Область техники
Изобретение относится к радарному уровнемеру типа FMCW (Frequency Modulated Continuous Wave, непрерывное излучение с частотной модуляцией), предназначенному для определения расстояния до поверхности продукта, находящегося в резервуаре.
Уровень техники
Радарное измерение уровня содержащихся в резервуарах продуктов, в частности жидких, газообразных или гранулированных, нашло свое применение в течение последних десятилетий и в настоящее время используется в виде нескольких различающихся между собой технических решений. Для генерации и обработки соответствующего сигнала экстенсивно применялся так называемый метод FMCW, причем преимущественно в тех случаях, когда важным специфическим критерием является точность измерения. В большинстве систем FMCW передаваемый сигнал, имеющий, по существу, постоянную амплитуду и линейно сканируемую частоту, испускается в резервуар и отражается поверхностью продукта. Отраженный сигнал принимают и смешивают с испущенным сигналом, формируя сигнал с промежуточной частотой (intermediate frequency, IF), которая соответствует расстоянию от передатчика/приемника до точки отражения (обычно расположенной в резервуаре на поверхности продукта). Предусмотрена возможность вместо линейного сканирования применять также и другие типы модуляции частоты.
Системы FMCW, предназначенные для измерения уровня, в типичном варианте используют частоты порядка 6, 10 или 25 ГГц и ширину полосы, равную 1 ГГц или (главным образом для системы, работающей на частоте 25 ГГц) 2-3 ГГц. Известны также системы, применяющие частоту примерно 78 ГГц. Внутренняя часть трассы, проходящая от электроники до антенны, должна быть чистой и обладать свойствами, обеспечивающими низкие отражения. Некоторые затруднения могут возникнуть, в первую очередь, в связи с герметизацией резервуара, поскольку его герметизирующее уплотнение должно, в числе других свойств, выдерживать большие давления, воздействие различных химических веществ и другие подобные эффекты.
Качество измерений можно характеризовать различными способами, но, как правило, учитываются по меньшей мере четыре следующих фактора.
Точность характеризует, насколько точным и надежным может быть измерение. Очень высокую точность и долгосрочную стабильность можно обеспечить, генерируя частоту посредством синтезатора частот. Подтверждение точности часто включают в процедуру "подтверждения передачи продукта потребителю", причем в ряде стран такое подтверждение может быть обязательным юридическим требованием для конкретных вариантов использования. Обычно в таких случаях оговаривается точность примерно 1 мм. Следует отметить, что для нефти, находящейся в большом резервуаре, разница уровней такого порядка (1 мм) может оцениваться сотнями долларов США.
Разрешающая способность по расстоянию, т.е. способность различать в резервуаре два близких по времени радарных эхо-сигнала. Для большинства радарных уровнемеров этот параметр соответствует разнице уровней, составляющей 150-200 мм или немного больше.
Скорость обновления, характеризуемая временем до следующего измерения. В накопительных резервуарах измерение уровня - это обычно не очень критичная операция (уровень может меняться со скоростью лишь несколько сантиметров в минуту или менее). Поэтому обычным приемлемым минимумом является одно измерение в секунду. Однако в некоторых приложениях может потребоваться более быстрый отклик измерительной системы.
Чувствительность, оценивающая, насколько слабые эхо-сигналы еще можно детектировать и обрабатывать в ходе предназначенной для этого операции. Обычный вариант оценки чувствительности сводится к определению максимальных потерь на обоих участках траектории, причем в системе FMCW, чтобы провести измерение, этот параметр в типичном случае не должен превышать 90-100 дБ. В различных вариантах эти потери могут существенно различаться между собой.
В принципе, возможности разрешающей способности по расстоянию ограничены, в первую очередь, частотным диапазоном радара, однако, для системы FMCW ограничение накладывается также на обработку сигнала, причем необходим определенный компромисс между точностью и с другими свойствами, такими как скорость обновления. Для системы FMCW нужны некоторые операции по фильтрации (задание полосы пропускания), обычно выполняемые в цифровом виде. Предусмотрена возможность оптимизировать тип и ширину полосы пропускания фильтра для различных задач так, чтобы корреляция между шириной полосы в радиочастотном диапазоне и разрешением, выраженная слабее, чем в импульсной системе, тем не менее сохранялась. Обычно ширина полосы должна составлять по меньшей мере 1 ГГц.
Тот факт, что, как правило, разрешающая способность по расстоянию, если ее выразить в виде протяженного отрезка, на два порядка величины (т.е. в соотношении 100 мм : 1 мм) больше требуемой точности, означает, что радарная система, причем в особенности система FMCW, чувствительна по отношению к наружным и внутренним отражениям сигнала радара. Если, в частности, на траектории сигнала происходят два отражения (например, у окна антенны и у неудовлетворительно согласованного соединительного узла антенны), будет существовать и более слабый сигнал, который два раза прошел расстояние между этими двумя точками. Если же, например, оба отражения имеют рассогласованные между собой коэффициенты стоячей волны по напряжению (voltage standing wave ratio, VSWR), это может в наихудшем для внутреннего расстояния случае привести к отклонению, равному ±10 мм (т.е. в пределах разрешающей способности по расстоянию). Если отражения внутренние и очень стабильные, эта проблема может и не возникнуть (поскольку может быть обеспечена тщательная калибровка). Однако для более интенсивных отражений и для отражения, происходящего в изменяющемся наружном окружении резервуара, требуемая миллиметровая точность очевидным образом оказывается под угрозой, если нежелательное отклонение, изначально составляющее 10 мм, может время от времени изменяться.
Для обеспечения технического решения, осуществимого на практике, в большинстве систем FMCW предусмотрено умеренное согласование всех микроволновых (СВЧ) компонентов (т.е уменьшение отношения коэффициентов VSWR до уровня <1,2-1,5). Однако известно, что для очень точных систем FMCW точки сильного рассогласования могут являться источниками проблемы. Подобное влияние могут оказывать отражения от встречающихся в резервуаре препятствий, но эти отражения устраняют, используя антенны с узким пучком, причем в системах на основе FMCW обычно применяются антенны, создающие игольчатый паттерн направленности излучения, ориентированный перпендикулярно вниз в направлении поверхности продукта.
Для дальнейшего повышения точности в системах на основе FMCW иногда применяют волноводную конструкцию в виде трубки диаметром 50-100 мм, выполненной из нержавеющей стали и проходящей от рупора антенны через весь резервуар. Для систем, работающих на частоте 10 ГГц, наиболее типичны трубки диаметром около 5 мм или 10 мм. Эти так называемые "успокоительные трубки" позволяют очень эффективно избежать появления в резервуаре возможных мешающих эхо-сигналов. Конечно, из-за наличия успокоительной трубки стоимость системы повышается. Однако такая трубка обеспечивает возможность выполнять неискаженные измерения, когда вокруг трубки расположено много мешающих объектов, а также в тех встречающихся время от времени ситуациях, когда поверхность продукта имеет турбулентный характер и, соответственно, очень слабо отражает излучение. Для обеспечения требуемой точности должно быть обеспечено очень хорошее электрическое согласование трубки, устройства для подвода к ней сигнала и, как вариант, клапана, отсоединяющего части системы, расположенные над верхней стенкой резервуара (чтобы иметь возможность их замены).
Раскрытие изобретения
Задача, на решение которой направлено изобретение, состоит в разработке более экономически эффективного способа устранения возмущений в радарном уровнемере FMCW-типа, используемом в резервуаре.
Согласно первому аспекту изобретения для решения этих и других задач предлагается радарный уровнемер FMCW-типа, предназначенный для определения расстояния до поверхности находящегося в резервуаре продукта и содержащий контур трансивера, выполненный с возможностью посылать передаваемый электромагнитный сигнал и принимать возвращенный электромагнитный сигнал после его отражения от поверхности продукта. В данном контуре находится модулятор частоты, выполненный с возможностью модулировать частоту передаваемого сигнала, изменяя ее внутри частотного диапазона, ограниченного верхней и нижней частотами. При этом верхняя граничная частота составляет менее 4 ГГц, нижняя граничная частота по меньшей мере на 1 ГГц меньше верхней граничной частоты, а отношение верхней частоты к нижней (отношение граничных частот) выдерживается на уровне менее 2,5. Уровнемер согласно изобретению дополнительно содержит смеситель, выполненный с возможностью смешивать передаваемый и возвращенный сигналы, формируя при этом сигнал с промежуточной частотой, и процессорный контур, выполненный с возможностью определять требуемое расстояние, используя для этого сигнал с промежуточной частотой.
Радарный уровнемер снабжен также электрическим проходным вводом, проходящим от контура трансивера в резервуар, а также однопроводным зондом, механически подвешенным в верхней части резервуара и входящим в продукт, находящийся в резервуаре. Данный зонд электрически подключен к трансиверу и выполнен с возможностью направлять передаваемый электромагнитный сигнал в направлении поверхности продукта, а возвращаемый электромагнитный сигнал - в контур трансивера. Электрический проходной ввод имеет, со стороны однопроводного зонда, первый входной импеданс, а сам зонд имеет, со стороны данного ввода, второй входной импеданс, причем второй входной импеданс больше первого. Кроме того, измерительное устройство содержит согласующий компонент, установленный между первым и вторым входными импедансами и обеспечивающий электрически согласованное соединение электрического проходного ввода и однопроводного зонда, причем логарифмический коэффициент отражения данного согласованного соединения составляет менее - 10 дБ.
Согласно второму аспекту изобретения для решения этих и других задач предлагается способ радарного измерения уровня, позволяющий определить расстояние до поверхности продукта, находящегося в резервуаре. Данный способ включает следующие операции:
- генерируют передаваемый электромагнитный сигнал с шириной полосы по меньшей мере 1 ГГц, с отношением граничных частот менее 2,5 и с верхней граничной частотой менее 4 ГГц,
- через электрический проходной ввод подают передаваемый электромагнитный сигнал в резервуар и, далее, в однопроводной зонд, входящий в продукт, находящийся в резервуаре,
- обеспечивают электрически согласованное соединение между электрическим проходным вводом и данным зондом, имеющее логарифмический коэффициент отражения менее - 10 дБ,
- направляют передаваемый электромагнитный сигнал вдоль данного зонда,
- формируют возвращаемый электромагнитный сигнал, соответствующий отражению передаваемого электромагнитного сигнала от поверхности продукта,
- направляют возвращаемый электромагнитный сигнал обратно вдоль зонда и через электрический проходной ввод,
- принимают возвращенный электромагнитный сигнал,
- смешивают переданный электромагнитный сигнал и возвращенный электромагнитный сигнал, формируя сигнал с промежуточной частотой, и
- на основе сигнала с промежуточной частотой определяют искомое расстояние.
Согласно изобретению относительно дорогую успокоительную трубку заменяют
относительно дешевым отдельным проводником, который в данном контексте именуется зондом. Этот проводник выполняет функцию волновода поверхностной волны. По сравнению с успокоительной трубкой такой (т.е. однопроводной) зонд имеет совершенно другие волноводные свойства и ранее применялся только для измерения уровня с использованием рефлектометрии во временном домене (time domain reflectometry, TDR, измерение коэффициента отражения совмещением прямого и отраженного сигналов). Согласно этой функции вдоль зонда передаются импульсы (постоянного тока) в базовой полосе. Предлагалась комбинация системы FMCW-типа и зонда, но оказалось, что она функционирует неудовлетворительно, и был сделан общий вывод, что этот тип волновода поверхностной волны для радарного измерения уровня методом FMCW непригоден.
Однако согласно изобретению возможна успешная комбинация измерительного устройства FMCW-типа и волновода поверхностной волны при условии тщательного выбора рабочих параметров для радарного уровнемера в сочетании с наличием адекватного согласующего компонента между электрическим проходным вводом в резервуар и однопроводным зондом.
В данном контексте под "согласованным электрическим соединением" подразумевается электрическое соединение, у которого согласование импедансов улучшено по сравнению с прямым переходом от первого входного импеданса ко второму входному импедансу. Как более подробно будет показано далее, такой прямой переход приведет к возникновению мешающих отражений. Известно, что такое сильное отражение на траектории прохождения сигнала в системе FMCW является потенциальным источником негативных проблем. В системе TDR оно тоже создает возмущение, но, в общем случае, система FMCW к таким помехам более чувствительна. Согласующий компонент, уменьшая такие отражения, обеспечивает проведение удовлетворительного детектирования.
Должно быть понятно, что выражение "FMCW-типа" относится к любой системе, в которой передаваемый сигнал, имеющий модулированную частоту, смешивается с отраженным возвращенным сигналом, образуя при этом сигнал с промежуточной частотой, используемый далее для определения расстояния до поверхности содержащегося в резервуаре продукта. В обычной системе FMCW (т.е. в системе, использующей непрерывное излучение с частотной модуляцией) передаваемый сигнал имеет постоянную амплитуду и переменную частоту, в большинстве случаев изменяющуюся линейно (частотное сканирование). В более современных системах частотное сканирование выполняется использованием серии дискретных частот и иногда именуется, как "шаговое FMCW". Предлагались также и другие варианты, использующие передаваемый сигнал в виде серии отдельных импульсов с постоянной частотой, каждый из которых имеет свою частоту, отличающуюся от других (см., например, опубликованную заявку США 12/981995).
Свойство, общее для систем FMCW, состоит в том, что они позволяют очень точно контролировать частоту. Это является существенным преимуществом, если нужно обеспечить удовлетворительное согласование импедансов в пределах ограниченной ширины полосы. В импульсной системе TDR передаваемый сигнал также будет находиться в границах конкретного диапазона частот; однако, в отличие от системы FMCW, частота в заданном интервале изменяться не будет. Вместо этого передаваемый сигнал будет содержать спектр частот, зависящий от точной формы импульса, но она время от времени будет изменяться, и ее границы будут размытыми.
Относительно низкая верхняя граничная частота уменьшает потери, связанные с сопротивлением (измеряемые в дБ/метр и увеличивающиеся вдоль зонда примерно пропорционально частоте в степени 2/3). По сравнению с известными системами FMCW потребляемая мощность и стоимость компонентов также по всей вероятности будут меньше. Ширина полосы, составляющая по меньшей мере 1 ГГц, гарантирует удовлетворительную разрешающую способность по расстоянию.
Если, согласно изобретению, скомбинировать любую систему, выполненную на основе FMCW, и однопроводной зонд, критичным аспектом становится согласование зонда и электрического проходного ввода.
Обычно электрический проходной ввод имеет относительно низкий импеданс (например, у коаксильного ввода, если использованы коммерческие компоненты, он равен 40-75 Ом). С другой стороны в свободном пространстве резервуара импеданс зонда (определяемый путем деления передаваемой мощности на возведенное в квадрат значение тока, проходящего по проводу), как правило, превышает 250 Ом или даже 350 Ом. Например, для релевантных рабочих частот зонд диаметром 4-10 мм, выполненный на основе провода из нержавеющей стали без покрытия, имеет в свободном пространстве импеданс в интервале 300-400 Ом.
Вследствие такого рассогласования импедансов обычные системы, использующие волноводный радар (GWR) и выполненные на основе TDR, в типичном варианте в точке ввода имеют VSWR порядка 1:7 (50 Ом : 350 Ом), инициируя тем самым потери на обоих участках траектории, вызванные отражением с коэффициентом 7 дБ. Для скачка импеданса логарифмический коэффициент отражения (далее коэффициент отражения) на участке между электрическим проходным вводом и зондом часто равен примерно -2,5 дБ, в результате чего (с учетом данных потерь из-за отражения на траектории) превышение отражения от границы этого скачка импеданса по отношению к нормальному эхо-сигналу, отраженному от поверхности нефти, составляет примерно 20 дБ, а в случае сжиженного газа даже превышает это значение.
В импульсной системе TDR это рассогласование обычно используют, чтобы сформировать калибровочный импульс. При попытке выполнить согласование возникала проблема из-за того, что для импульсных систем TDR требуется относительно большое отношение граничных частот (в типичном варианте порядка 10:1). Для таких частот можно применить шаговое согласование импедансов вдоль линии, не ослабляя, однако, механическую прочность провода. При отношении импедансов 1:7 (50 Ом : 350 Ом) и отношении граничных частот, равном 5-10 (для частотного интервала 0,1-1 ГГц или немного меньшего, например, 0,2-1 ГГц), длина преобразователя (согласующего компонента) превысит 1 м. Поэтому его необходимо сконструировать так, чтобы он функционировал, частично находясь ниже поверхности жидкости. На решение этой специфической проблемы согласования были направлены многочисленные технические решения (см., например, US 7636059).
Если, согласно изобретению, систему FMCW использовать в комбинации с однопроводным зондом, наличие такого калибровочного импульса становится необязательным; более того, использование такого импульса создало бы негативный эффект в ближней зоне детектирования (т.е. вблизи верхней стенки резервуара). Однако, как установил автор изобретения, по сравнению с импульсной системой TDR система FMCW позволяет использовать гораздо меньшее отношение граничных частот. Вопреки ожиданиям оказалось, что данное отношение, составляющее менее 2,5, обеспечивает смягчение проблемы согласования, уменьшая при том же скачке импеданса длину согласующего компонента примерно в десять раз. Для системы, использующей импульсы в базовой полосе, такое малое отношение граничных частот получить невозможно.
Согласно изобретению согласующий компонент обеспечивает коэффициент отражения менее -10 дБ. Другими словами, соотношение мощностей отраженного и излученного сигналов соответствует -10 дБ, т.е. данное отражение составляет менее 20% от энергии, отражаемой проходным вводом зонда в обычной системе GWR, использующей импульсы в базовой полосе. Очевидно, что таким образом облегчается возможность точно измерять уровни, расположенные у самой верхней части резервуара.
В некоторых вариантах согласующим компонентом обеспечивается коэффициент отражения менее -15 дБ или даже менее -20 дБ. Посредством такого согласования можно гарантировать, что отражение от электрически согласованного соединения окажется слабее отражения от поверхности содержащейся в резервуаре жидкости.
Преимущество заключается в том, что согласующий компонент не выступает в обычную рабочую зону резервуара, т.е. в зону, в которой, как можно ожидать, располагается поверхность продукта при соблюдении нормальных рабочих условий (или при ожидаемых возможных отклонениях от этих условий). Другими словами, в своем стандартном положении согласующий компонент не входит в содержащийся в резервуаре продукт. Это означает, что в рабочем режиме продукт не будет негативно воздействовать на согласование, обеспечиваемое данным компонентом. Еще более желательно, чтобы длина участка, на котором выполняется согласование, была ограничена, т.к. это позволяет установить согласующий компонент в так называемом стакане, выполненном в верхней стенке резервуара. Если герметизирующий уплотнитель не поврежден, поверхностный слой продукта будет попадать в стакан только в самой малой степени. Реальная длина согласующего компонента может составлять, например, менее 20 см.
В большинстве приложений зонд механически подвешен на электрическом проходном вводе. Типичное значение возможной механической нагрузки составляет 30-40 кН, поэтому, чтобы выдерживать такое усилие, центральный проводник необходимо выполнить из высококачественной стали и достаточно толстым (диаметром порядка 5 мм). Из-за этих механических воздействий импеданс электрического проходного ввода даже уменьшится (в типичной ситуации - до уровня 40 Ом или менее).
Краткое описание чертежей
Далее изобретение будет описано более подробно, со ссылками на прилагаемые чертежи, на которых проиллюстрированы варианты изобретения, представляющиеся предпочтительными на момент составления данного описания.
На фиг. 1 схематично представлена измерительная система, выполненная согласно варианту изобретения.
На фиг. 2 радарный уровнемер по фиг. 1 проиллюстрирован более детально.
На фиг. 3 приведен пример конструкции проходного ввода в резервуар.
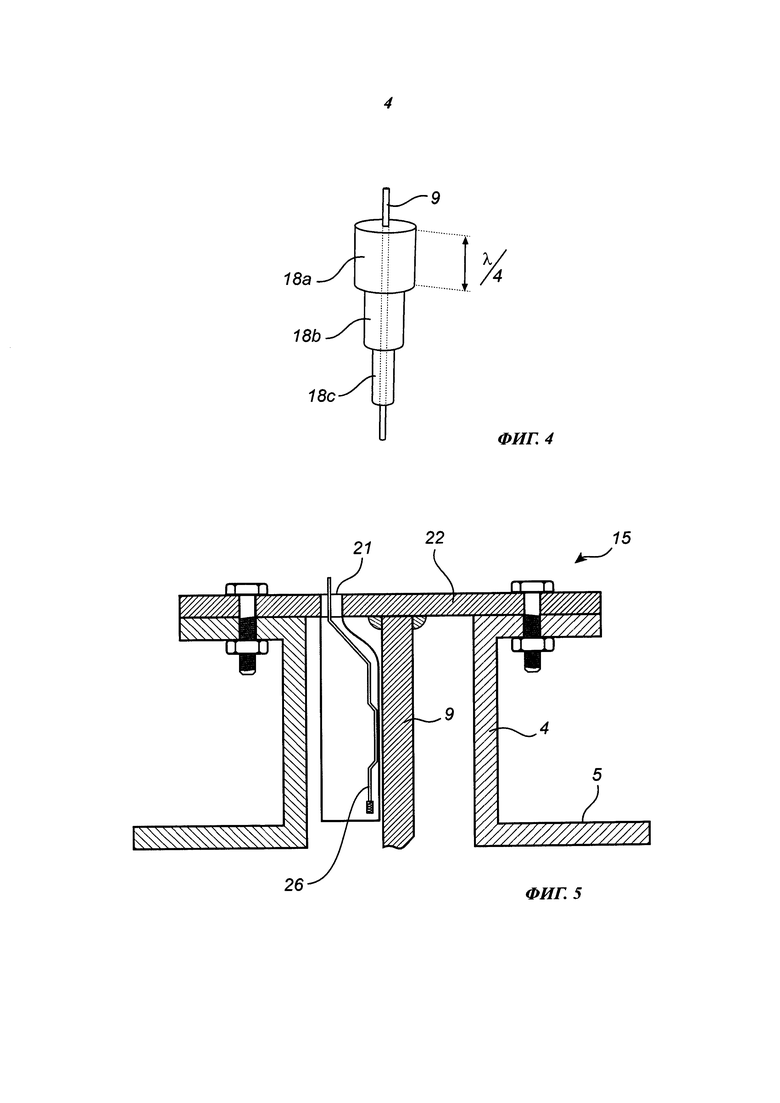
На фиг. 4 приведен пример согласующего компонента.
На фиг. 5 приведен второй пример конструкции проходного ввода в резервуар.
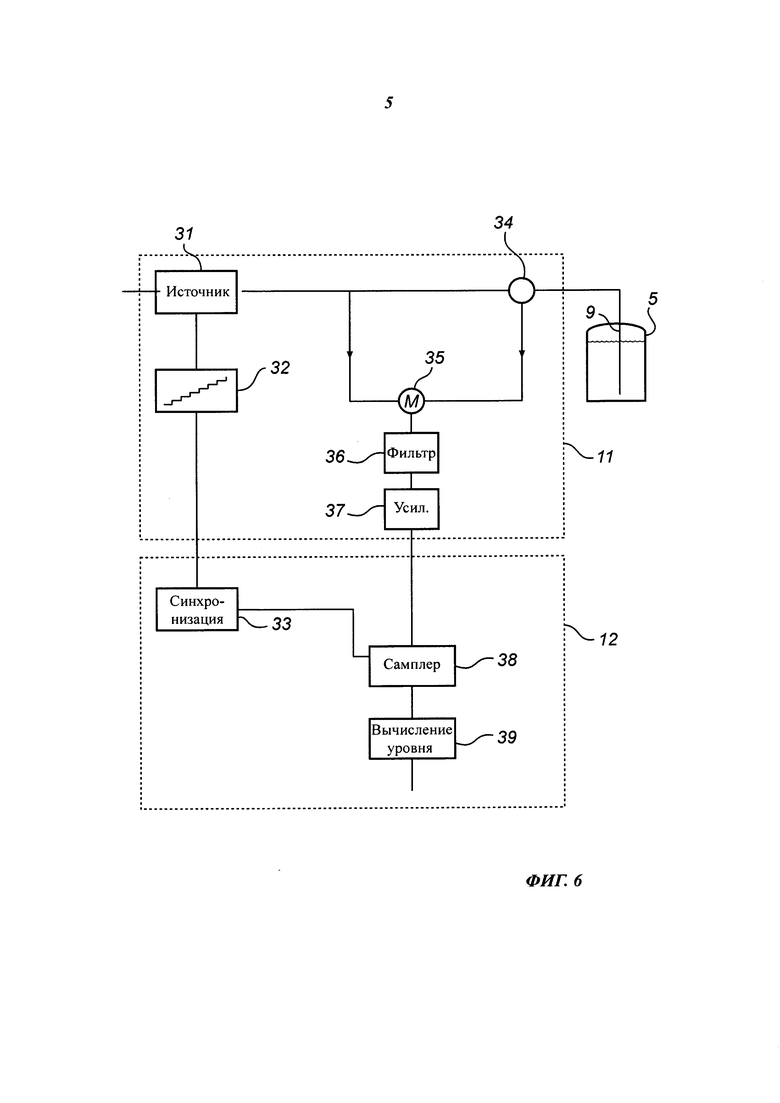
На фиг. 6 представлена блок-схема трансивера и процессорного контура, проиллюстрированных на фиг. 2.
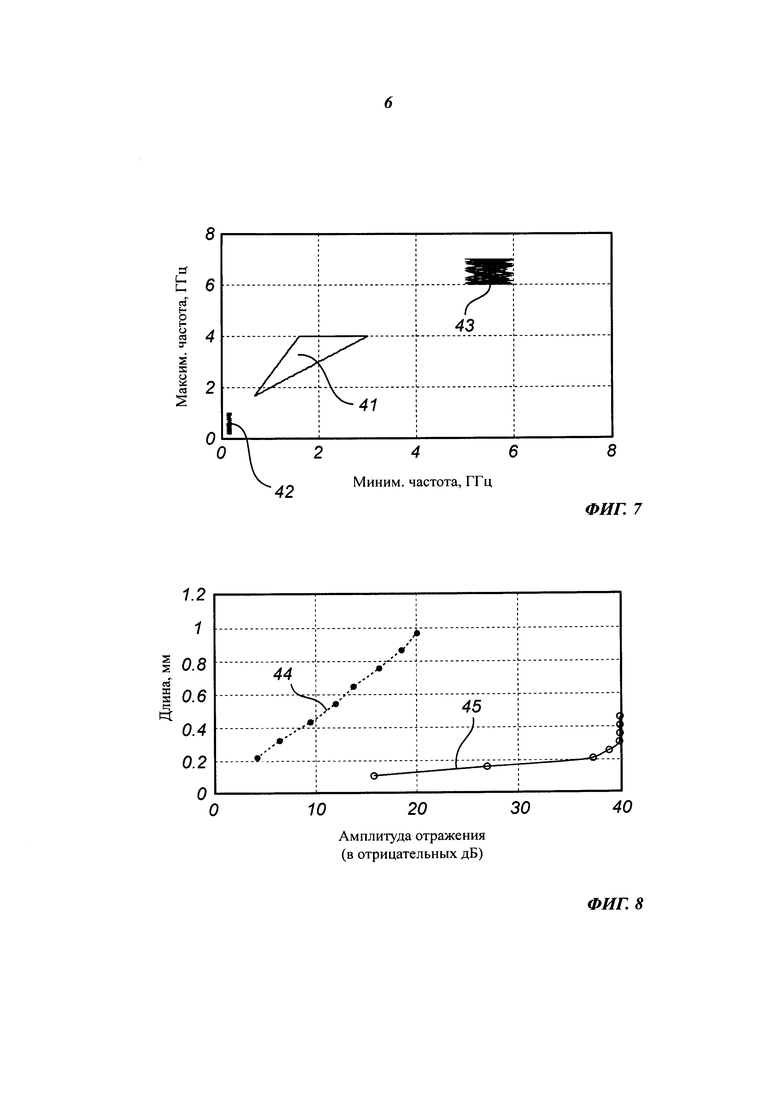
На фиг. 7 представлена диаграмма для частот, пригодных для использования при осуществлении изобретения.
На фиг. 8 приведена диаграмма длины ступенчатого преобразователя импедансов, представленная в виде функции максимального рассогласования.
Осуществление изобретения
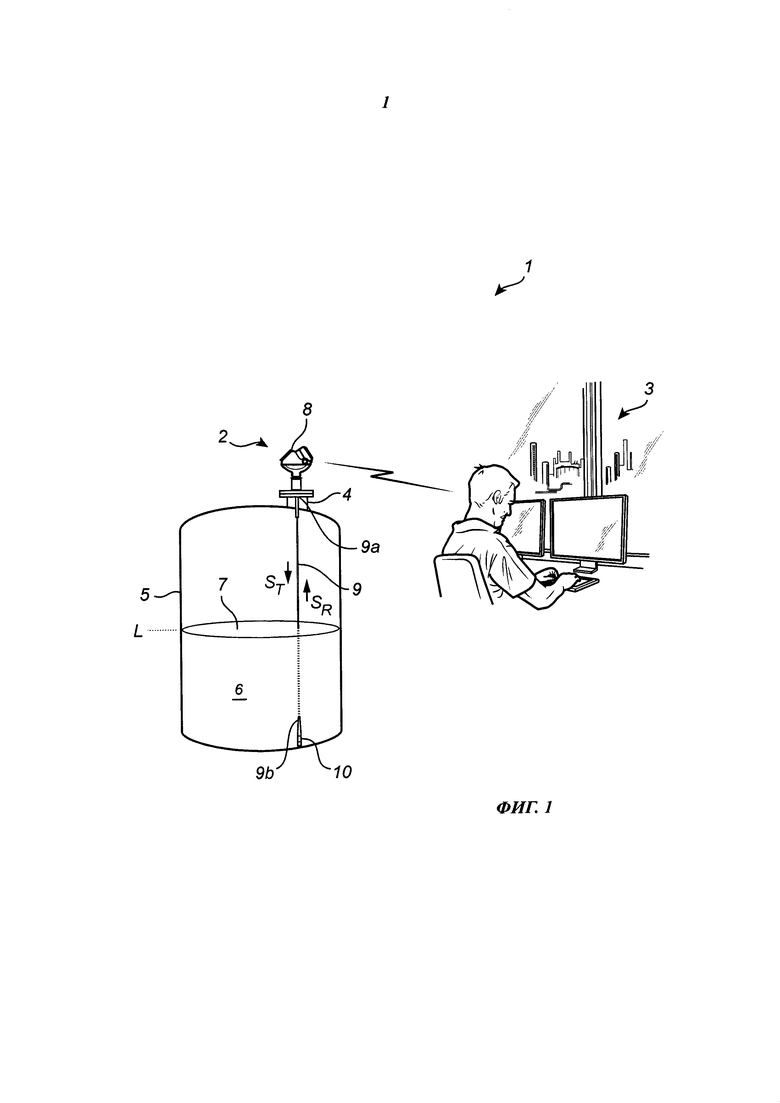
На фиг. 1 схематично представлены система 1, измеряющая уровень заполнения и содержащая радарный уровнемер 2 и центр 3 управления (проиллюстрированный, как пост управления).
В данном случае уровнемер 2 установлен на трубчатой монтажной конструкции 4 (так называемом стакане), которая (который) выступает от верхней стенки резервуара 5, по существу, вертикально вверх. Резервуаром 5 может быть любой контейнер или любая емкость, способный (способная) содержать подлежащий измерению продукт. Обычно стакан 4 выполнен как постоянная часть резервуара, изначально не предназначенная для сопряжения с уровнемером конкретного типа, и поэтому он может иметь свойства, неидеальные для такого варианта применения. Конечно, кроме того, предусмотрена возможность установить радарный уровнемер на резервуар вообще без всякого стакана.
Радарный уровнемер 2 устанавливается с целью измерений уровня заполнения резервуара 5 продуктом 6, выполняемых посредством детектирования расстояния до верхней поверхности 7 данного продукта. Предусмотрена возможность детектировать также расстояние до границы раздела сред, расположенной ниже, такой как граница раздела между нефтепродуктом и находящейся под ним водой. Уровнемер 2 содержит измерительный блок 8, а также распространяющее устройство в виде волновода 9 поверхностной волны, проходящего от измерительного блока 8 через стакан 4 в направлении продукта 6 и, далее, в объем продукта. В варианте, приведенном в качестве примера на фиг. 1, волновод поверхностной волны представляет собой гибкий однопроводной зонд 9, имеющий первый конец 9а, который подключен к измерительному блоку 8, и второй конец 9b, подсоединенный к грузу 10, что позволяет удерживать зонд в вертикальном и натянутом состоянии. В порядке альтернативы, зонд может быть прикреплен к дну резервуара.
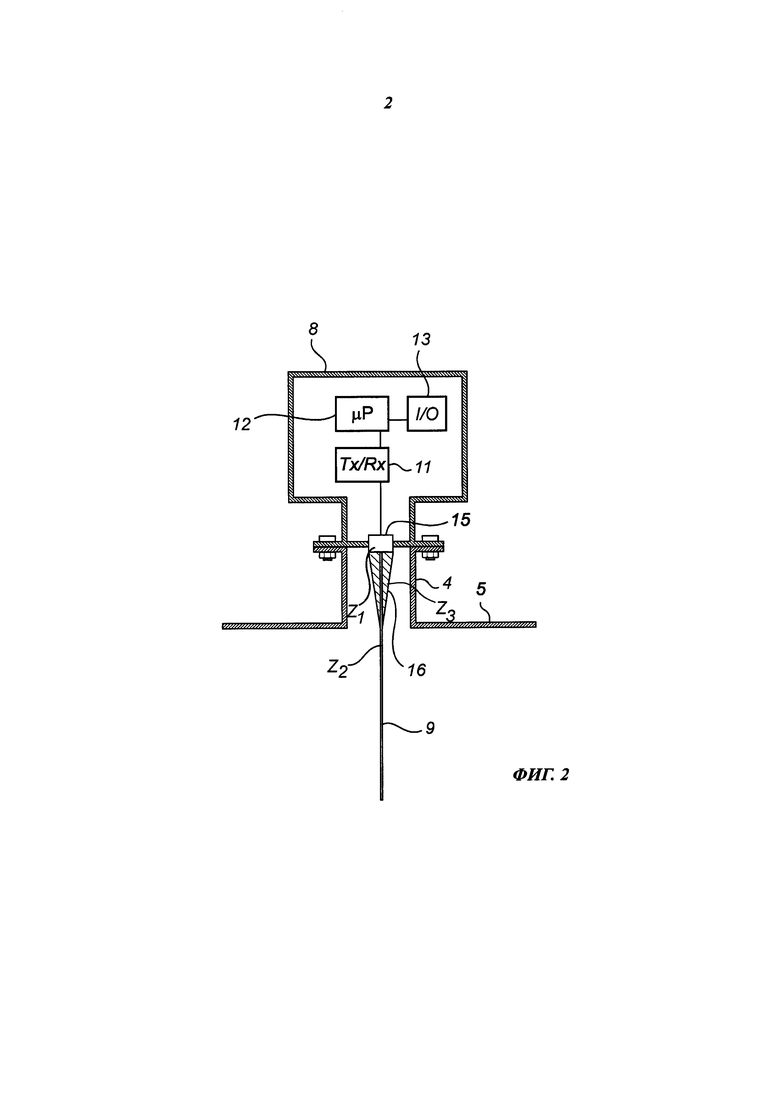
Как показано на фиг. 2, в электронном блоке 8 содержится трансивер 11 (Tx/Rx), электрически подключенный к зонду 9, и процессорный контур 12 (μР), электрически подключенный к трансиверу 11. Трансивером может служить функциональный блок, способный передавать и принимать электромагнитные сигналы, или система, в которой передатчик и приемник являются раздельными блоками. В типичном варианте компоненты трансивера 11 выполнены в виде аппаратных средств и образуют часть устройства, обычно именуемого СВЧ-блоком, а в процессорном контуре может быть скомбинирована аналоговая обработка сигнала, выполняемая аппаратными средствами, и цифровая обработка сигнала, реализуемая модулями программного обеспечения, которыми управляет встроенный процессор. Каким-то конкретным вариантом реализации изобретение не ограничено, и может быть рассмотрено любое техническое решение, оказавшееся пригодным для выполнения вышеописанных функций.
Трансивер 11 выполнен с возможностью генерировать и посылать передаваемый электромагнитный сигнал ST, направляемый зондом 9 в направлении поверхности 7 продукта 6. Возвращаемый электромагнитный сигнал SR, который формируется в результате отражения от поверхности 7, возвращается вдоль зонда 9 обратно и принимается трансивером 11.
Процессорный контур 12 выполнен с возможностью определять расстояние между референтным положением (таким как верхняя стенка резервуара) и поверхностью 7 продукта, анализируя передаваемый сигнал ST и возвращенный сигнал SR, в результате чего появляется возможность вычислить уровень L заполнения. В данном случае резервуар 5 содержит монопродукт 6, но следует отметить, что подобным образом можно измерять расстояние по оси зонда 9 до границы любого материала.
Кроме того, в измерительном блоке 8 имеется коммуникационный интерфейс 13 (I/O), подключенный к процессорному контуру 12 и обеспечивающий возможность коммуникации с центром 3 управления. В варианте, представленном на фиг. 1 и 2, коммуникация между радарным уровнемером 2 и центром 3 управления является беспроводной. Хотя на фиг. 2 это не показано, в типичном варианте система 1 радарного уровнемера выполнена с возможностью обычного подключения к внешнему источнику энергии или может содержать внутренний источник энергии, например батарею или устройство, способное получать энергию от Солнца.
Вместо беспроводной коммуникации может быть использован, например, аналоговый и/или цифровой коммуникационный канал на основе проводной связи. В частности, коммуникационный канал может представлять собой двухпроводной контур 4-20 мА, а значение уровня заполнения можно передавать, подавая на данный контур ток, соответствующий конкретному уровню заполнения. Через этот же контур, т.е. токовый контур 4-20 мА, можно посылать и цифровые данные, используя для этого протокол цифровой передачи данных HART. Кроме того, могут быть применены чисто цифровые коммуникационные протоколы, такие как Modbus, Profibus или Foundation Fieldbus, причем в варианте с проводной коммуникацией по этим же проводам можно подавать также и питание для измерительного блока.
Как показано на фиг. 2, трансивер 11 подключен к зонду 9 через конструкцию 15 для электрического проходного ввода в резервуар, обеспечивающую герметизацию данного ввода в верхней стенке резервуара. Обычно такое герметизирующее уплотнение непроницаемо для воздуха, однако, это необязательно, и в некоторых случаях оно просто предотвращает утечку продукта. Электрический проходной ввод 21 (см. также фиг. 3) имеет первый входной импеданс Z1 (со стороны зонда 9), а сам зонд 9 имеет второй входной импеданс Z2 (со стороны данного ввода). Как уже упоминалось и как более подробно будет описано далее, из-за механических ограничений и ограничений, связанных с материалом, разница между первым и вторым входными импедансами будет достаточно большой, чтобы инициировать мешающие отражения. Поэтому между вводом 21 и зондом 9 установлен согласующий компонент 16, обеспечивающий достаточно хорошее согласование между данными импедансами и, тем самым, уменьшающий мешающие отражения. Данный согласующий компонент способен иметь по меньшей мере один промежуточный импеданс Z3, который меньше первого входного импеданса, но больше второго входного импеданса.
Необходимо надежно закрепить зонд 9 в верхней зоне резервуара. В типичном варианте его подвешивают в резервуаре на верхней стенке или на конструкции 15 проходного ввода. Зонд должен выдерживать достаточно большие приложенные усилия, которые согласно типичным предъявляемым требованиям могут составлять 30 кН или даже 40 кН. Очевидно, что эти большие механические усилия ограничивают набор возможных вариантов выполнения согласующего компонента 16.
Однопроводной зонд 9 может быть сформирован одним цельным проводником (так называемой линией Губо) с нанесенным диэлектрическим покрытием, хотя наличие покрытия не является обязательным. Однако во многих приложениях зонд представляет собой трос из нержавеющей стали, сплетенный из множества проволок.
Выбором зонда предопределяется выбор рабочих частот. Для троса из нержавеющей стали, имеющего диаметр 4 мм, в приведенной далее таблице представлены некоторые расчетные данные (для частоты 1 ГГц расчеты основаны на удельном сопротивлении 0,14 Ом/кв; это значение на 15% превышает наихудшие аналогичные данные для нержавеющей стали, найденные в разных источниках).
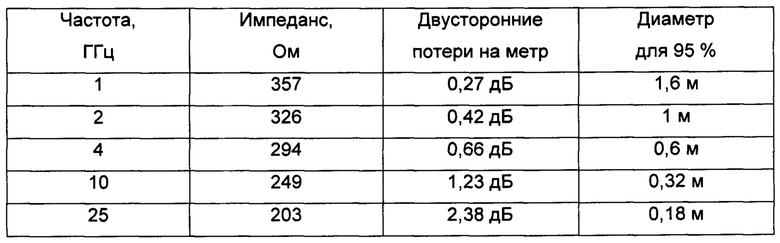
Приведенные в таблице значения импеданса рассчитывались, как переданная мощность, деленная на возведенное в квадрат значение тока, а значения "диаметра" относятся к окружающему зонд виртуальному цилиндру, через который передается 95% мощности. С учетом того, что к измерительному устройству предъявляется естественное в данном контексте требование охватывать рабочую зону, составляющую минимум 40 м, из данных таблицы следует, что при выборе частоты 4 ГГц потери на двух участках траектории составят 0,66 дБ × 40 = 26 дБ. Таким образом, по всей вероятности, частоты, превышающие 4 ГГц, использоваться не будут. Выбор 95% для энергии поля, охваченного расчетным диаметром, носит произвольный характер. Если использовать не нержавеющую сталь, а более качественный проводник, импеданс и диаметр, внутри которого сконцентрирована данная доля поля, увеличатся, причем к такому же результату приведет применение более низкой частоты.
В свободном пространстве внутри резервуара импеданс зонда, выполненного на основе провода из нержавеющей стали, в несколько раз превышает импеданс ввода 21 и может в типичном случае составлять 350 Ом. Соответственно, импеданс электрического проходного ввода 21 будет гораздо меньше. Например, заполненная пластиком коаксиальная линия с наружным диаметром (диаметр диэлектрика) 6 мм и внутренним диаметром 1-2 мм будет иметь импеданс 40-70 Ом. Если внутренний диаметр равен 0,5 мм, импеданс такой линии повышается до 100 Ом. Однако любая передающая линия, пригодная для проведения ее через прочное (надежное) уплотнение, обязательно должна иметь достаточно низкий импеданс (по всей вероятности, меньше 100 Ом).
Таким образом, подключение однопроводного зонда к проходному вводу 21 в типичном варианте создает переход между низким импедансом ввода 21 и высоким импедансом зонда 9 в свободном пространстве.
Как уже упоминалось, граница данного скачка импеданса частично отражает передаваемый электромагнитный сигнал ST, в результате чего возникает эхо-сигнал, который может быть гораздо сильнее эхо-сигнала, образующегося при отражении передаваемого электромагнитного сигнала от поверхности продукта. Таким образом, отражение, вызванное скачком импеданса, можно спутать с отражением от поверхности содержащегося в резервуаре продукта. В качестве типичного примера можно указать, что для данного эхо-сигнала коэффициент отражения составляет в интервале от -2 дБ до -3 дБ.
Если радарный уровнемер 2 установлен на стакан 4, как это показано на фиг. 2, наличие стакана вызовет два скачка импеданса и, таким образом, два мешающих эхо-сигнала. Эхо-сигнал у верхнего конца стакана будет небольшим (чем уже стакан, тем меньше эхо-сигнал), но, кроме того, появится также эхо-сигнал у нижнего конца стакана, т.е. там, где начинается "свободное пространство" резервуара, причем чем уже стакан, тем интенсивнее будет данный сигнал. С учетом различий стаканов и проводов более сильный из этих двух эхо-сигналов будет иметь значение в интервале от -4 дБ до -7 дБ.
Согласующий компонент 16, выполненный согласно изобретению, подсоединен между электрическим проходным вводом 21 и зондом 9 и предназначен для устранения или по меньшей мере уменьшения, по существу, любого скачка импеданса, чтобы ослабить любое отражение, вызванное данным скачком (данными скачками). Например, согласованное электрическое соединение может обеспечить коэффициент отражения менее -10 дБ, т.е. отраженный сигнал, отношение которого к входному сигналу соответствует -10 дБ. Предпочтительным является коэффициент отражения, составляющий менее -12 дБ, менее -15 дБ или, что еще более предпочтительно, менее -20 дБ. В общем случае желательно уменьшить скачок импеданса до такой степени, при которой отражение, вызванное данным скачком, оказывается слабее отражения, вызванного наличием продуктов, участвующих в формировании относительно слабых эхо-сигналов (к таким продуктам относятся сжиженный природный газ, сжиженный нефтяной газ, продукты на основе нефти, а также твердые продукты, такие как пластиковые гранулы или зерно). В этих вариантах можно ожидать появления эхо-сигнала от поверхности, отношение которого к входному сигналу соответствует примерно - 18 дБ.
В данном описании термин "согласующий компонент" относится к любому компоненту, установленному между электрическим проходным вводом 21 и зондом 9 в свободном пространстве внутри резервуара (или стакана). В некоторых вариантах, как это будет описано далее, компонентом 16 может быть конструкция, охватывающая зонд 9. При таком выполнении верхняя часть зонда 9 будет иметь импеданс, постепенно увеличивающийся до значения "импеданса в свободном пространстве" для однопроводного зонда, находящегося в резервуаре. Можно также представить себе согласующий компонент в виде сборки из компонентов, помещенных у верхнего конца зонда в непосредственной близости от электрического проходного ввода.
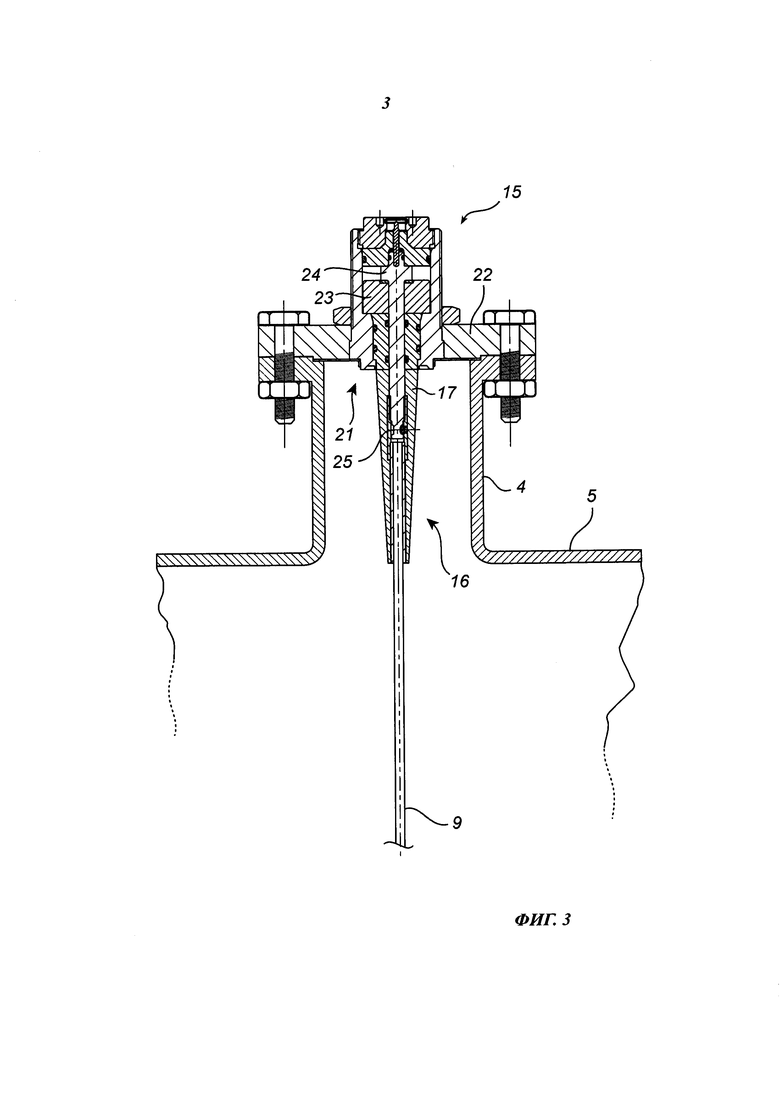
Пример конструкции 15 проходного ввода в комбинации с подвеской зонда представлен на фиг. 3. В данном случае электрический проходной ввод 21 снабжен уплотняющим элементом 23 в виде диэлектрической кольцевой втулки, охватывающей центральный проводник 24, образуя герметизированное электрическое соединение, проходящее через стенку 22 резервуара. Ввод 21 выполняет также функцию подвески для зонда 9. С этой целью в проводнике 24 ввода 21 предусмотрен терминал 25, предназначенный для подсоединения зонда и являющийся местом, к которому может быть прикреплен зонд 9.
Как уже упоминалось, усилие, прилагаемое зондом к терминалу 25 и, таким образом, к проходному вводу 21, достаточно велико. Поэтому размеры центрального проводника 24 и кольцевой втулки 23 должны обеспечивать достаточную прочность, в связи с чем, например, проводник 24 может иметь диаметр 4-8 мм. В результате ввод 21 фактически представляет собой коаксиальное соединение, характеризующееся относительно низким импедансом (в типичном случае порядка 40-50 Ом).
Из уровня техники известны различные конструкции как диэлектрических, так и металлических согласующих компонентов (см., например, документ US 7636659, включенный в данное описание посредством ссылки). В примере, представленном на фиг. 3, этот компонент снабжен полой конической диэлектрической втулкой 17, коаксиально охватывающей зонд 9.
В проиллюстрированном примере компонент, согласующий импедансы, не выступает за нижнее отверстие стакана 4. Чтобы облегчить его введение в резервуар 5, предпочтительно выбрать максимальный осевой размер данного компонента меньше осевого размера сквозного отверстия, выполненного в резервуаре 5.
На фиг. 4 проиллюстрирован согласующий компонент, которому придана ступенчатая форма. Иногда такие устройства именуют конструкцией Чебышева. В данном случае согласующий компонент состоит из трех цилиндрических секций 18а-18с, диаметр которых уменьшается в направлении свободного конца однопроводного зонда 9. Длина каждой цилиндрической секции 18а-18с в предпочтительном варианте может составлять четверть длины волны (λ/4), соответствующей центральной частоте сигнала, который посылается трансивером 11. На фиг. 2 и 3 данная часть согласующего компонента показана непрерывной и конической, однако, как известно из уровня техники, для этой части предпочтительными могут оказаться различные конфигурации со ступенчатым изменением диаметра.
Применительно к максимальному рассогласованию наиболее коротким в общем случае является ступенчатый согласующий компонент (преобразователь импеданса), но, если он частично перекрыт уровнем нефти, лучше выбрать вариант с непрерывным изменением диаметра. В любом случае желательно, чтобы коэффициент отражения от согласующего компонента был существенно меньше коэффициента отражения от поверхности нефти, составляющего примерно -15 дБ. Конкретно, он может находиться, например, в интервале от -20 дБ до -14 дБ.
Условия, требуемые для получения такого короткого согласующего компонента, будут рассмотрены далее со ссылками на фиг. 8.
Другой вариант конструкции 15 электрического проходного ввода 21 проиллюстрирован на фиг. 5. В данном случае зонд 9 механически подвешен не к этому вводу, а к верхней стенке резервуара. Устройство 26 для ввода сигналов обеспечивает возможность ввести передаваемый и возвращаемый сигналы в зонд 9 гальванически изолированным образом. Несмотря на то, что в таком варианте электрический проходной ввод 21 не подвергается воздействию больших усилий, тем не менее, в типичной ситуации он по сравнению с зондом будет иметь гораздо более низкий импеданс (в наиболее вероятном варианте гораздо меньше 100 Ом). Поэтому, чтобы уменьшить описанное выше рассогласование, необходимо снабдить устройство 26 компонентом, согласующим импедансы. В проиллюстрированном примере устройство 26 состоит из трех секций, соответствующих четверти длины волны, причем центральная секция по сравнению с другими расположена на меньшем расстоянии от зонда 9. Детальное рассмотрение устройства для ввода сигналов не входит в задачу изобретения, но примеры конструкций, пригодных в этом аспекте, приведены в документе US 2009/0085794, содержание которого включено в данное описание посредством ссылки.
На фиг. 6 приведена более подробная блок-схема трансивера и процессорного контура, проиллюстрированных на фиг. 2, в варианте, использующем систему FMCW, у которой при "сканировании" частоты используются интервалы с постоянной частотой в пределах интервала (шаговое или ступенчатое сканирование частоты). Должно быть понятно, что изобретение не ограничено такими "шаговыми" системами и может использоваться в системах, в которых передаваемые сигналы модулируются, наоборот, непрерывно. Для определения расстояния до поверхности продукта посредством синхронного смешивания сигналов функцию передаваемого сигнала могут выполнять также и многие другие альтернативные варианты сигналов с модулируемой частотой.
В данном случае в трансивере 11 имеется СВЧ-источник 31 (например, генератор с кварцевой стабилизацией частоты), приводимый в действие генератором 32 ступенчатого напряжения, которым, в свою очередь, управляет контур 33 синхронизации, являющийся частью процессорного контура 12. Источник 31 подключен к зонду 9 через делитель 34 мощности, выполненный с возможностью передавать возвращаемый от антенны сигнал в смеситель М (обозначенный, как 35), который, кроме того, способен принимать сигнал от источника 31. Выход смесителя подключен через фильтр 36 низких частот к усилителю 37.
В некоторых вариантах систем FMCW возвращенный сигнал смешивают с задержанной версией передаваемого сигнала. Такая обработка сигналов имеет определенные преимущества, но более затратна, т.к. использует дополнительные компоненты.
В данном случае в процессорный контур 12, в добавление к упомянутому выше контуру 33 синхронизации, встроен самплер (дискретизатор сигналов) 38, выполненный с возможностью принимать и отбирать сигнал. Предусмотрена возможность включить в конструкцию самплера схему выборки и хранения, функционирующую в комбинации с А/Ц-преобразователем, или выполнить его в виде сигма-дельта преобразователя. Самплером 38 управляет контур 33 синхронизации, обеспечивая синхронизацию с измерительным сигналом. Кроме того, в процессорном контуре для расчета уровня предусмотрен блок 39 вычисления уровня, подключенный к самплеру 38.
В данном случае ширина полосы передаваемого сигнала превышает 1 ГГц (чтобы обеспечить достаточное разрешение), а отношение граничных частот (отношение максимальной частоты к минимальной) составляет менее 2,5 (что позволяет выполнить эффективное согласование), а верхняя граничная частота ограничена значением менее 4 ГГц, чтобы избежать слишком сильного ослабления сигнала при прохождении вдоль однопроводного зонда. Для пригодного интервала частот возможны такие варианты как 1-2 ГГц, 2-4 ГГц или 1,2-3 ГГц.
Следует отметить, что относительная ширина полосы (например, при центральной частоте 10 ГГц и ширине полосы 2 ГГц) будет превышать аналогичный параметр для известных систем FMCW, у которых он обычно достигает только 0,15-0,20. Поэтому, известный контур, применяемый в обычных системах FMCW, придется не перенастраивать на уменьшенную частоту, а переконструировать, изменяя многие его параметры.
На фиг. 7 проиллюстрирован полученный в результате набор возможных комбинаций верхней и нижней граничных частот в области, обозначенной, как 41. Для сравнения приведена область 42, представляющая частоты (приблизительно 0,1-1 ГГц) в типичной импульсной системе TDR с базовой полосой, а также область 43, представляющая частоты, которые используются в обычной системе FMCW с центральной частотой примерно 6 ГГц и с шириной полосы 1-1,5 ГГц.
В процессе функционирования синхронизирующий контур 33 управляет СВЧ-источником 31, инициируя испускание передаваемого сигнала, имеющего в данном случае форму шагового сканирования частоты. Передаваемый сигнал, как правило, изменяется ступенчатым образом надлежащими шагами от более низкой частоты к более высокой. В альтернативном варианте он может изменяться таким же образом, но, наоборот, от более высокой частоты к более низкой, но предусматривается возможность расположить частотные шаги даже в любом порядке.
Для интересующего расстояния 30 м количество N шагов сканирования может составлять примерно 1000. Таким образом, в типичном варианте размер (Δf) каждого частотного шага будет составлять величину порядка мегагерц. Для приложения, ограниченного по расходу электроэнергии, длительность сканирования ограничивают, и в типичном случае она выбирается в интервале 0-100 мс. Например, если при количестве шагов, равном 1000 (N=1000), длительность сканирования может составлять примерно 30 мс, длительность каждого шага составит 30 мкс (другими словами, скорость обновления составляет примерно 30 кГц). Конечно, возможны также и другие варианты длительностей сканирования.
Поступающий из СВЧ-источника измерительный сигнал испускается, с возможностью распространяться вдоль зонда 9, в резервуар 5, а эхо-сигнал возвращается через делитель 34 мощности в смеситель 35, где он смешивается с переданным сигналом. Смешанный сигнал (IF сигнал) фильтруется фильтром 36 и перед поступлением в процессорный контур 12 усиливается усилителем 37. IF сигнал состоит из постоянных фрагментов и представляет собой осциллирующий сигнал, у которого частота пропорциональна расстоянию до отражающей поверхности, а длина постоянного фрагмента равна длине шага измерительного сигнала. В типичном варианте данная частота составляет порядка килогерц, например, менее 100 кГц, обычно - менее 15 кГц.
Усиленный IF сигнал принимается процессорным контуром 12, где самплером 38 производится его семплирование и А/Ц-преобразование. Желательно, чтобы у А/Ц преобразователя частота семплирования была достаточно близка к скорости обновления в измерительном сигнале. Тогда семплирование каждого шага измерительного сигнала будет происходить только один раз, не больше.
Результирующий вектор, т.е. вектор, полученный в результате семплирования, подается в блок 39 вычисления уровня, где по данному вектору определяется частота IF сигнала, на основании которой затем оценивается расстояние до отражающей поверхности (и, далее, уровень заполнения резервуара продуктом).
Чтобы проиллюстрировать существенное уменьшение требуемого пространства при использовании высокоимпедансного зонда в комбинации с системой FMCW, модифицированной согласно изобретению, на фиг. 8 приведена диаграмма, демонстрирующая длину преобразователя Чебышева как функцию интенсивности соответствующего отражения (выраженной в отрицательных дБ) в случае максимального рассогласования. Первая кривая 44 относится к типичной системе TDR с полосой пропускания 200-1200 МГц (один наносекундный импульс постоянного тока и отношение граничных частот 6:1). Каждая секция преобразователя обозначена точкой, так что согласно чертежу его длина изменяется от двух до девяти секций, каждая из которых имеет длину 107 мм (равную четверти длины волны на центральной частоте полосы 200-1200 МГц). Как наглядно следует из данной диаграммы, для корректного выполнения функции согласования, т.е. чтобы получить коэффициент отражения, который был бы меньше ожидаемого эхо-сигнала от жидкости и в возможном варианте находился в интервале от -14 дБ до -18 дБ, требуется длина преобразователя, равная примерно 1 м или более.
Вторая кривая 45 относится к системе FMCW-типа, выполненной согласно варианту изобретения, имеющей полосу частот 1-2 ГГц и преобразователи (согласующие компоненты), состоящие из 2, 3, 4 и т.д. секций, длина каждой из которых из-за более высокой частоты равна 50 мм. В системе FMCW-типа уже три секции (см. фиг. 4) обеспечат коэффициент отражения, составляющий ≈10 дБ, т.е. меньше, чем для эхо-сигнала от нефти, а соответствующая длина (в сумме 3 × 50 = 150 мм) в большинстве приложений при нормальных рабочих условиях будет отвечать положению выше поверхности жидкости. Следует также подчеркнуть, что, как правило, частоты в FMCW-передатчике при всех условиях будут удерживаться в своих границах (в данном случае 1-2 ГГц), поэтому характер пропускания фильтра вне полосы пропускания не окажет негативного влияния на функционирование. Для обеих кривых 44, 45 скачок импеданса (50-350 Ом) считается одинаковым, однако, на практике различие конечных конструкций будет весьма существенным. Длина зоны согласования импеданса в FMCW-системе позволит согласующему компоненту преодолеть практически важный предел, поскольку длина известных установочных стаканов, как правило, больше указанной выше максимальной длины этого компонента (преобразователя импеданса), составляющей 150-200 мм.
Специалисту в данной области будет понятно, что изобретение никоим образом не ограничивается приведенными предпочтительными вариантами его осуществления. Напротив, прилагаемая формула изобретения охватывает также многие другие варианты и модификации. Например, в данном описании рассмотрен однопроводной зонд, выполненный из провода, изготовленного из нержавеющей стали и ничем не покрытого; однако, этим примером объем изобретения никоим образом не ограничен, и изобретение в равной степени применимо к таким же зондам, выполненным из других материалов и с различными покрытиями, к жестким зондам, выполненным в виде металлического стержня, а также к зондам, имеющим другую конфигурацию и другое поперечное сечение.
Предложен радарный уровнемер (2) FMCW-типа, предназначенный для определения расстояния до поверхности (7) продукта, находящегося в резервуаре (5), и содержащий трансивер (11), выполненный с возможностью посылать передаваемый электромагнитный сигнал и принимать возвращенный электромагнитный сигнал, отраженный от поверхности (7). Передаваемый электромагнитный сигнал имеет ширину полосы по меньшей мере 1 ГГц, отношение граничных частот (отношение максимальной частоты к минимальной) меньше 2,5 и верхнюю граничную частоту меньше 4 ГГц. Уровнемер (2) содержит механически подвешенный однопроводной зонд (9), входящий в продукт (6), находящийся в резервуаре (5), и согласующий компонент, обеспечивающий электрически согласованное соединение герметизированного электрического проходного ввода (21) и зонда (9). В предложенном уровнемере относительно дорогая успокоительная трубка, известная из уровня техники, заменена относительно дешевым однопроводным зондом (9), выполняющим функцию волновода поверхностной волны. Техническим результатом при реализации заявленной группы изобретений является устранение возмущений в радарном уровнемере FMCW-типа, используемого в резервуаре. 2 н. и 17 з.п. ф-лы, 8 ил.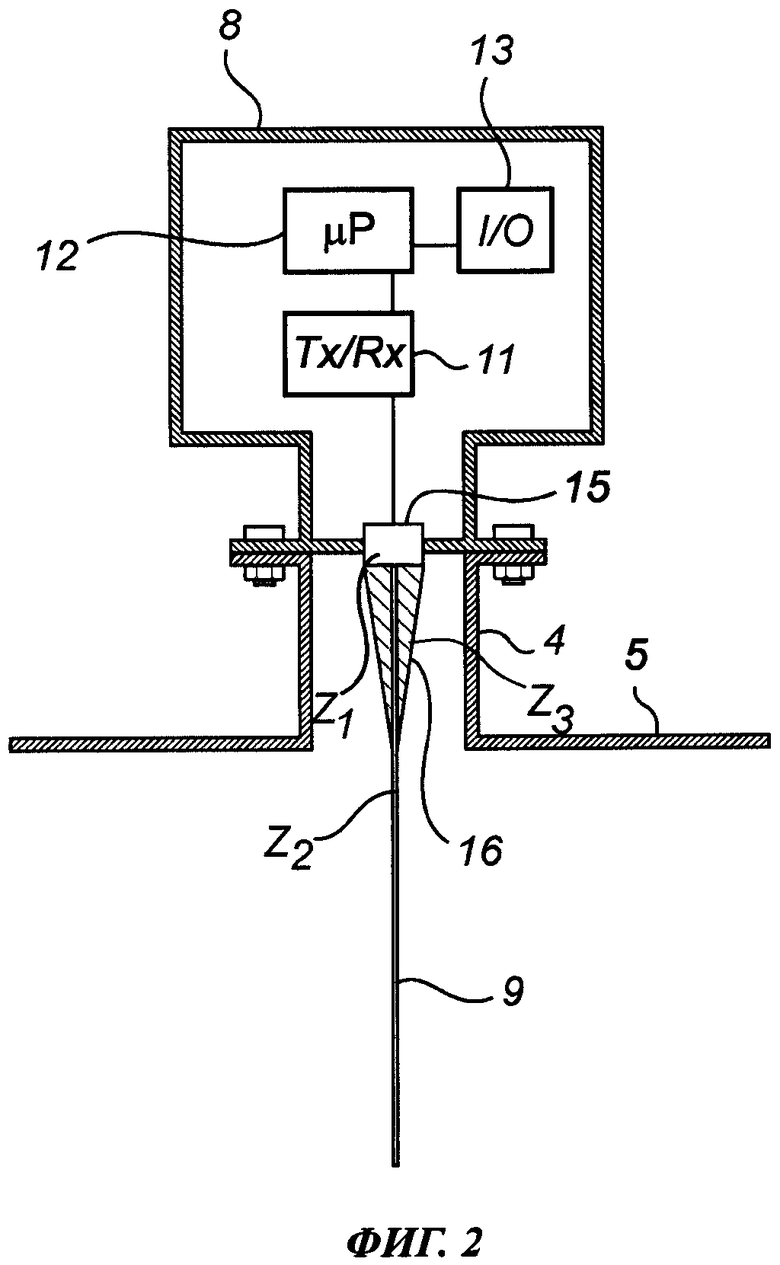
1. Радарный уровнемер (2) FMCW-типа, предназначенный для определения расстояния до поверхности (7) продукта, находящегося в резервуаре (5), и содержащий:
- контур (11) трансивера, выполненный с возможностью посылать передаваемый электромагнитный сигнал и принимать возвращенный электромагнитный сигнал (SR), отраженный от указанной поверхности, при этом в контуре трансивера находится модулятор (31, 32) частоты, выполненный с возможностью модулировать частоту передаваемого сигнала, изменяя ее в частотном диапазоне, ограниченном верхней граничной частотой и нижней граничной частотой,
- смеситель (35), выполненный с возможностью смешивать передаваемый электромагнитный сигнал и возвращенный электромагнитный сигнал, формируя сигнал с промежуточной частотой (IF),
- процессорный контур (12), выполненный с возможностью определять, используя сигнал с промежуточной частотой, требуемое расстояние, и
- герметизированный электрический проходной ввод (21), проходящий от контура (11) трансивера в резервуар,
отличающийся тем, что
- верхняя граничная частота составляет менее 4 ГГц, нижняя граничная частота по меньшей мере на 1 ГГц меньше верхней граничной частоты, а отношение верхней граничной частоты к нижней граничной частоте составляет менее 2,5, при этом уровнемер дополнительно содержит:
- однопроводной зонд (9), механически подвешенный в верхней части резервуара и входящий в продукт, находящийся в резервуаре, при этом указанный зонд электрически подключен к трансиверу и выполнен с возможностью направлять передаваемый электромагнитный сигнал в направлении указанной поверхности (7), а возвращаемый электромагнитный сигнал - в контур (11) трансивера, причем электрический проходной ввод имеет, со стороны однопроводного зонда, первый входной импеданс (Z1), а однопроводной зонд имеет, со стороны электрического проходного ввода, второй входной импеданс (Z2), который больше первого входного импеданса, и
- согласующий компонент (16), установленный между первым и вторым входными импедансами и обеспечивающий электрически согласованное соединение электрического проходного ввода и однопроводного зонда.
2. Уровнемер по п. 1, в котором согласующий компонент имеет по меньшей мере один промежуточный импеданс (Z3), который меньше первого входного импеданса, но больше второго входного импеданса.
3. Уровнемер по п. 1 или 2, в котором согласующий компонент (16) не выступает в рабочую зону резервуара.
4. Уровнемер по любому из предыдущих пунктов, в котором физический продольный размер согласующего компонента (16) меньше 20 см.
5. Уровнемер по любому из предыдущих пунктов, в котором электрический проходной ввод представляет собой коаксиальное соединение.
6. Уровнемер по любому из предыдущих пунктов, в котором однопроводной зонд (9) подвешен к электрическому проходному вводу (21).
7. Уровнемер по п. 6, в котором согласующий компонент представляет собой диэлектрическую втулку, коаксиально охватывающую верхний участок однопроводного зонда.
8. Уровнемер по любому из предыдущих пунктов, в котором однопроводной зонд выполнен как провод из коррозионностойкой стали без покрытия.
9. Уровнемер по любому из предыдущих пунктов, в котором передаваемый сигнал имеет нижнюю граничную частоту меньше 2 ГГц.
10. Уровнемер по любому из предыдущих пунктов, в котором передаваемый сигнал имеет верхнюю граничную частоту меньше 3 ГГц.
11. Уровнемер по любому из предыдущих пунктов, в котором отношение граничных частот в передаваемом сигнале меньше 2.
12. Уровнемер по любому из предыдущих пунктов, в котором логарифмический коэффициент отражения электромагнитного излучения от электрически согласованного соединения слабее, чем логарифмический коэффициент отражения электромагнитного излучения от поверхности продукта.
13. Уровнемер по любому из предыдущих пунктов, в котором в указанном интервале частот логарифмический коэффициент отражения от согласованного соединения меньше -10 дБ, предпочтительно меньше -15 дБ.
14. Способ радарного измерения уровня, предназначенный для определения расстояния до поверхности продукта, содержащегося в резервуаре, и включающий следующие операции:
- генерируют передаваемый электромагнитный сигнал,
- модулируют частоту передаваемого сигнала, изменяя ее в интервале частот, ограниченном верхней граничной частотой и нижней граничной частотой,
- подают передаваемый электромагнитный сигнал через электрический проходной ввод в резервуар,
- формируют возвращаемый электромагнитный сигнал, соответствующий отражению передаваемого электромагнитного сигнала от поверхности продукта,
- принимают возвращаемый электромагнитный сигнал,
- смешивают переданный электромагнитный сигнал и возвращенный электромагнитный сигнал, формируя сигнал с промежуточной частотой, и
- на основе сигнала с промежуточной частотой определяют искомое расстояние,
отличающийся тем, что
- верхняя граничная частота составляет менее 4 ГГц, нижняя граничная частота по меньшей мере на один ГГц меньше верхней граничной частоты, отношение верхней граничной частоты к нижней граничной частоте составляет менее 2,5, при этом способ дополнительно включает следующие операции:
- направляют передаваемый электромагнитный сигнал вдоль однопроводного зонда, который подвешен в резервуаре и входит в находящийся в резервуаре продукт,
- направляют возвращаемый электромагнитный сигнал обратно вдоль зонда и через электрический проходной ввод и
- обеспечивают электрически согласованное соединение между первым входным импедансом электрического проходного ввода со стороны однопроводного зонда и вторым входным импедансом данного зонда со стороны электрического проходного ввода, причем второй входной импеданс больше первого входного импеданса.
15. Способ по п. 14, в котором передаваемый сигнал имеет нижнюю граничную частоту меньше 2 ГГц.
16. Способ по п. 14 или 15, в котором передаваемый сигнал имеет верхнюю граничную частоту меньше 3 ГГц.
17. Способ по любому из пп. 14-16, в котором отношение граничных частот в передаваемом сигнале меньше 2.
18. Способ по любому из пп. 14-17, в котором отражение электромагнитного излучения от электрически согласованного соединения слабее, чем отражение электромагнитного излучения от поверхности продукта.
19. Способ по любому из пп. 14-18, в котором в указанном интервале частот логарифмический коэффициент отражения от согласованного соединения меньше -10 дБ, предпочтительно меньше -15 дБ.
| WO 9712211 A1, 03.04.1997 | |||
| US 2012299767 A1, 19.11.2012 | |||
| US 2012169523 A1, 05.07.2012 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И/ИЛИ КОНТРОЛЯ УРОВНЯ СРЕДЫ В РЕЗЕРВУАРЕ | 2004 |
|
RU2327117C2 |
| EP 1734348 A1, 20.12.2006 | |||
| US 5872494 A, 16.02.1999 | |||
| US 2009303106 A1, 10.12.2009. | |||

