Устройство предназначено для применения в качестве элемента в системах стабилизации, наведения и навигации. Изобретение может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (патент РФ №2098833, МПК6 G01P 15/13, опубл. 10.12.97), содержащее чувствительный элемент, включающий в себя два неподвижных электрода и подвижную пластину, три усилителя, два резистора, источник опорного напряжения, генератор электрического сигнала, две транзисторные пары, три резистора, два конденсатора, позволяющих за счет отрицательной обратной связи осуществить компенсацию электрических помех.
Недостатком данного устройства является низкая точность измерения, так как выбор коэффициента усиления в обратной связи ограничен условием устойчивости.
Наиболее близким по техническому решению является устройство (RU 2231075 C1, G01P 15/13, опубл. 20.06.2004, Бюл. №17), содержащее чувствительный элемент, интегрирующий усилитель, отрицательную обратную связь содержащую датчик момента, ждущие синхронные генераторы, RS-триггер, схемы совпадения. В устройство введены две активные параллельные отрицательные обратные связи: одна - аналоговая, а другая - цифровая. Аналоговая введена с выхода интегрирующего усилителя на вход второго суммирующего элемента через последовательно включенные первый логический элемент, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, первый прецизионный релейный элемент, сглаживающий фильтр, фильтр верхних частот, первый преобразователь напряжение-ток. Цифровая обратная связь введена с выхода интегрирующего усилителя на другой вход второго суммирующего элемента через последовательно включенные первый логический элемент, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, первый прецизионный релейный элемент, сглаживающий фильтр, первый суммирующий элемент, релейный элемент, ждущие синхронные генераторы, RS-триггер, первую пару схем совпадения, другой вход которых соединен с выходом схемы синхронизации, малоразрядный реверсивный двоичный счетчик, малоразрядный итоговый регистр, преобразователь цифровой информации в прямой код, двоичный умножитель, вторую пару схем совпадения, другой вход которых соединен с выходом знакового разряда малоразрядного регистра, реверсивный двоичный счетчик, схему сравнения, другой вход которой соединен со схемой синхронизации через суммирующий счетчик, второй прецизионный релейный элемент, второй преобразователь напряжение-ток, кроме того, дополнительные входы малоразрядного реверсивного двоичного счетчика, малоразрядного итогового регистра, ждущих синхронных генераторов соединены с одним из выходов схемы синхронизации, вход которой соединен с выходом генератора стабильной частоты, другой выход схемы синхронизации соединен с одним из входов первого суммирующего элемента через генератор пилообразного напряжения, а также в устройство введен генератор опорного напряжения, один выход которого соединен с входом датчика угла, другой - со вторым входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ через второй логический элемент, и выход датчика угла соединен с входом интегрирующего усилителя, причем выход реверсивного двоичного счетчика является цифровым выходом устройства.
Недостатком устройства является малая полоса пропускания и низкая точность измерения.
Задачей предложенного технического решения является повышение точности измерения ускорения и расширение полосы пропускания акселерометра.
Это достигается тем, что в акселерометр, содержащий чувствительный элемент, генератор опорного напряжения соединенный с датчиком угла, со схемой ИСКЛЮЧАЮЩЕЕ ИЛИ, через второй логический элемент, интегрирующий усилитель переменного тока со стабильным коэффициентом усиления, соединенный с выходом датчика угла, датчик момента, отрицательную цифровую обратную связь, реализованную с выхода первого прецизионного релейного элемента на вход второго прецизионного релейного элемента, через последовательно соединенные по информационным входам: ждущие синхронные генераторы, RS-триггер, первую пару схем совпадения, другой вход которых соединен с выходом схемы синхронизации, малоразрядный реверсивный двоичный счетчик, малоразрядный итоговый регистр, преобразователь цифровой информации в прямой код, двоичный умножитель, вторую пару схем совпадения, другой вход которых соединен с выходом знакового разряда малоразрядного регистра, реверсивный двоичный счетчик, схему сравнения, другой вход которой соединен со схемой синхронизации через суммирующий счетчик, кроме того, дополнительные входы малоразрядного реверсивного двоичного счетчика, малоразрядного итогового регистра, ждущих синхронных генераторов соединены с одним из выходов схемы синхронизации, вход которой соединен с выходом генератора стабильной частоты, и выход схемы синхронизации соединен с генератором пилообразного напряжения схемы, введена единичная отрицательная обратная связь, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход датчика момента через второй сумматор, причем выход датчика угла, через пропорциональное звено, соединен с одним из входов первого сумматора, второй вход которого соединен с выходом интегрирующего усилителя переменного тока со стабильным коэффициентом усиления, выход которого соединен с входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, через первый логический элемент, кроме того, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход первого прецизионного релейного элемента введены последовательно по информационным входам интегратор и третий сумматор, один вход которого соединен с выходом генератора пилообразного напряжения, а выход соединен с входом первого прецизионного релейного элемента. Выход реверсивного двоичного счетчика является цифровым выходом акселерометра.
Введение интегрирующего усилителя (4) в прямую цепь и пропорционального звена (6) позволило создать изодромное звено (4, 5, 6) с передаточной функцией W(s)=K1(1+T⋅s)/s, которое обеспечит надлежащее качество переходного процесса и астатизм, где  , K2 - коэффициент передачи пропорционального звена, K1 - коэффициент передачи интегрирующего усилителя. Реализация единичной и интегрирующей обратных связей позволило повысить точность измерения ускорения, расширить полосу пропускания и создать акселерометр инвариантным к изменению коэффициента передачи и с астатизмом второго порядка.
, K2 - коэффициент передачи пропорционального звена, K1 - коэффициент передачи интегрирующего усилителя. Реализация единичной и интегрирующей обратных связей позволило повысить точность измерения ускорения, расширить полосу пропускания и создать акселерометр инвариантным к изменению коэффициента передачи и с астатизмом второго порядка.
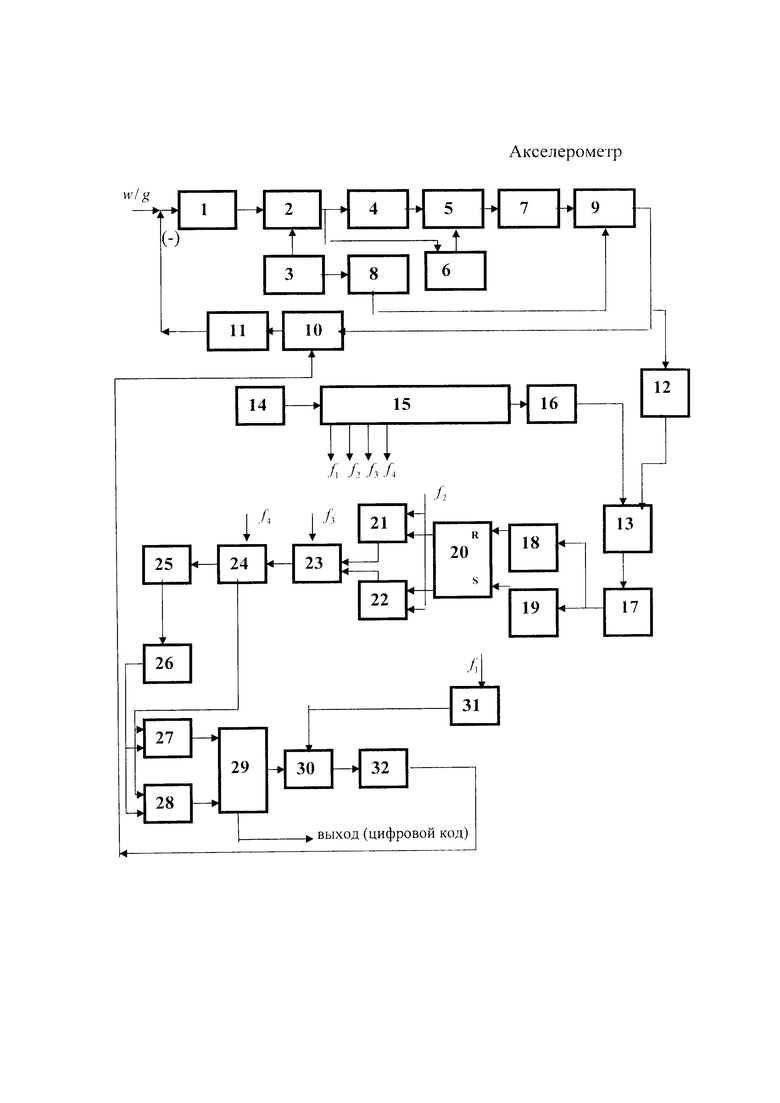
На чертеже изображена функциональная схема акселерометра.
Акселерометр содержит чувствительный элемент 1, угловое положение которого фиксирует датчик угла 2, обмотка возбуждения которого соединена с генератором опорного напряжения 3. Выходная обмотка датчика угла 2 соединена с входом интегрирующего усилителя 4 переменного тока со стабильным коэффициентом усиления, выход которого соединен с входом первого сумматора 5. Второй вход первого сумматора 5 соединен с выходом пропорционального звена 6, вход которого соединен с выходом датчика угла 2. Выход первого сумматора 5 соединен с входом первого логического элемента 7. Вход второго логического элемента 8 соединен с одним из выходов генератора опорного напряжения 3, а выход соединен с одним из входов схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 9, другой вход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 9 соединен с выходом первого логического элемента 7. Один из выходов схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 9 соединен с входом второго сумматора 10, выход которого соединен с одним из входов датчика момента 11. Другой выход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 9 соединен с входом интегратора 12, выход которого соединен с одним из входов третьего сумматора 13, другой вход третьего сумматора 13 соединен с выходом генератора стабильной частоты 14, через схему синхронизации 15 и генератор пилообразного напряжения 16. Выход третьего сумматора 13 соединен с входом первого прецизионного релейного элемента 17, выходы которого соединены с входами ждущих синхронных генераторов 18 и 19. Выход ждущего синхронного генератора 18 соединен с R входом RS-триггера 20. Выход ждущего синхронного 19 соединен с S входом RS-триггера 20. Выходы RS-триггера 20 соединены соответственно с одним из входов первой пары схемы совпадения 21 и 22, другие входы 21 и 22 соединены с выходом схемы синхронизации 15. Выходы первой пары схем совпадения 21 и 22 соединены с входами малоразрядного реверсивного двоичного счетчика 23, другой вход счетчика 23 соединен с выходом схема синхронизации 15. Входами для малоразрядного итогового регистра 24 является выход малоразрядного реверсивного двоичного счетчика 23 и выход схемы синхронизации 15. Выход малоразрядного итогового регистра 24 соединен с входом преобразователя цифровой информации в прямой код 25, выход которого соединен с входом двоичного умножителя 26, выход двоичного умножителя 26 соединен с входами второй пары схем совпадения 27 и 28, другие входы второй пары схем совпадения 27 и 28 соединены с выходами знакового разряда малоразрядного итогового регистра 24. Выходы схем второй пары схем совпадения 27 и 28 соединены соответственно с суммирующим и вычитающим входами реверсивного двоичного счетчика 29. Выход реверсивного двоичного счетчика 29 соединен с одним из входов схемы сравнения 30, другой вход схемы сравнения 30 соединен с выходом схемы синхронизации 15 через суммирующий счетчик 31. Вход второго прецизионного релейного элемента 32 соединен с выходом схемы сравнения 30, а выход второго прецизионного релейного элемента 32 соединен с одним из входов второго сумматора 10. Информация о действующем ускорении, в цифровом коде, выдается с выхода реверсивного двоичного счетчика 29.
Внутреннее содержание блоков, реализующих акселерометр, описано в книгах: Майоров С.А., Новиков Г.И. "Принцип организации цифровых машин ". Л.: Машиностроение, 1974, 432 с.; Хоровиц П., Хилл У. "Искусство схемотехники". М.: Мир, т. 1-3, 1993.
Работа акселерометра осуществляется следующим образом.
Отклонение чувствительного элемента 1, под действием ускорения, фиксируется датчиком угла 2, обмотка возбуждения которого соединена с генератором несущей частоты (ГОН) 3. Выходной сигнал с датчика угла 2 имеет фазу 0° либо 180° относительно несущей частоты ГОН 3. Выходной сигнал с датчика угла 2 усиливается первым интегрирующим усилителем переменного тока 4 со стабильным коэффициентом усиления. Сигнал с первого интегрирующего усилителя 4 поступает на один из входов первого сумматора 5, другой вход которого соединен с выходом датчика угла 2 через пропорциональное звено 6. Сигнал с выхода первого сумматора 5 поступает на вход первого логического элемента 7. С выхода первого логического элемента 7 входной сигнал с первого сумматора 5 представляется в виде сигнала прямоугольной формы с частотой ГОН 3. Для выделения фазы отклонения чувствительного элемента 1 предусмотрен второй логический элемент 8, на вход которого подается сигнал с ГОН 3. На выходе второго логического элемента 8 будет сигнал аналогичный по форме сигналу с первого логического элемента 7. Выходные сигналы с 7 и 8, сдвинутые по фазе, поступают на входы схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 9 (схема сложения по модулю "2"), осуществляющей операцию логического сложения. Если сигналы с 7 и 8 имеют нулевой фазовый сдвиг, то на выходе схемы 9 имеем логический "0", если же сигналы с 7 и 8 имеют фазовый сдвиг, отличный от нуля, то на выходе 9 имеем логическую "1". Форма выходного сигнала с 9 аналогична форме сигналов со схемы 7 и 8. Выходной сигнал с выхода 9 поступает как на вход второго сумматора 10, так и на вход первого прецизионного релейного элемента 17, через интегратор 12, выход которого соединен с одним из входов третьего сумматора 13. Переключение первого прецизионного релейного элемента 17 происходит на несущей частоте генератора 3, и осуществляется фиксация уровня сигнала с выхода 9. Выход второго сумматора 10 соединен с обмоткой датчика моментов 13. На другой вход третьего сумматора 13 поступает сигнал с генератора пилообразного напряжения 16, для которого входным сигналом является сигнал со схемы синхронизации 15. Генератор стабильной частоты 14 подключен к входу схемы синхронизации 15. На выходе третьего сумматора 13 будет сигнал в виде пилы, смещенный по уровню в зависимости от фазы отклонения чувствительного элемента 1. Релейный элемент 17, включенный на выход 13, срабатывает по знаку сигнала с выхода 13, и сигнал в виде ШИМа (широтно-импульсной модуляции) поступает на входы ждущих синхронных генераторов (ЖСГ) 18 и 19, которые взводятся от релейного элемента 17 и вырабатывают короткие (длительностью, определяемой частотой привязки схемы синхронизации 15) импульсы, частота которых определяется частотой переключения 17. В зависимости от фазы отклонения чувствительного элемента 1 на RS-триггер 20 подается импульс с ЖСГ 18, либо с ЖСГ 19. На один из входов первой пары схем совпадения 21 и 22 (схем И) подаются сигналы с выхода RS-триггера 20, на другие - импульсы счета со схемы синхронизации 15. В зависимости от состояния RS-триггера 20 импульсы будут подаваться либо на суммирующий, либо на вычитающий входы малоразрядного реверсионного двоичного счетчика 23. Информация из счетчика 23 (равная разности "положительных" и "отрицательных" импульсов) по сигналу импульса установки со схемы синхронизации 15 переписывается в малоразрядный итоговый регистр 24 по импульсу записи со схемы синхронизации 15. Цифровой код с итогового регистра 24 поступает в преобразователь цифровой информации в прямой код 25. Положительная информация в малоразрядном итоговом регистре 24 представляется в прямом коде, а отрицательная - в дополнительном. Старший знаковый разряд показывает направление отклонения чувствительного элемента 1. Цифровой код с 25 поступает на двоичный умножитель 26, сигнал на выходе которого представляется в виде синхроимпульсов. Синхроимпульсы с двоичного умножителя 26, пропорциональные цифровому коду, поступают на выходы второй пары схем совпадения 27 и 28, на другие входы которых поступает старший знаковый разряд с малоразрядного итогового регистра 24. Если знаковый разряд с 24 совпадает со знаковым разрядом цифрового кода с 26, то цифровой код с 26 поступает на суммирующий вход реверсивного двоичного счетчика 29, в противном случае - на отрицательный вход счетчика 29. Информация со счетчика 29 (равная разности числа "положительных" и "отрицательных" импульсов), по сигналу с устройства распределения синхроимпульсов 15, поступает на один из входов схемы сравнения 30, другой вход 30 соединен с выходом суммирующего счетчика 31, заполнение которого осуществляется с частотой заполнения с устройства 15. Цифровые коды с 29 и 31 сравниваются схемой сравнения 30, если код с 29 больше, чем с 31, на выходе 30 имеем логический "0", в противном случае - "1". Информация со схемы сравнения 30 поступает на вход второго прецизионного релейного элемента 32, переключение которого осуществляется с частотой с устройства распределения синхроимпульсов 15, и выходной сигнал в виде ШИМа поступает на второй вход второго сумматора 10. Под действием сигналов, поступающих на датчик момента 11 с 10, чувствительный элемент 1 возвращается в исходное (нулевое) положение.
Информация об ускорении объекта, в виде цифрового кода, поступает с выхода реверсивного двоичного счетчика 29.
Введение в устройство двух параллельных отрицательных обратных, одна из которых с единичной обратной связью, связей позволяет создать акселерометр повышенной точности, с астатизмом второго порядка и с изодромой по переменному току, обеспечивающей заданное качество переходного процесса и фильтрацию, а также изменение скорости интегрирования в зависимости от состояния малоразрядного реверсивного двоичного счетчика, малоразрядного итогового регистра и двоичного умножителя. Введение в устройство единичной обратной связи позволяет создать акселерометр, инвариантный к изменению коэффициента передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2004 |
|
RU2276372C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2231075C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2004 |
|
RU2255341C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279093C1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2481588C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478212C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2447451C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2226695C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2189046C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190226C1 |
Акселерометр предназначен для применения в системах стабилизации и навигации. Сущность заявленного технического решения заключается в том, что в акселерометр, содержащий чувствительный элемент, генератор опорного напряжения, датчик угла, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, пару логических элементов, датчик момента, отрицательную цифровую обратную связь, ждущие синхронные генераторы, RS-триггер, две пары схем совпадения, схему синхронизации, малоразрядный реверсивный двоичный счетчик, малоразрядный итоговый регистр, преобразователь цифровой информации в прямой код, двоичный умножитель, генератор пилообразного напряжения, введена единичная отрицательная обратная связь, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход датчика момента через второй сумматор, причем выход датчика угла через пропорциональное звено соединен с одним из входов первого сумматора, второй вход которого соединен с выходом интегрирующего усилителя переменного тока со стабильным коэффициентом усиления, выход которого соединен с входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, через первый логический элемент, кроме того, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход первого прецизионного релейного элемента введены последовательно по информационным входам интегратор и третий сумматор, один вход которого соединен с выходом генератора пилообразного напряжения, а выход соединен с входом первого прецизионного релейного элемента. Выход реверсивного двоичного счетчика является цифровым выходом акселерометра. Технический результат, наблюдаемый при реализации заявленного технического решения, заключается в расширении полосы пропускания и увеличении точности измерения ускорений. 1 ил.
Акселерометр, содержащий чувствительный элемент, генератор опорного напряжения, соединенный с датчиком угла, со схемой ИСКЛЮЧАЮЩЕЕ ИЛИ, через второй логический элемент, интегрирующий усилитель переменного тока со стабильным коэффициентом усиления, соединенный с выходом датчика угла, датчик момента, отрицательную цифровую обратную связь, реализованную с выхода первого прецизионного релейного элемента на вход второго прецизионного релейного элемента через последовательно соединенные по информационным входам: ждущие синхронные генераторы, RS-триггер, первую пару схем совпадения, другой вход которых соединен с выходом схемы синхронизации, малоразрядный реверсивный двоичный счетчик, малоразрядный итоговый регистр, преобразователь цифровой информации в прямой код, двоичный умножитель, вторую пару схем совпадения, другой вход которых соединен с выходом знакового разряда малоразрядного регистра, реверсивный двоичный счетчик, схему сравнения, другой вход которой соединен со схемой синхронизации через суммирующий счетчик, кроме того, дополнительные входы малоразрядного реверсивного двоичного счетчика, малоразрядного итогового регистра, ждущих синхронных генераторов соединены с одним из выходов схемы синхронизации, вход которой соединен с выходом генератора стабильной частоты, и выход схемы синхронизации соединен с генератором пилообразного напряжения схемы, отличающийся тем, что в него введена единичная отрицательная обратная связь, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход датчика момента через второй сумматор, причем выход датчика угла, через пропорциональное звено, соединен с одним из входов первого сумматора, второй вход которого соединен с выходом интегрирующего усилителя переменного тока со стабильным коэффициентом усиления, выход которого соединен с входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, через первый логический элемент, кроме того, с выхода схемы ИСКЛЮЧАЮЩЕЕ ИЛИ на вход первого прецизионного релейного элемента введены последовательно по информационным входам интегратор и третий сумматор, один вход которого соединен с выходом генератора пилообразного напряжения, а выход соединен с входом первого прецизионного релейного элемента, и выход реверсивного двоичного счетчика является цифровым выходом акселерометра.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2004 |
|
RU2276372C1 |
| Цифровой акселерометр | 1980 |
|
SU920529A1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| US 0005396439 A, 07.03.1995 | |||
| US 0007406868 B2, 05.08.2008. | |||

