Изобретение относится к измерительной технике, а именно к области электрических измерений сопротивления постоянному току двухполюсников, имеющих большую индуктивность.
В ГОСТ 3484.1-88 рекомендован способ измерения сопротивления постоянному току обмоток силовых трансформаторов, заключающийся в том, что через последовательно соединенные обмотку и амперметр пропускают постоянный ток от источника постоянного напряжения, и характеризующийся измерительным переходным процессом, при котором ток в обмотке и напряжение на ней изменяются одновременно по нелинейному закону. Измерение тока и напряжения для вычисления сопротивления в обмотке возможно только после окончания времени установления tуст их значений: tуст≈4,6⋅τ при установлении значений тока и напряжения с погрешностью δ=1% и tуст≈9,2⋅τ при δ=0,1%, где τ - постоянная времени обмотки трансформатора, равная τ=Lобм/Rобм. Из-за большого времени измерения по этому способу в большинстве современных приборов указанного назначения используется не источник напряжения, а источники тока - стабилизатор постоянного тока компенсационного типа.
Известен способ измерения сопротивления постоянному току обмоток трехфазного трансформатора (авт.св. СССР №788032, кл. МКИ G01R 27/00, 1980). Этот способ заключается в том, что токи одинаковой величины пропускаются одновременно по обмоткам трех фаз трансформатора, причем намагничивающие силы обмоток имеют одинаковое направление. Этим достигается отсутствие намагничивания сердечника трансформатора и быстрое установление измерительных токов. Недостатком этого способа является невозможность его применения при соединении обмоток трансформатора треугольником, звездой без вывода нейтрали, а также для однофазных трансформаторов.
В качестве прототипа, наиболее близкого к заявленному, выбран способ, реализованный в изобретении «Устройство для измерения активного сопротивления обмоток электротехнического оборудования» (патент РФ №2480774, кл. G01R 27/08, опубликован в Бюл. №12, 2013 г.).
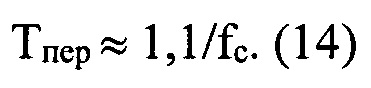
Способ заключается в том, что через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, величину которого рассчитывают на основе предварительного измерения сопротивления обмотки, измеряют падение напряжения на обмотке и эталонным резисторе и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки. Кроме того, на первом этапе, пока ток в обмотке нарастает до рассчитанного тока, увеличивают напряжение питания стабилизатора тока для сокращения длительности этапа благодаря увеличивающейся при этом скорости изменения тока, а на втором этапе, когда ток в обмотке установился почти равным рассчитанному току, но продолжает окончательно устанавливаться, снижают его для уменьшения мощности рассеивания на регулирующем транзисторе стабилизатора тока. Графики изменения тока и напряжения в обмотке представлены на фиг. 1.
Предварительное знание оценочного значения измеряемого сопротивления позволяет рассчитать и задать для каждого измеряемого сопротивления максимально возможную силу тока, ограничиваемую лишь мощностью стабилизатора тока.
На фиг. 1 видна динамическая ошибка регулирования тока в установившемся режиме. Это связано с переходными процессами, происходящими в стабилизаторе тока. Такие изменения тока вносят дополнительный вклад в погрешность измерения сопротивления, а также увеличивают время второго этапа.
Указанная динамическая ошибка обусловлена тем, что параметры регулятора стабилизатора тока, обеспечивающие наилучшее качество переходного процесса, сокращающего длительность этапа 2 (фиг. 1) до пренебрежимо малых значений, зависят от сопротивления и индуктивности нагрузки (в данном случае обмотки трансформатора), а эти величины при измерении сопротивления обмоток трансформаторов различного типа могут меняться в тысячи раз и более.
Задачей настоящего изобретения является уменьшение длительности второго этапа установления тока и повышение точности измерения.
Задача решается посредством использования адаптивного регулятора тока, который на этапе нарастания измерительного тока оценивает параметры обмотки объекта измерения и устанавливает коэффициент передачи регулятора тока таким, чтобы обеспечить высокую точность установления тока при минимальной длительности переходных процессов.
Измерение состоит из двух этапов. Первый этап - оценивание параметров обмотки при нарастании тока. Второй этап - этап стабилизации тока.
На первом этапе к обмотке приложено максимальное выходное напряжение источника и происходит нарастание тока до определенной доли, например до (95-99)%, от тока уставки. При этом в момент нарастания тока производятся измерения тока и напряжения для определения оценок сопротивления и индуктивности.
Рассмотрим зависимость напряжения на обмотке трансформатора от проходящего по ней тока:

Здесь Rобм - сопротивление обмотки постоянному току, Lобм - индуктивность обмотки.
Проинтегрировав уравнение (2) на интервале от tk-1 до tk методом трапеций, получаем:

где Т=tk-tk-1 - интервал времени между выборками.
В комбинации с результатами измерения на предыдущем шаге получаем систему уравнений в векторно-матричной форме:
где Z=[Rобм Lобм]Т - вектор параметров обмотки; I матрица выборок токов размерностью 2×2, причем компоненты матрицы:
i11(k)=i11(k-1)+T⋅iк;
i12(k)-i12(k-1)+T⋅i11(k);
i21(k)=i11(k-1);
i22(k)=i12(k-1);
U - вектор выборок напряжений размерностью 2×1, причем компоненты вектора:
u1(k)=u1(k-1)+u*(k)⋅T;
u2(k)=u1(k-1);
u*(k)=u*(k-1)+u(k)⋅T.
Тогда решение уравнения (4):
При известных оценках параметров системы можно построить регулятор тока, обеспечивающий высокие быстродействие и точность установления выходного тока на этапе регулирования (втором этапе), и при этом избежать неустойчивости системы.
Пусть в качестве регулятора тока используется пропорциональный регулятор. Параметрами пропорционального регулятора тока являются коэффициент передачи Кр и ток уставки. Ток уставки определяется как значение выходного сигнала, при котором рассогласование регулируемой и заданной величин равно нулю. При влиянии возмущающих воздействий возникает отклонение регулируемой величины. Пропорциональный регулятор при корректно выбранном коэффициенте передачи позволяет достичь определенной точности стабилизации (при завышенном коэффициенте будет наблюдаться самовозбуждение в системе, а при заниженном будут увеличиваться время стабилизации и ошибка). Выбирая коэффициент передачи по результатам этапа идентификации, можно реализовать адаптивный регулятор тока, который позволит для данного типа регулятора получить стабильное значение тока в пределах небольшой погрешности (статической ошибки регулирования), существенно сократив динамическую ошибку регулирования.
Найдем коэффициент передачи регулятора тока Кр и статическую ошибку регулирования тока δ.
Передаточная функция контура регулирования регулятора тока:

где
А=Kp⋅Kc/(Rобм+Rп),
τ=Lобм/(Rобм+Rп),
Rп - сопротивление проводников, соединяющих обмотку с прибором, Кс - коэффициент передачи цепи измерения тока (в простейшем случае он равен сопротивлению эталонного резистора в обратной связи источника тока).
При использовании в качестве регулятора тока микроконтроллера для описания процессов в контуре регулирования тока, строго говоря, следует пользоваться математическим аппаратом z-преобразования. В таком случае дискретная передаточная функция звена первого порядка с запоминающим элементом нулевого порядка имеет вид (см. Ротач В.Я. Теория автоматического управления. - М.: МЭИ, 2008, с. 291):

где d=ехр(-Т/τ), Т - период дискретизации аналого-цифрового преобразователя (АЦП) микроконтроллера.
В случае, если частота среза разомкнутой системы регулятора тока существенно меньше частоты дискретизации, можно заменить дискретное представление системы непрерывным без существенной потери точности. Тогда передаточная функция контура регулирования тока будет иметь вид (6).
Пусть выбранная частота среза системы
Тогда выполняется условие:
|W(j2πfcτ)|=1,
и потребный коэффициент передачи регулятора тока с учетом (6) приближенно равен

Статическая ошибка регулирования тока

с учетом (6) и (9) приблизительно
или в процентах
Время установления тока на втором этапе с точностью 0,1%

При выполнении условия (9) приблизительно
Рассмотрим два примера.
Пример 1. Обмотка высокого напряжения трансформатора ТЦ-630000/500 имеет сопротивление Rобм=0,42 Ом и индуктивность Lобм=70 Гн при токе 10А. Пусть сопротивление проводников, соединяющих обмотку с прибором, Rп=0,2 Ом. Период дискретизации АЦП микроконтроллера Т=100 мкс. Коэффициент передачи цепи измерения тока Кс=0,2 В/А. Выберем частоту среза системы, исходя из условия (8) fc=200 Гц (в 50 раз меньше частоты дискретизации; в этом случае эффект дискретизации несущественен). Тогда из (9) следует Кр=440000, из (12) - δ%=0,0007%, а из (14) - Тпер=5,5 мс. Таким образом, при установленном по данным измерений и вычислений на первом этапе коэффициенте передачи регулятора тока обеспечивается высокая точность стабилизации тока и малое время переходного процесса на втором этапе.
Пример 2. Обмотка низкого напряжения трансформатора ТМГ-630/10 имеет сопротивление Rобм=0,002 Ом и индуктивность Lобм=0,018 Гн при токе 10А. Остальные условия те же, что и в первом примере. Рассчитанные параметры регулятора тока суть Кр=113, δ%=0,89%, Тпер=5,5 мс.
В случае, если, как в прототипе, коэффициент передачи регулятора тока не меняется, то его следует выбирать из условия обеспечения устойчивости регулятора при любом объекте измерения. В рассмотренных примерах - это второй случай, т.е. следует выбрать Кр=113. При этом статическая ошибка регулирования для первого примера, как следует из формулы (10) с учетом (6), будет равной 2,6%, т.е. даже хуже, чем во втором примере, и для обмотки из первого примера время установления тока на втором этапе, как следует из формулы (13), Тпер=20,8 с, что заметно увеличивает общее время измерения.
Существенное отличие предлагаемого способа от прототипа заключается в том, что в прототипе результаты вычисления параметров обмотки на первом этапе используются для расчета изменения напряжения источника питания регулятора тока на втором этапе, а в предлагаемом способе эти данные применяются для вычисления коэффициента передачи регулятора тока.
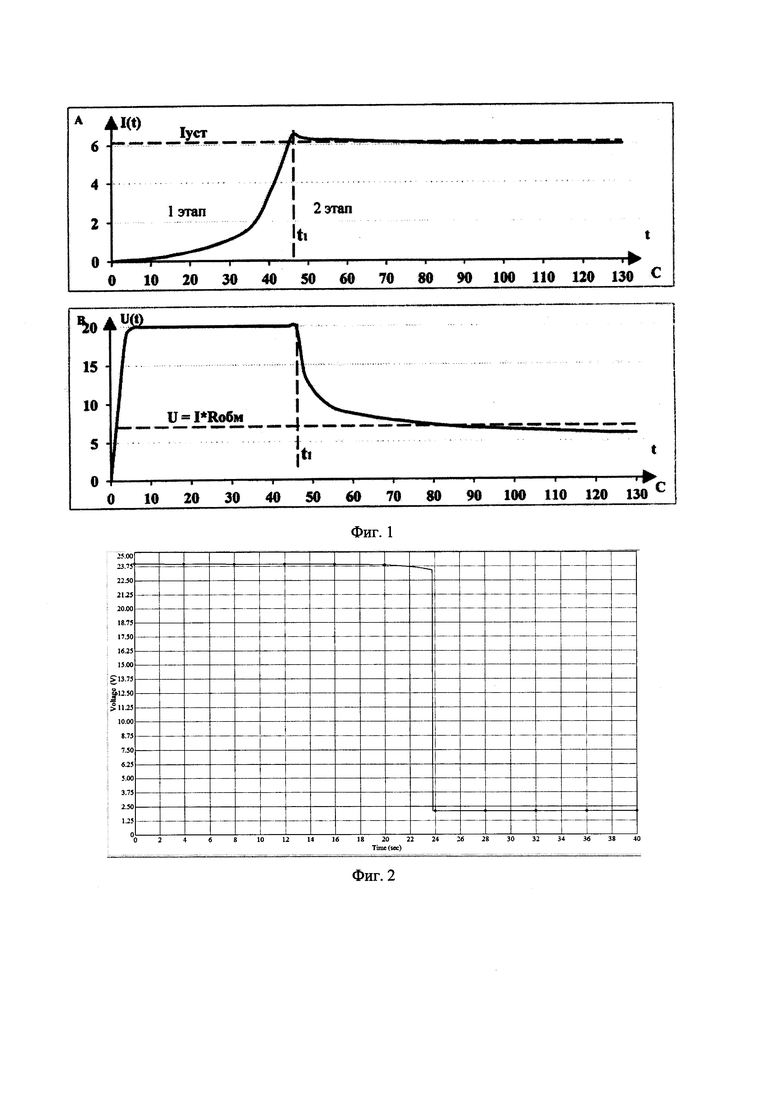
Предлагаемый способ проверен при моделировании измерения сопротивления обмотки высокого напряжения трансформатора ТДТН-31500/110 и обмотки низкого напряжения трансформатора ТМГ-630/10. Напряжение источника тока равно 20В, период дискретизации 100 мкс. Коэффициент передачи регулятора тока, вычисленный для первого случая, Кр=286000, сила измерительного тока - 6А. График изменения тока приведен на фиг. 3. Сравнивая этот график с графиком, представленным в описании к прототипу (фиг. 2), видим, что в нашем случае длительность переходного процесса второго этапа незначительна, а у прототипа она равна 10 с.
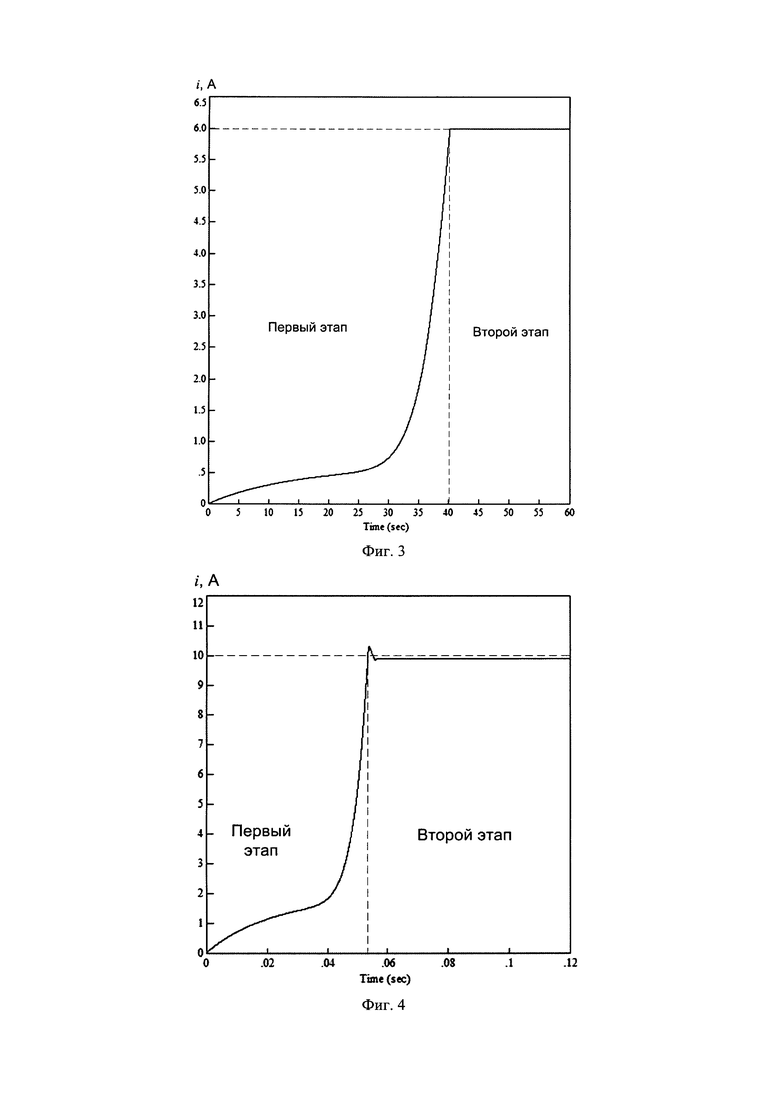
При измерении сопротивления обмотки низкого напряжения трансформатора ТМГ-630/10 вычисленный коэффициент передачи регулятора тока Кр=113. Измерительный ток - 10А. График изменения тока приведен на фиг. 4. Видно, что установление тока происходит за время приблизительно 0,055 с, причем длительность переходного процесса второго этапа составляет 6 мс.
В ООО «Челэнергоприбор» разработан и изготавливается миллиомметр ТРОМ-1, предназначенный для измерений сопротивления обмоток электрических машин, в том числе и трансформаторов (см. http://www.limi.ru/led.php?id_group=31). В алгоритме работы регулятора измерительного тока этого прибора применен заявляемый способ. Прибор прошел государственные испытания и внесен в Госреестр средств измерений РФ под № 67448-17.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения сопротивления постоянному току | 2018 |
|
RU2696365C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ ОБМОТОК ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2531850C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ И ИНДУКТИВНОСТИ РАССЕЯНИЯ ПЕРВИЧНОЙ ОБМОТКИ ТРАНСФОРМАТОРА НАПРЯЖЕНИЯ | 2012 |
|
RU2491559C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОСТИ РАССЕЯНИЯ ТРЕХФАЗНОЙ ВЫСОКОВОЛЬТНОЙ ОБМОТКИ СИЛОВОГО ТРАНСФОРМАТОРА | 2008 |
|
RU2377586C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ИСТОЧНИКОМ ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1995 |
|
RU2091972C1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| СПОСОБ УТИЛИЗАЦИИ ЭНЕРГИИ МОЛНИИ | 2008 |
|
RU2369991C1 |
| Сверхширокополосный преобразователь напряжённости магнитного поля | 2018 |
|
RU2693517C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНЫХ СОПРОТИВЛЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2245557C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРЕВА И УВЛАЖНЕНИЯ | 1992 |
|
RU2033674C1 |
Изобретение относится к измерительной технике, а именно к области электрических измерений сопротивления постоянному току двухполюсников, имеющих большую индуктивность. Технический результат, достигаемый изобретением, состоит в уменьшении длительности времени измерения и повышении точности. Способ измерения сопротивления постоянному току обмоток электротехнического оборудования заключается в том, что через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, вырабатываемый регулятором тока, далее измеряют падения напряжения на обмотке и эталонном резисторе и вычисляют их отношение. На основе этого отношения получают искомое сопротивление обмотки. Во время нарастания тока в обмотке до заданного значения выполняют измерения тока обмотки и напряжения на ней и производят оценку параметров обмотки. При этом после нарастания тока до величины, близкой к заданной, устанавливают коэффициент передачи регулятора тока, значение которого рассчитывают на основе измерений, производимых во время нарастания тока. 4 ил., 2 пр.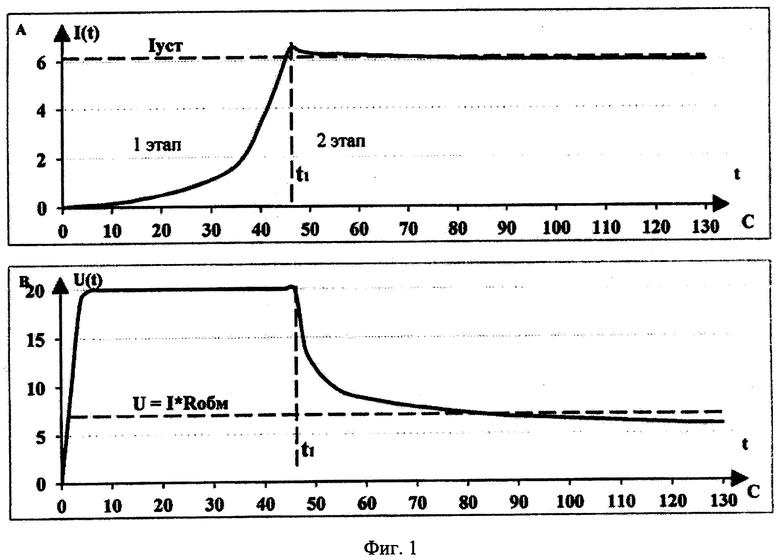
Способ измерения сопротивления постоянному току обмоток электротехнического оборудования, заключающийся в том, что через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, вырабатываемый регулятором тока, измеряют падения напряжения на обмотке и эталонном резисторе и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки, причем во время нарастания тока в обмотке до заданного значения выполняют измерения тока обмотки и напряжения на ней и производят оценку параметров обмотки, отличающийся тем, что после нарастания тока до величины, близкой к заданной, устанавливают коэффициент передачи регулятора тока, значение которого рассчитывают на основе измерений, производимых во время нарастания тока.
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ ОБМОТОК ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2531850C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АКТИВНОГО СОПРОТИВЛЕНИЯ ОБМОТОК ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ | 2011 |
|
RU2480774C2 |
| Способ измерения сопротивления обмоток трехфазного трансформатора | 1976 |
|
SU788032A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ ОБМОТОК ТРЕХФАЗНОГО СИЛОВОГО ТРАНСФОРМАТОРА С ВЫВЕДЕННОЙ НА КОРПУС НЕЙТРАЛЬЮ | 2004 |
|
RU2281523C1 |
| US 7106078 B1, 12.09.2006 | |||
| JP 2010203874 A, 16.09.2010. | |||

