Область техники
Изобретение относится к радарной системе измерения уровня, а также к способу определения уровня заполнения (уровня продукта), использующему предлагаемую систему.
Уровень техники
С тех пор как в 1970-1980-е годы радарное измерение уровня приобрело форму коммерческого продукта, использование непрерывного излучения с частотной модуляцией (Frequency Modulated Continuous Wave, FMCW) стало доминирующим измерительным принципом для приложений, требующих высокой точности. FMCW-измерение включает в себя этап, на котором в резервуар посылают сигнал, сканируемый в частотном интервале порядка нескольких гигагерц. В частности, данный интервал может составлять 25-27 ГГц или 9-10,5 ГГц. Переданный сигнал отражается поверхностью содержимого резервуара (или любой другой границей скачка импеданса), после чего эхо-сигнал с определенной задержкой во времени возвращается к измерительному прибору. Затем его смешивают с переданным сигналом, формируя на выходе смесителя сигнал, частота которого соответствует изменению частоты переданного сигнала, происходящему за время данной задержки. Если используется линейное сканирование, эта разностная частота, именуемая также промежуточной частотой (intermediate frequency, IF), пропорциональна расстоянию до отражающей поверхности. Данный сигнал часто именуют IF сигналом.
В последнее время принцип FMCW был усовершенствован, и сейчас в типичном варианте передают сигнал не с непрерывным сканированием частоты, а с пошагово изменяющейся частотой и практически постоянной амплитудой. После смешивания переданного и принятого сигналов каждым частотным шагом будет обеспечиваться индивидуальный постоянный фрагмент постоянного IF сигнала, состоящего из таких фрагментов, и, тем самым, индивидуальный "отсчет" IF сигнала. Чтобы однозначно определить частоту IF сигнала, состоящего из фрагментов, потребуется количество (N) частот, превышающее количество, задаваемое теоремой отсчетов (теоремой о дискретном представлении). Затем определяют расстояние до отражающей поверхности, используя для этого частоту IF сигнала таким же образом, как в обычной системе FMCW. Для расстояния 30 м, разделенного на 1000-1500 шагов, типичные параметры могут составлять 200-300 IF периодов.
Следует отметить, что семплирование непрерывного IF сигнала, сформированного в результате непрерывного сканирования частоты, также может производиться в форме, пригодной для цифровой обработки.
Обычные системы FMCW (как непрерывные, так и пошаговые) при своей высокой точности являются относительно энергоемкими, что делает их менее пригодными для приложений, в которых энергия питания ограничена. В число примеров таких приложений входят полевые устройства с питанием от двухпроводного интерфейса (такие как контур, рассчитанный на 4-20 мА), а также беспроводные устройства с питанием от внутреннего источника энергии (например от батареи или от солнечного элемента).
Раскрытие изобретения
С учетом изложенного основная задача, решаемая изобретением, состоит в том, чтобы создать способ определения уровня заполнения, тоже реализуемый с использованием измерительного принципа FMCW, но энергетически более эффективный.
Соответственно, согласно первому аспекту изобретения предлагается радарная система измерения уровня, предназначенная для определения уровня заполнения резервуара продуктом и содержащая:
- трансивер (приемопередатчик), выполненный с возможностью генерировать, передавать и принимать электромагнитные сигналы,
- устройство, распространяющее сигнал, которое подключено к трансиверу, распространяет передаваемый сигнал в направлении поверхности продукта и возвращает обратно в трансивер эхо-сигнал, являющийся отражением передаваемого сигнала от данной поверхности, и
- процессорный контур, связанный с трансивером и идентифицирующий уровень заполнения, определяемый по соотношению между передаваемым сигналом и эхо-сигналом, отраженным от поверхности.
При этом трансивер содержит:
- контур, выполненный с возможностью синхронизации фазы (т.е. петлю фазовой синхронизации, Phase-Locked Loop), далее именуемый PLL-контуром, который генерирует выходной сигнал и сконфигурирован с возможностью индикации своего состояния синхронизации, и
- контур изменения частоты, который подключен к PLL-контуру и предназначен для приема выходного сигнала и повышения его частоты, в результате чего формируется передаваемый сигнал, и выполнен с возможностью управляемого переключения в первый режим и второй режим, в которых частота выходного сигнала данным контуром соответственно не повышается или повышается. Кроме того, контур изменения частоты сконфигурирован с возможностью принимать PLL-сигнал, отображающий состояние синхронизации PLL-контура, и выполнять переключение из первого режима во второй в ответ на сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
Согласно второму аспекту изобретения предлагается радарная система измерения уровня, предназначенная для определения уровня заполнения резервуара продуктом и содержащая:
- трансивер, выполненный с возможностью генерировать, передавать и принимать электромагнитные сигналы,
- устройство, распространяющее сигнал, которое подключено к трансиверу, распространяет передаваемый сигнал в направлении поверхности обследуемого продукта и возвращает обратно в трансивер эхо-сигнал, являющийся отражением передаваемого сигнала от данной поверхности, и
- процессорный контур, связанный с трансивером и идентифицирующий уровень заполнения, определяемый по соотношению между передаваемым сигналом и эхо-сигналом, отраженным от поверхности.
При этом трансивер содержит:
- PLL-контур, генерирующий выходной сигнал и сконфигурированный с возможностью индикации своего состояния синхронизации, и
- усилительный контур, который подключен к PLL-контуру, предназначен для приема выходного сигнала и его усиления с формированием передаваемого сигнала, и выполнен с возможностью управляемого переключения в режим низкого усиления, в котором выходной сигнал усиливается усилительным контуром с первым коэффициентом усиления, и в режим высокого усиления, в котором выходной сигнал усиливается усилительным контуром со вторым коэффициентом усиления, превышающим первый коэффициент усиления. Данный усилительный контур сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура, и выполнять переключение из режима низкого усиления в режим высокого усиления в ответ на такой сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
Согласно третьему аспекту изобретения предлагается способ определения уровня резервуара продуктом, использующий радарную систему измерения уровня, которая содержит:
- PLL-контур, генерирующий выходной сигнал, и
- контур изменения частоты, который подключен к PLL-контуру и предназначен для приема выходного сигнала и изменения по меньшей мере одного его параметра с формированием передаваемого сигнала.
При этом предлагаемый способ включает следующие этапы:
- подают в контур изменения сигнала статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура,
- в качестве реакции на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии, изменяют посредством контура изменения сигнала по меньшей мере один параметр выходного сигнала, формируя тем самым передаваемый сигнал,
- распространяют передаваемый сигнал в направлении поверхности продукта,
- принимают эхо-сигнал, являющийся отражением передаваемого сигнала от указанной поверхности, и,
- исходя из соотношения между передаваемым сигналом и эхо-сигналом, отраженным от поверхности, определяют уровень заполнения.
Согласно четвертому аспекту изобретения предлагается радарная система измерения уровня, предназначенная для определения уровня заполнения резервуара продуктом и содержащая:
- трансивер, выполненный с возможностью генерировать, передавать и принимать электромагнитные сигналы,
- устройство, распространяющее сигнал, которое подключено к трансиверу, распространяет передаваемый сигнал в направлении поверхности обследуемого продукта и возвращает обратно в трансивер эхо-сигнал, являющийся отражением передаваемого сигнала отданной поверхности, и
- процессорный контур, связанный с трансивером и идентифицирующий уровень заполнения, определяемый по соотношению между передаваемым сигналом и эхо-сигналом, отраженным от поверхности.
При этом трансивер содержит:
- PLL-контур, генерирующий выходной сигнал и сконфигурированный с возможностью индикации своего состояния синхронизации, и
- контур изменения сигнала, который подключен к PLL-контуру, предназначен для приема выходного сигнала и изменения по меньшей мере одного его параметра с формированием передаваемого сигнала, и выполнен с возможностью управляемого переключения в режим, соответствующий первому изменению сигнала и обеспечивающий первую модификацию по меньшей мере одной характеристики выходного сигнала, и в режим, соответствующий второму изменению сигнала и обеспечивающий вторую модификацию по меньшей мере одной характеристики выходного сигнала, отличную от первой.
Контур изменения сигнала сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура, и в ответ на такой сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии, выполнять переключение из режима, соответствующего первому изменению сигнала, в режим, соответствующий второму изменению сигнала.
PLL-контуром может быть любая модификация контура такого назначения, способная индицировать свое состояние синхронизации. В частности, может быть использован так называемый аналоговый (линейный), цифровой, полностью цифровой или программный PLL-контур.
Термин "состояние синхронизации" в данном контексте может относиться как к синхронизированному, так и к несинхронизированному состояниям. В первом случае выходной сигнал PLL-контура имеет фазу, синхронизированную относительно референтного сигнала, поступающего на вход PLL-контура, а во втором случае фаза выходного сигнала данного контура относительно входного референтного сигнала не синхронизирована.
В настоящее время большинство устройств PLL, поступающих в продажу, содержит контур, детектирующий синхронизацию, и выполнено с выходом, обеспечивающим сигнальную индикацию состояния синхронизации PLL. Пример такого контура приведен в US 5866582, содержание которого посредством ссылки на него полностью включено в данное описание.
Изобретение основано на осознании того, что энергию, которая потребляется радарной системой измерения уровня, использующей PLL-контур, можно сэкономить, проводя изменение выходного сигнала, поступающего из PLL-контура, с учетом состояния синхронизации данного контура. До того как PLL-контур окажется в синхронизированном состоянии, его выходной сигнал, по существу, бесполезен для измерения уровня заполнения. Поэтому энергия, затраченная на получение измененных параметров данного сигнала с целью формирования его передаваемой модификации, распространяемой в направлении поверхности продукта, в большей или меньшей степени расходуется непроизводительно. Авторы изобретения пришли к выводу, что ценная энергия может быть сэкономлена, в частности, путем повышения частоты и/или усиления выходного сигнала только в ответ на индикацию синхронизированного состояния PLL-контура, поскольку только в этом состоянии контур получает возможность генерировать достаточно стабильную частоту.
В радарной системе измерения уровня, выполненной согласно различным вариантам изобретения, поступающий из PLL-контура выходной сигнал пропускают через контур изменения частоты, сконфигурированный с возможностью изменять частоту данного сигнала и, тем самым, обеспечивать формирование передаваемого сигнала, который посредством распространяющего устройства распространяется в резервуаре в направлении поверхности продукта. Для соответствующего изменения частоты необходимо подать в контур изменения частоты энергию питания, которую он будет расходовать.
Если контур изменения частоты выполнен с возможностью принимать сигнал PLL-статуса (статусный PLL-сигнал), отображающий состояние синхронизации PLL-контура, и изменять частоту выходного сигнала в ответ на переданное статусным сигналом указание, что PLL-контур находится в синхронизированном состоянии, может быть уменьшено время, в течение которого контур изменения частоты потребляет энергию. В результате будет понижено количество энергии, расходуемой радарной системой измерения уровня.
Кроме того, во время подачи энергии в PLL-контур частота выходного сигнала, формируемого данным контуром, может изменяться в широких пределах. За счет того, что изменения частоты происходят только в ответ на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии, может быть уменьшена вероятность испускания РЧ энергии вне выбранных частотных полос.
В частности, до начала сканирования частоты PLL-контуру может потребоваться определенный период времени, прежде чем частота его выходного сигнала стабилизируется. Данный период может составлять примерно 0,5 мс и зависеть от различных факторов, таких как параметры схемы PLL-контура (например размеры и тип фильтров контура). В течение этого периода времени PLL-контур находится в несинхронизированном состоянии, и его выходной сигнал еще не может быть пригоден для применения с целью определения уровня заполнения. В различных аспектах изобретения контур изменения частоты выходного сигнала PLL-контура не будет выполнять свою функцию до тех пор, пока данный сигнал не стабилизируется (т.е. до тех пор, пока статусный PLL-сигнал не укажет, что PLL-контур находится в синхронизированном состоянии).
Чтобы увеличить частоту сигнала, формируемого PLL-контуром, до величины, пригодной для измерения уровня заполнения, предусмотрена возможность выполнить контур изменения частоты по меньшей мере с одним умножителем частоты. Например, такой умножитель может быть сконфигурирован так, чтобы при умножении частота выходного сигнала умножалась на коэффициент, равный по меньшей мере двум.
В некоторых вариантах контур изменения частоты может содержать суммирующую схему, сконфигурированную с возможностью прибавлять частоту сигнала, формируемого PLL-контуром, к частоте вспомогательного сигнала. В частности, суммирующая схема может представлять собой смеситель, выполняющий прибавление частоты выходного сигнала PLL-контура (например 2-4 ГГц) к частоте (например 22 ГГЦ), выдаваемой осциллятором с фиксированной частотой.
Изобретение в своих различных аспектах особенно полезно во время описанного инициирования (активирования) PLL-контура. После начала сканирования частоты и перевода PLL-контура в режим изменения частоты выходного сигнала в виде относительно небольших частотных шагов, может потребоваться, чтобы данный контур оставался в синхронизированном состоянии. Однако согласно различным вариантам для PLL-контура может быть предусмотрена возможность во время сканирования частоты функционировать в своем несинхронизированном состоянии. В таких вариантах контур изменения частоты может быть сконфигурирован и подключен так, чтобы изменение частоты сигнала, выходящего из PLL-контура, начиналось в ответ на статусный сигнал данного контура, указывающий, что контур находится в синхронизированном состоянии, а затем продолжалось в процессе сканирования частоты, даже если контур в это время перейдет в несинхронизированное состояние.
Все, что было сказано выше про контур изменения частоты и его функционирование, можно в различных вариантах осуществления, в дополнение или альтернативно, отнести и к контуру управления усилением, который может быть предусмотрен в радарной системе измерения уровня.
Следует отметить, что распространяющим устройством могут быть любые пригодные в данном контексте излучающие антенны или зонды на основе передающей линии. В число примеров антенн входят рупорная антенна, стержневая антенна, решетчатая антенна, параболическая антенна и другие подобные средства. В число примеров зондов на основе передающей линии входят однопроводная линия (линия Губо), двухпроводная передающая линия, коаксиальный зонд и другие подобные средства.
Кроме того, следует отметить, что процессорный контур может быть выполнен в виде одного устройства или в виде нескольких устройств, функционирующих совместно.
Согласно различным вариантам изобретения процессорный контур может быть выполнен с возможностью определять уровень заполнения, исходя из разности фаз передаваемого сигнала и эхо-сигнала, отраженного от поверхности.
Согласно различным вариантам изобретения PLL-контур может иметь первый выход, на котором формируется выходной сигнал, и второй выход, на котором формируется сигнал о состоянии синхронизации, отображающий состояние синхронизации данного контура, а контур изменения частоты может иметь первый вход, подключенный к первому выходу PLL-контура и предназначенный для приема выходного сигнала, и второй вход, подключенный ко второму выходу PLL-контура и предназначенный для приема сигнала о состоянии синхронизации.
В этих вариантах сигнал о состоянии синхронизации напрямую поступает из PLL-контура в контур изменения частоты и может быть использован, например, для управления подачей энергии в контур изменения частоты. Такой схемой обеспечивается быстрое управление данным контуром, так что измерение можно начинать практически сразу же после достижения PLL-контуром своего синхронизированного состояния.
В различных вариантах статусный PLL-сигнал может иметь в своей основе статусный сигнал о состоянии синхронизации, поступающий из PLL-контура, и сигнал, поступающий из процессорного контура. Таким образом, функционированием контура изменения частоты можно управлять с учетом дополнительных критериев, чем обеспечивается повышение гибкости управления.
Согласно одному из вариантов осуществления сигнал, поступающий из процессорного контура, может быть сигналом о включении PLL-контура, указывающим, что PLL-контур включен.
Например, контуром изменения частоты можно управлять так, чтобы он начинал изменять частоту выходного сигнала, поступающего из PLL-контура, в ответ на сигнал о состоянии синхронизации, тоже поступающий из PLL-контура и указывающий, что PLL-контур находится в синхронизированном состоянии, и на сигнал включения PLL-контура, поступающий из процессорного контура и указывающий, что PLL-контур включен. В этом примере статусный PLL-сигнал может соответствовать выходному сигналу, поступающему от логического элемента И, при том что входными сигналами данного элемента являются статусный PLL-сигнал и сигнал включения PLL-контура. Это может быть полезно для тех устройств на базе PLL, которые формируют сигнал из сигнала о состоянии синхронизации, чтобы индицировать "синхронизированное состояние" как исходное состояние, когда на PLL-контур подано питание, но он не функционирует. Возможен также вариант, в котором выход PLL-контура, предназначенный для формирования сигнала о состоянии синхронизации, используется и для формирования других сигналов, генерируемых данным контуром в соответствии с его схемой. В этом случае также может оказаться полезным управлять контуром изменения частоты, исходя из сигнала на выходе PLL-контура и другого сигнала, такого как сигнал включения PLL-контура, поступающий из процессорного контура.
Могут быть применены и другие логические операции, приводящие к достижению других результатов. Например, чтобы дать возможность PLL-контуру описанным выше образом функционировать в своем несинхронизированном состоянии сразу после завершения активирования с запуском сканирования частоты, можно использовать операцию ИЛИ.
Кроме того, согласно различным вариантам изобретения PLL-контур может иметь первый выход, на котором формируется выходной сигнал, и второй выход, на котором формируется сигнал о состоянии синхронизации, отображающий состояние синхронизации данного контура. Соответственно, предусмотрена возможность контур изменения частоты для приема выходного сигнала подключить к первому выходу PLL-контура, а процессорный контур для приема сигнала о состоянии синхронизации подключить ко второму выходу PLL-контура. В этих вариантах процессорный контур может быть сконфигурирован с возможностью генерировать на основе сигнала о состоянии синхронизации статусный PLL-сигнал, причем для передачи данного сигнала в контур изменения частоты предусмотрена возможность подключить эти контуры друг к другу.
Согласно различным вариантам изобретения радарная система измерения уровня может содержать усилительный контур, предназначенный для усиления передаваемого сигнала. Данный контур может быть сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура, и усиливать передаваемый сигнал в ответ на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
В дополнение к этому, радарная система измерения уровня может содержать контур управления частотой, подключенный к PLL-контуру и предназначенный для такого управления данным контуром, при котором он генерирует выходной сигнал в виде последовательности различных частот.
Предусмотрена возможность выполнить контур управления частотой так, чтобы соответствующее управление PLL-контуром обеспечивало в нем генерирование выходного сигнала в виде развертки частот с монотонно изменяющейся частотой.
Развертка по частоте может состоять из множества шагов перестройки частоты.
Контур управления частотой можно установить в процессорном контуре или, в альтернативном варианте, выполнить его в виде отдельного устройства.
Далее, желательно дополнительно снабдить систему измерения уровня собственным источником или накопителем энергии, обеспечивающим электрическую энергию для функционирования данной системы. Такое устройство может представлять собой, например, батарею и/или суперконденсатор.
Кроме того, система измерения уровня может дополнительно содержать беспроводной коммуникационный контур, такой как радиотрансивер, обеспечивающий для пользователя беспроводную коммуникацию с удаленной системой.
Согласно различным вариантам осуществления способы, использующие различные аспекты изобретения, могут включать этапы приема сигнала активирования и, в ответ на данный сигнал, отправления сигнала управления частотой в PLL-контур.
Сигнал активирования может быть получен от устройства, внешнего по отношению к радарной системе измерения уровня, например от удаленного центра управления. В альтернативном варианте такой сигнал может быть сгенерирован внутри данной системы, например, в связи с перерывом в работе.
Таким образом, в обобщенном виде изобретение относится к радарной системе измерения уровня, содержащей PLL-контур, генерирующий выходной сигнал и способный индицировать свое состояние синхронизации. Кроме того, в системе предусмотрен контур изменения сигнала, который подключен к PLL-контуру и предназначен для приема выходного сигнала и изменения по меньшей мере одного его параметра, в результате чего формируется передаваемый сигнал. Контур изменения сигнала сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура, и изменять по меньшей мере один параметр выходного сигнала в ответ на данный статусный сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
Краткое описание чертежей
Далее эти и другие аспекты изобретения будут описаны более подробно со ссылками на прилагаемые чертежи, иллюстрирующие пример варианта осуществления изобретения.
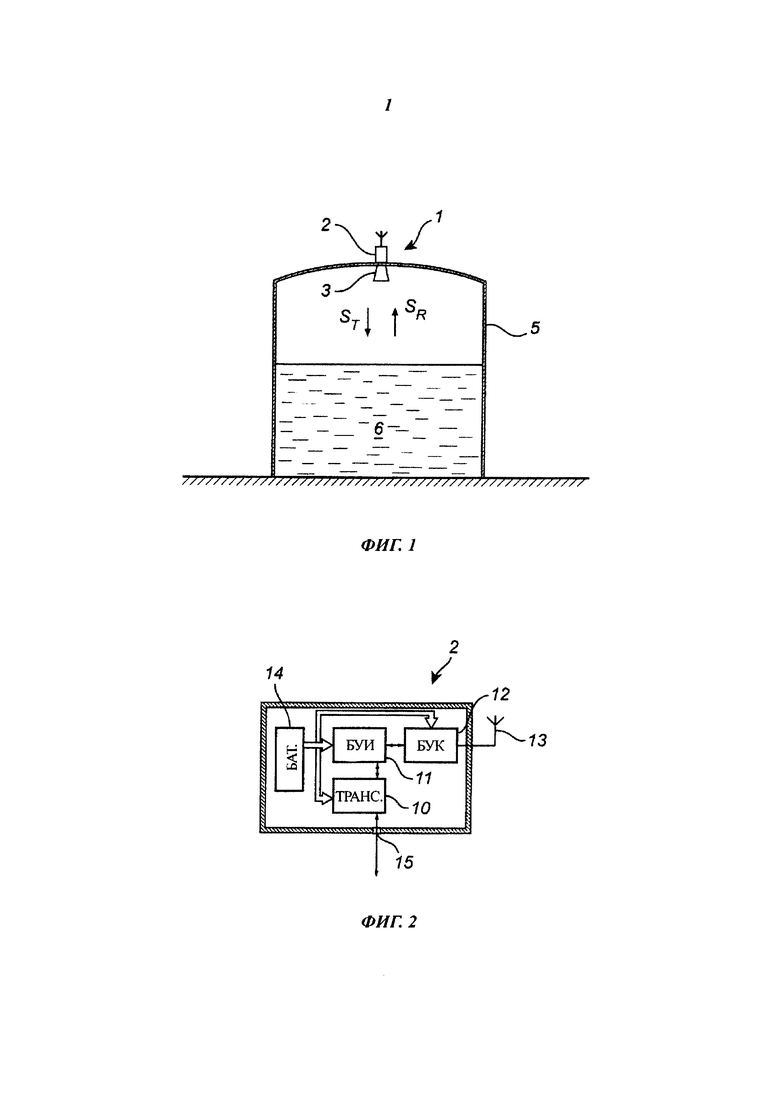
На фиг. 1 схематично представлен пример резервуара, оборудованного вариантом радарной системы измерения уровня, выполненной согласно изобретению и предназначенной для определения уровня заполнения резервуара продуктом.
На фиг. 2 представлена блок-схема измерительного блока, входящего в состав системы по фиг. 1.
На фиг. 3 представлена блок-схема радарной системы измерения уровня, выполненной согласно варианту изобретения.
На фиг. 4 представлена блок-схема, иллюстрирующая вариант способа согласно изобретению.
На фиг. 5 схематично проиллюстрирован пример передаваемого сигнала.
На фиг. 6 схематично проиллюстрирован пример измеряемого сигнала, сформированного на основе передаваемого сигнала и эхо-сигнала, отраженного от поверхности.
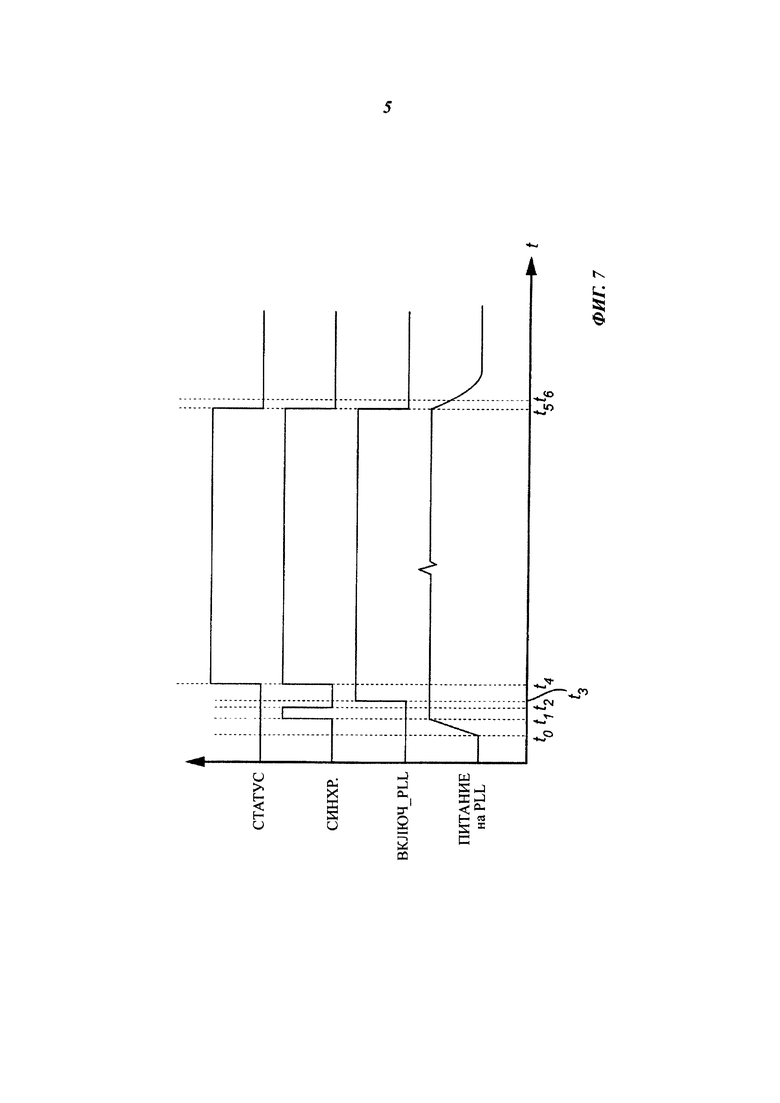
На фиг. 7 приведен график, иллюстрирующий пример временной диаграммы управления трансивером по фиг. 3, осуществляемого с учетом состояния синхронизации PLL-контура.
Осуществление изобретения
На фиг. 1 схематично проиллюстрирована радарная система 1, измеряющая уровень заполнения резервуара и содержащая измерительный блок 2 и устройство распространения сигнала (распространяющее устройство), представленное в виде рупорной антенны 3. Система 1 установлена на верхней стенке резервуара 5 и предназначена для определения уровня его заполнения продуктом 6.
В процессе измерения данного уровня радарная система 1 посредством рупорной антенны 3 посылает передаваемый электромагнитный сигнал ST в направлении поверхности 7 продукта 6, где сигнал ST будет отражаться в виде электромагнитного эхо-сигнала. Затем, исходя из суммарного времени прохождения передаваемого сигнала и эхо-сигнала, отраженного от поверхности (времени прохождения от радарной системы 1 измерения уровня до поверхности 7 продукта 6 и обратно), определяют расстояние до поверхности 7. Это расстояние, обычно именуемое высотой паровоздушного пространства резервуара, можно получить прямо из данного времени прохождения. Уровень заполнения может быть определен из этого расстояния (высоты паровоздушного пространства) и известных размеров резервуара 5.
В случае применения радарной системы измерения уровня, выполненной согласно различным вариантам изобретения, время прохождения определяют, исходя из разности фаз между передаваемым сигналом, модулированным по фазе, и сигналом, отраженным от поверхности. Измерительную схему этого типа часто именуют системой FMCW.
Как показано на упрощенной блок-схеме по фиг. 2, измерительный блок 2 радарной системы 1 по фиг. 1, предназначенной для измерения уровня, содержит трансивер (ТРАНС) 10, блок 11 управления измерениями (БУИ), беспроводной блок 12 управления коммуникациями (БУК), коммуникационную антенну 13, средство, аккумулирующее энергию, такое как батарея (БАТ) 14, и ввод 15 в резервуар.
Как схематично проиллюстрировано на фиг. 2, БУИ 11 управляет трансивером 10, обеспечивая тем самым генерирование, передачу и прием электромагнитных сигналов. Передаваемые сигналы проходят через ввод 15 к рупорной антенне 3 (на фиг. 2 не изображена), а принятые сигналы проходят от антенны 3 через ввод 15 к трансиверу 10.
При рассмотрении фиг. 1 уже упоминалось, что БУИ 11 определяет уровень заполнения резервуара 5 продуктом 6, используя для этого разность фаз между передаваемым сигналом ST и эхо-сигналом SR, отраженным от поверхности. Значение уровня заполнения передается на внешнее устройство, такое как управляющий центр, от БУИ 11 посредством БУК 12 через коммуникационную антенну 13. В желательном варианте радарная система 1 измерения уровня может соответствовать коммуникационному протоколу WirelessHart (документ IEC 62591).
Хотя представленный на данном чертеже измерительный блок 2 содержит средство 14, аккумулирующее энергию, и такие устройства, как БУК 12 и коммуникационная антенна 13, обеспечивающие беспроводную коммуникацию, должно быть понятно, что подачу энергии и коммуникацию можно обеспечить и другим образом, в частности, по линиям связи (например, рассчитанным на 4-20 мА).
Локальное средство, аккумулирующее энергию, необязательно состоит только из батареи. Альтернативно или в комбинации с ней в конструкцию такого средства может входить конденсатор или суперконденсатор.
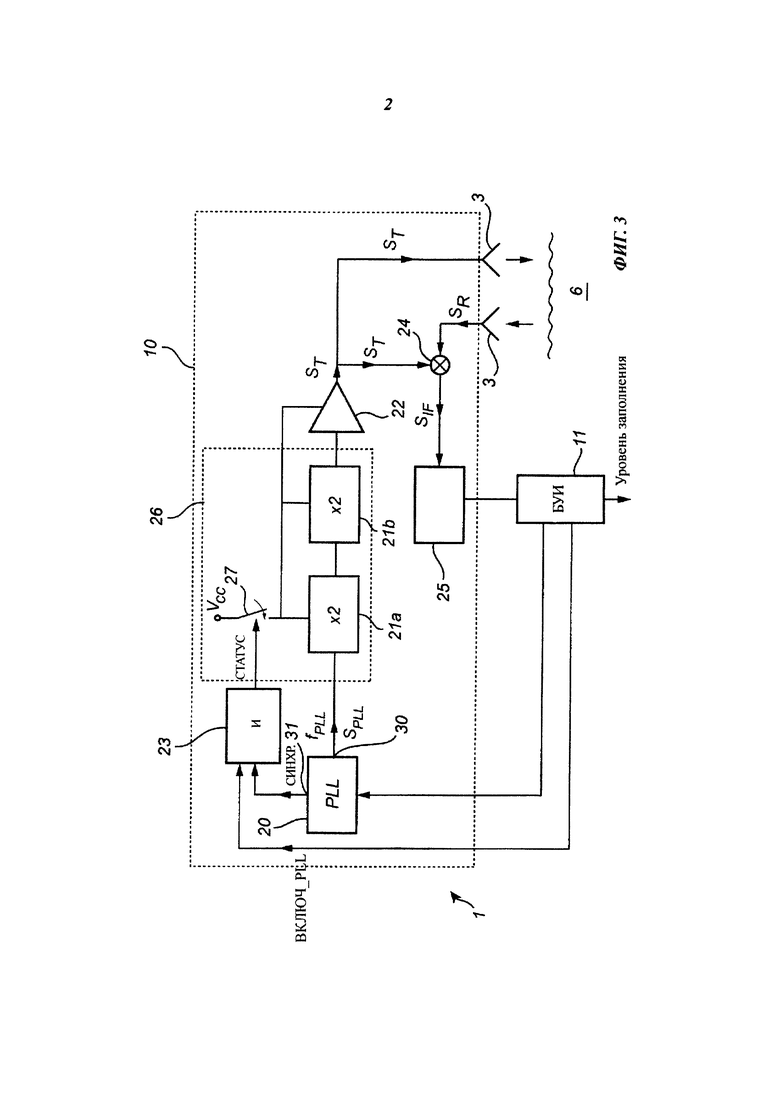
Далее радарная система 1 по фиг. 1, выполняющая измерения уровня, и, в особенности, трансивер 10, будут описаны более подробно со ссылками на блок-схему по фиг. 3.
Как схематично проиллюстрировано на фиг. 3, в схему трансивера 10 включены: PLL-контур 20 (т.е. контур фазовой автоматической подстройки частоты, ФАПС), контур изменения частоты, низкошумящий усилитель 22 передатчика, контур 23 управления передатчиком, смеситель 24 и измерительный контур 25. В примере, представленном на фиг. 3, контур изменения частоты содержит два умножителя 21а, 21b частоты и ключ 27, который под управлением контура 23 подключает умножители 21а, 21b и усилитель 22 к источнику напряжения VCC, как это схематично показано на фиг. 3.
У PLL-контура 20 имеется первый выход 30 для выдачи выходного PLL-сигнала SPLL с выходной частотой fPLL и второй выход 31 для выдачи сигнала СИНХРОНИЗАЦИЯ (сигнала состояния синхронизации данного контура).
Выходной PLL-сигнал SPLL проходит через два умножителя 21а, 21b частоты (в примере, проиллюстрированном на фиг. 3, оба умножителя 21а, 21b являются удвоителями частоты) и усилитель 22 передатчика. Если, как это показано на фиг. 3, ключ 27 разомкнут, умножители 21а, 21b и усилитель 22 на выходной PLL-сигнал SPLL не реагируют.
Однако, если ключ 27 замкнут, умножители 21а, 21b умножают частоту выходного PLL-сигнала SPLL, а усилитель передатчика усиливает этот сигнал. Результатом этих операций является передаваемый сигнал ST с частотой fT передачи, которая в 4 раза превышает частоту fPLL сигнала на выходе PLL-контура 20.
Затем передаваемый сигнал ST через антенну 3 распространяется в направлении продукта 6, падает на его поверхность 7 и отражается от нее в виде эхо-сигнала SR, который возвращается в направлении радарной системы измерения уровня и принимается антенной 3.
Как схематично проиллюстрировано на фиг. 3, оба сигнала, т.е. отраженный от поверхности эхо-сигнал SR и передаваемый сигнал ST, поступают в смеситель, выдающий сигнал SIF с промежуточной частотой, соответствующей разности частот сигнала ST и сигнала SR.
Сигнал SIF с промежуточной частотой проходит в измерительный контур 25, где подвергается аналоговой обработке с последующим преобразованием из аналогового в цифровой сигнал, поступающий в БУИ 11. На последнем этапе БУИ 11 на основе цифрового сигнала на промежуточной частоте определяет уровень заполнения резервуара продуктом 6.
Как упоминалось выше, ключ 27 управляется контуром 23 управления передатчиком. В возможном варианте данный контур выполнен в виде логического элемента И, который выдает сигнал статуса PLL (сигнал СТАТУС). Данный сигнал предназначен для управления ключом, которое выполняется на основе операции И в ответ на сигнал СИНХРОНИЗАЦИЯ (далее сигнал СИНХР.) о состоянии синхронизации, получаемый со второго выхода 31 PLL-контура 20, и на сигнал включения PLL (сигнал ВКЛЮЧ_PLL) от БУИ 11. В варианте по фиг. 3 питание будет подаваться на умножители 21а, 21b частоты и усилитель 22 передатчика только тогда, когда PLL-контур 20 включен (активирован) блоком БУИ и находится в синхронизированном состоянии.
Антенна 3 может состоять из раздельных компонентов, как это показано на фиг. 3, или представлять собой единственную антенну. Во втором из этих вариантов предусмотрена возможность дополнительно снабдить трансивер 10 контуром, разделяющим передаваемый и принимаемый сигналы.
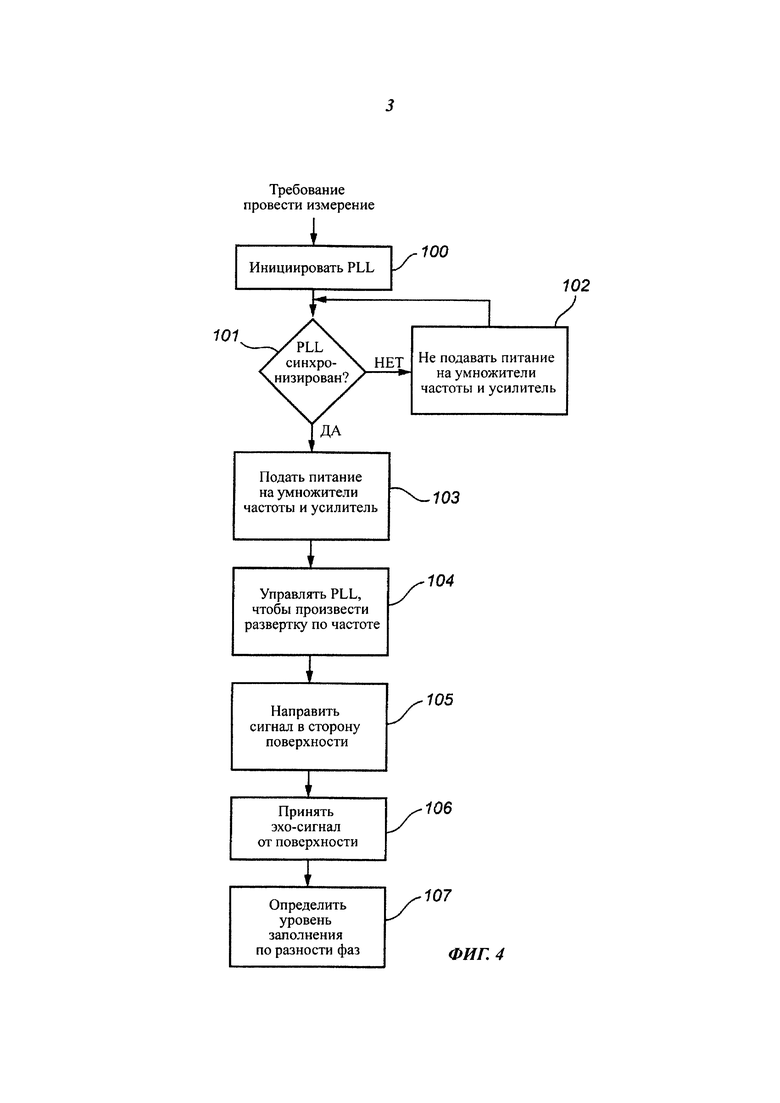
Далее функционирование радарной системы 1 измерения уровня будет описано более подробно со ссылками на блок-схему по фиг. 4, а также на фиг. 2, 3, 5, 6 и 7.
В ответ на прием требования на проведение измерения, которое может поступить, например, из БУК 12 (см. фиг. 2), на первом этапе 100 блок БУИ 11 активирует PLL-контур 20 посредством подачи энергии, сигнала ВКЛЮЧ_PLL и сигнала, указывающего желательную частоту fPLL выходного сигнала (выходную частоту) для PLL-контура 20.
На следующем этапе 101 определяют, синхронизирован ли PLL-контур 20 с желательной выходной частотой fPLL, другими словами, в каком состоянии он находится - в синхронизированном или несинхронизированном.
В PLL-контуре часто предусматривают наличие контура, отображающего состояние синхронизации. Такие PLL-контуры, к которым относится, например, контур, схематично изображенный на фиг. 3, могут иметь специальный выход для сигнала СИНХР. о состоянии синхронизации, указывающего, в каком состоянии находится данный PLL-контур - в синхронизированном или несинхронизированном.
Если на этапе 101 выяснится, что PLL-контур все еще находится в своем несинхронизированном состоянии, питание на умножители 21а, 21b частоты и усилитель 22 передатчика не подается (этап 102), и выполнение способа возвращается на этап 101, на котором продолжается проверка ситуации с этими состояниями PLL-контура 20.
Если на этапе 101 будет определено, что PLL-контур 20 находится в синхронизированном состоянии, способ переходит на этап 103, на котором на умножители 21а, 21b частоты и усилитель 22 передатчика подают энергию питания.
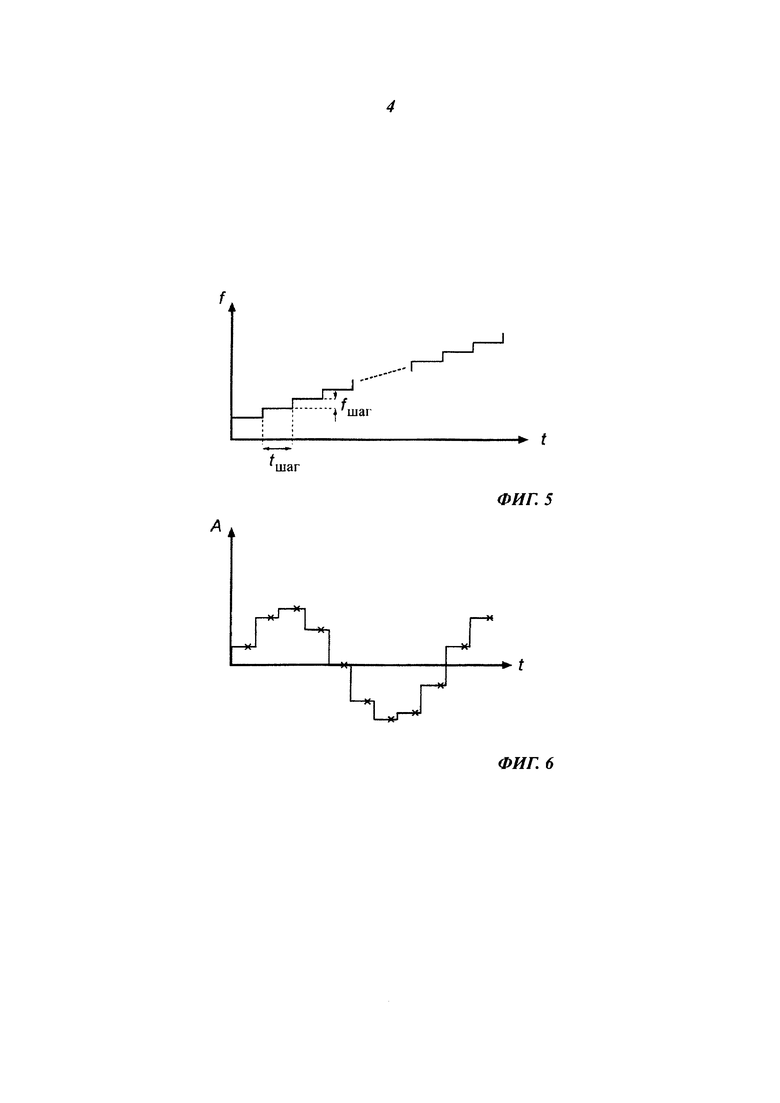
После успешного активирования PLL-контура 20 и подачи питания на умножители 21а, 21b частоты и усилитель 22 передатчика блок БУИ 11 на этапе 104 управляет контуром 20 так, чтобы обеспечить выдачу выходного PLL-сигнала SPLL. с изменяющейся во времени выходной частотой fPLL. Вслед за кратным увеличением частоты и усилением сигнала, выполняемыми, соответственно, умножителями 21а, 21b и усилителем 22 передатчика, может быть получен, в частности, просканированный по частоте передаваемый сигнал ST, проиллюстрированный на фиг. 5, где схематично представлен фрагмент пошаговой развертки по частоте. При этом PLL-контур принимает сигнал управления, указывающий конкретную желательную частоту, выдерживаемую в течение продолжительности tstep шага, после чего сигнал управления изменяют, изменяя частоту передаваемого сигнала с интервалом fstep, соответствующим переходу на следующий шаг. Длительность tstep может составлять, например, 8 мкс, а интервал fstep может быть равен, например, 4 МГц.
Следует отметить, что передаваемый сигнал ST, схематично проиллюстрированный на фиг. 5, идеализирован. В типичной ситуации реальный сигнал не воспроизводится сразу же за сигналом управления частотой, поскольку обычно имеет место некоторый переходный период, прежде чем частота fT передаваемого сигнала ST выйдет на стабильный уровень.
На этапе 105 передаваемый сигнал ST с разверткой по частоте (в частности, сигнал ST по фиг. 5) распространяется через антенну 3 в направлении поверхности 7 продукта 6.
На этапе 106 принимают эхо-сигнал SR, образующийся в результате отражения передаваемого сигнала ST от поверхности 7 продукта 6, и, в завершение, на этапе 107 определяют уровень заполнения, исходя из разности фаз сигналов ST и SR.
При посылке передаваемого сигнала St, проиллюстрированного на фиг. 5, в направлении поверхности 7 продукта 6 отраженный от поверхности эхо-сигнал SR по сравнению с передаваемым сигналом ST будет иметь частоту, изменяющуюся во времени с той же продолжительностью tstep шага, и тот же шаг fstep по частоте, но с отставанием во времени, соответствующим времени прохождения сигнала SR.
Затем производят смешивание передаваемого сигнала ST и эхо-сигнала SR, отраженного от поверхности, получая в результате сигнал SIF с промежуточной частотой, схематично проиллюстрированный на фиг. 6.
По результатам семплирования сигнала SIF с промежуточной частотой, которое выполняется в моменты, обозначенные на фиг. 6, как "x", БУИ 11 получает возможность определить, на основании сигнала S!F с промежуточной частотой, время прохождения и, таким образом, расстояние до поверхности 7 продукта 6.
В завершение будет рассмотрен, со ссылками на приведенную на фиг. 7 диаграмму, пример последовательности управляющих операций, которую используют для управления питанием, подаваемым на умножители 21а, 21b частоты и усилитель 22 передатчика.
В соответствии с блок-схемой по фиг. 3 на данной диаграмме представлены, снизу вверх, следующие операции:
- подача питания на PLL-контур 20 (ПИТАНИЕ на PLL),
- подача сигнала ВКЛЮЧ_PLL от БУИ 11 на PLL-контур 20,
- подача сигнала СИНХР. о состоянии синхронизации от PLL-контура 20 в контур 23 управления передатчиком и
- подача сигнала СТАТУС, характеризующего состояние PLL, от контура 23 управления передатчиком на ключ 27.
На PLL-контур 20 питание подают в момент времени t0. В момент времени t1 напряжение, поданное на контур 20, выходит на уровень, достаточно высокий для обеспечения функционирования этого контура. В данном конкретном примере выход 31 для выдачи сигнала СИНХР. используют также для выдачи одного или нескольких других сигналов в зависимости от конкретной конфигурации контура 20. В примере, проиллюстрированном на фиг. 7, исходным сигналом, поступающим в момент t1 на выход 31, является не сигнал СИНХР., а другой сигнал, соответствующий высокому уровню сигнала.
В момент времени t2 PLL-контур 20 был активирован, причем данный контур сконфигурирован так, что выход 31 используется для выдачи сигнала СИНХР. Поскольку PLL-контур не приведен в синхронизированное состояние, сигнал СИНХР показан, как имеющий низкий уровень.
Затем, в момент времени t3, БУИ 11 включает PLL-контур 20, изменяя PLL-сигнал ВКЛЮЧ_PLL с низкого уровня на высокий и подавая в PLL-контур 20 сигнал управления частотой, который соответствует первой частоте в развертке частот.
В момент времени t4 PLL-контур 20 синхронизируется на первой частоте, так что сигнал СИНХР. переходит с низкого уровня на высокий. Поскольку как сигнал ВКЛЮЧ_PLL, так и сигнал СИНХР. имеют теперь высокий уровень, сигнал СТАТУС в момент времени t4 также переходит на высокий уровень, как это показано на фиг. 7.
После этого на умножители 21а, 21b частоты и на усилитель 22 передатчика (см. фиг. 3) поступит энергия питания, в результате чего выходной PLL-сигнал SPLL будет иметь умноженную частоту и будет усилен, т.е. будет соответствовать передаваемому сигналу ST.
В конце сканирования по частоте радарную систему 1 измерения уровня, чтобы сэкономить энергию, можно перевести в неактивное состояние или (по меньшей мере частично) выключить. Данная операция может быть инициирована БУИ 11 (как это схематично проиллюстрировано на фиг. 7) переводом сигнала ВКЛЮЧ_PLL с высокого уровня на низкий и прекращением в момент времени t5 подачу питания на PLL-контур 20. Вследствие переходного состояния при отключении энергии контур 20 может оставаться в синхронизированном состоянии до момента времени t6.
Поскольку перевод сигнала ВКЛЮЧ_PLL с высокого уровня на низкий сопровождается переходом сигнала СТАТУС в момент времени t5 также на низкий уровень, после момента времени t5 радарной системой 1 измерения уровня сигнал не испускается. Тем самым предотвращается нежелательное излучение при отключении энергии от PLL-контура 20.
Специалисту в этой области будет понятно, что приведенными предпочтительными вариантами изобретение никоим образом не ограничено. Напротив, в границах объема прилагаемой формулы возможны многочисленные модификации и изменения.
Предложена радарная система измерения уровня, содержащая PLL-контур, генерирующий выходной сигнал и сконфигурированный с возможностью индицировать свое состояние синхронизации. Кроме того, в системе предусмотрен контур изменения сигнала, подключенный к PLL-контуру для приема выходного сигнала и изменения по меньшей мере одной характеристики данного сигнала с формированием передаваемого сигнала. Контур изменения сигнала сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура, и изменять по меньшей мере один параметр выходного сигнала в качестве реакции на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии. 2 н. и 13 з.п. ф-лы, 7 ил.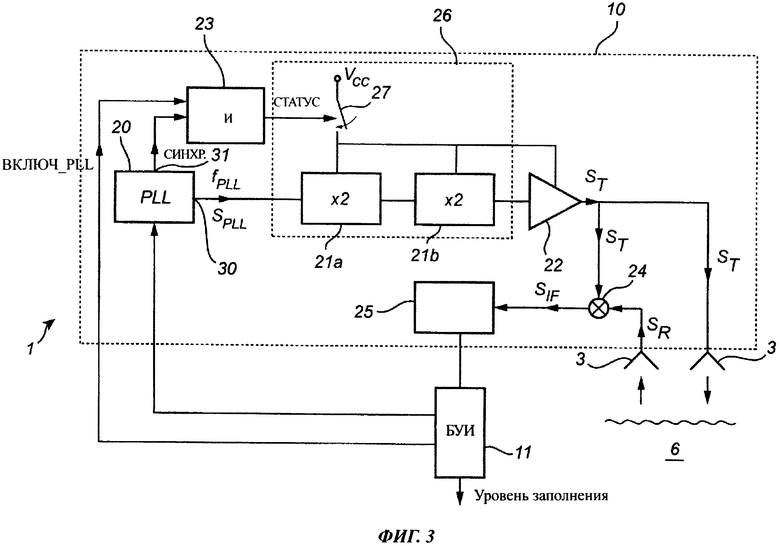
1. Радарная система (1) измерения уровня, предназначенная для определения уровня заполнения резервуара (5) продуктом (6) и содержащая:
трансивер (10), выполненный с возможностью генерировать, передавать и принимать электромагнитные сигналы,
устройство (3), распространяющее сигнал, подключенное к трансиверу и способное распространять передаваемый сигнал в направлении поверхности продукта и возвращать обратно в трансивер эхо-сигнал, являющийся отражением передаваемого сигнала от указанной поверхности, и
процессорный контур (11), связанный с трансивером и идентифицирующий уровень заполнения, определяемый по соотношению между передаваемым сигналом и эхо-сигналом, отраженным от поверхности,
при этом трансивер содержит:
PLL-контур (20) для генерирования выходного сигнала, сконфигурированный с возможностью индикации своего состояния синхронизации, и
контур (26) изменения сигнала, подключенный к PLL-контуру и предназначенный для приема выходного сигнала и изменения по меньшей мере одной характеристики указанного выходного сигнала с формированием передаваемого сигнала,
причем указанный контур изменения сигнала
выполнен с возможностью управляемого переключения в первый режим изменения сигнала, обеспечивающий первую модификацию по меньшей мере одной характеристики выходного сигнала указанным контуром изменения сигнала, и во второй режим изменения сигнала, обеспечивающий вторую, отличную от первой, модификацию по меньшей мере одной характеристики выходного сигнала указанным контуром изменения сигнала, и
сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал (СТАТУС), отображающий состояние синхронизации PLL-контура, и переключаться из первого режима с измененным сигналом во второй режим с измененным сигналом в ответ на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
2. Система по п. 1, в которой в контуре (26) изменения сигнала предусмотрен контур изменения частоты, выполненный с возможностью управляемого переключения между первым режимом, в котором частота выходного сигнала контуром изменения 19 частоты не повышена, и вторым режимом, в котором частота выходного сигнала контуром изменения частоты повышена,
причем контур изменения частоты сконфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура (20), и переключаться из первого режима во второй режим в ответ на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
3. Система по п. 2, в которой контур изменения частоты содержит по меньшей мере один умножитель (21а, 21b) частоты, выполненный с возможностью умножать частоту выходного сигнала по меньшей мере на коэффициент, равный двум.
4. Система по п. 1, в которой контур изменения сигнала содержит усилительный контур (22), подключенный к PLL-контуру (20) и предназначенный для приема и усиления выходного сигнала с формированием передаваемого сигнала,
причем усилительный контур (22)
выполнен с возможностью управляемого переключения в режим низкого усиления, в котором выходной сигнал усиливается усилительным контуром с первым коэффициентом усиления, и в режим высокого усиления, в котором выходной сигнал усиливается усилительным контуром со вторым коэффициентом усиления, превышающим первый коэффициент усиления; и
конфигурирован и подключен с возможностью принимать статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура (20), и выполнять переключение из режима низкого усиления в режим высокого усиления в ответ на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии.
5. Система по п. 1, в которой PLL-контур (20) имеет первый выход (30), на котором формируется выходной сигнал (SPLL), и второй выход (31), на котором формируется сигнал (СИНХР.) о состоянии синхронизации, отображающий состояние синхронизации PLL-контура,
а контур (26) изменения сигнала имеет первый вход, подключенный к первому выходу PLL-контура для приема выходного сигнала, и второй вход, подключенный ко второму выходу PLL-контура для приема сигнала о состоянии синхронизации.
6. Система по п. 5, в которой статусный PLL-сигнал (СТАТУС) основан на сигнале (СИНХР.) о состоянии синхронизации, поступающем из PLL-контура, и на сигнале (ВКЛЮЧ_PLL), поступающем из процессорного контура (11).
7. Система по п. 1, в которой PLL-контур имеет первый выход (30), на котором формируется выходной сигнал, и второй выход (31), на котором формируется статусный сигнал о состоянии синхронизации, отображающий состояние синхронизации PLL-контура, причем
контур (26) изменения сигнала подключен к первому выходу PLL-контура для приема выходного сигнала, а процессорный контур (11) подключен ко второму выходу PLL-контура для приема сигнала о состоянии синхронизации, и
процессорный контур сконфигурирован с возможностью генерировать статусный PLL-сигнал на основе сигнала о состоянии синхронизации и подключен к контуру изменения сигнала для передачи статусного PLL-сигнала в контур изменения сигнала.
8. Система по любому из пп. 1-7, содержащая контур управления частотой, подключенный к PLL-контуру (20) для управления указанным контуром с целью генерирования выходного сигнала в виде последовательности различных частот.
9. Система по п. 8, в которой контур управления частотой сконфигурирован с возможностью управлять PLL-контуром (20), обеспечивая генерацию выходного сигнала в виде развертки частот с монотонно изменяющейся частотой.
10. Система по п. 9, в которой развертка по частоте содержит множество частотных шагов.
11. Способ определения уровня заполнения резервуара (5) продуктом (6), использующий радарную систему (1) измерения уровня, содержащую:
PLL-контур (20), способный генерировать выходной сигнал, и
контур (26) изменения сигнала, подключенный к PLL-контуру и предназначенный для приема выходного сигнала и изменения по меньшей мере одной характеристики указанного выходного сигнала с формированием передаваемого сигнала,
при этом способ включает следующие этапы:
подают в контур изменения сигнала статусный PLL-сигнал, отображающий состояние синхронизации PLL-контура,
в качестве реакции на статусный PLL-сигнал, указывающий, что PLL-контур находится в синхронизированном состоянии, изменяют посредством контура изменения сигнала по меньшей мере один параметр выходного сигнала, формируя тем самым передаваемый сигнал,
распространяют передаваемый сигнал в направлении поверхности продукта,
принимают эхо-сигнал, являющийся отражением передаваемого сигнала от указанной поверхности, и,
исходя из соотношения между передаваемым сигналом и эхо-сигналом, отраженным от поверхности, определяют уровень заполнения.
12. Способ по п. 11, в котором этап изменения сигнала включает повышение частоты выходного сигнала.
13. Способ по п. 11, в котором этап изменения сигнала включает усиление выходного сигнала.
14. Способ по п. 11, дополнительно включающий следующие этапы:
прием сигнала активирования и
выдачу в качестве реакции на сигнал активирования сигнала управления частотой для PLL-контура.
15. Способ по любому из пп. 11-14, в котором уровень заполнения определяют на основе разности фаз передаваемого сигнала и эхо-сигнала, отраженного от поверхности.
| ПРОТИВОТОЧНЫЙ ДИАМЕТРАЛЬНЫЙ ВЕНТИЛЯТОР | 1999 |
|
RU2166671C1 |
| US 2010066589 A1, 18.03.2010 | |||
| US 2011163910 A1, 07.07.2011 | |||
| WO 2004005960 A1, 15.01.2004 | |||
| ПЕРЕДАТЧИК УРОВНЯ | 1996 |
|
RU2166737C2 |

