Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и системам увеличения безопасности пользования лазерной системой зажигания.
Уровень техники
Двигательные системы на транспортных средствах (автомобилях), таких как гибридные электромобили и автомобили, рассчитанные для работы в режиме «стоп-старт» (idle-stop), могут быть построены с лазерной системой зажигания. Кроме инициирования воспламенения в цилиндрах, система лазерного зажигания может быть использована при пуске двигателя для точного определения положения поршня в каждом цилиндре, что позволяет выбрать соответствующий цилиндр в качестве первого, где будет производиться воспламенение. Как таковая, эта возможность улучшает способность двигателя к перезапуску.
Системы лазерного зажигания могут периодически проходить диагностику. Согласно одному примеру, технический специалист сервисной организации может снимать лазерное устройство для проверки системы. Однако признано, что при такой диагностике потенциально могут происходить травмы. Например, импульс лазерного излучения на выходе устройства во время диагностики может представлять серьезную опасность для глаз. Например, если неопытный механик, которому неизвестно о высокой пиковой мощности излучения лазерного устройства, ощупывает или неумело обращается с устройством лазерного зажигания во время испытания, выходящий лазерный луч может попасть кому-нибудь в глаз и потенциально вызвать необратимые повреждения.
Раскрытие изобретения
Согласно одному примеру, некоторые из вышеупомянутых проблем могут быть решены системой и способом защитной блокировки лазерного зажигания. Способ может содержать управление работой устройства лазерного зажигания двигателя, основанное на положении указанного устройства относительно цилиндра двигателя. Таким образом, лазерное устройство системы зажигания двигателя может быть выключено при его извлечении из цилиндра.
К примеру, система лазерного зажигания может быть использована для формирования импульсов излучения высокой мощности для воспламенения воздушно-топливной смеси в цилиндре, в условиях, когда в цилиндре должно происходить горение. В условиях, когда в цилиндре не должно происходить горения, система лазерного зажигания может быть использована для определения положения поршня в цилиндре путем испускания лазерного излучения малой мощности в цилиндр с целью определения расстояния до поршня относительно устройства лазерного зажигания. К примеру, это расстояние может быть определено на основе времени, прошедшего с момента излучения лазерного импульса до момента обнаружения лазерного импульса. Помимо использования информации о положении поршня для выбора цилиндра двигателя для процедуры перезапуска двигателя, измеренное расстояние может также быть использовано для определения того, было ли снято устройство лазерного зажигания с цилиндра. Точнее, если полученное расстояние между поршнем и устройством лазерного зажигания больше пороговой величины (причем пороговая величина зависит от длины цилиндра или максимально возможного расстояния между поршнем и устройством, например, когда поршень находится в нижней мертвой точке), можно сделать вывод, что лазерное устройство было снято с цилиндра (например, для испытания). Соответственно, устройство лазерного зажигания блокируется, так чтобы устройство не испускало никаких лазерных импульсов, даже при наличии команды. Устройство лазерного зажигания может быть разблокировано только после подтверждения того, что устройство снова было установлено на цилиндр (например, после сигнала переустановки от оператора). Таким образом, для устройства лазерного зажигания обеспечивается защитная блокировка, которая снижает вероятность получения травм, возникающих, когда с лазерным устройством работают вне цилиндра.
Следует понимать, что содержащиеся в данном разделе сведения приведены с целью ознакомления в упрощенной форме с некоторыми идеями, которые далее рассмотрены в описании подробно. Данный раздел не предназначен для формулирования ключевых или существенных признаков объекта изобретения, которые изложены в пунктах формулы изобретения. Более того, объект изобретения не ограничен вариантами осуществления, которые решают проблемы недостатков, упомянутых в данном описании.
Краткое описание чертежей
Фиг. 1 схематически изображает пример двигателя внутреннего сгорания, оснащенного системой лазерного зажигания.
Фиг. 2 изображает пример излучения лазерного импульса в цилиндр двигателя и его обнаружения с целью определения, находится ли поршень в нормальном диапазоне расстояний от устройства лазерного зажигания.
Фиг. 3 изображает блок-схему высокого уровня для алгоритма способа блокировки устройства лазерного зажигания в цилиндре, основанного на определении положения поршня в цилиндре.
Фиг. 4 изображает пример регулирования выходной мощности устройства лазерного зажигания, основанного на определении положения поршня в цилиндре.
Осуществление изобретения
В изобретении предложены способы и системы для блокировки устройства лазерного зажигания в двигательной системе, оснащенной системой лазерного зажигания, например, в двигательной системе, изображенной на фиг. 1. В условиях, когда в цилиндре не должно происходить горения, положение поршня можно определять путем излучения лазерных импульсов малой мощности в цилиндр посредством системы лазерного зажигания и обнаружения их отражения от верхней поверхности поршня цилиндра, как показано на фиг. 2. Контроллер может быть выполнен с возможностью исполнения управляющей программы, такой как программа, изображенная на фиг. 3, для осуществления перевода устройства лазерного зажигания из режима высокой мощности, когда действуют условия для горения в цилиндре (чтобы воспламенить в цилиндре воздушно-топливную смесь), в режим малой мощности, когда действуют условия для отсутствия горения в цилиндре, и обратно, в целях определения положения поршня цилиндра и расстояния поршня до лазерного устройства. Контроллер, на основе полученной оценки положения может подтверждать факт того, что устройство лазерного зажигания установлено в цилиндре, и может блокировать устройство в условиях, когда последнее было снято с цилиндра. Фиг. 4 иллюстрирует пример блокирования устройства лазерного зажигания при его снятии с цилиндра двигателя.
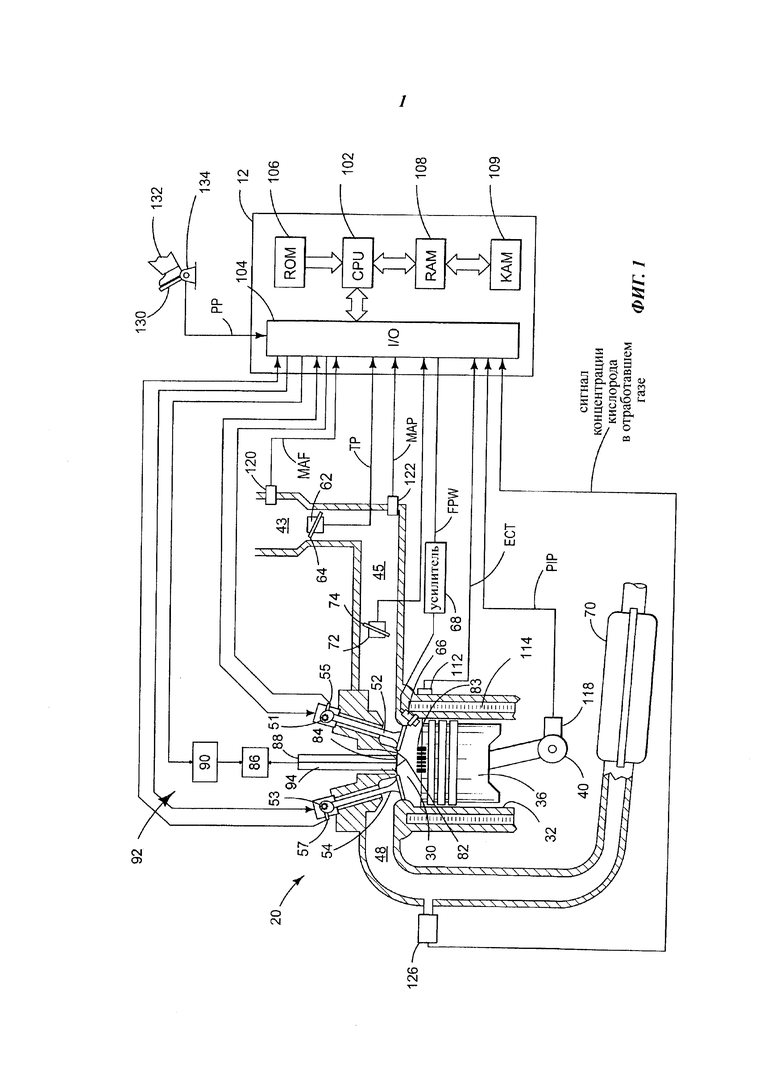
Фиг. 1 схематически изображает пример многоцилиндрового двигателя 20 внутреннего сгорания. Управление двигателем 20 по меньшей мере частично может осуществляться системой управления, содержащей контроллер 12, и командами со стороны оператора 132 транспортного средства, подаваемыми через устройство 130 ввода. В данном примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования сигнала PP (Pedal Position), пропорционального положению педали.
Камера сгорания 30 двигателя 20 может содержать стенки 32 цилиндра и расположенный внутри поршень 36. Поршень 36 может быть связан с коленчатым валом 40, и таким образом возвратно-поступательное движение поршня может быть преобразовано во вращательное движение коленчатого вала. Коленчатый вал 40 может быть связан по меньшей мере с одним ведущим колесом автомобиля через промежуточную систему трансмиссии. Цилиндр 30 может принимать воздух из впускного коллектора 45 и впускного канала 43, и может выпускать отработавшие газы через выпускной канал 48. Впускной коллектор 45 и выпускной канал 48 могут выборочно сообщаться с цилиндром 30 через соответственно впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления цилиндр 30 может содержать два или более впускных клапанов и/или два или более выпускных клапанов.
В данном примере, впускным клапаном 52 и выпускным клапаном 54 можно управлять при помощи кулачков через соответствующие системы 51 и 53 кулачкового привода. Каждая система 51 и 53 кулачкового привода может включать в себя один или более кулачков, и каждая из них может реализовывать одну или более систем газораспределения: систему CPS переключения профилей кулачков (Cam Profile Switching), систему VCT изменения фаз газораспределения (Variable Cam Timing), систему WT переменного газораспределения (Variable Valve Timing) и/или систему WL переменного газораспределения с регулированием высоты подъема клапанов (Variable Valve Lift), которые могут приводиться в действие контроллером 12 с целью изменения фазы срабатывания клапанов. Чтобы дать возможность определения положения кулачков, системы 51 и 53 кулачкового привода должны содержать зубчатые колеса. Положение впускного клапана 52 и выпускного клапана 54 может быть определено соответственно датчиками положения 55 и 57. В иных вариантах, управление впускным клапаном 52 и/или выпускным клапаном 54 может осуществляться путем приведения в действие электромагнита (электромагнитный клапан). Например, как вариант, цилиндр 30 может содержать впускной клапан, управляемый электромагнитом, и выпускной клапан, управляемый кулачковым приводом системы CPS и/или VCT.
Показано, что топливная форсунка 66 связана непосредственно с цилиндром 30 для осуществления прямого впрыска топлива пропорционально длительности импульса сигнала FPW (Fuel Pulse Width), получаемого от контроллера 12 через электронный драйвер 68 (усилитель). Таким образом, топливная форсунка 66 обеспечивает то, что называется прямым впрыском топлива в цилиндр 30. Топливная форсунка может быть установлена на боковой стороне цилиндра, или, например, в верхней части цилиндра. Доставка топлива к топливной форсунке 66 может осуществляться посредством топливной системы (не показана), содержащей топливный бак, топливный насос и топливную рейку. В каких-то вариантах осуществления, цилиндр 30 может, как вариант или дополнительно, содержать топливную форсунку, установленную на впускном канале 43, согласно конструкции, которая обеспечивает впрыск топлива во впускной канал, в точку перед цилиндром 30.
Впускной канал 43 может содержать клапан 72 управления движением заряда (CMCV, Charge Motion Control Valve) с заслонкой 74, и может также содержать дроссель 62 с дроссельной заслонкой 64. В данном конкретном примере, контроллер 12 может изменять положение дроссельной заслонки 64 путем подачи сигнала на электродвигатель или исполнительный элемент, который входит в состав дросселя 62, реализуя то, что называют «электронным управлением дросселем» (ETC, Electronic Throttle Control). Таким образом, дроссель 62 можно приводить в действие, чтобы регулировать впуск воздуха в цилиндр 30 - один среди прочих цилиндров двигателя. Впускной канал 43 может содержать датчик 120 массового расхода воздуха, и датчик 122 давления воздуха в коллекторе для формирования соответствующих сигналов MAF (Mass Air Flow) и MAP (Manifold Absolute Pressure) для контроллера 12.
Показано, что к выпускному каналу 48 перед каталитическим нейтрализатором 70 присоединен датчик 126 выхлопных газов. Датчик 126 может представлять собой любой подходящий датчик из ряда датчиков, определяющих воздушно-топливное отношение исходя из состава отработавших газов, например, линейный кислородный датчик или универсальный, или широкодиапазонный датчик содержания кислорода в отработавших газах (UEGO, Universal Exhaust Gas Oxygen), кислородный датчик с двумя состояниями (EGO, Exhaust Gas Oxygen), нагреваемый датчик содержания кислорода в отработавших газах (HEGO, Heated Exhaust Gas Oxygen), датчик NOx, HC или CO. Система выпуска отработавших газов может содержать каталитические нейтрализаторы с нормированной температурой (light-off) начала эффективной работы, устанавливаемые в выпускном коллекторе, и нейтрализаторы, устанавливаемые под днищем (underbody), а также выпускной коллектор и датчики воздушно-топливного отношения, устанавливаемые выше по потоку отработавших газов и/или ниже по потоку отработавших газов. Согласно одному примеру, каталитический нейтрализатор 70 может содержать несколько каталитических блоков. В другом примере, могут быть использованы несколько устройств снижения токсичности выбросов, каждое из которых содержит несколько каталитических блоков. Например, каталитический нейтрализатор 70 может представлять собой трехкомпонентный нейтрализатор.
На фиг. 1 показан контроллер 12 в виде микрокомпьютера, содержащего: микропроцессорное устройство 102 (CPU, Central Processor Unit), порты 104 ввода/вывода (I/O, Input/Output), электронную среду хранения исполняемых программ и калибровочных значений, изображенную в виде постоянного запоминающего устройства 106 (ROM, Read-only Memory), оперативное запоминающее устройство 108 (RAM, Random Access Memory), энергонезависимое запоминающее устройство 109 (KAM, Keep Alive Memory) и шину данных. Контроллер 12 может принимать различные сигналы от датчиков, связанных с двигателем 20, дополнительно к тем сигналам, о которых говорилось выше, включая: сигнал MAF измеренного массового расхода воздуха, наддуваемого в двигатель, от датчика 120 массового расхода; сигнал ЕСТ температуры хладагента двигателя (Engine Coolant Temperature) от датчика 112, связанного с рубашкой 114 охлаждения; в некоторых примерах - сигнал PIP профиля зажигания (Profile Ignition Pick-up) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 40, сигнал TP (Throttle Position) положения заслонки от датчика положения дроссельной заслонки, и сигнал MAP абсолютного давления в коллекторе (MAP, Manifold Absolute Pressure) отдатчика 122. Датчик 118 на эффекте Холла может быть включен в двигатель 20 в качестве дополнения, поскольку по своим возможностям он действует аналогично рассматриваемой здесь лазерной системе двигателя. В постоянное запоминающее устройство 106 могут быть записаны данные, считываемые компьютером, и представляющие инструкции, исполняемые процессором 102 для осуществления рассматриваемых ниже способов, а также их вариантов.
Лазерная система 92 содержит лазерный возбудитель 88, лазерную систему 94 обнаружения, и устройство 90 управления лазером (УУЛ). УУЛ 90 заставляет лазерный возбудитель 88 генерировать энергию лазерного излучения. УУЛ 90 может принимать рабочие инструкции от контроллера 12. Лазерный возбудитель 88 содержит лазерную генераторную часть 86 и светособирающую часть 84. Светособирающая часть 84 собирает лазерное излучение, сформированное лазерной генераторной частью 86, в фокальной точке 82 цилиндра 30.
Лазерная система 92 выполнена с возможностью работы более чем в одном качестве, при этом фаза каждой операции основана на положении элементов двигателя внутри четырехтактного цикла его работы. Например, энергия лазера может быть использована для воспламенения воздушно-топливной смеси во время рабочего такта поршня двигателя, включая время прокрутки двигателя, время прогрева двигателя и работу двигателя в прогретом состоянии. Топливо, впрыскиваемое топливной форсункой 66, может образовывать воздушно-топливную смесь на протяжении по меньшей мере части такта впуска, при этом воспламенение воздушно-топливной смеси энергией лазерного излучения, созданного лазерным возбудителем 88, инициирует горение воздушно-топливной смеси, которая в иных обстоятельствах не должна была бы гореть, и приводит поршень 36 в движение в направлении вниз. Энергия лазерного излучения может также быть использована для определения положения элементов двигателя, включая положения поршней различных цилиндров, в то время как двигатель находится в покое (например, при работе в режиме «стоп-старт»). Информация о положении поршней может быть использована для выбора цилиндра двигателя, с которого следует начинать воспламенение во время перезапуска двигателя. Как будет рассмотрено ниже, энергия лазерного излучения может также быть использована для измерения расстояния от лазерного устройства до поршня. Измеренное расстояние может быть использовано для определения, установлено лазерное устройство на головку цилиндра или снято с головки.
УУЛ 90 может задавать лазерному возбудителю 88 направление, чтобы фокусировать энергию излучения в различных точках цилиндра в зависимости от рабочих условий. Например, энергия лазерного излучения может быть сфокусирована в точке, лежащей в стороне от стенки 32 цилиндра, на внутренней области цилиндра 30. Согласно одному примеру, место фокусировки включает область вблизи верхней мертвой точки (TDC, Top Dead Center) рабочего такта, когда энергия лазерного излучения используется для воспламенения воздушно-топливной смеси. Согласно другому примеру, место фокусировки включает верхнюю поверхность поршня цилиндра, когда энергия излучения используется для определения положения поршня и факта установки лазерного устройства. Кроме того, лазерный импульс может считывать идентификационную метку на поверхности поршня. Например, каждый поршень может содержать на верхней поверхности уникальный штрихкод, который заключает в себе идентифицирующую информацию, относящуюся к соответствующему цилиндру. Во время определения положения поршня импульс лазерного излучения может быть сфокусирован на штрихкоде 83, нанесенном на поршне 36, чтобы определить, установлено ли на цилиндре устройство 88 лазерного зажигания. Поскольку каждый штрихкод уникален для поршня данного цилиндра, ошибочное считывание штрихкода может указывать на то, что устройство лазерного зажигания снято с данного конкретного цилиндра, и соответственно, должны быть предприняты действия для блокирования устройства. Согласно одному примеру, штрихкод может быть неотъемлемой частью поршня, поскольку бумага бы выгорела. Согласно другому примеру, штрихкод может быть включен в литье поршня или отштампован после литья. С другой стороны, на головке поршня может быть отштампована некоторая геометрическая фигура или буквенно-цифровые символы, которые могут быть видны для оптического устройства, и могут быть обработаны для подтверждения правильности установки лазера.
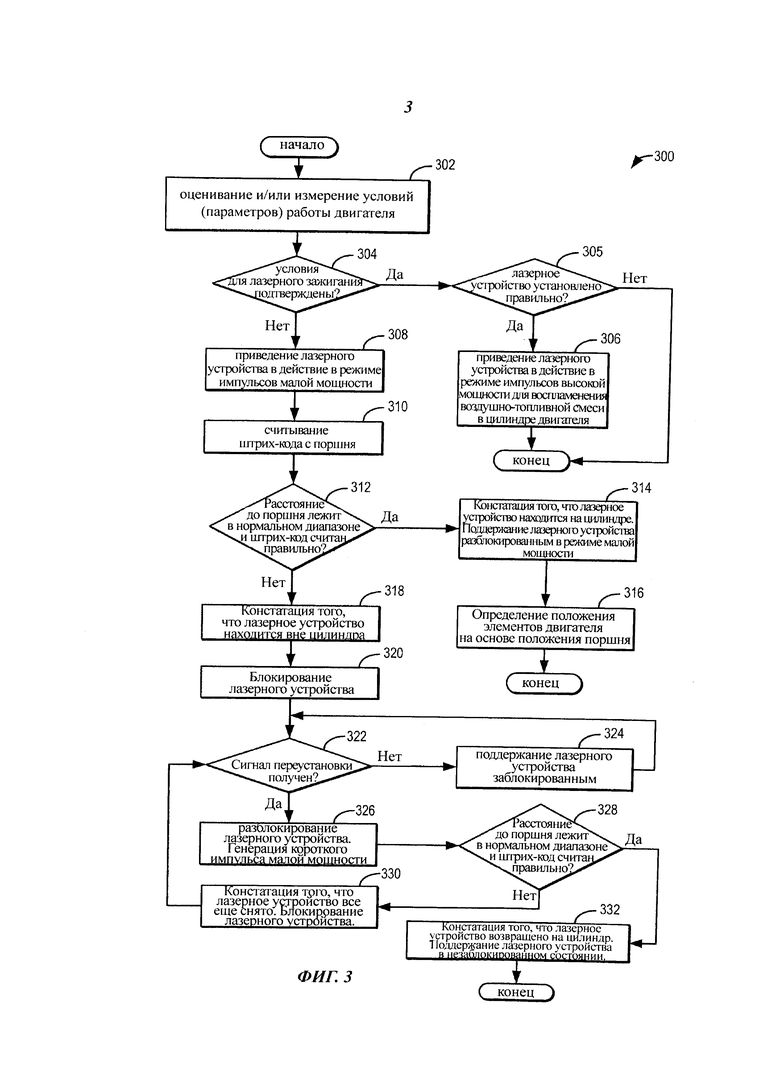
На фиг. 2 изображен пример работы лазерной системы 92, которая включает в себя лазерный возбудитель 88, систему 94 обнаружения и УУЛ 90. УУЛ 90 заставляет лазерный возбудитель 88 генерировать и излучать импульсы световой энергии, которые направлены в сторону верхней поверхности 213 поршня 36, точнее, в направлении штрихкода 83, как это показано стрелками 202. УУЛ 90 может получать рабочие инструкции от контроллера 12, например, инструкции по режиму мощности. Например, при условиях, когда требуется воспламенение, УУЛ 90 может приводиться в действие в режиме повышенной мощности, так чтобы лазерная система 92 излучала световые импульсы увеличенной интенсивности и частоты для воспламенения воздушно-топливной смеси в цилиндре. Согласно другому примеру, при условиях, когда воспламенение не требуется, УУЛ 90 может приводиться в действие в режиме пониженной мощности, так чтобы лазерная система 92 излучала световые импульсы уменьшенной интенсивности для точного измерения расстояния от вершины поршня до вершины цилиндра. Согласно одному примеру, для определения положения одного или более поршней в двигателе, во время действия режима пониженной мощности может использоваться частотная модуляция лазерного импульса с повторяющимся линейным изменением частоты. Датчик 94 положения, расположенный в верхней части цилиндра, может по конструкции быть выполнен как часть лазерной системы, и может принимать ответный импульс 204, отраженный от верхней поверхности 213 поршня 36.
Контроллер может определять положение поршня на основе времени, которое проходит между излучением лазерного импульса устройством лазерного зажигания в цилиндр и обнаружением отраженного лазерного импульса (после отражения от поршня) детектором. Алгоритм, определяющий расстояние по времени, может преобразовывать время, затрачиваемое на прохождение дистанции, для точного определения положения поршня. Как таковое, расстояние между поршнем и устройством лазерного зажигания может изменяться в интервале 216, у которого имеется верхний предел 218, соответствующий максимально возможному расстоянию (которое возникает, когда поршень находится в нижней мертвой точке, BDC, Bottom Dead Center), и нижний предел 217, соответствующий минимально возможному расстоянию (которое возникает, когда поршень находится в верхней мертвой точке, TDC). Например, когда поршень расположен в TDC, время, которое проходит между излучением лазерного импульса устройством лазерного зажигания в цилиндр и обнаружением лазерного импульса после его отражения от поршня, будет короче, и расстояние также будет меньше. Однако, когда поршень расположен в BDC, затраченное время будет больше, и соответствующее расстояние будет больше. Согласно другому примеру, интервал 216 соответствует длине цилиндра.
Согласно некоторым примерам, положение поршня и расстояние до поршня можно определять методами частотной модуляции, при которых используют частотно-модулированные лазерные пучки с повторяющимся линейным изменением частоты. Как вариант, для определения расстояния могут применяться методы, основанные на фазовом сдвиге. Путем наблюдения Допплеровского сдвига или путем сравнения типовых положений в два разных момента времени можно получать информацию о положении поршня, скорости и частоте вращения двигателя (в об/мин). Тогда, чтобы определить фактическое положение элементов двигателя, можно при помощи датчиков 55 и 57 положения установить положение впускного клапана 52 и выпускного клапана 54. Как только будет определено положение и/или скорость каждого поршня в двигателе, контроллер, например, контроллер 12 сможет обработать эту информацию для формирования сводной таблицы положений элементов двигателя или рабочего режима двигателя. Такая сводная таблица положений элементов двигателя, в основе которой лежат данные положений поршней, полученные при помощи лазеров, может дополнительно зависеть от геометрии двигателя. Например, сводная таблица положений элементов двигателя может зависеть от того, является схема расположения цилиндров двигателя V-образной или линейной. Как только сигналы относительных положений элементов двигателя укажут, что двигатель синхронизировался, информация системы может также быть использована для определения угла поворота коленчатого вала и положения кулачков, чтобы получить данные TDC и BDC для каждого поршня двигателя.
Когда устройство лазерного зажигания установлено на цилиндре, измеренное положение поршня и измеренное расстояние между поршнем и устройством лазерного зажигания лежат в интервале 216. Однако, если устройство лазерного зажигания снять с цилиндра, измеренное положение поршня и измеренное расстояние между поршнем и устройством лазерного зажигания могут превысить интервал 216. Контроллер может сравнивать время, необходимое для обнаружения отраженного лазерного импульса с пороговой величиной (или сравнивать расстояние между лазерным устройством и поршнем с пороговой величиной), чтобы определить, установлено устройство лазерного зажигания на цилиндре или снято с цилиндра. Согласно одному примеру, во время диагностического испытания устройства лазерного зажигания техник сервисной организации может снять лазерное устройство с цилиндра. Если измеренное расстояние будет больше пороговой величины (причем пороговая величина зависит от длины цилиндра, или зависит от расстояния до поршня, когда поршень находится в BDC), то можно констатировать, что устройство лазерного зажигания было снято с цилиндра. Аналогичным образом, если измеренное время, которое прошло до обнаружения отраженного лазерного импульса, больше времени, которое требуется для обнаружения отраженного лазерного импульса, когда поршень находится в BDC, можно констатировать, что имело место снятие устройства лазерного зажигания.
Согласно одному примеру, когда лазерное устройство размещено на цилиндре, в силу того, что расстояние от лазерной системы 92 до верхней поверхности 213 поршня оказывается меньшим, обнаружение лазерного импульса системой 94 может происходить во временном интервале порядка пикосекунд. Для сравнения, когда лазерное устройство находится вне цилиндра, в силу того, что расстояние от лазерной системы 92 до верхней поверхности 213 поршня оказывается большим чем интервал 216, обнаружение лазерного импульса системой 94 может происходить во временном интервале гораздо большем, чем ожидаемый оптимальный интервал, например, в интервале порядка наносекунд. Согласно одному примеру, величина, равная 1 нс, может быть принята в качестве контрольной или пороговой величины для сравнения измеренной разности времен, чтобы установить, находится ли лазер вне цилиндра. Таким образом, если произошло излучение лазерного импульса, а для обнаружения отраженного импульса потребовалось время, большее 1 нс, можно сделать вывод, что устройство лазерного зажигания с соответствующего цилиндра снято.
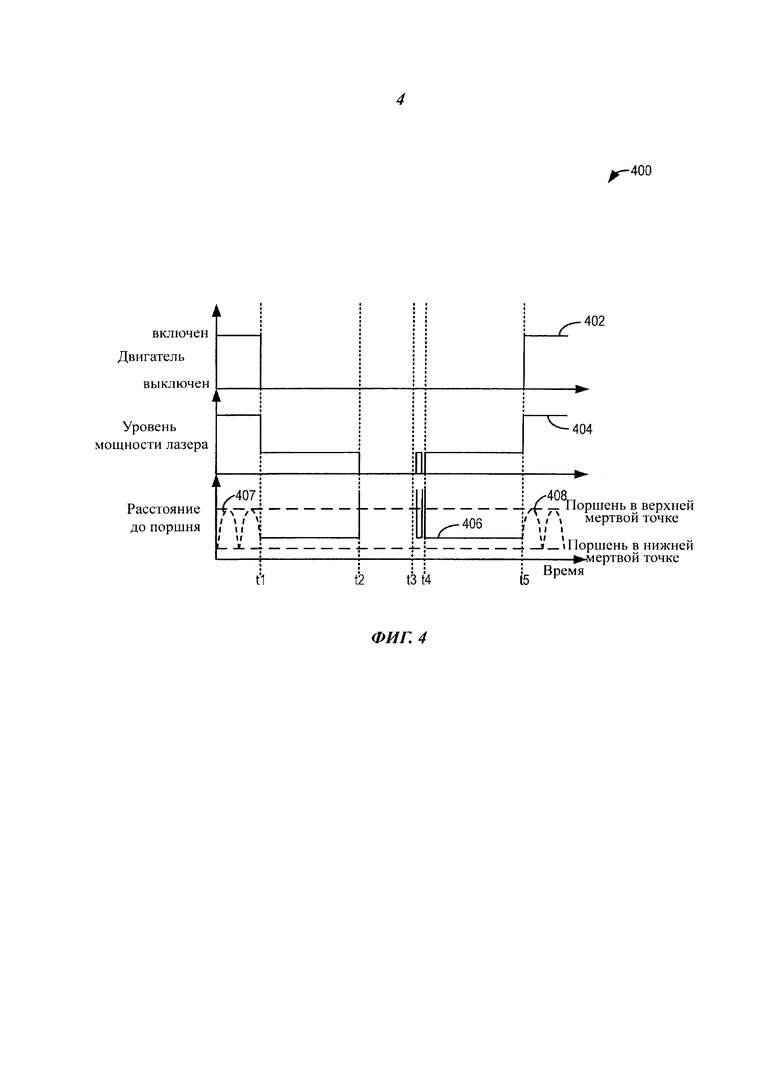
На фиг. 3 в качестве примера изображена блок-схема алгоритма способа для изменения режима работы устройства лазерного зажигания, связанного с цилиндром двигателя, в основе которого лежит заключение о положении устройства относительно поршня в цилиндре. В частности, способ включает в себя приведение лазерной системы в действие для определения того, соединено устройство лазерного зажигания с цилиндром или снято с цилиндра. Устройство, соответственно, может быть разблокировано или заблокировано. Как таковое, устройство лазерного зажигания можно также приводить в действие для воспламенения воздушно-топливной смеси в цилиндре во время фазы горения.
На шаге 302 способ предусматривает оценивание и/или прогнозирование условий (параметров) работы двигателя. В число таких условий (параметров) могут входить, например, частота вращения вала двигателя, температура двигателя, температура катализатора, уровень форсировки, MAP, MAF, наружные условия (температура, давление, влажность и т.п.). На шаге 304 производится проверка наличия запроса на лазерное зажигание. Например, если действуют условия для горения в цилиндре, то может быть констатировано, что есть запрос на лазерное зажигание. Если на шаге 304 определено, что должно быть выполнено лазерное зажигание, то на шаге 305 производится проверка правильности установки лазерного устройства на цилиндре. Согласно одному примеру, правильность установки может быть подтверждена правильным считыванием штрихкода с поршня. Например, лазерное устройство может сканировать указанную область штрихкода. Когда чередующиеся темные и светлые зоны отражают свет в последовательности, определяемой шириной штрихов, фотоприемник может идентифицировать указанную последовательность отраженных световых импульсов, и удостоверить факт установки. Если каждый цилиндр снабжен своим отличающимся штрихкодом, то тогда можно также идентифицировать и считываемый цилиндр. Таким образом, если лазер повторно установить на чужой цилиндр, система управления может выдать код ошибки или сообщение, что лазер стоит не на том цилиндре. Если в системе используется ПЗС-камера, то с верхней поверхности поршня можно считывать буквенно-цифровые символы, и обрабатывать способом, аналогичным обработке штрихкода.
Если правильная установка не подтверждена, то алгоритм завершает свою работу. Только при подтверждении правильности установки лазерного устройства, на шаге 306 устройство лазерного зажигания может быть приведено в действие в режиме повышенной мощности, и произведено излучение мощных импульсов в цилиндр двигателя. Лазерные импульсы высокой мощности могут быть использованы для воспламенения воздушно-топливной смеси в цилиндре, и, тем самым, инициирования горения в цилиндре.
Если на шаге 304 не подтверждены условия для лазерного зажигания, то тогда на шаге 308 устройство лазерного зажигания может быть приведено в действие в режиме пониженной мощности, и может излучать внутрь цилиндра импульсы малой мощности. Например, устройство лазерного зажигания может быть приведено в действие в режиме пониженной мощности при условиях, когда не требуется горение в цилиндре, в то время как двигатель остановлен или выключен (например, переведен в режим «стоп-старт»). Режим пониженной мощности может использоваться для определения положения поршня в цилиндре. Например, перед первым актом воспламенения из состояния покоя устройство лазерного зажигания может быть задействовано в режиме малой мощности для измерения расстояния между указанным устройством и поршнем цилиндра. Может быть произведено излучение лазерного импульса малой мощности внутрь цилиндра. Излученный лазерный импульс затем отражается от верхней поверхности поршня, и отраженный импульс обнаруживается устройством обнаружения. Производится измерение времени, которое проходит между излучением лазерного импульса и обнаружением отраженного импульса. Значение времени затем преобразуется в значение расстояния, чтобы определить дистанцию между устройством лазерного зажигания и поршнем цилиндра, и, тем самым, сделать заключение о положении поршня в цилиндре. Путем определения положения поршня в цилиндре можно определить положение элементов двигателя, включая такт цилиндра. Контроллер может использовать данные положения элементов двигателя и положения поршня, собранные при условиях, когда не требуется горение в цилиндре, чтобы выбрать цилиндр для первого акта воспламенения во время последующего пуска двигателя. Например, данные положения поршня и положения элементов двигателя могут быть использованы для определения первого цилиндра, в котором следует производить зажигание и инициировать горение во время перезапуска двигателя в режиме работы «стоп-старт».
На шаге 310 устройство лазерного зажигания может также считать штрихкод, находящийся на верхней поверхности поршня. Например, световой импульс малой мощности может отражаться и считывать штрихкод 83 (как показано на фиг. 2). Поскольку штрихкод для каждого поршня является уникальным для соответствующего цилиндра, путем считывания штрихкода можно определить положение конкретного поршня, и можно подтвердить идентичность соответствующего цилиндра. Кроме того, как будет рассмотрено ниже, в случае, если устройство лазерного зажигания цилиндра было снято, данные штрихкода могут быть использованы для идентификации цилиндра, с которого указанное устройство было снято.
Чтобы считать штрихкод, лазерное устройство может просканировать указанную область штрихкода. Когда чередующиеся темные и светлые зоны отражают свет в последовательности, определяемой шириной штрихов, фотоприемник может идентифицировать указанную последовательность отраженных световых импульсов, и удостоверить факт установки. Если каждый цилиндр снабжен своим отличающимся штрихкодом, то тогда можно также идентифицировать и считываемый цилиндр. Таким образом, если при обратной установке лазер поставят не на тот цилиндр, система управления может выдать код ошибки или сообщение, указывающее, что лазер установлен на чужой цилиндр. Если в системе используется ПЗС-камера, то с верхней поверхности поршня можно считывать буквенно-цифровые символы, и обрабатывать способом, аналогичным обработке штрихкода.
Итак, установлено, что дополнительно к получению информации, касающейся положения поршня цилиндра, оценка расстояния между устройством лазерного зажигания и поршнем может также быть использована для определения, было ли устройство лазерного зажигания снято с цилиндра (или снято с головки цилиндров). В частности, в то время как устройство лазерного зажигания установлено на цилиндре, поршень может находиться в любом положении внутри интервала, который определен верхним пределом и нижним пределом. Как уже говорилось в отношении фиг. 2, верхний предел интервала соответствует положению, когда поршень находится в BDC, и расстояние между поверхностью поршня и лазерным устройством максимальное, в то время как нижний предел интервала соответствует положению, когда поршень находится в TDC, и расстояние между поверхностью поршня и лазерным устройством минимальное. Для сравнения, если устройство лазерного зажигания снять с цилиндра, то расстояние может оказаться за пределами ожидаемого интервала. В качестве другого примера, в то время как устройство лазерного зажигания установлено на цилиндре, полученное положение поршня может быть в пределах пороговой дистанции устройства лазерного зажигания, при этом пороговая величина зависит от расстояния между лазерным устройством и поршнем, когда поршень находится в BDC, и расстоянием, когда поршень находится в TDC. Для сравнения, если устройство лазерного зажигания снять с цилиндра, то полученное положение поршня может оказаться большим, чем пороговое расстояние.
И далее, поскольку получаемые данные положения поршня основаны на том времени, которое проходит с момента излучения светового импульса устройством лазерного зажигания в цилиндр двигателя до момента обнаружения лазерного импульса (детектором системы лазерного зажигания) после его отражения от верхней поверхности поршня, в то время как устройство лазерного зажигания установлено на цилиндре, время, которое проходит до обнаружения лазерного импульса, может находиться в пределах пороговой продолжительности, причем пороговая продолжительность зависит от времени, которое проходит, когда поршень находится в BDC, и времени, которое проходит, когда поршень находится в TDC. Для сравнения, если устройство лазерного зажигания снять с цилиндра, то время, которое проходит до обнаружения лазерного импульса, может оказаться больше пороговой продолжительности.
На шаге 312 производится проверка, лежит ли расстояние от устройства лазерного зажигания до поршня в нормальном или ожидаемом интервале, и считан ли правильный штрихкод. В ином варианте можно произвести проверку, находится ли указанное расстояние в пределах пороговой дистанции, при этом пороговая дистанция зависит от длины цилиндра. Если расстояние находится в ожидаемом интервале (например, в пределах пороговой дистанции), то на шаге 314 может быть сделан вывод, что устройство лазерного зажигания установлено на цилиндре (то есть устройство не было снято). В ответ на констатацию того, что устройство лазерного зажигания находится на цилиндре, контроллер может поддерживать лазерное устройство в режиме малой мощности, чтобы продолжать излучение импульсов малой мощности для измерения положения поршня в цилиндре. На шаге 316 на основе полученных данных положения поршня может быть определено положение элементов двигателя. Например, может быть определен такт цилиндра. Контроллер может использовать эти данные для выбора цилиндра двигателя, в котором следует произвести первый акт воспламенения, когда впоследствии будут подтверждены условия для осуществления лазерного зажигания. Когда происходит подтверждение условий для осуществления лазерного зажигания, устройство лазерного зажигания переводится в режим повышенной мощности излучения, о чем уже шла речь в отношении шага 306.
На шаге 318, если оценка расстояния поршня лежит за пределами ожидаемого интервала, или расстояние превышает пороговую дистанцию, делается заключение, что устройство лазерного зажигания было снято с цилиндра. Например, устройство лазерного зажигания может быть снято с цилиндра техником сервисной организации во время диагностической процедуры испытания лазерного устройства. В результате того, что сделан вывод о нахождении устройства вне цилиндра, на шаге 320 алгоритм блокирует работу устройства лазерного зажигания. Например, мощность импульсов, излучаемых устройством лазерного зажигания, может быть существенно уменьшена. Согласно другому примеру, блокирование заключается в полном запрете излучения световых импульсов устройством лазерного зажигания, когда устройство принимает команду на работу лазера. Блокировку можно осуществлять, используя средства аппаратного и/или программного регулирования. Аппаратное регулирование может заключаться, например, в срабатывании переключателя (например, разъединителя цепи) для прерывания тока в устройстве лазерного зажигания, и тем самым блокирования лазерного устройства. Программное регулирование может заключаться, например, в использовании рабочего кода, который хранится в памяти контроллера, и который (на время) блокирует излучение лазерных импульсов в ответ на команду оператора произвести излучение.
Как таковое, устройство лазерного зажигания поддерживается в заблокированном режиме, пока не будет получен сигнал установки устройства на цилиндр. В этот момент устройство лазерного зажигания может быть разблокировано. Точнее, на шаге 322 может быть произведена проверка, получен ли от оператора сигнал переустановки. Согласно одному примеру, техник сервисной организации может нажать на кнопку переустановки ("reset") и тем самым подать сигнал переустановки после завершения диагностики устройства лазерного зажигания и обратной установки лазерного устройства на цилиндр. Если подтверждения сигнала переустановки нет, то на шаге 324 алгоритм поддерживает устройство лазерного зажигания в заблокированном состоянии. В данном случае алгоритм может продолжать делать вывод, что лазерное устройство снято с цилиндра, и устройство лазерного зажигания может оставаться заблокированным, чтобы уменьшить вероятность травмирования персонала.
Если подтверждено получение сигнала переустановки, то на шаге 326 лазерное устройство может быть разблокировано, и может быть произведено излучение короткого импульса малой мощности. Этот короткий импульс малой мощности может быть излучен, чтобы подтвердить, что устройство лазерного зажигания было снова установлено на цилиндр. Дополнительно к этому, указанный импульс малой мощности может быть обнаружен, и на основании времени, которое потребовалось для обнаружения импульса, может быть определено положение поршня в цилиндре и расстояние лазерного устройства от поршня, как это обсуждалось в отношении шага 312. На шаге 328, после получения сигнала переустановки, может быть произведена проверка того, лежит ли расстояние между поршнем и устройством лазерного зажигания цилиндра в ожидаемом интервале (например, в пределах пороговой дистанции). Если нет, то на шаге 330 можно констатировать, что устройство лазерного зажигания по-прежнему не установлено на цилиндр, и лазерное устройство может быть снова заблокировано. Алгоритм затем может вернуться к шагу 322 для новой оценки положения после получения следующего сигнала переустановки. Если расстояние лежит в пределах пороговой дистанции, то на шаге 332 может быть сделан вывод, что устройство лазерного зажигания было установлено обратно на цилиндр, и, соответственно, лазерное устройство может быть разблокировано (чтобы разрешить воспламенение смеси в цилиндре или определение положения поршня в цилиндре).
Согласно другим примерам, вместо ожидания следующего сигнала переустановки, устройство лазерного зажигания может быть временно разблокировано на выдачу импульсов малой мощности определенной длительности с момента получения (на шаге 322) первого сигнала переустановки, при этом устройство лазерного зажигания может быть разблокировано, как только будет определено, что расстояние до поршня лежит в пределах пороговой дистанции. И далее, согласно некоторым вариантам осуществления изобретения, можно потребовать, чтобы на всех цилиндрах было выполнено условие пороговой дистанции, чтобы можно было произвести разблокирование на высокую мощность лазерного устройства любого цилиндра после операции снятия устройства.
Таким образом, способ, представленный на фиг. 3, позволяет работать устройству лазерного зажигания, когда сделан вывод, что устройство находится на цилиндре, и позволяет блокировать работу устройства, когда сделан вывод, что устройство находится вне цилиндра. Посредством регулирования работы устройства или его выходной мощности на основе вывода о положении устройства относительно поршня цилиндра можно уменьшить вероятность травм и несчастных случаев, которые могут возникать из-за неквалифицированного обращения с лазером, когда лазер находится вне цилиндра.
На фиг. 4 изображена диаграмма 400, демонстрирующая пример блокирования устройства лазерного зажигания, связанного с цилиндром двигателя, в ответ на получение сигнала снятия устройства с цилиндра. Диаграмма 400 на графике 402 изображает работу двигателя (его включенное "on" и выключенное "off состояния); на графике 404 - уровень мощности лазера устройства лазерного зажигания; и на графике 406 - измеренное расстояние между устройством лазерного зажигания и поршнем. Как таковые, все графики изображают состояния для данного цилиндра двигателя.
Перед моментом t1 двигатель может работать и в цилиндрах может идти горение. В силу того, что перед моментом t1 действуют условия для воспламенения, устройство лазерного зажигания может приводиться в действие с уровнем высокой мощности для обеспечения энергии лазера, достаточной для воспламенения воздушно-топливной смеси в цилиндре. Во время действия условий для воспламенения, положение поршня, как таковое, не измеряется. Однако, если бы такое измерение проводилось, то положение поршня непрерывно бы изменялось в интервале между первым положением, при котором поршень находится в BDC, и вторым положением, при котором поршень находится в TDC (как показано штриховым участком 407). Следует понимать, что хотя штриховой участок показан в форме графика выпрямленного синусоидального колебания, в других примерах он может быть представлен графиком синусоидального колебания. В момент t1 двигатель может быть выключен. К примеру, могут быть подтверждены условия работы в режиме «стоп-пуск», и может быть отключена подача топлива и искры.
После момента t1, когда действуют условия, не требующие воспламенения, устройство лазерного зажигания может быть приведено в действие с пониженным уровнем мощности, обеспечивающим энергию лазера, достаточную для определения положения поршня и оценивания расстояния от поршня до устройства лазерного зажигания. Между моментами t1 и t2 измеренное расстояние может оставаться в интервале (или в пределах пороговой дистанции), который зависит от измеренных расстояний, когда поршень находится в BDC и TDC (см. верхний и нижний пределы, показанные штриховыми линиями).
В момент t2 техник сервисной организации может снять устройство лазерного зажигания с данного цилиндра для диагностики и испытаний. В результате этого, в момент t2 измеренное расстояние между устройством лазерного зажигания и поршнем цилиндра может оказаться за пределами интервала и превысить пороговую дистанцию. В ответ на то, что указанное расстояние превышает пороговую дистанцию, контроллер двигателя может сделать вывод, что устройство лазерного зажигания было снято, и может заблокировать устройство. То есть устройство может быть заблокировано, так что даже при поступлении команды на генерацию лазерного импульса никакого излучения лазерного импульса не произойдет.
В момент t3 техник сервисной организации может вернуть устройство лазерного зажигания на цилиндр и нажать кнопку переустановки. В ответ на сигнал переустановки от оператора устройство лазерного зажигания может быть на время приведено в действие в режиме пониженной энергии излучения коротких импульсов для подтверждения установки устройства лазерного зажигания на цилиндр. Между моментами t3 и t4 может состояться излучение короткого лазерного импульса, и после отражения от верхней поверхности поршня цилиндра этот импульс может быть обнаружен. Может быть проведено измерение расстояния между поршнем и устройством лазерного зажигания, и может быть определено, лежит ли это расстояние в пределах пороговой дистанции. В ответ на подтверждение того, что измеренное расстояние находится в пределах пороговой дистанции, в момент t4 может быть сделан вывод, что устройство лазерного зажигания было установлено на цилиндр, и что устройство может быть разблокировано для работы в режиме пониженной мощности.
После момента t4, когда условия для осуществления воспламенения отсутствуют, устройство лазерного зажигания может работать с пониженным уровнем мощности, обеспечивая энергию, достаточную для определения положения поршня в цилиндре. В момент t5 могут быть подтверждены условия перезапуска двигателя в зависимости от того, какой цилиндр будет первым, где будет инициировано воспламенение. Соответственно, в момент t5 устройство лазерного зажигания может быть снова переведено в режим высокой мощности. Кроме того, положение поршня может возобновить свое непрерывное изменение в интервале положений, когда поршень перемещается между BDC и TDC (как показано штриховым участком 408).
Таким образом, устройство лазерного зажигания системы лазерного зажигания двигателя может быть заблокировано, когда лазерное устройство снимают с двигателя. Благодаря возможности определения факта съема устройства с цилиндра на основе измерения расстояния между поршнем цилиндра двигателя и устройством лазерного зажигания, оптика системы лазерного зажигания, которая уже использовалась для определения положений элементов двигателя, может быть успешно использована для определения факта съема. Благодаря блокировке лазерного устройства, так что излучения лазерных импульсов вообще не происходит, даже когда поступает команда на формирование излучения, может быть уменьшена вероятность травм и несчастных случаев, вызванных ненадлежащим обращением с лазерным устройством высокой мощности вне цилиндра. Лазерное устройство может быть разблокировано только при установке устройства обратно на цилиндр. Таким образом, может быть обеспечен механизм защитной блокировки, в котором используются уже имеющиеся элементы системы лазерного зажигания.
Следует отметить, что приведенные в примере алгоритмы управления и измерения могут быть использованы с различными конструкциями двигателей и/или систем транспортных средств. Конкретные процедуры, приведенные в данном описании, могут представлять одну или более стратегий обработки, которые инициируются событием, прерыванием, являются многозадачными, многопотоковыми, и т.п. Как таковые, различные представленные действия, операции или функции можно выполнять в той последовательности, какая указана на схеме, можно выполнять параллельно или в некоторых случаях опускать. Аналогично, указанный порядок обработки не обязателен для решения вышеупомянутых задач изобретения, реализации отличительных признаков и преимуществ, но приведен в целях упрощения описания. Одно или более из представленных действий, операций и/или функций могут быть выполнены повторно в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять код, подлежащий занесению в виде программы в энергонезависимую считываемую среду хранения данных, в компьютер системы управления двигателем.
Следует понимать, что раскрытые в настоящем описании алгоритмы и конструкции по своей сути являются примерами, при этом конкретные варианты осуществления не следует рассматривать, как ограничивающие идею изобретения в виду возможности многочисленных вариантов и модификаций. Например, вышеописанная технология может быть применена в двигателях со схемами V-6, I-4, I-6, V-12, двигателях с 4 оппозитными цилиндрами и в двигателях иных типов. Предмет настоящего изобретения включает в себя весь объем новых и неочевидных комбинаций и сочетаний различных систем и конструкций, а также другие отличительные признаки, функции и/или свойства, раскрытые в настоящем описании.
Пункты нижеприведенной формулы изобретения конкретно указывают на определенные комбинации и подчиненные комбинации отличительных признаков, которые считаются новыми и неочевидными. Эти пункты могут относиться к «произвольному» элементу или «первому» элементу, или эквивалентному элементу. Следует понимать, что такие пункты содержат включение одного или более указанных элементов, не требуя при этом и не исключая двух или более таких элементов. Другие комбинации и подчиненные комбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу изобретения путем изменения пунктов настоящей формулы или путем представления новых пунктов формулы изобретения в рамках данной или родственной заявки. Такие пункты формулы изобретения также считаются включенными в предмет настоящего изобретения независимо от того, являются они более широкими, более узкими, равными или отличающимися в отношении границ идеи изобретения, установленных исходной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ ДЛЯ ЛАЗЕРНОГО ЗАЖИГАНИЯ И ИЗМЕРЕНИЯ | 2013 |
|
RU2628107C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2603443C2 |
| ДИАГНОСТИКА, ОСНОВАННАЯ НА ЛАЗЕРНОЙ СИСТЕМЕ ЗАЖИГАНИЯ | 2014 |
|
RU2668081C2 |
| ДИАГНОСТИКА, ОСНОВАННАЯ НА ЛАЗЕРНОЙ СИСТЕМЕ ЗАЖИГАНИЯ | 2014 |
|
RU2667837C2 |
| ДИАГНОСТИКА, ОСНОВАННАЯ НА ЛАЗЕРНОЙ СИСТЕМЕ ЗАЖИГАНИЯ | 2014 |
|
RU2667831C2 |
| ЛАЗЕРНОЕ ЗАЖИГАНИЕ И КОНТРОЛЬ ПРОПУСКОВ ЗАЖИГАНИЯ | 2013 |
|
RU2648993C2 |
| СИСТЕМА КОНТРОЛЯ СВЕЧИ ЗАЖИГАНИЯ (ВАРИАНТЫ) И СПОСОБ КОНТРОЛЯ | 2013 |
|
RU2577036C2 |
| СИСТЕМА ЛАЗЕРНОГО НАГРЕВА | 2012 |
|
RU2610528C2 |
| СПОСОБ ДИАГОНАЛЬНОЙ ПРОДУВКИ ЦИЛИНДРОВ ДВИГАТЕЛЯ ДЛЯ ВЫВЕДЕНИЯ ОТРАБОТАВШИХ ГАЗОВ (ВАРИАНТЫ) | 2015 |
|
RU2699866C2 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ПРЕЖДЕВРЕМЕННОГО ВОСПЛАМЕНЕНИЯ | 2016 |
|
RU2669101C2 |

Изобретение относится к способам и системам увеличения безопасности пользования лазерной системой зажигания. Технический результат заключается в обеспечении безопасности пользования при демонтаже лазерной системой зажигания. Предложены система и способ защитной блокировки для системы лазерного зажигания. Лазерное устройство может быть заблокировано при получении сигнала о том, что лазерное устройство было снято с цилиндра. Вывод о том, что устройство было снято, может быть основан на измеренном расстоянии между поршнем цилиндра и устройством лазерного зажигания. 3 н. и 16 з.п. ф-лы, 4 ил.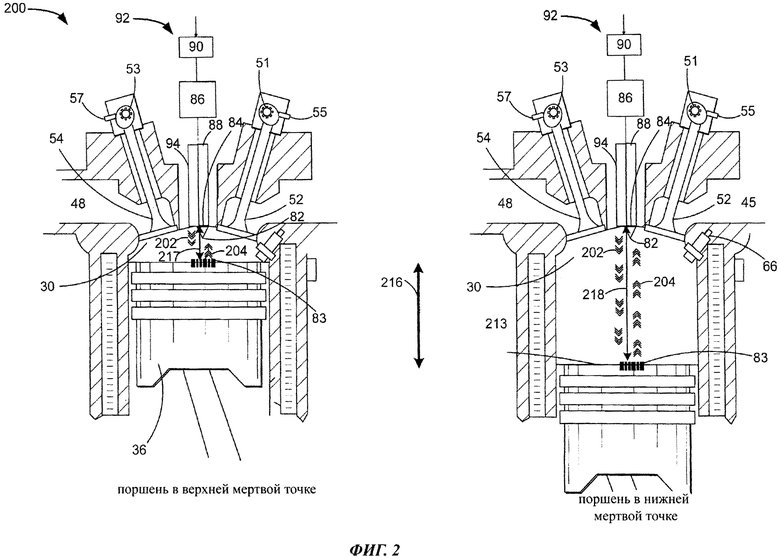
1. Способ управления работой устройства лазерного зажигания двигателя, содержащий:
работу устройства лазерного зажигания цилиндра в режиме пониженной мощности для определения предполагаемого расстояния между устройством лазерного зажигания и поршнем цилиндра; и
регулирование выходной мощности лазерных импульсов, излучаемых устройством лазерного зажигания в цилиндр, на основании данных предполагаемого расстояния относительно пороговой величины, основанной на длине цилиндра,
причем указанное регулирование выходной мощности включает в себя поддержание работы устройства лазерного зажигания в режиме пониженной мощности, когда указанное предполагаемое расстояние находится в пределах пороговой величины, и уменьшение выходной мощности указанных лазерных импульсов, когда указанное предполагаемое расстояние находится за пределами пороговой величины,
причем указанное уменьшение выходной мощности лазерных импульсов включает в себя блокирование устройства лазерного зажигания.
2. Способ по п. 1, отличающийся тем, что указанное регулирование работы включает в себя уменьшение выходной мощности лазерных импульсов в ответ на данные предполагаемого расстояния, указывающие на то, что устройство лазерного зажигания снято с цилиндра.
3. Способ по п. 1, отличающийся тем, что указанное предполагаемое расстояние определяют на основе времени, которое проходит между моментом излучения лазерного импульса устройством лазерного зажигания в цилиндр двигателя и моментом обнаружения лазерного импульса после его отражения от поршня.
4. Способ по п. 1, отличающийся тем, что пороговая величина дополнительно основана на расстоянии между устройством лазерного зажигания и поршнем, когда указанный поршень находится в нижней мертвой точке, и расстоянием, когда указанный поршень находится в верхней мертвой точке.
5. Способ по п. 1, отличающийся тем, что дополнительно содержит:
считывание штрих-кода, расположенного на верхней поверхности поршня, и индикацию того, что устройство лазерного зажигания снято с цилиндра.
6. Способ по п. 1, отличающийся тем, что дополнительно содержит:
работу устройства лазерного зажигания цилиндра в режиме повышенной мощности для инициирования воспламенения в цилиндре в ответ на то, что данные предполагаемого расстояния для всех цилиндров двигателя находятся в пределах пороговой величины.
7. Способ управления работой устройства лазерного зажигания двигателя, содержащий:
приведение устройства лазерного зажигания цилиндра в действие для измерения расстояния между устройством лазерного зажигания и поршнем цилиндра; и
блокирование устройства лазерного зажигания в ответ на факт превышения измеренным расстоянием пороговой величины.
8. Способ по п. 7, отличающийся тем, что указанная пороговая величина основана на значении длины цилиндра.
9. Способ по п. 8, отличающийся тем, что блокирование устройства лазерного зажигания заключается в блокировании лазерного излучателя устройства.
10. Способ по п. 9, отличающийся тем, что приведение устройства лазерного зажигания в действие для измерения расстояния включает в себя его применение на пониженной мощности, при этом устройство лазерного зажигания применяют на повышенной мощности, когда указанное устройство используют для воспламенения воздушно-топливной смеси в цилиндре.
11. Способ по п. 10, отличающийся тем, что указанное приведение устройства лазерного зажигания в действие включает в себя его использование перед первым актом воспламенения после состояния покоя.
12. Способ по п. 7, отличающийся тем, что приведение устройства лазерного зажигания в действие для измерения расстояния включает в себя:
излучение лазерного импульса малой мощности от устройства в полость цилиндра,
причем указанный лазерный импульс отражается от поршня;
обнаружение отраженного лазерного импульса; и
оценивание расстояния на основе времени, прошедшего между моментами излучения и обнаружения.
13. Способ по п. 12, отличающийся тем, что указанная пороговая величина основана на значении времени, прошедшего с момента нахождения поршня в нижней мертвой точке.
14. Способ по п. 13, отличающийся тем, что дополнительно содержит получение сигнала снятия устройства лазерного зажигания с цилиндра, в ответ на факт превышения измеренным расстоянием пороговой величины.
15. Способ по п. 14, отличающийся тем, что верхняя поверхность поршня содержит штрих-код, при этом способ дополнительно содержит считывание штрих-кода для идентификации цилиндра, с которого снято устройство лазерного зажигания.
16. Способ управления работой устройства лазерного зажигания двигателя, содержащий:
блокирование устройства лазерного зажигания, связанного с цилиндром двигателя, в ответ на получение сигнала снятия устройства с цилиндра, причем указанный сигнал заключается в том, что измеренное расстояние между поршнем цилиндра и устройством лазерного зажигания превышает пороговую величину.
17. Способ по п. 16, отличающийся тем, что блокирование устройства лазерного зажигания заключается в том, что при получении команды на излучение лазерного импульса никакого излучения не происходит.
18. Способ по п. 16, отличающийся тем, что блокирование устройства лазерного зажигания осуществляют путем аппаратного и/или программного регулирования.
19. Способ по п. 16, отличающийся тем, что дополнительно содержит: поддержание устройства лазерного зажигания в заблокированном состоянии, пока не будет получен сигнал установки устройства на цилиндр; и разблокирование устройства лазерного зажигания.
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ С НЕСКОЛЬКИМИ ЗАЛЕЖАМИ, РАСПОЛОЖЕННЫМИ ДРУГ НАД ДРУГОМ | 2010 |
|
RU2441145C1 |
| US 7322338 B1, 2008-01-29 | |||
| US 2004168662 A1, 2004-09-02 | |||
| EP 1192354 A1, 2002-04-03 | |||
| US 2010292906 A1, 2010-11-18 | |||
| СПОСОБ ВОСПЛАМЕНЕНИЯ ТОПЛИВНОЙ СМЕСИ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ ЛАЗЕРНЫМ ОПТИЧЕСКИМ РАЗРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436991C1 |

