Изобретение относится к биофизике и медицинской технике, и может быть использовано для управления техническими устройствами, например, специальными техническими устройствами, такими, как биоэлектрические протезы, электронные импланты, экзоскелеты; или другими техническими устройствами - компьютером, игровой приставкой и другими.
Управление - переведение системы из состояния А в состояние Б путем управляющего воздействия. Как правило, данное воздействие осуществляется малыми массами и энергиями на объект большой массы и энергии.
Принцип действия биоэлектрических протезов основан на том, что после ампутации на культе остается часть мускулатуры, которая может сокращаться. Это приводит к появлению в мышце электрического потенциала, который считывается и передается на микропроцессор протеза.
Экзоскелет - устройство, предназначенное для восполнения утраченных функций, увеличения силы мышц человека и расширения амплитуды движений за счет внешнего каркаса и приводящих элементов.
Робототехнические устройства - устройства, включающие роботов, рабочие органы роботов, а также машины, оборудование, устройства и датчики, поддерживающие роботов во время работы.
Электронейрография - это метод исследования скорости проведения электрического импульса по нервам.
Сигнал электромиограммы - сигнал, полученный в результате сокращения мышцы, возникающий как следствие двигательных намерений человека, характеризует биоэлектрическую активность мышц.
Развитие нейробиологии, нейрохирургии, микроэлектроники и технологий цифровой обработки сигналов создает возможности практической реализации нейроуправляемых систем управления биотехническими устройствами.
В последние годы различные робототехнические устройства все шире внедряются в сферу медицины. Это связано с развитием соответствующей элементной базы мехатронных и сенсорных устройств, разработкой биологически безопасных материалов, а также методов получения/обработки информации о состоянии отдельных органов человека.
При разработке био- или нейроуправляемых биотехнических устройств в первую очередь необходимо определить способ получения информации о совершаемом движении.
В современных биотехнических средствах типа систем взаимодействия человек - компьютер (Human Computer Interaction - HCI) для этого используют биопотенциалы: электроэнцефалограммы (ЭЭГ), электромиограммы (ЭМГ), электронейрограммы (ЭНГ), электроокулограммы (ЭОГ).
Наибольшее распространение получило использование электромиограммы.
Миография - это регистрация сократительной деятельности мышцы. Простейший способ графической регистрации мышечного сокращения - механическая запись с помощью рычага, свободный конец которого пишет на ленте миографа соответствующую кривую - миограмму. Помимо таких механических миографов, используются и оптические, регистрирующие работу мышцы на светочувствительной пленке или бумаге. Миографы разных конструкций обеспечивают регистрацию изотонических или изометрических сокращений мышц. Наиболее совершенным является метод измерения колебаний напряжения мышцы с помощью датчиков, преобразующих механические изменения в электрические, регистрируемые на осциллографе. Таким способом удается регистрировать сокращения отдельных мышечных клеток. Метод миография в сочетании с другими физиологическими методами позволяет изучить основные закономерности сократительной функции мышц.
Электромиография - это метод исследования биоэлектрических потенциалов, возникающих в скелетных мышцах человека и животных при возбуждении мышечных волокон; регистрация электрической активности мышечных волокон.
Электромиографию используют для электрофизиологической диагностики поражений нервно-мышечной системы.
Различают спонтанную электромиограмму, отражающую состояние мышц в покое или при мышечном напряжении (произвольном или синергическом), а также вызванную, обусловленную электрической стимуляцией мышцы или нерва. Электромиография позволяет проводить топическую диагностику поражения нервной и мышечной систем (надсегментарных пирамидных и экстрапирамидных структур, мотонейронов передних рогов, спинномозговых корешков и нервов, нервно-мышечного синапса и собственно иннервируемой мышцы), оценивать тяжесть, стадию, течение заболевания, эффективность применяемой терапии.
Известно, что начало мышечного сокращения инициируется электрическими импульсами в нервных стволах, приходящих в мышечные волокна. Эти импульсы деполяризуют мембрану мышечных клеток, в результате чего в мышечных волокнах создается потенциал действия, который быстро распространяется по нервному волокну и приводит к его сокращению. Причем сокращение лишь инициируется этим потенциалом действия, а сам процесс сокращения гораздо длительнее. Используя игольчатые (инвазивные) или поверхностные электроды, можно зарегистрировать сумму потенциалов действия всех вовлеченных в процесс клеток. Этот сигнал называется сигналом электромиограммы (ЭМГ) [De Luca, Carlo (2006), Electromyography. Encyclopedia of Medical Devices and Instrumentation, Second Edition, Volume 3. John Wiley Publisher, pp. 98-109]. Последующая обработка и извлечение информативных признаков из ЭМГ позволяет реализовать управление техническими устройствами, например, биоэлектрическими протезами. [Alter, Ralph (1966), Bioelectric Control of Prostheses, Technical Report: Massachusetts Institute of Technology, Research Laboratory of Electronics].
Создание таких устройств особенно перспективно для восстановления движений после ампутаций и параличей, когда остаточная биоэлектрическая активность усеченных или парализованных мышц естественным образом используется для управления движениями протеза или ортопедического аппарата.
При этом поверхностные или имплантированные электроды культи в результате электрической активности мышцы формируют поступающие на усилитель электрические сигналы, позволяющие получать данные о виде совершаемого движения. Эти данные преобразуются в соответствующие управляющие сигналы исполнительных механизмов искусственной конечности. Очевидно, что для создания качественных протезов с био- и нейроэлектрическим управлением необходим качественный и стабильный сигнал.
Известны способы электромиографического управления протезом (RU №2108768, 1995 г; DE №2354885, 1972 г; RU №2508078, 2010 г; US №5888213, 1999 г; FR №2957245, 2011 г)
Недостатком всех известных способов электромиографического управления протезами является то, что сигналы деполяризации от стимулированных одновременно мышц накладываются, поэтому получить сигнал ЭМГ об активности конкретной мышцы крайне тяжело. Кроме того, влияние перекрестных (интерференционных) помех от соседних мышц возрастает с ростом расстояния между измерительными электродами.
При этом, сигналы ЭМГ хорошо отражают начало мышечного сокращения, но не дают истинного представления о характере движения мышцы при сокращении.
Кроме того, хотя сигнал ЭМГ один из самых простых электрофизиологических сигналов для измерения, но он же является одним из самых трудных для количественной интерпретации. Поэтому для распознавания различных движений по сигналам ЭМГ необходимо увеличивать количество электродных систем, накладываемых на мышцу, что не всегда возможно, например, при больших уровнях ампутации.
Известны способы определения сократительной способности мышцы, которая регистрируется при контроле нейромышечной функции (уровня нейромышечной блокады) во время наркоза. Методика оценки основана на использовании диагностической электронейростимуляции. (Гехт, Коломенская, Строков, 1974; Воронович, Шалатонина, 1979; Старобинец, Волкова, 1981; Молла-Заде, Зенков, 1984). Для этой цели производят раздражение скелетных мышц импульсами электрического тока. Интенсивность вызванного внешней стимуляцией мышечного ответа отражает состояние нейромышечной передачи и, соответственно, влияние миорелаксантов.
Наиболее близким к предложенному способу можно считать способ бионического управления движением технического устройства (WO №2012150500, 2012 г), согласно которому осуществляют формирование управляющего сигнала посредством регистрации электрофизиологического сигнала с мышцы, обработку его, поступление в блок-управления и затем на исполнительный механизм.
Недостатки известного способа, как и вышеупомянутых, состоят в том, что управляющий сигнал формируется лишь на основании биоэлектрической активности самих мышц, возникающей как следствие двигательных намерений пользователя протеза.
В технической литературе имеется упоминание о формировании управляющего сигнала посредством регистрации импеданса при сокращении мышцы. (Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles. Edited by John.H. Bowker, et. al. Mosby Year Book, 1992, раздел: Dudley S et. al, Upper-Limb Prosthetics. Sources of inputs to prosthesis controllers.)
Однако, сигналы электрического импеданса чувствительны к артефактам движения, которые возникают, например, при смещении электродов в процессе использование протеза (если с помощью протеза поднимают тяжелый предмет - то приемная гильза с электродами может сместиться вдоль культи).
Кроме того, формирование управляющего воздействия посредством регистрации только импедансного сигнала может приводить к появлению «ложных» движений - таких, которые не хотел совершать инвалид (оператор). Причина - возможное смещение мышц друг относительно друга в процессе выполнения движения. Например, если расположить электродную систему у локтя вдоль мышцы разгибателя пальцев и совершить движение «разгибание руки в локте» - импедансный сигнал с мышцы разгибателя пальцев изменится так, как будто было выполнено движение «разгибание пальцев». В данном примере отличить движение «разгибание пальцев» от «разгибание руки в локте» используя только сигнал импеданса сложно. Однако, используя дополнительно сигнал ЭМГ, зарегистрированный с той же самой электродной системы - можно. Начало движения «разгибание пальцев» будет сопровождаться увеличением амплитуды сигнала ЭМГ в области мышцы разгибателя пальцев. Движение «разгибание руки в локте» не изменит сигнал ЭМГ, регистрируемый в области мышцы разгибатель пальцев.
Таким образом, использование сигнала электромиограммы позволяет четко определить начало события (начало движения), и, тем самым, снизить вероятность определения «ложных» движений.
Следует отметить, что сигнал ЭМГ хорошо отражает начало мышечного сокращения, но не дает представления о характере движения мышцы при сокращении, не позволяет оценить «само движение мышцы» во времени.
Технической проблемой, решаемой в настоящем изобретении, является обеспечение возможности получения качественного и стабильного управляющего сигнала, за счет совместного использования сигнала импеданса и сигнала ЭМГ.
Технический результат в данном случае состоит в обеспечении возможности получения управляющего сигнала, основанного на надежном определении момента начала сокращения мышцы и последующей регистрации сокращения этой мышцы во времени.
В этом случае стало возможно не только зафиксировать истинное начало сокращения, но и отследить, зарегистрировать и превратить в управляющий сигнал «само движение мышцы» во времени. Известные способы снятия биопотенциалов с мышцы с помощью ЭМГ-датчиков, фиксируют лишь начало сокращения.
Для решения указанной технической проблемы предложен способ бионического управления техническим устройством, включающий формирование управляющего воздействия посредством регистрации сигнала электрического импеданса с сокращающейся мышцы при пропускании через нее переменного электрического тока, и одновременной регистрации сигнала электромиограммы сокращающейся мышцы, их обработки, подачи в блок управления и затем на исполнительный механизм, при этом управляющее воздействие формируют, используя оба сигнала совместно.
Предпочтительно, что пропускают электрический ток с частотой от 10 кГц до 100 МГц и амплитудой от 0,01 до 10 мА.
Предпочтительно, что электрический ток пропускают с использованием токовых электродов, расположенных на поверхности кожных покровов или в глубине тканей.
Предпочтительно, что диапазон частот сигнала электромиограммы составляет от 50 до 400 Гц.
Предпочтительно, что для регистрации сигнала электрического импеданса и одновременно сигнала электромиограммы используют импедансный измерительный преобразователь.
Предпочтительно, что в качестве технического устройства используют протез верхней или нижней конечности.
Предпочтительно, что в качестве технического устройства используют компьютер.
Предпочтительно, что в качестве технического устройства используют игровую приставку.
Предпочтительно, что в качестве технического устройства используют робототехническое устройство.
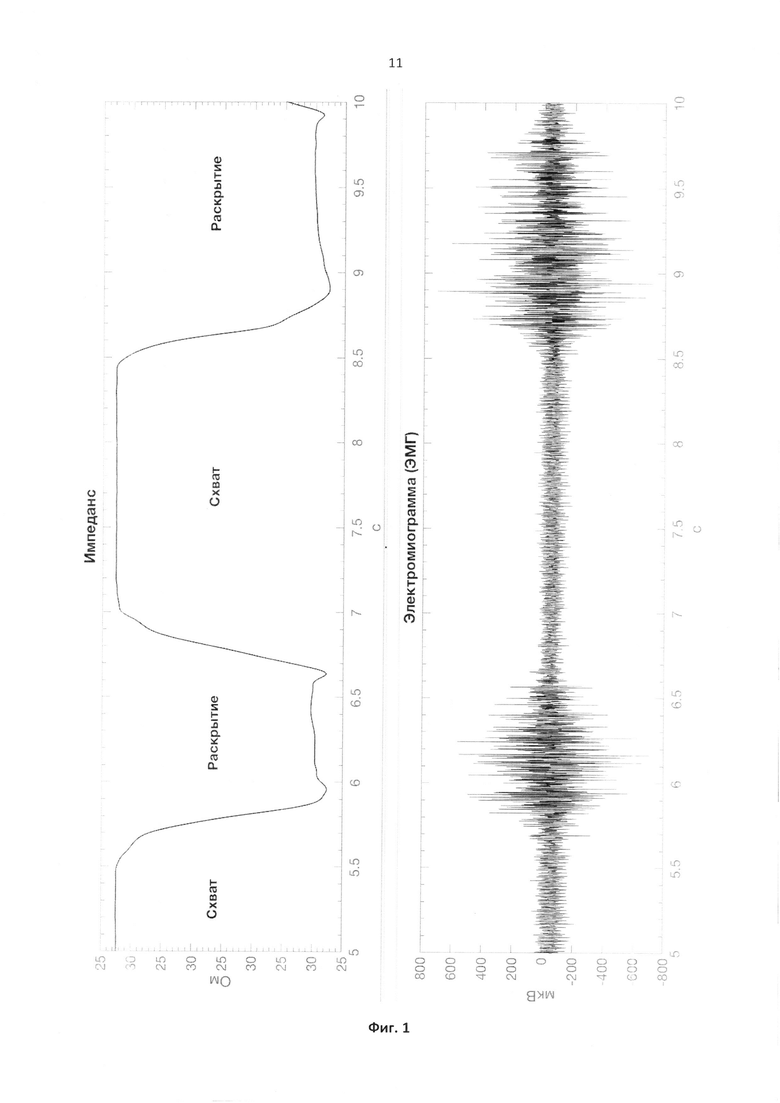
На приложенных к заявке чертежах: на фиг. 1 показаны графики синхронной регистрации электрического импеданса и сигнала электромиограммы (ЭМГ) с электродов, расположенных на поверхности кожи над мышцей разгибателем пальцев при выполнении последовательности движений «раскрытие кисти - схват кисти»;
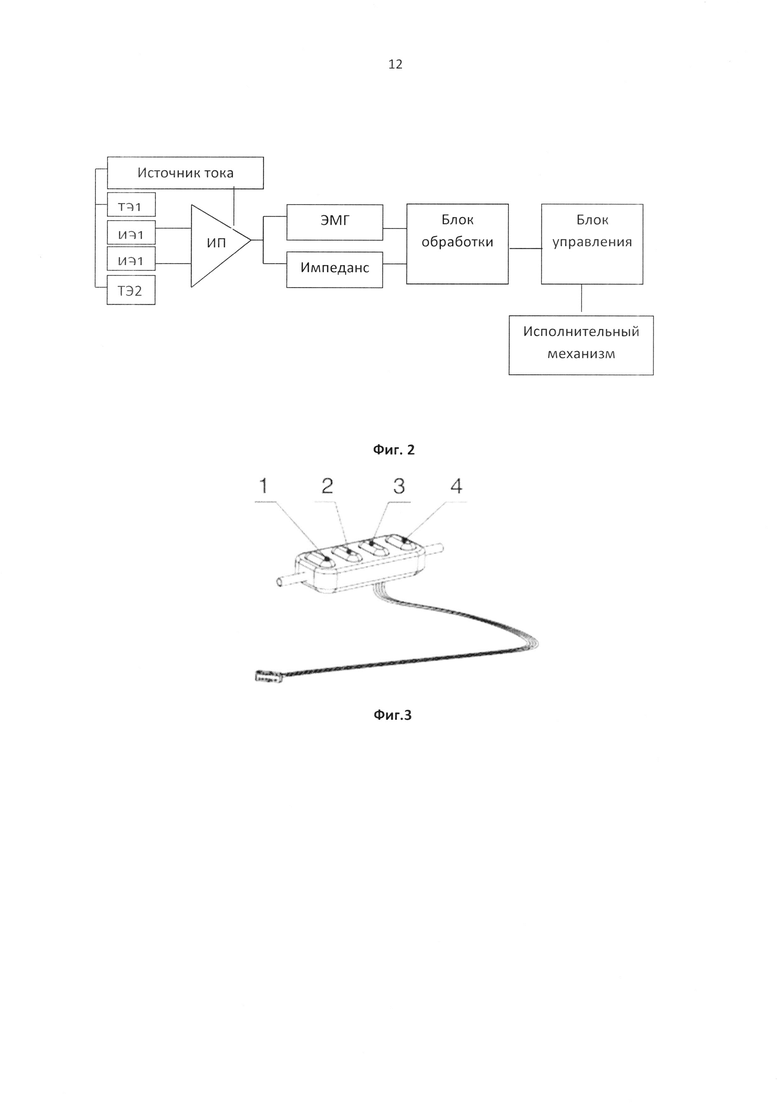
На фиг. 2 - приведена разработанная авторами схема устройства для бионического управления, где ТЭ - токовый электрод, ИЭ - измерительный электрод. ИП -измерительный преобразователь.
На фиг. 3 - показана разработанная авторами электродная система для совместной регистрации сигнала ЭМГ и импеданса, представляющая собой основание (из резины или пластмассы) на котором закреплены четыре электрода. Через электроды 1 и 4 подается ток (токовые электроды), а напряжение измеряется как разность потенциалов между электродами 2 и 3 (потенциальные электроды). С этих же электродов регистрируется ЭМГ.
на фиг. 4 - показана схема реализации предложенного способа,
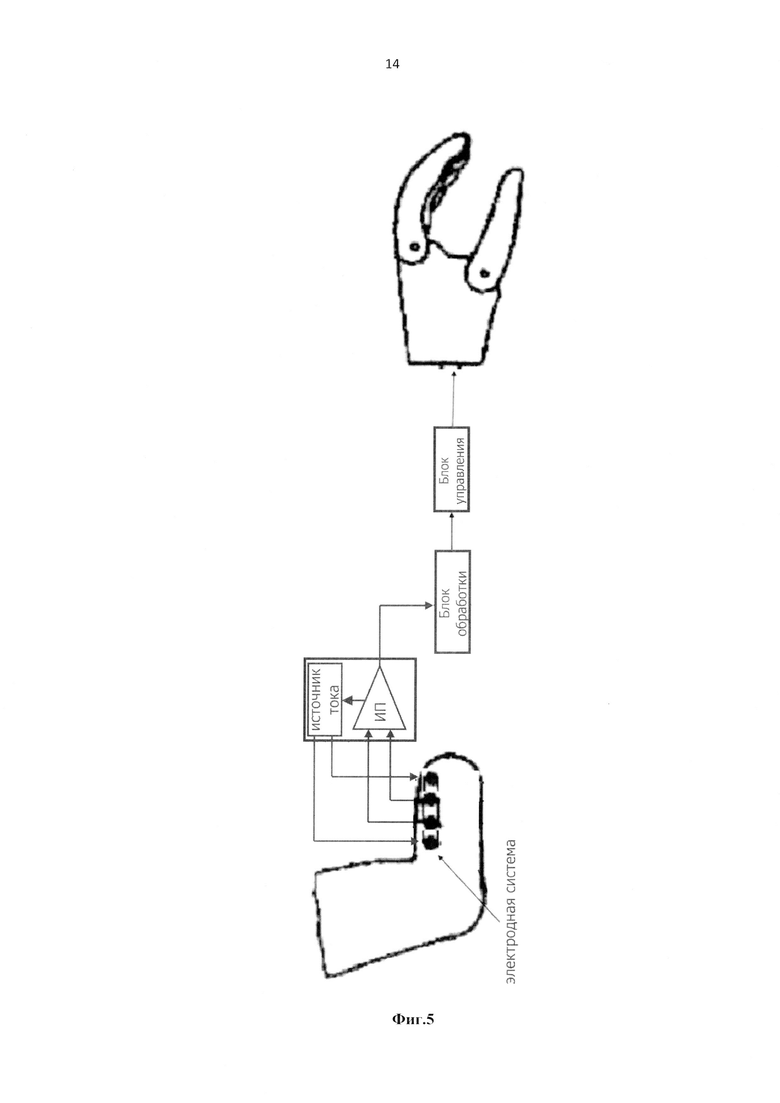
на фиг. 5 - схематично показано устройство для бионического управления протезом кисти.
Способ реализуют в соответствие со схемой, показанной на фиг. 4.
Микропроцессор генерирует управляющие сигналы на источник тока, который пропускает переменный электрический ток (частота 100 кГц, амплитуда 3 мА) через токовые электроды, расположенные на поверхности кожных покровов над мышцей.
Напряжение на потенциальных электродах, которое регистрирует входной усилитель, представляет собой алгебраическую сумму синфазной помехи, сигнала ЭМГ и амплитудно-модулированного напряжения на частоте 100 кГц, возникающее как разность потенциалов от воздействия источника тока (сигнал электрического импеданса). Основное назначение входного усилителя - подавление синфазной помехи.
Сигнал ЭМГ отделяется от сигнала электрического импеданса полосовым фильтром с полосой пропускания от 50 Гц до 400 Гц (фильтр ЭМГ-канала). Амплитудно-модулированный сигнал электрического импеданса отделяется от сигнала ЭМГ полосовым фильтром с полосой пропускания от 10 кГц до 1 МГц (фильтр канала импеданса) и детектируется синхронным детектором. Для работы синхронного детектора в качестве несущей опорной частоты микропроцессор генерирует тот же опорный сигнал, что и для соответствующего источника тока. После дополнительного усиления, оба канала оцифровываются аналогово-цифровым преобразователем (АЦП).
Одним из возможных вариантов использования предложенного способа может служить устройство для бионического управления протезом кисти, которое состоит из: одной тетраполярной электродной системы (фиг. 3); импедансного измерительного преобразователя; блока обработки; блока управления и исполнительного механизма - протеза кисти, как показано на фиг. 5.
Электродная система (фиг. 3) располагается на культе ниже локтя, в проекции сохранившейся мышцы - разгибателя пальцев. Инвалид напрягает и расслабляет мышцу также, как и при естественных движениях схват - раскрытие кисти.
Одновременно регистрируются сигнал электрического импеданса и сигнал ЭМГ с сокращающейся мышцы при пропускании через нее переменного электрического тока частотой 100 кГц, амплитудой 3 мА (показано на графиках фиг. 1.).
Начало работы мышцы-разгибателя характеризуется увеличением амплитуды сигнала ЭМГ (фиг. 1, график электромиограммы, момент времени 5,6 сек) - это момент начала работы алгоритма. В процессе раскрытия кисти уменьшается импеданс мышцы-разгибателя (от 5,6 сек до 6 сек) и кисть остается раскрытой до момента 6,6 сек. Далее при сгибании мышца-разгибатель расслабляется, поэтому амплитуда ее ЭМГ снижается до фонового уровня (фиг. 1, график электромиограммы, момент времени 6,6 сек). Одновременно увеличивается ее импеданс, который достигает максимума в момент окончания процесса схвата кисти (7-я секунда). Процесс периодически повторяется.
В данном примере, блок обработки вычисляет степень сгибания кисти (0% - кисть раскрыта полностью, 100% - кисть выполнила схват полностью) по формуле
где I - текущее значение импеданса
min(I) - минимальное значение импеданса
max(I) - максимальное значение импеданса
В данном примере
min(I)=24,8 (Ом) - достигается в момент времени 6 секунд
max(I)=28,3 (Ом) - достигается в момент времени 7,2 секунд Таким образом, можно вычислить степень схвата кисти в любой момент времени, например, для 6,8 секунды:
Вычисленное значение текущей степени схвата кисти передаются на блок управления, который формирует соответствующие команды на исполнительный механизм, необходимые для достижения соответствующей степени схвата кисти.
Так получают сигнал управления с одной мышцы.
Повысить качество и стабильность сигнала управления техническим устройством можно, используя дополнительно второй канал прибора, который, работая аналогичным образом, регистрирует сигнал электрического импеданса и сигнал ЭМГ со второй мышцы - мышцы-антагониста.
Следующие примеры иллюстрируют изобретение, не ограничивая его по существу.
Пример 1. Управление компьютером (например, громкостью звука)
Электродная система размещается вдоль здоровой левой ноги ниже колена в проекции передней большеберцовой мышцы. Переменный электрический ток (частота 10 кГц, амплитуда 0,01 мА) пропускается через токовые электроды, расположенные на поверхности кожных покровов над мышцей. Оператор совершает подъем стопы. Момент начала подъема стопы фиксируется по увеличению амплитуды сигнала ЭМГ и запоминается текущее значение электрического импеданса. В процессе подъема стопы импеданс уменьшается. Каждое последующее уменьшение импеданса на 1 Ом приводит к уменьшению текущего уровня громкости звука на 10%. Вычисленное значение изменения уровня громкости звука передается на блок управления, который соединяется с компьютером по одному из стандартных интерфейсов (USB, последовательный порт. ИК-порт, Bluetooth, Wi-Fi). Специализированное программное обеспечение компьютера принимает полученную информацию и устанавливает соответствующую громкость звука.
Пример 2. Управление игровой приставкой (виртуальный манипулятор влево-вправо)
Электродная система размещается ниже локтя вдоль правого предплечья в проекции мышцы супинатора на культе инвалида. Переменный электрический ток (частота 100 МГц, амплитуда 10 мА) пропускается через токовые электроды, расположенные на поверхности кожных покровов над мышцей. Инвалид совершает супинацию сохранившейся части предплечья (вращение кнаружи). Момент начала супинации фиксируется по увеличению амплитуды сигнала ЭМГ и запоминается текущее
значение электрического импеданса. В процессе супинации импеданс уменьшается. Каждое последующее уменьшение импеданса на 1 Ом приводит к перемещению виртуального манипулятора вправо на 100 пикселей. Вычисленное значение изменения положения виртуального манипулятора передается на блок управления, который соединяется с приставкой по одному из стандартных интерфейсов (USB, последовательный порт, ИК-порт, Bluetooth, Wi-Fi). Специализированное программное обеспечение приставки принимает полученную информацию и устанавливает соответствующее положение виртуального манипулятора.
Пример 3. Управление робототехническим устройством
Электродная система размещается ниже локтя вдоль левого предплечья инвалида на культе в проекции мышцы - локтевой разгибатель запястья. Переменный электрический ток (частота 100 МГц, амплитуда 0,01 мА) пропускается через токовые электроды, расположенные на поверхности кожных покровов над мышцей. Инвалид совершает разгибание запястья с последующим сгибанием запястья. Момент начала разгибания запястья фиксируется по увеличению амплитуды сигнала ЭМГ и запоминается текущее значение электрического импеданса. В процессе разгибания импеданс уменьшается. Каждое последующее уменьшение импеданса на 1 Ом приводит к опусканию манипулятора робототехнического устройства вниз на 1 см. В процессе сгибания запястья импеданс увеличивается. Каждое последующее увеличение импеданса на 1 Ом приводит к подъему манипулятора вверх на 1 см. Вычисленное значение изменения положения манипулятора передается на блок управления, который соединяется с робототехническим устройством по одному из стандартных интерфейсов (USB. последовательный порт, ИК-порт, Bluetooth, Wi-Fi). Специализированное программное обеспечение робототехнического устройства принимает полученную информацию и устанавливает соответствующее положение манипулятора.
Пример 4. Управление бионическим протезом стопы
Электродная система размещается на культе голени в проекции сохранившейся мышцы, осуществляющей подъем стопы. Переменный электрический ток (частота 10 кГц, амплитуда 10 мА) пропускается через токовые электроды, расположенные на поверхности кожных покровов над мышцей. Оператор совершает напряжение сохранившейся мышцы, осуществляющей подъем стопы. Момент начала процесса подъема стопы фиксируется по увеличению амплитуды сигнала ЭМГ и запоминается текущее значение электрического импеданса. В процессе подъема стопы импеданс уменьшается. Каждое последующее уменьшение импеданса на 1 Ом приводит к увеличению угла подъема стопы на 10 градусов. Вычисленное значение текущего угла подъема стопы передается на блок
управления, который формирует соответствующие команды на исполнительный механизм - протез стопы, необходимые для достижения соответствующего угла подъема стопы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| Комплекс для бионического управления техническими устройствами | 2020 |
|
RU2748428C1 |
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
| Способ снятия тремора | 1988 |
|
SU1671266A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ БИОНИЧЕСКОЙ КОНЕЧНОСТЬЮ | 2016 |
|
RU2635632C1 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| Способ восстановления двигательной активности верхней и нижней конечностей человека | 2017 |
|
RU2644295C1 |
| Способ определения гемодинамических параметров на основе многоканальной электроимпедансной компьютерной кардиографии | 2021 |
|
RU2778992C1 |
| Способ формирования фантомной карты кисти у пациентов с ампутацией верхней конечности на основе активации нейропластичности | 2021 |
|
RU2766044C1 |

Изобретение относится к биофизике и медицинской технике и может быть использовано для управления специальными техническими устройствами. Формируют управляющее воздействие посредством регистрации сигнала электрического импеданса при пропускании через произвольно сокращающуюся мышцу переменного электрического тока и одновременной регистрации сигнала электромиограммы сокращающейся мышцы. Сигналы обрабатываются, подаются в блок управления и затем на исполнительный механизм технического устройства. При этом управляющее воздействие формируют, используя оба сигнала совместно. Способ обеспечивает возможность получения управляющего сигнала, основанного на надежном определении момента начала сокращения мышцы и последующей регистрации сокращения этой мышцы во времени за счёт совместного использования сигналов электромиограммы сокращающейся мышцы и электрического импеданса с сокращающейся мышцы при пропускании через нее переменного электрического тока при формирования управляющего воздействия. 8 з.п. ф-лы, 5 ил., 4 пр.
1. Способ бионического управления техническим устройством, включающий формирование управляющего воздействия посредством регистрации сигнала электрического импеданса при пропускании через произвольно сокращающуюся мышцу переменного электрического тока и одновременной регистрации сигнала электромиограммы сокращающейся мышцы, их обработки, подачи в блок управления и затем на исполнительный механизм технического устройства, при этом управляющее воздействие формируют, используя оба сигнала совместно.
2. Способ по п. 1, отличающийся тем, что пропускают электрический ток с частотой от 10 кГц до 100 МГц и амплитудой от 0,01 до 10 мА.
3. Способ по п. 1, отличающийся тем, что электрический ток пропускают с использованием токовых электродов, расположенных на поверхности кожных покровов или в глубине тканей.
4. Способ по п. 1, отличающийся тем, что диапазон частот сигнала электромиограммы составляет от 50 до 400 Гц.
5. Способ по п. 1, отличающийся тем, что для регистрации сигнала электрического импеданса и одновременно сигнала электромиограммы используют импедансный измерительный преобразователь.
6. Способ по п. 1, отличающийся тем, что в качестве технического устройства используют протез верхней или нижней конечности.
7. Способ по п. 1, отличающийся тем, что в качестве технического устройства используют компьютер.
8. Способ по п. 1, отличающийся тем, что в качестве технического устройства используют игровую приставку.
9. Способ по п. 1, отличающийся тем, что в качестве технического устройства используют робототехническое устройство.
| WO 2012150500 A1, 08.11.2012 | |||
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОРТЕЗОМ ИЛИ ПРОТЕЗОМ КОЛЕННОГО СУСТАВА | 2010 |
|
RU2508078C1 |
| RU 2161307 C1, 27.12.2000 | |||
| WO 2010080683 A1, 15.07.2010 | |||
| US 20130310979 A1, 21.11.2013 | |||
| James A | |||
| Dawley и др | |||
| EMG control of bionic knee prosthesis: exploring muscle co-constraction for improvmed locomotor function | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Материалы конференции IEEE international conference on rehabilitation robotics | |||
| John H | |||
| Bowker и др | |||
| Atlas of limb prosthetics: surgical, prosthetic, and regabilitation principles | |||
| Пуговица для прикрепления ее к материи без пришивки | 1921 |
|
SU1992A1 |
| Раздел: Dadley S | |||
| и др., Upper-limb prosthetics | |||
| Sources of inputs to prosthesis controllers. | |||

