Изобретение относится к области нейромедицины, а именно к аппаратно-компьютерным системокомплексам, которые используют биоинформационные индикаторы в виде сигналов мозга и мышц человека в робототехнических средствах реабилитации людей с нарушениями функции мозга и центральной нервной системы.
Разработка эффективных систем управления исполнительными устройствами, использующих интеллектуальные функции человека, безусловно, относится к наиболее актуальным и динамично развивающимся прикладным направлениям нейронаук, в первую очередь нейрореабилитологии.
На сегодняшний день в этой области основным направлением является разработка робототехнических средств, в которых задачи управления исполнительным устройством решаются с помощью интерфейсов, использующих биоинформационные индикаторы (например, сигналы мышечной активности или данные регистрации активности мозга).
Измеряя степень активации мышечной системы пациента, биоэлектрические устройства для управления робототехническими средствами реабилитации человека позволяют адаптировать интенсивность механической роботизированной ассистенции движениям пользователя, одновременно активируя механизмы биологической обратной связи, что способствует более продуктивному процессу реабилитации.
На настоящий момент известны инвазивные интерфейсы, вживляемые в мозг и тело человека и непосредственно взаимодействующие с нейронами и мышцами.
Самый очевидный недостаток «инвазивных подходов» состоит в том, что при использовании «контактного» варианта интерфейса существует медицинская проблема - большая вероятность инфицирования.
Кроме того, электроды, внедренные в мозг, повреждают ткани, причем разрушение происходит не только в момент введения электрода, но и при его нахождении в мозге, а в месте его внедрения образуется рубцовая ткань, которая ухудшает контакт и, как следствие, техническую эффективность самого интерфейса.
Известны также не инвазивные системы, использующие в своей работе сигналы, снятые внешними электродами и позволяющие измерять степень активации мышечной системы пациента и адаптировать интенсивность механической роботизированной ассистенции движениям пользователя (например, «Муо» (https://www.myo.com/).
Данная система, представляющая собой программно-аппаратный комплекс для регистрации биоэлектрической сигналов от мышц предплечья человека, позволяет осуществлять трансляцию набора движений рукой и передачу их в виде управляющих команд по беспроводному интерфейсу семейства Bluetooth.
Недостатком указанной системы являются ее ограниченные функциональные возможности с точки зрения системной реабилитации неврологического больного.
Известны также биоэлектрические системы для управления робототехническими средствами (получившие название «социальные роботы») расширенного направления реабилитации человека, которые представляют собой робототехническую платформу (зачастую антропоморфную), предназначенную для удовлетворения потребностей человека в общении, социализации, выполнения удаленной работы.
Эти системы технически обеспечивают возможность трансляция управляющих и информационных сигналов различных модальностей (визуальной, аудиальной, тактильной и др.) по направлению от пациента к удаленным объектам.
При этом решается задача социальной реабилитации пациента в плане самообслуживания, однако эти устройства, как правило, решают узкую конкретную задачу и являются только одним из аспектов реабилитационного процесса.
Для решения задачи повышения системности реабилитации людей с ограниченными возможностями необходимо обеспечить не только детектирование, распознавание и усиление биоэлектрических сигналов человеческого организма от мышц и головного мозга, но и трансляцию этих сигналов, в виде управляющих команд, на внешние исполнительные устройства.
Данному требованию частично отвечает система «Мицар-ЭЭГ-Порто» (http://www.mitsar-eeg.ru/page.php?id=portable), основанная на регистрации, измерении и хранении биоэлектрических сигналов от мозга человека в энергонезависимой памяти ЭВМ.
Недостатком указанной системы является то, что она не содержит составной части, выполняющей распознавание биоэлектрических сигналов от мышц человека.
Система также не предусматривает возможности распознавания паттернов мозговой активности и их трансляции в управляющие команды внешнему исполнительному устройству.
Наиболее близкой к предлагаемому техническому решению задачи управления робототехническими средствами реабилитации человека и достигаемому результату является система для регистрации и усиления сигналов биоэлектрической активности от мышц и мозга человека («RHD2000-Series Amplifier Evaluation System») (http://www.intantech.corn/RHD2000_evaluation system.html).
Известная система «RHD2000-Series Amplifier Evaluation System» (прототип) состоит из 1) интерфейсной платы для передачи на персональный компьютер по USB-интерфейсу данных после вторичной цифровой обработки сигналов от мышц и мозга человека; 2) кабеля для передачи по последовательному синхронному интерфейсу цифровых данных с плат усиления мышечных и мозговых сигналов; 3) набора плат для детектирования и усиления сигналов мышечной мозговой активности. Интерфейсная плата способна подключить до 4-х плат усиления.
Недостатками прототипа является то, что данная система обладает низкой вероятностью правильного распознавания паттернов мышечной и мозговой активности человека и низкой эффективностью цифровой фильтрации артефактов, что приводит к некорректной интерпретации сигналов биоэлектрической активности человека.
Кроме того, основным недостатком данной системы является отсутствие средств и функции обеспечения автоматического управления робототехническим средством реабилитации человека.
Задачей, на решение которой направленно предлагаемое изобретение, является разработка системы для автоматического биоэлектрического управления робототехническими средствами реабилитации человека с физическими, интеллектуальными и социальными ограниченными возможностями.
Поставленная задача решается тем, что в системе для регистрации и декодирования биоэлектрической активности мозга и мышц человека, включающей комплекс для детектирования и усиления биоэлектрических сигналов от мышц и от мозга человека; бортовое вычислительное устройство для сохранения и преобразования биоэлектрических сигналов в цифровой код, передаваемый по интерфейсу, и устройство для отображения полученной информации, комплекс для детектирования и усиления биоэлектрических сигналов содержит встроенный микроконтроллер и последовательный асинхронный интерфейс; бортовое вычислительное устройство для сохранения и преобразования биоэлектрических сигналов использует систему на кристалле и содержит процессоры общего назначения и цифровой обработки сигнала; устройство для отображения полученной информации соединено с внешним исполнительным устройством блоком беспроводной связи.
Техническим результатом предлагаемого изобретения является способность системы к распознаванию индивидуальных паттернов мышечной и мозговой активности человека и реконфигурированию для автоматического формирования управляющей команды на внешнее устройство управления робототехническим средством реабилитации человека.
Новизна заявляемого изобретения подтверждается тем, что по доступной научной и практической информации для решения поставленной задачи предлагаемое техническое решение не использовалось, а так как предлагаемое решение обеспечивает наличие свойств, не совпадающих со свойствами известных решений, то оно обладает изобретательским уровнем.
Упомянутые признаки являются существенными, т.к. они необходимы и достаточны для решения поставленной задачи - разработать систему для автоматического управления робототехническими средствами реабилитации человека с физическими, интеллектуальными и социальными ограниченными возможностями.
Существенность отличительных признаков изобретения состоит в том, что достигается новый положительный эффект, а именно в системе для регистрации и декодирования биоэлектрической активности мозга и мышц человека:
- Биоэлектрическое устройство для управления робототехническими средствами реабилитации человека для динамического управления в дискретном или пропорциональном режимах связано с внешним исполнительным устройством с применением биологической обратной связи и одновременно способно формировать управляющие команды посредством сигналов от мышц и от мозга человека.
- Предлагаемая система способна к реконфигурированию для управления одним и тем же внешним исполнительным устройством посредством сигналов от мышц и от мозга, а также наоборот, и способна обучиться и настроиться под конкретного человека, с учетом его анатомических особенностей.
Для этого оптимальное расположение электродов для детектирования сигналов от мышц человека выбирают посредством программной настройки.
- Предлагаемая система также способна параллельно детектировать, усиливать в 4-х каналах сигналы от мышц человека и в 8-ми каналах от мозга человека распознавать по ним не менее 6 типов паттернов мышечной активности с вероятностью не менее 70% и 4 типов паттернов мышечной активности с вероятностью не менее 80%.
- Устройство для обработки биоэлектрических сигналов способно адаптивно устанавливать порог детектирования на основе статистики сигнала от мышц человека в каждом канале и сравнение паттернов, в том числе по частотному профилю и вейвлет коэффициентам осциллограммы.
- За счет программного используемого обеспечения система способна выполнять пространственно-временную фильтрацию и идентификацию всплесков активности мозга, а также ослабление глазных артефактов не менее чем на 20 дБ и миографических артефактов не менее чем на 10 дБ.
Предлагаемая система для регистрации и декодирования биоэлектрической активности мозга и мышц человека отражена на блок-схеме на Фиг. 1, где
1 - набор электродов для снятия мышечных сигналов,
2 - набор электродов для снятия мозговых сигналов,
3 - блок усиления мозговых сигналов,
4 - блок усиления мышечных сигналов,
5 - бортовая вычислительная система (с блоком связи и устройством для отображения полученной информации в виде интерфейса),
6 - шлем для фиксации набора электродов для снятия мозговых сигналов.
Систему для регистрации и декодирования биоэлектрической активности мозга и мышц человека используют следующим образом.
На одно из предплечий человека крепят набор электродов (1) в составе 12 штук. Эти 12 электродов формируют 4 миографических канала. Электромиографические сигналы, принятые электродами (1), по проводам передают в блок (4) для усиления, оцифровки, первичной цифровой обработки сигналов и преобразования в необходимый формат для передачи по асинхронному последовательному протоколу в бортовую вычислительную систему (5).
Для приема электроэнцефалограммных сигналов от мозга человека на голову человека надевают шлем (6), размер которого настраивают под конкретного человека. На шлем крепят набор электродов (2) в составе 10 штук. Эти 10 электродов формируют 8 энцефалограммных каналов. Сигналы, принятые электродами (2), по проводам передают в блок (3) для усиления, оцифровки, первичной цифровой обработки сигналов и преобразования в необходимый формат для передачи по асинхронному последовательному протоколу в бортовую вычислительную систему (5). Бортовая вычислительная система (5) предназначена для вторичной обработки и электромиографических сигналов и электроэнцефалограммных сигналов в составе: обучение устройства под конкретного человека, распознавание до 6-ти паттернов мышечной активности, распознавание до 4-х паттернов мозговой активности, формирование управляющих команд для выбранного числа внешних исполнительных устройств.
После установки всех необходимых электродов и соединения всех блоков нового устройства прилагаемыми кабелями включают питание на каждом из блоков нового устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система нейрореабилитации и способ нейрореабилитации | 2020 |
|
RU2741215C1 |
| Цифровой обучающий комплекс для подготовки к перспективным профессиям в области нейрофизиологии | 2019 |
|
RU2698994C1 |
| Система и способ реабилитации (восстановления) обоняния и вкуса, а также коррекции эмоциональных и когнитивных расстройств с применением интерфейса мозг-компьютер | 2021 |
|
RU2768172C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ПОСЛЕ ИНСУЛЬТА ИЛИ ТРАВМЫ С ИСПОЛЬЗОВАНИЕМ РОБОТИЗИРОВАННОГО КОМПЛЕКСА, ВКЛЮЧАЮЩЕГО ЭКЗОСКЕЛЕТ КОНЕЧНОСТИ ЧЕЛОВЕКА, УПРАВЛЯЕМЫЙ ЧЕРЕЗ ИНТЕРФЕЙС МОЗГ-КОМПЬЮТЕР ПОСРЕДСТВОМ ВООБРАЖЕНИЯ ДВИЖЕНИЙ | 2015 |
|
RU2622206C2 |
| Система и способ формирования команд управления на основании биоэлектрических данных оператора | 2018 |
|
RU2738197C2 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ МОЗГ-КОМПЬЮТЕР | 2019 |
|
RU2704497C1 |
| Устройство для портативной беспроводной регистрации электрической активности головного мозга | 2017 |
|
RU2693217C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ ДВИГАТЕЛЬНОЙ ФУНКЦИИ ВЕРХНЕЙ КОНЕЧНОСТИ У БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2020 |
|
RU2741221C1 |

Изобретение относится к медицинской технике, а именно к аппаратно-компьютерным системокомплексам, которые используют биоинформационные индикаторы в виде сигналов мозга и мышц человека в робототехнических средствах реабилитации людей с нарушениями функции мозга и центральной нервной системы. Система для регистрации и декодирования биоэлектрической активности мозга и мышц человека содержит электроды для снятия мышечных сигналов, подключенные через восемь энцефалограммных каналов к блоку усиления мышечных сигналов, электроды для снятия мозговых сигналов, подключенные через четыре миографических канала к блоку усиления мозговых сигналов и закрепленные на шлеме для фиксации электродов для снятия мозговых сигналов, при этом блок усиления мышечных сигналов и блок усиления мозговых сигналов выполнены с возможностью передачи сигнала по асинхронному последовательному протоколу в вычислительную систему, выполненную на кристалле для цифровой обработки сигнала и снабженную блоком беспроводной связи с внешним исполнительным устройством робототехнического средства реабилитации человека. Использование изобретения позволяет расширить арсенал средств для регистрации и декодирования биоэлектрической активности мозга и мышц человека. 3 з.п. ф-лы, 1 ил.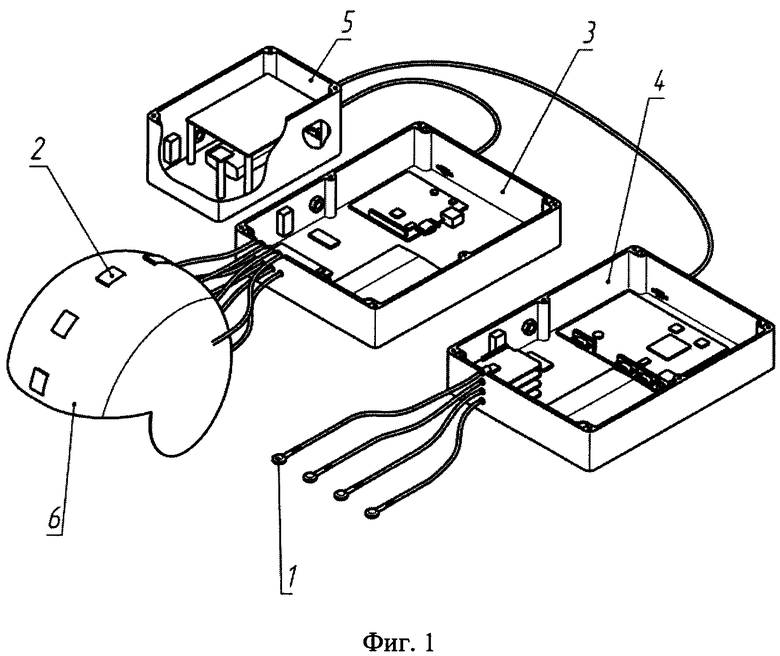
1. Система для регистрации и декодирования биоэлектрической активности мозга и мышц человека, содержащая электроды для снятия мышечных сигналов, подключенные через восемь энцефалограммных каналов к блоку усиления мышечных сигналов, электроды для снятия мозговых сигналов, подключенные через четыре миографических канала к блоку усиления мозговых сигналов и закрепленные на шлеме для фиксации электродов для снятия мозговых сигналов, при этом блок усиления мышечных сигналов и блок усиления мозговых сигналов выполнены с возможностью передачи сигнала по асинхронному последовательному протоколу в вычислительную систему, выполненную на кристалле для цифровой обработки сигнала и снабженную блоком беспроводной связи с внешним исполнительным устройством робототехнического средства реабилитации человека.
2. Система по п. 1, отличающаяся тем, что включает 12 электродов для снятия мышечной активности.
3. Система по п. 1, отличающаяся тем, что включает 10 электродов для снятия мозговой активности.
4. Система по п. 1, отличающаяся тем, что вычислительная система соединена с устройством для отображения информации.
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 2016140834 A1, 19.05.2016 | |||
| US 2008004904 A1, 03.01.2008 | |||
| US 2005187677 A1, 25.08.2005 | |||
| US 2011285527 A1, 24.11.2011 | |||
| КАПЛАН А.Я | |||
| и др | |||
| Экспериментально-теоретические основания и практические реализации технологии "Интерфейс мозг - компьютер", Бюллетень сибирской медицины, 2013, т.12, N2, с.21-29 | |||
| СПОСОБ КЛАССИФИКАЦИИ ЭЛЕКТРОЭНЦЕФАЛОГРАФИЧЕСКИХ СИГНАЛОВ В ИНТЕРФЕЙСЕ МОЗГ - КОМПЬЮТЕР | 2009 |
|
RU2415642C1 |

