Изобретение относится к измерительной технике, в частности к способам измерения путевой скорости транспортных средств с использованием эффекта Доплера для электромагнитных волн.
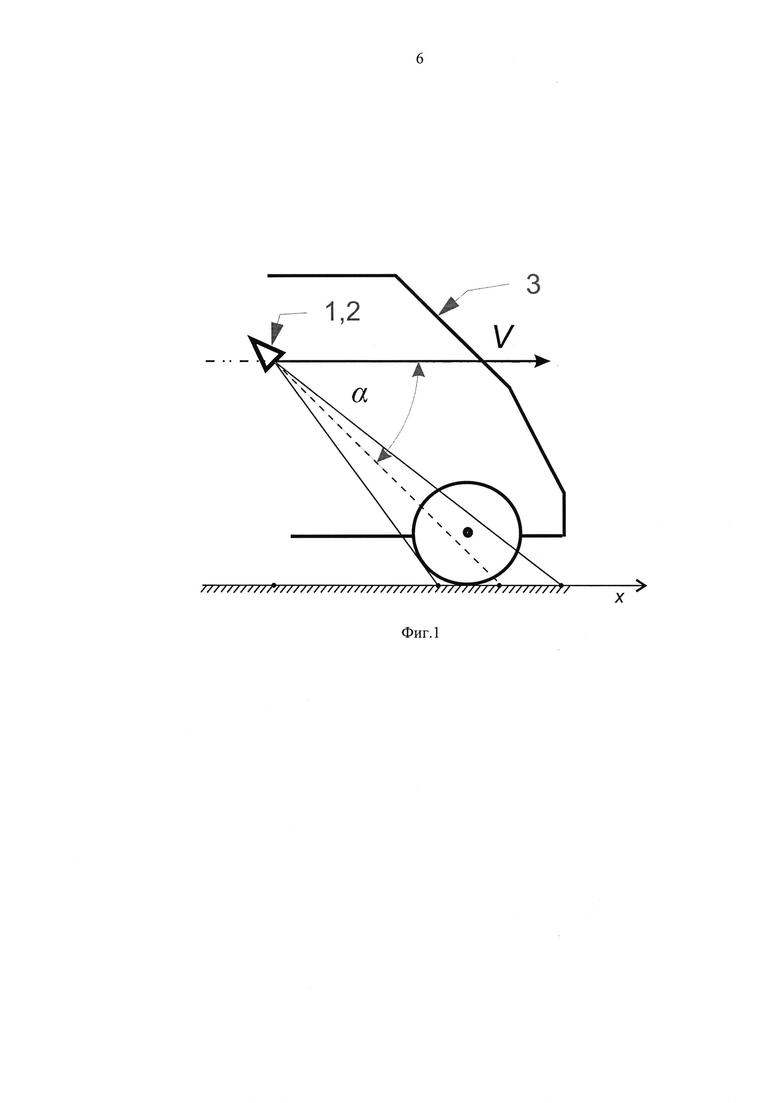
В настоящее время известны и применяются радиоволновые способы измерения путевой скорости, основанные на эффекте Доплера (Викторов В.А., Лункин Б.В., Совлуков А.С. Радиоволновые измерения параметров технологических процессов. М.: Энергоатомиздат, 1989. 124-132 с.). Обычно они применяются в радиолокации для определения скорости и координат движущихся объектов. Также они находят применение для измерения путевой скорости автомобилей и железнодорожных составов. Доплеровский способ измерения заключается в зондировании движущихся объектов электромагнитными волнами СВЧ диапазона и выделении частоты смещения рассеянной волны. Если источник излучения с фиксированной частотой  расположен спереди транспортного средства, движущегося со скоростью V, и его антенна направлена под углом α между направлением движения и подстилающей поверхностью, то доплеровская частота
расположен спереди транспортного средства, движущегося со скоростью V, и его антенна направлена под углом α между направлением движения и подстилающей поверхностью, то доплеровская частота  определится по формуле:
определится по формуле:

где  - длина волны в среде измерения, а ε - ее диэлектрическая проницаемость, которая для воздуха равна единице, c - скорость света в воздухе. Таким образом, измеряя доплеровскую частоту, можно вычислять скорость по формуле:
- длина волны в среде измерения, а ε - ее диэлектрическая проницаемость, которая для воздуха равна единице, c - скорость света в воздухе. Таким образом, измеряя доплеровскую частоту, можно вычислять скорость по формуле:

Важным достоинством доплеровского способа измерения скорости перед измерением с использованием одометра для колесных видов транспорта является тот факт, что результат измерения не зависит от диаметра колес и давления в шинах, также на нее не влияет движение во внештатных режимах (занос, юз, скольжение, буксование). Поэтому применение этого способа для измерения путевой скорости является более точным, хотя он также как и одометр представляет скорость в одномерном виде. В то же время в автоблокировочных системах и системах распределения тормозных усилий в современных автомобилях предпочтительно получение информации о двухкоординатном векторе скорости перемещения. Это также важно и для использования в автономных навигационных системах (например, инерционных), которые в настоящее время предпочтитают применять совместно с системами глобального позиционирования (GPS, ГЛОНАСС и др.). Применение для измерения вектора путевой скорости собственно инерционных систем на основе гироскопов затруднено из-за необходимости их размещения точно в центре тяжести транспортного средства, защиты хрупких механических деталей от вибраций и повреждений, необходимости проведения частых коррекций ошибок, высокой стоимости.
Наиболее близким по технической сущности является способ измерения путевой скорости (Ch. Xu, L. Daniel, E. Hoare, V. Sizov, M. Cherniakov "Comparison of Speed over Ground Estimation Using Acoustic and Radar Doppler Sensors", Proceedings of the 11th European Radar Conference 8-10 Oct 2014, Rome, Italy, pp. 189-192), принятый за прототип. При осуществлении этого способа доплеровские СВЧ датчики располагаются по сторонам транспортного средства и их показания обрабатываются совместно. Это дает возможность повысить точность измерения скорости за счет учета вибраций, крена и тангажа. Однако измерение собственно вектора путевой скорости не производится, поскольку измеряется лишь средняя скорость при движении транспортного средства по направлению его оси. Для измерения же вектора путевой скорости за время Δt необходимо произвести измерение модуля вектора скорости и угла его отклонения относительно первоначального положения оси.
Техническим результатом настоящего изобретения является повышение точности измерения путевой скорости транспортного средства.
Технический результат достигается тем, что в способе измерения путевой скорости, при котором СВЧ волны с длиной волны λ0 излучают с двух сторон транспортного средства под углом β к его оси и углом α между направлением движения и подстилающей поверхностью, принимают отраженные волны, выделяют сигналы с доплеровскими частотами на смесителях между излучаемыми и принимаемыми волнами, измеряют эти частоты  и
и  , определяют модуль средней скорости V за время Δt по формуле
, определяют модуль средней скорости V за время Δt по формуле  . Дополнительно к этому определяют угол поворота транспортного средства ϕ за то же время по формуле
. Дополнительно к этому определяют угол поворота транспортного средства ϕ за то же время по формуле  при ширине транспортного средства, равной r.
при ширине транспортного средства, равной r.
На Фиг. 1 представлено расположение сбоку на транспортном средстве 3 одного из двух одинаковых доплеровских датчиков путевой скорости - 1, 2, реализующих способ.
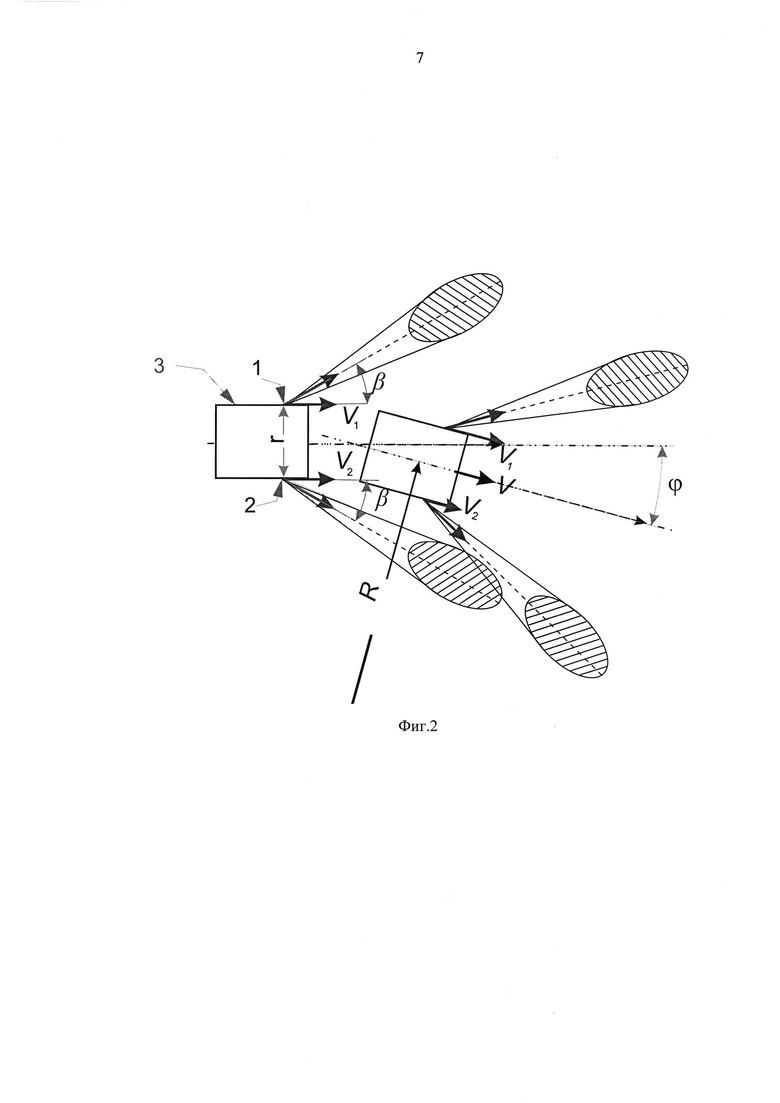
На Фиг. 2 показано расположение доплеровских датчиков 1 и 2 на транспортном средстве 3 сверху при его движении.
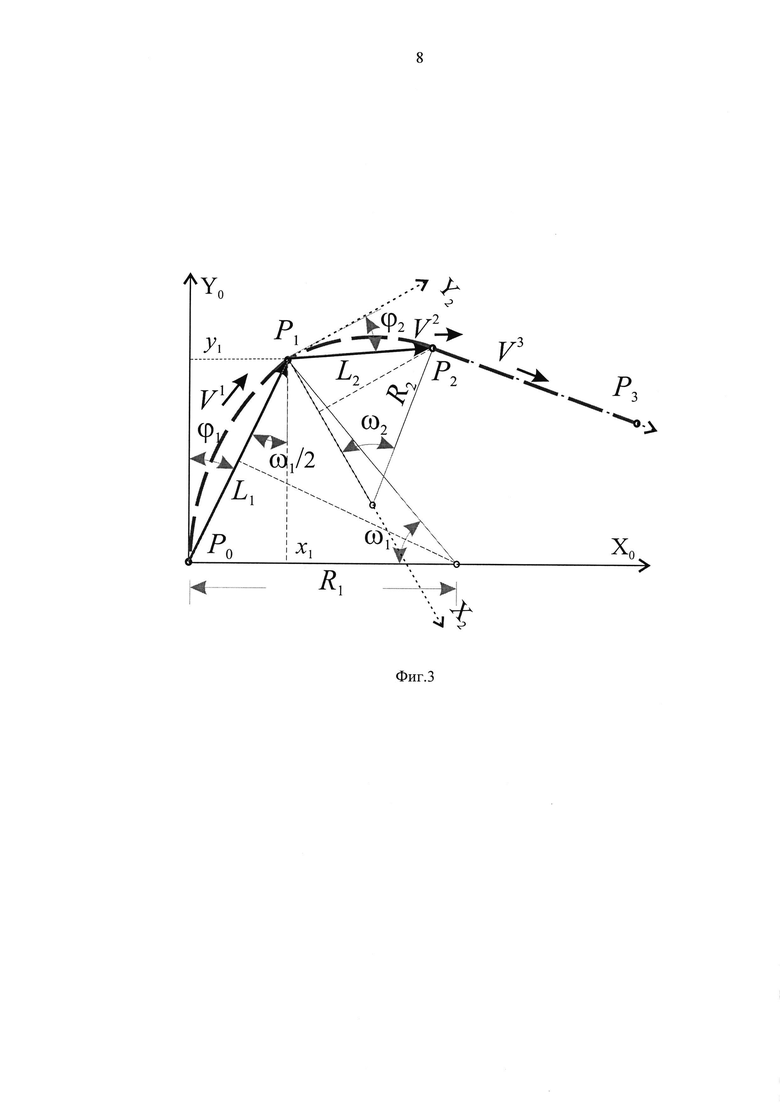
На Фиг. 3 поясняется процесс определения вектора путевой скорости при движении транспортного средства.
Антенна каждого доплеровского датчика скорости расположена на боковой стороне транспортного средства и направлена под углом α к направлению движения, как показано на Фиг. 1, и повернута на угол β от его оси, как показано на Фиг. 2. При этом расстояние между ними равно r. Каждый датчик выделяет доплеровскую частоту, пропорциональную радиальной скорости взаимного перемещения датчиков и подстилающей отражающей поверхности  и
и  . В результате, скорости перемещения точек расположения датчиков V1 и V2 можно определить по формулам:
. В результате, скорости перемещения точек расположения датчиков V1 и V2 можно определить по формулам:

Если транспортное средство движется по прямой, совпадающей с его осью, то эти скорости будут равны. Допустим, происходит поворот направо, как показано на Фиг. 2. Тогда скорость V1 будет больше V2, а движение будет происходить по окружности с радиусом R, проходящей через центр транспортного средства. Его левая и правая стороны будут перемещаться по радиусам R+r/2 и R-r/2, соответственно. Если это состояние сохраняется в течение времени Δt, то радиус можно определить по формуле:

При подстановке в формулу (4) значения скоростей из (3) получим:

Теперь допустим, что перемещение транспортного средства разделено на i=1, 2 …N отрезков времени с дискретностью Δt, где N - общее число таких отрезков. Тогда, если поместить в начале движения (i=1) транспортное средство в центр прямоугольных координат с осью Yi-1, совпадающей с его собственной осью, то за первое время Δt при скоростях  и
и  можно вычислить Ri, лежащий на оси Xi-1 по формуле (5) (см. Фиг. 3). Затем можно определить угол дуги его перемещения wi за время Δt из точки P0 в точку P1 по формуле:
можно вычислить Ri, лежащий на оси Xi-1 по формуле (5) (см. Фиг. 3). Затем можно определить угол дуги его перемещения wi за время Δt из точки P0 в точку P1 по формуле:

Как видно из Фиг. 3, угол отклонения транспортного средства от первоначального направления ϕi при этом равен половине этого угла, тогда с учетом (6) получим:

Поскольку  , то с учетом (3) получим:
, то с учетом (3) получим:

Подставив в выражение (7) значения Ri и Vi из (5) и (8), получим выражение для угла вектора скорости в каждый дискретный отрезок времени Δt:

Таким образом, получив выражение для вектора скорости при перемещении от первоначальной точки P0 к точке P1 и так далее к точкам Pi-1, перемещая систему текущих координат и измеряя соответствующие текущие значения доплеровских частот  и
и  , появляется возможность его непрерывного измерения на всем маршруте транспортного средства с дискретностью Δt.
, появляется возможность его непрерывного измерения на всем маршруте транспортного средства с дискретностью Δt.
Благодаря измерению вектора путевой скорости увеличивается точность измерения пути транспортного средства с возможностью построения маршрута его перемещения. Зная его значение на каждом отрезке маршрута, можно рассчитать путь перемещения при первоначальной системе координат (см. Фиг. 3) по формулам:


При этом длина каждой хорды Li определяется по известной формуле:
 .
.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ВЕКТОРА ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2703281C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2686676C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2662803C1 |
| ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2659821C1 |
| РАДИОВОЛНОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2626411C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2020 |
|
RU2757929C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ ВЫСОКОСКОРОСТНЫХ СНАРЯДОВ ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2022 |
|
RU2790640C1 |
| ЛАЗЕРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2020 |
|
RU2766535C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2019 |
|
RU2715994C1 |
| РАДИОВОЛНОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2017 |
|
RU2663215C1 |
Изобретение относится к измерительной технике, в частности к способам измерения путевой скорости транспортных средств с использованием эффекта Доплера для электромагнитных волн. Технический результат - повышение точности измерения путевой скорости достигается тем, что в способе измерения путевой скорости, при котором СВЧ волны с длиной волны λ0 излучают с двух сторон транспортного средства под углом β к его оси и углом α между направлением движения и подстилающей поверхностью, принимают отраженные волны, выделяют сигналы с доплеровскими частотами на смесителях между излучаемыми и принимаемыми волнами, измеряют эти частоты  и
и  , определяют модуль средней скорости V за время Δt по формуле
, определяют модуль средней скорости V за время Δt по формуле  . Дополнительно к этому определяют угол поворота транспортного средства ϕ за то же время по формуле
. Дополнительно к этому определяют угол поворота транспортного средства ϕ за то же время по формуле  при ширине транспортного средства, равной r. 3 ил.
при ширине транспортного средства, равной r. 3 ил.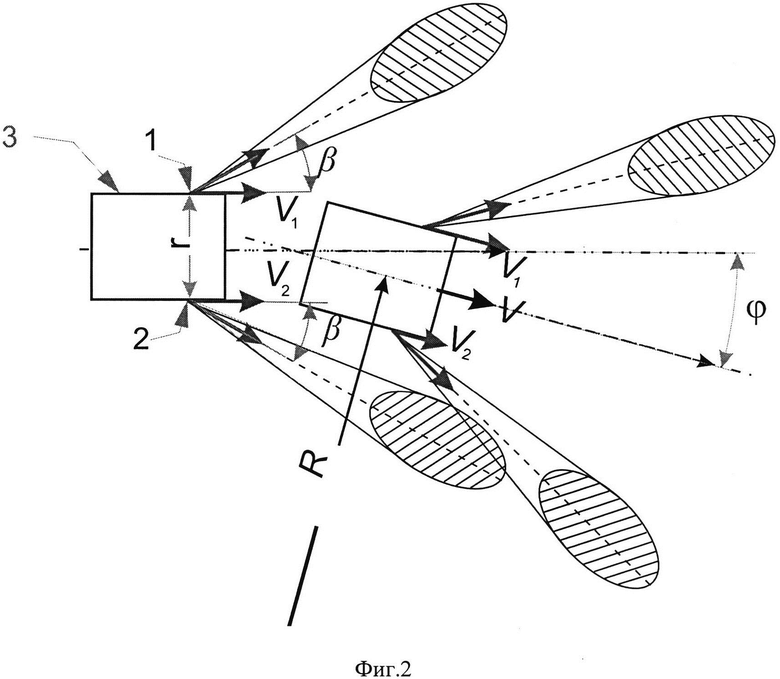
Способ измерения путевой скорости, при котором СВЧ волны с длиной волны λ0 излучают с двух сторон транспортного средства под углом β к его оси и углом α между направлением движения и подстилающей поверхностью, принимают отраженные волны, выделяют сигналы с доплеровскими частотами на смесителях между излучаемыми и принимаемыми волнами, измеряют эти частоты ƒD1 и ƒD2, определяют модуль средней скорости V за время Δt по формуле V=λ0(ƒD1+ƒD2)/4cos(α)cos(β), отличающийся тем, что определяют угол поворота транспортного средства ϕ за то же время по формуле ϕ=λ0(ƒD1-ƒD2)/4πrcos(α)cos(β) при ширине транспортного средства, равной r.
| ДОПЛЕРОВСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2016 |
|
RU2611601C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ МАЛОРАЗМЕРНОГО ВЫСОКОСКОРОСТНОГО ОБЪЕКТА ПРИ ПРОБИТИИ РАЗНЕСЕННЫХ ПРЕГРАД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2311661C2 |
| WO 2012152597 A1, 15.11.2012 | |||
| CN 104345308 A, 11.02.2015. | |||

