ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка относится к способам и системам для диагностирования двигателя с использованием компонентов лазерной системы зажигания.
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Компоненты системы двигателя (такие как цилиндры, клапаны, поршни, форсунки и т.д.) могут периодически диагностироваться на повреждение, понесенное во время работы двигателя. Компоненты также могут диагностироваться для идентификации ухудшенных функциональных возможностей (например, неправильного потока, утечки и т.д.). Диагностика может включать в себя визуальный контроль компонентов на повреждение задирами, такой как снятие свечи зажигания и получение обзора отверстия цилиндра для осмотра внутренности цилиндра. В еще одном подходе, описанном Ялином и другими в US 2006/0037572, свет от события искрового зажигания в цилиндре и/или пламени сгорания используется для диагностирования на присутствие скоплений и загрязнений в цилиндре.
Изобретатели в материалах настоящей заявки осознали, что обсужденные выше подходы могут добавлять большое время, затраты и сложность к диагностике. В частности, большая часть вышеприведенных подходов требует квалифицированных технических специалистов, сложных средств диагностики, специализированного лабораторного оборудования и отнимающей много времени разборки двигателя. Ввиду этих проблем, изобретатели осознали, что, в системах двигателя, сконфигурированных возможностями лазерного зажигания, компоненты лазерной системы зажигания могут преимущественно использоваться для диагностирования различных компонентов системы двигателя. В одном из примеров, двигатель может диагностироваться посредством способа, содержащего: инициацию сгорания в цилиндре посредством приведения в действие лазерного устройства зажигания; формирование изображения внутри цилиндра после приведения в действие лазерного устройства зажигания с использованием света, вырабатываемого с помощью сгорания в цилиндре; и отображение сформированного изображения оператору (например, специалисту по обслуживанию) на устройстве отображения транспортного средства. Оператор затем может указывать ухудшение характеристик компонента цилиндра (например, днища поршня, линзы фотодетектора и т.д.) или характеристики сгорания в цилиндре (например, распространения пламени, зарождения пламени и т.д.) на основании отображенного изображения. Таким образом, диагностика цилиндра двигателя может ускоряться и упрощаться, не делая необходимой разборку двигателя.
Например, оптика лазерной системы зажигания может использоваться для диагностирования цилиндра во время события сгорания. В частности, световые импульсы высокой мощности могут испускаться лазерным устройством зажигания в цилиндр (например, во время такта сжатия), чтобы инициировать сгорание в цилиндре. Изображения внутри цилиндра, в таком случае, могут захватываться системой фотодетектирования, присоединенной к головке цилиндра, с использованием света, сформированного от события сгорания в цилиндре. Система фотодетектирования может включать в себя камеру (такую как ПЗС-камера) и линзу (такой как линза типа «рыбий глаз») для детектирования лазерных импульсов. В одном из примеров, световые импульсы могут испускаться в инфракрасном (ИК, IR) спектре лазерным устройством зажигания и детектироваться в ИК-спектре камерой. Изображения состояния внутренней части цилиндра во время сгорания, в таком случае, могут формироваться на основании детектированных импульсов. Изображения, например, могут быть указывающими состояние днища поршня, конфигурацию распространения пламени, место зарождения пламени, конфигурацию зарождения пламени, временные характеристики пика сгорания и т.д., и могут использоваться для логического вывода ухудшения характеристик. Изображения могут передаваться (например, беспроводным образом) в пределах системы двигателя и отображаться поставщику услуг (например, механику или оператору транспортного средства) на дисплее центральной консоли транспортного средства. В дополнение, опорное изображение диагностируемого компонента/состояния цилиндра может извлекаться из памяти контроллера и отображаться механику для сравнительного анализа.
Например, когда сформированное изображение является указывающим состояние днища поршня, отображаемое опорное изображение может быть указывающим ожидаемое состояние днища поршня. Расхождение между изображениями затем может использоваться для диагностирования днища поршня (например, идентификации оплавления днища поршня). В качестве еще одного примера, когда сформированное изображение является указывающим место зарождения пламени, отображаемое опорное изображение может быть указывающим ожидаемое место зарождения пламени. Расхождение между изображениями, в таком случае, может использоваться для диагностирования собирающей линзы системы фотодетектирования. По выбору, если двигатель присоединен в транспортном средстве с гибридным электрическим приводом, электродвигатель может эксплуатироваться во время работы двигателя, чтобы поддерживать условия числа оборотов-нагрузки на опорных числе оборотов-нагрузке, в то время как формируются изображения внутри цилиндра. Если механик определяет, что сформированное изображение является в достаточной мере отличным от опорного изображения, механик может определять, что есть ухудшение характеристик компонента, и может указывать то же самое контроллеру через устройство отображения. Соответственно, в контроллере двигателя может устанавливаться диагностический код.
Таким образом, может быть возможным использовать преимущества лазерной системы зажигания для сокращения времени и затрат, ассоциативно связанных с визуальным контролем двигателя, не снижая тщательности контроля. Посредством сравнения изображений цилиндра, собранных фотодетектором вслед за сгоранием в цилиндре, могут диагностироваться различные компоненты и условия цилиндра. Диагностические изображения могут отображаться механику наряду с опорными изображениями для сравнения, так чтобы механик мог идентифицировать ухудшение характеристик компонента цилиндра. Посредством использования оборудования, уже имеющегося в распоряжении в двигателе, сконфигурированном лазерной системой зажигания, необходимость в дорогостоящем, трудоемком и отнимающем много времени визуальном контроле может снижаться. В общем и целом, может упрощаться контроль двигателя без снижения тщательности контроля.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает примерную камеру сгорания двигателя внутреннего сгорания, присоединенного в системе транспортного средства с гибридным приводом.
Фиг. 2 показывает примерные захват и отображение изображения с использованием лазерной системы двигателя по фиг. 1.
Фиг. 3A-B показывают пример испускания импульса лазерного излучения в цилиндр двигателя.
Фиг. 4 показывает примерный четырехцилиндровый двигатель, остановленный в произвольном положении в своем ездовом цикле.
Фиг. 5 показывает два рабочих режима системы лазерного зажигания двигателя, используемой для идентификации положений поршня и впускного клапана цилиндра во время цикла двигателя.
Фиг. 6 показывает высокоуровневую блок-схему последовательности операций способа для диагностирования ухудшения характеристик одного или более компонентов цилиндра на основании изображений внутри цилиндра, сформированных фотоприемником во время такта впуска.
Фиг. 7 показывает высокоуровневую блок-схему последовательности операций способа для диагностирования ухудшения характеристик одного или более компонентов цилиндра на основании изображений внутри цилиндра, сформированных фотодетектором с использованием света от события сгорания в цилиндре.
Фиг. 8 показывает высокоуровневую блок-схему последовательности операций способа для диагностирования ухудшения характеристик одного или более компонентов двигателя на основании измерений положения поршня и положения впускного клапана, выполненных с использованием лазерной системы зажигания двигателя.
Фиг. 9-10 показывают примерное диагностирование конфигурации факела распыла топливной форсунки.
Фиг. 11-13 показывают примерные процедуры для диагностирования ухудшения характеристик различных компонентов двигателя согласно настоящему раскрытию.
ПОДРОБНОЕ ОПИСАНИЕ
Предусмотрены способы и системы для диагностирования одного или более компонентов цилиндра двигателя с использованием лазерной системы зажигания, такой как показанная на фиг. 1. Как показано на фиг. 2-3, испускание импульса лазерного излучения на более низких интенсивностях может использоваться для освещения внутренней части цилиндра, в то время как фотодетектор захватывает изображения внутри цилиндра. Испускание импульса лазерного излучения на более высоких интенсивностях также может использоваться для инициирования сгорания наряду с тем, что свет, вырабатываемый во время сгорания, используется фотодетектором для захвата изображений внутренней части цилиндра. Сформированные изображения могут использоваться для диагностирования различных компонентов внутри цилиндра и параметров сгорания в цилиндре. Кроме того еще, определение положения кулачков и поршня может точно выполняться с использованием испускания импульса лазерного излучения, как показано на фиг. 4-5, предоставляя возможность для диагностирования распределительных валов и коленчатых валов двигателя, как обсуждено на фиг. 8. Контроллер двигателя может быть выполнен с возможностью выполнять процедуру управления, такую как процедура по фиг. 6, чтобы диагностировать ухудшение характеристик одного или более компонентов цилиндра на основании изображений внутри цилиндра, сформированных фотодетектором во время такта впуска с использованием света от испускания лазерного импульса. Контроллер также может выполнять процедуру управления, такую как процедура по фиг. 7, чтобы диагностировать ухудшение характеристик компонентов цилиндра на основании изображений внутри цилиндра, сформированных фотодетектором с использованием света, вырабатываемого во время события сгорания в цилиндре. Примерные способы диагностики для выбранных компонентов двигателя конкретизированы на фиг. 9-13.
С обращением к фиг. 1, изображена примерная гибридная силовая установка 10. Гибридная силовая установка может быть сконфигурирована в пассажирском дорожном транспортном средстве. Система 10 гибридной силовой установки включает в себя двигатель 20 внутреннего сгорания. Двигатель может быть присоединен к трансмиссии (не показана), такой как ручная трансмиссия, автоматическая трансмиссия или их комбинация. Кроме того, могут быть включены в состав различные дополнительные компоненты, такие как гидротрансформатор, и/или другие зубчатые передачи, такие как звено главной передачи и т.д. Гибридная силовая установка также включает в себя устройство преобразования энергии (не показано), которое может включать в себя электродвигатель, генератор, среди прочего, и их комбинации. Устройство преобразования энергии может приводиться в действие, чтобы поглощать энергию от движения транспортного средства и/или двигателя и преобразовывать поглощенную энергию в форму энергии, пригодную для хранения в устройстве накопления энергии. Устройство преобразования энергии также может приводиться в действие, чтобы подводить отдаваемую мощность (энергию, работу крутящий момент, частоту вращения и т.д.) на двигатель, с тем, чтобы дополнять отдаваемую мощность двигателя. Должно быть принято во внимание, что устройство преобразования энергии, в некоторых вариантах осуществления, может включать в себя электродвигатель, генератор или оба, электродвигатель и генератор, в числе различных других компонентов, используемых для обеспечения надлежащего преобразования энергии между устройством накопления энергии и ведущими колесами и/или двигателем транспортного средства.
Двигатель 20 может быть многоцилиндровым двигателем внутреннего сгорания, один из цилиндров которого подробно изображен на фиг. 1. Двигатель 20 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от оператора 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали.
Цилиндр 30 сгорания двигателя 20 может включать в себя стенки 32 цилиндра сгорания с поршнем 36, расположенным в них. Поршень 36 может быть присоединен к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу силовой установки 10 через промежуточную систему трансмиссии. Цилиндр 30 сгорания может принимать всасываемый воздух из впускного коллектора 45 через впускной канал 43 и могут выпускать газообразные продукты сгорания отработавших газов через выпускной канал 48. Впускной коллектор 45 и выпускной канал 48 могут избирательно сообщаться с цилиндром 30 сгорания через соответственные впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления, цилиндр 30 сгорания может включать в себя два или более впускных клапана и/или два или более выпускных клапана.
Двигатель 20 по выбору может включать в себя датчики 55 и 57 положения кулачков. Однако, в показанном примере, впускной клапан 52 и выпускной клапан 54 могут управляться посредством приведения в действие кулачков через соответственные системы 51 и 53 кулачкового привода. Каждая из систем 51 и 53 кулачкового привода может включать в себя один или более кулачков и может использовать одну или более из систем переключения профиля кулачков (CPS), регулируемой установки фаз кулачкового распределения (VCT), регулируемой установки фаз клапанного распределения (VVT) и/или регулируемого подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапанов. Чтобы давать возможность выявления положения кулачков, системы 51 и 53 кулачкового привода могут иметь зубчатые колеса. Положение впускного клапана 52 и выпускного клапана 54 может определяться датчиками 55 и 57 положения, соответственно. В альтернативных вариантах осуществления, впускной клапан 52 и/или выпускной клапан 54 могут управляться посредством возбуждения клапанного распределителя с электромагнитным управлением. Например, цилиндр 30, в качестве альтернативы, может включать в себя впускной клапан, управляемый посредством приведения в действие клапанного распределителя с электромагнитным управлением, и выпускной клапан, управляемый через кулачковый привод, включающий в себя системы CPS и/или VCT.
Топливная форсунка 66 показана присоединенной непосредственно к цилиндру 30 сгорания для впрыска топлива непосредственно в него пропорционально длительности импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно в качестве непосредственного впрыска топлива в цилиндр 30 сгорания. Топливная форсунка, например, может быть установлена сбоку цилиндра сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель топлива. В некоторых вариантах осуществления, цилиндр 30 сгорания, в качестве альтернативы или дополнительно, может включать в себя топливную форсунку, скомпонованную во впускном канале 43, в конфигурации, которая обеспечивает то, что известно как впрыск топлива во впускное окно, выше по потоку от цилиндра 30 сгорания.
Впускной канал 43 может включать в себя клапан 74 управления движением заряда (CMCV) и заслонку 72 CMCV, и также может включать в себя дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере, положение дроссельной заслонки 64 может регулироваться контроллером 12 посредством сигналов, выдаваемых на электродвигатель или исполнительный механизм, включенный дросселем 62, конфигурацией, которая может указываться ссылкой как электронный регулятор дросселя (ETC). Таким образом, дроссель 62 может приводиться в действие, чтобы регулировать всасываемый воздух, выдаваемый в цилиндр 30 сгорания, среди других цилиндров сгорания двигателя. Впускной канал 43 может включать в себя датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для выдачи соответственных сигналов MAF и MAP в контроллер 12.
Датчик 126 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от каталитического нейтрализатора 70 отработавших газов. Датчик 126 может быть любым подходящим датчиком для выдачи показания топливо/воздушного соотношения в отработавших газах, таким как линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или EGO, HEGO (подогреваемый EGO), датчик содержания NOx, HC, или CO. Система выпуска может включать в себя розжиговые каталитические нейтрализаторы и каталитические нейтрализаторы низа кузова, а также выпускной коллектор, расположенные выше по потоку и/или ниже по потоку датчики топливо-воздушного соотношения. Каталитический нейтрализатор 70 отработавших газов может включать в себя многочисленные блоки нейтрализатора в одном из примеров. В еще одном примере, могут использоваться многочисленные устройства снижения токсичности выбросов, каждое с многочисленными брикетами. Каталитический нейтрализатор 70 отработавших газов, в одном из примеров, может быть каталитическим нейтрализатором трехкомпонентного типа.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, дежурную память 109 и шину данных. Контроллер 12 может принимать различные сигналы и информацию с датчиков, присоединенных к двигателю 20, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; в некоторых примерах, сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40, может быть по выбору включен в состав; положение дросселя (TP) с датчика положения дросселя; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122. Датчик 118 на эффекте Холла по выбору может быть включен в двигатель 20, так как он действует в рабочем объеме, подобном лазерной системе двигателя, описанной в материалах настоящей заявки. Постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими собой команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также их вариантов.
Лазерная система 92 включает в себя задающий генератор 88 лазерного излучения и блок 90 управления лазером (LCU). LCU 90 побуждает задающий генератор 88 лазерного излучения вырабатывать энергию лазерного излучения. LCU 90 может принимать операционные команды из контроллера 12. Задающий генератор 88 лазерного излучения включает в себя часть 86 лазерной накачки и часть 84 сведения излучения. Часть 84 сведения излучения сводит лазерное излучение, выработанное частью 86 накачки лазера, в фокусной точке 82 лазера цилиндра 30 сгорания. В одном из примеров, часть 84 сведения излучения может включать в себя одну или более линз.
Фотодетектор 94 может быть расположен в верхней части цилиндра 30 в качестве части лазерной системы 92 и может принимать обратные импульсы от верхней поверхности поршня 36. Фотодетектор 94 может включать в себя камеру с линзой. В одном из примеров, камера является прибором с зарядовой связью (ПЗС, CCD). ПЗС-камера может быть выполнена с возможностью детектировать и считывать лазерные импульсы, испущенные посредством LCU 90. В одном из примеров, когда LCU испускает лазерные импульсы в инфракрасном частотном диапазоне, ПЗС-камера может функционировать и принимать импульсы в инфракрасном частотном диапазоне. В таком варианте осуществления, камера также может указываться ссылкой как передающая тепловизионная камера. В других вариантах осуществления, камера может быть ПЗС-камерой полного спектра, которая способна к функционированию в видимом спектре, а также инфракрасном спектре. Камера может включать в себя линзу для фокусирования детектированных лазерных импульсов и формирования изображения внутренней части цилиндра. В одном из примеров, линза является линзой типа «рыбий глаз», которая создает панорамное или полусферическое изображение внутренности цилиндра. После испускания лазера из LCU 90, лазер осуществляет развертку в пределах внутренней области цилиндра 30 на фокальном пятне 82 лазера. Световая энергия, которая отражается от поршня 36, может детектироваться камерой в фотодетекторе 94. Фотодетектор 94 также может захватывать изображения внутренней части цилиндра, как конкретизировано ниже.
Лазерная система 92 выполнена с возможностью работать в большем, чем один рабочий объем, с синхронизацией каждой операции на основании положения двигателя по четырехтактному циклу сгорания. Например, энергия лазерного излучения может использоваться для воспламенения топливо/воздушной смеси во время рабочего такта двигателя, в том числе, во время проворачивания коленчатого вала двигателя, операции прогрева двигателя и работы прогретого двигателя. Топливо, впрыскиваемое топливной форсункой 66, может формировать топливо/воздушную смесь во время по меньшей мере части такта впуска, где воспламенение топливо/воздушной смеси энергией лазерного излучения, вырабатываемой задающим генератором 88 лазерного излучения, начинает сгорание негорючей в ином случае топливо/воздушной смеси и вытесняет поршень 36 вниз. Более того, свет, вырабатываемый во время события сгорания в цилиндре, может использоваться фотодетектором 94 для захвата изображений внутренней части цилиндра. Как конкретизировано на фиг. 9, сформированные изображения затем могут использоваться для диагностирования различных компонентов внутри цилиндра, а также параметров сгорания в цилиндре.
При второй работоспособности, LCU 90 может подавать импульсы с низкой мощностью в цилиндр. Импульсы с низкой мощностью могут использоваться для определения положения поршня и клапана во время четырехтактного цикла сгорания, как обсуждено на фиг. 4-7. Измерения положения поршня и положения клапана затем могут использоваться для диагностирования компонентов цилиндра, таких как распределительные валы и коленчатые валы, как обсуждено на фиг. 10. В дополнение, по возобновлению работы двигателя из условий выключения холостого хода, энергия лазерного излучения может использоваться для контроля положения, скорости и т.д., двигателя, для того чтобы синхронизировать подачу топлива и установку фаз клапанного распределения. Более того, свет, вырабатываемый посредством испускания импульса лазерного излучения на более низкой мощности, может использоваться для захвата изображений внутренней части цилиндра до того, как происходит событие сгорания в цилиндре, к примеру, во время такта впуска. Изображения также могут формироваться во время условий без сгорания, таких как при работе в специфичных диагностических режимах. Как конкретизировано на фиг. 8, сформированные изображения затем могут использоваться для диагностирования различных компонентов внутри цилиндра.
Изображения, сформированные на фотодетекторе 94, могут отображаться механику или специалисту по обслуживанию на центральной консоли транспортного средства, так чтобы он мог выполнять визуальный контроль и идентифицировать любое ухудшение характеристик компонентов цилиндра. Например, лазерное устройство зажигания, присоединенное к фотодетектору 94, может передавать световые импульсы в цилиндр 30 наряду с тем, что фотодетектор 94, включающий в себя инфракрасную камеру, оборудованную линзой типа рыбий глаз, формирует изображения, которые беспроводным образом передаются в контроллер двигателя и просматриваются на устройстве отображения транспортного средства. В некоторых примерах, как обсуждено со ссылкой на фиг. 2, во время эксплуатации лазерного устройства зажигания, управляемая оператором ручка на центральной консоли может настраивать положение двигателя. Эти настройки включают в себя проворачивание двигателя вперед или назад от исходного положения двигателя, предоставляя возможность для дополнительного обследования цилиндра для указания ухудшения характеристик.
LCU 90 может управлять задающим генератором 88 лазерного излучения, чтобы фокусировать энергию лазерного излучения в разных местоположениях в зависимости от условий эксплуатации. Например, энергия лазерного излучения может фокусироваться в первом местоположении в стороне от стенки 32 цилиндра в пределах внутренней области цилиндра 30, для того чтобы воспламенять топливо/воздушную смесь. В одном из вариантов осуществления, первое местоположение может находиться возле верхней мертвой точки (ВМТ, TDC) рабочего такта. Кроме того, LCU 90 может направлять задающий генератор 88 лазерного излучения, чтобы вырабатывать первое множество импульсов лазерного излучения, направленных в первое местоположение, и первое сгорание от состояния покоя может принимать энергию лазерного излучения из задающего генератора 88 лазерного излучения, которая является большей, чем энергия лазерного излучения, выдаваемая в первое местоположение для более поздних сгораний. В качестве еще одного примера, энергия лазерного излучения может фокусироваться во втором местоположении около стенки цилиндра, ближайшей к впускному окну цилиндра, для того чтобы диагностировать конфигурацию факела распыла форсунки или конфигурацию потока всасываемого воздуха.
Контроллер 12 управляет LCU 90 и имеет несъемный машинно-читаемый запоминающий носитель, включающий в себя машинную программу для настройки местоположения подачи энергии лазерного излучения на основании температуры, например, ECT. Энергия лазерного излучения может направляться в разные местоположения внутри цилиндра 30. Контроллер 12 также может заключать в себе дополнительные или альтернативные датчики для определения рабочего режима двигателя 20, в том числе, дополнительные датчики температуры, датчики давления, датчики крутящего момента, а также датчики, которые выявляют частоту вращения двигателя, количество воздуха и величину впрыска топлива. Дополнительно или в качестве альтернативы, LCU 90 может поддерживать прямую связь с различными датчикам, такими как датчики температуры для выявления ECT, для определения рабочего режима двигателя 20.
Как описано выше, фиг. 1 показывает один цилиндр многоцилиндрового двигателя 20, и каждый цилиндр может подобным образом включать в себя свой собственный набор впускных/выпускных клапанов, топливную форсунку, лазерную систему зажигания и т.д.
Фиг. 2 иллюстрирует примерный вариант 200 осуществления того, каким образом лазерная система 92 (по фиг. 1) может испускать лазерные импульсы в цилиндр 30, так чтобы фотодетектор лазерной системы мог захватывать изображения внутренней части цилиндра. Изображения могут отображаться оператору транспортного средства, чтобы давать возможность визуального контроля цилиндра касательно повреждения. По существу, компоненты, уже представленные на фиг. 1, на фиг. 2 повторно не представляются.
Фиг. 2 показывает лазерной системы 92, которая включает в себя задающий генератор 88 лазерного излучения, фотодетектор 94 и LCU 90. LCU 90 побуждает задающий генератор 88 лазерного излучения вырабатывать энергию лазерного излучения. Высокочастотные лазерные импульсы направляются в различные местоположения цилиндра, чтобы сканировать как можно большую часть цилиндра. Например, лазерные импульсы 202 могут направляться на стенки 215 цилиндра, внутреннюю часть цилиндра 30, верхнюю поверхность 213 поршня и внутреннюю поверхность клапанов 52 и 54 (то есть, поверхность, обращенную в цилиндр). Посредством сканирования как можно большей части цилиндра как можно быстрее, лазерный импульс 202 действует как источник света с широким пучком или допускающий электролампу фотодетектор 94 (в частности, ПЗС-камера) для захвата изображений 220 внутренней части цилиндра. Посуществу, при работе в качестве источника света для захвата изображений во время диагностики, лазерная система зажигания (или лазерное устройство) может считаться работающей в режиме проектора или осветителя, и LCU 90 может принимать рабочие команды, такие как режим мощности, из контроллера 12. При эксплуатации в выбранных диагностических режимах, лазерная система 92 испускает последовательность импульсов низкой мощности на высокой частоте. В сравнение, во время воспламенения, используемый лазер может подвергаться быстрой пульсации с высокой энергоемкостью, чтобы воспламенять топливо/воздушную смесь. В одном из примеров, во время диагностического режима, лазер может подвергаться пульсации на низком уровне энергии с частотной модуляцией, имеющей периодически повторяющееся линейное изменение частоты Частые лазерные импульсы низкой мощности могут испускаться в инфракрасном спектре. Система фотодетектирования, которая включает в себя ПЗС-камеру, работающую в инфракрасном спектре (например, инфракрасную ПЗС-камеру) с линзой типа «рыбий глаз», может быть расположена в верхней части цилиндра в качестве части лазера и может захватывать изображения 320 цилиндра с использованием световой энергии, отраженной от внутренней части цилиндра. Захваченные изображения могут включать в себя изображения стенок 215 цилиндра, обращенной в цилиндр поверхности впускного и выпускного клапанов 52 и 54, верхней поверхности 213 поршня и внутренней части цилиндра 30. Захваченные изображения 220 передаются беспроводным образом фотодетектором 94 в контроллер для просмотра на дисплее 135 в центральной консоли 140 транспортного средства.
Центральная консоль 140 может быть включена в приборную панель транспортного средства внутри кабины транспортного средства гибридной силовой установки 10 по фиг. 1. Центральная консоль 140 может быть несущей элементы управления поверхностью, расположенной в центральной части кабины транспортного средства, в частности, в передней части кабины транспортного средства. Центральная консоль 140 может включать в себя различные элементы управления, такие как ручки 138, циферблаты 142 и кнопки 136. Различные элементы управления могут приводиться в действие оператором транспортного средства для настройки условий в кабине. Различные элементы управления, например, могут включать в себя ручку 138 регулирования уровня громкости, присоединенную к музыкальной системе транспортного средства, для настройки уровня громкости музыки в кабине, кнопку 136 настройки, присоединенную к системе радиоприемника транспортного средства, для настройки выбора радиоканала, и циферблат 142 регулирования температуры, присоединенный к системе HVAC транспортного средства, для настройки температур отопления и охлаждения кабины.
Центральная консоль 140 также может включать в себя дисплей 135. Дисплей может быть сенсорным дисплеем, который дает оператору транспортного средства возможность выбирать регулировки транспортного средства посредством сенсорных взаимодействий. Дисплей также может использоваться для отображения текущих регулировок транспортного средства. В дополнение, дисплей может использоваться для отображения навигационной системы, такой как GPS, телефонных возможностей или интернет-приложений, к которым должен быть осуществлен доступ во время поездки. Во время условий, когда лазерное устройство зажигания эксплуатируется, чтобы захватывать изображения для диагностических целей, устройство 135 отображения используется, чтобы показывать изображения внутренности цилиндра 30, которые захвачены фотодетектором 94, присоединенным к лазерной системе 92 зажигания. Более точно, изображения внутренней части цилиндра, полученные ПЗС-камеры лазерной системой детектирования, передаются, например, беспроводным образом, в систему управления двигателем и отображаются на дисплее 135 оператору транспортного средства (например, механику). На основании предпочтения отображения оператора, выбранного посредством сенсорных взаимодействий на дисплее, могут отображаться изображения внутренней части цилиндра любого или всех цилиндров.
В некоторых примерах, во время диагностического режима, одна или более из ручек 138 могут вводиться в действие для управления положением двигателя (и выводиться из работы для управления кабиной). Например, при эксплуатации в диагностическом режиме, ручка регулирования уровня громкости может вводиться в действие для управления положением двигателя и выводиться из работы для регулирования уровня громкости. Следовательно, настройки в отношении ручки 138 регулирования уровня громкости могут использоваться для настройки положения двигателя из исходного положения двигателя, чтобы содействовать визуальному контролю цилиндра. Например, может определяться, что поршень цилиндра расположен в или возле верхней части цилиндра, отображаемый на данный момент на дисплее 135, заграждая полный обзор внутренней части цилиндра. Для улучшения обзора, оператор транспортного средства может медленно поворачивать ручку регулирования уровня громкости (например, по часовой стрелке или против часовой стрелки), которая, в свою очередь, перемещает положение двигателя (например, вперед или назад), из условия чтобы поршень медленно перемещался в направлении дна цилиндра, посредством настроек генератора/электродвигателя разделения мощности системы двигателя. В вариантах осуществления, где двигатель включает в себя трансмиссию с планетарной передачей, электродвигатель может удерживать наружное кольцо неподвижным (что поддерживает неподвижными колеса с шинами) наряду с тем, что генератор (или солнечная шестерня), вращает двигатель с использованием обратной связи с кругового датчика положения генератора или с использованием колеса кривошипа 60-2 с системой позиционирования на датчике Холла для действующей обратной связи по положению двигателя. Это перемещение поршня может предоставлять оператору возможность принимать изображения, представляющие более полный обзор внутренней части цилиндра, и давать ему возможность осуществлять более точный контроль. Например, улучшенный обзор может давать оператору возможность контролировать стенки цилиндра на повреждения задирами. Кроме того, во время диагностического режима, та же самая ручка регулирования уровня громкости или альтернативная ручка центральной консоли, циферблат или кнопка могут вводиться в действие, чтобы давать изображению цилиндра, отображаемому на дисплее 135 возможность увеличиваться (например, даваться крупным планом или мелким планом).
В одном из примеров, световые импульсы низкой мощности могут испускаться в инфракрасном (ИК) спектре лазерным устройством зажигания, а ПЗС-камера может быть выполнена с возможностью работать в ИК-спектре. В альтернативных вариантах осуществления, фотодетектор 94 может иметь ПЗС-камеру полного спектра, которая может подстраиваться скоординированно с частотой лазера; таким образом, камера может работать в ИК и других спектрах светового излучения (например, дневного света или электроламп) и обладает способностью выводить из работы лазер, если обнаружено световое излучение не ИК-спектра. При наблюдении изображений, оператор транспортного средства (например, специалист по обслуживанию или механик) может активно производить настройки в отношении положения поршня, для того чтобы лучше просматривать цилиндр. Например, во время условий, где изображения 220 указывают, что поршень находится возле верха цилиндра (например, в ВМТ), дополнительные настройки предоставляют возможность, чтобы двигатель подстраивался медленно и точно, для того чтобы перемещать поршень вниз до дна цилиндра. В изображенном примере, когда поршень находится около верха цилиндра в пределах видимости, оператор может настраивать ручку 138 регулирования уровня громкости, расположенную на центральной консоли 140 транспортного средства, для того чтобы проворачивать двигатель вперед или назад из исходного положения двигателя. Если двигатель проворачивается назад из исходного положения двигателя, чтобы перемещать поршень вниз, контроллер может одновременно открывать впускной дроссель двигателя для снижения давления впускного коллектора.
Фиг. 3A-B показывают примерную работу лазерной системы 92. LCU 90 побуждает задающий генератор 88 лазерного излучения вырабатывать лазерный импульс низкой энергии, показанный под 302, который может направляться в направлении верхней поверхности 313 поршня 36. После испускания, световая энергия может отражаться от поршня и детектироваться фотодетектором 94. LCU 90 может принимать операционные команды, такие как режим мощности, из контроллера 12. Например, во время воспламенения, используемый лазерный импульс может подвергаться быстрой пульсации с высокой энергоемкостью, чтобы воспламенять топливо/воздушную смесь. Наоборот, для определения положения двигателя, контроллер может управлять лазерной системой, чтобы раскачивать частоту с низкой энергоемкостью, чтобы определять положение поршня и идентифицировать одно или более положений клапана. Например, частотная модуляция лазера с периодически повторяющимся линейным изменением частоты может предоставлять возможность определения одного или более положений поршня в двигателе. Датчик 94 обнаружения может быть расположен в верхней части цилиндра в качестве части лазерной системы и может быть калиброван, чтобы принимать обратный импульс 304, отраженный от верхней поверхности 313 поршня 36.
Фиг. 3A-B иллюстрируют, каким образом лазерная система 92 может испускать импульсы в направлении поршня 36 в цилиндре 30, описанном выше со ссылкой на фиг. 1. Импульсы, испускаемые лазерной системой 92, например, импульс 302, показанный на фиг. 3A, могут направляться в направлении верхней поверхности 313 поршня 36. Импульс 302 может отражаться от верхней поверхности поршня, и обратный импульс, например, импульс 304, может приниматься лазерной системой 92, который может использоваться для определения положения поршня 36 внутри цилиндра 30.
В некоторых примерах, расположение поршня может определяться посредством способов частотной модуляции, использующих частотно модулированных лазерных пучков с периодически повторяющимся линейным изменением частоты. В качестве альтернативы, способы фазового сдвига могут использоваться для определения расстояния. Посредством обнаружения доплеровского сдвига или посредством сравнения образцовых положений в два разных момента времени, может логически выводиться информация о положении, скорости поршня и числе оборотов двигателя (измерение RPM). Положения впускного клапана 352 и/или выпускного клапана 354 также могут определяться с использованием лазерной системы. Когда идентичность цилиндра (CID) комбинируется с положением поршня, положение двигателя может определяться и использоваться для синхронизации подачи топлива и установки фаз клапанного распределения. Такие позиционные состояния двигателя могут быть основаны на положениях поршней и CID, определенных посредством лазеров.
Контроллер 12, кроме того, может управлять LCU 90 и включать в себя постоянный машинно-читаемый запоминающий носитель, включающий в себя управляющую программу для настройки местоположения подачи энергии лазерного излучения на основании условий эксплуатации, например, на основании положения поршня 36 относительно ВМТ. Контроллер 12 также может заключать в себе дополнительные или альтернативные датчики для определения режима работы двигателя 20, в том числе, дополнительные датчики температуры, датчики давления, датчики крутящего момента, а также датчики, которые выявляют частоту вращения двигателя, количество воздуха и величину впрыска топлива, как описано выше со ссылкой на фиг. 1. Дополнительно или в качестве альтернативы, LCU 90 может непосредственно поддерживать связь с различными датчикам, такими как датчики 118 на эффекте Холла, чье включение в состав может быть необязательным, для определения рабочего или диагностического режима двигателя 20.
Лазерная система, к тому же, может использоваться для измерения положения кулачков, например, посредством блокирования испускаемых импульсов во время определенных тактов цикла двигателя. Например, в одном из вариантов осуществления, лазерная система 92 может быть расположена возле впускного клапана 352, таким образом, измерение положения поршня внутри цилиндра предотвращается во время такта впуска ездового цикла. Во время такта впуска, клапан 352 открывается в камеру и блокирует испускаемые лазерные импульсы от отражения от верхней поверхности поршня 313. Например, на фиг. 3B, так как лазерная система 92 размещена в непосредственной близости от впускного клапана 352, когда цилиндр 30 находится в своем такте впуска, клапан 352 открывается в камеру и блокирует лазерный импульс, например, лазерный импульс 306, от достижения верхней поверхности поршня 313. Контроллер 12 еще может быть запрограммирован для интерпретации детектированного сигнала, для того чтобы определять положения кулачков. Например, в этом примере, контроллер может обрабатывать отсутствие сигнала, принятого датчиком 94, чтобы указывать, что впускной клапан 352 находится в открытом положении. Эта информация и геометрия двигателя могут дополнительно обрабатываться контроллером для определения положения двигателя в пределах его ездового цикла. Хотя фиг. 3B приводит пример того, каким образом испускаемый импульс может блокироваться впускным клапаном 352, возможны другие конфигурации. Например, лазерная система может быть расположена в непосредственной близости от выпускного клапана вместо впускного клапана. Когда размещена в этом местоположении, испускаемые импульсы, взамен, могут блокироваться во время такта выпуска ездового цикла. Контроллер может быть калиброван, чтобы учитывать такие различия. Как подробно описано ниже, контроллер 12 может обрабатывать данные, собранные во время ездового цикла, чтобы определять положение двигателя.
Разновременность между испусканием светового импульса 302 и обнаружением отраженного светового импульса 304 фотодетектором 94 дополнительно может сравниваться с временным пороговым значением в качестве средства определения, произошло ли ухудшение характеристик лазерного устройства. Например, в двигателе внутреннего сгорания, камера сгорания может быть в от трех до четырех дюймов в длину. На основании этой оценки и скорости света в вакууме (c=3,0×108 м/с), импульс света, испущенный лазерной системой 92, отраженный от верхней поверхности поршня 313, может детектироваться в пикосекундном временном диапазоне. Временное пороговое значение основательно за пределами пикосекундного временного диапазона (например, 1 наносекунды), поэтому, может быть принято в качестве опорного значения для указания ухудшения характеристик лазерной системы. Например, импульс, испускаемый лазерной системой 92, чье обнаружение датчиком 94 занимает больше, чем 1 наносекунду, может указывать лазерную систему, потерявшую геометрическую точность.
В некоторых примерах, система 20 двигателя может быть включена в транспортное средство, разработанное для выполнения выключения холостого хода, когда удовлетворены условия выключения холостого хода, и автоматического перезапуска двигателя, когда удовлетворены условия перезапуска. Такие системы выключения холостого хода могут повышать экономию топлива, снижать выбросы в отработавших газах, шум, и тому подобное. В таких двигателях, работа двигателя может прекращаться в произвольном положении в пределах ездового цикла. По началу процесса для возобновления работы двигателя, лазерная система может использоваться для определения специфичного положения двигателя. На основании этой оценки, лазерная система может производить определение в отношении того, какой цилиндр должен снабжаться топливом первым, для того чтобы начинать процесс возобновления работы двигателя из состояния покоя. В транспортных средствах, выполненных с возможностью выполнять операции выключения холостого хода, в которых остановки и перезапуски двигателя повторяются много раз во время операции вождения, остановка двигателя в требуемом положении может предусматривать запуски с более высокой повторяемостью, и таким образом, лазерная система может использоваться для измерения положения двигателя во время выключения (после выведения из работы впрыска топлива, искрового зажигания и т.д.), в то время как двигатель прекращает вращение до состояния покоя, так что крутящий момент электродвигателя или другой момент сопротивления могут переменно прикладываться к двигателю в ответ на управление положением останова двигателя в требуемое положение останова. Информация о положении поршня каждого цилиндра также может использоваться для оценки положений коленчатого вала. Как конкретизировано со ссылкой на фиг. 10, на основании относительного положения коленчатого вала каждого цилиндра, может достоверно идентифицироваться ухудшение характеристик коленчатого вала (такое как вследствие покоробленного или сломанного коленчатого вала). Как показано в материалах настоящей заявки, внутренняя часть конфигурации факела распыла дает показание освещенности.
В еще одном варианте осуществления, когда транспортное средство глушит свой двигатель, так как электродвигатель выключается, или так как транспортное средство решает работать в электрическом режиме, цилиндры двигателя могут в конечном счете останавливаться неуправляемым образом, что касается положения поршня 36 в цилиндре 30 сгорания и положений впускного клапана 352 и выпускного клапана 354. Для двигателя с четырьмя или более цилиндров, всегда может быть цилиндр, расположенный между закрыванием выпускного клапана (EVC) и закрыванием впускного клапана (IVC), когда коленчатый вал находится в состоянии покоя. Фиг. 4 показывает пример рядного четырехцилиндрового двигателя, способного к непосредственному впрыску топлива в камеру, остановленного в произвольном положении в своем ездовом цикле, и каким образом лазерная система зажигания может выдавать измерения, которые могут сравниваться между цилиндрами для идентификации положения двигателя. Будет принято во внимание, что примерное положение двигателя, показанное на фиг. 4, является примерным по природе, и что возможны другие положения двигателя.
Врезка на фигуре под 412 является схемой примерного блока 402 цилиндров рядного двигателя. В пределах блока находятся четыре отдельных цилиндра, где цилиндры 1-4 помечены 404, 406, 408 и 410, соответственно. Виды в поперечном разрезе цилиндров показаны скомпонованными согласно своему порядку работы цилиндров в примерном ездовом цикле, показанном на 415. В этом примере, положение двигателя является таким, что цилиндр 404 находится в такте выпуска ездового цикла. Выпускной клапан 413, поэтому, находится в открытом положении, а впускной клапан 414 закрыт. Так как цилиндр 408 работает последним в цикле, он находится в своем рабочем такте и, таким образом, выпускной клапан 416 и впускной клапан 418 находятся в закрытом положении. Поршень в цилиндре 408 расположен около НМТ. Цилиндр 410 находится в такте сжатия и, таким образом, выпускной клапан 420 и впускной клапан 422 также оба находятся в закрытом положении. В этом примере, цилиндр 406 работает последним, поэтому, находится в положении такта впуска. Соответственно, выпускной клапан 424 закрыт наряду с тем, что впускной клапан 426 открыт. Информация о положении клапанов каждого цилиндра также может использоваться для оценки положений распределительных валов, как конкретизировано на фиг. 10.
Каждый отдельный цилиндр в двигателе может включать в себя лазерную систему, присоединенную к нему, как показано на фиг. 1, описанной выше, на которой лазерная система 92 присоединена к цилиндру 30. Эти лазерные системы могут использоваться как для зажигания в цилиндре, так и определения положения поршней и кулачков в пределах цилиндра, как описано в материалах настоящей заявки. Например, фиг. 4 показывает лазерную систему 451, присоединенную к цилиндру 404, лазерную систему 453, присоединенную к цилиндру 408, лазерную систему 457, присоединенную к цилиндру 410, и лазерную систему 461, присоединенную к цилиндру 406.
Как описано выше, лазерная система может использоваться для измерения положений клапанов, а также положения поршня внутри камеры цилиндра. Например, в положении двигателя, показанном на фиг. 3B, свет из лазерной системы 92 может по меньшей мере частично блокироваться от достижения верхней части поршня 313 в цилиндре 30. Так как количество отраженного света уменьшено по сравнению с количеством света, отраженного от верхней поверхности поршня, когда испускаемые импульсы не блокируются, контроллер 12 может быть запрограммирован учитывать такие отличия и использовать информацию для определения, что впускной клапан 352 открыт. На основании очередности действий клапанов в пределах ездового цикла, контроллер 12 дополнительно определяет, что выпускной клапан 354 закрыт. Так как приведенный пример основан на четырехцилиндровом двигателе, один из цилиндров всегда будет находиться в такте впуска. По существу, контроллер может быть запрограммирован обрабатывать данные из всех лазерных систем, для того чтобы идентифицировать цилиндр в его такте впуска. На основании этого определения и использования геометрии двигателя, положение двигателя может идентифицироваться с использованием лазерных систем. В качестве альтернативы, как будет подробнее описано ниже, контроллер также может быть запрограммирован обрабатывать последовательность измерений из одиночного лазерного детектора, присоединенного к цилиндру, в качестве средства идентификации положения двигателя.
Положения поршней в цилиндре могут измеряться относительно любых пригодных опорных точек и могут использовать любые пригодные масштабные коэффициенты. Например, положение цилиндра может измеряться относительно положения ВМТ цилиндра и/или положения НМТ цилиндра. Например, фиг. 4 показывает линию 428 через поперечные сечения цилиндров в положении НМТ и линию 430 через поперечные сечения цилиндров в положении ВМТ. Хотя множество опорных точек и масштабов могут быть возможными во время определения положения поршня, примеры, показанные здесь, основаны на расположении поршня внутри камеры. Например, может использоваться масштаб, используемый в измеренном смещении, сравниваемом с известными положениями внутри камеры. Другими словами, расстояние от верхней поверхности поршня, показанного под 432 на фиг. 4, относительно положения ВМТ, показанного под 428, и положения НМТ, показанного под 430, может использоваться для определения относительного положения поршня в цилиндре. Ради простоты, показан образцовый масштаб, калиброванный для расстояния от лазерной системы до поршня. В этом масштабе, начало 428 отсчета представлено в качестве X (причем, X=0 соответствует ВМТ), а расположение 430 поршня, самое дальнее от лазерной системы, соответствующее максимальному линейному расстоянию, пройденному поршнем, представлено в качестве xmax (причем X=xmax соответствует НМТ). Например, на фиг. 4, расстояние 471 от ВМТ 428 (которая может быть взята в качестве начала отсчета) до верхней поверхности 432 поршня в цилиндре 404 может быть по существу таким же, как расстояние 432 от ВМТ 428 до верхней поверхности 432 поршня в цилиндре 410. Расстояния 471 и 432 могут быть меньшими (относительно ВМТ 428), чем расстояния 473 и 477 от ВМТ 428 до верхних поверхностей поршней в цилиндрах 408 и 406, соответственно.
Поршни могут работать циклически, и таким образом, их положения внутри камеры могут быть связаны через единый показатель относительно ВМТ и/или НМТ. В целом, это расстояние, 432 на фигуре, может быть представлено в качестве ΔX. Лазерная система может измерять эту переменную для каждого поршня в пределах его цилиндра, а затем, использовать информацию для определения, должно ли выполняться дополнительное действие. Например, лазерная система могла бы отправлять сигнал в контроллер, указывающий ухудшение характеристик коленчатого вала, если переменная отличается на пороговую величину среди двух или более цилиндров. Понятно, что переменная X должна представлять множество показателей, которые могут измеряться системой, один из примеров которых описан выше. Приведенный пример основан на расстоянии, измеренном лазерной системой, которое может использоваться для идентификации расположения поршня внутри его цилиндра.
Со ссылкой на фиг. 4, контроллер может быть запрограммирован определять положение двигателя с использованием различных способов. Например, контроллер может быть запрограммирован обрабатывать последовательность данных, собранных из одиночной лазерной системы, например, лазерной системы 461 в цилиндре 406, чтобы определять положение каждого поршня цилиндра и, в силу этого, логически выводить положение двигателя. Примерная многомерная характеристика лазерной системы, работающей в двух разных режимах низкой мощности для определения установки фаз клапанного распределения и положения поршня, что касается положения двигателя, во время примерного цикла двигателя, показана на фиг. 5 и описана ниже. В качестве альтернативы, контроллер может быть запрограммирован обрабатывать данные, собранные из двух или более лазерных систем, для определения положения двигателя.
Фиг. 5 показывает график 500 примерных установки фаз клапанного распределения и положение поршня, что касается положения двигателя (градусов угла поворота кривошипа) в пределах четырех тактов (впуска, сжатия, рабочего и выпуска) цикла двигателя для четырехцилиндрового двигателя с порядком работы цилиндров 1-3-4-2. График 500 показывает кривые установки фаз распределения впускного клапана и положения поршня наряду с двумя примерными режимами определения положения лазерной системы. Лазерная система, например, лазерная система 461, присоединенная к цилиндру 406 на фиг. 1, может испускать последовательность импульсов низкой мощности на всем протяжении цикла двигателя, но детектировать два разных световых сигнала для оценки положения клапана и оценки положения поршня в цилиндре. Со ссылкой на пример, показанный на фиг. 4, лазерная система 461 может детектировать световую энергию, отраженную от верхней поверхности поршня во время тактов сжатия, рабочего и выпуска ездового цикла, когда впускной клапан закрыт. Этот режим детектирования, показанный под 506 на фиг. 5, может быть первым режимом детектирования низкой мощности (указываемым ссылкой как LD1 на изображенной фигуре). Несмотря на то, что лазерный детектор считывает световую энергию, отраженную от верхней части поршня в LD1, он может не считывать положение впускного клапана 426 относительно выпускного клапана 424. Контроллер может использовать информацию, сформированную во время LD1, чтобы определять положение поршня каждого цилиндра. Затем, посредством сравнения относительного положения поршня между цилиндрами, может выполняться диагностика коленчатого вала.
Наоборот, когда цилиндр двигателя входит в такт впуска ездового цикла, лазерный детектор 461 может детектировать ослабленный сигнал, поскольку его испускание по меньшей мере частично блокируется открытым впускным клапаном. Этот режим детектирования, показанный под 508, может быть вторым режимом детектирования низкой мощности (указываемым ссылкой как LD2 на изображенной фигуре). В то время как в LD2, лазерный детектор, например, может считывать положение впускного клапана, но не положение поршня внутри камеры цилиндра. Контроллер может использовать информацию, сформированную во время LD2, для определения положения впускного клапана каждого цилиндра. Затем, посредством сравнения относительного положения впускного клапана между цилиндрами, может выполняться диагностика распределительного вала. Кроме того еще, посредством сравнения положения коленчатого вала и положения распределительного вала каждого цилиндра, может идентифицироваться нарушение ориентации между коленчатым валом и распределительным валом для каждого цилиндра.
На 502, профиль подъема клапана показан для впускного клапана 426. В начале такта впуска, профиль показывает, что клапан открывается, а затем, закрывается, в то время как поршень перемещается из ВМТ в НМТ Хотя профиль подъема клапана не показан для выпускного клапана, например, выпускного клапана 424, подобный профиль по выбору может быть включен в состав, чтобы показать, что выпускной клапан открывается, а затем, открывается, в то время как поршень перемещается из НМТ в ВМТ во время такта выпуска ездового цикла двигателя.
На 504, циклическая природа поршня показана для четырех тактов ездового цикла. Например, поршень постепенно перемещается вниз от ВМТ, доходя до низшей точки в НМТ к концу такта впуска. Поршень затем возвращается вверх, в ВМТ, к концу такта сжатия. Поршень затем вновь перемещается обратно вниз, по направлению к НМТ, в течение рабочего такта, возвращаясь в свое исходное верхнее положение в ВМТ к концу такта выпуска. Как изображено, многомерная характеристика иллюстрирует положение двигателя по оси x в градусах угла поворота коленчатого вала (CAD). Для приведенной примерной кривой, положение поршня не показано во время такта впуска, чтобы проиллюстрировать сигнал, ослабляемый вследствие существенно блокированных лазерных импульсов (например, блокированных на более чем 90%).
Образцовые наборы данных показаны на 510 и 512, чтобы иллюстрировать, каким образом разные наборы данных могут собираться лазерной системой. Например, лазерная система 461 может начинать сбор данных вслед за командой остановки двигателя, по мере того как двигатель завершает свои последние несколько циклов перед приходом в состояние покоя в положении P1. Так как P1 расположено в такте впуска, 510 показывает, что сигнал, собранный лазерным детектором, может нарушаться впускным клапаном. По мере того, как клапан открывается, испускаемый импульс по меньшей мере частично блокируется, что может давать в результате существенно ослабленный сигнал. Контроллер 12 может обрабатывать этот сигнал, чтобы идентифицировать открытый впускной клапан и использовать лазерную систему, присоединенную к другому цилиндру, например, лазерную систему 457, для измерения положения ее поршня. Геометрия двигателя в таком случае может использоваться для связывания всех из переменных в качестве средства идентификации положения коленчатого вала или распределительного вала.
Так как действие ездового цикла двигателя является циклическим по природе, во время определенных частей ездового цикла, второй набор данных может быть по существу идентичным показанному на 510. Чтобы отличать эти две области друг от друга и однозначно идентифицировать положение двигателя, контроллер может быть запрограммирован для обработки последовательности данных, чтобы определять положение двигателя по форме кривой. На 512, показана вторая кривая, по мере того как поршень в цилиндре 406 приближается к ВМТ во время такта сжатия ездового цикла. Однако, так как впускной клапан остается закрытым во время обоих тактов, сжатия и рабочего, никакого блокирования лазерного сигнала не происходит, и детектируется гладкий набор данных. Контроллер может быть запрограммирован обрабатывать такие данные и использовать форму кривой наряду с геометрией двигателя, чтобы идентифицировать положение двигателя, а также коленчатых валов и распределительных валов цилиндров.
Далее, с обращением к фиг. 6, показан примерный способ 600 для выполнения процедуры диагностики, чтобы диагностировать различные компоненты внутри цилиндра с использованием света от лазерного импульса низкой мощности, испущенного лазерной системой зажигания двигателя, такой как лазерная система по фиг. 1. Диагностический режим, изображенный на фиг. 6, предоставляет возможность для детектирования различных компонентов во время такта впуска цикла сгорания цилиндра.
На 602, может подтверждаться, что двигатель включен и работает. Например, может подтверждаться, что гибридная силовая установка находится в режиме работы от двигателя. Если нет, процедура переходит на 604 для выполнения процедур диагностики выключенного двигателя, если условия диагностики сочтены удовлетворенными. Если двигатель включен, то, на 606, определяется, был ли выбран первый диагностический режим (Режим_1, Mode_1). Первый диагностический режим может выбираться, если удовлетворены заданные условия эксплуатации. Например, могут подтверждаться условия сгорания в двигателе. В качестве альтернативы, пороговая длительность или расстояние могут истечь после последнего повторения первого диагностического режима. При работе в первом диагностическом режиме, лазерные импульсы могут испускаться в диапазоне более низкой мощности во время такта впуска каждого цилиндра. По существу, множество процедур диагностики, каждая направлена на один или более компонентов цилиндра, могут выполняться во время работы в первом диагностическом режиме.
Если первый диагностический режим не выбран, процедура переходит на 608 для определения, был ли выбран второй диагностический режим (Режим_2, Mode_2). Второй диагностический режим может выбираться, если удовлетворены заданные условия эксплуатации. Например, могут подтверждаться условия сгорания в двигателе. В качестве альтернативы, пороговая длительность или расстояние могут истечь после последнего повторения второго диагностического режима. По существу, множество процедур диагностики, каждая направлена на один или более компонентов цилиндра, могут выполняться во время работы в первом диагностическом режиме. Если условия второго диагностического режима подтверждены, процедура переходит на фиг. 7, чтобы выполнять процедуры диагностики во втором режиме. При работе во втором диагностическом режиме, лазерные импульсы могут испускаться в диапазоне более высокой мощности во время такта сжатия каждого цилиндра. Если не подтверждены ни первый, ни второй диагностический режим, процедура переходит на 610, где лазерное устройство зажигания эксплуатируется на более высоком уровне мощности (выше порогового уровня мощности), с тем чтобы воспламенять топливо-воздушную смесь в цилиндре двигателя. На нем, лазерное устройство зажигания приводится в действие во время такта сжатия цилиндра на более высокой мощности, чтобы инициировать сгорание топлива в цилиндре.
Возвращаясь на 606, если первый диагностический режим подтвержден, то, на 612, процедура включает в себя прием входного сигнала касательно выбранной процедуры диагностики. Как обсуждено выше, различные процедуры диагностики, направленные на различные компоненты цилиндра, могут выполняться во время работы в первом диагностическом режиме. Контроллер может принимать входной сигнал от оператора транспортного средства, к примеру, через устройство 135 отображения по фиг. 2, касательно компонента, который должен диагностироваться в первом режиме работы. Компоненты или условия внутри цилиндра, диагностируемые во время работы в первом диагностическом режиме, могут включать в себя, в качестве неограничивающих примеров, топливную форсунку цилиндра (например, для диагностирования конфигурации факела распыла форсунки), поршневое кольцо цилиндра (например, для диагностирования на утечки через кольца), углеродистые отложения в цилиндре, недостаточный поток всасываемого воздуха и наличие инородного объекта в цилиндре. По существу, на основании компонента, который должен диагностироваться, количество, местоположение и угол изображений, захватываемых фотодетектором лазерной системы, а также отображаемое опорное изображение, могут меняться.
На 614, после приема входного сигнала, процедура включает в себя приведение в действие лазерного устройства зажигания (например, лазерной системы по фиг. 1) во время такта впуска цилиндра на более низкой мощности. Приведение в действие на более низкой мощности включает в себя приведение в действие а более низкой мощности, чем пороговая мощность, требуемая для инициации сгорания в цилиндре. Посредством приведения в действие лазерного устройства зажигания на более низкой мощности во время такта впуска, лазерные импульсы могут направляться в цилиндр, чтобы осуществлять планарную развертку цилиндра во время такта впуска. В силу лазера, быстрой развертки лазером внутренней части цилиндра во время такта впуска, цилиндр может освещаться, как будто электрической лампочкой, и освещение может использоваться для захвата изображений внутренней части цилиндра, тем самым, предоставляя оператору возможность наблюдать и оценивать внутреннюю часть цилиндра без необходимости снятия компонентов для визуального контроля.
В некоторых примерах, планарная развертка может быть основана на диагностируемом компоненте или состоянии цилиндра. Например, при диагностировании конфигурации факела распыла топливной форсунки, планарная развертка лазерного устройства зажигания может быть ориентирована на траекторию факела распыла топливной форсунки цилиндра. Лазер может подвергаться развертке в плоскости на траекторию факела распыла в точные моменты времени после начала впрыска топлива во время такта впуска. В сравнение, при диагностировании поршневого кольца цилиндра, планарная развертка может быть ориентирована в направлении поверхности поршня. Планарная развертка, используемая во время анализа топливной форсунки, может быть более широкой разверткой, чем развертка, используемая для анализа поршня. Как конкретизировано ниже, определение ухудшения характеристик компонентов может быть основано на входном сигнале от оператора или может быть автоматическим определением.
В некоторых вариантах осуществления, поскольку двигатель присоединен в транспортном средстве с гибридным электрическим приводом, процедура может включать в себя поддержание опорных числа оборотов и нагрузки двигателя во время приведения в действие лазерного устройства зажигания с помощью настроек в отношении электродвигателя. Это предоставляет числу оборотов и нагрузке двигателя возможность точно регулироваться предопределенным состоянием для каждой диагностической проверки, улучшая точность и достоверность результатов. Она также понижает нестабильность результатов проверки, обусловленную изменениями условий двигателя.
На 616, процедура включает в себя прием изображений внутри цилиндра из фотодетектора. Более точно, фотодетектор может использовать световую энергию от испускания лазерного импульса, чтобы захватывать изображения внутренней части цилиндра. Захваченные изображения затем передаются на устройство отображения, например, беспроводным образом. В некоторых примерах, регулировки камеры фотодетектора, применяемые во время разных процедур диагностики диагностического режима_1 могут быть основаны на диагностируемом компоненте. Настраиваемые регулировки камеры, например, могут включать в себя длительность открывания затвора, регулировки диафрагмы, время захвата изображения и т.д. В качестве примера, во время анализа топливной форсунки, затвор камеры может открываться на большую длительность, так чтобы несколько разверток цилиндра захватывались в одиночном изображении. В сравнении, во время анализа углеродистых отложений на стенке цилиндра, затвор камеры может открываться на меньшую длительность, и многочисленные изображения могут захватываться за несколько разверток.
На 618, процедура включает в себя отображение изображения(ий) внутри цилиндра, захваченного фотодетектором, оператору на устройстве отображения. В материалах настоящей заявки, оператором транспортного средства, например, может быть механик или специалист по обслуживанию, диагностирующий двигатель. Например, после каждой планарной развертки лазером, захваченное изображение может автоматически представляться специалисту по обслуживанию для анализа.
По выбору, на 620, контроллер может отображать опорное изображение диагностируемого компонента или состояния оператору транспортного средства на устройстве отображения. Опорное изображение может храниться и извлекаться из памяти контроллера. Более того, опорное изображение может быть опорным изображением, сформированным ранее фотодетектором, таким как во время предопределенных условий (например, на предыдущем повторении данной процедуры диагностики, когда не выявлено ухудшение характеристик). Опорное изображение может извлекаться на основании входного сигнала касательно процедуры диагностики, принятого ранее на 612. Дополнительно, опорное изображение может выбираться на основании сформированного изображения. В качестве альтернативы, опорное изображение может извлекаться и отображаться вслед за входным сигналом оператора, принятым через устройство отображения, после отображения захваченного изображения(ий) на устройстве отображения. В качестве примера, когда диагностируемым компонентом цилиндра является топливная форсунка цилиндра, такая как топливная форсунка оконного впрыска цилиндра, изображение внутри цилиндра, сформированное фотодетектором, может быть указывающим конфигурацию факела распыла топливной форсунки, такую как конфигурация факела распыла топливной форсунки оконного впрыска. Опорное изображение, извлеченное контроллером, может иметь ожидаемую конфигурацию факела распыла от надлежащим образом функционирующей топливной форсунки. Пример такого сравнения обсужден в материалах настоящей заявки со ссылкой на фиг. 10. На основании различий между ожидаемой конфигурацией и действующей конфигурацией, оператор может быть способен указывать ухудшение характеристик топливной форсунки. Более точно, сравнение двух изображений может давать объективные данные необходимости в замене топливной форсунки.
На 622, процедура включает в себя прием входного сигнала от оператора транспортного средства касательно работоспособности диагностируемого компонента или состояния, входной сигнал оператора основан на отображенных изображении внутри цилиндра и опорном изображении. Например, оператор может сравнивать отображенное изображение с опорным изображением и, на основании большого расхождения, оператор может указывать, что произошло ухудшение характеристик компонента.
В одном из примеров, диагностируемым компонентом цилиндра могут быть поршневые кольца цилиндра, а сформированное изображение внутри цилиндра может быть указывающим состояние поршневых колец цилиндра. Отображенное опорное изображение может включать в себя изображение поршня цилиндра во время такта впуска. Если изображение внутри цилиндра, захваченное фотодетектором во время такта впуска, является указывающим конденсацию картерных паров на поршне, оператор может указывать, что поршневые кольца цилиндра подвергнуты ухудшению характеристик, и пары, поступающие из картера двигателя конденсируются в цилиндре возле поршня.
В качестве еще одного примера, диагностируемый компонент цилиндра может быть камерой сгорания цилиндра, и изображение внутри цилиндра может сравниваться с опорным изображением для указания, присутствует ли инородный объект (например, прыгающий по) в камере сгорания. Для выявления наличия инородных объектов, могут использоваться неподвижные и/или видеоизображения, захваченные фотодетектором. Неподвижные изображения могут включать в себя разделенные промежутками времени неподвижные изображения в течение такта впуска и такта выпуска (такого как такт выпуска, непосредственно предшествующий такту впуска). Если анализируются видеоизображения, анализ может включать в себя воспроизведение видеоизображений, захваченных во время такта впуска и такта выпуска. Видеоизображения могут воспроизводиться в замедленном темпе, чтобы выявлять инородные объекты (такие как гайка, болт, тряпка и т.д.), которые могут быть прыгающими по цилиндру. Инородный объект мог проникнуть в цилиндр во время предыдущих операций технического обслуживания и текущего ремонта или сборки двигателя, такой как когда устанавливался воздухозаборник. В ответ на выявление инородного объекта, диагностический код может устанавливаться, чтобы указывать, что объекту необходимо удаляться из конкретного цилиндра.
В качестве еще одного другого примера, изображения внутренней части цилиндра, захваченные во время такта впуска, могут анализироваться, чтобы оценивать углеродистые отложения в цилиндре. В нем, изображение стенки цилиндра может изучаться, и может отмечаться отражательная способность стенки. Отражательная способность стенки цилиндра в захваченном изображении может сравниваться с отражательной способностью стенки цилиндра в опорном изображении чистого цилиндра. По существу, чистый цилиндр может формировать блестящее изображение с высокой отражающей способностью стенки цилиндра. В сравнении, цилиндр с сажевыми отложениями может формировать тусклое или черное изображение с низкой отражательной способностью стенки цилиндра. Таким образом, на основании изображений, указывающих падение отражательной способности стенки цилиндра, может определяться, что есть углеродистые или сажевые отложения на стенке цилиндра. В ответ на отложения, диагностический код может устанавливаться для указания сажевых отложений. Контроллер также может предписывать двигателю работать на более бедной смеси, чем стехиометрия в течение некоторого периода времени, или предписывать, чтобы лазер выжигал зоны с избыточными углеродистыми отложениями для принятия мер в ответ на повышенные уровни сажи. Контроллер также может предписывать, чтобы диагностика исследовала целостность поршневых колец посредством тщательного исследования изображений из проверки.
По существу, анализ изображений, захваченных во время такта впуска, для анализа углеродистых отложений стенки цилиндра может быть отличным от анализа изображений, захваченных во время такта выпуска для выявления пропусков зажигания. В этом отношении, высокая отражательная способность стенки цилиндра во время такта выпуска может быть указывающей горячее пятно, которое может повышать склонность к пропускам зажигания. Поэтому, в ответ на высокую отражательную способность стенки цилиндра, наблюдаемую во время такта выпуска, горячее пятно с углеродистыми отложениями может определяться, и может запрашиваться выжигание сажи. В сравнение, в ответ на низкую отражательную способность стенки цилиндра, наблюдаемую во время такта впуска, углеродистые отложения могут определяться, и может запрашиваться выжигание сажи.
В еще одном другом примере, конкретизированном в материалах настоящей заявки со ссылкой на фиг. 1, диагностируемый компонент цилиндра может быть впускным клапаном, при этом, изображение внутри цилиндра, захваченное в разные моменты времени после открывания впускного клапана, может сравниваться с опорным изображением, чтобы указывать поступление или утечку охлаждающей жидкости в цилиндр через впускной клапан.
Если принят входной сигнал оператора, указывающий ухудшение характеристик, то, на 624, в ответ на входной сигнал оператора, процедура включает в себя установку диагностического кода для указания ухудшения характеристик компонента. Диагностический код также может указывать, что требуется замена или ремонт компонента, при необходимости. Если ухудшение характеристик компонента не определено оператором, то, на 626, процедура указывает, что диагностируемые компонент или состояние не подвергнуты ухудшению характеристик, и что компонент находится в хорошей работоспособности.
С 624 и 626, процедура переходит на 628, на котором определяется, был ли принят новый запрос процедуры диагностики. Например, может определяться, были ли удовлетворены условия для еще одной процедуры диагностики, которая использует освещение от работы лазера на низкой мощности в такте впуска. Если да, процедура возвращается на 612, чтобы принимать входной сигнал касательно диагностики, которая должна выполняться, и компонента или состояния, которые должны диагностироваться. Процедура затем повторяется. Процедура по фиг. 6 повторяется с 612 по 628, чтобы завершать все процедуры диагностики, которые могут выполняться наряду с работой в первом диагностическом режиме. Если условия для конкретной процедуры диагностики не удовлетворены, или если выполнено достаточное количество (например, все) процедур диагностики Диагностического режима_1, процедура 600 может заканчиваться.
Несмотря на то, что вышеприведенная процедура изображает необходимость, чтобы оператор анализировал сформированное изображение(ия) и указывал, произошло ли ухудшение характеристик компонентов, в альтернативных вариантах осуществления, анализ может быть автоматическим. Например, вслед за захватом изображения в такте впуска, изображение может автоматически отображаться на устройстве отображения, и соответствующее опорное изображение также может автоматически отображаться на устройстве отображения. Контроллер затем может сравнивать изображения, не требуя входного сигнала оператора, чтобы выдавать результат успешного прохождения/несостоятельности процедуры диагностики. Определение успешного прохождения/несостоятельности может быть основано на подобии изображений (то есть, сформированного изображения и опорного изображения) с помощью более простого, в меньшей степени требующего большого объема вычислений сравнения пикселей, или расширенного, в большей степени требующего большого объема вычислений анализа изображений. В расширенном анализе изображений, объекты в пределах изображения могут идентифицироваться для более точной оценки исследуемых компонента или состояния.
Кроме того, будет приниматься во внимание, что, несмотря на то, что вышеприведенная процедура предлагает использование лазерной системы, присоединенной к двигателю в целях диагностики, в альтернативных примерах, лазерная система, включающая в себя задающий генератор лазерного излучения, линзы и фотодетектор, может быть сконфигурирована в качестве переносного лабораторного оборудования. В них, лазерная система может быть сконфигурирована в качестве ручного инструментального средства, которое может присоединяться к любому двигателю, такому как двигатель со свечами зажигания, или двигатель, который был снят с транспортного средства, и использоваться для анализа двигателя. В качестве примера, переносное инструментальное средство может размещаться во впускном коллекторе или впускном окне двигателя, чтобы осматривать и анализировать конфигурацию факела распыла форсунки (такую как конфигурация факела распыла форсунки оконного впрыска) для двигателя. В качестве еще одного примера, в случае двигателей со свечами зажигания, переносное инструментальное средство может преимущественно использоваться для анализа качества искры, а также образования нагара на свечах зажигания. В качестве дополнительного примера, свеча зажигания цилиндра может сниматься, и переносное инструментальное средство может размещаться на месте свечи зажигания для захвата изображений внутренней части цилиндра и анализа компонентов внутри цилиндра. По существу, переносное инструментальное средство может обеспечивать различные преимущества над основанными на искровом зажигании инструментальными средствами. Например, посредством замены свечи зажигания лазером, образование нагара на свече зажигания может не вызываться продолжительным использованием, как может происходить в лабораторной установке. В качестве еще одного примера, переносное инструментальное средство может включать в себя свой собственный блок отображения видео и обработку для использования на транспортных средствах, которые не владеют интерфейсным устройством отображения лазерной диагностики.
В одном из примеров, система транспортного средства с гибридным приводом содержит двигатель, который включает в себя цилиндр; электродвигатель; устройство отображения в кабине транспортного средства; а также лазерную систему зажигания, присоединенную к головке цилиндра и выполненную с возможностью направлять световые импульсы в цилиндр. Двигатель дополнительно включает в себя систему фотодетектирования, которая присоединена к лазерной системе зажигания и цилиндру для формирования изображений внутренности цилиндра с использованием лазерных импульсов из лазерной системы зажигания. Система фотодетектирования, например, может включать в себя ПЗС-камеру с линзой типа рыбий глаз Система транспортного средства дополнительно может включать в себя контроллер с постоянной памятью и машинно-читаемыми командами для: приведения в действие лазерной системы зажигания во время такта впуска на более низком уровне мощности; отображения изображения внутри цилиндра, сформированного системе фотодетектирования вслед за приведением в действие, оператору транспортного средства на устройстве отображения; и дополнительного отображения опорного изображения, извлеченного из памяти контроллера, на устройстве отображения, опорное изображение основано на сформированном изображении внутри цилиндра. Контроллер может принимать входной сигнал от оператора транспортного средства через устройство отображения, указывающее ухудшение характеристик компонента цилиндра, и устанавливать диагностический код на основании принятого входного сигнала. Контроллер может включать в себя дополнительные команды для настройки отдаваемой мощности электродвигателя при вводе в действие лазерной системы зажигания, чтобы поддерживать опорные число оборотов и нагрузку двигателя во время формирования изображения внутри цилиндра. Опорные число оборотов и нагрузка двигателя могут соответствовать предопределенным условиям для специфичных процедур диагностики. Это предоставляет возможность для лучшего контроля над условиями эксплуатации, в которых захвачены изображения, относительно тех, когда захватывалось опорное изображение.
Далее, с обращением к фиг. 7, показан примерный способ 700 для выполнения процедуры диагностики, чтобы диагностировать различные компоненты внутри цилиндра с использованием света от лазерного импульса высокой мощности, испущенного лазерной системой зажигания двигателя, такой как лазерная система по фиг. 1. Диагностический режим, изображенный на фиг. 7, предоставляет возможность для детектирования различных компонентов во время события сгорания в цилиндре.
На 702, определяется, был ли выбран второй диагностический режим (Режим_2). Второй диагностический режим может выбираться, если удовлетворены заданные условия эксплуатации. Например, могут подтверждаться условия сгорания в двигателе. В качестве альтернативы, пороговая длительность или расстояние могут истечь после последнего повторения второго диагностического режима. По существу, множество процедур диагностики, каждая направлена на один или более компонентов цилиндра, могут выполняться во время работы во втором диагностическом режиме.
Если первый диагностический режим не выбран, процедура переходит на 608 для определения, был ли выбран второй диагностический режим (Режим_2, Mode_2). Второй диагностический режим может выбираться, если удовлетворены заданные условия эксплуатации. Например, могут подтверждаться условия сгорания в двигателе. В качестве альтернативы, пороговая длительность или расстояние могут истечь после последнего повторения второго диагностического режима. По существу, множество процедур диагностики, каждая направлена на один или более компонентов цилиндра, могут выполняться во время работы в первом диагностическом режиме. Если условия второго диагностического режима не подтверждены, на 704, лазерное зажигание может деактивироваться. Лазерное зажигание, в таком случае, остается деактивированным до тех пор, пока не требуется зажигание в цилиндре, или до тех пор, пока не подтверждены условия для процедуры диагностики по Режиму_2.
Если второй диагностический режим подтвержден, на 706, процедура включает в себя прием входного сигнала касательно выбранной процедуры диагностики. Как обсуждено выше, различные процедуры диагностики, направленные на различные компоненты цилиндра, могут выполняться во время работы во втором диагностическом режиме. Контроллер может принимать входной сигнал от оператора транспортного средства, к примеру, через устройство 135 отображения по фиг. 2, касательно компонента, который должен диагностироваться во втором режиме работы. Компоненты или условия внутри цилиндра, диагностируемые во время работы во втором диагностическом режиме, могут включать в себя, в качестве неограничивающих примеров, условия днища поршня цилиндра, ориентацию собирающей линзы лазерной системы, параметры сгорания в цилиндре, такие как распространение пламени, зарождение пламени, а также регулирование топливо-воздушного соотношения. По существу, на основании компонента или условий, которые должны диагностироваться, количество, местоположение и угол изображений, захватываемых фотодетектором лазерной системы, а также отображаемое опорное изображение, могут меняться.
На 708, после приема входного сигнала, процедура включает в себя инициацию сгорания в цилиндре посредством приведения в действие лазерного устройства зажигания (например, лазерной системы по фиг. 1). Это может включать в себя приведение в действие лазерного устройства зажигания на более высоком уровне мощности, таком как уровень мощности, более высокий, чем пороговая мощность, требуемая только для освещения внутренней части цилиндра. В дополнение, лазерное устройство зажигания может приводиться в действие, чтобы направлять лазерные импульсы в цилиндр, чтобы осуществлять планарную развертку цилиндра во время такта сжатия цилиндра. Например, лазерные импульсы могут направляться в центр цилиндра, чтобы давать беспрепятственную, равномерную и завершенную картину сгорания у всего цилиндра, начинающуюся с точки или линии в центре и перемещающуюся радиально наружу к стенкам, заканчиваясь мгновенно. В дополнение, пространства трещин могут получать дополнительное попадание. Таким образом, свет от пламени зажигания может использоваться для анализа пламени сгорания. В силу быстрого развертывания лазером внутренней части цилиндра во время такта сжатия, может инициироваться сгорание в цилиндре, и цилиндр может освещаться, как будто электрической лампочкой, с использованием света, вырабатываемого от сгорания в цилиндре. Освещение может использоваться для захвата изображений внутренней части цилиндра, тем самым, предоставляя оператору возможность наблюдать и оценивать внутреннюю часть цилиндра без необходимости снятия компонентов для визуального контроля. В некоторых примерах, как обсуждено ранее, планарная развертка может быть основана на диагностируемом компоненте или состоянии цилиндра. По существу, поскольку пламя может загораживать обзор частей цилиндра во время сгорания, эффект электрической лампочки обеспечивается разверткой лазером низкой энергии, когда пламя закончилось
В некоторых вариантах осуществления, где двигатель присоединен в транспортном средстве с гибридным электрическим приводом, процедура может включать в себя поддержание опорных числа оборотов и нагрузки двигателя во время приведения в действие лазерного устройства зажигания с помощью настроек в отношении электродвигателя. Это предоставляет числу оборотов и нагрузке двигателя возможность точно регулироваться предопределенным состоянием для каждой диагностической проверки, улучшая точность и достоверность результатов. Она также понижает нестабильность результатов проверки, обусловленную изменениями условий двигателя.
На 710, процедура включает в себя прием изображений внутри цилиндра из фотодетектора. Более точно, фотодетектор может использовать свет, вырабатываемый от сгорания в цилиндре (вслед за лазерным зажиганием), чтобы захватывать изображения внутренней части цилиндра. Захваченные изображения затем передаются на устройство отображения, например, беспроводным образом.
На 712, процедура включает в себя отображение изображения(ий) внутри цилиндра, захваченного фотодетектором, оператору транспортного средства. В материалах настоящей заявки, оператором транспортного средства, например, может быть механик или специалист по обслуживанию, диагностирующий двигатель. Например, после каждого события сгорания, захваченное изображение может автоматически представляться специалисту по обслуживанию для анализа. В качестве альтернативы, после каждого события сгорания, изображение каждой лазерной развертки может отправляться оператору.
По выбору, на 714, контроллер может отображать опорное изображение диагностируемого компонента или состояния оператору транспортного средства на устройстве отображения. Опорное изображение может храниться и извлекаться из памяти контроллера. Опорное изображение может включать в себя опорное изображение, сформированное ранее фотодетектором во время предопределенных условий, такое как на предыдущем повторении данной процедуры диагностики, когда не было обнаружено ухудшение характеристик. Опорное изображение может извлекаться на основании входного сигнала касательно процедуры диагностики, принятого ранее на 706. Дополнительно, опорное изображение может выбираться на основании сформированного изображения. В качестве альтернативы, опорное изображение может извлекаться и отображаться вслед за входным сигналом оператора, принятым через устройство отображения, после отображения захваченного изображения(ий) на устройстве отображения.
В качестве примера, когда диагностируемым компонентом цилиндра является поршень, изображение внутри цилиндра, сформированное фотодетектором, может быть указывающим днище поршня. Опорное изображение, извлеченное контроллером, может быть функционирующим (то есть, не подвергнутым ухудшению характеристик) днищем поршня подобной длительности работы. На основании различий между опорным изображением и действующим изображением, оператор может быть способным указывать ухудшение характеристик днища поршня, такое как расплавление днища поршня. Более точно, сравнение двух изображений может давать объективные данные необходимости в замене поршня.
На 716, процедура включает в себя прием входного сигнала от оператора транспортного средства касательно работоспособности диагностируемого компонента или состояния, входной сигнал оператора основан на отображенных изображении внутри цилиндра и опорном изображении. Например, оператор может сравнивать отображенное изображение с опорным изображением и, на основании расхождения, оператор может указывать, что произошло ухудшение характеристик компонента.
В одном из примеров, диагностируемым параметром сгорания в цилиндре может быть распространение пламени сгорания в цилиндре. Отображенное изображение может включать в себя разделенные промежутками времени изображения фронта пламени, в том числе, изображения продвижения пламени от центра цилиндра наружу. Изображения могут захватываться в точные моменты времени, включающие в себя и сопровождающие событие лазерного зажигания. Отображаемое опорное изображение может, подобным образом, включать в себя разделенные промежутками времени изображения фронта пламени, как ожидается, от центра цилиндра наружу, в соответствующие моменты времени в известном в качестве хорошего цилиндре. Если форма и/или интенсивность пламени по мере того, как оно продвигается в захваченном изображении, не соответствуют ожидаемым форме и интенсивности в качестве известных из опорного изображения, может определяться ухудшение распространения пламени. Например, фронт пламени в опорном изображении может формировать шаровидную форму. Если захваченное изображение не показывает фронт пламени с шаровидной формой, может определяться ненадлежащее распространение пламени. В качестве еще одного примера, если фронт пламени в захваченном изображении имеет более низкую интенсивность, чем фронт пламени опорного изображения, может определяться ненадлежащее распространение пламени. В ответ на указание ухудшения характеристик фронта пламени, может устанавливаться диагностический код. Если оставшаяся лазерная диагностика вся успешно пройдена (то есть, не определено ухудшения характеристик), может указываться, что требуется дополнительный анализ топлива или сжатия. Иначе, подвергнутый ухудшению характеристик компонент цилиндра или лазерной системы управления идентифицируется посредством оставшейся диагностики уникальным диагностическим кодом.
В качестве еще одного примера, диагностируемый параметр сгорания может включать в себя зарождение пламени. Это отражает место, где возникает фронт пламени. Например, сформированные изображения могут быть указывающими место на днище поршня, где инициирован фронт пламени. Поскольку сгорание инициируется с помощью лазерного зажигания, место зарождения фронта пламени соотносится с местоположением, где сведение линзы создает интенсивность лазерного излучения, достаточную, чтобы вызывать сгорание в смеси, или где лазер может воздействовать на цилиндр. То есть, захваченное изображение является указывающим ориентацию лазерных импульсов, выдаваемых лазерным устройством зажигания. Опорное изображение может указывать местоположение на днище поршня, где ожидается, что должен зарождаться фронт пламени, и ожидается, куда сначала должен попадать лазер. Если захваченное изображение указывает, что место зарождения пламени находится сбоку от ожидаемого места (например, создает хорду), может указываться ухудшение характеристик. Более точно, может указываться неправильная ориентация или нацеливание лазера. В ответ на указание неправильной ориентации, может устанавливаться диагностический код, чтобы зафиксировать смещение лазерного устройства.
Сформированные изображения местоположения на днище поршня, где инициируется фронт пламени, также может быть указывающим фокусную точку линзы (такой как собирающая линза), присоединенной к лазерному устройству зажигания. Поскольку место зарождения фронта пламени соотносится с местоположением, где интенсивность лазерного воздействия является наивысшей при условии, что ориентация лазерного устройства правильна, место зарождения пламени соотносится с фокусной точкой собирающей линзы. Более того, местоположение, где интенсивность фронта пламени является наивысшей, соотносится с фокусной точкой собирающей линзы, которая может быть точно по центру объема цилиндра или на днище поршня. Если захваченное изображение указывает, что место зарождения пламени находится сбоку от ожидаемого места (например, создает хорду), может указываться ухудшение характеристик. Более точно, может указываться неправильная ориентация линзы и неправильное зарождение пламени. В качестве альтернативы, захваченное изображение может использоваться для расчета расстояния от лазера, где возникала вспышка и зарождалось пламя. Если рассчитанное расстояние является отличным от расстояния, рассчитанного на основании опорного изображения, может определяться неправильная ориентация линзы. В ответ на указание неправильной ориентации линзы, может устанавливаться диагностический код для приведения в порядок ориентации линзы.
Будет принято во внимание, что, в некоторых примерах, анализ местоположения зарождения пламени может требовать определенной ориентации камеры фотодетектора относительно лазера. Например, камера фотодетектора скорее может быть боковой (например, находиться сбоку или кромке) по отношению к лазеру, нежели выровненной поверх лазера. Как обсуждено ниже, эта конфигурация может достигаться в применениях лазерной системы для переносного инструментального средства.
В качестве еще одного примера, диагностируемый компонент внутри цилиндра может быть днищем поршня. В этом отношении, сканированное изображение днища поршня может сравниваться с хранимым опорным изображением днища поршня с подобной длительностью работы без ухудшения характеристик. Посредством сравнения изображений, оплавленное днище поршня может выявляться, и замена поршня может объективно определяться оператором.
В еще одном другом примере, спектральный анализ может использоваться для регулирования топливо-воздушного соотношения (AFR) сгорания. Здесь, процедура диагностики может выполняться в качестве части различных процедур бортовой диагностики (OBD). Спектральный анализ может использоваться для регулирования AFR независимо от основанного на датчике UEGO регулирования AFR. В качестве альтернативы, спектральный анализ может использоваться для дополнения или подтверждения действительности основанного на UEGO регулирования AFR. В этом отношении, сформированное изображение(ия) внутри цилиндра может быть указывающим место или временные характеристики стехиометрической точки сгорания. По существу, в любой заданный момент времени эксплуатации двигателя, может быть по меньшей мере один цилиндр, работающий лучше (или хуже), чем все остальные. В материалах настоящей заявки, захваченное изображение может использоваться для указания лямбда для каждого события сгорания в цилиндре Изображения могут захватываться и анализироваться на каждом одиночном событии сгорания или цилиндре. На основании захваченного изображения, может выполняться регулирование специфичного цилиндру точного топливо-воздушного соотношения. Точка стехиометрии для каждого цилиндра может изучаться и использоваться для коррекции ошибок AFR. Более точно, подача массы воздуха и временные характеристики впрыска топлива могут точно подстраиваться для каждого цилиндра. Посредством предоставления каждому цилиндру возможности точнее работать на лямбда вместо эксплуатации слишком обогащенным или слишком обедненным, может улучшаться общая экономия топлива двигателя.
Если принят входной сигнал оператора, указывающий ухудшение характеристик, то, на 718, в ответ на входной сигнал оператора, процедура включает в себя установку диагностического кода для указания ухудшения характеристик компонента или состояния. Диагностический код также может указывать, что требуется замена или ремонт компонента, при необходимости. Если ухудшение характеристик компонента не определено оператором, то, на 720, процедура указывает, что диагностируемые компонент или состояние не подвергнуты ухудшению характеристик, и что компонент находится в хорошей работоспособности.
С 718 и 720, процедура переходит на 722, на котором определяется, был ли принят новый запрос процедуры диагностики. Например, может определяться, были ли удовлетворены условия для еще одной процедуры диагностики, которая использует освещение от работы лазера на высокой мощности во время и вслед за тем, как было удовлетворено событие зажигания. Если да, процедура возвращается на 706, чтобы принимать входной сигнал касательно диагностики, которая должна выполняться, и компонента или состояния, которые должны диагностироваться. Процедура затем повторяется. Процедура по фиг. 7 повторяется с 706 по 722, чтобы завершать все процедуры диагностики, которые могут выполняться наряду с работой во втором диагностическом режиме. Если условия для конкретной процедуры диагностики не удовлетворены, или если выполнено достаточное количество (например, все) процедур диагностики Диагностического режима_2, процедура 700 может заканчиваться.
Несмотря на то, что вышеприведенная процедура изображает необходимость, чтобы оператор анализировал сформированное изображение(ия) и указывал, произошло ли ухудшение характеристик компонентов, в альтернативных вариантах осуществления, анализ может быть автоматическим. Например, вслед за захватом изображения, изображение может автоматически отображаться на устройстве отображения, и соответствующее опорное изображение также может автоматически отображаться на устройстве отображения. Контроллер затем может автоматически сравнивать изображения, не требуя входного сигнала оператора, чтобы выдавать результат успешного прохождения/несостоятельности процедуры диагностики. Определение успешного прохождения/несостоятельности может быть основано на подобии изображений (то есть, сформированного изображения и опорного изображения) с помощью более простого, в меньшей степени требующего большого объема вычислений сравнения пикселей, или расширенного, в большей степени требующего большого объема вычислений анализа изображений. В расширенном анализе изображений, объекты в пределах изображения могут идентифицироваться для более точной оценки исследуемых компонента или состояния.
Кроме того, будет приниматься во внимание, что, несмотря на то, что вышеприведенная процедура предлагает использование лазерной системы, присоединенной к двигателю в целях диагностики, в альтернативных примерах, лазерная система, включающая в себя задающий генератор лазерного излучения, линзы и фотодетектор, может быть сконфигурирована в качестве переносного лабораторного оборудования. В них, лазерная система может быть сконфигурирована в качестве ручного инструментального средства, которое может присоединяться к любому двигателю, такому как двигатель со свечами зажигания, или двигатель, который был снят с транспортного средства, и использоваться для анализа двигателя. В качестве примера, переносное инструментальное средство может размещаться во впускном коллекторе или впускном окне двигателя, чтобы осматривать и анализировать зарождение фронта пламени. Это может включать в себя разделение компонентов лазерной системы и расположение лазера и фотодетектора в разных местах впускного окна для данной процедуры диагностики.
Таким образом, предусмотрен способ для визуального контроля компонентов двигателя, не требующий разборки двигателя. Способ содержит приведение в действие лазерного устройства зажигания во время такта сжатия, чтобы инициировать сгорание в цилиндре; передачу изображения внутри цилиндра, сформированного после приведения в действие лазерного устройства зажигания, на устройство отображения транспортного средства, изображение формируется фотодетектором цилиндра с использованием света, вырабатываемого сгоранием в цилиндре; и на основании входного сигнала, принятого от оператора, установку диагностического кода, указывающего ухудшение характеристик. Здесь, фотодетектор присоединен к цилиндру, фотодетектор включает в себя линзу и камеру. Захваченное изображение внутри цилиндра является изображением компонента цилиндра или параметра сгорания. Способ дополнительно содержит отображение опорного изображения оператору на устройстве отображения транспортного средства, опорное изображение выбирается на основании компонента цилиндра или параметра сгорания. Указание ухудшения характеристик включает в себя указание ухудшения характеристик диагностируемых компонента цилиндра или параметра сгорания. Например, когда изображение внутри цилиндра является изображением зарождения пламени сгорания, указание ухудшения характеристик включает в себя указание ухудшения характеристик линзы фотодетектора.
В одном из примеров, система транспортного средства с гибридным приводом содержит двигатель, который включает в себя цилиндр; электродвигатель; устройство отображения в кабине транспортного средства; лазерную систему зажигания, присоединенную к головке цилиндра и выполненную с возможностью направлять световые импульсы в цилиндр; и систему фотодетектирования, присоединенную к лазерной системе зажигания и цилиндру для формирования изображений внутренней части цилиндра с использованием световых импульсов из лазерной системы зажигания. Система транспортного средства может включать в себя контроллер с постоянной памятью и машинно-читаемыми командами для приведения в действие лазерной системы зажигания во время такта сжатия, чтобы инициировать сгорание в цилиндре; отображения изображения внутри цилиндра, сформированного системе фотодетектирования вслед за приведением в действие, оператору транспортного средства на устройстве отображения; и дополнительного отображения опорного изображения, извлеченного из памяти контроллера, на устройстве отображения, опорное изображение основано на сформированном изображении внутри цилиндра. Приведение в действие устройства зажигания во время такта сжатия включает в себя приведение в действие лазерной системы зажигания выше порогового уровня мощности. Система фотодетектирования затем может захватывать изображения внутренней части цилиндра во время и вслед за событием сгорания с использованием света, вырабатываемого сгоранием в цилиндре. Контроллер затем может указывать ухудшение характеристик сгорания в цилиндре на основании входного сигнала оператора, принятого вслед за отображением. В качестве примера, система фотодетектирования может включать в себя ПЗС-камеру с линзой типа рыбий глаз. Отображение изображений может включать в себя беспроводную передачу изображений в пределах системы транспортного средства из системы фотодетектирования на устройство отображения. Контроллер может включать в себя дополнительные команды для настройки отдаваемой мощности электродвигателя при вводе в действие лазерной системы зажигания, чтобы поддерживать определенные число оборотов и нагрузку двигателя во время формирования изображения внутри цилиндра.
Таким образом, процедуры по фиг. 6-7 изображают способ использования лазерной системы зажигания на разных уровнях мощности и в разные моменты времени в течение цикла сгорания для диагностирования различных компонентов двигателя. Например, опробован способ для двигателя, который содержит приведение в действие лазерного устройства зажигания во время такта впуска на более низком уровне мощности, чтобы формировать первое изображение внутри цилиндра. приведение в действие лазерного устройства зажигания во время такта сжатия на более высоком уровне мощности, чтобы формировать второе изображение внутри цилиндра; и отображение каждого из первого и второго изображения внутри цилиндра оператору транспортного средства на устройстве отображения. Способ дополнительно включает в себя прием входного сигнала от оператора транспортного средства, указывающего ухудшение характеристик первого компонента цилиндра, на основании первого изображения, и входного сигнала, указывающего ухудшение характеристик второго, иного компонента цилиндра на основании второго изображения. Например, первый компонент цилиндра может включать в себя одно или более из топливной форсунки, впускного клапана цилиндра и поршневого кольца цилиндра наряду с тем, что второй компонент цилиндра может включать в себя одно или более из линзы и лазера лазерного устройства зажигания.
Далее, с обращением к фиг. 8, показан примерный способ 800 для выполнения процедуры диагностики, чтобы диагностировать различные компоненты внутри цилиндра с использованием основанных на освещении измерений положения вслед за испусканием лазерного импульса низкой мощности лазерной системой зажигания двигателя, такой как лазерная система по фиг. 1. Диагностический режим, изображенный на фиг. 8 предоставляет возможность для диагностирования различных компонентов на основании их абсолютных или относительных положений.
На 802, может подтверждаться, что двигатель не осуществляет сгорание (например, выключение двигателя). Например, может подтверждаться, что гибридная силовая установка находится в электрическом режиме работы или двигатель находится в режиме выключения холостого хода. Если нет, процедура переходит на 804, чтобы выполнять процедуры диагностики включенного двигателя, если условия диагностики посчитаны удовлетворенными, такую как процедуры, обсужденные на фиг. 6-7. Если двигатель не осуществляет сгорание, то, на 806, определяется, был ли выбран третий диагностический режим (Режим_3, Mode_3). Третий диагностический режим может выбираться, если удовлетворены заданные условия эксплуатации. Например, могут подтверждаться условия отсутствия сгорания в двигателе. В качестве альтернативы, пороговая длительность или расстояние могут истечь после последнего повторения третьего диагностического режима. При работе в третьем диагностическом режиме, лазерные импульсы могут испускаться в диапазоне более низкой мощности в каждый цилиндр без сгорания. По существу, множество процедур диагностики, каждая направлена на один или более компонентов цилиндра, могут выполняться во время работы в третьем диагностическом режиме.
Если третий диагностический режим не выбран, процедура переходит на 808, чтобы деактивировать лазерную систему зажигания. Если третий диагностический режим подтвержден, то, на 810, процедура включает в себя прием входного сигнала касательно выбранной процедуры диагностики. Как обсуждено выше, различные процедуры диагностики, направленные на различные компоненты цилиндра, могут выполняться во время работы в третьем диагностическом режиме. Контроллер может принимать входной сигнал от оператора транспортного средства, к примеру, через устройство 135 отображения по фиг. 2, касательно компонента, который должен диагностироваться в третьем режиме работы. Компоненты или условия внутри цилиндра, диагностируемые во время работы в третьем диагностическом режиме, могут включать в себя, в качестве неограничивающих примеров, коленчатый вал цилиндра и распределительный вал цилиндра. В некоторых примерах, на основании компонента, который должен диагностироваться, могут меняться количество, частота, ориентация и уровень мощности лазерных импульсов, испускаемых лазерной системой.
На 812, после приема входного сигнала, процедура включает в себя приведение в действие лазерного устройства зажигания в каждом цилиндре. Более точно, лазерное устройство зажигания (например, лазерная система по фиг. 1) может эксплуатироваться во время такта впуска цилиндра на более низкой мощности. Дополнительно или по выбору, лазерное устройство зажигания может приводиться в действие во время такта выпуска каждого цилиндра двигателя. Приведение в действие на более низкой мощности включает в себя приведение в действие более низкой мощности, чем пороговая мощность, требуемая для инициации сгорания в цилиндре. Посредством приведения в действие лазерного устройства зажигания на более низкой мощности во время такта впуска, лазерные импульсы могут направляться в цилиндр, чтобы осуществлять планарную развертку цилиндра во время такта впуска. В силу лазера, быстрой развертки лазером внутренней части цилиндра во время такта впуска, цилиндр может освещаться, как будто электрической лампочкой, и освещение может использоваться для захвата изображений внутренней части цилиндра, тем самым, предоставляя оператору возможность наблюдать и оценивать внутреннюю часть цилиндра без необходимости снятия компонентов для визуального контроля.
На 814, процедура включает в себя идентификацию положения поршня в каждом цилиндре на основании приведения в действие лазерного устройства зажигания. Идентификация положения поршня в каждом цилиндре включает в себя, для каждого цилиндра, считывание света, отраженного от верхней поверхности поршня, и оценку положения поршня на основании времени, истекшего между приведением в действие лазерного устройства зажигания и считыванием света. Например, расположение поршня может определяться посредством способов модуляции частоты с использованием частотно модулированных лазерных пучков с периодически повторяющимся линейным изменением частоты.
На 816, процедура дополнительно включает в себя идентификацию положения клапанов цилиндра в каждом цилиндре на основании приведения в действие лазерного устройства зажигания. В одном из примеров, клапан цилиндров является впускным клапаном. В других примерах, клапан цилиндра может быть выпускным клапаном. Идентификация положения клапана цилиндра включает в себя, для каждого цилиндра, направление света, отраженного от клапана цилиндра. Как конкретизировано со ссылкой на фиг. 4-5, лазерная система может использоваться для определения положений клапанов в пределах цилиндра в дополнение к положению поршня. В этом отношении, открывание впускного клапана может логически выводиться в ответ на становление света из лазерной системы по меньшей мере частично блокированным от достижения верха поршня цилиндра. Так как количество отраженного света уменьшено по сравнению с количеством света, отраженного от верхней поверхности поршня, когда испускаемые импульсы не блокируются, контроллер может учитывать такие различия и использовать информацию для определения, что впускной клапан данного цилиндра открыт. На основании порядка операций клапанов в пределах ездового цикла, контроллер также может делать вывод, что выпускной клапан цилиндра закрыт. В альтернативных примерах, падение количества света, отраженного от поверхности поршня, во время работы лазера в течение такта выпуска может использоваться, чтобы логически выводить открывание выпускного клапана (и закрывание впускного клапана).
В вариантах осуществления, где впускной клапан и/или выпускной клапан присоединены к соответственным кулачкам, данные измерения освещенности также могут использоваться для логического вывода положения кулачков и распределительного вала(ов), присоединенных к клапанам. Например, для каждого цилиндра, контроллер может считывать свет, отраженный от цилиндра, и оценивать положение кулачка для впускного клапана цилиндра на основании времени, истекшего между приведением в действие лазерного устройства зажигания и считыванием света.
На 818, процедура включает в себя определение положения коленчатого вала для двигателя на основании измерения положения поршня, выполняемого в каждом цилиндре, на 814. Подобным образом, на 820, процедура включает в себя определение положения коленчатого вала для двигателя на основании измерения клапана цилиндра (впускного или выпускного клапана) или кулачка (кулачка для впускного клапана или выпускного клапана), выполняемого для каждого цилиндра на 816. С 818, процедура переходит на каждый из 822, 832 и 842, чтобы указывать ухудшение характеристик коленчатого вала двигателя на основании положения поршня каждого цилиндра (на 822), чтобы указывать ухудшение характеристик распределительного вала двигателя на основании положения клапана каждого цилиндра (на 832), и/или чтобы указывать неправильное относительное положение коленчатого вала относительно распределительного вала на основании измерений положения поршня и клапанов.
Более точно, на 822, процедура включает в себя сравнение относительного положения поршней между цилиндрами двигателя (в качестве определенного на 818). Например, положение поршня первого цилиндра может определяться и использоваться для оценки положения поршня оставшихся цилиндров двигателя (например, на основании их порядка работы и конфигурации двигателя).
По существу, относительное положение может захватываться статически (как изображено) или динамически. Например, если лазер приводится в действие в режиме низкой энергии, в то время как двигатель движется, свет из лазерной системы может отражаться от верха поршня цилиндра, и отраженный свет будет иметь иную частоту относительно излученного исходного света. Этот обнаруживаемый частотный сдвиг известен как эффект Доплера и имеет известную зависимость от скорости поршня, если поршень перемещается. Таким образом, измерение освещенности может использоваться для определения положения и скорости поршня. В дополнение к использованию информации о положении для идентификации ухудшения характеристик, положение и скорость поршня также могут использоваться, чтобы координировать временные характеристики событий зажигания и впрыска топливо/воздушной смеси. Например, информация о положении может использоваться для определения, какой цилиндр работает первым после перезапуска двигателя из состояния выключения холостого хода.
На 824, может определяться, есть ли расхождение между относительным положением поршней цилиндров. Например, ожидаемое положение поршней цилиндра может сравниваться с действующими оцененными значениями. По существу, на основании положения поршня в данном цилиндре, могут логически выводиться положения поршней в оставшихся цилиндрах двигателя (например, на основании порядка работы цилиндров и конфигурации цилиндров двигателя). Таким образом, могут рассчитываться относительные положения и относительные различия в положениях поршней. Если есть отклонение, на 826, может указываться ухудшение характеристик коленчатого вала. В одном из примеров, ухудшение характеристик коленчатого вала может указываться на основании разности между положением поршня первого цилиндра относительно второго цилиндра, являющейся более высокой, чем пороговая величина. Указание ухудшения характеристик, например, может включать в себя установку диагностического кода, чтобы указывать, что коленчатый вал покороблен. В альтернативном примере, контроллер может устанавливать диагностический код, чтобы указывать, что коленчатый вал сломан. В дополнительных примерах, ухудшение характеристик коленчатого вала следствие покоробленного коленчатого вала, может отличаться от ухудшения характеристик коленчатого вала вследствие сломанного коленчатого вала. В качестве примера, если коленчатый вал был сломан, положение по меньшей мере некоторых из цилиндров может не изменяться. В сравнение, если коленчатый вал покороблен, все цилиндры все еще находились бы в движении, но непредвиденное смещение наблюдается между установкой фаз распределения/положением всех цилиндров. Если ухудшение характеристик коленчатого вала не определено, процедура может заканчиваться.
Будет принято во внимание, что, несмотря на то, что процедура по фиг. 8 изображает транспортное средство, находящееся в режиме без сгорания, это может не быть ограничивающим состоянием. В некоторых вариантах осуществления процедуры по фиг. 8, различные основанные на положении процедуры диагностики могут инициироваться, в то время как транспортное средство находится в режиме со сгоранием. Например, диагностика коленчатого вала может выполняться, в то время как двигатель осуществляет сгорание, так что двигатель может поворачиваться в качестве части процедуры диагностики, с тем, чтобы лучше проводить различие покоробленного коленчатого вала от сломанного коленчатого вала.
На 832, процедура включает в себя сравнение относительного положения клапанов между цилиндрами двигателя (в качестве определенного на 820). Поскольку положение кулачка (например, кулачка для впускного клапана) непосредственно соотносится с соответствующим положением клапана (например, впускного клапана), процедура дополнительно может сравнивать относительное положение кулачков цилиндров (в качестве определенного на 816). Например, положение впускного клапана или кулачка для впускного клапана первого цилиндра может определяться и использоваться для оценки положения впускного клапана или кулачка для впускного клапана оставшихся цилиндров двигателя (например, на основании их порядка работы, конфигурации двигателя и такта цилиндра). По существу, относительное положение может захватываться статически или динамически, как обсуждено выше. В дополнение к использованию информации о положении для идентификации ухудшения характеристик, измерение положения клапана или кулачка также могут использоваться, чтобы координировать временные характеристики событий зажигания и впрыска топливо/воздушной смеси. Например, информация о положении может использоваться для определения, какой цилиндр работает первым, и какой цилиндр первым снабжается топливом. Например, цилиндр с открытым впускным клапаном может определяться находящимся в такте впуска и может принимать топливо во время перезапуска двигателя из состояния выключения холостого хода.
На 834, может определяться, есть ли расхождение между относительным положением кулачков или клапанов цилиндров. Например, ожидаемое положение клапанов или кулачков цилиндра может сравниваться с действующими оцененными значениями. По существу, на основании положения впускного клапана в данном цилиндре, может логически выводиться положение впускного клапана в оставшихся цилиндрах двигателя (например, на основании порядка работы цилиндров и конфигурации цилиндров двигателя). Таким образом, могут рассчитываться относительные положения и относительные различия клапана или кулачка. Если есть отклонение, на 836, может указываться ухудшение характеристик распределительного вала. В одном из примеров, ухудшение характеристик распределительного вала может указываться на основании разности между положением клапана первого цилиндра относительно второго цилиндра, являющейся более высокой, чем пороговая величина. В еще одном примере, где клапаны приводятся в действие независимо, может определяться, находится ли измеренное положение клапана данного цилиндра там, где ожидается, что положение клапана должно быть. Например, может определяться, указывает ли положение клапана открытый впускной клапан, где впускной клапан цилиндра побуждался в открытое положение. В качестве альтернативы, может определяться, указывает ли положение клапана закрытый впускной клапан, где впускной клапан цилиндра побуждался в открытое положение. Указание ухудшения характеристик, например, может включать в себя установку диагностического кода, чтобы указывать, что распределительный вал покороблен или сломан. В альтернативном примере, контроллер может устанавливать диагностический код, чтобы указывать, чтобы электрическая система кулачкового привода, присоединенная к распределительному валу, подвергнута ухудшению характеристик. В дополнительных примерах, ухудшение характеристик распределительного вала следствие покоробленного распределительного вала, может отличаться от ухудшения характеристик распределительного вала вследствие сломанного распределительного вала. В качестве примера, если распределительный вал был сломан, по меньшей мере некоторые цилиндры могут не иметь события кулачка, когда имеют другие. В сравнение, если бы распределительный вал был покороблен, все цилиндры имели бы события кулачка, но непредвиденное смещение может наблюдаться между временными характеристиками событий кулачка всех цилиндров. В случае теоретических систем приводов, не имеющих вала, измерение положения впускного клапана сравнивалось бы с командным положением впускного клапана для каждого цилиндра, чтобы идентифицировать ухудшение характеристик. Если ухудшение характеристик распределительного вала не определено, процедура может заканчиваться.
Будет принято во внимание, что, несмотря на то, что процедура по фиг. 8 изображает транспортное средство, находящееся в режиме без сгорания, это может не быть ограничивающим состоянием. В некоторых вариантах осуществления процедуры по фиг. 8, различные основанные на положении процедуры диагностики могут инициироваться, в то время как транспортное средство находится в режиме со сгоранием. Например, диагностика распределительного вала может выполняться, в то время как двигатель осуществляет сгорание, так что двигатель может поворачиваться в качестве части процедуры диагностики, с тем, чтобы лучше проводить различие покоробленного распределительного вала от сломанного распределительного вала.
На 842, процедура включает в себя сравнение относительного положения коленчатого вала с положением распределительного вала. В качестве примера, положение коленчатого вала. определенное на основании положения поршня всех цилиндров двигателя, может сравниваться с положением распределительного вала, определенным на основании положения клапана цилиндров двигателя. Например, положение поршня для каждого цилиндра, в качестве определенного на 814, может сравниваться с положением впускного клапана для того же самого данного цилиндра, как определено на 816. В дополнение, на основании положения поршня для цилиндра, может оцениваться такт цилиндра и, в силу этого, положение клапанов цилиндра. Действующее и ожидаемые значения затем могут сравниваться. Например, может определяться положение поршня первого цилиндра, используемое для оценки положения впускного клапана или кулачка для впускного клапана данного первого цилиндра.
На 844, может определяться, есть ли расхождение между оцененным положением клапана и ожидаемым положением клапана в качестве определенного на основании положения поршня. Если есть отклонение, на 846, может указываться неправильное относительное расположение коленчатого вала цилиндра относительно распределительного вала. Например, неправильное относительное расположение может указываться на основании отклонения оцененного положения клапана цилиндра от ожидаемого положения клапана, при этом, ожидаемое положение клапана было основано на оцененном положении поршня для того же самого цилиндра. Здесь, положение клапана цилиндра может быть положением впускного клапана цилиндра. Как обсуждено выше, положение поршня цилиндра идентифицируется на основании времени, требуемого для детектирования лазерного сигнала, сформированного в лазерном устройстве зажигания двигателя, который должен отражаться от поршня цилиндра, наряду с тем, что положение клапана цилиндра идентифицируется на основании времени, требуемого для детектирования лазерного сигнала, сформированного в лазерном устройстве зажигания двигателя, который должен отражаться от клапана цилиндра.
В еще одном примере, неправильное относительное расположение может указываться на основании разности между оцененным положением коленчатого вала и оцененным положением распределительного вала, находящейся выше, чем пороговая величина. Например, на основании измеренного положения впускного клапана или кулачка для впускного клапана (например, на основании впускного клапана/кулачка для впускного клапана, находящегося в исходном положении) всех цилиндров двигателя, может оцениваться положение распределительного вала (например, может определяться исходное положение распределительного вала). Затем, на основании положения распределительного вала, может определяться положение, соотносящееся с положением распределительного вала. Двигатель может иметь допуск до пороговой величины изменения сдвига коленчатого вала от исходного положения (например, до 4 градусов). Если положение коленчатого вала смещено больше, чем на 4 градуса, может определяться неправильное относительное расположение. В ответ на расхождение, контроллер может устанавливать диагностический код на 846. В ответ на указание неправильного относительного расположения, контроллер может применять смещение к положению кулачка до тех пор, пока не восстановлено правильное относительное расположение валов.
Таким образом, основанные на освещении измерения положений могут использоваться для диагностирования распределительного вала двигателя, коленчатого вала цилиндра, впускных клапанов цилиндра, выпускных клапанов цилиндра и кулачков для впускных и выпускных клапанов цилиндра.
Далее, с обращением к фиг. 9, показана примерная процедура 900 для конфигурации факела распыла форсунки. В одном из примеров, процедура 900 может быть процедурой диагностики, выполняемой в качестве части первого диагностического режима (Режим_1), как описано на фиг. 6.
На 902, процедура включает в себя подтверждение, что была выбрана диагностика форсунки. Например, может подтверждаться, что двигатель находится в первом диагностическом режиме. Иначе, процедура может заканчиваться.
В некоторых вариантах осуществления, диагностика форсунки может выполняться с использованием лазерной системы, сконфигурированной в качестве переносного инструментального средства. Когда в применении переносного инструментального средства, процедура включает в себя, по выбору, на 904, установку лазера и фотодетектора (например, ПЗС-камеры) во впускном коллекторе двигателя. Позиционирование лазера и камеры во впускном коллекторе может меняться в зависимости от того, является ли диагностируемая топливная форсунка топливной форсункой непосредственного впрыска или топливной форсункой оконного впрыска. Например, если диагностируется конфигурация факела распыла топливной форсунки непосредственного впрыска, лазер и камера могут быть размещены на одной линии, к примеру, в местоположении свечи зажигания. В сравнение, если диагностируется конфигурация факела распыла топливной форсунки оконного впрыска, лазер и камера могут быть скомпонованы под углом друг к другу, к примеру, с лазером и камерой во впускном окне на линии факела распыла форсунки. Будет принято во внимание, что лазеру и камере может быть необходимо обоим находиться на линии визирования с конфигурацией факела распыла форсунки. В одном из примеров, это требование может диктовать наличие в распоряжении второго набора лазеров низкой мощности во впускных окнах для двигателей с оконным впрыском.
На 906, процедура включает в себя настройку отдаваемой мощности электродвигателя транспортного средства с гибридным приводом, в котором присоединен двигатель, с тем, чтобы поддерживать определенное состояние числа оборотов-нагрузки двигателя во время процедуры диагностики. Например, отдаваемая выходная мощность электродвигателя может настраиваться, чтобы поддерживать опорные число оборотов-нагрузку двигателя, которые использовались во время последнего повторения (или всех предыдущих повторений) процедуры диагностики конфигурации факела распыла форсунки.
На 908, процедура включает в себя приведение в действие лазерного устройства зажигания на более низком уровне мощности, с тем чтобы направлять лазерные импульсы в цилиндр для осуществления планарной развертки цилиндра во время такта впуска цилиндра лазерными импульсами, имеющими мощность, достаточную для освещения цилиндра, но не достаточную для инициации сгорания в цилиндре. На 910, процедура включает в себя развертку лазером в плоскости на траекторию факела распыла топливной форсунки в определенные моменты времени после впрыска топлива топливной форсункой. Например, лазер может зажигаться в быстрой последовательности, чтобы обеспечивать планарную развертку или лазерную дугу, на траектории факела распыла форсунки.
На 912, контроллер может принимать изображения, захваченные фотодетектором (например, ПЗС-камерой) во время работы лазера. По существу, фотодетектор мог захватывать изображения с использованием света, вырабатываемого посредством эксплуатации лазера в режиме более низкой мощности. Изображения могут представлять коническое сечение конфигурации факела распыла топливной форсунки. Примерные изображения конфигурации факела распыла топливной форсунки показаны и обсуждены со ссылкой на фиг. 10. На 914, изображения могут отображаться оператору, такому как специалист по обслуживанию или механик. В одном из примеров, изображения могут отображаться на устройстве отображения на центральной консоли транспортного средства. В качестве альтернативы, изображения могут отображаться на устройстве отображения, присоединенном к переносному инструментальному средству диагностики.
На 916, контроллер может извлекать и отображать опорное изображение ожидаемой конфигурации факела распыла форсунки. Опорное изображение может автоматически извлекаться и отображаться на основании захваченного изображения (на 912) или на основании выбора процедуры диагностики форсунки (на 902). В качестве альтернативы, опорное изображение может извлекаться по приему входного сигнала от оператора транспортного средства, к примеру, через (сенсорное интерактивное) устройство отображения. Опорное изображение может включать в себя изображение данной топливной форсунки, диагностированной в заданных условиях опорных числа оборотов-нагрузки двигателя, на котором было определено отсутствие ухудшения характеристик форсунки. В качестве альтернативы, опорное изображение может включать в себя изображение соответствующей топливной форсунки (например, аналогичной топливной форсунки оконного или непосредственного впрыска), диагностированной ранее в заданных условиях опорных числа оборотов-нагрузки двигателя, на котором было определено отсутствие ухудшения характеристик форсунки. Таким образом, сформированное изображение и опорное изображение могут быть представлены оператору транспортного средства для сравнительного анализа.
На 918, может определяться, был ли принят входной сигнал оператора, указывающий ухудшение характеристик форсунки. Например, оператор может сравнивать сформированное изображение с опорным изображением, чтобы выяснять, является ли конфигурация факела распыла форсунки такой, как требуется быть. Фиг. 10 показывает изображения конфигурации факела распыла форсунки, захваченные в лазерной дуге фотодетектором, присоединенным к лазерной системе. На 1000, показана ожидаемая конфигурация факела распыла. Более точно, 1000 может быть опорным изображением, представляющим конфигурацию факела распыла топливной форсунки, захваченную во время условий опорных числа оборотов-нагрузки двигателя, в то время как форсунка не была подвергнута ухудшению характеристик. В сравнение, 1002 показывает ухудшенную конфигурацию факела распыла форсунки. Поскольку конус факела распыла на 1002 не имеет коническую форму (сравните с имеющим конусную форму конусом факела распыла по 1000) и имеет часть конического сечения, отсутствующую или скошенную, на основании изображений, оператор может определять, что топливная форсунка подвергнута ухудшению характеристик. Например, форсунка может определяться засоренной.
Если входной сигнал оператора указывает ухудшение характеристик топливной форсунки, на 920, контроллер может устанавливать диагностический код, чтобы указывать ухудшение характеристик. Контроллер также может запрашивать замену топливной форсунки. Если входной сигнал не принят, контроллер может указывать, на 922, что топливная форсунка не подвергнута ухудшению характеристик. По выбору, если определено отсутствие ухудшения характеристик, контроллер может сохранять изображение, захваченное во время данного повторения процедуры диагностики топливной форсунки, в памяти контроллера для использования опорного изображения во время более позднего повторения процедуры диагностики.
Далее, с обращением к фиг. 11, показана примерная процедура 1100 для диагностирования конфигураций потока воздуха цилиндра. В одном из примеров, процедура 1100 может быть процедурой диагностики, выполняемой в качестве части первого диагностического режима (Режим_1), как описано на фиг. 6. Более того, процедура диагностики может выполняться с использованием лазерной системы, сконфигурированной в качестве переносного инструментального средства.
На 1102, процедура включает в себя подтверждение, что была выбрана диагностика потока воздуха. Например, может подтверждаться, что двигатель находится в первом диагностическом режиме. Иначе, процедура может заканчиваться. На 1104, процедура включает в себя подачу воздуха высокой влажности в систему впуска воздуха. Например, водяные мелкие брызги могут впрыскиваться или вводиться в систему впуска воздуха (или непосредственно во впускной коллектор). В альтернативных примерах, вместо воздуха высокой влажности, туман может подаваться в систему впуска воздуха двигателя.
На 1106, процедура включает в себя приведение в действие лазера в режиме более низкой мощности. Как обсуждено ранее, лазерная система приводится в действие, чтобы направлять лазерные импульсы в цилиндр для осуществления планарной развертки цилиндра во время такта впуска цилиндра лазерными импульсами, имеющими мощность, достаточную для освещения цилиндра, но не достаточную для инициации сгорания в цилиндре. На 1108, процедура включает в себя развертку лазером в плоскости на траекторию потока воздуха цилиндра в определенные моменты времени после открывания впускного клапана (IVO). Например, лазер может зажигаться в быстрой последовательности, чтобы обеспечивать планарную развертку по цилиндру во время такта впуска.
В некоторых примерах, клапан управления завихрением или клапан управления движением заряда во впускном окне выше по потоку от впускного клапана, может эксплуатироваться во время ввода влажного воздуха или тумана, с тем, чтобы выделять завихряющееся движение потока воздуха, принимаемого в цилиндре во время такта впуска.
На 1110, контроллер может принимать изображения, захваченные фотодетектором (например, ПЗС-камерой) во время работы лазера. По существу, фотодетектор мог захватывать изображения с использованием света, вырабатываемого посредством эксплуатации лазера в режиме более низкой мощности. Изображения могут представлять конфигурации потока воздуха в цилиндре. Более точно, развертка камеры и лазера могут подсвечивать конфигурацию потока воздуха посредством визуализации паров воды (из воздуха высокой влажности), конденсирующихся в цилиндре по мере того, как они встречаются с низким давлением во время такта впуска.
На 1112, захваченные изображения могут отображаться оператору, такому как специалист по обслуживанию или механик. В одном из примеров, изображения могут отображаться на устройстве отображения на центральной консоли транспортного средства. В качестве альтернативы, изображения могут отображаться на устройстве отображения, присоединенном к переносному инструментальному средству диагностики.
На 1114, контроллер может извлекать и отображать одно или более опорных изображений ожидаемой конфигурации потока воздуха цилиндра. Опорное изображение может автоматически извлекаться и отображаться на основании захваченного изображения (на 1110) или на основании выбора процедуры диагностики потока воздуха (на 1102). В качестве альтернативы, опорное изображение может извлекаться по приему входного сигнала от оператора транспортного средства, к примеру, через (сенсорное интерактивное) устройство отображения. Опорное изображение может включать в себя изображение конфигурации потока воздуха, захваченное ранее, когда не было определено ухудшение характеристик впускного клапана или потока воздуха. По выбору, опорное изображение могло быть захвачено во время эксплуатации двигателя в состоянии опорных числа оборотов-нагрузки двигателя, или в том же состоянии числа оборотов-нагрузки двигателя, в котором изображения захватывались на данный момент. По существу, при отсутствии ухудшения характеристик потока воздуха (такого как вследствие ухудшения характеристик впускного клапана), введенный влажный воздух или туман может формировать спиралевидную конфигурацию в цилиндре, обусловленную взаимодействием влажного воздуха или тумана с низким давлением, встреченным в цилиндре во время такта впуска. Таким образом, опорное изображение может включать в себя спиралевидную конфигурацию, такую как завихрение или круговорот. Таким образом, сформированное изображение и опорное изображение могут быть представлены оператору транспортного средства для сравнительного анализа.
На 1116, может определяться, был ли принят входной сигнал оператора, указывающий ухудшение характеристик потока воздуха. Например, оператор может сравнивать сформированное изображение с опорным изображением, чтобы выяснять, является ли конфигурация потока воздуха спиралевидной, как и требуется быть. Если захваченное изображение изображает турбулентность в произвольных частях цилиндра, оператор может делать выводи указывать, что поток воздуха в цилиндре ухудшен. Если входной сигнал оператора указывает ухудшение характеристик потока воздуха цилиндра, на 1118, контроллер может устанавливать диагностический код для указания ухудшения характеристик потока воздуха вследствие возможного ухудшения характеристик впускного клапана. Например, контроллер может указывать, что есть потенциальное нарастание вещества на впускном клапане. В качестве альтернативы, контроллер может указывать, что клапан управления завихрением подвергнут ухудшению характеристик. Контроллер может соответственно запрашивать, чтобы выполнялись управляющие воздействия, такие как осуществление опережения установки фаз распределения кулачков для впускных клапанов, чтобы компенсировать ухудшенный поток через клапан. Если входной сигнал не принят, контроллер может указывать, на 1120, что поток воздуха (а потому, впускной клапан) не ухудшен. По выбору, если определено отсутствие ухудшения характеристик, контроллер может сохранять изображение, захваченное во время данного повторения процедуры диагностики потока воздуха, в памяти контроллера для использования опорного изображения во время более позднего повторения процедуры диагностики.
Далее, с обращением к фиг. 12, показана примерная процедура 1200 для диагностирования утечки охлаждающей жидкости в цилиндр. В одном из примеров, процедура 1200 может быть процедурой диагностики, выполняемой в качестве части первого диагностического режима (Режим_1), как описано на фиг. 6. Более того, процедура диагностики может выполняться с использованием лазерной системы, сконфигурированной в качестве переносного инструментального средства.
На 1202, процедура включает в себя подтверждение, что была выбрана диагностика потока охлаждающей жидкости. Например, может подтверждаться, что двигатель находится в первом диагностическом режиме. Иначе, процедура может заканчиваться. На 1204, процедура включает в себя приведение в действие лазера в режиме более низкой мощности. Как обсуждено ранее, лазерная система приводится в действие, чтобы направлять лазерные импульсы в цилиндр, имеющие мощность, достаточную для освещения цилиндра, но не достаточную для инициации сгорания в цилиндре. На 1206, процедура включает в себя использование лазерных импульсов для планарной развертки цилиндра во время такта впуска цилиндра. Дополнительно, на 1206, процедура включает в себя приведение в действие лазера в режиме более низкой мощности, чтобы вновь осуществлять планарную развертку цилиндра, после сгорания в цилиндре, во время такта выпуска данного цикла цилиндра. Например, лазер может развертываться по цилиндру в определенные моменты времени после открывания впускного клапана (IVO) и перед закрыванием выпускного клапана (EVC). Например, лазер может зажигаться в быстрой последовательности, чтобы обеспечивать планарную развертку по цилиндру во время такта впуска и такта выпуска.
На 1208, контроллер может принимать изображения, захваченные фотодетектором (например, ПЗС-камерой) во время работы лазера. По существу, фотодетектор мог захватывать изображения с использованием света, вырабатываемого посредством эксплуатации лазера в режиме более низкой мощности. Изображения, захваченные в такте впуска, могут представлять наличие или отсутствие проникновения охлаждающей жидкости в цилиндр во время такта впуска вслед за событием открывания впускного клапана. Изображения, захваченные в такте выпуска, могут представлять собой наличие или отсутствие белого дыма в отработавших газах цилиндра вслед за сгоранием какого-либо количества протекшей охлаждающей жидкости.
На 1210, захваченные изображения могут отображаться оператору, такому как специалист по обслуживанию или механик. В одном из примеров, изображения могут отображаться на устройстве отображения на центральной консоли транспортного средства. В качестве альтернативы, изображения могут отображаться на устройстве отображения, присоединенном к переносному инструментальному средству диагностики.
На 1212, контроллер может извлекать и отображать одно или более опорных изображений ожидаемой конфигурации потока воздуха цилиндра. Опорное изображение может автоматически извлекаться и отображаться на основании захваченного изображения (на 1208) или на основании выбора процедуры диагностики потока охлаждающей жидкости (на 1202). В качестве альтернативы, опорное изображение может извлекаться по приему входного сигнала от оператора транспортного средства, к примеру, через (сенсорное интерактивное) устройство отображения. Опорное изображение может включать в себя изображение ожидаемого потока охлаждающей жидкости и формирования дыма отработавших газов, захваченное ранее, когда было определено отсутствие утечки охлаждающей жидкости в данный цилиндр. По выбору, опорное изображение могло быть захвачено во время эксплуатации двигателя в состоянии опорных числа оборотов-нагрузки двигателя, или в том же состоянии числа оборотов-нагрузки двигателя, в котором изображения захватывались на данный момент. По существу, при наличии проникновения охлаждающей жидкости, могут быть видны поток или пары охлаждающей жидкости, поступающие в цилиндр с нижней части поршня во время такта впуска. В таком случае, может быть видна охлаждающая жидкость, формирующая чрезмерный белый дым в такте выпуска, обусловленный сгоранием охлаждающей жидкости во время события сгорания в цилиндре. Таким образом, сформированное изображение и опорное изображение могут быть представлены оператору транспортного средства для сравнительного анализа.
На 1214, может определяться, был ли принят входной сигнал оператора, указывающий проникновение охлаждающей жидкости. Например, оператор может сравнивать сформированное изображение с опорным изображением, чтобы выяснять, протекла ли охлаждающая жидкость в цилиндр. Если входной сигнал оператора указывает ухудшение характеристик потока воздуха цилиндра, на 1216, контроллер может устанавливать диагностический код для указания ухудшения характеристик потока охлаждающей жидкости и утечки охлаждающей жидкости в цилиндр вследствие возможного ухудшения характеристик поршневых колец. Если входной сигнал не принят, контроллер может указывать, на 1218, что поток охлаждающей жидкости (а потому, поршневое кольцо цилиндра) не подвергнут ухудшению характеристик. По выбору, если определено отсутствие ухудшения характеристик, контроллер может сохранять изображение, захваченное во время данного повторения процедуры диагностики потока охлаждающей жидкости, в памяти контроллера для использования опорного изображения во время более позднего повторения процедуры диагностики.
Далее, с обращением к фиг. 13, показана примерная процедура 1300 для диагностирования собирающей линзы, присоединенной к лазерной системе цилиндра. В одном из примеров, процедура 1300 может быть процедурой диагностики, выполняемой в качестве части второго диагностического режима (Режим_2), как описано на фиг. 7. Более того, процедура диагностики может выполняться с использованием лазерной системы, сконфигурированной в качестве переносного инструментального средства.
На 1302, процедура включает в себя подтверждение, что была выбрана диагностика линзы. Например, может подтверждаться, что двигатель находится во втором диагностическом режиме. Иначе, процедура может заканчиваться. На 1304, процедура включает в себя приведение в действие лазера в режиме более высокой мощности. Как обсуждено ранее, лазерная система приводится в действие, чтобы направлять лазерные импульсы в цилиндр, имеющие достаточную для инициации сгорания в цилиндре и большую мощность, чем требуется только для освещения цилиндра. Лазерные импульсы также могут использоваться для осуществления планарной развертки цилиндра во время такта сжатия цилиндра.
На 1306, контроллер может захватывать изображения внутри цилиндра с помощью фотодетектора лазерной системы с использованием света, вырабатываемого во время сгорания в цилиндре. На 1308, контроллер может принимать изображения, захваченные фотодетектором (например, ПЗС-камерой) во время работы лазера. По существу, фотодетектор мог захватывать изображения с использованием света, вырабатываемого во время сгорания в цилиндре. Изображения могут представлять фронт пламени во время события сгорания в цилиндре. На 1308, захваченные изображения могут отображаться оператору, такому как специалист по обслуживанию или механик. В одном из примеров, изображения могут отображаться на устройстве отображения на центральной консоли транспортного средства. В качестве альтернативы, изображения могут отображаться на устройстве отображения, присоединенном к переносному инструментальному средству диагностики.
На 1310, на основании захваченных изображений, может определяться место зарождения пламени. Например, на основании интенсивности захваченных изображений, может определяться местоположение на поверхности поршня или стенки цилиндра, где зарождался фронт пламени. По существу, после того, как пламя инициировано с помощью лазерного зажигания, и дальше после того, как лазерная система использует собирающую линзу для направления лазерного импульса в цилиндр для инициации сгорания, зарождение пламени также может соотносится с фокусной точкой линзы. Таким образом, на основании принятого изображения, контроллер может определять фокусную точку линзы, присоединенной к лазерной системе.
На 1312, контроллер может извлекать и отображать одно или более опорных изображений ожидаемых зарождения и продвижения фронта пламени. Опорное изображение может автоматически извлекаться и отображаться на основании захваченного изображения (на 1306) или на основании выбора процедуры диагностики линзы (на 1302). В качестве альтернативы, опорное изображение может извлекаться по приему входного сигнала от оператора транспортного средства, к примеру, через (сенсорное интерактивное) устройство отображения. Опорное изображение может включать в себя изображение ожидаемого зарождения и продвижения фронта пламени. По выбору, опорное изображение могло быть захвачено во время эксплуатации двигателя в состоянии опорных числа оборотов-нагрузки двигателя, или в том же состоянии числа оборотов-нагрузки двигателя, в котором изображения захватывались на данный момент. По существу, если линза смещена, место зарождения пламени может быть скошено в сторону и может не соотноситься с ожидаемым местом зарождения пламени. Таким образом, сформированное изображение и опорное изображение могут быть представлены оператору транспортного средства для сравнительного анализа.
На 1314, может определяться, был ли принят входной сигнал оператора, указывающий смещение линзы или неправильное место зарождения пламени. Например, оператор может сравнивать сформированное изображение с опорным изображением, чтобы выяснять, зарождалось ли пламя около границы цилиндра. Если входной сигнал оператора указывает ухудшение характеристик зарождения пламени, на 1316, контроллер может устанавливать диагностический код для указания ухудшения характеристик зарождения пламени вследствие возможного смещения линзы лазерной системы. Контроллер дополнительно может указывать, что требуется настройка (например, повторное выравнивание) линзы. Если входной сигнал не принят, контроллер может указывать, на 1318, что зарождение пламени и компоновка линзы не подвергнуты ухудшению характеристик. По выбору, если определено отсутствие ухудшения характеристик, контроллер может сохранять изображение, захваченное во время данного повторения процедуры диагностики линзы, в памяти контроллера для использования опорного изображения во время более позднего повторения процедуры диагностики.
Будет принято во внимание, что, в кроме того дополнительных примерах, одна или более из описанных выше процедур может настраиваться, чтобы поддерживать линзу лазерной системы зажигания чистой. В качестве примера. линза камеры может быть расположена относительно высоко на боковой поверхности цилиндра, где поршневое кольцо может очищать линзу. Дополнительно, лазер мог бы выжигать остаточную сажу. По существу, этот подход может требовать затвора либо может нуждаться в блокируемой линии визирования лазера, чтобы избегать повреждения фотодетектора (такого как ПЗС-камера).
В качестве еще одного примера, камера (или фотодетектор) и лазер могут быть выполнены с возможностью совместно использовать линзу. В нем, обычная работа лазера может сжигать все, что угодно, покрывающее линзу, тем самым, очищая линзу во время работы лазера.
Таким образом, лазерная система зажигания может преимущественно использоваться для диагностирования различных компонентов и условий цилиндра. Посредством использования лазера для освещения цилиндра и фотодетектора для захвата изображений внутри цилиндра с использованием лазерной подсветки, визуальный контроль цилиндра может выполняться без необходимости в бороскопе, разборке двигателя на части или других трудоемких, затратных и занимающих много времени подходах. Посредством предоставления механику возможности видеть изображения внутренней части цилиндра наряду с соответствующими опорными изображениями того же самого цилиндра, работоспособность двигателя может диагностироваться механиком точнее и достовернее. Посредством использования существующего оборудования двигателя для выполнения визуального контроля, достигаются преимущества сокращения компонентов и снижения стоимости. В общем и целом, может упрощаться контроль двигателя без снижения тщательности контроля.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящей заявки, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИАГНОСТИКА, ОСНОВАННАЯ НА ЛАЗЕРНОЙ СИСТЕМЕ ЗАЖИГАНИЯ | 2014 |
|
RU2667831C2 |
| ДИАГНОСТИКА, ОСНОВАННАЯ НА ЛАЗЕРНОЙ СИСТЕМЕ ЗАЖИГАНИЯ | 2014 |
|
RU2668081C2 |
| СПОСОБЫ ДЛЯ ЛАЗЕРНОГО ЗАЖИГАНИЯ И ИЗМЕРЕНИЯ | 2013 |
|
RU2628107C2 |
| СПОСОБ ЗАЩИТНОЙ БЛОКИРОВКИ УСТРОЙСТВА ЛАЗЕРНОГО ЗАЖИГАНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2651586C2 |
| Система и способ для двигателя с отключаемыми цилиндрами | 2018 |
|
RU2704124C2 |
| ЛАЗЕРНОЕ ЗАЖИГАНИЕ И КОНТРОЛЬ ПРОПУСКОВ ЗАЖИГАНИЯ | 2013 |
|
RU2648993C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДИАГНОСТИКИ УХУДШЕНИЯ ХАРАКТЕРИСТИК КОМПОНЕНТОВ В ДВИГАТЕЛЕ | 2013 |
|
RU2610334C2 |
| СИСТЕМА ЛАЗЕРНОГО НАГРЕВА | 2012 |
|
RU2610528C2 |
| СПОСОБ УПРАВЛЕНИЯ ВПРЫСКОМ ТОПЛИВА ДВУХТОПЛИВНОГО ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДВУХТОПЛИВНОГО ДВИГАТЕЛЯ | 2014 |
|
RU2660717C2 |
| ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ЛАЗЕРНОЙ СИСТЕМЫ ЗАЖИГАНИЯ | 2011 |
|
RU2566665C2 |
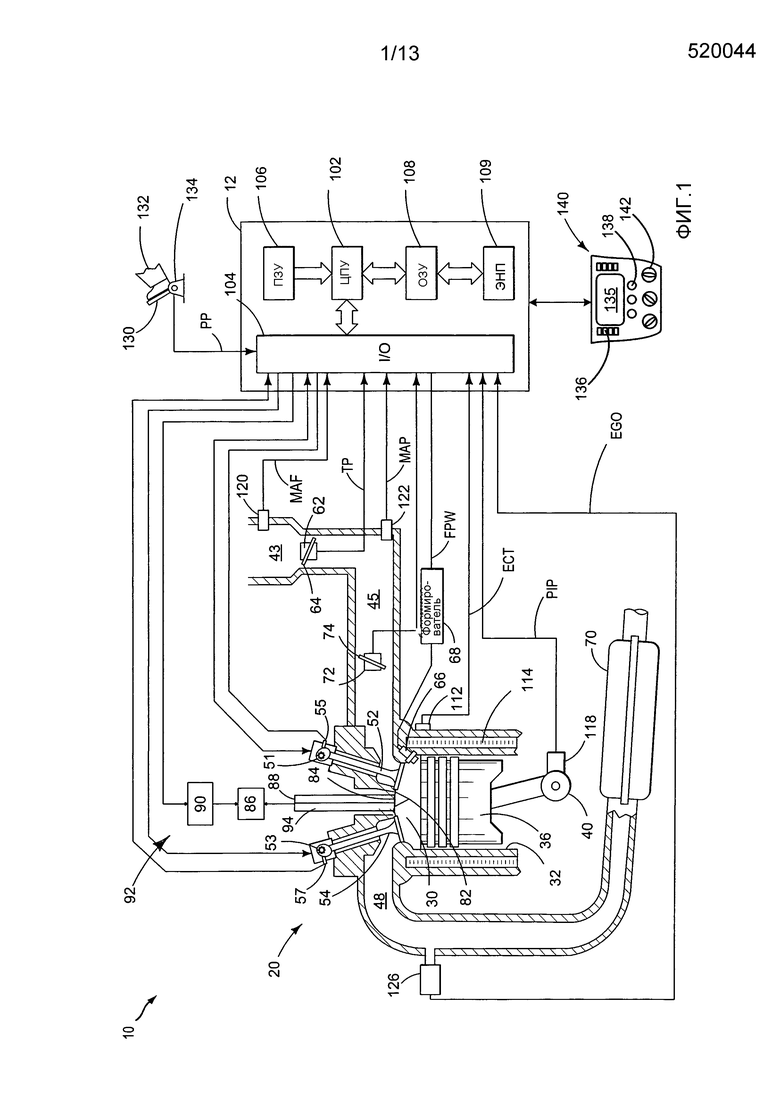
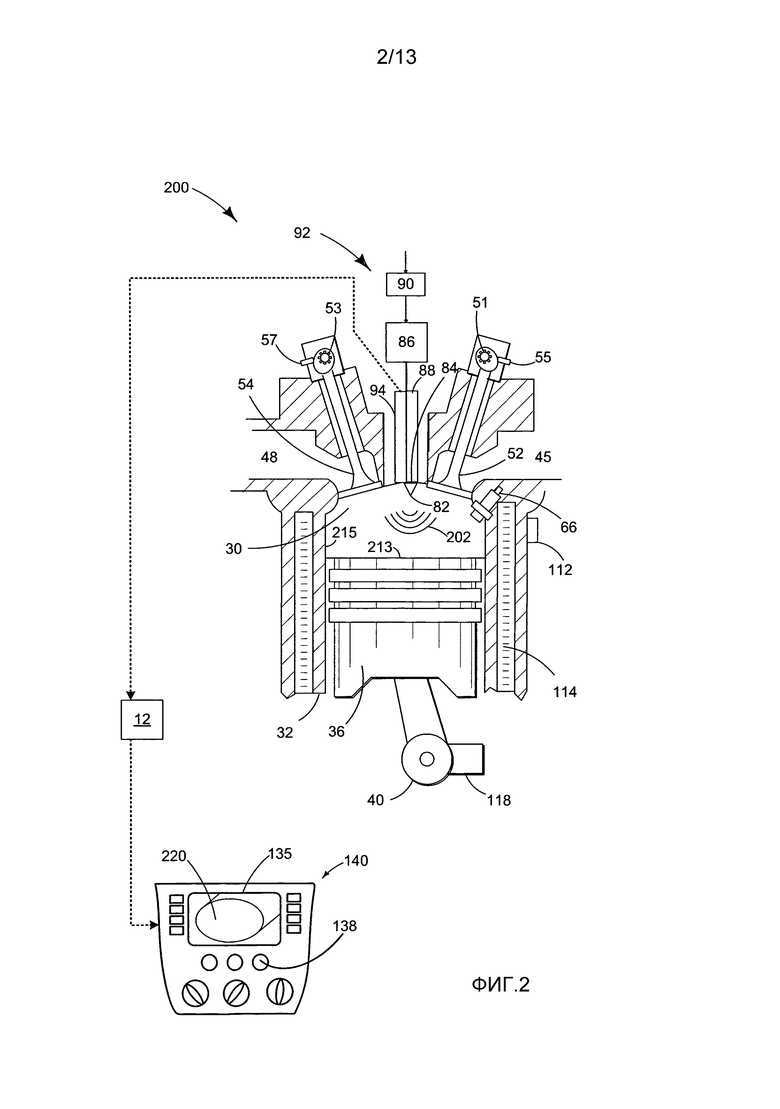
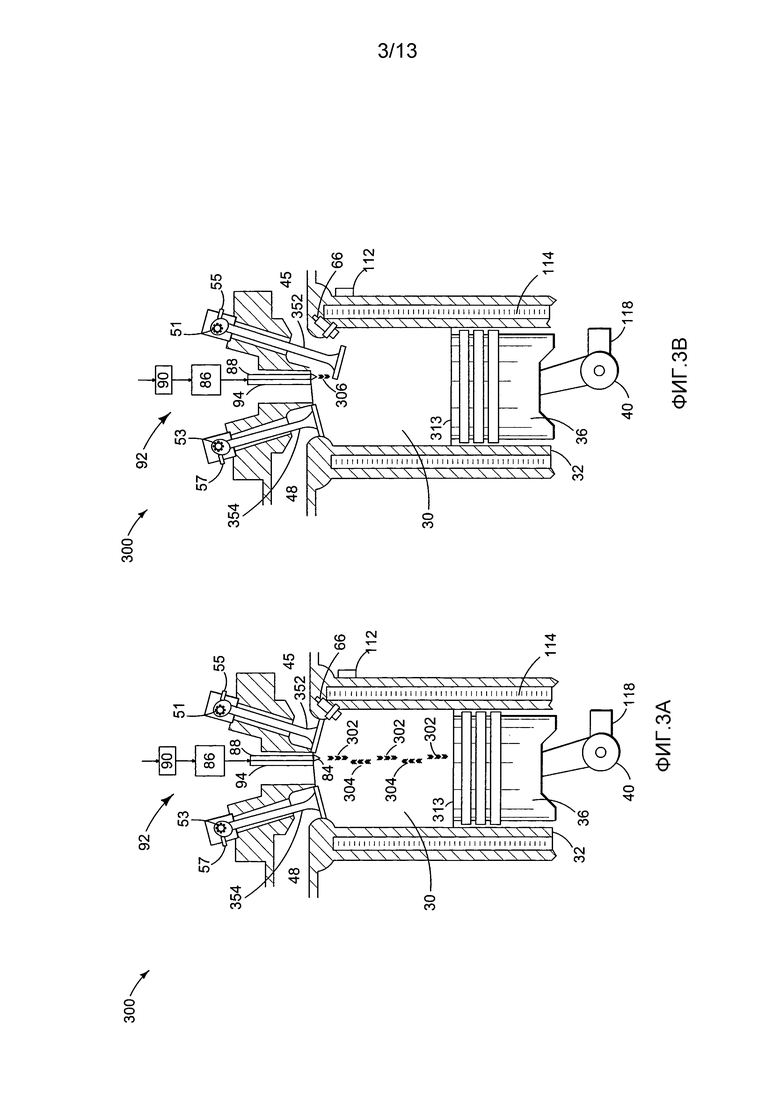
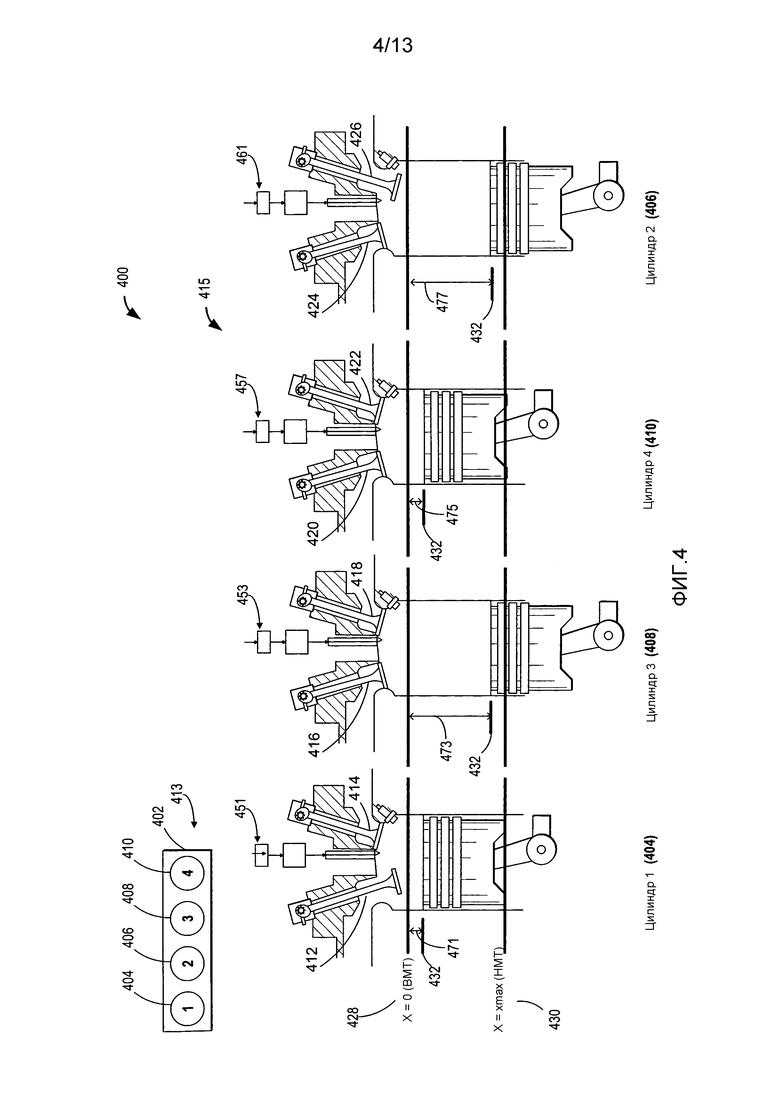
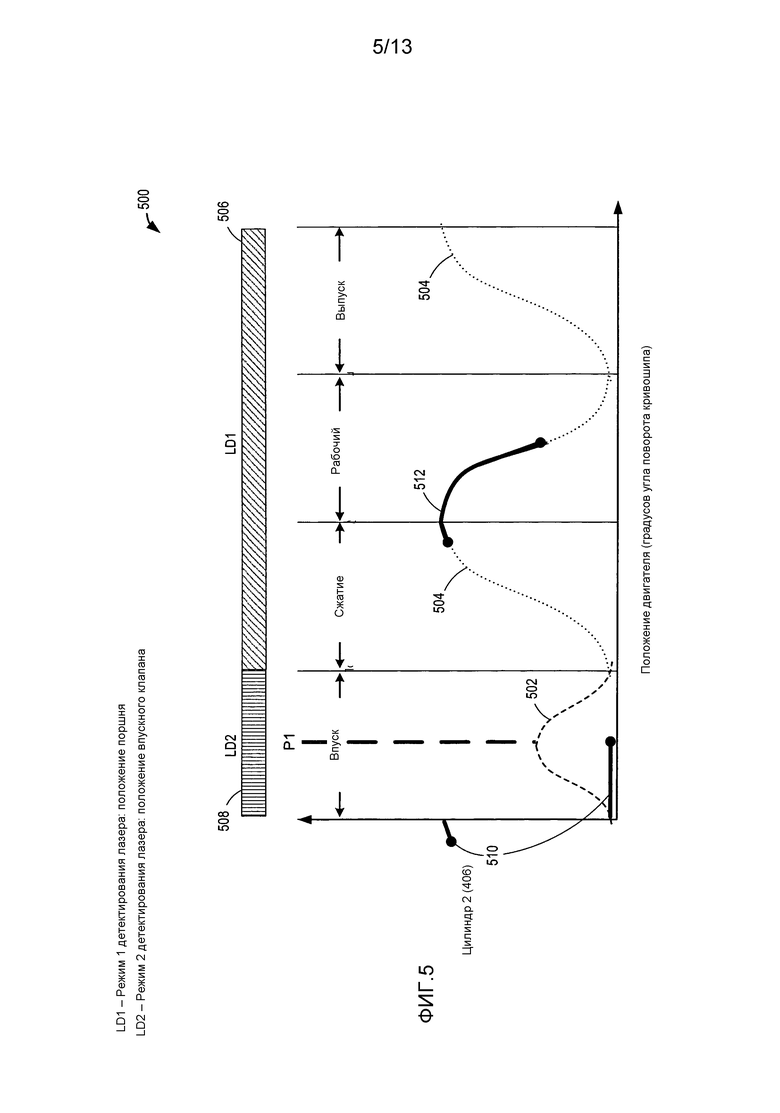
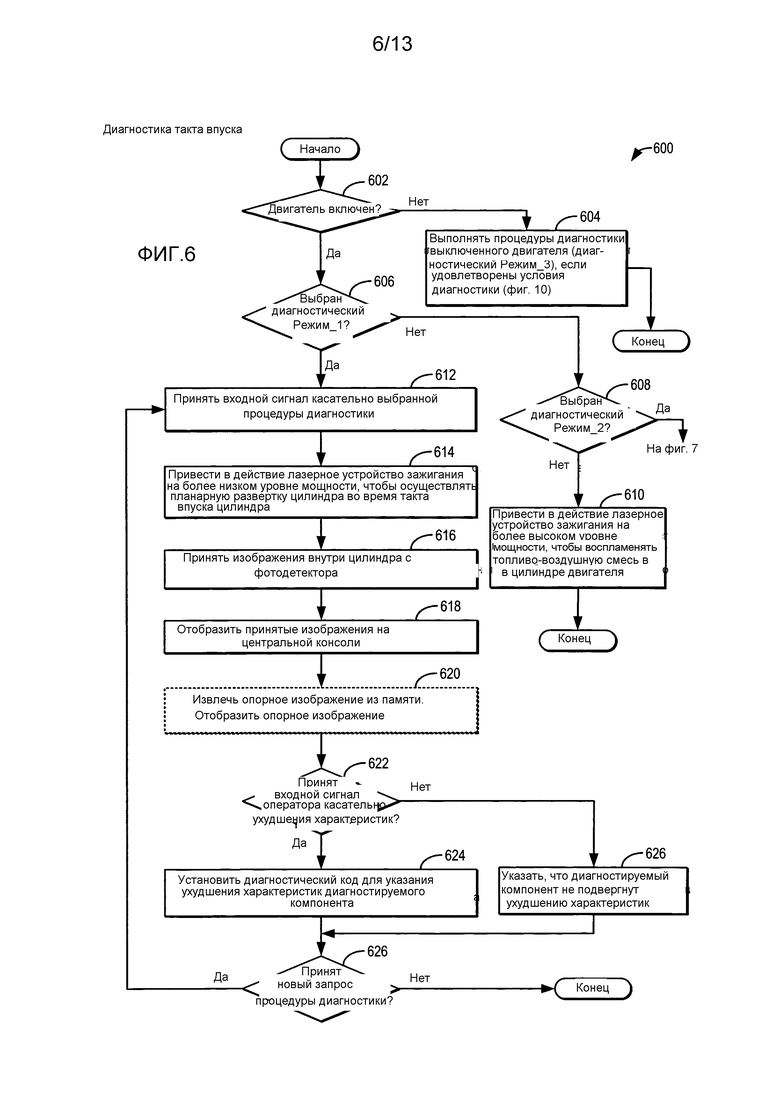
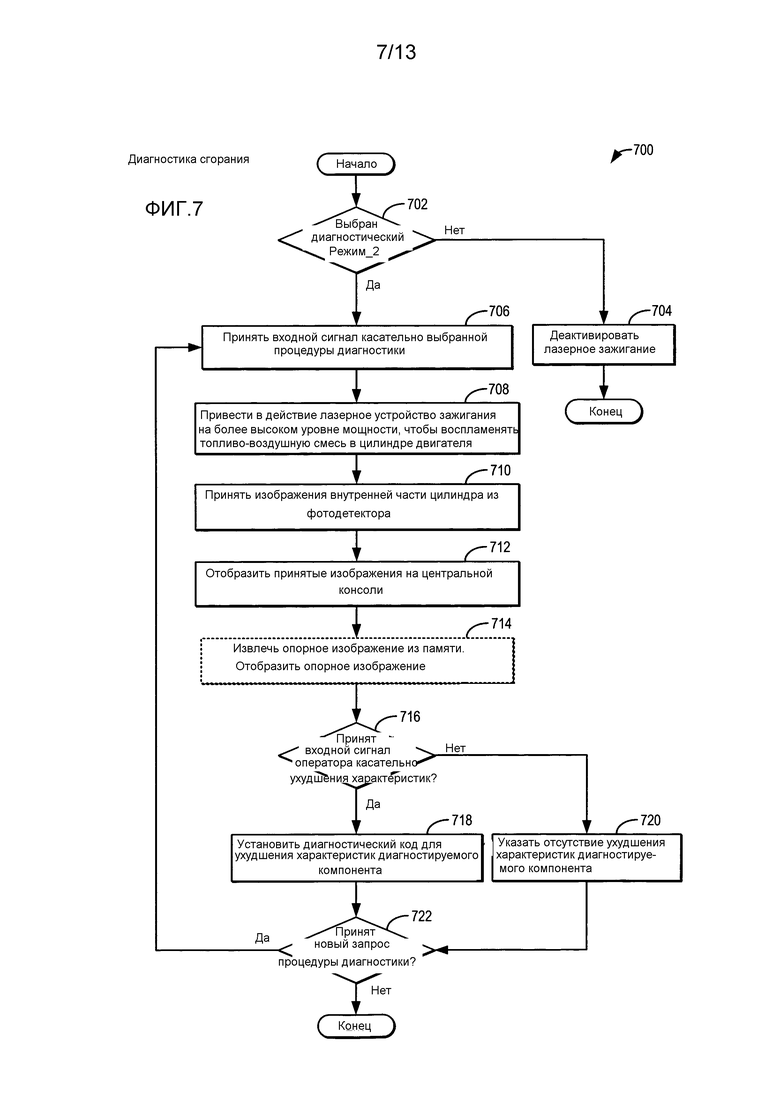
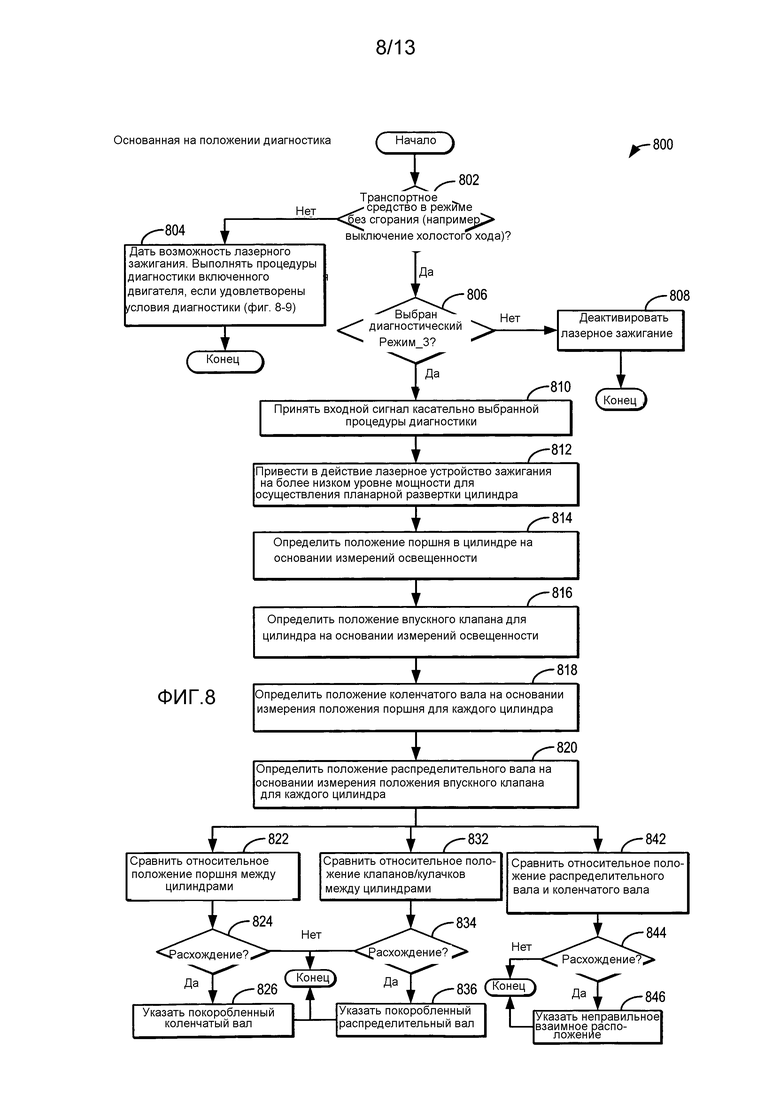
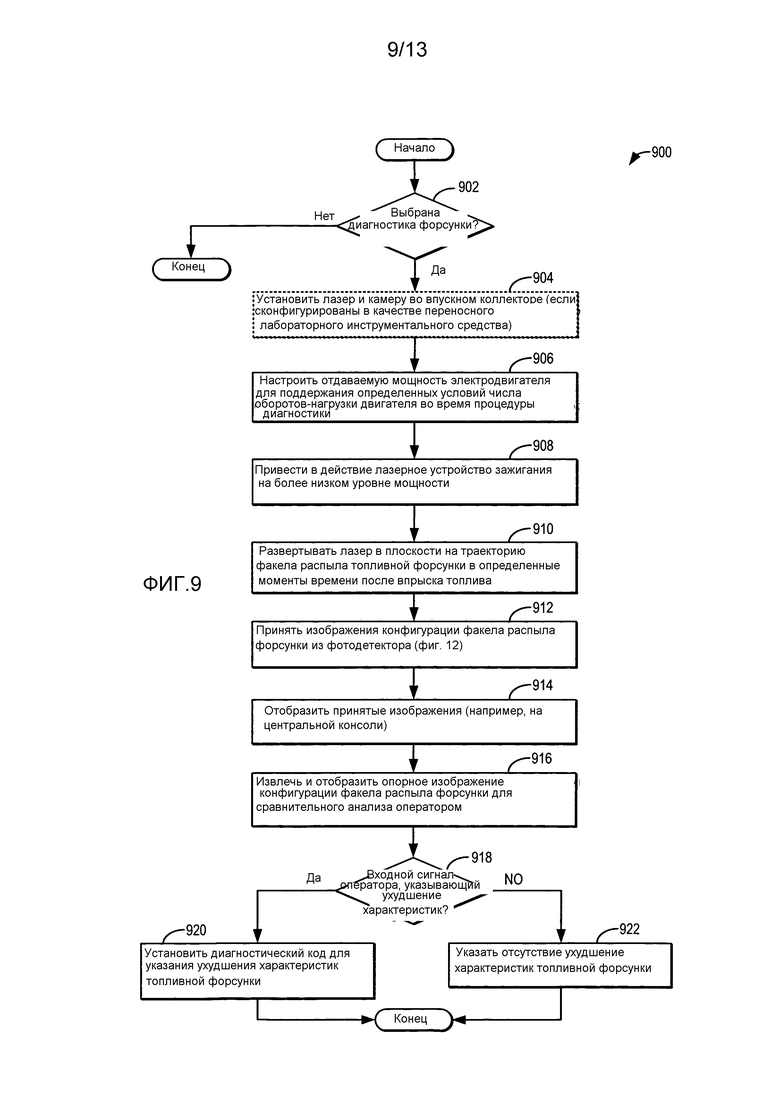
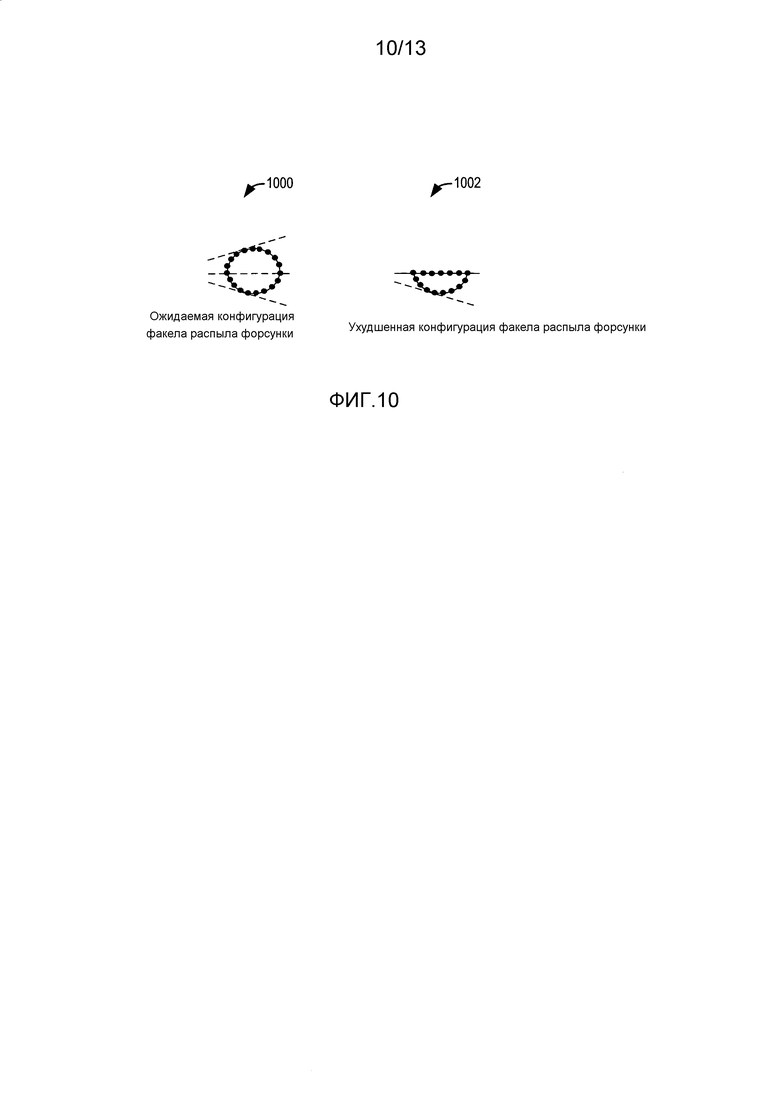
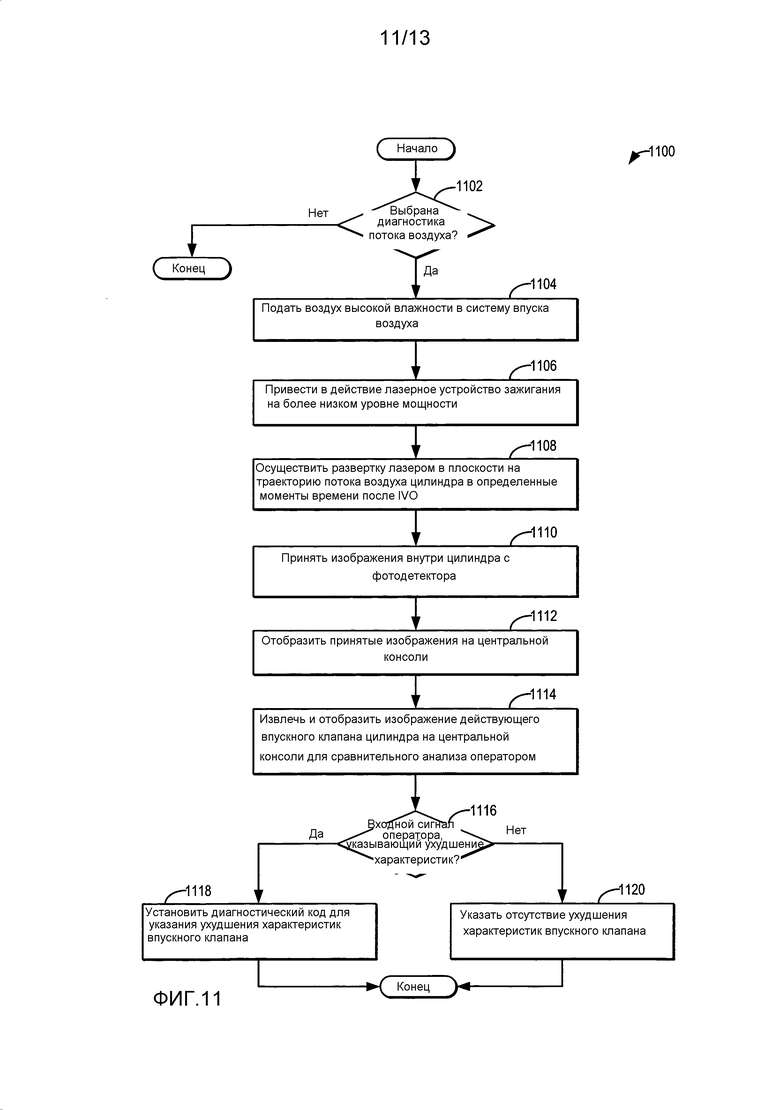
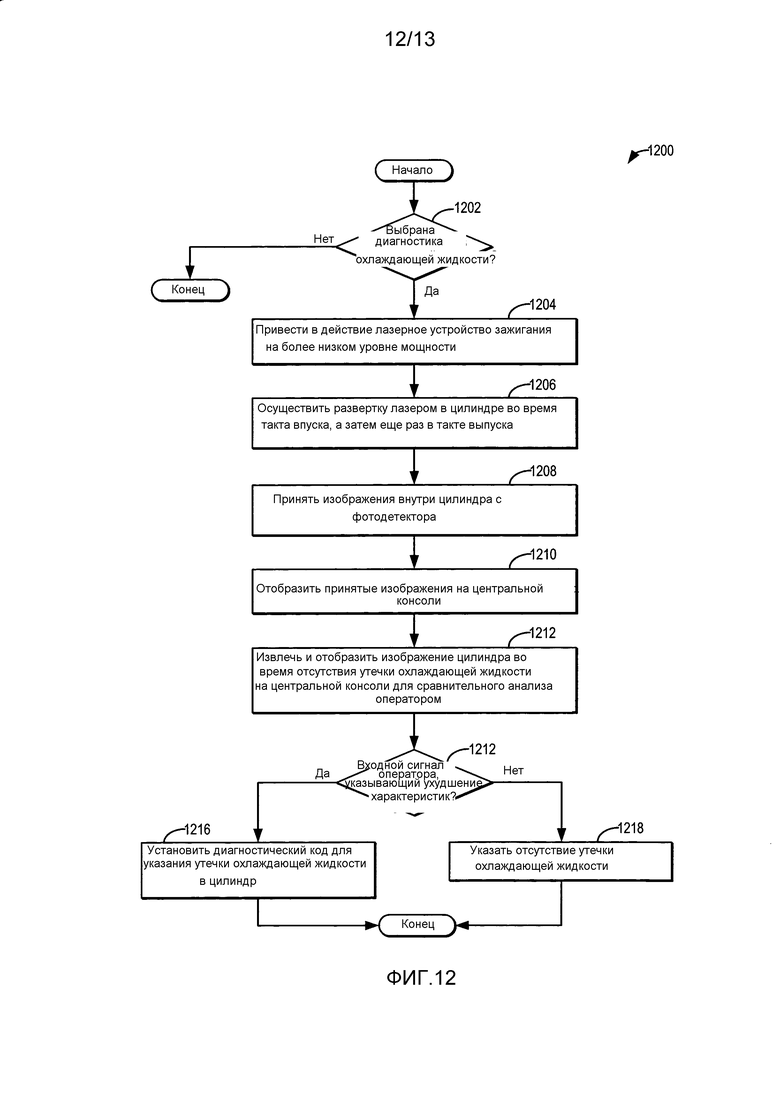
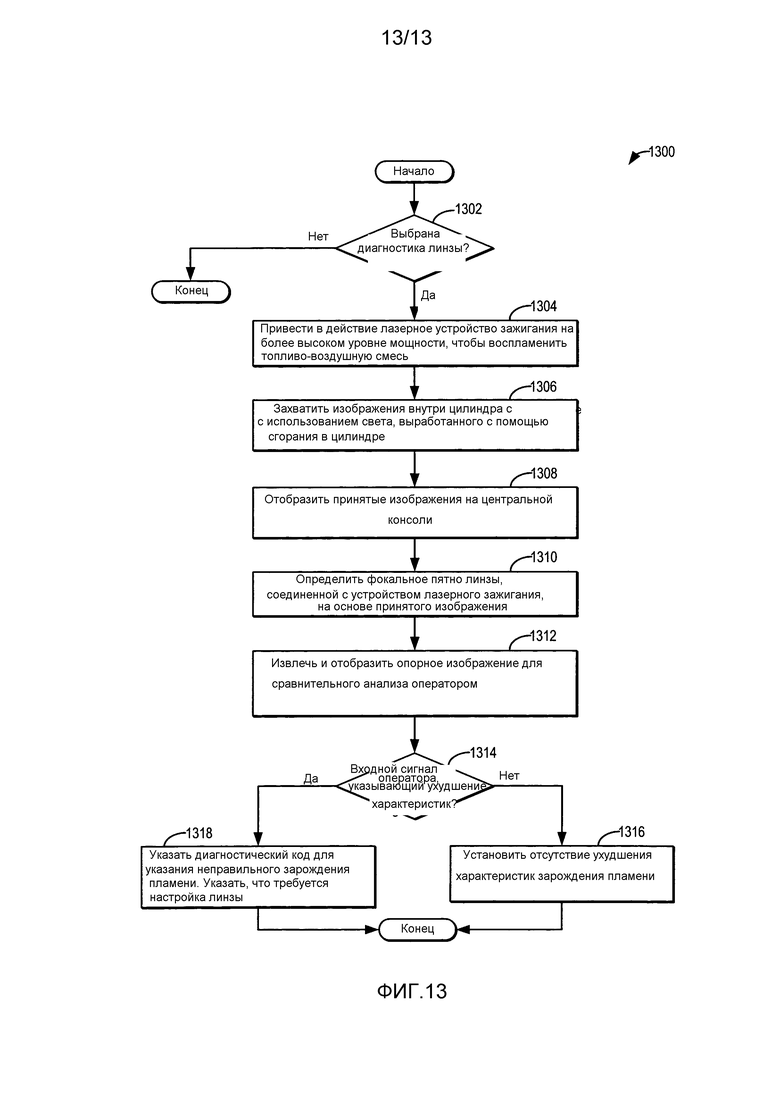
Изобретение относится способам и системам для использования лазерной системы зажигания для выполнения визуального контроля двигателя и диагностирования различных компонентов и условий цилиндра на основании позиционных измерений в двигателе. Лазерные импульсы могут испускаться на более низком уровне мощности во время такта впуска и/или выпуска, чтобы освещать внутреннюю часть цилиндра, в то время как фотодетектор захватывает изображения внутренней части цилиндра. Дополнительно, лазерные импульсы могут испускаться на более высоком уровне мощности, чтобы инициировать сгорание в цилиндре, наряду с тем, что фотодетектор захватывает изображения внутренней части цилиндра с использованием света, сформированного во время сгорания в цилиндре. Техническим результатом является сокращение времени и затрат, ассоциативно связанных с визуальным контролем двигателя, не снижая тщательности контроля. 3 н. и 16 з.п. ф-лы, 14 ил.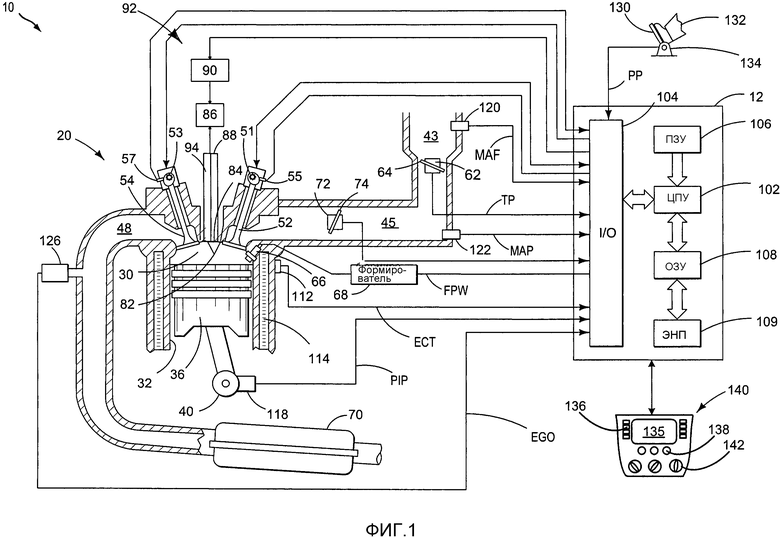
1. Способ для двигателя транспортного средства, содержащий этапы, на которых:
инициируют сгорание в цилиндре посредством приведения в действие лазерного устройства зажигания на мощности, более высокой, чем пороговая мощность, требуемая только для освещения цилиндра;
формируют внутрицилиндровое изображение после приведения в действие лазерного устройства зажигания с использованием света, вырабатываемого с помощью сгорания в цилиндре; и
отображают упомянутое сформированное изображение и опорное изображение оператору на устройстве отображения транспортного средства; и
указывают ухудшение характеристик компонента цилиндра на основании входного сигнала оператора.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
сравнивают сформированное изображение с опорным изображением; и
на основании сравнения указывают ухудшение характеристик компонента цилиндра.
3. Способ по п. 1, в котором опорное изображение является опорным изображением компонента цилиндра, причем опорное изображение выбирается на основании сформированного изображения.
4. Способ по п. 1, в котором приведение в действие лазерного устройства зажигания на более высокой мощности заключается в том, что направляют лазерные импульсы в цилиндр, чтобы осуществлять планарную развертку цилиндра во время такта сжатия цилиндра.
5. Способ по п. 4, в котором сформированное изображение формируется в фотодетекторе, присоединенном к лазерному устройству зажигания, и при этом опорное изображение включает в себя опорное изображение, сформированное ранее фотодетектором.
6. Способ по п. 1, в котором указание ухудшения характеристик заключается в том, что устанавливают диагностический код.
7. Способ по п. 1, в котором компонентом цилиндра является поршень, при этом сформированное изображение является показывающим днище поршня, и при этом указание ухудшения характеристик заключается в том, что указывают оплавление днища поршня.
8. Способ по п. 1, в котором сформированное изображение является указывающим распространение пламени сгорания в цилиндре, и при этом указание ухудшения характеристик заключается в том, что указывают неправильное распространение пламени.
9. Способ по п. 1, в котором диагностируемым компонентом цилиндра является лазерное устройство зажигания, при этом сформированное изображение является указывающим ориентацию вывода лазера лазерным устройством зажигания, и при этом указание ухудшения характеристик заключается в том, что указывают неправильную ориентацию вывода лазера.
10. Способ по п. 1, в котором диагностируемым компонентом цилиндра является линза, присоединенная к лазерному устройству зажигания, при этом сформированное изображение является указывающим фокальную точку линзы, и при этом указание ухудшения характеристик заключается в том, что указывают неправильное зарождение пламени.
11. Способ для двигателя, содержащий этапы, на которых:
приводят в действие лазерное устройство зажигания во время такта сжатия, чтобы инициировать сгорание в цилиндре;
передают внутрицилиндровое изображение, сформированное после приведения в действие лазерного устройства зажигания, на устройство отображения транспортного средства, причем изображение формируется фотодетектором цилиндра с использованием света, вырабатываемого сгоранием в цилиндре; и
устанавливают диагностический код, указывающий ухудшение характеристик, на основании входного сигнала, принятого от оператора.
12. Способ по п. 11, в котором фотодетектор присоединен к цилиндру, фотодетектор включает в себя линзу и камеру.
13. Способ по п. 12, в котором внутрицилиндровое изображение является изображением компонента цилиндра или параметра сгорания, причем способ дополнительно состоит в том, что отображают опорное изображение оператору на устройстве отображения транспортного средства, опорное изображение выбирается на основании компонента цилиндра или параметра сгорания.
14. Способ по п. 13, в котором указание ухудшения характеристик заключается в том, что указывают ухудшение характеристик диагностируемых компонента цилиндра или параметра сгорания.
15. Способ по п. 14, в котором внутрицилиндровое изображение является изображением зарождения пламени сгорания, и при этом указание ухудшения характеристик заключается в том, что указывают ухудшение характеристик линзы фотодетектора.
16. Система транспортного средства с гибридным приводом, содержащая:
двигатель, включающий в себя цилиндр;
электродвигатель;
устройство отображения в кабине транспортного средства;
лазерную систему зажигания, присоединенную к головке цилиндра и выполненную с возможностью направлять световые импульсы в цилиндр;
систему фотодетектирования, присоединенную к лазерной системе зажигания и к цилиндру, для формирования изображений внутренней части цилиндра с использованием световых импульсов из лазерной системы зажигания; и
контроллер с постоянной памятью и машиночитаемыми командами для:
приведения в действие лазерной системы зажигания во время такта сжатия, чтобы инициировать сгорание в цилиндре;
отображения внутрицилиндрового изображения, сформированного в системе фотодетектирования, вслед за приведением в действие, оператору транспортного средства на устройстве отображения;
отображения опорного изображения, извлеченного из памяти контроллера, на устройстве отображения, причем опорное изображение основано на сформированном внутрицилиндровом изображении; и
указания ухудшения характеристик сгорания в цилиндре на основании входного сигнала оператора, принятого вслед за отображением.
17. Система по п. 16, в которой система фотодетектирования включает в себя ПЗС-камеру с линзой типа рыбий глаз, и при этом отображение заключается в том, что беспроводным образом передают изображения в пределах системы транспортного средства из системы фотодетектирования на устройство отображения.
18. Система по п. 17, в которой контроллер включает в себя дополнительные команды для:
настройки выходной мощности электродвигателя при вводе в действие лазерной системы зажигания, чтобы поддерживать определенные число оборотов и нагрузку двигателя во время формирования внутрицилиндрового изображения.
19. Система по п. 18, в которой приведение в действие во время такта сжатия заключается в том, что приводят в действие лазерную систему зажигания выше порогового уровня мощности.
| СПОСОБ ВОСПЛАМЕНЕНИЯ ТОПЛИВНОЙ СМЕСИ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ ЛАЗЕРНЫМ ОПТИЧЕСКИМ РАЗРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436991C1 |
| Самоходная лебедка для канатно-рельсовых: дорог с неподвижным канатом | 1954 |
|
SU101101A1 |
| US 20110186022 A1, 04.08.2011 | |||
| US 7334563 B2, 26.02.2008 | |||
| US 20060037572 A1, 23.02.2006. | |||

