Область техники, к которой относится изобретение
Изобретение относится к гимнастическому тренажеру для тяжелой атлетики.
Уровень техники
В настоящее время в тяжелой атлетике, бодибилдинге и фитнес-залах в целом силовые тренировки и тренировки на гипертрофию проводятся в основном с использованием штанги, то есть грифа, обычно изготовленного из стали, снабженного грузами на противоположных концах.
Сегодня свободная штанга является основным оборудованием для спортивных тренировок и подготовки в тренажерном зале; спортсмен прикладывает желаемую нагрузку к концам штанги, закрепляет ее, используя фиксирующие устройства, и начинает выполнение заранее определенного упражнения.
При использовании особенно высоких нагрузок спортсмену требуется внешняя помощь одного или нескольких помощников, которые должны быть немедленно доступны для безопасного выполнения упражнения, поскольку не существует защитных устройств, которые могли бы вмешаться в случае травмы спортсмена при подъеме штанги.
Таким образом, одно из основных ограничений тренировки со штангой, описанной выше, связано с тем фактом, что такая тренировка не может быть проведена в полной безопасности, кроме как в присутствии особенно внимательных помощников, готовых вмешаться и поддержать спортсмена в любой момент по необходимости.
Другим ограничением тренировки со штангой известного типа являются многочисленные простои, необходимые для замены или добавления новых и/или различных грузов на противоположных концах грифа.
Еще одним ограничением тренировок со штангой является тот факт, что физические показатели спортсмена не поддаются непрерывному и точному определению, поскольку доступными параметрами являются только вес штанги и время выполнения упражнения.
Раскрытие сущности изобретения
Задачей настоящего изобретения является разработка гимнастического тренажера для тяжелой атлетики, способного устранить вышеупомянутые недостатки и ограничения известного уровня техники.
В частности, одной из задач изобретения является разработка гимнастического тренажера, который является безопасным и может использоваться спортсменом без присутствия каких-либо вспомогательных помощников, когда это необходимо.
Другой задачей изобретения является разработка гимнастического тренажера, который позволит исключить простои при замене, снятии или добавлении нагрузок, которые являются типичными действиями при использовании известных на сегодняшний день штанг.
Также, одной из целей изобретения является разработка гимнастического тренажера, способного непрерывно и точно определять результативность спортсмена.
Вышеупомянутые задача и цели достигаются гимнастическим тренажером для тяжелой атлетики по п. 1 форумы изобретения.
Дополнительные характеристики гимнастического тренажера по п. 1 описаны в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Вышеупомянутая задача и цели, вместе с преимуществами, которые будут упомянуты далее, указаны в описании варианта осуществления изобретения, которое приведено в качестве неограничивающего примера со ссылкой на прилагаемые чертежи, где:
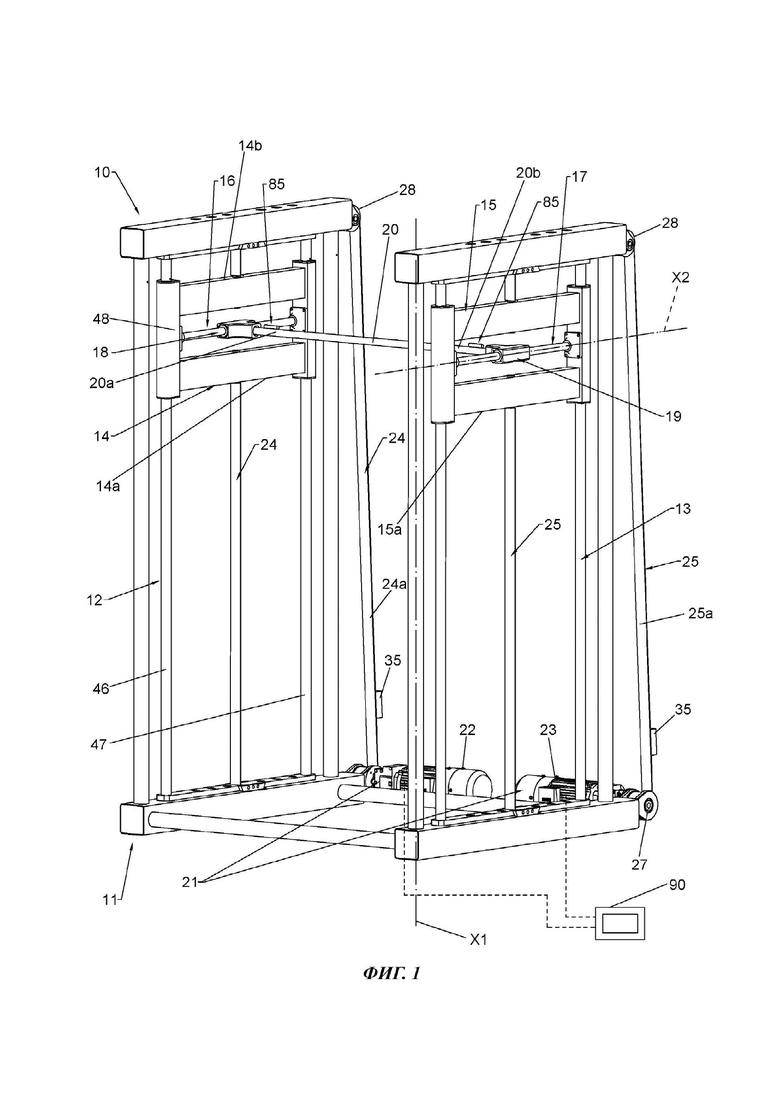
- на фигуре 1 представлен вид в перспективе гимнастического тренажера в соответствии с изобретением;
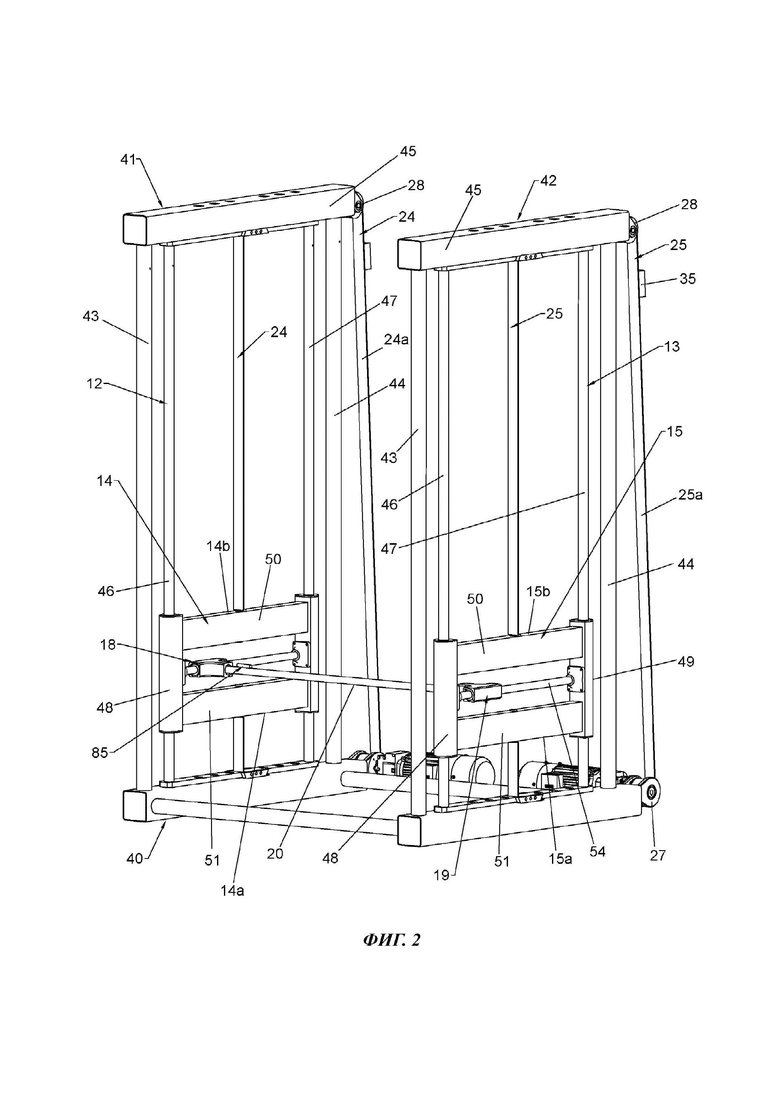
- на фигуре 2 представлен другой вид в перспективе гимнастического тренажера с фигуры 1;
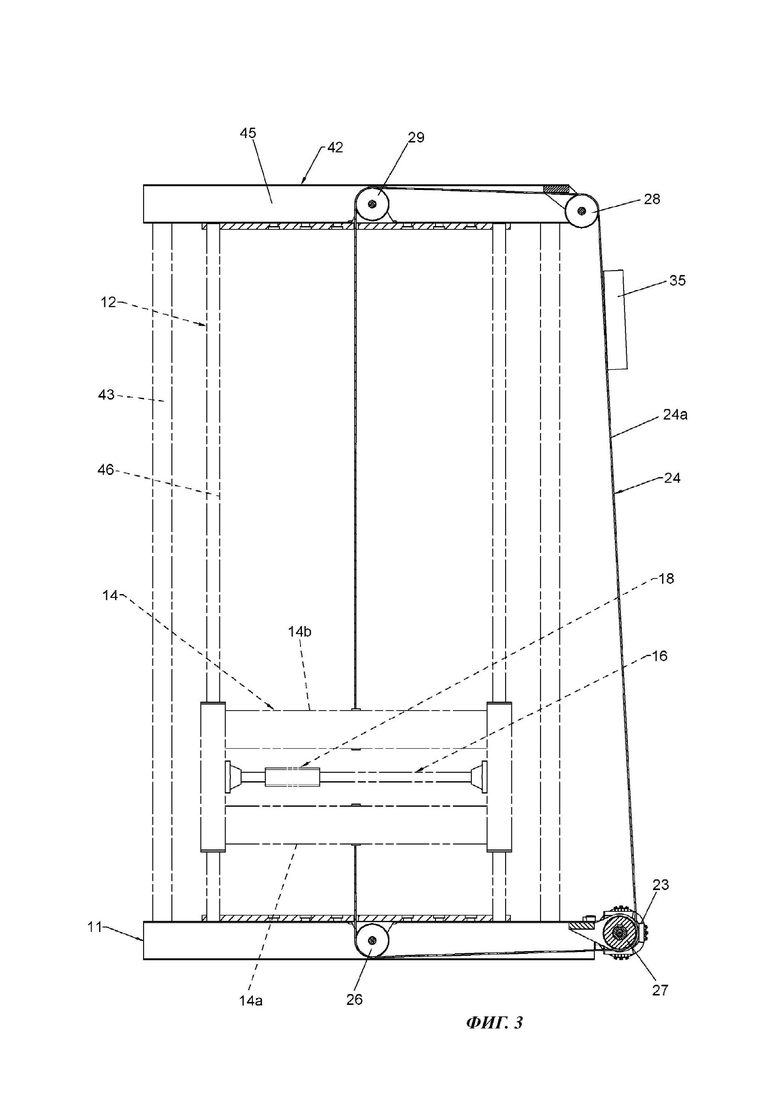
- на фигуре 3 представлен вид сбоку в разрезе гимнастического тренажера в соответствии с изобретением;
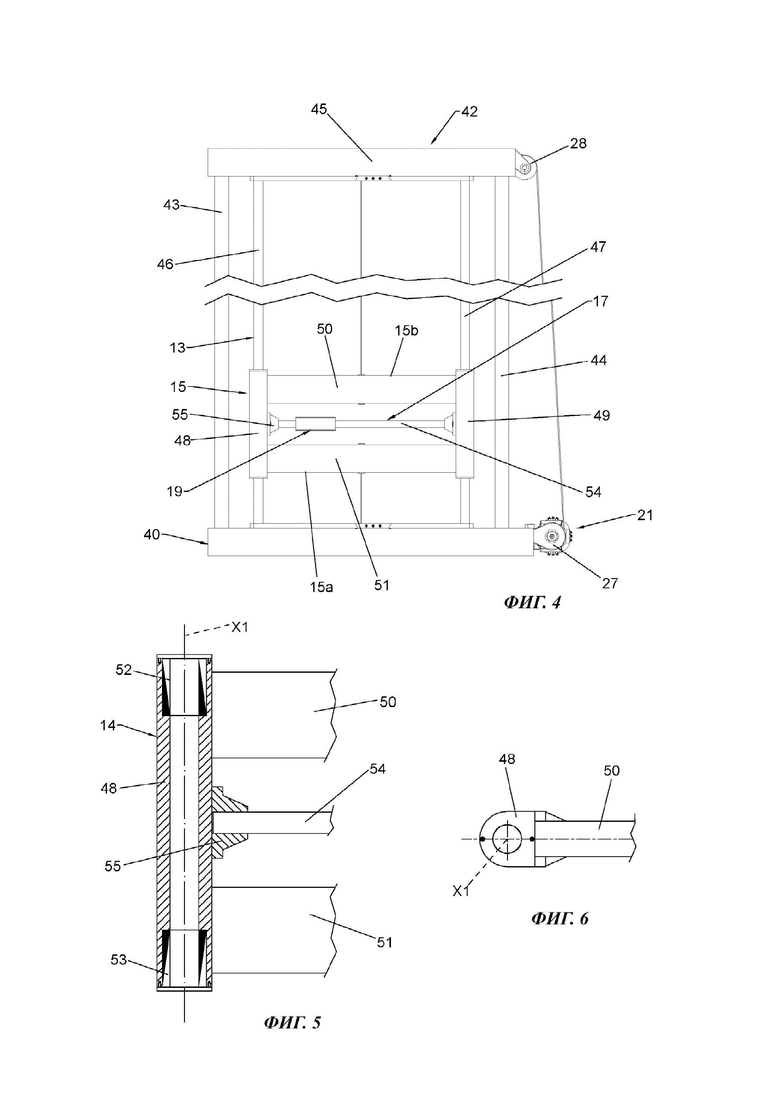
- на фигуре 4 представлен вид сбоку гимнастического тренажера в соответствии с изобретением;
- на фигуре 5 представлен вид в разрезе фрагмента гимнастического тренажера в соответствии с изобретением;
- на фигуре 6 представлен вид сверху фрагмента, показанного на фигуре 5;
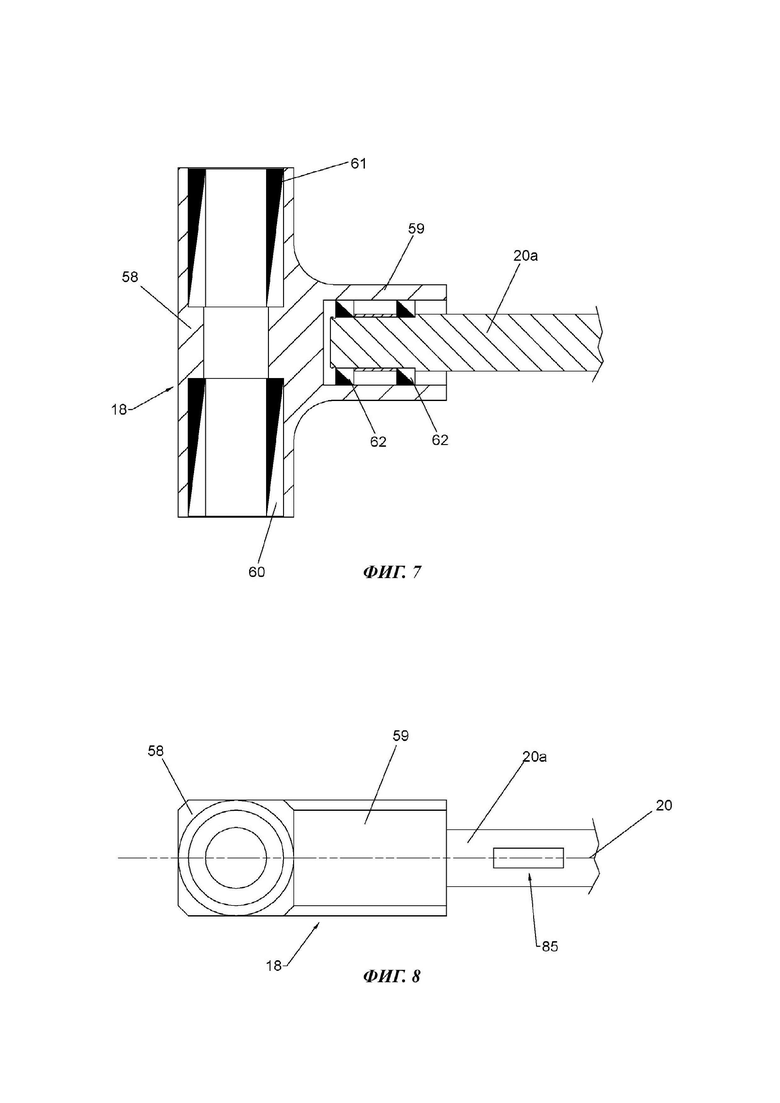
- на фигуре 7 представлен вид в разрезе другого фрагмента гимнастического тренажера в соответствии с изобретением;
- на фигуре 8 представлен вид спереди фрагмента с фигуры 7;
- на фигуре 9 представлена схема работы гимнастического тренажера в соответствии с изобретением;
- на фигуре 10 представлен схематический вид варианта осуществления изобретения.
Осуществление изобретения
На описанных выше фигурах гимнастический тренажер для тяжелой атлетики в соответствии с изобретением показан в целом позицией 10.
Указанный гимнастический тренажер 10 содержит:
- несущую раму 11,
- две противоположные первые боковые направляющие 12 и 13, проходящие вверх-вниз, расположенные в соответствии с первым направлением Х1,
- два первых суппорта 14 и 15, каждый из которых с возможностью скольжения закреплен на соответствующей первой боковой направляющей 12 и 13,
- две противоположные вторые боковые направляющие 16 и 17, расположенные в соответствии со вторым направлением Х2, поперечным указанному первому направлению Х1, и каждая из которых расположена на одном из указанных первых суппортов 14 и 15,
- два вторых суппорта 18 и 19, каждый из которых с возможностью скольжения закреплен на соответствующей второй боковой направляющей 16 и 17,
- подъемный стержень 20, причем каждый из концов 20а, 20b указанного подъемного стержня 20 прикреплен к соответствующему второму суппорту 18 и 19,
- моторизованные передаточные средства 21, выполненные с возможностью приложения к указанным первым суппортам 14 и 15 либо силы, противоположной направленной вверх толкающей силе, либо силы, противоположной направленной вниз силе тяги.
В варианте осуществления изобретения, описанного в настоящей заявке, в качестве неограничивающего примера самого изобретения, несущая рама 11 содержит опорное основание 40, такое как четырехугольная рама, внутри которой расположен пользователь.
От опорного основания 40 отходят два противоположных выступа 41 и 42, поддерживающих первые боковые направляющие 12 и 13.
В настоящем примерном варианте осуществления каждый из выступов 41 и 42 содержит две стойки 43 и 44 и верхнюю поперечину 45.
В настоящем примерном варианте осуществления первое направление Х1 является по существу вертикальным, т.е. за исключением неизбежных допусков конструкции и монтажа.
Две противоположные первые боковые направляющие 12 и 13 содержат каждая по две перекладины 46 и 47, соответственно, которые проходят между основанием 40 и вышележащей поперечиной 45.
Первые боковые направляющие 12 и 13 расположены каждая в пределах дуги, образованной стойками 43 и 44 и поперечиной 45.
Два первых суппорта 14 и 15, как четко показано на виде сбоку на фигуре 4 и на виде в разрезе на фигуре 5, каждый, содержат:
- две первые ползунковые втулки 48 и 49,
- по меньшей мере один поперечный элемент, например два поперечных элемента 50 и 51, жестко соединяющие две ползунковые втулки 48 и 49.
Первые ползунковые втулки 48 и 49 скользят по соответствующим перекладинам 46 и 47 первых боковых направляющих 12 и 13 путем помещения одного или более устройств 52 и 53 для уменьшения трения, например, одного или более линейных шарикоподшипников с рециркуляцией, выделенных на фиг.5.
В настоящем примерном варианте осуществления вторые боковые направляющие 16 и 17 каждая содержат направляющую перекладину 54, четко показанную на фигурах 3, 4 и 5, закрепленную кронштейнами 55 между втулками 48 и 49 соответствующих первых суппортов 14 и 15, к которым они принадлежат.
Направляющая перекладина 54 также расположена между двумя поперечными элементами 50 и 51 первого суппорта 14 и 15.
Два вторых суппорта 18 и 19 каждый содержат, как ясно показано для второго суппорта 18 на фиг.7 и 8, вторую ползунковую втулку 58, к которой прикреплено установочное кольцо 59, выполненное с возможностью натягивания на конец 20а или 20b подъемного стержня 20.
Установочное кольцо 59 проходит в соответствии с направлением, ортогональным направлению прохождения и перемещения второй ползунковой втулки 58.
Вторая ползунковая втулка 58 скользит по соответствующей направляющей перекладине 54 соответствующей второй боковой направляющей 16 и 17 путем размещения одного или более устройств 60 и 61 для уменьшения трения, например, одного или более линейных шарикоподшипников с рециркуляцией, выделенных на фиг.7.
Подъемный стержень 20 зажат на концах 20а и 20b в соответствующем установочном кольце 59 второго суппорта 18 и 19, с помощью устройств для уменьшения трения, например подшипников 62 качения.
Такие устройства для уменьшения трения выполнены таким образом, чтобы позволить концам 20а и 20b подъемного стержня 20 поворачиваться на угол менее 10° вокруг оси Х2 направляющей перекладины 54; эта возможность поворота, хотя и скромная, позволяет спортсмену выполнять свои упражнения даже слегка асимметричным образом.
Моторизованные передаточные средства 21 содержат, в настоящем примерном варианте осуществления, два электродвигателя 22 и 23.
Каждый из двух электродвигателей 22 и 23 выполнен с возможностью приведения в действие соответствующего продольно расположенного гибкого элемента 24 и 25.
В варианте, не проиллюстрированном для простоты, но предназначенном для включения в настоящее изобретение, гимнастический тренажер согласно изобретению содержит один электродвигатель, выполненный с возможностью приведения в действие обоих продольно расположенных гибких элементов.
Такие продольно расположенные гибкие элементы 24 и 25 могут содержать ремень, цепь, трос или другие подобные и эквивалентные элементы.
В настоящем примерном варианте осуществления каждый из продольно расположенных гибких элементов 24 и 25 содержит зубчатый ремень.
Моторизованные передаточные средства 21 содержат, для каждого продольно расположенного гибкого элемента 24 и 25, как схематично показано в разрезе на фиг.3:
- по меньшей мере один нижний шкив, например нижний шкив 26, выполненный и расположенный таким образом, чтобы отклонять продольно расположенный гибкий элемент 24 и 25, поступающий от электродвигателя 22 и 23, к нижней части 14а и 15а указанного первого суппорта 14 и 15,
- по меньшей мере один верхний шкив, например два соответствующих верхних шкива 28 и 29; причем указанные верхние шкивы выполнены и расположены таким образом, чтобы отклонять соответствующий продольно расположенный гибкий элемент 24 и 25, в направлении верхней части 14b и 15b первого суппорта 14 и 15,
- приводной шкив 27, закрепленный на соответствующем валу 22 и 23 электродвигателя.
Каждый из продольно проходящих гибких элементов 24 и 25, или, в дальнейшем, ремней 24 и 25 для удобства демонстрации, определяет контур, который развивается, начиная с нижней части 14а и 15а первого суппорта14 и 15, поворачивается вокруг нижнего шкива 26, приводного шкива 27, верхних шкивов 28 и 29, до верхней части 14b и 15b того же первого суппорта.
Таким образом, каждый электродвигатель 22 и 23 с соответствующим продольно проходящим элементом 24 и 25 и соответствующим первым суппортом 14 и 15 создает схему перемещения первого суппорта 14, которая независима от другой схемы перемещения другого первого суппорта 15.
Крепление ремня 24 и 25 к соответствующему первому суппорту 14 и 15 осуществляется с помощью фиксирующих средств, которые следует понимать как средства известного типа.
Таким образом, такие моторизованные передаточные средства 21 содержат два симметричных узла, каждый из которых содержит шкивы 26, 27, 28 и 29 и зубчатый ремень 24 или 25.
Каждый узел связан с первым вертикальным суппортом 14 и 15 и передает вертикальное линейное поступательное движение указанному первому суппорту 14 и 15.
Шкивы действуют как дефлекторы, которые позволяют соответствующему ремню 24 и 25 обходить несущую раму 11 и приводиться в движение электродвигателем 22 и 23 через приводной шкив 27.
Каждый продольно проходящий гибкий элемент 24, 25, в данном случае каждый ремень 24 и 25, имеет соответствующий предохранительный противовес 35.
Такой противовес 35 расположен, например, на вертикальном (проходящем вверх-вниз) участке каждого ремня 24 и 25.
Этот противовес 35 предназначен для того, чтобы его можно было устанавливать также в другом положении.
Указанный противовес 35 выполнен и расположен таким образом, чтобы свести к нулю, при выключенных электродвигателях 22 и 23, вклад веса, создаваемый первыми суппортами 14 и 15 и вторыми суппортами 18 и 19.
Таким образом, при выключенных или неисправных электродвигателях 22 и 23 и неработающих тормозах электродвигателей на спортсмена-пользователя не возлагается нагрузка и обеспечивается его безопасность.
Противовес 35, очевидно, размещен на участке 24а и 25а продольно расположенного гибкого элемента 24 и 25, т.е. ремня 24 и 25, где отсутствует первый суппорт 14 и 15.
В настоящем примерном варианте осуществления противовес 35 прикреплен к ремню 24 и 25 на участке 24а и 25а между приводным шкивом 27 и первым верхним шкивом 28.
Гимнастический тренажер 10 содержит электронный блок 90 управления, выполненный с возможностью управления и регулирования работы указанных моторизованных передаточных средств 21.
Такой электронный блок 90 управления схематически проиллюстрирован рамкой на фиг.1.
Электродвигатели 22 и 23 предпочтительно, но не исключительно, представляют собой электродвигатели бесщеточного типа.
Указанные электродвигатели 22 и 23 могут быть связаны с соответствующим редуктором крутящего момента, который следует понимать, конечно, как редуктор известного типа. Редуктор может быть двухступенчатым или трехступенчатым.
В частности, каждый из электродвигателей 22 и 23 содержит энкодер и встроенный тормоз.
Гимнастический тренажер 10 может также содержать дополнительный датчик скорости для каждого из первых суппортов 14 и 15.
Этот дополнительный датчик способен непосредственно измерять скорость соответствующего первого суппорта 14 и 15.
Энкодер на плате электродвигателя 22 и 23 определяет скорость первого суппорта 14 и 15 косвенно, основываясь на скорости вращения самого диска эн кодера.
Этот дополнительный датчик скорости установлен на тренажере и соединен с электронным блоком 90 управления.
Гимнастический тренажер 10 преимущественно также содержит сигнальное устройство 85, схематично показанное на фиг.1 и 8, выполненное с возможностью подачи сигнала о захвате и высвобождении пользователем указанного подъемного стержня 20, причем указанное сигнальное устройство соединено с указанным электронным блоком 90 управления.
В настоящем примерном варианте осуществления изобретения, который не ограничивается этим, такое сигнальное устройство 85 содержит пару или, альтернативно, две пары элементов, излучатель и приемник, например, фотоэлементы, расположенные на противоположных концах 20а и 20b подъемного стержня 20; например, излучающий фотоэлемент расположен на первом конце 20а, а противоположный приемный фотоэлемент расположен на противоположном конце 20b, или наоборот.
Излучатель и приемник расположены на подъемном стержне 20 в положении, позволяющем обнаруживать присутствие руки на данном подъемном стержне 20.
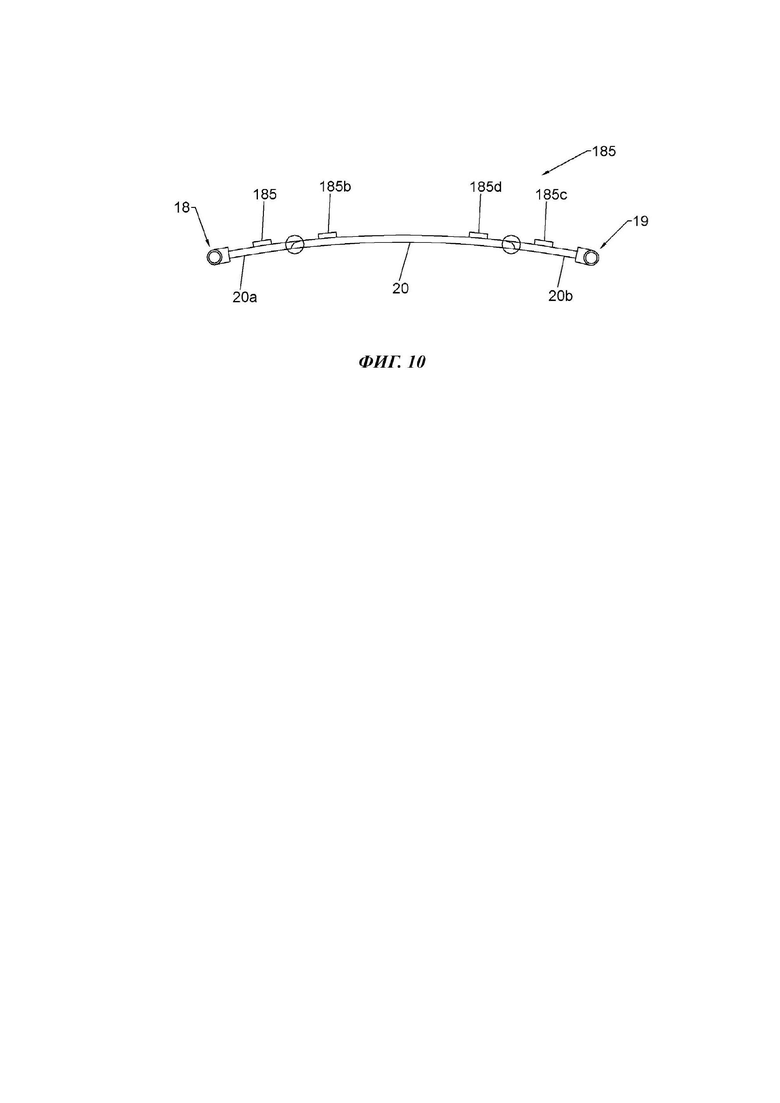
В альтернативном варианте осуществления изобретения, схематично показанном на фиг.10, сигнальное устройство 185 содержит по меньшей мере одну пару элементов, излучатель 185а и приемник 185b, расположенные напротив зоны захвата подъемного стержня 20, чтобы обнаруживать присутствие или отсутствие одной руки спортсмена на подъемном стержне 20.
Еще, в частности, сигнальное устройство 185 содержит две пары элементов, первую пару элементов в виде излучателя 185а и приемника 185b и вторую пару элементов в виде излучателя 185 с и приемника 185d, причем каждая пара элементов расположена так, чтобы обнаруживать присутствие или отсутствие соответствующей руки спортсмена на подъемном стержне.
Это альтернативное решение особенно эффективно и нечувствительно к любому изгибу подъемного стержня 20.
Предпочтительно и преимущественно элементы в виде излучателя и приемника установлены на подъемном стержне 20 со средствами регулировки положения вдоль одного и того же подъемного стержня 20.
Такие средства, которые, как следует понимать, относятся к известному типу, могут представлять собой ленту из пластикового материала или металлическую втулку со средствами для прикрепления к стержню, или другие аналогичные и эквивалентные средства обратимой фиксации.
Возможность перемещения излучателя и приемника вдоль подъемного стержня 20 делает сигнальные устройства 85 и 185 особенно универсальными и легко адаптируемыми к конкретной эргономике спортсмена.
Указанное сигнальное устройство 85 выполнено с возможностью работы таким образом, что сигнал, который проходит непосредственно над подъемной штангой, предпочтительно заподлицо с поверхностью самой подъемной штанги 20, прерывается зажатой рукой спортсмена.
Сигнал остается прерванным до тех пор, пока спортсмен-пользователь не разожмет одну руку или обе руки.
Когда спортсмен-пользователь высвобождает свой захват, по какой-либо причине, когда он разжимает руки, сигнал между излучателем и приемником снова становится активным, сигнализируя о прекращении использования гимнастического тренажера 10.
Предпочтительно, чтобы все электронные компоненты были встроены в систему безопасности.
Сигнальное устройство 85 также соединено с электронным блоком 90 управления.
Электронный блок 90 управления содержит, например, ПЛК.
Указанный электронный блок 90 управления соединен с энкодерами электродвигателей 22 и 23 и посредством указанных энкодеров принимает сигналы, для возможности вычисления положения, скорости и ускорения подъемного стержня 20.
Электронный блок 90 управления содержит систему человеко-машинного интерфейса, например панель с сенсорным экраном; через экран пользователь-спортсмен вмешивается в управление моторизованным передаточным средством 21, определяя нагрузку для физического упражнения по поднятию тяжестей.
Через тот же экран пользователь-спортсмен имеет возможность просматривать и извлекать статистику своей тренировки.
Начало и конец выполнения одного или более упражнений сигнализируются с помощью сигнального устройства 85 наличия захвата, посредством чего сжатие одной руки вокруг подъемного стержня сигнализирует о начале выполнения упражнения, в то время как разжатие, произвольное или непроизвольное, обеих рук приводит к остановке из тренажера 10.
Таким образом, в частности, электронный блок 90 управления позволяет гимнастическому тренажеру 10, посредством действия электродвигателей 22 и 23, воспроизводить действие силы тяжести на подъемный стержень 20, чья нагрузка определяется и устанавливается спортсменом-пользователем через тот же электронный блок 90 управления.
Электронный блок 90 управления выполнен и, следовательно, запрограммирован таким образом, что при включении гимнастического тренажера 10 сначала проверяется исходное состояние подъемного стержня 20, т.е., в частности, его положение.
Как только пользователь-спортсмен выбирает нагрузку, подъемный стержень 20 устанавливается медленными движениями на фиксированную высоту над землей.
Пользователь-спортсмен располагается внутри рамы 11 гимнастического тренажера 10, готовый выполнить свое упражнение; пользователь-спортсмен сигнализирует о своем присутствии посредством сигнального устройства 85 наличия захвата и выполняет, при минимальной нагрузке, два повторения; таким образом, тренажер записывает максимальную и минимальную высоты, которых достигает штанга во время реального упражнения.
После выполнения повторений при минимальной нагрузке происходит собственно выполнение упражнения.
Снова через сигнальное устройство 85 наличия захвата спортсмен запрашивает применение нагрузки и начинает тренировку.
Электронный блок 90 управления определяет положение, скорость и ускорение подъемного стержня 20 в режиме реального времени, чтобы выполнять следующие операции:
- запись и анализ результатов спортсмена;
- обнаружение возможной усталости спортсмена, которую гимнастический тренажер 10 должен компенсировать соответствующим и откалиброванным снижением нагрузки, чтобы обеспечить безопасное завершение упражнения;
- обнаружение любых опасных ситуаций, например, столкновения между подъемным стержнем и спортсменом, падения подъемного стержня, потери сознания спортсменом.
Об окончании упражнения сигнализирует разжатие рук спортсмена, в противном случае всегда сжимающих подъемный стержень 20.
Электродвигатели 22 и 23, создавая крутящий момент, натягивают ремни 24 и 25, которые, в свою очередь, оказывают нагрузку на первые вертикальные суппорта 14 и 15. Это - тренировочная нагрузка спортсмена.
Электродвигатели 22 и 23, работающие в соответствии с сигналами, подаваемыми электронным блоком 90 управления, регулируют указанную нагрузку таким образом, чтобы:
- воспроизвести вклад инерции, т.е. увеличение и уменьшение нагрузки, которые спортсмен воспринимает во время ускоряющих и замедляющих этапов движения;
- отрегулировать создаваемую нагрузку, т.е. передаваемый крутящий момент, в случае усталости спортсмена; этот этап является опциональным, выбирается спортсменом и может быть выбран через человеко-машинный интерфейс, т.е. через сенсорный экран электронного блока 90 управления;
- резко остановить подъемный стержень 20 в случае сигнала опасности.
Электронный блок 90 управления обнаруживает присутствие спортсмена с помощью сигнального устройства 85 наличия захвата, а также определяет положение, скорость и ускорение каждого из электродвигателей 22 и 23 с помощью их соответствующих встроенных энкодеров.
Эти сигналы записываются и сохраняются электронным блоком 90 управления в течение всего выполнения упражнения.
Электронный блок 90 управления выполнен таким образом, чтобы сравнивать между одним повторением и предыдущими положение и скорость, чтобы оценить, устает ли спортсмен, и, следовательно, сможет ли он выполнить упражнение самостоятельно; если обнаружена усталость, электронный блок 90 управления подает команду электродвигателям 22 и 23 на уменьшение нагрузки.
Для обеспечения безопасности спортсмена электронный блок 90 управления сконфигурирован на постоянную проверку:
- сигнала сигнального устройства 85, и если сигнал отменен, это означает, что спортсмен отпустил подъемный стержень 20 или потерял сознание;
- положения подъемного стержня 20 так, что, если он опускается ниже нижней мертвой точки НМТ, это означает, что он давит на тело спортсмена;
- скорости подъемного стержня 20, так что, если она высока вблизи нижней мертвой точки НМТ, это означает, что спортсмен не сможет избежать столкновения с этим подъемным стержнем 20;
- и нисходящего ускорения подъемного стержня 20, так что, если оно превышает определенную долю д, при этом д предполагается как ускорение свободного падения, это означает, что штанга свободно падает.
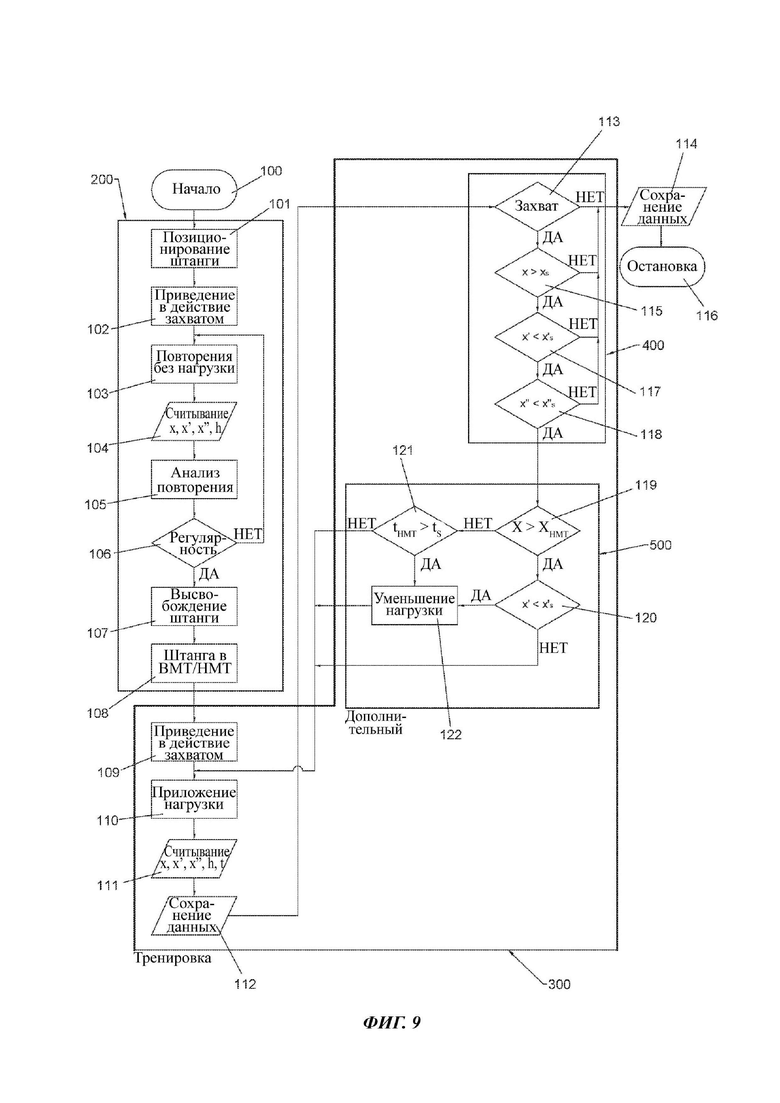
Способ работы гимнастического тренажера 10 согласно изобретению описан ниже и схематично показан на фиг.9.
Этот способ работы включает в себя следующие рабочие этапы:
- запуск тренажера, указанный на фиг.9 в блоке 100; этап подготовки, включающий в себя следующую последовательность действий 200:
- позиционирование штанги, причем штангу поднимают на высоту, установленную спортсменом; данные начальной высоты вводит посредством электронного блока 90 управления спортсмен-пользователь; это позиционирование выполняют гимнастическим тренажером 10 на низкой скорости; кроме того, спортсмен выбирает тип упражнений и рабочей нагрузки; этот этап схематично показан блоком 101;
- приведение в действие сигнального устройства 85 наличия захвата; на этом этапе пользователь-спортсмен, готовый выполнить упражнение, захватывает подъемный стержень 20, тем самым активируя сигнальное устройство 85, которое сигнализирует о присутствии руки на подъемном стержне 20, позволяя пользователю-спортсмену выполнять упражнение; этот этап схематично показан блоком 102;
- осуществление по меньшей мере двух, предпочтительно трех, повторений движений упражнения пользователем-спортсменом без нагрузки, чтобы обучить или побудить электронный блок 90 управления запомнить положение верхней мертвой точки ВМТ и нижней мертвой точки НМТ хода подъемного стержня 20, то есть точки максимального и минимального подъема, которые, как ожидается, подъемная штанга 20 достигнет во время выполнения упражнения; этот этап схематично показан блоком 103;
- считывание значений; электронный блок 90 управления обнаруживает активацию сигнального устройства 85 наличия захвата, обозначенного символом "h", положение х, скорость х' и ускорение х''; этот этап схематично показан блоком 104;
- анализ повторений и проверка того, что выполняемые повторения являются регулярными, то есть что повторения имеют одинаковые ВМТ и одинаковые НМТ; этот этап схематично показан блоком 105;
- если предыдущий этап анализа обнаруживает регулярность повторений, то пользователь-спортсмен высвобождает подъемный стержень 20, позволяя сигналу поступить в сигнальное устройство 85; этот этап высвобождения подъемного стержня 20 схематично показан блоком 107; эта операция управления схематично показана блоком 106 управления;
- если предыдущий этап анализа не обнаруживает регулярность повторений, то пользователь-спортсмен снова выполняет повторения в соответствии с блоком 103; эта операция управления схематично показана блоком 106 управления;
- после высвобождения подъемного стержня 20 происходит позиционирование самого подъемного стержня 20 по выбору спортсмена в верхней или нижней мертвой точке; этот этап схематично показан блоком 108.
Указанным этапом 108 заканчивается этап 200 подготовки.
За этапом 200 подготовки следует этап 300 обучения.
Указанный этап 300 обучения включает в себя следующие рабочие этапы:
- приведение в действие сигнального устройства 85 захвата руками; на этом этапе пользователь-спортсмен, готовый выполнить упражнение, захватывает подъемный стержень 20, прерывая сигнал между излучателем и приемником и, тем самым активируя сигнальное устройство 85, которое сигнализирует о присутствии руки на подъемном стержне 20, позволяя пользователю-спортсмену выполнять упражнение; этот этап схематично показан блоком 109;
- приложение нагрузки, то есть электродвигатели 22 и 23 создают крутящий момент и достигают тренировочной нагрузки, включая вклады инерции; этот этап схематично показан блоком 110;
- считывание параметров положения х, скорости х', ускорения х'' и времени t после активации гимнастического тренажера 10 посредством сигнального устройства 85 наличия захвата, т.е. электронный блок 90 управления обнаруживает прерывание сигнала между излучателем и приемником сигнального устройства 85, обозначенное символом h, а также определяет положение х, скорость х' и ускорение х'' подъемного стержня 20 и время t выполнения упражнения; этот этап схематично показан блоком 111;
- сохранение данных, то есть электронный блок 90 управления выполняет сохранение информации; этот этап схематично показан блоком 112. Этап 300 обучения содержит цикл операций 400 по обеспечению безопасности, который всегда повторяется до этапа 116 остановки, связанного с завершением упражнения.
Этот цикл операций 400 по обеспечению безопасности включает в себя следующие рабочие этапы:
- проверка наличия по меньшей мере одной руки спортсмена на подъемном стержне 20 с помощью сигнального устройства 85; этот этап схематично показан блоком 113 управления;
- если сигнальное устройство 85 сигнализирует, что на подъемном стержне 20 нет рук, то выполняется сохранение данных, схематично показанное блоком 114, и тренажер останавливается, что схематично показано блоком 116;
- если сигнальное устройство 85 сигнализирует о наличии рук на подъемном стержне 20, то проверяется, является ли высота х подъемного стержня выше или ниже порогового значения Xs для сдавливания тела спортсмена; этот этап схематично показан блоком 115 управления;
- если высота х подъемного стержня ниже порогового значения Xs сдавливания тела спортсмена, то выполняется сохранение данных, см. блок 114, и упражнение останавливается, см. блок 116;
- если высота х подъемного стержня 20 превышает пороговое значение Xs, и, следовательно, упражнение выполняется в заданных пределах безопасности, то проверяется, превышает ли направленная вниз скорость х' подъемного стержня 20 пороговое значение Xs'; этот этап схематично показан блоком 117 управления;
- если направленная вниз скорость х' больше, чем указанное пороговое значение Xs', то выполняется сохранение данных, см. блок 114, и остановка упражнения, см. блок 116;
- если направленная вниз скорость х' меньше, чем указанное пороговое значение Xs', и, следовательно, упражнение выполняется в заданных пределах безопасности, то проверяется, выше ли направленное вниз ускорение х'' подъемного стержня 20, чем пороговое значение Xs'' падения подъемного стержня 20; этот этап схематично показан блоком 118 управления;
- если направленное вниз ускорение х'' больше, чем указанное пороговое значение Xs'', то выполняется сохранение данных, см. блок 114, и остановка упражнения, см. блок 116;
- если направленное вниз ускорение х'' меньше, чем указанное пороговое значение Xs'', то упражнение продолжают с этапа приложения нагрузки, см. блок 110, или задействуют вспомогательный этап 500 возможного уменьшения нагрузки упражнения.
Указанный вспомогательный этап 500 включает в себя следующие рабочие этапы:
- проверка положения х подъемного стержня 20 относительно положения нижней мертвой точки ХНМТ, схематично показанная блоком 119 управления;
- если положение х находится выше ХНМТ, то проверяется, падает ли скорость х' подъемного стержня 20 ниже порогового значения Xs', близкого к нулю перед ВМТ, что схематично показано блоком 120 управления;
- если положение х не возвращается выше ХНМТ, то проверяется, превышает ли время t пребывания в НМТ пороговое значение ТНМТ, т.е. проверяется, успешно или неудачно спортсмен поднимает нагрузку обратно вверх; этот этап схематично показан блоком 121 управления;
- если скорость х' подъемного стержня 20 падает ниже порогового значения Xs', близкого к нулю перед ВМТ, то выполняют уменьшение нагрузки, что схематично показано блоком 122;
- если время пребывания t в НМТ больше порогового значения ТНМТ, то выполняют снижение нагрузки, см. блок 122.
Когда нагрузка уменьшается, этап 300 тренировки возобновляют с этапа приложения нагрузки, см. блок 110.
Таким образом, электронный блок 90 управления сконфигурирован так, чтобы уменьшать нагрузку при заданных обстоятельствах и прерывать упражнение, сохраняя при этом данные упражнения в каждом конкретном случае.
Уменьшение нагрузки может иметь ограниченную продолжительность, на самом деле очень часто спортсмену после минимальной помощи удается самостоятельно возобновить выполнение упражнения, или оно может быть постоянным, например, в частности, если уменьшение нагрузки уже происходило несколько раз во время одного и того же упражнения.
На практике было установлено, что настоящее изобретение обеспечивает выполнение поставленных задач и достижение целей.
В частности, посредством настоящего изобретения был разработан безопасный гимнастический тренажер, который может использоваться спортсменом без присутствия помощников в случае необходимости, поскольку одно и то же моторизованное передаточное средство 21, управляемое электронным блоком 90 управления, прикладывает нагрузку к подъемному стержню 20 и сохраняет ее на том же уровне в случае травмы или усталости спортсмена.
Кроме того, посредством настоящего изобретения был разработан гимнастический тренажер, который позволяет исключить простои при замене, снятии или добавлении грузов, действия, типичные для использования штанг, известных на сегодняшний день, поскольку является гимнастическим тренажером, лишенным масс, подлежащих замене, добавлению или удалению.
Кроме того, посредством настоящего изобретения был разработан гимнастический тренажер, способный непрерывно и точно определять результаты спортсмена.
Изобретение, раскрытое таким образом, может быть подвергнуто многочисленным модификациям и вариациям, все из которых находятся в рамках идеи изобретения; более того, все детали могут быть заменены другими технически эквивалентными элементами.
На практике могут использоваться любые компоненты и материалы, а также любые размеры и условные формы в соответствии с требованиями и уровнем техники, при условии, что они совместимы с конкретным применением.
Если характеристики и методы, упомянутые в каком-либо пункте формулы изобретения, сопровождаются номерами позиций, эти номера позиций предназначены только для повышения понятности формулы изобретения и, следовательно, такие номера позиций не оказывают ограничивающего влияния на интерпретацию каждого элемента, идентифицированного в качестве примера из этих номеров позиций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОРТИВНЫЙ ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ МЫШЦ ГРУДИ, ДЕЛЬТОВИДНОЙ МЫШЦЫ, КОСТИ-ТРАПЕЦИИ И ТРЕХГЛАВОЙ МЫШЦЫ | 2005 |
|
RU2329843C2 |
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНЫХ НАВЫКОВ СПОРТСМЕНА | 2017 |
|
RU2657994C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТРЕНАЖЕР | 2023 |
|
RU2825045C1 |
| Способ определения величины динамической нагрузки на группы мышц спортсмена в процессе выполнения упражнений на грузоблочном тренажере | 2023 |
|
RU2826347C1 |
| Устройство для тренировки гимнастов | 1987 |
|
SU1574229A1 |
| ТРЕНАЖЕР | 1992 |
|
RU2067468C1 |
| КОМБИНИРОВАННЫЙ КОМНАТНЫЙ ТРЕНАЖЕР | 1992 |
|
RU2050881C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| КОМБИНИРОВАННЫЙ ТРЕНАЖЕР ИСЕЛИДЗЕ | 1993 |
|
RU2045302C1 |
| СПОСОБ И УСТРОЙСТВО САМОСТОЯТЕЛЬНОГО ОБУЧЕНИЯ ТЕХНИКЕ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2020 |
|
RU2747874C1 |
Настоящее изобретение относится к гимнастическому тренажеру (10) для тяжелой атлетики, содержащему: несущую раму (11), две противоположные первые боковые направляющие (12, 13), проходящие вверх-вниз, расположенные в соответствии с первым направлением (Х1), два первых суппорта (14, 15), каждый из которых с возможностью скольжения закреплен на соответствующей первой боковой направляющей (12, 13), две противоположные вторые боковые направляющие (16, 17), расположенные в соответствии со вторым направлением (Х2), поперечным указанному первому направлению (Х1), и каждая из которых расположена на одном из указанных первых суппортов (14, 15), два вторых суппорта (18, 19), каждый из которых с возможностью скольжения закреплен на соответствующей второй боковой направляющей (16, 17), подъемный стержень (20), причем каждый из концов (20а, 20b) указанного подъемного стержня (20) прикреплен к соответствующему второму суппорту (18, 19), моторизованные передаточные средства (21), выполненные с возможностью приложения к указанным первым суппортам (14, 15) либо силы, противоположной направленной вверх толкающей силе, либо силы, противоположной направленной вниз силе тяги. 2 н. и 11 з.п. ф-лы, 10 ил.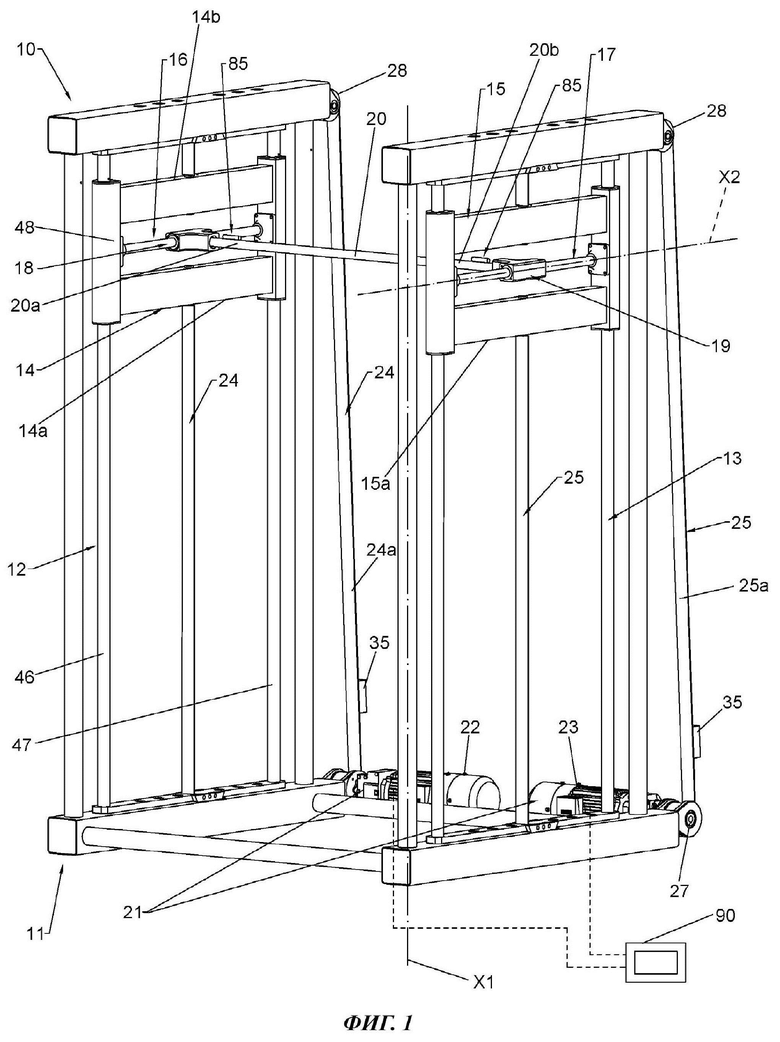
1. Гимнастический тренажер (10) для тяжелой атлетики, содержащий:
- несущую раму (11),
- две противоположные первые боковые направляющие (12, 13), проходящие вверх-вниз, расположенные в соответствии с первым направлением (Х1),
- два первых суппорта (14, 15), каждый из которых с возможностью скольжения закреплен на соответствующей первой боковой направляющей (12, 13),
- две противоположные вторые боковые направляющие (16, 17), расположенные в соответствии со вторым направлением (Х2), поперечным указанному первому направлению (Х1), и каждая из которых расположена на одном из указанных первых суппортов (14, 15),
- два вторых суппорта (18, 19), каждый из которых с возможностью скольжения закреплен на соответствующей второй боковой направляющей (16, 17),
- подъемный стержень (20), причем каждый из концов (20а, 20b) указанного подъемного стержня (20) прикреплен к соответствующему второму суппорту (18, 19),
- моторизованные передаточные средства (21), выполненные с возможностью приложения к указанным первым суппортам (14, 15) либо силы, противоположной направленной вверх толкающей силе, либо силы, противоположной направленной вниз силе тяги,
отличающийся тем, что указанные моторизованные передаточные средства (21) содержат два электродвигателя (22, 23), каждый из которых выполнен с возможностью приведения в действие соответствующего продольно расположенного гибкого элемента (24, 25),
причем каждый продольно расположенный гибкий элемент (24, 25) соединен первым концом с нижней частью (14а, 15а) первого суппорта (14, 15), а вторым противоположным концом соединен с верхней частью (14b, 15b) того же первого суппорта (14, 15),
причем указанные моторизованные передаточные средства (21) содержат для каждого продольно расположенного гибкого элемента (24, 25):
- по меньшей мере один нижний шкив (26), выполненный и расположенный с возможностью отклонения продольно расположенного гибкого элемента (24, 25), поступающего от указанного электродвигателя (22, 23), в направлении указанной нижней части (14а, 15а) указанного первого суппорта (14, 15),
- по меньшей мере один верхний шкив (28, 29, 30, 31), выполненный и расположенный с возможностью отклонения указанного продольно расположенного гибкого элемента (24, 25) в направлении верхней части (14b, 15b) указанного первого суппорта (14, 15).
2. Гимнастический тренажер по п. 1, отличающийся тем, что он дополнительно содержит дополнительный датчик скорости для каждого из первых суппортов (14, 15).
3. Гимнастический тренажер по любому из предыдущих пунктов, отличающийся тем, что содержит электронный блок (90) для управления работой указанных моторизованных передаточных средств (21).
4. Гимнастический тренажер по любому из предыдущих пунктов, отличающийся тем, что указанные электродвигатели (22, 23) представляют собой электродвигатели бесщеточного типа.
5. Гимнастический тренажер по любому из предыдущих пунктов, отличающийся тем, что каждый из указанных электродвигателей (22, 23) содержит энкодер и встроенный тормоз.
6. Гимнастический тренажер по любому из предыдущих пунктов, отличающийся тем, что указанные продольно расположенные гибкие элементы (24, 25) содержат ремень, цепь, трос или другие подобные и эквивалентные элементы.
7. Гимнастический тренажер по любому из предыдущих пунктов, отличающийся тем, что он содержит сигнальное устройство (85) для выдачи сигнала о захвате и высвобождении пользователем указанного подъемного стержня (20), причем указанное сигнальное устройство (85) соединено с указанным электронным блоком (90) управления.
8. Гимнастический тренажер по любому из предыдущих пунктов, отличающийся тем, что каждый продольно расположенный гибкий элемент (24, 25) имеет предохранительный противовес (35).
9. Гимнастический тренажер по п. 3, отличающийся тем, что указанный электронный блок (90) управления выполнен с возможностью постоянной проверки:
- сигнала указанного сигнального устройства (85),
- положения указанного подъемного стержня (20),
- скорости указанного подъемного стержня (20),
- направленного вниз ускорения указанного подъемного стержня (20).
10. Способ эксплуатации гимнастического тренажера (10) по любому из пп. 1-9, отличающийся тем, что он включает в себя следующие рабочие этапы:
- запуск тренажера (100);
- этап подготовки, включающий в себя следующую последовательность действий (200):
- позиционирование штанги (101), при этом штангу, то есть указанный подъемный стержень (20), приводят на высоту, заданную спортсменом;
- приведение в действие (102) сигнального устройства (85) наличия захвата, которое сигнализирует о присутствии руки на подъемном стержне (20), позволяя спортсмену-пользователю выполнять упражнение;
- осуществление по меньшей мере двух повторений (103) движений упражнения спортсменом-пользователем без нагрузки, чтобы обучить или побудить электронный блок управления (90) запомнить положение верхней мертвой точки (ВМТ) и нижней мертвой точки (НМТ) хода подъемного стержня (20), то есть точек максимального и минимального подъема, которых, как ожидается, достигнет подъемный стержень (20) во время упражнения;
- считывание значений (104) электронным блоком (90) управления, который обнаруживает активацию (h) сигнального устройства (85) наличия захвата, положение (х), скорость (х') и ускорение (х'') указанного подъемного стержня (20);
- анализ повторений и проверка того, что выполняемые повторения являются регулярными (105), то есть что повторения имеют одинаковые нижние мертвые точки (НМТ) и одинаковые верхние мертвые точки (ВМТ);
- если на предыдущем этапе (105) анализа обнаружена регулярность повторений (106), то пользователь-спортсмен высвобождает (107) подъемный стержень (20), позволяя сигналу поступить в сигнальное устройство (85);
- если на предыдущем этапе (105) анализа не обнаружена регулярность повторений (106), то пользователь-спортсмен выполняет повторения снова (103);
- после высвобождения подъемного стержня (20) выполняют позиционирование (108) подъемного стержня (20) в верхней мертвой точке (ВМТ) или нижней мертвой точке (НМТ).
11. Способ по п. 10, отличающийся тем, что за указанным этапом (200) подготовки следует этап (300) тренировки, причем указанный этап (300) тренировки включает в себя следующие рабочие этапы:
- приведение в действие (109) сигнального устройства (85) наличия захвата;
- приложение (110) нагрузки, то есть электродвигатели (22, 23) обеспечивают крутящий момент и достигают тренировочной нагрузки;
- считывание (111) параметров положения (х), скорости (х'), ускорения (х'') и времени (t), при этом после активации гимнастического тренажера (10) посредством сигнального устройства (85) наличия захвата указанный электронный блок (90) управления обнаруживает прерывание сигнала между излучателем и приемником сигнального устройства (85) и определяет положение (х), скорость (х') и ускорение (х'') указанного подъемного стержня (20) и время (t) выполнения упражнения;
сохранение (112) данных, то есть электронный блок (90) управления выполняет сохранение информации.
12. Способ по предыдущему пункту, отличающийся тем, что указанный этап (300) тренировки содержит цикл операций (400) по обеспечению безопасности, который всегда повторяют до этапа (116) остановки, связанного с завершением упражнения.
13. Способ по предыдущему пункту, отличающийся тем, что указанный цикл операций (400) по обеспечению безопасности включает в себя следующие рабочие этапы:
- проверка (113) наличия по меньшей мере одной руки спортсмена на подъемном стержне (20) с помощью указанного сигнального устройства (85);
- если сигнальное устройство (85) сигнализирует о том, что на подъемном стержне (20) нет рук, то выполняют сохранение (114) данных и тренажер останавливают (116);
- если сигнальное устройство (85) сигнализирует о наличии рук на подъемном стержне (20), то проверяют то, является ли высота (х) подъемного стержня (20) выше или ниже порогового значения (Xs) для сдавливания тела (115) спортсмена;
- если высота (х) подъемного стержня (20) ниже порогового значения (Xs) для сдавливания тела спортсмена, то выполняют сохранение (114) данных и остановку (116) упражнения;
- если высота (х) подъемного стержня (20) превышает пороговое значение (Xs), и, следовательно, упражнение выполняют в заданных пределах безопасности, то проверяют (117), превышает ли направленная вниз скорость (х') подъемного стержня (20) пороговое значение (Xs');
- если направленная вниз скорость (х') больше, чем указанное пороговое значение (Xs'), то выполняют сохранение (114) данных и остановку (116) упражнения;
- если направленная вниз скорость (х') меньше, чем указанное пороговое значение (Xs'), и, следовательно, упражнение выполняют в заданных пределах безопасности, то проверяют (118), превышает ли направленное вниз ускорение (х'') подъемного стержня (20) пороговое значение (Xs'') падения подъемного стержня (20);
- если направленное вниз ускорение (х'') больше, чем указанное пороговое значение (Xs''), то выполняют сохранение (114) данных и остановку (116) упражнения;
- если направленное вниз ускорение (х'') меньше, чем указанное пороговое значение (Xs''), то упражнение продолжают этапом (110) приложения нагрузки или задействуют вспомогательный этап (500) возможного уменьшения нагрузки упражнения.
| US 2020023227 A1, 23.01.2020 | |||
| KR 102053685 B1, 09.12.2019 | |||
| US 6749538 B2, 15.06.2004 | |||
| CN 205586423 U, 21.09.2016. |

