Изобретение относится к машиностроению и может быть использовано в электродвигателях. В частности, устройство может использоваться в электродвигателях-маховиках большого диаметра, применяемых для систем ориентации и стабилизации космических аппаратов, а также для систем «курс-вертикаль» атмосферных летательных аппаратов.
Известен управляющий двигатель-маховик (Патент на полезную модель №134517, МПК B64G 1/28), включающий корпус, привод, колесо маховичное, подшипниковый узел, отличающийся тем, что в качестве привода содержит малогабаритный электродвигатель, для передачи крутящего момента от электродвигателя колесу дополнительно содержит сильфонную муфту. Недостатком аналога является неоптимальность конструкции, поскольку электродвигатель и маховичное колесо не объединены в одно устройство для получения минимальной массы устройства в целом.
Прототипом настоящего изобретения является Бесконтактная магнитоэлектрическая машина (Патент на изобретение №2354032, МПК H02K 21/12, H02K 29/00), содержащая якорь с числом зубцов Z1=m⋅Z1m⋅c, где m=2, 3, 4, 5, 6 … - число фаз обмотки якоря, каждая из фаз состоит из катушек, охватывающих по одному зубцу якоря, и индуктор с полюсами, отличающаяся тем, что катушечная группа фазы обмотки якоря состоит из одной катушки, сердечник индуктора состоит из скрепленных между собой первого и второго сердечников и намагниченного в осевом направлении постоянного магнита, расположенного между сердечниками индуктора, первый и второй сердечники индуктора размещены относительно друг друга так, что ось каждого зубца первого сердечника совпадает с осью каждого паза второго сердечника индуктора, бесконтактная магнитоэлектрическая машина состоит из модулей - «элементарных машин», число зубцов на любом сердечнике индуктора Z2N=Z2S=(m⋅Z1m±1)⋅c, где с=1, 2, 3, 4 … - число модулей, Z1m=l, 2, 3, 4 … - число зубцов фазы якоря в одном модуле. Недостатком прототипа является большая масса, связанная с наличием сердечника якоря. Обычно сердечник якоря необходим для улучшения магнитной проводимости якоря для магнитного потока индуктора и, в конечном итоге, для увеличения потокосцепления, ЭДС якоря и электромагнитной мощности двигателя-маховика. Применение современных высокоэнергетичных постоянных магнитов, создающих большой магнитный поток, позволяет обойтись без сердечника якоря.
Важными характеристиками двигателя-маховика являются: большой момент инерции ротора и высокая электромагнитная мощность, позволяющая создавать значительные положительные и отрицательные ускорения ротора. Одним из ограничивающих ускорение факторов является трение (механические потери) ротора.
Целью настоящего изобретения является создание двигателя-маховика, в котором индуктор (ротор) создан из скрепленных между собой сердечников и намагниченных в осевом направлении постоянных магнитов, расположенных между сердечниками индуктора, при этом сердечник якоря и подшипники отсутствуют.
Техническим результатом настоящего изобретения является создание двигателя-маховика, обладающего уменьшенной массой при сохранении значительного момента инерции индуктора (ротора) и высокой электромагнитной мощности.
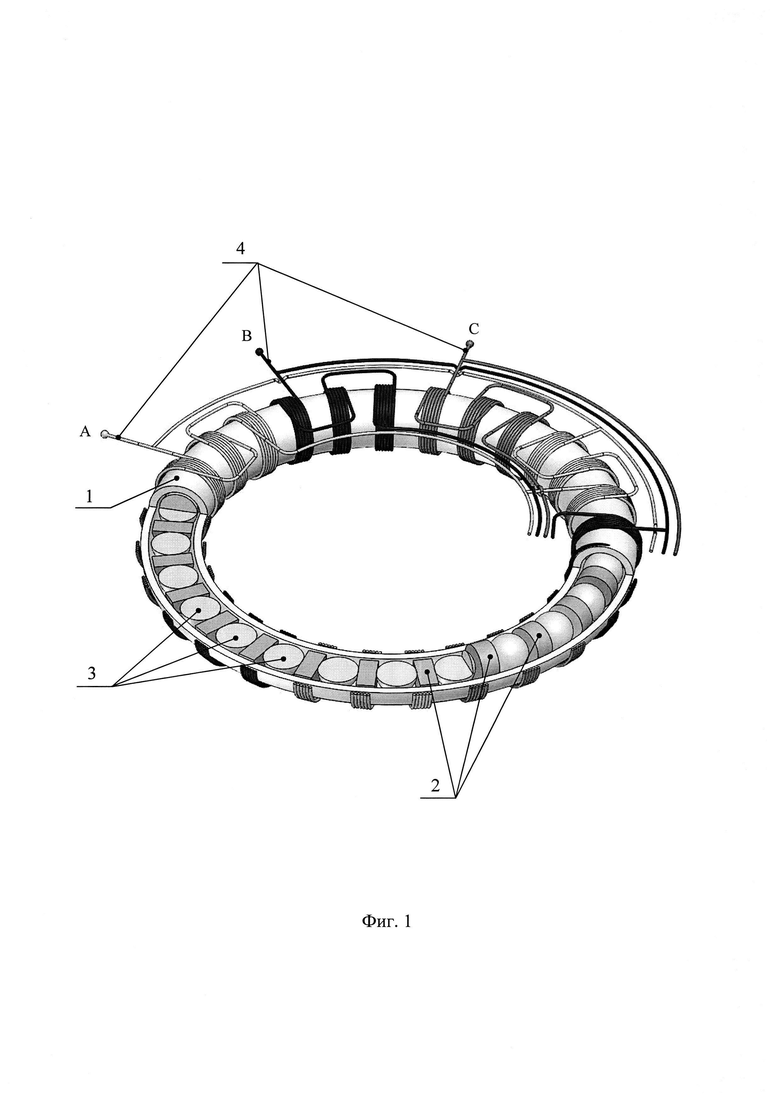
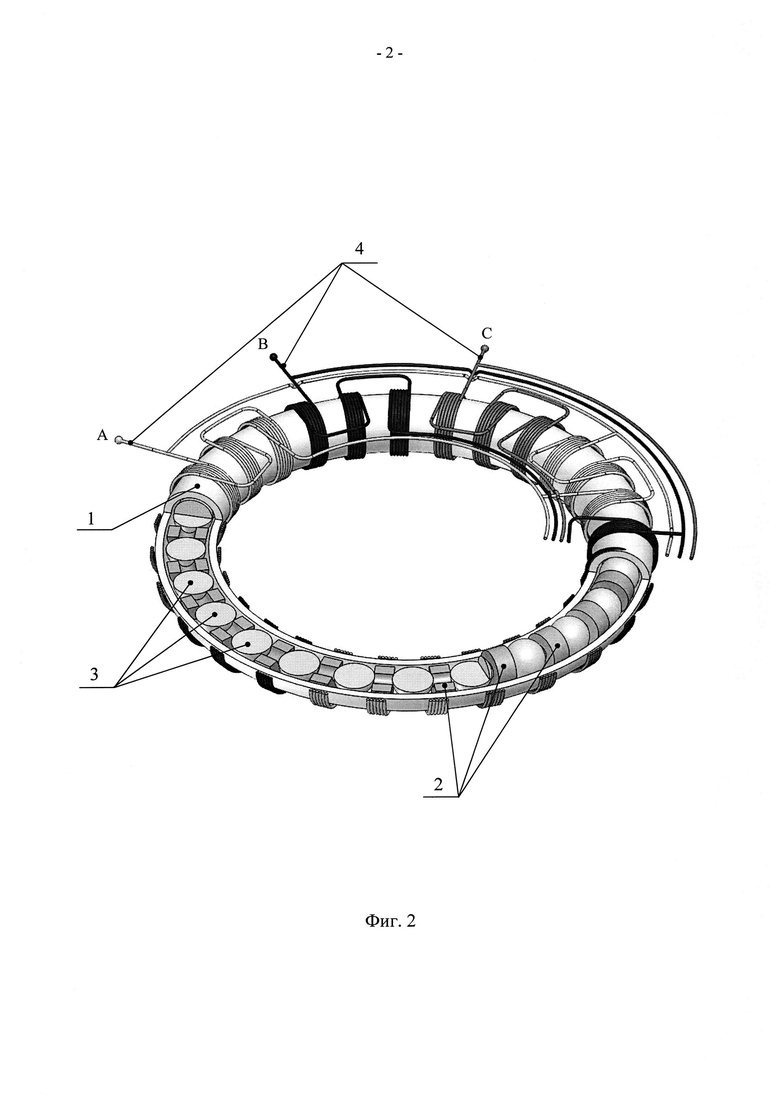
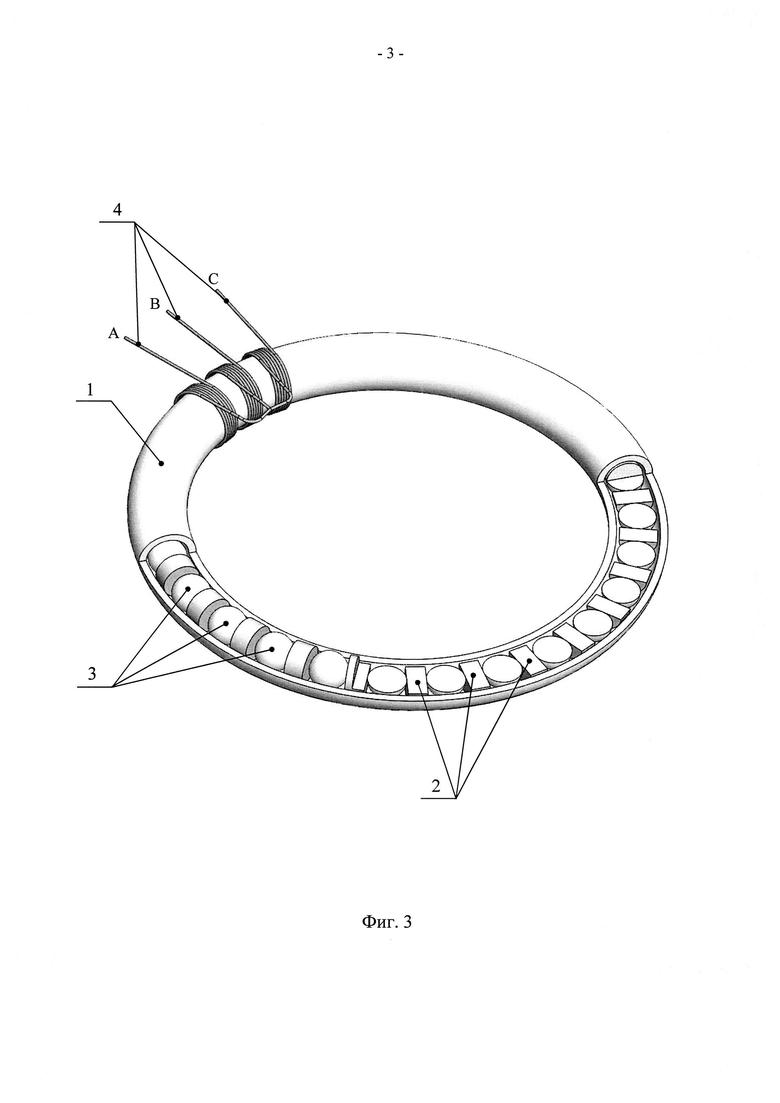
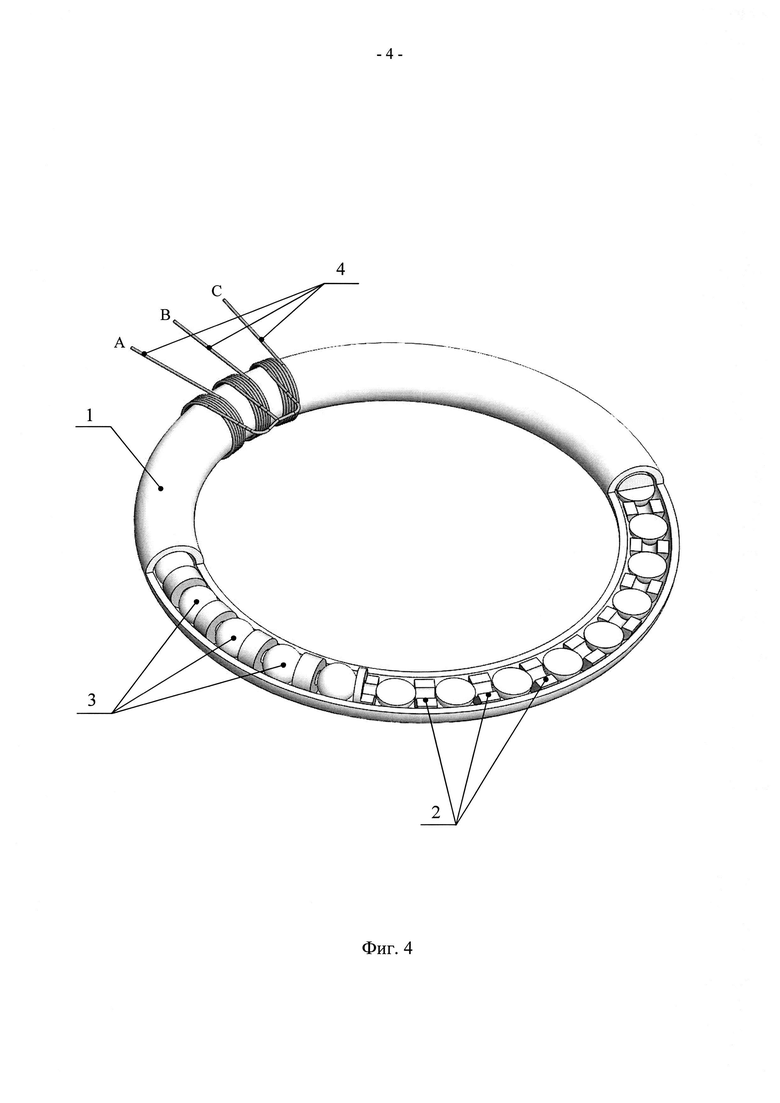
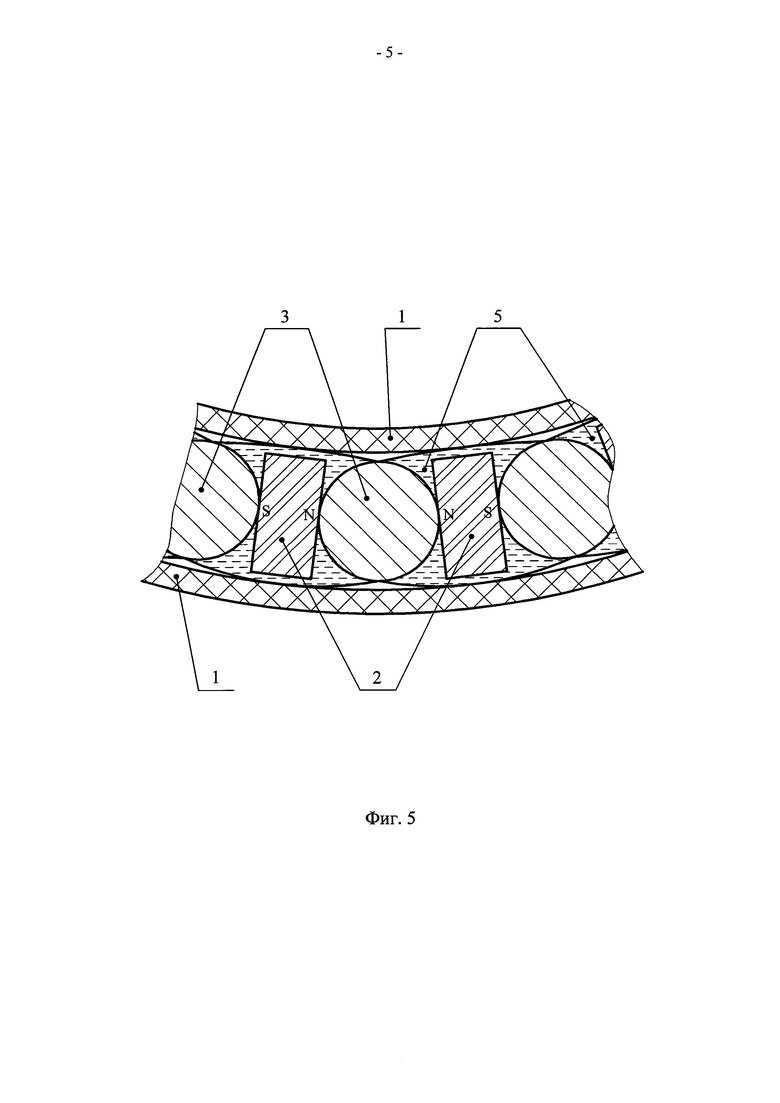
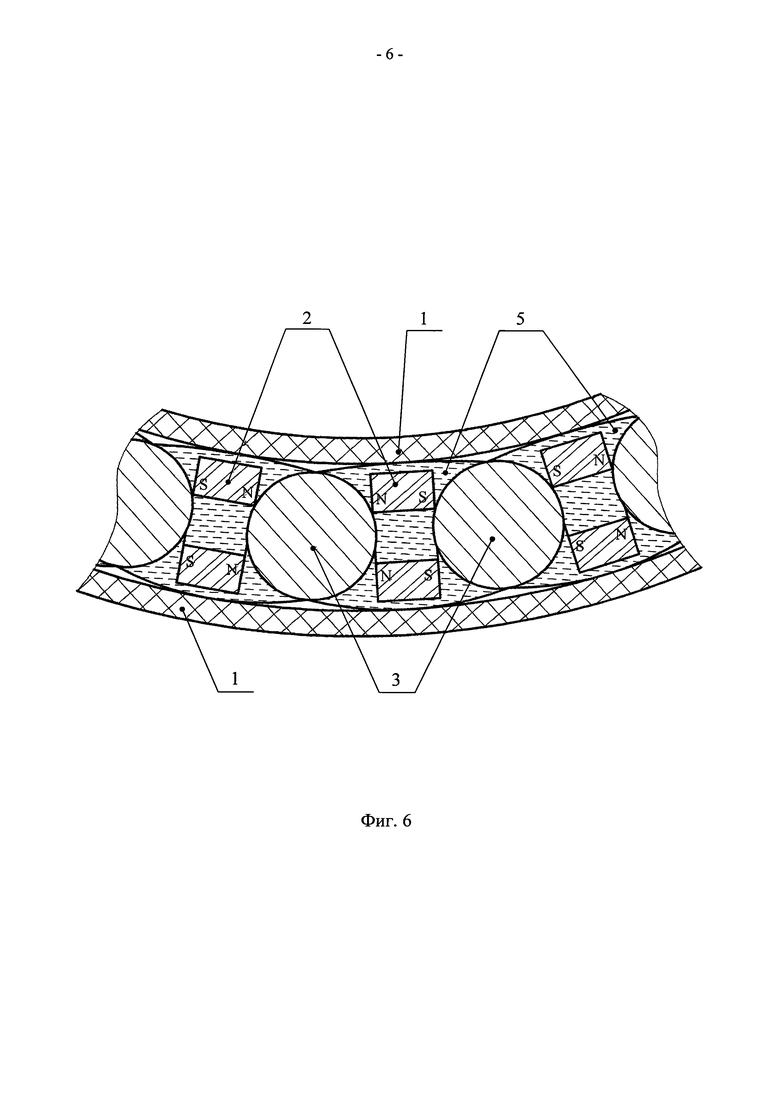
Конструкция двигателя-маховика показана на фигурах чертежей 1-6. Двигатель-маховик состоит из корпуса 1 из немагнитного материала, в форме полого тора кольцевого сечения, который жестко крепится к внешней конструкции. Внутри корпуса 1 выполнена камера, в камеру помещены постоянные магниты 2, намагниченные в осевом направлении. Между постоянными магнитами имеются магнитные (ферромагнитные) сердечники (вставки) в виде шариков 3.
На корпусе 1 двигателя-маховика жестко крепится обмотка статора 4. В качестве примера, на фигурах 1, 2, 3, 4 показана трехфазная обмотка статора 4, соединенная в звезду, где А, В, С - начала соответствующих фаз. Однако число m фаз обмотки может отличаться от трех (в частности, m=2, 4, 5, 6 …), число катушек обмотки статора также может быть другим и определяться при инженерном проектировании двигателя-маховика.
Намагниченные в осевом направлении постоянные магниты 2 могут иметь форму цилиндров (фиг. 1, 3, 5) или цилиндрических колец (фиг. 2, 4, 6). Катушки обмотки 4 якоря могут быть равномерно распределены по окружности корпуса 1 (фиг. 1, 2) или распределены внутри сектора (фиг. 2, 3).
Двигатель-маховик собирается следующим образом. Из четного числа постоянных магнитов 2 и четного числа сердечников, представляющих собой магнитные шарики 3, составляют развернутую в линию заготовку индуктора (ротора), которая составляет единое целое благодаря силам магнитного притяжения. Заготовкой для корпуса 1 служит труба круглого сечения из немагнитного материала, внутренний диаметр которой больше диаметра постоянных магнитов так, чтобы обеспечить свободное перемещение индуктора. Далее заготовку индуктора вставляют в заготовку корпуса и сворачивают их в форме тора. При этом концы заготовки индуктора соединяются сами посредством магнитных сил, а концы заготовки корпуса необходимо соединить между собой пайкой, сваркой или клеем. Для снижения трения индуктора (ротора) о корпус 1 внутрь него закладывается смазка 5 (фиг. 5, 6). Однако традиционная смазка, как правило, обеспечивает «всплывание» и низкий коэффициент трения индуктора о корпус 1 лишь при высоких скоростях вращения индуктора. По этой причине режим запуска двигателя-маховика является одним из самых тяжелых с точки зрения трения. В качестве смазки двигателя-маховика может быть также использована магнитная жидкость, используемая для создания Устройства для гашения низкочастотных вибраций (Патент на полезную модель №144547, МПК F16F 9/53, F16F 6/00). При обволакивании магнита магнитной жидкостью удается обеспечивать низкий коэффициент трения покоя индуктора (ротора) двигателя-маховика, а также низкий коэффициент трения при низких скоростях движения (вращения) индуктора. За счет этого у индуктора (ротора) двигателя-маховика с магнитной жидкостью в качестве смазки индуктора будут существенно уменьшены потери на трение о корпус 1 (механические потери) при нулевой и низких скоростях.
Технический результат настоящего изобретения достигается следующим образом. При подаче напряжения на катушки фаз обмотки 4 якоря (статора) по ним протекает ток, образуется магнитодвижущая сила (МДС) статора. При взаимодействии МДС статора с магнитным потоком высокоэнергетичных постоянных магнитов 2 индуктора, на индуктор действует электромагнитная сила, а поскольку индуктор представляет собой тор, состоящий из скрепленных между собой постоянных магнитов 2 и сердечников в виде шариков 3, то и вращающий момент. Под действием вращающего момента, индуктор вращается. Поскольку полярность постоянных магнитов чередующаяся, то магнитный поток постоянных магнитов 2 индуктора, сцепленный с обмоткой 4 якоря, изменяется от максимального положительного до максимального отрицательного значения, вследствие чего в обмотке 4 наводится ЭДС. Электромагнитная мощность представляет собой произведение тока обмотки 4 якоря на ЭДС. Потери на трение индуктора о корпус 1 минимальны благодаря применению смазки 5, в качестве которой может использоваться магнитная жидкость. Поскольку в предложенной конструкции отсутствует сердечник якоря и подшипники, то масса двигателя-маховика будет значительно меньше, чем у аналогичных электрических машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЬЦЕВОЙ ДВИГАТЕЛЬ-МАХОВИК | 2023 |
|
RU2799371C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2354032C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ДВОЙНОГО ВРАЩЕНИЯ | 2010 |
|
RU2437196C1 |
| МАХОВИК С МАГНИТНОЙ СМАЗКОЙ (ВАРИАНТЫ) | 2017 |
|
RU2658061C1 |
| ТОРЦЕВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2013 |
|
RU2541427C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2441308C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829315C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2829312C1 |
Изобретение относится к области электротехники, в частности к двигателям-маховикам, и может использоваться для систем ориентации и стабилизации космических аппаратов. Технический результат – уменьшение массы при сохранении значительного момента инерции индуктора и высокой электромагнитной мощности. Двигатель-маховик содержит якорь с m-фазной обмоткой, где m=2, 3, 4, 5, 6 …. - число фаз обмотки якоря, и индуктор с полюсами. Каждая из фаз состоит из катушек. Индуктор состоит из скрепленных между собой сердечников и намагниченных в осевом направлении постоянных магнитов, расположенных между сердечниками индуктора. При этом якорь и индуктор объединены между собой корпусом из немагнитного материала. Корпус представляет собой полый внутри тор кольцевого сечения. Катушки обмотки якоря закреплены с внешней стороны корпуса, а индуктор расположен внутри корпуса с возможностью вращения. Внутрь корпуса помещена смазка, которая представляет собой магнитную жидкость. 9 з.п. ф-лы, 6 ил.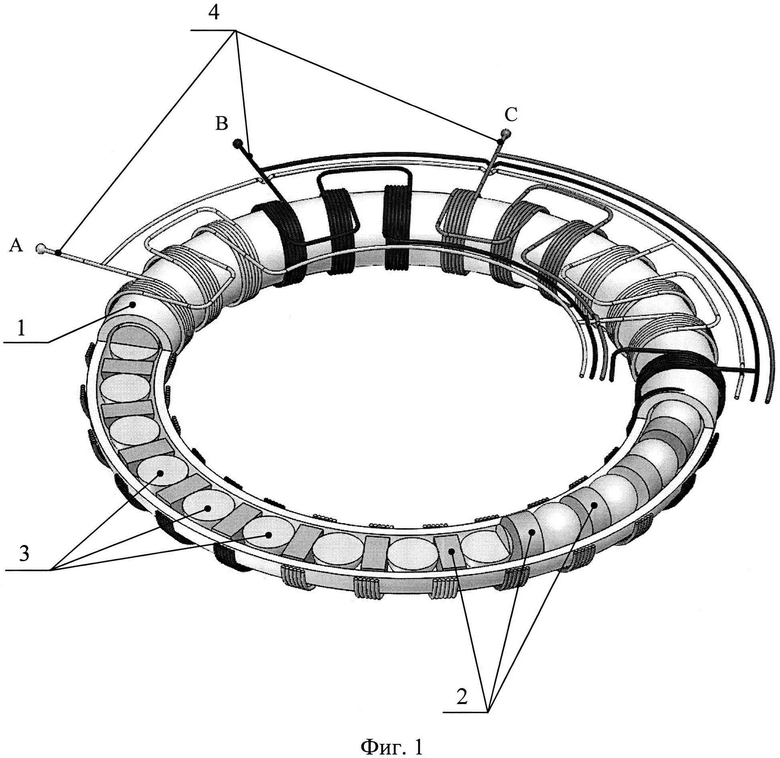
1. Двигатель-маховик, содержащий якорь с m-фазной обмоткой, m=2, 3, 4, 5, 6… - число фаз обмотки якоря, каждая из фаз состоит из катушек, и индуктор с полюсами, индуктор состоит из скрепленных между собой сердечников и намагниченных в осевом направлении постоянных магнитов, расположенных между сердечниками индуктора, отличающийся тем, что якорь и индуктор объединены между собой корпусом из немагнитного материала, корпус представляет собой полый внутри тор кольцевого сечения, катушки обмотки якоря закреплены с внешней стороны корпуса, а индуктор расположен внутри корпуса с возможностью вращения.
2. Двигатель-маховик по п. 1, отличающийся тем, что сердечники индуктора представляют собой магнитные шарики.
3. Двигатель-маховик по п. 1, отличающийся тем, что постоянные магниты индуктора представляют собой цилиндры.
4. Двигатель-маховик по п. 1, отличающийся тем, что постоянные магниты индуктора представляют собой цилиндрические кольца.
5. Двигатель-маховик по п. 1, отличающийся тем, что число постоянных магнитов индуктора является четным.
6. Двигатель-маховик по п. 1, отличающийся тем, что число сердечников индуктора является четным.
7. Двигатель-маховик по п. 1, отличающийся тем, что катушки обмотки якоря равномерно распределены по окружности корпуса.
8. Двигатель-маховик по п. 1, отличающийся тем, что катушки обмотки якоря распределены внутри сектора.
9. Двигатель-маховик по п. 1, отличающийся тем, что внутрь корпуса помещена смазка.
10. Двигатель-маховик по п. 9, отличающийся тем, что смазка представляет собой магнитную жидкость.
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2354032C1 |
| Оптическое устройство для передачи телевизионного изображения | 1960 |
|
SU134714A1 |
| КОЛЬЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ-МАХОВИК | 1986 |
|
SU1840218A1 |
| WO 2015192181 A1, 23.12.2015 | |||
| CN 102594009 A, 18.07.2012. | |||

