ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к тренировочным устройствам для развития навыков спортсмена, в частности для тренировки вестибулярного аппарата у спортсменов, занимающихся фигурным катанием.
УРОВЕНЬ ТЕХНИКИ
Известен тренажерный комплекс для развития координации движений и вестибулярной устойчивости в сложнокоординационных видах спорта (патент RU 2595595, 27.08.2016), который характеризуется наличием электромеханического узла вращающейся опорной горизонтальной площадки, включающего каркас, электродвигатель с реверсивным движением, блок управления электродвигателем, вал привода вращения с опорными подшипниками, шкив ременного привода, по крайней мере две электромагнитные муфты, по крайней мере две разносторонние обгонные муфты, вертикальной П-образной конструкции, представляющей сборно-разборный металлический каркас крепления лонжи, и устройства горизонтального вращения, электромеханического узла лонжи, включающего электродвигатель с реверсивным движением, блок управления электродвигателем, гибкий привод вращения лонжи, вал привода вращения лонжи с опорными подшипниками, шкив ременного привода, по крайней мере две съемные лонжи с разносторонними обгонными муфтами, электромеханического узла устройства горизонтального вращения, включающего съемную площадку с ремнями крепления на оси вращения (УГВ), электродвигатель с реверсивным движением, блок управления электродвигателем, вал привода вращения УГВ с опорными подшипниками, шкив ременного привода, по крайней мере две электромагнитные муфты, по крайней мере две разносторонние обгонные муфты, электромеханического вибрационного узла, включающего электродвигатель, создающий вибрацию, блок управления электродвигателем, создающим вибрацию, привода, пульта дистанционного управления с переключением направления вращения с регулятором скорости вращения, компьютера с беспроводными датчиками-сенсорами, приборами измерения физиологического состояния спортсмена.
Недостатком известного решения является низкая эффективность тренажера в части развития навыков у тренируемого спортсмена, которая обуславливается тем, что в качестве механизма вращения используется электродвигатель с реверсивным движением, соединенный с блоком управления электродвигателем, вал привода вращения с опорными подшипниками, шкив ременного привода, по крайней мере две электромагнитные муфты, по крайней мере две разносторонние обгонные муфты и регулировка скорости вращения электродвигателем выполняется принудительно с помощью внешнего пульта управления.
Данный недостаток обусловлен тем, что при выполнении упражнений с отрывом от вращающейся платформы, при возвращении спортсмена на нее после прыжка, вращение платформы не меняется, что может привести к потере устойчивости спортсмена, травме, а также не воспроизводит реального эффекта от выполнения упражнения на льду.
Также такой принцип исполнения механизма вращения является достаточно сложным, что снижает надежность конструкции.
Другой недостаток известного решения заключается в том, что информация о качестве исполнения упражнения спортсменом собирается с ряда датчиков, что препятствует свободному движению спортсмена при тренировке.
РАСКРЫТИЕ ИЗОБРЕТЕНИЕ
Технической проблемой, решаемой с помощью заявленного решения, является повышение качества процесса тренировки фигуристов за счет усовершенствования конструкции тренажера в части механизма вращения, что приближает его работу к реальным условиям, а также повышение точности данных о ходе выполнения упражнения за счет обеспечения сбора статистических параметров выполнения спортсменом упражнения непосредственно с механизма вращения.
Основным техническим результатом является повышение качества процесса тренировки за счет использования в качестве механизма вращения редуктора с электродвигателем, который может работать в режиме замкнутого или разомкнутого контура скорости, обеспечивающих автоматическую корректировку скорости вращения платформы и времени удержания спортсмена в воздухе при выполнении спортсменом прыжковых упражнений.
Дополнительным техническим результатом является снижение травматизма при выполнении упражнений за счет жесткой фиксации платформы вращения с помощью переключения режимов скорости вращения электродвигателя в момент отрыва спортсмена от платформы.
Заявленный технический результат достигается с помощью тренажера для тренировки вестибулярных навыков спортсмена, который содержит
платформу, выполненную с возможностью вращения, установленную в зоне отскока спортсмена, выполненной в виде площадки, причем платформа соединена с механизмом вращения, который состоит из редуктора, первого электродвигателя и управляюще-преобразующего блока первого электродвигателя, причем первый электродвигатель выполнен с возможностью работы в режиме замкнутого или разомкнутого контура скорости;
средство для закрепления механизма удержания спортсмена в воздухе, который представляет собой подъемный трос, соединенный с механизмом крепления и механизмом подъёма, который состоит из редуктора, второго электродвигателя и управляюще-преобразующего блока второго электродвигателя;
вычислительный модуль, содержащий процессор и по меньшей мере одно средство памяти, выполненный с возможностью генерирования и передачи управляющих сигналов на управляюще-преобразующие блоки первого и второго электродвигателей,
причем вычислительный модуль получает данные от управляюще-преобразующего блока первого электродвигателя, характеризующие скорость вращения первого электродвигателя, определяет величину корректировки скорости платформы на основании полученных данных скорости вращения платформы и формирует на основании скорости вращения платформы управляющий сигнал, посылаемый на управляюще-преобразующий блок второго электродвигателя, на основании которого формируется активация второго электродвигателя для удержания спортсмена в воздухе.
В частном варианте исполнения управляюще-преобразующие блоки первого и второго электродвигателей соединены с вычислительным модулем с помощью проводной связи.
В частном варианте исполнения платформа выполнена в виде диска.
В частном варианте исполнения средство для закрепления механизма удержания и вращения спортсмена в воздухе представляет собой капитальный или временный элемент конструкции.
В частном варианте исполнения вычислительный модуль собирает статистику хода выполнения упражнения спортсменом.
В частном варианте исполнения статистика представляет собой данные скорости вращения платформы в ходе выполнения упражнения.
В частном варианте исполнения учитываются по меньшей мере параметры положения тела спортсмена в ходе выполнения упражнения и воздействие на платформу.
В частном варианте исполнения тренажёр дополнительно содержит по меньшей мере одну камеру для фиксации хода выполнения упражнения спортсменом.
В частном варианте исполнения вычислительный модуль выполнен с возможностью выбора режимов вращения первого и второго электродвигателей.
В частном варианте исполнения вычислительный модуль выполнен с возможностью хранения данных записи с одной или более камер.
В частном варианте исполнения вычислительный модуль хранит данные и видеозаписи об эталонных результатах выполнения упражнений.
В частном варианте исполнения вычислительный модуль сравнивает текущие показатели и видеозаписи, полученные с одной или более камер, выполнения упражнений спортсменом с эталонными показателями.
В частном варианте исполнения при удержании спортсмена в воздухе выполняется расчет времени его удержания на основании данных скорости вращения платформы.
В частном варианте исполнения тормозной механизм первого электродвигателя представляет собой электромагнитный тормоз.
В частном варианте исполнения редуктор первого механизма вращения выполнен в виде углового планетарного редуктора или червячного редуктора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
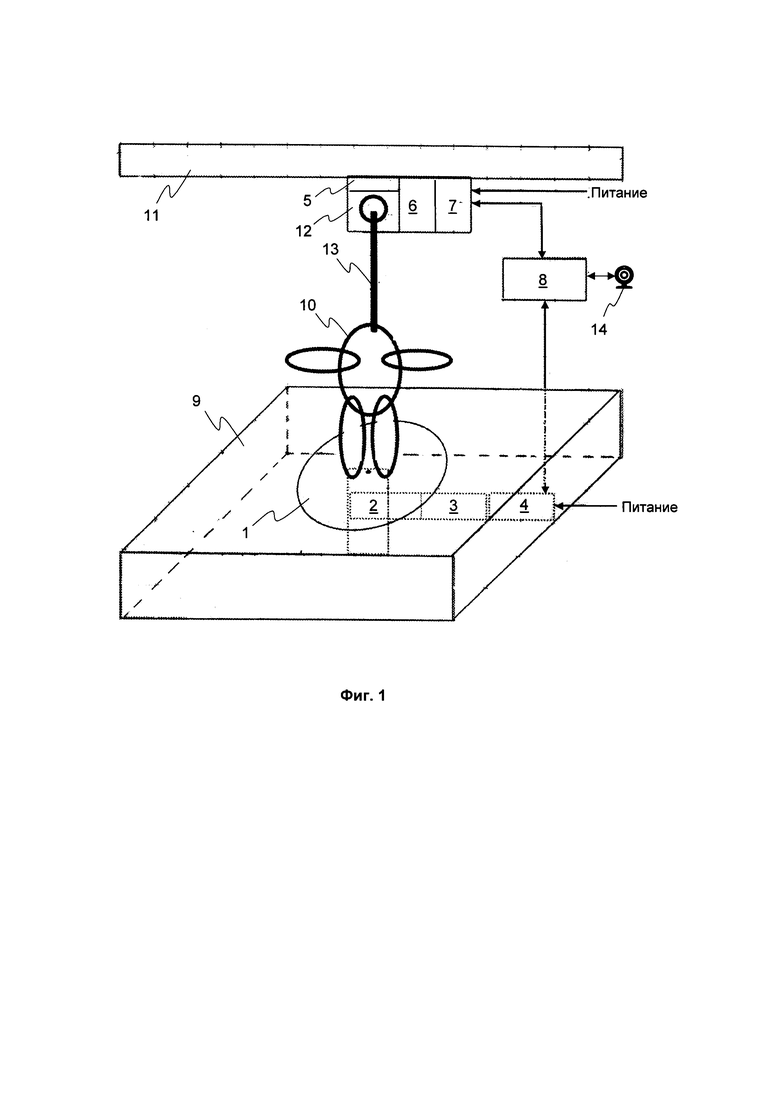
На Фиг. 1 представлена схема исполнения заявленного тренажера.
На Фиг. 2 представлен принцип соединения платформы вращения с редуктором.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Согласно Фиг. 1 представлена общая схема заявленного тренажера. Тренажер состоит из вращающейся платформы (1), на которой выполняется упражнение спортсменом (10). Вращение платформы (1) осуществляется с помощь первого механизма вращения, который состоит из редуктора (2), соединенного с ним первого электродвигателя (3) и управляюще-преобразующего блока первого электродвигателя (4).
Платформа (1) установлена в зоне отскока спортсмена (9), которая представляет собой площадку. Упомянутая зона (9) выполнена в виде жесткой конструкции в форме параллелепипеда. Её верхняя сторона является площадкой от собственных внешних краев до наружной границы платформы вращения (1), которая может быть выполнена, например, в виде диска и включает в себя необходимые крепления для первого механизма вращения.
На Фиг. 2 представлен пример платформы вращения (1), которая выполнена в виде точеной металлической конструкции грибовидной формы, ножка которой заходит напрямую в выходной вал (21) редуктора (2). За счет отсутствия опорного подшипника в конструкции тренажера существенно сокращается шум, создаваемый при работе тренажера. Редуктор (2) может представлять собой соосный, угловой планетарный или червячный редуктор.
Управляюще-преобразующий блок первого электродвигателя (4) соединен с помощью линии (канала) связи с вычислительным модулем (8). Связь между блоком (4) и модулем (8) может быть проводного (USB, RS-232, RS-485 и т.п.) или беспроводного вида (Bluetooth, Wi-Fi).
Вычислительный модуль (8) представляет собой устройство, содержащее один или более процессоров и одно или более средство памяти. Модуль (8) может выполняться на базе персонального компьютера, планшета, сервера, мейнфрейма, ноутбука, смартфона и т.п. Память модуля (8) в общем виде представляет собой оперативную память (RAM), дополнительно могут использоваться различные средства хранения информации (ROM, NAND-flash, EEPROM, HDD, SSD, оптические носители информации и т.п.).
Модуль (8) может также содержать различные интерфейсы ввода/вывода (Ethernet, USB, IrDa, PS/2) и соответствующие средства ввода/вывода (клавиатура, дисплей, тачскрин, тачпад, проектор, джойстик, аудиодинамики и т.п.).
Вычислительный модуль (8) также соединен каналом связи проводного или беспроводного типа с управляюще-преобразующим блоком второго электродвигателя (7). Блок (7) входит в состав второго механизма вращения, закрепленного в верхней части тренажера. Механизм подъёма обеспечивает удержание спортсмена (10) в точке отрыва при выполнении прыжкового упражнения и состоит из редуктора (5), соединенного со вторым электродвигателем (6), который управляется блоком (7).
Удержание спортсмена (10) в точке отрыва выполняется за счет его фиксации с помощью троса (13), закрепленного на соответствующем механизме крепления (12), к которому присоединен упомянутый механизм подъема. Редуктор (5) закреплен на балке (11) (или ином типе конструкции) сверху так, чтобы выходной вал и подъемный трос (13) оказались над центром вращающейся платформы (1). На выходном вале редуктора (5) сделано кольцо, к которому крепится подъемный трос (13). Сам подъемный трос (13) по горизонтальной оси не вращается, только поднимает и удерживает спортсмена (10). Вращение спортсмена (10) при подъеме обеспечивается за счет пассивного механизма, который включен в узел соединения жилета с подъемным тросом (13). К входному валу редуктора (5) соединен электродвигатель (6). При исполнении упражнения выходной вал редуктора (5) через упомянутое кольцо натягивает и поднимает подъемный трос (13), соединенный с экипировкой для крепления спортсмена (10) к подъемному тросу (13), за счет чего выполняется подъем и при необходимости удержание спортсмена в точке отрыва от платформы (1).
Верхняя часть тренажера представляет собой средство (11), выполненное с возможностью закрепления на нем упомянутых элементов тренажера, таких как механизм крепления троса (12) и механизм подъема. Элемент (11) представляет собой элемент конструкции капитальный или временный элемент конструкции, например стену, балку, раму и т.п.
Тренажер управляется программным обеспечением, установленным на вычислительном модуле (8). Тренажер получает данные от управляюще-преобразующего блока первого электродвигателя (4), которые характеризуют скорость вращения первого электродвигателя (3). На основании полученных данных модуль (8) с помощью программного обеспечения определяет величину корректировки скорости платформы (1) на основании полученных данных скорости вращения платформы (1) и формирует на основании полученной информации о скорости вращения платформы (1) управляющий сигнал, который отправляется на управляюще-преобразующий блок второго электродвигателя (7), который на основании полученной информации формирует сигнал для активации второго электродвигателя (6) для удержания спортсмена в воздухе при выполнении прыжкового упражнения.
В тренажере предусмотрены два основных режима работы: вращение без подъемной силы и вращение с последующим воздействием подъемной силы.
При режиме вращения без подъемной силы с модуля (8) подается команда для подачи электрического тока на первый электродвигатель (3) посредством косвенной передачи крутящего момента (отправляется только значение тока, скорость вращения платформы не контролируется алгоритмами управления). Управление осуществляется в режиме реального времени. Для этого может применяться специализированный графический интерфейс пользователя вычислительного модуля (8) или связанного с ним внешнего устройства пользователя, например смартфона, ноутбука, персонального компьютера и т.п. Параллельно с этим процессом идет автоматический сбор информации с управляюще-преобразующего блока первого электродвигателя (4) о скорости вращения платформы (1) и запись этой информации в память модуля (8). Скорость вращения платформы (1) зависит как от параметра поданного тока, так и от изменений положения тела спортсмена (10), в частности положения рук и ног при выпрямлении/сгибании/подъеме наверх и любых других движениях, способствующих перемещению центра тяжести тела спортсмена (10) ближе или дальше к центру оси вращения платформы (1).
При работе тренажера в режиме вращения с последующей подъемной силой задействованы оба электродвигателя (3) и (6). Сначала выполняется короткое упражнение спортсменом (10) без подъемной силы, в конце которого спортсмен (10) готовится к прыжку (сгибает ноги, выпрямляет руки в сторону), выпрыгивает (начинает разгибать ноги (колени, стопы), сгибать руки), группируется (окончательно плотно прижимает руки к туловищу, максимально разгибает ноги (колени, стопы), стремится удерживать тело в вертикальном положении, отрывается от платформы вращения (1)). В процессе выпрыгивания скорость вращения платформы (1) увеличивается за счет снятия массы спортсмена с платформы, программное обеспечение, установленное на вычислительном модуле (8), фиксирует триггер фазы выпрыгивания, запускает алгоритм выполнения команд для второго электродвигателя (6), в частности скорость его вращения и время удержания в пиковой точке, выбранный до исполнения упражнения либо определяемый автоматически в ходе выполнения упражнения. По записанным ранее значениям скорости вращения платформы (1) при заданных параметрах тока и параметрах, получаемых с управляюще-преобразующего блока второго электродвигателя (7), модуль (8) распознает окончание фазы отрыва по факту получения значений триггерных параметров от первого (3) и второго (6) электродвигателей, регистрирующих, что масса тела спортсмена (10) полностью не находится на платформе (1). После распознавания окончания фазы отрыва вычислительный модуль (8) переключает первый электродвигатель (3) в режим прямой передачи и выставляет параметр скорости равным нулю, таким образом фиксируя платформу (1) для приземления спортсмена (10) после выполнения упражнения с подъемной силой. Таким образом упражнение с подъемной силой дает возможность дополнительного времени вращения при тренировке вращательных навыков без опоры.
Тренажер может работать в режиме замкнутого или разомкнутого контура скорости первого электродвигателя (3). Предусмотрен режим работы свободной передачи (разомкнутого контура), при котором в зависимости от выполняемых спортсменом движений он может придать дополнительное вращение/торможение платформе (1). В прототипе для реализации этой функции используется обгонная муфта. В заявленном решении используется команда, которая посылается электродвигателю (3), что в сочетании с редуктором (2) даёт указанный выше технический эффект.
Режим разомкнутого контура скорости используется для непрыжковых упражнений. В этом случае скорость вращения платформы (1) зависит от изменений положения тела спортсмена (10) и ускоряется или замедляется.
В управляющем ПО, выполняемом в модуле (8), используется алгоритм, который полностью имитирует вращение фигуриста (10) на льду. Модуль (8) постоянно получает информацию о мощности вращения платформы (1), которая соответствует скорости вращения электродвигателя (3). Когда спортсмен (10) выходит на какой-либо показатель скорости и выполняет движение, которое необходимо для увеличения его скорости, фиксируется увеличение также скорости вращения платформы (1). Управляющее ПО модуля (8) считывает показатель возросшей скорости вращения платформы (1) и добавляет параметр подаваемого тока на первый электродвигатель (3), чтобы имитировать реальное вращение на льду.
Используемый алгоритм в работе тренажера позволяет максимально точно имитировать вращение спортсмена (10) на льду, т.к. при аналогичных изменениях позы спортсмена (10) при реальном вращении на льду происходит перенос центра тяжести с центра лезвия на его "перекат" (зона около зубца лезвия), что и позволяет держать повышенную скорость, т.к. площадь контакта со льдом становится меньше. В случае если спортсмен (10) на тренажере после ускоряющего движения немного "выпустил" правильную позицию, за счет свободной передачи и алгоритмов управления при исполнении того или иного упражнения управляющее ПО корректирует подаваемую мощность на электродвигатель (3) для имитации реального ледового вращения. При ускорении спортсмена (10) и правильном удержании позиции происходит корректировка вращения платформы (1) на повышенной скорости. При ускорении спортсмена (10) и непродолжительном удержании позиции выполняется корректировка вращения платформы (1) для ее замедления. Таким образом выполняется имитация реальных условий вращения на льду.
После отрыва спортсмена от платформы электродвигатель (3) переходит в режим работы замкнутого контура скорости. В этом случае на двигатель (3) подается команда скорость 0, что позволяет в независимости от воздействия на платформу (1) при приземлении удерживать её в неподвижном состоянии. Дополнительно для торможения платформы (1) может применяться тормозной механизм, в частности электромагнитный тормоз. Т.к. нижний двигатель может мгновенно остановить вращение именно в момент нахождения спортсмена в воздухе, то в момент приземления платформа (1) жестко фиксируется, что значительно снижает травматичность.
Для переключения первого электродвигателя (3) в режим замкнутого контура используется триггер отрыва спортсмена (10) от платформы (1) (мгновенное увеличение скорости платформы (1) при отрыве спортсмена (10), снятии веса с платформы (1)). В триггер включена функция отправки сигнала подъемному механизму, а именно второму электродвигателю (6), на выполнение заданного заранее алгоритма.
Триггер отрыва спортсмена (10) от платформы (1) работает по принципу: на электродвигатель (3) подан ток, известны константы того с какой скоростью он должен вращаться без нагрузки. Когда спортсмен (10) готовится к прыжку, то скорость вращения меньше константы. Когда спортсмен (10) выпрыгивает, то скорость резко начинает увеличиваться и стремится к константе ток/скорость. В этот момент отправляется команда на подъёмный механизм, после того как константа достигнута по скорости (доля секунды), происходит включение режима прямой передачи и последующая команда скорость 0 или задействование электромагнитного тормоза электродвигателя.
В ПО, установленном на модуле (8), предусмотрен интерфейс для ведения базы данных с полями имен спортсменов, названия упражнений (под упражнением подразумевается последовательность изменений положения тела, рук и ног (выпрямление/сгибание/подъем наверх и любые другие движения, способствующие перемещению центра тяжести тела человека к или от центра оси вращения диска вращения)), даты исполнения упражнений, данные о скорости вращения платформы (1), вращения во время исполнения упражнения, данные о скорости, дистанции и времени удержания подъема подъемного троса (13) при работе тренажера в режиме вращения с последующим воздействием подъемной силы, номер видеоролика с видеозаписью исполнения конкретной попытки исполнения того или иного упражнения.
Тренажер может дополнительно быть снабжен одной или несколькими камерами (14), которые подключаются к вычислительному модулю (8) и ведут видеозапись хода выполнения упражнения спортсменом (10). С помощью данных, получаемых с одной или более камер (14), спортсмен сразу после выполнения упражнения может посмотреть запись, а также получить статистическую информации относительно хода выполнения упражнения, узнать, насколько правильно было оно выполнено, и т.п. Средство памяти модуля (8) хранит информацию об эталонных показателях выполнения упражнения, что позволяет в автоматическом режиме сравнивать показатели хода выполнения упражнения спортсменом (10) и анализировать отклонения от нормы.
С помощью анализа показаний, получаемых с электродвигателя тренажера (3), а также видеоматериалов тренер затрачивает намного меньше времени на разъяснения правильности выполнения упражнений, что позволяет указывать спортсмену (10) на ошибки с самыми высокими приоритетами после выполнения упражнения. Спортсмен (10) с помощью анализа визуальной составляющей по видеоматериалу может быстрее понять, о чем идет речь. Такой подход позволяет более эффективно проводить тренировку, т.к. за одну тренировочную сессию может заниматься больше спортсменов. КПД тренажера с педагогической точки зрения для группы - выше. Как следствие, можно проводить селекцию, что крайне важно в любом спорте.
Алгоритм вычислительного модуля (8) также предусматривает выдачу оценки спортсмену (10) на основании анализа показателей выполнения упражнения и их сравнения с эталонными данными. Дополнительно может применяться система компьютерного зрения или система стереоскопической записи изображения.

Изобретение относится к тренировочным устройствам для развития навыков спортсмена, в частности для тренировки вестибулярного аппарата у спортсменов, занимающихся фигурным катанием. Технической проблемой, решаемой с помощью изобретения, является повышение качества процесса тренировки фигуристов за счет усовершенствования конструкции тренажера в части механизма вращения, что приближает его работу к реальным условиям, а также повышение точности данных о ходе выполнения упражнения за счет обеспечения сбора статистических параметров выполнения спортсменом упражнения непосредственно с механизма вращения. Тренажер для тренировки вестибулярных навыков спортсмена содержит платформу (1), выполненную с возможностью вращения, установленную в зоне отскока спортсмена (9), выполненной в виде площадки, причем платформа соединена с угловым планетарным редуктором (2), первым электродвигателем (3) и управляюще-преобразующим блоком первого электродвигателя (4), причем первый электродвигатель (3) выполнен с возможностью работы в режиме замкнутого или разомкнутого контура скорости; средство (14) для закрепления механизма удержания спортсмена (10) в воздухе, который представляет собой подъемный трос (13), соединенный с редуктором (5), вторым электродвигателем (6) и управляюще-преобразующим блоком второго электродвигателя (7); вычислительный модуль (8), содержащий процессор и по меньшей мере одно средство памяти, выполненный с возможностью генерирования и передачи управляющих сигналов на управляюще-преобразующие блоки первого (4) и второго (7) электродвигателей, причем вычислительный модуль (8) получает данные от управляюще-преобразующего блока первого электродвигателя (4), характеризующие скорость вращения первого электродвигателя, определяет величину корректировки скорости платформы (1) на основании полученных данных скорости вращения платформы (1) и формирует на основании скорости вращения платформы (1) управляющий сигнал, посылаемый на управляюще-преобразующий блок второго электродвигателя (7), на основании которого формируется активация второго электродвигателя (6) для удержания спортсмена в воздухе. 14 з.п. ф-лы, 2 ил.
1. Тренажер для тренировки вестибулярных навыков спортсмена, содержащий
платформу (1), выполненную с возможностью вращения, установленную в зоне отскока спортсмена (9), выполненной в виде площадки, причем платформа соединена с угловым планетарным редуктором (2), первым электродвигателем (3) и управляюще-преобразующим блоком первого электродвигателя (4), причем первый электродвигатель (3) выполнен с возможностью работы в режиме замкнутого или разомкнутого контура скорости;
средство (14) для закрепления механизма удержания спортсмена (10) в воздухе, который представляет собой подъемный трос (13), соединенный с редуктором (5), вторым электродвигателем (6) и управляюще-преобразующим блоком второго электродвигателя (7);
вычислительный модуль (8), содержащий процессор и по меньшей мере одно средство памяти, выполненный с возможностью генерирования и передачи управляющих сигналов на управляюще-преобразующие блоки первого (4) и второго (7) электродвигателей,
причем вычислительный модуль (8) получает данные от управляюще-преобразующего блока первого электродвигателя (4), характеризующие скорость вращения первого электродвигателя, определяет величину корректировки скорости платформы (1) на основании полученных данных скорости вращения платформы (1) и формирует на основании скорости вращения платформы (1) управляющий сигнал, посылаемый на управляюще-преобразующий блок второго электродвигателя (7), на основании которого формируется активация второго электродвигателя (6) для удержания спортсмена в воздухе.
2. Тренажер по п.1, характеризующийся тем, что управляюще-преобразующие блоки первого (4) и второго (7) электродвигателей соединены с вычислительным модулем (8) с помощью проводной связи.
3. Тренажер по п.1, характеризующийся тем, что платформа (1) выполнена в виде диска.
4. Тренажер по п.1, характеризующийся тем, что средство (14) для закрепления механизма удержания и вращения спортсмена в воздухе представляет собой капитальный или временный элемент конструкции.
5. Тренажер по п.1, характеризующийся тем, что вычислительный модуль (8) собирает статистику хода выполнения упражнения спортсменом.
6. Тренажер по п.5, характеризующийся тем, что статистика представляет собой данные скорости вращения платформы (1) в ходе выполнения упражнения.
7. Тренажер по п.6, характеризующийся тем, что учитываются по меньшей мере параметры положения тела спортсмена в ходе выполнения упражнения и воздействие на платформу (1).
8. Тренажер по п.1, характеризующийся тем, что дополнительно содержит по меньшей мере одну камеру для фиксации хода выполнения упражнения спортсменом.
9. Тренажер по п.1, характеризующийся тем, что вычислительный модуль (8) выполнен с возможностью выбора режимов вращения первого и второго электродвигателей.
10. Тренажер по п.1, характеризующийся тем, что вычислительный модуль (8) выполнен с возможностью хранения данных записи с одной или более камеры.
11. Тренажер по п.1, характеризующийся тем, что вычислительный модуль (8) хранит данные об эталонных результатах выполнения упражнений.
12. Тренажер по п.10, характеризующийся тем, что вычислительный модуль (8) сравнивает текущие показатели выполнения упражнений спортсменом с эталонными показателями.
13. Тренажер по п.1, характеризующийся тем, что при удержании спортсмена в воздухе выполняется расчет времени его удержания на основании данных скорости вращения платформы (1).
14. Тренажер по п.1, характеризующийся тем, что первый электродвигатель (3) снабжен тормозным механизмом.
15. Тренажер по п.14, характеризующийся тем, что тормозной механизм первого электродвигателя (3) представляет собой электромагнитный тормоз.
| Устройство для тренировки фигуристов | 1981 |
|
SU1044295A1 |
| CN 105749523 A, 13.07.2016 | |||
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ РАЗВИТИЯ КООРДИНАЦИИ ДВИЖЕНИЙ И ВЕСТИБУЛЯРНОЙ УСТОЙЧИВОСТИ В СЛОЖНО-КООРДИНАЦИОННЫХ ВИДАХ СПОРТА И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2595595C1 |
| US 2006189453 A1, 24.08.2006. | |||

