Изобретение относится к области медицины, а именно к травматологии-ортопедии и неврологии, и может быть использовано для выявления асимметрий движений, диагностики и определения тяжести функциональных нарушений опорно-двигательного аппарата, дифференциальной диагностики при травмах и заболеваниях различной этиологии по результатам стабилографических измерений.
Стабилометрия является объективным методом оценки функционального состояния опорно-двигательного аппарата в акте поддержания человеком вертикальной позы. Стабилометрическое исследование позволяет учитывать роль вестибулярного аппарата, зрительного анализатора, проприорецептивной системы, а также поражения суставов и позвоночника, определить опороспособность нижних конечностей.
При этом важной проблемой является выбор критериев оценки стабилографической информации, на основании которых может быть осуществлена диагностика патологических состояний, а также оценка тяжести нарушения функции равновесия. Под критерием понимается отдельный показатель (признак, переменная), значение которой вычисляется по некоторой формуле на основе непосредственно измеряемых с помощью стабилографической платформы значений фронтальной (ось X) и сагиттальной (ось Y) координат центра давления тела человека на платформу стабилографа, причем координаты определяются с заданной частотой измерения. Таким образом, непосредственно получаемым результатом отдельного стабилометрического теста является упорядоченный по номерам измерений, осуществляемым через фиксированный промежуток времени, набор пар чисел: фронтальная и сагиттальная координаты. Стандартным способом отображения результатов являются: фронтальная стабилограмма (изменение фронтальной координаты во времени), сагиттальная стабилограмма (изменение фронтальной координаты во времени) и статокинезиограмма (траектория перемещения центра давления стоп на плоскости опоры) [1].
Известен «классический» способ стабилографической оценки функции равновесия по данным стандартных показателей, таких как абсолютное положение центра давления, отклонения центра давления около среднего положения, длина статокинезиограммы, средняя скорость движения центра давления, средняя площадь статокинезиограммы, показатели спектра частот [2].
Недостатком данного способа является то, что эти параметры не отражают динамику стабилографического процесса, в частности диапазон изменения скорости и направления движения. Сравнительная оценка полученных показателей исследуемого пациента с аналогичными нормативными показателями позволяет лишь определить, соответствуют они норме или отличаются от нее.
Известен способ выявления асимметрий, при котором статокинезиограмма условно делится на большое количество равных по времени участков с частотой квантования 10-20 Гц, затем строится круговая диаграмма, состоящая из векторов различной длины и направления и представляющая собой ломаную линию [3]. На основании полученной круговой диаграммы можно делать заключение о преобладании отклонения тела в определенных направлениях.
Недостатком данного способа является то, что способ не позволяет определить динамические особенности движения, играющие основную роль при функциональной диагностике.
Известен способ выявления асимметрий, при котором после регистрации статокинезиограммы все векторы переносятся в начало координат и усредняются по секторам, после чего строится круговая диаграмма направлений колебаний [4]. Отличие круговой диаграммы направлений колебаний от вышеописанной диаграммы положения состоит в том, что она посекторно отражает не средние значения радиуса отклонения, а средние значения самих векторов. Круговая векторная диаграмма направлений колебаний позволяет судить о скорости перемещения центра давления в том или ином направлении.
Недостатком известного способа является использование процедур усреднения значений векторов по секторам, что не позволяет судить об их функции распределения и, само по себе, не дает возможности учитывать индивидуальные особенности статокинезиограмм. Кроме того, известный способ не отображает существенную с точки зрения диагностики последовательность векторов во времени, исключая тем самым возможность выявления зависимости скорости и направления движения от положения, скорости и направления движения в предшествующий момент времени, что не позволяет осуществлять диагностику индивидуальной динамики патологического процесса у пациента.
Известен способ оценки общего функционального состояния человека, включающий съем, запись и анализ стабилографических показателей, согласно которому тестирование проводят в несколько этапов с разной степенью сложности выполняемых заданий по поддержанию человеком вертикальной позы, измеряют и фиксируют траекторию движения центра давления тела человека на стабилографическую платформу, после чего путем векторного анализа полученной статокинезиограммы формируют интегральный показатель качества функции равновесия в виде коэффициента экспоненциальной зависимости ƒ(n)=l-en, аппроксимирующей график кумулятивной зависимости относительной частоты вершин векторов в равных по площади концентрических зонах статокинезиограммы, проводят сравнение показателя качества функции равновесия с заранее заданным значением или интервалом значений и по результатам сравнения делают вывод об общем функциональном состоянии человека [5].
Данный способ не устраняет вышеприведенные недостатки использования круговых векторных диаграмм, связанные с использованием усреднений. Кроме того, использование одного числового критерия для интегральной оценки качества функции равновесия или функционального состояния не дает возможности конкретизировать причины отклонения критерия от нормы, так как одно и то же значение критерия может быть получено при различных патологиях.
Известен способ диагностики функциональных нарушений опорно-двигательного аппарата, включающий тестирование обследуемого человека на стабилографической платформе, съем, запись и анализ стабилографических показателей по статокинезиограмме, отличающийся тем, что при тестировании обследуемого человека на стабилографической платформе фиксируют по отдельности изменения фронтальной и сагиттальной координат, получают фронтальную и сагиттальную стабилограмму, фиксируют траекторию движения центра тяжести по плоскости платформы, получают статокинезограмму, после чего определяют по стабилограммам интервалы движения с постоянной скоростью по каждой из координат, определяют по статокинезиограмме интервалы движения с постоянной, в том числе - нулевой, линейной скоростью и с постоянной угловой скоростью по траектории, определяют расстояния по координатам, траектории и углы, проходимые за каждый из интервалов, определяют величины изменений скоростей на границах интервалов и количества интервалов каждой продолжительности с конкретной скоростью, формируют обобщенные интервалы неизменного движения, полученные числовые результаты визуализируют, отображая в графическом виде, и выявляют индивидуальные особенности, характеризующие процесс удерживания равновесия пациентом, путем сопоставления полученных значений с нормативными показателями [6].
Недостатком известного способа является его низкая достоверность, обусловленная тем, что в качестве критерия используется один показатель, как правило, вычисляемый на основании некоторого формульно или алгоритмически определенного метода. Например, используются: индекс динамической стабилизации [7], интегральный показатель качества функции равновесия [8]. Как следствие, по значению одного числового показателя, можно определить факт наличия функционального нарушения путем сравнения полученного при обследовании пациента значения показателя с нормой (диапазона значений показателя для лиц с отсутствием патологий), но нельзя выявить причины вызвавшие данное нарушение, так как одно и то же «плохое» значение показателя может обуславливаться различными патологиями (на самом обобщенном уровне разделения - анатомические или функциональные нарушения нервной системы, анатомические или функциональные нарушения мышечной системы, анатомические или функциональные нарушения костно-суставного аппарата). Необходимо отметить, что в области травматологии данный недостаток становится критическим, поскольку травматическое повреждение, как правило, одновременно захватывает элементы и костно-суставной, и нервной, и мышечной систем. Основной задачей диагностики при этом является как можно более точная локализация патологических процессов, определение их тяжести и степени влияния различных по типу и тяжести повреждений на функциональное состояние человека.
Известен способ захвата и распознавания жестов человека для управления наиболее близкими электронными устройствами с помощью жестов, заключающийся в том, что на запястья рук человека крепятся различные беспроводные датчики измерения проекции ускорения, углов ориентации тела, магнитного поля и т.д., при движении конечностей информация передается на компьютеризированное устройство, обрабатывается и используется для управления и взаимодействия человека с электронными устройствами [9].
Недостатком данного способа является отсутствие анализа показании браслетов с двух конечностей и оценки степени их различия путем анализа частотных характеристик спектра значений показаний акселерометра в разных упражнениях.
Заявляемое изобретение обеспечивает повышение технологических возможностей способа, многовариантное моделирование и оценку асимметрии деятельности опорно-двигательного аппарата в акте выполнения определенных движений.
Технический результат изобретения позволяет создать условия, которые имеют диагностическое и методическое преимущество по сравнению с известными способами диагностики.
Технический результат достигается тем, что способ для выявления асимметрии движений согласно которому на запястья рук испытуемого крепят различные беспроводные датчики измерения проекции ускорения и углов ориентации тела, при котором информацию о движении передают на компьютеризированное устройство, согласно изобретения, беспроводные датчики измерения проекции ускорения и углов ориентации тела дополнительно крепят также на нижние конечности, причем места крепления датчиков на группы мышц одинакового назначения верхних и нижних конечностей строго фиксированы и зеркально симметричны относительно вертикальной оси тела человека, информацию с датчиков передают на компьютеризированное устройство в процессе выполнения различных физических упражнений, затем анализируют спектры значений показаний датчиков, формируют область допустимых отклонений асимметрии движений для данной группы физических упражнений, представленную в виде модели «среднего» пользователя, формируют модель движений конечностей испытуемого формируют модель движений конечностей испытуемого, формируют модель движений конечностей испытуемого, асимметрию движений диагностируют на основании анализа спектра представленных измерений сравнении с допустимыми отклонениями модели «среднего» пользователя.
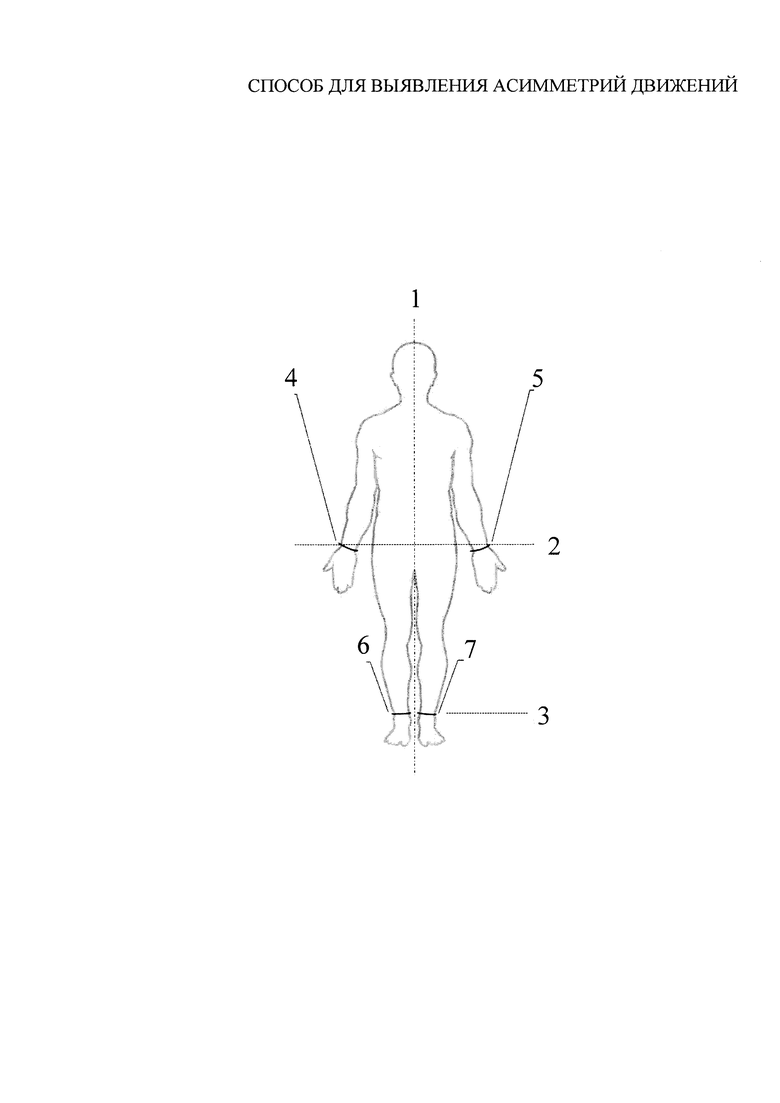
На фиг. представлена схема расположения беспроводных датчиков измерения проекции ускорения и углов ориентации тела, где 1 - вертикальная ось тела человека, 2 - зеркальная симметрия датчиков верхних конечностей, 3 - зеркальная симметрия датчиков нижних конечностей, 4 - датчики верхней правой конечности, 5 - датчики верхней левой конечности, 6 - датчики нижней правой конечности, 7 - датчики нижней левой конечности.
Предлагаемый способ выявления асимметрий движений осуществляется следующим образом.
На верхние и нижние конечности испытуемого крепят беспроводные датчики измерения проекции ускорения и углов ориентации тела, например, акселерометры и гороскопы.
Места крепления датчиков на верхних конечностях строго фиксированы и зеркально симметричны относительно вертикальной оси 1 тела человека.
Места крепления датчиков на нижних конечностях также строго фиксированы и зеркально симметричны относительно вертикальной оси 2 и 3 тела человека.
Испытуемый выполняет комплекс физических упражнений, во время которого измеряют проекции ускорений с помощью акселерометра для фиксирования силы ускорения каждой из конечностей и углы ориентации конечностей, которые необходимы для проведения анализа частотных характеристик спектра.
Результаты измерения проекции ускорения и углов ориентации конечностей с акселерометров и гироскопов фиксируют, передают в компьютеризированное устройство и интерпретируют с использованием графических методов анализа данных.
В компьютеризированном устройстве с использованием статистических методов формируют область допустимых отклонений асимметрии движений для данной группы физических упражнений, представленную в виде модели «среднего» пользователя.
Затем в компьютеризированном устройстве формируют модель движений конечностей испытуемого, которая является основой для вынесения решения о состоянии опорно-двигательного аппарата и асимметрии движений посредством сравнения с моделью «среднего» пользователя. Решение о нарушении осанки и диспропорции развития групп мышц выносят на основании анализа спектра представленных измерений сравнении с допустимыми отклонениями модели «среднего» пользователя.
При осуществлении заявляемого способа могут использоваться известные технические решения и средства, для компьютерной обработки информации может быть использовано известное или оригинальное программное обеспечение.
Заявляемый способ позволяет обеспечить повышение технологических возможностей способа, многовариантное моделирование и оценку асимметрии деятельности опорно-двигательного аппарата в акте выполнения определенных движений. Изобретение позволяет создать условия, которые способствует вынесению решения о состоянии опорно-двигательного аппарата и асимметрии движений при физической активности.
Таким образом, заявляемый способ выявления асимметрий движений обладает новыми свойствами, обусловливающими получение положительного эффекта.
Источники информации
1. Пат. №2497451 РФ. Способ диагностики функциональных нарушений опорно-двигательного аппарата / Монтиле А.И., Давыдов О.Д., Кузнецова Н.Л., Марчук Ю.В. Опубл. 10.11.2013.
2. Kapteyn T.S., Bles W., Njiokiktjien Ch.J. et al. Standardization in platform Stabilometry being a part of posturography // Agressologie, 1983, №24, Vol. 7. - P.321-326.
3. Okuzano Т. Vector statokinesiogram. A new method of analysis of human body sway. Pract. Otol. Kyoto. 1983. - Vol. - 76, №10. - P. 2565-2580.
4. Киреева Т.Б. Автоматизация обработки стабилограмм для физиологических исследований и клинического использования. Медицинские информационные системы. Выпуск 4 (XI). Таганрог, 1993, С. 131-136.
5. Пат. №2165733 РФ. Способ оценки общего функционального состояния человека / Кондратьев И.В., Переяслов Г.А., Слива С.С, Усачев В.И. Опубл. 27.04.2001.
6. Пат. №2442533 РФ. Аппаратный комплекс для регистрации, анализа и моделирования структурно-двигательного аппарата человека / Бушков С.Н., Новосельский А.Н., Быков А.А., Сеницкий И.А. Опубл. 20.02.2012.
7. Пат. №2380035 РФ. Способ оценки функционального состояния человека (идс) / Усачев В.И., Кононов А.Ф., Артемов В.Г. Опубл. 27.01.2010.
8. Пат. №2165733 РФ. Способ оценки общего функционального состояния человека / Кондратьев И.В., Переяслов Г.А., Слива С.С., Усачев В.И. Опубл. 27.04.2001.
9. Патент WO 2014171909 А1. Устройство управления при помощи жестов / Степанов А.В. Опубл. 23.10.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ВИДА АТАКСИИ | 2002 |
|
RU2257845C2 |
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ РАССТРОЙСТВ | 2013 |
|
RU2545894C2 |
| СПОСОБ ДИАГНОСТИКИ ФУНКЦИОНАЛЬНЫХ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2497451C1 |
| СПОСОБ ОЦЕНКИ РЕЗУЛЬТАТОВ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ БОЛЬНЫХ С ДВИГАТЕЛЬНЫМИ НАРУШЕНИЯМИ | 2013 |
|
RU2524124C1 |
| СПОСОБ ПОВЫШЕНИЯ ИНФОРМАТИВНОСТИ СТАБИЛОМЕТРИЧЕСКОГО ИССЛЕДОВАНИЯ И АППАРАТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2665957C2 |
| СПОСОБ КАЧЕСТВЕННОЙ ОЦЕНКИ ФУНКЦИИ РАВНОВЕСИЯ | 1999 |
|
RU2175851C2 |
| Способ оценки качества удержания вертикального положения | 2023 |
|
RU2833267C1 |
| СПОСОБ КОНСЕРВАТИВНОГО ЛЕЧЕНИЯ ОРТОПЕДИЧЕСКОЙ ПАТОЛОГИИ | 2009 |
|
RU2401088C1 |
| СПОСОБ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ ТЕЛА ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325847C2 |
| Способ и система последовательного восстановления и развития когнитивных и двигательных функций человека | 2024 |
|
RU2828533C1 |
Изобретение относится к медицине, а именно к травматологии, ортопедии и неврологии, и может быть использовано при выявлении асимметрий движений. Для этого на запястья рук и нижние конечности испытуемого крепят различные беспроводные датчики измерения проекции ускорения и углов ориентации тела. Причем места крепления датчиков на группы мышц одинакового назначения верхних и нижних конечностей строго фиксированы и зеркально симметричны относительно вертикальной оси тела человека. Информацию с датчиков передают на компьютеризированное устройство в процессе выполнения различных физических упражнений. Затем анализируют спектры значений показаний датчиков, формируют область допустимых отклонений асимметрии движений для данной группы физических упражнений, представленную в виде модели «среднего» пользователя. Формируют модель движений конечностей испытуемого. Асимметрию движений диагностируют на основании анализа спектра представленных измерений сравнении с допустимыми отклонениями модели «среднего» пользователя. Способ обеспечивает достоверную оценку асимметрии деятельности опорно-двигательного аппарата в акте выполнения определенных движений за счет возможности многовариантного моделирования и сравнения посредством использования статистических методов для данной группы упражнений. 1 ил.
Способ для выявления асимметрии движений, согласно которому на запястья рук испытуемого крепят различные беспроводные датчики измерения проекции ускорения и углов ориентации тела, при котором информацию о движении передают на компьютеризированное устройство, отличающийся тем, что беспроводные датчики измерения проекции ускорения и углов ориентации тела дополнительно крепят также на нижние конечности, причем места крепления датчиков на группы мышц одинакового назначения верхних и нижних конечностей строго фиксированы и зеркально симметричны относительно вертикальной оси тела человека, информацию с датчиков передают на компьютеризированное устройство в процессе выполнения различных физических упражнений, затем анализируют спектры значений показаний датчиков, формируют область допустимых отклонений асимметрии движений для данной группы физических упражнений, представленную в виде модели «среднего» пользователя, формируют модель движений конечностей испытуемого, асимметрию движений диагностируют на основании анализа спектра представленных измерений в сравнении с допустимыми отклонениями модели «среднего» пользователя.
| WO 2014171909 A1, 23.10.2014 | |||
| Способ нанесения импульсных отметок на ферромагнитную ленту | 1950 |
|
SU91275A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АСИММЕТРИИ ДВИЖЕНИЯ КИСТЕЙ РУК | 1995 |
|
RU2122828C1 |
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2146494C1 |
| US 2002040601 A1, 11.04.2002 | |||
| ДУБРОВСКИЙ В.И | |||
| и др | |||
| Биомеханика | |||
| М.: ВЛАДОС-ПРЕСС, 2003, с.372 (последний абзац). | |||

