Уровень техники
[1] Системы предупреждения о возможном столкновении предоставляют способ для водителей транспортного средства, чтобы корректировать их характер вождения, если может произойти столкновение с другим транспортным средством. Важной частью таких систем может быть предоставление выходного сигнала, указывающего грозящее столкновение, так что водитель может предпринимать действие уклонения. В настоящее время системы могут включать в себя активацию механизмов, которые предоставляют выходные сигналы всем пассажирам транспортного средства, отличным от водителя транспортного средства.
Краткое описание чертежей
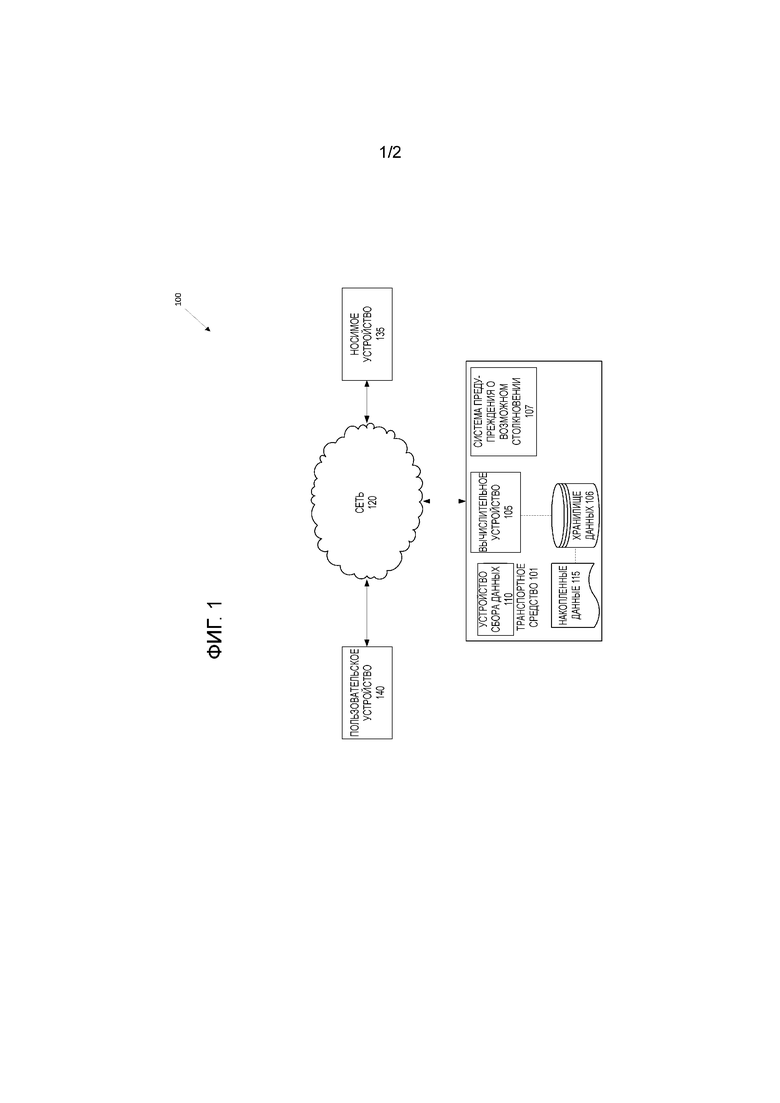
[2] Фиг. 1 - это блок-схема примерной системы для включения в нее носимого устройства, предоставляющего выходные сигналы, указывающие возможное столкновение транспортного средства.
[3] Фиг. 2 - это блок-схема примерного процесса для предоставления указания о возможном столкновении транспортного средства с носимого устройства.
Подробное описание изобретения
[4] Фиг. 1 иллюстрирует примерную систему 100 для предоставления предупреждения носимому устройству. Система 100 включает в себя транспортное средство 101, имеющее вычислительное устройство 105, память и/или другое хранилище 106 данных, систему 107 предупреждения о возможном столкновении, устройства 110 сбора данных и накопленные данные 115. Вычислительное устройство 105 конфигурируется, чтобы принимать информацию, например, накопленные данные 115, от устройств 110 сбора данных, касающиеся различных показателей, относящихся к транспортному средству 101. Например, данные 115 могут включать в себя скорость (т.е., вектор скорости) транспортного средства 101, ускорение и/или замедление транспортного средства 101, данные, относящиеся к пути или рулению транспортного средства 101, биометрические данные, относящиеся к водителю транспортного средства 101, например, сердечный ритм, расширение зрачка, температура тела, состояние сознания и т.д. Дополнительные примеры данных 115 могут включать в себя данные, указывающие, являются ли подсистемы транспортного средства (например, система рулевого управления, система силовой цепи, тормозная система, внутренняя система восприятия, внешняя система восприятия и т.д.) работоспособными, и/или данные 115, относящиеся к состоянию таких подсистем, например, крутящему моменту рулевого колеса, давлению тормоза, крутящему моменту двигателя и т.д. Вычислительное устройство 105 может быть сконфигурировано, чтобы собирать данные 115 от транспортного средства 101, в котором оно установлено, т.е., первое или рассматриваемое транспортное средство, и/или может быть сконфигурировано, чтобы собирать данные 115 от другого транспортного средства 101, например, второго или целевого транспортного средства.
[5] Вычислительное устройство 105, как правило, конфигурируется, т.е., программируется и/или снабжается аппаратными средствами, для обмена данными по шине локальной сети контроллеров (CAN) или т.п. Вычислительное устройство 105 может также иметь соединение с бортовым диагностическим разъемом (OBD-II). Через CAN-шину, OBD-II и/или другие проводные или беспроводные механизмы вычислительное устройство 105 может передавать сообщения различным устройствам в транспортном средстве и/или принимать сообщения от различных устройств, например, контроллеров, актуаторов, датчиков и т.д., включающих в себя устройства 110 сбора данных. Альтернативно или дополнительно, в случаях, когда вычислительное устройство 105 фактически содержит множество устройств, CAN-шина или т.п. может быть использована для связи между устройствами, представленными как вычислительное устройство 105 в этом описании изобретения. Кроме того, вычислительное устройство 105 может быть сконфигурировано для связи с сетью 120, которая, как описано ниже, может включать в себя различные проводные и/или беспроводные технологии сетевого взаимодействия, например, сотовые, Bluetooth, проводные и/или беспроводные сети с коммутацией пакетов и т.д.
[6] Хранилище 106 данных может включать в себя один или более известных носителей, например, накопители на жестких дисках, твердотельные накопители или какая-либо энергозависимая или энергонезависимая компьютерная память. Хранилище 106 данных типично хранит накопленные данные 115, отправленные от устройств 110 сбора данных.
[7] Система 107 предупреждения о возможном столкновении, которая является известной, включается в транспортное средство 101 и может определять, грозит ли лобовое столкновение транспортного средства 101 со вторым транспортным средством, и, при таком определении, может активировать один или более механизмов транспортного средства без вмешательства водителя, например, тормоз, рулевое управление, дроссельную заслонку и т.д. Дополнительно, система 107 предупреждения о столкновении может включать в себя механизм вывода, чтобы указывать потенциальное лобовое столкновение, например, звуки и/или визуальные индикаторы, предоставленные через HMI транспортного средства 101.
[8] Устройства 110 сбора данных могут включать в себя множество устройств. Например, различные контроллеры в транспортном средстве могут работать как устройства 110 сбора данных, чтобы предоставлять данные 115 через CAN-шину, например, данные 115, относящиеся к скорости транспортного средства, ускорению, функциональности системы и/или компонента, и т.д., любого числа транспортных средств 101, включающих в себя рассматриваемое транспортное средство и/или целевое транспортное средство. Дополнительно, датчики или т.п., оборудование системы глобального позиционирования (GPS) и т.д. могут быть включены в транспортное средство и сконфигурированы в качестве устройств 110 сбора данных, чтобы предоставлять данные непосредственно компьютеру 105, например, через проводное или беспроводное соединение. Устройства 110 сбора данных датчиков могут включать в себя такие механизмы как радиолокационные, лидарные, сонарные и т.д. датчики, которые могут быть применены, чтобы измерять расстояние между транспортным средством 101 и другими транспортными средствами или объектами.
[9] Накопленные данные 115 могут включать в себя множество данных, накопленных в транспортном средстве 101. Примеры накопленных данных 115 предоставлены выше, и, кроме того, данные 115, как правило, собираются с помощью одного или более устройств 110 сбора данных и могут дополнительно включать в себя данные, вычисленные из них в компьютере 105. В целом, накопленные данные могут включать в себя любые данные, которые могут быть собраны посредством устройств 110 сбора данных и/или вычислены из таких данных.
[10] Система 100 дополнительно включает в себя сеть 120. Сеть 120 может быть одним или более из различных проводных или беспроводных механизмов связи, включающих в себя любую желаемую комбинацию проводных (например, кабель и волокно) и/или беспроводных (например, сотовая связь, беспроводная связь, спутниковая связь, микроволновая связь и радиочастотная связь) механизмов связи и любую желаемую топологию сети (или топологии, когда используется множество механизмов связи). Примерные сети передачи данных включают в себя беспроводные сети передачи данных (например, использующие Bluetooth, IEEE 802.11 и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги передачи данных.
[11] Система 100 включает в себя носимое устройство 135. Носимое устройство 135 может быть любым устройством из множества вычислительных устройств, носимых человеком, например, на запястье, вокруг шеи или талии и т.д. водителя транспортного средства. Устройство 135 включает в себя процессор и память, также как механизмы связи, такие, которые являются известными. Например, носимое устройство 135 может быть часами, интеллектуальными часами, вибрирующим устройством и т.д., которое включает в себя аппаратные средства и программирование, чтобы обеспечивать беспроводную связь с помощью протоколов IEEE 802.11, Bluetooth и/или протоколов сотовой связи. Дополнительно, носимое устройство 135 может использовать такие возможности связи, чтобы связываться по сети 120, а также непосредственно с компьютером 105 транспортного средства, например, с помощью Bluetooth или т.п.
[12] Система 100 дополнительно включает в себя пользовательское устройство 140. Пользовательское устройство 140 может быть любым устройством из множества вычислительных устройств, включающих в себя процессор и память, например, смартфоном, планшетом, персональным цифровым помощником, и т.д., пользовательское устройство 140 может использовать сеть 120, чтобы связываться с компьютером 105 транспортного средства и носимым устройством 135.
[13] Фиг. 2 иллюстрирует процесс 200 активации сигналов тревоги в транспортном средстве 101 на основе расстояния между рассматриваемым транспортным средством и целевым транспортным средством. Процесс 200 начинается на этапе 202, на котором вычислительное устройство 105 идентифицирует пассажира. Вычислительное устройство 105 может идентифицировать водителя известным образом, например, принимая данные от одного или более из носимого устройства 135, пользовательского устройства 140 и/или устройств 110 сбора данных. Например, пассажир может быть идентифицирован с помощью технологий распознавания изображений в компьютере 105 с помощью данных 115 от устройства 110 сбора данных камеры, личность пользователя может быть введена через устройство 135 HMI транспортного средства 101, или устройство 135 может идентифицировать пользователя/пассажира через накопленные биометрические данные, например, отпечаток пальца, и т.д. После идентификации пассажира вычислительное устройство 105 может извлекать из своего хранилища 106 данных информацию о пассажире, включающую в себя возраст, размер, уровень мастерства вождения, предпочтительные механизмы для приема информации (например, тактильный, звуковой и т.д.) и т.д.
[14] Далее, на этапе 205, на котором вычислительное устройство 105 собирает данные 115 от устройств 110 сбора данных о целевом транспортном средстве. Данные 115 могут включать в себя позицию целевого транспортного средства, позицию рассматриваемого транспортного средства, скорость целевого транспортного средства и скорость рассматриваемого транспортного средства.
[15] Далее, на этапе 210, вычислительное устройство 105 определяет интервал движения с целевым транспортным средством. "Интервал движения", когда используется в данном документе, является интервалом времени, разделяющим два транспортных средства, т.е., разницей во времени, с которой два транспортных средства проедут общую точку на дороге. Например, интервал движения может быть вычислен по следующему уравнению:

где H - это интервал движения, rt - это позиция второго или целевого транспортного средства, rh - это позиция первого или рассматриваемого транспортного средства, и vh - это скорость рассматриваемого транспортного средства. Значения rt и rh могут быть выражены в расстояниях относительно общей системы координат, например, в простом примере rt может быть определено как начальная точка, т.е., ноль, а rh может быть определено как расстояние, например, в метрах, от начальной точки. Различие между обоими, как видно в числителе вышеприведенного выражения, будет тогда расстоянием в метрах, которое, когда делится на значение v скорости, будет предоставлять значение H интервала движения во времени. Дополнительно или альтернативно, интервал движения может быть средним значением относительно нескольких измерений k, так что

где β - это предварительно определенный постоянный коэффициент фильтра, а Hm - это средний интервал движения относительно измерений k.
[16] Далее, на этапе 212, вычислительное устройство 105, например, согласно инструкциям, включенным в систему 107 предупреждения о возможном столкновении, такую, которая является известной, определяет прогнозируемое время до столкновения с целевым транспортным средством. Вычислительное устройство 105 может дополнительно или альтернативно определять среднее прогнозируемое время до столкновения относительно последовательности измерений k.
[17] Далее, на этапе 215, вычислительное устройство 105 определяет, ниже ли интервал движения предварительно определенного порогового значения. Пороговое значение, как правило, устанавливается, чтобы инструктировать активацию механизма в носимом устройстве 135, прежде чем система 107 предупреждения о возможном столкновении инициирует действие, например, управлять одним или более компонентами транспортного средства 101 и/или активировать механизм предупреждения транспортного средства 101, как описано выше. Пороговое значение может также корректироваться на основе информации о пассажире, извлеченной на этапе 202, например, неопытный пассажир может иметь более низкое пороговое значение, чтобы учитывать увеличенное время реакции, опытный водитель может иметь более высокое пороговое значение, и т.д. Дополнительно, пороговое значение может быть в дополнение, и установлено более низким, чем пороговое значение, используемое в существующих в настоящее время системах 107 предотвращения столкновений, как упомянуто выше. Пороговое значение может также быть определено, по меньшей мере, частично по скорости рассматриваемого транспортного средства, дорожным условиям, текущей погоде и/или другим данным 115, собранных устройствами 110 сбора данных. Если интервал движения ниже предварительно определенного порогового значения, процесс продолжается на этапе 220. Иначе, процесс возвращается к этапу 205, чтобы собирать больше данных транспортного средства.
[18] На этапе 220 вычислительное устройство 105 предоставляет инструкцию носимому устройству 135 активировать один или более механизмов вывода. Механизмы вывода могут включать в себя тактильный вывод, например, вибрацию, звуковой вывод и/или визуальный вывод, например, мигающие лампы, мигающие цвета и т.д. На основе информации с этапа 202 один или более механизмов вывода могут быть выбраны согласно пассажиру. Например, пассажир, который плохо слышит, может иметь более сильный вибрирующий вывод, в то время как другой пассажир может предпочитать визуальный вывод. Преимущественно, вычислительное устройство 105 может быть запрограммировано, например, включая в себя настройку порогового значения на этапе 215, чтобы инструктировать активацию вывода носимого устройства, прежде чем сигнал тревоги, предупреждение или действие уклонения реализуется посредством традиционной системы 107 предупреждения, например, системы, которая предоставляет указание, или реагирует, на грозящее столкновение, активируя фонари, звуковые сирены, тормоза и т.д. транспортного средства. Таким образом, водитель транспортного средства 101 в контексте настоящей системы 100 может предпринимать уклоняющееся и/или избегающее действие раньше.
[19] Далее, на этапе 225, вычислительное устройство 105 определяет, меньше ли время до столкновения, чем второе предварительно определенное пороговое значение, указывающее, что возможное столкновение является угрожающим. Система 107 предупреждения о столкновении может определять второе пороговое значение. Если время до столкновения меньше второго предварительно определенного порогового значения, процесс 200 переходит к этапу 230. Иначе, процесс 200 возвращается к этапу 205, чтобы собирать больше данных транспортного средства.
[20] На этапе 230 вычислительное устройство 105 активирует один или более вторых механизмов вывода, т.е., сигнализацию транспортного средства, для системы 107 предупреждения о возможном столкновении, и процесс 200 заканчивается. Вторые механизмы вывода могут включать в себя, например, вибрирующее рулевое колесо, сигнализацию через динамики транспортного средства, мигающую лампу на приборной панели, и т.д.
[21] Когда используется в данном документе, наречие "практически", преобразующее прилагательное, означает, что форма, структура, показатель, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, показателя, значения, вычисления и т.д. вследствие несовершенств в материалах, механической обработке, производстве, показателя датчика, вычислениях, времени обработки, времени связи и т.д.
[22] Вычислительные устройства 105, как правило, каждое, включают в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из запоминающего устройства, машиночитаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве 105, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[23] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[24] Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Например, в процессе 200, один или более этапов могут пропускаться, или этапы могут выполняться в порядке, отличном от порядка, показанного на фиг. 2. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться так, чтобы ограничивать раскрытый предмет изобретения.
[25] Соответственно, следует понимать, что настоящее раскрытие сущности, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Множество вариантов осуществления и вариантов применения, отличных от предоставленных примеров, должны быть очевидными для специалистов в данной области техники после прочтения вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, а вместо этого должны быть определены со ссылкой на формулу изобретения, приложенную к нему и/или включенную в непредварительную патентную заявку, основанную на данном описании, вместе с полными рамками эквивалентов, к которым такие пункты формулы изобретения приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ПРЕОДОЛЕНИЯ ИЗГИБОВ | 2015 |
|
RU2711403C2 |
| УЛУЧШЕННАЯ РАБОТА СЕНСОРНОГО ЭКРАНА | 2015 |
|
RU2696978C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ОБНАРУЖЕНИЯ ПОВЕДЕНИЯ В ПРЕДЕЛАХ ПОЛОСЫ ДВИЖЕНИЯ | 2015 |
|
RU2710125C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| УЛУЧШЕННАЯ ДОСТАВКА СООБЩЕНИЙ | 2015 |
|
RU2739913C2 |
| СИСТЕМА И СПОСОБ УМЕНЬШЕНИЯ ПОСЛЕДСТВИЙ И ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2018 |
|
RU2715601C2 |
| УЛУЧШЕННОЕ ОПОВЕЩЕНИЕ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2709210C2 |
| НАСТРАИВАЕМАЯ ОТЧЕТНОСТЬ С ПОМОЩЬЮ НОСИМОГО УСТРОЙСТВА | 2015 |
|
RU2735112C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ОПАСНОГО ВОЖДЕНИЯ И КОМПЬЮТЕР ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2679299C2 |

Определяется интервал движения между первым транспортным средством и вторым транспортным средством. Определяется прогнозируемое время до столкновения между первым транспортным средством и вторым транспортным средством. Первый механизм в носимом устройстве в первом транспортном средстве активируется, когда интервал движения меньше предварительно определенного порогового значения. Второй механизм в первом транспортном средстве активируется, когда прогнозируемое время до столкновения меньше второго предварительно определенного порогового времени. Улучшается предупреждение о возможном столкновении. 2 н. и 10 з.п. ф-лы, 2 ил.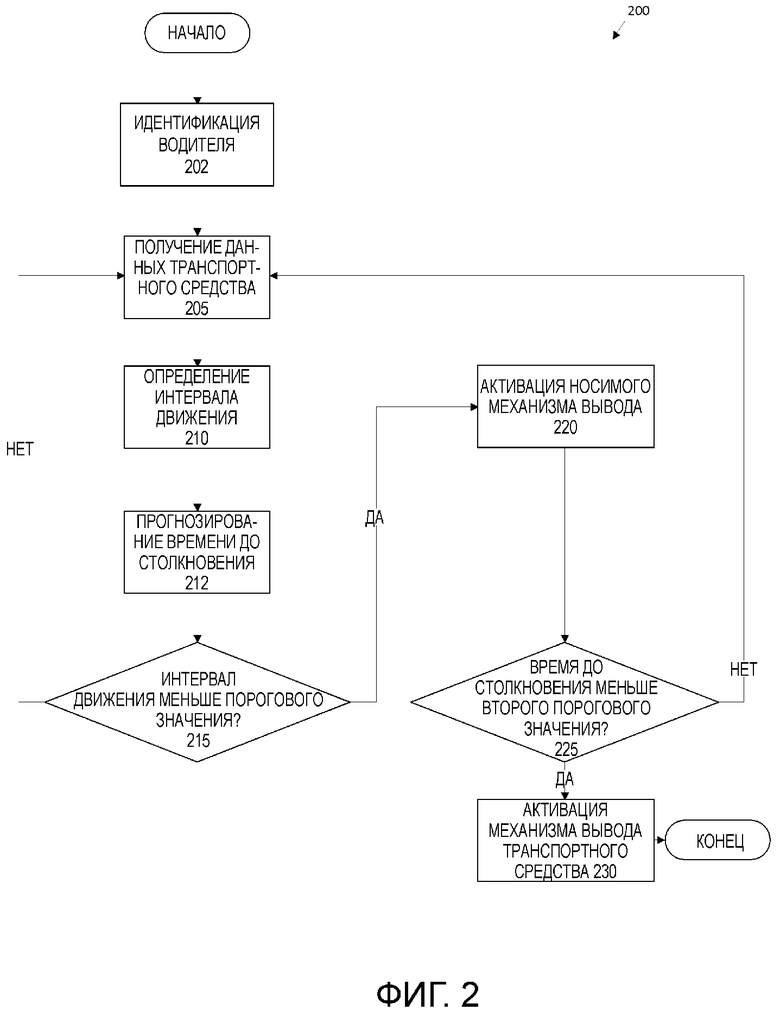
1. Система предотвращения столкновений, содержащая компьютер, включающий в себя процессор и память, память хранит инструкции, исполняемые компьютером, чтобы:
определять средний интервал движения между первым транспортным средством и вторым транспортным средством на основе текущего интервала движения и множества предыдущих вычислений интервала движения;
вычислять среднее прогнозируемое время до столкновения между первым транспортным средством и вторым транспортным средством на основе текущего прогнозируемого времени до столкновения и множества предыдущих вычислений прогнозируемого времени до столкновения;
активировать первый механизм в носимом устройстве в первом транспортном средстве, когда средний интервал движения меньше предварительно определенного порогового значения; и
активировать второй механизм в первом транспортном средстве, когда среднее прогнозируемое время до столкновения меньше второго предварительно определенного порогового значения.
2. Система по п. 1, в которой инструкции включают в себя инструкции, чтобы активировать первый механизм вывода только на носимом устройстве, носимом водителем первого транспортного средства.
3. Система по п. 1, в которой первый механизм является тактильным механизмом вывода.
4. Система по п. 1, в которой инструкции дополнительно включают в себя инструкции, чтобы активировать первый механизм перед вторым механизмом.
5. Система по п. 1, в которой предварительно определенное пороговое значение вычисляется, чтобы активировать первый механизм, прежде чем второе предварительно определенное пороговое значение активирует второй механизм.
6. Система по п. 1, в которой второй механизм является частью системы предупреждения о столкновении.
7. Способ предотвращения столкновений, содержащий этапы, на которых:
определяют средний интервал движения между первым транспортным средством и вторым транспортным средством на основе текущего интервала движения и множества предыдущих вычислений интервала движений;
определяют среднее прогнозируемое время до столкновения между первым транспортным средством и вторым транспортным средством на основе текущего прогнозируемого времени до столкновения и множества предыдущих вычислений прогнозируемого времени до столкновения;
активируют первый механизм в носимом устройстве в первом транспортном средстве, когда средний интервал движения меньше предварительно определенного порогового значения; и
активируют второй механизм в первом транспортном средстве, когда среднее прогнозируемое время до столкновения меньше второго предварительно определенного порогового значения.
8. Способ по п. 7, дополнительно содержащий этап, на котором активируют первый механизм только на носимом устройстве, носимом водителем первого транспортного средства.
9. Способ по п. 7, в котором первый механизм является тактильным механизмом вывода.
10. Способ по п. 7, дополнительно содержащий этап, на котором активируют первый механизм перед вторым механизмом.
11. Способ по п. 7, в котором предварительно определенное пороговое значение вычисляется, чтобы активировать первый механизм, прежде чем второе предварительно определенное пороговое значение активирует второй механизм.
12. Способ по п. 7, в котором второй механизм является частью системы предупреждения о столкновении.
| US 8527172 B2, 30.09.2013 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ ПОЛУЧЕНИЯ 2-ФЕНОКСИ-5,7-ДИМЕТИЛ-2,6-ДИОКСО-1,3-ДИАЗА-2-ФОСФААДАМАНТАНА | 1988 |
|
SU1529695A1 |
| WO 2010000521 A1, 07.01.2010. | |||

