СМЕЖНЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет по заявке США № 61/840,533, поданной 28 июня 2013 г., которая включена в настоящий документ путем ссылки.
ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение по существу относится к устройствам для доставки лекарственных средств, а более конкретно, к устройству для инфузии лекарственных средств, пригодному для ношения в виде патч-помпы, выполненной с возможностью доставки лекарственного средства пациенту дискретными болюсами. Описанное устройство может размещать команды от удаленного устройства посредством беспроводной телеметрии и включает в себя защитную блокировку для запрета или блокирования удаленных команд.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Устройства для доставки лекарственных средств для различных типов лекарственной терапии применяются все шире, так как автоматическая инфузия лекарственного средства может обеспечивать большую точность и надежность лечения пациента.
Диабет представляет серьезную угрозу здоровью, поскольку он может значительно ограничивать свободу действий и образ жизни лиц, страдающих этим заболеванием. Обычно лечение более тяжелой формы заболевания, сахарного диабета I типа (инсулинзависимого), требует одной или более инъекций инсулина в сутки, т. е. ежедневных многократных инъекций. Инсулин необходим для регулирования уровня глюкозы или сахара в крови и, таким образом, предотвращения гипергликемии, которая в отсутствие коррекции может привести к диабетическому кетоацидозу. Кроме того, неправильное проведение инсулинотерапии может привести к эпизодам гипогликемии, способным вызвать кому и смерть. Известна связь гипергликемии у больных диабетом с такими отдаленными последствиями, как заболевания сердца, атеросклероз, слепота, инсульт, гипертензия и почечная недостаточность.
Хорошо известно, что для предотвращения или, по меньшей мере, сведения к минимуму осложнений диабета I типа требуется частый контроль уровня глюкозы в крови. Контроль уровня глюкозы в крови также может быть полезен больным диабетом II типа (инсулиннезависимым), т. к. позволяет оценить эффективность контроля заболевания с помощью диеты и физической нагрузки. Таким образом, тщательный контроль уровня глюкозы в крови и возможность точной, удобной и своевременной инфузии инсулина в организм являются важными составляющими в процессе наблюдения и лечения диабета.
Для более эффективного контроля диабета и снижения ограничений, накладываемых этим заболеванием на образ жизни больного, были созданы различные устройства, облегчающие контроль уровня глюкозы в крови (ГК). Обычно такие устройства, или измерители, позволяют пациенту быстро и с минимальным физическим дискомфортом получить образец своей крови или тканевой жидкости для последующего анализа в измерителе. В большинстве случаев измеритель имеет устройство отображения, на котором отображается результат измерения ГК у пациента. Затем пациент может ввести себе соответствующую дозу, или болюс, инсулина. Для этого многим людям, больным диабетом, требуются ежедневные многократные инъекции инсулина. Во многих случаях такие инъекции вводятся самостоятельно.
Вследствие того, что отклонение уровней ГК, т. е. гипергликемия, может наносить урон здоровью, люди, испытывающие некоторые симптомы диабета, могут оказаться в ситуации, когда они не могут безопасно и точно ввести себе болюс инсулина. Кроме того, для людей, ведущих активный образ жизни, необходимость в ежедневных многократных инъекциях инсулина для контроля уровня глюкозы в крови крайне неудобна и утомительна, так как может затруднять участие в определенных видах деятельности или препятствовать им. Для других людей, больных диабетом, ежедневные многократные инъекции просто могут быть не самым эффективным способом контроля уровня ГК. Именно поэтому были разработаны инсулиновые инфузионные помпы, способные дополнительно повысить как точность, так и удобство для пациента.
Инсулиновые помпы обычно представляют собой устройства для ношения на теле пациента, поверх одежды или под ней. Поскольку помпы носят на теле пациента, желательно, чтобы они имели малый размер и не мешали. Таким образом, пациентам желательно иметь более компактное устройство для доставки лекарственных средств, обеспечивающее надежную и точную доставку лекарственных средств. Дополнительно желательно, чтобы такая инфузионная система при ношении повторяла контуры тела пациента для уменьшения дискомфорта и случайного смещения и обеспечивала пациенту возможность выбора использования помпы с инфузионным набором или без него.
Кроме того, желательно, чтобы устройство было выполнено с возможностью, по меньшей мере, замены способов доставки многократных ежедневных инъекций предыдущего уровня техники, включив возможность доставки дискретных болюсов лекарственных средств. Более того, чтобы устройство оставалось незаметным, желательно обеспечить возможность полного управления устройством посредством удаленной телеметрии и включить в состав устройства средства блокировки механизма доставки лекарственных средств для предотвращения доставки в результате самопроизвольного срабатывания телеметрических средств или ложных радиосигналов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Элементы изобретения, которые считаются инновационными, подробно описаны в приложенных пунктах формулы изобретения. Для лучшего понимания признаков и преимуществ настоящего изобретения рекомендуется изучить приведенное ниже подробное описание, в котором изложены наглядные примеры осуществления, использующие принципы изобретения, а также прилагаемые чертежи, из которых:
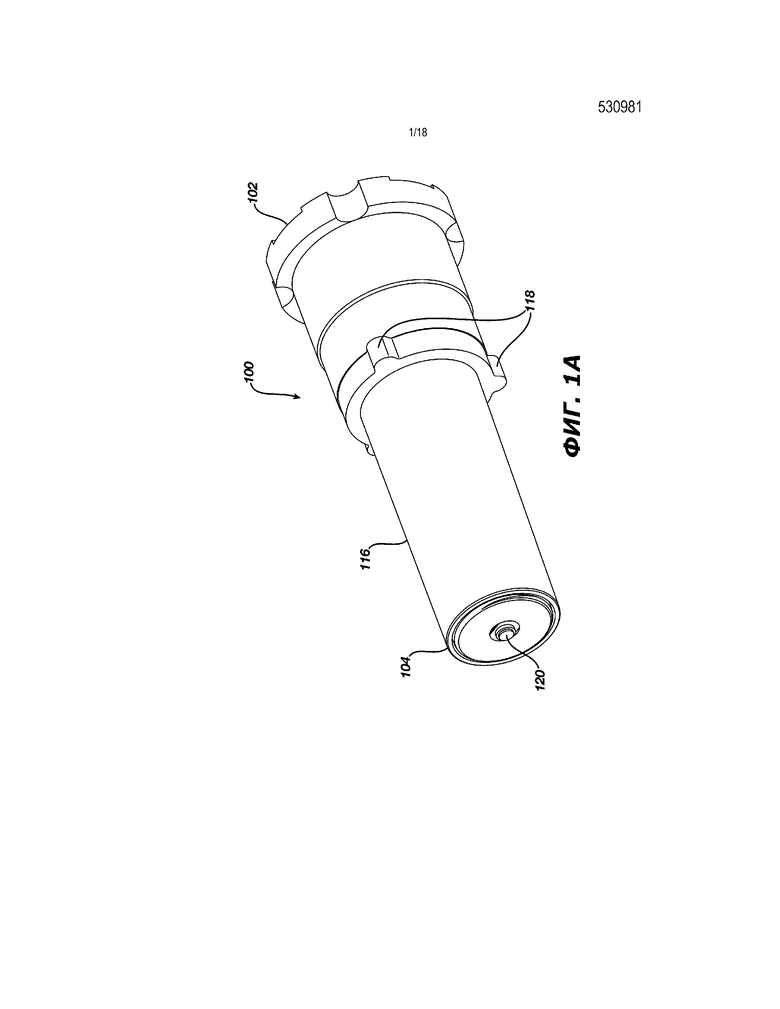
на ФИГ. 1A и 1B представлены соответственно вид в перспективе и вид в поперечном сечении в перспективе линейного приводного механизма в соответствии с примером осуществления настоящего изобретения, где приводной механизм находится в оттянутом положении;
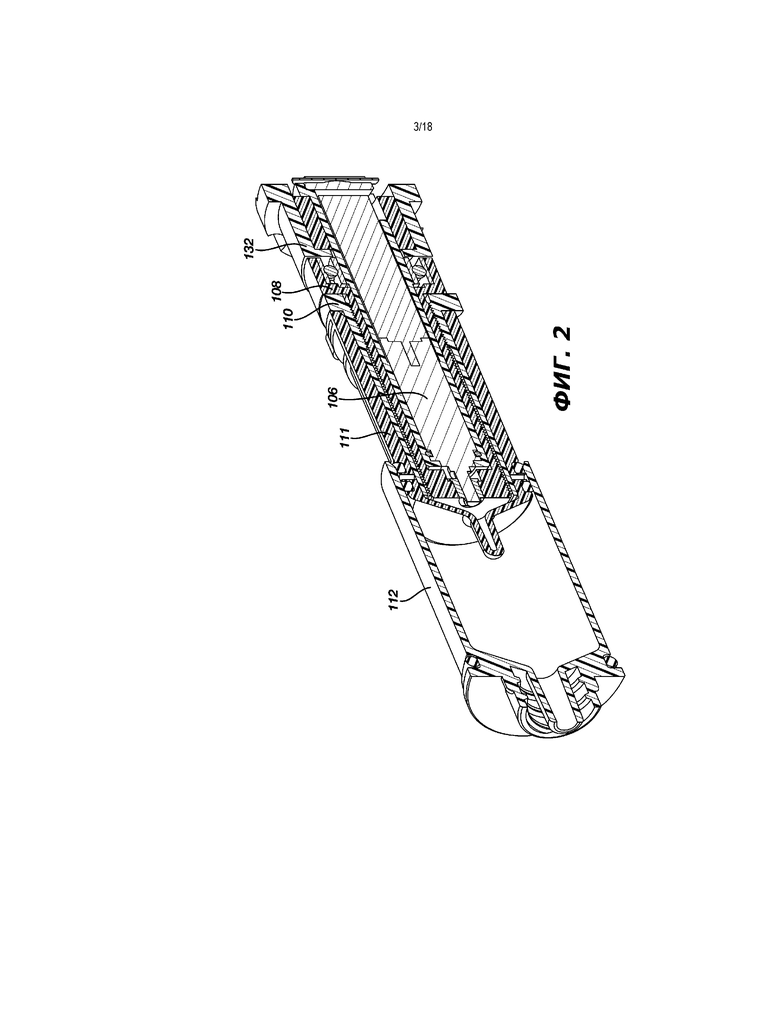
на ФИГ. 2 представлен вид в поперечном сечении в перспективе линейного приводного механизма, показанного на ФИГ. 1A и 1B, зацепляющегося с плунжером, вставленным в резервуар для лекарственных средств;
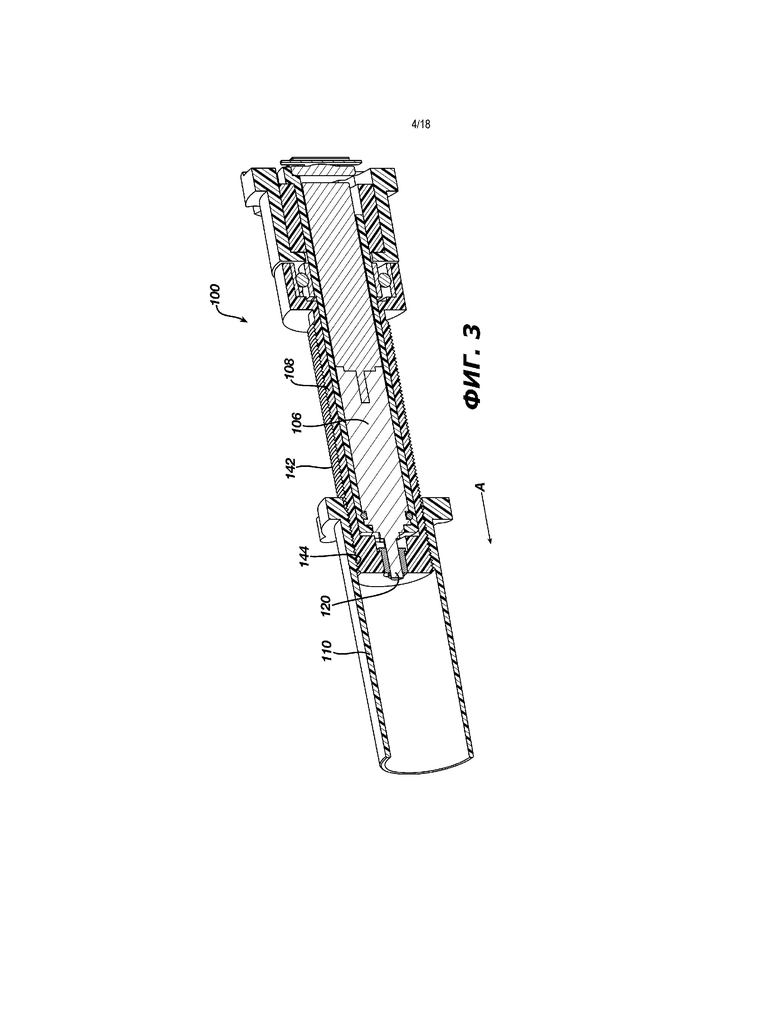
на ФИГ. 3 представлен вид в поперечном сечении в перспективе линейного приводного механизма, показанного на ФИГ. 1A и 1B, с выдвинутым поршнем;
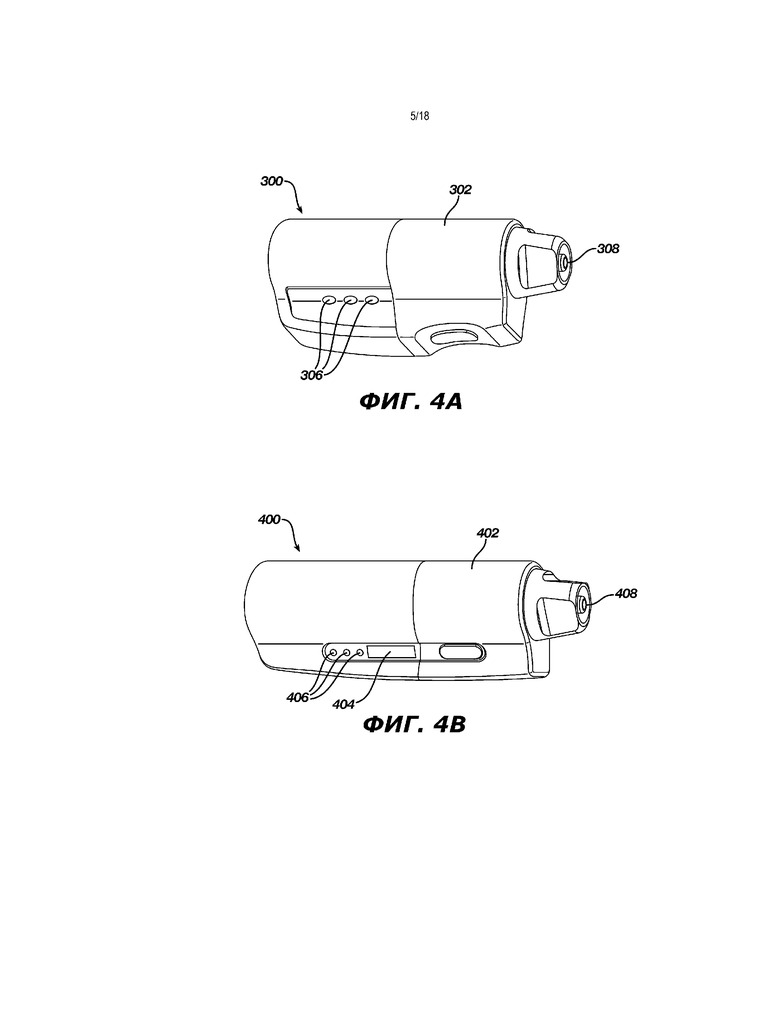
на ФИГ. 4A и 4B показаны упрощенные виды в перспективе устройств для доставки лекарственных средств, подходящих для применения с вариантами осуществления настоящего изобретения;
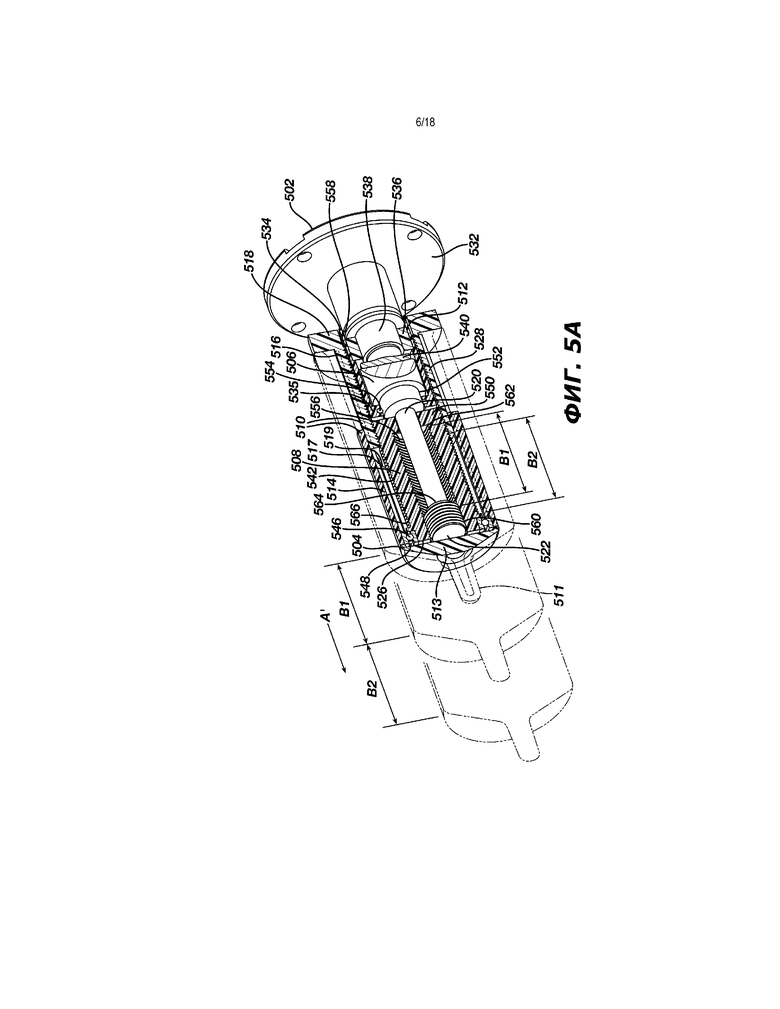
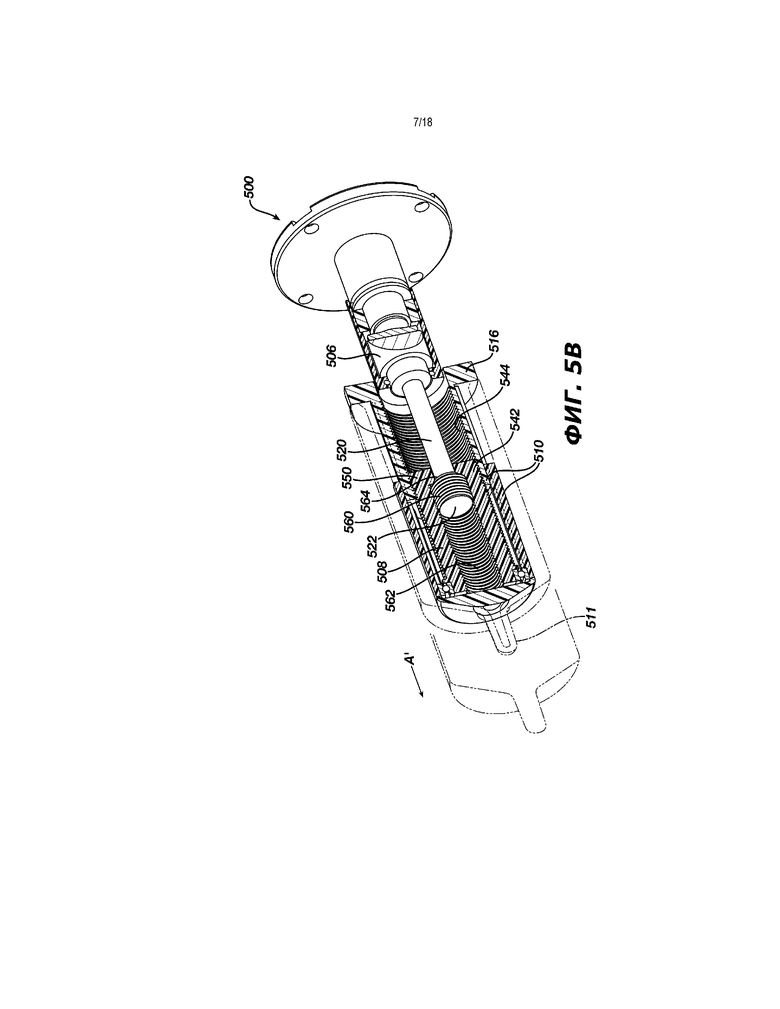
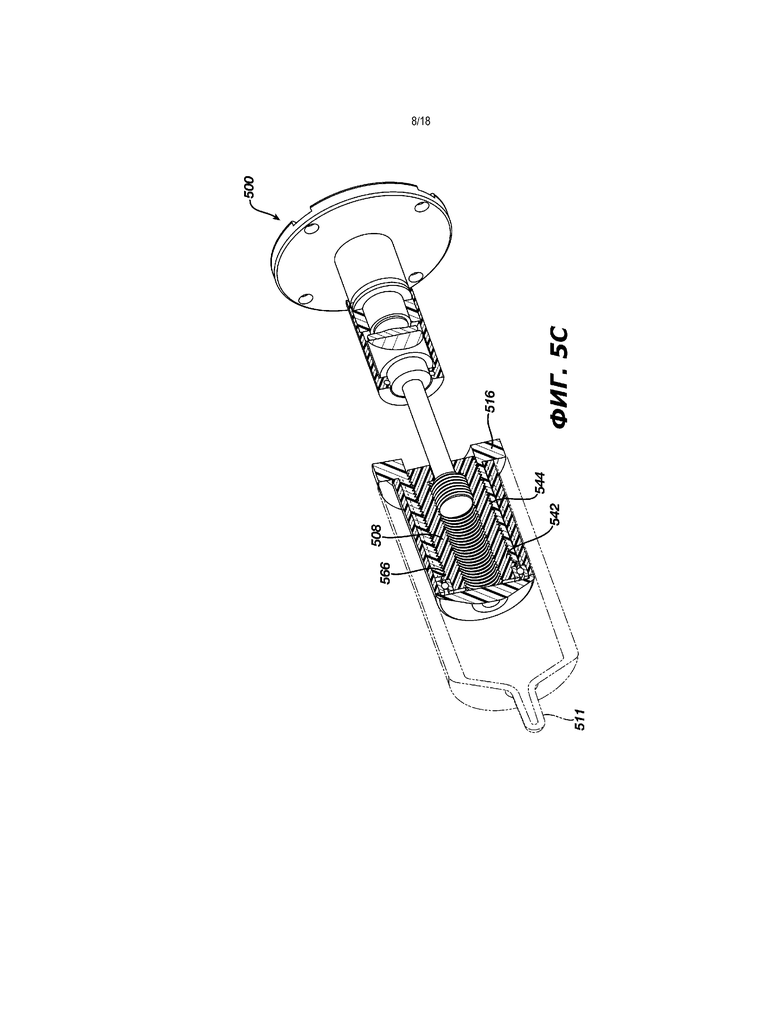
на ФИГ. 5A–5C представлены виды в поперечном сечении в перспективе линейного приводного механизма в соответствии с другим вариантом осуществления настоящего изобретения, где поршень показан в оттянутом, промежуточном и выдвинутом положениях соответственно; и
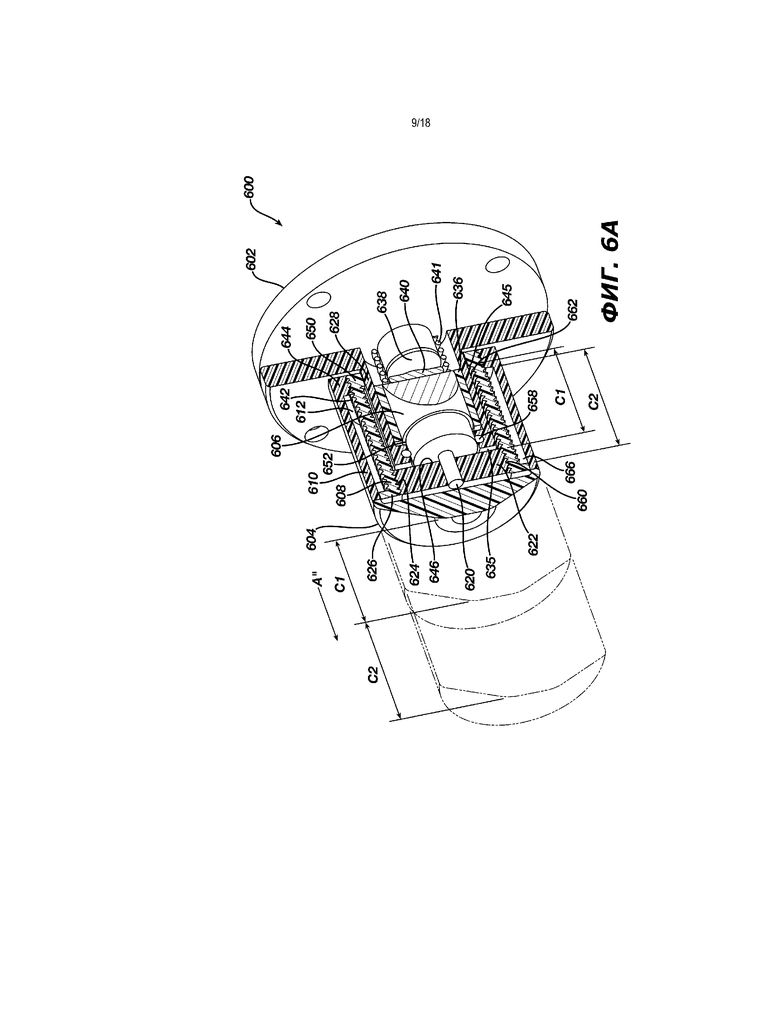
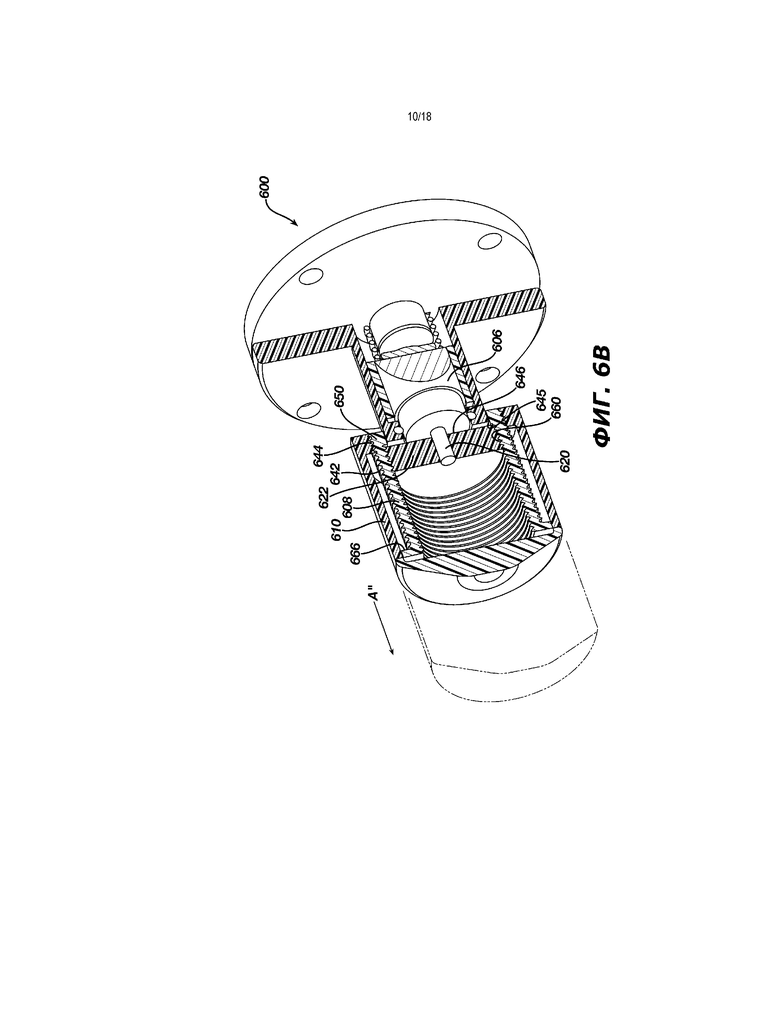
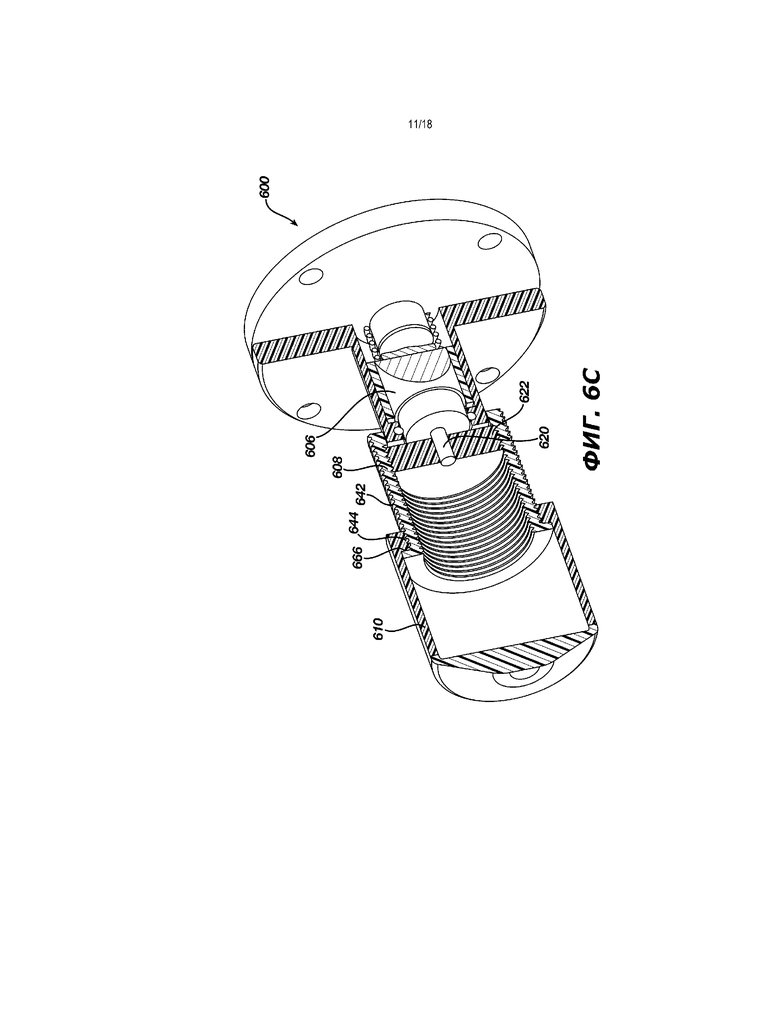
на ФИГ. 6A–6C представлены виды в поперечном сечении в перспективе линейного приводного механизма в соответствии с еще одним вариантом осуществления настоящего изобретения, где поршень показан в оттянутом, промежуточном и выдвинутом положениях соответственно.
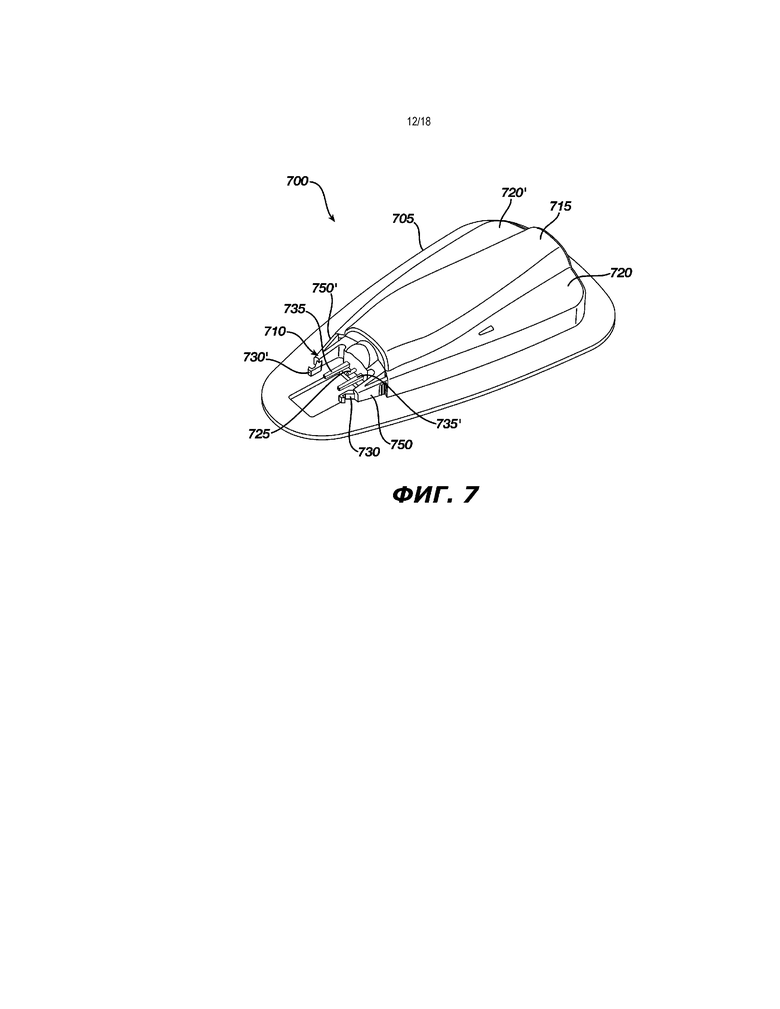
На ФИГ. 7 показан вид в перспективе инфузионной помпы в соответствии с вариантом осуществления изобретения, где инфузионная помпа включает адаптер для размещения люэровского соединителя инфузионного набора.
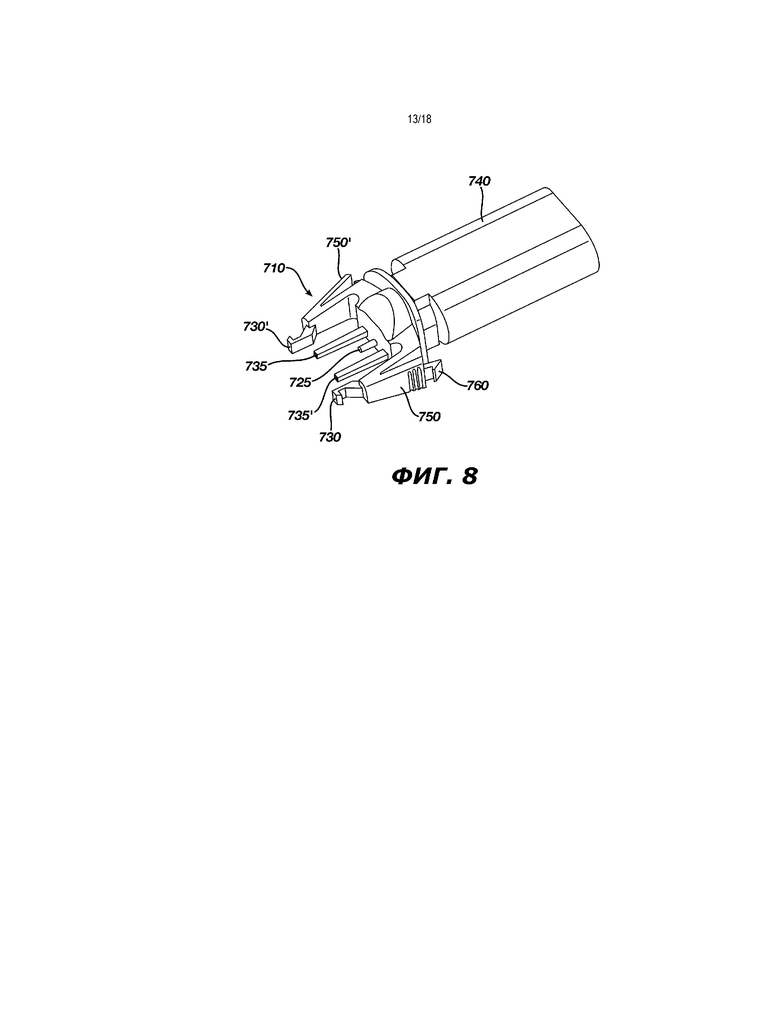
На ФИГ. 8 представлен вид в перспективе картриджа резервуара для лекарственных средств в соответствии с инфузионной помпой, показанной на ФИГ. 7, включая адаптер для размещения люэровского соединителя.
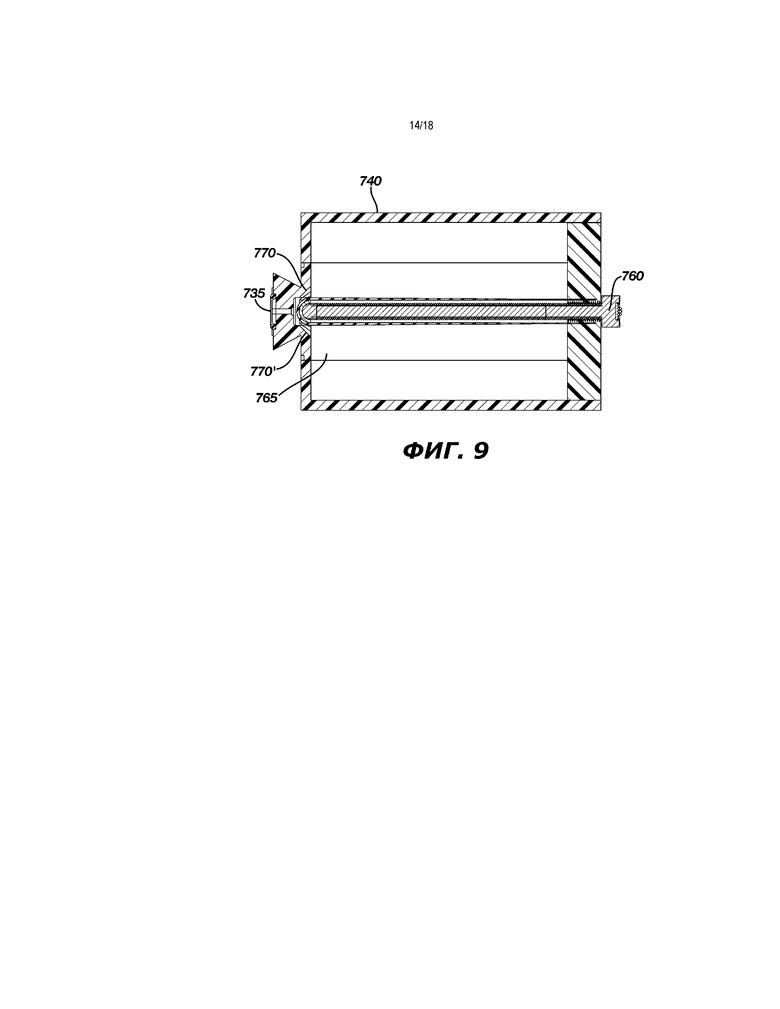
На ФИГ. 9 представлен вид в поперечном сечении компонента, выполненного с возможностью вставки и прикрепленного к адаптеру для размещения люэровского соединителя.
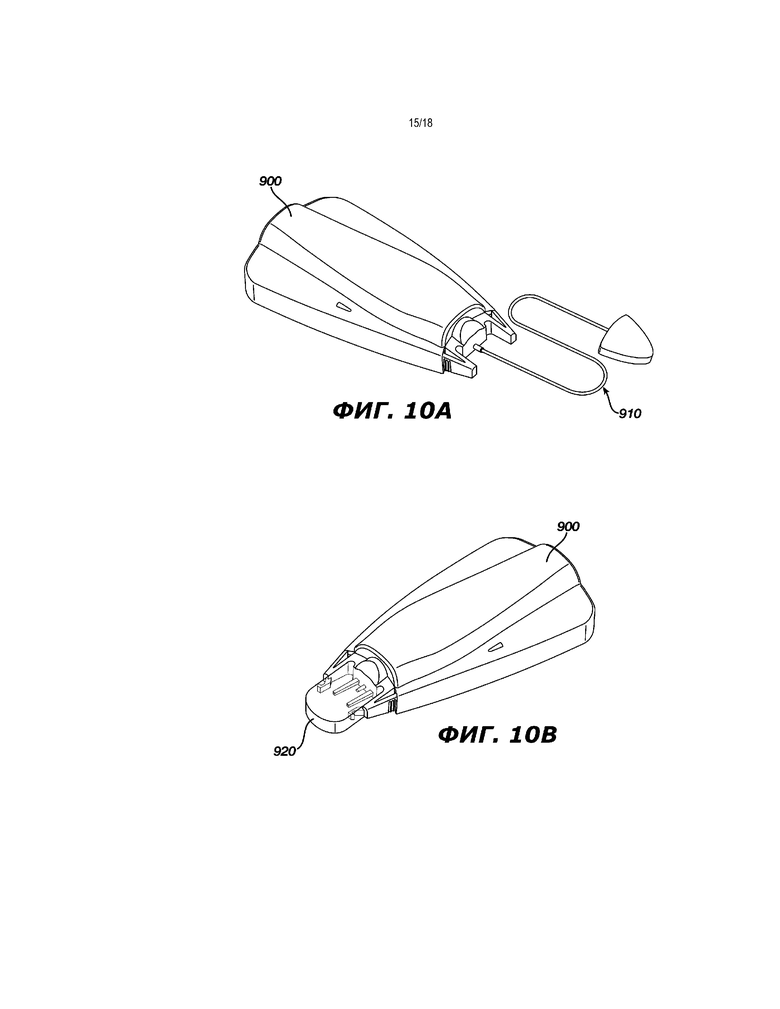
На ФИГ. 10A и 10B показана инфузионная помпа в соответствии с вариантом осуществления настоящего изобретения, приспособленная для трубочного (ФИГ. 10A) и беструбочного (ФИГ. 10B) размещения.
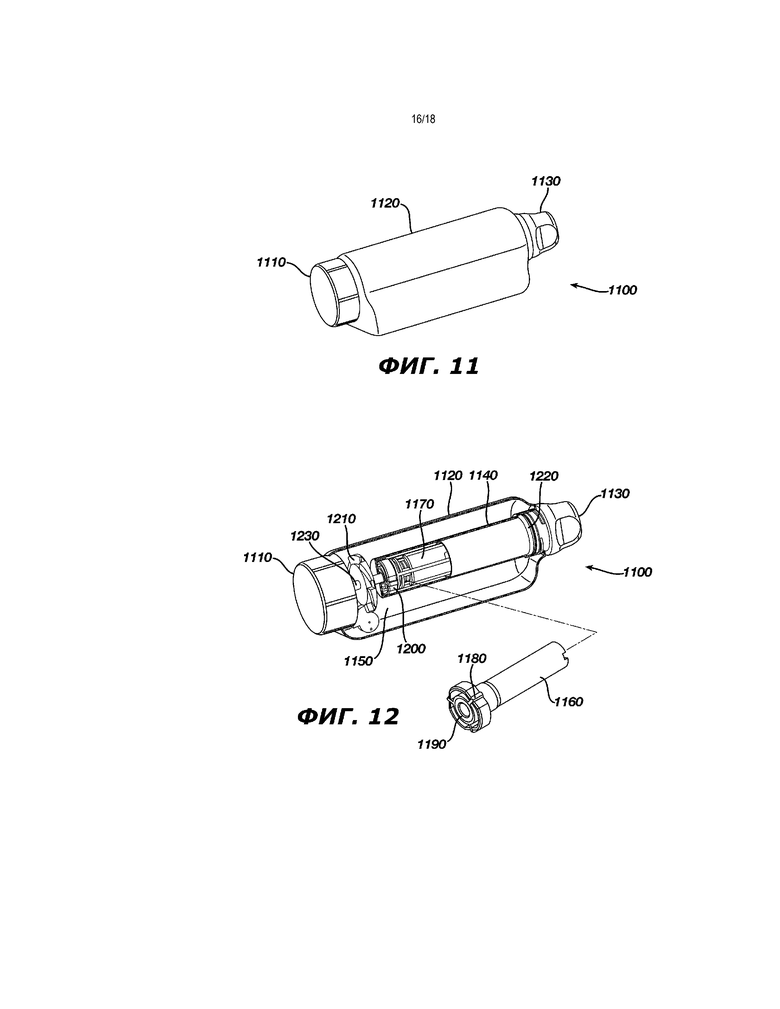
На ФИГ. 11 в перспективе показан вариант осуществления корпуса в соответствии с вариантом осуществления настоящего изобретения.
На ФИГ. 12 частично в поперечном сечении и с пространственным разделением компонентов узла толкателя показан вариант осуществления устройства для инфузии в соответствии с вариантом осуществления настоящего изобретения.
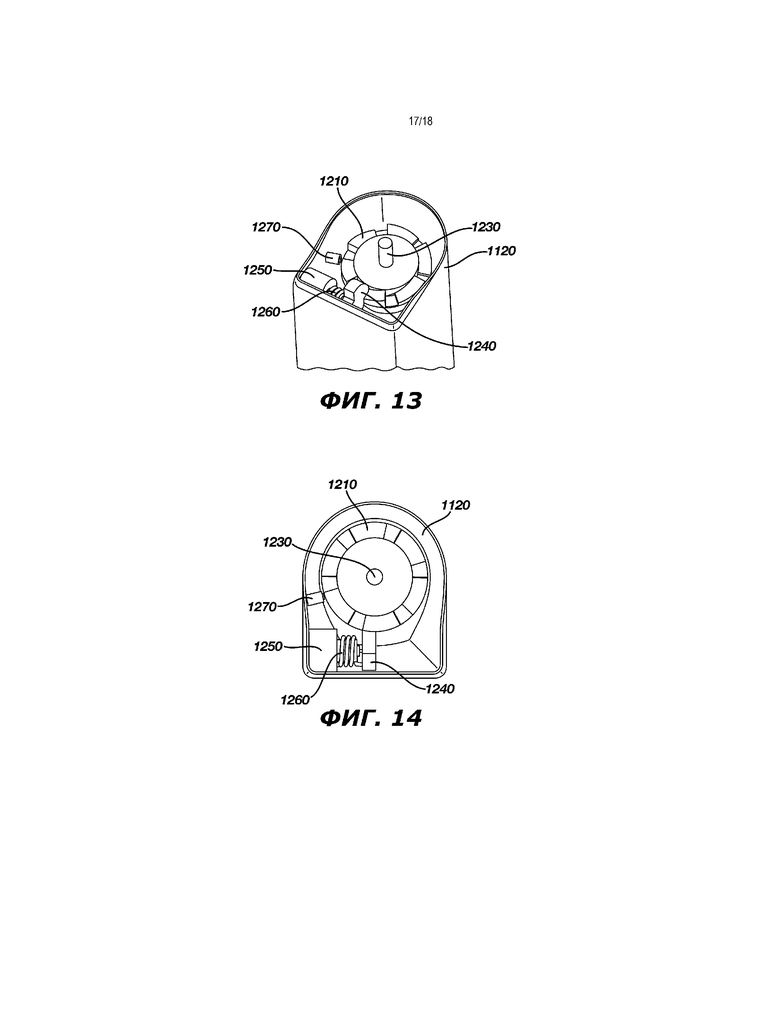
На ФИГ. 13 в перспективе и частично в поперечном сечении представлен конец устройства для инфузии, где показаны ведущая шестерня и храповой выступ в соответствии с вариантом осуществления настоящего изобретения.
На ФИГ. 14 в поперечном сечении показан конец устройства для инфузии, где показаны ведущая шестерня и храповой выступ в соответствии с вариантом осуществления настоящего изобретения.
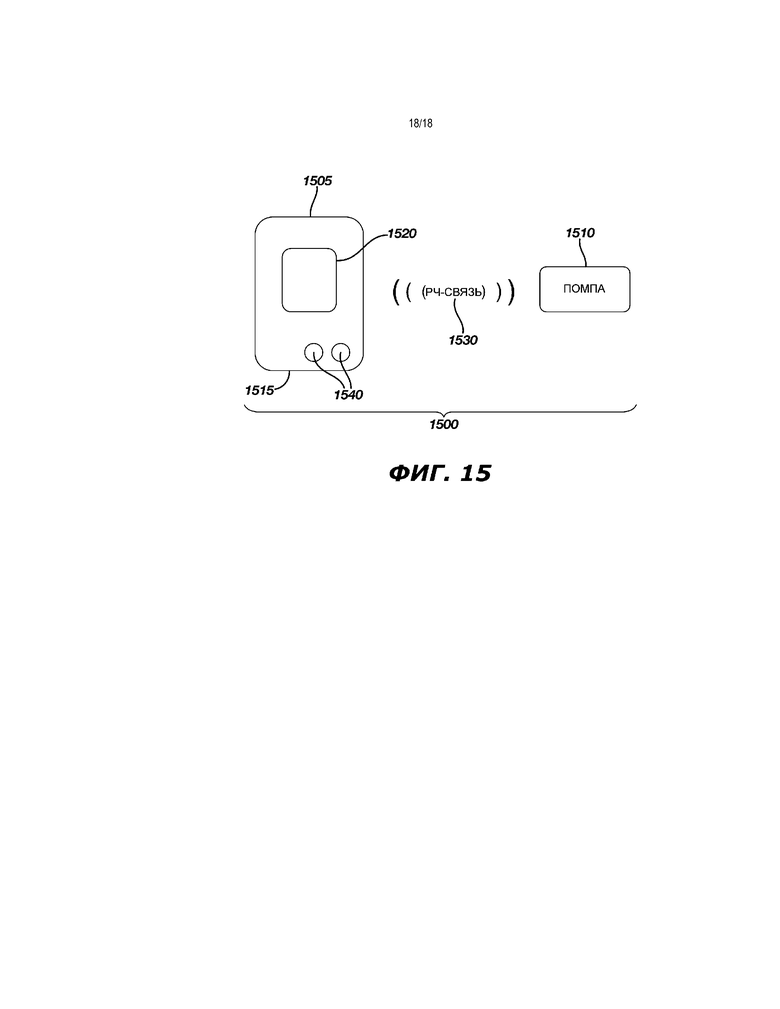
На ФИГ. 15 показано устройство удаленного управления, выполненное с возможностью управления инфузионной помпой в соответствии с вариантом осуществления изобретения посредством радиочастотной телеметрии.
ПОДРОБНОЕ ОПИСАНИЕ НАГЛЯДНЫХ ПРИМЕРОВ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На ФИГ. 1A–3 показан приводной механизм 100 инфузионной помпы в соответствии с примером осуществления настоящего изобретения. Имеющий по существу цилиндрическую форму приводной механизм 100 включает в себя проксимальный конец 102, дистальный конец 104 и объединенные двигатель и редуктор (далее именуемые «двигатель 106»), функционально связанные с ходовым винтом 108, выполненным с возможностью зацепления с поршнем 110. Проксимальный конец 102 приводного механизма 100 согласованно соединен (т. е. имеет «плавающее» соединение) с внутренней поверхностью (не показана) корпуса устройства для доставки лекарственных средств, такого как, например, инсулиновая помпа. Согласованное соединение позволяет корпусу двигателя слегка поворачиваться в ответ на высокий крутящий момент двигателя во время запуска двигателя. Дистальный конец 104 приводного механизма 100 выполнен с возможностью зацепления с плунжером 111, выполненным с возможностью вставки скольжением в резервуар 112 для лекарственных средств (или картридж) устройства для доставки лекарственных средств. Приводной механизм 100 выставлен соосно или «линейно» с осью перемещения плунжера 111. Варианты осуществления устройств для доставки лекарственных средств, которые могут применяться с примерами осуществления настоящего изобретения, показаны на ФИГ. 4A и 4B.
Поршень 110 включает в себя полость 113 для размещения двигателя 106 и ходового винта 108, так что ходовой винт 108 и, по меньшей мере, часть двигателя 106 по существу содержатся в пределах полости 113 поршня при нахождении поршня 110 в оттянутом положении. По меньшей мере, часть двигателя 106 также по существу содержится в пределах полости 114 ходового винта 108 независимо от того, в каком положении, оттянутом или выдвинутом, находится поршень 110. В этом варианте осуществления длина двигателя 106 больше, чем диаметр двигателя 106. Длина двигателя 106 составляет от приблизительно 20 миллиметров до приблизительно 30 миллиметров, и диаметр двигателя составляет от приблизительно 5 миллиметров до приблизительно 10 миллиметров. Такая конфигурация поршня 110, ходового винта 108 и двигателя 106 обеспечивает более компактный размер устройства для доставки лекарственных средств, чем традиционные конфигурации двигателя с размещением параллельно оси перемещения плунжера.
Внешняя поверхность 116 поршня 110 дополнительно включает в себя шпоночный элемент 118, сопрягающийся с пазом (не показан) на внутренней поверхности корпуса устройства для доставки лекарственных средств. Шпоночный элемент 118 препятствует повороту поршня 110 во время применения приводного механизма 100 таким образом, что поршень 110 перемещается только в осевом направлении A.
Двигатель 106 связан с и приводит в действие приводной вал 120, который посредством втулки связан с внутренней поверхностью 124 первого конца 126 ходового винта 108. Двигатель 106 располагается внутри и прикреплен к монтажной гильзе 128 двигателя при помощи, по меньшей мере, одного установочного штифта 130. Монтажная гильза 128 двигателя препятствует повороту двигателя 106 при его креплении шпонкой (не показана) на опорной плите 132, которая закреплена на внутренней поверхности устройства для доставки лекарственных средств. Опорная плита 132 радиально окружает монтажную гильзу 128 двигателя рядом с проксимальным концом 134 монтажной гильзы 128 двигателя. Множество линейных подшипников 136 между монтажной гильзой 128 двигателя и опорной плитой 132 позволяют монтажной гильзе 128 двигателя «плавать» в осевом направлении таким образом, что датчик усилия 138 может определять нагрузку на двигатель 106, например, при закупорке инфузионной линии, доставляющей лекарственное средство из резервуара для лекарственных средств. Датчик усилия 138 соединен с контактом 140 датчика усилия на проксимальном конце 134 монтажной гильзы 128 двигателя.
Ходовой винт 108 включает в себя внешнюю резьбу 142, которая сопрягается с внутренней резьбой 144 поршня 110. Радиальные подшипники 146, обеспечивающие радиальное перемещение ходового винта 108, могут находиться в пространстве 148 между вторым концом 150 ходового винта 108 и внешней поверхностью 152 монтажной гильзы 128 двигателя.
В процессе применения крутящий момент, вырабатываемый двигателем 106, передается приводному валу 120, который затем поворачивает ходовой винт 108. При повороте ходового винта 108 внешняя резьба 142 ходового винта 108 вступает в зацепление с внутренней резьбой 144 поршня 110, заставляя поршень 110 перемещаться в осевом направлении A из оттянутого положения (см. ФИГ. 1B) в выдвинутое положение (см. ФИГ. 3). При перемещении поршня 110 из оттянутого положения в выдвинутое положение дистальный конец поршня 110 вступает в зацепление с плунжером 111 (см. ФИГ. 2), обеспечивая доставку лекарственного средства из резервуара или картриджа для лекарственных средств.
Как показано на ФИГ. 4A и 4B, каждое из устройств 300 и 400 для доставки лекарственных средств, которые могут применяться с вариантами осуществления настоящего изобретения, включает в себя корпус 302 и 402 соответственно, дисплей 404 (не показан на устройстве 300) для предоставления пользователю оперативной информации, множество навигационных кнопок 306 и 406 для ввода информации пользователем, батарею (не показана) в батарейном отсеке для обеспечения питания устройств 300 и 400 для доставки лекарственных средств, электронику для обработки сигналов (не показана), приводной механизм 100 для проталкивания лекарственного средства из резервуара для лекарственных средств через боковой порт 308 и 408, связанный с инфузионным набором (не показан) в организм пользователя.
На ФИГ. 5A–5C показан другой вариант осуществления настоящего изобретения. Приводной механизм 500 имеет цилиндрическую форму и включает в себя проксимальный конец 502, дистальный конец 504 и двигатель 506, функционально связанный с ходовым винтом 508, выполненным с возможностью зацепления с поршнем 510. Проксимальный конец 502 приводного механизма 500 согласованно соединен с внутренней поверхностью (не показана) корпуса устройства для доставки лекарственных средств. Дистальный конец 504 приводного механизма 500 выполнен с возможностью зацепления с плунжером 511, выполненным с возможностью вставки скольжением в резервуар для лекарственных средств устройства для доставки лекарственных средств. Приводной механизм 500 выставлен соосно или «линейно» с осью перемещения плунжера.
Поршень 510 включает в себя полость 512 для размещения двигателя 506 и ходового винта 508, так что ходовой винт 508 и двигатель 506 по существу содержатся в пределах полости 512 поршня при нахождении поршня 510 в оттянутом положении. В этом варианте осуществления поршень 510 и ходовой винт 508 имеют «телескопическую» конфигурацию, как будет подробно описано ниже. Поршень 510 включает в себя колпачок 513, первый элемент 514 и второй элемент 516. Колпачок 513 прикреплен к первому элементу 514. По меньшей мере, одна шпонка 517 на внутренней поверхности 519 первого элемента 514 сопрягается, по меньшей мере, с одной канавкой (не показана) на внешней поверхности второго элемента 516. По меньшей мере, одна шпонка 517 препятствует радиальному перемещению первого элемента 514 таким образом, что первый элемент 514 перемещается только в осевом направлении A’. Второй элемент 516, по меньшей мере, частично вставлен скольжением в первый элемент 514 и включает в себя внутреннюю резьбу 544, сопрягающуюся с внешней резьбой 542 на ходовом винте 508. Второй элемент 516 включает в себя шпоночный элемент 518 (например, фланец) на проксимальном конце, сопрягающийся с пазом (не показан) на внутренней поверхности корпуса устройства для доставки лекарственных средств. Шпоночный элемент 518 препятствует повороту второго элемента таким образом, что второй элемент перемещается только в осевом направлении A’.
В этом варианте осуществления приводного механизма 500 двигатель 506 представляет собой «плоский» двигатель, диаметр которого превышает длину. Длина двигателя составляет от приблизительно 2 миллиметров до приблизительно 12 миллиметров, и диаметр двигателя составляет от приблизительно 10 миллиметров до приблизительно 15 миллиметров. Такая конфигурация поршня 510, ходового винта 508 и двигателя 506 обеспечивает более компактный размер устройства для доставки лекарственных средств, чем традиционные конфигурации двигателя с размещением параллельно оси перемещения плунжера.
Двигатель 506 приводит в действие приводной вал 520, который соединен с приводной гайкой 522. Двигатель 506 располагается внутри и прикреплен к монтажной гильзе 528 двигателя. Монтажная гильза 528 двигателя препятствует повороту двигателя 506 при его креплении шпонкой (не показана) на опорной плите 532, которая закреплена на внутренней поверхности устройства для доставки лекарственных средств. Опорная плита 532 встроена в монтажную гильзу 528 двигателя рядом с проксимальным концом 534 монтажной гильзы 528 двигателя. Множество линейных подшипников 536 между монтажной гильзой 528 двигателя и опорной плитой 532 позволяют монтажной гильзе 528 двигателя «плавать» в осевом направлении таким образом, что датчик усилия 538 может определять нагрузку на двигатель 506, например, при закупорке инфузионной линии, доставляющей лекарственное средство из резервуара для лекарственных средств. Датчик усилия 538 соединен с контактом 540 датчика усилия на проксимальном конце двигателя 506.
Дистальный конец 535 монтажной гильзы 528 двигателя размещается смежно со вторым концом 550 ходового винта 508 при расположении поршня 510 в оттянутом положении. Для соединения приводного вала 520 с приводной гайкой 522 приводной вал 520 проходит через отверстие 552 в дистальном конце 535 монтажной гильзы 528 двигателя. Первое динамическое радиальное уплотнение 554 размещается между приводным валом 520 и монтажной гильзой 528 двигателя, препятствуя контакту двигателя 506 с текучей средой. Первое динамическое радиальное уплотнение 554 обеспечивает осевое перемещение монтажной гильзы 528 двигателя для измерения усилия. Статическое радиальное уплотнение 554 может быть образовано из материала с малым трением, такого как, например, Teflon. В варианте осуществления, показанном на ФИГ. 5A и 5B, приводная гайка 522 охватывает продольное расстояние от первого конца 526 до второго конца 550 в полости 556 ходового винта. В альтернативном варианте осуществления приводная гайка 522 охватывает часть расстояния от первого конца 526 до второго конца 550 в пределах полости 556 ходового винта, и длина приводного вала 520 соответственно увеличивается.
Динамическое радиальное уплотнение 558 могут также размещать между опорной плитой 532 и монтажной гильзой 528 двигателя для предотвращения контакта двигателя 506 с текучей средой. Динамическое радиальное уплотнение 558 обеспечивает осевое перемещение монтажной гильзы 528 двигателя для измерения усилия. Динамическое радиальное уплотнение 558 может быть выполнено из материала с малым трением, такого как, например, Teflon.
Приводная гайка 522 включает в себя внешнюю резьбу 560, которая сопрягается с внутренней резьбой 562 ходового винта 508. Ходовой винт 508 также включает в себя внешнюю резьбу 542, которая сопрягается с внутренней резьбой 544 второго элемента 516 поршня 510. Радиальные подшипники 546 могут находиться в пространстве 548 между первым концом 526 ходового винта 508 и внутренней поверхностью первого элемента 514 поршня 510, обеспечивая возможность поворота ходового винта 508.
В процессе применения крутящий момент, вырабатываемый двигателем 506, передается приводному валу 520, который затем поворачивает ходовой винт 508. При повороте ходового винта 508 внешняя резьба 560 приводной гайки 522 вступает в зацепление с внутренней резьбой 562 ходового винта 508 таким образом, что ходовой винт 508 перемещается на первое расстояние B1 в осевом направлении до вступления первого ограничителя 564 на приводной гайке 522 в зацепление с внутренней поверхностью второго конца 550 ходового винта 508, как показано на ФИГ. 5B. Поскольку внешняя резьба 542 рядом со вторым концом 550 ходового винта 508 зацепляется с внутренней резьбой 544 второго элемента 516 поршня 510 и поршень 510 может перемещаться только в осевом направлении, поршень 510 также перемещается на первое расстояние B1. Затем внешняя резьба 542 ходового винта 508 вступает в зацепление с внутренней резьбой 544 второго элемента 516 поршня 510, заставляя поршень 510 перемещаться на второе расстояние B2 в осевом направлении до вступления в зацепление со вторым ограничителем 566 на внешней поверхности ходового винта 508, как показано на ФИГ. 5C. Таким образом, поршень 510 перемещается из оттянутого положения (см. ФИГ. 5A) в полностью выдвинутое (или разложенное) положение (см. ФИГ. 5C). При перемещении поршня 510 из оттянутого положения в выдвинутое положение дистальный конец поршня 510 вступает в зацепление с плунжером 511, обеспечивая доставку лекарственного средства из резервуара или картриджа для лекарственных средств. Поскольку внутренняя и внешняя резьба на компонентах в приводном механизме 500 имеет одинаковый шаг, порядок, в котором компоненты перемещаются в осевом направлении, не влияет на работу приводного механизма 500.
На ФИГ. 6A–6C показан еще один вариант осуществления настоящего изобретения. Приводной механизм 600 имеет цилиндрическую форму и включает в себя проксимальный конец 602, дистальный конец 604 и двигатель 606, функционально связанный с ходовым винтом 608, выполненным с возможностью зацепления с поршнем 610. Проксимальный конец 602 приводного механизма 600 согласованно соединен с внутренней поверхностью (не показана) корпуса устройства для доставки лекарственных средств. Дистальный конец 604 приводного механизма 600 выполнен с возможностью зацепления с плунжером (не показан), выполненным с возможностью вставки скольжением в резервуар для лекарственных средств устройства для доставки лекарственных средств. Приводной механизм 600 выставлен соосно или «линейно» с осью перемещения плунжера.
Поршень 610 включает в себя полость 612 для размещения двигателя 606 и ходового винта 608, так что ходовой винт 608 и двигатель 606 по существу содержатся в пределах полости 612 поршня при нахождении поршня 610 в оттянутом положении. В этом варианте осуществления поршень 610 и ходовой винт 608 имеют «телескопическую» конфигурацию, как будет подробно описано ниже. Поршень 610 включает в себя внутреннюю резьбу 644 рядом с проксимальным концом, которая сопрягается с внешней резьбой 642 на ходовом винте 608. Поршень 610 дополнительно включает в себя шпоночный элемент (не показан) на внешней поверхности проксимального конца, сопрягающийся с пазом (не показан) на внутренней поверхности корпуса устройства для доставки лекарственных средств. Шпоночный элемент препятствует повороту поршня 610 таким образом, что поршень 610 перемещается только в осевом направлении A’’.
В этом варианте осуществления двигатель 606 представляет собой «плоский» двигатель, диаметр которого превышает длину. Длина двигателя 606 составляет от приблизительно 2 миллиметров до приблизительно 12 миллиметров, и диаметр двигателя 606 составляет от приблизительно 10 миллиметров до приблизительно 15 миллиметров. Такая конфигурация поршня 610, ходового винта 608 и двигателя 606 обеспечивает более компактный размер устройства для доставки лекарственных средств, чем традиционные конфигурации двигателя с размещением параллельно оси перемещения плунжера.
Двигатель 606 связан с и приводит в действие приводной вал 620. Приводной вал 620 связан приводной гайкой 622 с внутренней поверхностью 624 первого конца 626 ходового винта 608. Двигатель 606 размещается в пределах монтажной гильзы 628 двигателя, которая препятствует повороту двигателя 606 при фиксации (не показано) к внутренней поверхности устройства для доставки лекарственных средств. Множество линейных подшипников 636, расположенных между двигателем 606 и монтажной гильзой 628 двигателя, позволяют двигателю 606 «плавать» в осевом направлении таким образом, что датчик усилия 638 может определять нагрузку на двигатель 606, например, при закупорке инфузионной линии, доставляющей лекарственное средство из резервуара для лекарственных средств. Датчик усилия 638 соединен с контактом 640 датчика усилия на проксимальном конце двигателя 606. Пружина 641 необязательно может размещаться между двигателем 606 и корпусом устройства для доставки лекарственных средств таким образом, что двигатель 606 смещен от датчика усилия 638.
Дистальный конец 635 монтажной гильзы 628 двигателя размещается смежно со вторым концом 646 приводной гайки 622 при расположении поршня 610 в оттянутом положении. Для соединения приводного вала 620 с приводной гайкой 622 приводной вал 620 проходит через отверстие 652 в дистальном конце монтажной гильзы 628 двигателя. Динамическое радиальное уплотнение 658 размещается между приводным валом 620 и монтажной гильзой 628 двигателя, препятствуя контакту двигателя 606 с текучей средой. Динамическое радиальное уплотнение 658 обеспечивает осевое перемещение монтажной гильзы 628 двигателя для измерения усилия. Динамическое радиальное уплотнение 658 выполнено из материала с малым трением, такого как, например, Teflon.
Приводная гайка 622 включает в себя внешнюю резьбу 660, которая сопрягается с внутренней резьбой 662 ходового винта 608. В процессе применения крутящий момент, вырабатываемый двигателем 606, передается приводному валу 620, который затем поворачивает ходовой винт 608. При повороте ходового винта 608 внешняя резьба 660 приводной гайки 622 вступает в зацепление с внутренней резьбой 662 рядом с первым концом 626 ходового винта 608 таким образом, что ходовой винт 608 перемещается на первое расстояние C1 в осевом направлении до вступления поверхности 645 на проксимальном конце ходового винта 608 в зацепление со вторым концом 646 приводной гайки 622, как показано на ФИГ. 6B. Поскольку внешняя резьба 642 рядом со вторым концом 650 ходового винта 608 зацепляется с внутренней резьбой 644 поршня 610 и поршень 610 может перемещаться только в осевом направлении, поршень 610 также перемещается на первое расстояние C1 в осевом направлении. Затем внешняя резьба 642 рядом со вторым концом 650 ходового винта 608 вступает в зацепление с внутренней резьбой 644 рядом с проксимальным концом поршня 610, заставляя поршень 610 перемещаться на второе расстояние C2 в осевом направлении до вступления в зацепление с ограничителем 666 на внешней поверхности ходового винта 608, как показано на ФИГ. 6C. Таким образом, поршень 610 перемещается из оттянутого положения (см. ФИГ. 6A) в полностью выдвинутое (или разложенное) положение (см. ФИГ. 6C). При перемещении поршня 610 из оттянутого положения в выдвинутое положение дистальный конец поршня 610 вступает в зацепление с плунжером, обеспечивая доставку лекарственного средства из резервуара или картриджа для лекарственных средств. Поскольку внутренняя и внешняя резьба на компонентах в приводном механизме 600 имеет одинаковый шаг, порядок, в котором компоненты перемещаются в осевом направлении, не влияет на работу приводного механизма 600.
Преимущество телескопической конфигурации, показанной на ФИГ. 6A–6C, состоит в том, что длину поршня 610 можно уменьшить приблизительно на 40% (или расстояние C1 на ФИГ. 6A) в отличие от нетелескопических конфигураций, что обеспечивает более компактный размер устройства для доставки лекарственных средств.
Двигатели, показанные на ФИГ. 1–6B, необязательно могут включать энкодер (не показан), который в сочетании с электроникой устройства для доставки лекарственных средств может отслеживать число оборотов двигателя. Затем число оборотов двигателя могут применять для точного определения положения поршня, таким образом обеспечивая информацию о количестве текучей среды, высвобожденной из резервуара для лекарственных средств.
На ФИГ. 7 показано устройство для инфузии в соответствии с настоящим изобретением с применением линейного приводного механизма. Этот вариант осуществления относится к линейной инфузионной помпе с адаптером, позволяющим использовать его в качестве гибридного устройства, как трубочного, так и беструбочного. Многие инсулиновые помпы требуют применения инфузионного набора, прикрепляющего резервуар или картридж в пределах помпы для доставки лекарственного средства под кожу. В качестве примера можно привести инфузионный набор, описанный в патенте США № 6,572,586, содержание которого полностью включено в данный документ путем ссылки.
Для некоторых пациентов может быть предпочтительно, чтобы инфузионная помпа размещалась дистанционно от места инфузии, где канюля инфузионного набора вводится под кожу. Для таких пациентов предпочтительно применять раскрытую здесь инфузионную систему с инфузионным набором. Другие, однако, предпочитают избегать применения инфузионного набора и делают выбор в пользу инфузионной патч-помпы (т. е. беструбочной). Применение инфузионной помпы такого типа позволяет исключить использование инфузионного набора, и канюля, вводимая под кожу пользователя, выступает непосредственно из картриджа или резервуара инфузионной помпы. Пример пригодного для ношения устройства беструбочной инфузионной патч-помпы описан в патенте США № 8,109,912, содержание которого полностью включено в данный документ путем ссылки.
Устройство 700 для инфузии включает в себя корпус 715, содержащий внутри себя линейный приводной механизм и картридж, резервуар, эластичный баллон или иную конструкцию для хранения лекарственных средств. Корпус 715 включает в себя гибкие крылья 720, 720’, прикрепленные к корпусу, но выполненные из мягкого пластичного материала, такого как силиконовый каучук, который позволяет устройству повторять положение тела пациента в месте ношения устройства 700. Устройство 700 адгезивно прикреплено к телу пациента при помощи адгезивного пластыря 705, который может быть прикреплен к корпусу 715 посредством ультразвуковой сварки, лазерной сварки, химических связывающих веществ и т. п.
Поскольку устройства в соответствии с данным вариантом осуществления изобретения обычно используют люди, страдающие диабетом 1 типа, при котором устройство выполнено с возможностью доставки базального инсулина, конструкция, позволяющая надежно и комфортно адгезивно прикрепить устройство к телу пациента, независимо от его размеров (как для детей, так и для взрослых), является эффективной. Применение гибких крыльев 720, 720’ с обеих сторон устройства 700 позволяет устройству 700 более плотно прилегать к телу, повторяя его контуры и снижая давление в месте прикрепления адгезивного пластыря 705. Это снижает вероятность случайного смещения патч-помпы у пациента при выполнении физических упражнений, повседневной деятельности (ходьба, выполнение работы по дому и т. п.), во время движений во сне и т. п. Пациенты могут также оценить, что корпус 715 полугибкой конфигурации является более комфортным, поскольку вероятность того, что острые края будут выступать, вызывая раздражение или причиняя дискомфорт, предельно снижена.
Показанное устройство 700 для инфузии также обладает способностью функционировать как трубочная помпа, то есть инфузионный набор соединяет выходной порт 725 для текучей среды на помпе 700 с канюлей, введенной под кожу пациента в удаленном месте. Альтернативно, устройство 700 может функционировать как беструбочная помпа, в которой канюля непосредственно соединена с выходным портом 725 устройства для текучей среды и введена под кожу пациента в месте, близком к месту на теле пациента, в котором устройство 700 адгезивно прикреплено при помощи адгезивного пластыря 705.
Устройство 700 включает в себя приемный механизм 710 для размещения инфузионного набора или канюли, включающий в себя нажимные язычки 750, 750’, которые применяются для отклонения захватных язычков 730, 730’, прикрепляемых с возможностью высвобождения к инфузионному набору или канюле, как показано на ФИГ. 10A, 10B. Направляющие язычки 735, 735’ помогают установить адаптер 920 канюли (ФИГ. 10B) для обеспечения соединения канюли с выходным портом 725 для текучей среды. Как показано на ФИГ. 10A, корпус гибридной помпы с гибкими крыльями 900 прикреплен к инфузионному набору 910. На ФИГ. 10B корпус гибридной помпы с гибкими крыльями 900 прикреплен к адаптеру 920 канюли.
Как дополнительно показано на ФИГ. 8, приемный механизм 710 также может включать в себя фиксирующие язычки 760, выполненные с возможностью закрепления приемный механизма 710 на корпусе 715 с возможностью высвобождения. В варианте осуществления, показанном на ФИГ. 8, приемный механизм 710 прикреплен к вставке 740 корпуса. Вставка 740 корпуса, как показано на ФИГ. 9, может включать в себя линейный приводной механизм 760 или механизм накачки текучей среды другого типа, такой как перистальтический насос, микроэлектрический механический насос (MEMS), или другую приводную систему, известную в этой области техники. Кроме того, вставка корпуса может включать в себя резервуар 765 для лекарственных средств, имеющий каналы 770, 770’ для текучей среды, сообщающиеся с выходным портом 725 для текучей среды. В одном варианте осуществления участок резервуара 765 корпуса содержит эластичный баллон, располагающийся в пределах между гибкими крыльями 720, 720’. Альтернативно, вставка 740 корпуса может содержать приводной механизм 760 для текучей среды, и в пределах полостей гибких крыльев 720, 720’ может быть образован резервуар.
На ФИГ. 11–14 показана помпа для болюсного введения, обеспечивающая доставку инсулина посредством механического привода, управляемого пациентом. В отличие от остальных чисто механических помп эта система включает в себя небольшое количество электронных средств для обеспечения радиочастотной связи и средств блокировки механизма доставки. В этом варианте осуществления помпа не имеет дисплея или кнопок управления. Эта помпа выполнена с возможностью управления посредством удаленного контроллера, как показано по существу на ФИГ. 15, который может включать в себя SMBG (самоконтроль глюкозы в крови), помогающий пациентам, страдающим диабетом, определить необходимую дозу, например, инсулина. Удаленные контроллеры, подходящие для применения в соответствии с данным вариантом осуществления изобретения, более полно описаны в патентах США 8,449,523 и 8,444,595, содержание которых полностью включено в данный документ путем ссылки.
В соответствии с данным вариантом осуществления настоящего изобретения, когда пациенту необходим болюс инсулина, он вводит количество в удаленный контроллер 1505 (ФИГ. 15) при помощи клавиш ввода 1540. Количество может быть подтверждено на дисплее 1520 на корпусе 1515 удаленного контроллера 1505. Удаленный контроллер 1505, соединенный с помпой 1510 посредством радиочастотной связи 1530, образует инфузионную систему 1500 с удаленным управлением. Удаленный контроллер 1505 посредством РЧ-связи 1530 (радиочастотной связи) посылает помпе 1510 сообщение, содержащее команду, согласно которой помпа разблокирует механический приводной механизм. Несмотря на то что РЧ-связь широко применяется в промышленности, для беспроводной телеметрии могут применяться Bluetooth®, инфракрасный (ИК) сигнал и другие способы и протоколы связи.
Затем пациент поворачивает круговую шкалу на требуемое количество щелчков для доставки требуемого количества лекарственного средства. Поворотное перемещение круговой шкалы преобразуется в линейное перемещение, приводящее в действие плунжер в пределах стандартного цилиндрического картриджа, например, один щелчок круговой шкалы соответствует одной единице инсулина. Помпа считает количество щелчков, обеспечивая доставку соответствующего количества лекарственного средства. После достижения требуемого количества включается блокирующий механизм, препятствующий дальнейшей доставке лекарственного средства. Если пациент нуждается в большем количестве лекарственного средства, ему необходимо ввести его удаленно. Если пациент не закончил доставку в пределах заданного количества времени, на устройстве удаленного управления отображается предупреждение.
Вариант осуществления настоящего изобретения показан на ФИГ. 11, на котором медицинское инфузионное устройство 1100 для болюсного введения имеет корпус 1120. Концевой колпачок 1130, размещенный на дистальном конце корпуса 1120, закрепляет картридж, содержащий лекарственное средство, в пределах корпуса 1120. Круговая шкала 1110, размещенная на проксимальном конце корпуса 1120, позволяет пациенту, пользователю или медицинскому работнику вручную установить размер вводимого болюса.
На ФИГ. 12 показан корпус 1120 с традиционным цилиндрическим картриджем 1140 для лекарственных средств, расположенным в пределах корпуса 1120. Картридж для лекарственных средств может включать в себя уплотняющий элемент 1220, такой как резиновое кольцо, на дистальном конце корпуса для предельного снижения или исключения проникновения воды, влаги, текучей среды или загрязняющих веществ в корпус 1120. Колпачок 1130 картриджа может быть прикреплен к корпусу 1120 с возможностью удаления, надежно удерживая картридж 1140 в нем. Альтернативные колпачки картриджей более полно описаны в патенте США 8,361,050, содержание которого полностью включено в данный документ путем ссылки.
Картридж 1140 включает в себя плунжер 1170, вставленный внутрь цилиндрического отверстия картриджа 1140, для вытеснения текучей среды из картриджа 1140 при продвижении плунжера 1170. Для продвижения плунжера 1170 шток 1160 толкателя смещается к плунжеру 1170. Шток 1160 толкателя включает в себя резьбовую втулку 1190 и направляющие 1180, предотвращающие поворот. Двигатель 1200 выталкивает резьбовую ось (не показана) в резьбовую втулку 1190. Таким образом, когда двигатель 1200 заставляет резьбовую ось поворачиваться, резьбовая втулка 1190 проходит по резьбе резьбовой оси, при этом резьбовая втулка 1190 заставляет шток 1160 толкателя перемещаться линейно и смещаться к плунжеру 1170 для вытеснения текучей среды из картриджа 1140.
Для определения размера вводимого болюса лекарственного средства устройство 1100 для инфузии включает в себя круговую шкалу 1110. При повороте круговой шкалы 1110 управляющая ось 1230, зависимая от круговой шкалы 1110 и связанная с ведущей шестерней 1210, поворачивает ведущую шестерню 1210. Как показано на ФИГ. 13, храповой выступ 1240 вступает в зацепление с ведущей шестерней 1210, при этом каждый раз, когда храповой выступ 1240 преодолевает наклонный зубец ведущей шестерни 1210, раздается слышимый щелчок. Каждый щелчок обозначает единицу измерения, такую как 1 единица, 1 мл и т. п., добавляемую к болюсу. Если пациент поворачивает круговую шкалу 1110 и при этом раздается три щелчка, размер болюса будет равен троекратной базовой единице измерения в устройстве, например 3 единицам текучей среды для доставки после активации устройства.
В корпусе 1120 предусмотрены двигатель 1250 и пружина 1260 для удерживания храпового выступа 1240. Как показано на ФИГ. 14, один или более датчиков 1270 могут размещаться вокруг ведущей шестерни 1210 для передачи блоку управления информации о точном положении ведущей шестерни в любое время.
Следует отметить, что устройство этого варианта осуществления изобретения не включает в себя кнопок управления, устройств отображения и т. п., встроенных или расположенных на корпусе 1120 устройства 1100. Вместо этого полость 1150 корпуса 1120, предусмотренная для электронной системы управления и питания, необходимого для двигателей 1250 и 1200, может включать в себя источник питания, систему телеметрии, микропроцессор или микроконтроллер.
Ручные устройства удаленного управления, совместимые с данным вариантом осуществления изобретения, были описаны ранее. В данном варианте осуществления блок удаленного управления применяется для активации доставки лекарственного средства. Как отмечалось ранее, при необходимости подачи болюса инсулина пациент должен ввести количество на устройстве удаленного управления. Это устройство посредством РЧ-связи (радиочастотной связи) посылает помпе сообщение, содержащее команду, согласно которой помпа разблокирует механический приводной механизм посредством высвобождения храпового выступа 1240 из ведущей шестерни 1210. Это позволяет ведущей шестерне 1210 поворачиваться.
В варианте осуществления, не предусматривающем двигатель 1200, после высвобождения храпового выступа 1240 пациент поворачивает круговую шкалу 1110 на требуемое количество «щелчков», заставляя ведущую шестерню 1210 вращаться. В этом варианте осуществления ведущая шестерня 1210 соединена непосредственно с резьбовым штоком (не показан). При вращении пользователем круговой шкалы 1110 поворот резьбового штока в резьбовой втулке 1190 заставляет шток 1160 толкателя перемещаться линейно и смещать плунжер 1170 в картридж 1140 для вытеснения текучей среды. После доставки запрограммированного в удаленном устройстве количества лекарственного средства пациентом вручную посредством поворота круговой шкалы 1110 на соответствующее количество щелчков контроллер вступает во взаимодействие с блокирующим механизмом, давая двигателю 1250 команду на повторное введение храпового выступа 1240 в зацепление с ведущей шестерней 1210, блокируя дальнейшую доставку лекарственного средства. Если пациент желает выполнить доставку лекарственного средства, ему необходимо ввести его удаленно. Если пациент не закончил доставку в пределах заданного количества времени, на устройстве удаленного управления отображается предупреждение и блокирующий механизм может быть запущен повторно.
После серии доставок запас лекарственного средства в картридже 1140 заканчивается. При опустошении картриджа 1140 круговую шкалу 1110 невозможно поворачивать дальше, поскольку плунжер 1170 полностью выдвинут в картридж 1140. Затем пациент перематывает приводной механизм посредством поворота круговой шкалы 1110 против часовой стрелки до тех пор, пока не достигнет начала хода. Хотя это не показано на чертежах, процесс можно упростить и ускорить посредством добавления «быстрой» гайки или «умной» гайки для обеспечения быстрого высвобождения резьбовой втулки 1190 из резьбового штока. Например, нажатие кнопки на «быстрой» гайке высвобождает резьбу и позволяет приводному механизму скользить назад быстрее, чем при многократном повороте круговой шкалы 1110 для возвращения в исходное положение.
Допускается, по меньшей мере, два варианта осуществления кнопки «быстрого высвобождения». Первый вариант - обеспечение доступа к кнопке «быстрой» гайки вдоль одной стороны устройства 1100 для инфузии. Кнопка может перемещаться в пазу, длина которого равна длине хода плунжера 1170. При необходимости выполнить перемотку пациент должен одновременно нажать кнопку и перемещать ее к круговой шкале 1110. После высвобождения кнопки происходит повторное сцепление резьбы. Во второй конфигурации кнопка высвобождения находится в центре сверху на круговой шкале 1110. Это требует более сложной механики для нажатия кнопки высвобождения на «быстрой» гайке, но упрощает защиту от попадания воды или влаги в устройство.
После завершения перемотки могут использоваться датчики 1270 для уведомления устройства удаленного управления 1505, как показано на ФИГ. 15, о том, что система находится в исходном положении. Затем система 1500 может рассчитать количество оставшегося лекарственного средства, исходя из исходного положения привода при вставке картриджа, заполненного лекарственным средством, в устройство 1000 и/или 1510 для инфузии. Корпус 1120 может быть дополнительно оснащен позиционными датчиками для обеспечения более точного позиционирования плунжера 1170 и, таким образом, большей точности в отношении количества лекарственного средства в картридже 1140. Корпус 1120 может быть оснащен смотровым окошком таким образом, чтобы пациент также мог видеть остаток инсулина.
Может быть признано, что представленные на рисунках и описанные здесь конструкции можно заменить эквивалентными конструкциями и что описанный вариант осуществления изобретения не является единственной конструкцией, которую можно использовать для осуществления заявленного изобретения. Кроме того, следует понимать, что каждая описанная выше конструкция имеет свою функцию и может упоминаться как средство выполнения этой функции. Хотя в настоящем документе представлены и описаны варианты осуществления настоящего изобретения, специалистам в данной области будет понятно, что такие варианты осуществления приведены только в качестве примера. Специалистам в данной области будут понятны многочисленные вариации, изменения и замены без отступления от сути изобретения.
Следует понимать, что при осуществлении данного изобретения можно использовать различные альтернативные варианты осуществления изобретения, описанного в настоящем документе. Предполагается, что следующие пункты формулы изобретения определяют объем изобретения, при этом способы и конструкции в рамках формулы, а также их эквиваленты охвачены формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ПРИВОДА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740731C2 |
| УЗЕЛ ПРИВОДА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2827350C2 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ВВЕДЕНИЯ ИНСУЛИНА | 2019 |
|
RU2750676C1 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2741461C2 |
| ПРИВОДНОЙ УЗЕЛ ИГЛЫ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2742499C2 |
| АКСИАЛЬНО РЕГУЛИРУЕМОЕ СОЕДИНЕНИЕ СТЕРЖНЯ ПОРШНЯ С ПОРШНЕМ ДЛЯ ПРИВОДНОГО МЕХАНИЗМА УСТРОЙСТВА ДОСТАВКИ ЛЕКАРСТВЕННОГО ВЕЩЕСТВА | 2010 |
|
RU2530661C2 |
| УЗЕЛ ПРИВОДА И РАСПОРКА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740732C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИНЪЕКЦИЙ С ИНЪЕКЦИОННЫМ КАРТРИДЖЕМ И ПРИВОДНОЙ МЕХАНИЗМ ТАКОГО УСТРОЙСТВА | 2013 |
|
RU2649473C2 |
| РАСПОРНЫЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740846C2 |
| ИНФУЗИОННАЯ СИСТЕМА И ЕЕ КОМПОНЕНТЫ | 2018 |
|
RU2757312C2 |

Изобретение относится к медицинской технике, а именно к медицинским инфузионным устройствам. Устройство содержит: корпус, имеющий проксимальный конец, дистальный конец и полость; отверстие на дистальном конце корпуса для размещения картриджа для лекарственных средств в полости, причем картридж для лекарственных средств содержит цилиндрический корпус, имеющий открытый проксимальный конец и дистальный конец, выполненный с возможностью разъемного соединения с люэровским наконечником, и плунжер, выполненный с возможностью вставки в проксимальный конец цилиндрического корпуса; шток толкателя, выполненный с возможностью смещения плунжера в цилиндрический корпус картриджа для лекарственных средств, при этом шток толкателя содержит по меньшей мере одну направляющую, предотвращающую поворот, и резьбовую втулку; резьбовую ось, выполненную так, что резьбовая ось путем ввинчивания зацепляется с резьбовой втулкой, таким образом, вызывая линейное перемещение штока толкателя при повороте резьбовой оси; ведущую шестерню, механически связанную с резьбовой осью; круговую шкалу, механически связанную с ведущей шестерней; храповой выступ, выполненный с возможностью разъемного зацепления с ведущей шестерней для предотвращения поворота ведущей шестерни, при нахождении храпового выступа в зацеплении. При этом храповой выступ выполнен с возможностью разъемного взаимодействия с медицинским инфузионным устройством посредством удаленного контроллера, с которым он связан беспроводным образом. 14 з.п. ф-лы, 15 ил.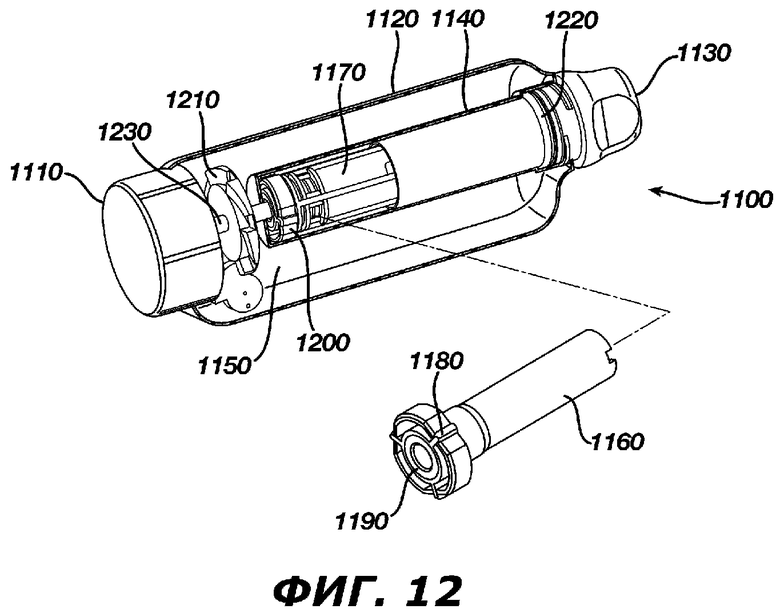
1. Медицинское инфузионное устройство, содержащее:
корпус, имеющий проксимальный конец, дистальный конец и полость;
отверстие на дистальном конце корпуса для размещения картриджа для лекарственных средств в полости, причем картридж для лекарственных средств содержит цилиндрический корпус, имеющий открытый проксимальный конец и дистальный конец, выполненный с возможностью разъемного соединения с люэровским наконечником, и плунжер, выполненный с возможностью вставки в проксимальный конец цилиндрического корпуса;
шток толкателя, выполненный с возможностью смещения плунжера в цилиндрический корпус картриджа для лекарственных средств, при этом шток толкателя содержит по меньшей мере одну направляющую, предотвращающую поворот, и резьбовую втулку;
резьбовую ось, выполненную так, что резьбовая ось путем ввинчивания зацепляется с резьбовой втулкой, таким образом вызывая линейное перемещение штока толкателя при повороте резьбовой оси;
ведущую шестерню, механически связанную с резьбовой осью;
круговую шкалу, механически связанную с ведущей шестерней;
храповой выступ, выполненный с возможностью разъемного зацепления с ведущей шестерней для предотвращения поворота ведущей шестерни, при нахождении храпового выступа в зацеплении,
при этом храповой выступ выполнен с возможностью разъемного взаимодействия с медицинским инфузионным устройством посредством удаленного контроллера, с которым он связан беспроводным образом.
2. Медицинское инфузионное устройство по п. 1, в котором храповой выступ выполнен с возможностью высвобождения от ведущей шестерни для обеспечения возможности поворота круговой шкалы.
3. Медицинское инфузионное устройство по п. 2, в котором ведущая шестерня содержит наклонные зубцы, позволяющие поворачивать круговую шкалу дискретными шагами.
4. Медицинское инфузионное устройство по п. 3, в котором каждый дискретный шаг соответствует дискретной величине линейного перемещения штока толкателя.
5. Медицинское инфузионное устройство по п. 4, содержащее двигатель и торсионную пружину в механическом соединении с храповым выступом.
6. Медицинское инфузионное устройство по п. 5, содержащее РЧ-приемник в электрическом соединении с двигателем.
7. Медицинское инфузионное устройство по п. 6, содержащее удаленный контроллер, выполненный для РЧ-связи с РЧ-приемником.
8. Медицинское инфузионное устройство по п. 7, в котором удаленный контроллер содержит устройство отображения и по меньшей мере одну клавишу ввода данных.
9. Медицинское инфузионное устройство по п. 1, содержащее один или более датчиков для определения положения по меньшей мере одного из ведущей шестерни, толкателя или плунжера.
10. Медицинское инфузионное устройство по п. 8, в котором по меньшей мере одна клавиша ввода данных на удаленном контроллере приспособлена для ввода пользователем требуемой дозировки.
11. Медицинское инфузионное устройство по п. 10, в котором контроллер выполнен с возможностью высвобождения храпового выступа в ответ на ввод требуемой дозировки на удаленном контроллере.
12. Медицинское инфузионное устройство по п. 11, в котором круговая шкала выполнена с возможностью поворота на число дискретных шагов, равное требуемой дозировке.
13. Медицинское инфузионное устройство по п. 12, в котором удаленный контроллер взаимодействует с храповым выступом после поворота круговой шкалы на число дискретных шагов, равное требуемой дозировке.
14. Медицинское инфузионное устройство по п. 13, в котором по меньшей мере один датчик выполнен с возможностью отправки РЧ-сигнала на удаленный контроллер при смещении плунжера толкателем в заданное положение в пределах картриджа для лекарственных средств.
15. Медицинское инфузионное устройство по п. 1, в котором направляющая, предотвращающая поворот, препятствует повороту штока толкателя при повороте резьбовой оси.
| US6572586 B1, 03.06.2003 | |||
| US2010069848 A1, 18.03.2010 | |||
| US2008312585 A1, 18.12.2008 | |||
| АВТОИНЪЕКТОР ИМПУЛЬСНЫЙ | 2007 |
|
RU2354413C1 |

