УРОВЕНЬ ТЕХНИКИ
Углеводороды, такие как нефть и газ, обычно добываются из подземных пород. Развитие подземных работ и процессы, подразумеваемые в извлечении углеводородов из подземной породы, являются сложными. Типично, подземные работы подразумевают ряд различных этапов, таких как, например, бурение ствола скважины на желательной буровой площадке, обработка ствола скважины, чтобы оптимизировать добычу углеводородов, и выполнение необходимых этапов, чтобы добывать и обрабатывать углеводороды из подземной породы.
Современные нефтепромысловые работы требуют большого объема информации, относящейся к параметрам и условиям, встречающимся в скважине. Такая информация может включать в себя характеристики толщ пород, пересекаемых буровой скважиной, и данные, относящиеся к размеру и конфигурации самой буровой скважины. Сбор информации, относящейся к условиям в скважине, который обычно называется "каротаж", может выполняться несколькими способами, включающими в себя кабельный каротаж, измерение в процессе бурения (MWD), каротаж в процессе бурения (LWD), проводимый в бурильной трубе каротаж и проводимый в колонне гибких труб каротаж. Множество каротажных зондов доступно для использования с каждым из этих способов.
Базовые технические приемы для электромагнитного каротажа для толщ пород хорошо известны. К примеру, индукционный каротаж, чтобы определять удельное сопротивление (или его противоположность, удельную проводимость) толщ пород возле буровой скважины, является одним из технических приемов, используемых в поиске и извлечении углеводородов. Как правило, передатчик передает электромагнитный сигнал, который проходит через вещества породы вокруг буровой скважины и индуцирует сигнал в одном или более приемниках. На свойства принятого сигнала, такие как его амплитуда и/или фаза, влияет удельное сопротивление породы, предоставляя возможность выполнения измерений удельного сопротивления. Измеренные характеристики сигнала и/или свойства породы, вычисленные из них, могут быть записаны как функция глубины зонда или положения в буровой скважине, давая каротажную диаграмму породы, которая может быть использована для анализа породы.
Во время буровых работ важно иметь возможность предвидеть свойства пород впереди бура. Например, нежелательно бурить в зоне с водой высокого давления или в зонах других пород, которые могут мешать выполнению подземных работ. Сейсмические модели и другие подходы, используемые в настоящее время для отслеживания того, что перед буром, такие как традиционные электромагнитные способы, как предложенные, например, в патенте США №6856909, или способ индукции поперечной составляющей, как предложенные, например, в US 2005/0098487, имеют ряд недостатков. К примеру, большая длина волны сейсмической волны ограничивает ее разрешение. То же справедливо для электромагнитного способа. Кроме того, электромагнитный способ требует предварительного знания удельного сопротивления породы, которое может быть недоступно во время процесса бурения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
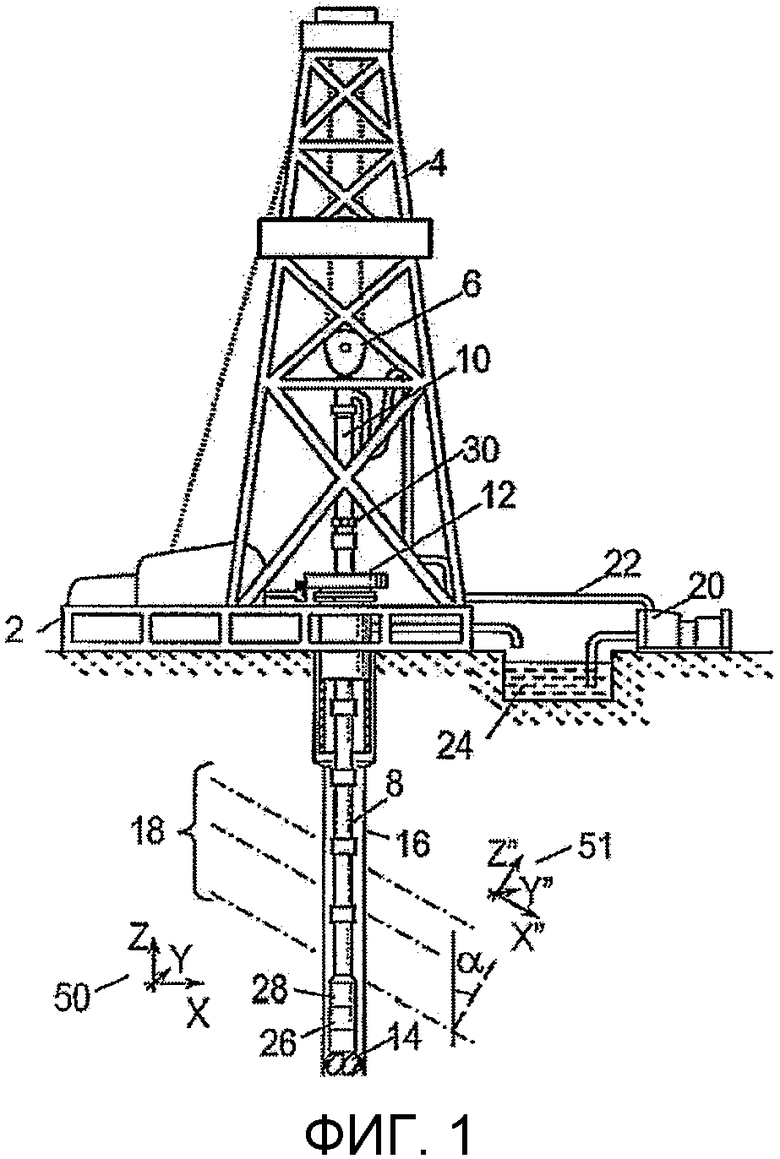
Фиг. 1 показывает иллюстративный каротаж в процессе бурения окружающей среды;
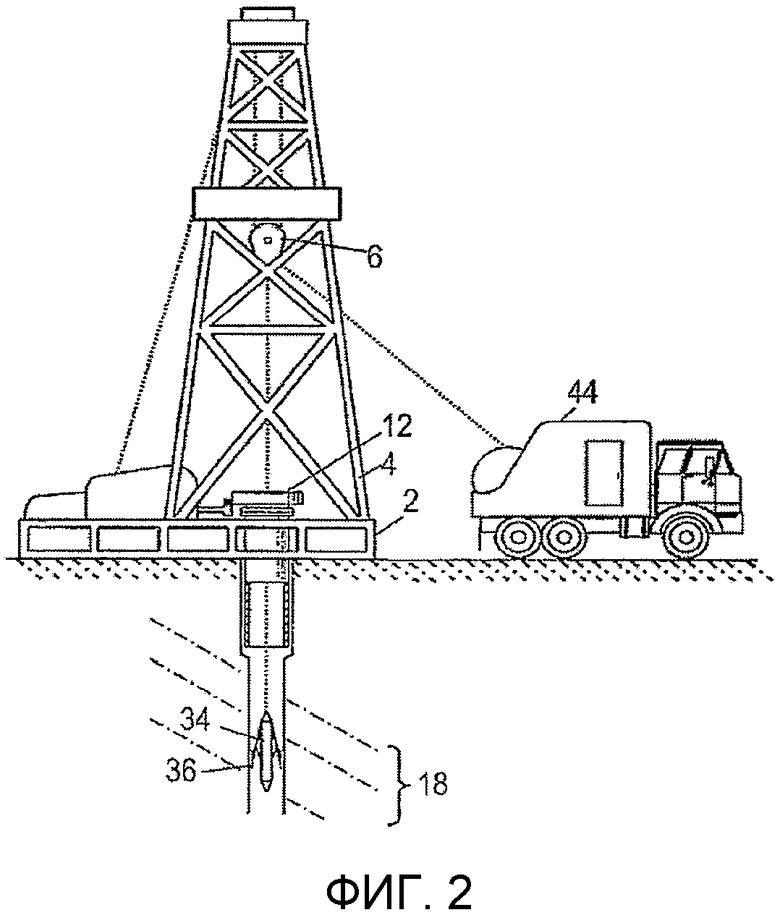
Фиг. 2 показывает иллюстративное окружение кабельного каротажа;
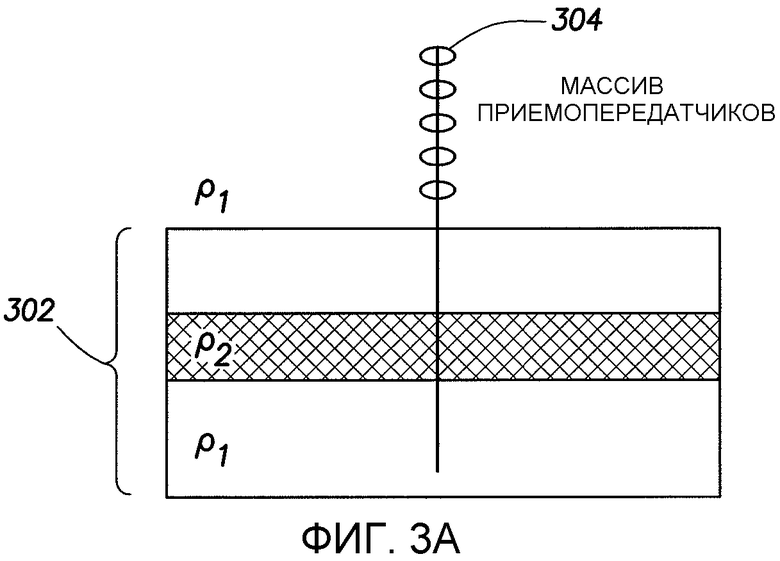
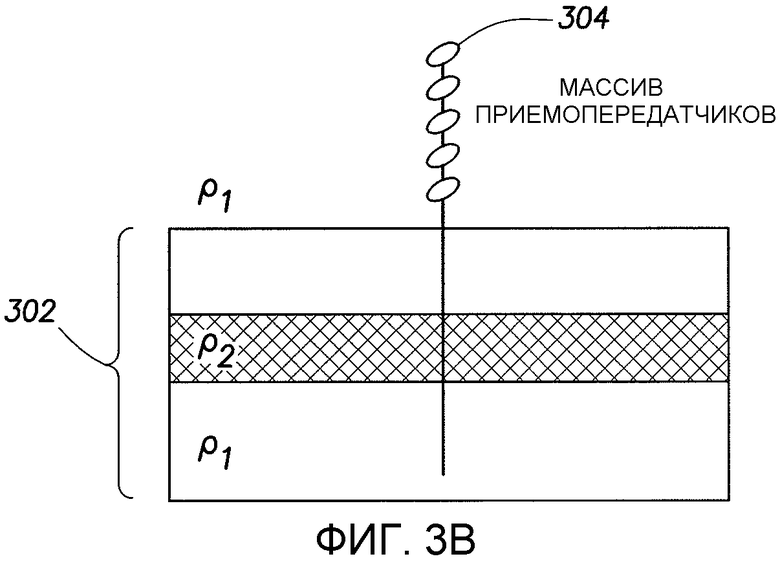
Фиг. 3A и 3B изображают схематичные виды конфигурации пласта породы перед буром в соответствии с примерными вариантами осуществления настоящего изобретения;
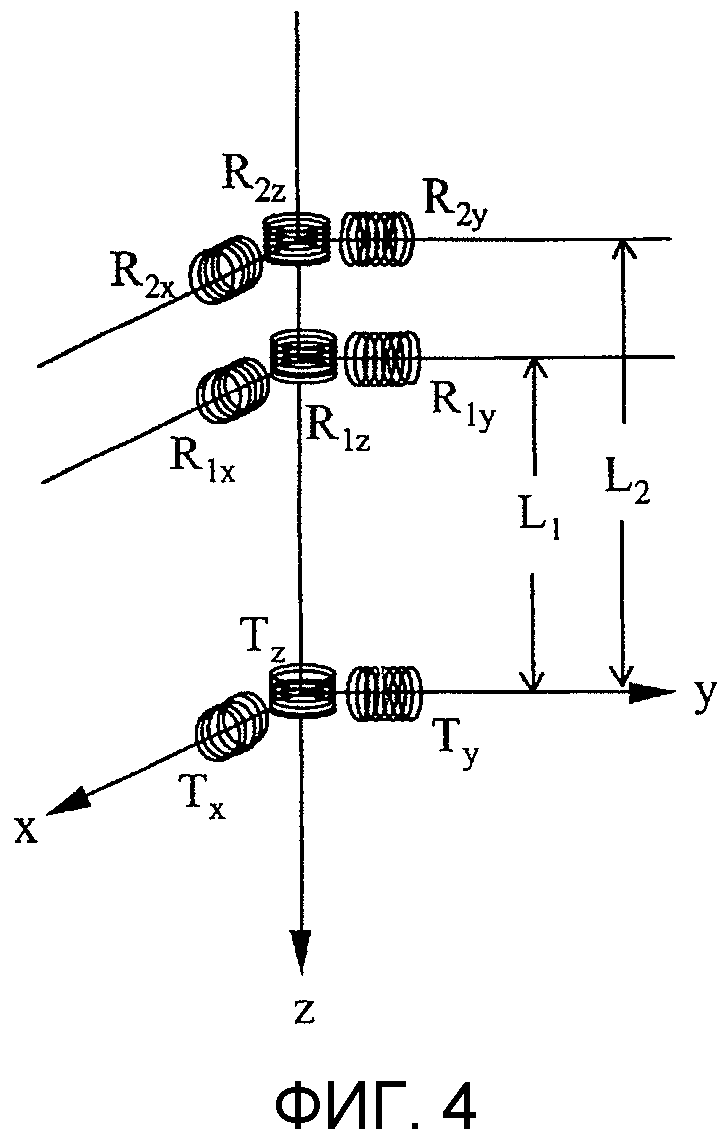
Фиг. 4 показывает конфигурацию катушек трехосного индукционного зонда;
Фиг. 5 показывает трехосный индукционный зонд, расположенный в буровой скважине в наклонных пластах породы;
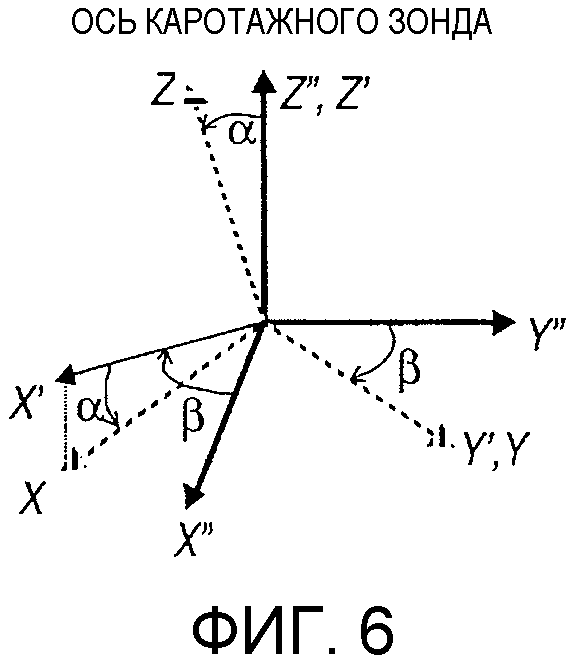
Фиг. 6 демонстрирует определение поворотного преобразования;
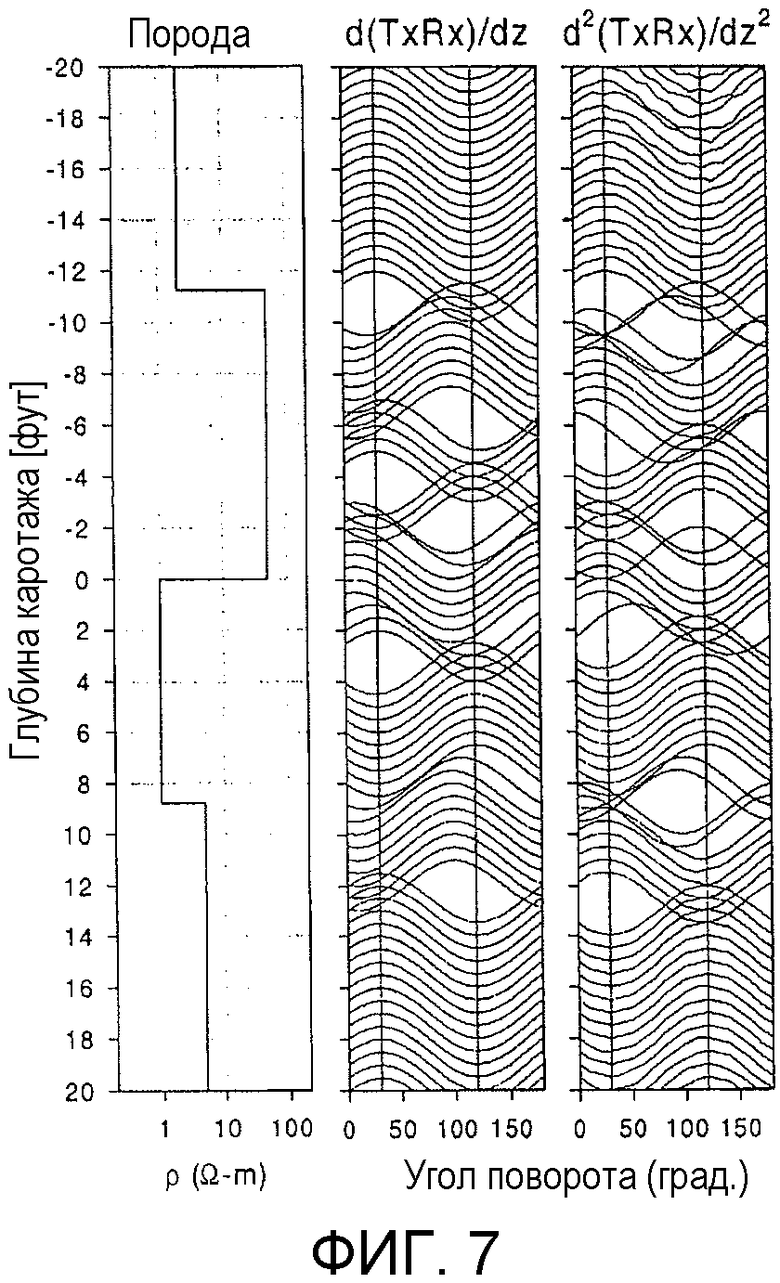
Фиг. 7 показывает график, используемый, чтобы иллюстрировать форму позиционных производных магнитной связи между передатчиком и приемником;
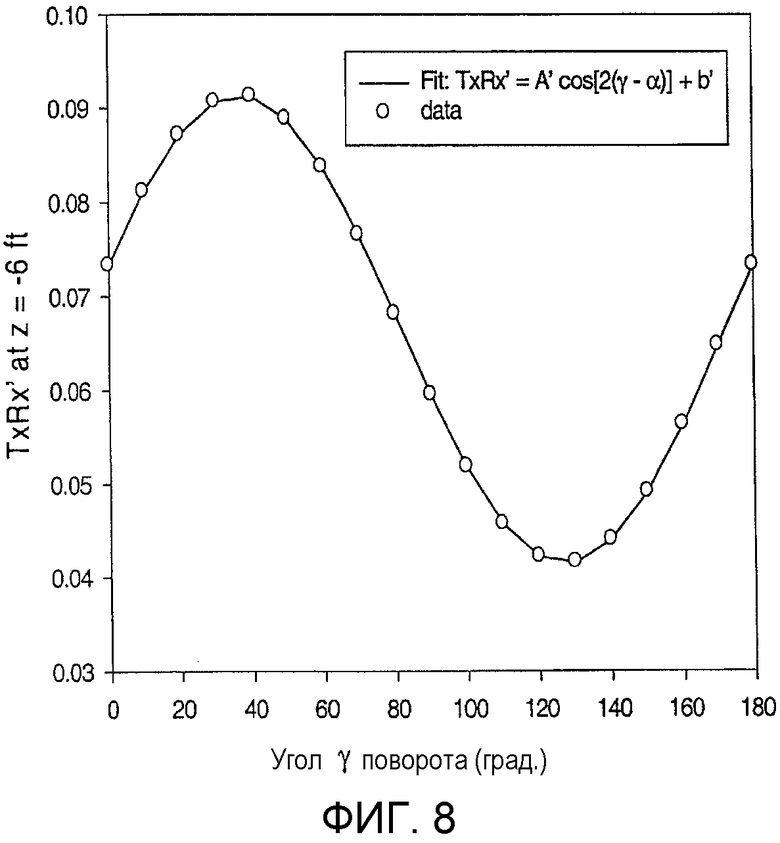
Фиг. 8 показывает кривую минимальной квадратичной ошибки, соответствующую точкам данных позиционной производной;
Фиг. 9 показывает преобразование Хафа (Hough) для точек данных с помощью параметризированной косинусоидной функции;
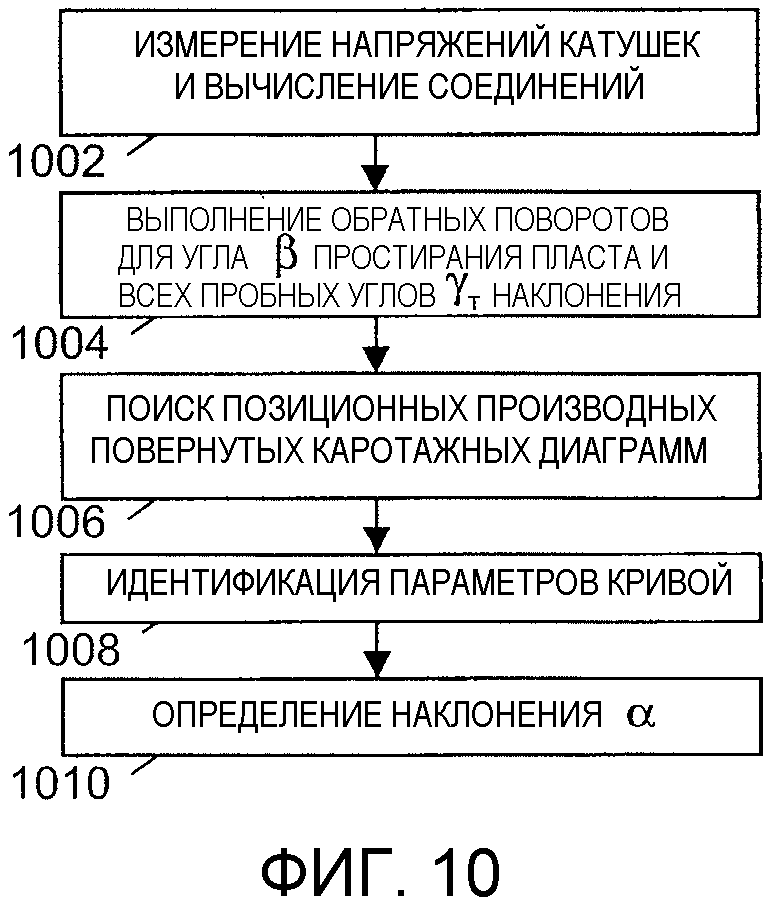
Фиг. 10 показывает блок-схему последовательности операций для раскрытия способа определения углов наклонения в наклонной толще пород;
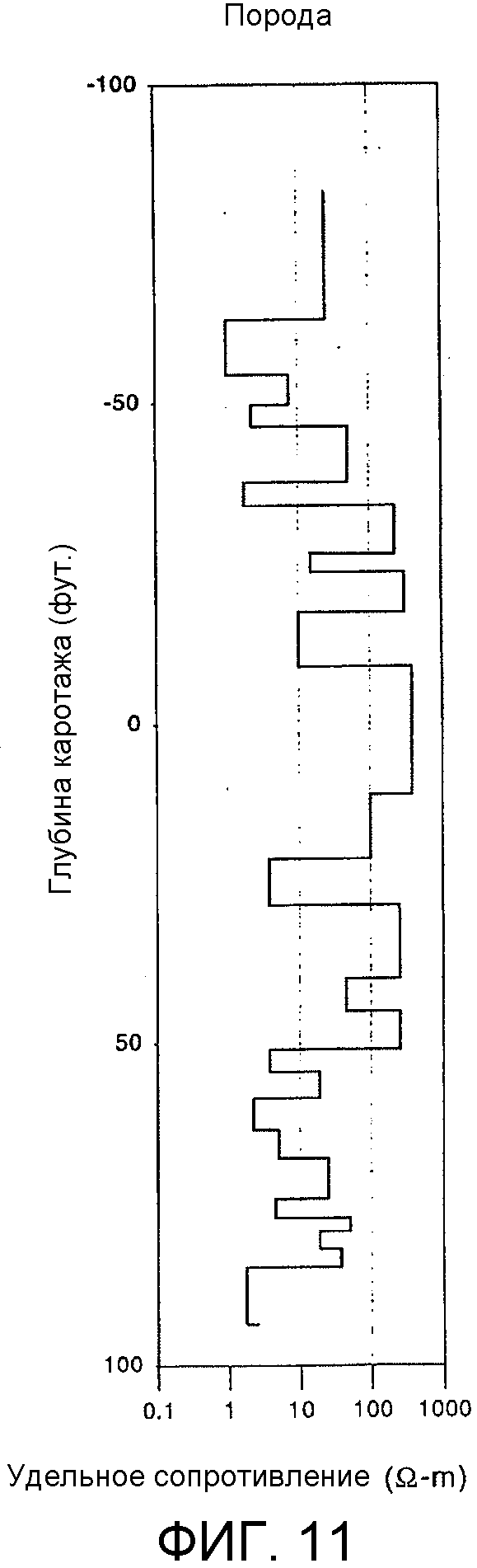
Фиг. 11 показывает диаграмму каротажа сопротивления модели слоистой толщи;
Фиг. 12 показывает диаграмму инклинометрии, вычисленную из первой производной соединения;
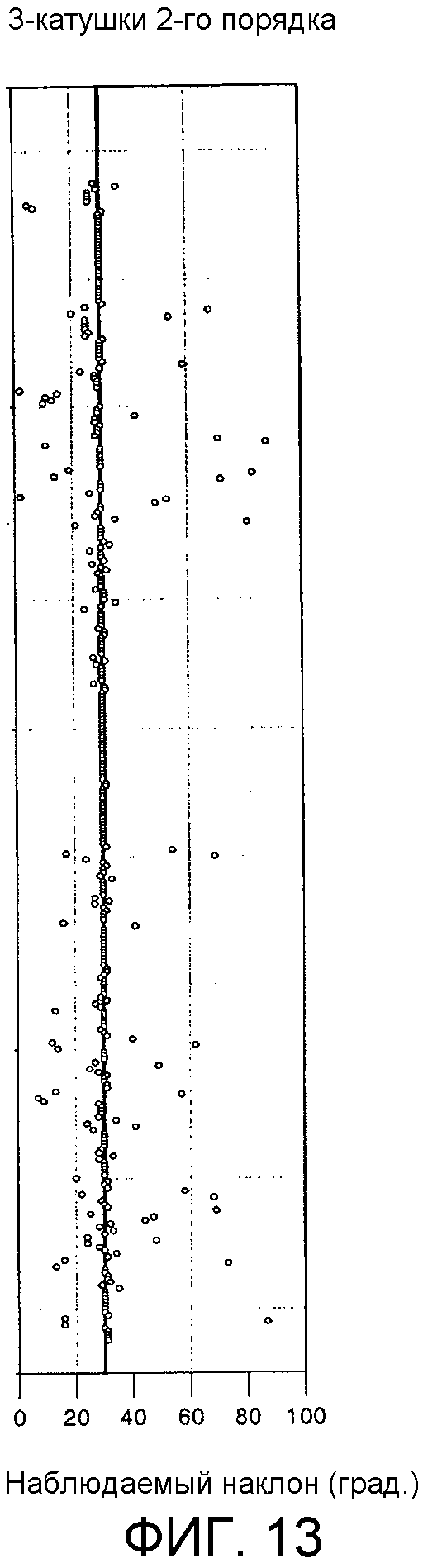
Фиг. 13 показывает диаграмму инклинометрии, вычисленную из второй производной соединения;
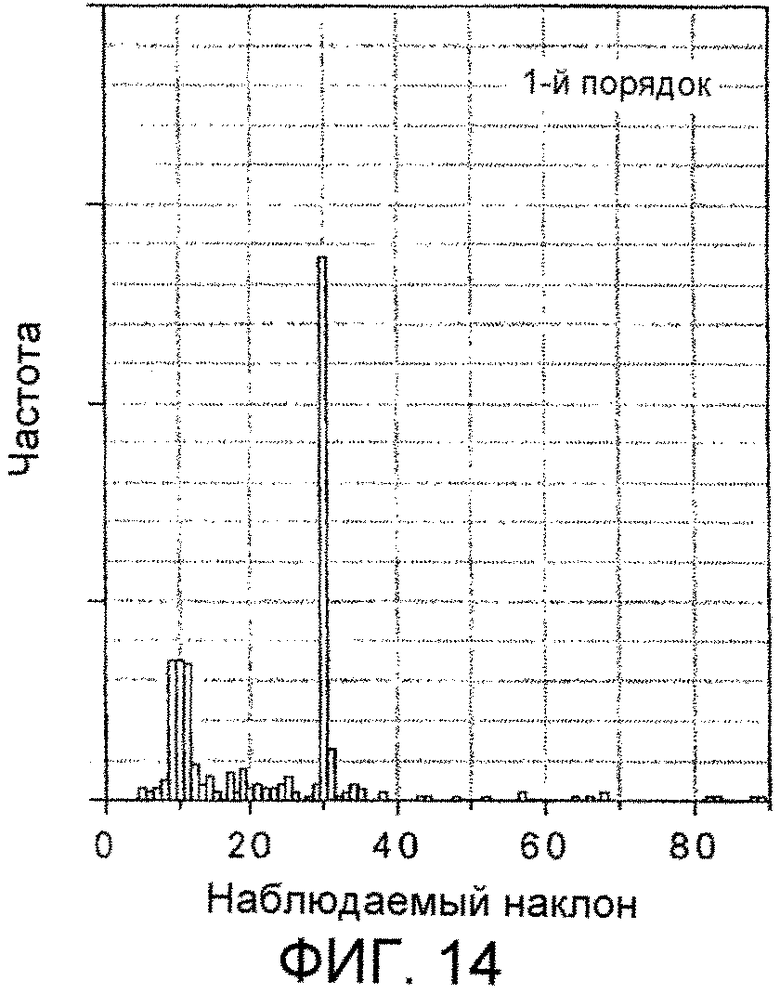
Фиг. 14 показывает гистограмму для диаграммы инклинометрии на Фиг. 12;
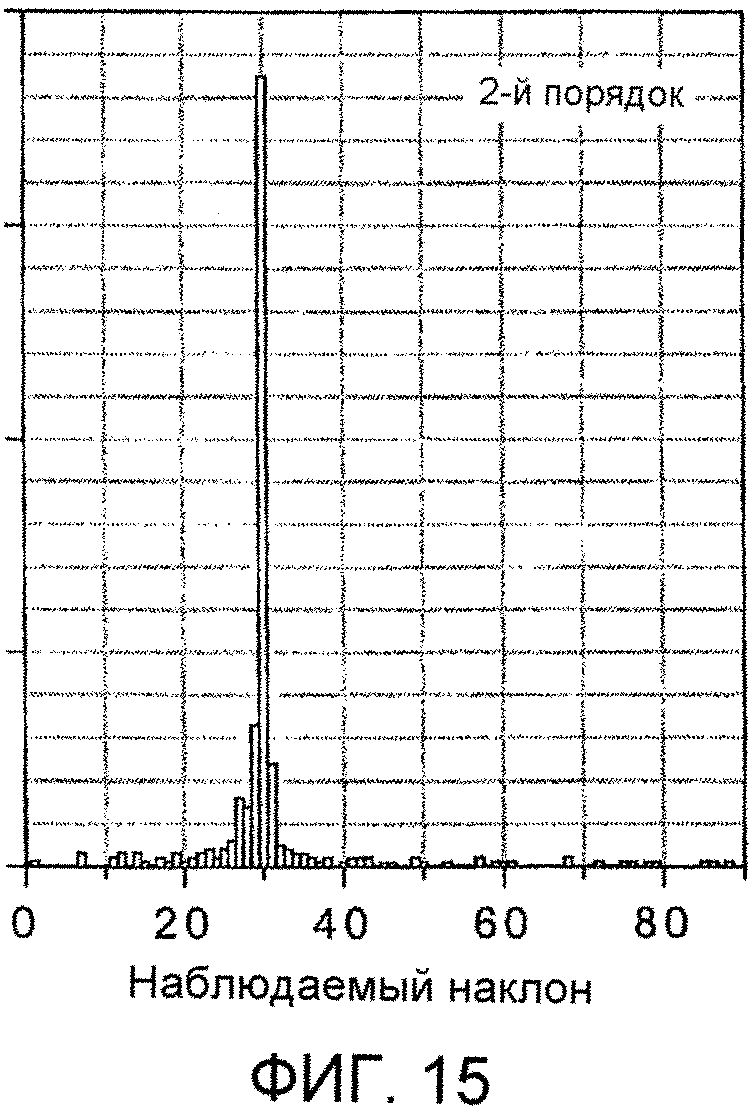
Фиг. 15 показывает гистограмму для диаграммы инклинометрии на Фиг. 13;
Фиг. 16 изображает процедуру для реверсирования времени для выделения границы впереди бура в соответствии с примерным вариантом осуществления настоящего изобретения;
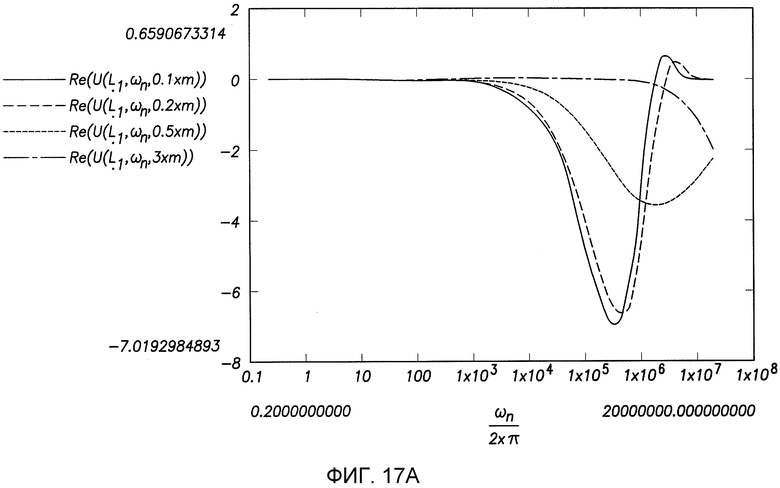
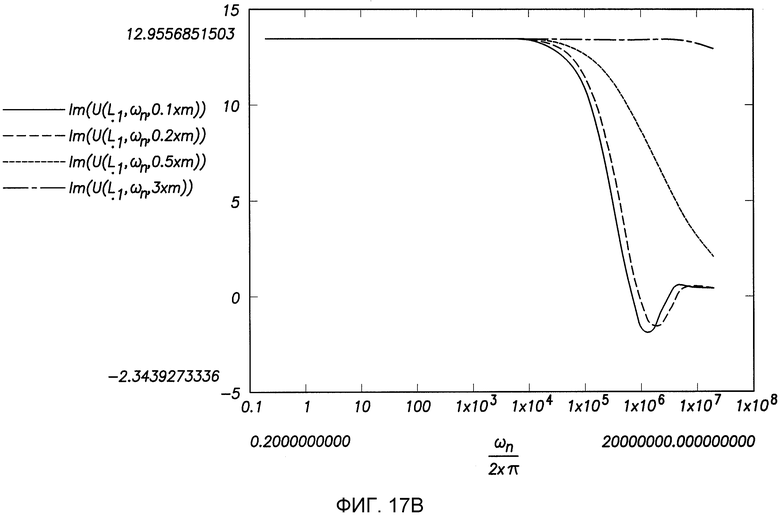
Фиг. 17A и 17B изображают вычисленную реальную и мнимую части, соответственно, второго отраженного сигнала в частотной области как функцию частоты для нескольких расстояний между передатчиком и пластом;
Фиг. 18 изображает разницу между реальной частью второго отраженного сигнала (Z) на расстоянии 3 [м] до пласта и на расстоянии 0,5 [м] до пласта в частотной области; и
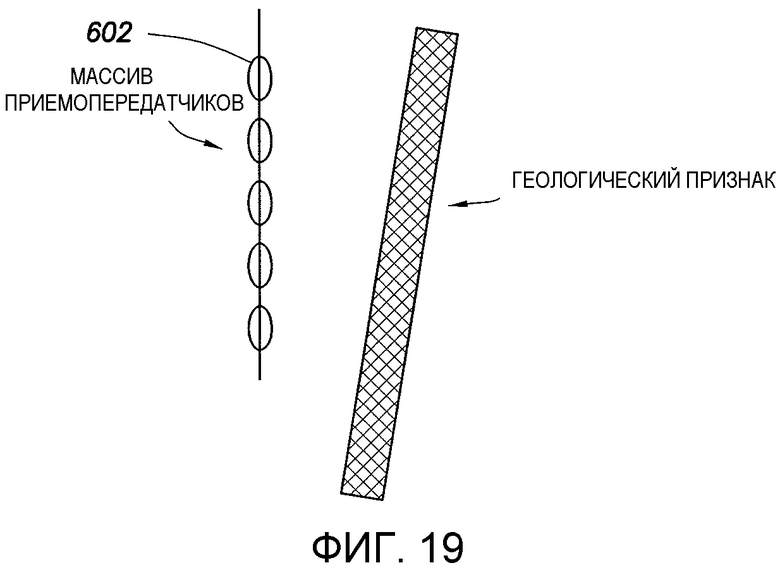
Фиг. 19 изображает схематичный вид конфигурации пласта породы перед буром, где массив приемопередатчиков располагается под углом к геологической породе.
В то время как варианты осуществления этого открытия были изображены и описаны и определены посредством ссылки на примерные варианты осуществления открытия, такие ссылки не предполагают ограничение открытия, и такое ограничение не должно подразумеваться. Раскрытый объект изобретения выполнен с возможностью внесения значительной модификации, изменения и эквивалента по форме и функции, которые придут на ум специалисту в подходящей области техники и имеют пользу этого открытия. Изображенные и описанные варианты осуществления этого открытия являются только примерами и не исчерпывают объем открытия.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для целей этого открытия система обработки информации может включать в себя любое средство или совокупность средств, выполненных с возможностью вычислять, классифицировать, обрабатывать, передавать, принимать, извлекать, создавать, переключать, сохранять, отображать, декларировать, обнаруживать, записывать, воспроизводить, обрабатывать или использовать любую форму информации, сведений или данных для деловых, научных, управляющих или других целей. Например, система обработки информации может быть персональным компьютером, сетевым устройством хранения или любым другим подходящим устройством и может изменяться в размере, форме, производительности, функциональности и цене. Система обработки информации может включать в себя память с произвольным доступом (RAM), один или более обрабатывающих ресурсов, таких как центральное обрабатывающее устройство (CPU), или аппаратная, или программная управляющая логика, ROM и/или другие типы энергонезависимой памяти. Дополнительные компоненты системы обработки информации могут включать в себя один или более дисковых накопителей, один или более сетевых портов для связи с внешними устройствами, также как и различные устройства ввода и вывода (I/O), такие как клавиатура, мышь и видеодисплей. Система обработки информации может также включать в себя одну или более шин, выполненных с возможностью передавать сигналы связи между различными аппаратными компонентами.
Для целей этого открытия машиночитаемые носители могут включать в себя любое средство или совокупность средств, которые могут сохранять данные и/или инструкции в течение периода времени. Машиночитаемые носители могут включать в себя, например, без ограничения, носители хранения, такие как запоминающее устройство с прямым доступом (например, накопитель на жестком диске или накопитель на гибком диске), запоминающее устройство с последовательным доступом (например, ленточный накопитель), компакт-диск, CD-ROM, DVD, RAM, ROM, электрическую стираемую программируемую память только для чтения (EEPROM) и/или флэш-память; а также коммуникационную среду, такую как провода, оптические волокна, микрорадиоволны, радиоволны и другие электромагнитные и/или оптические носители; и/или любую комбинацию вышеупомянутого.
Иллюстративные варианты осуществления настоящего изобретения описываются подробно в данном документе. В интересах ясности не все признаки фактической реализации могут быть описаны в этой спецификации. Конечно, будет понятно, что в разработке любого такого фактического варианта осуществления многочисленные конкретные для реализации решения могут быть выполнены так, чтобы достигать конкретных целей реализации, которые могут изменяться от одной реализации к другой. Кроме того, будет понятно, что такая опытно-конструкторская разработка может быть сложной и продолжительной, но, тем не менее, будет обычной практикой, совершаемой обычным специалистом в данной области техники, имеющим пользу от настоящего открытия.
Чтобы способствовать лучшему пониманию настоящего изобретения, даны следующие примеры некоторых вариантов осуществления. Никоим образом последующие примеры не должны читаться как ограничивающие, или определяющие, объем изобретения. Варианты осуществления настоящего открытия могут быть применимы к горизонтальным, вертикальным, отклоняющимся или другим образом нелинейным стволам скважин в любом типе подземной породы. Варианты осуществления могут быть применимы к нагнетательным скважинам, а также к добывающим скважинам, включающим в себя углеводородные скважины. Варианты осуществления могут быть реализованы с помощью зонда, который сделан подходящим для тестирования, извлечения и отбора образцов вдоль сечений породы. Варианты осуществления могут быть реализованы с зондами, которые, например, могут перемещаться через трубчатую нитку трубопровода или с помощью каротажного кабеля, тросового каната, гибких насосно-компрессорных труб малого диаметра, скважинного робота или т.п. "Измерение в процессе бурения" ("MWD") - это выражение, как правило, используемое для измерения условий в скважине, касающихся перемещения и местоположения бурового снаряда, в то время как бурение продолжается. "Каротаж в процессе бурения" ("LWD") - это выражение, как правило, используемое для аналогичных технических приемов, которые концентрируются больше на измерении параметров породы. Устройства и способы в соответствии с некоторыми вариантами осуществления могут быть использованы в одной или более из кабельных, MWD- и LWD-операций.
Выражения "соединение" или "соединения", когда используются в данном документе, предназначены, чтобы означать либо непрямое, либо прямое соединение. Таким образом, если первое устройство соединяется со вторым устройством, это соединение может быть через прямое соединение или через непрямое механическое или электрическое соединение через другие устройства и соединения. Аналогично, выражение "коммуникационно связанный", как используется в данном документе, предназначен, чтобы означать либо прямое, либо непрямое коммуникационное соединение. Такое соединение может быть проводным или беспроводным соединением, таким как, например, Ethernet или LAN. Такие проводные и беспроводные соединения хорошо известны обычным специалистам в данной области техники и поэтому не будут описаны подробно в данном документе. Таким образом, если первое устройство коммуникативно соединяется со вторым устройством, это соединение может быть через прямое соединение или через непрямое коммуникационное соединение через другие устройства и соединения.
Настоящая заявка направлена на улучшение эффективности подземных работ, а более конкретно на способ и систему для отслеживания того, что перед буром при выполнении буровых работ.
Обращаясь теперь к Фиг. 1, показано оборудование для бурения нефтяных скважин, используемое в иллюстративном LWD-окружении. Буровая платформа 2 поддерживает буровую вышку 4, имеющую талевый блок 6 для подъема и опускания бурильной трубы 8. Ведущая бурильная труба 10 поддерживает бурильную трубу 8, когда она опускается через стол 12 бурового ротора. Головка 14 бура приводится в действие забойным двигателем и/или посредством вращения бурильной трубы 8. Когда бур 14 вращается, он создает буровую скважину 16, которая проходит через различные породы 18. Насос 20 может осуществлять циркуляцию бурового раствора через подающую трубу 22 в ведущую бурильную трубу 10, скважину через внутренность бурильной колонны 8, через отверстия в головке 14 бура, назад на поверхность через затрубное пространство вокруг бурильной колонны 8 и в сточный пруд 24. Буровой раствор переносит выбуренную породу из буровой скважины в пруд 24 и помогает в сохранении целостности буровой скважины.
Каротажный зонд 26 может быть встроен в оборудование нижней части бурильной колонны рядом с буром 14. Каротажный зонд 26 может включать в себя приемники и передатчики. В одних вариантах осуществления каротажный зонд 26 может включать в себя массив приемопередатчиков, которые функционируют и как передатчик, и как приемник. По мере того как бур расширяет буровую скважину через породы, каротажный зонд 26 может собирать измерения, относящиеся к различным свойствам породы, а также к ориентации и положению каротажного зонда и различным другим условиям бурения. Измерения ориентации могут быть выполнены, с помощью указателя азимутальной ориентации, который может включать в себя магнитометры, инклинометры и/или акселерометры, хотя в некоторых вариантах осуществления могут быть использованы другие типы датчиков, такие как гироскопы. Каротажный зонд 26 может принимать форму утяжеленной бурильной трубы, т.е. толстостенной трубы, которая обеспечивает вес и жесткость, чтобы способствовать процессу бурения. Телеметрическая муфта 28 может быть включена в конструкцию, чтобы передавать измерения зонда приемнику 30 на поверхности и принимать команды от приемника 30 на поверхности.
В различные моменты времени в течение процесса бурения бурильная колонна 8 может выниматься из буровой скважины, как показано на Фиг. 2. После того как бурильная колонна была вынута, каротажные работы могут проводиться с помощью зонда 34 кабельного каротажа, т.е. зонда измерительного преобразователя, подвешенного посредством кабеля, имеющего провода для передачи энергии к зонду и телеметрии от зонда на поверхность. Оборудование 44 для каротажа может собирать измерения от каротажного зонда 34 и может включать в себя вычислительные средства для обработки и хранения измерений, собранных каротажным зондом.
Как будет понятно обычному специалисту в данной области техники, с преимуществом этого открытия, электромагнитная волна, распространяющаяся в среде с диэлектрической проницаемостью ε(r) и магнитной проницаемостью µ(r), может быть выражена следующим волновым уравнением:
Это уравнение инвариантно относительно операции реверсирования во времени. В частности, если E(r, t) - это решение, тогда E(r, -t) также будет решением для этого уравнения. Способы и системы, раскрытые в данном документе, используют преимущество инвариантности уравнения (1) относительно реверсирования во времени, как рассматривается более подробно ниже.
Фиг. 3A и 3B изображают схематичный вид конфигурации 302 пласта породы перед бурильной головкой ("бура"). Как будет понятно обычным специалистам в данной области техники, приемопередатчики 304 каротажного зонда 26 могут быть заменены отдельными передатчиками и приемниками для передачи и обнаружения электромагнитных импульсных сигналов. В примерной породе на Фиг. 3 порода содержит первый фрагмент, имеющий удельное сопротивление ρ1, и второй фрагмент, имеющий удельное сопротивление ρ2. Однако, как будет понятно обычным специалистам в данной области техники, с преимуществом этого открытия, способы и системы, раскрытые в данном документе, не ограничены какой-либо конкретной конфигурацией породы.
Фиг. 3A изображает горизонтальные приемопередатчики 304. Однако, в другом примерном варианте осуществления, приемопередатчики 304 могут быть наклонены, как показано на Фиг. 3B. Соответственно, приемопередатчики, используемые совместно со способами и системами, раскрытыми в данном документе, могут быть соосными, наклоненными или горизонтальными приемопередатчиками.
В другом примерном варианте осуществления массив приемопередатчиков может быть виртуально направлен в любую желаемую ориентацию посредством регулировки относительной фазы между парой соосных и горизонтальных приемопередатчиков, как раскрыто в патенте США №6272706 (далее в данном документе "виртуально направляемый приемопередатчик"). Работа виртуально направляемого приемопередатчика далее обсуждается в сочетании с Фиг. 4-15.
Фиг. 4 показывает концептуальный эскиз расположения катушек для скважинного индукционного зонда. Предусмотрена тройка передающих катушек Tx, Ty и Tz, каждая из которых ориентирована вдоль соответствующей оси. Также предусмотрена тройка аналогично ориентированных, сбалансированных пар приемных катушек (R1x, R2x), (R1y, R2y) и (R1z, R2z). Расстояния L1 и L2 между передатчиком и приемником, вместе с множеством витков в каждой приемной катушке, предпочтительно выбираются так, чтобы устанавливать прямое соединение между каждым передатчиком и соответствующей объединенной парой приемников равным нулю. Далее в данном документе каждая из пар приемных катушек будет рассматриваться как единая сбалансированная приемная катушка. Для ясности, предположим, что три катушки в каждой тройке представляют фактические катушки, ориентированные во взаимно перпендикулярных направлениях, с z-осью, соответствующей продольной оси зонда. Однако, отметим, что это расположение катушек может быть "синтезировано" посредством выполнения подходящего преобразования по различным ориентированным тройкам.
Фиг. 5 показывает породу, имеющую последовательность многослойных пластов 102, понижающихся под углом. Ствол 104 скважины, проходящий через пласты 102, показан содержащим индукционный зонд 106. Первая (x, y, z) система координат ассоциирована с пластами 102, а вторая система координат (x′′, y′′, z′′) ассоциирована с индукционным зондом 106. Как показано на Фиг. 6, две системы координат связаны двумя поворотами. Начиная с системы координат (x′′, y′′, z′′) индукционного зонда, первый поворот на угол β выполняется вокруг оси z′′. Результирующая система координат обозначена (x′, y′, z′). Угол β - это угол простирания пласта, который указывает направление наклонения породы. Второй поворот на угол α затем выполняется вокруг оси y′. Это совмещает систему координат с пластами. Угол α - это угол наклонения, который является углом наклона пластов.
Любой вектор в одной из систем координат может быть выражен в значениях другой системы координат с помощью матриц поворотного преобразования. Таким образом, если v′′ является вектором, выраженным в системе координат (x′′, y′′, z′′), он может быть выражен математически в системе координат x, y, z как:
где

Следовательно, приняв измерения в системе координат индукционного зонда, соответствующие измерения в системе координат пластов могут быть определены, если углы наклонения и простирания пласта известны.
Морэн и Гьянзеро, в "Effects of Formation Anisotropy on Resistivity Logging Measurements" Геофизика, том 44, №7, с. 1266 (1979), отмечают, что магнитное поле "h" в приемных катушках может быть представлено в значениях магнитных моментов "m" в передатчиках и матрице "C" связности:

В явно выраженной форме, уравнение (3) является следующим:
Конечно, уравнение (3) также действительно в системе координат индукционного зонда, таким образом:
Соотношение между матрицами C и C′′ связности может быть определено из уравнений (1), (3) и (5), получая:

Индукционный зонд может определять каждый из элементов матрицы C′′ из измерений магнитного поля. Элемент Cij′′ (i,j=x′′, y′′, z′′) матрицы связи вычисляется из:
где RiTj является магнитным полем, измеренным i-м приемником в ответ j-му передатчику, а mj является магнитным моментом j-го передатчика. Если каждый из передатчиков имеет одинаковый магнитный момент m, матрица связности может быть выражена следующим образом:


Отметим, что вследствие изменений в породе как функции глубины, константы связности также являются функциями глубины. Угол простирания пласта может быть определен непосредственно из измеренных сигналов. Например, он может быть вычислен посредством формулы:
Зная угол простирания пласта, может быть выполнен обратный β-поворот. На основе уравнения (6) матрица связности становится следующей:

Соответственно, измерения сигнала позволяют прямое определение матрицы C′′ связности и угла β простирания пласта. Оставшийся угол - это угол α наклонения.
Если угол α наклонения был известен, может быть сделан обратный α-поворот, чтобы определять коэффициенты связности в системе координат пласта. Чтобы определять угол наклонения, предположим угол γ поправки. Когда поворот выполняется вокруг оси y′, матрица связности становится следующей:

Уравнения (10) и (11) представляют виртуальное направление передатчиков и приемников, так что после поворота передатчик и приемники ориентированы в направлении, которое не имеет угла простирания пласта (β=0) и угол наклонения, равный γ.
В изучении характера измерения матрицы  связности было обнаружено, что производные некоторых элементов могут быть использованы, чтобы идентифицировать угол α наклонения. Первая и вторая производные RxTx(γ) в качестве функции глубины z могут обычно быть представлены как следующие:
связности было обнаружено, что производные некоторых элементов могут быть использованы, чтобы идентифицировать угол α наклонения. Первая и вторая производные RxTx(γ) в качестве функции глубины z могут обычно быть представлены как следующие:

где A, B, C и D не являются функциями γ. Производные RzTz(γ) могут также быть представлены в той же форме, хоть и с другими константами. Эта форма не применяется, когда зонд охватывает с двух сторон поверхность между пластами породы.
Фиг. 7 показывает диаграмму удельного сопротивления модели породы, показывающей четыре пласта различных удельных сопротивлений. Рядом с диаграммой каротажа сопротивления находятся графики производных RxTx(γ), подтверждающие форму уравнений (12) и (13). Они вычисляются с помощью ответа обычного 3-катушечного триадного каротажного зонда, когда он входит в наклонный пласт породы, имеющий наклонение 30° и угол простирания пласта 40°. После того как все данные были получены, в каждой точке каротажа каротажный зонд виртуально направляется, чтобы получать производные как функцию угла поворота. Амплитуды производных в каждой позиции каротажа нормализованы и повторно уплотнены согласно глубине в целях вычерчивания графика.
Поскольку форма производных как функции угла γ поправки известна, неизвестные A, B и α или C, D и α могут быть определены, когда производные наносятся на график как функция угла γ поправки. Соответственно, могут быть получены измерения коэффициентов связности, повернутые, чтобы корректировать угол β простирания пласта, и повернутые через последовательность углов γ поправки, чтобы получать каротажные диаграммы глубин RxTx(γ). Может быть предварительно определено множество углов поправки, например, 0°, 10°, 20°, 30°, …, 180°. Каротажные диаграммы глубин могут затем быть дифференцированы относительно глубины, чтобы получать первую и/или вторую производные.
Производные, если нанесены на график как функция угла γ поправки, будут иметь форму уравнений (12), (13). Угол γ наклонения может, следовательно, быть вычислен из производных несколькими способами. Например, простая среднеквадратичная кривая, соответствующая данным, будет работать, как показано на Фиг. 8. Другой способ, который может быть использован, подразумевает преобразование Хафа. Использование преобразования Хафа описано Д. Торесом, Р. Стриклендом и М. Гианзеро в "A New Approach to Determining Dip and Strike Using Borehole Images", SPWLA 31.sup.st Ежегодный симпозиум по скважинным исследованиям, 24-27 июня, 1990 г.
Первое смещение устраняется. В уравнениях (12) и (13) константы B и D представляют смещение. Смещение может, в значительной степени, устраняться посредством идентификации максимальных и минимальных значений и вычитания среднего максимальных и минимальных значений. Таким образом, чистые косинусоидные функции y′(γ) и y′′(γ) могут быть найдены посредством следующих уравнений:

где max и min обозначают максимальное и минимальное значения в интервале 0°≤γ≤180°.
Уравнения (14) и (15) могут быть параметризированы, т.е. одно из неизвестных может быть записано как функция другого неизвестного. Например:
Другими словами, задавая известный угол γ поправки и известное соответствующее значение y′(γ) или y′′(γ), амплитуда A или C является функцией угла α наклонения. Могут быть множественные значения A или C для данного угла наклонения. Каждая комбинация угла γ поправки и соответствующего значения y′(γ) дает различную кривую A(α). Фиг. 9 показывает множество кривых A(α) для девяти различных значений угла γ поправки. Это преобразование Хафа для данных измерений, удовлетворяющих уравнению (14).
Одной проблемой с использованием преобразования Хафа является размер пространства преобразования, которое должно рассматриваться. Когда диапазон параметров увеличивается, вычислительные требования увеличиваются. Ожидается, что диапазон параметра амплитуды может быть ограничен между двойным максимальным значением для y′(γ) и двойным минимальным значением для y′(γ) или между двойными максимумами и минимумами для y′′(γ), когда используется вторая производная.
Отдельный интерес на Фиг. 9 имеют точки пересечения различных кривых. Две точки пересечения представляют значения амплитуды A и угла α наклонения, которые действительны для каждой из точек данных. Соответственно, они определяют кривую, которая проходит через каждую из точек, и значение угла наклонения определено для этой глубины. Хотя существуют два решения, они эквивалентны, т.е. инверсия в амплитуде эквивалентна 180° сдвигу фазы. Соответственно, решение с α>90° может быть игнорировано. Процесс повторяется для каждой глубины каротажа, чтобы получать каротажную диаграмму угла наклонения в зависимости от глубины.
Пересечения могут быть найдены посредством квантования пространства параметров в элементы выборки и подсчета числа кривых, которые проходят через каждый элемент выборки. Элементы выборки с наивысшим числом кривых содержат пересечения. Больше подробностей об использовании преобразований Хафа может быть найдено во многих стандартных справочных текстах.
Фиг. 10 показывает блок-схему последовательности операций этого способа. В блоке 1002 передатчики последовательно возбуждаются, сигналы приемника измеряются, и вычисляются элементы матрицы связности в уравнении (8). В блоке 1004 обратный β-поворот выполняется по матрице связности. Множество корректирующих наклон γ-поворотов затем применяется к матрице, чтобы определять множество выражений (либо RxTx(γ), либо RzTz(γ)) как функцию положения каротажного зонда. В блоке 1006 выбранное множество выражений дифференцируется относительно положения, чтобы определять либо первую, либо вторую производную. В блоке 1008 способ идентификации параметра кривой выполняется по множеству дифференцированных значений. Этим способом может быть аппроксимация кривой, преобразование Хафа или некоторый другой способ. В блоке 1010 идентифицированные параметры кривой используются, чтобы вычислять угол α наклонения. Угол наклонения определяется для каждого положения каротажного зонда в буровой скважине.
Теперь выполняется сравнение результатов использования первой и второй производной, чтобы вычислять угол наклонения. Фиг. 11 показывает кривую каротажа сопротивления модели породы. Модель породы имеет пласты, которые наклонены на 30° поперек ствола скважины. Фиг. 12 показывает угол наклонения, вычисленный для модели породы с помощью первой производной. В окрестностях границ пластов между пластами с низким удельным сопротивлением вычисленный угол отклоняется вниз от истинного уклона, но, как правило, точен для более толстых пластов. Фиг. 13 показывает угол наклонения, вычисленный для той же породы с помощью второй производной. В то время как существует некоторый разброс в окрестностях тонких пластов, вычисление наклонения является, как правило, достаточно точным. Фиг. 14 показывает гистограмму результатов угла наклонения на Фиг. 12, а Фиг. 15 показывает гистограмму результатов угла наклонения на Фиг. 13. Способ первой производной показывает ложный пик при 10°, а также пик при истинном наклоне в 30°. Во второй производной ложный пик отсутствует.
Раскрытый способ может быть использован, чтобы определять местную информацию о наклонении и простирании пласта в скважинах, где условия неблагоприятны для работы традиционных пластовых наклонометров удельного сопротивления или устройств построения изображения по данным метода сопротивлений. Такие условия включают в себя, но не только, скважины, пробуренные с буровым раствором на нефтяной основе, и скважины с очень шероховатыми стволами скважины. Отметим, что раскрытый способ может быть использован как для кабельных работ в скважине, так и для LWD-работ. При LWD-работах способ, в дополнение к определению местного наклонения и простирания пласта, может быть дополнительно использован, чтобы обеспечивать геонавигацию в сильно отклоняющихся и/или горизонтальных скважинах.
Фиг. 16 изображает процедуру для обращения времени для обнаружения границы впереди бура в соответствии с примерным вариантом осуществления настоящего изобретения. Процедура обращения времени, изложенная на Фиг. 16, одинаково применима к электромагнитным волнам и акустическим волнам.
Сначала, на этапе 402, короткий электромагнитный импульс (X) испускается из массива 304 приемопередатчиков. Как обсуждается подробно ниже, этапы способа, раскрытые в данном документе, одинаково применимы к случаям, когда массивом приемопередатчиков первоначально формируется акустическая волна вместо электромагнитной волны. Этот импульс затем отражается границами пласта впереди бура как импульс s(t) во временной области. Массив 304 приемопередатчиков обнаруживает этот первый отраженный сигнал s(t) на этапе 404. Однако, вследствие дисперсии среды, обнаруженный сигнал s(t) типично разбросан во временной области.
В соответствии с примерным вариантом осуществления настоящего открытия обнаруженный сигнал s(t) обращается во времени как s(-t) на этапе 406. Дополнительно, поскольку фрагмент первоначально сформированного сигнала (X) теряется в породе, на этапе 408, в одном варианте осуществления, амплитуда обращенного во времени сигнала s(-t) может регулироваться, чтобы компенсировать эту потерю. Этот обращенный во времени сигнал с откорректированной амплитудой затем повторно передается как новый импульс s(-t) на этапе 410. Сигнал s(-t) затем снова отражается средой как новый отраженный импульс sr(t), который обнаруживается массивом 304 приемопередатчиков как второй отраженный сигнал на этапе 412. Второй отраженный сигнал sr(t) естественно фокусируется, чтобы давать значительно улучшенную точность во временной области. На этапе 414 наблюдается изменение в sr(t) от ранее полученного значения. Процесс затем возвращается к этапу 402, и те же этапы повторяются, чтобы наблюдать изменения в sr(t) со временем, когда бурильная головка проходит через породу.
Для того чтобы наблюдать изменение в принятом, обращенном во времени сигнале sr(t) (далее в данном документе "измеренном сигнале" или "измеренном ответе"), можно сравнивать сигнал с известным, предварительно вычисленным разделением между пластом и передатчиком и информацией о граничных свойствах. Это может быть выполнено, предполагая известное расстояние до границы пласта и известный скачок удельного сопротивления между предстоящим интересующим пластом и породой, окружающей бурильную головку (т.е. текущим пластом). Ожидаемый обращенный во времени ответ каротажного зонда может затем быть вычислен. Далее, вычисленный ответ может быть сравнен с измеренным ответом. Это сравнение может итерационно выполняться непрерывно в процессе выполнения буровых работ. В одном примерном варианте осуществления этот итеративный процесс может продолжаться до тех пор, пока разница между измеренным ответом и вычисленным ответом не будет равна или меньше предварительно заданного, порогового, приемлемого значения ошибки. На основе этого сравнения вычисленного ответа с измеренным ответом, предполагаемые значения для расстояния до границы пласта и скачка удельного сопротивления между текущим пластом и предстоящим пластом могут быть изменены. Когда буровые работы продолжаются и больше измеренных данных поступает в итеративный процесс, интересующая информация, такая как, например, расстояние от предстоящего пласта и его свойства (например, сопротивление для электромагнитных волн, акустический импеданс для акустических волн) дополнительно уточняется.
На Фиг. 17 реакция на приближающийся пласт со скачком удельного сопротивления теоретически вычисляется в частотной области. В частности, Фиг. 17A и 17B изображают вычисленную реальную и мнимую части, соответственно, второго отраженного сигнала sr(t) в частотной области как функцию частоты для нескольких расстояний между передатчиком и пластом. В примерном варианте осуществления, изображенном на Фиг. 17A и 17B, порода 304 имеет первое удельное сопротивление (ρ1) в 100 Ом·м и второе удельное сопротивление (ρ2) в 0,1 Ом·м. Как будет понятно обычным специалистам в области техники, с преимуществом этого открытия, для этих сигналов может быть использовано преобразование Фурье, чтобы создавать импульсную характеристику породы во временной области.
Как будет понятно обычным специалистам в области техники, с преимуществом этого открытия, могут быть видимые различия в обнаруженном сигнале при различных расстояниях от передатчика до пласта. Например, Фиг. 18 изображает различие между реальной частью второго отраженного сигнала sr(t) на расстоянии 3 [м] до пласта и на расстоянии 0,5 [м] до пласта в частотной области.
Как будет понятно обычным специалистам в области техники, с преимуществом этого открытия, способы и системы, раскрытые в данном документе, не ограничены массивами приемопередатчиков с ориентацией, перпендикулярной оси бурового снаряда, как показано на Фиг. 3. Например, Фиг. 19 изображает примерный вариант осуществления, где массив 602 приемопередатчиков располагается под углом к геологической структуре 604. В этом варианте осуществления способы и системы, раскрытые в данном документе, могут использоваться, чтобы обнаруживать боковые границы. Возможность использовать способы и системы, раскрытые в данном документе, с чувствительностью, чтобы обнаруживать боковые границы, имеет особую важность при направлении бурильной головки в горизонтальном стволе скважины.
Дополнительно, хотя настоящие способы раскрыты совместно с электромагнитными волнами, принципы, раскрытые в данном документе, одинаково применимы к другим волновым формам, таким как, например, акустические волны. Например, уравнение акустической волны подчиняется той же симметрии относительно обращения времени. В частности, уравнение акустической волны может использоваться, чтобы описывать поле p(r,t) скалярного давления как:
где p - это акустическое давление (локальное отклонение от атмосферного давления), а c - это скорость звука. Соответственно, приемопередатчик может формировать и принимать акустические волны вместо электромагнитных волн в соответствии с вариантом осуществления настоящего изобретения. Как будет понятно обычным специалистам в области техники, с преимуществом этого открытия, поскольку толща пород менее дисперсная по отношению к акустическим волнам, чем к электромагнитным волнам, использование акустических волн вместо электромагнитных волн может быть желательным в некоторых прикладных задачах. Например, скачок удельного сопротивления может быть небольшим между углеводородосодержащей зоной и водоносной зоной. В отличие от этого, различие в акустическом импедансе между двумя зонами может быть выше, и, следовательно, его легче обнаружить.
Как будет понятно обычным специалистам в области техники, с преимуществом этого открытия, когда потеря сигнала в среде не ничтожная, обращение времени может нарушиться. Однако существуют доказанные способы, которые могут быть использованы, чтобы компенсировать затухание как в принятом сигнале s(t), так и в повторно принятом обращенном во времени сигнале s(-t). Один такой способ раскрыт в "Frequency dispersion compensation in time reversal techniques for UWB electromagnetic waves" Явуз и др., опубликованном в IEEE Geosience and Remote Sensing Letters, т.2, №2, сс. 233-237, 2005 г. Дополнительно, можно использовать преимущество фазовой информации. В частности, работа распространяющего электромагнитные волны LWD-зонда для измерения удельного сопротивления породы, окружающей ствол скважины, основывается на измерении затухания сигнала и сдвига фаз между передатчиком и приемником. Аналогично, информация, содержащаяся в фазовом фрагменте обращенного во времени сигнала, может быть использована в комбинации с его амплитудой, чтобы уточнять измерение.
Как будет понятно специалистам в области техники, с пользой этого открытия, в одном примерном варианте осуществления способы и системы, раскрытые в данном документе, могут быть реализованы с помощью системы обработки информации. В одном варианте осуществления массив приемопередатчиков может быть соединен с возможностью связи с системой обработки информации через проводную или беспроводную сеть. Работа таких систем хорошо известна обычным специалистам в области техники и, следовательно, не будет обсуждаться подробно в данном документе. Система обработки информации может управлять формированием сигналов посредством массива приемопередатчиков и/или обрабатывать обнаруженные сигналы, чтобы анализировать породу впереди бура. В частности, программное обеспечение, включающее в себя инструкции в соответствии со способами, раскрытыми в данном документе, может быть сохранено на машиночитаемых носителях системы обработки информации. Система обработки информации может тогда использовать такие инструкции, чтобы выполнять способы, раскрытые в данном документе. В одном примерном варианте осуществления система обработки информации может сохранять значения измеренного сигнала в каждой итерации, когда она выполняет способы, раскрытые в данном документе. В одном варианте осуществления система обработки информации может включать в себя пользовательский интерфейс, который может предоставлять информацию, касающуюся свойств породы, пользователю в реальном времени.
Настоящее изобретение поэтому хорошо адаптировано, чтобы выполнять задачи и добиваться упомянутых результатов, а также тех результатов, которые свойственны в этом отношении. В то время как изобретение было изображено, описано и определено посредством ссылок на примеры изобретения, такая ссылка не предполагает ограничение на изобретение, и такое ограничение не должно подразумеваться. Изобретение допускает значительную модификацию, изменение и эквиваленты в форме и функции, которые придут на ум обычному специалисту в области техники, имеющему пользу от этого открытия. Изображенные и описанные примеры не исчерпывают изобретение. Следовательно, изобретение предназначено быть ограниченным только духом и объемом прилагаемой формулы изобретения, давая полное понимание эквивалентов во всех аспектах.




Изобретение относится к области геофизики и может быть использовано в процессе добычи углеводородов. В изобретении раскрывается способ анализа подземной породы. Первый сигнал передается от передатчика к породе, а второй сигнал, который является отражением первого сигнала, принимается. Третий сигнал, который является вторым сигналом, обращенным во времени, затем передается к породе. Четвертый сигнал, который является отражением третьего сигнала от породы, затем принимается и отслеживается. Предполагают расстояние до границы пласта. Предполагают скачок удельного сопротивления или скачок акустического импеданса между предстоящим пластом и текущим пластом. Определяют вычисленный сигнал с использованием предположенного расстояния до границы пласта и предположенного скачка удельного сопротивления или предположенного скачка акустического импеданса, соответственно. Также предложена система для осуществления данного способа анализа подземной породы. Технический результат - повышение точности получаемых данных. 2 н. и 15 з.п. ф-лы, 21 ил.
1. Способ анализа подземной породы, содержащий этапы, на которых:
передают первый сигнал от передатчика к породе;
принимают второй сигнал от породы в приемнике;
при этом второй сигнал является отражением первого сигнала от породы;
генерируют третий сигнал,
при этом третий сигнал является вторым сигналом, реверсированным во времени;
передают третий сигнал от передатчика к породе;
принимают четвертый сигнал в приемнике;
при этом четвертый сигнал является отражением третьего сигнала от породы;
отслеживают четвертый сигнал;
предполагают расстояние до границы пласта;
предполагают скачок удельного сопротивления или скачок акустического импеданса между предстоящим пластом и текущим пластом; и
определяют вычисленный сигнал с использованием предположенного расстояния до границы пласта и предположенного скачка удельного сопротивления или предположенного скачка акустического импеданса, соответственно.
2. Способ по п. 1, при этом формирование третьего сигнала дополнительно содержит этап, на котором компенсируют потерю в амплитуде второго сигнала.
3. Способ по п. 1, в котором по меньшей мере один из первого сигнала, второго сигнала, третьего сигнала и четвертого сигнала выбирается из группы, состоящей из электромагнитной волны и акустической волны.
4. Способ по п. 1, в котором первый сигнал является импульсным сигналом.
5. Способ по п. 1, дополнительно содержащий этапы, на которых:
сравнивают четвертый сигнал с вычисленным сигналом;
корректируют по меньшей мере одно из предположенного расстояния до границы пласта и предположенного скачка удельного сопротивления между предстоящим пластом и текущим пластом на основе по меньшей мере частично сравнения четвертого сигнала и вычисленного сигнала.
6. Способ по п. 1, дополнительно содержащий этапы, на которых:
сравнивают четвертый сигнал с вычисленным сигналом;
корректируют по меньшей мере одно из предположенного расстояния до границы пласта и предположенного скачка акустического импеданса между предстоящим пластом и текущим пластом на основе по меньшей мере частично сравнения четвертого сигнала и вычисленного сигнала.
7. Способ по п. 1, в котором анализ подземной породы содержит этап, на котором прогнозируют предстоящий пласт, при этом прогнозирование предстоящего пласта дополнительно содержит этапы, на которых:
сравнивают четвертый сигнал с вычисленным сигналом; и
модифицируют по меньшей мере одно из предполагаемых расстояния до границы пласта, скачка удельного сопротивления или скачка акустического импеданса, если разница между четвертым сигналом и вычисленным сигналом превышает пороговое значение.
8. Способ по п. 7, в котором по меньшей мере один из первого сигнала, второго сигнала, третьего сигнала и четвертого сигнала выбирается из группы, состоящей из электромагнитной волны и акустической волны.
9. Способ по п. 7, в котором генерирование третьего сигнала дополнительно содержит этап, на котором компенсируют потерю в амплитуде второго сигнала.
10. Способ по п. 7, в котором система обработки информации выполняет по меньшей мере одно из определения вычисленного сигнала с использованием предполагаемых свойств породы, сравнения четвертого сигнала с вычисленным сигналом и модификации предполагаемых свойств породы, если различие между четвертым сигналом и вычисленным сигналом превышает пороговое значение.
11. Способ по п. 7, дополнительно содержащий этап, на котором сохраняют четвертый сигнал на машиночитаемых носителях.
12. Способ по п. 7, в котором приемопередатчик формирует по меньшей мере один из первого сигнала и третьего сигнала и принимает по меньшей мере один из второго сигнала и четвертого сигнала.
13. Способ по п. 12, в котором приемопередатчик выбирается из группы, состоящей из соосного приемопередатчика, наклонного приемопередатчика, горизонтального приемопередатчика и виртуально направляемого приемопередатчика.
14. Система для анализа свойств породы, содержащая:
систему обработки информации;
передатчик, размещенный в породе и соединенный с возможностью связи с системой обработки информации;
приемник, размещенный в породе и соединенный с возможностью связи с системой обработки информации;
при этом передатчик передает первый сигнал в ответ на инструкции от системы обработки информации;
при этом приемник принимает второй сигнал, причем второй сигнал является отражением первого сигнала;
при этом приемник передает второй сигнал системе обработки информации;
при этом передатчик передает третий сигнал в ответ на инструкции от системы обработки информации, причем третий сигнал является вторым сигналом, реверсированным во времени;
при этом приемник принимает четвертый сигнал, причем четвертый сигнал является отражением третьего сигнала;
при этом система обработки информации предполагает расстояние до границы пласта; предполагает скачок удельного сопротивления или скачок акустического импеданса между предстоящим пластом и текущим пластом и определяет вычисленный сигнал с использованием предположенного расстояния до границы пласта и предположенного скачка удельного сопротивления или предположенного скачка акустического импеданса, соответственно;
при этом система обработки информации использует четвертый сигнал и вычисленный сигнал, чтобы выполнять по меньшей мере одно из определения свойств предстоящего пласта и определения расстояния до границы пласта.
15. Система по п. 14, в которой передатчик и приемник являются частью приемопередатчика.
16. Система по п. 15, в которой приемопередатчик выбирается из группы, состоящей из соосного приемопередатчика, наклонного приемопередатчика, горизонтального приемопередатчика и виртуально направляемого приемопередатчика.
17. Система по п. 14, в которой по меньшей мере один из первого сигнала, второго сигнала, третьего сигнала и четвертого сигнала выбирается из группы, состоящей из электромагнитной волны и акустической волны.
| US 3939461 A, 17.02.1976 | |||
| WO 2003023450 A1, 20.03.2003 | |||
| WO 2011136760 A1, 03.11.2011 | |||
| СПОСОБ УСТРАНЕНИЯ ПАРАЗИТНОГО ВЛИЯНИЯ ПРОВОДЯЩИХ БУРИЛЬНЫХ ТРУБ НА РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ ПЕРЕХОДНЫХ ЭЛЕКТРОМАГНИТНЫХ СОСТАВЛЯЮЩИХ В ПРОЦЕССЕ БУРЕНИЯ | 2005 |
|
RU2377607C2 |
| Колосниковая решетка | 1927 |
|
SU6923A1 |
| US 5050130 A1,17.09.1991. | |||

