Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления и способу управления для двигателя внутреннего сгорания.
2. Описание предшествующего уровня техники
[0002] В целом, устройство управления для двигателя внутреннего сгорания выполняется с возможностью определять управляющий входной сигнал для двигателя внутреннего сгорания посредством управления с обратной связью, так что выходное значение величины управления согласуется с целевым значением, в случае, когда целевое значение предоставляется относительно величины управления для двигателя внутреннего сгорания. Во многих случаях фактического управления двигателем внутреннего сгорания, однако, присутствуют различные ограничения технических средств и управления относительно количественного параметра состояния двигателя внутреннего сгорания. В случае, когда эти ограничения не удовлетворяются, может возникать отказ технических средств и отклонение в характеристике управления. Возможность удовлетворения ограничений, а также возможность согласования выходного значения с целевым значением, является одной из важных характеристик, требуемых для управления двигателем внутреннего сгорания.
[0003] Эталонный регулятор является эффективным средством для удовлетворения требования. Эталонный регулятор снабжается прогностической моделью, которая моделирует систему с замкнутым контуром (систему управления с обратной связью), которая включает в себя управляемый объект и контроллер обратной связи, и прогнозирует будущее значение количественного параметра состояния, на которое накладывается ограничение, с помощью прогностической модели. Затем, целевое значение величины управления для двигателя внутреннего сгорания модифицируется на основе прогнозируемого значения количественного параметра состояния и ограничения, наложенного на него.
[0004] Предшествующий уровень техники, на котором эталонный регулятор применяется к управлению двигателем внутреннего сгорания, уже был описан в публикации японской патентной заявки № 2013-084091 и публикации японской патентной заявки № 2014-084845. Устройство управления, относящееся к предшествующему уровню техники, снабжается контроллером обратной связи и эталонным регулятором. Контроллер обратной связи определяет величину действия исполнительного устройства (регулируемое сопло и дроссельная заслонка турбины переменной емкости) посредством управления с обратной связью, так что фактическое значение конкретного количественного параметра состояния (давления наддува и эффективности наполнения) двигателя внутреннего сгорания становится ближе к целевому значению. Эталонный регулятор прогнозирует будущую траекторию конкретного количественного параметра состояния с помощью прогностической модели, которая моделирует динамическую характеристику системы с замкнутым контуром, относящуюся к управлению с обратной связью как "время нечувствительности плюс колебательная система второго порядка", и модифицирует целевое значение так, что ограничение удовлетворяется.
Сущность изобретения
[0005] В эталонном регуляторе, описанном выше, выполняется вычисление в режиме реального времени с помощью прогностической модели. Это обусловлено тем, что двигатель внутреннего сгорания устанавливается на транспортное средство, и модификация целевого значения должна быть основана не на вычислении в автономном режиме, а на вычислении в режиме реального времени для того, чтобы удовлетворять ограничение, когда целевое значение конкретного количественного параметра состояния изменяется от момента к моменту вследствие рабочего состояния и условия эксплуатации транспортного средства. Однако, арифметическая емкость устройства управления, установленного на транспортном средстве, не настолько большая, как объем вычислений, требуемый для вычисления в режиме реального времени с помощью прогностической модели. Соответственно, вычислительная нагрузка на устройство управления может становиться большой в случае, когда вычисление в режиме реального времени с помощью прогностической модели реализуется в установленном в транспортном средстве устройстве управления.
[0006] Вычислительная нагрузка на устройство управления увеличивается, когда диапазон прогнозирования будущей траектории конкретного количественного параметра состояния расширяется. В отношении этого момента, диапазон прогнозирования будущей траектории конкретного количественного параметра состояния с помощью прогностической модели задается в сумму времени нечувствительности прогностической модели и половины цикла колебания вторичной колебательной системы в устройстве управления, описанном выше. Это является преимущественным в том, что вычисление для прогнозирования будущей траектории конкретного количественного параметра состояния выполняется, только когда необходимо. Однако, прогнозирование в заданное время прогнозирования может приводить в результате к отклонению в точности прогнозирования и консервативной модификации целевого значения.
[0007] Изобретение предоставляет устройство управления и способ управления для двигателя внутреннего сгорания, с помощью которых вычислительная нагрузка, применяемая к устройству управления, которое выполняет вычисление в режиме реального времени с помощью прогностической модели, уменьшается, и модификация целевого значения может быть точно выполнена.
[0008] Первый аспект изобретения относится к устройству управления для двигателя внутреннего сгорания, устройство управления выполнено с возможностью управлять конкретным количественным параметром состояния двигателя внутреннего сгорания посредством функционирования исполнительного устройства. Устройство управления включает в себя: контроллер обратной связи, выполненный с возможностью определять величину действия исполнительного устройства посредством управления с обратной связью, так что фактическое значение количественного параметра состояния становится ближе к целевому значению; и эталонный регулятор, выполненный с возможностью модифицировать целевое значение количественного параметра состояния так, что ограничение, накладываемое на количественный параметр состояния, удовлетворяется. Ограничение удовлетворяется, когда величина изменения в количественном параметре состояния в единицу времени равна или меньше верхнего предельного значения β. Эталонный регулятор (34) выполняется с возможностью вычислять модифицированное целевое значение как значение, полученное посредством сложения одного из 

[0009] Второй аспект изобретения относится к способу управления для двигателя внутреннего сгорания, в котором конкретный количественный параметр состояния двигателя внутреннего сгорания управляется посредством действия исполнительного устройства. Способ управления включает в себя: определение величины действия исполнительного устройства посредством управления с обратной связью, так что фактическое значение количественного параметра состояния становится ближе к целевому значению; и модификацию целевого значения количественного параметра состояния так, что ограничение, накладываемое на количественный параметр состояния, удовлетворяется. Ограничение удовлетворяется, когда величина изменения в количественном параметре состояния в единицу времени равна или меньше верхнего предельного значения β. Модификация целевого значения количественного параметра включает в себя вычисление модифицированного целевого значения как значения, полученного посредством сложения одного из 
[0010] Количественный параметр состояния может быть температурой пакета дизельного сажевого фильтра, распложенного в выхлопном канале дизельного двигателя, и исполнительное устройство может быть устройством, добавляющим топливо выше по потоку от дизельного сажевого фильтра в выхлопном канале.
[0011] Согласно конфигурации, описанной выше, вычислительная нагрузка, применяемая к устройству управления, выполняющему вычисление в режиме реального времени с помощью прогностической модели, выраженной как время нечувствительности плюс колебательная система второго порядка, может быть уменьшена, и модификация целевого значения может быть точно выполнена.
Краткое описание чертежей
[0012] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
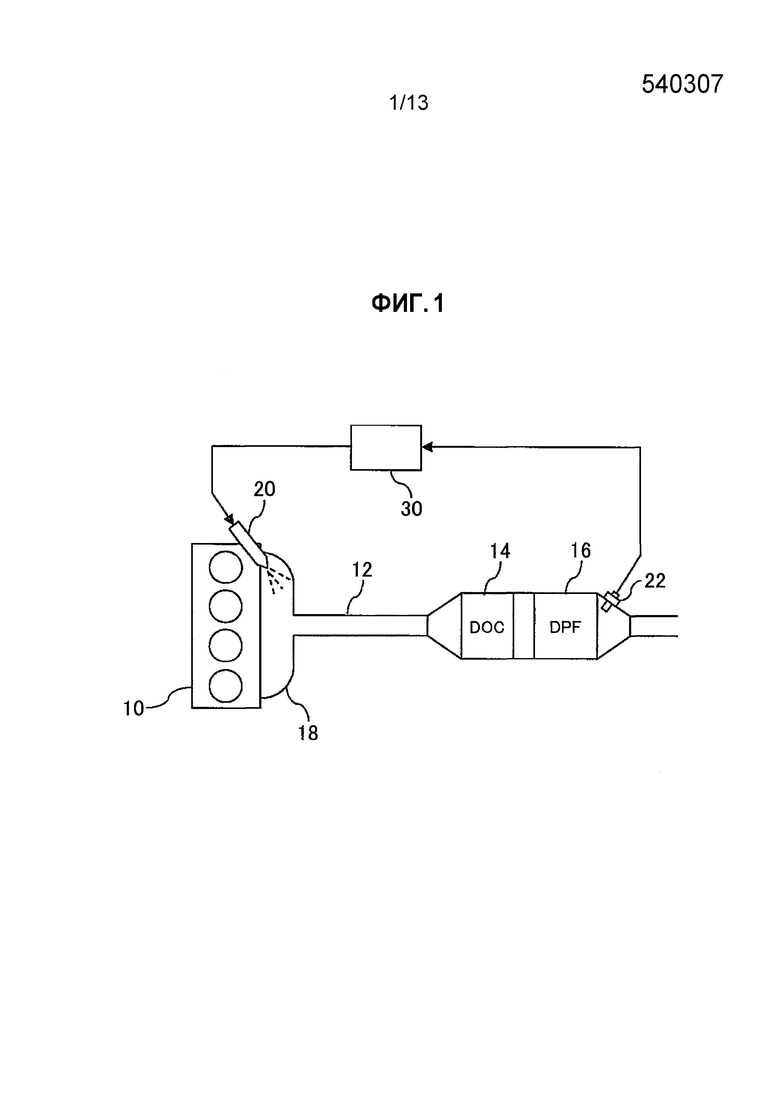
Фиг. 1 - это схематичный чертеж, иллюстрирующий конфигурацию системы нейтрализации отработавшего газа для дизельного двигателя;
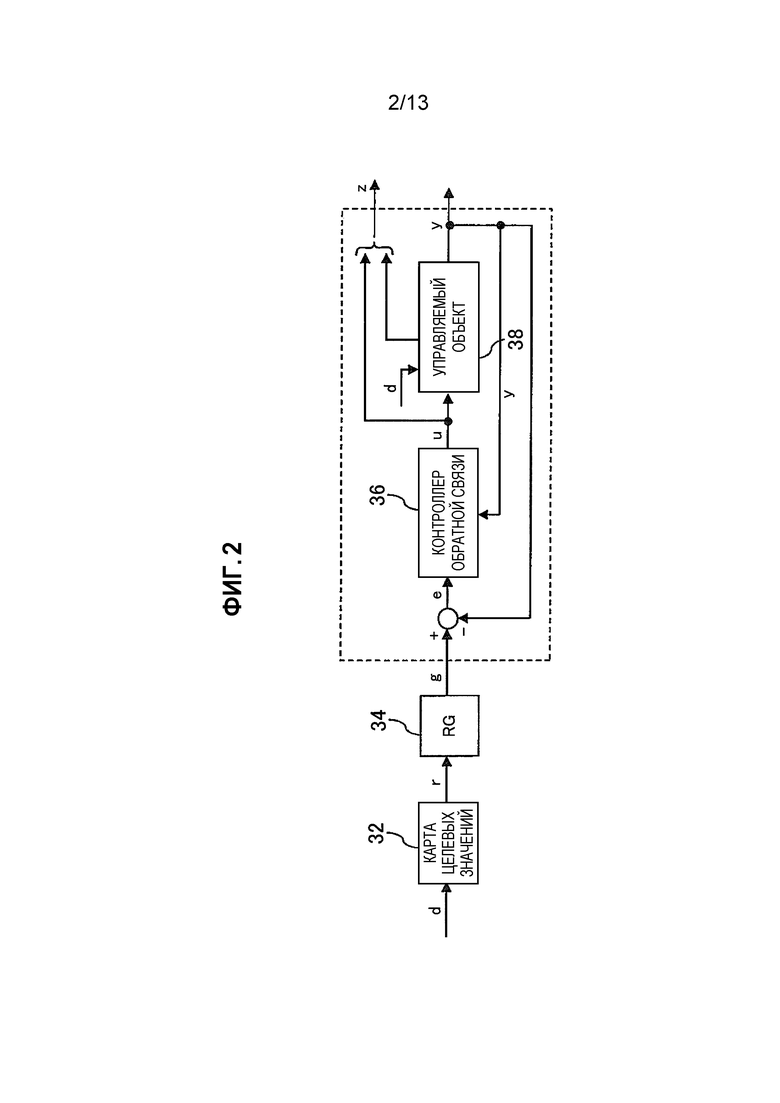
Фиг. 2 - это схема, иллюстрирующая структуру контроля за соблюдением целевого параметра для дизельного двигателя в ECU 30;
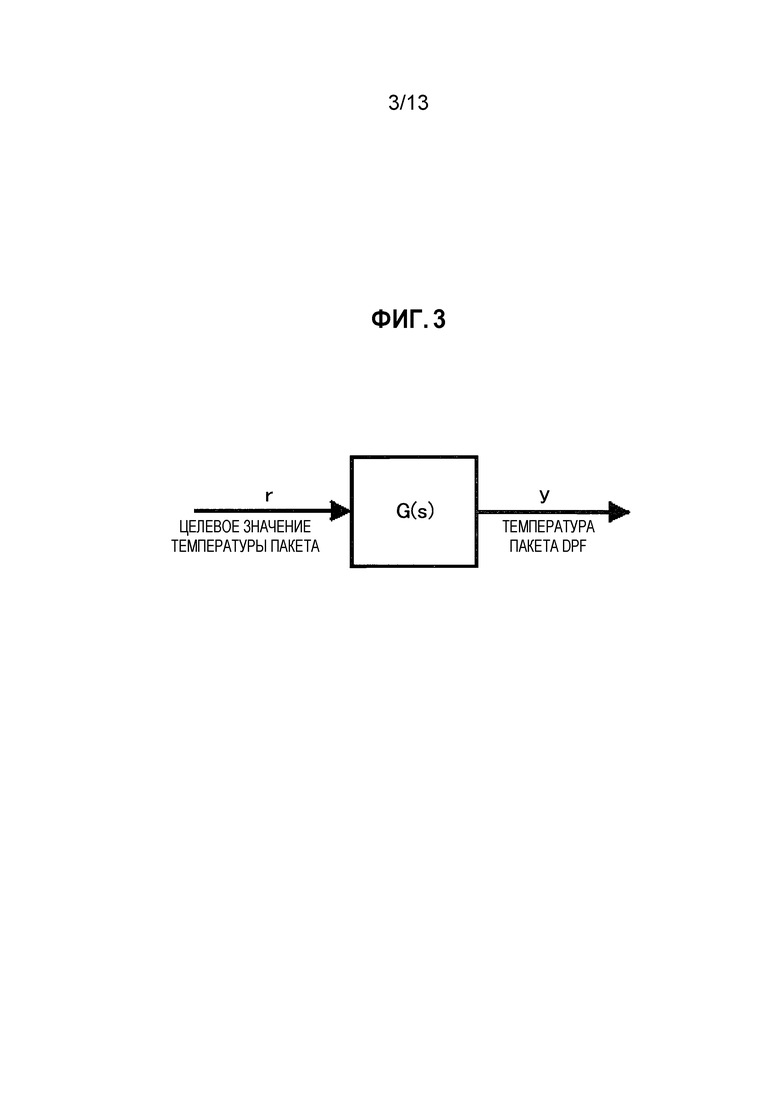
Фиг. 3 - это схема, иллюстрирующая модель системы с замкнутым контуром, относящейся к управлению с обратной связью, которая окружена пунктирной линией на фиг. 2;
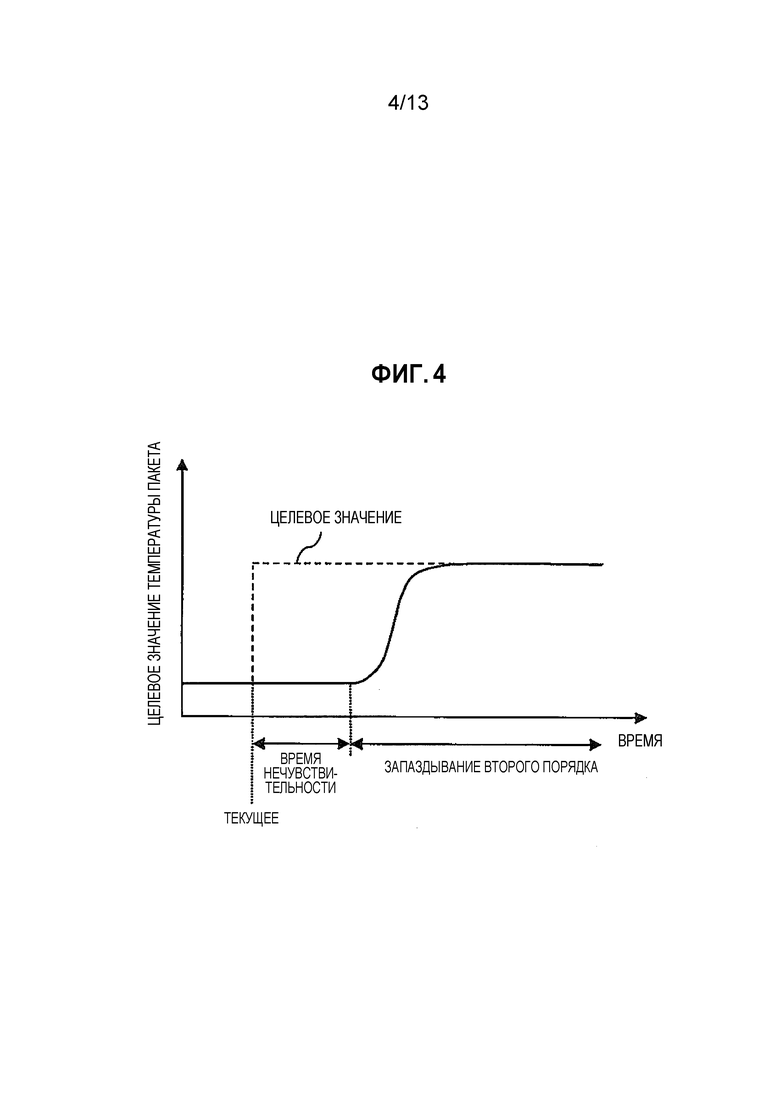
Фиг. 4 - это схема, иллюстрирующая модель системы с замкнутым контуром, относящейся к управлению с обратной связью, которая окружена пунктирной линией на фиг. 2;
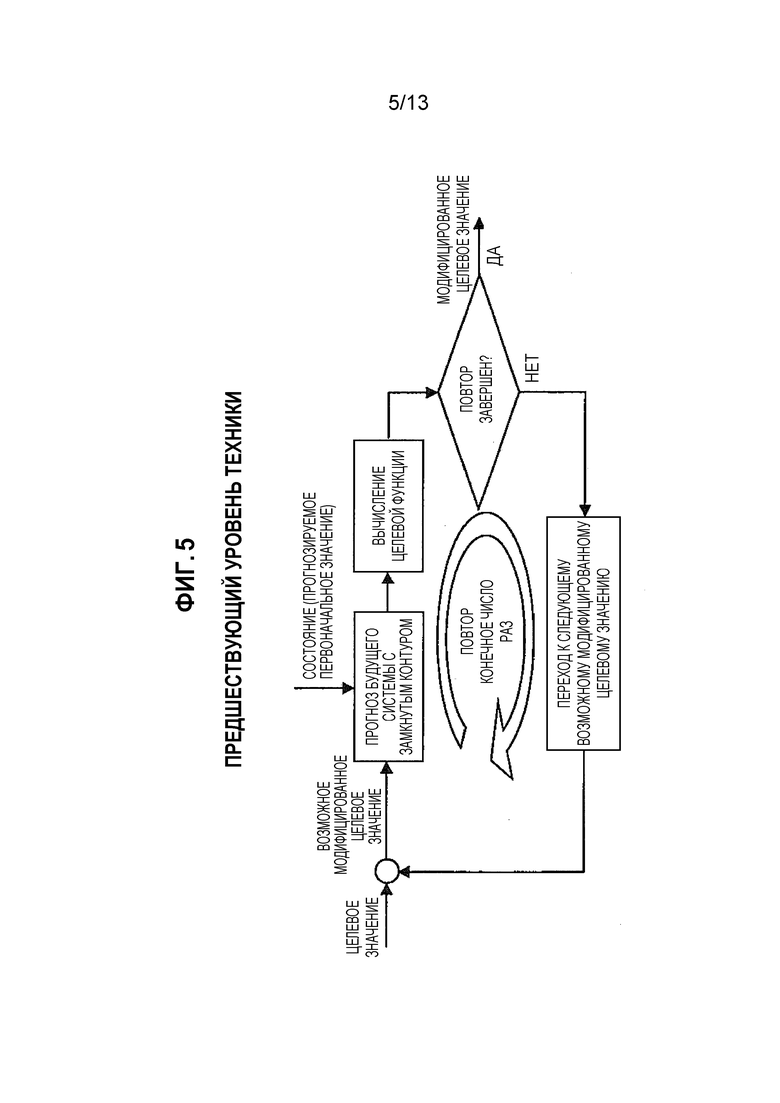
Фиг. 5 - это схема для показа проблемы алгоритма эталонного регулятора предшествующего уровня техники;
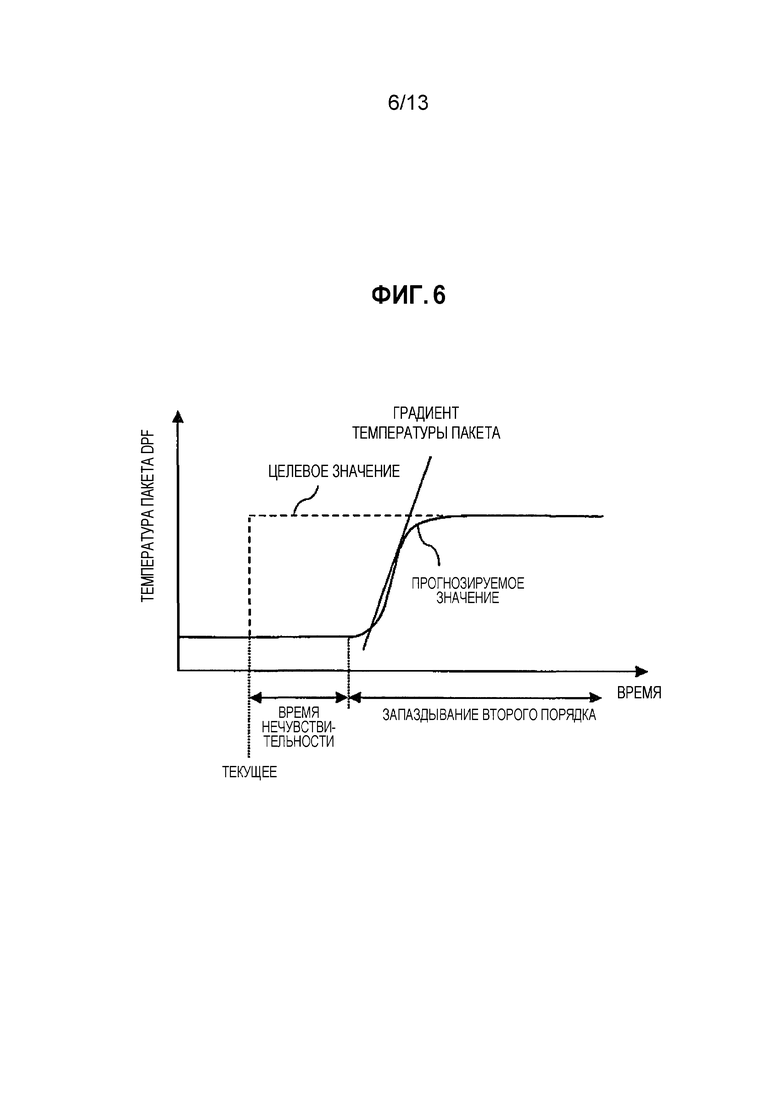
Фиг. 6 - это график для показа величины изменения в температуре пакета DPF в единицу времени во время управления нагревом для DPF 16;
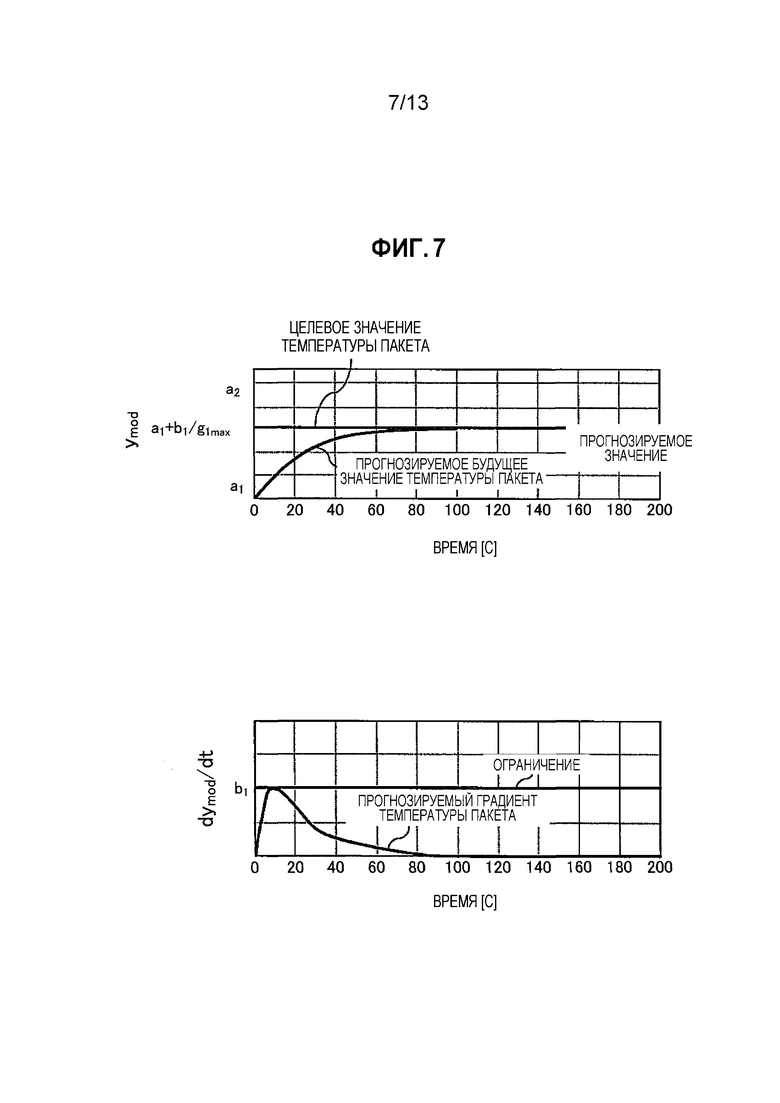
Фиг. 7 - это график, иллюстрирующий результат численного моделирования, свойственного случаю, когда первоначальное целевое значение модифицируется на основе уравнения (18);
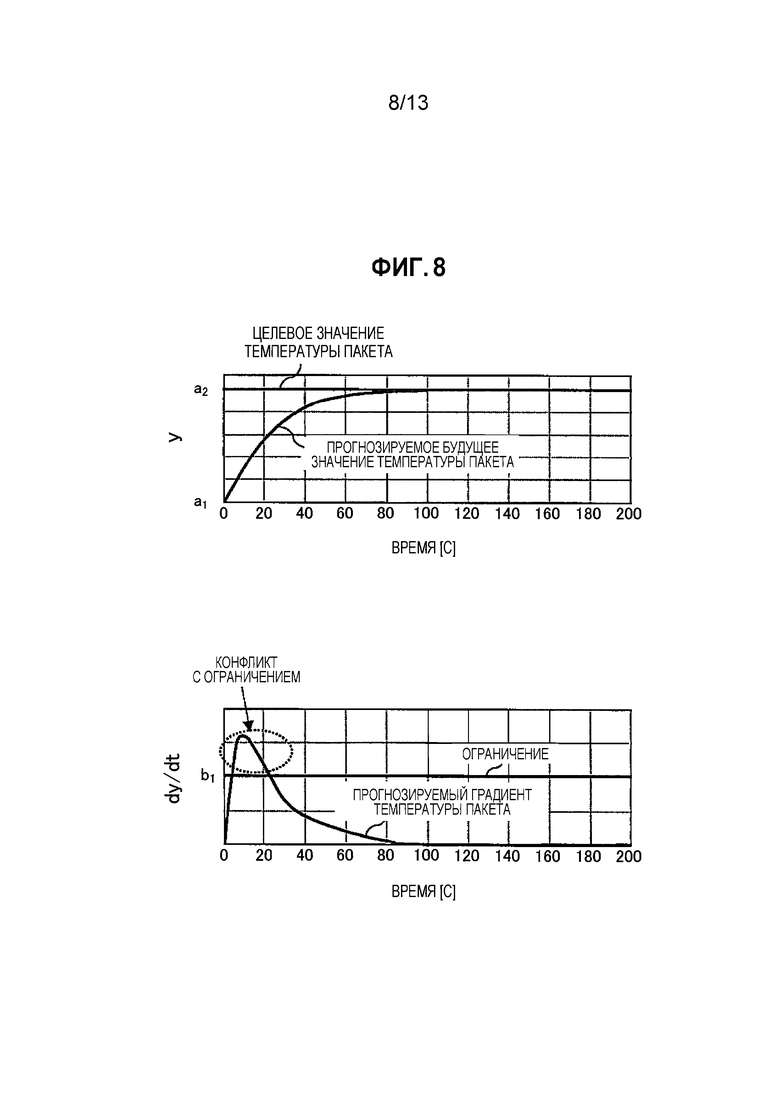
Фиг. 8 - это график, иллюстрирующий результат численного моделирования, свойственного случаю, когда первоначальное целевое значение не модифицируется;
Фиг. 9 - это схема, иллюстрирующая алгоритм эталонного регулятора согласно первому варианту осуществления;
Фиг. 10 - это график для показа проблемы первого варианта осуществления;
Фиг. 11 - это график, иллюстрирующий результат построения графика уравнения (20);
Фиг. 12 - это график, иллюстрирующий результат численного моделирования, свойственного случаю, когда первоначальное целевое значение модифицируется на основе уравнения (23); и
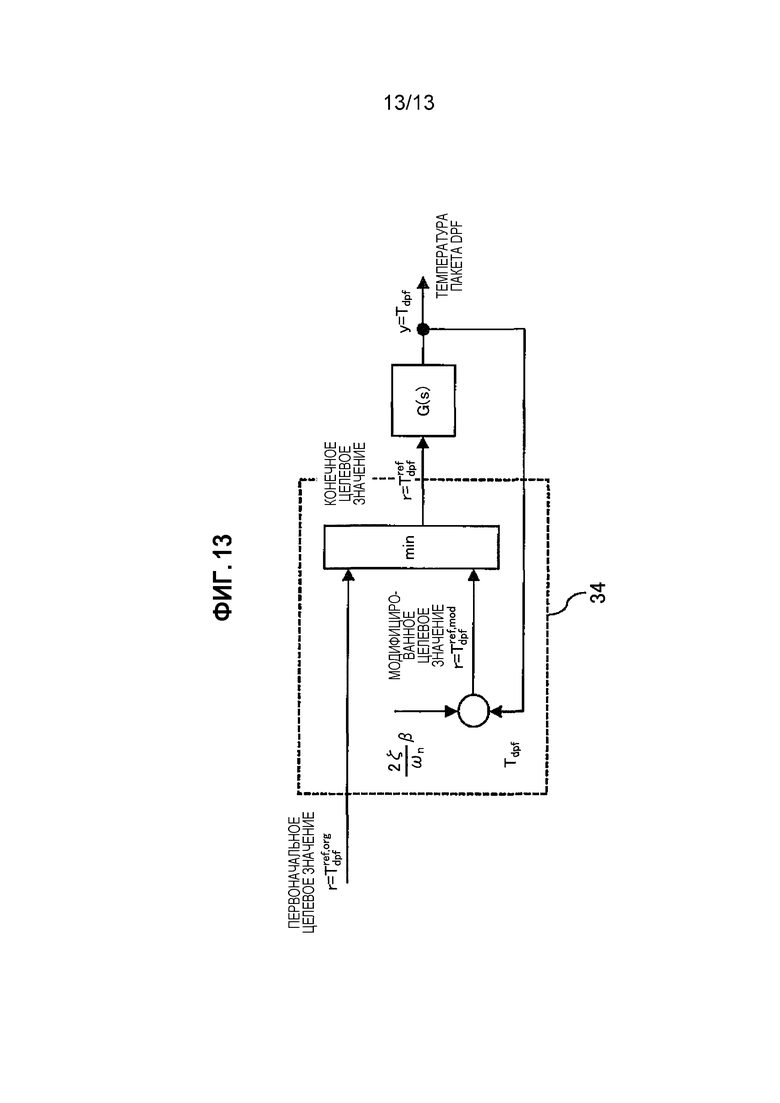
Фиг. 13 - это схема, иллюстрирующая алгоритм эталонного регулятора согласно второму варианту осуществления.
Подробное описание вариантов осуществления
[0013] Далее в данном документе варианты осуществления изобретения будут описаны со ссылкой на сопровождающие чертежи. На чертежах аналогичные ссылочные номера будут использованы, чтобы ссылаться на аналогичные элементы, и повторяющееся описание будет опущено. Изобретение не ограничено вариантами осуществления, описанными ниже.
[0014] Сначала, первый вариант осуществления изобретения будет описан со ссылкой на фиг. 1-9.
[0015] Устройство управления согласно первому варианту осуществления управляет системой нейтрализации отработавшего газа для двигателя внутреннего сгорания, который устанавливается в транспортном средстве. Фиг. 1 - это схематичный чертеж, иллюстрирующий конфигурацию системы нейтрализации отработавшего газа для двигателя внутреннего сгорания. Система нейтрализации отработавшего газа, которая иллюстрируется на фиг. 1, предусматривается с дизельным двигателем 10 в качестве двигателя внутреннего сгорания, каталитическим нейтрализатором дизельного топлива (DOC) 14 и дизельным сажевым фильтром (DPF) 16, расположенным в выхлопном канале 12 дизельного двигателя 10, устройством 20 добавления топлива, расположенным в выпускном отверстии 18, и датчиком 22 температуры, расположенным выше по потоку от DPF 16. DOC 14 является каталитическим нейтрализатором, который преобразует углеводород (HC) и окись углерода (CO), содержащиеся в отработавшем газе, в воду (H2O) и двуокись углерода (CO2) посредством окисления. DPF 16 - это фильтр, который собирает компоненты в виде частиц, содержащихся в отработавшем газе. Устройство 20 добавления топлива выполняется с возможностью добавлять топливо выше по потоку от DOC 14. Датчик 22 температуры выполняется с возможностью измерять температуру пакета DPF 16 (далее в данном документе также называемую "температурой пакета DPF").
[0016] Система нейтрализации отработавшего газа, которая иллюстрируется на фиг. 1, также снабжается электронным блоком управления (ECU) 30. ECU 30 снабжается оперативным запоминающим устройством (RAM), постоянным запоминающим устройством (ROM), центральным процессором (CPU) в качестве микропроцессора и т.п. (которые не иллюстрируются в данном документе). Программа алгоритма эталонного регулятора (описанного позже) хранится в ROM в ECU 30.
[0017] В целом, топливо и масло, используемые в дизельном двигателе, содержат серу, и, таким образом, сернистое соединение (SOx) формируется в результате сгорания топлива. Когда SOx формируется в дизельном двигателе 10, сформированное SOx адсорбируется на DPF 16, и накапливающая функция DPF 16 снижается. В первом варианте осуществления управление нагревом для DPF 16 выполняется посредством ECU 30, так что накапливающая функция может быть восстановлена. В частности, управление нагревом для DPF 16 является управлением для повышения температуры пакета DPF до температуры, находящейся в диапазоне от 300°C до 700°C, посредством добавления топлива в выхлопную систему из устройства 20 добавления топлива. Управление нагревом для DPF 16 предоставляет возможность десорбции SOx из DPF 16 и высвобождения в атмосферу.
[0018] Когда величина изменения температуры пакета DPF в единицу времени в течение управления нагревом для DPF 16 (далее в данном документе также называемая "градиентом температуры пакета") является большой, концентрация SOx, десорбируемого из DPF 16, временно увеличивается, и десорбированное SOx высвобождается в атмосферу в видимом состоянии, т.е., в состоянии белого дыма. В первом варианте осуществления ограничение (верхнее предельное значение β (°C/с)) накладывается на градиент температуры пакета во время управления нагревом для DPF 16, так что белый дым предотвращается.
[0019] ECU 30 снабжается структурой управления, которая инструктирует согласование температуры пакета DPF с целевым значением, в то же время поддерживая градиент температуры пакета во время управления нагревом для DPF 16 в или ниже верхнего предельного значения β. Эта структура управления является структурой контроля за соблюдением целевого значения, которая иллюстрируется на фиг. 2. Как иллюстрировано на фиг. 2, структура контроля за соблюдением целевого значения снабжается картой целевых значений (MAP) 32, эталонным регулятором (RG) 34 и контроллером 36 обратной связи.
[0020] Когда внешний входной сигнал d, который указывает условие работы дизельного двигателя 10, предоставляется, карта 32 целевых значений выводит целевое значение r для температуры пакета DPF, которое является величиной управления. Внешний входной сигнал d включает в себя расход отработавшего газа (массовый расход) через DPF 16 и температуру отработавшего газа выше по потоку от DPF 16. Эти физические величины, которые включены во внешний входной сигнал d, могут быть измеренными значениями или расчетными значениями.
[0021] Эталонный регулятор 34 модифицирует целевое значение температуры пакета DPF посредством вычисления в режиме реального времени, так что различные ограничения технических средств или управления удовлетворяются. В частности, когда целевое значение r температуры пакета DPF предоставляется, эталонный регулятор 34 модифицирует целевое значение r так, что ограничение, относящееся к градиенту температуры пакета, удовлетворяется, и выводит модифицированное целевое значение g для температуры пакета DPF. На фиг. 2 ограниченный сигнал z, который является управляющим входным сигналом или управляющим выходным сигналом, означает градиент температуры пакета. Как описано выше, верхнее предельное значение β накладывается на градиент z температуры пакета.
[0022] Когда модифицированное целевое значение g температуры пакета DPF предоставляется от эталонного регулятора 34, контроллер 36 обратной связи получает текущее значение y для температуры пакета DPF, выведенное от температурного датчика 22, и определяет управляющий входной сигнал u, который должен быть предоставлен управляемому объекту 38 посредством управления с обратной связью, на основе отклонения между модифицированным целевым значением g и текущим значением y. В первом варианте осуществления управляемым объектом является система нейтрализации отработавшего газа, и, таким образом, величина действия устройства 20 добавления топлива (т.е., объем топлива, который добавляется в выхлопную систему посредством устройства 20 добавления топлива) используется в качестве управляющего входного сигнала u. Спецификации контроллера 36 обратной связи не ограничиваются, и известный контроллер обратной связи может быть использован в качестве контроллера 36 обратной связи. Например, пропорционально-интегральный контроллер обратной связи может быть использован в качестве контроллера 36 обратной связи.
[0023] Фиг. 3 - это схема, иллюстрирующая модель системы с замкнутым контуром, относящейся к управлению с обратной связью, которая окружена пунктирной линией на фиг. 2; Фиг. 4 - это график, иллюстрирующий динамическую характеристику этой системы с замкнутым контуром. Как иллюстрировано на фиг. 3, эта модель системы с замкнутым контуром выполняется как прогностическая модель, которая выводит температуру y пакета DPF, когда вводится целевое значение r для температуры пакета DPF (первоначальное целевое значение r или модифицированное целевое значение g). В этой прогностической модели динамическая характеристика системы с замкнутым контуром моделируется как "время нечувствительности плюс колебательная система второго порядка (запаздывание второго порядка)", как иллюстрировано на фиг. 4. Эта прогностическая модель выражается как следующая формула (1) модели с помощью передаточной функции G(s), которая иллюстрируется на фиг. 3.
В частности, G(s) в уравнении (1) выражается как следующее уравнение (2). В уравнении (2) "s" представляет дифференциальный оператор, "ζ" представляет коэффициент затухания, "ωn" представляет собственную частоту угловых колебаний, а "L" представляет время нечувствительности.
[0024] Далее в данном документе проблема алгоритма эталонного регулятора предшествующего уровня техники будет описана со ссылкой на фиг. 5. Как и с первым вариантом осуществления, этот алгоритм повторяет прогнозирование будущего целевого значения конечное число раз посредством вычисления в режиме реального времени с помощью прогностической модели, которая моделирует динамическую характеристику системы с замкнутым контуром. В этом алгоритме предшествующего уровня техники, однако, поиск оптимального значения для целевой функции с помощью модифицированного возможного целевого значения в качестве переменной выполняется в дополнение к прогнозированию будущего целевого значения с помощью прогностической модели, и, таким образом, вычислительная нагрузка, накладываемая на ECU, имеет тенденцию увеличиваться. Кроме того, модификация целевого значения может быть выполнена консервативным образом в случае, когда поиск оптимального значения для целевой функции прерывается в конечном числе раз.
[0025] Изобретатель настоящей заявки уделил внимание проблеме и обнаружил, что оптимально модифицированное целевое значение может быть вычислено в режиме реального времени посредством математического будущего прогнозирования. Фиг. 6 - это график для показа градиента температуры пакета, который должен быть отмечен в настоящей заявке. Ясно по фиг. 6, что время нечувствительности не влияет на градиент температуры пакета в случае, когда динамическая характеристика системы с замкнутым контуром моделируется как время нечувствительности плюс колебательная система второго порядка (запаздывание второго порядка). Это показывает, что время нечувствительности может быть проигнорировано в вычислении градиента температуры пакета, и градиент температуры пакета может быть определен на основе лишь характеристики запаздывания второго порядка.
[0026] В уравнении (2) характеристика запаздывания второго порядка выражается как ωn2/s2+2ζωns+ωn2, а характеристика времени нечувствительности выражается как e-Ls. В случае, когда градиент температуры пакета выражается исключительно с помощью характеристики запаздывания второго порядка, уравнение (1) может быть выражено как уравнение (3).
[0027] Когда уравнение (3) дополнительно модифицируется на основе T1=˗1/p1 и T2=-1/p2, p1 и p2 являются решениями квадратного уравнения (s2+2ζωns+ωn2=0), относящегося к s, принадлежащего к случаю, когда знаменатель с правой стороны уравнения (3) равен 0, получается уравнение (4) (

[0028] Когда формула обратного преобразования Лапласа, показанная в уравнении (5), применяется к уравнению (4), получается уравнение (6), которое указывает градиент температуры пакета.

[0029] В случае, когда градиент температуры пакета максимизируется (достигает максимального градиента), значение производной по времени уравнения (6) равно нулю, и, таким образом, уравнение (7) получается посредством дифференцирования по времени обеих сторон уравнения (6).
[0030] Для того, чтобы уравнение (7) удовлетворялось, значение в скобках с правой стороны уравнения (7) может быть нулевым. Соответственно, получается уравнение (8).
[0031] Уравнение (9) и уравнение (10) получаются, когда уравнение (8) дополнительно модифицируется.
[0032] Время tmax, которое затрачивается на то, чтобы градиент температуры пакета максимизировался после инициирования управления нагревом для DPF 16, может быть выражено как в уравнении (11) с помощью уравнения (10), модифицированного относительно t.
[0033] Уравнение (12) получается, когда уравнение (6) организуется с помощью уравнения (11).
 (12)
(12)
[0034] Во время tmax коэффициент знаменателя с правой стороны уравнения (12) максимизируется, и, таким образом, максимальное значение g1max градиента температуры пакета относительно реакции на ступенчатое возмущение может быть выражено как в уравнении (13). Кроме того, уравнение (14) удовлетворяется во время tmax относительно r с правой стороны уравнения (12), и, таким образом, получается уравнение (15). В уравнении (14) Tdpfref представляет целевое значение температуры пакета DPF, а Tdpf представляет температуру пакета DPF.


[0035] Ограничение, описанное выше, удовлетворяется, когда градиент температуры пакета во время tmax равен или меньше верхнего предельного значения β. Другими словами, выражение (16) удовлетворяется в случае, когда удовлетворяется ограничение.

[0036] Выражение (17) получается, когда выражение (16) организуется относительно целевого значения Tdpfref температуры пакета DPF.
[0037] Соответственно, ограничение, относящееся к градиенту температуры пакета, теоретически удовлетворяется, когда целевое значение Tdpfref температуры пакета DPF модифицируется на основе уравнения (18), полученного из уравнения (17). В уравнении (18) Tdpfref,mod представляет модифицированное целевое значение температуры пакета DPF, а Tdpf представляет текущую температуру пакета DPF.
[0038] Результат модификации целевого значения на основе уравнения (18) будет описан со ссылкой на фиг. 7 и 8. Фиг. 7 - это график, иллюстрирующий результат численного моделирования, свойственного случаю, когда первоначальное целевое значение модифицируется на основе уравнения (18). Фиг. 8 - это график, иллюстрирующий результат численного моделирования, свойственного случаю, когда первоначальное целевое значение не модифицируется. Численные моделирования на фиг. 7 и 8 выполняются с помощью формулы модели уравнения (1), принимая текущую температуру Tdpf пакета DPF в качестве a1 и верхнее предельное значение β в качестве b1 (каждое из a1 и b1 является фиксированным значением), прогнозируя будущее значение температуры пакета DPF посредством ввода целевого значения Tdpfref температуры пакета DPF во время 0 (целевое значение Tdpfref является константой в периодах моделирования) и прогнозируя градиент температуры пакета из спрогнозированного будущего значения.
[0039] В случае, когда a2 (фиксированное значение) вводится в качестве целевого значения Tdpfref температуры пакета DPF во время 0 (фиг. 8), прогнозируемое значение градиента температуры пакета превышает верхнее предельное значение β и конфликтует с ограничением. В случае, когда Tdpf +β/g1max (=a1+b1/g1max) вводится в качестве целевого значения Tdpfref для температуры пакета DPF во время 0 (фиг. 7), прогнозируемое значение градиента температуры пакета равно или меньше верхнего предельного значения β, и ограничение удовлетворяется. Это означает, что ограничение, относящееся к градиенту температуры пакета, удовлетворяется в модификации целевого значения на основе уравнения (18).
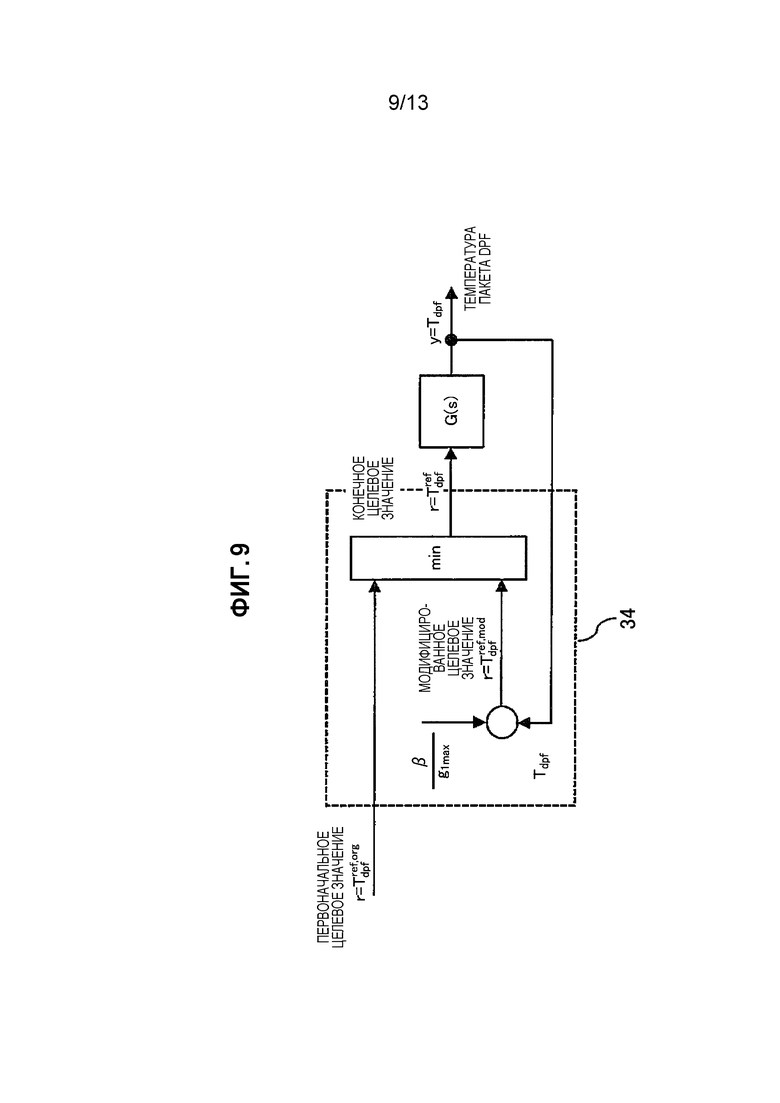
[0040] Фиг. 9 - это схема, иллюстрирующая алгоритм эталонного регулятора согласно первому варианту осуществления. В первом варианте осуществления, меньшее из первоначального целевого значения Tdpfref,org температуры пакета DPF и модифицированного целевого значения Tdpfref,mod температуры пакета DPF определяется в качестве конечного целевого значения r=Tdpfref, когда выполняется управление нагревом для DPF 16, как иллюстрировано на фиг. 9. Модифицированное целевое значение Tdpfref,mod вычисляется как значение, которое получается посредством сложения β/g1max с текущей температурой Tdpf пакета DPF (уравнение (18)).
[0041] В первом варианте осуществления целевое значение температуры пакета DPF может быть модифицировано, в то время как ограничение, относящееся к градиенту температуры пакета, удовлетворяется, на основе вычисления в режиме реального времени с помощью уравнения (18), которое математически получается, как описано выше. С этой модификацией целевого значения на основе уравнения (18) прогнозирование будущего целевого значения и поиск оптимального значения для целевой функции, описанный со ссылкой на фиг. 5, не должны выполняться, и, таким образом, вычислительная нагрузка, накладываемая на ECU 30, может быть значительно уменьшена.
[0042] Согласно первому варианту осуществления градиент целевой температуры во время управления нагревом для DPF 16 поддерживается равным или ниже верхнего предельного значения β, как описано выше. Однако, результаты, аналогичные результатам первого варианта осуществления, могут быть достигнуты, даже когда DPF 16 заменяется на DOC 14. Это обусловлено тем, что SOx, формируемое в дизельном двигателе 10, может адсорбироваться на DOC 14, SOx десорбируется из DOC 14, когда управление нагревом выполняется для DOC 14, концентрация SOx, десорбированного из DOC 14, временно увеличивается, когда величина изменения в температуре пакета DOC 14 в единицу времени в течение управления нагревом является большой, и десорбированное SOx высвобождается в атмосферу в состоянии белого дыма. Этот пример модификации может также быть аналогично применен относительно второго варианта осуществления (описан позже).
[0043] В первом варианте осуществления система нейтрализации отработавшего газа для дизельного двигателя была описана в качестве управляемого объекта. Однако, алгоритм эталонного регулятора, аналогичный алгоритму первого варианта осуществления, может быть создан даже в случае, когда другая система, способная моделировать динамическую характеристику системы с замкнутым контуром, относящейся к управлению с обратной связью как времени нечувствительности плюс колебательная система второго порядка (запаздывание второго порядка), является управляемым объектом. Примером таких систем является система, которая определяет величину действия исполнительного устройства (регулируемого сопла, дроссельной заслонки и EGR-клапана турбины переменной производительности) посредством управления с обратной связью, так что фактическое значение количественного параметра состояния двигателя (давление наддува, эффективность наполнения и доля EGR) становится ближе к целевому значению. Предполагается, что верхнее предельное значение накладывается на величину изменения в количественном параметре состояния в единицу времени. Этот пример модификации может также быть аналогично применен относительно второго варианта осуществления (описан позже).
[0044] Далее в данном документе второй вариант осуществления изобретения будет описан со ссылкой на фиг. 10-13. Последующее описание второго варианта осуществления предполагает, как и в описании первого варианта осуществления, что система нейтрализации отработавшего газа для дизельного двигателя является управляемым объектом, и ECU 30 имеет структуру контроля за соблюдением целевого значения, аналогичную системе первого варианта осуществления. Соответственно, последующее описание будет фокусироваться на том, как второй вариант осуществления отличается от первого варианта осуществления.
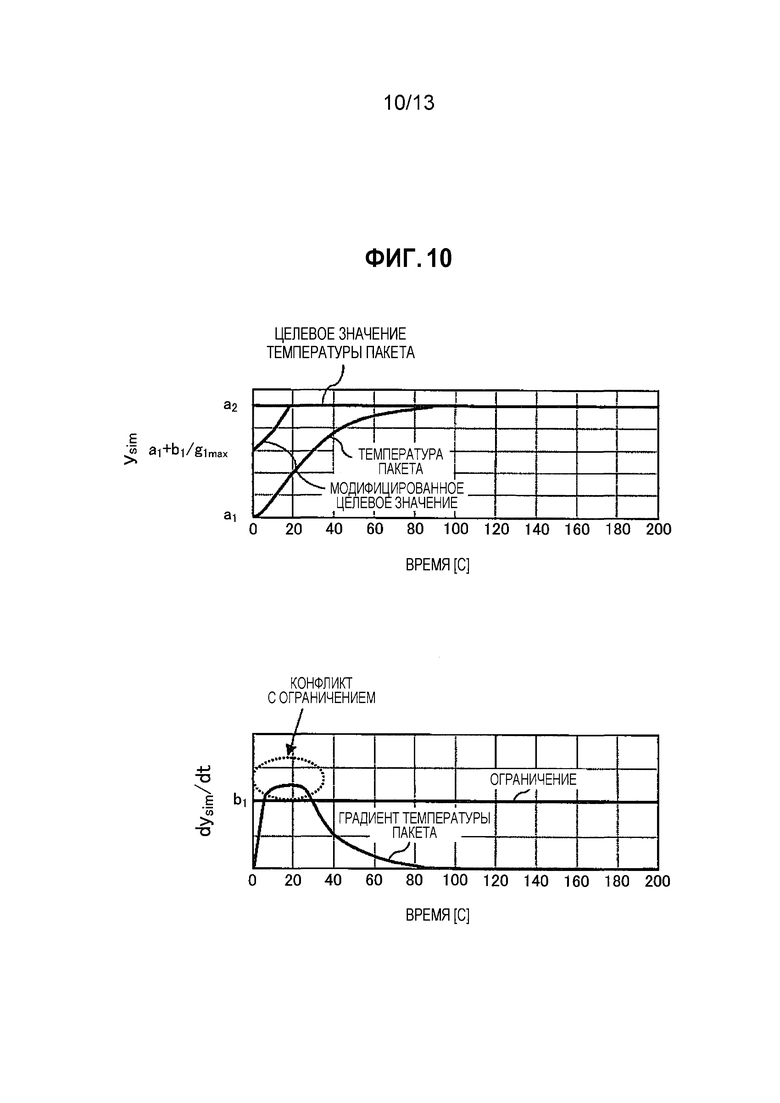
[0045] Фиг. 10 - это график для показа проблемы первого варианта осуществления. В численном моделировании, которое иллюстрируется на фиг. 7, целевое значение Tdpfref температуры пакета DPF предполагает быть постоянным в течение периода моделирования. Однако, целевое значение Tdpfref должно расти от момента к моменту в течение фактического управления нагревом для DPF 16 в результате роста температуры пакета DPF. Фиг. 10 показывает результат численного моделирования, выполненного с учетом этого момента. В численном моделировании, иллюстрированном на фиг. 10, Tdpf+β/g1max (=a1+b1/g1max) вводится в качестве целевого значения Tdpfref температуры пакета DPF во время 0, и затем это целевое значение Tdpfref модифицируется каждые 8 мс.
[0046] Как иллюстрировано на фиг. 10, прогнозируемое значение градиента температуры пакета превышает верхнее предельное значение β и конфликтует с ограничением приблизительно на 25% в случае, когда целевое значение Tdpfref температуры пакета DPF модифицируется в течение периода моделирования. Уравнение (20), относящееся к временному градиенту, получается, когда реакция на импульсное возмущение получается посредством применения формулы обратного преобразования Лапласа к уравнению (19), которое представляет выходные данные, которые получаются в результате ввода β/g1max в модель, иллюстрированную на фиг. 3, с тем, чтобы получать максимальное значение величины конфликта (максимальную величину конфликта).
[0047] Уравнение (21) получается, когда обе стороны уравнения (20) дифференцируются по времени, так что получается максимальная величина конфликта. Однако, значение с правой стороны уравнения (21) всегда положительное, и, таким образом, максимальная величина конфликта не может быть получена.
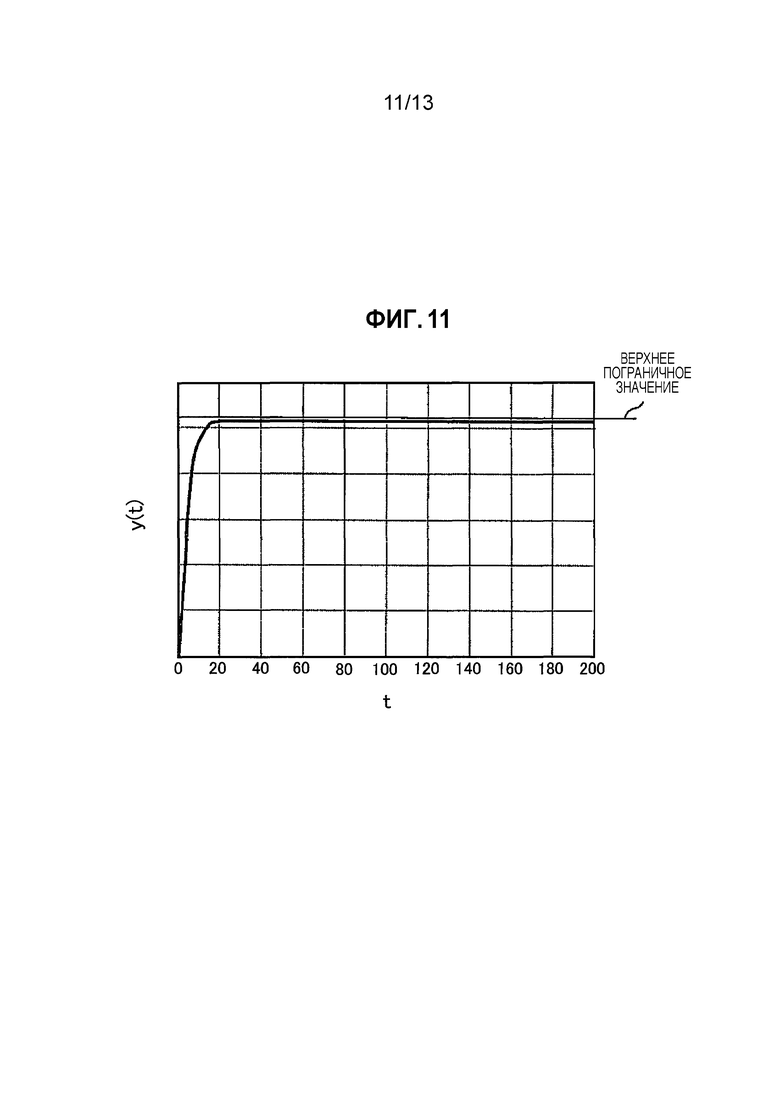
[0048] Изобретатель настоящей заявки уделил дополнительное внимание проблеме и обнаружил, что верхнее пограничное значение градиента нагрева может быть получено, хотя максимальное значение величины конфликта не может быть получена. Фиг. 11 - это график, иллюстрирующий результат построения графика уравнения (20). Когда получается предельное значение уравнение (20), уравнение (22), показывающее верхнее пограничное значение градиента нагрева, получается на основе этого результата.
[0049] Уравнение (22) означает, что верхнее пограничное значение градиента температуры пакета во время управления нагревом для DPF 16 равно ωn/2ζg1max, умноженное на верхнее предельное значение β. Соответственно, ограничение, относящееся к градиенту температуры пакета при фактической реакции, удовлетворяется, когда целевое значение Tdpfref температуры пакета DPF модифицируется на основе уравнения (23), в котором β/g1max уравнения (18) делится на ωn/2ζg1max, в модификации целевого значения температуры пакета DPF.
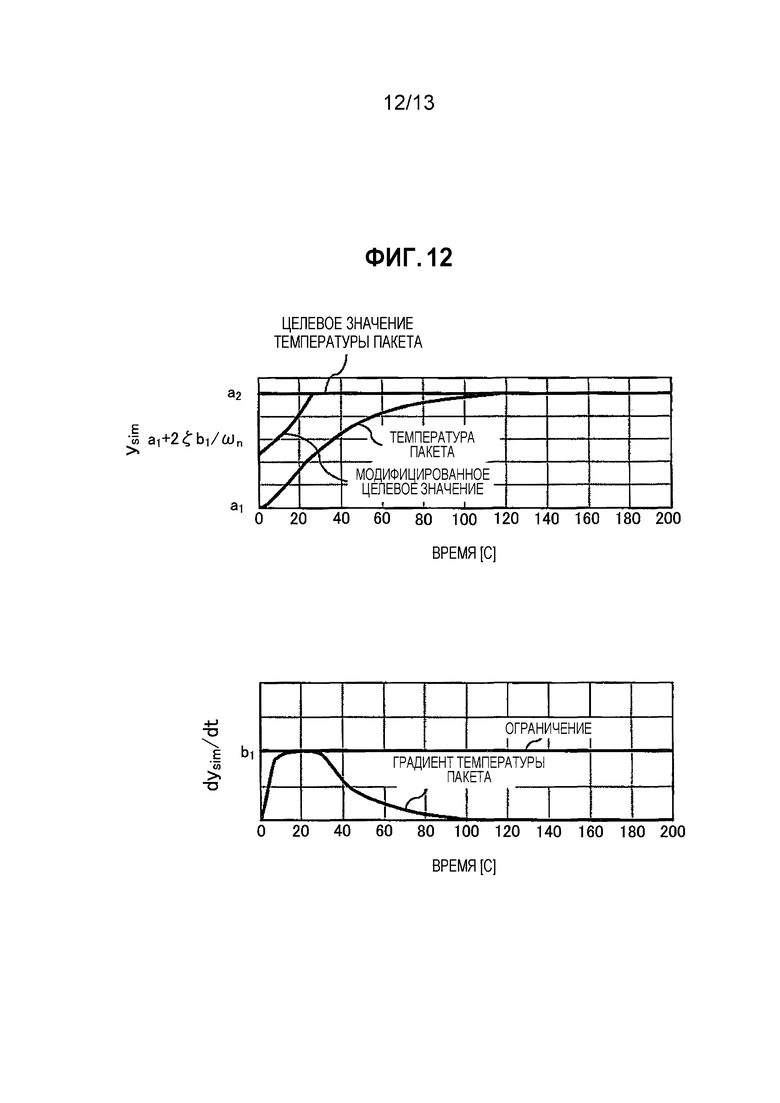
[0050] Результаты модификации целевого значения на основе уравнения (23) будут описаны со ссылкой на фиг. 12. Фиг. 12 - это график, иллюстрирующий результат численного моделирования, свойственного случаю, когда первоначальное целевое значение модифицируется на основе уравнения (23). В численном моделировании на фиг. 12 Tdpf+2ζβ/ωn (= a1+2ζb1/ωn) вводится в качестве целевого значения Tdpfref температуры пакета DPF во время 0, и затем это целевое значение Tdpfref модифицируется каждые 8 мс, как в численном моделировании на фиг. 10.
[0051] В случае, когда a1+2ζb1/ωn вводится в качестве целевого значения Tdpfref температуры пакета DPF во время 0, как иллюстрировано на фиг. 12, прогнозируемое значение градиента температуры пакета равно или меньше верхнего предельного значения β, и ограничение удовлетворяется. Это означает, другими словами, что ограничение, относящееся к градиенту температуры пакета при фактической реакции, удовлетворяется в модификации целевого значения на основе уровня (23).
[0052] Фиг. 13 - это схема, иллюстрирующая алгоритм эталонного регулятора согласно второму варианту осуществления. Во втором варианте осуществления, меньшее из первоначального целевого значения Tdpfref,org температуры пакета DPF и модифицированного целевого значения Tdpfref,mod температуры пакета DPF определяется в качестве конечного целевого значения r=Tdpfref во время управления нагревом для DPF 16, как иллюстрировано на фиг. 13. Модифицированное целевое значение Tdpfref,mod вычисляется как значение, которое получается посредством сложения 2ζβ/ωn с текущей температурой Tdpf пакета DPF (уравнение (23)).
[0053] Согласно второму варианту осуществления целевое значение температуры пакета DPF может быть модифицировано, в то время как ограничение, относящееся к градиенту температуры пакета при фактической реакции, удовлетворяется, на основе вычисления в режиме реального времени с помощью уравнения (23), которое описано выше. С этой модификацией целевого значения на основе уравнения (23) прогнозирование будущего целевого значения и поиск оптимального значения для целевой функции, описанный со ссылкой на фиг. 5, не должны выполняться, и, таким образом, вычислительная нагрузка, накладываемая на ECU 30, может быть уменьшена.
Изобретение относится к устройству управления и способу управления для двигателя внутреннего сгорания. Техническим результатом является то, что вычислительная нагрузка, применяемая к устройству управления, которое выполняет вычисление в режиме реального времени с помощью прогностической модели, уменьшается, и модификация целевого значения может быть выполнена точно. Результат достигается тем, что устройство управления включает в себя контроллер обратной связи, который определяет величину действия исполнительного устройства посредством управления с обратной связью, так что фактическое значение количественного параметра состояния становится ближе к целевому значению, и эталонный регулятор, который модифицирует целевое значение, так что величина изменения в количественном параметре состояния в единицу времени равна или меньше верхнего предельного значения β. Эталонный регулятор вычисляет модифицированное целевое значение посредством сложения 

с текущим значением количественного параметра состояния (ζ, ωn: коэффициент затухания, собственная частота угловых колебаний формулы модели в случае, когда динамическая характеристика системы с замкнутым контуром моделируется как время нечувствительности плюс колебательная система второго порядка,
T1, 
и определяет меньшее из модифицированного целевого значения и первоначального целевого значения в качестве конечного целевого значения количественного параметра состояния. 2 н. и 2 з.п. ф-лы, 13 ил.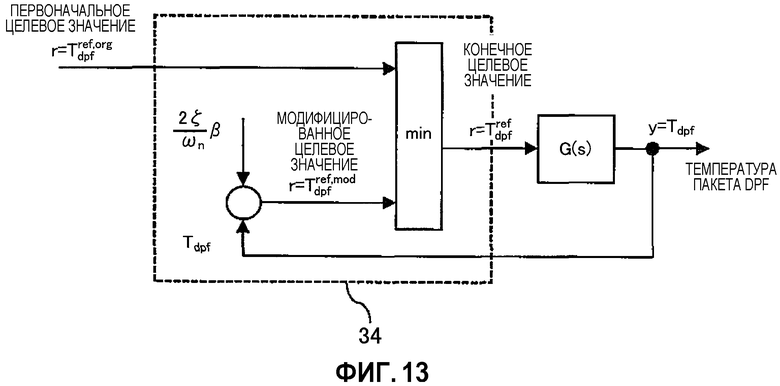
1. Устройство управления для двигателя внутреннего сгорания, причем устройство управления выполнено с возможностью управлять конкретным количественным параметром состояния двигателя внутреннего сгорания посредством действия исполнительного устройства, при этом упомянутое устройство управления содержит:
контроллер обратной связи, выполненный с возможностью определять величину действия исполнительного устройства посредством управления с обратной связью, так что фактическое значение количественного параметра состояния становится ближе к целевому значению; и
эталонный регулятор, выполненный с возможностью модифицировать целевое значение количественного параметра состояния, так что ограничение, наложенное на количественный параметр состояния, удовлетворяется,
при этом ограничение удовлетворяется, когда величина изменения в количественном параметре состояния в единицу времени равна или меньше верхнего предельного значения β, и
при этом эталонный регулятор выполняется с возможностью вычислять модифицированное целевое значение как значение, полученное посредством сложения одного из 

2. Устройство управления по п. 1,
при этом количественный параметр состояния является температурой пакета дизельного сажевого фильтра, расположенного в выхлопном канале дизельного двигателя, и
при этом исполнительное устройство является устройством, добавляющим топливо выше по потоку от дизельного сажевого фильтра в выхлопном канале.
3. Способ управления для двигателя внутреннего сгорания, в котором конкретный количественный параметр состояния двигателя внутреннего сгорания управляется посредством действия исполнительного устройства, при этом способ управления содержит этапы, на которых
определяют величину действия исполнительного устройства посредством управления с обратной связью, так что фактическое значение количественного параметра состояния становится ближе к целевому значению; и
модифицируют целевое значение количественного параметра состояния, так что ограничение, наложенное на количественный параметр состояния, удовлетворяется,
при этом ограничение удовлетворяется, когда величина изменения в количественном параметре состояния в единицу времени равна или меньше верхнего предельного значения β, и
при этом модификация целевого значения количественного параметра состояния включает в себя этапы, на которых
вычисляют модифицированное целевое значение как значение, полученное посредством сложения одного из 

определяют меньшее из модифицированного целевого значения и первоначального целевого значения в качестве конечного целевого значения количественного параметра состояния.
4. Способ управления по п. 3,
при этом количественный параметр состояния является температурой пакета дизельного сажевого фильтра, расположенного в выхлопном канале дизельного двигателя, и
при этом исполнительное устройство является устройством, добавляющим топливо выше по потоку от дизельного сажевого фильтра в выхлопном канале.
| JP 2013084091 A, 2013.05.09 | |||
| US 2009320798 A1, 2009.12.31 | |||
| JP 2013228859 A, 2013.11.07 | |||
| JP 2014127083 A, 2014.07.07 | |||
| US 5021959 A, 1991.06.04 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ВПРЫСКА ДВС | 2012 |
|
RU2519272C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВС | 1999 |
|
RU2170359C2 |

