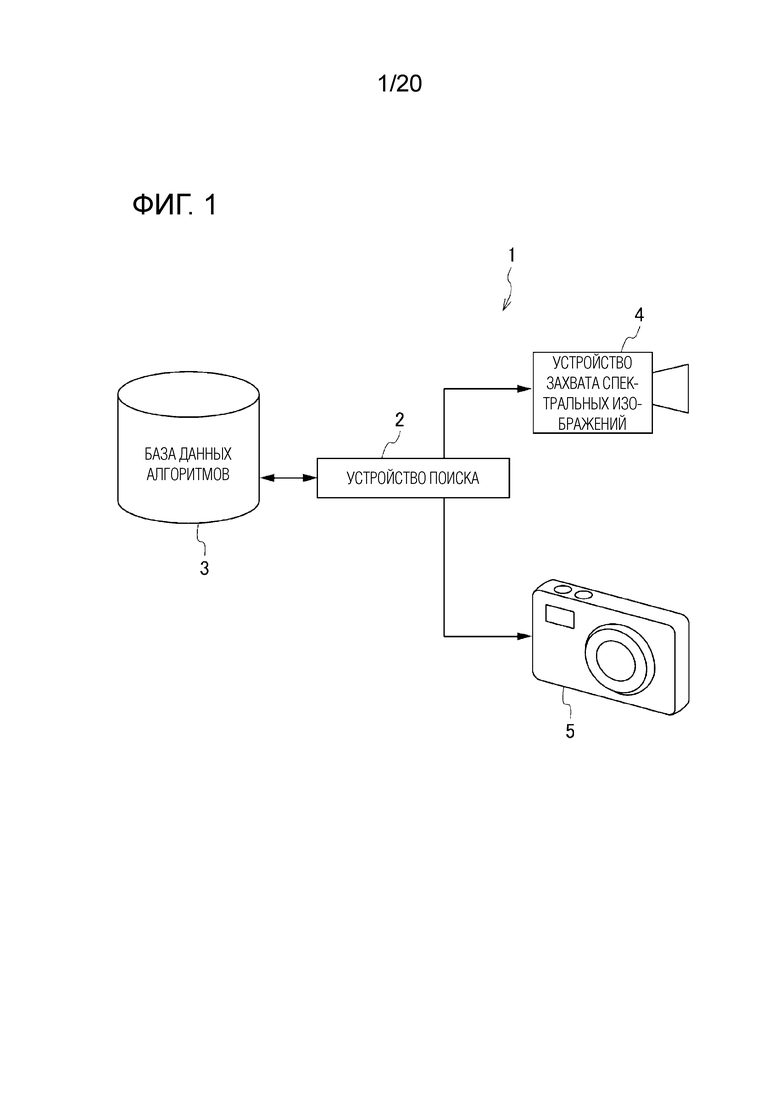
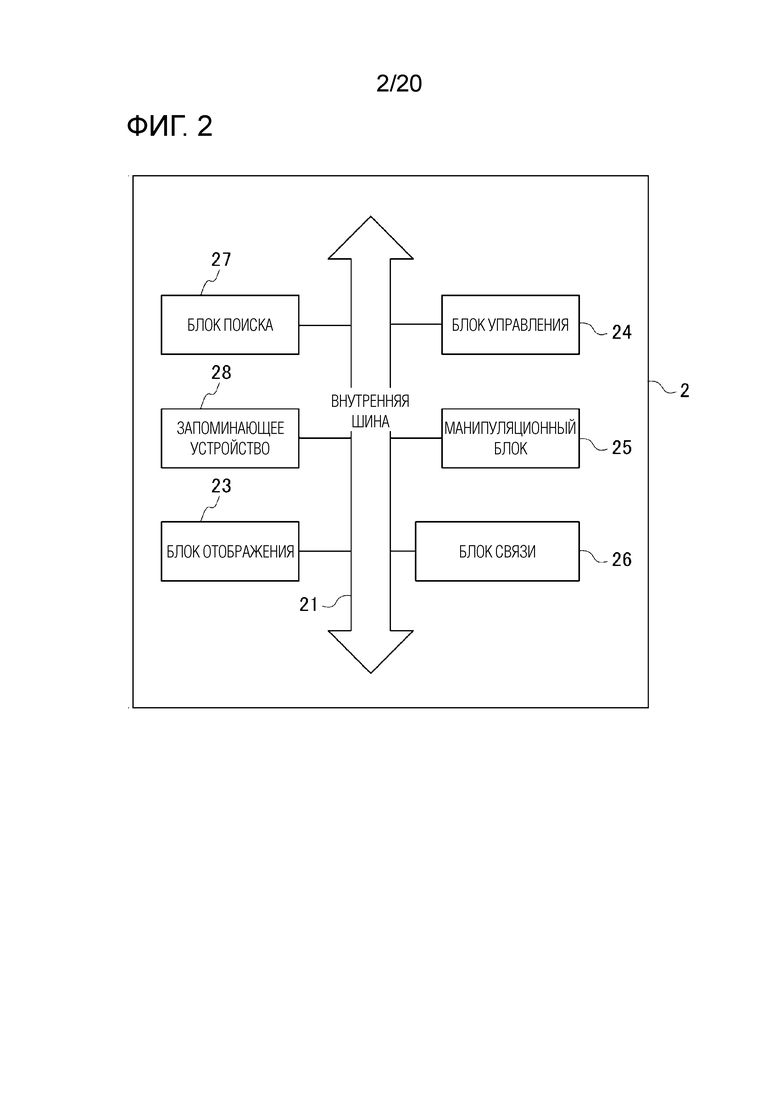
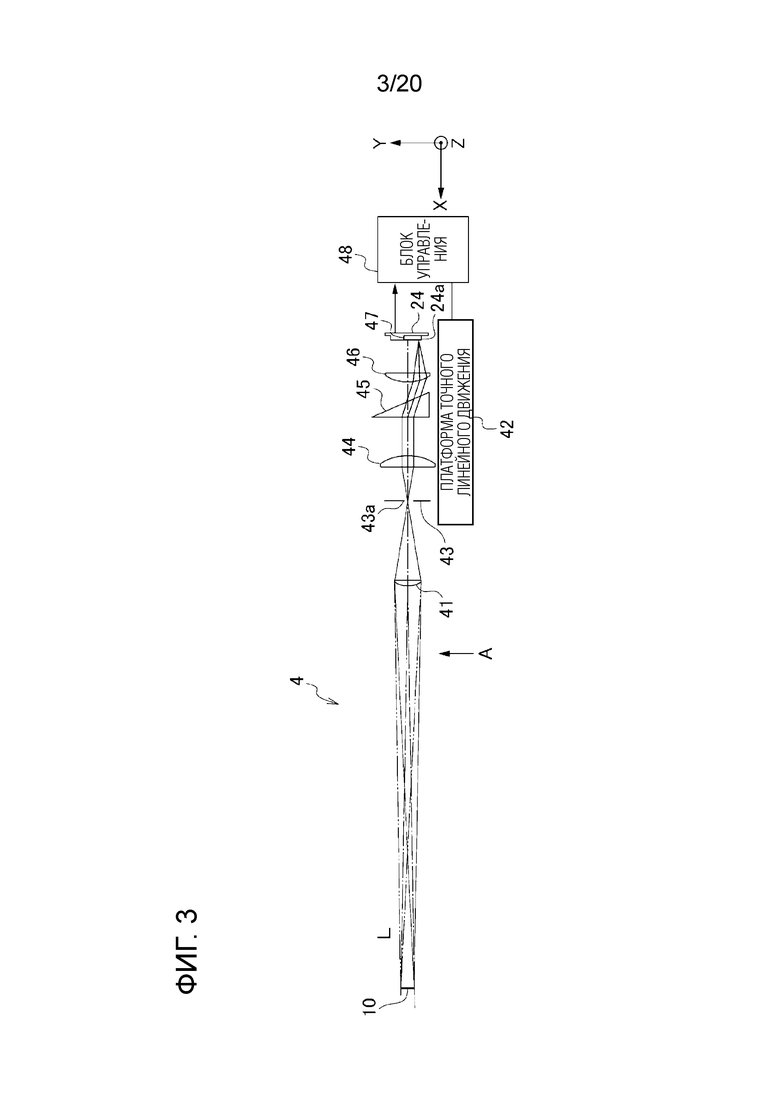
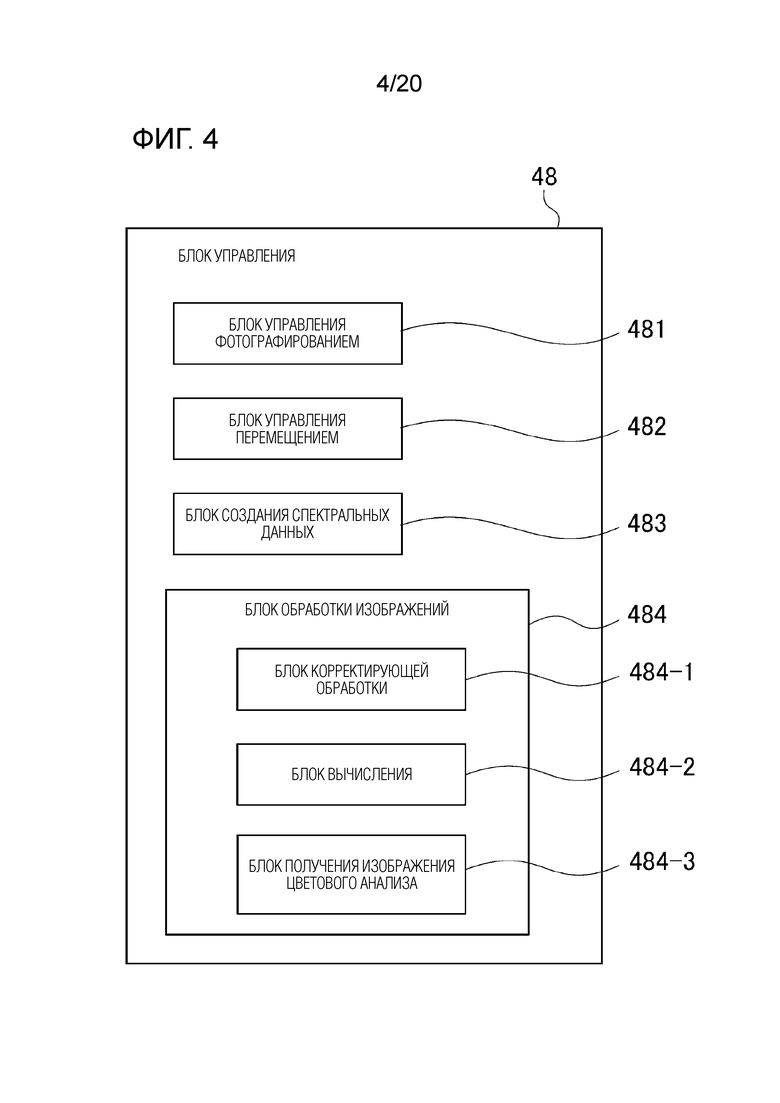

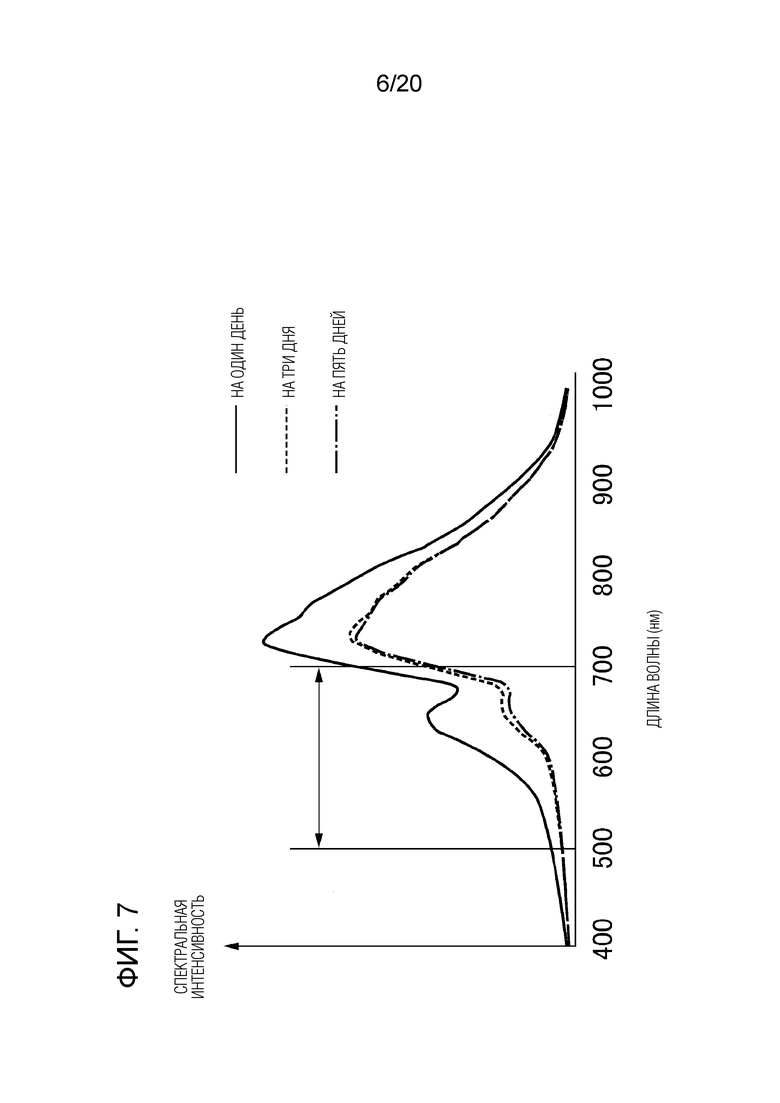
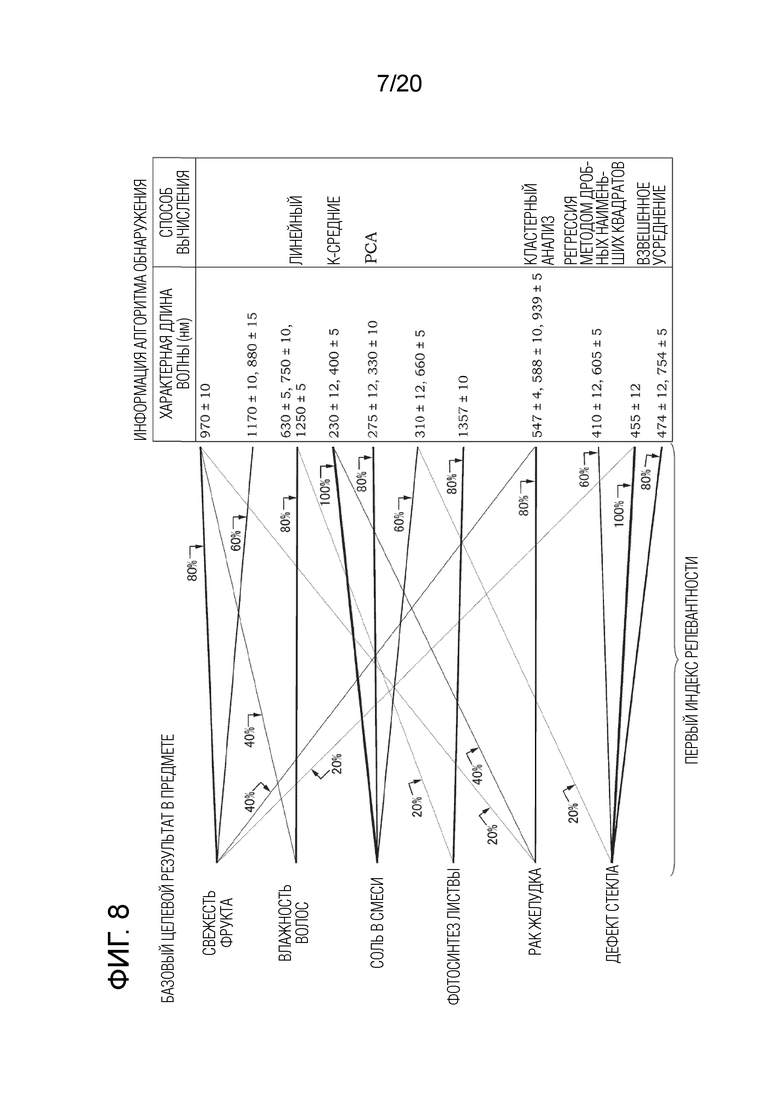
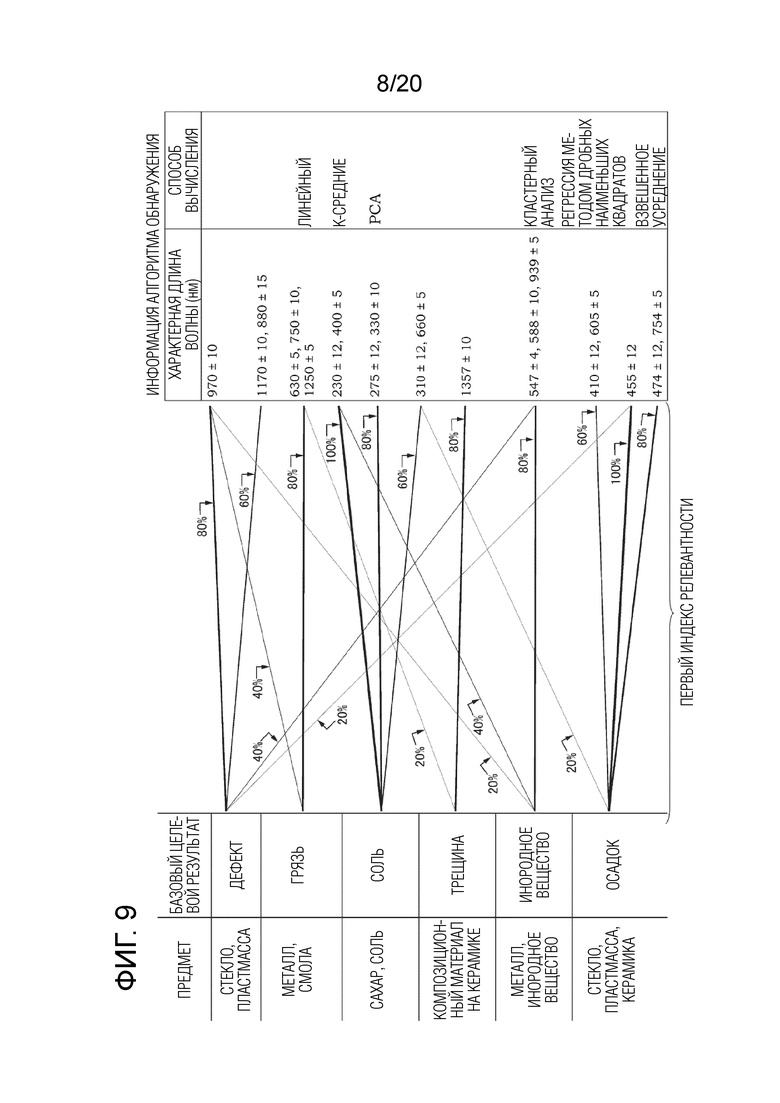
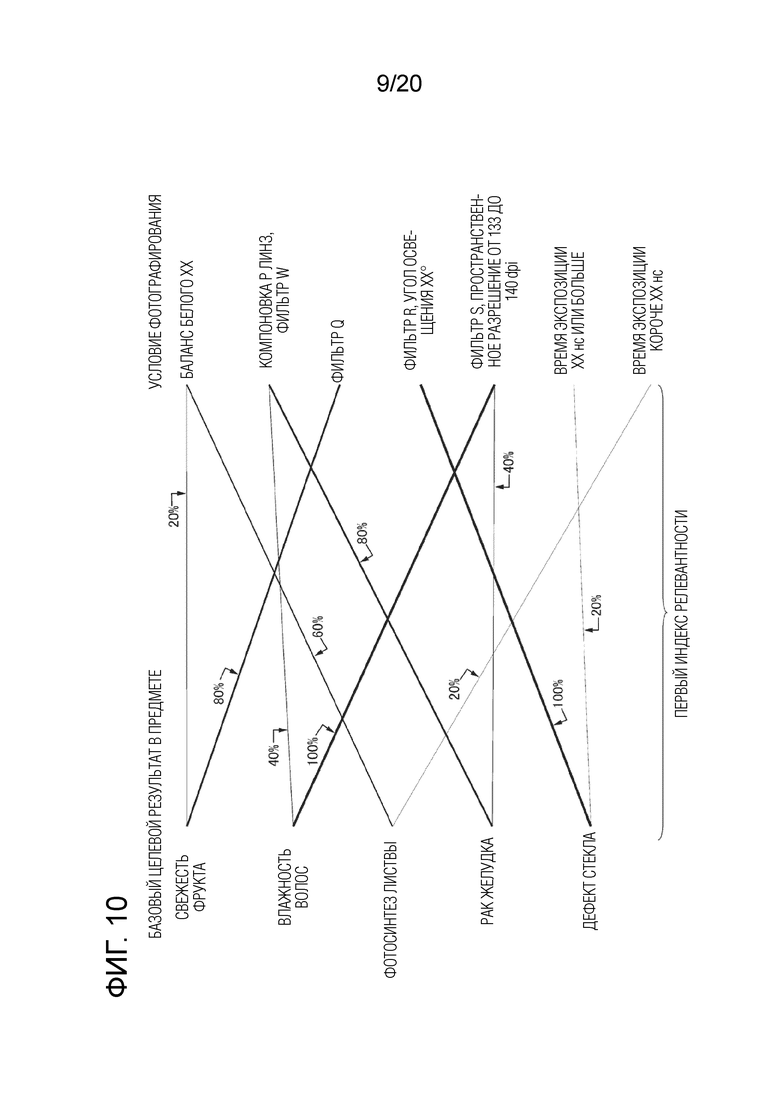
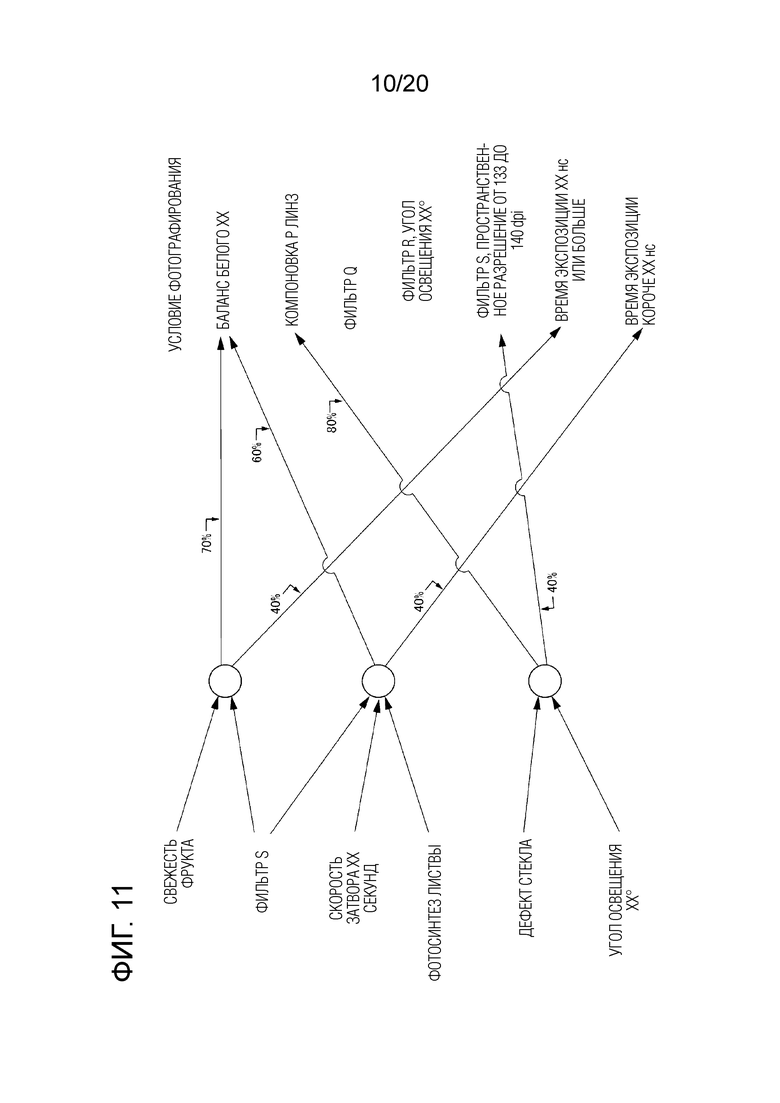
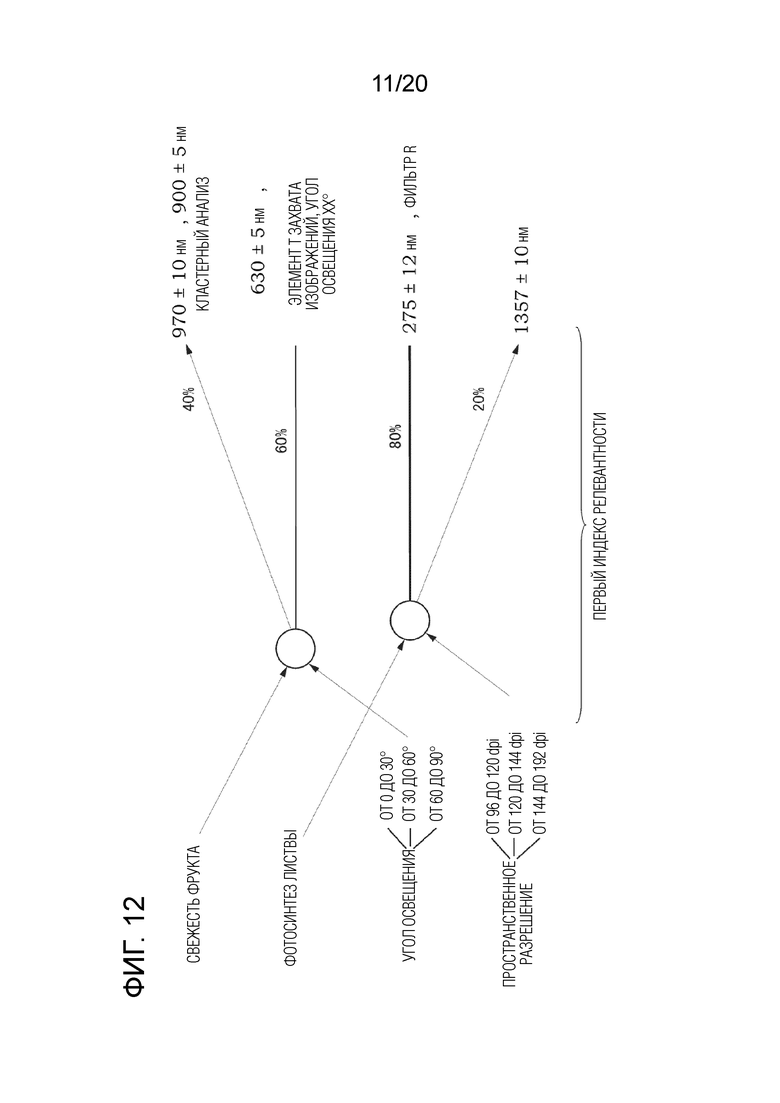
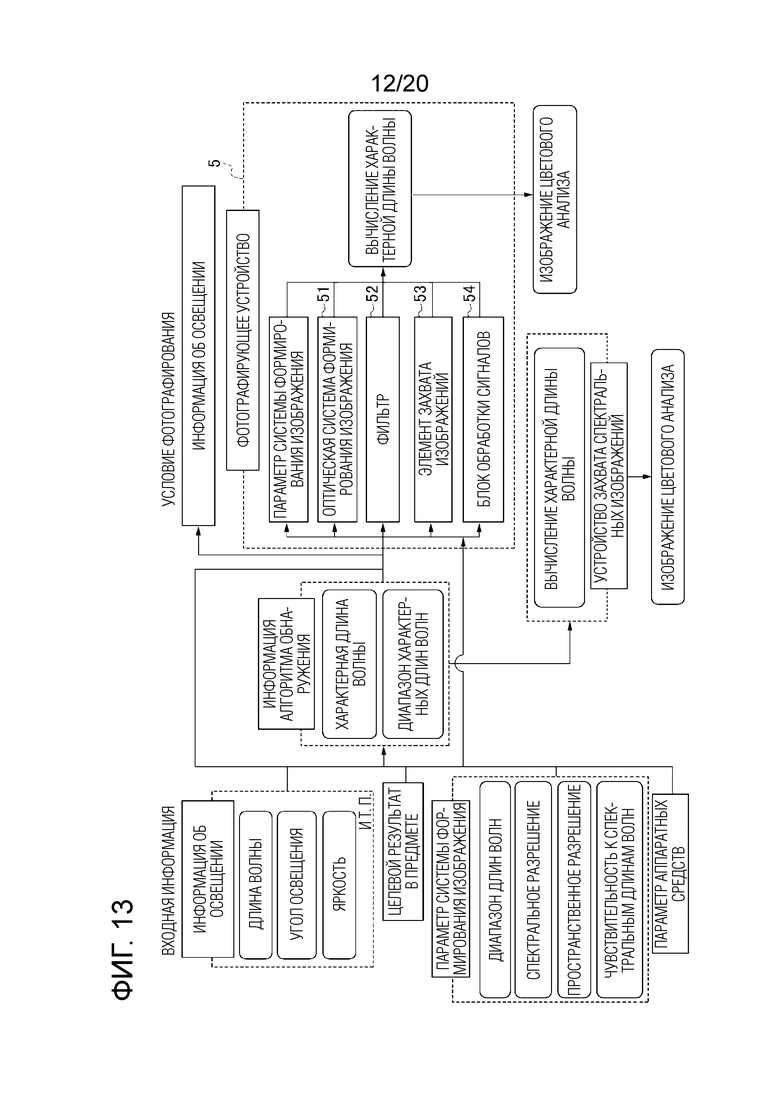
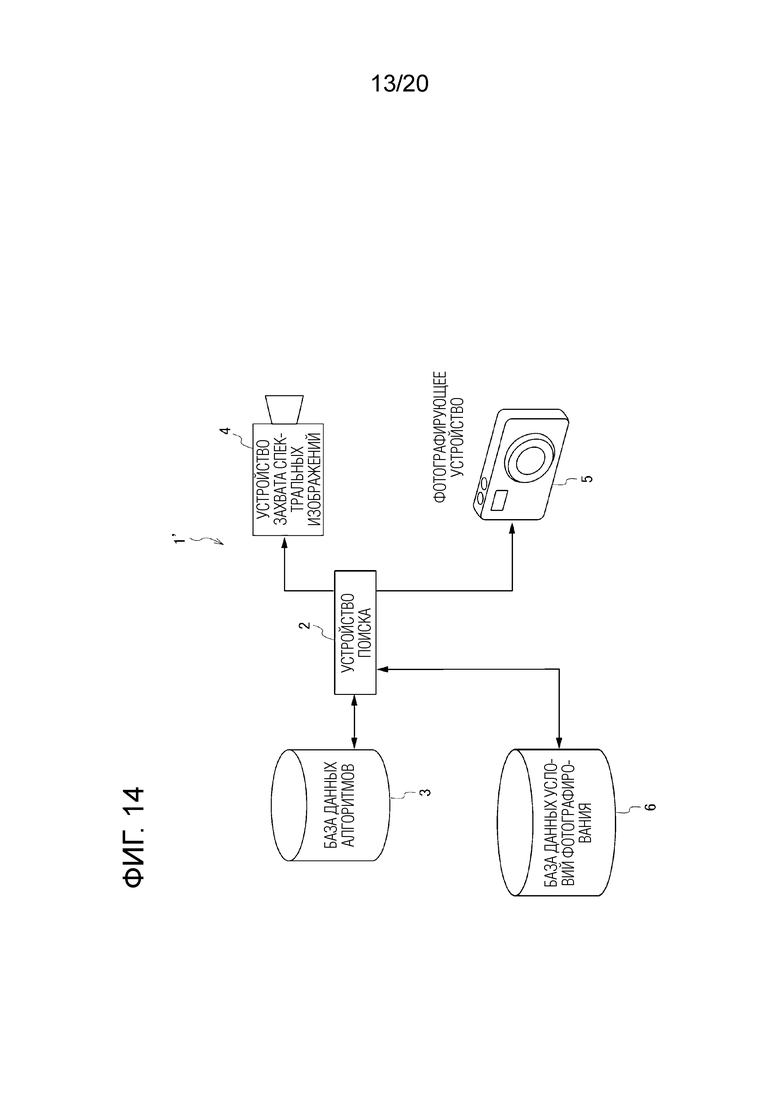
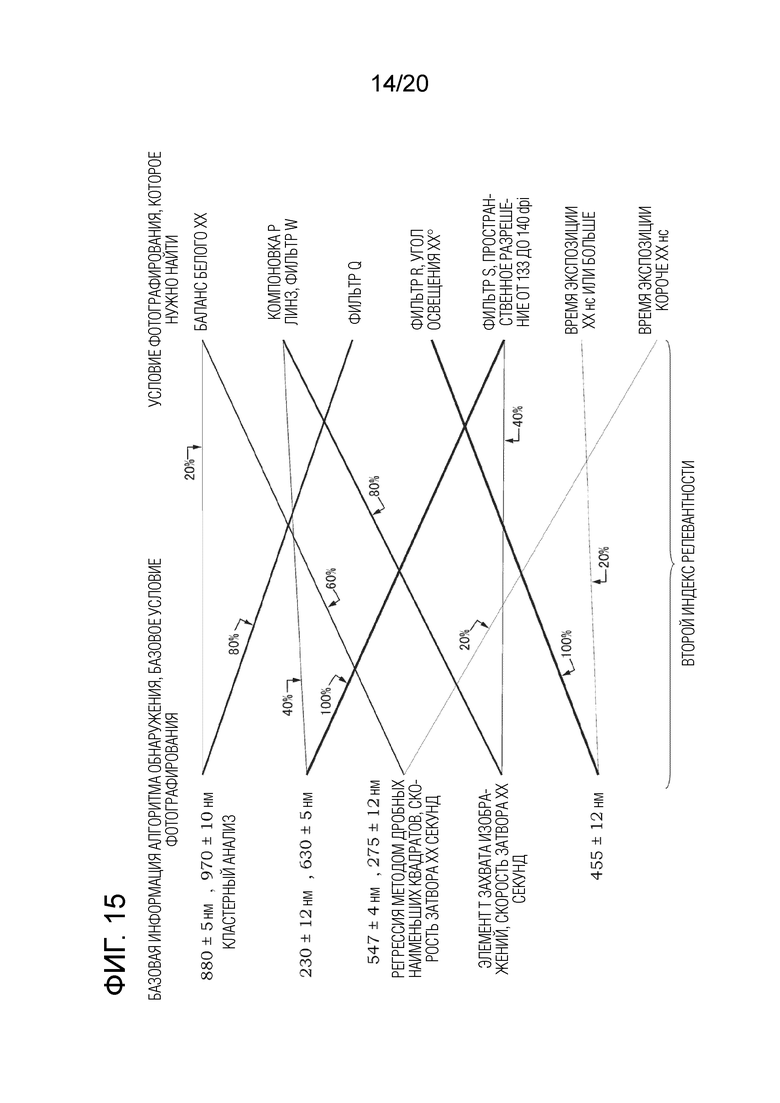
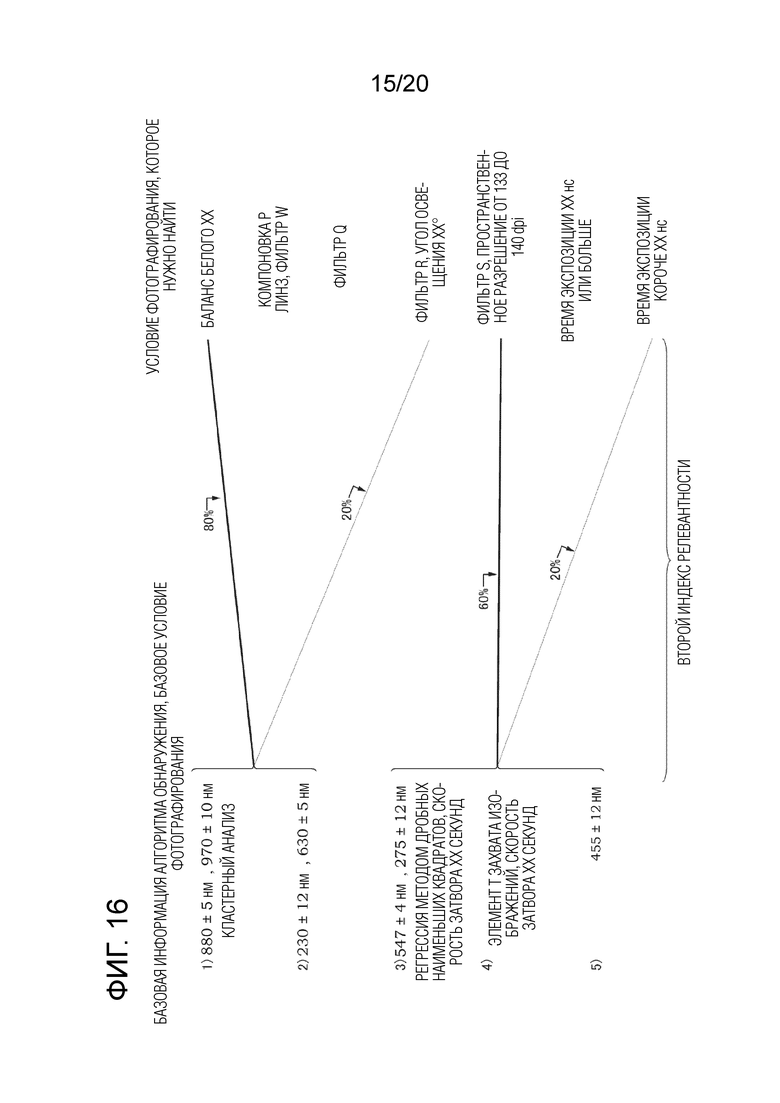
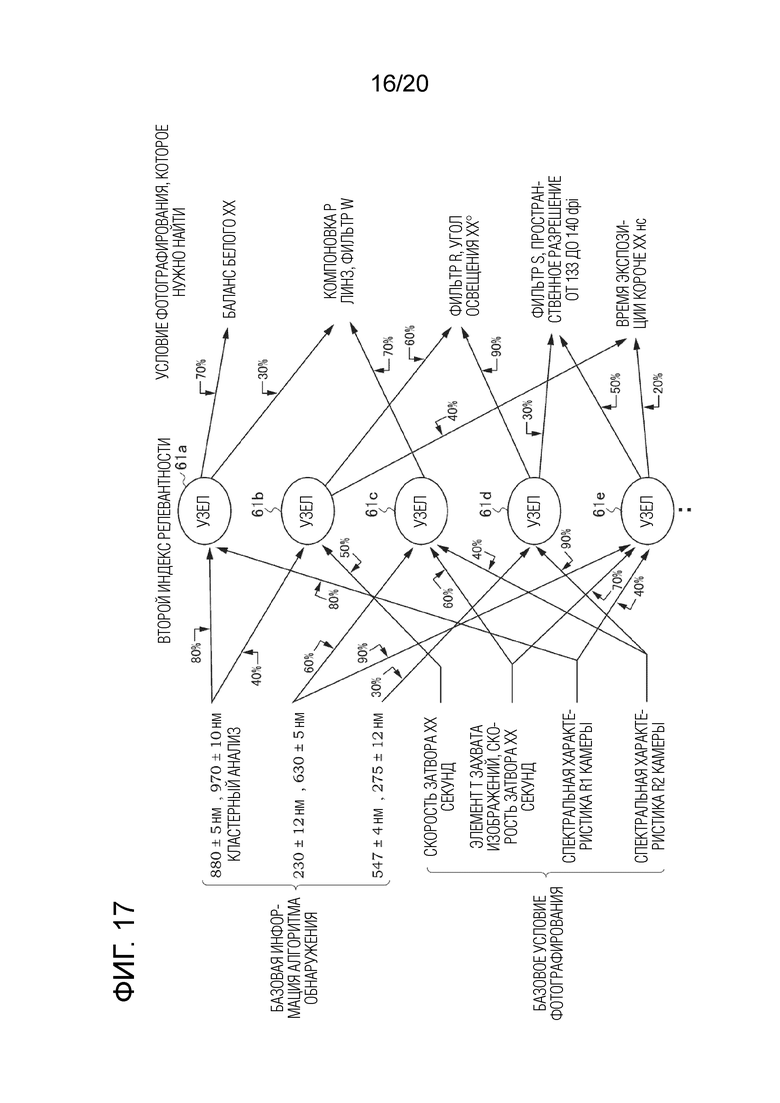
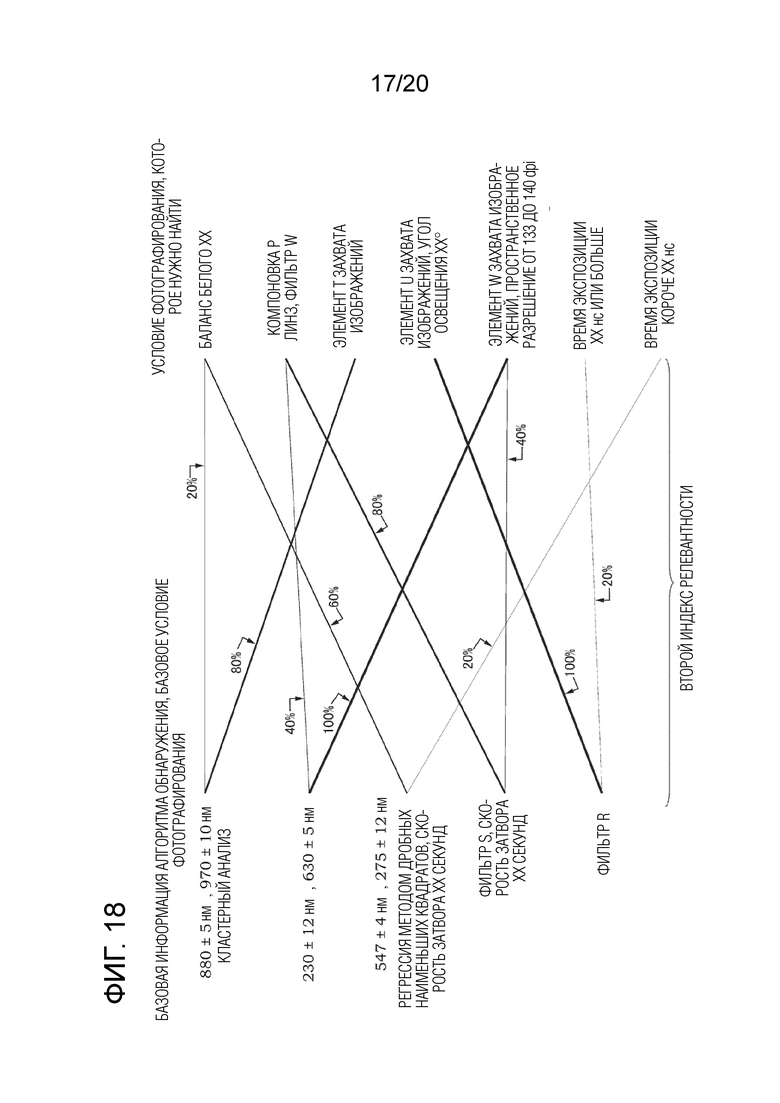
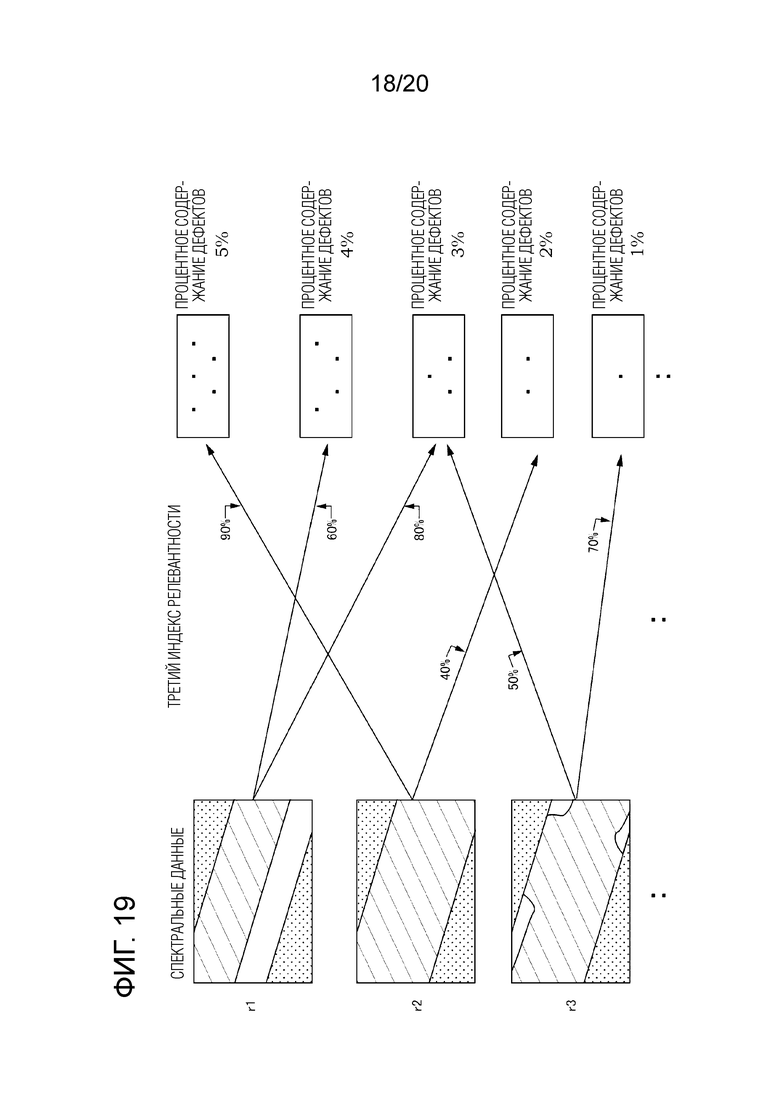
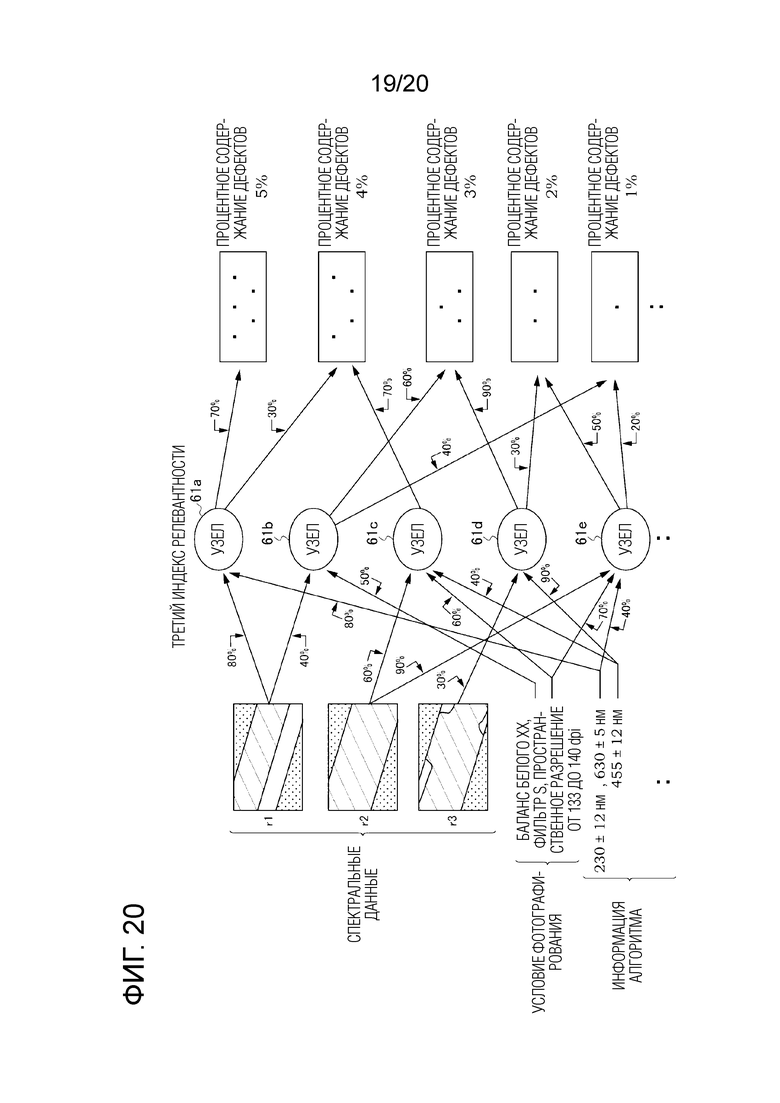
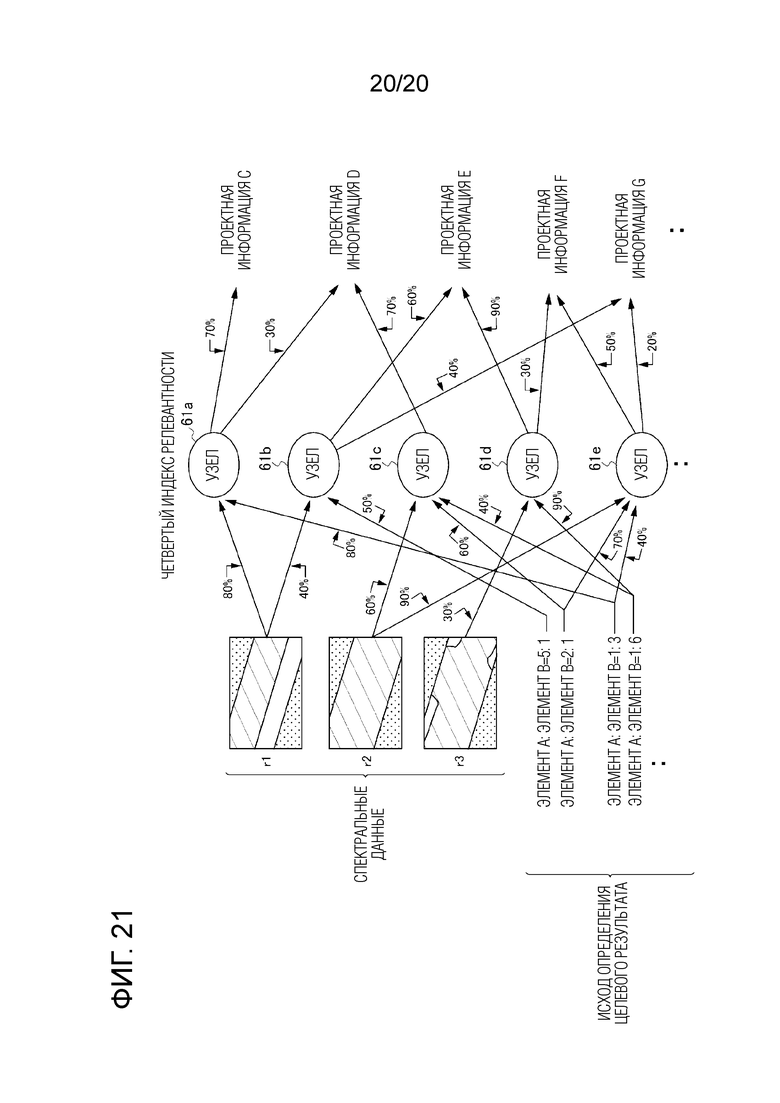
Изобретение относится к области вычислительной техники. Техническим результатом является обеспечение поиска информации для определения целевого результата из фотографируемого предмета. Раскрыта система поиска информации для поиска информации алгоритма обнаружения в спектральных данных, необходимых для определения целевого результата из фотографируемого предмета, при этом система поиска информации содержит: первую реляционную базу данных, сконфигурированную для сохранения заранее первого индекса релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения; средство ввода целевого результата, сконфигурированное для приема входной информации о целевом результате в предмете, который нужно вновь определить; и средство поиска, сконфигурированное для поиска одной или нескольких порций информации алгоритма обнаружения на основе информации о целевом результате, принятой средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных; фотографирующее средство, сконфигурированное для фотографирования предмета на основе информации алгоритма обнаружения, разыскиваемой средством поиска, и создания спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны; средство определения целевого результата, сконфигурированное для определения целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством. 7 н. и 15 з.п. ф-лы, 21 ил.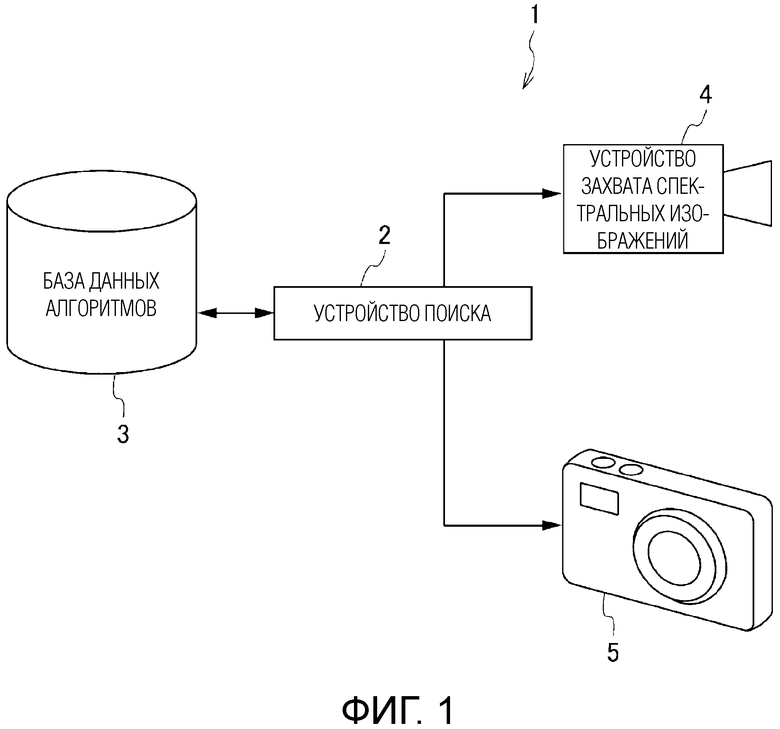
1. Система поиска информации для поиска информации алгоритма обнаружения в спектральных данных, необходимых для определения целевого результата из фотографируемого предмета, при этом система поиска информации содержит:
первую реляционную базу данных, сконфигурированную для сохранения заранее первого индекса релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения;
средство ввода целевого результата, сконфигурированное для приема входной информации о целевом результате в предмете, который нужно вновь определить; и
средство поиска, сконфигурированное для поиска одной или нескольких порций информации алгоритма обнаружения на основе информации о целевом результате, принятой средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных;
фотографирующее средство, сконфигурированное для фотографирования предмета на основе информации алгоритма обнаружения, разыскиваемой средством поиска, и создания спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны;
средство определения целевого результата, сконфигурированное для определения целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством.
2. Система поиска информации по п. 1, в которой
первая реляционная база данных сконфигурирована для сохранения заранее первого индекса релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения, в которой диапазон длин волн, в котором можно определить целевой результат, задается в качестве характерной длины волны, и множество характерных длин волн могут быть заданы.
3. Система поиска информации по п. 1, в которой первая реляционная база данных заранее сохраняет первые индексы релевантности с тремя или более уровнями между каждым целевым результатом и базовым условием фотографирования предмета и сочетанием информации алгоритма обнаружения и условия фотографирования,
средство ввода целевого результата принимает информацию о целевом результате в предмете, который нужно вновь определить, и известное условие фотографирования, и
средство поиска ищет одну или несколько порций сочетания информации алгоритма обнаружения и условия фотографирования на основе информации о целевом результате и известного условия фотографирования, принятых средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных,
фотографирующее средство фотографирует на основе условий фотографирования, найденных средством поиска.
4. Система поиска информации по п. 3, в которой
фотографирующее средство имеет оптическую систему формирования изображения для конденсации света от предмета, чтобы создавать изображение в плоскости изображения у элемента захвата изображений, и имеет фильтр, размещаемый посередине оптического пути к элементу захвата изображений;
фильтр пропускает только свет, принадлежащий заранее установленной области длин волн, и отражает свет из других областей длин волн и может быть сконфигурирован таким образом, что последовательно переключается множество фильтров, имеющих разные области длин волн пропускания,
первая реляционная база данных сохраняет первые индексы релевантности с тремя или более уровнями между каждым целевым результатом и базовым условием фотографирования предмета и сочетанием информации алгоритма обнаружения и условия фотографирования, состоящего из длины волны пропускания фильтра,
фильтр последовательно переключается на основе условия фотографирования, состоящего из длины волны пропускания фильтра, найденного средством поиска.
5. Система поиска информации для поиска условия фотографирования у фотографирующего устройства для определения целевого результата из фотографируемого предмета, при этом система поиска информации содержит:
первую реляционную базу данных, сконфигурированную для сохранения заранее первого индекса релевантности с тремя или более уровнями между каждым целевым результатом в предмете и каждым условием фотографирования;
средство ввода целевого результата, сконфигурированное для приема информации о целевом результате в предмете, который нужно вновь определить; и
средство поиска, сконфигурированное для поиска одного или нескольких условий фотографирования на основе информации о целевом результате, принятой средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных,
фотографирующее средство, сконфигурированное для фотографирования предмета на основе условий фотографирования, найденных средством поиска, и создания спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны;
средство определения целевого результата, сконфигурированное для определения целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством.
6. Система поиска информации по п. 5, в которой первая реляционная база данных заранее сохраняет первые индексы релевантности с тремя или более уровнями между каждым целевым результатом и базовым условием фотографирования предмета и каждым условием фотографирования,
средство ввода целевого результата принимает информацию о целевом результате в предмете, который нужно вновь определить, и известное условие фотографирования и
средство поиска ищет одно или несколько условий фотографирования на основе информации о целевом результате и известного условия фотографирования, принятых средством ввода целевого результата, путем обращения к первому индексу релевантности, сохраненному в первой реляционной базе данных.
7. Система поиска информации по п. 1, дополнительно содержащая вторую реляционную базу данных, которая заранее сохраняет второй индекс релевантности с тремя или более уровнями между каждой порцией информации алгоритма обнаружения и условием фотографирования, которое нужно найти для фотографирующего устройства, для определения целевого результата из фотографируемого предмета,
причем средство поиска ищет одно или несколько условий фотографирования, которые нужно найти, на основе одной или нескольких порций разыскиваемой информации алгоритма обнаружения либо одной или нескольких порций вновь введенной информации алгоритма обнаружения путем обращения ко второму индексу релевантности, сохраненному во второй реляционной базе данных.
8. Система поиска информации по п. 7, в которой вторая реляционная база данных заранее сохраняет второй индекс релевантности с тремя или более уровнями между множеством сочетаний информации алгоритма обнаружения и условия фотографирования, которое нужно найти, и
средство поиска ищет одно или несколько условий фотографирования, которые нужно найти, на основе множества порций разыскиваемой информации алгоритма обнаружения или множества порций вновь введенной информации алгоритма обнаружения путем обращения ко второму индексу релевантности, сохраненному во второй реляционной базе данных.
9. Система поиска информации по п. 7, в которой вторая реляционная база данных заранее сохраняет второй индекс релевантности с тремя или более уровнями между сочетанием каждого из информации алгоритма обнаружения и базового условия фотографирования и условия фотографирования, которое нужно найти, и
средство поиска ищет одно или несколько условий фотографирования, которые нужно найти, на основе одной или нескольких порций разыскиваемой информации алгоритма обнаружения либо одной или нескольких порций вновь введенной информации алгоритма обнаружения и информации об известном условии фотографирования путем обращения ко второму индексу релевантности, сохраненному во второй реляционной базе данных.
10. Система поиска информации по п. 1, в которой средство определения целевого результата дополнительно содержит третью реляционную базу данных, которая заранее сохраняет третий индекс релевантности с тремя или более уровнями между базовыми спектральными данными и исходом определения целевого результата в предмете, и
средство определения целевого результата выполняет определение путем поиска одного или нескольких исходов определения на основе спектральных данных, полученных путем фотографирования фотографирующим средством путем обращения к третьему индексу релевантности, сохраненному в третьей реляционной базе данных.
11. Система поиска информации по п. 10, в которой средство определения целевого результата дополнительно содержит третью реляционную базу данных, которая заранее сохраняет третий индекс релевантности с тремя или более уровнями между сочетанием базовых спектральных данных и базовой информации алгоритма обнаружения и/или базового условия фотографирования и исходом определения целевого результата в предмете, и
средство определения целевого результата выполняет определение путем поиска одного или нескольких исходов определения на основе спектральных данных, полученных путем фотографирования фотографирующим средством, и информации алгоритма обнаружения и/или условия фотографирования, включенных в сочетание, путем обращения к третьему индексу релевантности, сохраненному в третьей реляционной базе данных.
12. Система поиска проектной информации, содержащая
средство поиска проектной информации, сконфигурированное для поиска проектной информации для планирования целевого результата на основе исхода определения целевого результата с помощью средства определения целевого результата в системе поиска информации по любому одному из пп. 1, 10, 11.
13. Система поиска проектной информации по п. 12, дополнительно содержащая четвертую реляционную базу данных, сконфигурированную для сохранения заранее четвертого индекса релевантности с тремя или более уровнями между сочетанием базовых спектральных данных и исхода определения целевого результата в предмете и проектной информацией,
причем средство поиска проектной информации выполняет определение путем поиска одного или нескольких исходов определения на основе спектральных данных, полученных путем фотографирования фотографирующим средством, и исхода определения целевого результата средством определения целевого результата путем обращения к четвертому индексу релевантности, сохраненному в четвертой реляционной базе данных.
14. Система поиска проектной информации по п. 12, в которой
четвертая реляционная база данных имеет три или более уровней между сочетанием базовых спектральных данных и исходом определения целевого результата в предмете и информацией о внешнем виде предмета и проектной информацией,
причем средство поиска проектной информации выполняет определение путем поиска одного или нескольких исходов определения на основе спектральных данных, полученных путем фотографирования фотографирующим средством, и исхода определения целевого результата и информации о внешнем виде предмета средством определения целевого результата путем обращения к четвертому индексу релевантности, сохраненному в четвертой реляционной базе данных.
15. Система поиска проектной информации по п. 14, в которой
информация о внешнем виде может включать в себя так называемую информацию о пространственных характеристиках, а
информация о пространственных характеристиках может быть образована путем объединения пространственной характеристической величины и спектральной характеристической величины.
16. Система поиска информации по любому из пп. 1-9, в которой первая реляционная база данных обновляется путем отражения взаимосвязи в первом индексе релевантности, когда вновь получается взаимосвязь между целевым результатом в предмете и информацией алгоритма обнаружения.
17. Система поиска информации по п. 7, в которой вторая реляционная база данных обновляется путем отражения взаимосвязи во втором индексе релевантности, когда вновь получается взаимосвязь между условием фотографирования у фотографирующего устройства и информацией алгоритма обнаружения.
18. Система поиска информации по любому из пп. 1-10, в которой средство поиска выполняет поиск с использованием искусственного интеллекта.
19. Запоминающее устройство, хранящее программу для поиска информации для поиска информации алгоритма обнаружения, необходимой для определения целевого результата из фотографируемого предмета, при этом программа поиска информации побуждает компьютер исполнить:
этап ввода целевого результата, состоящий в приеме ввода информации о целевом результате в предмете, который нужно вновь определить; и
этап поиска, состоящий в поиске одной или нескольких порций информации алгоритма обнаружения на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения, сохраненному в первой реляционной базе данных;
этап фотографирования, состоящий в фотографировании предмета на основе информации алгоритма обнаружения, разыскиваемой средством поиска, и создании спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны;
этап определения целевого результата, состоящий в определении целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством.
20. Запоминающее устройство, хранящее программу для поиска информации для поиска условия фотографирования у фотографирующего устройства для определения целевого результата из фотографируемого предмета, при этом программа поиска информации побуждает компьютер исполнить:
этап ввода целевого результата, состоящий в приеме входной информации о целевом результате в предмете, который нужно вновь определить; и
этап поиска, состоящий в поиске одного или нескольких условий фотографирования на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и каждым условием фотографирования, сохраненному в первой реляционной базе данных;
этап фотографирования, состоящий в фотографировании предмета на основе условий фотографирования, найденных средством поиска, и создании спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны;
этап определения целевого результата, состоящий в определении целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством.
21. Способ поиска информации для поиска информации алгоритма обнаружения, необходимой для определения целевого результата из фотографируемого предмета, при этом способ поиска информации содержит:
этап ввода целевого результата, на котором принимают ввод информации о целевом результате в предмете, который нужно вновь определить; и
этап поиска, на котором ищут одну или несколько порций информации алгоритма обнаружения на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и информацией алгоритма обнаружения, сохраненному в первой реляционной базе данных;
этап фотографирования, состоящий в фотографировании предмета на основе информации алгоритма обнаружения, разыскиваемой средством поиска, и создании спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны;
этап определения целевого результата, состоящий в определении целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством,
причем каждый из этапов исполняется компьютером.
22. Способ поиска информации для поиска условия фотографирования у фотографирующего устройства для определения целевого результата из фотографируемого предмета, при этом способ поиска информации содержит:
этап ввода целевого результата, на котором принимают входную информацию о целевом результате в предмете, который нужно вновь определить; и
этап поиска, на котором ищут одно или несколько условий фотографирования на основе информации о целевом результате, введенной посредством этапа ввода целевого результата, путем обращения к первому индексу релевантности с тремя или более уровнями между каждым целевым результатом в предмете и каждым условием фотографирования, сохраненному в первой реляционной базе данных;
этап фотографирования, состоящий в фотографировании предмета на основе условий фотографирования, найденных средством поиска, и создании спектрального изображения, которое представляет отражательную способность или пропускаемость предмета, на основе трехмерных спектральных данных, содержащих двумерную пространственную информацию из двумерных спектральных данных в каждом местоположении фотографирования и одномерную информацию о длине волны;
этап определения целевого результата, состоящий в определении целевого результата на основе спектрального изображения, полученного фотографированием фотографирующим средством,
причем каждый из этапов исполняется компьютером.
| JP 2010185719 A, 26.08.2010 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| RU 2014142268 A, 20.05.2016. | |||

