[0001] Настоящее изобретение относится к контролирующей системе для контроля тепловой обработки, в частности, к контролирующей системе для контроля нагревания, выпекания или расстойки подлежащего нагреву пищевого продукта, такого как хлеб, тесто или тому подобный продукт.
[0002] Обработка пищевого продукта нагреванием осуществляется человечеством, вероятно, с момента овладения огнем. Однако вплоть до настоящего времени этой задачей все еще управляет оператор-человек. Задача настоящего изобретения состоит в автоматизации обработки пищевого продукта и, в частности, хлебопечения или расстойки таким образом, чтобы устранить необходимость участия человека в данном процессе.
[0003] Известны множество изобретений, решающих эту задачу. Например, в DE 102005030483 описана печь для тепловой обработки с открывающим устройством, которое открывается или закрывается автоматически. В DE 202011002570 описано устройство для тепловой обработки продовольственных продуктов и для приема их на носитель для продукта. Этот носитель снабжен системой управления для управления процессом обработки для определения типа и количества продуктов. Электронное управляющее устройство выбирает заданные данные для выполнения автоматической идентификации продуктов. Видеокамера, расположенная за пределами обрабатывающей камеры, может быть использована в качестве датчика. В ЕР 250169 А1 описана дверца выпекающей печи, в которую встроена видеокамера для визуализации муфельной или пекарной камеры. Визуализация имеет преимущество, состоящее в уменьшении потерь энергии, вызванных наблюдательными окнами. В US 020110123689 описана печь, которая содержит видеокамеру и датчик расстояния для извлечения признаков продукта в процессах нагревания. В DE 202011002570 U1 описана система с датчиком для захвата данных в печах.
[0004] Однако, до сих пор тепловая обработка пищевого продукта, в частности для выпекания хлеба с использованием печи, сопровождается ручным заданием параметров и происходит под надзором человека. Когда оператор-человек размещает хлеб в печи, должны быть заданы важные параметры, такие как температура, время и циркуляция. Обычно настройки сохранены в базе данных управляющих программ печи. Оператор-человек должен выбрать соответствующую программу, которая, тем не менее, все еще остается источником ошибки и превращает труд человека в некоторой степени в секрет производства. Кроме того, многие параметры обработки могут привести к некачественному продовольственному продукту. Хлеб может быть недопечен или перепечен, даже если программа выбрана правильно. Это может быть вызвано различиями в предварительном нагреве печи, подготовке теста, наружной температуре, наружной влажности, распределении при загрузке, времени открытия дверцы печи и многом другом. Таким образом, все еще имеется необходимость в использовании квалифицированного труда человека для управления тепловой обработкой пищевого продукта или выпеканием.
[0005] Кроме того, во время обработки пищевого продукта, например на фабрике-изготовителе для получения сырого теста или хлеба-полуфабриката, обрабатываемые объекты претерпевают множество технологических изменений. По причине неотъемлемых особенностей многих продовольственных продуктов, обрабатываемые объекты могут изменяться по форме, цвету, размеру и по многим другим параметрам. В этом состоит одна из ключевых проблем промышленной обработки пищевых продуктов, поскольку часто обрабатывающие устройства должны настраиваться именно для компенсации этих изменений. Следовательно, имеется необходимость в автоматизации технологических этапов обработки, что делает ручную регулировку в принципе ненужной. При выпекании, например, изменения характеристик муки могут привести к серьезным изменениям параметров промышленных устройств для изготовления теста. Например, может возникнуть необходимость в регулировании параметров смесителя, тестоделительной машины, устройств для формования теста, расстойки, режущей насадки, упаковки, программы выпекания печи или вакуумного выпекающего узла.
[0006] Для решения задачи, состоящей в автоматизации выпекания или обработки пищи, необходимо создать соответствующую контролирующую систему с данными, получаемыми от соответствующих контролирующих устройств. Следовательно, имеется потребность в контролирующей системе, содержащей контролирующие устройства для сбора подходящих данных.
[0007] Для продуктов, выпекаемых в печи, может быть использована контролирующая система с видеокамерой для контроля процесса выпекания через окно в печи. Однако для предотвращения тепловых потерь за счет рассеяния тепла через окно в известных печах такие смотровые окна выполнены из двойного стекла, т.е. они имеют внутреннее и наружное стеклянные окна. Следовательно, свет снаружи печи может проходить сквозь наружное стекло и отражаться в видеокамеру от внутреннего стекла, что приводит к искажению изображений выпекаемых продуктов.
[0008] Таким образом, необходимо создать контролирующую систему для контроля тепловой обработки, которая уменьшает искажения изображений выпекаемых продуктов, захваченных сквозь двойное стеклянное окно.
[0009] В обрабатывающих системах для обработки пищевых продуктов данные, касающиеся структуры обработанного пищевого продукта, должны быть получены без прерывания обработки пищевых продуктов для предотвращения снижения производительности. Следовательно, необходимо регулировать параметры этих устройств в системе для обработки пищевых продуктов или любого другого устройства для обработки пищевых продуктов на основании бесконтактных способов измерения.
[0010] Для обеспечения захвата, посредством контролирующих устройств, данных, пригодных для использования в автоматизированном выпекании или обработке пищевых продуктов, необходимо создать способ классифицирования множества изображений, записанных контролирующими устройствами, наблюдающими за областью обработки обрабатываемого пищевого продукта, и создать устройство, использующее этот способ.
[0011] После соответствующего классифицирования данных необходимо использовать преимущество когнитивных способностей для усовершенствования устройства для тепловой обработки в отношении гибкости, качества и эффективности. Это может быть дополнительно разделено на следующие задачи:
[0012] Необходимо создать систему, выполненную с возможностью получения в результате обучения экспертом-человеком знаний о том, как извлекать соответствующую информацию во время обработки пищевых продуктов и как управлять печью, причем эта система должна показывать целесообразное поведение в незнакомых ситуациях и должна быть выполнена с возможностью обучения без учителя.
[0013] Необходимо создать систему, повышающую за счет управления с обратной связью эффективность энергопитания с адаптацией к изменениям продолжительности обработки и поддерживающую необходимое состояние обработки пищевых продуктов.
[0014] Необходимо создать систему, имеющую гибкость в отношении выполнения задач обработки пищевых продуктов с индивидуальными различиями путем адаптации к различным типам пищевых продуктов или задач обработки.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0015] Эти задачи решены посредством контролирующей системы для контроля тепловой обработки согласно пунктам приложенной формулы.
[0016] В частности, для захвата изображения из камеры для тепловой обработки (печи) предпочтительно использовать освещение в комбинации с тонированием или затемнением наружного окна. Такой подход обеспечивает уменьшение влияния наружного света на обработку изображения печи в снимках. Рекомендуется тонировать окно по меньшей мере на 40%.
[0017] Для промышленной обработки пищевых продуктов предпочтительно использовать генератор лазерных линий или любой другой источник света, а также датчик-видеокамеру или любой другой оптический датчик для захвата информации об обрабатываемом пищевом продукте. С использованием процедуры, также известной как лазерная триангуляция, лазерная линия может быть спроецирована на объект измерения для получения его характеристик.
[0018] Кроме того, предпочтительно тепловая обработка пищевого продукта автоматизирована таким образом, что отсутствует необходимость в дополнительном взаимодействии с человеком, за исключением операций загрузки и разгрузки печи или машины для тепловой обработки. Однако даже этот этап в случае необходимости может быть автоматизирован. Для этого машина для тепловой обработки должна быть оборудована обрабатывающей камерой, которая контролируется видеокамерой и оборудована внутренним термодатчиком для определения температуры внутри обрабатывающей камеры, таким как термометр. Вместо использования видеокамеры также может быть использована матрица по меньшей мере из двух фотодиодов. Предпочтительным является использование увеличенного количества датчиков, генерирующих сигналы, относящиеся к влажности внутри обрабатывающей камеры, времени, вентиляции, распределению нагрева, объему загрузки, распределению загрузки, весу загрузки, температуре поверхности пищевого продукта и внутренней температуре обрабатываемого пищевого продукта. Также могут быть использованы следующие датчики: гигрометр, лазерная триангуляция, датчики температуры загрузки, акустические датчики, весы, таймеры и многие другие. Кроме того, могут быть использованы охлаждающие системы, соединенные с любым используемым чувствительным к теплу датчиком. Например, это может быть электрическая, воздушная или водяная охлаждающая система, такая как охлаждающий элемент Пельтье или вентилятор, термоэлектрический тепловой насос или паро-компрессионное охлаждение, и многое другое.
[0019] Кроме того, предпочтительно в процессе тепловой обработки пищевого продукта и, в частности, хлебобулочных изделий, машиной для тепловой обработки, такой как печь с камерой для тепловой обработки, внутренняя температура и внутреннее изображение, захваченное видеокамерой или другими датчиками, может быть использовано для управления параметрами обработки или электропитания. Согласно настоящему изобретению изображение видеокамеры является подходящим для обнаружения параметров, к которым относятся изменяющиеся объем и/или цвет пищевого продукта во время его нагревания. На основе эталонной машины, обученной или настроенной накануне, может быть определена машина для тепловой обработки, если обрабатываемый пищевой продукт находится в заданном ожидаемом состоянии процесса, и путем управления, использующего обратную связь, энергией тепловой обработки процесс обработки может быть настроен индивидуально. Ожидаемый результат процесса может быть достигнут в нескольких локально распределенных машинах для тепловой обработки путем распределения параметров, определенных ожидаемыми условиями процесса обработки пищевого продукта. Кроме того, данные используемых датчиков и выведенные данные обработки, в частности, изображение видеокамеры, могут быть использованы для определения типа и количества пищевого продукта на основании характеристик данных и, таким образом, запуска соответствующих вариантов процесса в автоматическом режиме.
[0020] Согласно одному варианту реализации настоящего изобретения, контролирующая система для контроля тепловой обработки содержит: машину для тепловой обработки, содержащую камеру для тепловой обработки, двойное стеклянное окно, содержащее внутреннее окно и наружное окно, и осветительное устройство для освещения внутренней части камеры для тепловой обработки, и контролирующее устройство, установленное в машине для тепловой обработки и содержащее видеокамеру для наблюдения внутренней части камеры для тепловой обработки сквозь внутреннее окно, причем визуальная светопередача наружного окна ниже чем визуальная светопередача внутреннего окна для уменьшения отражения внутри двойной стеклянной конструкции окна и воздействия внешнего освещения на обработку изображений, записанных видеокамерой. Предпочтительно наружное окно затемнено покрытием. Предпочтительно металлическая фольга или тонирующая фольга применены в наружном окне. Предпочтительно наружное окно содержит тонированное стекло. Предпочтительно наружное окно имеет максимальную визуальную светопередачу 60%. Предпочтительно двойное стеклянное окно является окном дверцы машины для тепловой обработки. Предпочтительно контролирующее устройство выполнено с возможностью генерирования обработанных в большом динамическом диапазоне (HDR) изображений пищевого продукта, подлежащего нагреву внутри камеры для тепловой обработки. Предпочтительно контролирующее устройство дополнительно содержит корпус и основание датчика-видеокамеры, на котором установлена видеокамера. Предпочтительно корпус оборудован теплоотводами и вентиляторами, обеспечивающими охлаждение видеокамеры. Предпочтительно машиной для тепловой обработки является конвекционная или одноярусная печь, имеющая по меньшей мере два лотка, расположенные пакетным способом. Предпочтительно видеокамера наклонена в горизонтальном и/или вертикальном направлениях относительно двойного стеклянного окна таким образом, что имеет возможность наблюдения по меньшей мере за двумя лотками одновременно в конвекционной или одноярусной печи. Предпочтительно контролирующая система для контроля тепловой обработки содержит по меньшей мере две видеокамеры для наблюдения за каждым лоток по отдельности. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит управляющий блок, выполненный с возможностью обработки и классифицирования изображений пищевого продукта, наблюдаемого видеокамерой, на основании обучающих данных для определения времени окончания процесса нагревания пищевого продукта. Предпочтительно управляющий блок выполнен с возможностью прекращения нагрева машины для тепловой обработки, когда процесс нагревания должен быть завершен. Предпочтительно управляющий блок выполнен с возможностью автоматического открывания дверцы машины для тепловой обработки, когда процесс выпекания должен быть завершен, или если управляющий блок выполнен с возможностью проветривания камеры для тепловой обработки холодным воздухом или обычным воздухом, когда процесс нагревания должен быть завершен.
[0021] Согласно другому варианту реализации настоящего изобретения, контролирующая система для контроля тепловой обработки содержит: измерительный блок, содержащий по меньшей мере один датчик для определения текущих измерительных данных о нагреваемом пищевом продукте, процессор для определения текущих данных о признаках из текущих измерительных данных и контролирующий блок, выполненный с возможностью определения текущего состояния процесса нагревания в текущем процессе нагревания контролируемого пищевого продукта путем сравнивания текущих данных о признаках с эталонными данными о признаках эталонного процесса нагревания. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит обучающий блок, выполненный с возможностью определения результата преобразования текущих измерительных данных в текущие данные о признаках и/или определения эталонных данных о признаках эталонного процесса нагревания на основании данных о признаках по меньшей мере одного обучающего процесса нагревания. Предпочтительно обучающий блок выполнен с возможностью определения результата преобразования текущих измерительных данных в текущие данные о признаках посредством дисперсионного анализа по меньшей мере одного обучающего процесса нагревания для уменьшения размерности текущих измерительных данных. Предпочтительно обучающий блок выполнен с возможностью определения результата преобразования текущих данных о признаках в данные о признаках посредством дисперсионного анализа по меньшей мере одного обучающего процесса нагревания для уменьшения размерности текущих данных о признаках. Предпочтительно дисперсионный анализ включает по меньшей мере одно из следующего: анализ главных компонент (РСА), изометрическое преобразование признаков (алгоритм ISOMAP), линейный дискриминантный анализ (LDA) и методика уменьшения размерности. Предпочтительно обучающий блок выполнен с возможностью определения эталонных данных о признаках эталонного процесса нагревания путем объединения заданных данных о признаках программы нагревания с обучающим набором данных о признаках по меньшей мере одного обучающего процесса нагревания, классифицируемого по предпочтению пользователя как часть обучающего набора. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит записывающий блок для записи текущих данных о признаках текущего процесса нагревания, причем обучающий блок выполнен с возможностью приема записанных данных о признаках от записывающего блока для использования в качестве данных о признаках обучающего процесса нагревания. Предпочтительно измерительный блок содержит видеокамеру, записывающую пиксельное изображение нагреваемого пищевого продукта, причем текущие измерительные данные видеокамеры соответствуют текущим пиксельным данным текущего пиксельного изображения. Предпочтительно текущие пиксельные данные содержат первые пиксельные данные, соответствующие первому цвету, вторые пиксельные данные, соответствующие второму цвету, и третьи пиксельные данные, соответствующие третьему цвету. Предпочтительно первый, второй и третий цвета соответствуют R, G и В соответственно. Предпочтительно видеокамера выполнена с возможностью генерирования обработанных пиксельных изображений в большом динамическом диапазоне в качестве текущих пиксельных данных. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит классифицирующий блок, выполненный с возможностью классифицирования типа подлежащего нагреву пищевого продукта и выбора эталонного процесса нагревания, соответствующего определенному типу пищевого продукта. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит управляющий блок, выполненный с возможностью переключения процесса нагревания с процесса расстойки на процесс выпекания на основании результата сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит управляющий блок, выполненный с возможностью управления отображающим блоком, который выполнен с возможностью индикации оставшегося времени процесса нагревания на основании результата сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания, соответствующим конечной точке нагрева и/или визуальным отображениям внутренней части камеры для тепловой обработки. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит управляющий блок, выполненный с возможностью предупреждения пользователя о времени, когда должен быть завершен процесс нагревания. Предпочтительно контролирующая система для контроля тепловой обработки дополнительно содержит управляющий блок, выполненный с возможностью управления терморегулятором нагревающей камеры, средства для регулирования влажности в камере для тепловой обработки путем добавления воды или пара, устройство управления вентиляционным механизмом, средства для регулирования скорости вентилятора, средства для регулирования разницы давлений между камерой для тепловой обработки и соответствующей средой, средства для задания кривой изменения температуры в зависимости от температуры в камере для тепловой обработки, средства для выполнения и регулирования различных процедур тепловой обработки, таких как расстойка или выпекание, средства для регулирования профилей внутренних потоков газа в камере для тепловой обработки, средства для регулирования интенсивности электромагнитного и звукового излучений соответствующих электромагнитных или звуковых излучателей для исследования или наблюдения свойств подлежащего нагреву пищевого продукта. Предпочтительно по меньшей мере один датчик измерительного блока содержит по меньшей мере одно из гигрометра, датчика температуры загрузки, датчика температуры обрабатывающей камеры, акустических датчиков, весов, таймера, видеокамеры, датчика изображений, матрицы фотодиодов, анализатора газа в обрабатывающей камере, средства для определения температурных профилей датчиков температуры загрузки, средства для определения электромагнитного или акустического излучения технологического облучения подлежащего обработке пищевого продукта, такого как свет или звук, отраженных или излученных в ответ на световые или звуковые излучатели или источники, средства для определения результатов объемных измерений подлежащего нагреву пищевого продукта, включая системы объемной или стерео видеокамеры или радара, или средства для определения типа, или состава, или шаблона, или оптических характеристик, или объема, или массы подлежащего обработке пищевого продукта.
[0022] Согласно другому варианту реализации настоящего изобретения, предложена контролирующая система для контроля тепловой обработки, содержащая: обрабатывающий нагревом или выпекающий блок для выпекания или расстойки подлежащих нагреву изделий или пищевых продуктов или технологическую линию для обработки пищевых продуктов; распределяющий лазерное излучение блок для генерирования первого лазерного луча и второго лазерного луча, а также для направления первого лазерного луча и второго лазерного луча к местоположению выпечки внутри выпекающего блока; первый светообнаруживающий блок для обнаружения отражения первого лазерного луча, рассеиваемого выпекаемыми изделиями; второй светообнаруживающий блок для обнаружения отражения второго лазерного луча, рассеиваемого выпекаемыми изделиями; измерительный блок для определения профиля высоты выпекаемых изделий согласно обнаружениям первого светообнаруживающего блока и второго светообнаруживающего блока; и подвижный блок для изменения расстояния между распределяющим лазерное излучение блоком и выпекаемыми изделиями. В настоящей заявке распределяющий лазерное излучение блок предпочтительно содержит: первый генерирующий лазерное излучение блок для генерирования первого лазерного луча; и второй генерирующий лазерное излучение блок для генерирования второго лазерного луча. Кроме того, распределяющий лазерное излучение блок предпочтительно содержит: основной генерирующий лазерное излучение блок для генерирования основного лазерного луча; оптический блок для генерирования первого лазерного луча и второго лазерного луча из основного лазерного луча. Оптический блок предпочтительно содержит: выполненное с возможностью перемещения и вращения зеркало, на которое направлен основной лазерный луч, для поочередного генерирования первого лазерного луча и второго лазерного луча путем перемещения и вращения относительно основного генерирующего лазерное излучение блока. Оптический блок предпочтительно содержит: полупрозрачное зеркало, на которое направлен основной лазерный луч, для генерирования первого лазерного луча и вспомогательного лазерного луча; и зеркало, на которое направлен вспомогательный лазерный луч, для генерирования второго лазерного луча. Первый лазерный луч предпочтительно направлен на первое местоположение; второй лазерный луч предпочтительно направлен на второе местоположение; часть выпекаемого изделия предпочтительно перемещена из первого местоположения во второе местоположение посредством перемещающего блока; и изменение профиля высоты части выпекаемого изделия предпочтительно определено измерительным блоком. Предпочтительно первый лазерный луч направлен на первый конец части выпекаемого изделия и имеет наклон меньше чем 45° относительно подложки, расположенной под частью выпекаемого изделия; второй лазерный луч направлен к второму концу части выпекаемого изделия, расположенному напротив первого конца, и имеет наклон меньше чем 45° относительно подложки; и минимальный угол между первым лазерным лучом и вторым лазерным лучом больше чем 90°. Предпочтительно перемещающим блоком является транспортерная лента, которая перемещает выпекаемые изделия через выпекающий блок. Предпочтительно распределяющий лазерное излучение блок расположен внутри выпекающего блока; первый и второй лазерные лучи направлены непосредственно из распределяющего лазерное излучение блока к выпекаемым изделиям. Предпочтительно генерирующие лазерное излучение блоки расположены снаружи выпекающего блока; и лазерные лучи направлены к выпекаемым изделиям посредством отклоняющих зеркал. Предпочтительно светообнаруживающие блоки расположены снаружи выпекающего блока; и отражение лазерных лучей направлено к светообнаруживающим блокам направляющими зеркалами.
Предпочтительно зеркала являются нагретыми. Предпочтительно первый и второй лазерные лучи являются веерообразными; и отражение первого и второго лазерных лучей сфокусировано на первом и втором светообнаруживающих блоках посредством линз. Предпочтительно оптическая система, сформированная распределяющим лазерное излучение блоком, выпекаемыми изделиями и светообнаруживающими блоками, удовлетворяет принципу Шаймпфлюга. Способ контроля выпекания согласно настоящему изобретению включает этапы, на которых: обрабатывают выпекаемые изделия в выпекающем блоке, перемещают выпекаемые изделия сквозь выпекающий блок, генерируют первый лазерный луч и второй лазерный луч и направляют первый лазерный луч и второй лазерный луч к местоположению выпекаемых изделий внутри выпекающего блока, обнаруживают отражение первого лазерного луча, рассеянного выпекаемыми изделиями, обнаруживают отражение второго лазерного луча, рассеянного выпекаемыми изделиями, и определяют профиль высоты выпекаемых изделий согласно обнаружениям рассеянных первого и второго лазерных лучей.
[0023] Сопроводительные чертежи, включенные в настоящую заявку, обеспечивают дополнительное понимание настоящего изобретения, составляют часть настоящей заявки, показывают вариант (варианты) реализации настоящего изобретения и вместе с описанием служат для объяснения принципа настоящего изобретения. На чертежах:
[0024] На фиг. 1А и 1В схематически показаны поперечный разрез и вид сбоку варианта реализации контролирующей системы для контроля тепловой обработки.
[0025] На фиг. 2А и 2В показаны свойства отражения известного двойного стеклянного окна и двойное стеклянное окно согласно одному варианту реализации контролирующей системы для контроля тепловой обработки.
[0026] На фиг. 3 схематически показаны различные виды другой контролирующей системы для контроля тепловой обработки.
[0027] На фиг. 4 схематически показан вид одного варианта реализации датчика изображений.
[0028] На фиг. 5 схематически показан вид другого варианта реализации датчика изображений.
[0029] На фиг. 6А и 6В схематически показаны вид спереди и вид сбоку другого варианта реализации контролирующей системы для контроля тепловой обработки.
[0030] На фиг. 7 схематически показан вид одного варианта реализации камеры для тепловой обработки.
[0031] На фиг. 8 схематически показан вид одного варианта реализации технологического оборудования для обработки пищевого продукта.
[0032] На фиг. 9 схематически показан вид одного варианта реализации технологического оборудования для обработки пищевого продукта с использованием лазерной триангуляции.
[0033] На фиг. 10 схематически показан вид другого варианта реализации технологического оборудования для обработки пищевого продукта с использованием лазерной триангуляции.
[0034] На фиг. 11 схематически показан вид сверху одного варианта реализации лотка с указателем места для размещения теста.
[0035] На фиг. 12 схематически показан вид одного варианта реализации измерительной системы, встроенной в стеллаж печи.
[0036] На фиг. 13 показана схема потока обработки данных согласно одному варианту реализации контролирующей системы для контроля тепловой обработки.
[0037] На фиг. 14 показан когнитивный контур "восприятие-действие" для машин, изготавливающих пищевой продукт, с датчиками и приводными устройствами согласно настоящему изобретению.
[0038] На фиг. 15 показаны категории линейных и нелинейных способов уменьшения размерности.
[0039] На фиг. 16 показано преобразование двумерных данных испытаний в трехмерное пространство с оптимальным линейным разделителем.
[0040] На фиг. 17 показана архитектура согласно настоящему изобретению и группы компонентов для проектирования агентов для контроля процессов или для обеспечения управления с обратной связью в системах для изготовления пищевых продуктов с использованием модели черного ящика сдатчиками и приводными устройствами.
[0041] На фиг. 18А схематически показан в разрезе один вариант реализации контролирующей системы для контроля тепловой обработки.
[0042] На фиг. 18В показана блок-схема одного варианта реализации контролирующей системы для контроля тепловой обработки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0043] На фиг. 1А и 1В показана контролирующая система 100 для контроля тепловой обработки согласно одному варианту реализации настоящего изобретения. На фиг. 1А схематически показан в разрезе вид сверху контролирующей системы 100, в то время как на фиг. 1В схематически показан вид спереди системы 100.
[0044] Как показано на фиг. 1А и 1В, контролирующая система 100 для контроля тепловой обработки, или контролирующая система 100 для контроля выпекания, или контролирующая система 100 для контроля расстойки и/или выпекания содержит печь 110 с камерой для тепловой обработки или камерой 120 печи, по меньшей мере одним окном 130, имеющим двойное стекло, в боковой стенке печи 110 и осветительным устройством 140, расположенным внутри камеры 120 печи.
[0045] Машина для тепловой обработки или печь 110 может быть любой печью, которую обычно используют для приготовления пищевого продукта, в частности для выпекания или расстойки хлеба. Пищевой продукт может быть приготовлен в печи различными способами. Печь может быть печью конвекционного типа или печью излучательного типа.
[0046] Камера для тепловой обработки или камера 120 печи занимает большую часть внутренней части печи 110. Пищевой продукт приготовляют внутри камеры 120. Пищевой продукт может быть размещен на лотках, которые в различном количестве могут поддерживаться стенками камеры печи. Пищевой продукт также может быть размещен на тележках с несколькими лотками, выполненных с возможностью перемещения внутри камеры 120. Внутри камеры 120 размещен источник тепла, который используется для приготовления пищевого продукта. Кроме того, внутри камеры печи также может быть размещена вентиляционная система для более равномерного распределения тепла, выработанного источником тепла.
[0047] Внутренняя часть печи или камеры для тепловой обработки освещена осветительным устройством 140. Осветительное устройство 140 может быть расположено в печи или камере для тепловой обработки как показано на чертеже, представленном на фиг. 1А. Осветительное устройство 140 также может быть расположено снаружи камеры 120 и может освещать камеру 120 сквозь окно. Осветительное устройство 140 может быть любым известным устройством для излучения света, например, лампой накаливания, галогеновой лампой, светодиодом или комбинацией нескольких из этих устройств. Осветительное устройство 140 может быть сфокусировано на пищевом продукте, приготовляемом в камере 120. В частности, осветительное устройство 140 может быть настроено или сфокусировано таким образом, что имеется высокий контраст между приготовляемым пищевым продуктом и окружающей средой внутри камеры 120 или между пищевым продуктом и лотком и/или тележками, на которых расположен пищевой продукт. Такой высокий контраст также может поддерживаться или создаваться исключительно путем использования специальных цветов для излучаемого осветительным устройством 140 света.
[0048] В стенке камеры 120 выполнено окно. Для устранения потерь тепла из камеры 120 окно предпочтительно представляет собой двойное стеклянное окно 130, содержащее наружную стеклянную панель или наружное окно 135 и внутреннюю стеклянную панель или внутреннее окно 136. Двойное стеклянное окно 130 может препятствовать передаче тепла между внутренним окном 136 и наружным окном 135 за счет специального газа или вакуума между внутренним окном 136 и наружным окном 135. Двойное стеклянное окно 130 также может быть охлаждено воздушной вентиляцией между внутренним окном 136 и наружным окном 135 для препятствования нагреву наружного окна 135, причем в этом случае специальный газ или вакуум не используются между внутренним окном 136 и наружным окном 135. Осветительное устройство 140 также может быть расположено между внутренним окном 136 и наружным окном 135. Наружная поверхность наружного окна 135 является менее горячей и, таким образом, наиболее подходящей для размещения видеокамеры 160. Использование оптического туннеля между внутренним окном 136 и наружным окном 135 может быть дополнительным преимуществом, поскольку оно опять же уменьшает отраженные и прямые тепловые лучи.
[0049] Сквозь двойное стеклянное окно 130 можно наблюдать за процессом приготовления или выпекания пищевого продукта в камере 120 снаружи машины для тепловой обработки или печи.
[0050] Как показано на фиг. 1В, контролирующее устройство 150 установлено на машине для тепловой обработки или печи 110. Контролирующее устройство 150 установлено сквозь наружное окно 135 двойного стеклянного окна 130 и содержит расположенную рядом с наружным окном 135 видеокамеру 160, которая используется для наблюдением за пищевым продуктом в камере 120 во время его приготовления или выпекания. Видеокамера 160 может быть любой известной видеокамерой, выполненной с возможностью сбора видеоданных в читаемой компьютером форме. Видеокамерой 160 может быть, например, видеокамера на основе устройства с зарядовой связью (CCD) или видеокамера на основе комплементарного металло-оксидного полупроводника (CMOS). Видеокамера 160 получает изображения приготовленного пищевого продукта во время процедуры его приготовления. Как будет описано ниже, эти изображения могут быть использованы для автоматического управления процессом приготовления или выпекания пищевого продукта. Несмотря на то, что видеокамера 160 для облегченного интегрирования в контролирующее устройство 150 предпочтительно установлена снаружи наружного окна 135, через которое видеокамера 160 наблюдает внутреннюю часть камеры для тепловой обработки 120 сквозь двойное стеклянное окно 130, видеокамера 160 также может быть размещена между внутренним окном 136 и наружным окном 135 для наблюдения внутренней части камеры для тепловой обработки сквозь внутреннее окно 136.
[0051] Однако, если наружный источник света находится за пределами камеры 120 печи перед двойным стеклянным окном 130, возникает проблема.
[0052] Как показано на фиг. 2А, раздражающий свет 272, излученный наружным источником 270 света, может проходить сквозь наружное окно 235' двойного стеклянного окна, но может быть отражен внутренним окном 236 в видеокамеру 260, наблюдающей за приготовляемым пищевым продуктом 280. Таким образом, видеокамера 260 принимает не только свет 282, излученный или отраженный от пищевого продукта 280, но также и раздражающий свет 272, отраженный внутренним окном 236. Результатом является искажение видеоданных, полученных от видеокамеры 260, которое, таким образом, может неблагоприятно влиять на процесс автоматического выпекания.
[0053] В настоящем варианте реализации это неблагоприятное воздействие устранено путем препятствования прохождению раздражающего света сквозь наружное окно 235. Это может быть достигнуто тонированием или затемнением наружного окна 235. В результате чего раздражающий свет 272 отражается или поглощается наружным окном 235 и не достигает внутреннего окна 236. Следовательно, раздражающий свет 272 не отражается в видеокамеру 260 внутренним окном 236, и видеокамера 260 захватывает только правильное видеоизображение пищевого продукта 280. Таким образом, согласно настоящему варианту реализации искажение автоматизированной процедуры изготовления пищевых продуктов устранено тонированием или затемнением наружного окна 235.
[0054] Таким образом, для захвата изображения из камеры 120 для тепловой обработки печи 110 предпочтительно использовать осветительное устройство 140 в комбинации с тонированием или затемнением наружного окна 235. Это обеспечивает уменьшенное воздействие наружного света на обработку изображений внутренней части печи.
[0055] Согласно настоящему изобретению визуальная светопередача наружного окна 135 ниже, чем визуальная светопередача внутреннего окна 136. В настоящей заявке визуальная светопередача наружного окна 135 составляет 95%, предпочтительно 80% и, в частности, 60% от визуальной светопередачи внутреннего окна 136. Кроме того, наружное окно 235 двойного стеклянного окна 130 предпочтительно может иметь максимальную визуальную светопередачу 75%. Визуальная светопередача представляет собой коэффициент пропускания света, падающего перпендикулярно на стеклянную поверхность окна, в видимом диапазоне длин волн, т.е. между 380 нм и 780 нм. Поэтому, более предпочтительным является тонирование окна по меньшей мере на 40%, и, таким образом, максимальная визуальная светопередача составляет 60%. Иными словами, по меньшей мере 40% входящего света поглощаются или отражаются наружным окном 235, и 60% света передаются сквозь наружное окно 235. Внутреннее окно 236 может иметь визуальную светопередачу обычного стекла. Более предпочтительным является тонирование окна по меньшей мере на 60%, в результате чего коэффициент пропускания света составит 40%. Тонирующие покрытие или фольга могут быть применены предпочтительно в наружном окне двойной стеклянной дверце печи для препятствования искажению цветопередачи покрытием из-за тепловых эффектов. По причине затемнения наружного окна отражения света, приходящего снаружи печи, могут быть значительно уменьшены. Окно дверцы печи может быть затемнено металлической фольгой или покрытием (зеркальное окно) или тонирующей фольгой. Окно дверцы печи может быть тонированным окном, имеющим, например, наружное тонированное и/или содержащим тонированное стекло. Если видеокамера установлена на наружном окне 135, затемнение или отражательная способность наружного окна 135 в области видеокамеры могут быть уменьшены, например, путем создания отверстия в покрытии для обеспечения возможности наблюдения за видеокамерой сквозь это отверстие в покрытии наружного окна 135, причем область отверстия не включена в определение коэффициента пропускания наружного окна 135.
[0056] Печь или машина 110 для тепловой обработки дополнительно могут содержать дверцу печи или дверцу машины для тепловой обработки, посредством которой камера 120 может быть открыта и закрыта. Дверца печи может содержать окно, сквозь которое можно наблюдать камеру 120 печи. Предпочтительно это окно представляет собой двойное стеклянное окно 130 для устранения тепловых потерь энергии нагрева камеры 120. Таким образом, контролирующая система 100 для контроля тепловой обработки может представлять собой контролирующее устройство 150 и печь 110, содержащую контролирующее устройство 150, или печь 110, содержащую контролирующее устройство 150, установленное на дверце печи.
[0057] Таким образом, также могут быть уменьшены отражения внутри двойной стеклянной конструкции окна дверцы печи. Следовательно, влияния наружного освещения на обработку изображения являются несущественными. Таким образом, при соответствующей интенсивности освещения камеры 120 печи внутренняя часть камеры 120 может наблюдаться видеокамерой 160 контролирующего устройства 150.
[0058] На фиг. 3 показаны виды различных вариантов реализации контролирующей системы для контроля тепловой обработки, показанной на фиг. 1А и 1В.
[0059] Как показано на фиг. 3, контролирующее устройство 350 установлено на передней стороне одноярусной печи 310 контролирующей системы 300 для контроля тепловой обработки. Контролирующее устройство 350 содержит корпус, основание датчика видеокамеры и видеокамеру, установленную на основании датчика видеокамеры, для наблюдения за внутренней частью камеры печи сквозь окно 330 дверцы печи. Видеокамера установлена с наклоном в горизонтальном и/или вертикальном направлении относительно окна 330 дверцы печи таким способом, чтобы имелась возможность одновременного наблюдения по меньшей мере за двумя противнями в одноярусной печи 310.
[0060] Согласно другому варианту реализации кронштейн датчика и корпус охлаждаются вентиляторами для внутренней части. Кроме того, как может быть видно на фиг. 4 и 5, основание датчика видеокамеры контролирующего устройства 350 может быть оборудовано теплоотводами и вентиляторами для обеспечения охлаждения. Кронштейн датчика и корпус могут быть оптимизированы для достижения оптимального угла наблюдения одновременно за двумя противням в печи.
[0061] На фиг. 6А и 6В показаны вид сверху и вид сбоку другого варианта реализации контролирующей системы для контроля тепловой обработки, показанной на фиг. 1А и 1В соответственно.
[0062] Как показанный на фиг. 6А, контролирующее устройство 650 установлено на печи 610 контролирующей системы 600 для контроля тепловой обработки. Контролирующее устройство 650 частично перекрывается двойным стеклянным окном 630 дверцы 632 печи. Контролирующее устройство 650 содержит видеокамеру в корпусе. Кроме того, контролирующее устройство 650 содержит отображающее устройство 655, которое обеспечивает возможность отображения информации для пользователя и предоставляет пользователю возможность взаимодействия.
[0063] Печь 610 может представлять собой печь с конвективным обогревом сверху и двухъярусные печи внизу, как показано на фиг. 6А и 6В.
[0064] Кроме того, согласно одному варианту реализации контролирующее устройство 150 может содержать сигнальное устройство для оповещения пользователя об завершении процесса выпекания. Кроме того, контролирующее устройство 150 может содержать управляющий выход для остановки, например, тепловой обработки в печи 110 и/или автоматического открывания дверцы печи и/или проветривания камеры 120 печи холодным или обычным воздухом. Печь 110 и контролирующее устройство 150 вместе образуют контролирующую систему 100 для контроля тепловой обработки.
[0065] Согласно дополнительному варианту реализации контролирующее устройство 150 выполнено с возможностью генерирования обработанных в большом динамическом диапазоне (HDR) изображений предметов выпекания внутри камеры 120 печи. Это в частности является предпочтительным в комбинации с тонированным наружным окном 135, поскольку интенсивность света, приходящего из внутренней части пекарной камеры 120 уменьшена тонирующей фольгой, и обработка в большом динамическом диапазоне обеспечивает возможность улучшенной сегментации. Кроме того, при использовании обработки в большом динамическом диапазоне может быть улучшен контраст между предметами выпекания и окружающей их средой, например, стенками печи или лотками. Это обеспечивает возможность более точного определения контура или формы предметов выпекания посредством контролирующей системы 100 для контроля тепловой обработки.
[0066] На фиг. 7 показана возможная установка датчика для обрабатывающей камеры 720 согласно дополнительному варианту реализации. Как и прежде, обрабатывающая камера 720 контролируется по меньшей мере одной видеокамерой 760. Видеокамера 760 также может содержать датчик изображения или матрицу фотодиодов по меньшей мере с двумя фотодиодами. Предпочтительным является использование двух и большего количества видеокамер для контроля нескольких лотков, которые могут иметь различную загрузку. По меньшей мере одна видеокамера 760 может быть расположена внутри обрабатывающей камеры 720, однако предпочтительным является применение окна, которое уменьшает тепловое воздействие на видеокамеру (видеокамеры) 760, в частности двойного стеклянного окна 730. Двойное стеклянное окно 730 может быть выполнено в любой стенке обрабатывающей камеры.
[0067] Как описано выше, предпочтительным является применение освещения в обрабатывающей камере 720 путем встраивания по меньшей мере одного осветительного устройства, такого как, например, лампа накаливания или светодиод (LED). Соответствующее освещение обрабатывающей камеры облегчает захват видеокамерой полноценного изображения. Дополнительно предпочтительным является освещение светом по меньшей мере с одной конкретной длиной волны и применение фильтра для соответствующей длины волны для видеокамеры или фотодиода или матрицы 760 фотодиодов. Это дополнительно повышает надежность визуальной контролирующей системы. Если выбрана длина волны в инфракрасном диапазоне или близком к инфракрасному диапазону, и датчик 760 изображений вместе с дополнительными фильтрами соответственно выбраны для этой длины волны, то визуальная контролирующая система может собирать информацию, относящуюся к распределению температур, что может быть важным для некоторых способов обработки пищевого продукта.
[0068] Видеокамера или визуальная система 760 могут быть оборудованы специализированной системой линз, которая оптимизирует визуализацию пищевого продукта. Нет необходимости в захвате изображения всего загруженного пищевого продукта, поскольку состояние обработки загруженного пищевого продукта является совершенно одинаковым для всего загруженного пищевого продукта. Кроме того, видеокамера может быть оборудована системой для автофокусирования и средствами для оптимизации яркости. Предпочтительным является использование нескольких датчиков 760 изображений для конкретных длин волн с целью сбора информации об изменениях цвета, соотнесенных со степенью обработки пищевого продукта. Предпочтительным является расположение видеокамеры или датчиков 760 изображений для сбора информации об изменении объема пищевого продукта во время тепловой обработки. В частности, предпочтительным может быть расположение для получения вида сверху пищевого продукта.
[0069] Также может быть предпочтительным присоединение второй дверцы печи или отверстия обрабатывающей камеры к уже существующей открывающей системе. В этом случае система датчика или, в частности, видеокамера и осветительный узел могут быть размещены в верхней части окна дверцы печи. Эта вторая дверца в верхней части основной дверцы или двухдверной системы может быть применена, если система датчика модернизирована для печи.
[0070] Каждое из контролирующих устройств, описанных выше, может быть установлено с передней стороны печи, как показано, например, на фиг. 1А, 1В, 3, 4А и 4В. Контролирующее устройство содержит корпус, кронштейн видеокамеры и видеокамеру, установленную на кронштейне, для наблюдения за внутренней частью камеры печи сквозь окно дверцы печи. Видеокамера наклонена таким образом в горизонтальном и/или вертикальном направлении относительно окна дверцы печи, что может контролировать по меньшей мере одновременно два противня в одноярусной печи. Контролирующее устройство дополнительно может содержать сигнальное устройство для извещения пользователя о завершении процесса выпекания. Кроме того, контролирующее устройство может содержать управляющий выход для прекращения, например, нагрева печи и/или автоматического открывания дверцы печи и/или проветривания камеры печи холодным или обычным воздухом. Печь и контролирующее устройство вместе образуют контролирующую систему для контроля тепловой обработки.
[0071] Как описано выше, для наблюдения за процессом выпекания используется один датчик-видеокамера. Согласно другому варианту реализации предпочтительным является использование нескольких датчиков-видеокамер. Если каждый лоток внутри камеры для тепловой обработки имеет по меньшей мере один выровненный с ним датчик-видеокамеру, контролирующая и управляющая программа может получать информацию выборочно для каждого лотка. Таким образом, может быть вычислено оставшееся время выпекания для каждого лотка.
[0072] Оставшееся время выпекания может быть использовано для предупреждения пользователя печи об открывании дверцы и извлечения по меньшей мере одного из лотков, если время выпекания закончилось раньше, чем для других лотков. Согласно настоящему изобретению пользователь может быть предупрежден посредством дистанционной системы или информационно-вычислительной системы. Предупреждение может быть отображено в окне вебсайта, на экране смартфона или проблесковым светом рядом с прилавком. Преимущество такого подхода состоит в том, что пользователь предупрежден на своем обычном рабочем месте, которое может быть расположено на расстоянии от печи.
[0073] Согласно другому варианту реализации контролирующая система согласно настоящему изобретению может быть использована в промышленных производственных системах для приготовления пищевого продукта, например, линиях выпечки или предварительной выпечки, или в системах для подготовки теста, которые формируют и дозируют тесто. Однако, контролирующая система также может быть использована в любой другой области приготовления или обработки пищевого продукта.
[0074] На фиг. 8 показана контролирующая система 800 по меньшей мере с одной установленной измерительной системой 850 для машин для тепловой обработки или печей 810 (выпекающих блоков) с ленточным транспортером 815 (перемещающим блоком). Эти печи 810 обычно используют в промышленных системах для приготовления пищевого продукта.
[0075] Измерительная система 850 может содержать по меньшей мере один датчик из следующих: гигрометр, датчик температуры загрузки, датчик температуры обрабатывающей камеры, акустические датчики, лазерная триангуляция, весы, таймер, видеокамера, датчик изображений, матрица фотодиодов. Частью этой измерительной системы 850 также являются вспомогательные устройства, такие как алгоритмы освещения или охлаждения, или перемещения.
[0076] Согласно одному варианту реализации лазерная триангуляция может быть использована для получения информации относительно объема пищевого продукта. Кроме того, измерительная система 850 содержит блок для распределения лазерного излучения, который генерирует и направляет лазерные лучи к выпекаемому пищевому продукту в печи или выпекающем блоке 810. Блок для распределения лазерного излучения может направлять лазерные лучи на одиночную часть выпекаемого пищевого продукта или согласно другому варианту реализации по меньшей мере на две части в процессе обработки пищевого продукта для получения информации относительно изменения его объема с течением времени.
[0077] Затем, информацию об объеме и/или профиль высоты выпечки принимает измерительный блок, который анализирует результаты обнаружения, переданные светообнаруживающими блоками, которые определяют отражение лазерных лучей от выпечки. Могут быть использованы одиночный светообнаруживающий блок или несколько светообнаруживающих блоков для всех лазерных лучей или один светообнаруживающий блок для каждого лазерного луча.
[0078] Согласно другому варианту реализации, по меньшей мере одна дополнительная измерительная система 852 может быть размещена в различных местоположениях внутри или снаружи машины для тепловой обработки. Согласно другому варианту реализации, измерительная система 850 может быть применена в положении, в котором ленточный транспортер дважды проходит мимо пищевого продукта в разные временные моменты обработки. Согласно другому варианту реализации измерительная система 850 может совершать перемещение с той же самой скоростью, что и ленточный транспортер 815.
[0079] Согласно другим вариантам реализации, могут быть использованы два и большее количество датчиков-видеокамер или оптических датчиков, а также два и большее количество лазерных генераторов линии для лазерной триангуляции.
[0080] Согласно варианту реализации, показанному на фиг. 9, контролирующая система 900 содержит по меньшей мере два контролирующих устройства, каждое из которых снабжено генератором 955 лазерных линий и светопринимающим устройством 960, таким как, например, видеокамера или матрица фотодиодов. Таким образом, блок для распределения лазерного излучения согласно данному варианту реализации содержит первый блок для создания лазерного излучения и второй блок для создания лазерного излучения.
[0081] От генераторов 955 лазерного излучения лазерные лучи 956 направлены к пищевому продукту 980, такому как, например, сырое тесто или тесто перед выпеканием, на ленточном транспортере 915. От пищевого продукта 980 лазерные лучи отражаются к светопринимающим устройствам 960. Поскольку положение генераторов 955 лазерного излучения и светопринимающих устройств 960 относительно друг друга и относительно ленточного транспортера 915 является известным, расстояние от генераторов 955 до пищевого продукта 980 может быть получено триангуляцией из точного положения, в котором лазерные лучи 956 наблюдаются в светопринимающих устройствах 960. Следовательно, поверхностный профиль обработанного пищевого продукта 980 может быть определен путем использования такой лазерной триангуляции.
[0082] Как показано на фиг. 9, лазерные лучи 956 направлены непосредственно к пищевому продукту или выпечке 980 и рассеяны непосредственно в направлении к светопринимающим устройствам или светообнаруживающим блокам 960. Согласно другому варианту реализации пути лазерных лучей могут быть изменены отклоняющими или направляющими зеркалами. Кроме того, генераторы 955 лазерного излучения или светообнаруживающие блоки 960 также могут быть расположены за пределами камеры для тепловой обработки или выпекающего блока. Такой подход обеспечивает более гибкую конструкцию контролирующей системы для контроля тепловой обработки. Кроме того, для препятствования запотеванию зеркала могут быть нагреты до достаточно высокой температуры для предотвращения запотевания, но достаточно низкой, чтобы не повредить зеркала.
[0083] Как показано на фиг. 9, лазерные лучи 956 от генераторов 955 лазерного излучения сфокусированы таким образом, что пищевой продукт 980 контролируется на различных ступенях изготовления. Следует отметить, что несмотря на то, что на фиг. 9 показано, что генераторы 955 лазерного излучения сфокусированы на двух соседних частях пищевого продукта 980, они точно также могут фокусироваться на частях пищевого продукта 980, которые расположены на большом расстоянии друг от друга. Например, две части пищевого продукта могут быть разделены несколькими метрами, или генераторы 955 лазерного излучения могут быть расположены на входе и выходе пекарной камеры, сквозь которую проходит ленточный транспортер 915, и могут наблюдать поверхностный профиль пищевого продукта 980 во время входа и выхода пекарной камеры. С этой целью генераторы лазерного излучения или генерирующие блоки 955 также могут быть расположены таким образом, что они излучают свет, падающий сверху почти перпендикулярно на пищевой продукт 980.
[0084] Также следует отметить, что генераторы 955 лазерных линий не обязательно должны быть расположены над ленточным транспортером 915, но также могут быть расположены сбоку ленточного транспортера 915. Разумеется по меньшей мере два генератора 955 лазерных линий также могут быть расположены с разных сторон ленточного транспортера 915.
[0085] Следовательно, при использовании двух или большего количества генераторов 955 лазерного излучения, которые сфокусированы на различных частях пищевого продукта 980 и наблюдают соответствующую поверхностную структуру частей пищевого продукта 980, различие в указанной поверхностной структуре, вызванное процессом выпекания или приготовления пищевого продукта, может наблюдаться, когда ленточный транспортер или перемещающий блок 915 перемещает пищевой продукт 980 через выпекающий блок от фокуса первого лазерного луча к фокусу второго лазерного луча. Эта информация о различии в поверхностной структуре на различных этапах процесса выпекания или изготовления пищевого продукта может быть использована для автоматического управления процессом и, следовательно, обеспечивает возможность автоматизированного выпекания или изготовления пищевого продукта.
[0086] Лазерные лучи 956 могут быть подобны точке или могут быть веерообразными и охватывать всю ширину ленты ленточного транспортера 915. При использовании веерообразных лазерных лучей 956 может быть получен объемный профиль пищевого продукта 980, перемещаемого ленточным транспортером 915, что может способствовать усовершенствованию автоматического управления процессом выпекания или изготовления пищевого продукта. Затем, отражение веерообразных лазерных лучей от пищевого продукта может быть коллимировано или концентрировано линзами, расположенными в светообнаруживающих блоках 960, для создания малогабаритных светообнаруживающих блоков 960, которые могут быть легко интегрированы в контролирующую систему для контроля тепловой обработки.
[0087] Как показано на фиг. 10, в дополнение к наблюдению за различными частями пищевого продукта, особенно предпочтительным является наблюдение посредством по меньшей мере двух измерительных систем в контролирующей системе 1000 за одной частью пищевых объектов 1080 под углом 45° в направлениях сверху слева и сверху справа. Это является предпочтительным, так как если наблюдаются круглые объекты, генераторы 1055 лазерного излучения и соответственно совмещенные с ними светопринимающие устройства 1060 могут измерять поверхностную структуру круглых объектов в областях, которые могут выглядеть затененными, если используется только один датчик, показывающий вид сверху. Согласно другому варианту реализации лазерные лучи могут иметь наклон даже меньше 45° относительно транспортерной ленты или лотка, который поддерживает пищевой продукт 1080. В результате чего поверхностная структура вблизи подложки для пищевого продукта может наблюдаться с улучшенным качеством.
[0088] В случае использования веерообразных лазерных лучей наклон плоскостей, заполненных веерообразными лучами, должен быть меньше 45° относительно подложки для пищевого продукта 1080. Это также означает, что угол между лазерными лучами должен быть больше 90°.
[0089] Следует отметить, что несмотря на то, что на фиг. 10 показано, что генераторы 1055 лазерного излучения сфокусированы на одной и той же части пищевого продукта 1080, они точно также могут быть сфокусированы на двух различных частях пищевого продукта 1080, которые разнесены друг от друга. Например, две части пищевого продукта могут быть разнесены на несколько метров, или генераторы 1055 лазерного излучения могут быть расположены на входе и выходе пекарной камеры, через которую проходит ленточный транспортер, и светопринимающие устройства могут наблюдать поверхностный профиль пищевого продукта 1080 во время его входа в пекарную камеру и выхода из пекарной камеры.
[0090] Также следует заметить, что генераторы 1055 лазерных линий не обязательно должны быть расположены над ленточным транспортером, но также могут быть расположены сбоку ленточного транспортера. Разумеется, генераторы 1055 лазерных линий также могут быть расположены по разные стороны ленточного транспортера.
[0091] Кроме того, согласно другому варианту реализации может быть использовано лазерное триангуляционное отображение внутри печи. Кроме того, могут быть использованы по меньшей мере два датчика для лазерной триангуляции и два генератора лазерных линий, направленные на выпекаемые продукты под углом приблизительно 45° (сверху слева и сверху справа). Это дает преимущество, состоящее в возможности измерения также и округленных испеченных продуктов с нижней стороны, в то время как при использовании одного генератора лазерных линий и одной видеокамеры, показывающей вид сверху, нижняя половина закругления является затененной и не будет учтена в результатах измерений.
[0092] Следовательно, согласно вышеуказанным вариантам реализации может быть обеспечена дополнительная информация о процессе выпекания или приготовления пищевого продукта, на основании которой может быть осуществлено более эффективное и надежное автоматизированное выпекание или приготовление пищевого продукта.
[0093] Согласно другому варианту реализации генератор лазерных линий или любой другой источник света и датчик-видеокамера, или любой другой оптический датчик могут быть использованы для захвата информации об обрабатываемом пищевом продукте. С использованием описанной выше процедуры, также известной как лазерная триангуляция, лазерная линия может быть спроецирована на объект измерения. Оптический датчик, матрица датчиков или обычная видеокамера могут быть направлены на этот объект измерения. Если перспектива видеокамеры или точка наблюдения и соответствующая плоскость и плоскость генератора лазерных линий, формируемая источником света и концами проецируемой лазерной линии, не параллельны или проходят под углом, обнаруженная оптическая информация может быть использована для выполнения измерений, предоставляющих информацию о размере и формах, включая трехмерную структуру или объем.
[0094] В вариантах реализации, описанных выше, два генерирующих лазерное излучение блока используются для генерирования и направления лазерных лучей. Согласно другому варианту реализации основной генерирующий лазерное излучение блок может быть использован для генерирования основного лазерного луча, который затем может быть распределен оптическим блоком внутри выпекающего блока. Использование такой структуры в контролирующей системе для контроля тепловой обработки позволяет уменьшить затраты энергии и пространство за счет уменьшения количества генерирующих лазерное излучение блоков.
[0095] Кроме того, генерирующий лазерное излучение блок может быть расположен за пределами выпекающего блока, и только основной лазерный луч может входить в выпекающий блок. Это обеспечивает возможность более гибкого выбора конструкции контролирующей системы для контроля тепловой обработки, особенно если светообнаруживающие блоки также расположены за пределами выпекающего блока.
[0096] Оптический блок может быть оптической системой любого типа, которая обеспечивает разделение одиночного основного лазерного луча на два или большее количество лазерных лучей. Например, оптическая система может содержать полупрозрачное зеркало, которое отражает часть основного лазерного луча в направлении к первому местоположению, которое должно наблюдаться, и передает часть основного лазерного луча к зеркалу, которое отражает свет в направлении к второму интересующему местоположению. Основной лазерный луч также может быть разделен таким образом, что его части непосредственно направлены к интересующим местоположениям для наблюдения. Согласно другому варианту реализации на световом пути основного лазерного луча также могут быть установлены большее количество зеркал и/или линз.
[0097] Согласно другому варианту реализации оптический блок может содержать выполненное с возможностью перемещения и вращения зеркало, которое поочередно генерирует лазерные лучи. С этой целью выполненное с возможностью перемещения и вращения зеркало может быть размещено над пищевым продуктом или выпечкой и может перемещаться и вращаться таким образом, что основной лазерный луч направлен к различным частям пищевого продукта или различным местам на одиночной части пищевого продукта в разные моменты времени. Следовательно, информация об объеме, собранная измерительным блоком, может быть отнесена к различным местоположениям внутри выпекающего блока в соответствии с временем.
[0098] Использование таких зеркал смягчает требования к их размещению внутри выпекающего блока и обеспечивает гибкую конструкцию контролирующей системы для контроля тепловой обработки. Кроме того, пользователь легко может переключать работу между режимом, при котором для получения информации об изменении профиля высоты и/или профиля объема пищевого продукта наблюдаются две различные части пищевого продукта, и режимом, при котором для получения информации об общей объемной форме части пищевого продукта, а также части пищевого продукта вблизи подложки, одиночная часть пищевого продукта наблюдается с различных направлений. Выполненное с возможностью перемещения и вращения зеркало также может выполнять указанные различные задачи параллельно.
[0099] Также разумеется, что зеркала, используемые в соединении с основным лазерным лучом, могут быть нагреты для препятствования из запотеванию.
[00100] Согласно другому варианту реализации оптическая система, составленная блоком для распределения лазерного излучения, пищевым продуктом или выпечкой и светообнаруживающим блоком, удовлетворяет принципу Шаймпфлюга. Этот принцип гарантирует, что изображение выпечки, охваченное лазерными лучами, всегда фокусируется на светообнаруживающем блоке и, таким образом, обеспечивает возможность точного измерения профиля высоты выпечки.
[00101] Согласно другому варианту реализации лазерная триангуляция может быть объединена с обработкой изображения в градациях серого для одновременного сбора информации о форме и размере, а также информации о структуре, цветах и других оптических признаках. Результирующая обработка данных может быть использована для генерирования уникальных признаков объекта измерения, в данном случае пищевого продукта. Эти признаки могут быть формой, размером, объемом, цветом, потемнением, структурой, размером пор и плотностью обрабатываемого пищевого продукта, такого как тесто или испеченный хлеб, который может быть нарезан. Некоторая или вся указанная информация может быть использована для интерпретации измерительных данных для обеспечения автоматизированного выпекания или приготовления пищевых продуктов.
[00102] В вариантах реализации, описанных выше, захват данных в основном выполняется датчиками изображений, такими как видеокамеры или матрицы фотодиодов. Однако согласно дополнительным вариантам реализации данные, полученные датчиками изображений, могут быть объединены с данными, полученными от множества других датчиков, таких как, например, гигрометры, датчики температуры загрузки, датчики температуры обрабатывающей камеры, акустические датчики, лазер, весы и таймеры. Кроме того, в качестве датчиков для измерительного блока 1810, как описано ниже, также могут быть использованы анализатор газа в обрабатывающей камере, средства для определения температурных профилей датчиков температуры загрузки, средства для определения электромагнитной или акустической эмиссии от подлежащего обработке пищевого продукта, такой как свет или звук, отраженные или излученные в ответ на излучение световых или акустических источников, средства для определения результатов объемных измерений подлежащего нагреву пищевого продукта, включая объемные, стерео или отражательные системы видеокамер, средства для определения типа, или строения, или рисунка, или оптических характеристик, или объема, или массы подлежащего обработке пищевого продукта. Затем, на основании всех данных, полученных от всех датчиков, можно управлять автоматизированным приготовлением или выпеканием пищевых продуктов.
[00103] Например, как показано на фиг. 7, обрабатывающая камера 720 может быть дополнительно оборудована по меньшей мере одним датчиком температуры или термометром 762. Несмотря на то, что на фиг. 7 он показан только внутри, любые другие описанные в настоящей заявке варианты реализации также могут содержать такой датчик 762 температуры. При тепловой обработке пищевого продукта информацию о температуре используют для выбора параметров процесса. Эти параметры могут содержать информацию, направленную на повышение нагрева с течением времени и распределение тепла в обрабатывающей камере. Они также могут включать информацию о состоянии печи, состоянии системы тепловой обработки и дополнительного предварительного подогрева.
[00104] Также может быть предпочтительным встраивание термометров, измеряющих температуру загрузки. Термометры загрузки обеспечивают возможность сбора информации о внутренней температуре пищевого продукта, которая является важной для определения состояния процесса приготовления пищевых продуктов. В хлебопечении предпочтительным является получение информации, относящейся к температуре внутренней части и мякиша.
[00105] Кроме того, изменение цвета подлежащего нагреву продукта во время нагревания может быть использовано для определения фактической температуры внутри камеры печи и дополнительно может быть использовано для соответствующего терморегулирования в процессе выпекания. Обрабатывающая камера 720 или любой другой описанный в настоящей заявке вариант реализации могут быть оборудованы по меньшей мере одним датчиком, измеряющим влажность в обрабатывающей камере, таким как гигрометр 764. В частности, в хлебопечении предпочтительным является сбор информации, относящейся к влажности. При нагревании содержащаяся в тесте вода испаряется, в результате чего возникает различие влажности внутри обрабатывающей камеры. Например, за счет циркуляции воздуха влажность в обрабатывающей камере во время процесса выпекания сначала увеличивается и затем уменьшается, что указывает на состояние обработки пищевого продукта.
[00106] Обрабатывающая камера 720 или любой другой описанный в настоящей заявке вариант реализации могут быть дополнительно оборудованы по меньшей мере одним датчиком, собирающим информацию о весе загруженного пищевого продукта и, в конечном счете, о его распределении. Это может быть достигнуто путем использования весов 766, встроенных в систему лотков камеры 720 для тепловой обработки. Лотковый узел или стеллажный узел могут поддерживаться вращающимися колесами или дисками, облегчающими загрузку печи. Весы 766 могут быть интегрированы с колесами или дисками и могут использовать их в качестве преобразователя. Предпочтительно выборочное получение информации о весе каждого используемого лотка или набора лотков для получения информации об общем весе пищевого продукта и относительном распределении общего веса, поскольку необходимый источник энергии и его направление во время тепловой обработки могут изменяться в значительной степени. Кроме того, предпочтительным является получение информации об изменении веса пищевого продукта с течением времени при его тепловой обработке. Например, в хлебопечении тесто теряет приблизительно 10% своего первоначального веса. Кроме того, может быть предпочтительным получение информации относительно состояния теста или пищевого продукта путем излучения и приема акустических сигналов, например, посредством динамического громкоговорителя и микрофона 768.
[00107] Кроме того, в описанных выше вариантах реализации могут быть использованы дополнительные видеокамеры, датчики изображений или матрицы фотодиодных датчиков и, в конечном счете, дополнительные осветительные устройства. Вместо размещения видеокамеры за окном в любой стенке обрабатывающей камеры, указанная или вторая видеокамеры также могут быть встроены в дверцу печи или отверстия обрабатывающей камеры.
[00108] Вместо встраивания осветительного устройства в любую стенку обрабатывающей камеры, оно также может быть встроено в дверцу печи или отверстия обрабатывающей камеры. Обычно дверца печи имеет окно для предоставления оператору возможности визуального наблюдения за обрабатываемым пищевым продуктом и управления процессом. Согласно другому варианту реализации по меньшей мере одна видеокамера или датчик изображений, или матрица фотодиодов или любое другое устройство для получения изображения могут быть встроены в дверцу печи или отверстия обрабатывающей камеры. Дверца печи, сконструированная без окна для наблюдения оператором, может обеспечить пониженное энергопотребление за счет улучшенной теплоизоляции. Кроме того, различия в наружном освещении не влияют на полученные посредством контролирующей видеокамеры изображения обрабатывающей камеры, которые в этом случае зависят только от собственного заданного освещения обрабатывающей камеры. Однако следует отметить, что такая система не может быть легко установлена впоследствии в уже существующую печь.
[00109] Кроме того, может быть предпочтительным встраивание экрана или цифрового визуального индикатора во наружную стенку дверцы печи или любое другое место снаружи обрабатывающей камеры. Указанный экран может показывать изображения, захваченные контролирующей видеокамерой в обрабатывающей камере. Такой подход предоставляет оператору возможность визуального наблюдения за процессом выпекания, несмотря на то, что задача настоящего изобретения состоит именно в том, чтобы сделать такое наблюдение ненужным.
[00110] Кроме того, может быть предпочтительным использование лотков или пакетов лотков, которые указывают распределение пищевого продукта. Например, в хлебопечении при загрузке печи размещение теста может быть различным для каждого цикла выпекания. Эти различия могут быть устранены путем обработки изображения с использованием способов согласования и распознавания. Одинаковая загрузка или размещение пищевого продукта является предпочтительным для каждого цикла изготовления, как показано на фиг. 11. При установке лотков 1100 может быть использована автоматизированная система для размещения. В случае ручного размещения по меньшей мере некоторые из используемых лотков могут иметь указатель 1110 места, в котором необходимо разместить тесто. В качестве указателя могут быть использованы выпуклости, углубления, поддоны, формы для выпечки, пиктограммы с пищевым продуктом, рисунки с пищевым продуктом или линии.
[00111] Кроме того, при встраивании датчика-видеокамеры в среду печи или систему для обработки пищевого продукта может быть предпочтительным встраивание охлаждающих устройств. Эти устройства могут представлять собой по меньшей мере одну теплоотводящую пластину, по меньшей мере один вентилятор и/или по меньшей мере одну водяную охлаждающую систему.
[00112] Кроме того, может быть использован ставень, который открывает только датчик-видеокамеру, когда в этом есть необходимость. Также имеется возможность выполнения множества снимков, но это не является обязательным, и часто бывает достаточным получать снимки только каждые 5 секунд или реже. Если ставень открывается только каждые 5 секунд, воздействие тепла на чип видеокамеры значительно слабее, в результате чего снижена возможность ошибки по причине теплового воздействия и, таким образом, повышена надежность контролирующей системы для контроля тепловой обработки.
[00113] Дополнительным преимуществом может быть выполнение по меньшей мере двух или большего количества снимков или взятие одной экспозиции с несколькими неразрушающими считываниями и суммирование их пиксельных значений. Для суммирования могут быть использованы средние значения, или может быть вычислена одна картину по меньшей мере из двух посредством генерации изображения в большом динамическом диапазоне. В комбинации с затворной фотокамерой или независимыми фотокамерами могут быть применены фильтры с конкретной длиной волны, которые пропускают свет только в соответствующем диапазоне, например видимое световое или инфракрасное излучение. Такой подход дополнительно уменьшает тепловое воздействие на чип фотокамеры и, следовательно, дополнительно улучшает надежность контролирующей системы.
[00114] Согласно другому варианту реализации, показанному на фиг. 12, может быть использована интеграция измерительной системы в стеллажи или подвижные тележки, используемые в некоторых конструкциях печи. В случае вращающихся стеллажных печей измерительная система может быть встроена в стеллаж печи, обозначенный на чертеже позиционным номером 1200. Измерительная система встроена по меньшей мере над одним из несущих пищевой продукт лотков. Измерительная система, встроенная в тележку, может иметь по меньшей мере один датчик из следующего: гигрометр, датчик температуры загрузки, датчик температуры обрабатывающей камеры, акустические датчики, весы, таймер, видеокамера, датчик изображений, матрица фотодиодов. Часть системы со встроенными в стеллаж датчиками также поддерживает устройства, такие как осветительное или охлаждающее устройства, как показано на чертежах в настоящем изобретении. Дополнительной задачей настоящего изобретения является электрическое соединение, такое как проводное соединение или соединение посредством электрических соединителей 1210 во время установки стеллажа. Также предпочтительным является встраивание по меньшей мере части измерительной системы во вращающуюся стенку стеллажной печи, как обозначено позиционным номером 1220. Предпочтительным является уменьшение воздействия тепла на измерительную систему. Для видеокамеры, датчика изображений или матрицы фотодиодов предпочтительным является применение корректирующего вращающего или перемещающего изображение алгоритма для коррекции вращения стеллажа или перемещения пищевого продукта. Этот алгоритм может быть поддержан посредством измеренного или предварительно заданного параметра управления печью в соответствии со скоростью перемещения или вращения.
[00115] Согласно другому варианту реализации графический пользовательский интерфейс (GUI) может показывать изображения каждого лотка и яруса внутри печи. В печи с конвективным обогревом время окончания для каждого лотка может быть определено индивидуально. Это означает, что если один лоток закончен раньше чем другой, пользователь может подать сигнал для опоражнивания этого лотка с оставлением других лотков внутри печи. Это является предпочтительным, поскольку различные печи могут не обеспечивать одинаковые результаты выпекания для различных лотков. Кроме того, на каждом лотке могут выпекаться различные продукты, если для них рекомендована приблизительно одинаковая температура выпекания. Следовательно, такой подход обеспечивает возможность более гибкого и эффективного управления одиночной печью.
[00116] Согласно другому варианту реализации печь также может определять распределение хлебобулочных изделий на лотке. Печь также может отклонять недогруженные лотки.
[00117] Описанные выше данные о выпекании или процедуре обработки пищевого продукта могут быть собраны с использованием одного или нескольких датчиков. Для обеспечения эффективного и надежного автоматизированного выпекания или обработки пищевого продукта машины для тепловой обработки пищевого продукта, такие как печи или ленточные транспортеры, должны быть выполнены с обеспечением возможности: извлечения соответствующих данных из всех данных, классифицирования обработанной пищи и этапов обработки пищевого продукта на основании этих данных и автоматического управления обработкой на основании указанных данных и классификаций. Это может быть достигнуто с использованием контролирующей системы для контроля тепловой обработки, выполненной с возможностью управления процессом выпекания на основании способов машинного обучения.
[00118] На фиг. 13 показаны управляющий блок и схема обработки данных, согласно которой могут быть обработаны данные любого из вышеописанных вариантов реализации.
[00119] В настоящей заявке, управляющий блок или контролирующая система 1300 для машины 1310 для тепловой обработки распознает обработанный пищевой продукт с использованием любой из описанных измерительных систем. Распознавание обрабатываемого пищевого продукта может быть достигнуто с использованием уникальной матрицы Da входных измерительных данных. Эта матрица входных измерительных данных или ее уменьшенное представление может быть использована для идентификации процесса обработки пищевого продукта с использованием его характеристических данных или его индивидуальных данных.
[00120] Управляющий блок 1300 имеет доступ к базе данных, которая обеспечивает возможность сравнения матрицы входных измерительных данных с ранее сохраненной информацией 1301. Такой подход обеспечивает возможность выбора управляющим блоком 1300 управляющей программы или обрабатывающей процедуры для текущей обработки пищевого продукта. Часть этой процедуры согласно одному варианту реализации состоит в преобразовании Хс матрицы Da входных измерительных данных в матрицу Db управляющих данных для приводного устройства:

[00121] С использованием матрицы Db управляющих данных для приводного устройства машина 1310 для тепловой обработки управляет обработкой пищевого продукта, например путем управления управляющими параметрами печи, такими как источник энергии или время начала и окончания обработки. Кроме того, машина для тепловой обработки работает в режиме управления с обратной связью. Обычно, матрица Da входных измерительных данных значительно больше по размеру по сравнению с матрицей Db управляющих данных для приводного устройства.
[00122] Согласно одному варианту реализации предпочтительным является определение результата преобразования Хс, а также уменьшенного представления матрицы Da входных измерительных данных способами, известными из области машинного обучения. Это объясняется тем, что тип обрабатываемого пищевого продукта и соответствующие процедуры обычно имеют индивидуальные различия.
[00123] С точки зрения обработки данных, соотношения между входными измерительными данными и соответствующими выходными данными приводного устройства могут быть крайне нелинейными и иметь временную зависимость. В настоящее время эти параметры обычно выбирает человек-оператор, обычно хорошо ориентирующийся в трудоемкой конфигурации машины для тепловой обработки. Согласно одному варианту реализации настоящего изобретения, с использованием первоначальных наборов данных, полученных от оператора, способы машинного обучения могут формировать конфигурацию будущей системы и могут уменьшать время настройки, а также могут увеличивать эффективность и качество обработки.
[00124] Все примененные данные могут храниться в базах данных. Согласно настоящему изобретению предпочтительным является соединение машины для тепловой обработки с сетью. Посредством сети может быть осуществлен обмен любой информацией, находящейся в базе данных. Такой подход предоставляет оператору возможность взаимодействия с несколькими локально распределенными машинами для тепловой обработки. Для достижения этого машина для тепловой обработки содержит оборудование, необходимое для взаимодействия с сетью и использования некоторых протоколов, таких как протокол управления передачей данных (TCP) и интернет-протокол (IP). Согласно настоящему изобретению машина для тепловой обработки может быть оборудована сетевыми устройствами для связи посредством локальной сети (ЛВС), беспроводной локальной сети (WLAN) или сети с доступом к подвижным объектам, используемой в мобильной связи.
[00125] В любом описанном выше варианте реализации процедура выпекания или обработки пищевого продукта может содержать стадию обучения и производственную стадию. На стадии обучения человек-оператор вводит пищевой продукт в машину для тепловой обработки. Пищевой продукт обрабатывается нагреванием по желанию оператора. Эта стадия может быть выполнена с предварительным подогревом камеры для тепловой обработки и без него. После обработки теплом оператор может указать тип пищевого продукта и время достижения необходимого состояния процесса. Оператор также может предоставить информацию о том, когда продукт недодержан, когда передержан и когда находится в необходимом состоянии готовности.
[00126] С использованием описанных способов машинного обучения машина вычисляет параметры обработки для изготовления будущего пищевого продукта. Затем, машина для тепловой обработки или машины для тепловой обработки, соединенные с сетью, могут быть использованы для прохождения дополнительных стадий обучения или могут быть переведены в режим автоматизированного изготовления. В режиме автоматизированного изготовления оператор только загружает пищевой продукт в машину для тепловой обработки с дополнительным предварительным подогревом. После загрузки машина обнаруживает пищевой продукт в обрабатывающей камере и выполняет предварительно усвоенную процедуру тепловой обработки.
[00127] При достижении желаемого состояния процесса обработки пищевого продукта или просто когда хлеб готов, машина завершает процесс тепловой обработки. Это может быть осуществлено путем открывания дверцы или выключением источника энергии, или выпуском горячего воздуха из обрабатывающей камеры. При этом также может быть передан оператору визуальный или акустический сигнал. Кроме того, машина для тепловой обработки может запросить подтверждение у оператора. Она может предложить выбрать категорию продукта, такую как недопеченный, хороший или перепеченный продукт. Автоматизированная система загрузки, которая загружает и разгружает обрабатывающую камеру, может полностью автоматизировать процедуру. С этой целью могут использоваться роботизированная рука или конвекционный ленточный транспортер.
[00128] Недавно открытые способы машинного обучения и управления обработкой пищевого продукта были исследованы на предмет создания адаптивного контроля. Искусственные нейронные сети (ANN), метод опорных векторов (SVM) и нечеткая классификация ближайших k-соседей (KNN) были исследованы в той мере, в которой они применены к специальным приложениям для обработки пищевого продукта. Одна из задач настоящего изобретения состоит в оценке того, что может быть достигнуто машинным обучением без модели процесса, заданной оператором.
[00129] Ниже приведен краткий обзор теорий, лежащих в основе настоящего изобретения. Обзор охватывает способы уменьшения измерительных данных путем уменьшения размерности, такие как анализ главных компонент, линейный дискриминантный анализ и изометрическое преобразование признаков. Он также включает введение в классификацию, а также способы обучения с учителем и без учителя, такие как нечеткая классификация ближайших k-соседей, искусственные нейронные сети, метод опорных векторов и укрепляющее обучение. Для числового формата разделителем тысяч является запятая "," и десятичным разделителем является точка "."; таким образом, одна тысяча может быть представлена в виде: 1000.00.
ИЗВЛЕЧЕНИЕ ПРИЗНАКОВ И УМЕНЬШЕНИЕ РАЗМЕРНОСТИ
[00130] Настоящее изобретение не обеспечивает человекоподобного поведения машин и не стремится к этому. Однако исследование некоторых подобных познавательным способностям свойств интеллектуальных агентов, входящих в состав обрабатывающей или изготовляющей пищевой продукт машины, выполненных с возможностью управления задачами обработки пищевого продукта, может обеспечить прикладной сценарий для некоторых из самых сложных подходов к когнитивной архитектуре. Подходы для изготовляющих пищевой продукт машин могут быть структурированы в пределах когнитивной архитектуры контура "восприятие-действие", как показано на фиг. 14, которая также определяет познавательные технические системы. Познавательные способности, такие как восприятие, обучение и извлечение знания, обеспечивают возможность автономного взаимодействия машины со средой посредством датчиков и приводных устройств. Таким образом, ниже будут описаны некоторые способы, известные из машинного обучения, которые являются подходящими для различных частей когнитивного контура "восприятие-действие", работающего в производственной системе.
[00131] Если познавательная техническая система просто имеет представление признаков ее входных измерительных данных, она может быть в состоянии обрабатывать увеличенный объем данных. Кроме того, извлечение признаков подчеркивает или повышает отношение сигнал-шум за счет сосредоточения на более соответствующей информации из всего массива данных. Однако известны множество способов извлечения соответствующих признаков из массива данных, теоретические аспекты которого в итоге сводятся к следующему.
[00132] Для выбора или изучения признаков познавательным способом необходим способ, который может быть применен полностью автономно без потребности в наблюдении человеком. Один способ достичь этого состоит в уменьшении размерности (DR), когда набор X данных размером t×n преобразован в имеющий уменьшенную размерность набор Y данных размером t×p. В этом контексте Rn следует понимать как пространство наблюдения и Rp как пространство признаков. Идея состоит в том, чтобы идентифицировать или изучить многообразие с увеличенной размерностью в конкретном наборе данных путем создания представления многообразия с уменьшенной размерностью.
[00133] Способы, используемые, для поиска признаков в наборе данных, могут быть подразделены на две группы: линейные и нелинейные, как показано на фиг. 15. Линейные способы уменьшения размерности, по всей видимости, уступают нелинейным способам уменьшения размерности, если набор данных имеет нелинейную структуру. Это сопровождается тем недостатком, что нелинейные способы в целом имеют более длительное время исполнения, чем линейные способы. Кроме того, в отличие от нелинейных способов линейные способы обеспечивают возможность прямого метода преобразования назад и вперед. Вопрос в том, достаточен ли линейный способ уменьшения размерности для обработки пищевого продукта, или действительно ли нелинейные способы приносят больше преимуществ чем недостатков. Следующие нелинейные способы являются весьма предпочтительными для искусственных наборов данных: локальное линейное вложение (LLE) Гесса, метод карт собственных значений лапласиана, локально-линейное вложение (LLE), многослойное автокодирование (ANN Aut), анализ главных компонент на основе ядер (Kernel РСА), многомерное шкалирование (MDS), изометрическое преобразование признаков (Isomap) и другие.
[00134] В результате, изометрическое преобразование признаков (Isomap) оказалось одним из лучших испытанных алгоритмов для искусственных наборов данных. Было выяснено, что алгоритм Isomap оказался наиболее подходящим нелинейным способом уменьшения размерности для обработки пищевого продукта. Таким образом, ниже описаны алгоритм Isomap и два линейных способа уменьшения размерности.
АНАЛИЗ ГЛАВНЫХ КОМПОНЕНТ
[00135] Анализ главных компонент (РСА) обеспечивает возможность открытия признаков, которые разделяют набор данных по дисперсии. Такой подход позволяет идентифицировать независимый набор признаков, который представляет максимально возможную дисперсию набора данных, но с уменьшенной размерностью. Анализ главных компонент известен в других дисциплинах, таких как преобразование Карунена-Лоэва и, частично, в сингулярной декомпозиции (SVD), которая также является известным методом. Анализ главных компонент часто используется в статистическом распознавании образов или распознавании поверхности. В общих чертах, этот метод позволяет вычислять доминирующие собственные векторы и собственные значения ковариации набора данных. Необходимо найти содержащее t×p элементов представление Y средней скорректированной матрицы X с высокой размерностью, содержащей набор данных t×n и поддерживающей максимально возможную дисперсию, с декоррелированными колонками для вычисления представления Yi данных с низкой размерностью для набора Xi данных. Таким образом, анализ главных компонент позволяет найти линейное преобразование MPCA размера n×p, которое максимизирует выражение (MTPCAcov(X)MPCA), где MTPCAMPCA=Ip, и cov(Х) - ковариантная матрица X. Путем нахождения собственных значений с следующим способом:

получаем p-упорядоченные главные собственные значения с диагональной матрицей, заданной как ∧=diag(λ1, …, λр). Желаемая проекция, заданная как

дает необходимую проекцию на линейный базис MPCA. Можно показать, что собственные векторы или главные компоненты (PC), которые представляют дисперсию внутри представления данных с высокой размерностью, заданы как p первых колонок матрицы MPCA, отсортированных по дисперсии. Значение p определено анализом остаточной дисперсии, отражающей потерю информации из-за уменьшения размерности.
[00136] Анализ главных компонент позволяет уменьшить размерность данных путем нахождения ортогональной линейной комбинации переменных с наибольшей дисперсией. Анализ главных компонент представляет собой чрезвычайно мощный инструмент для анализа наборов данных. Однако он не всегда позволяет найти наилучшее представление с низкой размерностью, особенно, если исходный набор данных имеет нелинейную структуру.
ЛИНЕЙНЫЙ ДИСКРИМИНАНТНЫЙ АНАЛИЗ
[00137] Несмотря на полезность анализа главных компонент, линейный дискриминантный анализ (LDA) может быть использован в качестве способа уменьшения размерности под надзором "учителя". Он может быть классифицирован как линейный способ, поскольку в результате он также приводит к линейному преобразованию MLDA для набора данных X в матрицу Y с низкой размерностью, как установлено для MPCA в уравнении 2.4. Необходимость надзора "учителя" является недостатком, если основная цель состоит в создании полностью автономной системы. Однако, способ LDA облегчает понимание природы измерительных данных, поскольку он позволяет создавать признаки, которые представляют необходимый испытательный набор данных.
[00138] Поскольку подробности способа LDA и дискриминанта Фишера являются известными, ниже представлено только краткое упрощенное изложение. Может быть предположено, что имеются нулевые средние данные X. Процесс надзора (обучения с учителем) предоставляет информацию о классе для разделения данных X на С классов с нулевыми средними данными Хс для класса с. Это может быть вычислено как:

где Sw - разброс внутри класса, который представляет собой меру дисперсии класса с данными для его собственного среднего значения. Разброс Sb между классами может быть выражен как:

[00139] Разброс между классами представляет собой меру дисперсии каждого класса относительно средних значений других классов. Линейное преобразование MLDA может быть получено оптимизацией отношения разброса между классами к разбросу внутри-класса в низкоразмерном представлении с использованием критерия Фишера:

[00140] Максимизация критерия Фишера путем решения задачи нахождения собственных значений для отношения Sw-1Sb обеспечивает С-1 собственных значений, которые являются отличными от нуля. Таким образом, эта процедура позволяет найти оптимальные признаки для выделения указанных классов в подпространстве с линейными проекциями. Таким образом, способ LDA позволяет выделить низкоразмерное представление с максимизированным отношением дисперсии между классами к дисперсии внутри классов.
ИЗОМЕТРИЧЕСКОЕ ПРЕОБРАЗОВАНИЕ ПРИЗНАКОВ
[00141] Анализ главных компонент и способ LDA позволяют осуществить линейное преобразование набора данных с низкой размерностью в представление с низкой размерностью. Это может быть выражено как изучение многообразия в пространстве наблюдения и нахождение представления для него в пространстве признаков с низкой размерностью. Для наборов данных с нелинейной структурой, таких как искусственный искривленный набор данных, линейные проекции теряют нелинейный характер исходного многообразия. Линейные проекции не позволяют уменьшить размерность простым способом: точки данных в пространстве признаков могут казаться соседствующими, несмотря на то, что они не находятся в пространстве наблюдения. Для решения этой задачи недавно были предложены нелинейные способы уменьшения размерности, имеющие отношение к линейным способам. Однако "а приори" неясно, имеют ли нелинейные способы фактическое превосходство перед проверенными линейными способами, такими как анализ главных компонент и способ LDA, в обработке данных измерительных систем для приготовления пищевого продукта.
[00142] Алгоритм изометрического преобразования признаков (Isomap) пытается сохранить попарные геодезические или криволинейные расстояния между точками данных в пространстве наблюдения. В отличие от Евклидова расстояния, которое является обычным или прямым расстоянием между двумя точками и которое может быть измерено линейкой или вычислено с использованием теоремы Пифагора, геодезическое расстояние представляет собой расстояние между двумя точками, измеренное вдоль многообразия в пространстве наблюдения. Иными словами, берется не самый короткий путь, но используются соседние точки данных в качестве транспортных узлов для скачка между точками данных. Геодезическое расстояние между точками xi данных в пространстве наблюдения может быть вычислено путем построения графа N соседства точек, который соединяет точку данных с ее K ближайшими соседями в наборе X данных. Матрица попарных геодезических расстояний может быть построена с использованием алгоритма Дейкстры для поиска кратчайшего пути. Для уменьшения размерности и получения набора данных Y к матрице попарных геодезических расстояний может быть применено многомерное шкалирование (MDS). Способ MDS позволяет сохранять попарные расстояния между точками данных в максимально возможной степени. На первом этапе способа применяют функцию напряжения, такую как исходная функция напряжения, заданная как:

для получения меры для качества или ошибки между попарными расстояниями в пространстве признаков и пространстве наблюдения. Здесь,  - Евклидово расстояние между точками данных xi и xj в пространстве наблюдения, и то же самое справедливо для точек yi и yj для пространства признаков. Функция напряжения может быть минимизирована нахождением собственных значений матрицы попарных расстояний.
- Евклидово расстояние между точками данных xi и xj в пространстве наблюдения, и то же самое справедливо для точек yi и yj для пространства признаков. Функция напряжения может быть минимизирована нахождением собственных значений матрицы попарных расстояний.
[00143] Таким образом, алгоритм Isomap позволяет уменьшить размерность путем сохранения попарного геодезического расстояния между точками данных в максимально возможной степени.
КЛАССИФИКАЦИЯ ДЛЯ МАШИННОГО ОБУЧЕНИЯ
[00144] В машинном обучении это не только извлечение признаков, что само по себе представляет большой научный интерес, но также и необходимость принятия решений и оценки ситуаций. Способы классификации могут помочь машине выявлять различия между сложными ситуациями, такими как встречающиеся в обработке пищевых продуктов. Таким образом, классификаторы используют так называемые классы, которые сегментируют существующие данные. Представление об этих классах может быть получено из некоторого учебного набора данных. В происходящем в настоящее время исследовании искусственного интеллекта (AI) и познавательных машин используются искусственные нейронные сети, которые были разработаны относительно давно. Для сравнения, концепции ядерных машин и укрепляющего обучения появились только недавно, но показали повышенные познавательные способности.
ИСКУССТВЕННЫЕ НЕЙРОННЫЕ СЕТИ
[00145] Искусственные нейронные сети (ANN) интенсивно обсуждаются в течение многих десятилетий. Искусственные нейронные сети были одним из первых успехов в истории искусственного интеллекта. Путем использования человеческого мозга в качестве модели несколько искусственных нейронов соединены в сетевую топологию таким способом, при котором указанные искусственные нейронные сети могут обучаться аппроксимировать функции, такие как распознавание образов. Эта модель позволяет нейрону активировать свой выход, если достигнут или превышен некоторый порог. Это может быть смоделировано с использованием пороговой функции. Естественные нейроны, видимо, "срабатывают" с двойным порогом. Однако также может быть использована сигмоидальная функция:

где v - параметр перехода. Для каждого входного соединения определен настраиваемый весовой коэффициент wi, который позволяет искусственным нейронным сетям реализовать так называемую парадигму обучения. Пороговая функция о может быть выражена с использованием весовых коэффициентов W и выходов от предыдущих нейронов Р: о=WT⋅P в матрично-векторном выражении. Нейроны могут быть: многослойными в упреждающей структуре, многослойным перцептроном (MLP) или, например, с бесконечным входным откликом, достигнутым с использованием контуров обратной связи с элементом задержки в так называемых рекуррентных нейронных сетях. Многослойный перцептрон представляет собой сеть с механизмом прогнозирования событий, имеющая многослойную структуру; в случае необходимости могут быть добавлены несколько скрытых слоев для решения нелинейных задач. Многослойный перцептрон может быть использован с непрерывными пороговыми функциями, такими как сигмоидальная функция, для поддержки алгоритма обратного распространения, описанного ниже для обучения с учителем. Такой подход позволяет минимизировать ошибку Е:

текущего выхода ai назначенного выхода zi, где конкретные веса настроены рекурсивно. Для многослойного перцептрона с одним скрытым слоем, если hj - значения скрытого слоя, ei - входные значения, а≥0 - скорость обучения, и εi=zi-ai, то веса скрытого слоя w1ij и входного слоя w2ij настроены в соответствии с:

[00146] Слои перечислены от входного к выходному. Для обратного распространения весовые коэффициенты настроены для соответствующих векторов выхода, пока общая ошибка не может быть уменьшена далее. Наконец, для классификации С классов выходной слой может состоять или из С выходных нейронов, представляющих вероятность соответствующего класса, или из одиночного выходного нейрона, который имеет заданные диапазоны для каждого класса.
[00147] Таким образом, искусственные нейронные сети могут обучаться на учебном наборе данных или приспосабливаться к учебному набору данных и могут находить линейную или нелинейную функцию из N входных нейронов до С выходных нейронов. Это может быть использовано в классификации для дифференцирования набора классов в наборе данных.
ЯДЕРНЫЕ МАШИНЫ
[00148] В целом, способ классификации должен иметь целью определение вероятности изученных классов, встречающихся на основании измеренных данных. Классификация может быть математически сформулирована как набор классов ci=c1, …, cN в С, где набор данных представлен как  , и вероятность pi:
, и вероятность pi:

[00149] Затем, параметр θ может быть выбран отдельно для каждой классификации или может быть извлечен из учебного набора данных.
[00150] Для достижения обучения желательно облегчить эффективные алгоритмы обучения и представить сложные нелинейные функции. Ядерные машины или машины опорных векторов (SVM) могут помочь достижению обеих целей. Простое объяснение метода опорных векторов, или в данном конкретном контексте, классификации опорных векторов (SVC) состоит в следующем: для дифференцирования между двумя классами, хорошими и плохими, необходимо начертить линию и указать, что есть что; поскольку класс не может быть одновременно тем и другим, необходимо альтернативное решение: ci∈{-1,1}. Если можно найти только нелинейный разделитель для этих двух классов в низкоразмерном пространстве, то может быть найдено линейное представление для него в более высокоразмерном пространстве, гиперплоскости. Иными словами, если линейный разделитель невозможен в фактическом пространстве, увеличение размерности обеспечивает возможность линейного разделения. Например, можно отобразить посредством функции F двумерное пространство f1=x1, f2=x2 с круговым разделителем в трехмерное пространство  используя линейный разделитель, как показано на фиг. 16.
используя линейный разделитель, как показано на фиг. 16.
[00151] В этом случае классификация опорных векторов позволяет найти оптимальный линейный разделитель, гиперплоскость:

в соответствующем высокоразмерном пространстве для набора классов ci. В трехмерном пространстве они могут быть разделены гиперплоскостью Н, где о - нормальный вектор гиперплоскости Н, перпендикулярное расстояние до гиперплоскости |b|/||o||, и о - Эвклидова норма ||o|| - Для нахождения гиперплоскости, которая служит оптимальным линейным разделителем, классификация опорных векторов максимизирует зазор, заданный как:

между гиперплоскостью и ближайшими точками xi данных. Это может быть достигнуто минимизацией отношения ||o||2/2 и решением с оптимальным параметром множителя Лагранжа αi. Для этого выражение

должно быть максимизировано при ограничениях αi≥0 и Σiαici=0. Оптимальный линейный разделитель для несмещенной гиперплоскости может быть задан с использованием выражения

разрешающего классификацию с двумя классами.
[00152] Метод SVM имеет два важных свойства: он эффективен в отношении вычислительного времени и может быть показан уравнениями 2.16 и 2.17. Во-первых, так называемые опорные векторы или набор параметров αi, относящихся к каждой точке данных, являются нулевыми, за исключением точек, наиближайших к разделителю. Эффективное количество параметров, задающих гиперплоскость, обычно намного меньше чем l, что повышает вычислительные характеристики. Во-вторых, данные входят в выражение 2.16 только в форме скалярных произведений пар точек. Такой подход обеспечивает возможность применения так называемого ядерного "трюка":

который часто обеспечивает возможность вычисления F(xi)⋅F(xj) без потребности в точном знании F. Ядерная функция K(xi, xj) обеспечивает возможность вычисления скалярного произведения пар входных данных непосредственно в соответствующем пространстве признаков. Однако, эта ядерная функция, примененная ко всему настоящему изобретению, является Гауссовой радиальной базисной функцией и требует выполнения некоторых условий, таких как:

где γ - настраиваемый ядерный параметр.
[00153] Поскольку выше обсуждались только двоичные решения между двумя классами, следует отметить, что также может быть обеспечена возможность мягких решений и решения для множества классов. Последнее может быть достигнуто на этапах попарным соединением каждого класса ci в сопоставлении с оставшимися n-1 классами.
[00154] Таким образом, классификация опорных векторов может быть использована для изучения сложных данных. Она заблаговременно структурирует эти данные в набор классов. Преобразование в высокоразмерное пространство и обнаружение оптимального линейного разделителя позволяет машине SVM использовать эффективные вычислительные способы, такие как опорные векторы и ядерный "трюк".
НЕЧЕТКИЙ МЕТОД K-БЛИЖАЙШИХ СОСЕДЕЙ
[00155] В отличие от описанных выше машин опорного вектора, менее сложный, но высоко эффективный алгоритм, называемый классификатором нечеткого метода k-ближайших соседей (KNN), также может разделять классы внутри набора данных. Этот алгоритм позволяет категоризировать неизвестные данные путем вычисления расстояния до набора ближайших соседей.
[00156] Может быть предположено, что имеется набор n маркированных выборок с членством в известной группе классов. Если прибывает новая выборка х, возможно вычисление вероятности pi(х) членства для некоторого класса с векторным расстоянием до элементов существующих классов. Если вероятность членства в классе А составляет 90% по сравнению с классом В с вероятностью 6% и C с вероятностью только 4%, наилучшие результаты являются очевидными. Напротив, если вероятность членства в классе А составляет 45% и вероятность членства в классе В составляет 43%, наилучшие результаты не являются очевидными. Таким образом, метод KNN предоставляет информацию о членстве как функцию k-ближайших соседей и их членства в возможных классах. В итоге, это может быть сведено к:

где pij - вероятность членства в i-ом классе j-го вектора внутри набора маркированных выборок. Переменная m - вес для расстояния и его влияние во вкладе в расчетное значение членства.
[00157] При применении часто задают m=2 и количество ближайших соседей K=20.
УКРЕПЛЯЮЩЕЕ ОБУЧЕНИЕ
[00158] В отличие от предыдущих способов обучения, которые извлекают функции или модели вероятности из обучающих данных, укрепляющее обучение (RL) может облегчать обучение путем использования обратной связи окружающей среды в результате собственных действий агента в течение длительного срока без потребности в учителе. Это влечет за собой различие между обучением с учителем и обучением без учителя. Если преследуется долговременная цель, положительная обратная связь окружающей среды, также известная как награда или подкрепление, может поддерживать совершенствование. Агент может обучиться из наград, как оптимизировать свою политику или стратегию взаимодействия с реальным миром, причем наилучшей политикой является та, которая оптимизирует ожидаемую суммарную награду. Укрепляющее обучение не требует предварительно законченной модели среды, ни функции общей награды. Искусственные агенты, таким образом, демонстрируют познавательную способность и действуют подобно животным, которые могут обучаться на основании отрицательных результатов, подобных ощущениям боли и голода, и положительных результатов (наград), подобных ощущениям удовольствия и еды. В данном случае, может быть выбран вариант, согласно которому агент использует подход, основанный на функции значения, согласно которому он стремится максимизировать свой доход от окружающей среды.
[00159] В укрепляющем обучении агент предпринимает действия at в среде, которую он воспринимает как свое текущее состояние st, для максимизации долговременных выгод rt путем усвоения некоторой политики п. Однако прежде, чем может быть начато обучение с подкреплением, необходимо найти ответы относительно соответствующего плана агента. Агент может пытаться максимизировать ожидаемый доход путем оценки дохода для данной политики п. Такое поведение агента также упоминается как оценка функции значения. Агент может оценивать действие путем оценки значения состояния с использованием функции значения состояния Vn(s), рассматривая некоторую политику пw, которая является непрерывно дифференцируемой как:

[00160] С использованием этой функции агент может оценивать ожидаемый доход для данного состояния и следующей политики. Он также может оценивать ожидаемый доход для действия, совершенного после данного состояния и политики. Таким образом, агент выбирает действие, выводя данное состояние из функции "состояние-действие" или Q-функции, такой как:

[00161] Таким образом, следующее действие основано на функции rt награды, и чтобы предоставить агенту концессию на ожидаемые будущие награды сверх текущих наград, может быть выбран дисконт-фактор 0≤γ≤1. Может быть задана компенсация агенту за ожидание будущих наград, например, будущих наград, которые являются незначительными для γ=0.
[00162] В укрепляющем обучении способы могут быть подразделены на группы, такие как способы, основанные на функции значения, или прямой поиск политики. Множество различных алгоритмов типа "актер-критик" представляют собой способы, основанные на функции значения, позволяющие оценивать и оптимизировать ожидаемый доход для политики. Для реализации способа, основанного на функции значения, поведение для искусственного агента и основной управляющей задачи может быть установлено в форме марковского процесса принятия решения (MDP). Система воспринимает свою среду в непрерывном множестве состояний, где  , и so - начальное состояние. Она может выбрать из набора возможных действий
, и so - начальное состояние. Она может выбрать из набора возможных действий  в отношении стохастической и параметризованной политики, определенной как п(at|st)=p(at|st,wt), с параметрами политики
в отношении стохастической и параметризованной политики, определенной как п(at|st)=p(at|st,wt), с параметрами политики  . После изучения политика может быть преобразована из состояний в действия с учетом ожидаемых наград
. После изучения политика может быть преобразована из состояний в действия с учетом ожидаемых наград  . Награда после каждого действия основана на rt(st,at). Если модели окружающей среды являются недоступными, то способы типа "актер-критик" теоретически могут обеспечить возможность разработки алгоритмов поиска политики. Название перешло из театральной среды, в которой актер приспосабливает свои действия в ответ на обратную связь от критика. Это может быть достигнуто с использованием заданной функции оценки в качестве взвешенной функции набора признаков или так называемой базисной функции φ(s), который затем приводит к аппроксимации функции типа "состояние-значение" с параметрами v функции значения:
. Награда после каждого действия основана на rt(st,at). Если модели окружающей среды являются недоступными, то способы типа "актер-критик" теоретически могут обеспечить возможность разработки алгоритмов поиска политики. Название перешло из театральной среды, в которой актер приспосабливает свои действия в ответ на обратную связь от критика. Это может быть достигнуто с использованием заданной функции оценки в качестве взвешенной функции набора признаков или так называемой базисной функции φ(s), который затем приводит к аппроксимации функции типа "состояние-значение" с параметрами v функции значения:

[00163] Улучшение политики является проблемой оптимизации, которая может быть решена с использованием градиента политики. Выбор способа градиента политики важен для сходимости и эффективности. Алгоритм "естественный актер-критик" (NAC), по всей видимости, отвечает обоим факторам, как описано в работе J. Peters и S. Schaal, "Естественный актер-критик", Neurocomputing, том 71, №7-9, стр. 1180-1190, 2008 г., в которой актер совершенствуется, используя производную g политики критика, как показано в уравнении 2.24:

[00164] Затем, вычисляют этапы усовершенствования параметров политики алгоритма NAC с использованием:

где α - скорость обучения, и  - естественный градиент, вычисленный с использованием метрики Фишера или полученный из политики, как описано в вышеуказанной публикации об алгоритме NAC. Алгоритм NAC с LSTD-Q полностью представлен в таблице 1 на стр. 1183 у J. Peters и S. Schaal, "Естественный актер-критик", Neurocomputing, том 71, №№7-9, стр. 1180-1190, 2008 г. Он применен с начальными параметрами w=w0 параметризованной политики π(a|s)=p(a|s, w), включающей следующие этапы в псевдокоде:
- естественный градиент, вычисленный с использованием метрики Фишера или полученный из политики, как описано в вышеуказанной публикации об алгоритме NAC. Алгоритм NAC с LSTD-Q полностью представлен в таблице 1 на стр. 1183 у J. Peters и S. Schaal, "Естественный актер-критик", Neurocomputing, том 71, №№7-9, стр. 1180-1190, 2008 г. Он применен с начальными параметрами w=w0 параметризованной политики π(a|s)=p(a|s, w), включающей следующие этапы в псевдокоде:
1: НАЧАЛО: Задать начальное состояние s0 ~ p(st) и выбрать параметры
At+1=0; bt+1=zt+1=0
2: Для t=0, 1, 2, … выполнить
3: Выполнит: Задать действие at ~ π(at|st), наблюдать следующее состояние
st+1 ~ p(st+1| st, at), и награда rt=r(st, at).
4: Оценка критика (LSTD-Q (λ)): Обновить
4.1: базисные функции:  ,
,
4.2: статистика:  ;
;  ; bt+1=bt+zt+1 rt,
; bt+1=bt+zt+1 rt,
4.3: параметры критика:  ,
,
5: Актер: Если оценка градиента является точной, обновить параметры политики
5.1:  и забыть (сбросить) статистику. КОНЕЦ.
и забыть (сбросить) статистику. КОНЕЦ.
[00165] Базисные функции φ(s) могут быть представлены путем преобразования измерительных данных, вводимых в пространство признаков, как описано в другом разделе в этом документе. В этом случае, базисные функции равны значениям признаков. Базисные функции также могут быть выбраны иным способом, или агент может использовать исходные измерительные данные. Базисная функция также может включать адаптивные способы или собственный этап обучения, который максимизирует результаты функции награды.
[00166] Важно отметить, что другие агенты укрепляющего обучения также являются применимыми. Могут быть применены множество других концепций агента политики обучения. Кроме того, согласно настоящему изобретению могут быть использованы другие источники, такие как сигнал rt награды, помимо выхода классификации или показателя качества. Например, в качестве источника сигнала награды может быть применен послеоперационный или предоперационный датчик. Функция награды может иметь значение вероятности между 0 и 1 или от -1 до 1 измеренных данных послеоперационного датчика, чтобы быть частью хорошего или плохого класса, что определяется классификатором, как описано выше. В случае, если для присуждения награды rt используется предоперационный датчик, агент укрепляющего обучения может найти набор параметров для достижения этой цели. Таким образом, укрепляющее обучение может быть этапом на пути к долговременной цели, на котором оно включает усвоение политики из заданных наград с использованием алгоритмов нахождения политики, таких как "естественный актер-критик".
ТЕХНИЧЕСКАЯ АРХИТЕКТУРА ВОСПРИЯТИЯ
[00167] Искусственный агент воспринимает свою среду посредством датчиков и действует в соответствии с этим восприятием посредством приводных устройств. Агент определен как архитектура с программой. Побуждающей ролевой моделью для него является естественное познание, и желательно реализовать подобное действующее познание в технических системах. Таким образом, агенту могут быть приданы познавательные способности, такие как извлечение информации, обучение и принятие решений для автоматизированной рабочей станции. Как часть процесса, эта секция вводит архитектуру, которая создает и позволяет агентам управлять производственными задачами. Для этого агенты следуют по когнитивному контуру "восприятие-действие" путем считывания данных от датчиков и определения действий для приводных устройств.
[00168] Естественная познавательная способность представляет собой способность извлекать соответствующую информацию из больших наборов данных и дифференцировать эту информацию по категориям. При переносе этой концепции из области естественного познания в мир математического анализа данных используется комбинация способов сжатия информации и способов классификации согласно настоящему изобретению для достижения подобного поведения. При промышленном изготовлении могут быть осуществлены множество производственных процессов с использованием модели черного ящика, основное внимание к которому сосредоточено скорее на входах и выходах ящика, чем на том, что фактически происходит внутри. К черному ящику, который может быть использован в производственных системах, в целом присоединены датчики и приводные устройства. Датчики, такие как видеокамеры, микрофоны, тактильные датчики и другие средства контролируют процесс изготовления. Эти системы также нуждаются в приводных устройствах, таких как линейные приводы или роботизированные позиционирующие устройства, для взаимодействия со средой. Для каждого технологического процесса эти приводные устройства должны быть параметризованы. Чтобы обучить агента адаптивному управлению по меньшей мере одним параметром этих производственных систем могут быть использованы различные комбинации самообучающихся алгоритмов, способов классификации, архивов данных знания, способов выделения признаков, способов уменьшения размерности и способов исследования многообразий. В настоящем изобретении также предложены различные способы управления как с открытым, так и с замкнутым контуром обратной связи, в которых используются множество различных датчиков и приводных устройств. После осуществления множества моделей и экспериментов была разработана простая архитектура, успешно и надежно объединяющая эти способы, по меньшей мере, в области обработки пищевого продукта. Однако обработка пищевого продукта может быть интерпретирована как форма черного ящика и, таким образом, может быть применена в технологических процессах других типов.
[00169] На фиг. 17 показана когнитивная архитектура, которая может быть подходящей для проектирования агентов, которые могут обеспечивать контроль или адаптивное управление технологическим процессом для производственных задач. На схеме показан коммуникационный блок и этапы обработки информации. Естественное познание, по-видимому, извлекает информацию, во-первых, путем идентификации репрезентативной системы символов, таких как структурированные сигналы. Подобный процесс может быть достигнут с использованием уменьшения размерности (DR), при котором агент использует низкоразмерное представление входящих измерительных данных. Затем, естественное познание распознает, присутствует ли знание о входящих сенсуальных событиях. Этот этап может быть достигнут путем использования способов классификации, которые категоризируют "чувственные" события или характеристики. Субъект естественного познания может принять решение об изучении или планировании новых действий. Для их репликации архитектура согласно настоящему изобретению предлагает способы самообучения, которые передаются в логические схемы для обработки информации. В попытках достижения быстрых реакций без необходимости начинать сложный процесс принятия решений вход датчика также может быть жестко соединен проводной связью, в результате чего приводное устройство может быть непосредственно инициирован в системе управления с замкнутым контуром обратной связи. Таким образом, архитектура согласно настоящему изобретению может быть спроектирована для четырех режимов использования, которые будут подробно описаны ниже: первое - сбор соответствующей информации; второе - прием от эксперта-человека обратной связи относительно того, как контролировать процессы и управлять ими, или управляемое обучение; третье - действие на основании полученного знания; и четвертое - автономное управление процессами в ранее незнакомых ситуациях. Как и в отношении других когнитивных архитектур, цель настоящего изобретения состоит в создании агентов с некоторым искусственным интеллектом или познавательными способностями, родственными человеческим.
[00170] Агенты могут быть составлены из нескольких компонентов различных способов уменьшения размерности и классификации, которые позволяют сравнивать рабочие характеристики составных агентов и модулей в отношении общего качества обработки пищевого продукта. Множество различных способов уменьшения размерности и классификации могут быть применимыми, и некоторые из них нашли признание в научно- исследовательской работе. Когнитивная архитектура согласно настоящему изобретению предлагает следующие модули для формирования агентов: анализ главных компонент (РСА), линейный дискриминантный анализ (LDA), изометрическое преобразование признаков (Isomap), машины опорного вектора (SVM), нечеткие методы k-ближайших соседей (KNN), искусственные нейронные сети (ANN) и укрепляющее обучение (RL), наряду с некоторыми другими способами. Три варианта реализации управляющих агентов согласно настоящему изобретению в пределах данной архитектуры представляют собой: агент А, соединяющий изометрическое преобразование признаков, машины опорного вектора, искусственные нейронные сети и пропорционально-интегрально-дифференциальное (ПИД) управление энергопитанием; агент В, соединяющий изометрическое преобразование признаков, машины опорного вектора и ПИД управление энергопитанием; или агент С, соединяющий искусственные нейронные сети и нечеткие методы k-ближайших соседей для управления.
ИЗВЛЕЧЕНИЕ СООТВЕТСТВУЮЩЕЙ ИНФОРМАЦИИ
[00171] В естественном познании человек извлекает или поглощает информацию из всего, что слышит, ощущает и видит. Таким образом, человек только в целом помнит самые интересные события. На этом основании, техническая познавательная система должна схожим образом извлекать соответствующую информацию из технологического процесса. Работа с извлеченными признаками, вместо исходных измерительных данных, имеет некоторые преимущества. Множество слабых сигналов датчика могут быть уменьшены в размерности до уменьшенного количества улучшенных сигналов, что приводит к более надежному признаку. Кроме того, для реализации управления технологическим процессом в режиме реального времени необходимо уменьшить объем входящих измерительных данных, поскольку увеличенное количество данных может значительно увеличивать время выполнения операций во всей системе.
[00172] В архитектуре согласно настоящему изобретению требуется испытательный прогон для извлечения первоначальной информации. Во время этого периода обучения агента диапазон управляемого параметра приводного устройства изменяется. Для определения, какая информация является наиболее подходящей, агент должен исследовать свой собственный диапазон действий. После первоначального эталонного испытания система анализирует записанные измерительные данные для определения репрезентативных признаков. Агент может выполнить вычисления признака отдельно для датчиков различных видов, однако измерительные блоки должны быть идеально обучены отображать входные измерительные данные в пространство изученных признаков. Нахождение пригодного для использования представления пространства признаков является важным, поскольку система может распознавать или реагировать на изменения только в значениях указанных признаков. Цель когнитивной обработки согласно настоящему изобретению состоит в предоставлении большого насколько возможно количества информации для последующих этапов обработки. Однако, исходные измерительные данные содержат повторения, корреляции и взаимозависимости, которыми можно пренебречь. Таким образом, для извлечения релевантной информации должны быть идентифицированы самые существенные признаки или те, которые содержат большую часть информации. Для этого "когнитивного" извлечения релевантной информации агент должен выполнить задачу без необходимого наблюдения со стороны эксперта-человека. Таким образом, выбран способ выделения признаков, который может быть применен ко всем различным видам обработки задач и соответствующих измерительных данных без потребности в изменении параметров или перенастройке. Способы построения многообразия или уменьшения размерности удовлетворяют эту потребность. Они могут уменьшить набор X измерительных данных с размерностью n в пространстве наблюдения до набора Y данных с размерностью p в пространстве признаков. Зачастую, новая величина р намного меньше чем n. Однако, были опробованы и испытаны множество линейных и нелинейных способов уменьшения размерности в различных целях. Настоящее изобретение обеспечивает подходящий способ выделения признаков для технологических рабочих станций, отвечающих следующим требованиям, причем предложенный способ выделения признаков работает прозрачно и может показывать этапы обработки пользователю. Предложенный способ выделения признаков может работать "без учителя". Данный способ выделения признаков реализуется в пределах умеренного временного периода конфигурации, в частности, во время обработки. Извлеченные признаки содержат достаточную технологическую информацию для надежной классификации в пределах нескольких загрузок пищевого продукта.
[00173] В сущности, анализ главных компонент позволяет найти ортогональные линейные комбинации, которые представляют увеличенный набор данных. Они могут быть вычислены для входящих векторов измерительных данных. Эти собственные векторы могут служить признаками классификации вплоть до порога d. Выделение признаков, объединенное с классификацией, может быть достигнуто с использованием линейного дискриминантного анализа. Анализ того же самого набора данных с использованием линейного дискриминантного анализа и трех изученных классов качества, определенных как "хороший", "средний" и "плохой", позволяет создать другой набор признаков. Выделение признаков также может быть достигнуто с использованием алгоритма Isomap. К сожалению, нелинейный признак не может быть отображен тем же способом, каким осуществляют линейное выделение признаков с использованием линейного дискриминантного анализа и анализа главных компонент. Признаки, извлеченные вышеуказанными способами, можно сравнивать в следующем. Признак, выделенный линейным дискриминантным анализом, по всей видимости, содержит больше подробностей чем любой из признаков, выделенных анализом главных компонент. С использованием этого способа вычисления признаки, выделенные линейным дискриминантным анализом, по всей видимости, содержат больше технологической информации в меньшем количестве признаков по сравнению с анализом главных компонент, поскольку они специально спроектированы для выделения необходимых классов. Кроме того, можно отобразить расчетные признаки с использованием анализа главных компонент и линейного дискриминантного анализа способом, при котором эти два алгоритма становятся более прозрачными чем алгоритм Isomap. Пользователь понимает, на что похож процесс, если признак идентифицирован в видеоматериале этого процесса, в результате простого просмотра этого видеоматериала. Алгоритмы анализа главных компонент и Isomap имеют преимущество, состоящее в том, что они могут работать "без учителя", что является невозможным для линейного дискриминантного анализа. Таким образом, линейный дискриминантный анализ просто служит сравнением с анализом главных компонент, но не рассматривается как альтернатива для необходимой архитектуры. Кроме того, признак линейного дискриминантного анализа, по всей видимости, чрезмерно индивидуализирован для конкретного процесса. Алгоритм Isomap имеет значительно более высокие времена выполнения анализа и расширения за пределы выборки. Таким образом, если классификация с использованием анализа главных компонент обеспечивает достаточные результаты, то они более применимы к системе во время ее исследования. Таким образом, предпочтительным способом может быть анализ главных компонент, если алгоритм Isomap не показывает значительно улучшенные характеристики в решении первой задачи настоящего изобретения. Таким образом, окончательный выбор способов уменьшения размерности следует отложить, поскольку самым важным критерием качества надо считать экспериментальные результаты, которые являются основой настоящего изобретения.
[00174] В сущности, уменьшение размерности может позволить агентам извлекать релевантную информацию в отношении обнаружения различий и подобий во время обучающего испытания. Такой подход помогает агенту обрабатывать только немногие значения признака по сравнению с намного более значительным объемом исходных измерительных данных. Кроме того, уменьшение размерности может поддерживать восприятие общих черт в незнакомых ситуациях, например, подобные характеристики обработки пищевого продукта, такие как размер и форма пищевого продукта, даже если они не являются частью обучения. Такой подход может улучшить адаптируемость агентов к неизвестным, но схожим ситуациям.
УПРАВЛЯЕМОЕ ОБУЧЕНИЕ С ЭКСПЕРТОМ-ЧЕЛОВЕКОМ
[00175] В естественном познании человече, например, в детстве, часто узнает от других, как решать сложные задачи. Схожим образом, машина должна первоначально научиться решать свои задачи у эксперта-человека. Управляемое обучение, по всей видимости, является самым эффективным способом настройки когнитивного агента для технологических задач. В промышленности обычно присутствует компетентный наблюдатель-человечек, когда устанавливают или настраивают технологическое оборудование. В предложенной архитектуре используется человеко-машинный интерфейс для приема обратной связи от эксперта, например, посредством интуитивного графического пользовательского интерфейса на сенсорном экране планшетного компьютера. Как указано выше, по меньшей мере одно испытательное действие на одно приводное устройство или тестовый прогон являются необходимыми в этой архитектуре в качестве начальной стадии обучения. Во время этого испытания агент выполняет один пробный прогон приводного устройства в пределах необходимого диапазона действий, и входные измерительные данные сохраняются. После такого прогона эксперт обеспечивает обратную связь относительно того, правильно ли выполнил робот прогон приводного устройства, или его действие оказалось неудачным или нежелательным. Обратная связь может относиться к множеству различных категорий таким образом, что могут быть определены различные виды отказов и выходных стратегий. Затем, алгоритм классификации может собрать признаки вместе с соответствующей надзорной обратной связью. Объединенный с таблицами преобразования, классифицирующий модуль будет служить в качестве архива знаний и хранилища данных планирования для классификации состояния существующей системы. В следующем разделе описано как агент может выполнять свои собственные действия и обеспечивать себя обратной связью; этот раздел в основном охватывает когнитивный аспект обучения под надзором эксперта-человека и применение усвоенного знания для контроля целей.
[00176] Выше были описаны способы классификации, такие как машины опорного вектора, нечеткий метод k-ближайших соседей и искусственные нейронные сети как. Чем дольше эксперт-человек обучает машину, тем больше вероятность того, что система достигнет необходимой цели. Время наблюдателя-человека для снижения затрат по возможности должно быть уменьшено до одного или двух эталонных испытаний.
ОБУЧЕНИЕ С ЧАСТИЧНЫМ ПРИВЛЕЧЕНИЕМ УЧИТЕЛЯ
[00177] Выше описано, как агенты в предложенной когнитивной архитектуре воспринимают свою среду и учатся у эксперта-человека, а также как отображаются их знания для обеспечения контроля. Заданный контрольный сигнал на основании выбранных признаков может быть получен от различных датчиков, которые интерпретируются с использованием обученного классификатора. Этот контрольный сигнал предназначен для улучшения качества и может быть применен к управлению параметрами процесса. Затем агент может изменить свою роль от наблюдения за процессом к фактическому действию на основании полученных знаний. Однако, если агент может быть допущен к управлению технологическим процессом в реальной технологической системе, он должен соответствовать множеству требований с характеристиками, близкими к совершенным. Ниже описаны некоторые из требований основной когнитивной архитектуры: модуль управления технологическим процессом должен быть выполнен с возможностью завершения по меньшей мере одного управляющего цикла от входа датчика до выхода приводного устройства; управляемый параметр при своем изменении должен оказывать действие на результат процесса с одновременным своевременным ответом; модуль управления технологическим процессом должен быть оптимизирован для обеспечения гармонического сочетания надежной устойчивости и необходимой динамичности.
[00178] Для реализации надежного управления технологическим процессом, подходящего для промышленных технологических процессов, часто требуется быстрое управление или управление с обратной связью в режиме реального времени. Преимущество рассматриваемой архитектуры состоит в том, что использование признаков, а не исходных измерительных данных, обеспечивает возможность ускоренного завершения циклов управления с минимальной потерей информации. В данной архитектуре может быть использовано электронное управляющее устройство любой конструкции, которое соответствует классификационному выходу. Упрощенная версия может иметь три возможных значения классификационного выхода: недопеченный, класс I; правильный, класс II; и перепеченный, класс III. Это может быть выражено с использованием:

где p - вероятности классов, и ye показатель качества.
[00179] Пропорционально-интегрально-дифференциальное электронное управляющее устройство может настроить параметр приводных устройств системы согласно контрольному сигналу, описанному выше в связи с управляемым обучением под надзором экспертов-людей. Объединение пропорционально-интегрально-дифференциального управления с результатами классификации позволяет агентам осуществлять обработку с управляемой подачей энергии, Это может быть реализовано в следующем виде:

где Р определяет прямопропорциональную составляющую управления, I определяет интегральную составляющую управления, и D определяет дифференциальную составляющую управления. Цель состоит в том, чтобы минимизировать ошибку et между показателем качества ye, выходом классифицирующего блока и ожидаемым значением 0,0. В этом контексте согласно настоящему изобретению применимость ожидаемого значения в зависимости от показателя качества, относящегося к классу вероятности, предоставляет возможность изменения этого значения для оптимизации ожидаемых результатов процесса. Один подход описывает пропорционально-интегрально-дифференциальное управление с искусственными нейронными сетями и соответствующие эксперименты. Другой исследует использование классифицирующего блока на основе машины опорного вектора для управления обработкой пищевого продукта.
ОБУЧЕНИЕ БЕЗ УЧИТЕЛЯ
[00180] Как предложено, самообучающийся механизм встроен в систему согласно настоящему изобретению. Проверка нового продукта на основании обучающих признаков может обнаружить новые или ранее неизвестные ситуации. В этих случаях система выполняет другое испытательное действие и классифицирует новый пищевой продукт с использованием ранее изученных признаков. На этот раз, отсутствует необходимость консультации с экспертом-человеком; система может отображать полученное знание на новый пищевой продукт автономно и может настраивать управление технологическим процессом надлежащим образом.
[00181] Для достижения управления процессом с обратной связью контрольный сигнал уе используется в качестве управляющей переменной. В качестве регулирующей переменной, которая может быть любым изменяемым технологическим параметром, взаимосвязанным с ye, лучше всего подходит энергопитание благодаря его низкоинерционности и сильной связи с ye. Величина контрольного сигнала может быть вычислена с использованием пропорционально-интегрально-дифференциального алгоритма, как показано в уравнении 3.2. Для достижения управления технологическим процессом агент замыкает контур управления путем соединения контрольного сигнала с пропорционально-интегрально-дифференциальным электронным управляющим устройством, как показано в уравнении 3.2. Электронное управляющее устройство обратной связи спроектировано в форме системы управления, действующей по принципу "одиночный вход - одиночный выход" (SISO), которая принимает контрольный сигнал ye от классифицирующего блока с 0<ye≤1 для слишком низкого и -1≤ye<0 для слишком высокого энергопитания и использует его в качестве заданного значения для минимизации ошибки электронного управляющего устройства.
[00182] В приведенном выше описании поясняется, каким образом когнитивные агенты получают знание из обратной связи эксперта-человека. Для когнитивной системы должна быть обеспечена возможность ее обучения из ее собственных действий, или она должна иметь собственную обратную связь. Этот вид познавательной способности может быть достигнут путем укрепляющего обучения (RL). Классификатор может выполнять роль обратной связи и поощрять агента укрепляющего обучения наградами за его собственные действия. Агент изучает политику действий или выпекания на основании обратной связи или наград, полученных за свои предшествующие действия. Таким образом, для проверки этого тезиса задача обучения агента состоит в получении знания о том, как обрабатывать пищевой продукт на основании полученного знания в различными скоростями без дальнейшего надзора эксперта-человека.
[00183] Для решения данной задачи обучения с использованием укрепляющего обучения необходима надежная функция награды. Поскольку система имеет множество входов измерительных данных, классификатор, идентифицирующий признаки хорошего выпекания, такой как машина опорного вектора, может служить в качестве функции награды rt, как показано на фиг. 23. Эти награды могут выполнять роль критика в способе естественного актера-критика, который описан выше. Таким образом, следующим действием, которое выбирает агент, является абсолютное энергопитание at. Выбранное действие зависит от усвоенной политики, как показано в:

[00184] Параметры wt политики основаны на градиенте  и wt-1, как показано в уравнении 2.25. Однако, для полного обзора примененного алгоритма необходимо ознакомиться с естественным алгоритмом актера-критика с методом обучения на основе временных различий наименьших квадратов (LSTD-Q(λ)). Политика должна предоставлять агенту возможность отображать состояния st в действия at путем обучения на основе наград rt. Награды естественным образом влияют на параметры политики. Наилучшая политика агента укрепляющего обучения согласно настоящему изобретению найдена с использованием сигма-функции:
и wt-1, как показано в уравнении 2.25. Однако, для полного обзора примененного алгоритма необходимо ознакомиться с естественным алгоритмом актера-критика с методом обучения на основе временных различий наименьших квадратов (LSTD-Q(λ)). Политика должна предоставлять агенту возможность отображать состояния st в действия at путем обучения на основе наград rt. Награды естественным образом влияют на параметры политики. Наилучшая политика агента укрепляющего обучения согласно настоящему изобретению найдена с использованием сигма-функции:

где Lm - максимальная разрешенная мощность, и η - шум исследования, определяющийся произведением случайного числа от -1 до 1 и параметра ε исследования. В настоящем изобретении исследованы модули, которые являются подходящими для когнитивной архитектуры машин для изготовления пищевого продукта в когнитивном контуре "восприятие-действие", соединяющем датчики и приводные устройства. Познавательные способности включают: извлечение соответствующей информации; обучение под надзором эксперта-человека; использование полученного знания для принятия решения; и получение знания о том, как действовать в ситуациях, поведению в которых агент ранее не обучался.
[00185] Как указано выше, способы описанного в настоящей заявке машинного обучения могут быть реализованы в любом представленном в настоящей заявке варианте реализации контролирующей системы для контроля тепловой обработки.
[00186] Ниже описан вариант реализации контролирующей системы 100 для контроля тепловой обработки, показанной на фиг. 18А и 18В. Контролирующая система для контроля тепловой обработки содержит печь 100 и контролирующее устройство 150, как описано выше со ссылкой на фиг. 1А и 1В. Однако, вариант реализации, описанный со ссылкой на фиг. 18А, не ограничивается использованием окна 130, как описано выше, и, таким образом, может быть использовано окно 1800 любого типа, позволяющее видеокамере 160 наблюдать за подлежащим нагреву пищевым продуктом. Вариант реализации контролирующего устройства 150 также не ограничивается его размещением внутри варианта реализации, показанного на фиг. 1А и 1В, но также может быть размещен внутри линии печи или предварительной выпечки, или линии для нагрева пищевого продукта, как описано со ссылкой на фиг. 8-10, или любого другого варианта реализации, описанного выше.
[00187] На фиг. 18В показана блок-схема варианта реализации контролирующего устройства 150. Контролирующее устройство 150 и контролирующая система 100 соответственно содержат: измерительный блок 1810, содержащий по меньшей мере один датчик 1812 для определения текущих измерительных данных о нагреваемом пищевом продукте, процессор 1820 для определения текущих данных о признаках из текущих измерительных данных и контролирующий блок 1830, выполненный с возможностью определения текущего состояния процесса нагревания в текущем процессе нагревания контролируемого пищевого продукта путем сравнивания текущих данных о признаках с эталонными данными о признаках эталонного процесса нагревания. Контролирующая система для контроля тепловой обработки дополнительно содержит обучающий блок 1840, выполненный с возможностью определения преобразования текущих измерительных данных в текущие данные о признаках и с возможностью определения эталонных данных о признаках эталонного процесса нагревания на основании данных о признаках по меньшей мере одного обучающего процесса нагревания. Контролирующее устройство 150 дополнительно содержит классифицирующий блок 1850, выполненный с возможностью классифицирования типа подлежащего нагреву пищевого продукта и выбора эталонного процесса нагревания, соответствующего указанному определенному типу пищевого продукта. Следует отметить, что соответствующие блоки 1820, 1830, 1840 и 1850 могут быть реализованы в форме отдельных блоков или также могут быть реализованы в форме программы, исполняемой центральным процессором контролирующего устройства 150.
[00188] Измерительный блок 1810 содержит по меньшей мере один датчик 1812, причем датчиком 1812 может быть любой датчик, как описано выше, в частности, видеокамера 160, как описано со ссылкой на фиг. 1А и 1В, любой датчик измерительной системы 850, показанной на фиг. 7 или 8, или измерительной системы, показанной на фиг. 12. В частности, по меньшей мере один датчик 1812 измерительного блока 1810 содержит по меньшей мере одно из гигрометра, датчика температуры загрузки, датчика температуры обрабатывающей камеры, акустических датчиков, весов, таймера, видеокамеры, датчика изображений, матрицы фотодиодов, анализатора газа в обрабатывающей камере, средств для определения температурных профилей датчиков температуры загрузки, средств для определения электромагнитного или акустического технологического облучения подлежащего обработке пищевого продукта, таких как свет или звук, отраженных или излученных в ответ на действие световых или звуковых излучателей или источников, средств для определения результатов объемных измерений подлежащего нагреву пищевого продукта, включая объемные или стерео-видеосистемы или радар, или средств для определения типа или структуры, или рисунка, или оптических характеристик, или объема, или массы подлежащего обработке пищевого продукта. Согласно этому варианту реализации предпочтительно использовать максимальное количество измерительных данных в качестве входных данных, насколько это возможно. Трудно предсказать, какой сигнал датчика может предоставить лучшую информацию. Поскольку алгоритмы обнаруживают дисперсию эталонного выпекания, обучающий блок 1840, используемый для осуществления машинного обучения, может выбрать различные измерительных данные для индивидуального дифференцированного выпекания продуктов. Иногда самыми важными данными могут быть дисперсия объема и цвета, иногда это может быть влажность, температура и вес.
[00189] Согласно одному варианту реализации измерительный блок 1810 содержит видеокамеру 160 в качестве единственного датчика 1812, что приводит к преимуществу, состоящему в отсутствии необходимости встраивания в контролирующее устройство 150 дополнительных датчиков. Таким образом, контролирующее устройство 150 может быть выполнено в форме одиночного компактного корпуса, установленного на дверце печи 110. В контролирующем устройстве 150 также может быть размещен входной интерфейс 1814 измерительных данных, в котором текущие измерительные данные вышеуказанных датчиков могут быть считаны измерительным блоком 1810 и переданы процессору 1820. Текущие измерительные данные 1812 не обязательно являются необработанными данными, но могут быть предварительно обработанными данными, такими как предварительно обработанные в большом динамическом диапазоне пиксельные данные из видеокамеры 160 или предварительно обработанные измерительные данные лазерной триангуляции, которые могут содержать, например, расчетное значение объема наблюдаемой части пищевого продукта.
[00190] Процессор 1820, контролирующий блок 1830, обучающий блок 1840 и классифицирующий блок 1850 взаимодействуют для обеспечения пользователя оптимизированным результатом нагревания пищевого продукта на основании способов машинного обучения, как описано выше.
[00191] В настоящей заявке процессор 1820 и обучающий блок 1840 используются для уменьшения количества текущих измерительных данных вышеуказанного по меньшей мере одного датчика 1812. В частности, обучающий блок 1840 выполнен с возможностью определения преобразования текущих измерительных данных в текущие данные о признаках посредством анализа дисперсии по меньшей мере одного обучающего процесса нагревания для уменьшения размерности текущих измерительных данных. Обучающий блок 1840 может быть встроен в контролирующее устройство 150 или может быть выполнен в форме наружного блока, расположенного в другом месте, в котором передача данных может быть обеспечена, например, посредством сети Интернет (как описано ниже в отношении использования контуров анализа главных компонент). По меньшей мере один обучающий процесс нагревания, таким образом, может быть основан на текущих измерительных данных измерительного блока 1810 локального контролирующего устройства 150, но также может быть основан на текущих измерительных данных измерительных блоков дополнительных контролирующих устройств, расположенных в различных местах (во всем мире), в случае, если используются однотипные измерительные данные. Посредством обучающих процессов нагревания размерность измерительных данных может быть уменьшена, причем измерительные данные с самой высокой дисперсией с течением времени имеют увеличенный вес.
[00192] Дисперсионный анализ, выполненный обучающим блоком 1840, содержит по меньшей мере одно из следующего: анализ главных компонент (РСА), изометрическое преобразование признаков (ISOMAP), линейный дискриминантный анализ (LDA) и методика уменьшения размерности, которая подробно описана выше.
[00193] Таким образом, интерпретация и выбор доминирующих признаков могут быть выполнены путем применения анализа главных компонент (РСА) к последовательности данных обработки пищевого продукта. Как описано выше, таким образом признаки могут быть отсортированы по дисперсии, и наиболее выделяющиеся признаки могут быть наиболее предпочтительными для контроля. Путем выполнения анализа как описано выше может быть выведено преобразование для преобразования измерительных данных в данные о признаках, имеющие уменьшенную размерность и являющиеся характерными для выполняемого процесса нагревания и контролируемыми контролирующим устройством 150. После этого, преобразование, которое также может быть принято от внешнего сервера или может быть сохранено в запоминающем устройстве контролирующего устройства 150, может быть применено процессором 1820 для преобразования входящих текущих измерительных данных, принятых от измерительного блока 1810, в текущие данные о признаках, которые затем могут быть переданы в контролирующий блок 1830. Следует отметить, что в некоторых случаях "преобразование" для некоторых измерительных данных может быть идентифицирующим преобразованием, в результате чего некоторые из измерительных данных могут быть равны соответствующим данным о признаках, в частности, это справедливо для предварительно обработанных измерительных данных, уже содержащих характеристические значения, подобные абсолютной температуре внутри нагревающей камеры, значению объема подлежащего нагреву пищевого продукта, значению влажности внутри нагревающей камеры. Однако, преобразованием предпочтительно является преобразование, в котором уменьшается размерность данных. Обучающий блок может быть дополнительно выполнен с возможностью определения преобразования текущих данных о признаках в данные о признаках с использованием дисперсионного анализа по меньшей мере одного обучающего процесса нагревания для уменьшения размерности текущих данных о признаках.
[00194] Контролирующий блок 1830 выполнен с возможностью определения текущего состояния процесса нагревания в текущем процессе нагревания контролируемого пищевого продукта путем сравнивания текущих данных о признаках с эталонными данными о признаках эталонного процесса нагревания.
[00195] Во время контроля одно из ожидаемых преимуществ состоит в интерпретации текущих данных о признаках и выработке решения о регулярной и нерегулярной обработке. С использованием этого способа могут быть собраны признаки обычного поведения и затем усвоено нерегулярное поведение, если значения признака отличаются от предварительно изученного обычного поведения. Это может быть осуществлено включением классификаторов, таких как машины опорного вектора или классификаторы ближайших k-соседей, как описано выше. Контролирующий блок 1830 может быть выполнен с возможностью определения по меньшей мере одного действия по меньшей мере одного приводного устройства на основании определенных текущих данных о признаках или текущего состояния процесса нагревания, причем управляющий блок 1300, описанный выше, может быть реализован в контролирующем блоке 1830. Таким образом, контролирующий блок 1830 может быть выполнен с возможностью выполнения всех способов машинного обучения, описанных выше.
[00196] Согласно одному варианту реализации эталонные данные о признаках эталонного процесса нагревания сравнивают с текущими данными о признаках для определения текущего состояния процесса нагревания. Эталонные данные о признаках могут быть заданными данными, принятыми от наружного сервера или сохраненными в запоминающем устройстве контролирующего устройства 150. Согласно другому варианту реализации обучающий блок 1840 (расположенный снаружи или внутри контролирующего устройства 150) может быть выполнен с возможностью определения эталонных данных о признаках эталонного процесса нагревания путем объединения заданных данных о признаках программы нагрева с обучающим набором данных о признаках по меньшей мере одного обучающего процесса нагревания, который классифицирован пользователем как являющийся частью обучающего набора. Программа нагрева может рассматриваться как последовательность с временной зависимостью данных о признаках, являющихся характерными для некоторого вида или типа подлежащего нагреву пищевого продукта.
[00197] Например, эталонный процесс нагревания или заданная программа нагрева могут представлять собой последовательность во времени данных о признаках некоторого вида подлежащего нагреву пищевого продукта, например, круассана, что приводит к оптимизированному результату нагревания или выпекания. Иными словами, если текущие данные о признаках точно следуют по зависимому от времени пути эталонных точек данных о признаках в пространстве признаков, имеющем размерность количества выбранных релевантных признаков, пищевой продукт будет нагрет оптимизированным способом по истечении заданного оптимизированного времени, т.е., круассан будет испечен с наилучшим качеством. Оптимизированное время может зависеть от температуры внутри нагревательной или пекарной камеры.
[00198] Объединение заданных данных о признаках программы нагрева с обучающим набором данных о признаках по меньшей мере одного обучающего процесса нагревания, классифицируемого пользователем как часть обучающего набора, означает, что облако точек данных о признаках в пространстве признаков обучающего набора (т.е. по меньшей мере одного обучающего процесса нагревания, который пользователь считает "хорошим"), усредняют для каждой временной точки (центр облака точек задан внутри пространства признаков) и затем используют для адаптирования заданной программы нагрева. Это может быть выполнено путем дальнейшего усреднения признаков программы нагрева и признаков обучающего набора в равной мере или взвешивающим способом для каждой временной точки. Например, вес данных обучающего набора может составлять 25%, и вес данных заданной программы нагрева может составлять 75%.
[00199] Таким образом, по меньшей мере одно эталонное выпекание (обучающий процесс нагревания) может быть использован для оптимизации последующих выпеканий. Дополнительная обратная связь от последующих выпеканий может оптимизировать индивидуальные программы выпекания соответствующим образом. Соответственно, можно достичь более согласованного хлебопекарного качества, если текущее выпекание корректируется с использованием текущих измерительных данных и расчетными изменениями, извлеченными из различия между текущим выпеканием и так называемой "правдой жизни", т.е., эталонным процессом нагревания, который является программой выпекания (заданной программой нагревания), объединенных с данными о признаках по меньшей мере одного эталонного выпекания (обучающего набора), а также данными о признаках, полученными от более поздней обратной связи (обучающего набора) для программы выпекания и ее соответствующих измерительных данных.
[00200] Таким образом, могут быть вычислены существенные признаки с соответствующими значениями признака из измерительных данных эталонного выпекания, объединенных с временем работы программы выпекания. В настоящей заявке могут быть использованы множество различных вариантов вычисления признака и с последующим сортированием по дисперсии. Возможным механизмом для сортирования по дисперсии является описанный выше анализ главных компонент (РСА). Если несколько признаков и значений признака в течение некоторого периода времени вычислены из эталонного выпекания, эти наборы признака и значений признака могут быть отсортированы по времени с использованием анализа главных компонент.
[00201] Управляющий алгоритм для повторяющихся выпеканий может быть спроектирован автоматически с использованием по меньшей мере одного из самых существенных признаков и наборов данных значения признака, предпочтительно того, который имеет самую значительную дисперсию. Если имеются несколько эталонных выпеканий, предпочтительно использовать то, которое имеет самую высокую дисперсию и самую высокую повторяемость значения признака.
[00202] Для реализации вышеуказанной возможности для адаптации заданной программы нагревания для формирования "правды жизни", т.е. эталонного процесса нагревания, контролирующее устройство 150 дополнительно может содержать записывающий блок 1822 для записи текущих данных о признаках текущего процесса нагревания, причем обучающий блок 1840 выполнен с возможностью принимать записанные данные о признаках от записывающего блока 1822, которые будут использоваться в качестве данных о признаках обучающего процесса нагревания.
[00203] Классифицирующий блок 1850 может быть использован для классифицирования типа подлежащего нагреву пищевого продукта. Это может быть выполнено путем обработки пиксельного изображения подлежащего нагреву пищевого продукта, например, способами распознавания поверхности. После определения типа подлежащего нагреву пищевого продукта (рогалик, сдоба, круассан или хлеб) может быть использована классификация для выбора соответствующей заданной программы нагревания или сохранения эталонного процесса нагревания, соответствующего данному типу подлежащего нагреву пищевого продукта. Кроме того, могут быть использованы подкатегории, например, такие как круассан небольшого размера, круассан среднего размера или круассан большого размера. Также могут быть сохранены различные эталонные процессы нагревания относительно продукта не пищевой категории. Например, это может быть эталонная программа нагревания, соответствующая различным зависимым от времени средам или параметрам печи.
[00204] Например, в способе выпекания согласно настоящему изобретению могут быть учтены метеорологические данные. При известной географической высоте геометрического положения выпекающей печи может быть определена точка кипения, в соответствии с которой может быть адаптирована программы выпекания. Кроме того, данные давления, температуры и влажности местной среды печи могут быть использованы для дополнительной адаптации программы выпекания. Таким образом, эти данные могут быть сохранены и использованы в качестве индексных данных для некоторых эталонных программ нагревания, которые впоследствии могут быть найдены в запоминающем устройстве.
[00205] Кроме того, статистика загрузок, порций и коррекций также может быть использована в качестве данных для самообучающегося процесса выпекания согласно настоящему изобретению. Таким образом, исторические данные выпекания могут способствовать усовершенствованию процесса выпекания согласно настоящему изобретению. Процесс выпекания может быть улучшен посредством распределенной обратной связи, учитываемой в соответствии с определением роли согласно настоящему изобретению. Контролирующие системы для контроля тепловой обработки во время использования дополнительно могут быть отображены на масштабируемой главной схеме.
[00206] Кроме того, в исторических данных выпекания также может быть учтено количество выпеченных продуктов в течение периода времени. Контролирующая система для контроля тепловой обработки может находить в исторических данных выпекания периодически происходящие минимумы и максимумы изготовления и прогнозировать появление следующего минимума или максимума. Затем, контролирующая система для контроля тепловой обработки может сообщить пользователю системы о чрезмерном или недостаточном запланированном количестве пищевого продукта для изготовления в период ожидаемого минимума или максимума.
[00207] Текущее состояние процесса нагревания может быть определено путем сравнивания текущих данных о признаках с эталонными данными о признаках. Сравнение может быть выполнено путем определения расстояний текущих данных о признаках и эталонных данных о признаках для каждой временной точки эталонной программы нагревания. Таким образом, путем определения ближайшего расстояния из указанных определенных расстояний может быть найдена временная точка с ближайшим расстоянием в эталонной программе нагревания, и, таким образом, может быть определено, например, оставшееся время выпекания.
[00208] Как описано выше, измерительный блок 1810 может содержать видеокамеру, подобную видеокамере 160, для записи пиксельного изображения нагретого пищевого продукта, причем текущие измерительные данные видеокамеры соответствуют текущим пиксельным данным текущего пиксельного изображения.
[00209] Обнаружение признаков для обработки изображения может включать следующие этапы: обнаружение краев, углов, пятен, интересующих областей, интересующих точек, обработку цветных изображений или изображений серого уровня, форм, гребней, пятен, интересующих областей или представляющих интерес точек. Получение признака на основании измерительных данных также может включать выбор признаков на основании целевых амплитуды или частоты.
[00210] В настоящей заявке края представляют собой точки, в которых присутствует граница (или край) между двумя областями изображения. В целом, край может иметь почти произвольную форму и может включать переходы. Практически, края обычно определяются как наборы точек в изображении, градиент которых имеет вполне определенную величину. Кроме того, некоторые общие алгоритмы связывают вместе точки с высоким градиентом для формирования более полного описания краев. Эти алгоритмы обычно налагают некоторые ограничения на свойства края, такие как форма, гладкость и значение градиента. Локально края имеют одну размерную структуру.
[00211] Термины, обозначающие углы и представляющие интерес точки, используются с некоторой взаимозаменяемостью и относятся к точечным признакам в изображении, которое имеет локальные двумерные структуры. Название "угол" возникло из того, что ранее разработанные алгоритмы сначала выполняли распознавание края и затем анализировали края для нахождения резких изменений направления (углов). Впоследствии алгоритмы были усовершенствованы таким образом, что явное выделение края больше не требовалось, например, за счет поиска большой кривизны в градиенте изображения. Затем, было замечено, что так называемые углы также обнаруживаются на частях изображения, которые не являются углами в традиционном смысле (например, обнаруживаются на небольших ярких пятнах на темном фоне). Эти точки часто известны как представляющие интерес точки, но термин "угол" продолжают использовать по традиции.
[00212] Пятна обеспечивают дополнительное описание структур изображения в областях в противоположность углам, которые больше напоминают точку. Тем не менее, описатели пятна часто содержат предпочтительную точку (локальный максимум реакции оператора или центра тяжести), что означает, что множество датчиков пятен также могут расцениваться как операторы представляющей интерес точки. Датчики пятна могут обнаруживать области в изображении, которые являются слишком плавными и не обнаруживаются датчиком угла. Ниже рассмотрено сжатие изображения с последующим обнаружением угла. Датчик реагирует на точки, которые являются острыми в сжатом изображении, но могут быть плавными в исходном изображении. В этой точке различие между датчиком угла и датчиком пятна становится до некоторой степени нечетким. По большому счету, это различие может быть исправлено путем включения соответствующего понятия масштаба. Тем не менее, по причине характера их реакции на структуры изображения различных типов в различных масштабах датчики пятен на основе LoG (лапласиан гауссиана) и DoH (разность гауссианов) также упомянуты в публикациях относительно обнаружения угла.
[00213] Для удлиненных объектов понятие гребней является естественным инструментом. Описатель гребня, вычисленный из изображения в серых тонах, может выглядеть как обобщение срединной оси. С целесообразной точки зрения, гребень можно считать одномерной кривой, которая представляет ось симметрии и, кроме того, имеет признак локальной ширины гребня, относящийся к каждой точке гребня. Однако, к сожалению, извлекать признаки гребня из общих классов изображений серого уровня алгоритмически сложнее чем признаки края, угла или пятна. Тем не менее, описатели гребня часто используются для выделения дорог в аэрофотоснимках и кровеносных сосудов в медицинских изображениях.
[00214] Текущие пиксельные данные могут содержать первые пиксельные данные, соответствующие первому цвету, вторые пиксельные данные, соответствующий второму цвету, и третьи пиксельные данные, соответствующие третьему цвету, причем первый, второй и третий цвет обозначены как R, G и В соответственно. В настоящей заявке источник освещения для освещения пищевого продукта предпочтительно является источником белого света, однако, также может быть использован источник монохроматического освещения с предпочтительной длиной волны в оптической области, составляющей, например, 600 нм, для наблюдения серого пиксельного изображения в свете с соответствующей длиной волны.
[00215] При условии отдельного анализа пиксельных значений R, G и В может быть реализован алгоритм, который может облегчить исследование цвета хлеба. В настоящей заявке пиксели изображения хлеба предпочтительно выделяют из пикселов изображения печи посредством цвета. Такой подход имеет преимущество, состоящее в использовании большого динамического диапазона (HDR) предварительно обработанных изображений для получения увеличенного количества информации об интенсивности для достижения улучшенной сегментации. Таким образом, видеокамера предпочтительно выполнена с возможностью генерирования обработанных пиксельных изображений в большом динамическом диапазоне в качестве текущих пиксельных данных. В настоящей заявке также может быть реализовано логарифмическое масштабирование, при котором видеокамера выполнена с возможностью записи линейных, логарифмических или объединенных линейно-логарифмических пиксельных изображений. Для изучения пиксельного изображения хлеба могут быть использованы искусственная нейронная сеть с обратным распространением или класс машины опорного вектора, как описано выше, которые обучают с использованием изображений, на которых печь маскирована вручную.
[00216] Например, может случиться так, что при выпекании булочек самым существенным изменением во время выпекания окажется изменение цвета (изменение интенсивности пикселов) и изменение объема (изменение количества пикселов с конкретной интенсивностью). Эти изменения могут быть двумя самыми существенными признаками во время эталонного выпекания или эталонного процесса нагревания и соответствующими изменениями значений признаков с течением времени. Эти изменения создают характеристику процесса выпекания. Например, значение признака, представляющее изменение объема, может иметь место самое большее через 10-20 минут, и изменение цвета через 15-20 минут после начала выпекания. Таким образом, эти признаки могут быть обнаружены в повторных выпеканиях посредством классификатора, такого как вышеуказанная машина опорного вектора, во входящих измерительных данных повторного выпекания, так что самые высокие вероятности соответствуют программе эталонного выпекания или эталонного нагревания. Может случиться так, что, например, изменение цвета при повторном выпекании происходит самое большее через 5 минут после изменения объема. Таким образом, разница во времени между повторным выпеканием и эталонным выпеканием может составлять 50%. Это приведет к адаптации оставшегося времени выпекания по меньшей мере на 50%. Таким образом, использованное время составляет 5 минут вместо 15.
[00217] Кроме того, может быть использован коэффициент воздействия, который может влиять на воздействие управляющего алгоритма на программу повторного выпекания. Этот коэффициент воздействия может быть задан автоматически таким образом, что количество эталонных выпеканий влияет на доверительную вероятность, или указанный коэффициент воздействия задают вручную. Он также может быть оптимизирован посредством дистанционной системы с использованием описанной ранее информационной технологии.
[00218] Кроме того, в частности, может быть изменена температура внутри этой системы путем изменения признака, представляющего изменение цвета. Как описано выше, могут быть вычислены признаки, представляющие изменение цвета (изменение интенсивности пикселов). Интенсивность пиксела может быть нормализована. После нормализации температура может быть настроена согласно изменению цвета. Если, например, после истечения 75% оставшегося времени не появилось ожидаемое изменение цвета, температура может быть повышена, или если наблюдаются изменения цвета намного больше чем ожидаемые для эталонного выпекания, температура может быть снижена.
[00219] Контролирующее устройство 150 дополнительно может содержать управляющий блок 1860, выполненный с возможностью переключения процесса нагревания от процесса приготовления пищевого продукта к процессу выпекания на основании результатов сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания. Текущее состояние процесса нагревания вычисляют, как указано выше, путем определения временной точки "ближайшего расстояния". По результатам сравнивания временных точек заданного состояния процесса нагревания и расчетной временной точки процесс нагревания изменяют, если расчетная временная точка расположена после временной точки заданного состояния процесса нагревания. Например, по умолчанию расстойка должна быть закончена после изменения объема подлежащего нагреванию пищевого продукта на 100%, так что если булочка или круассан увеличился в объеме вдвое, расстойку необходимо прекратить и начать процесс выпекания. Изменение объема хлеба или пищевого продукта, который должен быть испечен, может быть обнаружено по признакам пикселов изображения видеокамеры весьма эффективным способом. Управляемая машина для тепловой обработки может быть встроенной машиной для расстойки/выпекания, однако, также можно управлять различными машинами для расстойки или выпекания.
[00220] Для упрощения вычислений и достижения повторяемых результатов температура нагревания в текущем процессе нагревания должна оставаться постоянной.
[00221] Управляющий блок 1860 дополнительно выполнен с возможностью ограничения процесса нагревания на основании результата сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания, соответствующим конечной точке нагрева. Управляющий блок 1860 может быть выполнен с возможностью оповещения пользователя о времени завершения процесса нагревания. Таким образом, контролирующее устройство может содержать сигнальный блок 1870 и отображающий блок 1880. Отображающий блок 1880 предназначен для индикации текущего состояния процесса нагревания, например, оставшегося времени нагревания или выпекания. Отображающий блок 1880 дополнительно может показывать текущее пиксельное изображение внутренней части камеры для тепловой обработки для визуального контроля пищевого подлежащего нагреванию продукта пользователем. Управляющий блок 1860 может быть выполнен с возможностью управления отображающим блоком 1880, выполненным с возможностью индикации оставшегося времени процесса нагревания, на основании результата сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания, соответствующим конечной точке нагрева, и/или с возможностью отображения изображений внутренней части камеры для тепловой обработки.
[00222] Управляющий блок 1860 дополнительно соединен с выходным интерфейсом 1890 для управления приводными устройствами, как описано выше или ниже, такими как терморегулятор нагревающей камеры, средства для регулирования влажности в камере для тепловой обработки путем добавления воды или устройство управлением вентиляционным механизмом (вентиляционной заслонкой). Приводные устройства дополнительно могут содержать средства для регулирования скорости вентилятора, средства для регулирования разницы давлений между камерой для тепловой обработки и соответствующей средой, средства для задания кривой изменения температуры в зависимости от времени в камере для тепловой обработки, средства для выполнения и регулирования различных процедур тепловой обработки, таких как расстойка или выпекание, средства для регулирования профилей внутренних потоков газа в камере для тепловой обработки, средства для регулирования интенсивности электромагнитного и звукового излучений соответствующих электромагнитных или звуковых излучателей для исследования или наблюдения свойств подлежащего нагреву пищевого продукта.
[00223] В частности, управляющий блок 1860 выполнен с возможностью управления терморегулятором нагревающей камеры, средствами для регулирования влажности в камере для тепловой обработки путем добавления воды или пара, устройством управления вентиляционным механизмом, средствами для регулирования скорости вентилятора, средствами для регулирования разницы давлений между камерой для тепловой обработки и соответствующей средой, средствами для задания кривой изменения температуры в зависимости от времени в камере для тепловой обработки, средствами для выполнения и регулирования различных процедур тепловой обработки, таких как расстойка или выпекание, средствами для регулирования профилей внутренних потоков газа в камере для тепловой обработки, средствами для регулирования интенсивности электромагнитного и звукового излучений соответствующих электромагнитных или звуковых излучателей для исследования или наблюдения свойств подлежащего нагреву пищевого продукта.
[00224] Способ контроля тепловой обработки согласно настоящему изобретению включает определение текущих измерительных данных нагреваемого пищевого продукта; определение текущих данных о признаках текущих измерительных данных; и определение текущего состояния процесса нагревания в текущем процессе нагревания контролируемого пищевого продукта путем сравнивания текущих данных о признаках с эталонными данными о признаках эталонного процесса нагревания. Способ предпочтительно дополнительно включает определение преобразования текущих измерительных данных в текущие данные о признаках и/или определение эталонных данных о признаках эталонного процесса нагревания на основании данных о признаках по меньшей мере одного обучающего процесса нагревания. Кроме того, способ включает определение преобразования текущих измерительных данных в текущие данные о признаках посредством дисперсионного анализа по меньшей мере одного обучающего процесса нагревания для уменьшения размерности текущих измерительных данных. Способ дополнительно включает определение преобразования текущих данных о признаках в данные о признаках посредством дисперсионного анализа по меньшей мере одного обучающего процесса нагревания для уменьшения размерности текущих данных о признаках. Дисперсионный анализ предпочтительно включает по меньшей мере одно из следующего: анализ главных компонент (РСА), изометрическое преобразование признаков (алгоритм ISOMAP), линейный дискриминантный анализ (LDA) и методика уменьшения размерности. Способ дополнительно предпочтительно включает определение эталонных данных о признаках эталонного процесса нагревания путем объединения заданных данных о признаках программы нагревания с обучающим набором данных о признаках по меньшей мере одного обучающего процесса нагревания, классифицированного пользователем как часть обучающего набора. Кроме того, посредством способа согласно настоящему изобретению могут быть записаны текущие данные о признаках текущего процесса нагревания, причем записанные данные о признаках используются в качестве данных о признаках обучающего процесса нагревания. Кроме того, способ может включать классификацию типа подлежащего нагреву пищевого продукта и выбор эталонного процесса нагревания, соответствующего определенному типу пищевого продукта. Предпочтительно процесс нагревания переключается от процесса расстойки к процессу выпекания на основании результата сравнения текущего состояния процесса нагревания с заданным состоянием процесса нагревания. Температуру нагревания в текущем процессе нагревания предпочтительно сохраняют постоянной. Предпочтительно процесс нагревания прекращают на основании результата сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания, соответствующим конечной точке нагрева. Согласно предпочтительному варианту реализации пользователя предупреждают о том, когда процесс нагревания должен быть завершен.
[00225] Согласно другому варианту реализации контролирующего устройства 150 машинное обучение может быть использовано для системы с множеством входов и множеством выходов (MIMO). В частности, регулирующая система для добавленной воды, оставшегося времени выпекания и/или температуры может быть реализована посредством контролирующей системы для контроля тепловой обработки с использованием способов машинного обучения.
[00226] Система собирает все измерительные данные во время эталонного выпекания. В случае влажности по меньшей мере один гигрометр обнаруживает заданное значение влажности за время выпекания во время эталонного выпекания. При повторении выпекания того же самого продукта количество добавленной воды может быть различным. Количество выпекаемых продуктов может быть различным, объем печи может быть различным, или может быть увеличенное или уменьшенное количество льда или воды на выпекаемых продуктах перед их загрузкой в печь.
[00227] В отличие от других систем, система управления согласно настоящему изобретению добавляет любое необходимое количество воды для достижения условий, подобных условиям эталонного выпекания. Поскольку оставшееся время выпекания может быть отрегулировано системой управления, время, в которое будет добавлена вода, также может быть изменено. Вместо использования фиксированного времени, такого как, добавление 1 литр воды по истечении 10 минут из 20-минутого интервала времени, соответствующего программе выпекания согласно данному варианту реализации, система добавляет столько воды, сколько необходимо для достижения эталонного уровня влажности выпекания после истечения 50% затраченного времени.
[00228] После распознавания нерегулярного поведения при осуществлении настоящего изобретения этот сигнал или неравномерность и соответствующая ему амплитуда могут быть использованы для регулирования обрабатывающих устройств, таких как смесители (для регулирования энергии, введенной в тесто), тестоделительные машины (для регулирования частоты разрезания) или технологические печи (для регулирования времен или температуры программы выпекания) в процесс обработки пищевого продукта.
[00229] Согласно другому варианту реализации наблюдение за пищевым продуктом, находящимся внутри пекарной камеры, может быть осуществлено "вживую" (в режиме реального времени), в результате чего может быть получен вид внутренней части печи в режиме реального времени, обеспечивающий возможность дистанционного доступа к процессу выпекания. Также может быть реализована дистанционное регулирование печи для улучшения поведения самообучающейся контролирующей системы для контроля тепловой обработки во время выпекания.
[00230] Согласно одному из вариантов реализации могут быть использованы контуры "восприятия", "познания" и "действия" (Р-С-А), когнитивные агенты и способы машинного обучения, подходящие для промышленных способов с использованием приводных устройств и интеллектуальных датчиков. Передача когнитивных способностей, знания и навыков, а также создание множества взаимодействующих контуров Р-С-А являются предпочтительными на когнитивном предприятии.
[00231] Только очень немногие технологические процессы обработки пищевых продуктов являются уникальными. Большая часть технологических способов обработки пищевого продукта, выполняемых в различных установках или в разное время, решают идентичные задачи в одинаковых условиях. Однако, часто между этими процессами существует ограниченный обмен информацией или не существует вовсе. Одинаковые станции для обработки пищевого продукта часто требуют индивидуальной настройки каждого объекта, управляющего одинаковыми технологическими задачами. Для повышения способности машин помогать друг другу предпочтительным является объединение в пространстве или времени распределенных контуров Р-С-А. Решения некоторых проблем способствуют достижение этой цели: Для обеспечения возможности передачи навыка между различными объектами предпочтительным является установление надежной и настраиваемой многоконтурной топологии Р-С-А. Такая метасистема должна уметь идентифицировать подобные процессы, преобразовывать измерительных данные, усваивать признаки и анализировать сущности различных объектов. Способы уменьшения размерности, группирования и классификации могут обеспечить возможность объединения машин на более высоких уровнях. Машинно-машинные модели доверия, коллективное обучение и представление знания являются существенными для достижения этой цели. Кроме того, некоторые технологические способы могут быть переопределены для оптимизации общих характеристик в когнитивном смысле. Обработка данных и состав оборудования должны привести к безопасной, надежной и мощной процедуре для распределения информации и передачи навыков.
[00232] Использование алгоритмов с автоматической оптимизацией для управления или параметризации промышленных приложений обеспечивает возможность непрерывного усовершенствования индивидуальной базы знаний. Укрепляющее обучение, например, предоставляет ряд способов, которые обеспечивают такую возможность. Эти алгоритмы основаны на исследовании пространства состояний процессов для изучения оптимальных комбинаций действия и состояния. Агент укрепляющего обучения также может быть описан простым контуром Р-С-А, в котором процесс оценки информации состояния среды является элементом контура "восприятия", изменение текущих правил управления представляет часть "действия", и процесс преобразования предполагаемой информации состояния в новые правила управления дает секцию "познания" одиночного контура Р-С-А. В промышленных приложениях исследование большого пространства состояний не всегда является выполнимым по различным причинам, таким как безопасность, скорость или затраты. Использование подхода многоконтурной топологии Р-С-А для распределения задачи обучения среди множества агентов способствует уменьшению количества исследований для индивидуальных агентов, в то время как объем обучающего опыта все еще остается большим. Кроме того, такой подход обеспечивает возможность обучения различных контуров Р-С-А. Возможное назначение подхода многоконтурной топологии Р-С-А состоит в комбинации множества агентов в одной системе или сборочной линии, например, контролирующем и управляющем блоке с обратной связью. Два различных агента могут быть обучены оптимизации различных параметров процесса. Комбинация обоих агентов на уровне многоконтурной Р-С-А может быть использована для нахождения оптимального пути для всех параметров.
[00233] Выделенные многоконтурные топологии Р-С-А могут улучшить технологические характеристики при установке и конфигурации времен, технологическую гибкость, а также качество. Один подход объединяет и совместно улучшает подобные рабочие станции с совместным знанием и передачей навыков. Другой подход обеспечивает возможность самоусовершенствования различных блоков с каждой обратной связью между блоками. Ниже описана система сетевая компьютерная система для когнитивных обрабатывающих устройств согласно настоящему изобретению. Преимущество настоящего изобретения состоит в том, что после того, как совместные системы получают достаточное машинное знание, они предотвращают повторные этапы конфигурации и способны в значительной степени уменьшить время простоя, а также повысить гибкость номенклатуры.
[00234] Согласно одному варианту реализации настоящего изобретения для облегчения интеграции нескольких контролирующих систем 100, предназначенных для контроля тепловой обработки, все распределенные системы соединены друг с другом посредством сети Интернет. Знание, полученное этими системами, используется совместно и, таким образом, обеспечивает возможность создания глобальной базы данных конфигураций процесса, установок датчика и эталонов качества.
[00235] Для распространения данных между машинами необходимо, чтобы все они использовали одинаковый способ извлечения признака. В качестве первого сценария для достижения этих целей с использованием когнитивных подходов обработки данных для объединения входных данных от множества датчиков соответствующих измерительных блоков 1810 контролирующей системы 100 с целью приема хорошей оценки состояния, в котором находится процесс в данный момент времени.
[00236] С использованием когнитивных способов уменьшения размерности могут быть удалены ненужные и резервные измерительные данные. Измерительные данные в уменьшенном объеме используют для классифицирования состояния процесса. Группирование обеспечивает идентификацию специализированных состояний процесса даже между различными конфигурациями. Если из ссылок обнаружено существенное различие и, следовательно, неизвестное состояние процесса, наблюдатель будет предупрежден. Затем, эксперт может изучить новое состояние и разработать контрмеры (если это возможно) для системы с целью улучшения ее характеристик.
[00237] Когнитивная разрабатываемая система должна научиться разделять приемлемые и недопустимые результаты и, кроме того, уметь по возможности предотвращать недопустимые результаты. Использование технического познания устраняет необходимость построения полной физической модели технологического процесса обработки или выпекания пищевого продукта. Система способна стабилизировать процесс путем улучшения по меньшей мере одного управляющего параметра. Распределенное познание позволяет распределить центральную базу данных между различными производственными участками. Информация, собранная из одного процесса, может быть передана подобному процессу в другом месте.


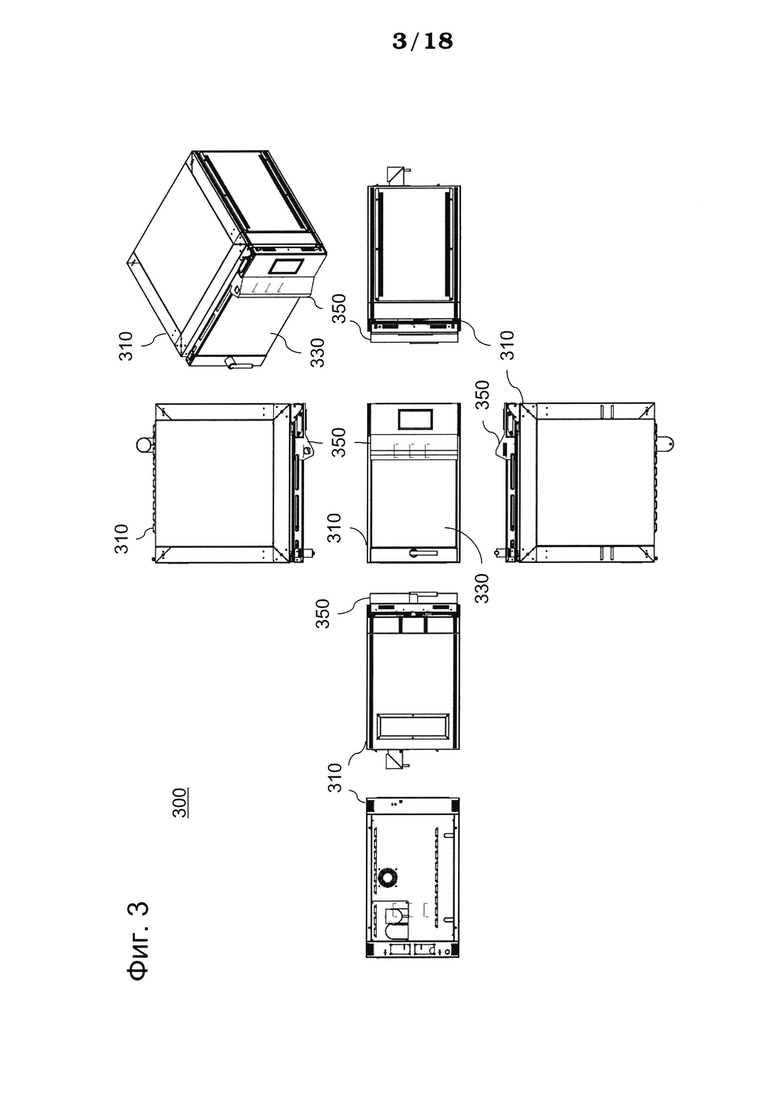
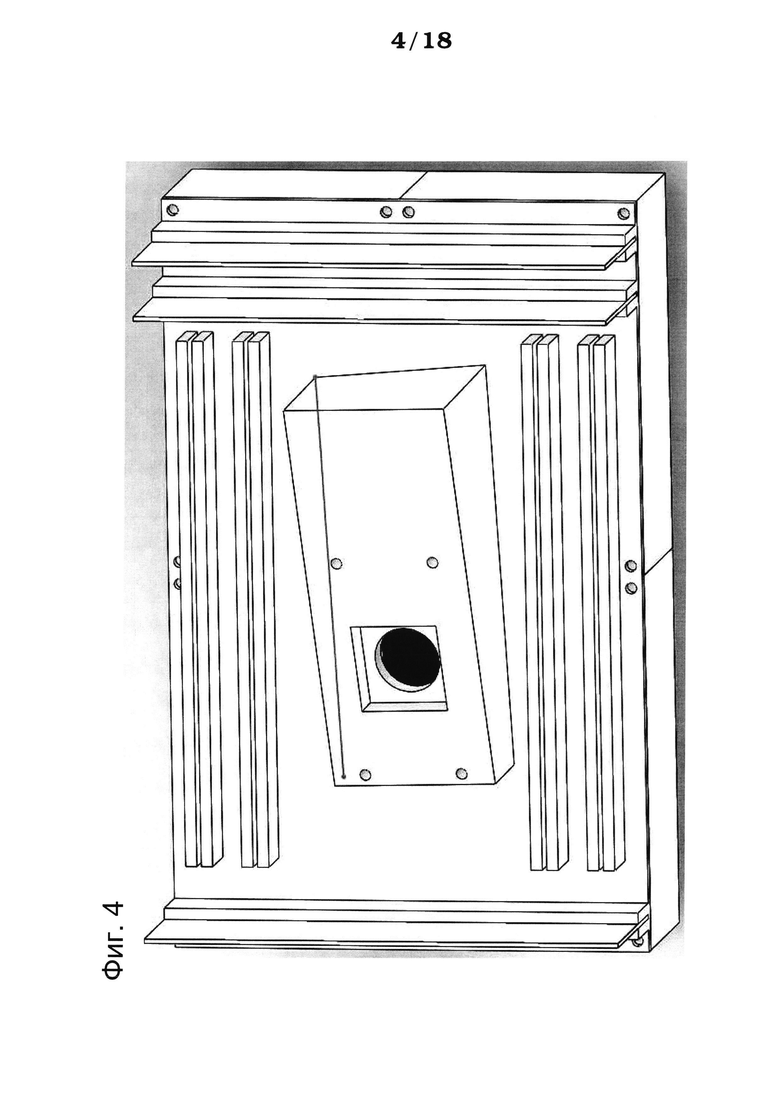
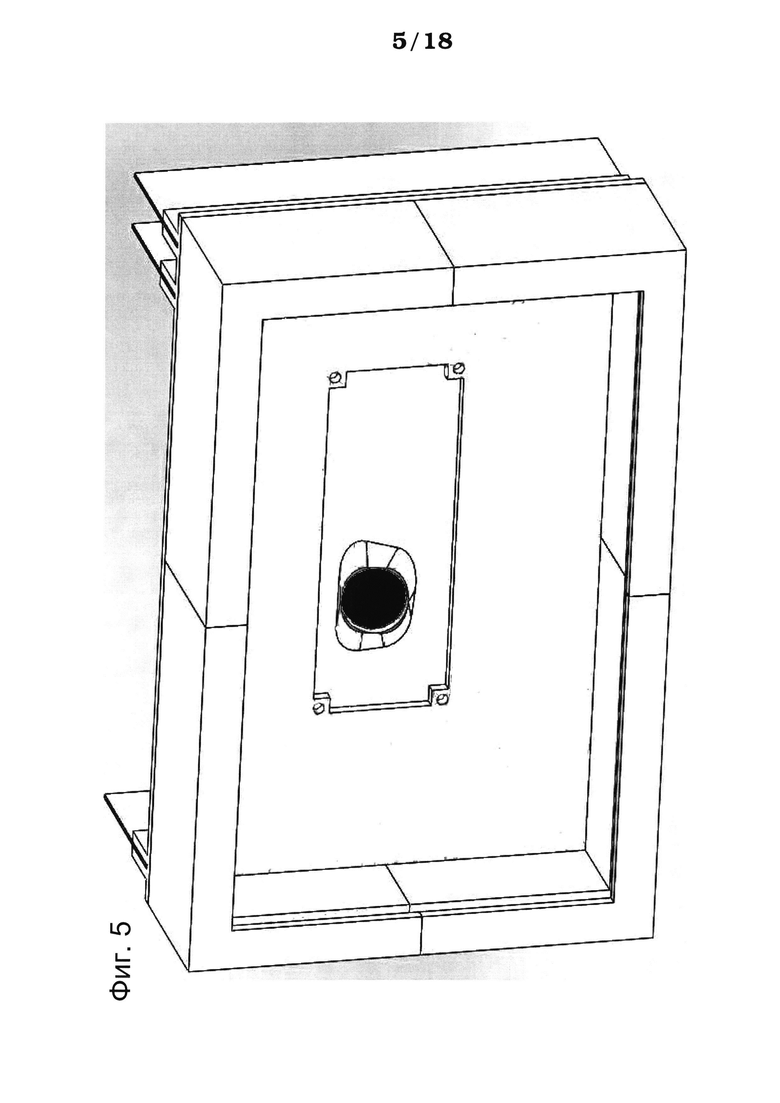
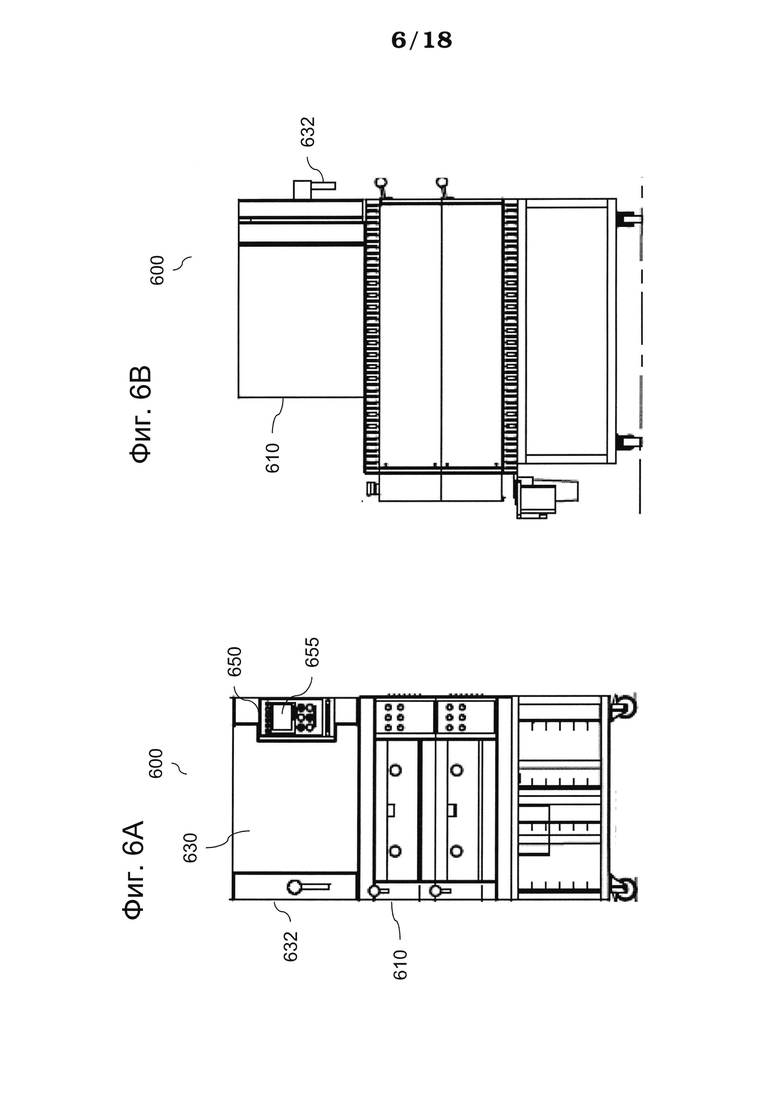
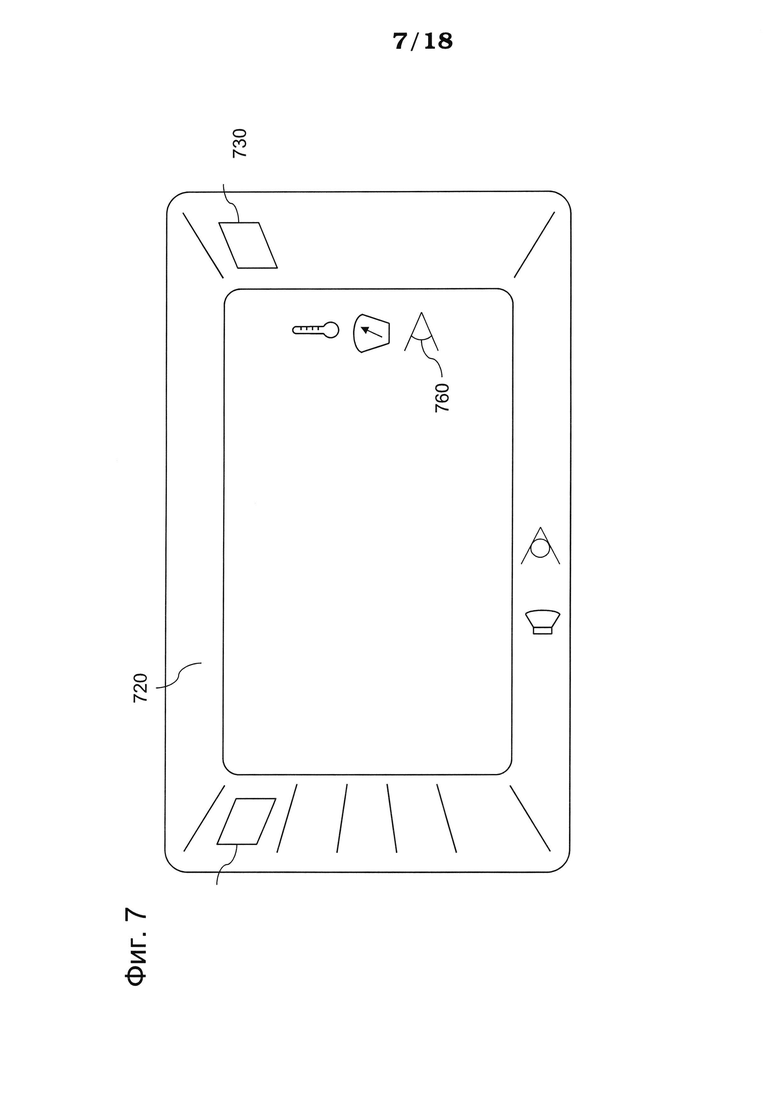
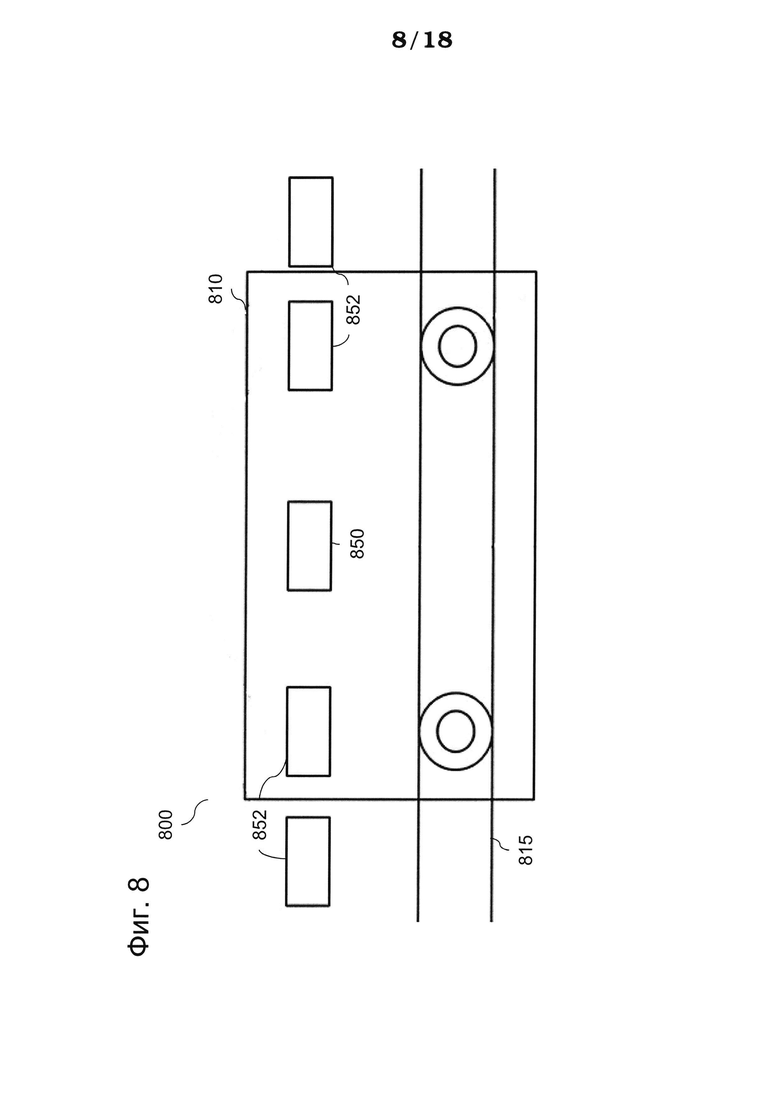
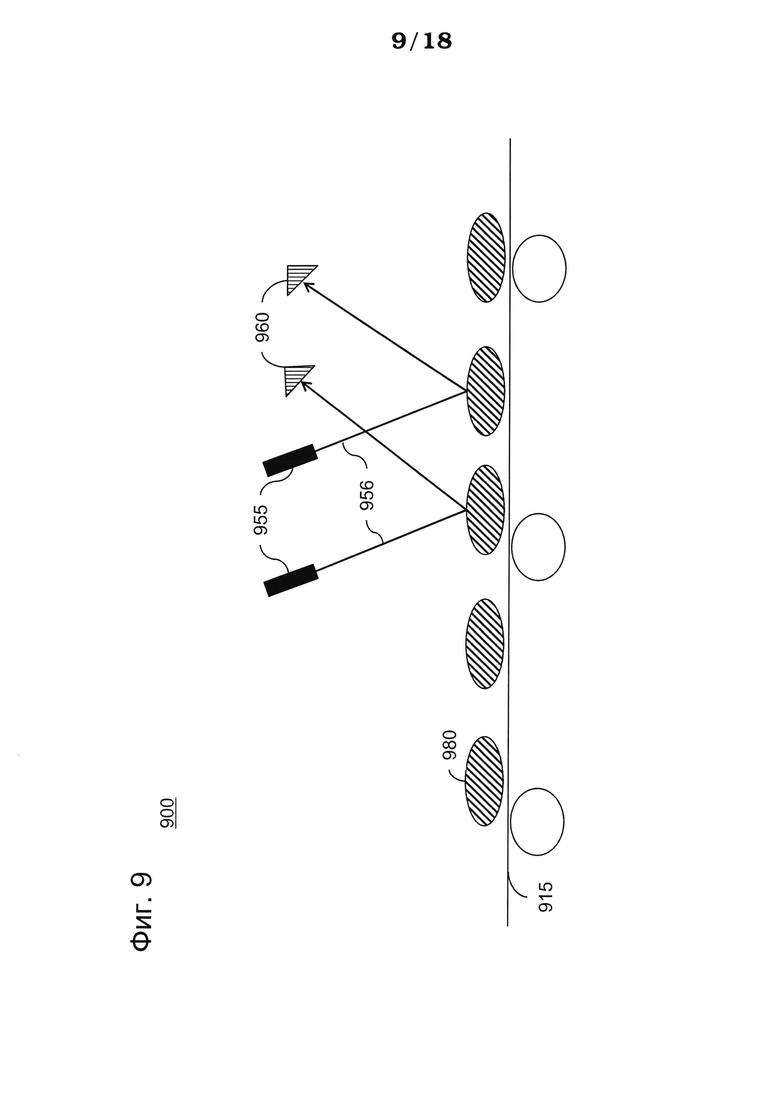

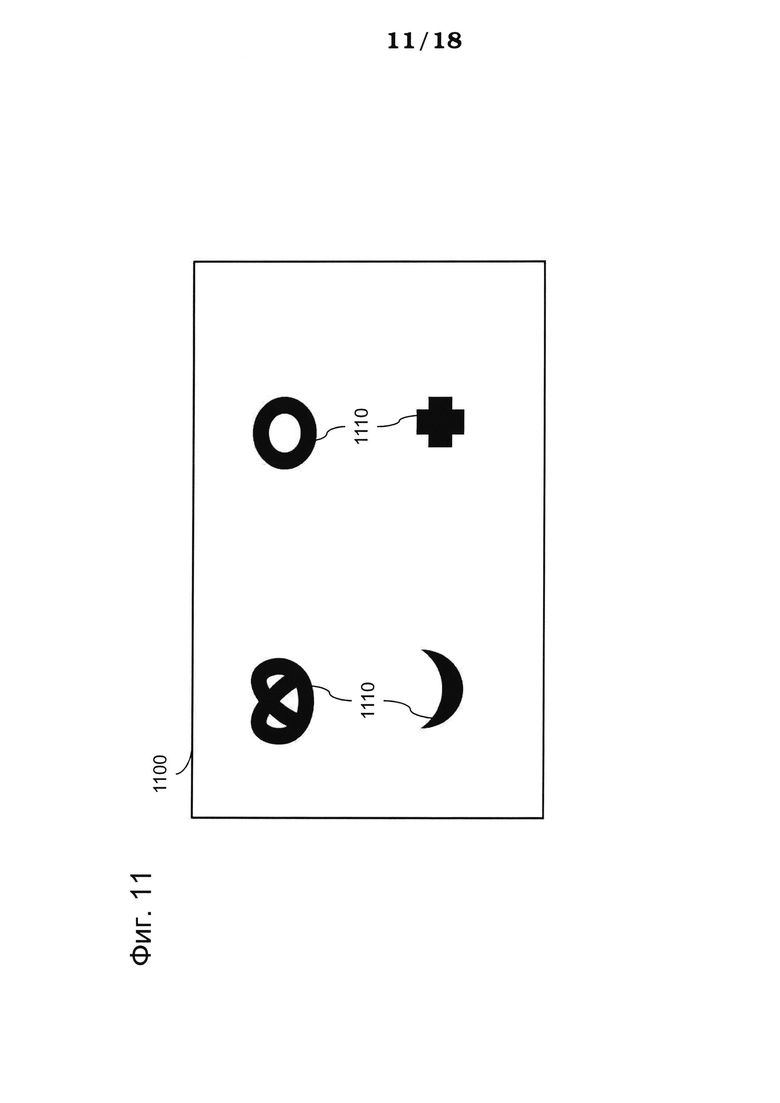
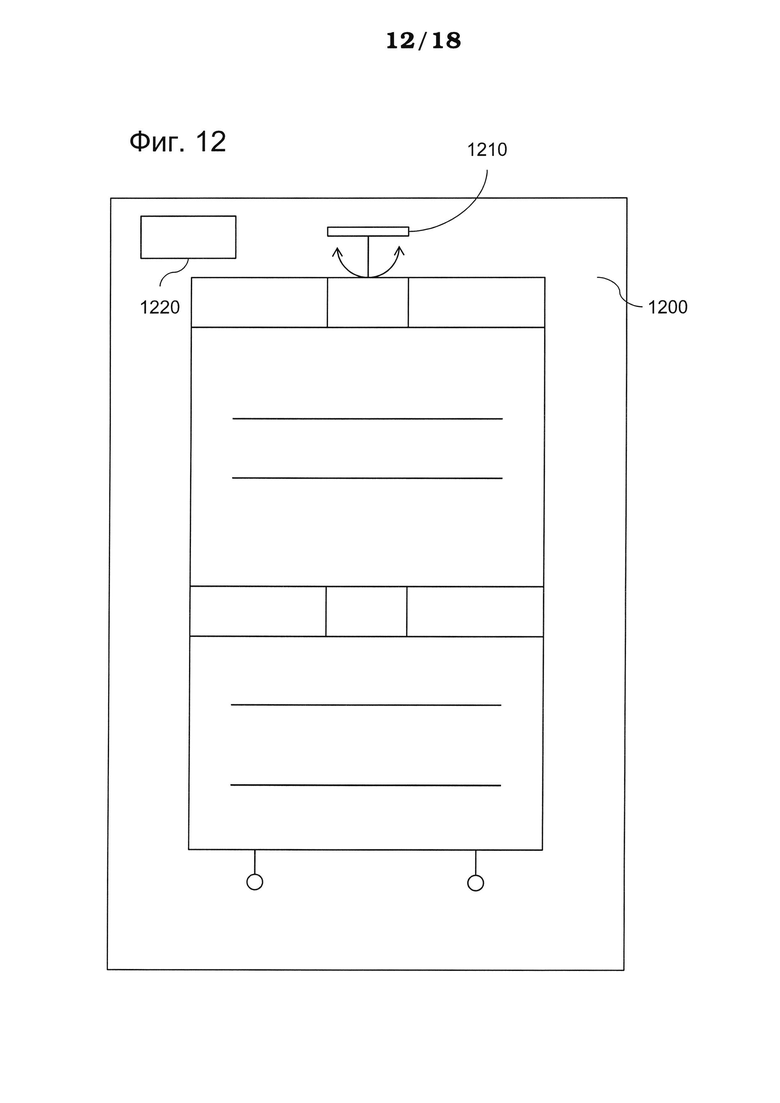

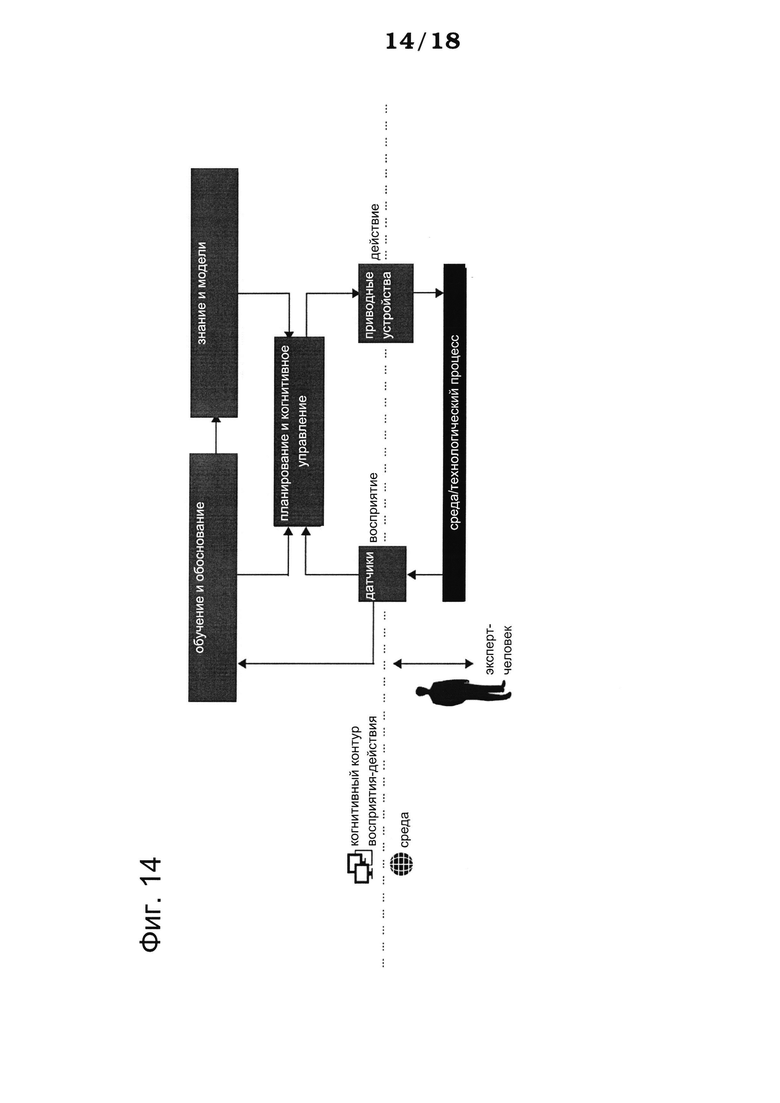

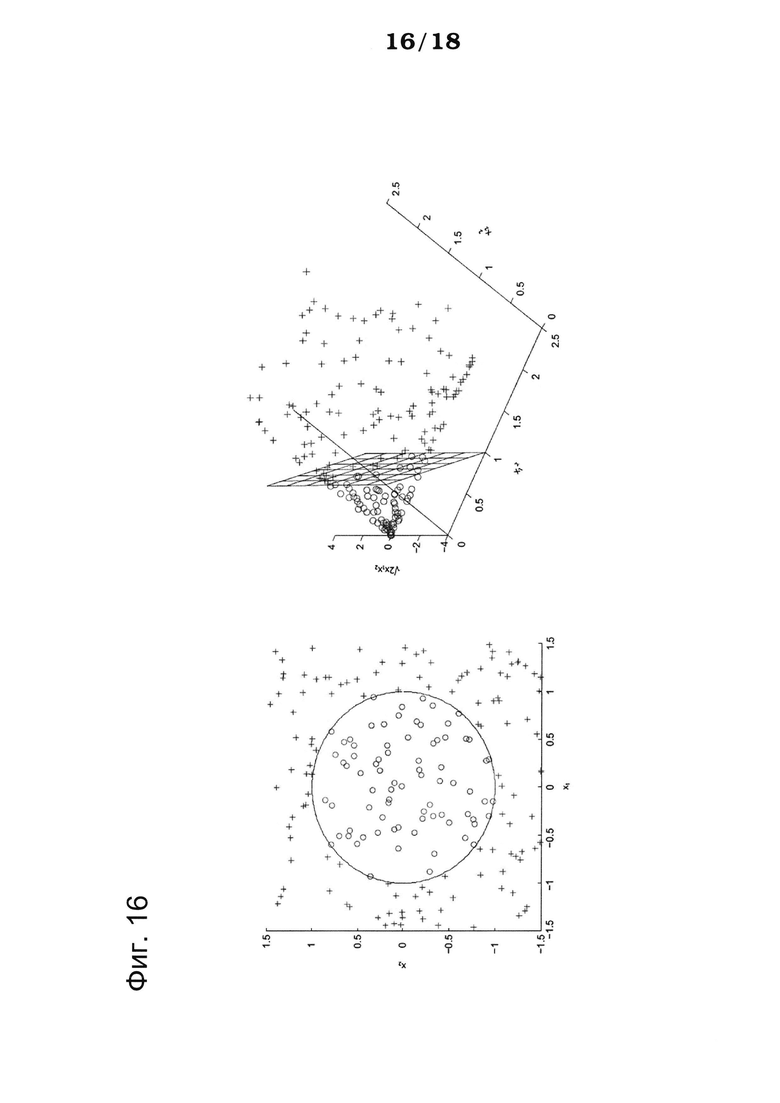
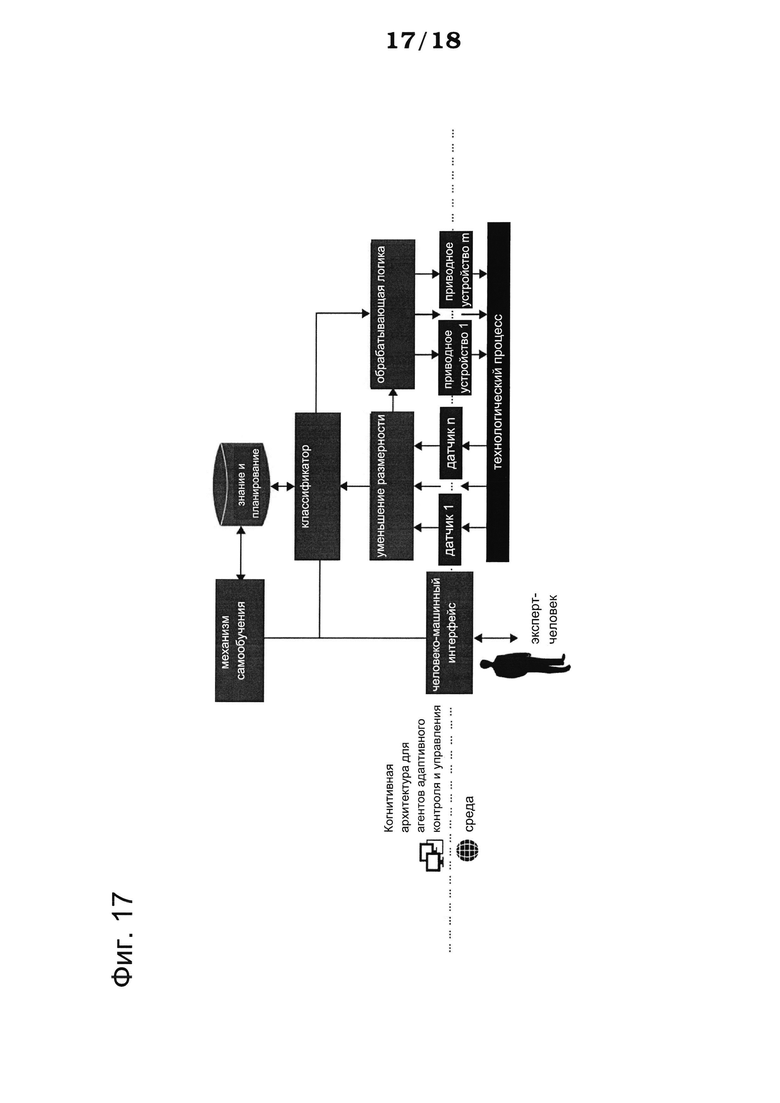
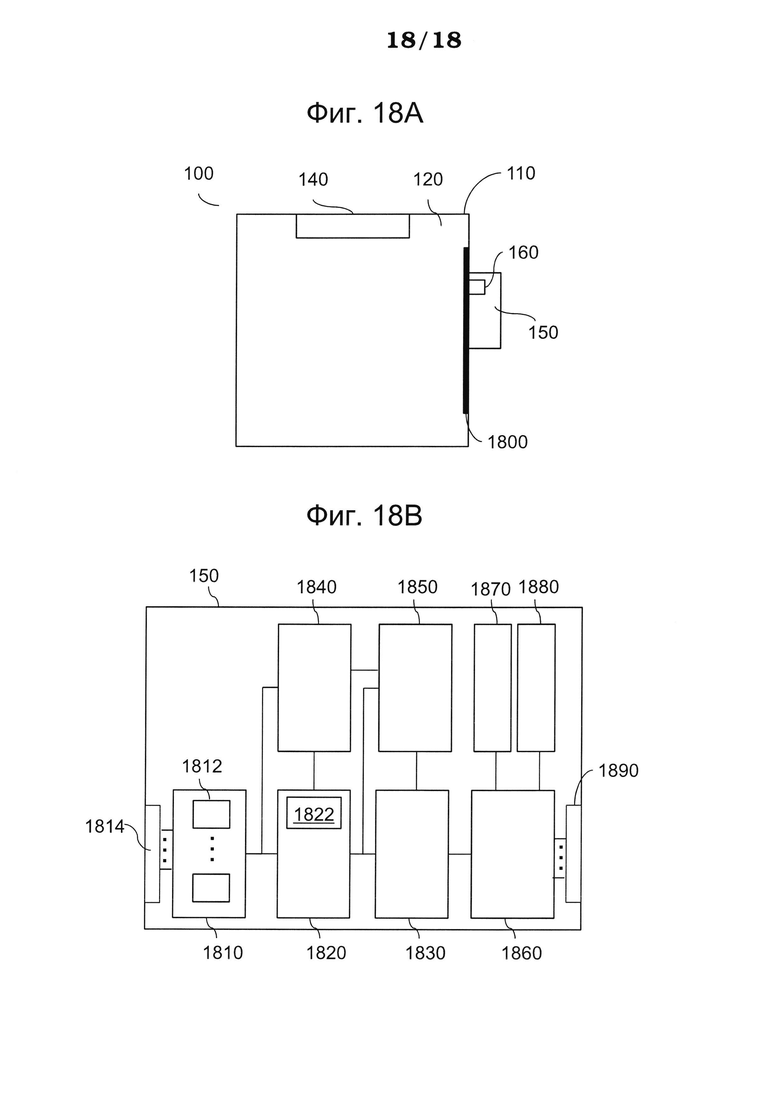
Контролирующая система включает измерительный блок, содержащий по меньшей мере один датчик для определения текущих измерительных данных о нагреваемом пищевом продукте, обрабатывающий и контролирующий блоки. Обрабатывающий блок используют для определения текущих данных о признаках из указанных текущих измерительных данных путем применения преобразования, при котором уменьшают размерность текущих измерительных данных. Измерительным данным с самой высокой дисперсией с течением времени по меньшей мере в одном обучающем процессе нагревания придают наибольший вес. Контролирующий блок выполнен с возможностью определения текущего состояния процесса нагревания в текущем процессе нагревания контролируемого пищевого продукта путем сравнивания указанных текущих данных о признаках с эталонными данными о признаках эталонного процесса нагревания. Изобретение обеспечивает автоматизацию технологических этапов обработки пищи. 15 з.п. ф-лы, 22 ил.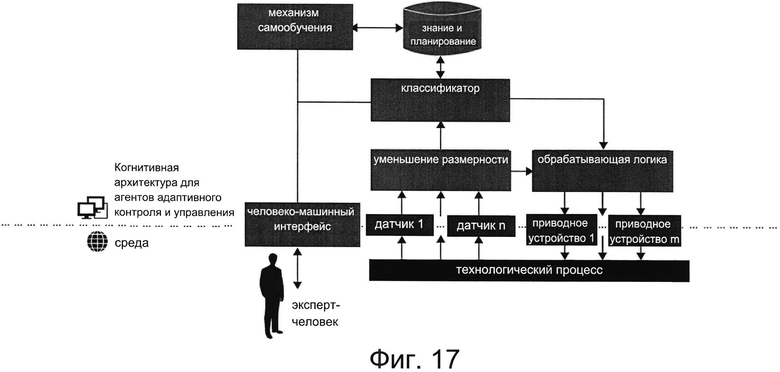
1. Контролирующая система (100) для контроля тепловой обработки, содержащая:
измерительный блок (1810), содержащий по меньшей мере один датчик (1812) для определения текущих измерительных данных о нагреваемом пищевом продукте,
обрабатывающий блок (1820) для определения текущих данных о признаках из указанных текущих измерительных данных путем применения преобразования, при котором уменьшают размерность текущих измерительных данных, причем измерительным данным с самой высокой дисперсией с течением времени по меньшей мере в одном обучающем процессе нагревания придают наибольший вес, и
контролирующий блок (1830), выполненный с возможностью определения текущего состояния процесса нагревания в текущем процессе нагревания контролируемого пищевого продукта путем сравнивания указанных текущих данных о признаках с эталонными данными о признаках эталонного процесса нагревания.
2. Контролирующая система для контроля тепловой обработки по п. 1, дополнительно содержащая:
обучающий блок (1840), выполненный с возможностью определения результата преобразования текущих измерительных данных в текущие данные о признаках и/или с возможностью определения эталонных данных о признаках эталонного процесса нагревания на основании данных о признаках указанного по меньшей мере одного обучающего процесса нагревания.
3. Контролирующая система (100) для контроля тепловой обработки по п. 2, в которой обучающий блок (1840) выполнен с возможностью определения результата преобразования текущих измерительных данных в текущие данные о признаках посредством дисперсионного анализа по меньшей мере одного обучающего процесса нагревания.
4. Контролирующая система (100) для контроля тепловой обработки по п. 3, в которой дисперсионный анализ включает по меньшей мере одно из следующего: анализ главных компонент (РСА), изометрическое преобразование признаков (алгоритм ISOMAP), линейный дискриминантный анализ (LDA) и методику уменьшения размерности.
5. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 2-3, в которой обучающий блок (1840) выполнен с возможностью определения эталонных данных о признаках эталонного процесса нагревания путем объединения заданных данных о признаках программы нагревания с обучающим набором данных о признаках по меньшей мере одного обучающего процесса нагревания, классифицируемого по предпочтению пользователя как часть указанного обучающего набора.
6. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 2-3, дополнительно содержащая записывающий блок (1822) для записи текущих данных о признаках текущего процесса нагревания, причем обучающий блок (1840) выполнен с возможностью приема записанных данных о признаках от записывающего блока (1822) для их использования в качестве данных о признаках обучающего процесса нагревания.
7. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3, в которой измерительный блок (1810) содержит видеокамеру (160), записывающую пиксельное изображение нагреваемого пищевого продукта, причем текущие измерительные данные видеокамеры соответствуют текущим пиксельным данным текущего пиксельного изображения.
8. Контролирующая система (100) для контроля тепловой обработки по п. 7, в которой текущие пиксельные данные содержат первые пиксельные данные, соответствующие первому цвету, вторые пиксельные данные, соответствующие второму цвету, и третьи пиксельные данные, соответствующие третьему цвету.
9. Контролирующая система (100) для контроля тепловой обработки по п. 8, в которой первый, второй и третий цвета соответствуют R, G и В соответственно.
10. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 8-9, в которой видеокамера (160) выполнена с возможностью генерирования обработанных пиксельных изображений в большом динамическом диапазоне (HDR) в виде текущих пиксельных данных.
11. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3 и 8-9, дополнительно содержащая классифицирующий блок (1850), выполненный с возможностью классифицирования типа пищевого продукта, подлежащего нагреву, и с возможностью выбора эталонного процесса нагревания, соответствующего указанному определенному типу пищевого продукта.
12. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3 и 8-9, дополнительно содержащая управляющий блок (1860), выполненный с возможностью переключения процесса нагревания с процесса расстойки на процесс выпекания на основании результата сравнения указанного текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания.
13. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3 и 8-9, дополнительно содержащая управляющий блок (1860), выполненный с возможностью управления отображающим блоком (1880), который выполнен с возможностью индикации оставшегося времени процесса нагревания на основании результата сравнения текущего состояния процесса нагревания, определенного контролирующим блоком, с заданным состоянием процесса нагревания, соответствующим конечной точке нагрева, и/или с возможностью отображения изображений внутренней части камеры для тепловой обработки.
14. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3 и 8-9, дополнительно содержащая управляющий блок (1860), выполненный с возможностью предупреждения пользователя о времени, когда должен быть завершен процесс нагревания.
15. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3 и 8-9, дополнительно содержащая управляющий блок (1860), выполненный с возможностью управления терморегулятором нагревающей камеры, средства для регулирования влажности в камере для тепловой обработки путем добавления воды или пара, устройство управления вентиляционным механизмом, средства для регулирования скорости вентилятора, средства для регулирования разности давлений между камерой для тепловой обработки и соответствующей средой, средства для задания кривой изменения температуры в зависимости от времени в камере для тепловой обработки, средства для выполнения и регулирования различных процедур тепловой обработки, таких как расстойка или выпекание, средства для регулирования профилей внутренних газовых потоков в камере для тепловой обработки, средства для регулирования интенсивности электромагнитного и звукового излучений соответствующих электромагнитных или звуковых излучателей для исследования или наблюдения свойств подлежащего нагреву пищевого продукта.
16. Контролирующая система (100) для контроля тепловой обработки по любому из пп. 1-3 и 8-9, в которой по меньшей мере один датчик (1812) измерительного блока (1810) содержит по меньшей мере одно из гигрометра, датчика температуры загрузки, датчика температуры обрабатывающей камеры, акустических датчиков, весов, таймера, видеокамеры, датчика изображений, матрицы фотодиодов, анализатора газа в обрабатывающей камере, средства для определения температурных профилей датчиков температуры загрузки, средства для определения электромагнитного или акустического излучения технологического облучения подлежащего обработке пищевого продукта, такого как свет или звук, отраженные или излученные в ответ на световые или звуковые излучатели или источники, средства для определения результатов объемных измерений подлежащего нагреву пищевого продукта, включая системы объемной или стерео видеокамеры или радара, или средства для определения типа, или состава, или шаблона, или оптических характеристик, или объема, или массы подлежащего обработке пищевого продукта.
| DE 102010016651 A1, 27.04.2010 | |||
| JP 2001330257 A, 30.11.2001 | |||
| Устройство для очистки остекления зданий | 1988 |
|
SU1595453A1 |
| EP 0701387 A2, 13.03.1996 | |||
| US 2006112833 A1, 01.06.2006 | |||
| DE 102008009660 A1, 27.08.2009 | |||
| Состав для конструкционного изоляционного материала | 1974 |
|
SU563698A1 |
| US 6080972 A, 27.06.2000 | |||
| US 5786568 A, 28.07.1998 | |||
| RU 2002113288 A, 10.11.2003. | |||

