Изобретение относится к области электротехники, в частности к электромагнитным приводам постоянного тока для передачи угловых перемещений, и может быть использовано для создания двухпозиционных электромагнитных реле или устройств с поворотом подвижного элемента на некоторый ограниченный угол и обратно с двумя устойчивыми состояниями.
Известен электромагнитный привод исполнительного коммутирующего устройства, который выполнен в виде поляризованного реле с возвратно-поворотным движением якоря. Патенты на изобретения RU 2367050, МПК H01H 35/14, 10.09.2009; RU 2435244, МПК H01H 35/14, 27.11.2011.
Недостатками известных электроприводов являются малый угол поворота около 6°, недостаточный в некоторых случаях, например, для замыкания скользящих контактов или высоковольтных цепей; возможность изменить состояние при аварийном ударе; сложность конструкции, а именно две обмотки, намотанные на два сердечника.
Известен электромагнитный двигатель, содержащий ротор в виде диска с расположенными по его периферии постоянными магнитами и статор с обмотками. Статор выполнен в форме диска из магнитомягкого материала с бобовидными обмотками с намоткой, выполненной во встречных направлениях, соосно статору установлен ротор с магнитами разной полярности, повторяющими геометрию обмоток, поля магнитов параллельны оси вращения ротора, при этом ротор и статор установлены с угловым смещением относительно друг друга. Патент на полезную модель RU 133663, МПК H02K 33/16, 20.10.2013.
Недостатками электродвигателя являются отсутствие устойчивого состояния в крайних положениях при отсутствии тока в обмотках (необходимо предусматривать дополнительную фиксацию); большая масса подвижной части (менее устойчива к ударам); сложность конструкции.
Известен электродвигатель, содержащий явнополюсный статор по крайней мере с одной обмоткой управления и ротор с полюсами из постоянных магнитов, расположенных на торцах и прилегающих к ним частях боковых поверхностей магнитопровода ротора, между соседними магнитами полюса ротора, расположенными на торце и прилегающих к нему частях боковых поверхностей магнитопровода ротора, находятся дополнительные магниты, полярность которых совпадает с полярностью полюса ротора. Патент на изобретение RU 2476977, МПК H02K 21/12, H01H 36/00, H02K 1/27, 27.02.2013. Данное техническое решение принято в качестве прототипа.
Недостатками являются значительные габариты, так как ось вращения якоря перпендикулярна оси обмотки; неоптимальное заполнение объема; сложность конструкции (введение дополнительных магнитов); низкая стойкость к воздействию внешних полей (постоянные магниты и обмотка открыты).
Задачей, решаемой изобретением, является создание в минимальных габаритах электромагнитного привода с двумя устойчивыми состояниями, с большим (до 60°) углом поворота, защищенного от внешних полей, с повышенной стойкостью к ударам в исходном и сработанном состояниях.
Техническим результатом является увеличение угла поворота якоря, увеличение тягового момента, повышение стойкости к воздействию внешних полей и к ударам в исходном и сработанном состояниях.
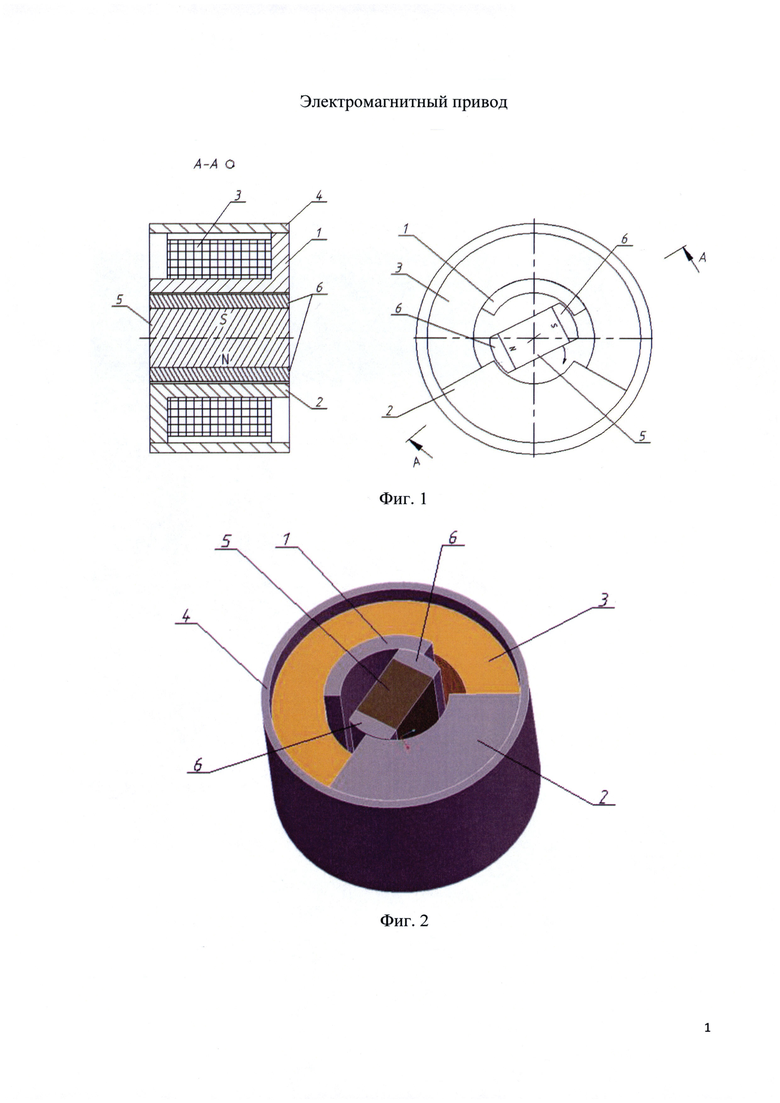
Технический результат достигается тем, что электромагнитный привод содержит статор и якорь. Он отличается тем, что статор выполнен из кожуха, обмотки и двух цилиндрических секторов - полюсов, расположенных напротив друг друга и имеющих на противоположных концах основание в виде сектора, соединенное с кожухом, а якорь установлен внутри статора и состоит из постоянного магнита с радиальной намагниченностью и двух накладок, причем между полюсами статора и накладками образованы два радиальных рабочих воздушных зазора, а оси полюсов, кожуха, обмотки и якоря совпадают.
Сущность изобретения поясняется фиг. 1, 2, 3.
На фиг. 1 представлен электромагнитный привод, где 1, 2 - цилиндрические сектора - полюса, 3 - обмотка, 4 - кожух, 5 - постоянный магнит, 6 - накладки.
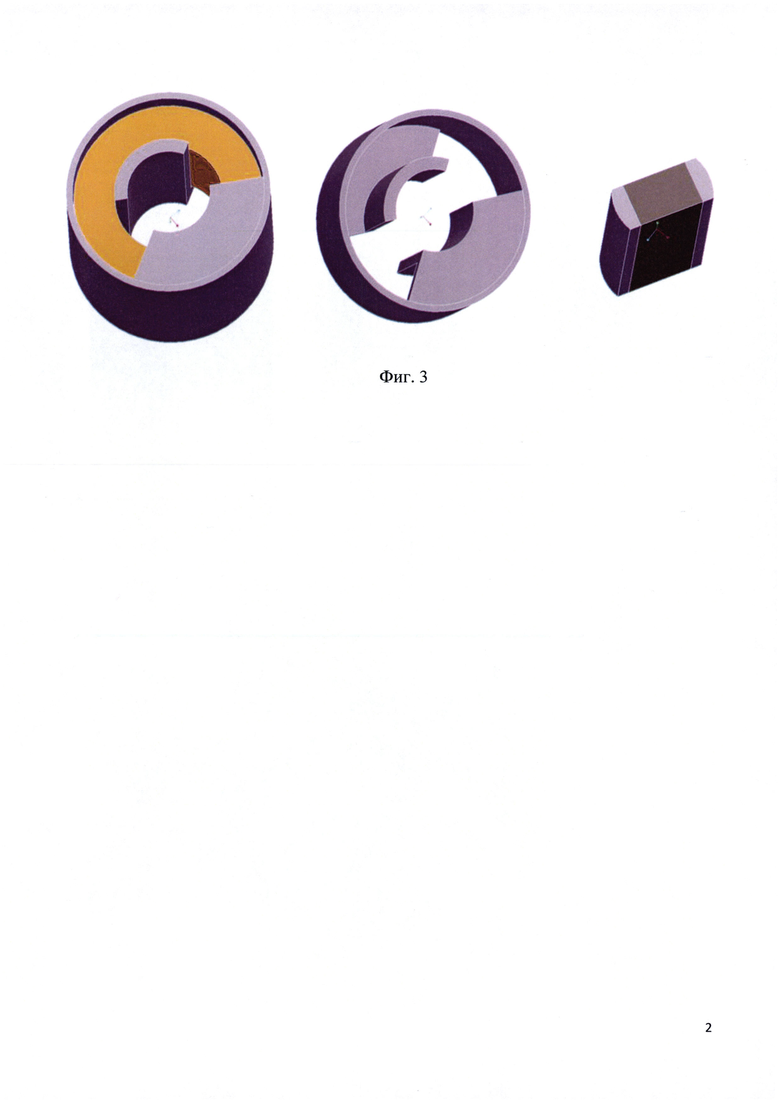
На фиг. 2 показана объемная модель электромагнитного привода.
На фиг. 3 слева на право показаны статор, статор без обмотки, якорь.
Электромагнитный привод содержит статор и якорь. Статор выполнен из обмотки 3, кожуха 4 и двух цилиндрических секторов - полюсов 1 и 2, расположенных напротив друг друга и имеющих на противоположных концах основание в виде сектора, которое соединено с кожухом 4. Якорь геометрически сбалансирован относительно оси вращения, установлен внутри статора и состоит из постоянного магнита 5 с радиальной намагниченностью и накладок 6, причем между цилиндрическими секторами - полюсами статора и накладками образованы два радиальных рабочих воздушных зазора, а оси полюсов, кожуха, обмотки и якоря совпадают.
Цилиндрические сектора - полюса 1, 2, кожух 4, накладки 6 выполнены из магнитомягкого материала. Все сечения в магнитной цепи выбраны из условия насыщения материала.
Обмотка 3 занимает пространство между кожухом и полюсами.
На фиг. 1 и 2 якорь находится в исходном положении. Срабатывание якоря осуществляется по часовой стрелке на рабочий угол 60°. Фиксация якоря в исходном и сработанном положении осуществляется с помощью внешних упоров (на фигурах не показаны).
Изобретение работает следующим образом.
При отсутствии тока в обмотке, в исходном положении, на якорь действует момент против часовой стрелки, создаваемый постоянным магнитом 5. Для модели электромагнитного привода диаметром 22 мм, высотой 14 мм момент составляет около 50 г⋅см (расчетное значение). При перемещении якоря к середине хода момент возрастает до 300 г⋅см, далее наступает равновесное состояние. Во второй половине хода знак момента на якоре симметрично изменяется на противоположный и якорь стремится повернуться по часовой стрелке.
При подаче тока определенной полярности на обмотку 3, якорь из исходного положения поворачивается на рабочий угол. Магнитная цепь образуется последовательно соединенными цилиндрическими секторами - полюсами 1 и 2, связанными основанием в виде сектора с кожухом 4, накладками 6, постоянным магнитом 7. В цепи имеются два минимальных радиальных рабочих воздушных зазора, паразитные зазоры отсутствуют.
Приведение якоря в исходное состояние осуществляется импульсом обратной полярности или второй обмоткой, намотанной рядом с обмоткой 3.
Увеличение угла поворота обеспечено за счет реализации движения якоря поперечно магнитному потоку в рабочих зазорах.
Увеличение тягового момента электромагнитного привода обеспечивается за счет компоновки деталей (в конструкции практически отсутствуют пустые области). Момент для рассматриваемой выше модели составляет 150 г⋅см в начале хода, 400 г⋅см в середине и 150 г⋅см в конце хода. Расчетный момент прототипа не превышает 100 г⋅см.
Большую стойкость к воздействию внешних полей обеспечивает кожух 4, который защищает от внешних полей и, кроме того, участвует в магнитной цепи. В прототипе существенно меньшая защищенность из-за открытости всех элементов электродвигателя.
Малая масса якоря, его сбалансированность, большой угол поворота, большой и при этом возрастающий момент (при отсутствии тока в обмотке) до равновесного состояния (середины хода) обеспечивают стойкость к значительным аварийным ударам в исходном и сработанном состояниях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ПОЛЯРИЗОВАННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2015 |
|
RU2599625C1 |
| Электрическая машина с модульными зубцами статора и обмотками из сверхпроводникового материала | 2020 |
|
RU2747884C1 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2478250C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| ДВИГАТЕЛЬ-МАХОВИК | 2017 |
|
RU2650178C1 |
| Магнитная система ротора с постоянными магнитами и способ ее изготовления | 2017 |
|
RU2646543C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОМБИНИРОВАННЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2390086C1 |
| ИНЕРЦИОННЫЙ ВКЛЮЧАТЕЛЬ | 2013 |
|
RU2562057C2 |
Изобретение относится к области электротехники, в частности к электромагнитным приводам постоянного тока для передачи угловых перемещений, и может быть использовано для создания двухпозиционных электромагнитных реле или устройств с поворотом подвижного элемента на некоторый ограниченный угол и обратно с двумя устойчивыми состояниями. Техническим результатом является увеличение угла поворота якоря, увеличение тягового момента, повышение стойкости к воздействию внешних полей и к ударам в исходном и сработанном состояниях. Электромагнитный привод содержит статор и якорь. Статор выполнен из кожуха, обмотки и двух цилиндрических секторов - полюсов, расположенных напротив друг друга и имеющих на противоположных концах основание в виде сектора, соединенного с кожухом. Якорь установлен внутри статора и состоит из постоянного магнита с радиальной намагниченностью и двух накладок, причем между цилиндрическими секторами - полюсами статора и накладками образованы два радиальных рабочих воздушных зазора. Оси статора, кожуха, обмотки и якоря совпадают. 3 ил.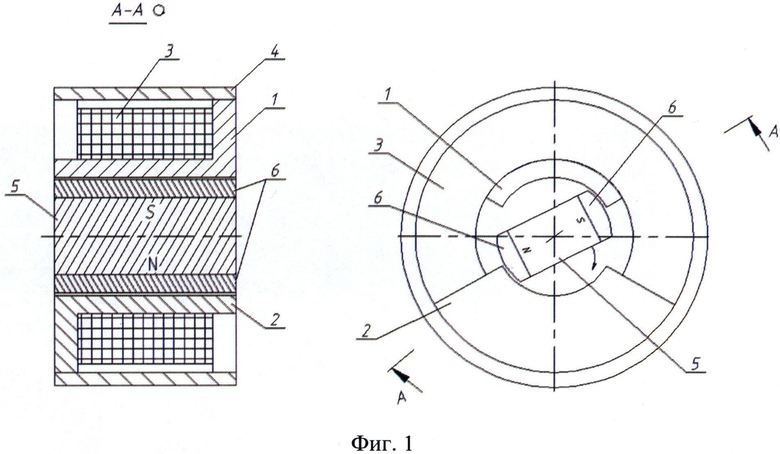
Электромагнитный привод, содержащий статор и якорь, отличающийся тем, что статор выполнен из кожуха, обмотки и двух цилиндрических секторов - полюсов, расположенных напротив друг друга и имеющих на противоположных концах основание в виде сектора, соединенного с кожухом, а якорь установлен внутри статора и состоит из постоянного магнита с радиальной намагниченностью и двух накладок, причем между цилиндрическими секторами - полюсами статора и накладками образованы два радиальных рабочих воздушных зазора, а оси полюсов, кожуха, обмотки и якоря совпадают.
| ЭЛЕКТРОДВИГАТЕЛЬ | 2011 |
|
RU2476977C1 |
| Съемный тензодатчик | 1960 |
|
SU133663A1 |
| Датчик частоты | 1981 |
|
SU1001342A1 |
| US 6891287 B2, 10.05.2005 | |||
| WO 2013054069 A2, 18.04.2013 | |||
| US 5289071 A1, 22.02.1994. | |||

