Изобретение относится к системам, использующим беспилотные летательные аппараты (БЛА) для обзора земной поверхности и передачи сигналов, указывающих местоположение наземных объектов. Предлагаемая система может быть использована для наблюдения за наземной обстановкой, в том числе в труднодоступных районах (болотистой местности, районах чрезвычайных ситуаций, на поле боя и т.п.).
Известна авиационная система, содержащая малогабаритные БЛА с автономным электроприводом, передвижной контейнер и систему дистанционного управления, в которой БЛА выполнены в виде вертикально взлетающих платформ с жесткой конструкцией и снабжены системой автоматической посадки, а передвижной контейнер базируется на автомобильном шасси (патент RU №2015067, В 64 С 29/02).
Известен авиационный разведывательный комплекс, содержащий БЛА с радиоуправляемой бортовой системой обеспечения полета, бортовой приемопередающей аппаратурой и аппаратурой наблюдения за земной поверхностью, включающей в себя видеокамеру и передатчик радиоканала передачи изображений, а также мобильный наземный комплекс обработки информации и управления, содержащий наземную приемопередающую аппаратуру, приемник видеоизображений и радионавигационную систему. БЛА указанного авиационного разведывательного комплекса выполнен в виде плоской платформы с винтокольцевыми движителями, расположенными симметрично отсеку полезной нагрузки (патент RU №2067952, В 64 С 39/02).
Недостатками вышеупомянутых технических решений являются значительные габариты и вес, что не позволяет сделать их переносными и обеспечить, в случае необходимости, скрытность применения. Элементы их управления размещены на громоздких шасси, в связи с чем невысока проходимость комплексов на местности. Необходимость постоянного контроля и корректировки полета БЛА требует от оператора специальных навыков вождения. Недостатком конструкции БЛА является незащищенность винта от механических воздействий, которые зачастую неизбежны при приземлении аппарата.
Значительно меньшими габаритами и весом и большим удобством применения обладает портативный комплекс с летательным аппаратом по патенту RU №2067952, В 64 С 39/02, содержащий БЛА с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображений, а также мобильный комплекс управления и обработки информации с наземной приемопередающий аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом, в котором радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми с помощью приемника сигналов глобальной спутниковой радионавигационной системы инерциальными блоками на микромеханических вибрационных гироскопах, а сам БЛА размещен вместе с мобильным комплексом управления и обработки информации в общем, портативном контейнере, радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены инерциальными блоками с микромеханическими вибрационными гироскопами, корректируемыми с помощью приемника сигналов глобальной спутниковой радионавигационной системы, радиоуправляемая бортовая система обеспечения полета летательного аппарата своим выходом связана с бортовой приемопередающей аппаратурой и через, по меньшей мере, одну рулевую машинку - с электродвигателем, а мобильный комплекс управления и обработки информации снабжен портативным персональным компьютером, одометром, связанными между собой радиоприемником глобальной спутниковой радионавигационной системы и инерциальным измерительным блоком, а также компасом, причем одометр, инерциальный измерительный блок и наземная приемопередающая аппаратура подключены ко входам портативного персонального компьютера.
Указанный портативный комплекс выбран в качестве прототипа настоящего изобретения.
Несмотря на значительно меньшие массу и габариты, позволяющие сделать его переносным, а, в случае необходимости, обеспечить скрытность применения, комплекс-прототип относится к классу достаточно сложных и дорогостоящих изделий, требующих для своей эксплуатации профессионально подготовленного персонала.
Предметом настоящего изобретения является система наблюдения за наземной обстановкой, содержащая установленный на БЛА бортовой комплекс наблюдения и слежения, включающий в себя приемник команд, камеру наблюдения, передатчик изображений и микропроцессор, входы которого подключены к выходам высотомера, бесплатформенного инерциального блока и приемника команд, а выходы - ко входам камер наблюдения и слежения, к управляющему входу передатчика изображений и ко входу блока рулевых машинок, подключенного выходом к исполнительным устройствам, выполненным с возможностью управления полетом БЛА и ориентацией его в пространстве, а также, мобильный наземный комплекс наблюдения и управления, содержащий приемник изображений, выполненный с возможностью приема по радиоэфиру видеосигнала от передатчика изображений, портативный персональный компьютер и передатчик команд, выполненный с возможностью передачи по радиоэфиру на приемник команд сигналов управления полетом БЛА и ориентацией его в пространстве, - при этом в состав бортового комплекса наблюдения и слежения дополнительно введены блок сжатия данных, входы которого подключены, соответственно, к видеовыходу камеры наблюдения и к первому видеовыходу камеры слежения, а выход - к видеовходу передатчика изображений, корреляционное устройство, первый блок памяти, вход которого подключен к микропроцессору, а выход - к первому входу корреляционного устройства, и канал слежения, содержащий последовательно соединенные аналого-цифровой преобразователь, бортовое форматирующее устройство и второй блок памяти, а также камеру слежения, второй видеовыход которой подключен ко входу аналого-цифрового преобразователя, выход второго блока памяти подключен ко второму входу корреляционного устройства, выполненного с возможностью формирования сигнала корреляционной функции двух изображений, поступающих, из первого и второго блоков памяти, соответственно, и подачи этого сигнала на один из входов микропроцессора, выполненного с возможностью преобразования указанного сигнала корреляционной функции в команды управления блоком рулевых машинок, а в мобильный наземный комплекс наблюдения и управления введен формирователь кадра, вход которого подключен к выходу приемника изображений, а выход - к видеовходу портативного персонального компьютера, выход которого соединен со входом передатчика команд.
Задачей настоящего изобретения является создание системы наблюдения за наземной обстановкой с использованием БЛА, которая была бы доступна широкому кругу пользователей, в том числе и не обладающих профессиональными навыками дистанционного управления летательными аппаратами.
Техническим результатом являются простота, удобство применения и малые габариты бортовой аппаратуры и наземной части системы, обеспечивающие возможность ее реализации как в возимом, так и в носимом вариантах в различных тактических ситуациях.
Суть изобретения поясняется на фиг.1-4.
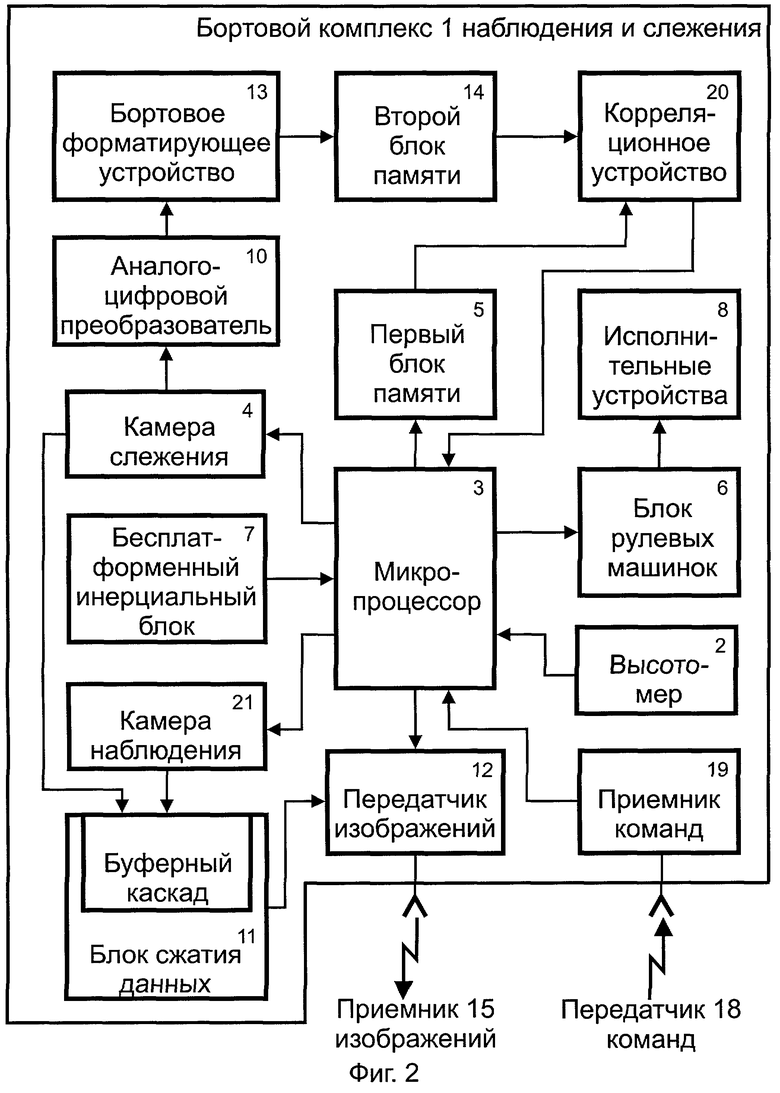
Фиг.1 иллюстрирует принцип действия предлагаемой системы.
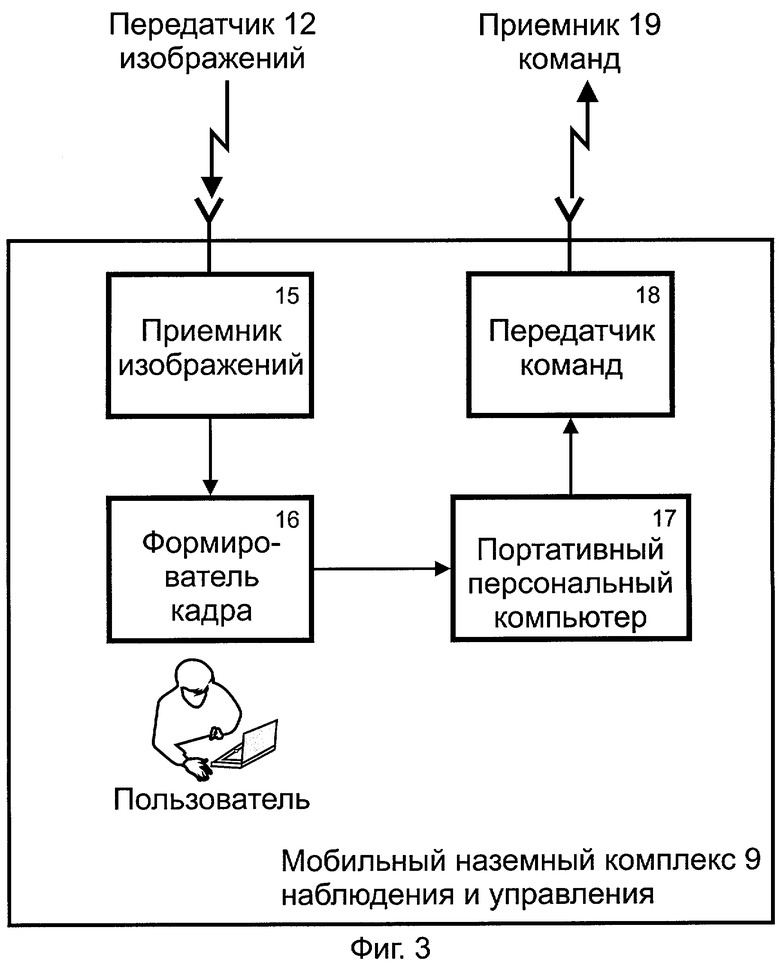
На фиг.2 представлена структурная схема бортового комплекса наблюдения и слежения.
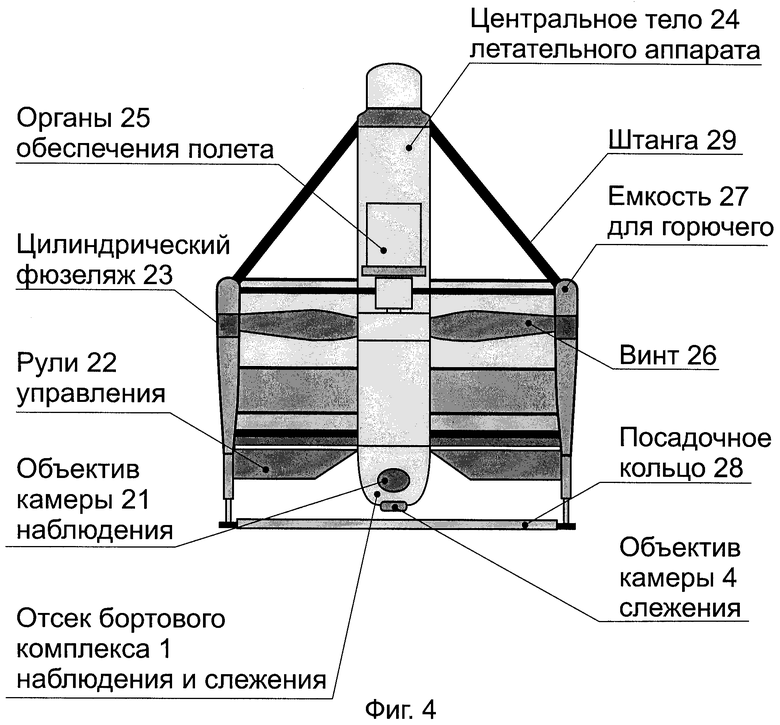
На фиг.3 показана структурная схема мобильного наземного комплекса наблюдения и управления.
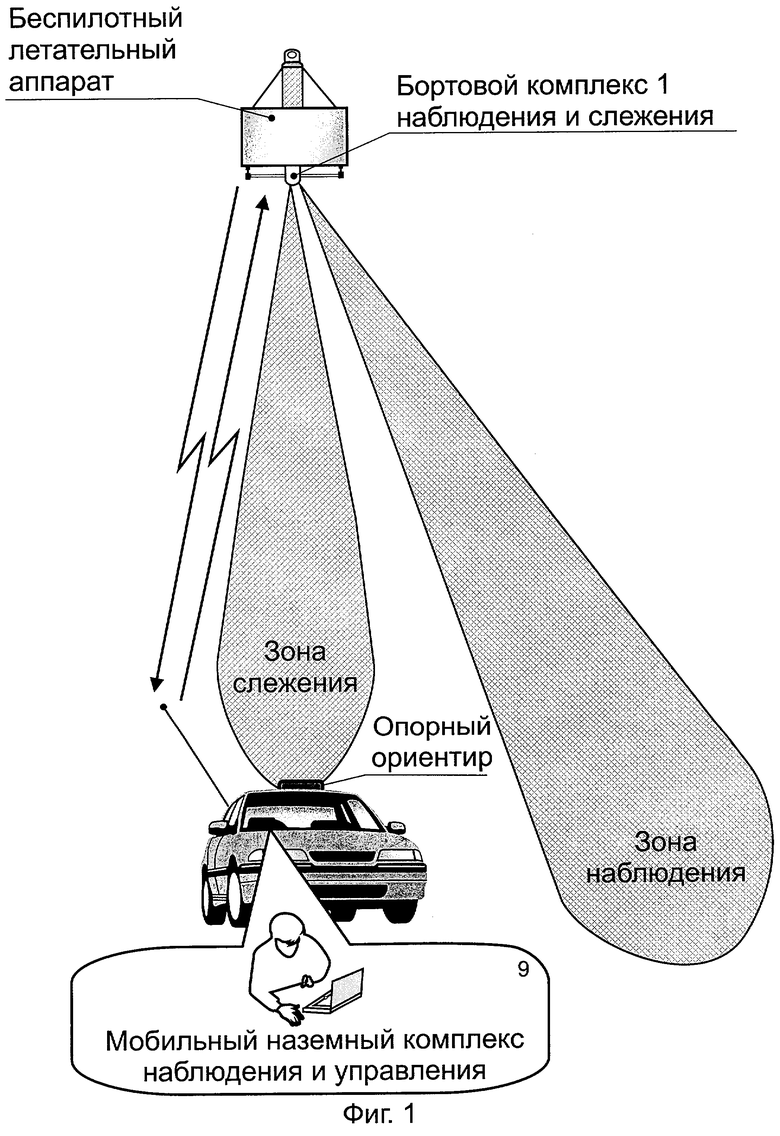
На фиг.4 представлен вариант технической реализации БЛА, который может быть использован в качестве носителя бортового комплекса наблюдения и слежения.
На представленных фигурах использованы следующие обозначения: 1 - бортовой комплекс наблюдения и слежения; 2 - высотомер; 3 - микропроцессор; 4 - камера слежения; 5 - первый блок памяти; 6 - блок рулевых машинок; 7 - бесплатформенный инерциальный блок; 8 - исполнительные устройства; 9 - мобильный наземный комплекс наблюдения и управления; 10 - аналого-цифровой преобразователь; 11 - блок сжатия данных; 12 - передатчик изображений; 13 - бортовое форматирующее устройство; 14 - второй блок памяти; 15 - приемник изображений; 16 - формирователь кадра; 17 - портативный персональный компьютер; 18 - передатчик команд; 19 - приемник команд; 20 - корреляционное устройство; 21 - камера наблюдения; 22 - рули управления; 23 - цилиндрический фюзеляж; 24 - центральное тело летательного аппарата; 25 - органы обеспечения полета; 26 - винт; 27 - емкость для горючего; 28 - посадочное кольцо; 29 - штанга.
Рассматриваемая система наблюдения за наземной обстановкой содержит (фиг.1) установленный на малогабаритном БЛА бортовой комплекс 1 наблюдения и слежения (фиг.2), включающий в себя приемник 19 команд, последовательно соединенные камеру 21 наблюдения, блок 11 сжатия данных и передатчик 12 изображений, выполненный с возможностью излучения в эфир высокочастотных сигналов, несущих видеосигналы панорамных изображений местности, получаемых камерой 21 наблюдения и подвергаемых сжатию (компрессии) в блоке 11 сжатия данных. В состав бортового комплекса 1 наблюдения и слежения входят также микропроцессор 3, высотомер 2, бесплатформенный инерциальный блок 7, блок 6 рулевых машинок, подключенный выходом к исполнительным устройствам 8, выполненным с возможностью управления полетом БЛА и ориентацией его в пространстве, первый блок 5 памяти, выход которого подключен к первому входу корреляционного устройства 20, и канал слежения, содержащий камеру 4 слежения, аналого-цифровой преобразователь 10, бортовое форматирующее устройство 13 и второй блок 14 памяти, выход которого подключен ко второму входу корреляционного устройства 20. При этом со входами микропроцессора 3 соединены выходы, соответственно, высотомера 2, бесплатформенного инерциального блока 7, приемника 19 команд и корреляционного устройства 20, а выходы микропроцессора 3 соединены с управляющими входами, соответственно, блока 6 рулевых машинок, камеры 4 слежения, передатчика 12 изображений и камеры 21 наблюдения, видеовыход которой подключен ко входу блока 11 сжатия данных.
В состав рассматриваемой системы наблюдения за наземной обстановкой (фиг.1) входит также мобильный наземный комплекс 9 наблюдения и управления (фиг.3), который может находиться непосредственно у пользователя системы (носимый вариант) либо быть установлен на транспортном средстве (ТС), в котором находится указанный пользователь (возимый вариант). В обоих вариантах мобильный наземный комплекс 9 наблюдения и управления содержит последовательно соединенные приемник 15 изображений, выполненный с возможностью приема по радиоэфиру высокочастотных сигналов от передатчика 12 изображений, формирователь 16 кадра, портативный персональный компьютер 17 и передатчик 18 команд, выполненный с возможностью передачи по радиоэфиру на приемник 19 команд сигналов управления полетом БЛА и ориентацией его в пространстве.
Представленный в данной заявке вариант построения системы наблюдения за наземной обстановкой базируется на использовании БЛА вентиляторного типа с вертикальным взлетом и посадкой, аналогичного БЛА, разработанного фирмой Micro Craft Inc. (США). Указанный БЛА прошел в 2000 году летные испытания по программе iSTAR (см. Материалы ежегодной 57-й конференции Американского вертолетного общества, Вашингтон, 9-11 мая 2001).
Фиг.4 изображает указанный БЛА после посадки или во время подъема и зависания. При горизонтальном перемещении ось симметрии БЛА отклонена от вертикального направления на некоторый угол. Указанный летательный аппарат содержит следующие основные конструктивные элементы: рули 22 управления, цилиндрический фюзеляж 23, внутри которого находится центральное тело 24 летательного аппарата с органами 25 обеспечения полета и отсеком бортового комплекса 1 наблюдения и слежения, в состав аппаратуры которого входят вышеупомянутые камера 21 наблюдения и камера 4 слежения. Винт 26 защищен цилиндрическим фюзеляжем 23, в теле которого находится емкость 27 для горючего. В нижней части БЛА расположено посадочное кольцо 28 для обеспечения безопасной вертикальной посадки. Центральное тело 24 летательного аппарата крепится к цилиндрическому фюзеляжу 23 с помощью системы штанг 29, которая может служить несущей конструкцией для установки на борту БЛА антенн передатчика 12 изображений и приемника 19 команд (фиг.2). Тяга создается винтом 26, приводимым во вращательное движение с помощью движителя с приводом (на фиг.4 не показан).
Основой для технической реализации бортового комплекса 1 наблюдения и слежения, устанавливаемого на борту БЛА, показанного на фиг.4, являются последние успехи в микротехнологиях, в особенности в технологиях микроэлектромеханических систем. Эти системы объединяют планарные электронные компоненты с аналогичными по габаритам электромеханическими структурами различной степени сложности, что обеспечивает уникальные возможности миниатюризации бортового оборудования.
В частности, американскими фирмами Analog Devices, Inc. и Texas Instruments свободно реализуются на рынке микропроцессорный датчик движения ADXL202, микромеханический гироскоп ADXRS300, микроконтроллер с чрезвычайно низким потреблением MSP430F 149, кодек AD 1836 и ряд других микроприборов, предназначенных для бортового применения (см. информацию на сайте www.analog.com).
Микромеханический гироскоп ADXRS300, составляющий основу бесплатформенного инерциального блока 7, действует по принципу гироскопического резонатора. Он содержит две многослойные кремниевые чувствительные пластины, каждая из которых находится в вибрирующей рамке, вводимой в состояние резонанса с помощью электростатического поля. Скорость резонансного движения пластин достаточна для появления кориолисовой силы при попытке поворота пластин вокруг оси, перпендикулярной их поверхностям. На двух внешних границах каждой рамки перпендикулярно направлению вибрационных колебаний пластин расположены штифты. Штифты расположены друг относительно друга таким образом, что образуют конденсорную тензочувствительную структуру, реагирующую на кориолисово ускорение. Формируемый в такой конденсорной структуре сигнал пропускается через несколько усиливающих и демодулирующих каскадов электронной схемы. Конструкция датчика позволяет компенсировать воздействие внешних сил и вибрации.
Для измерения угловой скорости изменения ориентации вектора скорости ТС в плоскости движения достаточно одного микромеханического гироскопа ADXRS300. Для измерения всех трех составляющих угловой скорости необходимы, соответственно, три микромеханических гироскопа ADXRS300, установленных во взаимно перпендикулярных плоскостях.
Конструктивно микромеханический гироскоп ADXRS300 выполнен в виде микрочипа размерами (7×7×3) мм и по своим параметрам приспособлен для работы в бортовых условиях (при наличии высоких перегрузок и широкого диапазона рабочих температур).
Высокой степенью миниатюризации, надежности работы и устойчивости к внешним воздействиям обладают и современные портативные камеры наблюдения. Так, подробная информация о портативных видеокамерах, которые могут использоваться в составе бортового комплекса 1 наблюдения и слежения в качестве камеры 21 наблюдения и камеры 4 слежения, представлена, например, на сайте компании КОМКОМ Electronics www.comcom.ru. В сообщении, опубликованном в марте 2004 года на сайте www.cnews.ru, говорится о создании летающего робота, оснащенного видеокамерой, общим весом всего 10 граммов.
Для наблюдения в ночных условиях в качестве камер наблюдения 21 и слежения 4 может быть использована доступная на коммерческом рынке продукция компании FLIR Systems (США), например, ИК-камеры серии Therma CAM Eseries Infrared Cameras (www. flirthermographv. com).
Блок 11 сжатия данных может быть реализован на микропроцессоре ADSP-BF модели 532 или 533 компании Analog Devices, Inc. В рассматриваемой системе на указанных микропроцессорах могут быть реализованы различные методы (форматы) компрессии изображений (RLE, фрактальный, рекурсивный и др.). Так, в действующем на предприятии-заявителе макете системы ALV-1000, включающей в себя: передатчик 12 изображений ALV-1000T с приемником 19 команд и приемник 15 изображений ALV-1000R с передатчиком 18 команд, для передачи видеосигнала по радиоканалу используется известный формат JPEG (см., например, Д.Ватолин и др. "Методы сжатия данных", Москва, "Диалог - МИФИ", 2003, раздел 2, глава 2).
Указанный формат сжатия относится к алгоритмам компрессии изображений с потерями. Как правило, степень компрессии и, следовательно, степень необратимых потерь качества изображения можно задавать заранее, достигая при этом компромисса между требуемой пропускной способностью радиоканала, размером изображения и его качеством. JPEG - один из новых и достаточно эффективных алгоритмов компрессии. Практически он является международным стандартом для полноцветных изображений.
Канал слежения (в состав которого входят: камера 4 слежения, аналого-цифровой преобразователь 10, бортовое форматирующее устройство 13 и второй блок 14 памяти) и корреляционное устройство 20, к которому подключен первый блок 5 памяти, используемый для хранения и поиска эталонных изображений, описаны в патентно-технической литературе (см., например, описание патента US №4474343, F 41 G 7/20, 2.10.1984, В.К.Баклицкий и др. "Методы фильтрации сигналов в корреляционно-экстремальных системах навигации", Москва, "Радио и связь", 1986 и др.).
Портативный персональный компьютер 17 представляет собой обычный переносной компьютер типа Ноутбук с жидкокристаллическим монитором. Формирователь 16 кадра конструктивно, как правило, располагается внутри корпуса этого персонального компьютера и может быть выполнен в виде его отдельной функциональной ячейки.
Таким образом, все используемые в рассматриваемой системе наблюдения узлы известны и доступны на коммерческом рынке. Поэтому возможность практической реализации заявляемой системы наблюдения с использованием БЛА не вызывает сомнений.
Рассматриваемая система наблюдения за наземной обстановкой работает следующим образом.
Взлет БЛА осуществляется вертикально вверх при включении пользователем (являющийся одновременно и оператором системы) микропроцессора 3, входящего в состав бортового комплекса 1 наблюдения и слежения. Далее, команды, необходимые для управления взлетом БЛА, подает уже микропроцессор 3. Перед взлетом БЛА может быть помещен на специальный портативный контейнер или находиться непосредственно в руках пользователя. Вблизи от места старта должен располагаться хорошо различимый с высоты опорный ориентир. Очертания опорного ориентира должны позволять однозначно определять его положение и ориентацию при наблюдении сверху как в видео, так и в ИК-диапазонах. Роль опорного ориентира может играть символ, нанесенный на крышу ТС пользователя, или даже характерные очертания самого ТС.
Необходимым предварительным условием взлета БЛА является включение мобильного наземного комплекса 9 наблюдения и управления. При этом мобильный наземный комплекс 9 наблюдения и управления может быть установлен внутри ТС (возимый вариант), или находиться непосредственно у пользователя без непосредственной связи с ТС (носимый вариант).
Высота подъема БЛА измеряется с помощью высотомера 2, входящего в состав бортового комплекса 1 наблюдения и слежения. Его показания передаются в микропроцессор 3, который сравнивает их с заданным пороговым значением. После достижения заданной высоты подъема БЛА микропроцессор 3 посылает на управляющие входы блока 6 рулевых машинок и камеры 4 слежения, команды, соответственно, на перевод БЛА в режим зависания и на включение камеры 4 слежения.
После перехода в режим зависания БЛА сохраняет неизменной высоту своего подъема и ориентацию. Стабилизация в пространстве осуществляется автоматически по принципу автопилота, в котором имеются три канала стабилизации: курса, крена и тангажа. В качестве измерителей угловой скорости используются микромеханические гироскопы, расположенные в бесплатформенном инерциальном блоке 7. Управление БЛА для поддержания стабильного положения и ориентации в пространстве осуществляется микропроцессором 3 с помощью исполнительных устройств 8, на которые подаются соответствующие команды из блока 6 рулевых машинок, подключенного к микропроцессору 3.
В режиме зависания, непосредственно после старта БЛА, камера 4 слежения оказывается включенной, а камера 21 наблюдения остается отключенной.
Ось сектора обзора камеры 4 слежения в режиме зависания ориентирована вертикально вниз, поэтому, как правило, опорный ориентир попадает в поле зрения камеры 4 слежения, являющейся источником информации для канала слежения. Камера 4 слежения формирует изображение местности и передает получаемый видеосигнал:
- с первого выхода - в буферный каскад блока 11 сжатия данных;
- со второго выхода - на вход аналого-цифрового преобразователя 10.
Аналого-цифровой преобразователь 10 осуществляет бинарное квантование видеоизображения со второго выхода камеры 4 слежения, преобразуя кадр видеоизображения в двумерную мозаику единиц и нулей. Указанный двумерный массив данных поступает на вход бортового форматирующего устройства 13, которое преобразует его в одномерные последовательности единиц и нулей, необходимые для записи во второй блок 14 памяти. Объем памяти последнего соответствует объему информации, содержащейся в одном кадре видеоизображения, получаемого камерой 4 слежения. После накопления во втором блоке 14 памяти данных, соответствующих указанному кадру видеоизображения, бортовое форматирующее устройство 13 прерывает поток данных до тех пор, пока второй блок 14 памяти не будет полностью очищен, то есть пока текущий кадр видеоизображения в канале слежения не будет передан в корреляционное устройство 20 для сравнения с аналогичным кадром эталонного изображения.
Одновременно блок 11 сжатия данных осуществляет компрессию изображений видеосигнала с первого выхода камеры 4 слежения. Поскольку при этом камера 21 наблюдения отключена, ее выходной видеосигнал не может исказить выходной видеосигнал камеры 4 слежения.
Примером метода компрессии блока 11 сжатия данных является используемый в действующем на предприятии-заявителе макете системы ALV-1000 формат (алгоритм) JPEG.
В указанном формате используется разбиение изображения на области размером 8×8 пикселей с последующим разложением матрицы такой области для получения некоторой новой матрицы коэффициентов - в двойной ряд по косинусам, так называемое дискретное косинусоидальное преобразование (ДКП). После осуществления ДКП получается матрица амплитуд некоторых частотных составляющих, в которой многие коэффициенты либо равны нулю либо пренебрежимо малы и отбрасываются. Кроме того, благодаря несовершенству человеческого зрения, допускается достаточно грубая аппроксимация указанных коэффициентов (путем квантования) без заметной потери качества изображения.
С выхода блока 11 сжатия данных видеосигнал, подвергшийся ДКП, подается на видеовход передатчика 12 изображений для передачи по радиоканалу на мобильный наземный комплекс 9 наблюдения и управления. В используемой на предприятии-заявителе системе передачи изображений ALV-1000 для передачи видеосигнала используется Bluetooth-радиоканал, в котором передатчик 12 изображений типа ALV-1000T с приемником 19 команд базируется на передающем Bluetooth-узле, а приемник 15 изображений типа ALV-1000R с передатчиком 18 команд - на приемном Bluetooth-узле, удовлетворяющем техническим требованиям руководящего документа отрасли связи: РД45.176-2001 "Аппаратура связи, реализующая функции коммутации кадров в локальной сети на уровне звена данных", Москва, Минсвязи России, 2001.
В мобильном наземном комплексе 9 наблюдения и управления сигнал в формате JPEG принимается приемником 15 изображений и с его выхода подается в формирователь 16 кадра, где осуществляется обратное преобразование ДКП, которое возвращает сигнал к исходному виду, зафиксированному камерой 4 слежения. Сигнал, таким образом, становится пригодным для отображения на мониторе портативного персонального компьютера 17. Конструктивно указанный формирователь 16 кадра может находиться внутри корпуса портативного персонального компьютера 17, в виде отдельной функциональной ячейки.
Таким образом, на мониторе портативного персонального компьютера 17 формируется изображение, полученное камерой 4 слежения.
Пользователь, анализируя указанное изображение, проверяет, что в поле зрения камеры 4 слежения действительно содержится вышеупомянутый опорный ориентир. Если такое событие произошло, то пользователь подает с портативного персонального компьютера 17 на вход передатчика 18 команд команду "автозахвата" опорного ориентира. Указанная команда переносится на несущую радиоканала и поступает на вход установленного на борту БЛА приемника 19 команд, который выделяет указанную команду из принятого высокочастотного сигнала и передает ее в микропроцессор 3. Последний формирует и передает на вход первого блока 5 памяти команду поиска эталонного изображения, в наибольшей степени соответствующего опорному ориентиру. В зависимости от формы используемого опорного ориентира, высоты нахождения БЛА и возможных отклонений оси сектора слежения от вертикали, определяющих конкретный ракурс наблюдения, в первом блоке 5 памяти ищется определенное эталонное изображение опорного ориентира. Это эталонное изображение передается на первый вход корреляционного устройства 20 для последующей корреляционной обработки эталонного изображения и текущего изображения, поступающего из канала слежения на второй вход корреляционного устройства 20.
Указанная обработка (см. вышеупомянутую книгу В.К.Баклицкого и др. "Методы фильтрации сигналов в корреляционно-экстремальных системах навигации", Москва, "Радио и связь", 1986) основана на том, что пик корреляционного отклика на выходе корреляционного устройства 20 соответствует максимальной степени согласования (близости) двух изображений между собой, а уменьшение корреляционного отклика - смещению одного изображения относительно другого, вследствие отклонения БЛА от заданного положения по отношению к находящемуся на земле опорному ориентиру. Корреляционное устройство 20 работает, таким образом, аналогично дискриминатору в бортовых радиопеленгаторах наземных объектов (см., например, "Справочник по радиолокации" под редакцией М.Сколника, том 4, Москва, "Советское Радио", 1978, глава 1) - амплитуда его выходного сигнала прямо пропорциональна степени отклонения оси сектора обзора камеры 4 слежения от направления на опорный ориентир. Указанный сигнал рассогласования поступает в микропроцессор 3, на другой вход которого подается сигнал из бесплатформенного инерциального блока 7. Совместная обработка этих сигналов в микропроцессоре 3 позволяет разложить требуемое управляющее воздействие на три составляющие: по крену, тангажу и рысканию и сформировать управляющие воздействия на соответствующие элементы блока 6 рулевых машинок, которые, в свою очередь, формируют требуемые управляющие воздействия на исполнительные устройства 8 БЛА. Воздействия, в частности, касаются рулей 22 управления, с помощью которых БЛА приходит в движение, производя соответствующие развороты, горизонтальные перемещения, поднимаясь или опускаясь. При этом изменяется вид изображения опорного ориентира, фиксируемый камерой 4 слежения, что соответствует изменению выходных сигналов корреляционного устройства 20. БЛА в конце концов занимает такое положение, при котором изображение опорного ориентира принимает установленную в первом блоке 5 памяти эталонную форму, ориентацию и размер, занимает при этом в видеокадре строго фиксированное положение. Например, в доступном пользователю изображении на экране монитора опорный ориентир должен занять место в левом нижнем углу экрана и иметь установленный размер и ориентацию. После этого движение БЛА прекращается, и БЛА переходит в режим зависания. На этом заканчивается отработка поданной пользователем команды "автозахвата" опорного ориентира.
Если в режиме зависания непосредственно после старта БЛА пользователь не обнаруживает изображения опорного ориентира на экране монитора, то подача команды "автозахвата" опорного ориентира невозможна. Руководствуясь наблюдениями на местности за положением БЛА и опорного ориентира, а также анализируя изображение на экране монитора портативного персонального компьютера 17, пользователь подает на БЛА команды ограниченного ручного дистанционного управления и по экрану монитора следит за тем, что попадает в поле зрения камеры 4 слежения.
Как правило, ограниченное ручное дистанционное управление БЛА осуществляется с помощью обычного джойстика или трекбола портативного персонального компьютера 17. С выхода портативного персонального компьютера 17 команды управления в виде соответствующих кодовых посылок передаются в передатчик 18 команд, излучаются на частотах радиоканала в эфир и поступают на вход установленного на борту БЛА приемника 19 команд. Приемник 19 команд выделяет в принятом высокочастотном сигнале кодовую посылку и передает ее в микропроцессор 3. Микропроцессор 3 формирует соответствующие принятой команде управляющие воздействия на рулевые машинки и передает их в блок 6 рулевых машинок, к выходу которого подключены исполнительные устройства 8, отрабатывающие указанные команды.
Подобный метод управления БЛА рассматриваемого типа (см. фиг.4) и результаты его летных испытаний рассмотрены, в частности, в материалах доклада L.Lipera et al. "The Micro Craft iSTAR Micro Air Vehicle: Control System Design and Testing", Washington, DC, May 9-11, 2001.
После того, как на экране монитора оказывается изображение опорного ориентира, пользователь должен прекратить ограниченное ручное дистанционное управление и подать команду "автозахвата" опорного ориентира. Ее отработка была рассмотрена выше. После выполнения команды "автозахвата" опорного ориентира БЛА оказывается в режиме зависания в точке пространства, строго определенной положением опорного ориентира. Благодаря этому обеспечивается стабильность положения в пространстве камеры 4 слежения, объектив которой направлен вертикально вниз, а также камеры 21 наблюдения, используемой для получения панорамного изображения.
При изменении положения на местности опорного ориентира (например, при передвижении ТС, на крышу которого нанесен опорный ориентир) пользователь, комбинируя подачу команд ограниченного ручного дистанционного управления и "автозахвата" опорного ориентира, вызывает в БЛА управляющие воздействия, приводящие к горизонтальному перемещению БЛА. Скорость горизонтального движения БЛА при этом оказывается равной скорости перемещения носителя опорного ориентира по земле (то есть, скорости ходьбы пользователя - в носимом варианте мобильного наземного комплекса 9 наблюдения и управления, либо скорости движения ТС - в возимом варианте).
Достигнув выбранной точки на земной поверхности, пользователь может зафиксировать на местности положение опорного ориентира, перевести БЛА в режим висения в вертикальном положении относительно поверхности земли и подать с помощью портативного персонального компьютера 17 команду на бортовой комплекс 1 наблюдения и слежения, необходимую для включения камеры 21 наблюдения. Таким образом, БЛА, несущий бортовой комплекс 1 наблюдения и слежения, оказывается как бы "привязанным" к опорному ориентиру и автоматически отрабатывает его перемещения по местности. При этом жестко связанная с корпусом БЛА камера 21 наблюдения, находящаяся внутри цилиндрического фюзеляжа 23 - в нижней части центрального тела 24 летательного аппарата, обеспечивает панорамный обзор земной поверхности, находясь в устойчивом положении относительно обозреваемого участка местности. Это положение поддерживается с помощью органов 25 обеспечения полета, расположенных в средней части центрального тела 24 летательного аппарата. При этом вертикальная тяга, уравновешиваемая силой тяжести БЛА, создается винтом 26. Указанный винт 26 защищен от внешних механических воздействий, например, вследствие неудачной (невертикальной) посадки на землю, цилиндрическим фюзеляжем 23, внутри которого находится полость, используемая в качестве емкости 27 для горючего. Для обеспечения жесткой связи цилиндрического фюзеляжа 23 с центральным телом 24 летательного аппарата используются штанги 29.
Для передачи панорамного изображения, получаемого камерой 21 наблюдения, микропроцессор 3 временно отключает подачу сигналов с первого видеовыхода камеры 4 слежения на блок 11 сжатия данных (со второго видеовыхода камеры 4 слежения сигналы по-прежнему поступают на аналого-цифровой преобразователь 10). Таким образом, на буферный каскад блока 11 сжатия данных поступает только панорамное изображение, получаемое камерой 21 наблюдения. В блоке 11 сжатия данных осуществляется компрессия этого изображения, аналогичная рассмотренной выше (при анализе компрессии видеосигналов камеры 4 слежения). Кадр сжатого панорамного изображения по сигналу микропроцессора 3 передается с борта БЛА с помощью передатчика 12 изображений в мобильный наземный комплекс 9 наблюдения и управления - на вход приемника 15 изображений. По окончании передачи установленного числа кадров панорамного изображения микропроцессор 3 отключает от блока 11 сжатия данных камеру 21 наблюдения и подключает камеру 4 слежения. Блок 11 сжатия данных осуществляет компрессию видеосигнала камеры 4 слежения. После этого по очередному сигналу микропроцессора 3 осуществляется передача видеосигнала камеры 4 слежения.
Затем микропроцессор 3 вновь отключает от блока 11 сжатия данных выходные сигналы камеры 4 слежения и подключает видеосигналы камеры 21 наблюдения и т.д.
Кадры изображения, получаемые камерой 4 слежения и камерой 21 наблюдения, снабжаются в блоке 11 сжатия данных специальными идентификационными отметками и передаются раздельно друг от друга по времени, что позволяет избежать их взаимного слияния на приемном конце.
Программой, установленной в портативном персональном компьютере 17, может быть предусмотрена селекция кадров, получаемых от камеры 4 слежения и от камеры 21 наблюдения, и передача этой видеоинформации на монитор портативного персонального компьютера 17 в разных окнах.
Пользователь, руководствуясь панорамным изображением на мониторе портативного персонального компьютера 17, может подавать на бортовой комплекс 1 наблюдения и слежения команды управления камерой 21 наблюдения (изменение угла наклона, смена объективов, переход на анализ ИК-излучения и т.п.). Эти команды, как и все рассмотренные выше, формируются пользователем с помощью портативного персонального компьютера 17, поступают из него на передатчик 18 команд, передаются по радиоэфиру на приемник 19 команд, и анализируются в микропроцессоре 3. После этого микропроцессор 3 формирует соответствующие специальные воздействия, управляющие камерой 21 наблюдения.
Необходимо отметить, что кроме видеосигналов передатчик 12 изображений может передавать и специальную информацию, поступающую на него непосредственно из микропроцессора 3: предупреждение пользователя о нехватке горючего, о потере изображения опорного ориентира (например, из-за тумана или дождя) и др. Специальная информация обнаруживается в выходных сигналах приемника 15 изображений формирователем 16 кадра и отражается на мониторе портативного персонального компьютера 17 поверх видеоизображений, сопровождаясь звуковыми предупредительными сигналами (если подача таких сигналов предусмотрена конструкцией формирователя 16 кадра).
По окончании сеанса наблюдения за участком поверхности земли пользователь подает на БЛА команду снижения и посадки. Отрабатывая эту команду, микропроцессор 3 воздействует через блок 6 рулевых машинок на исполнительные устройства 8, вызывая вертикальное снижение БЛА.
Посадка БЛА после выполнения поставленной задачи осуществляется на жестко закрепленное в нижней части цилиндрического фюзеляжа 23 посадочное кольцо 28.
При достаточном снижении БЛА пользователь может, не дожидаясь контакта посадочного кольца 28 с земной поверхностью, подхватить его на лету. Необходимость таких действий пользователя может вызываться наличием неровностей поверхности в месте посадки или неблагоприятными погодными условиями, например, сильным боковым ветром. Такие действия пользователя не представляют ни для него, ни для БЛА никакой опасности, поскольку вращающийся винт 26 БЛА надежно прикрыт цилиндрическим фюзеляжем 23.
По окончании полета БЛА пользователь вручную отключает микропроцессор 3. БЛА становится при этом готов к транспортировке наземным транспортом, к дозаправке емкости 27 для горючего, к проведению профилактических работ, к тестированию и т.п.
Таким образом, решается поставленная задача - может быть реализована система наблюдения с использованием БЛА, доступная широкому кругу пользователей, в том числе и не обладающих профессиональными навыками дистанционного управления летательными аппаратами.
Техническим результатом является достижение простоты, удобства применения системы и обеспечение малых габаритов бортовой аппаратуры и наземной части системы. При этом может быть осуществлена возможность применения предлагаемой системы как в возимом, так и в носимом вариантах исполнения мобильного наземного комплекса наблюдения и управления, в различных тактических ситуациях, связанных с обзором значительных участков земной поверхности и с поиском на них требуемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2008 |
|
RU2387584C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
Изобретение относится к системам, использующим беспилотные летательные аппараты (БЛА) для обзора земной поверхности и передачи сигналов, указывающих местоположение наземных объектов. На БЛА установлен бортовой комплекс наблюдения и слежения, включающий в себя приемник команд, камеры наблюдения и слежения, передатчик изображений, микропроцессор, высотомер, бесплатформенный инерциальный блок, аналого-цифровой преобразователь, бортовое форматирующее устройство, блок сжатия данных, два блока памяти, корреляционное устройство, блок рулевых машинок и исполнительные устройства. Корреляционное устройство выполнено с возможностью формирования сигнала корреляционной функции двух изображений, поступающих из блоков памяти, и подачи этого сигнала на один из входов микропроцессора, выполненного с возможностью преобразования указанного сигнала корреляционной функции в команды управления блоком рулевых машинок. В мобильном наземном комплексе наблюдения и управления имеются приемник изображений, выполненный с возможностью приема по радиоэфиру видеосигнала от передатчика изображений, портативный персональный компьютер, передатчик команд, выполненный с возможностью передачи по радиоэфиру на приемник команд сигналов управления полетом БЛА и ориентацией его в пространстве, а также формирователь кадра. Технический результат выражается в упрощении системы, снижении габаритов бортовой аппаратуры БЛА и наземной части, а также в повышении удобства применения. 4 ил.
Система наблюдения за наземной обстановкой, содержащая установленный на беспилотном летательном аппарате бортовой комплекс наблюдения и слежения, включающий в себя приемник команд, камеру наблюдения, передатчик изображений и микропроцессор, входы которого подключены к выходам высотомера, бесплатформенного инерциального блока и приемника команд, а выходы - ко входам камер наблюдения и слежения и ко входу блока рулевых машинок, подключенного выходом к исполнительным устройствам, выполненным с возможностью управления полетом беспилотного летательного аппарата и ориентацией его в пространстве, а также мобильный наземный комплекс наблюдения и управления, содержащий приемник изображений, выполненный с возможностью приема по радиоэфиру видеосигнала от передатчика изображений, портативный персональный компьютер и передатчик команд, выполненный с возможностью передачи по радиоэфиру на приемник команд сигналов управления полетом беспилотного летательного аппарата и ориентацией его в пространстве, отличающаяся тем, что в состав бортового комплекса наблюдения и слежения дополнительно введены блок сжатия данных, входы которого подключены соответственно к видеовыходу камеры наблюдения и к первому видеовыходу камеры слежения, а выход - к видеовходу передатчика изображений, корреляционное устройство, первый блок памяти, вход которого подключен к микропроцессору, а выход - к первому входу корреляционного устройства, и канал слежения, содержащий последовательно соединенные аналого-цифровой преобразователь, бортовое форматирующее устройство и второй блок памяти, а также камеру слежения, второй видеовыход которой подключен ко входу аналого-цифрового преобразователя, выход второго блока памяти подключен ко второму входу корреляционного устройства, выполненного с возможностью формирования сигнала корреляционной функции двух изображений, поступающих из первого и второго блоков памяти соответственно, и подачи этого сигнала на один из входов микропроцессора, выполненного с возможностью преобразования указанного сигнала корреляционной функции в команды управления блоком рулевых машинок, а в мобильный наземный комплекс наблюдения и управления введен формирователь кадра, вход которого подключен к выходу приемника изображений, а выход - к видеовходу портативного персонального компьютера, выход которого соединен со входом передатчика команд.
| АВИАЦИОННЫЙ РАЗВЕДОВАТЕЛЬНЫЙ КОМПЛЕКС | 1992 |
|
RU2067952C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ АВИАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2015067C1 |
| US 5054713 A, 08.10.1991 | |||
| US 4955962 A, 11.09.1990. | |||

