Изобретение относится к геодезии и навигации и, в частности, предназначено для определения координат объекта и элементов внешнего ориентирования относительно взлетно-посадочной палубы авианосца.
Известен способ посадки самолета, в котором радиотехническими средствами формируют в пространстве курсовую и глиссадную условные линии, проекции которых совпадают с продольной осью взлетно-посадочной полосы (ВПП), измеряют угловые отклонения самолета от курсовой и глиссадной линии, минимизируют эти отклонения путем управления боковым и продольным движениями самолета в процессе снижения по глиссаде, после чего посадку осуществляют визуально, наблюдая огни светотехнического оборудования аэродрома [1. Кассии Ю.Г. и др. «Автоматическое управление самолетом при заходе на посадку». Рига, Институт инженеров ГА, 1979; 2. Белогородский С.Л. «Автоматизация управления посадкой самолета». Москва, Транспорт, 1972].
Основными недостатками, препятствующими достижению требуемого технического результата при использовании данного способа, являются сложность и большая стоимость радиосветотехнического оборудования аэродрома, значительная площадь летного поля, влияние радиопомех, создаваемых взлетающими и выруливающими самолетами, а также объектами на местности, от которых происходит переотражение радиосигналов. Значительные помехи вызывают также неблагоприятные метеоусловия (грозы, туманы, осадки). Кроме того, автоматическое управление самолетом осуществляется только на этапе его снижения по глиссаде и отсутствует на этапе выравнивания, что уменьшает безопасность посадки.
Известны способы визуальной посадки самолета, в которых управление боковым и продольным движениями самолета осуществляют, наблюдая либо цвета, либо периодичность появления, либо скорость перемещения в пространстве лучей света, направляемых из точки посадки в сторону заходящего на посадку самолета. При этом о местоположении самолета на линии глиссады или курса судят по наблюдению луча одного определенного цвета, либо по интенсивности излучения источников света, либо по совмещению источников света, либо по отсутствию перемещения лучей в пространстве [Б.Л. Перри. «Оптические навигационные системы: анализ, разработка и развитие». Сводный отчет Морской исследовательской лаборатории об исследованиях ночной посадки самолетов на авианосцы. МО СССР, перевод 12, 1970; Патенты США: N 4.554.543, Н. кл. 340-948, 1983 г.; N 3.581.275, Н. кл. 340-25, 1971 г.; N 3.500.306, Н. кл. 340-25, 1970 г.; N 5.136.288, М. кл. B64F 1/18, 1992 г.; Патент ФРГ N 3107377, М. кл. B64F 1/18,1987 г.; АС СССР N 726794, М. кл. B64F 1/18, 1992 г.].
Причины, препятствующие достижению требуемого технического результата при использовании визуальных способов посадки, состоят в том, что они неработоспособны в сложных метеоусловиях (сильный туман, низкая плотная облачность и т.п.), не обеспечивают достаточную точность пилотирования по оптимальным глиссаде и курсу. Кроме того, точность пилотирования зависит от физиологического состояния пилота.
Известны радиотехнические способы ориентирования при заходе на посадку, в которых принимаются сигналы от установленных по периметру ВПП активных или пассивных маркеров, преобразуют их в видеосигналы, отображают в дисплее и по угловому положению отметок, отображающих контуры ВПП относительно вертикальной оси экрана дисплея, судят о направлении движения самолета относительно оси ВПП [Патент США N 4.101.893, Н. кл. 343-108, 1978 г.; Патент ФРГ N 3629911, М. кл. B64F 1/18, 1993 г.].
Недостатки данных способов, заключаются в том, что они, обеспечивая формирование видеообраза ВПП, не рассчитывают координат положения самолета относительно ВПП и не обеспечивают информационной связи с системой управления, что не позволяет реализовать полу- и автоматические режимы посадки. Применяемые маркеры не позволяют определять положение самолета на всех этапах посадки с точностью, необходимой для реализации автоматической посадки, особенно в процессе выравнивания.
Известен способ автоматического управление самолетом на этапе посадки, который основан на определении местоположения самолета относительно посадочной полосы путем трехканального приема и совместной цифровой обработки полученных сигналов, излучаемых расположенными вдоль боковых кромок посадочной полосы маркерами в световом, инфракрасном и миллиметровом радиолокационном диапазонах длин волн. В каждом диапазоне формируют изображения совокупности маркеров, попавших в поле зрения бортового приемного устройства. Эти изображения совмещают и по взаимному расположению отметок от трех наиболее разнесенных маркеров и данным о расстояниях между ними на земле рассчитывают координаты самолета относительно ВПП, по которым формируют сигналы управления самолетом [Патент РФ №2055785, опубл. 10.03.1996 г., М. кл B64F 1/20, G08G 5/02].
Недостатками данного изобретения является невысокая точность определения координат самолета при острых углах, образованных направлениями на маркеры. Кроме того, данный способ не позволяет определять элементы ориентирования самолета (углы крена, тангажа и рысканья).
Наиболее близким по технической сущности и достигаемому результату является способ автоматической посадки самолета, включающий прием излучения от точечных световых маркеров, установленных на одной линии по оси ВПП на определенных расстояниях друг от друга, измерение углов между направлениями на маркеры, преобразование световых сигналов в электрические, пропорциональные измеренным углам, измерение высоты с помощью высотомера, формирование сигналов управления самолетом в вертикальной и горизонтальной плоскостях. При этом управление в горизонтальной плоскости осуществляют, минимизируя угол между направлениями на ближний и дальний маркеры. Для формирования сигналов управления самолетом в вертикальной плоскости последовательно измеряют углы между направлениями на соседние маркеры и высоту самолета над первым из них по ходу полета [Патент Японии N 56-112398, кл. B64D 45/08, 1981 (прототип)].
Недостатки данного способа, препятствующие достижению требуемого технического результата, заключаются в следующем:
В сложных метеоусловиях или при ярком солнечном освещении способ может оказаться неработоспособным:
1. Ha этапе выравнивания при приземлении самолета возможна потеря видимости маркеров, что не позволяет осуществить автоматическое управление посадки до конца.
2. В случае выхода из строя одного или нескольких маркеров нарушается процесс определения положения самолета относительно ВПП, что снижает точность пилотирования и, соответственно, безопасность посадки.
3. Точность управления самолетом также снижается вследствие ошибок измерения мгновенных значений высоты при пролете самолетом маркера.
4. Применение высокоточного высотомера малых высот усложняет систему и существенно увеличивает ее стоимость. Кроме того, маркеры должны быть углублены в поверхность ВПП, чтобы не мешать движению самолета после приземления. Поэтому они представляют собой сложные технические устройства, причем их видимость ограничена углами входа самолета в глиссаду, что не позволяет обеспечить всеракурсность поиска ВПП.
Недостатком данного способа и устройства является также сложность реализации непрерывного наведения узконаправленных световых пучков на отражатели при движении объекта, невысокая точность определения координат при острых (тупых) углах пространственной засечки, т.е при движении объекта на низких высотах, а также сильное ослабление или отсутствие сигнала при выпадении осадков, что затрудняет использование указанного изобретения. Кроме того, этот способ не может быть использован для определения углов крена тангажа и рысканья.
Основной задачей изобретения является высокоточное автономное определение местоположения самолета. Одним из эффективных путей повышения безопасности является повышение точности и помехозащищенности определения посадочных координат самолета и элементов ориентирования.
Целью изобретения является повышение точности определения координат и элементов ориентирования самолета и безопасности его посадки на ВПП, в том числе при неблагоприятных погодных условиях, а также снижение затрат на техническое оснащение ВПП и уменьшение радиоизлучения.
Поставленная цель достигается тем, что для определения координат и элементов ориентирования самолета используется сканирование тремя лазерными пучками нескольких полос отражателей (катафотов), которые расположены на авианосце и положение которых точно определено в связанной системе координат корабля. Плоскости сканирования лазерных пучков жестко связаны с системой координат самолета XYZ и образуют между собой углы, обеспечивающие оптимальную дальность действия и точность измерения координат относительно ВПП авианосца. Прием сигналов, отраженных от полос отражателей, осуществляют с помощью сигнальных фотоприемников и видеокамеры, поле зрения которой охватывает все поле сканирования отражательных полос. Определение координат самолета осуществляется триангуляционным методом с использованием известного расстояния между отражателями (базиса) и измеренных параллактических углов, образованных направлениями из центров сканирования на отражатели. Дальность определяется по измеренному параллактическому углу, образованному направлениями из центра сканирования на систему параллельных отражателей, образующих базисы измерений. Одновременно координаты самолета определяют фотограмметрическим методом на основе результатов измерений, полученных с помощью видеокамеры. Таким образом, координаты и элементы ориентирования самолета получают одновременно дважды на основе обработки независимых измерений, выполненных триангуляционным и фотограмметрическими методами.
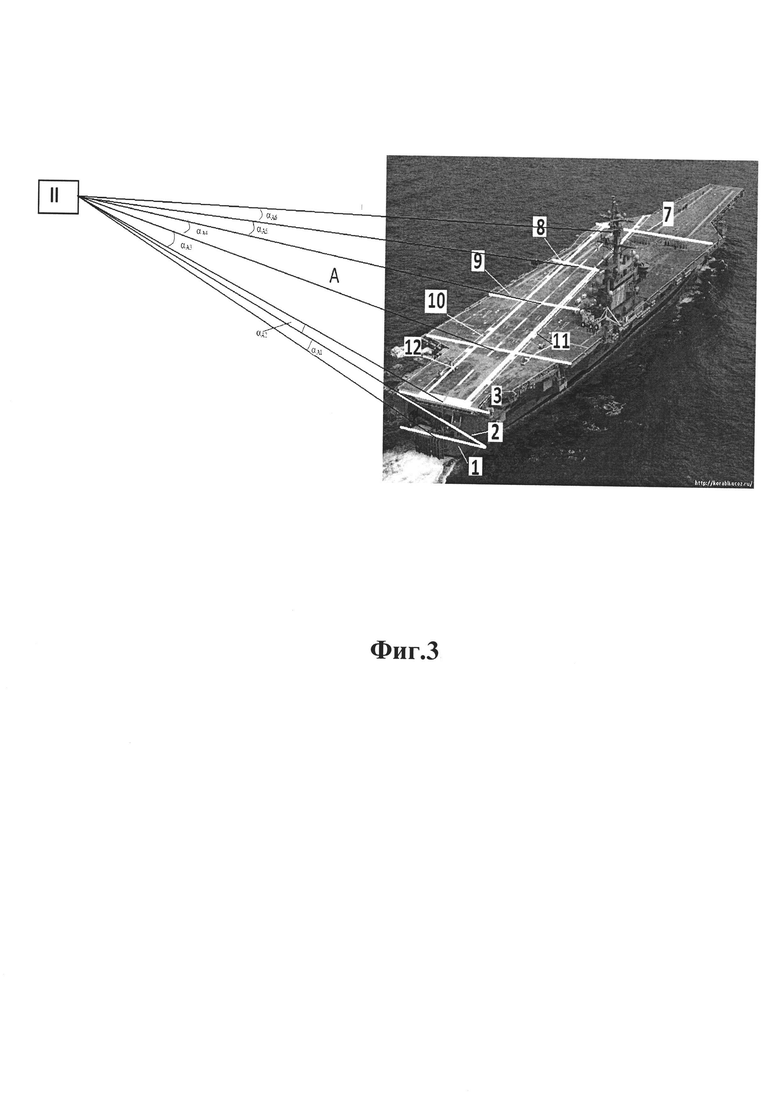
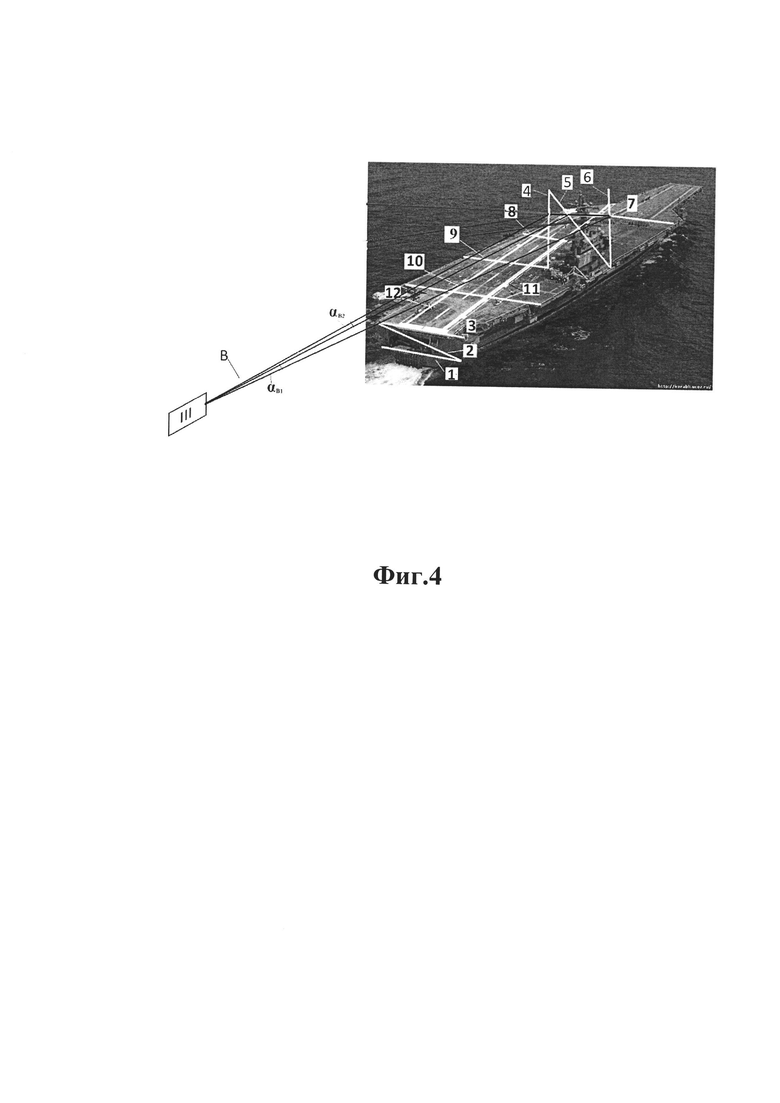
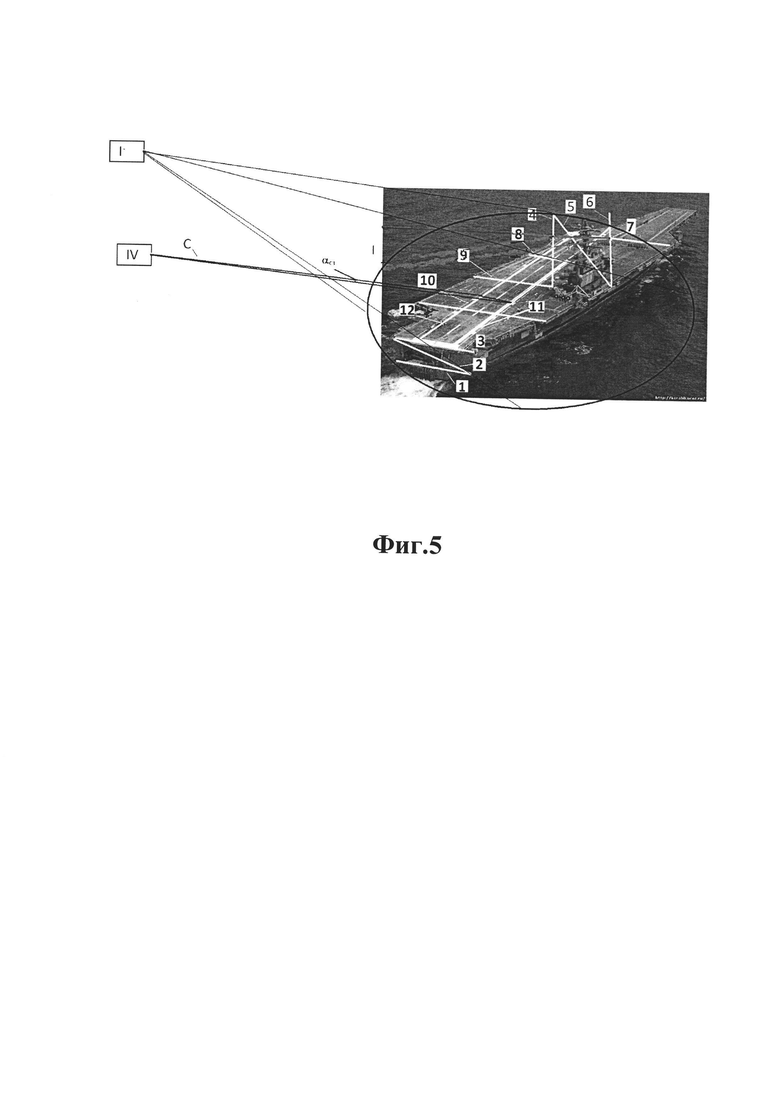
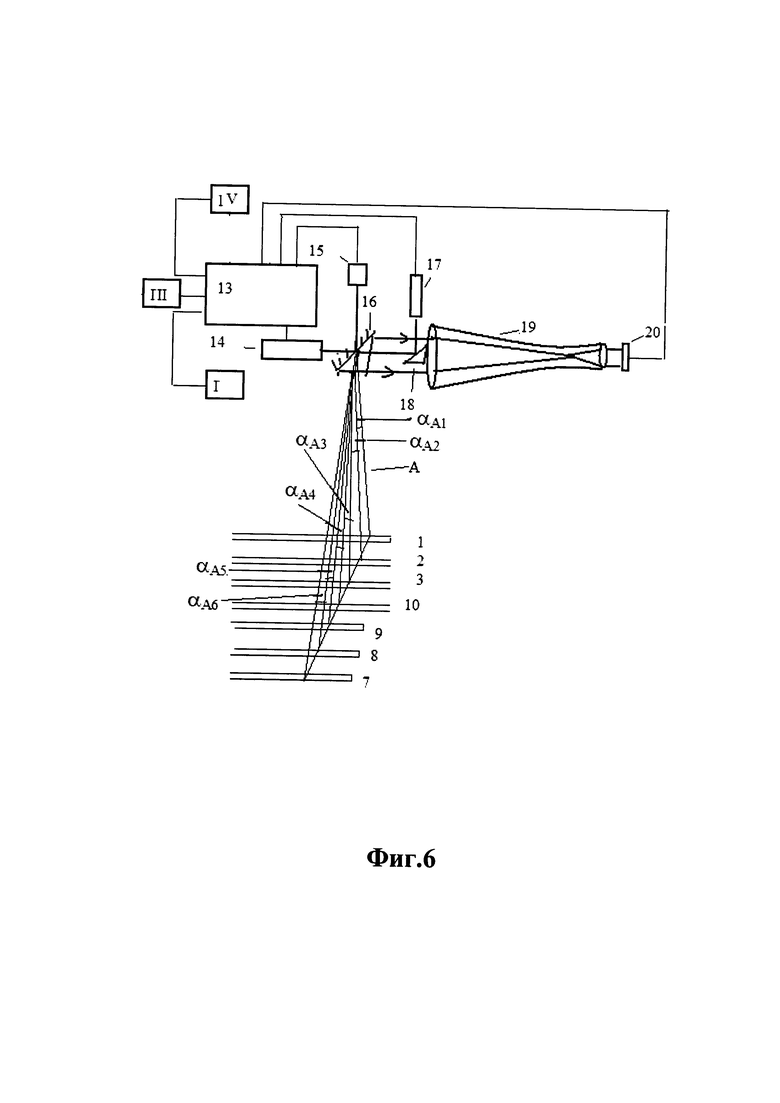
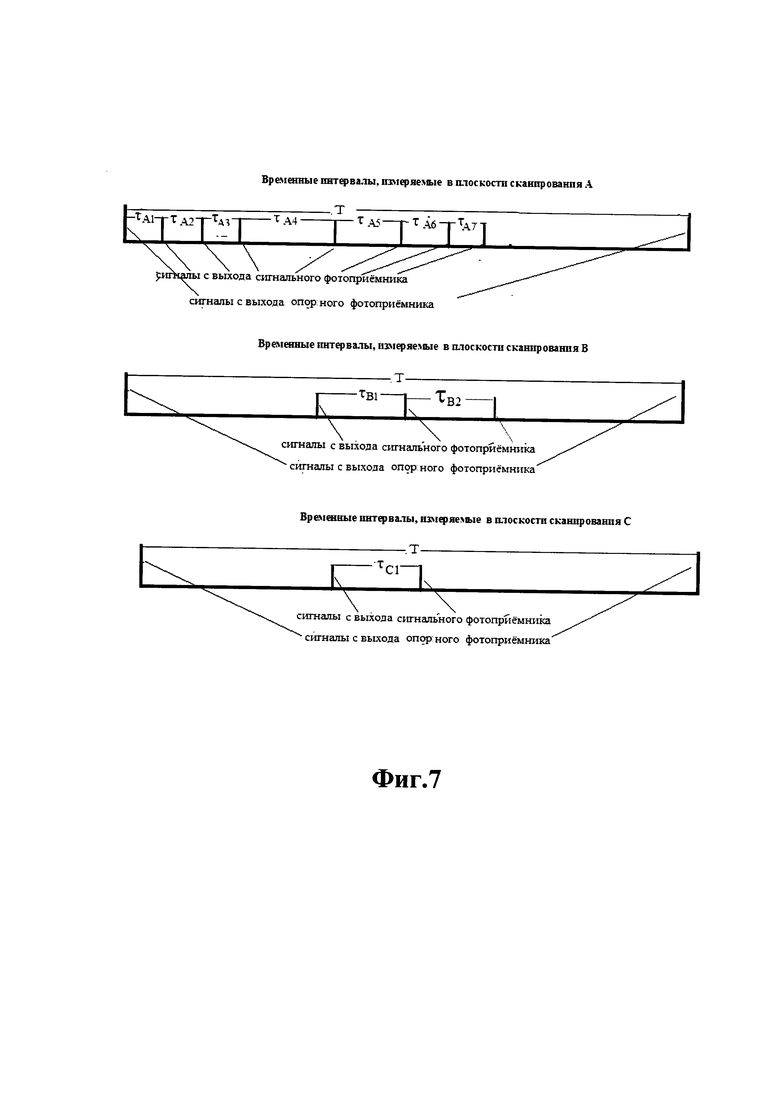
Сущность изобретения поясняется чертежами, где на фиг. 1а (вид с кормы) и фиг. 1b (вид сверху) представлен один из возможных вариантов схемы расположения отражателей на авианосце. Все отражатели с 1 по 12 выполнены в виде полос из катафота (набора микропризм и т.д.); на фиг. 2 показана блок-схема устройства определения координат и элементов ориентирования самолета, состоящая из видеокамеры I и трех идентичных сканирующих блоков II, III и IV; на фиг. 3 показана схема измерения параллактических углов αA1, αA2, αA3, αА4, αА5, αA6 в лазерной плоскости А, задаваемой сканирующим блоком II; на фиг. 4 показана схема измерения параллактических углов αB1, αB2 в лазерной плоскости В, задаваемой сканирующим блоком III; на фиг. 5 показана схема измерения параллактического угла αC1 в лазерной плоскости С, задаваемой сканирующим блоком IV; на фиг. 6 показана структурная схема сканирующего блока II; на фиг. 7 показана временная диаграмма сигналов, получаемых на выходе сигнального и опорного фотоприемников, установленных в сканирующем блоке.
Устройство выполнено следующим образом.
На фиг. 1a (вид с кормы) и фиг. 1b (вид сверху) представлен один из возможных вариантов схемы расположения отражателей на авианосце. Все отражатели (с 1 по 12) выполнены в виде полос из катафота (набора микропризм и т.д.). Отражатели 1 и 3 располагаются на корме в одной вертикальной плоскости параллельно водной поверхности и друг другу на расстоянии b1 друг от друга, а отражатель 2 - по диагонали между ними. Отражатель 3 имеет вид уголка, верхняя плоскость которого расположена на кормовой части палубы, а нижняя - на вертикальной плоскости на корме, в которой располагаются отражатели 1 и 2. Ширина отражателей соответствует размеру лазерного пятна, создаваемого сканером. Отражатели 4, 5, 6, размещены в вертикальной плоскости, которая перпендикулярна плоскости оси ВПП авианосца. Эта плоскость расположена между кормой и непосредственно перед «островом» авианосца. Отражатели 4 и 6 вертикальны и параллельны друг другу. Они установлены на расстоянии b2 друг от друга, а отражатель 5, установленный в той же вертикальной плоскости располагается по диагонали к ним. Длина (высота) отражателей 4, 5 и 6 соответствует высоте «острова». На ВПП авианосца параллельно друг другу и перпендикулярно оси ВПП установлены на одинаковом интервале отражательные полосы 3 (верхняя часть отражателя, закрепленная на корме), 7, 8, 9 и 10. Отражатели 11 и 12 установлены по краям ВПП и параллельно ее оси.
На фиг. 2 показана блок-схема устройства определения координат и элементов ориентирования самолета, которая состоит из видеокамеры I и трех идентичных сканирующих блоков II, III и IV. Предлагаемое устройство установлено на борту самолета и определенным образом ориентированно относительно связанной системы координат самолета (XYZ). Лазерные плоскости А, В и С создаются сканирующими блоками II, III и IV путем развертки лазерных лучей с постоянной угловой скоростью ω.
Лазерная сканирующая плоскость А, задаваемая сканирующим блоком II, параллельна (вертикальной) плоскости YOZ самолета и пересекает отражательные полосы отражателей 1, 2, 3, 7, 8, 9, 10 (фиг. 3) в точках, направления на которые из центра сканирования образуют параллактические углы αA1, αA2, αA3, αА4, αА5, αA6.
Лазерная сканирующая плоскость В, задаваемая сканирующим блоком III (фиг. 4), лежит в плоскости, параллельной плоскости XOZ и пересекает отражатели 4, 5 и 6 по горизонтальной линии.
Сканирующая плоскость С, задаваемая блоком IV (фиг. 5), лежит под острым углом к плоскости XOZ, величина которого зависит от угла наклона глиссады и положения точки приземления на палубе авианосца. Этот угол задается таким образом, чтобы при снижении самолета по глиссаде сканирующая плоскость С пересекала отражатели 11 и 12, установленные по краям ВПП параллельно друг другу и оси ВПП. Эта линия пересечения, создаваемая сканирующей плоскостью, перпендикулярна оси ВПП и проходит рядом с кормой параллельно отражателю -3 (а также параллельно отражателям 7, 8, 9 и 10).
Видеокамера I установлена относительно трех сканирующих блоков таким образом, чтобы во время нахожденния самолета на глиссаде в ее поле зрения, показанное на фиг. 5 в виде овала, всегда находились все облучаемые отражатели, установленные на борту авианосца.
На фиг. 6 показана структурная схема одного из сканирующих блоков - блока II (блоки II, III и IV идентичны), который как и два других сканирующих блока и видеокамера I подключены к электронному блоку 13.
Каждый сканирующий блок содержит электродвигатель 14, на выходном конце вала которого закреплено сканирующее зеркало 16, а против центра сканирования установлен опорный фотоприемник 15. Излучатель 17, содержащий лазер и коллимирующую систему, установлен против прямоугольной призмы 18, отражающей луч на сканирующее зеркало 16.
Сканирующая плоскость А, создаваемая лазерным лучом, пересекает отражатели 2, 3, 7, 8, 9 и 10, установленные на ВПП авианосца (сканирующие плоскости В и С и места их пересечения с отражателями на фиг. 6 не показаны). Линии пересечения сканирующей плоскости А с отражателями образуют параллактические углы αA1, αA2, αA3, αА4, αА5, αA6. Телескопическая система 19 служит для приема отраженных сигналов от отражателей. Против окуляра телескопической системы установлен сигнальный фотоприемник 20, который подключен к электронному блоку 13. К электронному блоку 13 также подключены электродвигатель 14, опорный фотоприемник 15, сигнальный фотоприемник 20 и излучатель 17.
На фиг. 7 показана временная диаграмма сигналов, получаемых на выходе сигнального и опорного фотоприемников, установленных в сканирующем блоке. Т - временной интервал между импульсами с опорного фотоприемника, который соответствует периоду сканирования. Временные интервалы τAi, τBi, τCi, между импульсами с сигнальных фотоприемников, установленных в сканирующих блоках II, III и IV, соответствуют измеряемым параллактическим углам, образованным направлениями из центра развертки на отражатели в плоскостях сканирования А, В, С.
Согласно предлагаемому способу развертка лазерных лучей осуществляется с постоянной угловой скоростью ω. За каждый период сканирования T (фиг. 7) в каждой плоскости сканирования определяют параллактические углы α на отражатели, которые вычисляют с учетом временных интервалов τ между импульсами, отраженными от полос отражателей:
Одновременно осуществляется редуцирование полученных результатов за счет контроля угловой скорости сканирования путем вычисления ее значения за текущий период:
По измеренным параллактическим углам в трех плоскостях сканирования и базисам b (расстояниям) между параллельными полосами отражателей с учетом углов между плоскостями сканирования, заданными конструктивно, определяют триангуляционным методом прямоугольные координаты самолета и элементы ориентирования (углы крена, тангажа и рысканья).
Устройство для определения координат самолета на этапе посадки работает следующим образом.
При включении устройства (фиг. 6) излучатель 17 каждого из сканирующих блоков (II, III и IV) генерирует лазерный луч, который после отражения от призмы 18 попадает на вращающееся зеркало 16, установленное на выходном конце вала электродвигателя 14, подключенного к электронному блоку 13. Зеркало 16 вращается с постоянной угловой скоростью и периодически облучает отражатели от 1 до 12, установленные на авианосце (фиг. 3, фиг. 4, фиг. 5), а также опорный фотоприемник 15. Частота сканирования может составлять сотни и даже тысячи Гц. (Согласно требованиям IKAO частота измерений должна быть 10 Гц.) Отраженные световые сигналы возвращаются на вращающееся зеркало 16 и поступают на вход оптической системы (телескопа) 19 и затем на сигнальный фотоприемник 20. Сигнальный 20 и опорный 15 фотоприемники подключены к электронному блоку 13, который усиливает, формирует и обрабатывает сигналы с фотоприемников всех сканирующих узлов.
Параллактические углы αi на отражатели вычисляют по временным интервалам τi; между измеренными импульсами и угловой скорости сканирования ω (формулы 1…9). В свою очередь угловую скорость сканирования вычисляют по измеренному периоду сканирования (формула 10). Используя значения базиса b (заданного расстояния между отражательными полосами) и измеренных параллактических углов, а также учитывая заданные конструктивно углы между сканирующими плоскостями А, В и С, вычисляют триангуляционным методом координаты XYZ и элементы ориентирования (углы крена, тангажа и рысканья) самолета на этапе посадки (взлета). Результаты математического моделирования показывают, что при точности измерения параллактических углов порядка 1 (одной) угловой минуты (что сравнительно легко достижимо) точность определения элементов ориентирования составляет также порядка 1 (одной) угловой минуты, а определения координат X, Y (высоты и отклонения от оси ВПП) порядка 3 см. Точность определения Z (расстояния до точки приземления) составляет 0,5 м и повышается с приближением к точке приземления.
Определение координат летательного аппарата с помощью видекамеры (фиг. 1) выполнятся точкам отражательных полос, облучаемым в момент сканирования лазером. Эти облучаемые точки фиксируются видекамерой (фиг. 2) Обработка результатов измерений осуществляется фотограмметрическими методами. Обычно частота съемки с помощью видекамеры характеризуется величиной 25 Гц и более, что отвечает требованиям IKAO. На этапе глиссады (т.е. при удалнении от авианосца 1 км и менее) координаты самолета определяют с точностью до нескольких см, а углы ориентирования с точностью порядка 1 мин. Расстояние до точки приземления определяется с точностью порядка 0,5 м.
Так как начало глиссады для боевых самолетов находится на расстоянии порядка 1 км, а угол глиссады составляет 4,5 км, то при точности измерения параллактических углов порядка 1 (одной) угловой минуты, что технически легко достижимо. В этом случае точность измерения текущих координат самолета над палубой авианосца составляет единицы см, а углов крена, тангажа и рысканья - единицы угловых минут. Так как определение расстояний осуществляется параллактическим способом по известному расстоянию (базису) между отражателями, то точность измерения расстояний до точки приземления снижается пропорционально расстоянию, и, если над палубой она составляет единицы см, то на удалении 1 км, т.е. в начале глиссады составляет 10 м. Так как в момент движения самолета по глиссаде лазерный пучок проходит сравнительно короткое расстояние до отражателей, то даже при плохих условиях видимости предлагаемое устройство будет работать устойчиво. Например, усилители сигнальных фотодиодов обеспечивают прием сигнала от лазера на расстоянии более 40 км при хороших условиях видимости. Поэтому подбирают мощность лазерного излучателя такой, чтобы обеспечить устойчивую работу устройства на глиссаде при видимости соответствующей III категории посадочных минимумов.
При этом для получения координат самолета не требуется никакого радиотехнического оборудования. Для повышения надежности определение координат самолета используется видеокамера. Координаты и расстояния между точками облучения отражателей при сканировании известны или могут быть вычислены. Эти же величины определяют с помощью видеокамеры и затем фотограмметричеким методом по снимку определяют координаты самолета и элементы ориентирования. Так как с помощью видеокамеры измерения выполняются с небольшого удаления от палубы авианосца (2 км и менее), то точность измерения координат самолета фотограмметрическим методом составляет также единицы см, а элементов ориентирования - единицы минут.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА ЗАЩИТЫ ГЛАЗ ОТ ОСЛЕПЛЕНИЯ | 2007 |
|
RU2369490C2 |
| СИСТЕМА ПОСАДКИ САМОЛЕТОВ | 1994 |
|
RU2086471C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ВОЗДУХА, УГЛОВ БОКОВОЙ И ВЕРТИКАЛЬНОЙ РЕФРАКЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2382985C2 |
| СИСТЕМА ЗАЩИТЫ ГЛАЗ ОТ ОСЛЕПЛЕНИЯ | 1992 |
|
RU2034324C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2007 |
|
RU2369532C2 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
Группа изобретений относится к способу и устройству для определения координат самолета при посадке на авианосец. При посадке самолета сканируют тремя лазерными пучками нескольких полос отражателей, ориентированных относительно взлетно-посадочной полосы, принимают отраженные сигналы, вычисляют координаты самолета путем обработки принятых сигналов определенным образом. Устройство для определения координат содержит лазер - формирователь сигналов, точечные световые маркеры, блок трехканального приема и обработки, видеокамеру, три сканирующих блока, расположенных определенным образом на самолете. Каждый сканирующий блок содержит излучатель, генерирующий лазерный луч, электродвигатель с закрепленным на выходном валу зеркалом, опорный и сигнальный фотоприемники, электронный блок. Обеспечивается повышение точности определения координат самолета и безопасность его посадки. 2 н.п. ф-лы, 8 ил.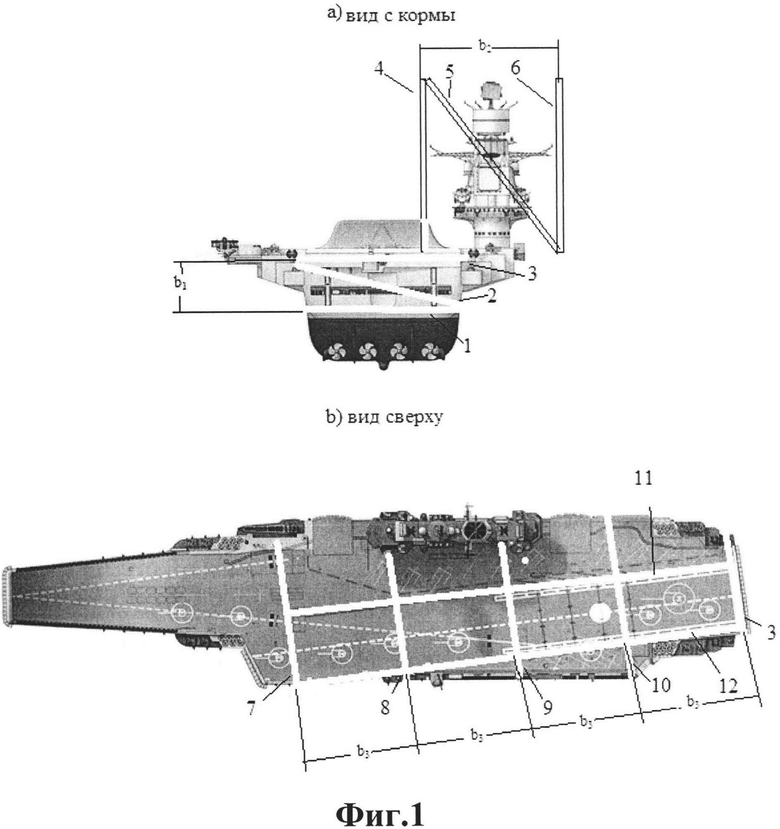
1. Способ определения координат самолета при посадке на авианосец, заключающийся в сканировании лазерными пучками отражателей, установленных на ВПП, приеме и обработке отраженных сигналов и получении координат самолета, отличающийся тем, что определяют координаты и элементы ориентирования самолета, сканируя тремя лазерными пучками нескольких полос отражателей (катафотов), которые располагают на авианосце в виде полос и ориентированных относительно ВПП, задающих измерительные базисы, при этом положение отражателей точно определяют в связанной системе координат корабля, а плоскости сканирования лазерных пучков жестко связаны с системой координат самолета XYZ и образуют между собой углы, обеспечивающие оптимальную дальность действия и точность измерения координат относительно ВПП авианосца, прием сигналов, отраженных от полос отражателей, осуществляют с помощью сигнальных фотоприемников и видеокамеры, поле зрения которой охватывает все поле сканирования отражательных полос, определение координат самолета осуществляют триангуляцией и временными интервалами между импульсами, отраженными от полос отражателей с использованием известного базиса между отражателями и измеренных параллактических углов, образованных направлениями из центров сканирования на отражатели, дальность определяют по измеренному параллактическому углу между направлениями из центра сканирования на систему параллельных отражателей, образующих базисы измерений, одновременно координаты самолета определяют фотограмметрически по результатам измерений, полученных с помощью видеокамеры, а координаты и элементы ориентирования самолета получают одновременно дважды на основе обработки независимых измерений, выполненных триангуляционным и фотограмметрическими измерениями.
2. Устройство для определения координат самолета при посадке на авианосец, включающее лазер - формирователь сигналов управления самолетом, точечные световые маркеры, блок трехканального приема и совместной цифровой обработки полученных сигналов, отличающееся тем, что в него дополнительно введены видеокамера и три сканирующих блока, закрепленные на самолете таким образом, чтобы их плоскости сканирования пересекались между собой и пересекали полосы отражателей, при этом видеокамера установлена таким образом, чтобы в ее поле зрения всегда находились облучаемые в текущий момент времени точки отражателей, каждый сканирующий блок содержит излучатель, генерирующий лазерный луч, направленный с помощью оптических элементов на сканирующее зеркало, установленное на выходном конце вала электродвигателя, а в зоне развертки которого установлены опорный и сигнальный фотоприемники, подключенные к электронному блоку.
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085447C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| US 8692691 B2, 08.04.2014 | |||
| EP 2933656 A1, 21.10.2015. | |||

