Компенсационный акселерометр предназначен для применения в качестве чувствительного элемента в системах стабилизации и навигации. Изобретение может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (А.С. №742801, опубл. в БИ №23, 1980), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент. Причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент и дополнительный интегрирующий усилитель подключен к управляющему входу электронного ключа.
Недостатком данного устройства является низкая точность измерения, так как выбор коэффициента усиления в жесткой отрицательной обратной связи ограничен условием устойчивости системы.
Наиболее близким по техническому решению является устройство для измерения ускорений (пат. RU №2171995, МПК7 G01P 15/13, 2002), содержащее чувствительный элемент, датчик угла, усилитель и датчик момента, включенного в обратную связь, в который введены последовательно соединенные по информационным входам к выходу усилителя первый эммитерный повторитель, синхронный JK-триггер, два ждущих синхронных генератора, асинхронный RS-триггер, прецизионный релейный элемент, выход которого соединен с входом датчика момента, причем выход усилителя соединен со вторым входом синхронного JK-триггера через инвертор и второй эммитерный повторитель. Второй вход датчика момента соединен с выходом прецизионного релейного элемента через сглаживающий фильтр. Ко второму выходу асинхронного RS-триггера последовательно подключены по информационным входам две схемы совпадения, первый реверсивный двоичный счетчик, итоговый регистр первого двоичного счетчика, преобразователь цифровой информации в прямой код, первый двоичный умножитель, преобразователь цифровой информации в прямой код, второй реверсивный двоичный счетчик, выход которого соединен с первым входом третьего двоичного умножителя. Первый вход третьего двоичного умножителя соединен с выходами схемы совпадения через последовательно соединенные схемы «ИЛИ», суммирующий двоичный счетчик, итоговый регистр суммирующего двоичного счетчика, второй двоичный умножитель. Выход третьего двоичного умножителя соединен со вторым входом второго реверсивного двоичного счетчика. Кроме того, устройство содержит кварцевый генератор, соединенный с устройством распределения синхроимпульсов, выход которого соединен со вторыми входами двух ждущих синхронных генераторов, схем совпадения, первого реверсивного двоичного счетчика, итогового регистра первого реверсивного двоичного счетчика, второго реверсивного двоичного счетчика, первого и второго двоичного умножителя. В устройство введены генератор несущей частоты и последовательно подключенные к его выходу фазосдвигающая цепь, устройство сравнения (компаратор), формирователь длительности импульса, выход которого соединен с третьим входом синхронного JK-триггера. Выход генератора несущей частоты соединен со вторым входом датчика угла, выход которого соединен с входом усилителя через полосовой фильтр. Выход второго двоичного умножителя является выходом относительного цифрового кода устройства.
Недостатком устройства является малая полоса пропускания, невысокое быстродействие и малый коэффициент усиления по разомкнутому контуру. Перечисленные факторы определяют точность в установившемся режиме.
Технической задачей настоящего изобретения является расширение полосы пропускания и повышение точности компенсационного акселерометра.
Поставленная цель достигается тем, что в компенсационный акселерометр, содержащий чувствительный элемент, датчик угла, выход которого соединен с входом полосового фильтра, отрицательную обратную связь, реализованную с выхода синхронного JK-триггера на вход датчика момента через последовательно соединенные по информационным входам пары ждущих синхронных генератора, асинхронный RS-триггер, прецизионный релейный элемент, выход которого соединен с входом датчика момента, и второй вход датчика момента соединен с выходом прецизионного релейного элемента через сглаживающий фильтр, а также первый и второй эммиторные повторители, соединенные с входом синхронного JK-триггера причем вход второго эммиторного повторителя соединен с выходом инвертора, один из входов датчика угла соединен с одним из выходов генератора несущей частоты, кроме того, второй выход асинхронного RS-триггера соединен с входом второго двоичного реверсивного двоичного счетчика последовательно по информационным входам через две схемы совпадения, первый реверсивный двоичный счетчик, итоговый регистр первого двоичного счетчика, преобразователь цифровой информации в прямой код, первый двоичный умножитель, и первый вход третьего двоичного умножителя соединен с выходами схем совпадения через последовательно соединенные схему «ИЛИ», суммирующий двоичный счетчик, итоговый регистр суммирующего двоичного счетчика, второй двоичный умножитель, и выход третьего двоичного умножителя соединен со вторым входом второго реверсивного двоичного счетчика, один из выходов второго реверсивного двоичного счетчика соединен с одним из входов третьего двоичного умножителя, кроме того, кварцевый генератор соединен с устройством распределения синхроимпульсов, выходы которого соединены со вторыми входами пары ждущих синхронных генераторов, пары схем совпадения, первого и второго реверсивного двоичного счетчиков, суммирующего двоичного счетчика, итогового регистра первого реверсивного двоичного счетчика, первого, второго и третьего двоичного умножителя, генератор несущей частоты соединен последовательно с третьим входом синхронного JK-триггера через фазосдвигающую цепь, компаратор, формирователь длительности импульса, введена корректирующая отрицательная обратная связь с выхода полосового фильтра на его вход через нелинейный элемент (усилитель с насыщением) и фильтр с передаточной функцией  (где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа), выходы нелинейного элемента соединены с входами первого эммиторного повторителя и инвертора, и выход второго реверсивного двоичного счетчика является выходом относительного цифрового кода устройства.
(где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа), выходы нелинейного элемента соединены с входами первого эммиторного повторителя и инвертора, и выход второго реверсивного двоичного счетчика является выходом относительного цифрового кода устройства.
За счет введения в компенсационный акселерометр нелинейного элемента с насыщением и корректирующей отрицательной обратной связи с фильтром с передаточной функцией улучшается синхронизация системы при больших изменениях входной величины. Кроме того, происходит увеличение избытка фазы в области низких частот и увеличение наклона амплитуды (увеличение усиления, коэффициента передачи по разомкнутому контуру и расширение полосы пропускания). Включение в компенсационный акселерометр: прецизионного релейного элемента, асинхронного RS-триггера, реверсивных двоичных счетчиков, итоговых регистров, преобразователя цифровой информации в цифровой код, двоичных умножителей позволяет реализовать автоколебательный режим. Измеряемое компенсационным акселерометром ускорение будет пропорционально относительному цифровому коду, который не зависит от динамических свойств устройства, что позволяет также повысить точность (пат. №2171995, G01Р 15/13, 2002).
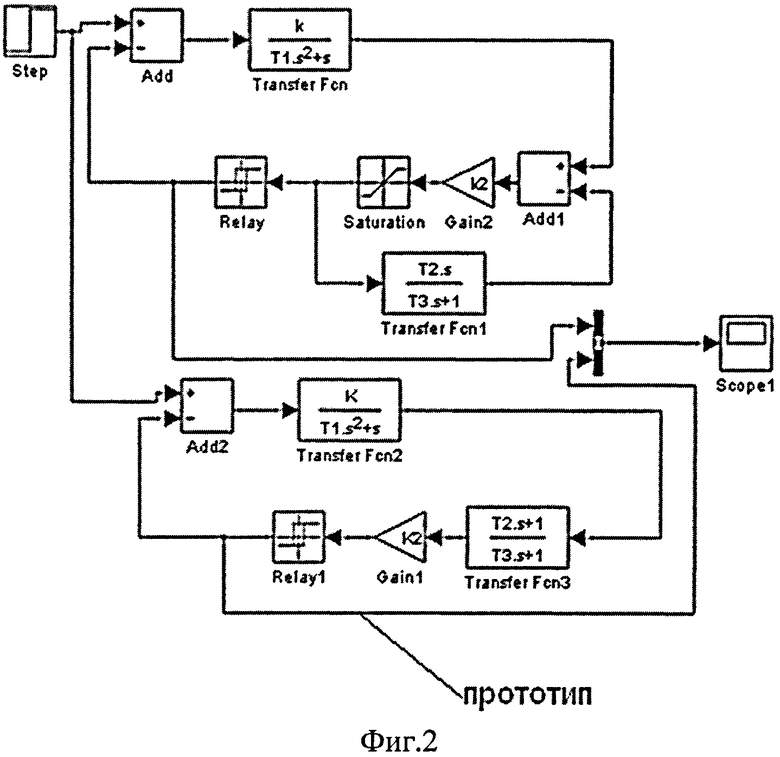
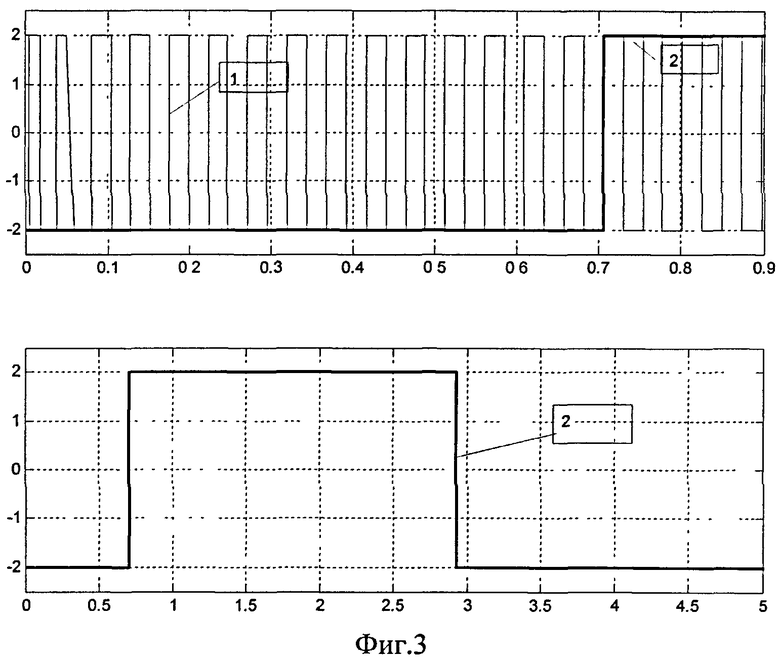
На фиг.1 изображена функциональная схема предлагаемого компенсационного акселерометра; на фиг.2 - структурная схема; на фиг.3 - результаты моделирования компенсационного акселерометра и прототипа.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое положение которого определяется датчиком угла 2. Обмотка возбуждения датчика угла 2 соединена с выходом генератора несущей частоты 3. Выход датчика угла 2 соединен с входом полосового фильтра 4, выход которого соединен с входом нелинейного элемента 5 (в качестве нелинейного элемента используется усилитель с насыщением). В корректирующий контур отрицательной обратной связи, реализованной с выхода нелинейного элемента 5 на один из входов 5, введен фильтр 6 с передаточной функцией  (где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа). Выход нелинейного элемента 5 соединен с входом первого эммитерного повторителя 7 и с входом инвертора 8. Выход инвертора 8 соединен с входом второго эммитерного повторителя 9. Один из выходов генератора несущей частоты 3 соединен с входом фазосдвигающей цепи 10, выход которой соединен с входом компаратора 11. Выход компаратора 11 соединен с входом формирователя длительности импульсов несущей частоты 12. Первые и вторые входы универсального синхронного JK-триггера 13 соединены с выходами первого и второго эммитерных повторителей 7 и 9. Третий вход синхронного JK-триггера 13 соединен с выходом формирователя длительности импульса несущей частоты 12. Первый и второй выходы JK-триггера 13 соединены с входами ждущих синхронных генераторов 14 и 15, другие входы 14 и 15 соединены с выходом устройства распределения синхроимпульсов 16, вход которого соединен с выходом кварцевого генератора 17. Выходы ждущих синхронных генераторов 14 и 15 соединены с входами асинхронного RS-триггера 18. Первый выход асинхронного RS-триггера 18 соединен с входом прецизионного релейного элемента 19, выход которого соединен с входом датчика моментов 20, второй вход 20 соединен с выходом сглаживающего фильтра 21, соединенного с входом прецизионного релейного элемента 19. Второй выход асинхронного RS-триггера 18 соединен с первыми входами схем совпадения (схемы «И») 22 и 23. Вторые входы схем совпадения 22 и 23 соединены с выходами устройства распределения синхроимпульсов 16. Выходы схем совпадения 22 и 23 соединены с первым и вторым входами первого реверсивного двоичного счетчика 24, третий вход первого реверсивного двоичного счетчика 24 соединен с выходом устройства распределения синхроимпульсов 16. Первый вход итогового регистра первого реверсивного двоичного счетчика 25 соединен с выходом первого реверсивного двоичного счетчика 24, а его второй вход соединен с выходом устройства распределения синхроимпульсов 16. Выход итогового регистра первого реверсивного двоичного счетчика 25 соединен с входом преобразователя цифровой информации в прямой код 26, а его выход - с первым входом первого двоичного умножителя 27. Второй вход первого двоичного умножителя 27 соединен с выходом устройства распределения синхроимпульсов 16. Выход первого двоичного умножителя 27 соединен с первым входом второго реверсивного двоичного счетчика 28. Первые и вторые выходы схем совпадения 22 и 23, помимо соединения с соответствующими входами первого реверсивного двоичного счетчика 24, соединены по информационным входам со схемой сложения (схема «ИЛИ») 29. Выход схемы сложения 29 соединен с входом суммирующего двоичного счетчика 30. Выход суммирующего двоичного счетчика 30 соединен с входом итогового регистра суммирующего двоичного счетчика 31. Выход итогового регистра суммирующего двоичного счетчика 31 соединен с первым входом второго двоичного умножителя 32, выход которого соединен с первым входом третьего двоичного умножителя 33. Вторые входы суммирующего двоичного счетчика 30, итогового регистра суммирующего двоичного счетчика 31, второго двоичного умножителя 32, третьего двоичного умножителя 33 соединены с выходом устройства распределения синхроимпульсов 16. Выход второго реверсивного двоичного счетчика 28 соединен со вторым входом третьего двоичного умножителя 33, и выход третьего двоичного умножителя 33 соединен со вторым входом второго реверсивного двоичного счетчика 28.
(где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа). Выход нелинейного элемента 5 соединен с входом первого эммитерного повторителя 7 и с входом инвертора 8. Выход инвертора 8 соединен с входом второго эммитерного повторителя 9. Один из выходов генератора несущей частоты 3 соединен с входом фазосдвигающей цепи 10, выход которой соединен с входом компаратора 11. Выход компаратора 11 соединен с входом формирователя длительности импульсов несущей частоты 12. Первые и вторые входы универсального синхронного JK-триггера 13 соединены с выходами первого и второго эммитерных повторителей 7 и 9. Третий вход синхронного JK-триггера 13 соединен с выходом формирователя длительности импульса несущей частоты 12. Первый и второй выходы JK-триггера 13 соединены с входами ждущих синхронных генераторов 14 и 15, другие входы 14 и 15 соединены с выходом устройства распределения синхроимпульсов 16, вход которого соединен с выходом кварцевого генератора 17. Выходы ждущих синхронных генераторов 14 и 15 соединены с входами асинхронного RS-триггера 18. Первый выход асинхронного RS-триггера 18 соединен с входом прецизионного релейного элемента 19, выход которого соединен с входом датчика моментов 20, второй вход 20 соединен с выходом сглаживающего фильтра 21, соединенного с входом прецизионного релейного элемента 19. Второй выход асинхронного RS-триггера 18 соединен с первыми входами схем совпадения (схемы «И») 22 и 23. Вторые входы схем совпадения 22 и 23 соединены с выходами устройства распределения синхроимпульсов 16. Выходы схем совпадения 22 и 23 соединены с первым и вторым входами первого реверсивного двоичного счетчика 24, третий вход первого реверсивного двоичного счетчика 24 соединен с выходом устройства распределения синхроимпульсов 16. Первый вход итогового регистра первого реверсивного двоичного счетчика 25 соединен с выходом первого реверсивного двоичного счетчика 24, а его второй вход соединен с выходом устройства распределения синхроимпульсов 16. Выход итогового регистра первого реверсивного двоичного счетчика 25 соединен с входом преобразователя цифровой информации в прямой код 26, а его выход - с первым входом первого двоичного умножителя 27. Второй вход первого двоичного умножителя 27 соединен с выходом устройства распределения синхроимпульсов 16. Выход первого двоичного умножителя 27 соединен с первым входом второго реверсивного двоичного счетчика 28. Первые и вторые выходы схем совпадения 22 и 23, помимо соединения с соответствующими входами первого реверсивного двоичного счетчика 24, соединены по информационным входам со схемой сложения (схема «ИЛИ») 29. Выход схемы сложения 29 соединен с входом суммирующего двоичного счетчика 30. Выход суммирующего двоичного счетчика 30 соединен с входом итогового регистра суммирующего двоичного счетчика 31. Выход итогового регистра суммирующего двоичного счетчика 31 соединен с первым входом второго двоичного умножителя 32, выход которого соединен с первым входом третьего двоичного умножителя 33. Вторые входы суммирующего двоичного счетчика 30, итогового регистра суммирующего двоичного счетчика 31, второго двоичного умножителя 32, третьего двоичного умножителя 33 соединены с выходом устройства распределения синхроимпульсов 16. Выход второго реверсивного двоичного счетчика 28 соединен со вторым входом третьего двоичного умножителя 33, и выход третьего двоичного умножителя 33 соединен со вторым входом второго реверсивного двоичного счетчика 28.
Внутреннее содержание блоков, реализующих компенсационный акселерометр, приведены в книгах: Майоров С.А., Новиков Г.И. «Принцип организации цифровых машин». Л.: Машиностроение. 1974, 432 с., Хоровиц П., Хилл У. «Искусство схемотехники», М.: Мир, т.1-3, 1993.
Работа компенсационного акселерометра осуществляется следующим образом. Отклонение чувствительного элемента 1, вызванное действием ускорения, фиксируется датчиком угла 2 индукционного типа, обмотка возбуждения которого соединена с выходом генератора несущей частоты 3. Выходной сигнал с датчика угла 2 имеет фазу 0° или 180° относительно несущей частоты. Полосовой фильтр 4 пропускает сигнал только несущей частоты с датчика угла 2 на нелинейный элемент 5. На информационные JK входы универсального JK-триггера 13 сигнал должен подаваться в противофазе. Для этого усиленный сигнал по напряжению с нелинейного элемента 5, для одного из входов инвертируется на инверторе 8. Первые и вторые эммитерные повторители 7 и 9 обеспечивают согласование высокого выходного сопротивления усилителя с насыщением 5 и инвертора 8 с низкоомным входным сопротивлением информационных входов JK-триггера 13. В корректирующую отрицательную обратную связь включен фильтр 6 с передаточной функцией  (где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа). Применение нелинейного элемента 5 и корректирующей отрицательной обратной связи с фильтром 6 улучшает синхронизацию и стабилизацию параметров компенсационного акселерометра. Для определения фазы ускорения, фазы сигналов с датчика 2 и генератора 3 сравниваются на JK-триггере 13, для работы которого необходимо подать на синхронный С-вход (третий вход) импульс определенной длительности. Формируют этот импульс фазосдвигающая цепь 10, компаратор 11 и формирователь длительности импульса несущей частоты 12. Фазосдвигающая цепь 10 обеспечивает сдвиг фазы гармонического сигнала несущей частоты на время задержки информационного сигнала при его прохождении через полосовой фильтр 4 и нелинейный элемент 5. Компаратор 11 выдает прямоугольные импульсы при превышении гармоническим сигналом заданного уровня. Требуемая длительность вырабатывается формирователем длительности импульса несущей частоты 12. Если фаза отклонения чувствительного элемента 1 совпадает с фазой генератора несущей частоты 3, то в момент подачи импульса несущей частоты JK-триггер 13 переходит в устойчивое состояние «1», в противном случае «0». Кварцевый генератор 17 вырабатывает прямоугольные, стабилизированные по частоте импульсы (f≥1 МГц), обеспечивающие требуемый фронт нарастания и спада сигнала. Устройство распределения синхроимпульсов 16 вырабатывает синхронизированные по времени управляющие синхроимпульсы, необходимые для работы компенсационного акселерометра. Ждущие синхронные генераторы 14 и 15, взводимые от JK-триггера 13, вырабатывают короткие (длительностью, определяемой частотой устройства распределения синхроимпульсов 16) импульсы, частота которых определяется частотой переключения JK-триггера 13. В зависимости от фазы отклонения чувствительного элемента 1 на асинхронный RS-триггер 18 подается импульс либо со ждущего синхронного генератора 14 либо 15, т.е. асинхронный RS-триггер 18 переключается с частотой JK-триггера 13. Входной сигнал с асинхронного RS-триггера 18 не может быть непосредственно подан на вход датчика момента 20 ввиду своей нестабильности по амплитуде. Для повышения стабильности импульс с асинхронного RS-триггера 18 подается на прецизионный элемент 19, осуществляющий стабилизацию сигнала по уровню. Выходной сигнал с прецизионного элемента 19 подается на один из входов датчика моментов 20, который возвращает чувствительный элемент 1 в исходное положение. В положительную обратную связь датчика моментов 20 включен сглаживающий фильтр 21, выделяющий постоянную составляющую входного сигнала с прецизионного элемента 19. На первые входы схем совпадения (схем «И») 22 и 23 подаются сигналы со второго выхода асинхронного RS-триггера 18, на другие - импульсы счета с устройства распределения синхроимпульсов 16. В зависимости от состояния асинхронного RS триггера 18 эти импульсы будут проходить либо на суммирующий (первый), либо на вычитающий (второй) вход реверсивного двоичного счетчика 24. По окончании периода колебания, информация из счетчика (равная разности числа «положительных» и «отрицательных» импульсов) по сигналу с устройства распределения синхроимпульсов 16 (импульс на С-вход регистра) переписывается в итоговый регистр реверсивного двоичного счетчика 25. Следующим синхроимпульсом, с устройства распределения синхроимпульсов 16, на вход сброса R0 первый реверсивный двоичный счетчик 24 обнуляется. При этом положительная информация представляется в прямом коде, а отрицательная - в дополнительном. На выходе итогового регистра реверсивного двоичного счетчика 25 будет информация, равная разности временных интервалов. Информация с итогового регистра реверсивного двоичного счетчика 25 поступает на вход преобразователя цифровой информации в прямой код 26. С выхода 26 информация поступает на первый вход первого двоичного умножителя 27, на выходе которого число синхроимпульсов с устройство распределения синхроимпульсов 16 будет пропорционально цифровому коду. Синхроимпульсы с первого двоичного умножителя 27 поступают на суммирующий вход второго реверсивного двоичного счетчика 28. Информация с выхода второго реверсивного двоичного счетчика 28 является относительным цифровым кодом, и эта информация подается на второй вход третьего двоичного умножителя 33. Число импульсов с выхода третьего двоичного умножителя 33, пропорциональных цифровому коду, подается на вычитающий (второй) вход второго реверсивного счетчика 28. Выход второго реверсивного двоичного счетчика 28 является цифровым выходом компенсационного акселерометра. Для получения суммарного временного интервала, с выходов схем совпадения 22 и 23, на вход двоичного умножителя 33 последовательно введены: схема сложения 29, суммирующий двоичный счетчик 30, итоговый регистр суммирующего двоичного счетчика 31 и второй двоичный умножитель 32. Соответствующие входы 30, 31, 32, 33 соединены с выходом устройства распределения синхроимпульсов 16. Относительный цифровой код, с выхода второго реверсивного двоичного счетчика 28 равен (пат. №2171995, G01Р 15/13, 2002)
(где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа). Применение нелинейного элемента 5 и корректирующей отрицательной обратной связи с фильтром 6 улучшает синхронизацию и стабилизацию параметров компенсационного акселерометра. Для определения фазы ускорения, фазы сигналов с датчика 2 и генератора 3 сравниваются на JK-триггере 13, для работы которого необходимо подать на синхронный С-вход (третий вход) импульс определенной длительности. Формируют этот импульс фазосдвигающая цепь 10, компаратор 11 и формирователь длительности импульса несущей частоты 12. Фазосдвигающая цепь 10 обеспечивает сдвиг фазы гармонического сигнала несущей частоты на время задержки информационного сигнала при его прохождении через полосовой фильтр 4 и нелинейный элемент 5. Компаратор 11 выдает прямоугольные импульсы при превышении гармоническим сигналом заданного уровня. Требуемая длительность вырабатывается формирователем длительности импульса несущей частоты 12. Если фаза отклонения чувствительного элемента 1 совпадает с фазой генератора несущей частоты 3, то в момент подачи импульса несущей частоты JK-триггер 13 переходит в устойчивое состояние «1», в противном случае «0». Кварцевый генератор 17 вырабатывает прямоугольные, стабилизированные по частоте импульсы (f≥1 МГц), обеспечивающие требуемый фронт нарастания и спада сигнала. Устройство распределения синхроимпульсов 16 вырабатывает синхронизированные по времени управляющие синхроимпульсы, необходимые для работы компенсационного акселерометра. Ждущие синхронные генераторы 14 и 15, взводимые от JK-триггера 13, вырабатывают короткие (длительностью, определяемой частотой устройства распределения синхроимпульсов 16) импульсы, частота которых определяется частотой переключения JK-триггера 13. В зависимости от фазы отклонения чувствительного элемента 1 на асинхронный RS-триггер 18 подается импульс либо со ждущего синхронного генератора 14 либо 15, т.е. асинхронный RS-триггер 18 переключается с частотой JK-триггера 13. Входной сигнал с асинхронного RS-триггера 18 не может быть непосредственно подан на вход датчика момента 20 ввиду своей нестабильности по амплитуде. Для повышения стабильности импульс с асинхронного RS-триггера 18 подается на прецизионный элемент 19, осуществляющий стабилизацию сигнала по уровню. Выходной сигнал с прецизионного элемента 19 подается на один из входов датчика моментов 20, который возвращает чувствительный элемент 1 в исходное положение. В положительную обратную связь датчика моментов 20 включен сглаживающий фильтр 21, выделяющий постоянную составляющую входного сигнала с прецизионного элемента 19. На первые входы схем совпадения (схем «И») 22 и 23 подаются сигналы со второго выхода асинхронного RS-триггера 18, на другие - импульсы счета с устройства распределения синхроимпульсов 16. В зависимости от состояния асинхронного RS триггера 18 эти импульсы будут проходить либо на суммирующий (первый), либо на вычитающий (второй) вход реверсивного двоичного счетчика 24. По окончании периода колебания, информация из счетчика (равная разности числа «положительных» и «отрицательных» импульсов) по сигналу с устройства распределения синхроимпульсов 16 (импульс на С-вход регистра) переписывается в итоговый регистр реверсивного двоичного счетчика 25. Следующим синхроимпульсом, с устройства распределения синхроимпульсов 16, на вход сброса R0 первый реверсивный двоичный счетчик 24 обнуляется. При этом положительная информация представляется в прямом коде, а отрицательная - в дополнительном. На выходе итогового регистра реверсивного двоичного счетчика 25 будет информация, равная разности временных интервалов. Информация с итогового регистра реверсивного двоичного счетчика 25 поступает на вход преобразователя цифровой информации в прямой код 26. С выхода 26 информация поступает на первый вход первого двоичного умножителя 27, на выходе которого число синхроимпульсов с устройство распределения синхроимпульсов 16 будет пропорционально цифровому коду. Синхроимпульсы с первого двоичного умножителя 27 поступают на суммирующий вход второго реверсивного двоичного счетчика 28. Информация с выхода второго реверсивного двоичного счетчика 28 является относительным цифровым кодом, и эта информация подается на второй вход третьего двоичного умножителя 33. Число импульсов с выхода третьего двоичного умножителя 33, пропорциональных цифровому коду, подается на вычитающий (второй) вход второго реверсивного счетчика 28. Выход второго реверсивного двоичного счетчика 28 является цифровым выходом компенсационного акселерометра. Для получения суммарного временного интервала, с выходов схем совпадения 22 и 23, на вход двоичного умножителя 33 последовательно введены: схема сложения 29, суммирующий двоичный счетчик 30, итоговый регистр суммирующего двоичного счетчика 31 и второй двоичный умножитель 32. Соответствующие входы 30, 31, 32, 33 соединены с выходом устройства распределения синхроимпульсов 16. Относительный цифровой код, с выхода второго реверсивного двоичного счетчика 28 равен (пат. №2171995, G01Р 15/13, 2002)
 , где x - входное воздействие, t1, t2, t - временные интервалы.
, где x - входное воздействие, t1, t2, t - временные интервалы.
В предлагаемом компенсационном акселерометре за счет включения в структуру: схем совпадения 22 и 23, двоичного умножителя 33, схемы сложения «ИЛИ» 29, суммирующего двоичного счетчика 30, второго итогового регистра суммирующего двоичного счетчика 31, второго двоичного умножителя 32, реверсивного двоичного счетчика 24, итогового регистра 25, преобразователя кода 26, двоичного умножителя 27 и реверсивного двоичного счетчика 28 осуществляется преобразование временных интервалов t1, t2, t в относительный цифровой код, пропорциональный входному воздействию. Введение нелинейного элемента 5, охваченного корректирующей отрицательной обратной связью с фильтром, позволяет осуществить синхронизацию параметров, увеличить коэффициент передачи, быстродействие, расширить полосу пропускания и повысить точность измерения компенсационного акселерометра.
Технический результат был проверен путем моделирования компенсационного акселерометра, которое осуществлено в соответствии со структурной схемой, представленной на фиг.2, и результаты моделирования приведены на фиг.3. Из анализа моделирования следует, что компенсационный акселерометр (1) по сравнению с прототипом (2) имеет значительную полосу пропускания, значительное быстродействие и реализуемый относительный цифровой код, пропорциональный входному воздействию. Работа компенсационного акселерометра устойчива при значительном коэффициенте по разомкнутому контуру.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2481588C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171995C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279093C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2226695C1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2244311C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2003 |
|
RU2231075C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171994C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2227920C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2004 |
|
RU2255341C1 |
Изобретение предназначено для использования в качестве чувствительного элемента в системах стабилизации и навигации. Компенсационный акселерометр содержит чувствительный элемент, датчик угла, выход которого соединен с входом полосового фильтра, отрицательную обратную связь, реализованную с выхода синхронного JK-триггера на вход датчика момента через последовательно соединенные по информационным входам пары ждущих синхронных генераторов, асинхронный RS-триггер, прецизионный релейный элемент, выход которого соединен с входом датчика момента, корректирующую отрицательную обратную связь с выхода полосового фильтра на его вход через нелинейный элемент (усилитель с насыщением) и фильтр с передаточной функцией
(где Т1 - постоянная времени фильтра, s - оператор преобразования Лапласа). Отличительной особенностью изобретения является то, что устройство работает в автоколебательном режиме и измеряемое ускорение пропорционально цифровому коду, которое не зависит от динамических свойств устройства, что позволяет повысить точность и расширить полосу пропускания. 3 ил.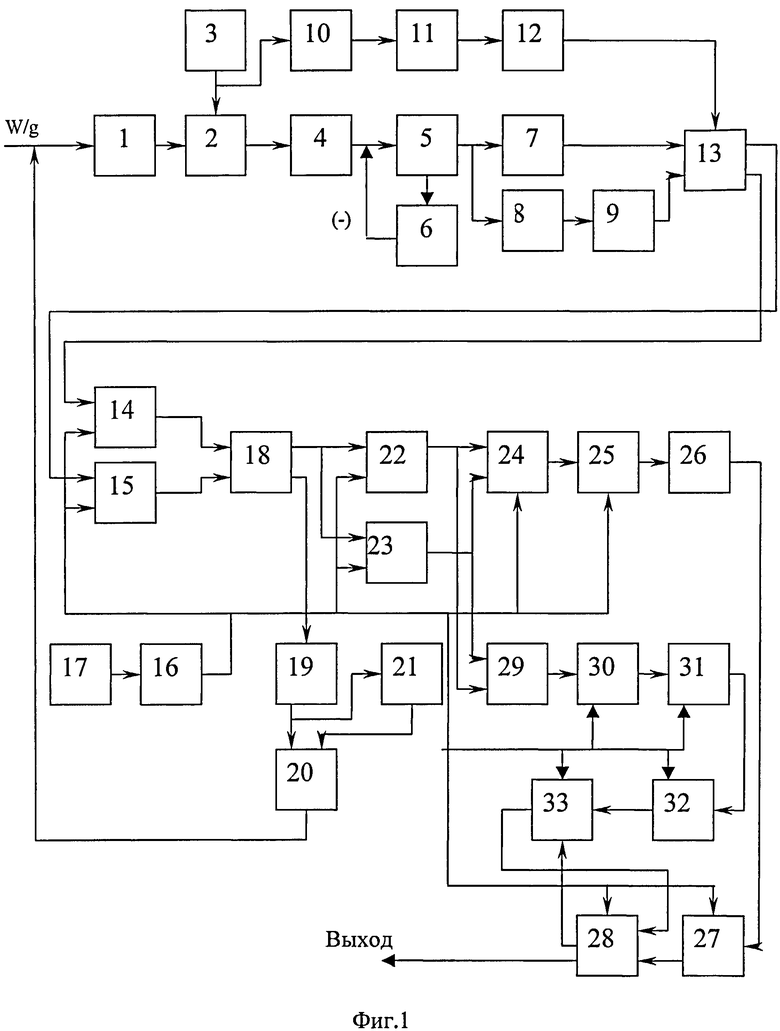
Компенсационный акселерометр, содержащий чувствительный элемент, датчик угла, выход которого соединен с входом полосового фильтра, отрицательную обратную связь, реализованную с выхода синхронного JK-триггера на вход датчика момента через последовательно соединенные по информационным входам пары ждущих синхронных генераторов, асинхронный RS-триггер, прецизионный релейный элемент, выход которого соединен с входом датчика момента, и второй вход датчика момента соединен с выходом прецизионного релейного элемента через сглаживающий фильтр, а также первый и второй эммитерные повторители, соединенные с входом синхронного JK-триггера причем вход второго эммитерного повторителя соединен с выходом инвертора, один из входов датчика угла соединен с одним из выходов генератора несущей частоты, кроме того, второй выход асинхронного RS-триггера соединен с входом второго двоичного реверсивного двоичного счетчика последовательно по информационным входам через две схемы совпадения, первый реверсивный двоичный счетчик, итоговый регистр первого двоичного счетчика, преобразователь цифровой информации в прямой код, первый двоичный умножитель, и первый вход третьего двоичного умножителя соединен с выходами схем совпадения через последовательно соединенные схему ИЛИ, суммирующий двоичный счетчик, итоговый регистр суммирующего двоичного счетчика, второй двоичный умножитель, и выход третьего двоичного умножителя соединен со вторым входом второго реверсивного двоичного счетчика, один из выходов второго реверсивного двоичного счетчика соединен с одним из входов третьего двоичного умножителя, кроме того, кварцевый генератор соединен с устройством распределения синхроимпульсов, выходы которого соединены со вторыми входами пары ждущих синхронных генераторов, пары схем совпадения, первого и второго реверсивного двоичного счетчиков, суммирующего двоичного счетчика, итогового регистра первого реверсивного двоичного счетчика, первого, второго и третьего двоичного умножителя, генератор несущей частоты соединен последовательно с третьим входом синхронного JK-триггера через фазосдвигающую цепь, компаратор, формирователь длительности импульса, отличающийся тем, что в него введена корректирующая отрицательная обратная связь с выхода полосового фильтра на его вход через нелинейный элемент (усилитель с насыщением) и фильтр с передаточной функцией (где T1 - постоянная времени фильтра, s - оператор преобразования Лапласа), выходы нелинейного элемента соединены с входами первого эммитерного повторителя и инвертора, и выход второго реверсивного двоичного счетчика является выходом относительного цифрового кода устройства.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171995C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2226695C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2004 |
|
RU2255340C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2002 |
|
RU2227920C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2359277C1 |
| Акселерометр | 1977 |
|
SU742801A1 |
| US 5396439 A, 07.03.1995 | |||
| US 7481111 B2, 27.01.2009. | |||

