Для настоящей заявки испрашивается приоритет по предварительной заявке на патент США №62/031,487 на изобретение «Система обмена давления с двигательной системой», поданной 31 июля 2014 г., которая полностью включена в настоящую заявку посредством ссылки.
Область техники, к которой относится изобретение
Изобретение относится к области нефтегазовой промышленности, в частности, к оборудованию и технологиям для осуществления гидравлического разрыва пласта.
Уровень техники
Данный раздел предназначен для ознакомления с различными аспектами уровня техники, которые могут относиться к различным аспектам настоящего изобретения, описанным и/или заявленным ниже. Данное описание предоставляет информацию о предшествующем уровне техники для облегчения понимания различных аспектов настоящего изобретения. Таким образом, следует понимать, что следующие утверждения приведены для достижения указанной цели, а не для признания предшествующего уровня техники.
Операции по заканчиванию скважины в нефтегазовой промышленности зачастую включают в себя гидравлический разрыв (также называемый гидроразрывом или фрэкингом), который позволяет увеличить выход нефти и газа из пластов. Гидравлический разрыв включает в себя нагнетание в скважину флюида (например, жидкости разрыва), содержащего смесь воды, реагентов и проппанта (например, песка, керамического материала), под высоким давлением. Высокое давление флюида увеличивает размеры трещины и способствует распространению трещины в пласте, из которого должны выходить нефть и газ, а проппант предотвращает закрытие трещин после снятия избыточного давления флюида. При выполнении операций по гидравлическому разрыву используют насосы высокого давления для увеличения давления жидкости разрыва. К сожалению, наличие проппанта в жидкости разрыва может негативно повлиять на работу вращающегося оборудования. При определенных обстоятельствах твердые частицы могут замедлять или блокировать движение вращающихся компонентов.
Раскрытие изобретения
Предложена система обмена давления, содержащая систему гидроразрыва, содержащую гидравлическую систему передачи энергии, выполненную с возможностью обмена давления между первым флюидом и вторым флюидом; а также двигательную систему, соединенную с гидравлической системой передачи энергии и выполненную с возможностью приводить в действие гидравлическую систему передачи энергии.
Первый флюид может представлять собой жидкость без твердых частиц, а второй флюид может представлять собой жидкость с твердыми частицами.
Двигательная система может содержать электромотор.
Гидравлическая система передачи энергии может содержать ротационный изобарический обменник давления (IPX). Ротационный изобарический обменник давления может содержать ротор и гильзу, расположенную вокруг ротора.
Двигательная система может иметь вал, соединенный с ротором. При этом ротор или вал могут содержать постоянный магнит или электромагнит.
Система также может содержать контроллер с одним или несколькими режимами работы, выполненный с возможностью управлять двигательной системой. При этом один или несколько режимов работы включают в себя по меньшей мере один из следующих: режим запуска, режим регулировки скорости, режим непрерывной подачи энергии и/или режим периодической подачи энергии.
Система может содержать датчик, выполненный с возможностью определять, находится ли скорость вращения системы передачи гидравлической энергии в рамках допустимого диапазона, причем контроллер соединен с датчиком и управляет двигательной системой на основании сигналов обратной связи от датчика.
В другом варианте осуществления изобретения предложена система обмена давления, содержащая ротационный изобарический обменник давления (IPX), выполненный с возможностью обмена давления между первым флюидом и вторым флюидом, а также двигательную систему, соединенную с гидравлической системой передачи энергии и выполненную с возможностью приводить в действие гидравлическую систему передачи энергии.
При этом первый флюид может представлять собой жидкость без твердых частиц, а второй флюид может представлять собой жидкость с твердыми частицами.
Двигательная система может содержать электромотор. В частности, электромотор может иметь первые постоянные магниты или первые электромагниты на роторе вращающегося изобарического обменника давления, выполненные с возможностью взаимодействия со вторыми постоянными магнитами или вторыми электромагнитами. При этом вторые постоянные магниты или вторые электромагниты могут быть соединены с валом, проходящим через ротор.
Система также может содержать контроллер с одним или несколькими режимами работы, выполненный с возможностью управлять двигательной системой, причем один или несколько режимов работы включают в себя режим запуска, режим регулировки скорости, режим непрерывной подачи энергии и/или режим периодической подачи энергии.
В еще одном варианте осуществления изобретения предложен способ эксплуатации системы обмена давления, в котором контролируют вращение ротора в ротационном изобарическом обменнике давления (IPX), обнаруживают условия, когда скорость вращения ротора выходит за пределы допустимого диапазона, и при обнаружении данного состояния запускают работу двигательной системы, соединенной с ротационным изобарическим обменником давления.
При контроле скорости вращения ротора с помощью контроллера отслеживают показания датчика расхода, датчика давления, датчика крутящего момента, датчика частоты вращения, звукового датчика, магнитного датчика или оптического датчика.
При запуске работы двигательной системы на основании обнаруженного состоянии выбирают один или несколько режимов работы, включая режим запуска, режим регулировки скорости, режим непрерывной подачи энергии и/или режим периодической подачи энергии.
Техническим эффектом изобретения является, в том числе, облегчение вращения гидравлической системы передачи энергии при использования высоковязких флюидов или флюидов с твердыми частицами, что позволит выполнять ее быстрый запуск.
Кроме того, гидравлическая система передачи энергии предотвращает или ограничивает износ насосов высокого давления, а также позволяет системе гидроразрыва нагнетать в скважину жидкость разрыва под высоким давлением.
Двигательная система также может создать дополнительное усилие, которое позволит гидравлической системе передачи энергии измельчать твердые частицы для поддержания правильной рабочей скорости при использовании высоковязких жидкостей и жидкостей, нагруженных твердыми частицами. Также двигательная система может обеспечивать более точное перемешивание флюидов в гидравлической системе передачи энергии за счет изменения рабочей скорости.
Краткое описание чертежей
Различные признаки, аспекты и преимущества настоящего изобретения станут более понятными после ознакомления со следующим подробным описанием, приведенным со ссылкой на сопроводительные чертежи, на которых одинаковыми ссылочными позициями обозначены аналогичные детали.
На Фиг. 1 представлено схематическое изображение варианта гидравлической системы передачи энергии с двигательной системой.
На Фиг. 2 представлен общий разобранный вид варианта ротационного изобарического обменника давления (IPX).
На Фиг. 3 представлен общий разобранный вид варианта ротационного IPX, находящегося в первом рабочем положении.
На Фиг. 4 представлен общий разобранный вид варианта ротационного IPX, находящегося во втором рабочем положении.
На Фиг. 5 представлен общий разобранный вид варианта ротационного IPX, находящегося в третьем рабочем положении.
На Фиг. 6 представлен общий разобранный вид варианта ротационного IPX, находящегося в четвертом рабочем положении.
На Фиг. 7 представлен поперечный разрез варианта ротационного IPX, имеющего двигательную систему.
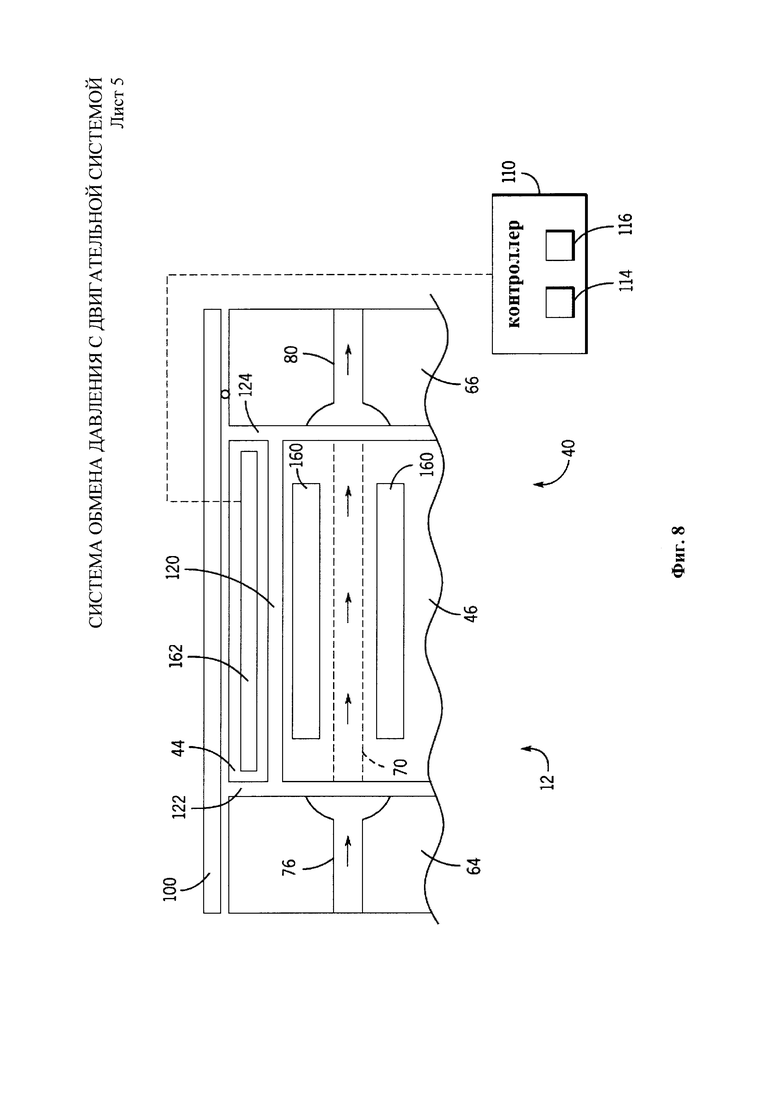
На Фиг. 8 представлен поперечный разрез варианта ротационного IPX и двигательной системы, выполненный по линии 8-8 с Фиг. 7.
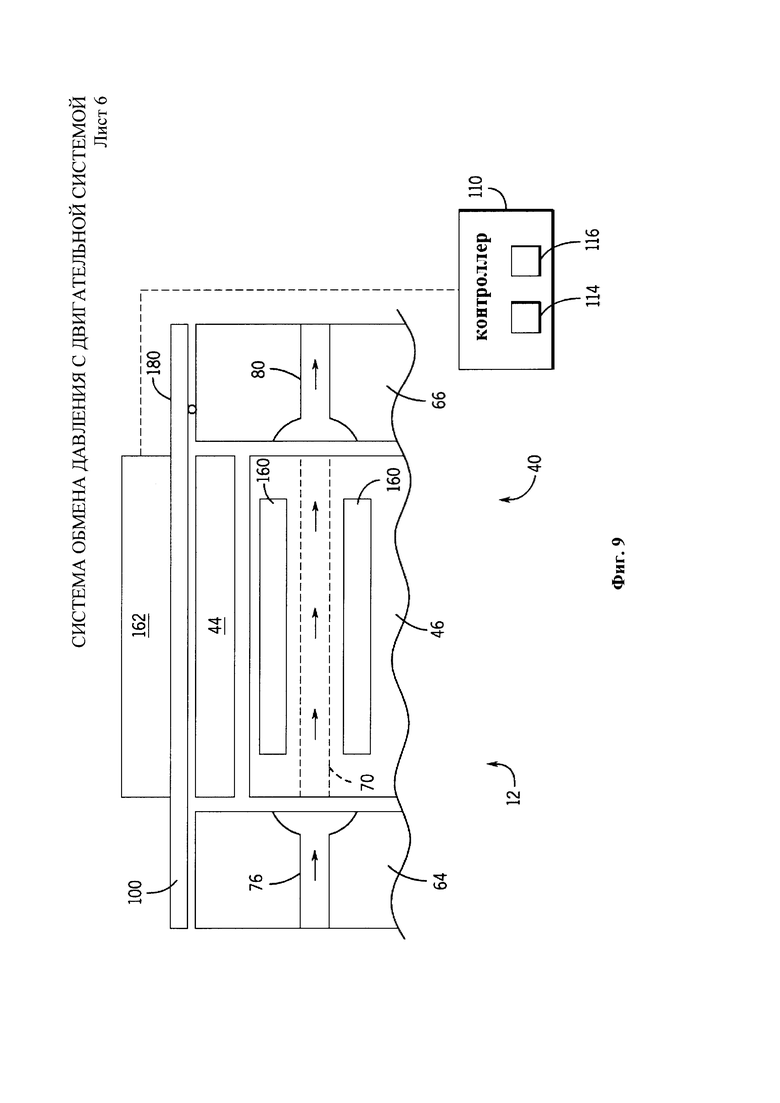
На Фиг. 9 представлен поперечный разрез варианта ротационного IPX и двигательной системы, выполненный по линии 8-8 с Фиг. 7.
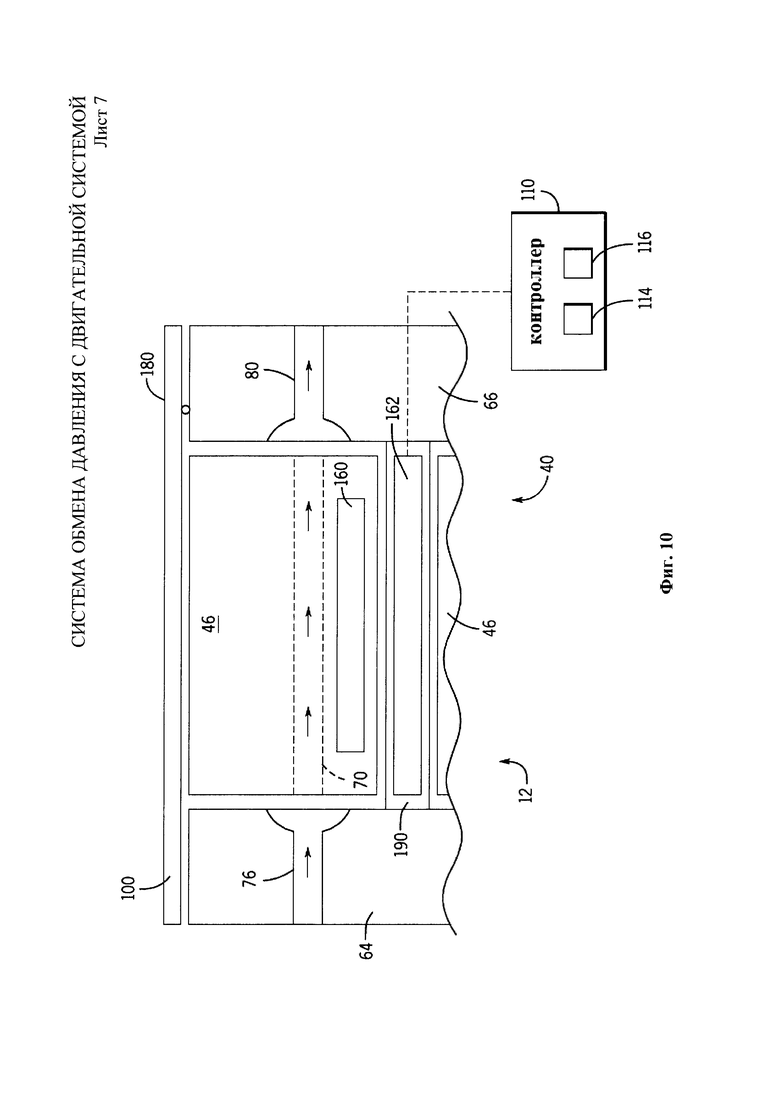
На Фиг. 10 представлен поперечный разрез части ротационного IPX с двигательной системой, выполненный по линии 8-8 на Фиг. 7.
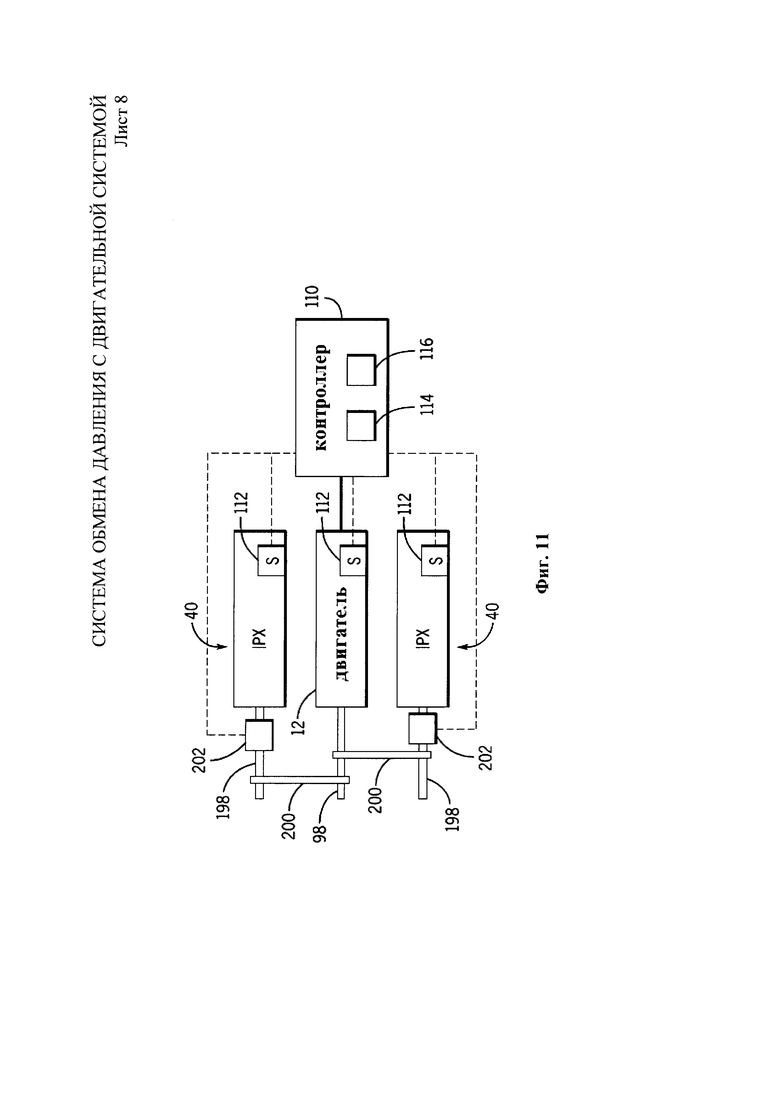
На Фиг. 11 представлен вид сбоку варианта двигательной системы, которая приводит в движение несколько ротационных IPX.
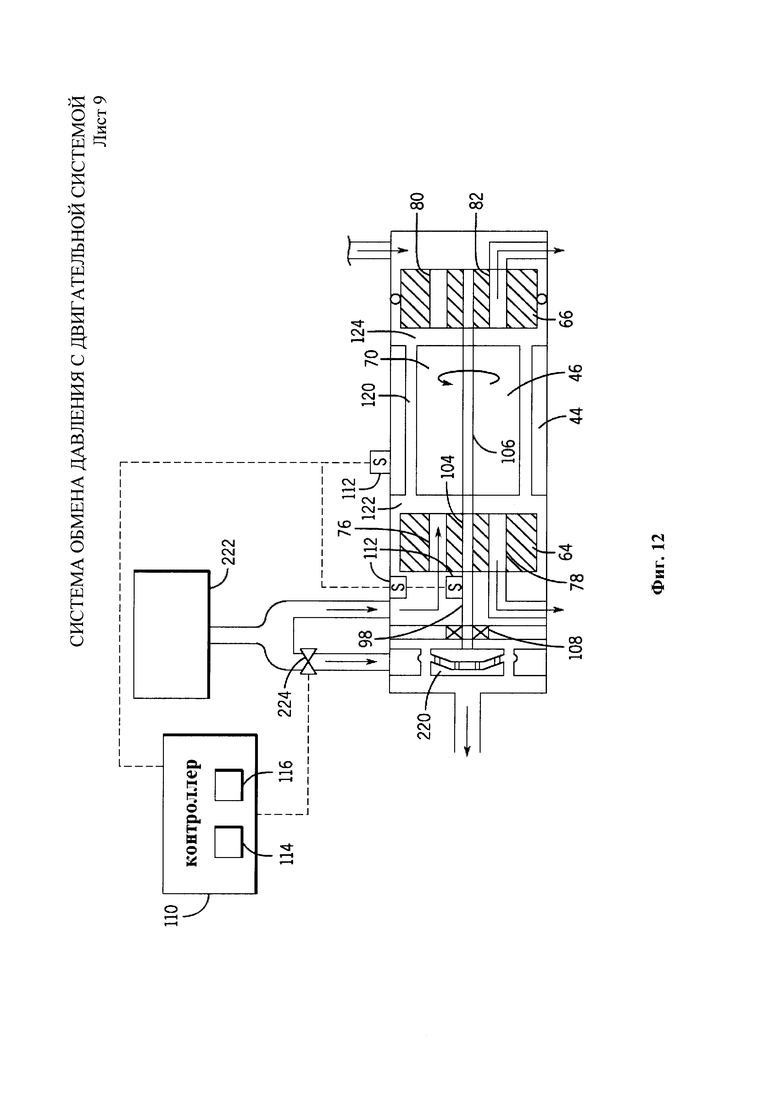
На Фиг. 12 представлен поперечный разрез варианта гидравлической двигательной системы, соединенной с ротационным IPX.
Осуществление изобретения
Ниже приведено описание одного или нескольких вариантов осуществления настоящего изобретения. Рассмотренные варианты качестве примера. Кроме того, для краткости описания данных иллюстративных вариантов осуществления в данном документе не приводятся все признаки вариантов применения. Следует понимать, что при разработке любого такого варианта применения, например, в инженерном проекте или технологической схеме, необходимо будет добавить несколько индивидуальных решений, направленных на достижение конкретных целей разработчиков, таких как соблюдение ограничений, связанных с системными или коммерческими аспектами, которые могут варьироваться в каждом конкретном варианте применения. Более того, следует понимать, что подобные опытно-конструкторские работы могут быть сложными и требовать больших временных затрат, однако, тем не менее, для специалиста в данной области техники они являются стандартными процедурами по проектированию, изготовлению и производству с использованием преимуществ данного изобретения.
Как более подробно будет описано ниже, система гидроразрыва или система гидравлического разрыва включает в себя гидравлическую систему передачи энергии, которая передает работу и/или давление между первым флюидом (например, жидкостью обмена давления, такой как флюид без проппанта) и вторым флюидом (например, жидкостью разрыва, такой как флюид с проппантом). Например, первый флюид может находиться под первым давлением, которое больше второго давления второго флюида примерно на 5000-25000 кПа, 20000-50000 кПа, 40000-75000 кПа, 75000-100000 кПа или более. Во время работы гидравлическая система передачи энергии может полностью выравнивать давление между первым и вторым флюидами. Соответственно гидравлическая система передачи энергии может работать в изобарическом или практически изобарическом режиме (в котором значения давления первого и второго флюидов различаются, например, не более чем на ±1, 2, 3, 4, 5, 6, 7, 8, 9 или 10 процентов).
Указанная гидравлическая система передачи энергии также может быть описана как гидравлическая защитная система, гидравлическая буферная система или гидравлическая изоляционная система, поскольку она блокирует или ограничивает контакт между жидкостью разрыва и другим оборудованием для гидроразрыва пласта (например, насосами высокого давления), а также обеспечивает обмен работы и/или давления между первым и вторым флюидами. Благодаря блокированию или ограничению контакта между различными частями оборудования для гидроразрыва и вторым флюидом (например, флюидом с проппантом) гидравлическая система передачи энергии снижает истирание и износ, тем самым увеличивая срок службы и повышая производительность данного оборудования (например, насосов высокого давления). Более того, при наличии гидравлической системы передачи энергии в системе гидравлического разрыва можно использовать менее дорогостоящее оборудование, например, насосы высокого давления, которые не предназначены для работы с абразивными флюидами (например, жидкостями разрыва и/или коррозионными жидкостями). В некоторых вариантах осуществления гидравлическая система передачи энергии может представлять собой ротационный изобарический обменник давления (ротационный IPX - isobaric pressure exchanger). Ротационные IPX могут представлять собой устройства, которые передают давление флюида между входящим потоком под высоким давлением и входящим потоком под низким давлением с эффективностью примерно более 50%, 60%, 70%, 80% или 90% без использования центробежных технологий.
Во время работы гидравлическая система передачи энергии передает работу и/или давление между первым и вторым флюидами. Эти флюиды могут представлять собой многофазные флюиды, такие как газожидкостные потоки, потоки газ/твердые частицы, потоки жидкость/твердые частицы, потоки газ/жидкость/твердые частицы или любой другой многофазный поток. Например, многофазные флюиды могут включать в себя песок, твердые частицы, порошки, обломки породы, керамические материалы или их сочетания. Данные флюиды также могут представлять собой неньютоновские жидкости (например, жидкость, разжижающаяся при сдвиге), высоковязкие жидкости, неньютоновские жидкости, содержащие проппант, или высоковязкие жидкости, содержащие проппант. Для облегчения вращения гидравлическая система передачи энергии может быть соединена с двигательной системой (например, электромотором, двигателем внутреннего сгорания, гидравлическим мотором, пневматическим двигателем и/или другим приводом ротора). Во время работы двигательная система обеспечивает вращение гидравлической системы передачи энергии при использовании высоковязких жидкостей и/или жидкостей, содержащих твердые частицы, порошки, обломки породы и т.д. Например, двигательная система может облегчать запуск с высоковязкими жидкостями или жидкостями, содержащими твердые частицы, что позволит выполнить быстрый запуск гидравлической системы передачи энергии. Двигательная система также может создать дополнительное усилие, которое позволит гидравлической системе передачи энергии измельчать твердые частицы для поддержания правильной рабочей скорости (например, частоты вращения, в оборотах в минуту) при использовании высоковязких жидкостей / жидкостей, нагруженных твердыми частицами. В некоторых вариантах осуществления двигательная система также может обеспечивать более точное перемешивание флюидов в гидравлической системе передачи энергии за счет изменения рабочей скорости.
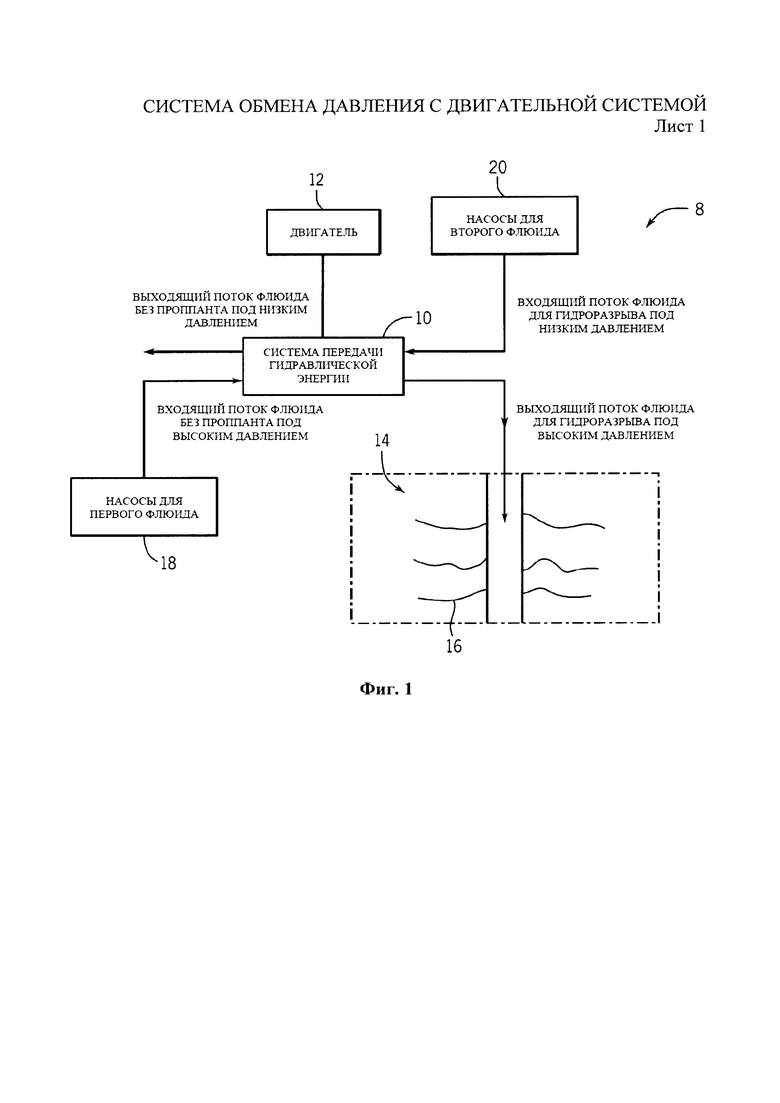
На Фиг. 1 представлено схематическое изображение варианта осуществления системы 8 гидроразрыва (например, системы подачи жидкости) с гидравлической системой 10 передачи энергии, соединенной с двигательной системой 12. Как было сказано выше, двигательная система 12 облегчает вращение системы 10 передачи гидравлической энергии при использовании с высоковязкими жидкостями и/или жидкостями, нагруженными твердыми частицами. Например, во время выполнения операций по заканчиванию скважины система 8 гидроразрыва нагнетает жидкость, содержащую твердые частицы, которая увеличивает выход нефти и газа из пластов 14 за счет распространения трещин 16 и увеличения их размера. Для того чтобы предотвратить закрытие трещин 16 после снятия избыточного давления в системе 8 гидроразрыва, в системе 8 используют жидкости, нагруженные твердыми частицами, порошки, обломки породы и т.д., которые подаются в трещины 16 и не позволяют им закрыться.
Для нагнетания в скважину жидкости, нагруженной твердыми частицами, система 8 гидроразрыва может включать в себя один или несколько насосов 18 для первого флюида и один или несколько насосов 20 для второго флюида, соединенных с гидравлической системой 10 передачи энергии. Например, гидравлическая система 10 передачи энергии может представлять собой ротационный IPX. Во время работы гидравлическая система 10 передачи энергии передает давление без значительного перемешивания первого флюида (например, жидкости без проппанта), нагнетаемого насосами 18 для первого флюида, и второго флюида (например, жидкости с проппантом или жидкости разрыва), нагнетаемого насосами 20 для второго флюида. Таким образом, гидравлическая система 10 передачи энергии предотвращает или ограничивает износ насосов 18 для первого флюида (например, насосов высокого давления), а также позволяет системе 8 гидроразрыва нагнетать в скважину 14 жидкость разрыва под высоким давлением для выхода нефти и газа. Для того чтобы работать в коррозионных и абразивных средах, гидравлическая система 10 передачи энергии может быть изготовлена из материалов, устойчивых к коррозионным и абразивным веществам, которые содержатся в первом и втором флюидах. Например, гидравлическая система 10 передачи энергии может быть изготовлена из керамических материалов (например, глинозема, кермета, таких как карбидные, оксидные, нитридные или боридные твердые фазы) в металлической матрице (например, Со, Cr, Ni или их сочетаниях), например, карбид вольфрама в матрице CoCr, Ni, NiCr или Со.
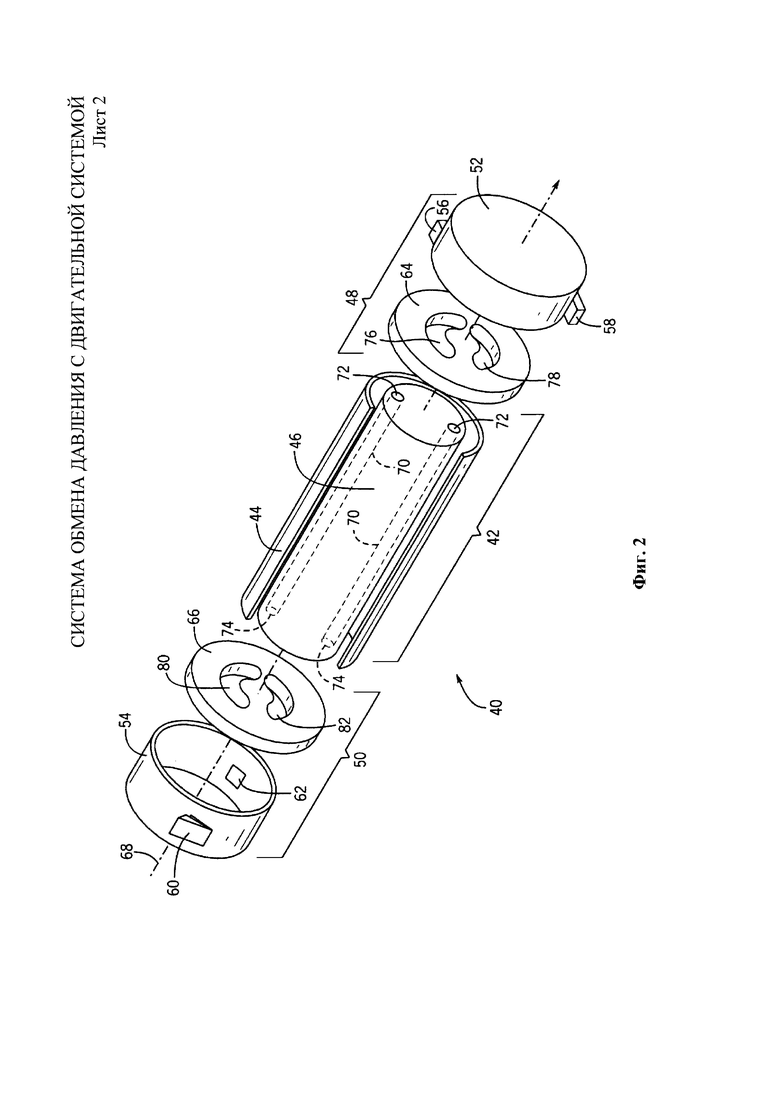
На Фиг. 2 представлен общий разобранный вид варианта ротационного изобарического обменника 40 (ротационного IPX), способного передавать давление и/или работу между первым и вторым флюидами (например, жидкостью без проппанта и жидкостью с проппантом) при минимальном перемешивании данных флюидов. Ротационный IPX 40 может иметь цилиндрическую корпусную часть 42, которая включает в себя гильзу 44 (например, роторную гильзу) и ротор 46. Ротационный IPX 40 также может включать в себя две торцевые заглушки 48 и 50, которые содержат коллекторы 52 и 54 соответственно. Коллектор 52 имеет впускное и выпускное отверстия 56 и 58 соответственно, а коллектор 54 имеет впускное и выпускное отверстия 60 и 62 соответственно. Во время работы данные впускные отверстия 56, 60 позволяют первому и второму флюидам (например, жидкости без проппанта) попадать в ротационный IPX 40 для обеспечения обмена давления, а выпускные отверстия 58, 62 позволяют первому и второму флюидам выходить из ротационного IPX 40. Во время работы во впускное отверстие 56 может поступать первый флюид под высоким давлением, при этом после обмена давления выпускное отверстие 58 может быть использовано для направления первого флюида под низким давлением для выхода из ротационного IPX 40. Аналогичным образом во впускное отверстие 60 может поступать второй флюид под низким давлением (например, жидкость с проппантом, жидкость разрыва), а выпускное отверстие 62 может использоваться для направления второго флюида под высоким давлением на выход из ротационного IPX 40. Торцевые заглушки 48 и 50 включают в себя соответствующие торцевые крышки 64 и 66, расположенные внутри соответствующих коллекторов 52 и 54, чтобы обеспечить контакт с ротором 46 для исключения проникновения флюида. Ротор 46 может иметь цилиндрическую форму и располагаться в гильзе 44, которая позволяет ротору 46 вращаться вокруг оси 68. Ротор 46 может иметь несколько каналов 70, проходящих в продольном направлении через ротор 46, с отверстиями 72 и 74 на каждом конце, расположенными симметрично относительно продольной оси 68. Отверстия 72 и 74 ротора 46 гидравлически связаны с впускными и выпускными отверстиями 76 и 78, а также 80 и 82 в торцевых крышках 52 и 54 таким образом, чтобы во время вращения в каналы 70 попадали флюид под высоким давлением и флюид под низким давлением. Как показано на сопроводительных чертежах, впускные и выпускные отверстия 76 и 78, а также 80 и 82 могут иметь форму дуг или сегментов круга (например, С-образную форму).
В некоторых вариантах осуществления контроллер, использующий сигналы обратной связи от датчиков, может управлять степенью перемешивания первого и второго флюидов в ротационном IPX 40, что может быть использовано для повышения пригодности к эксплуатации системы подачи флюида. Например, изменение соотношения между первым и вторым флюидами, подаваемыми в ротационный IPX 40, позволяет оператору установки контролировать количество флюида, перемешиваемого внутри системы 10 передачи гидравлической энергии. На перемешивание влияют три характеристики ротационного IPX 40: (1) соотношение ширины и диаметра каналов 70 ротора, (2) небольшая продолжительность взаимодействия между первым и вторым флюидами, (3) создание барьера (например, границы) между первым и вторым флюидами внутри каналов 70 ротора. Что касается первой характеристики, каналы 70 ротора являются длинными и узкими, что позволяет стабилизировать поток внутри ротационного IPX 40. Кроме того, первый и второй флюиды могут проходить через каналы 70 в режиме поршневого потока с минимальным осевым перемешиванием. Что касается второй характеристики, в определенных вариантах осуществления скорость ротора 46 сокращает продолжительность контакта между первым и вторым флюидами. Например, скорость ротора 46 может сократить продолжительность контакта между первым и вторым флюидами до менее чем примерно 0,15 секунд, 0,10 секунд или 0,05 секунд. Что касается третьей характеристики, то для обмена давления между первым и вторым флюидами используется небольшая часть канала 70 ротора. Следовательно, некоторое количество флюида остается в канале 70 и выполняет функцию барьера между первым и вторым флюидами. Все эти механизмы позволяют ограничить перемешивание внутри ротационного IPX 40. Более того, в некоторых вариантах осуществления ротационный IPX 40 может быть предназначен для работы с внутренними поршнями, которые изолируют первый и второй флюиды, а также обеспечивают передачу давления.
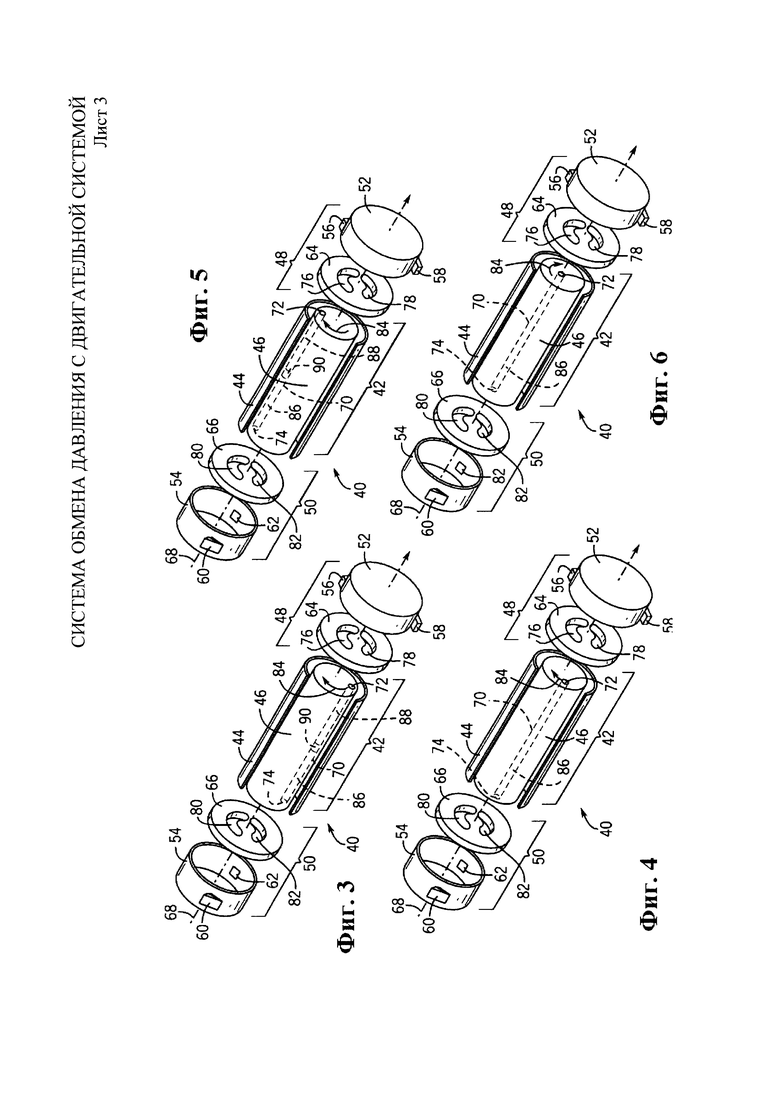
На Фиг. 3-6 представлены изображения в разобранном виде ротационного IPX 40, на которых показана последовательность изменений положения одного канала 70 в роторе 46 по мере поворота канала 70 в рамках одного цикла. Следует отметить, что на Фиг. 3-6 представлены упрощенные изображения ротационного IPX 40, на которых показан один канал 70, и канал 70 показан имеющим круглое поперечное сечение. В соответствии с другими вариантами осуществления ротационный IPX 40 может иметь несколько каналов 70, имеющих поперечное сечение одинаковой или разной формы (например, круглое, овальное, квадратное, прямоугольное, многоугольное и т.д.). Таким образом, упрощенные изображения на Фиг. 3-6 приведены для наглядности, при этом другие варианты осуществления ротационного IPX 40 могут иметь конфигурации, отличные от представленных на Фиг. 3-6. Как более подробно будет описано ниже, ротационный IPX 40 облегчает обмен давления между первым и вторым флюидами (например, жидкостью без проппанта и жидкостью с проппантом) за счет создания кратковременного контакта между первым и вторым флюидами внутри ротора 46. В соответствии с некоторыми вариантами осуществления данный обмен происходит на скоростях, которые позволяют ограничить перемешивание первого и второго флюидов.
На Фиг. 3 отверстие 72 канала находится в первом положении. В первом положении отверстие 72 канала гидравлически связано с отверстием 78 в торцевой пластине 64, и, следовательно, с коллектором 52, при этом противоположное отверстие 74 канала гидравлически связано с отверстием 82 в торцевой крышке 66, и, следовательно, с коллектором 54. Ниже будет сказано, что ротор 46 может вращаться по часовой стрелке, как показано стрелкой 84. Во время работы второй флюид 86 под низким давлением проходит через торцевую крышку 66 и попадает в канал 70, в котором он контактирует с первым флюидом 88 на динамической жидкостной границе 90. Затем второй флюид 86 вытесняет первый флюид 88 из канала 70 через торцевую крышку 64 и, следовательно, из ротационного IPX 40. Однако из-за небольшой продолжительности контакта происходит минимальное перемешивание между вторым флюидом 86 и первым флюидом 88.
На Фиг. 4 показано, что канал 70 повернулся по дуге примерно на 90 градусов по часовой стрелке. В данном положении отверстие 74 больше гидравлически не связано с отверстиями 80 и 82 в торцевой крышке 66, а отверстие 72 больше гидравлически не связано с отверстиями 76 и 78 в торцевой крышке 64. Таким образом, второй флюид 86 под низким давлением временно остается внутри канала 70.
На Фиг. 5 показано, что канал 70 повернулся примерно на 60 градусов по дуге из положения, изображенного на Фиг. 6. При этом отверстие 74 гидравлически связано с отверстием 80 в торцевой крышке 66, а отверстие 72 канала 70 гидравлически связано с отверстием 76 в торцевой крышке 64. В данном положении происходит впуск первого флюида 88 под высоким давлением и сжатие второго флюида 86 под низким давлением, в результате чего происходит вытеснение второго флюида 86 из канала 70 для флюида через отверстие 80, для использования в системе 8 гидроразрыва.
На Фиг. 6 показано, что канал 70 повернулся примерно на 270 градусов по дуге из положения, изображенного на Фиг. 6. В данном положении отверстие 74 больше гидравлически не связано с отверстиями 80 и 82 в торцевой крышке 66, а отверстие 72 больше гидравлически не связано с отверстиями 76 и 78 в торцевой крышке 64. Таким образом, снимается давление на первый флюид 88, и он временно остается в канале 70 до тех пор, пока ротор 46 не повернется еще на 90 градусов, начиная следующий цикл.
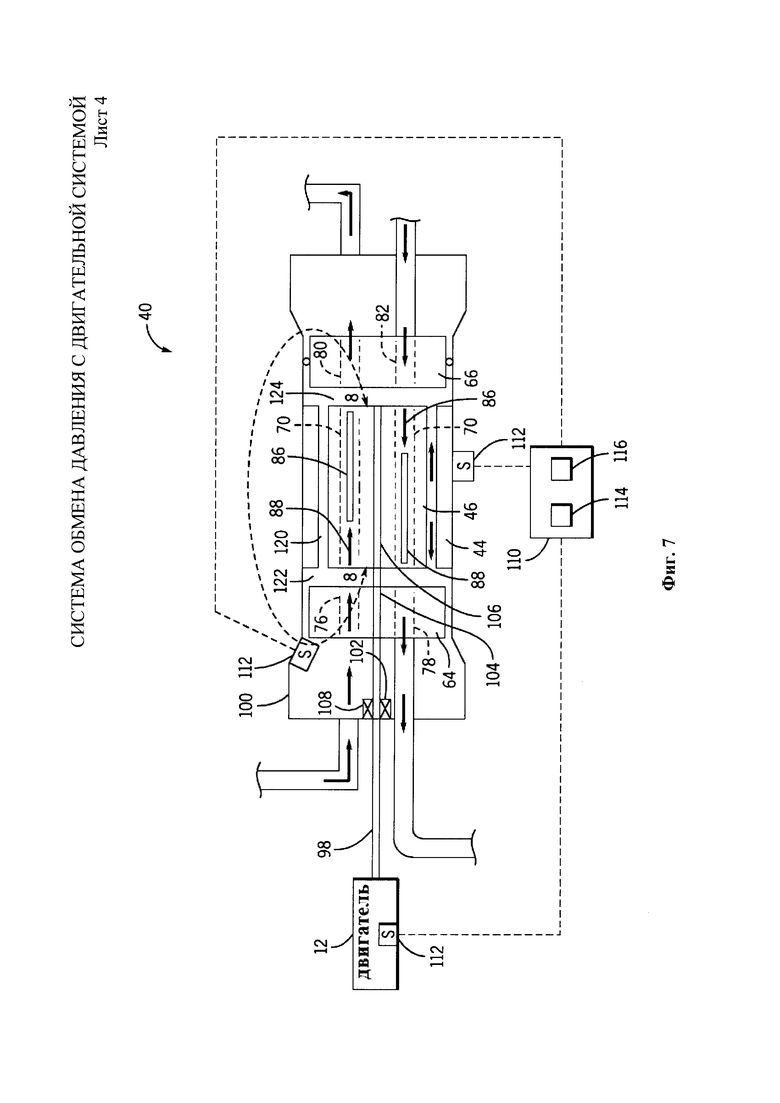
На Фиг. 7 представлен поперечный разрез варианта двигательной системы 12 (например, внешней двигательной системы), соединенной с ротационным IPX 40. Как показано на фигуре, двигательная система 12 включает в себя вал 98, который соединен с ротором 46 через кожух 100. В частности, вал 98 проходит через отверстие 102 в кожухе 100, отверстие 104 в торцевой крышке 64 и отверстие 106 в роторе 46. Для облегчения вращения вала 98 двигательная система 12 также может включать в себя один или несколько подшипников 108, которые поддерживают вал 98. Подшипники 108 могут находиться внутри или снаружи кожуха 100. В некоторых вариантах осуществления вал 98 может полностью проходить через ротор 46 и торцевую крышку 66, что позволит валу 98 опираться на подшипники 108, расположенные на противоположных сторонах ротора 46.
Во время работы двигательная система 12 облегчает работу ротационного IPX 40 за счет передачи крутящего момента для измельчения твердых частиц, для поддержания рабочей скорости ротора 46, контроля перемешивания флюидов внутри ротационного IPX 40 (например, изменения скорости вращения ротора 46) или запуска ротационного IPX 40 при использовании высоковязких флюидов или флюидов, содержащих твердые частицы. Как показано на фигуре, контроллер 110 соединен с двигательной системой 12 и одним или несколькими датчиками 112 (например, датчиками расхода, датчиками давления, датчиками крутящего момента, датчиками частоты вращения, звуковыми датчиками, магнитными датчиками, оптическими датчиками и т.д.). Во время работы контроллер использует сигналы обратной связи от датчиков 112 для управления двигательной системой 12. Контроллер 110 может включать в себя процессор 114 и запоминающее устройство 116, на котором хранятся энергонезависимые компьютерные инструкции, исполняемые процессором 114. Например, при поступлении на контроллер 110 сигналов обратной связи от одного или нескольких датчиков 112 процессор 114 исполняет инструкции, хранящиеся на запоминающем устройстве 116, контролируя выходную мощность двигательной системы 12.
Инструкции, хранящиеся на запоминающем устройстве 116, могут включать в себя разные режимы работы двигательной системы 12 (например, режим запуска, режим контроля скорости, режим непрерывной мощности, режим периодической мощности и т.д.). Например, в режиме запуска контроллер 110 может выполнять инструкции, хранящиеся на запоминающем устройстве 116, и передавать на двигательную систему 12 сигнал о необходимости начала вращения вала 98. Во время работы двигательной системы 12 датчики 112 могут передавать на контроллер 110 сигналы обратной связи, позволяющие определить, вращается ли вал 98 со скоростью, имеющей определенное значение (например, с частотой вращения, в оборотах в минуту), или со скоростью, находящейся в определенном диапазоне. Когда скорость вала 98 достигает желаемого значения или диапазона, контроллер 110 может передавать двигательной системе 12 сигнал о необходимости остановки вала 98, чтобы первый и второй флюиды могли пройти через ротационный IPX 40, а крутящий момент мог быть передан на ротор 46. Однако в некоторых вариантах осуществления ротационный IPX 40 может использовать двигательную систему 12 для периодической передачи крутящего момента на ротор 46 (например, в режиме периодической мощности). Например, во время работы ротационного IPX 40 в установившемся режиме ротор 46 может замедляться при попадании твердых частиц в зазор 120 между ротором 46 и гильзой 44, зазор 122 между ротором 46 и первой торцевой крышкой 64 и/или зазор 124 между ротором 46 и второй торцевой крышкой 66. Через некоторое время это может привести к тому, что твердые частицы замедлят ротор 46, если ротор 46 не сможет измельчить или раздробить твердые частицы достаточно быстро, чтобы вернуть ротационный IPX 40 к скорости вращения в устойчивом режиме. В подобных ситуациях контроллер 110 может получить сигналы обратной связи от датчиков 112, свидетельствующие о снижении или выходе скорости вращения ротора 46 за пределы определенного диапазона. После этого контроллер 110 может выдать двигательной системе 12 сигнал о необходимости передачи крутящего момента на вал 98, чтобы ротор 46 достиг скорости вращения в устойчивом режиме или скорости, находящейся в определенном диапазоне. После достижения ротором 46 нужной скорости вращения контроллер 110 может снова отключить двигательную систему 12. В некоторых вариантах осуществления двигательная система 12 может обеспечивать постоянный входной сигнал/управлять скоростью вращения ротора 46 (например, в режиме непрерывной мощности и/или в режиме регулировки скорости). Например, в некоторых вариантах осуществления ротационный IPX 40 может работать с флюидами, к которым предъявляются требования к перемешиванию (например, требования к взаимодействию). Другими словами, ротационный IPX 40 может ограничивать взаимодействие между первым и вторым флюидами для предотвращения или ограничения количества первого флюида, выходящего из ротационного IPX 40 вместе со вторым флюидом через отверстие 78.
На Фиг. 8 представлен поперечный разрез варианта ротационного IPX 40 и двигательной системы 12, выполненный по линии 8-8 с Фиг. 7. В соответствии с вариантом осуществления с Фиг. 8 двигательная система 12 представляет собой электромотор с постоянными магнитами 160, расположенными по окружности вокруг ротора 46, которые взаимодействуют с электромагнитами 162 (например, обмотками статора) внутри гильзы 44 (например, статора). В некоторых вариантах осуществления гильза 44 может включать в себя постоянные магниты 160, а ротор 46 - электромагниты 162, а в других вариантах и ротор 46, и гильза 44 могут включать в себя электромагниты 162. Более того, в некоторых вариантах осуществления гильза 44 или ротор 46 могут быть полностью или частично изготовлены из магнитного материала (например, материала для постоянного магнита), который будет взаимодействовать с электромагнитами 162. Как показано на фигуре, электромагниты 162 (например, обмотки статора) и постоянные магниты 160 расположены внутри гильзы 44 и ротора 46, соответственно, для обеспечения их защиты от контакта с флюидами, проходящими через ротационный IPX. Однако в некоторых вариантах осуществления электромагниты 162 (например, обмотки статора) и/или постоянные магниты 160 могут быть расположены на наружных поверхностях гильзы 44 и ротора 46.
Во время работы контроллер 110 (например, привод с регулируемой частотой) управляет вращением ротора 46 путем включения и выключения электромагнитов 162 для притягивания и/или отталкивания постоянных магнитов 160. Противодействующее поле обеспечивает вращение ротора со скоростью, пропорциональной частоте поданного напряжения переменного тока. Когда магниты 160, 162 притягиваются и/или отталкиваются друг от друга, они увеличивают или уменьшают вращение ротора 46. Таким образом, подача энергии от двигательной системы 12 облегчает работу ротационного IPX 40, позволяя ротору 46 измельчать твердые частицы, поддерживать определенную рабочую скорость, контролировать перемешивание флюидов внутри ротационного IPX 40 (например, управляя скоростью вращения ротора 46) или запускать ротационный IPX 40 при использовании высоковязких флюидов или флюидов, содержащих твердые частицы. В некоторых вариантах осуществления контроллер 110 может управлять работой двигательной системы на основании сигналов обратной связи от одного или нескольких датчиков 112 (например, датчиков расхода, датчиков давления, датчиков крутящего момента, датчиков частоты вращения, звуковых датчиков, магнитных датчиков, оптических датчиков, датчиков вибрации и т.д.).
В некоторых вариантах осуществления двигательная система 12 может быть использована для производства электроэнергии. Например, ротор 46 может вращаться с первой скоростью, обеспечиваемой движением флюидов через ротационный IPX 40. Затем может быть использован контроллер 110 для того, чтобы двигательная система 12 замедлила вращение ротора 46 до второй скорости, которая меньше первой скорости. В результате возникновения индукции электромагнитные поля будут производить электроэнергию, которую затем можно использовать в различных целях. Например, произведенную электроэнергию можно использовать для подачи питания на другие электрические компоненты, связанные с ротационным IPX 40, такие как на встроенные системы контроля и/или диагностики.
Более того, регулируя скорость ротора 46 с помощью описанной двигательной системы 12, можно напрямую узнать скорость ротора 46. Затем контроллер 110 или другие системы смогут использовать значение скорости ротора 46 для контроля и/или управления работой ротационного IPX 40. Например, если частота вращения ротора 46 ниже первого порогового значения, что может указывать на нежелательный режим работы ротационного IPX 40, контроллер 110 может отправлять соответствующие сигналы на увеличение скорости ротора 46 с помощью двигательной системы 12. Аналогичным образом, если скорость ротора 46 выше второго порогового значения, что также может на нежелательный режим работы ротационного IPX 40, контроллер 12 может снизить скорость ротора 46. Нежелательный режим работы ротационного IPX 40, на который указывает датчик или электрический отклик электронного оборудования (например, при увеличении потребности в крутящем моменте для поддержания вращения ротора 46), может быть использован для планирования профилактического обслуживания ротационного IPX 40, что позволит снизить затраты на техническое обслуживание и ремонт, связанные с работой ротационного IPX 40. В некоторых вариантах выполнения контроллер 110 может отображать первый индикатор (например, зеленый свет) для обозначения работы ротационного IPX 40 в пределах желательных пороговых значений, и отображать второй индикатор (например, красный свет) для обозначения работы за пределами желательных пороговых значений. Кроме того, контроллер 110 может отображать скорость ротора 46 на дисплее контроллера. В некоторых вариантах выполнения контроллер 110 может активировать аварийный или другой индикатор при снижении скорости ротора 46 ниже первого порогового значения, если требуются высокие уровни крутящего момента для поддержания вращения, если превышено второе пороговое значение, обнаружена тенденции к снижению скорости, обнаружена тенденция к увеличению скорости, обнаружено быстрое изменение скорости или сочетание вышеуказанного, чтобы оператор смог принять адекватные меры. В некоторых вариантах выполнения контроллер 110 может автоматически принимать соответствующие меры, если скорость ротора 46 выходит за пределы или приближается к выбранному пороговому значению. Действие, выполняемое оператором или контроллером 110, может различаться в зависимости от типа отклонения скорости, например, в зависимости от того, является ли изменение постепенным или резким. В некоторых вариантах выполнения контроллер 110 может контролировать другие параметры, указывающие на скорость ротора 46, чтобы определить нужное управляющее действие.
На Фиг. 9 представлен поперечный разрез варианта ротационного IPX 40 и двигательной системы 12, выполненный по линии 8-8 с Фиг. 7. В варианте, показанном на Фиг. 9, двигательная система 12 представляет собой электромотор с постоянными магнитами 160, расположенными по окружности вокруг ротора 46, которые взаимодействуют с электромагнитами 162 (например, обмотками статора) на наружной поверхности 180 корпуса 100. В некоторых вариантах осуществления наружная поверхность 180 ротационного IPX 40 может включать в себя постоянные магниты 160, а ротор 46 может включать в себя электромагниты 162, а в других вариантах наружная поверхность 180 ротационного IPX 40 и ротор 46 могут иметь электромагниты 162. В некоторых вариантах ротор 46 может быть изготовлен из магнитного материала, что позволяет всему ротору 46 взаимодействовать с электромагнитами 162. Соединяя электромагниты 162 с наружной поверхностью 180 ротационного IPX 40, двигательная система 12 защищает электромагниты 162 от флюида, текущего через ротационный IPX 40. Более того, при установке электромагнитов 162 на наружной поверхности 180 ротационного IPX 40, двигательная система 12 облегчает доступ к электромагнитам 162 при проведении технического обслуживания и проверок. Как было сказано выше, во время работы контроллер 110 управляет подачей энергии на электромагниты 162 для поддержания вращения ротора 46, позволяя ротору 46 измельчать твердые частицы, поддерживать определенную рабочую скорость, контролировать перемешивание флюидов внутри ротационного IPX 40 или приводить в действие ротационный IPX 40 при использовании высоковязких флюидов или флюидов, содержащих твердые частицы.
На Фиг. 10 представлен поперечный разрез варианта выполнения ротационного IPX 40 и двигательной системы 12, выполненный по линии 8-8 с Фиг. 7. В представленном варианте ротационный IPX 40 может не иметь гильзы 44; вместо этого для обеспечения вращения ротора 46 может быть использована центральная несущая опора 190 (например, вал). В частности, центральная опора 190 прикрепляется к торцевым крышкам 64, 66 и содержит один или несколько постоянных магнитов и/или электромагнитов 162 (например, 1, 2, 3, 4, 5 или более). Таким образом, уменьшение расстояния между постоянным магнитом (магнитами) и/или электромагнитом (электромагнитами) 162 и между постоянным магнитом (магнитами) и/или электромагнитом (электромагнитами) 160 в роторе 46 повышает эффективность индуктивной связи между постоянным магнитом и/или электромагнитом 162 и ротором 46 (например, если он полностью или частично изготовлен из магнитного материала) или постоянным магнитом (магнитами) и/или электромагнитом (электромагнитами) 160 в роторе 46. Как показано на рисунке, при установке постоянного магнита (магнитов) и/или электромагнита (электромагнитов) 162 внутри центральной опоры 190 ротационный IPX 40 блокирует контакт между потоком флюида и постоянным магнитом (магнитами) и/или электромагнитом (электромагнитами) 162. Как объяснялось выше, во время работы контроллер 110 контролирует подачу питания на электромагниты 160 и/или 162 для запуска вращения ротора 46, позволяя ротору 46 проворачиваться сквозь твердые частицы, поддерживать определенную рабочую скорость, контролировать перемешивание флюидов внутри ротационного IPX 40 или запускать систему ротационного IPX 40 с высоковязкими флюидами или флюидами, нагруженными твердыми частицами (например, жидкостями разрыва).
На Фиг. 11 представлен вид сбоку варианта двигательной системы 12, способной одновременно приводить в действие несколько ротационных IPX 40. Например, каждый ротационный IPX 40 может иметь соответствующий вал 198, соединенный с ротором 46. Валы 198, в свою очередь, соединены с валом 98 двигательной системы 12 с помощью соединителей 200 (например, ремней, цепей и т.д.). Во время работы двигательная система 12 передает крутящий момент от вала 98 на каждый ротационный IPX 40, приводя в движение несколько ротационных IPX 40 с помощью одной двигательной системы 12. В настоящем варианте осуществления к двигательной системе 12 присоединено два ротационных IPX 40. Однако в некоторых вариантах осуществления к двигательной системе 12 может быть присоединено 1, 2, 3, 5, 10, 15 и более ротационных IPX 40. Например, ротационные IPX 40 могут быть расположены по окружности вокруг ротора, что позволит соединить несколько ротационных IPX 40 с одной двигательной системой 12.
В некоторых вариантах выполнения ротационные IPX 40 могут содержать муфты 202, которые выборочно начинают и прекращают поступление крутящего момента от двигательной системы 12. Например, контроллер 110 может принимать сигналы обратной связи от датчиков 112, свидетельствующие о том, что один или несколько ротационных IPX 40 замедляются (например, не способны измельчить твердые частицы). Соответственно контроллер 110 может сцепить соответствующие муфты 202, обеспечивая передачу энергии вращения от двигательной системы 12 на соответствующий ротационный IPX (или несколько IPX) 40. Как было сказано выше, контроллер 110 управляет тем, когда, сколько и в течение какого времени двигатель приводит во вращение ротационные IPX 40.
Контроллер 110 может управлять двигателем на основании сигналов обратной связи от датчиков одного ротационного IPX или нескольких ротационных IPX 40. Например, контроллер 110 может запускать двигательную систему 12, когда один ротационный IPX не способен измельчить твердые частицы, поддерживать определенную рабочую скорость, контролировать перемешивание флюидов внутри ротационного IPX 40. Однако в других вариантах осуществления контроллер 110 может запускать двигательную систему 12 только в тех случаях, когда более одного ротационного IPX 40 нуждается в передаче дополнительной мощности.
На Фиг. 12 представлен поперечный разрез варианта двигательной системы 12 (например, гидравлического мотора), соединенной с ротационным IPX 40. Двигательная система 12 облегчает работу ротационного IPX 40 за счет передачи крутящего момента для измельчения твердых частиц, поддержания рабочей скорости ротационного IPX 40, контроля перемешивания флюидов внутри ротационного IPX 40 или запуска ротационного IPX 40 при использовании высоковязких флюидов или флюидов, содержащих твердые частицы. Например, гидравлическая двигательная система 12 может включать в себя гидравлическую турбину 220, соединенную с ротационным IPX 40 с валом 98. Во время работы в двигательную систему 12 поступает поток флюида (например, поток флюида высокого давления без проппанта) из источника 222, что приводит к вращению гидравлической турбины 220, и, следовательно, вала 98. Источник 222 может быть также источником флюида, который используется для работы ротационного IPX 40, или другим источником флюида. Когда вал 98 вращается, он вращает ротор 46. В некоторых вариантах контроллер 110 может управлять клапаном 224 так, чтобы управлять потоком флюида через гидравлическую турбину 220. Например, когда контроллер 110 принимает сигналы обратной связи от датчиков 112 (например, датчиков расхода, датчиков давления, датчиков крутящего момента, датчиков частоты вращения, звуковых датчиков, магнитных датчиков, оптических датчиков и т.д.), процессор 114 исполняет энергонезависимые компьютерные инструкции, хранящиеся на запоминающем устройстве 116 для управления открыванием и закрыванием клапана 224, таким образом запуская и останавливая гидравлическую турбину 220.
Некоторые варианты осуществления изобретения приведены в качестве примера на чертежах и подробно описаны в настоящем документе, хотя в настоящее изобретение могут быть внесены различные изменения, и оно может быть реализовано в альтернативных формах. Однако следует понимать, что настоящее изобретение не ограничивается конкретными раскрытыми формами. Напротив, без отступления от сущности и объема настоящего изобретения в него могут быть внесены различные модификации, а также созданы эквивалентные и альтернативные варианты осуществления, как указано в следующих пунктах формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБМЕНА ДАВЛЕНИЯ С ДВИГАТЕЛЬНОЙ СИСТЕМОЙ | 2015 |
|
RU2654803C2 |
| СИСТЕМЫ ОБЩЕГО КОЛЛЕКТОРА С ВСТРОЕННЫМИ ГИДРАВЛИЧЕСКИМИ СИСТЕМАМИ ПЕРЕДАЧИ ЭНЕРГИИ | 2015 |
|
RU2668629C1 |
| СИСТЕМА УЛУЧШЕННОЙ ПЕРЕДАЧИ ДАВЛЕНИЯ В ТРУБОПРОВОДЕ В СИСТЕМЕ ОБМЕНА ДАВЛЕНИЯ | 2015 |
|
RU2659646C1 |
| СИСТЕМА НА ОСНОВЕ РОТАЦИОННОГО ИЗОБАРИЧЕСКОГО ОБМЕННИКА ДАВЛЕНИЯ С СИСТЕМОЙ СМАЗЫВАНИЯ | 2014 |
|
RU2651108C2 |
| СИСТЕМА И СПОСОБ ИСПОЛЬЗОВАНИЯ ИНТЕГРИРОВАННОГО КОЛЛЕКТОРА ОБМЕНА ДАВЛЕНИЯ ПРИ ГИДРАВЛИЧЕСКОМ РАЗРЫВЕ ПЛАСТА | 2015 |
|
RU2648136C1 |
| СИСТЕМА ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА С СИСТЕМОЙ ПЕРЕДАЧИ ГИДРАВЛИЧЕСКОЙ ЭНЕРГИИ | 2014 |
|
RU2642191C2 |
| ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2361066C2 |
| ПОВЫШЕНИЕ КРУТЯЩЕГО МОМЕНТА ПРИВОДА ЭЛЕКТРОДВИГАТЕЛЯ И СИСТЕМА УПРАВЛЕНИЯ РОТОРНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ | 2013 |
|
RU2636984C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2647177C2 |
| Система добычи углеводородов и соответствующий способ | 2016 |
|
RU2718633C2 |
Группа изобретений относится к нефтегазовой промышленности, в частности, к оборудованию и технологиям для осуществления гидравлического разрыва грунта. Система обмена давления, включает в себя ротационный изобарический обменник давления (IPX), выполненный с возможностью обмена давления между первым флюидом и вторым флюидом, а также двигательную систему, соединенную с IPX и выполненную с возможностью приводить в действие IPX. Двигательная система содержит электромотор, имеющий первые постоянные магниты или первые электромагниты на роторе IPX, выполненные с возможностью взаимодействия со вторыми постоянными магнитами или вторыми электромагнитами. Вторые электромагниты соединены с валом, проходящим через ротор. Изобретения позволяют нагнетать в скважину жидкость гидроразрыва, предотвращая или ограничивая износ насосов высокого давления. 2 н. и 8 з.п. ф-лы, 12 ил.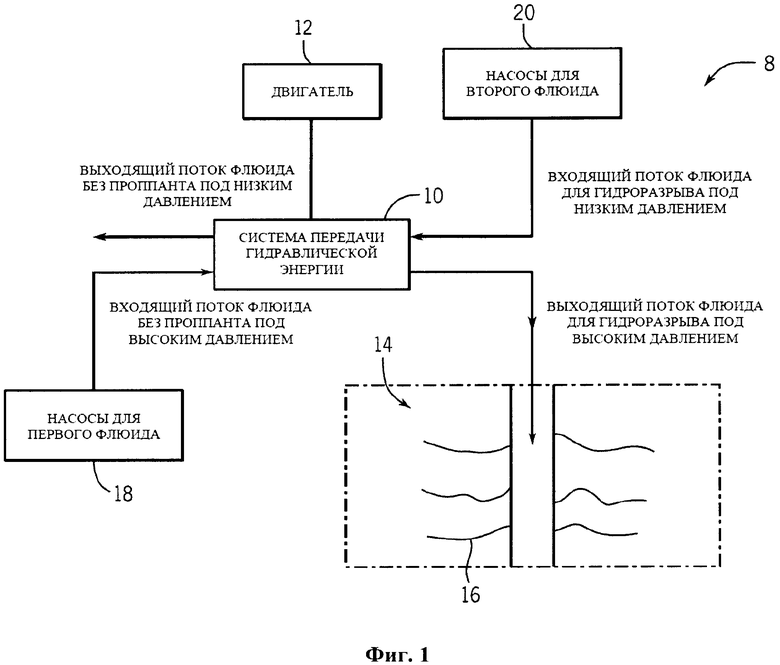
1. Система обмена давления, содержащая:
ротационный изобарический обменник давления (IPX), выполненный с возможностью обмена давления между первым флюидом и вторым флюидом;
двигательную систему, соединенную с ротационным IPX и выполненную с возможностью приводить в действие ротационный IPX, причем двигательная система содержит электромотор, имеющий первые постоянные магниты или первые электромагниты на роторе ротационного IPX, выполненные с возможностью взаимодействия со вторыми постоянными магнитами или вторыми электромагнитами, где вторые постоянные магниты или вторые электромагниты соединены с валом, проходящим через ротор.
2. Система по п. 1, в которой первый флюид представляет собой жидкость без твердых частиц, а второй флюид представляет собой жидкость с твердыми частицами.
3. Система по п. 1, которая содержит контроллер с одним или несколькими режимами работы, выполненный с возможностью управлять двигательной системой, причем один или несколько режимов работы включают в себя режим запуска, режим регулировки скорости, режим непрерывной подачи энергии и/или режим периодической подачи энергии.
4. Система по п. 1, в которой в качестве вала использована центральная несущая опора ротационного IPX.
5. Система по п. 4, в которой вторые постоянные магниты или вторые электромагниты расположены в центральной несущей опоре.
6. Система по п. 5, в которой центральная несущая опора прикреплена к торцевым крышкам ротационного IPX.
7. Система по п. 1, которая использована в системе гидроразрыва, компонентами которой являются ротационный IPX и двигательная система.
8. Способ эксплуатации системы обмена давления по п. 1, в котором: контролируют вращение ротора в ротационном изобарическом обменнике давления (IPX);
обнаруживают условия, когда скорость вращения ротора выходит за пределы допустимого диапазона, и
при обнаружении данного состояния эксплуатируют двигательную систему, соединенную с ротационным IPX и содержащую электромотор, имеющий первые постоянные магниты или первые электромагниты на роторе ротационного IPX, выполненные с возможностью взаимодействия со вторыми постоянными магнитами или вторыми электромагнитами, где вторые постоянные магниты или вторые электромагниты соединены с валом, проходящим через ротор.
9. Способ по п. 8, в котором при контроле скорости вращения ротора с помощью контроллера отслеживают показания датчика расхода, датчика давления, датчика крутящего момента, датчика частоты вращения, звукового датчика, магнитного датчика или оптического датчика.
10. Способ по п. 8, в котором при эксплуатации двигательной системы на основании обнаруженного состояния выбирают один или несколько режимов работы, включая режим запуска, режим регулировки скорости, режим непрерывной подачи энергии и/или режим периодической подачи энергии.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 2010014997 A1, 21.01.2010 | |||
| CN 101865191 A, 20.10.2010 | |||
| RU 2004856 C1, 15.12.1993. | |||

