Область техники, к которой относится изобретение
Изобретение относится к системе и способу дистанционного наблюдения за транспортными средствами.
Уровень техники
Существующие механизмы управления и отслеживания положения транспортных средств не позволяют обеспечить достаточную надежность при использовании в определенных реальных системах. Например, в некоторых ситуациях получение координат, принимаемых от GPS-системы (системы глобального позиционирования) транспортного средства, может быть либо невозможно, либо может быть доступно с перерывами. Кроме того, координаты, принимаемые от GPS-системы, не позволяют получить контекстную информацию, характеризующую местоположение или условия работы транспортного средства, например, информацию о ближайших дорогах, ориентирах, дорожных условиях, поведении водителя и т.д. В связи с этим существует необходимость усовершенствования процесса определения местоположения и отслеживания транспортного средства. Например, необходимо усовершенствовать механизмы отслеживания угнанных транспортных средств, транспортных средств, управляемых неопытными водителями, прокатных транспортных средств и т.д. Кроме того, необходимы механизмы для автономных, полуавтономных и других визуальных/радиолокационных сенсорных систем безопасности. Также необходимы механизмы для определения схемы работы светофоров и управления транспортными средствами для сведения частоты торможения и расхода топлива к минимуму.
Раскрытие изобретения
Предложена система система для дистанционного наблюдения (мониторинга) за транспортными средствами, которая включает в себя компьютерный сервер с процессором и запоминающим устройством, на котором хранятся инструкции, исполняемые процессором, причем сервер выполнен с возможностью принимать аэроснимок, принимать данные, относящиеся к транспортному средству, принимать запрос изображения транспортного средства, идентифицировать транспортное средство на изображении, на основании, по крайней мере, фрагмента аэроснимка, на котором присутствует изображение транспортного средства, предоставлять информацию, содержащую этот фрагмент аэроснимка и/или местоположение транспортного средства, и/или маршрут транспортного средства, и/или событие, в котором участвует транспортное средство, и/или состояние транспортного средства.
Сервер может быть дополнительно выполнен с возможностью принимать аэроснимок от летательного аппарата, причем аэроснимок выполнен с помощью камеры, установленной на летательном аппарате.
Сервер может быть дополнительно выполнен с возможностью применять систему географических координат для анализа аэроснимка и по географическим координатам, указанным в данных о транспортном средстве, определять местонахождение транспортного средства на изображении.
Сервер может быть дополнительно выполнен с возможностью определять местонахождение транспортного средства на изображении по идентификационным отличительным знакам, которыми маркировано транспортное средство.
Аэроснимок может представлять собой движущееся изображение, и фрагмент аэроснимка, на котором изображено транспортное средство, может представлять собой движущееся изображение.
Сервер может быть выполнен с возможностью получать запрос от компьютера, расположенного в транспортном средстве, или от мобильного устройства пользователя.
Сервер может быть выполнен с возможностью накладывать фрагмент аэроснимка, на котором изображено транспортное средство, на карту области, в которой находится транспортное средство.
Предложен способ дистанционного наблюдения за транспортными средствами, в котором на сервере принимают аэроснимок, данные о транспортном средстве, и запрос изображения транспортного средства, идентифицируют транспортное средство на изображении, на основании, по крайней мере, фрагмента аэроснимка, на котором изображено транспортное средство, и предоставляют информацию, включающую в себя фрагмент аэроснимка и/или местоположение транспортного средства, и/или маршрут транспортного средства, и/или событие, в котором участвует транспортное средство, и/или состояние транспортного средства.
На сервере могут принимать аэроснимок, полученный с помощью камеры, расположенной на летательном аппарате.
Для анализа аэроснимка могут применять систему географических координат и определять местонахождение транспортного средства на изображении по географическим координатам, указанным в данных о транспортном средстве.
Транспортное средство могут маркировать с помощью идентификационных отличительных знаков, а на сервере определять местонахождение транспортного средства на изображении по указанным идентификационным отличительным знакам.
На сервере могут принимать запрос от компьютера, расположенного в транспортном средстве, или от мобильного устройства пользователя.
Можно накладывать фрагмент аэроснимка, на котором изображено транспортное средство, на карту области, в которой находится транспортное средство.
Предложена система для дистанционного наблюдения за транспортными средствами, которая включает в себя вычислительное устройство, выполненное с возможностью установки в транспортном средстве и имеющее процессор и запоминающее устройство, на котором хранятся исполняемые процессором инструкции для передачи устройством географических координат транспортного средства и его идентификатора, компьютерный сервер с процессором и запоминающим устройством, на котором хранятся исполняемые процессором инструкции, причем сервер выполнен с возможностью принимать аэроснимок, принимать данные, относящиеся к транспортному средству, принимать запрос изображения транспортного средства, идентифицировать транспортное средство на изображении и на основании, по крайней мере, фрагмента аэроснимка, на котором присутствует изображение транспортного средства, предоставлять информацию, содержащую этот фрагмент аэроснимка и/или местоположение транспортного средства, и/или маршрут транспортного средства, и/или событие, в котором участвует транспортное средство, и/или состояние транспортного средства.
Система может дополнительно включать в себя удаленное устройство пользователя, выполненное с возможностью принимать фрагмент аэроснимка, на котором изображено транспортное средство.
Краткое описание чертежей
Фиг. 1 представляет собой блок-схему примера системы для дистанционного наблюдения за транспортными средствами.
Фиг. 2 представляет собой блок-схему примера способа работы системы для дистанционного наблюдения за транспортными средствами.
Фиг. 3 представляет собой блок-схему примера способа получения данных от системы для дистанционного наблюдения за транспортными средствами.
Фиг. 4 представляет собой блок-схему первого примера способа использования данных от системы для дистанционного наблюдения за транспортными средствами в качестве исходных данных для эксплуатации транспортного средства в автономном режиме.
Фиг. 5 представляет собой блок-схему второго примера способа использования данных от системы дистанционного наблюдения для за транспортными средствами в качестве исходных данных для эксплуатации транспортного средства в автономном режиме.
Фиг. 6 представляет собой блок-схему примера способа предоставления транспортному средству и/или оператору транспортного средства рекомендаций, касающихся скорости движения.
Осуществление изобретения
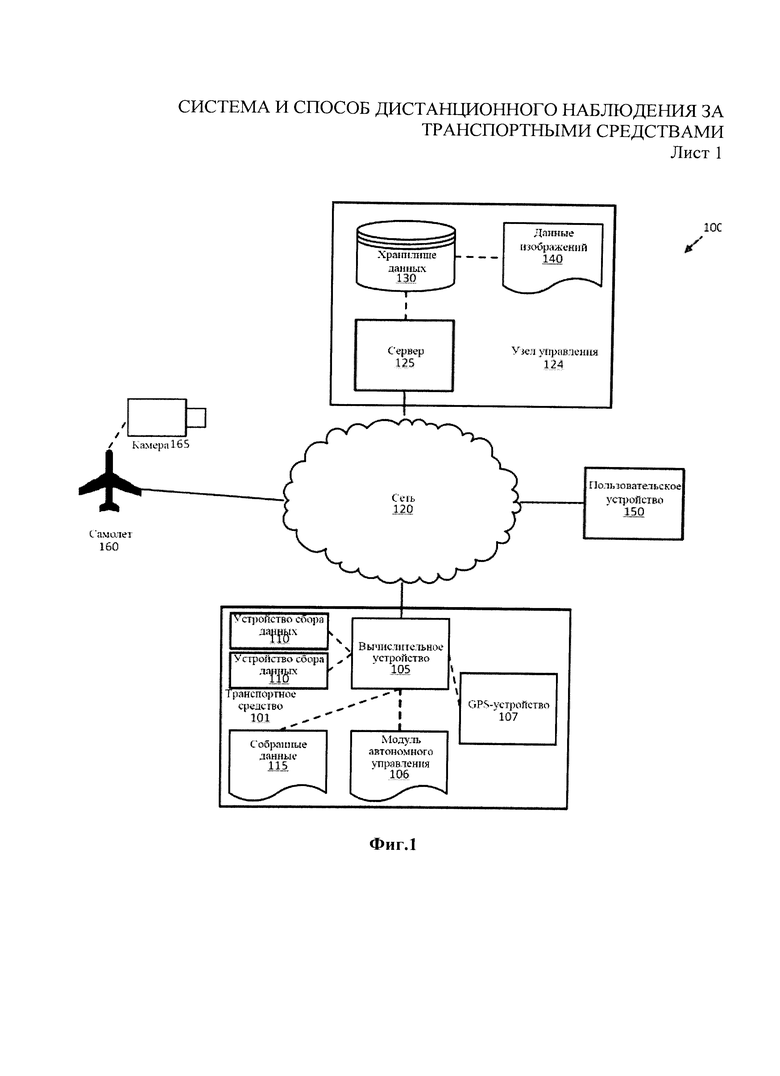
Фиг. 1 представляет собой схему примера системы 100 для дистанционного наблюдения за транспортными средствами. Компьютер 105 в транспортном средстве 101 может быть выполнен с возможностью обмена данными с одним или несколькими удаленными узлами, например, с сервером 125, через сеть 120, при этом такой удаленный узел может включать в себя хранилище 130 данных. Транспортное средство 101 включает в себя компьютер 105 транспортного средства, выполненный с возможностью приема информации, например, собранных данных 115, от GPS-устройства 107 и/или одного или нескольких устройств 110 сбора данных. Компьютер 105, как правило, включает в себя модуль 106 автономного управления, на котором хранятся инструкции для автономного, т.е. без участия оператора, управления транспортным средством 101, обычно используя информацию от устройств 110 сбора данных и включая действия, в частности, выполняемые в ответ на получение инструкций, принятых от сервера 125 на узле 124 управления.
Хранилище 130 данных, являющееся частью сервера 125 или соединенное с ним с возможностью обмена данными на узле 124 управления, может содержать данные 140 изображений, например, аэроснимок высокого разрешения некоторой географической области, полученный с помощью камеры или камер 165, установленных на одном или нескольких летательных аппаратах 160. Сервер 125 обычно обрабатывает данные 140 изображений вместе с собранными данными 115 для получения информации об одном или нескольких транспортных средствах 101. Например, сервер 125 может обнаруживать идентифицирующую информацию для транспортного средства 101, например, GPS-координаты транспортного средства 101 из собранных данных 115 для данного транспортного средства 101, визуальную идентифицирующую информацию для транспортного средства 101, получаемую от компьютера 105 и/или хранящуюся на сервере 125, связанную с идентификатором транспортного средства 101, например, с буквами, числами, символами и т.д., прикрепленным к верхней части транспортного средства 101. Затем сервер 125 может обнаруживать фрагмент данных 140 изображений, который включает в себя изображение транспортного средства 101.
Соответственно, изображение транспортного средства 101 и/или окружающей области может быть выдано на пользовательское устройство 150 и/или компьютер 105. Таким образом, система 100 может предоставлять важную информацию о транспортном средстве 101 для различных ситуаций, например, для отслеживания или определения местоположения угнанного транспортного средства 101, транспортного средства 101, управляемого несовершеннолетним водителем, для определения местоположения такси и т.д., для просмотра части или всего маршрута, по которому двигалось или будет двигаться транспортное средство 101, для определения дорожных условий, состояния дороги, например, для обнаружения ремонтируемых участков, дорожно-транспортных происшествий и т.д. Кроме того, система 100 может предоставлять информацию, необходимую для управления движением транспортного средства 101, например, при обнаружении опасных ситуаций на дороге, которые создают угрозу безопасности или препятствия, при управлении транспортным средством 101 в ограниченной области, например, на автомобильной стоянке, где могут находиться неотмеченные препятствия и т.д.
Система 100 может выдавать информацию как об одном транспортном средстве 101, например, о легковом автомобиле, грузовом автомобиле, водном судне, воздушном судне и т.д., так и о нескольких транспортных средствах 101. Как показано на Фиг. 1, транспортное средство 101 содержит компьютер 105, который, как правило, имеет процессор и запоминающее устройство, при этом запоминающее устройство включает в себя один или несколько типов машиночитаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, включая операции, раскрытые в данном описании изобретения. Кроме того, компьютер 105 может включать в себя или быть соединен с возможностью обмена данными с несколькими вычислительными устройствами, например, с контроллерами или их аналогами, установленными в транспортном средстве 101, для обеспечения контроля и/или управления различными компонентами транспортного средства, например, модулем управления двигателем (ECU), модулем управления коробкой передач (TCU) и т.д. Следует отметить, что, хотя для простоты на Фиг. 1 показано только одно транспортное средство 101, система 100 может и предназначена для обслуживания нескольких транспортных средств 101, т.е. тысяч, десятков тысяч или более.
Компьютер 105 и другие аналогичные вычислительные устройства в транспортном средстве 101 обычно выполнены с возможностью обмена данными с помощью шины локальной сети контроллеров (CAN) или ее аналога. Компьютер 105 также может быть соединен с системой бортовой диагностики (OBD-II). С помощью CAN-шины, OBD-II и/или других проводных или беспроводных систем компьютер 105 может передавать сообщения на различные устройства в транспортном средстве и/или получать сообщения от различных устройств, например, от контроллеров, исполнительных механизмов, датчиков и т.д., включая устройства НО сбора данных. В качестве альтернативы или дополнения в случаях, когда компьютер 105 включает в себя несколько устройств, CAN-шина или ее аналог может быть использована для обмена данными между устройствами, обозначенными в данном описании изобретения как компьютер 105. Кроме того, компьютер 105 может быть выполнен с возможностью обмена данными с сетью 120, которая, как описано ниже, может использовать различные проводные и/или беспроводные сетевые протоколы, например, сотовую связь, Bluetooth, проводные и/или беспроводные сети с коммутацией пакетов и т.д.
В компьютере 105 сохранены и выполняются инструкции, включающие в себя модуль 106 автономного управления. С помощью данных, полученных компьютером 105, например, от устройств 110 сбора данных, сервера 125 и т.д., модуль 106 может управлять различными компонентами и/или функциями транспортного средства 101 без участия оператора. Например, модуль 106 может быть использован для регулирования скорости, ускорения, замедления, работы системы рулевого управления транспортного средства 101 и таких компонентов, как фонари, стеклоочистители и т.д. Кроме того, модуль 106 может включать в себя инструкции для расчета и выполнения различных операций в автономном режиме на основании информации, принятой компьютером 105, например, от GPS-устройства 107 и/или устройств 110 сбора данных.
Обычно GPS-устройство 107 (устройство системы глобального позиционирования) используется для обмена данными с GPS-спутниками и определения местоположения, например, по географическим координатам транспортного средства 101, т.е. по широте и долготе. GPS-устройство 107 в транспортном средстве 101 может быть предназначено для определения местоположения, например, на карте, отображаемой GPS-устройством 107 и/или вычислительным устройством 105. Кроме того, GPS-устройство 107 может передавать данные о местоположении транспортного средства 101, например, географические координаты для транспортного средства 101, на сервер 125, например, по сети 120 и/или через вычислительное устройство 105.
Устройства 110 сбора данных могут представлять собой различные устройства. Например, различные контроллеры в транспортном средстве могут функционировать в качестве устройств 110 сбора данных для обеспечения передачи данных 115 по CAN-шине, например, данных 115 о скорости, ускорении транспортного средства и т.д. Кроме того, в транспортном средстве могут быть установлены датчики или их аналоги, используемые в качестве устройств 110 сбора данных для передачи данных непосредственно на компьютер 105, например, по проводному или беспроводному каналу связи. Сенсорные устройства 110 сбора данных могут представлять собой такие механизмы, как радиолокационные устройства, лазерные локаторы, звуковые эхолокаторы и т.д., которые могут быть использованы для измерения расстояния между транспортным средством 101 и другими транспортными средствами или объектами. В качестве еще одного примера сенсорных устройств 110 сбора данных можно привести камеры, алкогольно-респираторные трубки, датчики движения и т.д., т.е. устройства 110 сбора данных, которые передают данные с целью предоставления информации об операторе и/или пассажире транспортного средства 101.
Собранные данные 115 хранятся на запоминающем устройстве компьютера 105. Собранные данные 115 могут представлять собой различные данные, полученные в транспортном средстве 101, включая информацию о местоположении, например, географические координаты, полученные с помощью GPS-устройства 107. Помимо указанных выше данных 115, в качестве примера можно привести данные, собранные с помощью одного или нескольких устройств 110 сбора данных, а также полученные с их помощью расчетные данные, хранящиеся в компьютере 105 и/или на сервере 125. В общем случае собранные данные 115 могут представлять собой данные, которые могут быть получены устройством 110 сбора данных и/или вычислены на основании таких данных. Например, собранные данные 115 могут включать в себя данные о выполняемых операциях и/или рабочих характеристиках транспортного средства 101, а также об условиях окружающей среды, дорожных условиях и т.д., влияющих на работу транспортного средства 101. Как описано выше и обсуждается далее, на сервер 125 обычно выдаются определенные собранные данные 115, например, GPS-координаты, сопоставленные с уникальным или в значительной степени уникальным идентификатором транспортного средства 101, предоставляющего собранные данные 115.
Сеть 120 представляет собой один или несколько механизмов, с помощью которых компьютер 105 транспортного средства может обмениваться данными с удаленным сервером 125. Соответственно, сеть 120 может представлять собой один или несколько проводных или беспроводных механизмов передачи данных, включая любое необходимое сочетание проводных (например, кабель и оптоволокно) и/или беспроводных (например, сотовая, беспроводная, спутниковая, микроволновая связь и радиочастотный канал) механизмов передачи данных и любую необходимую топологию сети (или топологии при использовании нескольких механизмов передачи данных). К сетям, обеспечивающим передачу данных, можно отнести беспроводные сети передачи данных (например, через Bluetooth, IEEE 802.11 и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включая сеть Интернет.
Хотя для простоты на Фиг. 1 показан только один узел 124 управления, в системе 100 может быть (и, скорее всего, будет) использовано несколько узлов 124 управления и несколько серверов 125. Например, в определенной географической области первый узел 124 управления может быть предназначен для выдачи информации и/или инструкций модулям 106 в компьютерах 105 транспортного средства 101 для управления транспортным средством в автономном режиме движения (далее - автономное транспортное средство). Второй узел 124 управления может быть предназначен для получения, анализа и передачи данных 140 изображений. В качестве альтернативы или дополнения несколько узлов 124 управления в географической области могут быть использованы для обеспечения надежности, получения дополнительной информации и т.д.
Узел 124 управления может включать в себя один или несколько компьютерных серверов 125, каждый из которых обычно включает в себя по крайней мере один процессор и по крайней мере одно запоминающее устройство, при этом на запоминающем устройстве хранятся инструкции, исполняемые процессором, включая инструкции для выполнения различных этапов и способов, раскрытых в данном описании изобретения. Сервер 125 может включать в себя или может быть подключен к хранилищу 130 данных для хранения собранных данных 115 и/или данных 140 изображений. Например, с течением времени собранные данные 115 о координатах транспортного средства 101, полученных от GPS-системы, могут многократно сохраняться в хранилище 120 данных. Сервер 125 может включать в себя или может быть подключен к радиочастотному (RF) устройству, позволяющему обмениваться данными с летательным аппаратом 160. Данные 140 изображений, полученные камерой 165 с помощью RF-канала или иного способа, например, по сети 120, могут быть сохранены в хранилище 130 данных, например, в виде фрагментов данных, полученных после анализа и/или обработки сервером 125.
Пользовательское устройство 150 может представлять собой любое вычислительное устройство, в состав которого входит процессор и запоминающее устройство, а также средства связи. Например, пользовательским устройством 150 может быть мобильный или портативный компьютер, планшетный компьютер, смартфон и т.д., которые имеют средства беспроводной связи, использующие протоколы сотовой связи, IEEE 802.11 и/или Bluetooth. Также пользовательское устройство 155 может использовать такие средства связи для обмена данными по сети 120, например, с сервером 125. Например, пользовательское устройство 150 может получать доступ к учетной записи пользователя или ее аналогу, хранящейся на сервере 125, и/или доступ к серверу 125 для получения данных 140 изображений, включая фрагменты данных 140 изображений, принятых от камеры 165, которые сервер 125 уже проанализировал и/или обработал, как будет описано ниже.
Пользовательское устройство 150 также может обмениваться данными по сети 120 и/или напрямую с компьютером 105 транспортного средства, например, с помощью Bluetooth. Соответственно, пользовательское устройство 150 может быть использовано для выполнения функций устройства 110 сбора данных, например, функций системы глобального позиционирования (GPS) и т.д., при этом пользовательское устройство 150 будет использовано для предоставления данных 115 компьютеру 105. Кроме того, пользовательское устройство 150 может быть использовано в качестве человеко-машинного интерфейса (HMI) для компьютера 105.
Летательный аппарат 160 может представлять собой автономный летательный аппарат или его аналог, например, известный из уровня техники «беспилотный летательный аппарат», и может летать на больших высотах, например, 33 ООО футов и более, в течение длительных периодов времени, например, нескольких недель или месяцев. Летательный аппарат 160 может работать и управляться в соответствии со способами, известными из уровня техники, например, с помощью узла 124. Соответственно, летательный аппарат 160, возможно, вместе с одним или несколькими другими летательными аппаратами 160 (для простоты на Фиг. 1 показан только один летательный аппарат 160), может предоставлять данные 140 изображений об определенной географической области для одного или нескольких удаленных узлов 124. Как было сказано выше, между летательным аппаратом 160 и узлом 124 может быть установлен выделенный RF-канал. Соответственно, для приема данных 140 изображений от камеры 165 и для выдачи таких данных 140 изображений на сервер 125 узла 124 управления летательный аппарат 160 может включать в себя вычислительное устройство или его аналог.
Обычно для сбора данных 140 изображений на летательном аппарате 160 установлена одна или несколько камер 165. Например, камера 165 может представлять собой известное из уровня техники устройство для фиксации неподвижного и/или движущегося изображения высокого разрешения земли и объектов на земле под летательным аппаратом 160. Кроме того, камера 165 может использовать различные известные технологии для работы не только при благоприятных условиях, например, в темноте, при наличии облаков и т.д. Например, для повышения качества изображения при наличии облаков, плохой освещенности и т.д. камера 165 может использовать радиолокатор с синтезированной апертурой (SAR), технологию получения изображений в инфракрасном свете и т.д.
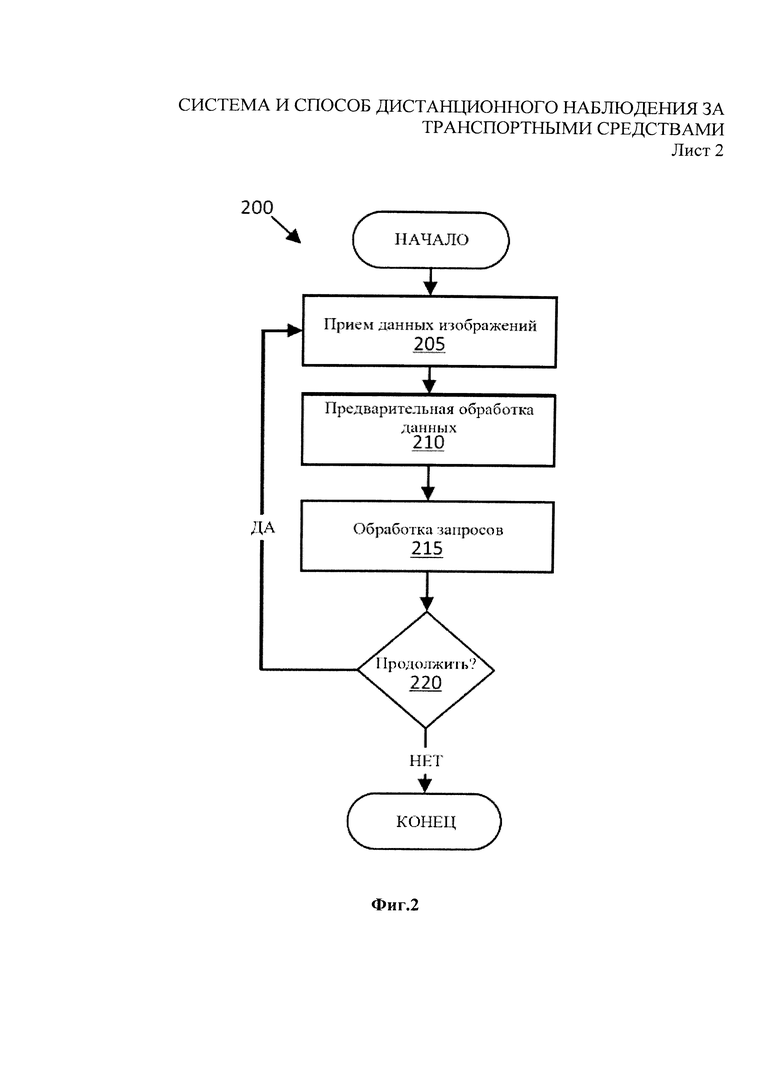
Фиг. 2 представляет собой блок-схему примера способа 200 работы системы дистанционного наблюдения за транспортными средствами 101. Следует отметить, что, хотя выше описано транспортное средство 101, представляющее собой автономное транспортное средство, система 100 может включать в себя транспортные средства 101, не оборудованные компонентами для работы в автономном режиме, например, модулем 106 автономного управления, устройствами 110 сбора данных, используемыми для предоставления информации, необходимой для работы в автономном режиме, и т.д. Более того, во время использования системы 100 транспортное средство 101, в котором предусмотрена возможность работы в автономном режиме, может работать и в неавтономном режиме.
Способ 200 начинается с этапа 205, на котором сервер 125 принимает данные 140 изображений от летательного аппарата 160. Как было сказано выше, для обмена данными, включая передачу данных 140 изображений и/или информации, касающейся состояния, работы и других параметров летательного аппарата 160, между удаленным узлом 124 и летательным аппаратом 160 может быть установлен выделенный RF канал.
Затем на этапе 210 сервер 125 может сохранять данные 140 изображений в хранилище 130 данных и/или выполнять предварительную обработку, например, обработку данных 140 изображений, выполняемую до приема запроса данных 140 изображений от любого пользователя. Например, сервер 125 может разбивать изображения географической области на небольшие фрагменты, может увеличивать или иным образом предоставлять подробную информацию об изображении или его элементах, может сопоставлять координаты на изображении или изображениях с географическими координатами и т.д. В общем случае для работы с данными 140 аэроснимка, полученного с летательного аппарата 160, сервер 125 использует систему географических координат, что позволяет определить местоположение транспортного средства 101 по географическим координатам, выдаваемым транспортным средством 101 и/или получаемым с помощью отличительных знаков, прикрепленных к транспортному средству 101.
Затем на этапе 215 сервер 125 может обрабатывать запросы данных 140 изображений, например, принятых от одного или нескольких пользовательских устройств 150, которые соотнесены с одним или несколькими транспортными средствами 101. Обработка запросов будет описана более подробно ниже со ссылкой на способ 300 с Фиг. 3.
На этапе 220, выполняемом после этапа 215, сервер 125 определяет, нужно ли продолжать выполнение способа 200. В общем случае способ 200 выполняется на сервере или кластере серверов 125 непрерывно или практически непрерывно. Кроме того, следует понимать, что этапы 205, 210, 215, описанные выше, могут выполняться одновременно или практически одновременно для нескольких наборов данных 140 изображений и/или запросов предоставления данных 140 изображений. Безусловно, способ 200 не будет выполняться бесконечно. Например, сервер 125 может быть выключен или отключен от сети на время проведения профилактических работ и т.д. В любом случае, способ 200 возвращается на этап 205 для продолжения работы или завершается.
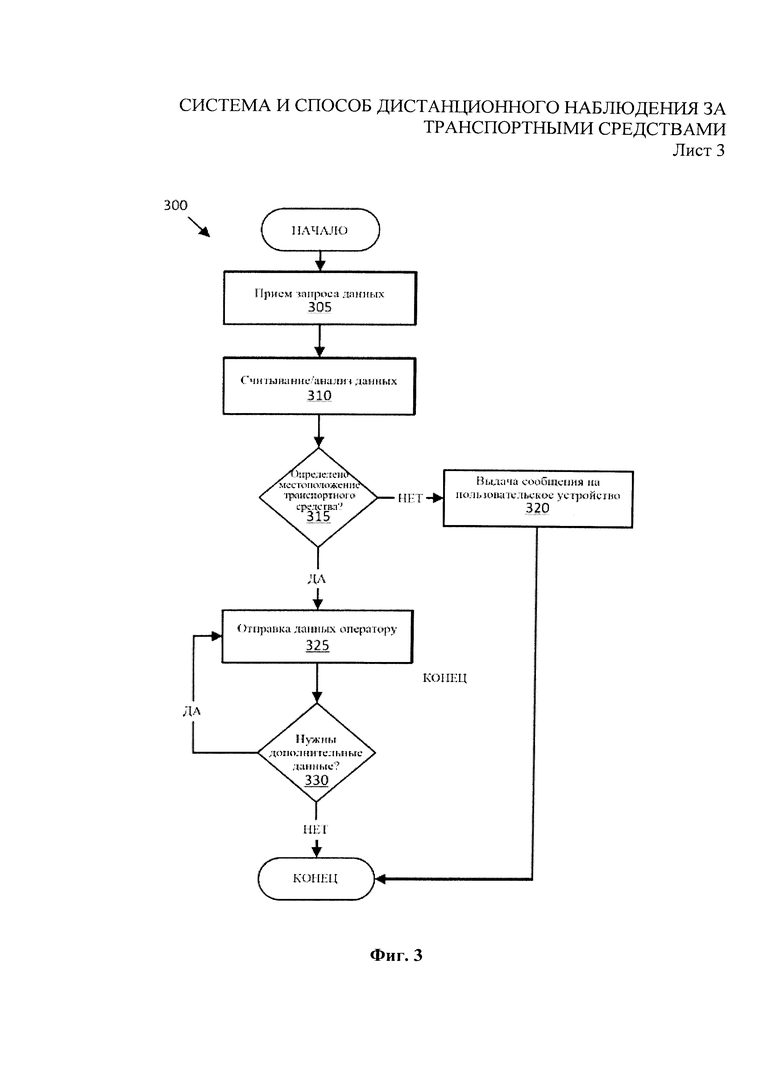
Фиг.3 представляет собой блок-схему примера способа 300 получения данных от системы для дистанционного наблюдения за транспортными средствами.
Способ 300 начинается с этапа 305, при этом следует понимать, что перед этим в рамках способа 300 сервер 125 принимает и/или предварительно обрабатывает данные 140 изображений, как описано выше со ссылкой на этапы 205, 210 способа 200. На этапе 305 сервер 125 определяет, был ли принят запрос данных о транспортном средстве 101, например, от пользовательского устройства 150. Как было сказано выше, пользовательское устройство 150 имеет право на получение доступа к серверу 125 в соответствии с учетной записью пользователя или ее аналогом. Например, для получения данных 140 изображений о транспортном средстве 101 или транспортных средствах 101 пользователь может иметь подписку и или ее аналог. Соответственно, в запросе данных 140 изображений может быть указана учетная запись пользователя и/или идентификатор пользователя, связанный с запросом и/или идентификатором транспортного средства 101, например, идентификационным номером транспортного средства (VIN), для которого запрашиваются данные 140 изображений. В запросе также могут быть указаны тип запрашиваемых данных 140 изображений, например, неподвижное изображение, движущееся изображение и т.д. Кроме того, в запросе могут быть указаны другие запрашиваемые данные, например, необходимость наложения картографической информации на изображение, например, названий улиц, названий ориентиров, топографических особенностей, например, рек, государственных границ и т.д.
Запрос также может содержать временную метку и/или дополнительный индикатор, указывающий временной период, к которому относятся запрашиваемые данные о транспортном средстве 101.
Например, если транспортное средство 101 попало в аварию, например, столкнулось с другим транспортным средством или попало в другое дорожно-транспортное происшествие, транспортное средство 101 может отправить сообщение на сервер 125 о том, что транспортное средство 101 попало в аварию. Затем при обнаружении и предоставлении запрашиваемых данных, что будет подробно описано далее со ссылкой на способ 300, сервер 125 может включать в себя данные, полученные в пределах некоторого промежутка времени относительно временной метки, соответствующей моменту аварии, например, в пределах одной минуты до и после события и т.д.
При отсутствии запроса на этапе 310 способ 300 возвращается на этап 305. Однако при наличии такого запроса способ 300 переходит на этап 315.
Затем на этапе 310 в ответ на запрос, принятый на этапе 305, сервер 125 считывает данные 140 изображений и пытается определить местоположение транспортного средства 101, указанного в запросе. Например, сервер 125 может принимать собранные данные 115 от транспортного средства 101, т.е. от транспортного средства, указанного в запросе, включая географические координаты или другие данные, характеризующие местоположение транспортного средства 101. Соответственно, сервер 125 может выявить фрагмент данных 140 изображений, содержащий информацию о местоположении транспортного средства 101, а может даже выделить или иным образом указать положение изображения транспортного средства 101, например, с помощью круга вокруг данного места и стрелки, указывающей на него, и т.д., наложенных на фрагмент данных 140 изображений. В качестве альтернативы или дополнения к транспортному средству 101 могут быть прикреплены, например, на крышу транспортного средства 101, отличительные знаки, например, буквы, числа, символы и т.д., аналогичные отличительным знакам, используемым для транспортных средств правоохранительных органов. Сервер 125 может использовать технологии обработки изображений для распознавания таких идентификационных отличительных знаков, а, следовательно, может считывать соответствующий фрагмент данных 140 изображений и/или выделять изображение, и/или местоположение транспортного средства 101.
Более того, при обнаружении запроса, например, запроса данных об области вокруг места происшествия и т.д. в соответствии с приведенным выше описанием, сервер 125 может считывать данные 140 изображений, например, видеопоток и/или серии неподвижных изображений для временного промежутка, указанного в запросе. Такие данные 140 изображений могут быть особенно полезны для страховых компаний, сотрудников правоохранительных органов и т.д. при оценке аварии, в которую попало транспортное средство 101.
Также на этапе 310 сервер 125 может выполнять анализ данных 140 изображений для транспортного средства 101. Например, технологии распознавания изображения могут быть использованы для определения дорожных условий, обнаружения ремонтируемых участков дороги и т.д., которые могут быть использованы транспортным средством 101. Например, технологии распознавания изображения могут быть использованы для обнаружения заторов и/или ремонтируемых участков дороги на изображении 140 таким образом, чтобы транспортному средству 101 могло быть выдано предупреждение об ухудшении условий или замедлении движения по запланированному маршруту. Аналогичным образом для идентификации события, в котором участвует одно или несколько транспортных средств 101, например, столкновения, нарушения правил дорожного движения и т.д., могут быть использованы технологии анализа изображения.
На этапе 315, выполняемом после этапа 310, сервер 125 определяет, было ли на этапе 310 определено местоположение транспортного средства 101, указанного в запросе, принятом на этапе 305. В качестве альтернативы или дополнения сервер 125 может определять, можно ли обнаружить событие, например, столкновение. В любом случае, при возможности обнаружения данных 140 изображений, запрашиваемых на этапе 305, следующим будет выполнен этап 325. В противном случае после этого выполняется этап 320.
На этапе 320 в ответ на запрос, полученный на этапе 305, сервер 125 выдает на пользовательское устройство 150 сообщение о том, что местоположение транспортного средства 101, указанного в запросе, не может быть определено. Затем способ 300 завершается.
На этапе 325, который может быть выполнен после этапа 315, в ответ на запрос, принятый на этапе 310, сервер 125 отправляет на пользовательское устройство 150 набор данных 140 изображений, полученный в соответствии с описанием, приведенным выше со ссылкой на этап 315. В общем случае, но это необязательно, пользовательское устройство 150, принимающее данные 140 изображений на этапе 315, является тем же пользовательским устройством 150, которое запрашивало данные 140 изображений на этапе 310. Пользовательское устройство 150 может отображать данные 140 изображений. Кроме того, пользовательское устройство 150 может отображать несколько изображений 140, например, изображений 140 различных транспортных средств 101. Например, пользовательское устройство 150 может иметь многоэкранный дисплей или дисплей с разделенным экраном с возможностью отображения нескольких, например, десятков, тысяч транспортных средств 101 и более, например, если пользовательское устройство приняло изображения 140 для шестнадцати различных транспортных средств 101, то изображения 140 могут быть выведены в виде сетки четыре на четыре с каждым транспортным средством 101, отмеченным с помощью номера, имени пользователя и т.д., при этом картографические данные могут быть наложены на изображения 140 таким образом, чтобы указывать местоположение и/или географическую контекстную информацию для каждого транспортного средства 101.
Как было сказано выше, данные 140 изображений, отображаемые с помощью пользовательского устройства 150, могут включать в себя выделение или другой индикатор местоположения транспортного средства 101. Кроме того, данные 140 изображений могут включать в себя метаданные, например, названия улиц, названия ориентиров и т.д., наложенные на изображение, включая транспортное средство 101 таким образом, чтобы предоставить контекстную информацию и лучше отобразить местоположение транспортного средства 101. При использовании данных 140 движущихся изображений или серии неподвижных изображений 140 наложенные картографические данные могут корректироваться вместе с изменением местоположения транспортного средства 101. Аналогичным образом данные 140 изображений могут быть выданы на компьютер 105 в транспортном средстве 101 и наложены на картографические или навигационные данные, отображаемые на дисплее компьютера 105. Более того, ответ на запрос, содержащий данные 140 изображений, может включать в себя другую информацию, например, вероятное время прибытия транспортного средства 101 в конкретное место, альтернативные маршруты для транспортного средства 101 и т.д.
Затем на этапе 330 сервер 125 определяет, принял ли он дополнительные данные, которые должны быть отправлены на пользовательское устройство 150 в ответ на запрос.Например, если сервер 125 выдает данные 140 движущихся изображений на устройство 150, например, поток видеоданных в соответствии с форматом MPEG (экспертная группа по вопросам движущегося изображения) или его аналогом, способ 300 может вернуться на этап 325 для отображения дополнительных потоковых видеоданных 140. Аналогичным образом, если сервер 125 выдает серию данных 140 неподвижных изображений на устройство 150, способ 300 может вернуться на этап 325 для отображения дополнительных данных 140 неподвижных изображений. Например, в запросе может быть указано, что необходимо отправить обновления или уведомления. Например, обновленные изображения 140 транспортного средства 101 могут выдаваться в ответ на запрос с определенной периодичностью, например, каждые пять минут, каждые 10 минут и т.д. Аналогичным образом данные уведомления могут быть отправлены вместе с изображением 140 транспортного средства 101, когда транспортное средство 101 находилось в месте, указанном в запросе, пересекало границу, указанную в запросе, двигалось до или после момента, указанного в запросе и т.д.
При отсутствии дополнительных данных 140, которые необходимо отправить на пользовательское устройство, после этапа 330 способ 300 завершается.
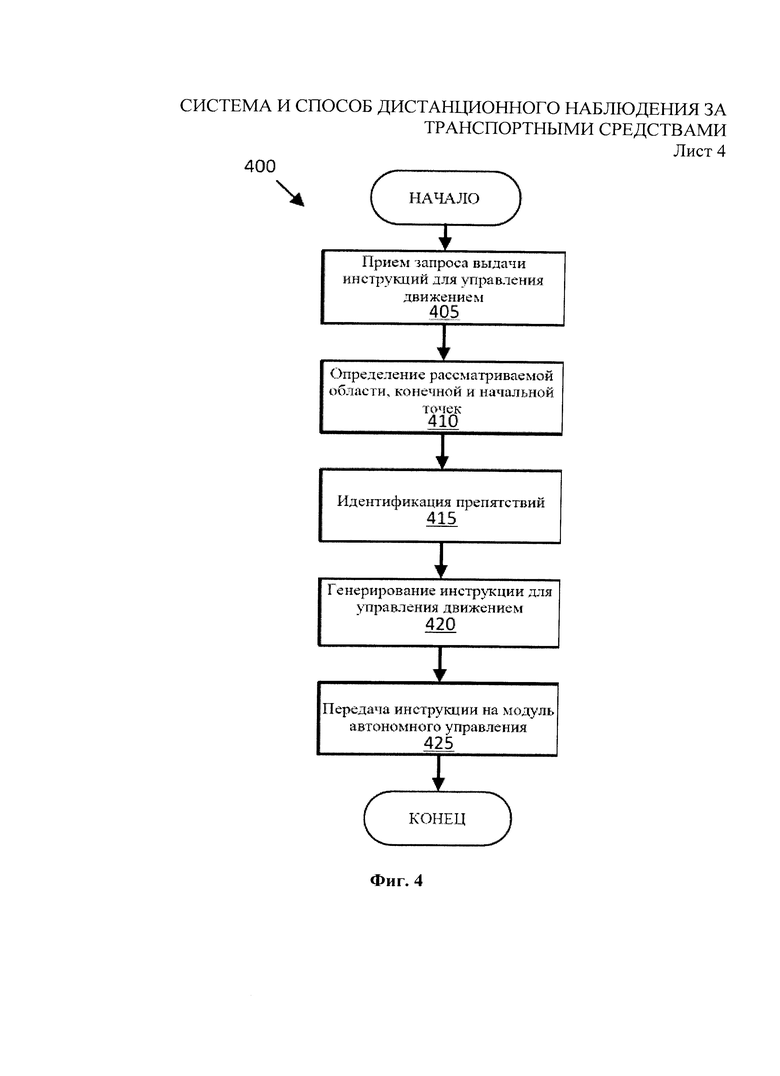
Фиг. 4 представляет собой блок-схему первого примера способа 400 использования данных от системы для дистанционного наблюдения за транспортными средствами в качестве исходных данных для эксплуатации транспортного средства в автономном режиме.
Способ 400 начинается с этапа 405, на котором сервер 125 принимает запрос о помощи в навигации от компьютера 105 в транспортном средстве 101. Например, автономное транспортное средство 101 может двигаться в области, в которой невозможно проложить маршрут по карте, географическим координатам и т.д. В качестве примера такой области можно указать автомобильную стоянку, когда машины, ограждения и т.д. создают препятствия для перемещения к выезду с автомобильной стоянки, когда такие препятствия обычно не указаны на карте вообще или не могут быть определены в качестве ориентиров с определенными географическими координатами. Другим примером такой области является область, в которой автономному транспортному средству 101 может понадобиться помощь при движении, когда транспортное средство 101 находится рядом или окружено другими объектами, мимо которых транспортное средство 101 должно проехать, чтобы двигаться по выбранному маршруту. Например, на автомобильной стоянке автономное транспортное средство 101 может находиться между тележками для товаров или другими объектами, мешающими автономному транспортному средству двигаться в нужном направлении.
В любом случае компьютер 105 в автономном транспортном средстве 101 может быть выполнен с возможностью запроса дополнительной навигационной помощи от сервера 125, когда автономное транспортное средство 101 не может определить, как двигаться дальше. Такой запрос навигационной помощи обычно включает в себя идентификатор для транспортного средства 101, географические координаты и/или идентификацию отличительных знаков или меток на транспортном средстве 101, а также место назначения или точку на маршруте транспортного средства 101, к которой компьютер 105 не может проложить маршрут.
Затем на этапе 410 сервер 125 определяет рассматриваемую область для автономного транспортного средства 101, которая указана в запросе, принятом на этапе 405. Например, сервер 125 может принимать географические координаты или аналогичные данные для транспортного средства 101 и/или может определять местоположение транспортного средства 101 с помощью отметок на транспортном средстве 101, как было описано выше. В любом случае, после обнаружения местоположения транспортного средства 101 сервер 125 может использовать технологии распознавания изображения для определения типа области, в которой находится транспортное средство 101, например, автомобильной стоянки, городской улицы и т.д. Затем сервер 125 может определять рассматриваемую область вокруг транспортного средства 101, зная точку отправления, т.е. текущее положение транспортного средства 101, определенное как было сказано выше, а также целевую точку назначения, например, конечный пункт назначения, точку на маршруте транспортного средства 101 и т.д. Другими словами, рассматриваемая область вокруг транспортного средства 101 обычно представляет собой круг, внутри которого находится транспортное средство 101, при этом радиус данного круга превышает расстояние до целевого пункта назначения или конечной точки.
Затем на этапе 415 сервер 125 анализирует данные 140 изображений о рассматриваемой области, определенной на этапе 410, для обнаружения объектов, например, таких неподвижных конструкций, как стены, бордюры и т.д., и/или таких подвижных объектов, как тележки для товаров, велосипеды, стоящие или движущиеся транспортные средства и т.д. Другими словами, сервер 125 может использовать технологии распознавания изображения для идентификации ограждений или препятствий, мешающих дальнейшему движению транспортного средства 101. Например, движение по заставленной автомобильной стоянке может представлять собой некое подобие лабиринта. Сервер 125 может обнаруживать ряды припаркованных автомобилей и/или таких ограждений, как лавки, стены, бордюры, образующие «стенки» данного лабиринта. Аналогичным образом сервер 125 может обнаруживать тележку для товаров или аналогичный объект, находящийся рядом с транспортным средством 101.
Затем на этапе 420 сервер 125 генерирует навигацию к цели поездки для транспортного средства 101, например, инструкции для транспортного средства 101, следуя которым оно сможет переместиться из текущего местоположения в целевую конечную точку. Соответственно, сервер 125 может генерировать для компьютера 105 предлагаемый маршрут в рассматриваемую конечную точку, например, в точку выезда с автомобильной стоянки на городскую улицу, инструкции, касающиеся управления, например, слабый удар о тележку для товаров для продвижения по маршруту и т.д.
Затем на этапе 425 сервер 125 выдает компьютеру 105 в транспортном средстве 101 инструкции для управления движением, сгенерированные в соответствии с приведенным выше описанием этапа 420. В качестве альтернативы или дополнения сервер 125 может выдавать информацию о типе и/или местоположении препятствий для транспортного средства 101, сгенерированную в соответствии с приведенным выше описанием этапа 415, также компьютер 105 может использовать такую информацию для генерирования маршрута в целевую точку назначения, например, к выезду с автомобильной стоянки. Кроме того, модуль 106 автономного управления в транспортном средстве 101 может использовать информацию о препятствиях, заграждениях и т.д., вместе с собранными данными 115 от устройств 110 сбора данных в транспортном средстве 101 для прокладывания маршрута к целевому пункту назначения. Например, датчики 110 транспортного средства 101 могут обнаруживать препятствия, о которых сервер 125 не может узнать с помощью данных 140 изображений, например, о небольших выбоинах, искусственных неровностях, имеющих такой же цвет и текстуру, что и автомобильная стоянка или дорожное покрытие и т.д.
После этапа 425 способ 400 завершается. Затем после этапа 425 автономное транспортное средство 101 может двигаться по маршруту и/или в соответствии с инструкциями, сгенерированными в соответствии с приведенным выше описанием.
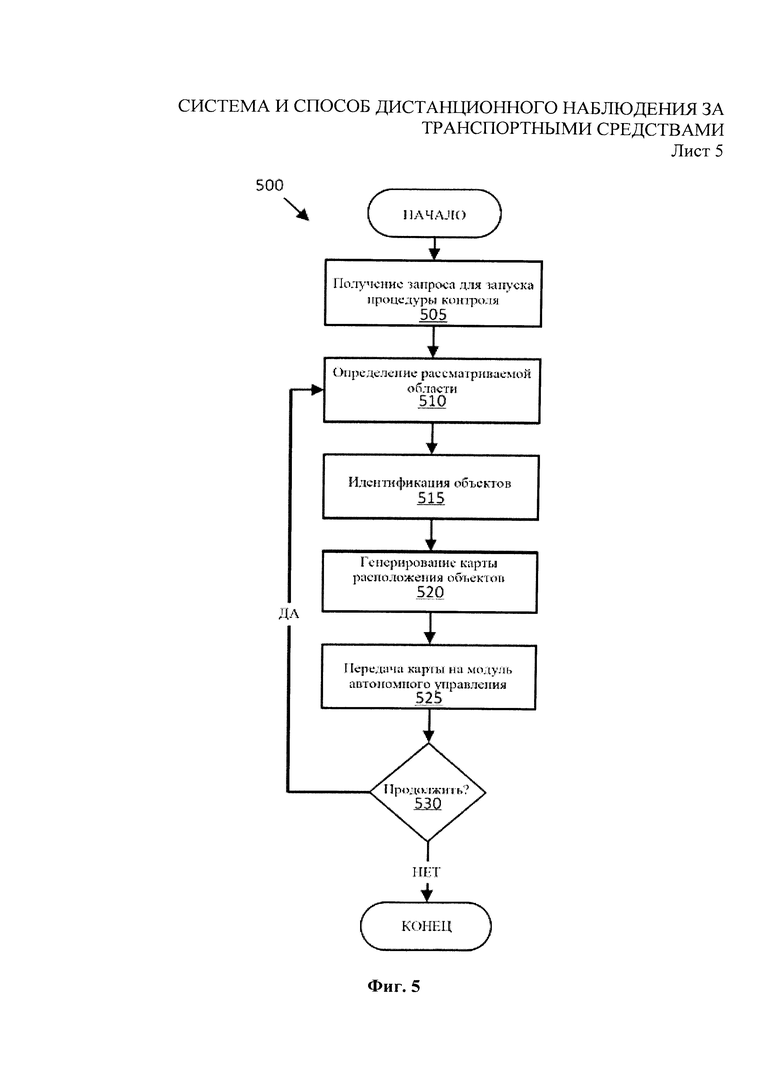
Фиг. 5 представляет собой блок-схему второго примера способа 500 использования данных от системы для дистанционного наблюдения за транспортными средствами в качестве исходных данных эксплуатации транспортного средства в автономном режиме.
Способ 500 начинается с этапа 505, на котором сервер 125 принимает запрос навигационной помощи и/или наблюдения с помощью компьютера 105 в транспортном средстве 101. Например, автономное транспортное средство 101 может автоматически устанавливать связь с сервером 125 и запрашивать контроль в соответствии со способом 500 при включении режима автономного управления. В качестве альтернативы модуль 106 автономного управления может быть выполнен с возможностью запроса контроля (наблюдения) с помощью сервера 125 при возникновении определенных условий, например, таких погодных условий, как ветер, осадки и т.д., при выявлении таких навигационных сложностей при управлении движением, как обнаружение неожиданных препятствий на пути автономного транспортного средства 101 и т.д. В любом случае на этапе 505 компьютер 105 в транспортном средстве 101 устанавливает связь с сервером 125 для включения контроля транспортного средства 101 и/или приема информации о контроле, генерируемой сервером 125.
Затем на этапе 510 сервер 125 определяет рассматриваемую область для автономного транспортного средства 101, которая указана в запросе, принятом на этапе 505. Подобное решение может быть принято аналогично тому, как это делалось на этапе 410, описанном выше. В качестве альтернативы или дополнения сервер 125 может быть использован для обеспечения контроля для конкретной географической области и предоставления информации, необходимой для контроля, в соответствии со способом 500 любому транспортному средству 101 или по крайней мере любому транспортному средству 101, имеющему подписку в системе 100, в ответ на запрос, выдаваемый в соответствии с приведенным выше описанием этапа 505. В данном случае на этапе 510 сервер 125 может идентифицировать контролируемую географическую область для транспортного средства 101.
Затем на этапе 515 сервер 125 анализирует данные 140 изображений о рассматриваемой области, определенной на этапе 510, для идентификации рассматриваемых объектов, например, таких препятствий, как камни, выбоины, остановившиеся транспортные средства, летящий мусор, летящий снег, строительные ограждения и т.д. В общем случае для идентификации неожиданных объектов на дороге могут быть использованы технологии распознавания изображения. Например, такие транспортные средства, как легковые и грузовые автомобили, могут быть ожидаемыми на дороге, как и строительное оборудование, строительные ограждения, разделители полос движения и т.д. Однако другие объекты могут быть неожиданными и/или представлять угрозу для безопасности и/или движения по маршруту. Для идентификации и классификации других таких объектов могут быть использованы технологии анализа изображения, например, определение их расчетных размеров, веса и возможного типа (включая камни, строительные ограждения, летящий мусор и т.д.
Затем на этапе 520 сервер 125 генерирует для рассматриваемой области карту, на которой указаны соответствующие местоположения важных объектов, идентифицированных на этапе 515. Другими словами, сервер 125 может определять географические координаты или другую информацию для соответствующих важных объектов таким образом, чтобы можно было определить местоположение соответствующих важных объектов по картографическим данным для рассматриваемой области. Более того, сервер 125 может проводить оценку риска или указывать рекомендуемые действия для важных объектов. Как было сказано выше, для обнаружения или классификации определенных важных объектов могут быть использованы технологии распознавания изображения. Вместе с такой идентификацией или классификацией сервер 125 также может оценивать степень риска, связанного с важным объектом. Например, для бумажного мусора, летящего по дороге, может быть установлен низкий уровень риска. Для летящего снега может быть установлен средний уровень риска. Для камня на дороге или остановившегося транспортного средства могут быть установлен высокий уровень риска. Более того, при обнаружении камня или остановившегося транспортного средства автономному транспортному средству 101 может понадобиться выполнить некоторые действия, например, остановку и/или объезд препятствия. Другие объекты, например, бумажный мусор, могут не требовать от автономного транспортного средства 101 выполнения каких-либо действий.
Для каждого объекта сервер 125 также может рассчитывать коэффициент достоверности. Например, анализ изображения 140 может позволить идентифицировать объект с изменяющейся степенью достоверности, которая может быть выражена, например, как 50%-ная вероятность, 70%-ная вероятность, 90%-ная вероятность того, что объект был правильно идентифицирован.
Кроме того, на дисплее компьютер 105 может отображать визуальную карту. Например, на данные 140 изображений и/или дорожную карту и т.д. для рассматриваемой области могут быть наложены значки, шаблонные изображения и т.д. Кроме того, в дополнение к отображению типа объекта или препятствия, визуальная карта также может включать в себя значок или текст, указывающий степень риска, связанного с объектом, и/или рекомендованные действия, например, низкий, средний или высокий риск и/или объезд объекта, продолжение нормального движения и т.д.
На этапе 525, выполняемом после этапа 520, сервер 125 выдает на компьютер 105 транспортного средства 101 такую информацию, как карта расположения объектов, сгенерированная в соответствии с описанием этапа 520. В качестве альтернативы или дополнения сервер 125 может выдавать определенные инструкции на основании карты расположения объектов, например, инструкции для модуля 106 автономного управления на выполнение остановки, поворота, замедления, ускорения и т.д. транспортного средства 101 для безопасного объезда одного или нескольких обнаруженных объектов. Обычно такие инструкции выдаются в соответствии с программой сервера 125, однако они также могут быть выданы в соответствии с данными, введенными оператором, проанализировавшим изображение 140, и/или в соответствии с выполняемыми сервером 125 идентификацией объекта, оценкой рисков и/или оценкой достоверности.
Кроме того, модуль 106 автономного управления может включать в себя инструкции для определения того, могут ли устройства 110 сбора данных транспортного средства 101 самостоятельно идентифицировать объект, добавленный на карту расположения объектов. Если модуль 106 автономного управления не может самостоятельно идентифицировать объект, добавленный на карту расположения объектов, модуль 106 автономного управления может включать в себя инструкции для следующих инструкций от сервера 125, касающиеся обнаруженного объекта, для выполнения действий на основании уровня риска, который установлен для данного объекта, например, для выполнения замедления или остановки при обнаружении объектов, связанных с высоким риском, а также продолжение нормального движения при обнаружении объектов, связанных с низким риском и т.д.
В качестве альтернативы или дополнения модуль 106 может учитывать упомянутый выше коэффициент достоверности, выдаваемый сервером 125 и присваиваемый каждому объекту. Например, если сервер 125 обнаруживает, что достоверность правильной идентификации объекта превышает 90%, то модуль 106 может включать в себя инструкции для генерирования инструкций автономного управления с учетом идентифицированного объекта. С другой стороны, при низкой достоверности идентификации объекта, например, ниже 50%, модуль 106 будет игнорировать идентификацию объекта. Более того, можно объединить оценку рисков с оценкой достоверности. Например, объект, связанный с высоким риском, может инициировать действие, выполняемое модулем 106, даже при относительно низком значении оценки достоверности, и наоборот.
Кроме того, как было сказано выше, прогнозирование появления препятствий на основании данных 140 изображений может быть объединено и/или дополнено прогнозированием препятствий на основании собранных данных 115. Например, когда компьютер 105 не может установить уровень достоверности идентификации типа объекта на основании данных 140 изображений или собранных данных 115, объединение или сравнение прогнозируемых результатов для типа, размеров и/или местоположения объекта и т.д. от этих двух источников может позволить достичь уровня достоверности, достаточного для получения необходимой информации, на основании которой могут быть выполнены действия по управлению и/или автономной работе транспортного средства 101.
Кроме того, если модуль 106 автономного управления может самостоятельно обнаружить объект, то данный модуль 106 автономного управления может включать в себя инструкции для игнорирования оценки риска, оценки достоверности и/или рекомендованных действий от сервера 125 для данного объекта. С другой стороны, модуль 106 автономного управления может объединить собственный результат идентификации объекта с результатом идентификацией объекта, выданного сервером 125. Например, сервер 125 может обнаруживать объект, находящийся впереди транспортного средства 101 с определенной степенью достоверности, например, равной 60%, и транспортное средство 101 может идентифицирован объект с определенной степенью достоверности, например, равной 50%, после чего модуль 106 может использовать идентификацию объекта, уровень достоверности которой после добавления идентификации объекта и оценки достоверности от сервера 125 превышает 50%. Более того, модуль 106 может использовать идентификацию объекта от сервера 125 для подтверждения правильности идентификации объектов по мере их появления. Например, сервер 125 может выдавать компьютеру 106 информацию об объекте, который расположен на дороге перед транспортным средством и, вероятно, представляет собой препятствие или угрозу, например, «резкий поворот через '/г мили», после этого модуль 106 может использовать данную информацию для подтверждения идентификации объекта, например, резкого поворота, по мере приближения транспортного средства 101 к данному объекту. В общем случае работа модуля 106 автономного управления может быть улучшена за счет сравнения идентификации объекта от сервера 125 с идентификацией объекта, выполненной компьютером 105 транспортного средства 101.
Затем на этапе 530 сервер 125 определяет, нужно ли продолжить выполнение способа 500. Например, сервер 125 может выполнять непрерывный или в значительной степени непрерывный контроль (наблюдение) одной или несколько рассматриваемых областей для одного или нескольких транспортных средств 101. Однако запрос, принятый, как было описано со ссылкой на этап 505, может относиться к карте с одним объектом и/или к однократному контролю. Кроме того, завершение способа 500 может быть определено на основании состояния транспортного средства 101, например, при выключении транспортного средства 101 и завершении работы модуля 106 автономного управления и т.д. В любом случае при необходимости продолжения выполнения способа 500 способ управления возвращается на этап 510. В противном случае способ 500 завершается после этапа 530.
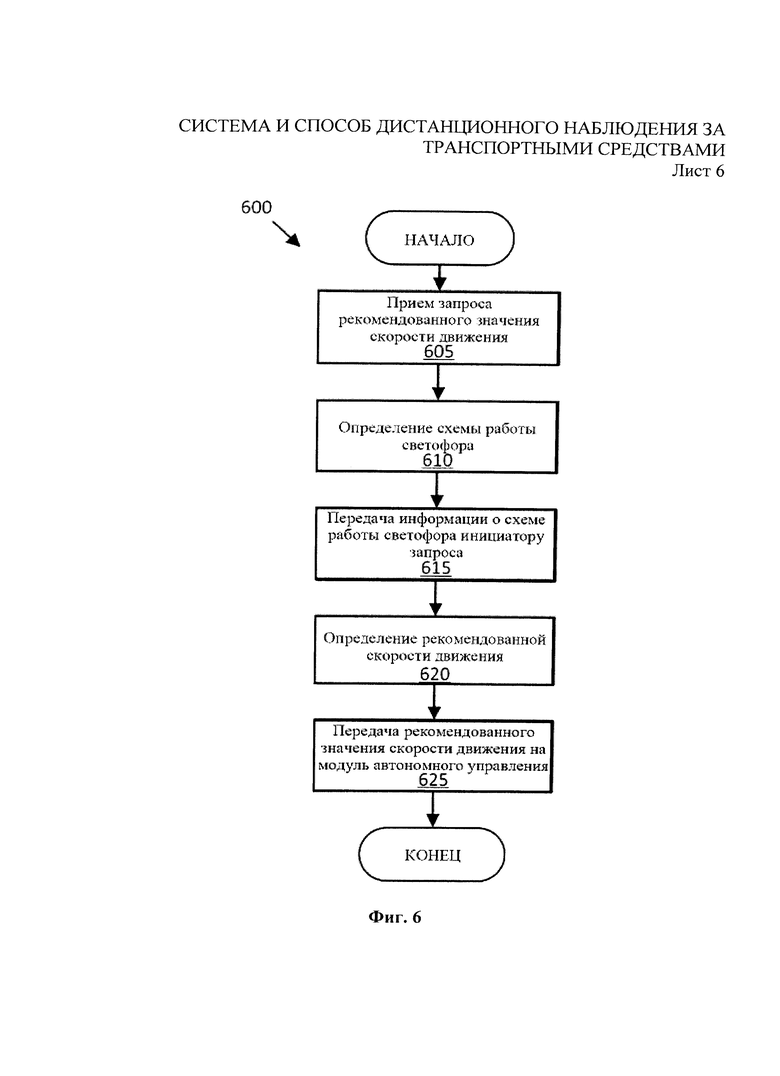
Фиг. 6 представляет собой блок-схему примера способа 600 выдачи транспортному средству 100 и/или оператору транспортного средства 101 рекомендаций, касающихся скорости движения.
Способ 600 начинается с этапа 605, на котором сервер 125 принимает от вычислительного устройства 105 или пользовательского устройства 150 запрос рекомендаций, касающихся скорости движения транспортного средства 101. Запрос выдается в способе 600 в дополнение к идентификации транспортного средства 101 и/или его местоположения, как правило, также выдается для определения запланированного маршрута транспортного средства 101. В качестве альтернативы или дополнения рассматриваемая географическая область может быть указана в запросе, либо рассматриваемая географическая область может быть определена сервером 125 на основании местоположения транспортного средства 101. Как было сказано выше, местоположение транспортного средства 101 может быть указано в запросе и/или может быть определено на основании данных 140 изображений. Кроме того, для определения схемы работы светофора серверу 125 не нужен отдельный запрос; например, для получения информации о работе светофора сервер 125 может анализировать изображение 140, которая затем может быть выдана в ответ на запрос, принимаемый после генерирования информации о работе светофора.
В общем случае рекомендованная скорость движения может зависеть от схем работы светофора, например, от горящего света, во время движения транспортного средства 101 по маршруту. За счет изменения скорости движения транспортное средство 101 может рассчитать время движения таким образом, чтобы проезжать перекресток или другую область, регулируемую с помощью светофоров, в момент, когда для транспортного средства 101 горит зеленый свет, без необходимости остановки или торможения из-за включения желтого или красного сигнала светофора.
Затем на этапе 610 сервер 125 анализирует данные 140 изображений, относящиеся к текущему местоположению транспортного средства 101 и/или к запланированному маршруту транспортного средства 101, и/или к рассматриваемой географической области, например, к конкретной дороге, по которой движется транспортное средство 101, для определения времени, когда на светофорах, скорее всего, будет гореть свет, вынуждающий транспортное средство 101 притормозить или остановиться, например, в моменты, когда светофоры, расположенные на маршруте транспортного средства 101, в анализируемой географической области и т.д., скорее всего, будут гореть желтым или красным. Например, сервер 125 может анализировать схемы движения рядом со светофорами, расположенными на маршруте транспортного средства 101, для определения моментов, когда поток движется медленно, останавливается или движется с нормальной скоростью. Сервер 125 также может учитывать предыдущие данные о схемах движения рядом со светофором, например, иллюстрирующие то, какая модель переключения светофора обычно используется в разное время суток, дни недели, времена года и т.д. В качестве альтернативы или дополнения сервер 125 может учитывать сохраненные данные о светофоре, например, периоды включения зеленого/желтого/красного сигналов и т.д. Кроме того, в дополнение к данным 140 изображений сервер 125 может учитывать другие данные, в т.ч. сигналы от GPS-устройства, сотового телефона и т.д., передаваемые одним или несколькими транспортными средствами 101, проезжающими мимо светофора. За счет объединения данных 140 изображений с одним или несколькими типами данных, указанными выше, сервер 125 может выдавать информацию о состоянии светофора, имеющую высокий уровень достоверности.
Следует отметить, что в некоторых случаях сервер 125 может знать местоположение и курс транспортного средства 101, например, движение на север по Мэйн-стрит от перекрестка Мэйн-стрит с Элм-стрит, но не иметь данных о запланированном маршруте транспортного средства 101. В таких случаях сервер 125 может анализировать данные 140 изображений для нескольких светофоров, расположенных на спрогнозированном маршруте транспортного средства 101, например, на заранее заданном расстоянии при движении транспортного средства 101 по планируемому пути, например, за милю, за пять миль и т.д. Кроме того, если транспортное средство 101 изменяет курс, например, сворачивает влево с Мэйн-стрит на Честнат-стрит и начинает двигаться на восток по Честнат-стрит, сервер 125 может проанализировать данные 140 изображений для нового спрогнозированного маршрута, например, для нового набора светофоров, установленных на заранее заданном расстоянии от текущего местоположения транспортного средства 101, на основании текущего курса транспортного средства 101, например, для светофоров, установленных в пределах двух миль к востоку от транспортного средства 101 по Честнат-стрит.
Затем на этапе 615, выполняемом после этапа 610, сервер 125 передает информацию о времени переключения, например, о прогнозируемых периодах времени, когда светофоры на маршруте транспортного средства 101, скорее всего, будут гореть зеленым, желтым и/или красным, на вычислительное устройство 105 или пользовательское устройство 150 в ответ на запрос, описанный выше со ссылкой на этап 605.
Затем на этапе 620 вычислительное устройство 105 или пользовательское устройство 150 транспортного средства 101, выдающего запрос, определяет рекомендованную скорость движения транспортного средства 101. Значение рекомендованной скорости движения может быть определено в зависимости от дорожных условий, правил дорожного движения, например, от ограничений скорости и т.д., а также от информации о схеме работы светофоров, установленных на маршруте транспортного средства 101, например, от прогнозируемых сервером 125 периодов времени включения красного, желтого или зеленого сигналов. Например, зная период, когда светофор на конкретном перекрестке, скорее всего, будет гореть зеленым, и зная текущее местоположение транспортного средства 101, вычислительное устройство 105 или пользовательское устройство 150 может определить желательную скорость движения транспортного средства 101, с которой оно должно подъезжать к перекрестку. Соответственно, вычислительное устройство 105 или 150 может определить желательную скорость для части или всего запланированного маршрута транспортного средства 101.
Затем на этапе 625 рекомендованная скорость, определенная на этапе 620, может быть выдана на модуль 106 автономного управления. Затем в соответствии с данными рекомендациями модуль 106 может изменять скорость движения транспортного средства 101. После этапа 625 способ 600 завершается.
В некоторых случаях модуль 106 автономного управления может не быть установлен в транспортном средстве 101 или может не использоваться. В таких случаях способ 600 может не включать в себя этап 625, но в любом случае пользователь может получать информацию о рекомендованной скорости движения через интерфейс пользовательского устройства 150, HMI-интерфейс, подключенный к вычислительному устройству 105 и т.д. Например, на HMI интерфейсе может отображаться информация, касающаяся работы светофора, такая как желательная скорость (в милях или километрах в час), которая может быть представлена в виде стрелки вверх при необходимости увеличения скорости, в виде стрелки вниз при необходимости снижения скорости или в виде плоской линии при необходимости поддержания неизменной скорости движения и т.д.
Кроме того, как было сказано выше со ссылкой на этап 620, вычислительное устройство 105, 150 может выдавать рекомендованные значения скорости движения для разных участков маршрута транспортного средства 101. Например, на разных участках маршрута могут быть разные ограничения скорости, дорожные условия и т.д., также предпочтительным может быть изменение скорости в соответствии с информацией о переключении светофоров на разных участках маршрута транспортного средства 101.
Более того, в иллюстративном способе 600, описанном выше, рекомендованные значения скорости движения определяются с помощью устройства 105, 150 после получения информации о схеме работы светофора от сервера 125. Однако сервер 125 может выдавать рекомендованные значения скорости или другие рекомендации для некоторых или всех участков маршрута транспортного средства 101 и может передавать данные рекомендации на устройство 105 или 150.
В общем случае вычислительные устройства, аналогичные тем, что были рассмотрены в настоящем описании, могут содержать инструкции, выполняемые одним или несколькими вычислительными устройствами, аналогичными тем, что были рассмотрены в настоящем описании, для осуществления этапов или операций вышеуказанных способов.
Например, рассмотренные выше этапы способа могут быть реализованы в виде машиночитаемых инструкций.
Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и/или технологий программирования, включая, но не ограничиваясь этим, языки Java, С, С++, Visual Basic, Java Script, Perl, HTML и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, включая один или несколько процессов, приведенных в настоящем описании. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей. Файл в вычислительном устройстве обычно представляет собой набор данных, хранящихся на машиночитаемом носителе, например, на носителе данных или в оперативном запоминающем устройстве, и т.д.
Машиночитаемый носитель может представлять собой любой носитель, предоставляющий данные (например, инструкции), которые могут быть обработаны компьютером. Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные запоминающие устройства, оперативные запоминающие устройства и т.д. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основного запоминающего устройства. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
На чертежах одинаковые элементы обозначены одинаковыми ссылочными позициями. Также некоторые или все элементы могут быть изменены. Что касается описанных в данном документе носителей, способов, систем, способов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие способы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов воплощения изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты осуществления и способы осуществления, отличные от указанных примеров, станут явными при ознакомлении с вышеприведенным описанием. Объем не должен быть определен на основании приведенного выше описания, но, напротив, должен быть определен на основании прилагаемой формулы изобретения наряду с полным объемом эквивалентов, для которых данная формула является основанием. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты осуществления изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано и что оно ограничивается только формулой изобретения.
Все термины, применяемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ МУЛЬТИМОДАЛЬНОГО МАРШРУТА ПОЕЗДКИ | 2014 |
|
RU2572279C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УЛУЧШЕННОЙ СИСТЕМОЙ СВЯЗИ | 2015 |
|
RU2682016C2 |
| Система совместно используемых транспортных средств | 2015 |
|
RU2696640C2 |
| УЛУЧШЕННОЕ ОПОВЕЩЕНИЕ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2709210C2 |
| УМЕНЬШЕННЫЕ СЕТЕВОЙ ПОТОК И ВЫЧИСЛИТЕЛЬНАЯ НАГРУЗКА С ИСПОЛЬЗОВАНИЕМ СРЕДСТВА ДИНАМИЧЕСКОГО ПРОСТРАНСТВЕННОГО И ВРЕМЕННОГО ПЛАНИРОВАНИЯ | 2015 |
|
RU2679248C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ ОЧИСТКИ ОКОН ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2651508C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ РЕЖИМА РАБОТЫ СВЕТОФОРОВ НА ОСНОВЕ ИНФОРМАЦИИ, ПОЛУЧАЕМОЙ С НАВИГАЦИОННЫХ УСТРОЙСТВ | 2014 |
|
RU2580428C1 |
| МОБИЛЬНОЕ ОБНАРУЖЕНИЕ ОРУЖЕЙНОГО ВЫСТРЕЛА | 2014 |
|
RU2679338C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВКИ МЕСТОПОЛОЖЕНИЙ ПОСАДКИ И ВЫСАДКИ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ХРАНЕНИЯ ДАННЫХ | 2017 |
|
RU2730785C2 |
Изобретение относится к дистанционному мониторингу транспортных средств. Техническим результатом является усовершенствование процесса определения местоположения и отслеживания транспортного средства. Заявлена система для дистанционного мониторинга транспортных средств, включающая компьютерный сервер с процессором и запоминающим устройством, на котором хранятся инструкции, исполняемые процессором, причем сервер выполнен с возможностью принимать аэроснимок, принимать данные, относящиеся к транспортному средству, принимать запрос изображения транспортного средства, идентифицировать транспортное средство на изображении и на основании, по крайней мере, фрагмента аэроснимка, на котором присутствует изображение транспортного средства, предоставлять информацию, содержащую этот фрагмент аэроснимка и/или местоположение транспортного средства, и/или маршрут транспортного средства, и/или событие, в котором участвует транспортное средство, и/или состояние транспортного средства. 3 н. и 16 з.п. ф-лы, 6 ил.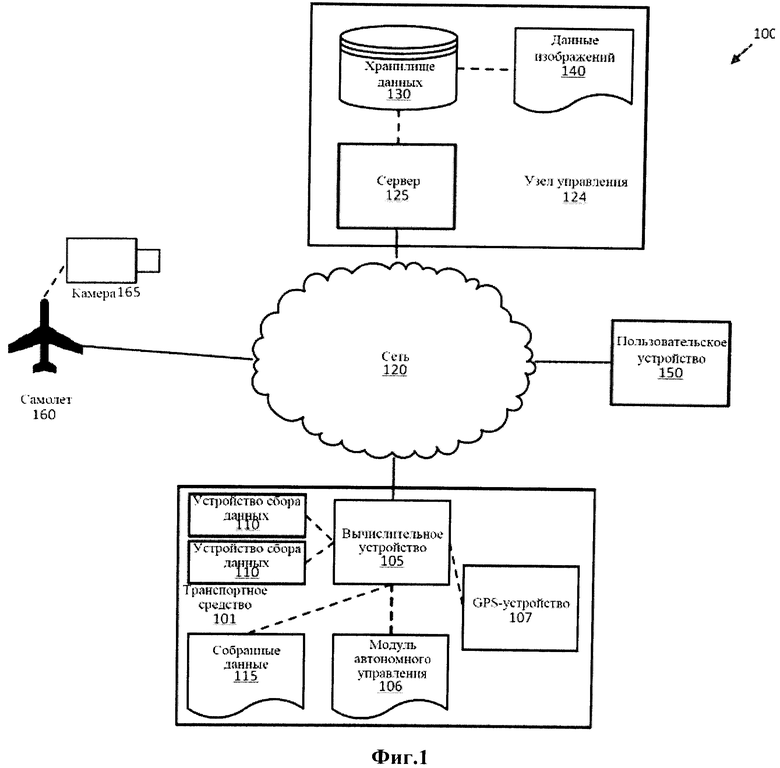
1. Система, содержащая компьютерный сервер, причем компьютерный сервер включает в себя процессор и запоминающее устройство, на котором хранятся инструкции, исполняемые процессором, таким образом, что сервер выполнен с возможностью:
принимать аэроснимок, захваченный летательным аппаратом;
принимать запрос на изображение наземного транспортного средства;
извлекать данные о наземном транспортном средстве в соответствии с идентификатором для наземного транспортного средства, включенного в запрос, причем данные включают в себя знак для идентификации наземного транспортного средства на изображении; идентифицировать наземное транспортное средство на изображении в соответствии со знаком; и
обеспечивать информацию, относящуюся к работе наземного транспортного средства на основании, по меньшей мере, фрагмента аэроснимка, который включает в себя наземное транспортное средство, информацию, включающую в себя по меньшей мере одно из события, связанного с наземным транспортным средством, и состояния наземного транспортного средства.
2. Система по п. 1, дополнительно содержащая воздушное судно, несущее камеру, причем камера выполнена с возможностью получения аэроснимка, и причем воздушное судно выполнено с возможностью передачи аэроснимка на сервер.
3. Система по п. 1, в которой сервер дополнительно выполнен с возможностью:
применять систему географических координат к аэроснимку, и
обнаруживать транспортное средство на изображении в соответствии с географическими координатами, обеспеченными в данных, относящихся к транспортному средству.
4. Система по п. 1, в которой транспортное средство маркировано идентификационным знаком, и причем сервер дополнительно выполнен с возможностью использовать идентификационный знак в качестве знака.
5. Система по п. 1, в которой аэроснимок представляет собой движущееся изображение, в результате чего фрагмент аэроснимка, который включает в себя транспортное средство, представляет собой движущееся изображение.
6. Система по п. 1, в которой одно из компьютера в транспортном средстве и мобильного пользовательского устройства предоставляет запрос серверу.
7. Система по п. 1, в которой устройство, принимающее часть аэроснимка, которая включает в себя транспортное средство, накладывает часть аэроснимка на карту области, которая включает в себя местоположение транспортного средства.
8. Способ, содержащий этапы, на которых:
принимают аэроснимок, захваченный летательным аппаратом;
принимают запрос на изображение наземного транспортного средства;
извлекают данные о наземном транспортном средстве в соответствии с идентификатором для наземного транспортного средства, включенного в запрос, причем данные включают в себя знак для идентификации наземного транспортного средства на изображении; идентифицируют наземное транспортное средство на изображении в соответствии со знаком; и
обеспечивают информацию, относящуюся к работе наземного транспортного средства на основании, по меньшей мере, фрагмента аэроснимка, который включает в себя наземное транспортное средство, информацию, включающую в себя по меньшей мере одно из события, связанного с наземным транспортным средством, и состояния наземного транспортного средства.
9. Способ по п. 8, дополнительно содержащий этапы, на которых: используют камеру в воздушном судне для получения аэроснимка; и передают аэроснимок на сервер от воздушного судна.
10. Способ по п. 8, дополнительно содержащий этапы, на которых: применяют систему географических координат к аэроснимку, и обнаруживают транспортное средство на изображении в соответствии с географическими координатами, обеспеченными в данных, относящихся к транспортному средству.
11. Способ по п. 8, в котором транспортное средство маркировано идентификационным знаком, и причем способ дополнительно содержит этап, на котором используют идентификационный знак в качестве знака.
12. Способ по п. 8, в котором аэроснимок представляет собой движущееся изображение, в результате чего фрагмент аэроснимка, который включает в себя транспортное средство, представляет собой движущееся изображение.
13. Способ по п. 8, в котором одно из компьютера в транспортном средстве и мобильного пользовательского устройства предоставляет запрос.
14. Способ по п. 8, в котором устройство, принимающее часть аэроснимка, которая включает в себя транспортное средство, накладывает часть аэроснимка на карту области, которая включает в себя местоположение транспортного средства.
15. Система, содержащая:
компьютерное устройство, выполненное с возможностью установки в наземное транспортное средство, причем компьютерное устройство включает в себя процессор и запоминающее устройство, на котором хранятся инструкции, исполняемые процессором, таким образом, что устройство выполнено с возможностью передачи географических координат местоположения наземного транспортного средства и идентификатора для наземного транспортного средства;
воздушное судно, несущее камеру, причем камера выполнена с возможностью получения аэроснимка географической области, который включает в себя географические координаты местоположения наземного транспортного средства, и причем воздушное средство выполнено с возможностью передачи аэроснимка на сервер; и
компьютерный сервер, причем компьютерный сервер включает в себя процессор и запоминающее устройство, причем запоминающее устройство хранит инструкции, выполняемые процессором таким образом, что сервер выполнен с возможностью:
принимать аэроснимок;
принимать географические координаты транспортного средства и идентификатор;
принимать запрос на изображение наземного транспортного средства;
обеспечивать информацию, относящуюся к работе наземного транспортного средства, на основании по меньшей мере части аэроснимка, который включает в себя наземное транспортное средство, причем информация включает в себя по меньшей мере одно из события, связанного с наземным транспортным средством, и состояния наземного транспортного средства.
16. Система по п. 15, которая дополнительно включает в себя удаленное устройство пользователя, выполненное с возможностью принимать фрагмент аэроснимка, который включает в себя транспортное средство.
17. Система по п. 15, в которой сервер дополнительно выполнен с возможностью:
применять систему географических координат для аэроснимка и
установить местоположение транспортного средства на изображении в соответствии с географическими координатами, обеспеченными в данных, относящихся к транспортному средству.
18. Система по п. 15, в которой аэроснимок представляет собой движущееся изображение, в результате чего фрагмент аэроснимка, который включает в себя транспортное средство, представляет собой движущееся изображение.
19. Система по п. 15, в которой устройство, принимающее часть аэроснимка, которая включает в себя транспортное средство, накладывает фрагмент аэроснимка на карту области, которая включает в себя местоположение транспортного средства.
| US 2004199785 A1, 07.10.2004 | |||
| EP 1964718 A3, 04.07.2012 | |||
| US 2005122235 A1, 09.06.2005 | |||
| US 2001041953 A1, 15.11.2001 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |

