Изобретение относится к авиационной технике, в частности к аппаратуре для проведения летных испытаний летательных аппарат ов корабельного базирования (ЛАК), и предназначается для исследования и отработки систем автоматического управления (САУ) в посадочных режимах на авианосный корабль.
Известно управляющее устройство для летных испытаний дистанционно управляемого летательного аппарата (ЛА), в состав которого входят исполнительное звено для управления полетом, датчик параметров режима полета, приемник и передатчик для передачи радиосигналов к приемнику наземной станции. Радиосигналы, принимаемые приемником управляемого ЛА, используются в нем в качестве управляющих радиосигналов для исполнительного звена. В управляющем программном устройстве информация, полученная после обработки данных о режиме полета, может быть непосредственно использована для управления этим полетом. Для этого на наземной станции устанавливается устройство, предназначенное для непосредственной обработки принятого радиосигнала, а в ЛА программный исполнительный механизм для задания параметров и программы полета, в том числе для оптимизации специфичных для данного испытания режимов полета. Однако данное устройство невозможно использовать при отработке законов автоматического управления ЛАК вследствие жесткой программы при задании траектории и при малой точности определения местоположения ЛА при больших дальностях полета.
Изобретение направлено на создание системы, обеспечивающей поиск и оптимизацию общих алгоритмов замкнутого контура управления комплексом корабельной посадки в части технологии выполнения захода на посадку и посадки ЛА в условиях имитации пространственной качки корабля, имитации корабельной и бортовой аппаратуры.
Сущность изобретения состоит в том, что в летно-моделирующий комплекс (ЛМК) исследования посадочных систем летательных аппаратов корабельного базирования, включающий бортовую часть, содержащую систему автоматического управления с информационными датчиками углового и линейного положения летательного аппарата и сервоприводами, взаимосвязанную с линией передачи сигналов управления (ЛПСУ), и наземную часть, содержащую линию передачи сигналов управления, устройство отображения информации, вычислитель динамики полета летательного аппарата и контрольно-записывающую аппаратуру, в бортовую часть введен курсоглиссадный радиоприемник, подключенный к системе автоматического управления, а в наземную часть введены посадочная радиолокационная станция ((ПРЛС), связанная с соответствующим вычислителем, вычислитель команд управления, взаимосвязанный с линией передачи сигналов управления, последовательно соединенные вычислитель модели возмущений и качки, вычислитель-экстраполятор качки, вычислитель вертикальной скорости качки корабля и логическое устройство запрета посадки, выход которого соединен с вторым входом вычислителя команд управления и с оптической системой посадки (ОСП), последовательно соединенные блок вычисления критериев качества и блок вычисления экспертной системы, выход которого подключен к первому входу устройства отображения информации, последовательно соединенные вычислитель программных траекторий, первый вход которого соединен с вторым выходом вычислителя-экстраполятора качки корабля, вычислитель внешнетраекторного оптического измерителя и внешнетраекторный оптический измеритель, связанный с оптической системой посадки, курсовой и глиссадный радиомаяки, телевизионная информационно-измерительная система (ТИИС), соединенные соответственно с тремя входами вычислителя программных траекторий, измеритель метеорологических параметров, выход которого соединен с первым входом вычислителя модели возмущений и качки корабля, регистрирующая фотоаппаратура авиационный фотоаппарат и два сумматора, причем первый и второй выходы вычислителя посадочной радиолокационной системы подключены соответственно к третьему входу вычислителя команд управления, четвертый вход которого объединен с входом оптической системы посадки и соединен с вторым выходом вычислителя модели возмущений и качки корабля и с первым входом первого сумматора, второй вход которого объединен с первым входом блока вычислителя траекторных критериев и с третьим входом устройства отображения информации и подключен к выходу вычислителя программных траекторий, выходы первого сумматора соединены соответственно с первым входом второго сумматора и с вторым входом логического устройства запрета посадки, третий вход которого подключен к третьему выходу вычислителя-экстраполятора качки корабля, второй и третий входы которого соединены соответственно с выходами посадочной радиолокационной системы и ее вычислителя, выход второго сумматора соединен с вторым входом вычислителя модели возмущений и качки корабля, третий выход которого соединен с посадочной радиолокационной системой, второй вход второго сумматора подключен к первому выходу вычислителя модели динамики летательного аппарата, второй и третий выходы которого соединены соответственно с вторыми входами устройства отображения информации и блока вычисления траекторных критериев, первый вход соединен с выходом линии передачи сигналов управления, а второй вход объединен с пятым входом вычислителя программных траекторий и с вторым входом блока вычисления траекторных критериев и подключен к второму выходу вычислителя вертикальной скорости качки, третий вход блока вычисления траекторных критериев объединен с четвертым входом устройства отображения информации и подключен к первому выходу вычислителя модели возмущений и качки корабля, а второй выход соединен с пятым входом устройства отображения информации, выход которого соединен с контрольно-записывающей аппаратурой.
Доказательство существенности отличительных признаков вытекает из достаточности введения измерительных и вычислительных блоков и устройств и связей между ними, которые в совокупности решают поставленную задачу. Задача заключается в поиске и оптимизации общих алгоритмов замкнутого контура управления комплексом корабельной посадки в части технологии выполнения захода на посадку и посадки ЛА в условиях имитации пространственной качки корабля, имитации отказов корабельной и бортовой аппаратуры, включая конфликтные ситуации, сопряжение траекторий, задаваемых различными информационными средствами.
Введение ПРЛС, ЛПСУ, блока экстраполятора качки, вычислителя модели возмущений и качки корабля, вычислителя модели контура ЛА и САУ, вычислителя вертикальной скорости качки корабля, блока вычисления траекторных критериев, внешнетраекторного измерителя, ТИИС, ОСП, курсового и глиссадного радиомаяков, средств фоторегистрации траекторий ЛА, измерителя метеорологических данных и связей между ними позволяет достичь в сравнении с прототипом положительный эффект расширение функциональных возможностей моделирования посадки на авианосный корабль в сложных гидрометеоусловиях и при качке корабля за счет отработки законов управления САУ в указанных условиях.
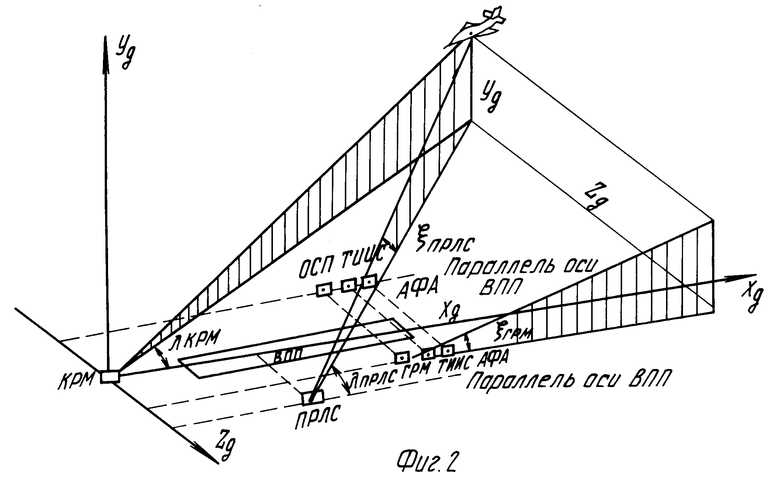
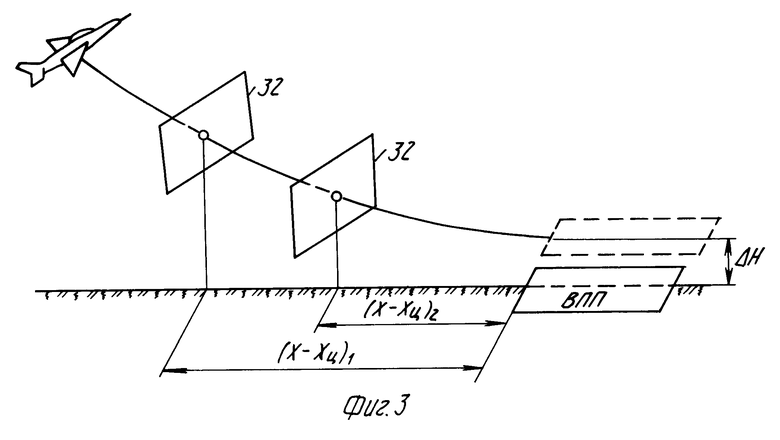
На фиг. 1 приведена принципиальная блок-схема предлагаемого ЛМК; на фиг. 2 схема размещения посадочного оборудования; на фиг. 3 моделируемая траектория и контрольные сечения при моделировании относительного движения ЛА и взлетно-посадочной полосы (ВПП).
На фиг. 1 показаны бортовая часть ЛМК 1, система 2 автоматического управления (САУ), линия 3 передачи сигналов управления (ЛПСУ), бортовой курсоглиссадный приемник 4.
Наземная часть ЛМК включает регистрирующую авиафотоаппаратуру (АФА) 5, внешнетраекторный оптический измеритель (ВТИ) 6, вычислитель 7 ВТИ, оптическую систему 8 посадки (ОСП), ЛПСУ 9, вычислитель 10 команд управления, измеритель 11 метеорологических параметров (данных), посадочную радиолокационную систему (ПРЛС) 12, вычислитель 13 ПРЛС, вычислитель модели 14 возмущений и качки корабля, телевизионную измерительно-информационную систему (ТИИС) 15, курсовой радиомаяк (КРМ) 16, глиссадный радиомаяк (ГРМ) 17, вычислитель-экстраполятор 18 качки корабля, вычислитель 19 программных траекторий, блок 20 сумматоров, первый сумматор 21, второй сумматор 22, вычислитель 23 модели динамики летательного аппарата (ЛА) САУ, вычислитель 24 вертикальной скорости качки, логическое устройство 25, пульт 26 управления оператора, систему 27 отображения информации дисплей, экспертную систему (ЭС) 28 руководителя посадки (вычислитель), блок 29 вычисления траекторных критериев, оборудование 30 авианосного корабля, контрольно-записывающую аппаратуру (КЗА) 31, разрешенные траекторные окна 32.
Бортовая часть ЛМК 1 включает САУ 2, выход которой связан с ЛПСУ 3, а вход соединен с курсоглиссадным радиоприемником 4.
Наземная часть ЛПСУ 9 соединена с вычислителем 10 команд и вычислителем 23 модели динамики ЛА САУ. Вычислитель 10 команд управления соединен с логическим устройством "запрет" 25 и моделью 14 возмущений и качки. Выход модели 14 возмущений и качки соединен с ПРЛС 12 экстраполятором 18 качки, блоком 29 вычисления критериев и дисплеем 27, а входы с измерителем 11 метеорологических параметров и сумматором 22. Входы второго сумматора 22 суммирующего блока 20 соединены с вычислителем 23 модели динамики ЛА САУ и выходом первого сумматора 21, первый вход которого соединен с вычислителем 19 программных траекторий, второй вход с вычислителем 13 ПРЛС, а второй выход первого сумматора 21 соединен с входом логического устройства 25. Входы логического устройства 25 соединены с экстраполятором 18 качки, вычислителем 24 вертикальной скорости качки. Входы вычислителя 23 модели динамики ЛА-САУ соединены с ЛПСУ 9 и с вычислителем 24 вертикальной скорости качки, а выход с дисплеем 27 оператора. Входы блока 29 вычисления критериев соединены с вычислителем 19 программных траекторий, вычислителем 24 вертикальной скорости качки, моделью 14 возмущений и качки, вычислителем 23 модели динамики ЛА-САУ, а выход с ЭС 28 и далее с дисплеем 27 оператора, другие входы дисплея 27 соединены с вычислителем 19 программных траекторий, другой выход вычислителя 19 соединен с вычислителем 7 ВТИ, а входы с экстраполятором 18 качки, вычислителем 24 вертикальной скорости качки и курсовым 16 и глиссадным 17 радиомаяками и ТИИС 15. Входы экстраполятора 18 качки соединены с ПРЛС 12, вычислителем 13 ПРЛС и моделью 14 возмущений и качки. Входы ОСП 8 соединены с моделью 14 возмущений и качки и логическим устройством "запрет" 25. Вычислитель 7 ВТИ соединен с ВТИ 6 и регистрирующей АФА 5, выход дисплея 27 оператора соединен с КЗА 31, блоком 29 вычисления критериев и вычислителем ЭС 28.
ЛМК работает следующим образом.
ЛМК позволяет отрабатывать и проводить испытания систем управления ЛА в автоматическом, директорном и ручном управлении. В последнем случае применяется ОСП 8. На всех видах управления используется группа траекторных измерений: ПРЛС 12, ТИИС 15, КРМ 16, ГРМ 17, ВТИ 6 и АФА 5, которые дают возможность повысить точность измерений параметров за счет избыточности и комплексной обработки данных этих информационных средств.
Рассмотрим работу ЛМК в автоматическом режиме управления. Функциональное и логическое ядро ЛМК в данном случае составляют блоки 13 и 14 18 и 19 23 и 24.
Вначале на блоке 19 задается серия программных траекторий, "поднятых" над ВПП, устанавливаются начальные условия параметров полета Н, Z, D и угловые отклонения.
Задаются в физических величинах и баллах модель возмущений и качки корабля на блоке 14.
На вычислителе 23 модели динамики ЛА и САУ задаются передаточные числа и постоянные времени законов управления, изменяются их структура для доводки САУ; сюда же поступают по ЛПСУ для сравнения сигналы с бортовой САУ 2, характеризующие короткопериодическое движение ЛА.
Группа траекторных средств слежения за ЛА и блоки 12, 15, 16, 17, 6 и 5 включаются в процесс работы и выдают значения координат ЛА для контроля траектории.
При отклонении органов управления ЛА по сигналам САУ 2, получаемым с информационных задатчиков с борта ЛА, данные поступают по радиолинии ЛПСУ 9 на наземную часть ЛМК в виде значений текущих параметров короткопериодического движения ЛА: углового положения ν,γ,Ψ; угловых скоростей ωх, ω y, ωz; перегрузок nx, ny, nz; отклонений органов управления δl,δэ,δн. Эти данные поступают в вычислитель 10 команд управления и вычислитель 23 модели динамики ЛА и САУ для сравнения.
В то же время с наземной части ЛПСУ 9 передаются на борт САУ с вычислителей ЛМК параметры заданных команд управления, параметры траектории, заданные возмущения для индикации летчику.
Сигналы с ПРЛС 12 азимута А, дальности D и угла места θ поступают на вычислитель 13 ПРЛС, где определяются отклонения от измеренных величин ΔНизмер, ΔZизмер, которые далее поступают на вычислитель 10 команд управления. Эти же сигналы одновременно поступают на наземную часть ЛПСУ 9 для передачи на борт и в наземную часть ЛМК на сумматор 21 и вычислитель-экстраполятор 18 качки для вычисления прогноза.
В экстраполяторе 18 решаются уравнения прогноза движения палубы корабля, а сигналы с него поступают на вычислитель 24 вертикальной скорости Vy корабля. Значения Vy корабля является критическим параметров посадки с точки зрения прочности и безопасности в условиях больших гидровозмущений.
Далее эти сигналы поступают на логическое устройство 25 запрета посадки, если сигналы Vy выходят за допустимые значения. Эти же сигналы поступают на вычислитель 19 программных траекторий и вычислитель 23 модели ЛА и САУ, в котором решаются уравнения динамики данного контура управления. Сюда же поступают сигналы коротко-периодического движения ЛА и САУ 2 из ЛПСУ 9, где производится их сравнения и корректировка.
На сумматор 21 поступают траекторные сигналы с вычислителя 19 программных траекторий и вычислителя 13 ПРЛС, на другой сумматор 22 поступает разность первого сумматора и вычислителя 23 модели динамики ЛА и САУ, а разность их в виде сигналов отклонения от траектории посадки Δ Н и ΔZ (возмущений) поступает на модель 14 возмущений и качки корабля.
С выхода первого сумматора сигналы Нзад. Низм поступают на второй вход логического устройства 25. Если данная разность превышает допустимое значение, то выдается также сигнал запрета посадки вследствие больших отклонений от заданной траектории.
Сигналы вычислителя модели 14 возмущений и качки поступают как справочный сигнал летчику через вычислитель 10 команд управления на имитацию качки при визуальном полете, на систему стабилизации ОСП 8 и на вход ПРЛС 12 для имитации режимов срывов слежения этих средств при больших волнениях моря. Эти же сигналы модели 14 поступают на вычислитель-экстраполятор 18 качки, которые вместе с сигналами ПРЛС 12, модели 14 возмущений и качки и вычислителя 13 ПРЛС формируют прогноз траектории приземления на палубу корабля.
На блок 29 вычислителя критериев поступают сигналы с вычислителя 19 программных траекторий, с модели 14 возмущений и качки, вычислителя 24 вертикальной скорости Vy и весь набор траекторных и коротко периодических параметров ЛА с вычислителя 23 модели динамики ЛА и САУ. Здесь определяются статистические характеристики точности, а также вероятности выполнения траекторий полета.
Для отображения информации на дисплей 27 поступают сигналы с соответствующих выходов вычислителей моделей возмущений и качки, модели ЛА и САУ, с блока вычисляемых критериев и вычислителя ЭС 28, связанной также с блоком 29 вычисляемых критериев.
Инженер-оператор с помощью устройства отображения информации дисплея 27 сравнивает заданные и текущие значения параметров и критериев (в "коридорах" по времени), поступающих с ЛПСУ и вычислителей ЛМК nyзад, γзад, νзад, Нзад, Zзад, ΔНизм, ΔZизм, амплитуды возмущений качки по трем осям и принимает решения по проведению и продолжению экспериментов. Оператор на основе имеющейся информации делает заключение о точности, вероятности выполнения режимов, устойчивости контуров системы, документирует материалы испытаний на блоках 5 и 31.
ПРЛС предназначена для инструментального управления заходом на посадку для этого определяются координаты ЛА: угол места от горизонта, угол курса относительно нулевой оси, наклонная дальность до точки установки ПРЛС 12.
ПРЛС 12 построена по принципу одноканального следящего радиолокатора с коническим сканированием луча антенны, создающим в пространстве равносигнальную зону. При изменении углового положения ЛА в пространстве появляется сигнал ошибки, который обеспечивает автоматическое слежение антенны за ЛА. В основу создания ПРЛС 12 положены радиолокационные принципы РЛС, работающей в миллиметровом диапазоне волн.
Параболическое зеркало системы формирует заданную диаграмму направленности. Механизм конического обзора заставляет вращаться диаграмму направленности в пространстве относительно оси, в результате чего формируется равносигнальная зона (РСЗ). Если цель находится на РСЗ, то отображенные импульсы будут одинаковой по амплитуде величины. Если цель находится не на РСЗ, импульсы будут промодулированы по амплитуде, глубина модуляции будет определять степень отклонения от равносигнальной зоны, а фазовый сдвиг относительно генератора опорного напряжения, с частотой которого вращается механизм обзора, угловое направление рассогласования оси антенны (совпадает с зоной равносигнального направления).
Выработка сигналов имеющегося рассогласования пропорционально амплитуде происходит в аппаратуре слежения и измерения углов.
Сигналы с ПРЛС 12 подаются на вычислитель 13 ПРЛС для выполнения расчетов в реальном времени. Вычислитель 13 ПРЛС предназначен для управления ПРЛС, вычисления текущих параметров системы, выработки сигналов управления для ЛА. В вычислителе определяются отклонения ЛА от заданной траектории по высоте Δ Н, боковому отклонению ΔZ, текущая информация о дальности L и скорости сближения.
В вычислителе 13 ПРЛС осуществляется подготовка информации для управления ЛА: формирование сообщений для ЛПСУ, управление антенной и параметром дальности, отображение информации (параметров ПРЛС-12), ввод целеуказаний и программной траектории.
В вычислителе 13 ПРЛС преобразуются сферические координаты в прямоугольные (обе системы относительно точки стояния ПРЛС) по формулам
Y ρ sinβ
Х ρ cos β cos α
Z ρ cos β sin α где α угол курса; β угол места; ρ наклонная дальность.
Осуществляется перенос прямоугольной системы координат в точку посадки по формулам
Xo X + Xтп,
Yo Y + Yтп,
Zo Z + Zтп.
Вычисляются отклонения по курсу и по глиссаде от программной траектории
Δ Z Zo Zпрогр.,
Δ Н Yo Yпрогр.,
а также коэффициенты разнослышимости εк, εr.
Для ЛПСУ формируется массив информации отклонений ΔН, Δ Z, дальности Х, скорости сближения Vсбл и N номер борта.
Сигналы с ПРЛС 12 через вычислитель 10 команд управления подаются на наземную часть ЛПСУ 9. ЛПСУ 9 посадкой предназначена для приема информации вычислителя 10 команд управления о положении ЛА относительно программной траектории, преобразования этой информации в сигналы посадки радиомаячных систем и передачи этих сигналов преобразованных двоичных сигналов ЭВМ в сигналы посадки с широтно-импульсной модуляцией по радиоканалу на борт ЛА.
ЛПСУ 9 передает сигналы по курсу, по глиссаде, дальности, скорости сближения. В режиме "поиска" ПРЛС 12 ЛПСУ находится в ждущем режиме. После входа ПРЛС 12 в режим "сопровождения" в ЛПСУ подается также этот сигнал, по которому она включается в рабочий режим. В этом режиме происходят прием информации с вычислителя 10 команд управления, преобразование информации и получение высокочастотных сигналов через антенну ЛПСУ.
Сигналы в вычислитель 10 команд управления поступают с модели 14 возмущений и качки и логического устройства 25.
Команды управления формируются как результат преобразования траекторных измерений в управляющий сигнал
ny,зад Δ Hизм. К1,
γзад Δ Zизм. К2,
Δ Низм Fнизм (Н Нпрогн),
Δ Zизм Fzизм (Z Zпрогн), где Fнизм, Fzизм функции измерителей;
К1, К2 масштабы.
Команда управления nyзад в вычислителе 10 команд управления формируется в соответствии с законом
nyзад= Δ HизмW in+
in+  1+
1+  1+
1+  , где ΔНизм (Н Нзад) Fл измеренное ПРЛС рассогласование по высоте;
, где ΔНизм (Н Нзад) Fл измеренное ПРЛС рассогласование по высоте;
Fл передаточная функция РЛС от Н к Низм;
W фильтр подавления высокочастотных шумов в узкой полосе частот ω; in+
in+  звено, преобразующее сигнал ΔНизм в сигнал ny;
звено, преобразующее сигнал ΔНизм в сигнал ny; 1+
1+  изодромное звено для описывания инструментальных ошибок датчика перегрузки, величина
изодромное звено для описывания инструментальных ошибок датчика перегрузки, величина  ограничена;
ограничена; звено для уменьшения перерегулирования по высоте в замкнутом контуре;
звено для уменьшения перерегулирования по высоте в замкнутом контуре; 1+
1+  звено для повышения быстродействия контура при отработке сигнала высоты.
звено для повышения быстродействия контура при отработке сигнала высоты.
На вычислитель 19 программных траекторий подаются сигналы с КРМ 16, ГРМ 17, ТИИС 15, экстраполятора 18 качки, вычислителя 24 вертикальной скорости качки.
Вычислитель 19 программных траекторий реализуется в виде системы алгоритмов для траекторий в продольной и боковой плоскостях с различной крутизной радиосигналов. Структура вычислителя 10 формируется в вертикальной плоскости в координатах земной системы координат НОХ (фиг. 2).
Hзад= где Δ Но компенсирующая поправка;
где Δ Но компенсирующая поправка;
D расстояние до цели;
θ траекторный угол.
В памяти заложены несколько видов программных траекторий. Выбранная или заданная глиссада снижения является программной траекторией: Y программное в плоскости УОХо и Z программное в плоскости ZOX. В вычислителе 19 формируется массив отображаемой информации на дисплее 27 оператора. В вычислителе 19 происходит преобразование сферической системы координат в цилиндрическую для отображения в ней положения ЛА на экране дисплея 27.
Все указанные сигналы и преобразования подаются на КЗА 31.
Сигналы на модель 14 возмущений и качки поступают с измерителя 11 метеорологических параметров и блока 20 сумматоров в виде отклонений от заданной траектории.
Оценить работу САУ при сигналах внешних воздействий в виде стационарных случайных процессов можно с помощью корреляционных функций и спектральных плоскостей R (τ) и S(ω). При случайных воздействиях речь идет об определении средних значений ошибки и выходной переменной системы. Таким средним значением является среднее значение квадрата случайной выходной переменной системы =
= 
 Sвых(ω)dω.
Sвых(ω)dω.
Для моделирования качки судов используется модель плоского или двумерного нерегулярного волнения, распростра- няющегося в одном направлении. В качестве оценки волнового процесса используется спектральная плотность S(ω). Это оценка аппроксимируется выражением вида
S(ω)Aω-Kexp(-βω-n), где А, В параметры, определяемые средними значениями элементов видимых волн на поверхности моря;
к, n параметры, зависящие от формы спектра, связанной с условиями волнообразования.
Имитаторы качки и ветровых возмущений представляют собой генераторы случайных возмущений сигналов, пропущенных через электрические фильтры II порядка вида W(p) K/(T2P2 + ζ2Tp+1). Генераторы для формирования импульсных случайных последовательностей имеют независимо регулируемые величины математического ожидания и дисперсии длительности интервалов, а также заданный характер распределения плотности вероятности.
Сигналы на экстраполятор 18 качки поступают с ПРЛС 12 вычислителя 13 ПРЛС модели 14 возмущений и качки.
За время обработки информации, приходящей от ЛА, выработанные управляющие воздействия оказываются неадекватными текущему состоянию. Поэтому система управления ЛМК должна обладать способностью предсказания. В алгоритме управления учитывается предыстория и тенденция поведения ЛА, изменение окружающей среды. Поэтому управляющие воздействия формируются с учетом запаздывания на время Δ t обработки информации. Кроме того, блок прогноза экстраполятор 18 облегчает работу летчика по управлению ЛА, так как компенсирует запаздывания летчика и ЛА, улучшает качество процессов управления.
Hпрогр Dsin θo + Hпрогн,
Zпрогр Dsin Ψ + Zпрогн, где D дальность до расчетной точки;
Нпрогн прогноз движения корабля.
Прогнозирование качки корабля сводится к ускоренному просчету вперед на будущее время tк по известной модели движения посадочной площадки и измерениям в настоящий момент времени ti (ti)=[E+T
(ti)=[E+T (ti)]k-i
(ti)]k-i (ti),
(ti), (ti)=h(tk), где
(ti)=h(tk), где  (ti) оценка вектора, компоненты которого производные;
(ti) оценка вектора, компоненты которого производные;
hпрогн h'прогн, h''прогн, h'''прогн прогнозируемые значения вертикальной качки и ее производных h', h'', h'''; h'(ti) оценка координат качки;
F(ti) оценка матрицы коэффициентов модели;
Т дискретность вычислений.
ВТИ 6 служит для регистрации траекторий захода на посадку, сигналы с него поступают на вычислитель 7 ВТИ. Зондирующий сигнал формируется лазером в виде пучка когерентного излучения, для повышения направленности его излучения он коллимируется передающей системой. Отраженное от зеркала, установленного на ЛА, излучение собирается приемной оптической системой, пропускается через узкополосный интерференционный оптический фильтр для снижения фоновой засветки и преобразуется фоточувствительным элементом в электрический сигнал. Усиленные сигналы с выхода приемного блока поступают в блок обработки, в который подводится также опорный сигнал. Принятый и опорный сигналы позволяют измерить дальность по времени распространения сигнала до ЛА и обратно. В вычислителе ВТИ одновременно определяются угловые и линейные координаты ЛА.
Сигналы на блок 29 вычисления критериев поступают с вычислителя 19 программной траектории, вычислителя 24 вертикальной скорости, модели 14 возмущений и качки.
В процессе проведения летных испытаний в блоке 29 вычисления критериев получается оценка качества САУ. Процесс оптимизации законов САУ начинается с прихода данных о траектории ЛА, получаемых с блоков 14, 19, 23.
Выбрав экстремальные значения функционалов, инженер-испытатель включает вычислитель 19 программных траекторий, в котором формируются зависимости Н зад, Zзад.
Оценка качества работы ЛМК, как и любой сложной системы, проводится с помощью показателей эффективности числовых характеристик системы. Они оценивают степень приспособленности ЛМК к выполнению поставленных задач.
Данные критерии вычисляются в условиях возмущений при различных начальных условиях (Н, V, Z Ψ) и различных эксплуатационных разбросах параметров (передаточных чисел внутреннего и траекторного контуров).
При проведении ЛИ САУ с помощью ЛМК используются показатели эффективности, учитывающие главным образом точность и качество выхода на заданную траекторию ΔH, Δε,ΔZ,Δεк,t(εк),t(εт) качество движения по траектории Vмакс, γмакс, σγ, σ(ωy), σ(ωz),σ(ny); точность выполнения захода на посадку σн, σz, σv; точность выполнения посадки на "квази палубу" σнтк, σl, σz; качество выполнения посадки Vyмакс, Vzмакс, Δ Lмакс, Vмакс; качество отработки заданных команд управления nyзаб, γзаб.
Вычисление среднеквадратических отклонений ошибок по выборке производится по формуле
σ 
 ,
,
где Yi фактические;  расчетные величины; (n 1) число степеней свободы.
расчетные величины; (n 1) число степеней свободы.
Блок 29 вычисления критериев реализуется в виде измерителя указаний дисперсий Di.
КРМ 16 использует принципы двойной амплитудной модуляции, излучает сигналы двух видов. Один из них представляет собой сигнал несущей частоты, промодулированный по амплитуде низкой частотой, например f 60 Гц. Характеристика направленности этого излучения такова, что образуются два лепестка, разделенных плоскостью посадочного курса. При этом модулирующие напряжения в обоих лепестках находятся в противофазе, а коэффициент глубины модуляции является функцией угловой координаты, отсчитываемой от оси ВПП. Фаза модулирующего напряжения этого излучения при переходе через плоскость посадочного курса меняется на 180о излучение переменной фазы.
Второй вид слабонаправленного излучения также имеет напряжение частоты f, в котором фаза его постоянна в любой точке поля излучение постоянной фазы. Напряжение f сигнала постоянной фазы синфазно с модулирующим напряжением сигнала переменной фазы в одном из лепестков.
По своему принципу действия ГРМ 17 похож на КРМ 16. Он использует принцип двойной амплитудной модуляции. Излучение ГРМ образует в пространстве два пересекающихся поля, РСЗ лежит в заданной плоскости снижения, образуя угол εr, и сигнал поступает в вычислитель 19 программных траекторий.
Сигналы с ТИИС поступают на вычислитель 19 программных траекторий. С помощью ТИИС производится измерение координат ЛА, необходимых для регистрации траекторий захода на посадку. В ТИИС может использоваться передающая трубка типа "видикон". Например, ТИИС может автоматически измерять координаты ЛА по осям, совпадающим с направлениями кадровой и строчной разверток.
Если изображение ЛА на экране телевизионного приемника оказалось смещенным на величину Х по горизонтальной оси и на величину Y по вертикальной оси, то при фокусном расстоянии объектива F смещение изображения на расстояние Х будет означать, что ЛА сместился в горизонтальной плоскости относительно продольной оси передающей трубки на угол α, который находится из условия tg α x/F. Аналогично смещение изображения на величину Y в вертикальной плоскости происходит при малом отклонении объекта на угол β, для которого tg β Y/F.
Если автоматически измеряются смещение ЛА по осям Х и Y, то определяются угловые отклонения этого объекта относительно оси телевизионной камеры. Эти данные с помощью управляющего устройства поворачивают телевизионную камеру так, чтобы изображение ЛА непрерывно удерживалось в поле зрения передающей камеры.
Так как ЛА имеет небольшие размеры, то при развертке его изображения будет получен короткий видеоимпульс, сдвинутый во времени от начала строки. При смещении ЛА по оси Х величина сдвига будет меняться. Схема измеряющего временного сдвига (на триггерах) будет схемой измерения координаты Х изображения ЛА. Аналогичным образом, зная временной интервал между началом кадровой развертки и видеоимпульсом наблюдаемого ЛА, определяется координата Y.
Сигналы на ОСП 8 поступают с вычислителя 10 команд управления и логического устройства "запрет" 25.
ОСП 8 обеспечивает летчика кодированной цветовой информацией о положении ЛА при заходе на посадку на корабль.
Оптический блок системы состоит из пяти линзовых ячеек, расположенных одна над другой. Каждая излучает световой пучок в азимутальной и вертикальной плоскостях, причем три средние ячейки дают желтый свет (по глиссаде планирования), верхняя постоянный белый, а нижняя красный проблесковый. По обеим сторонам средней ячейки находятся проблесковые зеленые огни разрешения посадки и вертикальные красные запрета. Справа и слева от последних на одинаковом уровне с центральной ячейкой оптического блока размещены постоянные зеленые (опорные) огни. ОСП, стабилизированная по качке, помогает летчику определять скорость перемещения ЛА в трех плоскостях. ОСП показывает летчику местонахождение ЛА относительно оптимальной глиссады планирования по цветным сигнальным, базовым, индикационным огням. Если летчик будет входить в зону действия огней ниже заданной глиссады, то он увидит красный постоянный или проблесковый огонь, если же он поднимается выше глиссады, то желтый или проблесковый красный свет, при полете точно по заданной глиссаде зеленый огонь. Летчик стремится удержать ЛА на этой глиссаде, не допуская проваливания его или выхода из оптимальной глиссады планирования, контролируя при этом вертикальную скорость.
Угломерный метод определения местоположения ЛА основан на одновременном измерении углов визирования ЛА из двух различных точек. Реализация этого метода обеспечивается на оптическом принципе кинотеодолитным методом. Измеряемыми параметрами являются углы азимута α и места β, измерения ведутся из двух точек с измерительной базой В. Тогда координаты ЛА
X B 
Z B  ,
,
Y B  ,
,
ϕ1= B  , где R радиус земли в данной местности.
, где R радиус земли в данной местности.
Сигналы с вычислителя 7 ВТИ поступают на фоторегистратор АФА 5 и на саму аппаратуру ВТИ 6.
АФА 5 служит для регистрации траекторий ЛА захода на посадку на корабль. Методика регистрации и фотосъемки включает съемку в дневное и ночное время контуров участка местности, измерение опорных координат на местности и снимке, привязку фотоснимка в системе координат Гаусса-Крюгера, съемку звездного неба и регистрацию огней освещения, связь с опорными точками соответствующей геофизической сети.
Измеритель 11 метеорологических параметров выдает значение температуры Т, давления Р, метеорологическую дальность видимости Sм на полосе и др. Сигналы с измерителя 11 поступают в систему ЛМК и модель 14 возмущений и качки.
КЗА 31, соединенный с дисплеем 27, включает аппаратуру регистрации параметров состояния бортового оборудования ЛАК, корабельного оборудования и самого комплекса ЛМК, осциллографы, магнитную запись, графопостроители.
Сигналы с экстраполятора 18 качки поступают на вычислитель 24 вертикальной скорости Vy качки, который представляет собой аналоговое или цифровое устройство, реализующее алгоритм,
Vy=  + R
+ R , где R расстояние от точки экстраполяции качки до точки ожидаемой встречи ЛА с палубой;
, где R расстояние от точки экстраполяции качки до точки ожидаемой встречи ЛА с палубой; прогнозируемое значение скорости вертикальных перемещений (качки);
прогнозируемое значение скорости вертикальных перемещений (качки); прогнозируемое значение угловой скорости дифферента.
прогнозируемое значение угловой скорости дифферента.
Сигналы с вычислителя 24 вертикальной скорости качки и сумматора (логическое устройство) 25, построенного на основе компараторов и триггеров и реализующего алгоритм, описываются

 где
где  ла прогнозируемое значение вертикальной скорости самолета в ожидаемой точке касания;
ла прогнозируемое значение вертикальной скорости самолета в ожидаемой точке касания; прогнозируемое значение высоты пролета самолетом условного кормового среза (КС);
прогнозируемое значение высоты пролета самолетом условного кормового среза (КС);
Ндоп.ух. допустимая граница высоты безопасного ухода на второй круг;
Zдоп допустимая граница предельных боковых отклонений самолета.
Сигналы с вычислителя 19 программных траекторий, модели 14 возмущений и качки поступают на дисплей 27. Пользовательский диалоговый интерфейс обеспечивает связь на ограниченном естественном языке, речевой вывод, а также визуальное представление (графику, фиг. 3).
Сигналы с бортового радиоприемника 4 поступают на САУ 2. Курсовой радиоприемник, установленный на борту самолета, используя напряжение частоты f излучения постоянной фазы в качестве опорного сигнала, определяет фазу модулирующего напряжения излучения переменной фазы и коэффициент глубины модуляции. В плоскости посадочного курса сигнал переменной фазы равен нулю и ток на выходе приемника отсутствует. При отклонении ЛА от оси ВПП появляется сигнал переменной фазы, коэффициент глубины модуляции нарастает по линейному закону. Характеристика коэффициента глубины модуляции сигнала переменной фазы: каждому угловому отклонению самолета от оси ВПП соответствует определенное отклонение стрелки нуль-прибора.
Принятые антенной сигналы КРМ 16 поступают в высокочастотные каналы, где усиливаются по высокой частоте, преобразуются, а затем после усиления по промежуточной частоте поступают в амплитудный детектор. После усиления и ограничения на частотном детекторе выделяется напряжение постоянной фазы.
Сигнал с бортовой САУ 2 поступают на бортовую часть ЛПСУ 3.
На борту ЛА в САУ 2 алгоритм формирования команды управления nyреализуется в виде =
=  , где Тпр постоянная времени запаздывания приемника сигнала ЛПСУ, радиопомехи фильтруются апериодическим фильтром W(p)
, где Тпр постоянная времени запаздывания приемника сигнала ЛПСУ, радиопомехи фильтруются апериодическим фильтром W(p)  .
.
Управление перемещением штока сервопривода САУ получается в виде
ΦРАУ=  +
+  + i
+ i ny, где ωz угловая скорость по тангажу для ЛА;
ny, где ωz угловая скорость по тангажу для ЛА;
ny текущая перегрузка;
μω2 передаточное число сигнала угловой скорости к рулю;
ν, ihy передаточные числа;
Т постоянная времени.
Данные о параметрах САУ и ЛА через аппаратуру сбора информации на борту подаются на передающую станцию ЛПСУ 3. По каналам ЛПСУ 3 передаются аналоговая и цифровая информация. Информация от датчиков группируется и перерабатывается для ввода в ЛПСУ. Скорость опроса определяется характером ожидаемой информации, чтобы обеспечить необходимую точность слежения за амплитудой, частотой и фазой сигнала. Калибровка каждого датчика с учетом калибровки всей системы проводится, не прерывая информации. Пропускная способность каналов обеспечивается выбором необходимого их числа, интенсивность радиосигналов не меняется от расстояния до приемника.
Блок 28 представляет собой ЭВМ с реализованной в ней ЭС оператора и руководителя захода на посадку, которая решает задачу управления заходом на посадку самолетов в потоке с заданным интервалом приземления. ЭС, опираясь на знания, содержащиеся в ее базе и включающие обобщенный опыт руководителей заходов на посадку и специальные знания о динамике самолета, возможных ситуациях, получающихся при отказах оборудования и т. д. осуществляет сбор информации и анализирует готовность наземных посадочных средств и самолета к выполнению посадки, контролирует безопасность полета самолетов в потоке и формирует свое заключение о качестве выполнения режима каждым самолетом. В случае прогнозирования опасной ситуации вырабатывает решение о способе управления конфликтующими самолетами, рекомендует его руководителю заход на посадку и объясняет, если это требуется, почему она "пришла" к такому решению. Для этого ЭС в соответствии со знаниями и в зависимости от ситуации представляет информацию в определенном виде на дисплее руководителя и обеспечивает эффективный диалог между человеком и ЭВМ, требующий минимум времени для оценки ситуации по поступающей информации.
Невозможность обеспечения полного соответствия математических моделей и реальных характеристик систем комплекса посадки моделей деятельности человека (оператора) в общем контуре управления и контроля безопасности посадки не дает гарантий получения необходимой достоверности на этапах математического и полунатурного моделирования. Все это предопределяет необходимость проведения летных испытаний экспериментальных и опытных образцов как самих систем (САУ), так и комплекса в целом с применением летающих лабораторий и опытных ЛА корабельного базирования.
Методика проведения работ на ЛМК состоит в следующем.
Работа алгоритмов, реализуемых на ЭВМ, начинается после нажатия на борту кнопки "Посадка" при условии нахождения ЛА в допустимом "окне" по высоте и боковому отклонению от оси ВПП. Ведущий инженер комплекса ЛМК задает необходимые категории видимости (Н х L) (гидрометеоминимумы) при условии L > Lла на блоки 19, 8, 14. Летчик начинает выполнять режимы посадки на "корабль" с расстояния Lла. Он видит при снижении ВПП и огни ОСП 8. При этом летчик выдерживает необходимую высоту, курс и скорость ЛА до опознания и захвата глиссады по ориентирам ОСП. Опознание этих ориентиров происходит с учетом категорий видимости состояния прозрачности атмосферы, освещенности. При поступлении сигнала из вычислителя 19 на ЭВМ в это время определяются критерии точности следования по заданной траектории. Инженер-оператор на дисплее 27 сравнивает заданные и текущие значения параметров и критериев (допуски), поступающих с ЛПСУ 9 и вычисленных в ЛМК (h ν
ν  γ задпо перегрузке, по тангажу, по крену в вычислителях 13, 23.
γ задпо перегрузке, по тангажу, по крену в вычислителях 13, 23.
Требования к траектории движения ЛА формируется для контрольных сечений (окон) 32-32 (фиг. 3), когда нормы отклонения от номинальной траектории формируются для определенных моментов времени и определенных дальностей до цели полета. Уравнение отклонений от траектории для каждого сечения
(Х Хц)2 + (H Hц)2 + (Z Zц)2 Dц2 0.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2067951C1 |
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1990 |
|
SU1797242A1 |
| ИМИТАТОР ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 1991 |
|
RU2056646C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
Использование: в авиационной технике для исследования и отработки систем автоматического управления (САУ) в посадочных режимах на авианосный корабль. Сущность изобретения: в наземную часть летно-моделирующего комплекса введены посадочная радиолокационная станция (ПРЛС) 12 с вычислителем 13 ПРЛС, вычислитель 10 команд управления, вычислитель модели 14 возмущений и качки, вычислитель-экстраполятор 18 качки корабля, вычислитель 24 вертикальной скорости качки корабря, блок 29 вычисления траекторных критериев, логическое устройство 25, внешнетраекторный оптический измеритель (ВТИ) 6 с вычислителем 7, оптическая система 8 посадки (ОСП), курсовой 16 и глиссадный 17 радиомаяки, телевизионная измерительно-информационная система 15, измеритель 11 метеорологических параметров, регистрирующая авиафотоаппаратура (АФА) 5. При этом первый выход вычислителя 13 ПРЛС 12 через вычислитель 10 команд управления связан с линией 3 передачи сигналов управления, второй выход связан с последовательно соединенными вычислителем-экстраполятором 18 качки корабря, вычислителем 24 вертикальной скорости качки, логическим устройством 25, с соответствующими входами вычислителя 10 команд управления, третий выход связан с первым входом первого сумматора 21, второй вход которого соединен с вычислителем 19 программных траекторий, с блоком 29 вычисления траекторных критериев, первый выход связан с вторым входом логического устройства, а второй выход связан с первым входом второго сумматора, второй вход которого через вычислитель модели ЛА и САУ связан с вторым выходом вычислителя вертикальной скорости качки, подключенным также к соответствующим входам вычислителя программных тракторий и блока вычисления критериев. Выход второго сумматора связан с первым входом вычислителя модели возмущений и качки, второй вход которого связан с измерителем метеорологических параметров, первый выход связан с вторыми входами вычислителя команд управления и ОСП, второй выход связан с ПРЛС, третий выход связан с вторым входом вычислителя-экстраполятора качки, третий вход которого связан с ПРЛС, первый выход связан с логическим устройством, второй выход связан с первым входом вычислителя программных траекторий, вторые входы которого связаны с вычислителем ВТИ, далее с АФА и с системой отображения (дисплеем), которая подключена к соответствующим входам вычислителей моделей возмущения и качки, модели ЛА и САУ, к блоку вычисляемых критериев, к вычислителю экспертной системы, подсоединенному к блоку вычисляемых критериев. 3 ил.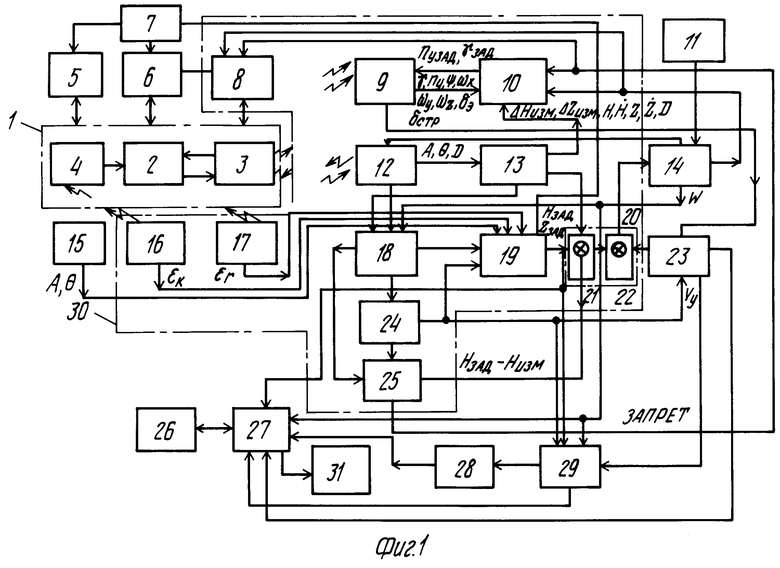
ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ, включающий бортовую часть, содержащую систему автоматического управления с информационными датчиками углового и линейного положения летательного аппарата и сервоприводами, взаимосвязанную с линией передачи сигналов управления, и наземную часть, содержащую линию передачи сигналов управления, устройство отображения информации, вычислитель динамики полета летательного аппарата и контрольно-записывающую аппаратуру, отличающийся тем, что в бортовую часть введен курсоглиссадный радиоприемник, подключенный к системе автоматического управления, а в наземную часть введены посадочная радиолокационная станция, связанная с соответствующим вычислителем, вычислитель команд управления, взаимосвязанный с линией передачи сигналов управления, последовательно соединенные вычислитель модели возмущений и качки, вычислитель экстраполятор качки, вычислитель вертикальной скорости качки корабля и логическое устройство запрета посадки, выход которого соединен с вторым входом вычислителя команд управления и оптической системой посадки, последовательно соединенные блок вычисления критериев качества и блок вычисления экспертной системы, выход которого подключен к первому входу устройства отображения информации, последовательно соединенные вычислитель программных траекторий, первый вход которого соединен с вторым выходом вычислителя экстраполятора качки корабля, вычислитель внешнетраекторного оптического измерителя и внешнетраекторный оптический измеритель, связанный с оптической системой посадки, курсовой и глиссадный радиомаяки, телевизионная информационно-измерительная система, соединенные соответственно с тремя входами вычислителя программных траекторий, измеритель метеорологических параметров, выход которого соединен с первым входом вычислителя модели возмущений и качки корабля, регистрирующая фотоаппаратура авиационный фотоаппарат и два сумматора, причем первый и второй выходы вычислителя посадочной радиолокационной системы подключены соответственно к третьему входу вычислителя команд управления, четвертый вход которого объединен с входом оптической системы посадки и соединен с вторым выходом вычислителя модели возмущений и качки корабля и первым входом первого сумматора, второй вход которого объединен с первым входом блока вычисления траекторных критериев и третьим входом устройства отображения информации и подключен к выходу вычислителя программных траекторий, выходы первого сумматора соединены соответственно с первым входом второго сумматора и вторым входом логического устройства запрета посадки, третий вход которого подключен к третьему выходу вычислителя экстраполятора качки корабля, второй и третий входы которого соединены соответственно с выходами посадочной радиолокационной системы и ее вычислителя, выход второго сумматора соединен с вторым входом вычислителя модели возмущений и качки корабля, третий выход которого соединен с посадочной радиолокационной системой, второй вход второго сумматора подключен к первому выходу вычислителя модели динамики летательного аппарата, второй и третий выходы которого соединены соответственно с вторыми входами устройства отображения информации и блока вычисления траекторных критериев, первый вход соединен с выходом линии передачи сигналов управления, а второй вход объединен с пятым входом вычислителя программных траекторий и вторым входом блока вычисления траекторных критериев и подключен к второму выходу вычислителя вертикальной скорости качки, третий вход блока вычисления траекторных критериев объединен с четвертым входом устройства отображения информации и подключен к первому выходу вычислителя модели возмущений и качки корабля, а второй выход соединен с пятым входом устройства отображения информации, выход которого соединен с контрольно-записывающей аппаратурой.
| Способы и системы для управления коммутацией напряжения | 2016 |
|
RU2713140C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
