Изобретение относится к области тренажеров, в частности к балансирам -профилактическим или игровым средствам, способствующим закреплению двигательных функций, удержанию равновесия и поддержания строго вертикального положения тела, и позволяет количественно оценить способность испытуемого сохранять строго вертикальное положение в течение интервала наблюдения. Тестирование испытуемого проводят с помощью платформы, содержащей инерциальный датчик с трехосным микроэлектромеханическим акселерометром.
Из показателей, характеризующих способность человека удерживать равновесие, известны [1]:
- число колебаний в 1 мин.;
- средняя и максимальная амплитуда колебаний;
- площадь стабилограммы или статокинезиограммы;
- коэффициент Ромберга - отношение средней амплитуды колебаний тела при закрытых глазах к средней амплитуде колебаний при открытых глазах;
- суммарная амплитуда колебаний (в мм) Ю.В. Терехова;
- коэффициент устойчивости И.И. Розена, равный отношению суммы всех отклонений общего центра тяжести тела в одной из плоскостей или их равнодействующей Y и некоторой постоянной Г к последней;
- коэффициент подвижности И.И. Розена, равный отношению общей амплитуды колебаний общего центра тяжести тела в одной из плоскостей Y и проекции кривой на ось абсцисс X к последней.
Известно [2-4], что в настоящее время в платформах для измерения и/или контроля углового положения испытуемых широко применяются микроэлектромеханические (MEMS) акселерометры, однако в источниках [2-4] не вводится показатель качества удержания вертикального положения.
К примерам устройств, в которых осуществляется количественный контроль удержания вертикального положения, следует отнести изобретение [5] и заявку [6], в которых соответственно измеряются количество колебаний в разные стороны испытуемого, и текущий угол отклонения нормали к плоскости устройства от вертикали.
При этом реализация способа контроля качества удержания вертикального положения в устройствах с MEMS акселерометром по аналогии с [5, 6] будет иметь следующие недостатки:
- вызванные собственными шумами MEMS сенсора многочисленные ложные срабатывания по факту перехода через угломестную плоскость из одной полусферы в другую при строгом удержании вертикального положения при использовании показателя из [5];
- различия в показаниях различных устройств для одинаково удерживающих угловую ориентацию испытуемых, вызванные различиями уровня собственных шумов, масштабных множителей и постоянных смещений их чувствительных элементов [6].
В патенте [7] раскрыты способ и устройство для коррекции и измерения баланса и осанки тела. Для измерения качества балансирования в [7] используется оптическая система позиционирования с семью закрепляемыми на спине испытуемого маркерами. Показатель качества балансирования overall score при этом рассчитывается как среднее арифметическое двух частных показателей:
1) показателя sway score - дисперсии линейного перемещения семи маркеров по осям X, Y и Z,
2) показателя alignment score, вычисляемого через величину суммарного абсолютного перемещения маркеров по осям X, Y и Z, при этом суммарное перемещение рассчитывается для ста кадров, умножается на нормирующий множитель 0,002 и вычитается из 100.
Данный способ, как следует из его описания, требует применения оптической системы позиционирования, которая, как правило, при своей аппаратной реализации является более дорогой, чем устройства с инерциальными MEMS датчиками.
По совокупности признаков в качестве прототипа выбран способ качественной оценки функции равновесия [8]. Способ прототипа позволяет выяснить функциональное состояние человека по оценке его способности сохранять вертикальную позу. Для этого проводят тестирование обследуемого пациента на стабилографической платформе и осуществляют векторный анализ статокинезиограммы. Полученное облако значений векторов разделяется концентрическими кругами равной площади на несколько зон, после чего производится подсчет количества вершин векторов, попавших в каждую зону, и относительной частоты вершин векторов в зоне. Затем строят график кумулятивной, т.е. накопительной, зависимости относительной частоты вершин векторов в зоне от порядкового номера зоны. Указанная зависимость носит экспоненциальный характер и аппроксимируется экспоненциальной функцией  при этом коэффициент X, который определяет крутизну зависимости, принимают за показатель, характеризующий качество функции равновесия.
при этом коэффициент X, который определяет крутизну зависимости, принимают за показатель, характеризующий качество функции равновесия.
Если способ прототипа распространить на устройства удержания вертикального положения с чувствительными элементами в виде MEMS акселерометров, то для него будут характерны те же недостатки, что и для [6].
Таким образом, техническая проблема заключается в различиях численных критериев качества удержания равновесия одинаково удерживающих угловую ориентацию испытуемых ввиду различия характеристики чувствительных элементов на основе трехосных MEMS акселерометров для балансировочной платформы.
Технический результат, достигаемый заявляемым изобретением, заключается в разработке численного критерия качества удержания равновесия, учитывающего характеристики чувствительных элементов балансировочной платформы.
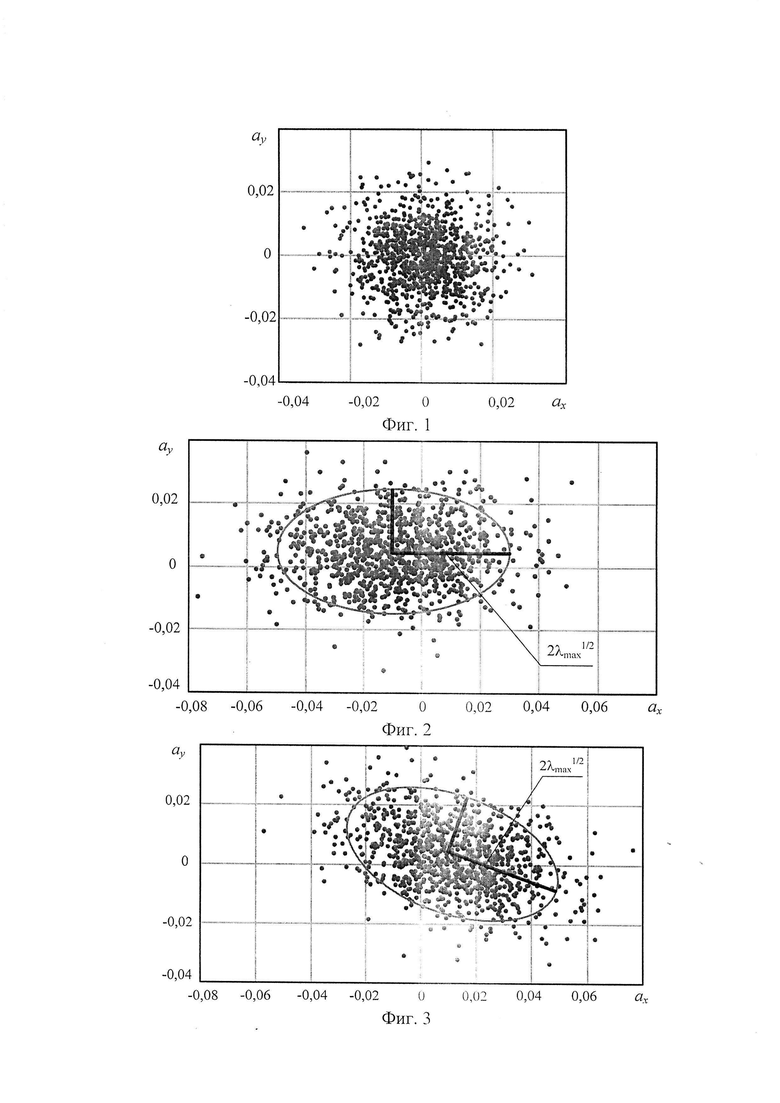
Технический результат достигается следующим образом. Без нарушения общности решаемой задачи будем полагать, что оси чувствительности сенсора на основе трехосного акселерометра для балансировочной платформы ориентированы следующим образом: ось X - вперед, ось Y - влево, ось Z - вверх, а выдаваемые им измерения нормированы к величине ускорения свободного падения g. Если акселерометр предварительно откалиброван, т.е. известны его масштабные коэффициенты и постоянные смещения для каждой оси чувствительности [9], то для идеально горизонтированной балансировочной платформы множество проекций вектора ускорения свободного падения на плоскость XY будет иметь вид, представленный на фиг. 1. Разброс точек проекций в направлении осей X и Y будет одинаковым и будет определяться среднеквадратическим отклонением (СКО) собственных шумов измерений акселерометра σш; математические ожидания mx=my=0. На фиг. 1 принято σш=σx=σy=0,01.
При балансировании испытуемого в течение интервала наблюдения математические ожидания mx и my будут определять средний угол отклонения от вертикали Δϕ за время балансирования,

где  ,
,  ,
,  - математические ожидания проекций вектора-столбца измерений трехосного MEMS акселерометра
- математические ожидания проекций вектора-столбца измерений трехосного MEMS акселерометра  на оси чувствительности X, Y и Z соответственно с учетом компенсированных постоянных смещений и масштабных множителей [9], a N-количество измерений MEMS акселерометра за время обследования испытуемого.
на оси чувствительности X, Y и Z соответственно с учетом компенсированных постоянных смещений и масштабных множителей [9], a N-количество измерений MEMS акселерометра за время обследования испытуемого.
Угловые перемещения платформы вокруг осей X и Y могут быть как не коррелированными (фиг. 2, mx=-0,01, my=0,005, σx=0,02, σy=0,01, коэффициент корреляции ρ=0), так и коррелированными между собой (фиг. 3, mx=0,01, my=0,005, σx=0,02, σy=0,01, коэффициент корреляции ρ<0).
Для исключения корреляции между векторами проекций  и
и  целесообразно использовать метод анализа главных компонент [10] и принять за величину а, характеризующую максимальный разброс точек проекций, корень квадратный из максимального собственного числа λmax ковариационной матрицы С проекций векторов измерений vi на азимутальную плоскость XY за время измерений:
целесообразно использовать метод анализа главных компонент [10] и принять за величину а, характеризующую максимальный разброс точек проекций, корень квадратный из максимального собственного числа λmax ковариационной матрицы С проекций векторов измерений vi на азимутальную плоскость XY за время измерений:
элементы которой

Для минимизации влияния СКО шума сенсора σш на результаты измерений при учете качества балансирования введем в рассмотрение нормированное СКО
которое будет выступать штрафным множителем для среднего угла отклонения от вертикали Δϕ за время балансирования. Таким образом, критерий для количественного измерения качества удержания вертикального положения испытуемого за время балансирования:
Большее значение согласно введенному γ соответствует худшему качеству удержания вертикального положения. При этом при одинаковом среднем угловом отклонении от вертикали Δϕ за время балансирования качество удержания вертикального положения тем хуже, чем выше нормированное СКО измерений 
Способ оценки качества удержания вертикального положения заключается тестировании испытуемого человека на балансировочной платформе, которая подвижна в плоскостях угла места и крена. Чувствительным элементом балансировочной платформы является трехосный микроэлектромеханический акселерометр. При этом по результатам балансирования в течение времени наблюдения формируют показатель γ, характеризующий способность испытуемого сохранять равновесие.
Для вычисления γ оценивают среднее угловое отклонение от вертикали за время удержания вертикального положения Δϕ, оценивают среднеквадратическое отклонение собственных шумов измерительного устройства σш и определяют максимальное собственное число λmax ковариационной матрицы С для проекций вектора измерений v на азимутальную плоскость. Искомый показатель, характеризующий качество удержания вертикального положения, вычисляют по формуле
При этом при известных калибровочных параметрах, т.е. векторе постоянных смещений  векторе масштабных множителей
векторе масштабных множителей  выполняют их компенсацию:
выполняют их компенсацию:
Большинство современных цифровых MEMS акселерометров имеют соответствующие регистры управления для записи в них поправочных коэффициентов b и k, что позволяет выполнять указанную компенсацию непосредственно внутри измерительного сенсора.
Список литературы
1. Винарская Е.Н., Кууз Р.А., Фирсов Г.И. Методы компьютерной стабилометрии для решения задач функциональной диагностики в неврологии // Биомедицинская радиоэлектроника. 2001. № 5-6. С. 24-33.
2. Патент US 9044634 В2. Dynamically configurable balancing board, МПК A63B 22/14 (2006.01), A63B 71/00 (2006.01), A63B 26/00 (2006.01), A63B 22/18 (2006.01), A63B 21/008 (2006.01), дата публикации: 02.06.2015.
3. Заявка BR 102021014410-6 А2. Plataforma 
 como controle de jogos digitals voltados a treinamento,
como controle de jogos digitals voltados a treinamento,  e entretenimento, МПК А63В 22/16 (2006.01); А63В 21/00 (2006.01); А63В 26/00 (2006.01); A63F 13/20 (2006.01), дата публикации: 31.01.2023.
e entretenimento, МПК А63В 22/16 (2006.01); А63В 21/00 (2006.01); А63В 26/00 (2006.01); A63F 13/20 (2006.01), дата публикации: 31.01.2023.
4. Патент US 10434394 В2. Movable support for exercise equipment, МПК A63B 69/16 (2006.01), A63B 22/00 (2006.01), дата публикации: 08.10.2019.
5. Патент РФ 2701410. Тренажер для скрининг-мониторинга вестибулярной устойчивости, МПК А63В 22/16 (2006.01), дата публикации: 26.09.2019.
6. Заявка WO 2019165501. Virtual locomotion device, МПК A63F 13/21 (2014.01), G06F 3/03 (2006.01), А63В 22/16 (2006.01), дата публикации: 06.09.2019.
7. Патент US 8845556 B1. Method and apparatus for body balance and alignment correction and measurement, МПК A61B 5/117 (2006.01), A61B 5/103 (2006.01), G06B 23/00 (2006.01), дата публикации: 30.09.2014.
8. Патент RU 2175851. Способ качественной оценки функции равновесия, МПК А61В 5/103 (2000.01), дата публикации: 20.11.2001.
9. Hung J.С., Thacher J.R., White H.V. Calibration of accelerometer triad of an IMU with drifting Z-accelerometer bias // Proc. of the IEEE Aerospace and Electronics Conference NAECON-1989, vol. 1. Dayton, 1989, p. 153-158.
10. Jolliffe I.Т., Cadima J. Principal component analysis: a review and recent developments// Philos. Trans. A Math. Phys. Eng. Sci. 2016. Vol. 374, No. 2065.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНТЕРВАЛА ВРЕМЕНИ УДЕРЖАНИЯ СТАТИЧЕСКОГО РАВНОВЕСИЯ ЧЕЛОВЕКА В ОРТОГРАДНОЙ ПОЗЕ | 2015 |
|
RU2577945C1 |
| Устройство для воспроизведения инфранизкочастотных гармонических ускорений | 1990 |
|
SU1763989A2 |
| Способ обнаружения механического воздействия для идентификации пользователя и устройство для его осуществления | 2016 |
|
RU2631977C1 |
| Способ неинвазивного определения биофизических сигналов | 2020 |
|
RU2761741C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ ДЛЯ ВЫЯВЛЕНИЯ АСИММЕТРИЙ ДВИЖЕНИЙ | 2017 |
|
RU2654600C1 |
| Устройство для воспроизведения инфранизкочастотных гармонических ускорений | 1989 |
|
SU1700485A1 |
Изобретение относится к области тренажеров, в частности к балансирам - профилактическим или игровым средствам, способствующим закреплению двигательных функций, удержанию равновесия и поддержанию строго вертикального положения тела, и позволяет количественно оценить способность испытуемого сохранять строго вертикальное положение в течение интервала наблюдения. Тестирование испытуемого проводят с помощью платформы, содержащей инерциальный датчик с трехосным микроэлектромеханическим акселерометром. Способ оценки качества удержания вертикального положения основан на формировании показателя, характеризующего способность испытуемого сохранять равновесие. Для оценивания данного показателя измеряют среднее угловое отклонение от вертикали за время удержания вертикального положения Δϕ, оценивают среднеквадратическое отклонение собственных шумов измерительного устройства σш и определяют максимальное собственное число Lmax ковариационной матрицы С для проекций вектора измерений v на азимутальную плоскость. Характеризующий качество удержания вертикального положения показатель вычисляют по формуле 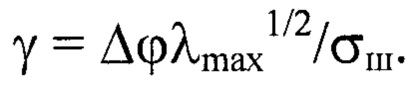 Измерения вектора v выполняют с помощью трехосного микроэлектромеханического акселерометра с известными масштабными множителями и постоянными смещениями для каждой из осей чувствительности. Технический результат - разработка численного критерия качества удержания равновесия, учитывающего характеристики чувствительных элементов балансировочной платформы. 1 з.п. ф-лы, 3 ил.
Измерения вектора v выполняют с помощью трехосного микроэлектромеханического акселерометра с известными масштабными множителями и постоянными смещениями для каждой из осей чувствительности. Технический результат - разработка численного критерия качества удержания равновесия, учитывающего характеристики чувствительных элементов балансировочной платформы. 1 з.п. ф-лы, 3 ил.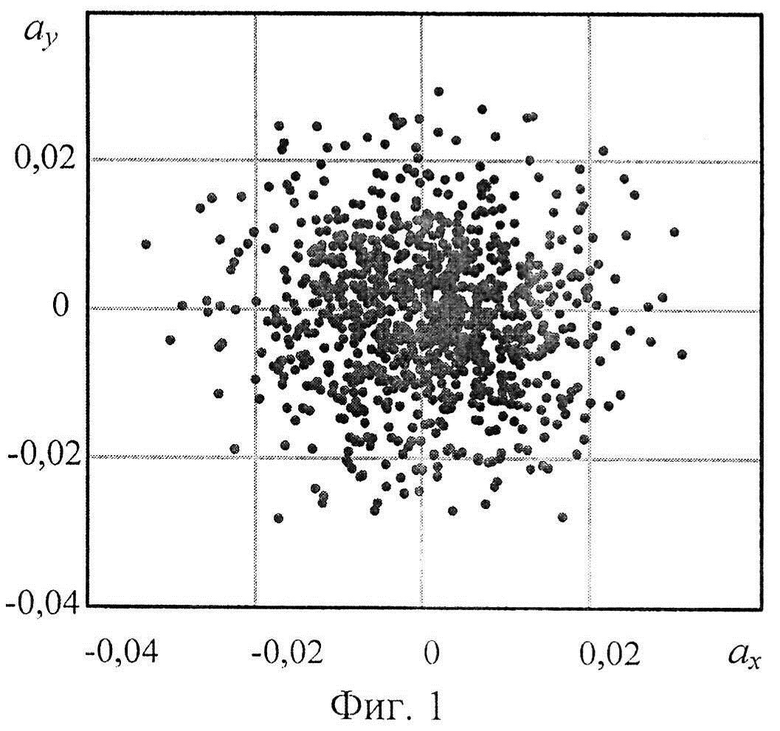
1. Способ оценки качества удержания вертикального положения, включающий векторный анализ данных, полученных при тестировании испытуемого на платформе, и формирование показателя, характеризующего способность испытуемого сохранять равновесие, в котором по векторам измерений вычисляют коэффициент, характеризующий качество функции равновесия, отличающийся тем, что измеряют среднее угловое отклонение от вертикали за время удержания вертикального положения Δϕ, оценивают среднеквадратическое отклонение собственных шумов измерительного устройства σш, определяют максимальное собственное число λmax ковариационной матрицы С для проекций вектора измерений v на азимутальную плоскость, а характеризующий качество удержания вертикального положения показатель вычисляют по формуле
2. Способ по п. 1, отличающийся тем, что измерения вектора v выполняют с помощью трехосного микроэлектромеханического акселерометра с известными масштабными множителями и постоянными смещениями для каждой из осей чувствительности.
| СПОСОБ ИССЛЕДОВАНИЯ ФУНКЦИИ РАВНОВЕСИЯ У ДЕТЕЙ В ВОЗРАСТЕ 3-6 МЕСЯЦЕВ ЖИЗНИ | 2015 |
|
RU2585142C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНТЕРВАЛА ВРЕМЕНИ УДЕРЖАНИЯ СТАТИЧЕСКОГО РАВНОВЕСИЯ ЧЕЛОВЕКА В ОРТОГРАДНОЙ ПОЗЕ | 2015 |
|
RU2577945C1 |
| WO 2018089916 A1, 17.05.2018 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ ТЕЛА | 2009 |
|
RU2517766C2 |
| US 8206325 B1, 26.06.2012 | |||
| US 10307086 B2, 04.06.2019 | |||
| DE 10312154 B4, 31.05.2007 | |||
| Доценко В.И | |||
| Введение в клиническую постурологию: качество удержания вертикальной позы - важный показатель общего и психоневрологического здоровья | |||

