Область техники, к которой относится изобретение
Изобретение относятся к способу и системе для определения расстояния от оси прицепа до дышла.
Уровень техники
В различных ситуациях (переезд, перевозка грузов или транспортировка дома на колесах) прицепы часто накидывают на сцепное устройство транспортного средства. Эти прицепы имеют различные формы и размеры, а также отличаются по весу и грузоподъемности. Поскольку современные транспортные средства оснащены компьютеризированными системами и модулями, способными модифицировать поведение транспортного средства на дороге, если эти системы будут иметь определенные данные о прицепе, они смогут обеспечить лучшую управляемость громоздким прицепом.
Например, для транспортного средства может быть полезным, если известна длина прицепа от оси до дышла. Разумеется, для получения этой информации можно просто измерить расстояние с помощью измерительной ленты, однако она не всегда может иметься под рукой. Кроме того, владельцу прицепа может быть непонятно, от какой точки нужно производить измерение, что может привести к затруднениям или получению неверных данных.
Раскрытие изобретения
Предложена система для оценки расстояния от оси прицепа до дышла, которая включает в себя процессор, выполненный с возможностью принимать изображение прицепа. Процессор также выполнен с возможностью по изображению прицепа идентифицировать ось и конечную часть дышла. Кроме того, процессор выполнен с возможностью принимать изображение шины, включая указанное на ней значение диаметра колеса. Кроме того, процессор способен определять диаметр колеса по изображению шины. Процессор также выполнен с возможностью идентифицировать колесо, имеющее определенный диаметр, соответствующий диаметру колеса из первого изображения. На основании идентифицированного диаметра процессор может рассчитывать расстояние от оси до конечной части дышла.
Инструкции, выполняемые процессором, могут быть сохранены в энергонезависимом машиночитаемом носителе данных.
Краткое описание чертежей
На Фиг.1 изображена блок-схема вычислительной системы транспортного средства.
На Фиг.2 представлена логическая схема примера процедуры обработки изображения.
На Фиг.3 представлена логическая схема примера процедуры коррекции изображения.
На Фиг.4А и Фиг.4В изображены примеры изображений частей прицепа.
На Фиг.5 представлен пример отображения присоединенного прицепа.
Осуществление изобретения
Далее представлено описание вариантов реализации настоящего изобретения, однако эти варианты приведены в качестве примера, и необходимо учитывать, что изобретение может быть реализовано в других альтернативных формах. Фигуры не обязательно выполнены в масштабе, некоторые элементы могут быть увеличены или уменьшены для детального отображения соответствующих компонентов. Следовательно, раскрытые в данном документе конкретные конструкционные и функциональные подробности не следует рассматривать в ограничительном смысле, а только как наглядный пример для ознакомления с вариантом реализации изобретения.
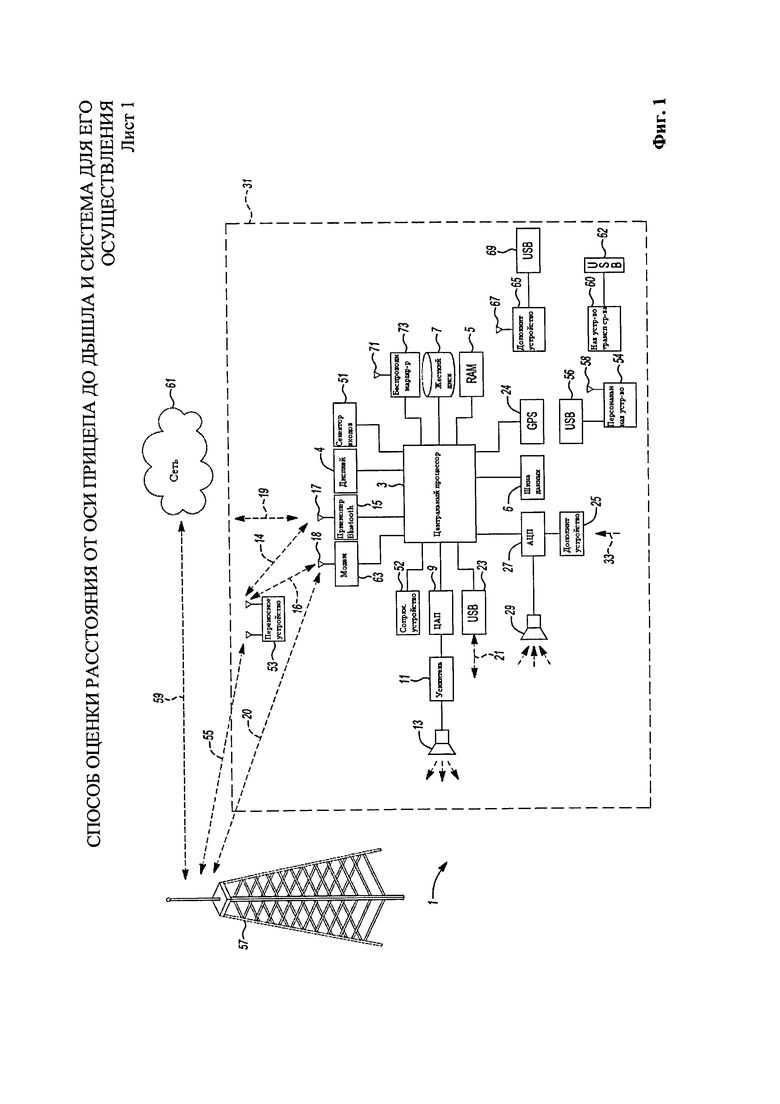
На Фиг.1 представлена примерная блок-схема автомобильной вычислительной системы 1 (VCS) для транспортного средства 31. Примером такой вычислительной системы 1 является система SYNC, разработанная компанией «THE FORD MOTOR COMPANY». Транспортное средство, оснащенное автомобильной вычислительной системой, может иметь входной графический интерфейс 4, расположенный в транспортном средстве. Пользователь также может иметь возможность взаимодействия с интерфейсом, например, если он оснащен сенсорным дисплеем. В другом варианте взаимодействие может осуществляться с помощью нажатия кнопок, обычной речи или синтеза речи.
В первом варианте, изображенном на Фиг.1, по меньшей мере некоторой частью работы автомобильной вычислительной системы управляет процессор 3. Предусмотренный в транспортном средстве процессор позволяет выполнять обработку команд и процедур. Кроме того, процессор соединен с временной памятью 5 и постоянной энергонезависимой памятью 7. В данном варианте временной памятью является оперативное запоминающее устройство (RAM), а постоянной энергонезависимой памятью является жесткий диск (HDD) или флеш-память.
Процессор также имеет несколько различных входов, позволяя пользователю взаимодействовать с процессором. В данном варианте предусмотрен микрофон 29, внешний вход 25 (для входных сигналов 33), USB-вход 23, GPS-вход 24 и BLUETOOTH-вход 15. Также имеется переключатель 51 входов, позволяющий пользователю выбирать между различными входами. Перед передачей в процессор входной сигнал от микрофона и внешнего разъема преобразуется из аналогового вида в цифровой с помощью преобразователя 27. Несмотря на то что это не показано на схеме, ряд компонентов транспортного средства и вспомогательных компонентов, соединенных с системой VCS, может использовать сеть транспортного средства (неограничивающим примером может являться шина CAN) для передачи данных от системы VCS (или ее компонентов) и к ней.
Выходные сигналы для системы могут включать в себя, помимо прочего, сигналы графического дисплея 4 и динамика 13, либо выходные сигналы стереосистемы. Динамик подключен к усилителю 11 и принимает сигнал от процессора 3 через цифроаналоговый преобразователь 9. Выходной сигнал может быть также передан на удаленное BLUETOOTH-устройство, например, персональное навигационное устройство (PND) 54 или такое USB-устройство, как навигационное устройство 60 транспортного средства, по двунаправленным каналам передачи данных, обозначенным позициями 19 и 21 соответственно.
В одном примере система 1 применяет BLUETOOTH-приемопередатчик 15 для осуществления связи 17 с переносным устройством пользователя (например, сотовый телефон, смартфон, КПК или любое другое устройство с возможностью подключения к беспроводной сети). Переносное устройство также можно использовать для связи 59 с сетью 61 за пределами транспортного средства 31, например, по каналу 55 связи с вышкой 57 сотовой связи. В некоторых вариантах вышка 57 сотовой связи может быть точкой доступа к WiFi-сети.
Связь между переносным устройством и BLUETOOTH-приемопередатчиком показана сигналом 14.
Сопряжение переносного устройства 53 и BLUETOOTH-приемопередатчика 15 может быть осуществлено с помощью кнопки 52 или аналогичного устройства ввода. Таким образом, центральному процессору (CPU) дается команда на сопряжение бортового BLUETOOTH-приемопередатчика с BLUETOOTH-приемопередатчиком в переносном устройстве.
Передача данных может осуществляться между CPU 3 и сетью 61, например, с использованием тарифного плана, голосовой передачи данных, либо двухтональных сигналов (DTMF), связанных с переносным устройством 53. В ином случае может быть эффективно использование дополнительного бортового модема 63 с антенной 18 для создания связи 16 между CPU 3 и сетью 61 в надтональном диапазоне. Переносное устройство 53 также можно использовать для связи 59 с сетью 61 за пределами транспортного средства 31, например, с помощью канала 55 связи с вышкой 57 сотовой связи. В некоторых вариантах для передачи данных по сети 61 модем 63 может устанавливать связь 20 с вышкой 57 сотовой связи. В качестве неограничивающего примера в качестве модема 63 может быть использован сотовый USB-модем, а связь 20 может быть сотовой связью.
В одном иллюстративном примере процессор имеет операционную систему с интерфейсом прикладного программирования (API) для связи с прикладной программой модема. Прикладная программа модема может иметь доступ к встроенному модулю или аппаратным средствам на BLUETOOTH-приемопередатчике для обеспечения полностью беспроводной связи с удаленным BLUETOOTH-приемопередатчиком (например, в переносном устройстве). Bluetooth является разновидностью протоколов IEEE 802 PAN (персональная сеть). Протоколы IEEE 802 LAN (локальная сеть) включают в себя WiFi и имеют общую функциональность с протоколами IEEE 802 PAN. Все они подходят для беспроводной связи внутри транспортного средства. Другими средствами связи, которые можно использовать в данной области, являются атмосферная оптическая связь (например, IrDA), а также нестандартизованные пользовательские IR-протоколы.
В другом варианте переносное устройство 53 включает в себя модем для речевого диапазона или широкополосной связи. В варианте с передачей данных по голосовому каналу может быть применен способ, известный как мультиплексирование с разделением частот, когда пользователь переносного устройства может разговаривать по нему, и одновременно будет осуществляться передача данных. В других случаях, когда пользователь не использует устройство, передача данных может осуществляться во всем диапазоне частот (например, 300 Гц - 3,4 кГц). При этом если мультиплексирование с разделением частот является общим для аналоговой сотовой связи между транспортным средством и сетью Интернет и продолжает использоваться, то для цифровой сотовой связи их можно заменить технологией множественного доступа с кодовым разделением (CDMA), множественного доступа с разделением по времени (TDMA), множественного доступа с пространственным разделением (SDMA). Данные стандарты совместимы с ITU IMT-2000 (3G) и обеспечивают скорость обмена данными до 2 Мб/с для пользователей, стоящих на месте или передвигающихся пешком, и 385 кб/с для пользователей в движущемся транспортном средстве. Стандарты 3G сейчас заменяются технологией IMT-Advanced (4G), которая обеспечивает скорость 100 Мб/с для пользователей в транспортном средстве и 1 Гб/с для пользователей, стоящих на месте. Если пользователь имеет тарифный план для переносного устройства, то данный тариф может позволить осуществить широкополосную связь, а система могла бы использовать более широкий диапазон частот (увеличивая скорость передачи данных). В другом варианте переносное устройство 53 может быть заменено сотовым телефоном (не показан), установленным в транспортном средстве 31. В другом варианте, переносное устройство 53 может быть устройством с доступом к беспроводной локальной сети (WLAN), способным осуществлять связь, например (помимо прочего), через сеть 802.11 g (то есть, WiFi) или сеть WiMax.
В еще одном варианте входные данные могут проходить на внутренний процессор 3 транспортного средства через переносное устройство, с использованием технологии передачи данных поверх речи или тарифный план, или через бортовой BLUETOOTH-приемопередатчик. Например, при наличии каких-либо временных данных они могут храниться на HDD или другом носителе 7, пока не перестанут быть нужны.
Дополнительные источники, которые могут взаимодействовать с транспортным средством, включают в себя персональное навигационное устройство 54, например, с USB-соединением 56 и/или антенной 58; навигационное устройство 60 транспортного средства с USB-соединением 62 или другим соединением; а также бортовое GPS-устройство 24, либо удаленную навигационную систему (не показана) с подключением к сети 61. USB представляет собой один из классов последовательных сетевых протоколов. Последовательные протоколы IEEE 1394 (firewire), EIA (Electronics Industry Association), IEEE 1284 (Centronics Port), S/PDIF (Sony/Philips Digital Interconnect Format) и USB-IF (USB Implementers Forum) являются основными стандартами, используемыми для последовательного соединения двух устройств. Большинство протоколов может быть использовано либо для электрической, либо для оптической связи.
Кроме того, центральный процессор может быть связан с различными другими дополнительными устройствами 65. Эти устройства могут быть соединены с помощью беспроводной связи 67 или проводной связи 69. Дополнительное устройство 65 может включать в себя, помимо прочего, персональные медиа-плееры, беспроводные медицинские устройства, портативные компьютеры и т.п.
Кроме того, центральный процессор может быть соединен с мобильным беспроводным маршрутизатором 73 транспортного средства, например, использующим WiFi-приемопередатчик 71. Это может позволить центральному процессору подключиться к удаленным сетям, находящимся в радиусе действия локального маршрутизатора 73.
В дополнение к описанным примерам процессов, выполняемых автомобильной вычислительной системой, расположенной в транспортном средстве, в некоторых вариантах описанные процессы могут быть выполнены вычислительной системой, подключенной к автомобильной вычислительной системе транспортного средства. Такая система может включать в себя, помимо прочего, беспроводное устройство (неограничивающим примером может являться мобильный телефон) или удаленную вычислительную систему (неограничивающим примером может являться сервер), подключенную через беспроводное устройство. Все эти системы могут быть обозначены как связанные с автомобилем вычислительные системы (VACS). В некоторых вариантах конкретные компоненты системы VACS могут выполнять определенные части процесса, в зависимости от реализации конкретной системы. В качестве неограничивающего примера, если процесс предусматривает передачу или прием информации с участием сопряженного беспроводного устройства, то вероятно, что оно не является выполняющим, поскольку беспроводное устройство не может осуществлять «прием и передачу» информации само по себе. Специалистам в данной области техники понятно, когда в данном решении применять конкретные системы VACS нецелесообразно. Во всех решениях предполагается, что, по меньшей мере, автомобильная вычислительная система (VCS), расположенная в транспортном средстве, способна самостоятельно выполнять описанные процессы.
В то время как пользователь прицепа может не иметь измерительной ленты, либо он может не обладать информацией о том, как правильно выполнить измерения, а также учитывая распространенность телефонов, оборудованных камерами, более вероятно, что у пользователя будет в наличии телефон с камерой. Также вероятно, что пользователь знает, как использовать камеру в телефоне в качестве автономного приложения или совместно с приложением, предусмотренным согласно изобретению.
Сфотографировав прицеп, пользователь может передать изображение приложению, разработанному для определения расстояния по изображению, для выполнения соответствующих расчетов. Кроме того, поскольку пользователь не может быть уверен в размере покрышки, фотография, полученная при хорошем освещении, может предоставить приложению информацию для определения расстояния на основании первого изображения.
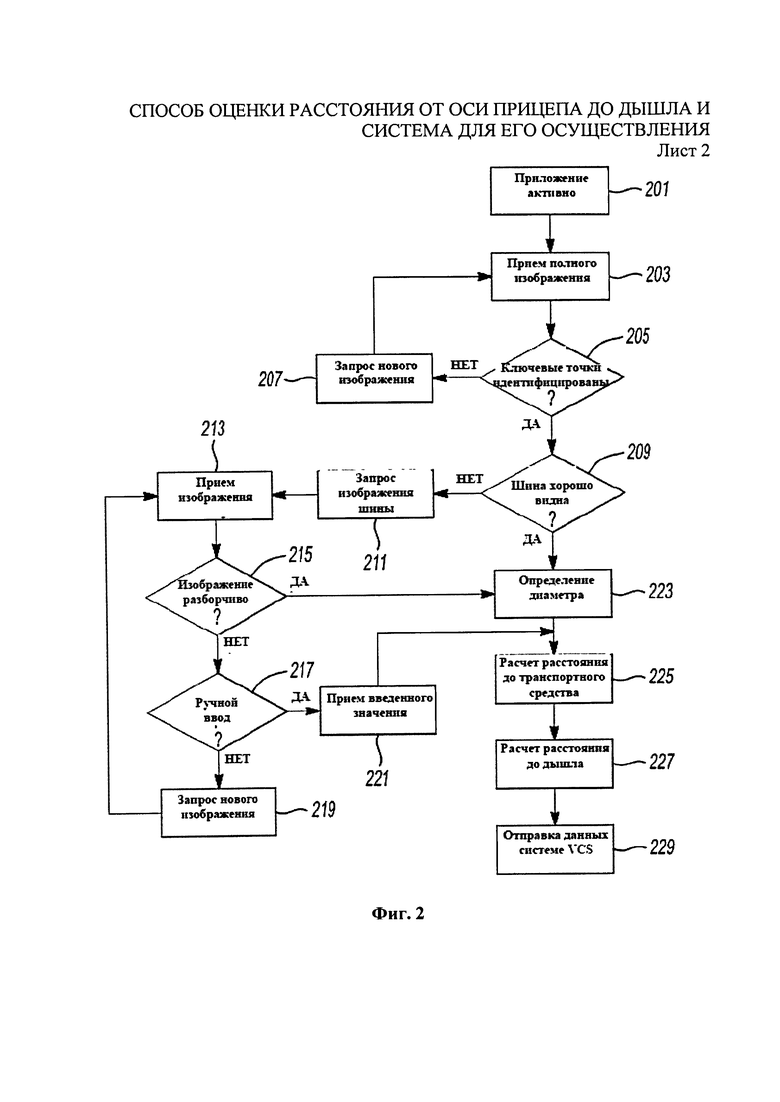
На Фиг.2 представлен пример процедуры обработки изображения. В данном варианте пользователю транспортного средства было предоставлено приложение для использования на смартфоне или другом переносном устройстве с камерой. Данное приложение предоставляет пользователю необходимые инструкции и доступ к необходимым функциональным возможностям. Обработка изображения может быть выполнена автомобильной вычислительной системой, хотя в данном примере описанный процесс может выполняться на переносном устройстве.
После запуска приложения на этапе 201 пользователю может поступить запрос на получение изображения прицепа целиком, либо, по крайней мере, оси прицепа и дышла (то есть его конечной части). На этапе 203 система получает полное изображение сразу же после выполнения снимка пользователем. В данном примере графический процессор предпримет попытку определить расстояние между концом дышла и осью, поскольку это будет полезно для улучшения управления прицепом, когда транспортное средство находится на трассе. Таким образом, на этапе 205 выполняется проверка изображения на наличие обеих точек измерения (центр оси и конец дышла).
Из-за плохого освещения, низкого качества изображения, ржавчины и выцветания, смещения центра изображения и других потенциальных проблем, система может быть неспособна распознать ось и конец дышла. В этом случае на этапе 207 запрашивается новое изображение, пока требуемые характеристики не будут обеспечены. В других примерах, если выполнение данных циклов определения по изображению будет невозможно, потребуется помощь пользователя для определения этих признаков. Такая помощь пользователя описана более подробно со ссылкой на Фиг.3.
Кроме того, для определения по изображению других расстояний используется диаметр колеса. Поскольку пользователь может не знать диаметр колеса, для получения нужной информации можно использовать изображение наружной части шины. В данном примере на этапе 209 проверяют, можно ли считать с наружной части шины соответствующую маркировку для определения диаметра колеса.
Если изображение нечеткое или не читаемо (что может быть распространенной проблемой на определенном расстоянии, с которого был сделан снимок), на этапе 211 поступает запрос приблизить маркировку на шине. На этапе 213 изображение снято и принято в обработку, после чего на этапе 215 определяется, четко ли видно маркировку. Если маркировка не разборчива, то на этапе 217 может быть запрошен ручной ввод диаметра колеса пользователем.
Поскольку существует возможность того, что маркировка на шине изношена или каким-либо образом испорчена, определить диаметр может не получиться, вне зависимости от количества сделанных фотографий. В данном случае на этапе 221 может быть полезным ручной ввод диаметра колеса. В противном случае, если маркировка все же имеется, можно сделать новое изображение с более четкой маркировкой и на этапе 219 передать его, чтобы оно могло быть использовано при дальнейшей обработке на этапе 223.
На этапе 223 может быть распознана маркировка (разборчивая) и определен диаметр колеса. После того, как диаметр становится известен, исходное изображение может быть проверено и определено расстояние между двумя радиально противоположными точками. Данное расстояние (то есть диаметр), как показано на изображении, может быть использовано для определения масштаба для последующего расчета расстояния от центра оси до конца дышла прицепа на этапах 225, 227. Данная информация может быть передана автомобильной вычислительной системе для последующего использования при управлении прицепом во время движения.
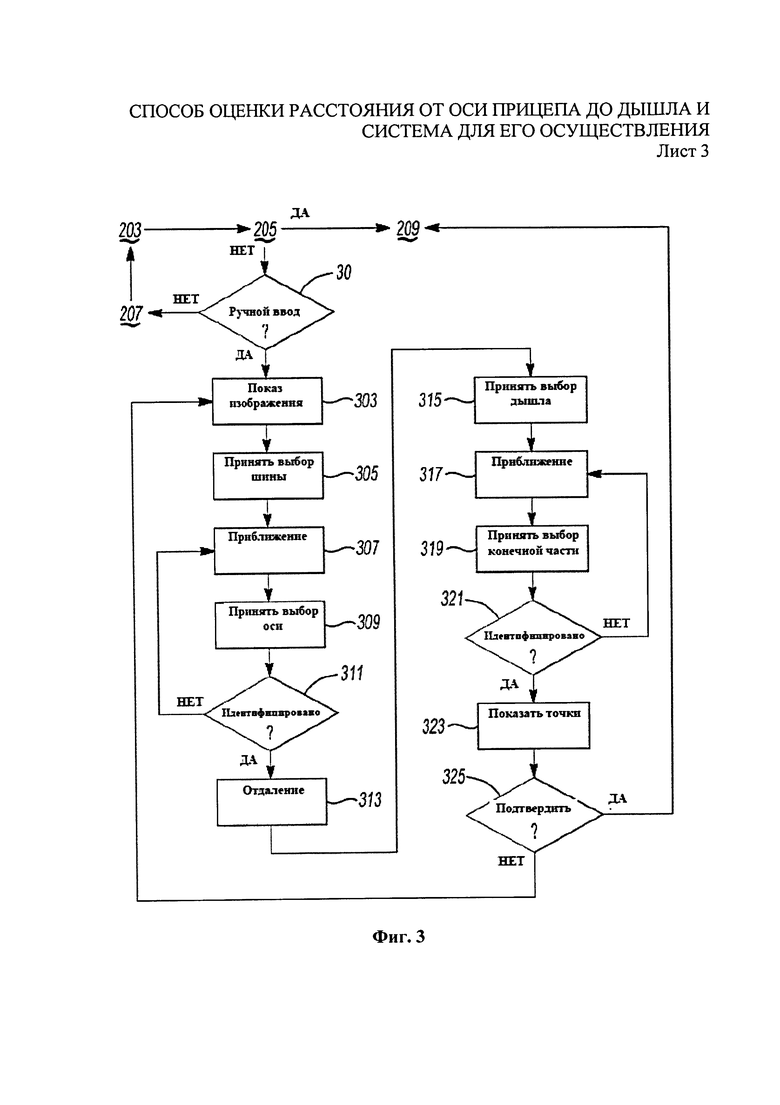
На Фиг.3 представлен пример процедуры коррекции изображения. В данном примере пользователь вручную определяет центр оси и конечную часть дышла, что может быть необходимо, если система не может выполнить определение точек автоматически. Определение точек может быть выполнено, например, путем нажатия пальцем на изображении центра оси (на приближенном изображении), а также путем выбора конечной части дышла аналогичным образом.
Если изображение не имеет определяемых точек, то на этапе 301 может быть запрошено задание этих точек вручную. В случае выбора данного варианта на этапе 303 пользователю может быть предоставлено первое (полное) изображение. На этом изображении пользователь может выбрать шину, которая может быть использована для идентификации оси. Выбранная на этапе 305 шина на этапе 307 будет отображаться в увеличенном виде. Если ось может быть идентифицирована, то на этапе 309 ее можно выбрать на изображении. Если на этапе 311 обнаружено, что ось и/или ее изображение можно идентифицировать в выбранной области, то можно выполнить дополнительное увеличение.
После выбора оси на этапе 313 изображение уменьшают, а на этапе 315 пользователь выбирает область изображения, в которой находится дышло прицепа. Затем на этапе 317 изображение дышла опять может быть увеличено, и на этапе 319 пользователь сможет выбрать его конечную часть, представляющую собой точку на дышле, наиболее удаленную от оси. Если на этапе 321 определено, что конечная часть может быть идентифицирована после выбора, то на этапе 323 точки могут быть отображены на изображении. На этапе 325 пользователь может подтвердить, что точки точно расположены на требуемых участках изображения.
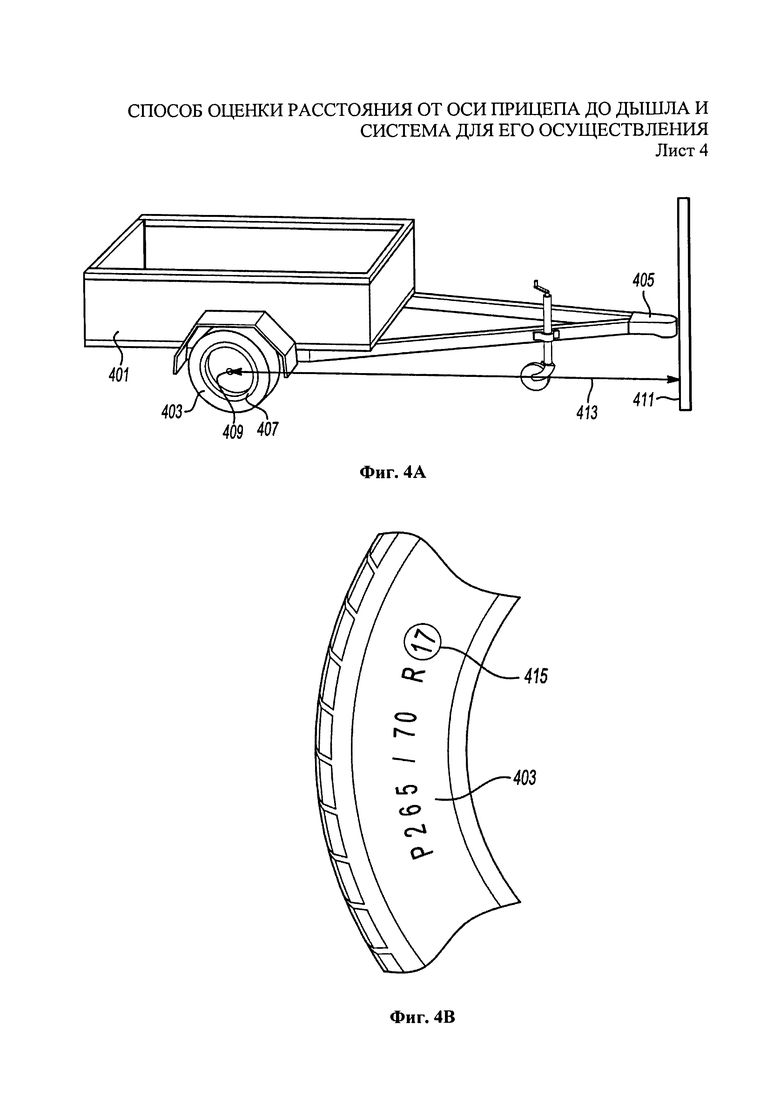
На Фиг.4А и Фиг.4В представлены примеры изображений частей прицепа. Изображение, представленное на Фиг.4А, включает в себя дополнительные идентификаторы, которые соответствуют точкам, указанным пользователем или определенным в автоматическом режиме. Прицеп 401 включает в себя изображение шины 403, ось 409 и дышло 405.
В данном примере система идентифицирует маркировку 407 диаметра колеса и может графически отобразить диаметр так, что пользователь может подтвердить правильность идентификации, то есть правильность выбора диаметра шины или иной точки. Также может быть показана точка, относящаяся к оси 409 и отметка, относящаяся к конечной части 411 прицепа.
Используя представленное расстояние, соответствующее диаметру колеса, можно определить любое другое расстояние между двумя точками на изображении. В частности, можно определить расстояние 413 между центром оси и конечной частью дышла прицепа.
На Фиг.4В представлено увеличенное изображение шины 403. Сбоку на шине имеется маркировка, которая может быть использована для определения размера колеса. В данном примере, последние две цифры 415 маркировки относятся к размеру колеса.
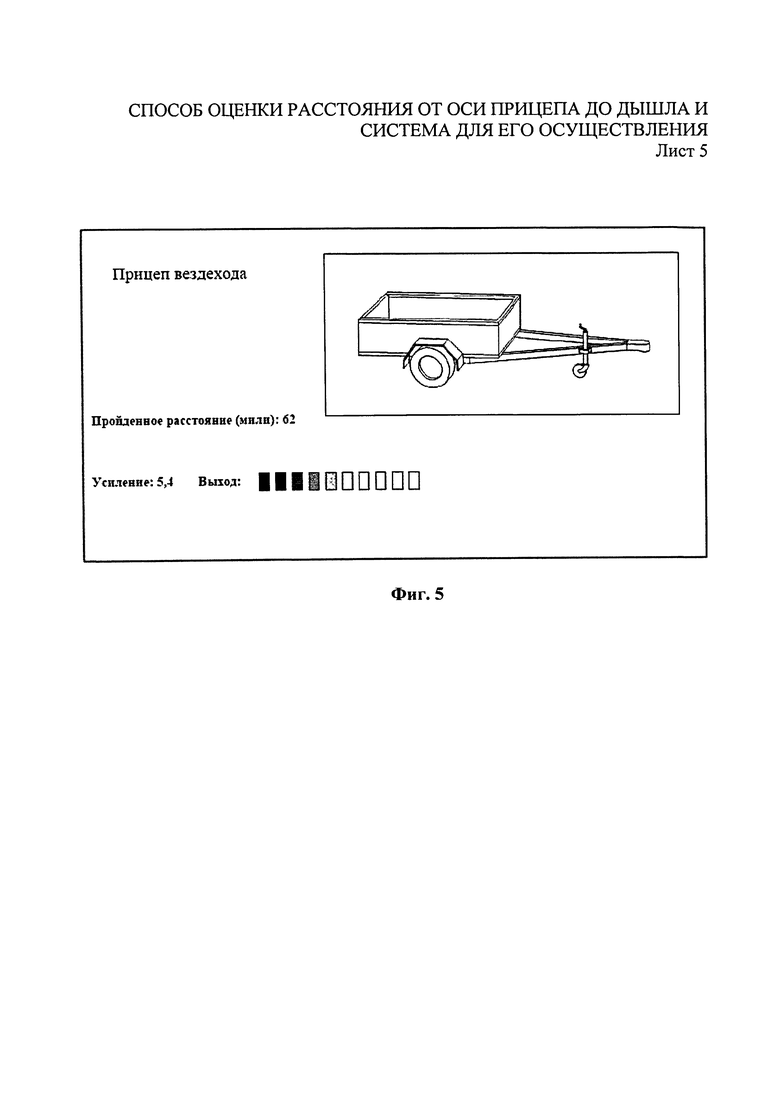
На Фиг.5 представлен пример изображения присоединенного прицепа. На данном изображении, которое может быть выведено на дисплей транспортного средства и/или переносного устройства, может быть указана информация, касающаяся нескольких параметров поездки и идентификаторов прицепа. В данном примере дисплей содержит изображение прицепа. Оно может помочь пользователю идентифицировать конкретный прицеп при наличии нескольких прицепов.
Для сохранения данных о прицепе также может быть использовано название/идентификатор. Система может также отслеживать пройденное расстояние (в милях), а также предоставлять другую информацию по транспортному средству, например, усиление и текущую выходную мощность. Также могут быть предусмотрены и другие желаемые средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОСЛАБЛЕНИЯ ЗВУКА В ТРАНСПОРТНОМ СРЕДСТВЕ ДЛЯ ПРОСЛУШИВАНИЯ УКАЗАНИЙ ОТ МОБИЛЬНЫХ ПРИЛОЖЕНИЙ | 2014 |
|
RU2627127C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИПЕРЛАПС-ВИДЕО И СОЦИАЛЬНЫЕ СЕТИ | 2016 |
|
RU2725843C2 |
| ТАКТИЛЬНЫЙ ВЫВОД В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2703680C1 |
| СИСТЕМЫ И СПОСОБЫ ПОМОЩИ ПРИ ПАРКОВКЕ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2710505C1 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| АНТЕННАЯ СИСТЕМА ДЛЯ ТЕЛЕМАТИЧЕСКОГО БЛОКА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2769941C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ШИНАМИ ТРАНСПОРТНЫХ СРЕДСТВ ЧЕРЕЗ ПЕРСОНАЛЬНЫЕ СЕТИ И СООТВЕТСТВУЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2693366C1 |
| БЕСПРОВОДНАЯ СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ШИН | 2015 |
|
RU2659120C1 |
| ОПОВЕЩЕНИЕ О ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И РЕАГИРОВАНИЕ | 2011 |
|
RU2595631C2 |
| СИСТЕМЫ И СПОСОБЫ РАСШИРЕНИЯ ОБЛАСТИ ПРИМЕНЕНИЯ ТЕЛЕФОНА В КАЧЕСТВЕ КЛЮЧА | 2017 |
|
RU2729661C2 |
Группа изобретений относится к способу и системе для определения расстояния от оси прицепа до дышла. Система для оценки расстояния от оси прицепа до дышла включает в себя процессор, выполненный с возможностью принимать изображение прицепа, идентифицировать на изображении ось прицепа и конец дышла, принимать изображение шины, содержащей маркировку величины диаметра колеса, определять по маркировке диаметр колеса и сопоставлять его с диаметром колеса на изображении прицепа, после чего рассчитывать расстояние от оси до конечной части дышла, используя полученное значение диаметра. Достигается улучшение управляемости прицепом. 2 н. и 12 з.п. ф-лы, 5 ил.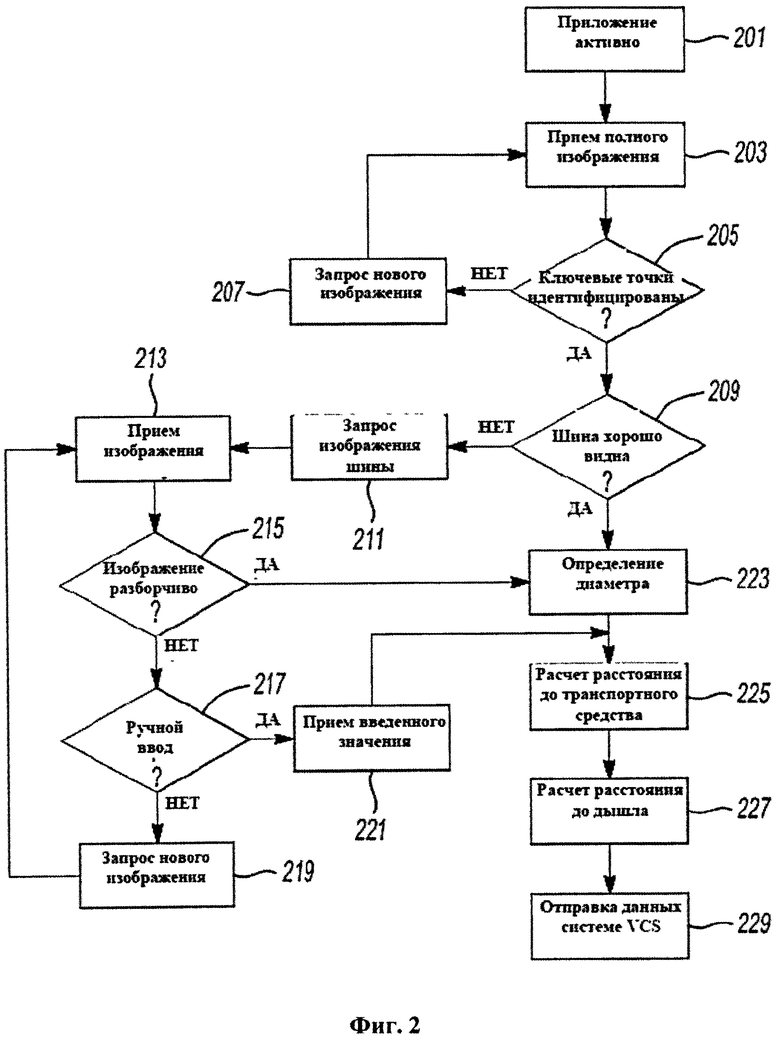
1. Способ оценки расстояния от оси прицепа до дышла, выполняемый компьютером, в котором обеспечивают получение изображения прицепа, выполняют идентификацию оси и конца дышла на изображении прицепа, обеспечивают получение изображения шины, содержащего маркировку о диаметре колеса, определяют по маркировке диаметр колеса, сопоставляют его с диаметром колеса, представленного на изображении прицепа, и рассчитывают расстояние от оси до конечной части дышла, используя полученное значение диаметра.
2. Способ по п.1, для выполнения которого используют процессор сотового телефона.
3. Способ по п.1, для выполнения которого используют процессор автомобильной вычислительной системы.
4. Способ по п.2 или 3, в которой процессор выполнен с возможностью предоставлять рассчитанное расстояние программе управления прицепом.
5. Способ по п.1, в котором идентификацию оси и/или конца дышла выполняют путем нажатия на нужную область на дисплее.
6. Способ по п.1, в котором идентификацию оси, конца дышла и диаметра колеса выполняют автоматически.
7. Способ по п.1, в котором, если установлено, что диаметр колеса не может быть определен по изображению, введение диаметра запрашивают у пользователя.
8. Система для оценки расстояния от оси прицепа до дышла, которая включает в себя процессор, выполненный с возможностью принимать изображение прицепа, идентифицировать на изображении ось прицепа и конец дышла, принимать изображение шины, содержащей маркировку величины диаметра колеса, определять по маркировке диаметр колеса и сопоставлять его с диаметром колеса на изображении прицепа, после чего рассчитывать расстояние от оси до конечной части дышла, используя полученное значение диаметра.
9. Система по п.8, в которой процессор представляет собой компонент сотового телефона.
10. Система по п.8, в которой процессор представляет собой компонент автомобильной вычислительной системы.
11. Система по п.8, в которой процессор выполнен с возможностью предоставлять рассчитанное значение расстояния программе управления прицепом.
12. Система по п.8, в которой идентификация оси или конца дышла может быть выполнена путем нажатия пользователем на нужную область на дисплее.
13. Система по п.8, в которой идентификация оси, конца дышла и диаметра колеса может быть выполнена автоматически.
14. Система по п.8, в которой, если процессор определил, что диаметр колеса не может быть идентифицирован по изображению, процессор может запрашивать у пользователя ручной ввод значения диаметра колеса и принимать введенные данные.
| US 4778060 A, 18.10.1988 | |||
| US 2010324770 A1, 23.12.2010 | |||
| US 2009280859 A1, 12.11.2009 | |||
| US 2005074143 A1, 07.04.2005. |

