Настоящее изобретение относится к способу выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях и к системе для осуществления этого способа.
Чтобы избежать опасных ситуаций неконтролируемого выхода углеводородов из извлекающих скважин, также называемого «фонтаном», важно иметь прогноз того, с чем соприкоснется бур во время бурения с точки зрения порового давления в геологических формациях, которые предстоит пройти буру во время буровых работ на нефтяной скважине.
Возможность определения аномального скачка порового давления на границе раздела действительно позволяет принять ряд предупредительных мер, чтобы препятствовать возникновению фонтана.
Такой прогноз особенно полезен в случае сценариев, в которых формация характеризуется низкой проницаемостью (10-100 микродарси), что не позволяет осуществлять непосредственное измерение давления в порах.
Решение, используемое в настоящее время, состоит в упреждающей оценке давлений, т.е. до буровых операций, посредством рефлектометрических сейсмических способов, для выявления тенденций изменения таких давлений, с разрешением порядка десятков метров.
Впоследствии предполагаемые тенденции можно перекалибровать как функцию от глубины скважины, при этом в скважине во время бурения проводят локальные измерения (скорости звука, удельного сопротивления, гамма-излучения, плотности и так далее). Таким способом удается достичь повышения точности определения распределения давлений в боковом направлении.
Математические модели, используемые в настоящее время для обработки измерений и определения тенденций изменения порового давления в формациях, представляют собой оценочные модели, которые не позволяют предсказать аномальные давления, возможно имеющиеся в еще не пройденных формациях, в особенности, если литология таких формаций характеризуется быстрыми вариациями формаций в окрестности бура, и/или если геодавление обусловлено явлениями, которые не могут быть приписаны недостаточному сжатию.
Целью настоящего изобретения является устранение вышеуказанных недостатков и, в частности, создание такого способа выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, который позволяет прогнозировать аномальное давление в формациях, которые еще только должны быть пробурены, на расстоянии несколько метров перед буром.
Другой целью настоящего изобретения является создание такого способа выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, который позволяет прогнозировать давление с разрешением порядка метра.
Еще одной целью настоящего изобретения является создание системы для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, которая позволяет проводить измерения непосредственно перед буром.
Эти и другие цели настоящего изобретению достигнуты в системе для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, как сформулировано в п. 1 формулы изобретения.
Дополнительные признаки системы сформулированы в зависимых пунктах 2-10 формулы изобретения.
Эти и другие цели достигнуты в способе выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, как сформулировано в п. 11 формулы изобретения.
Дополнительные признаки способа сформулированы в зависимых пунктах 12-21 формулы изобретения.
Признаки и преимущества способа выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях согласно настоящему изобретению станут понятнее из последующего описания, данного в качестве примера и не предназначенного для ограничения, со ссылками на сопровождающие чертежи, где:
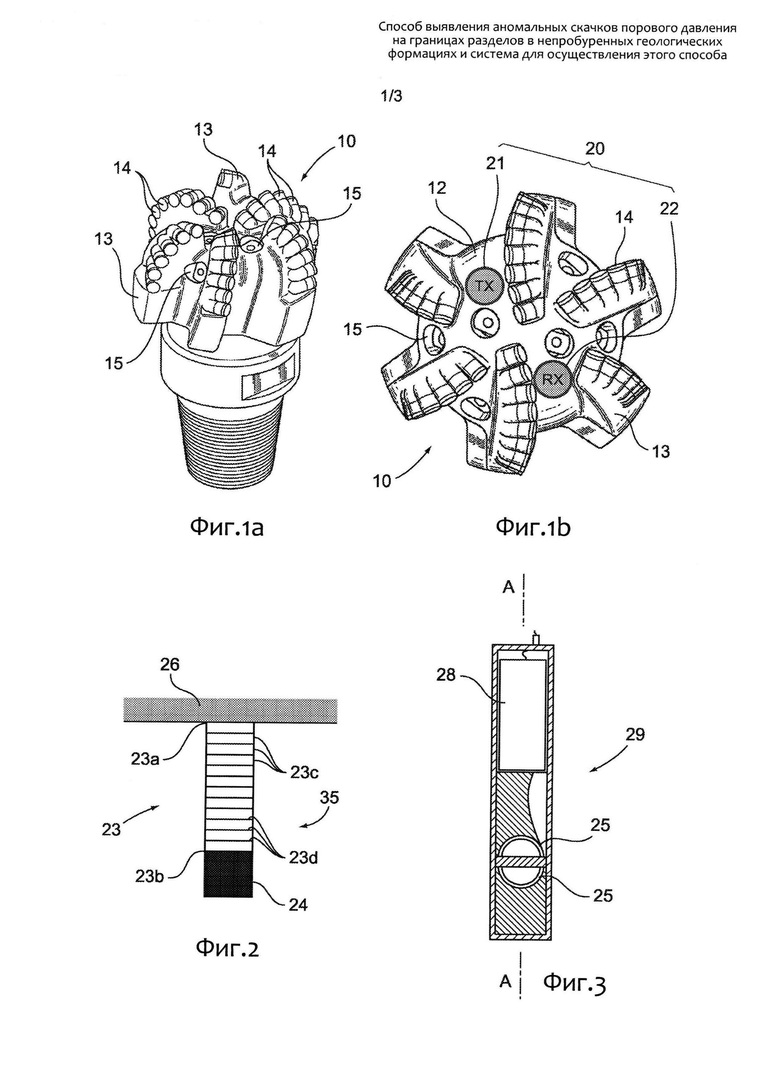
на фиг. 1а и 1b показаны вид в перспективе и вид сверху, соответственно, одного предпочтительного, но не ограничивающего изобретение варианта системы для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях согласно настоящему изобретению;
на фиг. 2 схематично показан предпочтительный, но не ограничивающий изобретение вариант выполнения электроакустического передатчика, используемого в системе согласно настоящему изобретению;
на фиг. 3 схематично показан предпочтительный, но не ограничивающий изобретение вариант выполнения электроакустического приемника, используемого в системе согласно настоящему изобретению;
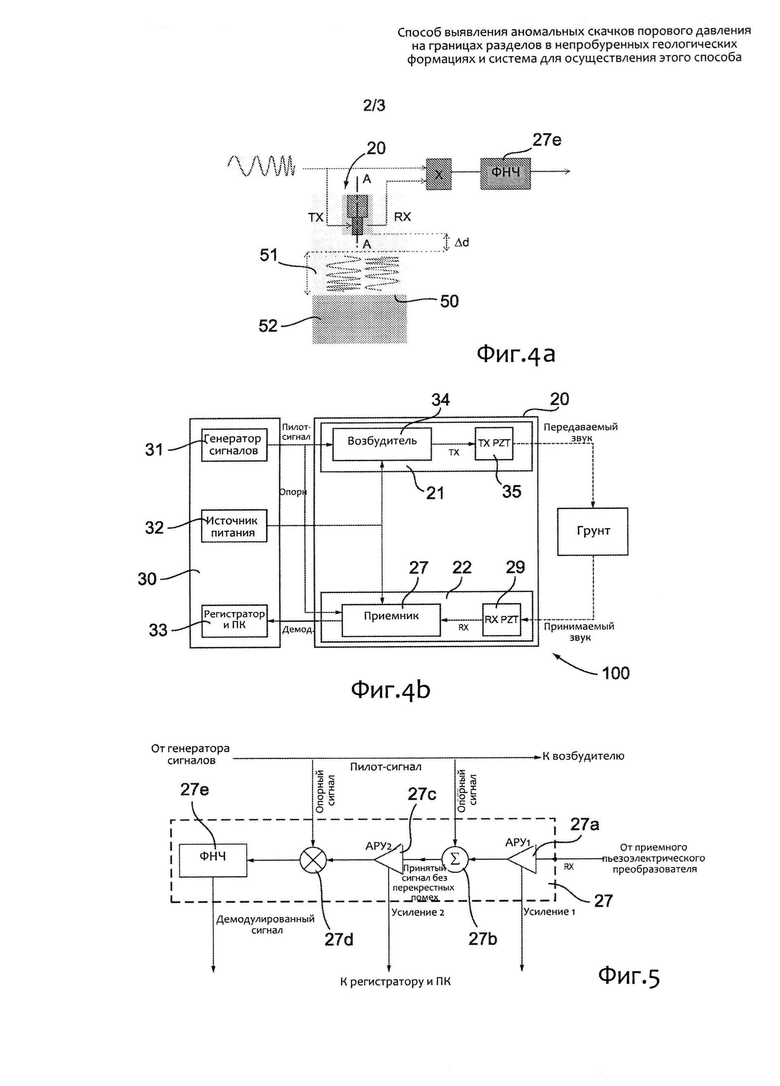
на фиг. 4а и 4b схематично показана первая измерительная фаза способа выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях;
на фиг. 5 схематично показано обрабатывающее средство, входящее в состав акустического приемника;
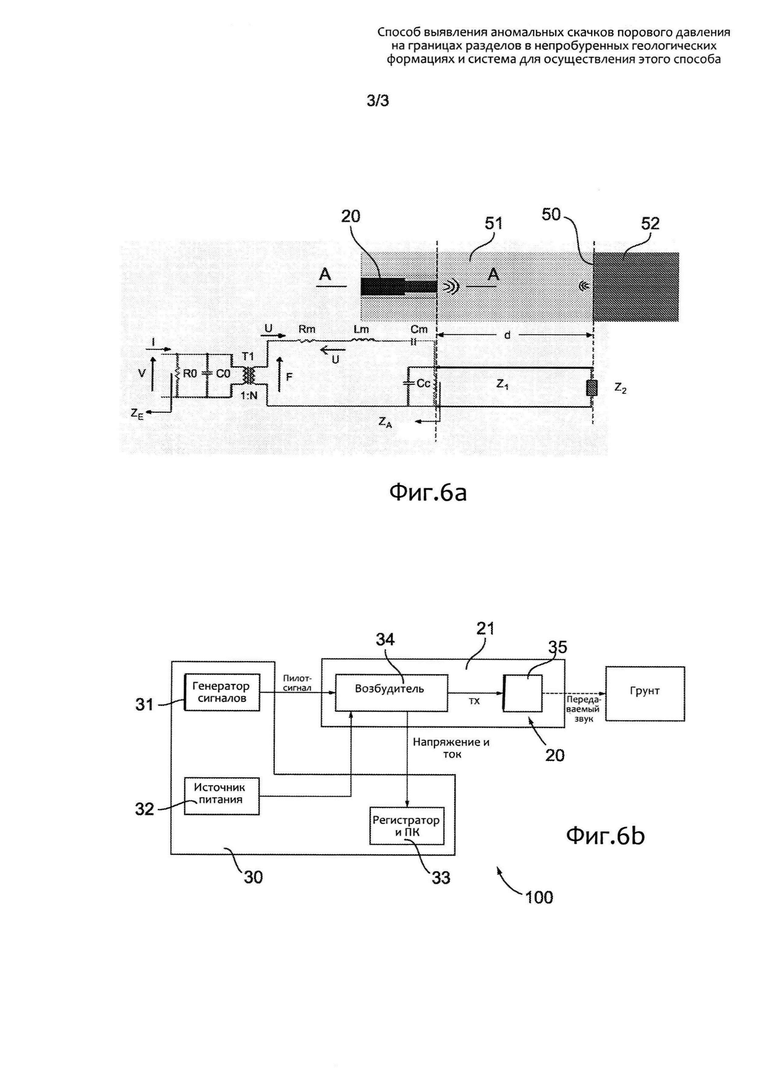
на фиг. 6а и 6b схематично показана вторая измерительная фаза способа выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях;
На чертежах показана система для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, везде обозначенная позицией 100.
Система 100 для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях содержит бур 10 для бурения формации, в который согласно настоящему изобретению встроен электроакустический преобразователь 20.
Электроакустический преобразователь 20 связан с электронным обрабатывающим устройством 30, которое подходит для работы с имеющимся источником питания, генерирует управляющие сигналы и обрабатывает данные, полученные преобразователем 20.
С этой целью электронное обрабатывающее устройство 30 содержит генератор 31 пилот-сигнала, средство 32 питания и средство 33 для получения и обработки данных.
Средство 33 для получения и обработки данных содержит программные средства (не показаны) для реализации способа 200 выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях согласно настоящему изобретению.
Электроакустический преобразователь 20 содержит передатчик 21 и приемник 22, каждый из которых имеет специфический пьезоэлектрический преобразователь 29, 35, один из которых связан с возбудителем 34 пьезоэлектрического преобразователя 35 для генерации звуковых волн и называется также передающим преобразователем, а другой связан со средством 27 аналоговой предварительной обработки сигнала, принятого от пьезоэлектрического преобразователя 29, предназначенного для приема звуковых волн, и называется также приемным преобразователем.
Средство аналоговой предварительной обработки принятого сигнала предпочтительно содержит первую цепь 27а автоматической регулировки усиления, цепь 27b вычитания, вторую цепь 27с автоматической регулировки усиления, цепь 27d умножения и фильтр 27е нижних частот, соединенные последовательно.
В частности, бур 10 содержит по меньшей мере одну буровую поверхность 12, из которой выступает электроакустический преобразователь 20, при этом электроакустический преобразователь 20 имеет ось А, которая по существу ортогональна буровой поверхности 12.
Предпочтительно, бур 10 выполнен из поликристаллического алмазного композита (PDC, Polycrystalline Diamond Composite) и имеет по меньшей мере одну буровую поверхность 12 и множество выступов 13, на которых установлены режущие средства 14, предпочтительно алмазного типа.
Кроме того, в центральной части буровой поверхности 12 бура 10 имеются инжекторы 15 для прохождения буровой грязи.
Электроакустический преобразователь 20 предпочтительно установлен в буре 10 так, что он идет от буровой поверхности 12, используя пространство между выступами 13 и избегая центральной части поверхности 12, где имеются инжекторы 15.
Корпус электроакустического преобразователя 20 в буре 10 налагает ограничения на размеры преобразователя 20, в частности на излучающую и приемную поверхности, диаметр которых должен составлять порядка нескольких сантиметров.
Согласно предпочтительному варианту выполнения настоящего изобретения, показанному на фиг. 1а и 1b, передатчик 21 и приемник 22 установлены по отдельности в середине между выступами 13, предпочтительно на расстоянии, которое не превышает 6-7 см, чтобы обеспечить проход буровой грязи между этими двумя элементами 21, 22.
В одном альтернативном варианте выполнения настоящего изобретения, который не показан, передатчик 21 и приемник 22 помещены в цилиндрический корпус, предпочтительно с диаметром, не превышающим 6-7 см.
Для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях электроакустический преобразователь 20 должен удовлетворить некоторым требованиям, включая:
- работу в полосе между несколькими сотнями Гц и несколькими кГц;
- излучение мощности, необходимой для прохождения через формацию глубиной приблизительно 10 м;
- минимизацию перекрестных помех между передатчиком 21 и приемником 22.
Необходимость одновременного удовлетворения таких требований в дополнение к ограничениям на размеры, налагаемые на электроакустический преобразователь 20 требованиями к конкретному корпусу, продиктованными конкретным применением, делает выбор пьезоэлектрических преобразователей 29, 35, которые могут использоваться для изготовления передатчика 21 и приемника 22, очень важным фактором.
Относительно низкие частоты, на которых работает электроакустический преобразователь 20, являются причиной низкой эффективности передачи механической энергии от излучающей поверхности передающего преобразователя 35 или источника в формацию.
По этому поводу следует заметить, что так называемый «импеданс излучения» Zrad, то есть отношение между силой, создаваемой передающим преобразователем 35, и скоростью, с какой он осциллирует, зависит от взаимодействия между источником 35 и формацией.
Более точно это может быть выражено как
Zrad=A(ZAzrad+B),
где - ZA - скаляр, который рассматривают как отношение между давлением волны и ее скоростью частиц в отсутствие источника (распространение плоской волны), зависящее только от акустических и геометрических свойств формации;
- А - площадь излучающей поверхности;
- zrad (нормализованный импеданс излучения), который представляет собой корректирующий член, учитывающий размеры источника (диаметр D) относительно длины волны λ в формации (обратно пропорционален рабочей частоте), и равен:

- В - импеданс, представляющий упругую связь между источником и формацией, который можно выразить так:
где
- J1 () - функция Бесселя первого рода;
- K1 () - функция Струве;
- v - скорость звука в формации;
- k=2π/λ=ω/v - волновое число в формации;
- Ε - модуль упругости для формации;
- ν - коэффициент Пуассона для формации;
- а - радиус круговой поверхности источника.
Для размеров и полосы частот, доступных для конкретных приложений, в которых длина волны приблизительно в 100 раз больше, чем диаметр излучающей поверхности передающего преобразователя 35, имеем, следовательно, ka~0.03, активная составляющая импеданса rrad, со стороны преобразователя 20 составляет приблизительно на 2 порядка меньше, чем реактивная составляющая импеданса xrad.
Поэтому импеданс излучения Zrad является главным образом мнимым, то есть лишь небольшая часть мощности, входящей в источник 35, рассеивается в виде излученной акустической мощности.
Излучаемая акустическая мощность равна

где А - площадь излучающей поверхности, Rrad - действительная часть Zrad, X - действительный вектор смещения источника в осевом направлении, определяемый как ξ(t)=Xsin(ωt), U - вектор скорости частицы излучающей поверхности с модулем |U|=ωX, тогда как F - вектор силы, создаваемой источником в формации с модулем |F|=|UZrad|=ωX|Ζrad|.
Поскольку невозможно увеличить площадь излучающей поверхности из-за ограничений по размерам, описанных выше, необходимо увеличить максимальное смещение X источника 35.
Поэтому для получения определенной мощности излучения Ptarget необходимо, чтобы источник имел смещение, равное

Теоретически, собственная резонансная частота передающего преобразователя 35 при этом оказывается ниже рабочей полосы, в результате чего возможные гармоники полезного сигнала оказываются за пределами области резонансной частоты, где чувствительность передатчика 21 больше.
Таким способом, минимизируют величину возможных нелинейных искажений.
Однако ограничения на размеры, которые зависят от конкретного приложения, делают почти невозможным создание резонансной системы с частотой ниже 500 Гц.
Поэтому резонансная частота должна быть выше рабочей полосы. В любом случае такая частота не должна быть слишком высокой, поскольку чувствительность передающего преобразователя 35 по напряжению уменьшается на 12 дБ на октаву от резонансной частоты.
Наконец, близость между источником 35 и приемным преобразователем 29 заставляет систему испытывать перекрестные искажения, то есть сигнал, который распространяется из источника 35 к приемному преобразователю 29 через конструктивные детали бура 10, имеет тенденцию искажать или даже «прятать» полезный сигнал, содержащий информацию о геометрии и акустических свойствах формации.
С учетом сказанного выше, особо предпочтительно использовать полосковый передающий преобразователь 35 или преобразователь «многослойного» типа, как, например, показано на фиг. 2.
Полосковый преобразователь 35 содержит пакет 23 из керамических слоев 23с, которые снабжены соответствующими металлическими электродами 23d.
Для целей конкретного применения согласно изобретению пакет 23 из керамических слоев 23с ограничен на первом конце 23а неподвижным основанием 26, а на втором конце 23b - массой 24, которая служит для уменьшения внутренней резонансной частоты передающего преобразователя 35 и частично согласовывает механический импеданс породы с импедансом керамического пакета 23 для повышения мощности излучения.
Поскольку первый конец 23а заблокирован, все смещение относится ко второму свободному концу 23b.
Предпочтительно, чтобы керамический пакет 23 представлял собой монолитный многослойный привод типа PZT4D.
В одном не ограничивающем варианте выполнения настоящего изобретения, предпочтительном для конкретного применения, предусмотрен керамический пакет 23с длиной, равной приблизительно 10-20 см, при этом каждый керамический диск 23с заключен между электродами, которые изготовлены химическим осаждением на керамику и имеют толщину порядка нескольких десятков микронов.
Масса 24 на втором свободном конце предпочтительно выполнена из стали.
Согласно предпочтительному варианту выполнения настоящего изобретенияакая масса 24 имеет толщину, равную нескольким сантиметрам, и такой диаметр, чтобы использовать пространство, доступное в буре 10, например приблизительно 3 см.
Масса 24 предпочтительно оканчивается слоем материала для согласования с формацией, например слоем полиуретана толщиной в несколько миллиметров для дополнительного улучшения сцепления с формацией.
Предпочтительно, чтобы полосковый передающий преобразователь 35 описанного типа обеспечивал:
- смещение порядка нескольких десятков микронов, которое достаточно для создания достаточной излучаемой акустической мощности в представляющей интерес полосе, например, проникающей через типичную пористую формацию по меньшей мере на 10 м;
- резонансную частоту, лежащую немного выше представляющей интерес полосы (от нескольких сотен Гц до нескольких кГц).
В альтернативном варианте выполнения настоящего изобретения (не показан) передающий преобразователь 35 относится к типу «акустический гриб» («tonpilz»), который представляет собой пакет из керамических слоев, снабженных соответствующими металлическими электродами, которые зажаты между двумя концевыми массами.
Концевые массы выбирают так, чтобы конец, обращенный внутрь бура 10, имел нулевую скорость, а все смещение относилось к концу, обращенному наружу, то есть к формации.
Такой альтернативный вариант выполнения передающего преобразователя 35 менее предпочтителен по сравнению с вариантом с полосковым преобразователем из-за ограничений по размерам вследствие необходимости размещения корпуса электроакустического преобразователя 20 внутри бура 10.
В самом деле, для правильной работы необходимо, чтобы каждая масса имела толщину, равную четверти длины волны на резонансной частоте. Если взять для примера резонансную частоту, равную 3 кГц, стальная массы должна иметь длину, равную приблизительно 40 см, что делает затруднительным ее размещение внутри бура 10.
Для минимизации перекрестных искажений между передающим преобразователем 35 и приемным преобразователем 29 особенно предпочтительно использовать в качестве приемного преобразователя 29 гидрофон со «сбалансированным ускорением», содержащий две керамические полусферы 25, погруженные в масло, как показано на примере на фиг. 3.
Предпочтительно, чтобы две керамических полусферы 25 были типа PZT5A.
Гидрофон 29 со сбалансированным ускорением позволяет ослабить приблизительно на 30-40 децибел звуковой сигнал, приходящий с направления, которое отличается от параллельного оси А' гидрофона 29, как акустические перекрестные помехи, которые распространяются от передающего преобразователя 35 к приемному преобразователю 29 непосредственно через конструктивные детали бура 10.
Электронное обрабатывающее средство 28 предпочтительно интегрировано в гидрофон 29 для предварительного усиления принятого сигнала с целью соответственного увеличения уровня сигнала перед передачей его в электронное обрабатывающее устройство 30 и для минимизации выходного импеданса гидрофона 29.
В остальной части описания мы уделим внимание количественной оценке рабочих характеристик источника и приемника в рамках настоящего изобретения. Такая оценка в значительной степени описывается отношением сигнал/шум (SNR).
Первый элемент, который является частью схемы вычисления отношения сигнал/шум, относится к уровню силы, которая действует со стороны преобразователя на формацию и которая может достигать среднеквадратичного значения 1000 Н. Рассматриваемая рабочая частота равна 1,5 кГц. В одной чисто упругой формации уровень излучаемого акустического давления на глубине 8 м составлял приблизительно 117 дБ относительно стандартного уровня звукового давления, то есть на 117 дБ выше стандартной величины 20 мкПа, которая представляет собой минимальный порог слышимости в воздухе (для справки, этот уровень можно считать подобным шуму, производимому цепной пилой).
Второй элемент, который является частью схемы вычисления отношения сигнал/шум, относится к затуханию в канале передачи и приема после отражения от формации.
Большинство представляющих интерес пород в области применения настоящего изобретения (например, сланцы) характеризуется пороупругостью, то есть вязкоупругостью, которая сильно ослабляет звук. Типичная величина затухания может составить 3 дБ/м на частоте 1,5 кГц. Поэтому через 8 м уровень излученного звукового давления падает на 24 дБ.
Для получения уровня звукового давления, позволяющего достичь приемника, необходимо вычесть следующее:
- 24 дБ, из расчета 8 м распространения от возможной границы раздела в формации до приемника;
- 10 дБ, если считать, что в реальной литологии затруднительно добиться почти полного отражения (то есть предполагается, что там имеет место рассеяние из-за складчатости и что поверхность частично ламбертовская);
- 6 дБ с учетом геометрического фактора вследствие сферического распространения, в результате чего в сумме получаем 64 дБ.
Третий элемент, который является частью схемы вычисления отношения сигнал/шум, относится к чувствительности приемника.
На частоте 1,5 кГц типичный гидрофон характеризуется следующими параметрами:
- чувствительностью приблизительно -200 дБВ на 1 мкПа, что соответствует -174 дбВ на 20 мкПа;
- предусилением величиной 40 дБ.
Четвертый элемент, который является частью схемы вычисления отношения сигнал/шум, относится к уровню шумов в приемнике, который для типичного гидрофона равен -164 дБВ/Гц1/2 на 1 кГц. Вероятная максимальная полоса полезного сигнала (см. способ 1) составляет приблизительно 200 Гц.
Поэтому уровень шумов, который добавляется к полезному сигналу, равен 20log10[10(-164+40)/20√200]=-101 дБВ.
С использованием этих четырех элементов после указанной обработки можно вычислить отношение сигнал/шум:
отношение сигнал/шум = (117-64-174+40)-(-101)=20 дБ.
В этих условиях сигнал еще можно обнаружить, возможно, при выполнении соответствующей последующей обработки (например, накопления), чтобы еще больше снизить влияние шумов.
Способ 200, реализованный системой 100 для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, включает следующее.
Генератор 31 пилот-сигнала в электронном обрабатывающем устройстве 30 посылает пилот-сигнал в возбудитель 34 передатчика 21.
Передатчик 21 генерирует (фаза 210) в направлении оси А электроакустического преобразователя 20 первые звуковые волны давления, которые отражаются назад к приемнику 22 неоднородностями в грунте, при этом под указанными неоднородностями мы подразумеваем границы раздела 50 между двумя формациями 51, 52, которые отличаются с точки зрения литологии и/или порового давления.
На основе отраженных сигналов, принятых приемником 22, электронное обрабатывающее устройство 30 оценивает (фаза 220) скорость генерированной звуковой волны давления и расстояние между электроакустическим преобразователем 20 и первой границей раздела 50 между первой 51 и второй 52 формациями, имеющимися вдоль направления передачи звуковой волны давления в большом диапазоне выявления, в общем случае приблизительно до 10 м.
Глубина выявления связана с частотным диапазоном, используемым для генерации звуковых волн, который обычно составляет от 100 Гц до нескольких кГц, при этом такой диапазон в общем случае включает частотный диапазон, в котором рассеяние волн больше.
Затем передатчик 21 генерирует (фаза 230) вторые звуковые волны давления в направлении оси А электроакустического преобразователя 20.
Затем электронное обрабатывающее устройство 30 вычисляет (фаза 240) электрический импеданс на контактах электроакустического преобразователя 20, что позволяет оценить (фаза 250) множество характеристических параметров этих двух формаций 51, 52 на границе раздела 50, позволяющих выявить (фаза 260), вызвана или нет аномалия, выявленная в результате предыдущей фазы (фаза 220), наличием формации с избыточным давлением. Альтернативно, выявленная аномалия может быть обусловлена, например, изменением литологии.
В самом деле, вследствие эффектов, обусловленных изменением электрического импеданса электроакустического преобразователя 20 из-за наличия в формации жидкости, можно обнаружить вариацию скорости звуковой волны давления от частоты пилот-сигнала в формации, в которой ранее (фаза 220) была открыта аномалия.
Фаза генерации первых звуковых волн давления (фаза 210) предпочтительно включает генерацию радиоимпульсов с линейной частотной модуляцией, то есть с линейным изменением частоты (FMCW, непрерывный частотно-модулированный сигнал) или, другими словами, непрерывный сигнал, частота которого линейно увеличивается со временем.
Выбор такого сигнала особенно предпочтителен, поскольку упрощает обработку принятого сигнала, поэтому ее можно проводить аналоговыми средствами. Таким способом, обеспечивается отсутствие уменьшения разрешения сигнала перед получением.
Кроме того, при той же излученной энергии можно работать при меньших напряжениях возбуждения, поскольку такой сигнал требует меньше пиковой мощности при передаче.
И наконец, для той же глубины границы раздела 50 обеспечивается лучшее отношение сигнал/шум в приемнике 22, поскольку полоса полезного сигнала уже, а следовательно, энергия шумов меньше.
Шаг оценки (фаза 220), основанный на сигналах на контактах акустического приемника 22, включает первую фазу предварительной обработки аналогового сигнала на контактах приемника 22, схематично показанную на фиг. 5 и включающую следующие фазы:
- усиление и выравнивание сигнала на контактах приемника 22 c уровнем амплитуды пилот-сигнала, переданного в передатчик 21 (фаза 221) через первую цепь 27а автоматической регулировки усиления;
- вычитание (фаза 222) пилот-сигнала, переданного в передатчик 21, из сигнала на контактах приемника 21, посредством цепи 27b вычитания для дальнейшего уменьшения компонента перекрестных помех, - в идеальном случае он совпадает с пилот-сигналом;
- усиление (фаза 223) сигнала с убранным компонентом перекрестных помех и выравнивание этого сигнала до уровня амплитуды пилот-сигнала, переданного в передатчик 21, посредством второй цепи 27с автоматической регулировки усиления;
- умножение (фаза 224) сигнала, полученного на фазе усиления, на пилот-сигнал, переданный в передатчик 21, посредством цепи 27d умножения;
- фильтрование (фаза 225) умноженного сигнала посредством фильтра 27е нижних частот, например фильтра Бесселя 4-ого порядка, для извлечения низкочастотного компонента (частоты fВ биений).
На основе полученной указанным способом частоты fB биений оценивают скорость v1 звуковой волны в первой формации 51 (фаза 226), которая является почти независимой от частоты, поскольку предполагается, что первая формация находится под нормальным давлением, и вычисляют глубину потенциальной границы раздела 50 (резкой или плавной) между первой 51 и второй 52 формациями.
В самом деле, частота fВ биений пропорциональна «времени прохождения» τ, необходимого для распространения волны давления от передатчика 21 до границы раздела 50 и возвращения назад в приемник 22, в частотном диапазоне ΔF, используемом в течение времени Т, для звуковой волны давления, переданной передатчиком 21. Математически это записывается так:

Как показано на фиг. 4а, необходимо выполнить по меньшей мере два измерения времени прохождения τА и τВ в двух местах А и В, находящихся на известном расстоянии Δd, чтобы оценить скорость звуковой волны v1 в первой формации 51, посредством формулы  и на основе этой скорости v1 определить расстояние d электроакустического преобразователя 20, а следовательно бура 10, от границы раздела 50 со второй формацией 52, возможно находящейся под другим давлением, по формуле.
и на основе этой скорости v1 определить расстояние d электроакустического преобразователя 20, а следовательно бура 10, от границы раздела 50 со второй формацией 52, возможно находящейся под другим давлением, по формуле.
Фаза генерации вторых звуковых волн давления (фаза 230) предпочтительно включает генерацию в качестве пилот-сигнала непрерывных сигналов одного тона в представляющей интерес полосе частот.
Шаг оценки (фаза 250) множества характеристических параметров указанных двух формаций 51, 52 на границе раздела 50 на основе электрического импеданса на контактах электроакустического преобразователя 20, полученного из фазы вычисления (фаза 240), основан на теоретической модели преобразователя 20 и формаций 51, 52, описанных в остальной части описания и показанных на фиг. 6а.
Теоретическая модель преобразователя: электроакустический преобразователь 20 описывается электромеханической моделью, то есть электрической цепью с компонентами, выбранными путем использования аналогии между электрическими параметрами и механическими параметрами.
Такая цепь «нагружена» на импеданс Zrad излучения, который, как описано в отношении системы 100, зависит от акустических свойств обеих формаций (как первой, в которой расположен электроакустический преобразователь 20, так и второй) глубины d до границы раздела 50 между этими двумя формациями 51, 52 и от отношения между размером (диаметр D) излучающей поверхности передатчика 21 и длиной λ звуковой волны в первой формации.
Более конкретно, соотношение между ΖE и Zrad определяется следующими уравнениями:
Таким образом, импеданс Zrad излучения может быть получен посредством измерения полного электрического импеданса ΖE(ω) на контактах передатчика 21. Такой импеданс может быть измерен непосредственно по отношению между напряжением V и током I, измеренных на контактах передатчика 21.
Кроме того, импеданс Zrad излучения связан с полным акустическим импедансом ZA(ω), «видимого» передатчиком, обращенным к формации 21, согласно следующему уравнению:

Модель формации: формация, представляющая по существу пороупругую среду, предпочтительно моделируется как акустическая линия передачи с потерями и длиной, равной глубине d до границы раздела 50 между этими двумя формациями 51, 52 (модель с единственной плоской волной).
В альтернативных вариантах выполнения настоящего изобретения можно использовать модель, в которой рассмотрено более сложное распространение или, по меньшей мере, не единственная плоская волна.
Акустическая линия передачи имеет первый характеристический импеданс Z1 формации 51, - предполагаемой находящейся при нормальном давлении, - в которой находится бур 10, и заканчивающейся нагрузкой, которая равна второму импедансу Z2 формации 52, находящейся, возможно, под избыточным давлением.
Поэтому акустический импеданс ZA(ω) в свою очередь связан с импедансами Ζ1 и Z2 следующими уравнениями:

где расстояние d от преобразователя до границы раздела 50 получено оценкой, а шаг вычисления (фаза 226) подробно раскрыта выше.
В общем случае волновое сопротивление формации может быть выражено через плотность, скорость и затухание следующим образом:

где плотность ρ, затухание α и скорость v звука могут быть найдены из известных моделей физики пород.
Согласно таким моделям дисперсия звука в формации позволяет обнаружить наличие формаций с избыточным давлением.
Это имеет место, когда скорость v звука сильно зависит от частоты, а затухание α явно выражено, в результате чего характеристический импеданс Ζ формаций становится комплексным и зависит от частоты.
В качестве иллюстрации первая физическая модель пород (модель пороупругой среды, разработанная Биотом (Biot)) моделирует частотные тенденции в затухании и скорости звука посредством множества параметров, которые могут быть сведены к следующим четырем:
- скорость v0 на предельно низкой частоте;
- скорость v∞ на предельно высокой частоте;
- плотность двухфазной среды ρ и
- характеристическая частота ωC;
где нижние индексы «0» и «∞» указывают на значения пределов на низкой (приблизительно 10 Гц) и высокой (приблизительно 10 кГц) частотах, соответственно, а характеристическая частота ωC зависит от вязкости жидкости в порах и от конфигурации самих пор.
Одно возможное описание дисперсии звука в породе при наличии различных давлений, основанное на вышеуказанных параметрах, дается моделью, базирующейся на следующих уравнениях (DM - Дисперсионная модель):


Из такой модели можно заключить, что с падением эффективного давления, равного разности между литостатическим давлением (константа), известным также как пластовое давление, и давлением в порах:
- скорость звука уменьшается;
- частотная вариация v∞-v0 звуковой скорости увеличивается, и
- обратный Q-фактор и, таким образом, пропорциональное ему затухание увеличивается.
По сути, по электрическому импедансу ZE(ω), полученному посредством измерения напряжения V и тока I на контактах передатчика 21 (фаза 240), можно получить подходящий набор параметров (фаза 250), характеризующих эти две формации на границе раздела 50.
Согласно первому варианту выполнения настоящего изобретения параметры, полученные из электрического импеданса ΖE(ω) для обеих формаций 51, 52, следующие:
- скорость (v01, v02) на предельно низкой частоте;
- скорость (v∞1, v∞2) на предельно высокой частоте;
- плотность двухфазной среды (ρ1, ρ2) и
- характеристическая частота (ωC1, ωC2).
Альтернативно, параметры, полученные из электрического импеданса ZE(ω), следующие:
- скорость звука во второй формации (v2);
- плотность (ρ1, ρ2) указанных двух формаций (константа при изменении частоты);
- затухание во второй формации (α2).
Такой набор альтернативных параметров оценивают для каждой частоты в полосе, представляющей интерес.
В частности, следует считать, что скорость v1 звука в первой среде - которую считают константой при изменении частоты, поскольку предполагается, что среда нерассеивающая, - равна полученной при оценке на шаге вычисления (фаза 226), подробно описанном выше, и поэтому затухание α1 в первой формации 51 может быть аппроксимировано нулем. Действительно, в представляющей интерес полосе эффект затухания в одном нерассеивающем слое максимальной толщиной 10 метров можно считать незначительным.
Во второй альтернативе необходимо повторить фазы генерации (фаза 230) вторых звуковых волн давления и измерения (фаза 240) электрического импеданса ZE(ω) по меньшей мере в двух различных местоположениях.
В обеих альтернативах инверсию модели для оценки параметров, представляющих интерес, начинающуюся с измерения электрического импеданса ΖΕ(ω) (фаза 240) и результатов, полученных на шаге оценки и вычисления (фаза 220), или, иначе, скорости v1 звука в первой формации 51 и расстояния d от преобразователя 20 до границы раздела 50, можно выполнить следующими альтернативными способами:
- подбирают параметры модели до тех пор, пока не будет достигнуто хорошее согласие между измеренным электрическим импедансом ZE(ω) и «искусственным» электрическим импедансом, предсказанным исходной моделью; или
- проводят оценку методом наименьших квадратов, взяв за основу значения измеренного электрического импеданса ΖE(ω) и используя в качестве начальных значений параметров предполагаемый набор значений. Для этой цели можно использовать подходящий алгоритм, например алгоритм Левенберга-Марквардта.
Фаза (фаза 260) для оценки, обусловлена или нет обнаруженная аномалия наличием формации с избыточным давлением, дает оценку давления в порах во второй формации 52 согласно двум возможным способам:
- сравнение характеристических параметров этих двух формаций 51, 52, полученных на шаге оценки (фаза 250), с набором или базой данных параметров, полученных преимущественно на лабораторных образцах горных пород при различных давлениях;
- использование подходящей модели физики формации, которая связывает характеристические параметры формаций 51, 52, полученные на шаге оценки (фаза 250), с поровым давлением в формации.
Согласно набору параметров, полученных из электрического импеданса ΖE(ω) (фаза 250), как отмечено выше, параметры для характеризации породы, полученные при выборочных измерениях, альтернативно включают:
- скорость v0 на предельно низкой частоте;
- скорость v∞, на предельно высокой частоте;
- плотность двухфазной среды ρ и
- характеристическую частоту ωC;
или
- частотный профиль скорости звука;
- частотный профиль затухания;
- плотность (константа при изменении частоты).
Из приведенного выше описания очевидны признаки способа и системы для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях согласно настоящему изобретению, а также достигаемые преимущества.
Действительно, несмотря на строгие требования, наложенные на электроакустический преобразователь, описанная система позволяет выявить местоположение границы перед буром с разрешением прогнозирования порядка метра.
Кроме того, инновационные способы обработки полученных сигналов позволяют оценить давление за границей раздела с определенной точностью, что позволяет определить, относится или нет выявленная неоднородность к наличию избыточного давления.
Очевидно, что предложенная система может быть подвергнута многочисленным изменениям и модификациям, все из которых охватываются изобретением, а кроме того, все детали могут быть заменены технически эквивалентными элементами. Используемые на практике материалы, а также размеры могут быть любыми согласно техническим требованиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСТРОЕНИЕ ИЗОБРАЖЕНИЙ ПЛАСТОВ ЗВУКОВОЙ ВОЛНОЙ | 2014 |
|
RU2678248C2 |
| СПОСОБ, СИСТЕМА И СКВАЖИННЫЙ ПРИБОР ДЛЯ ОЦЕНКИ ПРОНИЦАЕМОСТИ ПЛАСТА | 2007 |
|
RU2419819C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛОСТНОСТИ КОЛЬЦЕВОГО УПЛОТНЕНИЯ В СКВАЖИНЕ | 2009 |
|
RU2507391C2 |
| Устройство для электромагнитного каротажа буровой скважины | 1981 |
|
SU1223849A3 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ БЕЗ ИСТОЧНИКА, СПОСОБЫ И СИСТЕМЫ | 2012 |
|
RU2608636C1 |
| МЕТОД И СИСТЕМА ОЦЕНКИ ХАРАКТЕРИСТИЧЕСКИХ СВОЙСТВ ДВУХ КОНТАКТИРУЮЩИХ СРЕД И ПОВЕРХНОСТИ РАЗДЕЛА МЕЖДУ НИМИ С УЧЕТОМ СМЕШАННЫХ ПОВЕРХНОСТНЫХ ВОЛН, РАСПРОСТРАНЯЮЩИХСЯ ВДОЛЬ ПОВЕРХНОСТИ ИХ РАЗДЕЛА | 2008 |
|
RU2439317C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АНАЛИЗА СВОЙСТВ ПОРОДЫ ПРИ ВЫПОЛНЕНИИ ПОДЗЕМНЫХ РАБОТ | 2011 |
|
RU2580872C2 |
| Способ выявления и картирования флюидонасыщенных анизотропных каверново-трещинных коллекторов в межсолевых карбонатных пластах осадочного чехла | 2018 |
|
RU2690089C1 |
| СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ПОТЕНЦИАЛЬНОГО ВОДНОГО ПОТОКА С МАЛОЙ ГЛУБИНОЙ ЗАЛЕГАНИЯ | 2002 |
|
RU2319983C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ СЕНСОРНОГО УСТРОЙСТВА | 2009 |
|
RU2529671C2 |
Настоящее изобретение относится к системе и способу выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях и к системе для осуществления этого способа. Техническим результатом является прогнозирование аномального давления в формациях, которые еще только должны быть пробурены, на расстоянии несколько метров перед буром. Система характеризуется тем, что она содержит бур для бурения формации, электроакустический преобразователь, содержащий передатчик и приемник, интегрированный в указанный бур, при этом указанный электроакустический преобразователь связан с электронным обрабатывающим блоком, предназначенным для: питания указанного электроакустического преобразователя, генерирования посредством электроакустического преобразователя первых звуковых волн давления в направлении оси (А) указанного электроакустического преобразователя и приема отраженного сигнала в виде отраженных первых звуковых волн давления, создаваемых по меньшей мере на одной границе раздела вследствие перехода от первой ко второй, отличной от нее, геологической формации, которые расположены последовательно вдоль направления (А) излучения указанного электроакустического преобразователя, вычисления, на основе указанного принятого отраженного сигнала, скорости (v1) указанных первых генерируемых звуковых волн давления и расстояния (d) между указанным электроакустическим преобразователем и указанной по меньшей мере одной границей раздела, генерирования посредством электроакустического преобразователя вторых звуковых волн давления в направлении указанной оси (А) электроакустического преобразователя и определения электрического импеданса (ZE) на контактах указанного электроакустического преобразователя, оценки, на основе указанного электрического импеданса (ZE), множества характеристических параметров указанных первой и второй геологических формаций и оценки давления в указанной второй геологической формации на основе указанной звуковой скорости (v1) и указанного расстояния (d), а также указанного множества характеристических параметров. 2 н. и 19 з.п. ф-лы, 6 ил.
1. Система (100) для выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, характеризующаяся тем, что она содержит бур (10) для бурения формации, электроакустический преобразователь (20), содержащий передатчик (21) и приемник (22), интегрированный в указанный бур (10), при этом указанный электроакустический преобразователь (20) связан с электронным обрабатывающим блоком (30), предназначенным для:
питания указанного электроакустического преобразователя (20);
генерирования посредством электроакустического преобразователя (20) первых звуковых волн давления в направлении оси (А) указанного электроакустического преобразователя (20) и приема отраженного сигнала в виде отраженных первых звуковых волн давления, создаваемых по меньшей мере на одной границе раздела (50) вследствие перехода от первой (51) ко второй (52), отличной от нее, геологической формации, которые расположены последовательно вдоль направления (А) излучения указанного электроакустического преобразователя (20);
вычисления, на основе указанного принятого отраженного сигнала, скорости (v1) указанных первых генерируемых звуковых волн давления и расстояния (d) между указанным электроакустическим преобразователем (20) и указанной по меньшей мере одной границей раздела (50);
генерирования посредством электроакустического преобразователя (20) вторых звуковых волн давления в направлении указанной оси (А) электроакустического преобразователя (20) и определения электрического импеданса (ZE) на контактах указанного электроакустического преобразователя (20);
оценки, на основе указанного электрического импеданса (ZE), множества характеристических параметров указанных первой (51) и второй (52) геологических формаций; и
оценки давления в указанной второй геологической формации (52) на основе указанной звуковой скорости (v1) и указанного расстояния (d), а также указанного множества характеристических параметров.
2. Система по п. 1, отличающаяся тем, что указанный бур (10) имеет по меньшей мере одну буровую поверхность (12), из которой выступает указанный электроакустический преобразователь (20), при этом электроакустический преобразователь (20) имеет ось (А), по существу перпендикулярную указанной буровой поверхности (12).
3. Система по п. 1 или 2, отличающаяся тем, что указанный передатчик (21) содержит пьезоэлектрический передающий преобразователь (35) для генерации звуковых волн, связанный со средством (34) выработки пилот-сигнала.
4. Система по п. 1 или 2, отличающаяся тем, что указанный приемник (22) содержит пьезоэлектрический приемный преобразователь (29) для приема звуковых волн, связанный с аналоговым средством (27) предварительной обработки принятого сигнала.
5. Система по п. 4, отличающаяся тем, что указанное аналоговое средство (27) предварительной обработки принятого сигнала содержит первую цепь (27а) автоматической регулировки усиления, цепь (27b) вычитания, вторую цепь (27 с) автоматической регулировки усиления, цепь (27d) умножения и фильтр (27е) нижних частот, включенные друг за другом.
6. Система по п. 3, отличающаяся тем, что указанный пьезоэлектрический передающий преобразователь (35) содержит пакет (23) из керамических слоев (23с), каждый из которых снабжен электродами (23d), при этом указанный пакет (23) из керамических слоев (23с) ограничен на первом конце (23а) неподвижной опорой (26) и оканчивается на втором конце (23b) массой (24).
7. Система по п. 6, отличающаяся тем, что указанная масса (24) оканчивается слоем материала, обеспечивающим согласования импеданса с формацией.
8. Система по п. 3, отличающаяся тем, что указанный пьезоэлектрический передающий преобразователь (35) содержит пакет из керамических слоев, каждый из которых снабжен электродами.
9. Система по п. 1 или 2, отличающаяся тем, что указанный пьезоэлектрический приемный преобразователь (29) представляет собой гидрофон, содержащий две керамические полусферы (25), погруженные в масло.
10. Система по п. 9, отличающаяся тем, что указанный пьезоэлектрический приемный преобразователь (29) содержит электронное обрабатывающее средство (28) для предварительного усиления принятого сигнала.
11. Способ (200) выявления аномальных скачков порового давления на границах разделов в непробуренных геологических формациях, характеризующийся тем, что он включает следующие фазы:
- генерирование (210) посредством электроакустического преобразователя (20) первых звуковых волн давления в направлении оси (А) указанного электроакустического преобразователя (20) и прием отраженного сигнала в виде отраженных первых звуковых волн давления, создаваемых по меньшей мере на одной границе раздела (50) вследствие перехода от первой (51) ко второй (52), отличной от нее, геологической формации, которые расположены последовательно вдоль направления (А) излучения указанного электроакустического преобразователя (20);
- на основе указанного принятого отраженного сигнала, вычисления (220) скорости (v1) указанных первых генерируемых звуковых волн давления и расстояния (d) между указанным электроакустическим преобразователем (20) и указанной по меньшей мере одной границей раздела (50);
- генерирование (230) посредством электроакустического преобразователя (20) вторых звуковых волн давления в направлении указанной оси (А) электроакустического преобразователя (20) и определение (240) электрического импеданса (ZE) на контактах указанного электроакустического преобразователя (20);
- оценку (250), на основе указанного электрического импеданса (ZE), множества характеристических параметров указанных первой (51) и второй (52) геологических формаций; и
- оценку (260) давления в указанной второй геологической формации (52) на основе указанной звуковой скорости (v1) и указанного расстояния (d), а также указанного множества характеристических параметров.
12. Способ по п. 11, отличающийся тем, что указанная фаза (210) генерирования первых звуковых волн давления включает генерирование непрерывного сигнала, частота которого меняется со временем.
13. Способ по п. 11 или 12, отличающийся тем, что указанная фаза (220) вычисления на основе принятого отраженного сигнала включает фазу аналоговой предварительной обработки принятого отраженного сигнала, которая включает следующие шаги:
- усиление и выравнивание (221) указанного принятого отраженного сигнала по амплитуде с уровнем пилот-сигнала, переданного в указанный электроакустический преобразователь (20) для генерирования указанных первых звуковых волн давления;
- вычитание (222) указанного пилот-сигнала из указанного принятого отраженного сигнала;
- усиление (223) сигнала, полученного на указанной фазе (222) вычитания, и выравнивание его по амплитуде с уровнем указанного пилот-сигнала;
- умножение (224) сигнала, полученного на указанном шаге (223) усиления, на указанный пилот-сигнал;
- фильтрование (225) умноженного сигнала и извлечение частоты биений (fB) указанного сигнала.
14. Способ по п. 11 или 12, отличающийся тем, что указанная фаза (220) вычисления на основе принятого отраженного сигнала включает следующие шаги:
- выполнение по меньшей мере двух измерений времени прохождения (τA и τB), необходимого, чтобы указанные первые звуковые волны распространились от указанного электроакустического преобразователя (20) к указанной границе раздела (50) и возвратились к указанному электроакустическому преобразователю (20), в двух местоположениях на известном расстоянии (Δd) друг от друга;
- вычисление указанной звуковой скорости (v1) на основе указанных двух измерений времени прохождения (τA и τB) и указанного известного расстояния (Δd) согласно уравнению

- вычисление расстояния (d) между электроакустическим преобразователем (20) и по меньшей мере одной границей раздела (50) на основе указанной звуковой скорости (v1) согласно уравнению
15. Способ по п. 14, отличающийся тем, что указанное измерение времени прохождения (τA и τB) производят на основе указанной частоты биений (fB), определенной на шаге фильтрования (225), согласно уравнению
где ΔF - диапазон частот и Т - длительность указанных первых звуковых волн давления.
16. Способ по п. 11 или 12, отличающийся тем, что указанная фаза (230) генерации вторых звуковых волн давления включает генерирование непрерывного сигнала одного тона в заданной полосе частот.
17. Способ по п. 11 или 12, отличающийся тем, что указанный электрический импеданс (ZE) связан с указанным множеством характеристических параметров указанных первой (51) и второй (52) геологических формаций согласно модели, описываемой следующими уравнениями:

где R0 - электрическое сопротивление утечки, С0 - электрическая емкость, N - коэффициент электромеханической связи, Rm - механическое сопротивление трения, Lm - масса движущейся части преобразователя, Cm - обратная жесткость преобразователя, Сс - обратная жесткость соединительного слоя, Zrad - импеданс излучения, ZA - акустический импеданс, d - расстояние от преобразователя до границы раздела, Z1, Z2 - первый и второй характеристические импедансы, Zi - волновое сопротивление формации, ρ - плотность, α - затухание, ν - скорость звука, ν0 - скорость на предельно низкой частоте, ν∞ - скорость на предельно высокой частоте, ωC - характеристическая частота, Q-1 -обратный Q - фактор, J1 - функция Бесселя первого рода, K1 - функция Струве, E1 - модуль упругости для формации, k1 - волновое число в формации, а - радиус круговой поверхности источника, ν - коэффициент Пуассона для формации.
18. Способ по п. 11 или 12, отличающийся тем, что указанное множество характеристических параметров указанных первой (51) и второй (52) геологических формаций, полученное на указанном шаге (250) оценки, включает:
- скорость (v01, v02) на предельно низкой частоте;
- скорость (v∞1, v∞2) на предельно высокой частоте;
- плотность двухфазной среды (ρ1, ρ2) и
- характеристическую частоту (ωC1, ωC2).
19. Способ по п. 11 или 12, отличающийся тем, что указанное множество характеристических параметров указанных первой (51) и второй (52) геологических формаций, полученное на указанном шаге (250) оценки, включает для каждой частоты, анализируемой в заданной полосе:
- скорость звука (v1, v2);
- плотность (ρ1, ρ2); и
- затухание (α1, α2); при этом
- указанные фазы генерации (230) вторых звуковых волн давления и вычисления (240) электрического импеданса ZE(ω) повторяют по меньшей мере в двух различных местоположениях;
- скорость (v1) звука в первой среде принимают постоянной при изменении частоты и равной значению, полученному на указанной фазе вычисления (220); и
- затухание (α1) считают равным нулю.
20. Способ по п. 11 или 12, отличающийся тем, что указанная фаза (260) оценки давления во второй геологической формации (52) включает сравнение указанного множества характеристических параметров первой (51) и второй (52) геологических формаций с набором характеристических параметров пород при различных давлениях, полученным заранее при лабораторных измерениях.
21. Способ по п. 11 или 12, отличающийся тем, что указанная фаза (260) оценки давления во второй геологической формации (52) включает использование модели физических свойств породы, которая связывает указанное множество характеристических параметров первой (51) и второй (52) геологических формаций с поровым давлением в соответствующей формации (51, 52).
| US 20060175057 А1, 10.08.2006 | |||
| US 6866098 B1, 15.03.2005 | |||
| US 4850449 А1, 25.07.1989 | |||
| US 6029113 A1, 22.02.2000 | |||
| ОХЛАЖДАЮЩЕЕ УСТРОЙСТВО | 2015 |
|
RU2651027C1 |

