Изобретение относится к измерительной технике, в частности к способам измерения путевой скорости и угла сноса летательного аппарата в автономных навигационных системах с использованием электромагнитных волн.
Для решения ряда навигационных задач, в особенности основной задачи навигации - определения места самолета - необходимо знать его полную скорость WH (скорость относительно земной поверхности), где проекцией ее на горизонтальную плоскость является путевая скорость W.
В настоящее время известны и применяются способы для измерения скорости и угла сноса летательного аппарата ЛА, использующие барометрический принцип действия. Он отличается высокой надежностью и простотой реализации, однако имеет существенные недостатки. Барометрический способ измерения скорости определяет воздушную скорость V и не учитывает скорость и направление воздушного потока U. Путевая скорость W является суммой этих двух векторов с учетом вертикальной скорости, поэтому необходима постоянная коррекция из-за изменений в скорости ветра, температуры, плотности воздуха. Корректировка угла сноса осуществляется передачей данных, по ориентирам на местности или по сигналам спутниковой навигации. Это приводит к невысокой точности, особенно при отсутствии связи, видимости или при пропадании сигналов со спутников. Поэтому для определения путевой скорости W и угла сноса ϕ применяются радиоволновые способы на основе эффекта Доплера. Это единственные способы, которые позволяют автономно измерять путевую скорость с учетом угла сноса. В частности, известен способ, описанный в доплеровском измерителе путевой скорости и угла сноса самолета (ДИСС) (Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. М.: Радио и связь, 1994).
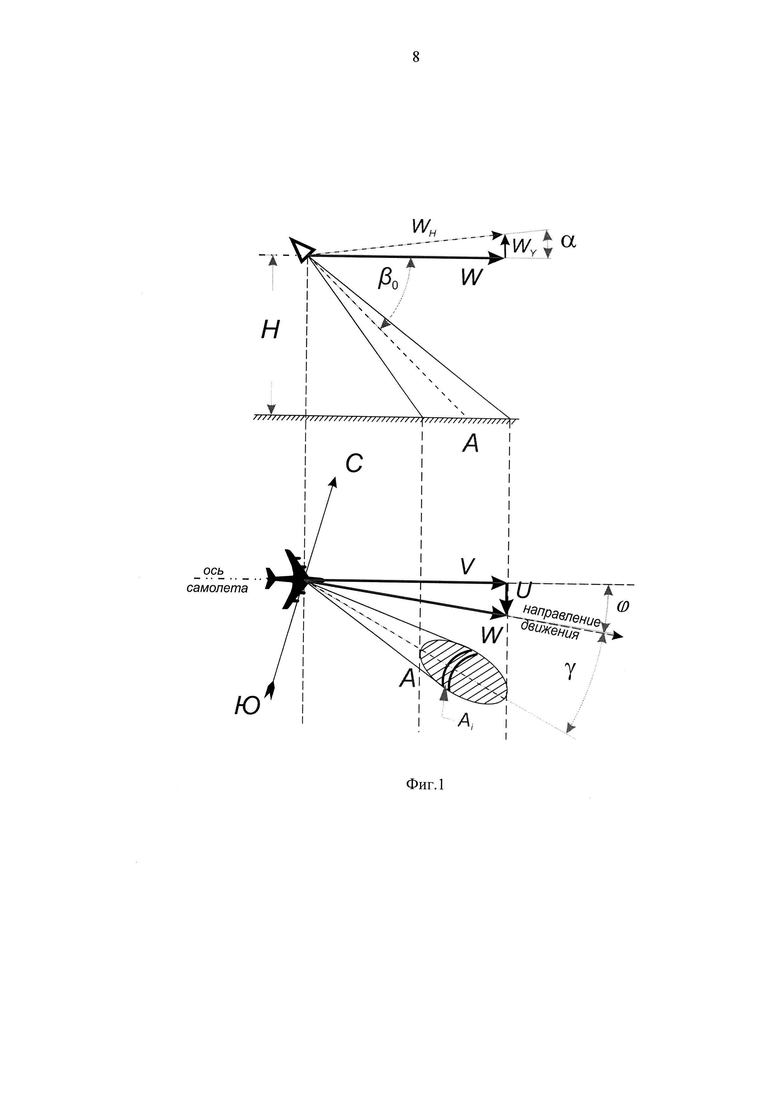
На Фиг. 1 поясняется принцип действия доплеровского однолучевого измерителя путевой скорости и угла сноса.
Как показано на Фиг. 1, в простейшем однолучевом ДИСС радиоволновое излучение с частотой ƒu направляется антенной с ЛА на подстилающую поверхность под углом β0 по направлению полета. Для определения спектра частот отраженного сигнала необходимо вырезать из облучаемой площади А элементарную полоску Ai, все точки которой расположены на направлениях, составляющих угол βi, с вектором скорости W. Имея в виду, что каждой из N элементарных полосок соответствует доплеровский сдвиг частоты ƒDi, для всей облучаемой площади спектр отраженного сигнала можно представить последовательностью частот

где λu=c/ƒu - длина волны излучаемого колебания, с - скорость света в воздухе. Если отражающие свойства поверхности в пределах облучаемой площади одинаковы, то форма огибающей спектра определяется формой диаграммы направленности (ДНА) измерителя в вертикальной плоскости. Максимальную мощность в этом случае имеет сигнал на средней частоте доплеровского спектра, соответствующей направлению Ж (оси ДНА).
Если вектор W горизонтален (высота полета Н постоянна и угол α=0) и составляет с осью ДНА угол γ в горизонтальной и β0 в вертикальной плоскости, то доплеровская частота:
В процессе вращения антенны, при совмещении направления облучения в горизонтальной плоскости с вектором W угол γ=0 и доплеровское приращение частоты достигает максимума:

В этот момент средняя доплеровская частота ƒDm определяется с помощью частотомера, затем вычисляется путевая скорость W по формуле (2). Угол сноса ϕ равен углу, составленному осью самолета и осью ДНА в момент ее совмещения с направлением вектора путевой скорости.
Данный способ не обладает достаточной точностью из-за его низкой чувствительности к изменению угла γ при небольших рассогласованиях направлений W и оси ДНА в горизонтальной плоскости. Снижают точность также наличие вибрации, нестабильность частоты и амплитуды генератора, неравномерные отражающие свойства облучаемой поверхности, - поскольку весь шум, вызванный этими факторами, накладывается на спектр доплеровского сигнала. Особо следует отметить влияние крена и возможного наличия вертикальной составляющей скорости, которые влияют на величину W, но никак не учитываются. Это приводит к необходимости дополнительного измерения высоты или поддержания антенной системы строго в горизонтальном положении, что сильно усложняет и удорожает общую систему навигации.
Более высокую точность показывают многолучевые способы измерения путевой скорости и угла сноса. Наиболее близким по технической сущности является способ измерения путевой скорости и угла сноса (Ю.П. Гришин, В.П. Ипатов, Ю.М. Казаринов и др.; Под ред. Ю.М. Казаринова. Радиотехнические системы - Радиотехнические системы: Учеб. для вузов по спец. «Радиотехника»/М.: Высш. шк., 1990. с. 362), принятый за прототип.
На Фиг. 2 показана схема поясняющая принцип действия доплеровского двухлучевого способа измерения путевой скорости и угла сноса, выбранного в качестве прототипа.
Способ заключается в облучении радиоволнами с фиксированной частотой подстилающей поверхности двумя антеннами, каждая из которых ориентирована под углом θ с каждой из сторон от оси самолета в горизонтальной плоскости и под углом β0 в вертикальной (см. Фиг. 2), приеме отраженных волн, смешивании с частью излучаемой волны и выделении первого и второго доплеровских сигналов, а вычисление путевой скорости W и угла сноса ϕ производится по частотам доплеровских сигналов ƒD1 и ƒD2. При этом не используется поворотное устройство для системы антенн, а путевая скорость W и угол сноса ϕ находится из решения системы двух уравнений с двумя неизвестными:

Данный способ позволяет определить путевую скорость с углом сноса и поперечную составляющую скорости с высокой точностью благодаря высокой чувствительности к изменению доплеровских частот при отклонении оси самолета в горизонтальной плоскости. Положительное влияние на точность также оказывает отказ от использования поворотного устройства. Однако способ не полностью устраняет ошибки от влияния вибрации, нестабильности частоты, свойств отражающей поверхности, не учитывает возможного наличия вертикальной составляющей скорости (при α≠0). Следует отметить также, что при анализе точности этого способа измерения W доплеровский сигнал обычно представляют в виде колебания единственной частоты, тогда как фактически принимаемый сигнал содержит целый спектр доплеровских частот, что было показано ранее. Это вносит дополнительные погрешности в работу ДИСС.
Техническим результатом настоящего изобретения является повышение точности измерения путевой скорости и угла сноса летательного аппарата.
Технический результат достигается тем, что в способе измерения путевой скорости и угла сноса летательного аппарата, заключающемся в облучении радиоволнами подстилающей поверхности двумя антенными системами, каждая из которых ориентирована под углом θ с каждой из сторон от его оси в горизонтальной плоскости и под углом β0 в вертикальной, приеме отраженных волн, смешивании с частью излучаемой волны и выделении двух сигналов разностной частоты, дополнительно частоту радиоволн модулируют по симметричному линейному закону, по каждому из двух сигналов разностной частоты вычисляют пары спектров на растущем и падающем по частоте участках модуляции, соответственно S11, S12 и S21, S22, затем определяют частотные сдвиги, соответствующие максимумам взаимно-корреляционной функции для первой и второй пары спектров - ƒD1 и ƒD2, определяют частотный сдвиг dƒ максимума взаимно-корреляционной функции между суммами спектров S11 и S12, сдвинутых по частотной шкале на ƒD1 в сторону увеличения и уменьшения соответственно и вычисленных через промежуток времени dt, по величинам ƒD1, ƒD2 и dƒ вычисляют путевую скорость W и угол сноса ϕ.
На Фиг. 3а и Фиг. 3б изображены соответственно временные диаграммы изменения частоты излучения и сигнала разностной частоты, представленной в виде колебания единственной частоты.
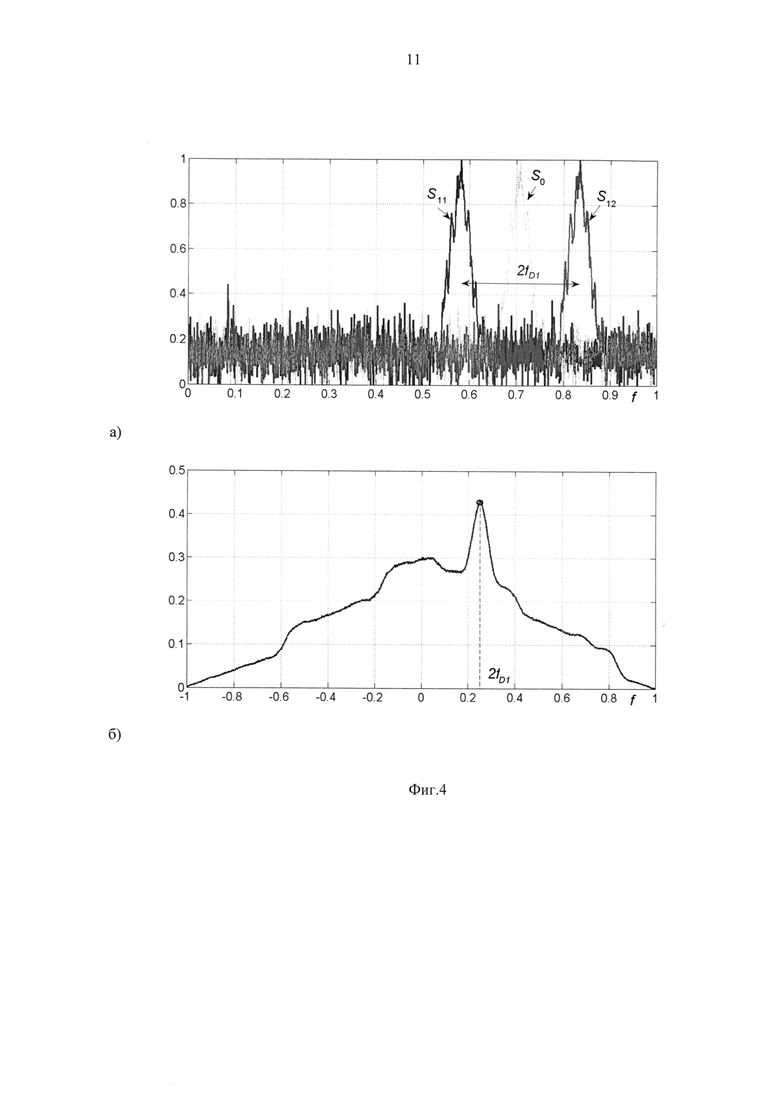
На Фиг. 4а и Фиг. 4б представлены огибающие спектров сигналов разностной частоты при нулевой скорости S0(ƒ) и при движении с путевой скоростью W≠0 на растущем S11(ƒ) и падающем S12(ƒ) участках частоты излучения для первой антенной системы и, соответственно, их взаимно-корреляционная функция.
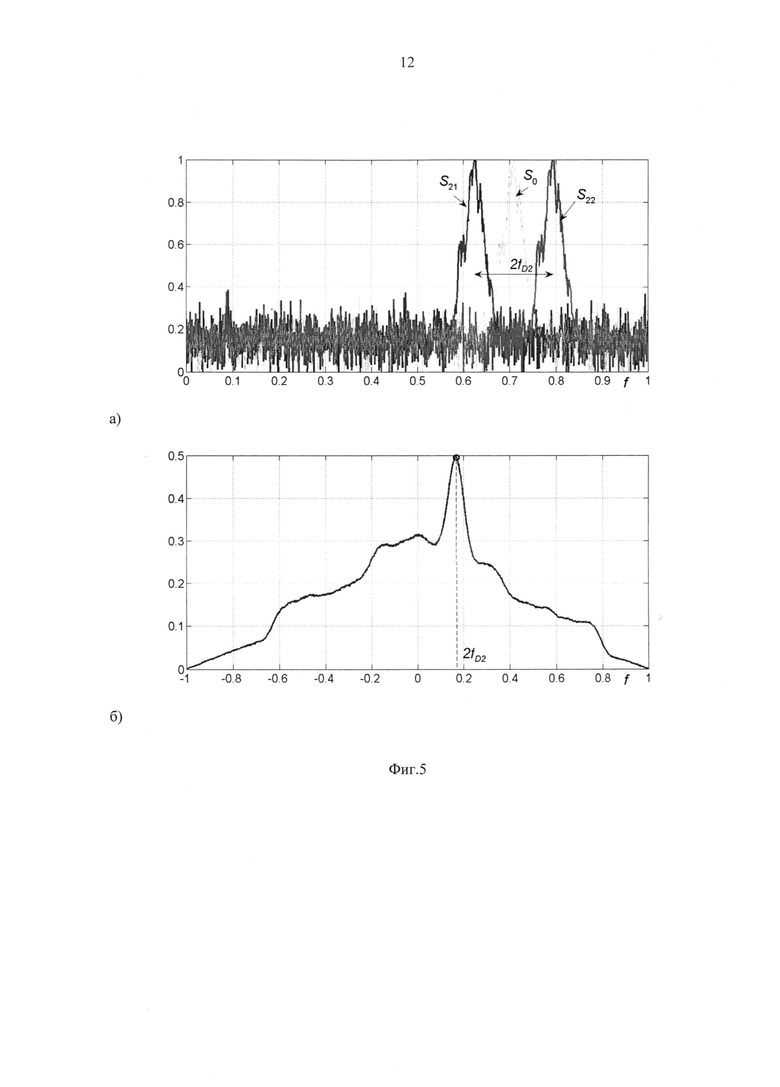
На Фиг. 5а и Фиг. 5б представлены огибающие спектров сигналов разностной частоты при нулевой скорости S0(ƒ) и при движении с путевой скоростью W≠0 на растущем S21(ƒ) и падающем S22(ƒ) участках частоты излучения для второй антенной системы и, соответственно, их взаимно-корреляционная функция.
На Фиг. 6а представлены спектры  и
и  , представляющие из себя сумму спектров S11 и S12, сдвинутых по частотной шкале на ƒD1 в сторону увеличения и уменьшения соответственно в начале и конце временного отрезка dt, а на Фиг. 6б представлена взаимно-корреляционная функция между спектрами и .
, представляющие из себя сумму спектров S11 и S12, сдвинутых по частотной шкале на ƒD1 в сторону увеличения и уменьшения соответственно в начале и конце временного отрезка dt, а на Фиг. 6б представлена взаимно-корреляционная функция между спектрами и .
Способ реализуют следующим образом. Подстилающую поверхность облучают радиоволнами от двух антенных систем, каждая из которых ориентирована под углом θ с каждой из сторон от оси ЛА в горизонтальной плоскости и под углом β0 в вертикальной (см. Фиг. 2). При этом, как показано на Фиг. 3а, частоту излучения в каждой из антенных систем изменяют по симметричному линейному закону в диапазоне Δƒ=ƒ2-ƒ1, где ƒ1 и ƒ2 - его начальная и конечная частота. Сначала за время первого полупериода модуляции ТM частота растет от ƒ1 до ƒ2, затем за это же время линейно уменьшается от ƒ2 до ƒ1 (см. кривая 1, Фиг. 3а). Отраженная волна возвращается с временной задержкой на распространение до поверхности и обратно (см. кривая 2, Фиг. 3а). Если предположить, что путевая скорость равна нулю и используется антенная система с идеальной диаграммой направленности, то после смешивания с частью излучаемой волны на смесителе на его выходе образуется сигнал разностной частоты (сигнал биений):

где Н - высота ЛА. При движении ЛА с путевой скоростью W частота принимаемой волны уменьшается на растущем участке (см. кривая 3, Фиг. 3а) и увеличивается на падающем участке на величину доплеровского смещения частоты ƒD, как показано на Фиг. 3б. Как было показано ранее, фактически принимаемый сигнал содержит целый спектр разностных частот, примерно как показано на Фиг. 4а. Так, если путевая скорость ЛА W равна нулю, то спектр сигнала биений можно выразить по формуле:

где si - выборки функции, описывающей реальный спектр разностного сигнала, i=1, 2…,n - число равномерных выборок функции при изменении β0-Θ/2≤βi≤β0+Θ/2, Θ - ширина ДНА. Спектры выбираются в моменты времени (помечено штриховкой на Фиг. 3б), исключающие «зоны обращения». При этом они будут одинаковы на растущем и падающем участках СПЧМ. При движении вперед спектр на растущем участке уменьшается на величину доплеровской частоты S1(ƒ)=S0(ƒ)-ƒD, а на падающем участке увеличивается на ту же величину S2(ƒ)=S0(ƒ)+ƒD (см. Фиг. 5а и фиг.6а). При вычислении взаимно-корреляционной функции положение ее максимума будет соответствовать частотному сдвигу, равному удвоенной доплеровской частоте (см. Фиг. 5б и Фиг. 6б). Таким образом, можно определить две доплеровские частоты двух антенных систем ƒD1 и ƒD2 и, решая уравнения (3), определить путевую скорость и угол сноса. Точность измерения путевой скорости будет выше, поскольку наличие спектральных составляющих в итоговом сигнале разностной частоты в этом случае не искажает результат вычисления доплеровского частотного сдвига, также снижается влияние вибраций и отражающих свойств подстилающей поверхности.
До сих пор, как и в прототипе, полагалось, что полет ЛА происходит в горизонтальной плоскости. Если же ЛА летит с набором высоты или снижается, то появляется вертикальная составляющая полной скорости WY (см. Фиг. 1 и Фиг. 2), которая не дает приращения горизонтального пути ЛА, но входит в результат измерений доплеровских частот для обеих антенных систем, соответственно уменьшая или увеличивая ее значение. Это может привести к значительной ошибке в измерении путевой скорости. В итоге система уравнений (3) примет вид:

знак « - » у второго члена в уравнениях идет при наборе высоты (кабрировании), а «+» - при снижении (пикировании).
Таким образом, для точного измерения путевой скорости необходимо также знать текущее значение вертикальной скорости WY. Для этого воспользуемся симметричным расположением виртуального спектра сигнала биений при нулевой путевой скорости S0 относительно спектров на растущем S1 и падающем S2 участках. Положение спектра покоя S0 можно определить, передвинув массив спектра S1 вправо на величину ранее определенного доплеровского смещения ƒD1. Также можно сделать, если спектр S2 сдвинуть влево по частотной оси на ƒD1 (см. Фиг. 4а и Фиг5а). Однако для большей надежности данных можно взять нормированную сумму этих смещенных спектров и получить значение (см. Фиг. 6а). В качестве спектров S1 и S2 можно взять результаты с любого из двух антенных систем, однако для определенности будем считать S1=S11 и S2=S12. Далее, если фиксировать значения этих спектров через временной интервал dt, как и  , можно вычислить взаимно-корреляционную функцию между ними и определить по положению ее максимума частотное смещение dƒ (см. Фиг. 6а,б). По этой величине можно судить о смещении частоты биений, пропорциональной текущей высоте Н, как для одночастотного представления (см. формулу 4), так и для спектрального (см. формулу 5). Таким образом, по отношению величин dƒ и dt определяется изменение высоты по времени, т.е. значение вертикальной скорости WY.
, можно вычислить взаимно-корреляционную функцию между ними и определить по положению ее максимума частотное смещение dƒ (см. Фиг. 6а,б). По этой величине можно судить о смещении частоты биений, пропорциональной текущей высоте Н, как для одночастотного представления (см. формулу 4), так и для спектрального (см. формулу 5). Таким образом, по отношению величин dƒ и dt определяется изменение высоты по времени, т.е. значение вертикальной скорости WY.
Далее дело сводится к решению системы двух уравнений с двумя неизвестными (6) - W и ϕ. При этом в уравнениях длину волны высокочастотного излучения λu можно вполне выбрать равной середине модулированного по частоте излучения, поскольку имеют место соотношения ƒu>>ƒb>>ƒD.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2662803C1 |
| ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2659821C1 |
| ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ПУТЕВОЙ СКОРОСТИ | 2016 |
|
RU2611440C1 |
| ДОПЛЕРОВСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2016 |
|
RU2611601C1 |
| ИЗМЕРИТЕЛЬ ВЕКТОРА ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2703281C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ ВЫСОКОСКОРОСТНЫХ СНАРЯДОВ ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2022 |
|
RU2790640C1 |
| РАДИОВОЛНОВЫЙ СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2017 |
|
RU2663215C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА ПУТЕВОЙ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2654931C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2020 |
|
RU2757929C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПУТЕВОЙ СКОРОСТИ | 2018 |
|
RU2683578C1 |



Изобретение относится к измерительной технике, в частности к способам измерения путевой скорости и угла сноса летательного аппарата в автономных навигационных системах с использованием электромагнитных волн. Достигаемый технический результат - увеличение точности измерений. Указанный результат достигается тем, что в способе измерения путевой скорости и угла сноса летательного аппарата, заключающемся в облучении радиоволнами подстилающей поверхности двумя антенными системами, каждая из которых ориентирована под углом θ с каждой из сторон от его оси в горизонтальной плоскости и под углом β0 в вертикальной, приеме отраженных волн, смешивании с частью излучаемой волны и выделении двух сигналов разностной частоты, частоту радиоволн модулируют по симметричному линейному закону, по каждому из двух сигналов разностной частоты вычисляют пары спектров на растущем и падающем по частоте участках модуляции, соответственно S11, S12 и S21, S22, затем определяют частотные сдвиги, соответствующие максимумам взаимно-корреляционной функции для первой и второй пары спектров - ƒD1 и ƒD2, определяют частотный сдвиг dƒ максимума взаимно-корреляционной функции между суммами спектров S11 и S12, сдвинутых по частотной шкале на fD1 в сторону увеличения и уменьшения соответственно и вычисленных через промежуток времени dt, по величинам ƒD1, ƒD2 и dƒ вычисляют путевую скорость W и угол сноса ϕ. 6 ил.
Способ измерения путевой скорости и угла сноса летательного аппарата, заключающийся в облучении радиоволнами подстилающей поверхности двумя антенными системами, каждая из которых ориентирована под углом θ с каждой из сторон от его оси в горизонтальной плоскости и под углом β0 в вертикальной, приеме отраженных волн, смешивании с частью излучаемых волн и выделении двух сигналов разностной частоты, отличающийся тем, что частоту радиоволн модулируют по симметричному линейному закону, по каждому из двух сигналов разностной частоты вычисляют пары спектров на растущем и падающем по частоте участках модуляции, соответственно S11, S12 и S21, S22, затем определяют частотные сдвиги, соответствующие максимумам взаимно-корреляционной функции для первой и второй пар спектров -  и
и  , определяют частотный сдвиг
, определяют частотный сдвиг  максимума взаимно-корреляционной функции между суммами спектров S11 и S12, сдвинутых по частотной шкале на
максимума взаимно-корреляционной функции между суммами спектров S11 и S12, сдвинутых по частотной шкале на  в сторону увеличения и уменьшения соответственно и вычисленных через промежуток времени dt, по величинам
в сторону увеличения и уменьшения соответственно и вычисленных через промежуток времени dt, по величинам  и
и  вычисляют путевую скорость W и угол сноса ϕ.
вычисляют путевую скорость W и угол сноса ϕ.
| Радиотехнические системы | |||
| Под ред | |||
| КАЗАРИНОВА Ю.М | |||
| Москва, "Радиотехника" | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| RU 154776 U1, 10.09.2015 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИСТАНЦИОННО-ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2292069C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА ЗЕМНОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2231757C1 |
| WO 2005045459 A3, 07.07.2005 | |||
| WO 2003073125 A1, 04.09.2003 | |||
| US 5549477 A, 27.08.1996. | |||

