Область техники
Изобретение относится к измерительной технике, а именно к области электрических измерений сопротивления постоянному току двухполюсников, имеющих большую индуктивность, например, обмоток трансформаторов, реакторов и электрических машин.
В ГОСТ 3484.1-88 рекомендован способ измерения сопротивления постоянному току обмоток силовых трансформаторов, заключающийся в том, что через последовательно соединенные обмотку и амперметр пропускают постоянный ток от источника постоянного напряжения, и характеризующийся измерительным переходным процессом, при котором ток в обмотке и напряжение на ней изменяются одновременно по нелинейному закону. Измерение тока и напряжения для вычисления сопротивления в обмотке возможно только после окончания времени установления tуст их значений: tуст ≈ 4,6τ при установлении значений тока и напряжения с погрешностью δ = 1% и tуст ≈ 6,9τ при δ = 0,1%, где τ – постоянная времени обмотки трансформатора, равная: τ = Lобм/Rобм. Из-за большого времени измерения по этому способу в большинстве современных приборов указанного назначения используется не источники напряжения, а источники тока – стабилизаторы постоянного тока компенсационного типа с обратной связью по току. Регулирование измерительного тока в обмотках трансформаторов представляет собой сложную задачу, поскольку параметры обмоток (индуктивность Lобм и сопротивление Rобм) различных трансформаторов могут отличаться очень сильно. В частности, постоянные времени τ цепи обмотки трансформаторов различных типов могут различаться в тысячи раз. Поэтому полоса пропускания регулятора (а, следовательно, и его быстродействие) также может меняться в тысячи раз. Кроме того, меняется и статический коэффициент усиления контура регулирования тока, который зависит от величины измеряемого сопротивления, что влияет на точность регулирования и стабильность измерительного тока.
Уровень техники
Известен способ, описанный в изобретении «Способ измерения сопротивления постоянному току обмоток электротехнического оборудования» (патент РФ № 2531850, кл. G01R 27/08, опубликован в Бюл. № 30, 2014 г.).
Способ заключается в том, что на первом этапе через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, величину которого рассчитывают на основе предварительного измерения сопротивления обмотки. Измеряют падения напряжений на обмотке и эталонном резисторе и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки. Причем во время нарастания тока в обмотке до рассчитанного тока максимально увеличивают напряжение питания стабилизатора тока, а на втором этапе после установления тока, равным рассчитанному, уменьшают это напряжение, что приводит к уменьшению скорости изменения тока во много раз и, как следствие, к сокращению длительности второго этапа.
Недостатком этого способа является сравнительно большое время установления тока на втором этапе.
В качестве прототипа, наиболее близкого к заявленному, выбран способ, описанный в изобретении «Способ измерения сопротивления постоянному току» (патент РФ № 2653173, кл. G01R 27/08, опубликован в Бюл. № 13, 07.05.2018 г.)
Указанный способ заключается в том, что через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, вырабатываемый регулятором тока, измеряют падения напряжения на обмотке и эталонном резисторе, и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки, причем во время нарастания тока в обмотке до заданного значения выполняют измерения тока обмотки и напряжения на ней и производят оценку параметров обмотки, а после нарастания тока до величины, близкой к заданной, устанавливают коэффициент передачи регулятора тока, значение которого рассчитывают на основе измерений, производимых во время нарастания тока.
На первом этапе к обмотке приложено максимальное выходное напряжение источника и происходит нарастание тока до определенной доли, например, до (95 – 99) % от тока уставки. При этом в момент нарастания тока производятся измерения тока и напряжения для определения оценок сопротивления Rобм и индуктивности Lобм.
Зависимость напряжения на обмотке трансформатора от проходящего по ней тока определяется уравнением:
uобм=i(t)·Rобм+Lобм·di/dt. (1)
Проинтегрировав уравнение (1) на интервале от tk-1 до tk методом трапеций, получаем:
Lобм·(iк – iк-1)+T·(iк+ iк-1)·Rобм/2= T·(uк+uк-1) /2, (2)
где Т = tk – tk-1 – интервал времени между выборками.
В комбинации с результатами измерения на предыдущем шаге получаем систему уравнений в векторно-матричной форме
U = I·Z, (3)
где Z = [Rобм Lобм]T – вектор параметров обмотки; I матрица выборок токов размерностью 2×2, причем компоненты матрицы:
i11(k)= i11(k -1) + T·iк;
i12(k)= i12(k -1) + T·i11(k);
i21(k)= i11(k-1);
i22(k)= i12(k-1);
U – вектор выборок напряжений размерностью 2×1, причем компоненты вектора:
u1(k)= u1(k-1) + u*(k)·T;
u2(k)= u1(k-1);
u*(k)= u*(k-1) + u(k)·T.
Тогда решение уравнения (3):
Z = U-1·I. (4)
В прототипе в качестве регулятора тока используется пропорциональный регулятор. Параметрами пропорционального регулятора тока являются коэффициент передачи Кр и ток уставки. Ток уставки определяется как значение выходного тока, при котором рассогласование регулируемой и заданной величин равно нулю. При влиянии возмущающих воздействий возникает отклонение регулируемой величины.
Коэффициент передачи регулятора тока Кр и статическая ошибка регулирования тока δ находится следующим образом.
Передаточная функция контура регулирования регулятора тока:
W(s) = A/(1 + s·τ), (5)
где
A = Кр⋅Kс/(Rобм + Rп),
τ = Lобм/(Rобм + Rп), (6)
Rп – сопротивление проводников, соединяющих обмотку с прибором, Kс – коэффициент передачи цепи измерения тока (в простейшем случае он равен сопротивлению эталонного резистора в обратной связи источника тока).
При использовании в качестве регулятора тока микроконтроллера для описания процессов в контуре регулирования тока, строго говоря, следует пользоваться математическим аппаратом z-преобразования. В таком случае дискретная передаточная функция звена первого порядка с запоминающим элементом нулевого порядка имеет вид (см., например, Ротач В.Я. Теория автоматического управления. – М.: МЭИ, 2008, с. 291):
W*(z) = [(z – 1)/z]·Z{W(s)/s}= A·(1 – d)/(z – d), (7)
где d = exp(–T/τ), Т – период дискретизации аналого-цифрового преобразователя (АЦП) микроконтроллера.
В случае, если частота среза разомкнутой системы регулятора тока существенно меньше частоты дискретизации, можно заменить дискретное представление системы непрерывным без существенной потери точности. Тогда передаточная функция контура регулирования тока будет иметь вид (5).
Пусть выбранная частота среза системы
fc<<1/T. (8)
Тогда выполняется условие:
|W(j2πfcτ)| = 1,
и потребный коэффициент передачи регулятора тока с учетом (5) приближенно равен
 . (9)
. (9)
Статическая ошибка регулирования тока
δ = 1/(1 + W(0)), (10)
с учетом (5) и (9), приблизительно
δ ≈ 1/2πfcτ, (11)
или в процентах
δ% ≈ 15,9/fcτ %. (12)
Время установления тока на втором этапе с точностью 0,1 %
Tпер = 6,9τ(Rобм + Rп)/(Кр⋅Kс + Rобм + Rп). (13)
При выполнении условия (8), приблизительно
Tпер ≈ 1,1/fc. (14)
Недостатком указанного способа является то, что при малой постоянной времени обмотки τ погрешность стабилизации измерительного тока может быть большой, что приведет к увеличению погрешности измерения сопротивления обмотки.
Осуществление изобретения
Задачей настоящего изобретения является уменьшение погрешности стабилизации измерительного тока и, как следствие, повышение точности измерения сопротивления обмотки постоянному току.
Задача решается путем реализации в микроконтроллере регулятора тока алгоритма пропорционально-интегрального (ПИ) регулирования.
В предлагаемом изобретении через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, вырабатываемый регулятором тока, измеряют падения напряжения на обмотке и эталонном резисторе, и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки, причем во время нарастания тока в обмотке до заданного значения выполняют измерения тока обмотки и напряжения на ней и производят оценку параметров обмотки, а после нарастания тока до величины, близкой к заданной, устанавливают коэффициент передачи регулятора тока, значение которого рассчитывают на основе измерений, производимых во время нарастания тока. При этом сигнал ошибки регулирования дополнительно интегрируют, причем коэффициент передачи интегрирующего звена регулятора тока устанавливают в соответствии со значениями параметров исследуемой обмотки, которые рассчитывают на основе измерений, производимых во время нарастания тока.
При наличии интегрирующего звена дискретная передаточная функция контура регулирования регулятора тока с учетом формулы (7) примет вид:

где Ки - коэффициент передачи интегрирующего звена ПИ-регулятора.
При выполнении условия

множители (z - d) в числителе и знаменателе передаточной функции (15) сокращаются, и дискретная передаточная функция контура регулирования регулятора тока примет вид:

т.е. контур регулирования тока будет включать только интегрирующее звено, которое обеспечит практически нулевую статическую ошибку и снижение ошибки в целом в полосе пропускания регулятора. При заданной частоте среза fc, в предлагаемом способе, как и в прототипе, коэффициент усиления Кр вычисляется по формуле (9). Таким образом, по результатам измерений напряжения на обмотке и тока через нее на первом этапе, по формулам (4), (6), (9) и (16) вычисляются параметры регулятора тока Кр и Ки, которые затем используются в алгоритме управления регулятором тока на втором этапе.
Краткое описание фигур
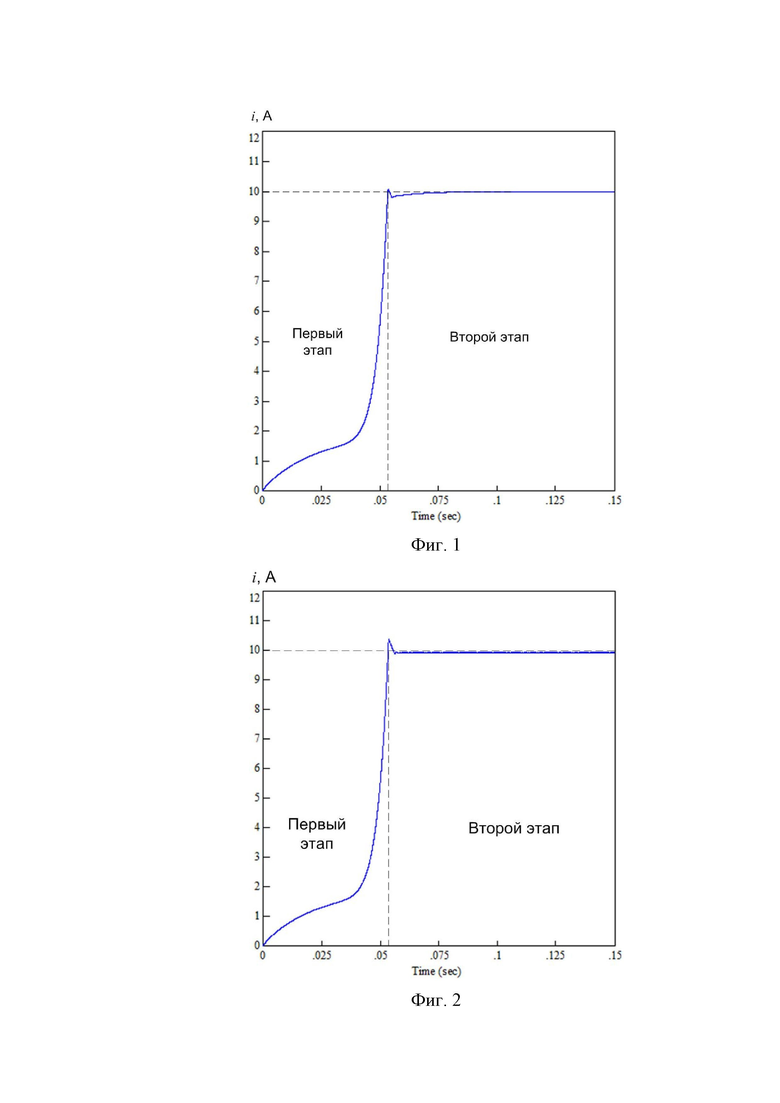
На фиг. 1 приведен график переходного процесса установления измерительного тока в обмотке трансформатора при использовании предлагаемого способа.
На фиг. 2 приведен график переходного процесса установления измерительного тока в обмотке трансформатора при использовании способа по патенту RU № 2653173.
Пример реализации
Предлагаемый способ проверен при моделировании измерения сопротивления обмотки низкого напряжения трансформатора ТМГ-630/10. Используется ПИ-регулятор. Напряжение источника тока равно 20 В, период дискретизации 100 мкс. Вычисленные по формулам (4), (6), (9) и (16) параметры регулятора суть Кр = 113, Ки = 2,2⋅10–4. Измерительный ток – 10 А. График изменения тока приведен на фиг. 1. Видно, что переходный процесс заканчивается менее, чем за 0,15 с. Небольшие кратковременные начальные изменения тока на втором этапе обусловлены избыточным накоплением данных в интеграторе регулятора на первом этапе (этапе нарастания тока). Погрешность установления силы измерительного тока практически отсутствует.
На фиг. 2 приведен график переходного процесса установления измерительного тока в этой же обмотке того же самого трансформатора при использовании способа, описанного в прототипе. Видно, что в этом случае ток устанавливается менее точно. Расчет погрешности установления силы измерительного тока по формуле (12), дает значение δ% = 0,89 %.
В ООО «Челэнергоприбор» разработан и изготавливается миллиомметр ТРОМ-1, предназначенный для измерений сопротивления обмоток электрических машин, в том числе и трансформаторов (см. http://limi.ru/product/milliometer_trom_1/). В алгоритме работы регулятора измерительного тока этого прибора применен заявляемый способ. Прибор прошел государственные испытания и внесен в Госреестр средств измерений РФ под №67448-17.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ | 2016 |
|
RU2653173C2 |
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ ОБМОТОК ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2531850C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ И ИНДУКТИВНОСТИ РАССЕЯНИЯ ПЕРВИЧНОЙ ОБМОТКИ ТРАНСФОРМАТОРА НАПРЯЖЕНИЯ | 2012 |
|
RU2491559C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНЫХ СОПРОТИВЛЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2245557C1 |
| Датчик несимметрии | 1977 |
|
SU663021A1 |
| Стабилизатор постоянного регулируемого тока (его варианты) | 1982 |
|
SU1057934A1 |
| Устройство для регулирования температуры вращающейся детали | 1977 |
|
SU661521A1 |
| Стабилизатор постоянного регулируемого тока | 1983 |
|
SU1112353A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТОКА | 1994 |
|
RU2091800C1 |
| Устройство для измерения температуры обмотки электрической машины | 1990 |
|
SU1781562A1 |
Изобретение относится к измерительной технике, а именно к области электрических измерений сопротивления постоянному току двухполюсников, имеющих большую индуктивность. Технический результат заключается в повышении точности измерений. Способ измерения сопротивления постоянному току обмоток электротехнического оборудования заключается в том, что через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, вырабатываемый регулятором тока, измеряют падения напряжения на обмотке и эталонном резисторе и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки. Далее во время нарастания тока в обмотке до заданного значения выполняют измерения тока обмотки и напряжения на ней, на основе результатов которых рассчитывают коэффициент передачи регулятора тока, на который после нарастания тока до величины, близкой к заданной, умножают сигнал ошибки регулирования. При этом после нарастания измерительного тока до величины, близкой к заданной, сигнал ошибки регулирования дополнительно интегрируют, причем коэффициент передачи интегрирующего звена регулятора тока устанавливают в соответствии со значениями параметров исследуемой обмотки, которые рассчитывают на основе измерений, производимых во время нарастания тока. 2 ил.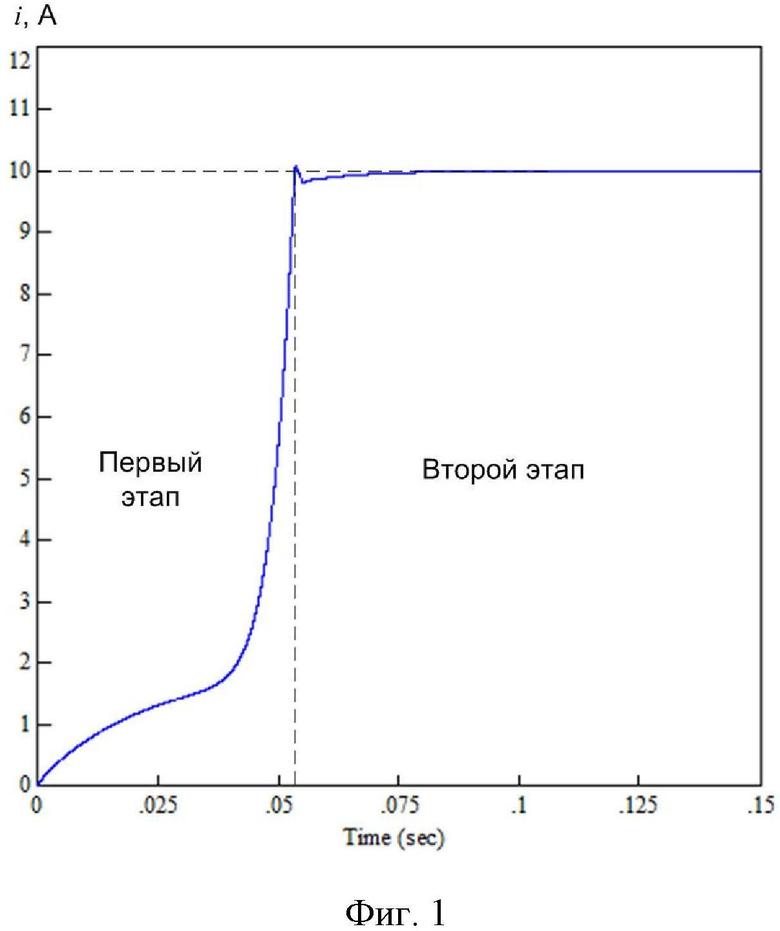
Способ измерения сопротивления постоянному току обмоток электротехнического оборудования, заключающийся в том, что через последовательно соединенные обмотку и эталонный резистор пропускают постоянный стабилизированный ток, вырабатываемый регулятором тока, измеряют падения напряжения на обмотке и эталонном резисторе и вычисляют их отношение, на основе которого получают искомое сопротивление обмотки, причем во время нарастания тока в обмотке до заданного значения выполняют измерения тока обмотки и напряжения на ней, на основе результатов которых рассчитывают коэффициент передачи регулятора тока, на который после нарастания тока до величины, близкой к заданной, умножают сигнал ошибки регулирования, отличающийся тем, что после нарастания измерительного тока до величины, близкой к заданной, сигнал ошибки регулирования дополнительно интегрируют, причем коэффициент передачи интегрирующего звена регулятора тока устанавливают в соответствии со значениями параметров исследуемой обмотки, которые рассчитывают на основе измерений, производимых во время нарастания тока.
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ ОБМОТОК ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2531850C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АКТИВНОГО СОПРОТИВЛЕНИЯ ОБМОТОК ЭЛЕКТРОТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ | 2011 |
|
RU2480774C2 |
| Способ измерения сопротивления обмоток трехфазного трансформатора | 1976 |
|
SU788032A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ПОСТОЯННОМУ ТОКУ ОБМОТОК ТРЕХФАЗНОГО СИЛОВОГО ТРАНСФОРМАТОРА С ВЫВЕДЕННОЙ НА КОРПУС НЕЙТРАЛЬЮ | 2004 |
|
RU2281523C1 |
| US 7106078 B1, 12.09.2006 | |||
| JP 2010203874 A, 16.09.2010. | |||

