Изобретение относится к автоматике и может быть использовано для автоматического регулирования частоты вращения ротора синхронного генератора.
Определение оптимальных настроек систем автоматического регулирования (САР) требует решения таких задач, как идентификация динамического объекта и расчет взаимосвязанных параметров настройки, обеспечивающих заданный критерий оптимальности. Однако, полученная настройка САР с типовыми линейными законами управления (ПИ, ПИД и т.п.), широко используемыми на практике, может оказаться неоптимальной в результате изменения режима работы объекта.
Поэтому необходимо определять оптимальные настройки САР для всех возможных режимов работы динамического объекта, по это связано с трудоемкими расчетами большого количества взаимосвязанных параметров.
Использование алгоритма прогнозирования в составе типовых регуляторов позволяет осуществить настройку САР с помощью одного параметра - времени прогноза. Для этого необходимо перейти от регулирования по текущему значению ошибки ε(t) к управлению, предполагающему вычисление значения прогноза ε(t+τƒor), на основании которого реализуется упреждающее воздействие.
В частности, известен прогностический регулятор [1], который осуществляет управление объектом на основе линейного прогноза и который реализуют по двум значениям регулируемой величины: текущему y(t) и предыдущему y(t-Δt), когда передаточная функция линейного прогнозирующего звена определяется выражением
где Tp - постоянная времени прогнозирующего звена;
s - оператор Лапласа.
Прогностические алгоритмы могут быть реализованы па базе программируемой микропроцессорной техники и использованы в автоматическом регуляторе частоты вращения (АРЧВ) синхронного генератора.
Недостатком известного способа является относительно низкая точность регулирования.
Кроме того, известен способ [RU 2591870, C1, E21B 43/12, 20.07.2016], в котором анализируют полученные данные и подают команды на автоматический регулирующий клапан расхода газа, оптимизируя суммарный дебит скважины в соответствии с определенной зависимостью с учетом фильтрационных сопротивлений скважины, причем, управление режимами работы газодобывающей скважины формируют на основе адаптивного импульсного регулятора, воздействующего на временной квантователь, в котором происходит фиксация величины управляющего сигнала uимi(t) в течение заданного периода (кванта) времени с последующим воздействием на исполнительный механизм, управляющим регулирующим клапаном, меняющим количество газа, поступающего в коллектор, следя за квантованным сигналом uκB, при этом адаптивный регулятор имеет закон регулирования

где kИ, kД - коэффициенты соответственно интегральной и пропорциональной составляющих ПИД закона регулирования, kП(t) - общий коэффициент передачи, который изменяется в соответствии с уравнениями kП(t)=kн+γy(t),

где время фильтрации Та рассчитывается в условных единицах, а kп>0 и γ>0 - настраиваемые параметры адаптивного регулятора.
Недостатком этого технического решения является относительно узкая область применения.
Наиболее близким по технической сущности к предложенному является способ регулирования [RU 2658287, C1, F02D 41/02, 26.06.2018], в котором конкретный количественный параметр состояния объекта управления регулируется посредством действия исполнительного устройства, а способ содержит этапы, на которых определяют величину действия исполнительного устройства посредством управления с обратной связью так, что фактическое значение количественного параметра состояния становится ближе к целевому значению, и модифицируют целевое значение количественного параметра состояния так, что ограничение, наложенное на количественный параметр состояния, удовлетворяется, при этом, ограничение удовлетворяется, когда величина изменения в количественном параметре состояния в единицу времени равна или меньше верхнего предельного значения β, и, при этом, модификация целевого значения количественного параметра состояния включает в себя этапы, на которых вычисляют модифицированное целевое значение как значение, полученное посредством сложения одного из  и
и  с текущим значением количественного параметра состояния, когда коэффициент ζ затухания и собственная частота ωn угловых колебаний, соответственно, указывают коэффициент затухания и собственную частоту угловых колебаний формулы модели в случае, когда динамическая характеристика системы с замкнутым контуром моделируется как время нечувствительности плюс колебательная система второго порядка, и T1 и Т2 выражаются как
с текущим значением количественного параметра состояния, когда коэффициент ζ затухания и собственная частота ωn угловых колебаний, соответственно, указывают коэффициент затухания и собственную частоту угловых колебаний формулы модели в случае, когда динамическая характеристика системы с замкнутым контуром моделируется как время нечувствительности плюс колебательная система второго порядка, и T1 и Т2 выражаются как  и определяют меньшее из модифицированного целевого значения и первоначального целевого значения в качестве конечного целевого значения количественного параметра состояния.
и определяют меньшее из модифицированного целевого значения и первоначального целевого значения в качестве конечного целевого значения количественного параметра состояния.
Недостатком этого технического решения является относительно узкая область применения и относительно низкая точность регулирования.
Поставленная задача относительно способа автоматического регулирования частоты вращения ротора синхронного генератора заключается в разработке способа автоматического регулирования частоты вращения ротора синхронного генератора с использованием прогностического алгоритма, обеспечивающего более эффективную реакцию регулятора на изменение нагрузки и улучающего показатели качества регулирования в переходных процессах (уменьшение перерегулирования, уменьшение времени переходного процесса, снижение колебательности) при сохранении требуемых запасов устойчивости без применения способов, изменяющих структуру регулятора и требующих значительных вычислительных ресурсов и обеспечивающего более высокую точность регулирования частоты вращения ротора синхронного генератора.
Требуемый технический результат относительно способа заключается в расширении области применения и повышении точности регулирования.
Поставленная задача решается, а требуемый технический результат достигается тем, что в способе регулирования частоты вращения ротора синхронного генератора с использованием пропорционально-интегрально-дифференциального алгоритма (ПИД) регулирования, согласно изобретению, постоянную времени прогнозирующего элемента определяют, как период собственных колебаний ротора генератора из соотношения
где ƒр - частота собственных колебаний ротора генератора в Гц; ω0 - номинальная угловая частота вращения ротора генератора в рад/с; Tje - эквивалентная постоянная механической инерции агрегата, с; Ps - синхронизирующая мощность, о.е.
Кроме того, известны конструкции регуляторов.
В составе преобразовательно-усилительного элемента таких регуляторов обычно используются гидравлические двигатели (сервомоторы). В качестве остальных элементов, формируемых закон регулирования, могут применяться механические, гидравлические и электрические устройства.
В зависимости от состава технических средств АРЧВ принято разделять на три вида: гидромеханические, гидродинамические и электрогидравлические [2].
В гидромеханических регуляторах функции измерения необходимых параметров и формирования стабилизирующих устройств осуществляют механические устройства, а в электрогидравлических - электротехнические. Гидромеханические регуляторы мало пригодны для реализации некоторых управляющих воздействий, а также для группового регулирования, имеющего большое значение для многоагрегатных станций. В связи с этим в последние годы выпускают в основном электрогидравлические регуляторы (ЭГР).
ЭГР состоит из двух частей [2]: электрического регулятора и гидравлической исполнительной части, связанной с регулятором электрогидравлическим преобразователем (ЭГП) его выходного тока в механическое воздействие на турбину.
Электрогидравлический преобразователь ЭГП представляет собой магнитоэлектрическое устройство преобразования значения и знака тока регулятора в поступательное перемещение штока золотника гидравлического двигателя направляющего аппарата турбины. Он состоит из собственно электромеханического преобразователя тока в перемещение якоря электромагнита и гидравлического усилителя в виде следящего золотника (СЗ), аналогичного СЗ измерительного преобразователя частоты вращения гидродинамического АРЧВ тепловой турбины.
Автоматический регулятор типа ЭГР-МП является микропроцессорной частью электрогидравлической автоматической системы регулирования частоты и активной мощности, воздействующей на ЭГП [2]. Он выполнен на двух взаимно резервируемых микропроцессорах, которые функционируют по принципу «ведущий-ведомый».
Микропроцессор формирует в общем случае пропорционально-интегрально-дифференциальный алгоритм (ПИД-алгоритм) регулирования. Таким образом, для реализации прогностического алгоритма достаточно добавить линейное прогнозирующее звено последовательно ПИД регулятору, что можно реализовать на том же микропроцессоре.
Известны цифровые регуляторы.
В частности, известен автоматический регулятор [RU 74492, U1, G05B 11/00, 27.06.2008], содержащий электронный регулирующий блок с релейным выходом, который охваченный первым RC-контуром гибкой обратной связи для формирования основного закона регулирования, а также вторым инерционным RC-контуром гибкой обратной связи, содержащим нелинейный фильтр из полупроводниковых элементов (диодов и стабилитронов), включенных встречно-параллельно резистору инерционного RC-контура, сигнал которого подается на вход регулятора с запаздыванием относительно первой быстродействующей обратной связи.
Недостатком этого технического решения является относительно низкая точность регулирования.
Наиболее близким по технической сущности к предложенному является цифровой регулятор, реализующий типовой ПИД - закон регулирования в широком диапазоне изменения параметров настройки и используемый в системах с исполнительными механизмами постоянной скорости [RU 42114, U1, G05B 11/28, 20.11.2004], содержащий аналого-цифровой преобразователь, вход которого является первым входом устройства, а его выход связан с последовательно соединенными первым блоком масштабирования и фильтром, при этом, фильтр связан с первым сумматором, вход которого является вторым входом устройства, первый сумматор соединен с блоком зоны нечувствительности, который подсоединен к дифференциатору и двукратному дифференциатору, второй сумматор связан с последовательно соединенными первым блоком ограничения амплитуды и вторым блоком масштабирования, а выходы блока импульсного выхода являются выходами устройства, причем, регулятор дополнительно снабжен фильтрующим усилителем, блоком блокировки приращения пропорциональной составляющей, блоком ограничения приращения дифференциальной составляющей, блоком коррекции малых длительностей импульсов и блоком коррекции больших длительностей импульсов, причем фильтрующий усилитель соединен с блоком зоны нечувствительности, а блок блокировки приращения пропорциональной составляющей соединен с дифференциатором и блоком зоны нечувствительности, блок ограничения приращения дифференциальной составляющей подключен к двукратному дифференциатору, дифференциатору и фильтрующему усилителю, второй сумматор подсоединен к блоку блокировки приращения пропорциональной составляющей, фильтрующему усилителю и блоку ограничителя приращения дифференциальной составляющей, при этом блок коррекции малых длительностей импульсов состоит из первого блока вычисления модуля и управляемого переключателя, которые соответственно подключены ко второму блоку масштабирования, а первый блок вычисления модуля соединен с блоком сравнения "меньше" и с первым блоком задержки, выход которого соединен с первым блоком сравнения "больше", а соответствующие входы блока сравнения "меньше" и первого блока сравнения "больше" являются третьим входом устройства, их выходы связаны с блоком логического И, который соединен с блоком логического ИЛИ, который связан с интегратором, при этом блок сравнения "меньше" соединен с первым управляемым переключателем, который подключен к интегратору, выход которого соединен с третьим сумматором, к другому входу которого подключен выход второго блока масштабирования, причем выход третьего сумматора связан со вторым блоком вычисления модуля, который подсоединен к блоку сравнения "больше либо равно", второй вход которого является третьим входом устройства, выход блока сравнения "больше либо равно" соединен со вторым управляемым переключателем и со вторым блоком задержки, который связан с блоком логического ИЛИ, кроме этого второй блок масштабирования подключен ко второму управляемому переключателю, который подключен к третьему сумматору, кроме того, блок коррекции больших длительностей импульсов содержит четвертый сумматор, который соединен со вторым управляемым переключателем и со вторым блоком ограничения амплитуды, второй блок ограничения амплитуды подключен к третьему блоку задержки, который соединен с блоком определения знака и с пятым сумматором, при этом блок определения знака подключен к умножителю, другой вход которого является четвертым входом устройства, а выход умножителя подсоединен к пятому сумматору, который связан с третьим управляемым переключателем и с третьим блоком вычисления модуля, который соединен со вторым блоком сравнения "больше", другой вход которого является четвертым входом устройства, а выход связан с третьим управляемым переключателем, который подключен к четвертому сумматору, а второй блок ограничения амплитуды соединен с блоком импульсного выхода.
Недостатком наиболее близкого технического решения является относительно низкая точность регулирования.
Поставленная задача относительно регулятора, реализующего типовой ПИД - закон регулирования в широком диапазоне изменения параметров настройки и используемый в системах с исполнительными механизмами постоянной скорости, заключается в разработке устройства автоматического регулирования частоты вращения ротора синхронного генератора с использованием прогностического алгоритма, обеспечивающего более эффективную реакцию регулятора на изменение нагрузки и улучающего показатели качества регулирования в переходных процессах (уменьшение перерегулирования, уменьшение времени переходного процесса, снижение колебательности) при сохранении требуемых запасов устойчивости и обеспечивающего более высокую точность регулирования частоты вращения ротора синхронного генератора.
Требуемый технический результат относительно регулятора заключается в повышении точности регулирования.
Поставленная задача решается, а требуемый технический результат достигается тем, что в регулятор частоты вращения ротора синхронного генератора, содержащего алгебраический сумматор, суммирующий вход которого является входом задания частоты вращения ротора синхронного генератора, а вычитающий вход соединен с выходом сигнала текущей частоты вращения ротора синхронного генератора, и регулирующий элемент с пропорционально-интегрально-дифференциальным (ПИД) алгоритмом регулирования, вход которого соединен с выходом алгебраического сумматора, согласно изобретению, введен прогнозирующий элемент, первый вход которого соединен с выходом регулирующего элемента с алгоритмом ПИД-регулирования, выход которого соединен с входом регулирования частоты вращения ротора синхронного генератора, а также последовательно соединенные блок вычисления частоты собственных колебаний ротора генератора, вход которого соединен с выходом сигнала угла нагрузки синхронного генератора, и блок вычисления постоянной времени прогнозирующего элемента, выход которого соединен со вторым входом прогнозирующего элемента для определения времени прогноза.
Па чертеже представлены:
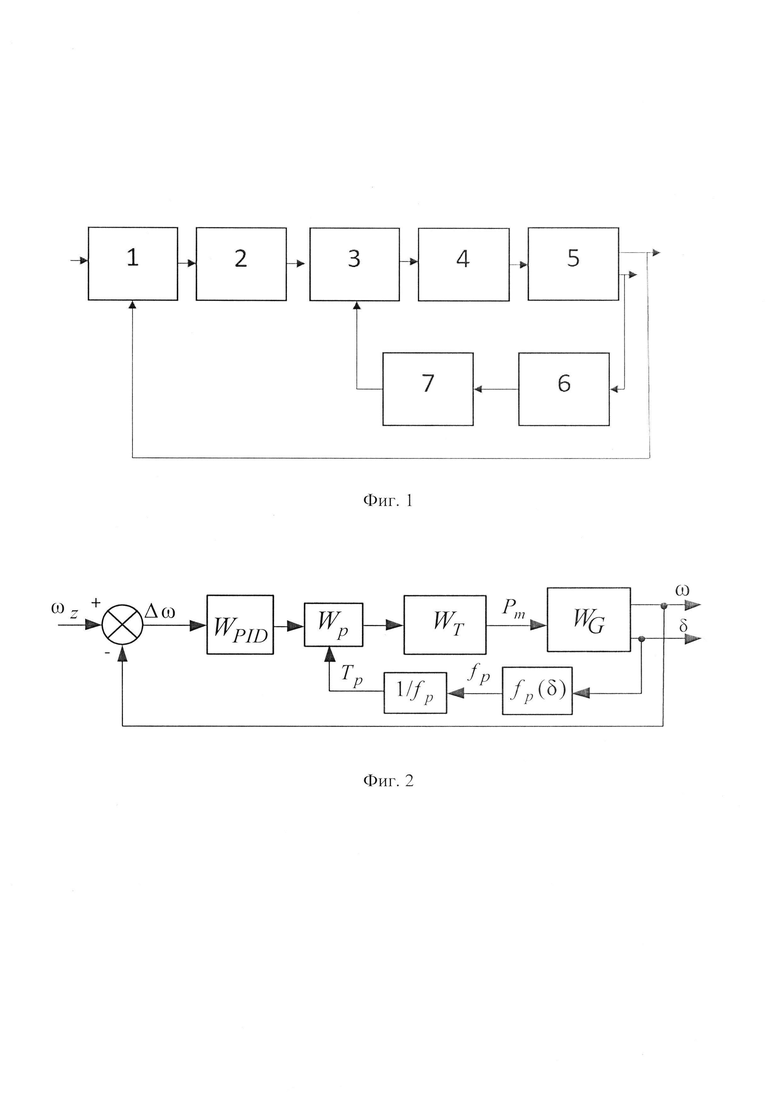
- на фиг.1 функциональная схема регулятора частоты вращения ротора синхронного генератора с элементами синхронного генератора;
- на фиг.2 - структурная схема модели регулятора частоты вращения ротора синхронного турбогенератора, где обозначены: ω - текущее значение частоты вращения, ωZ - заданное значение частоты вращения (уставка), Δω - отклонение текущего значения частоты вращения ротора генератора от заданного, δ - текущее значение угла нагрузки генератора, ƒp - частота собственных колебаний ротора генератора в Гц, Tp - постоянная времени прогнозирующего звена, WG - передаточная функция генератора, WT - передаточная функция турбины, WPID - передаточная функция ПИД-регулятора, WP - передаточная функция линейного прогнозирующего звена;
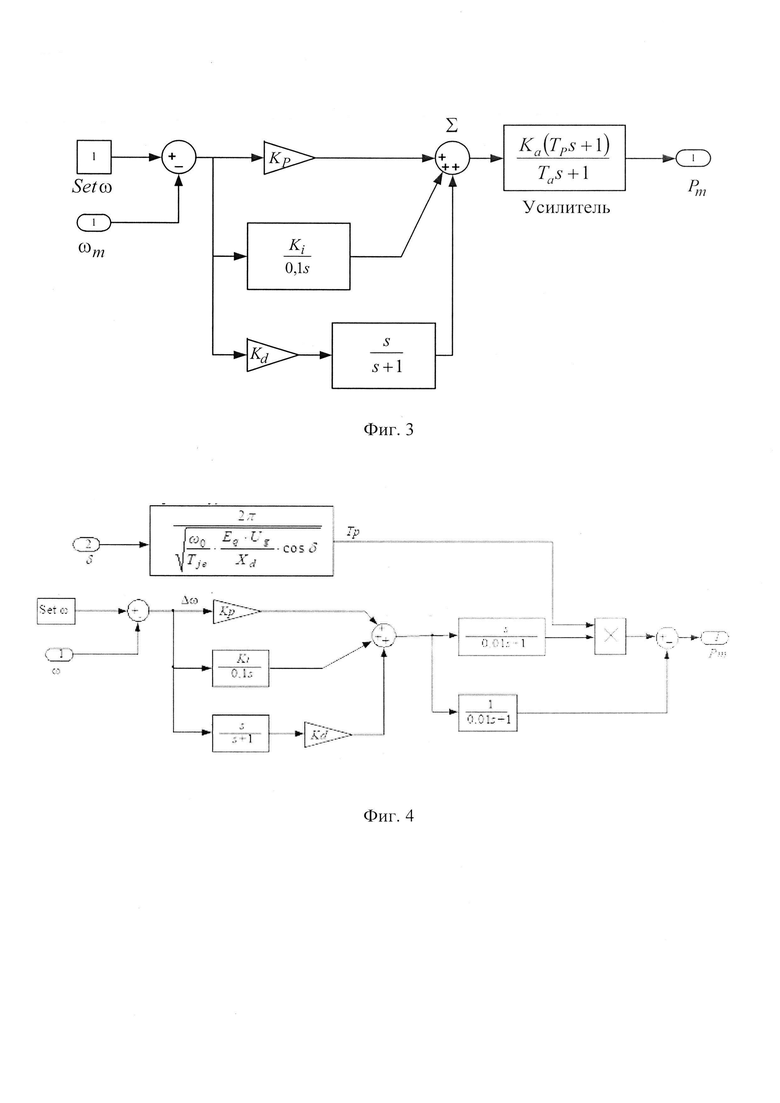
- на фиг.3 - Структурная схема прогностического АРЧВ: Kp, Ki, Kd - параметры настройки ПИД регулятора;
- на фиг.4 - Структурная схема самонастраивающегося прогностического АРЧВ;
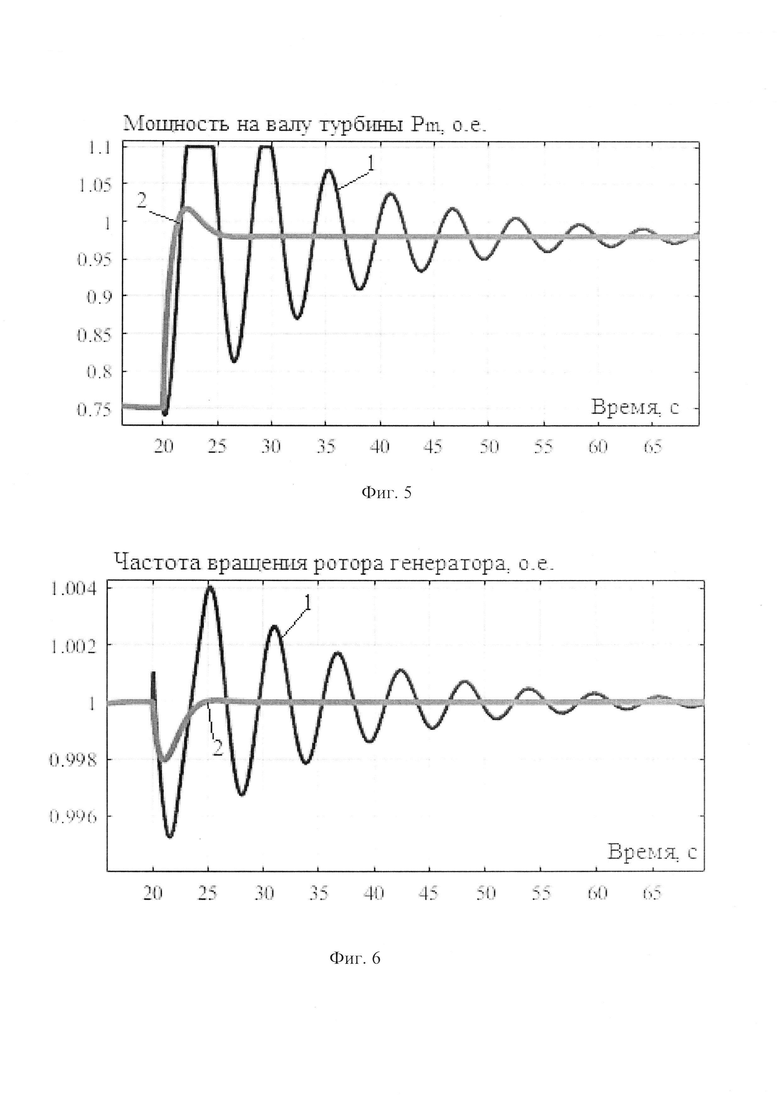
- на фиг.5 - графики изменений мощности турбогенератора при подключении дополнительной нагрузки: 1 - регуляторы без прогнозирующего звена, 2 - прогностический АРЧВ;
- на фиг.6 - графики изменений частоты вращения ротора турбогенератора при подключении дополнительной нагрузки: 1 - регуляторы без прогнозирующего звена, 2 - прогностический АРЧВ.
На фиг.1 обозначены:
1 - алгебраический сумматор;
2 - регулирующий элемент с пропорционалыю-интегралыю-дифференциальным (ПИД) алгоритмом регулирования;
3 - прогнозирующий элемент;
4 - турбина, находящаяся на одном валу с ротором синхронного генератора;
5 - синхронный генератор;
6 - блок вычисления частоты собственных колебаний ротора генера тора;
7 - блок вычисления постоянной времени прогнозирующего элемента.
Регулятор частоты вращения ротора синхронного генератора содержит алгебраический сумматор 1, суммирующий вход которого является входом задания частоты вращения ротора синхронного генератора, а вычитающий вход соединен с выходом сигнала текущей частоты вращения ротора синхронного генератора 5, и регулирующий элемент 2 с пропорционально-интегрально-дифференциальным (ПИД) алгоритмом регулирования, вход которого соединен с выходом алгебраического сумматора 1.
Кроме того, регулятор частоты вращения ротора синхронного генератора содержит прогнозирующий элемент 3, первый вход которого соединен с выходом регулирующего элемента 2 с алгоритмом ПИД-регулирования, выход которого соединен с входом регулирования частоты вращения ротора синхронного генератора 4, а также последовательно соединенные блок вычисления частоты собственных колебаний ротора генератора 6, вход которого соединен с выходом сигнала угла нагрузки синхронного генератора 5, и блок вычисления постоянной времени прогнозирующего элемента 7, выход которого соединен со вторым входом прогнозирующего элемента 3.
Проведем теоретическое обоснование предложенного способа и регулятора и опишем работу регулятора.
Структурная схема прогностического автоматического регулятора частоты (АРЧВ) представлена на фиг.3. В качестве входного сигнала АРЧВ используется отклонение частоты вращения ротора генератора ωm от заданной уставки Setω, поступающее на ПИД-регулятор, с выхода которого сигнал подается на блок «Усилитель» с передаточной функцией  и последовательно соединенного линейного прогнозирующего звена с передаточной функцией Tps+1. Числовые значения параметров усилителя могут быть следующими Ka=1; Ta=0,01 с. В результате формируется управляющее воздействие на изменение механической мощности турбины Pm.
и последовательно соединенного линейного прогнозирующего звена с передаточной функцией Tps+1. Числовые значения параметров усилителя могут быть следующими Ka=1; Ta=0,01 с. В результате формируется управляющее воздействие на изменение механической мощности турбины Pm.
Недостатком представленной системы является необходимость правильного определения времени прогноза Тр, что требует анализа динамических свойств регулируемой системы.
При возмущениях возможен различный характер колебаний напряжения и частоты у генератора, для устойчивой работы которого важно, чтобы эти колебания имели небольшую амплитуду и затухающий характер. Частота возникающих колебаний для синхронных машин зависит от синхронизирующих мощностей  определяющих устойчивость, и постоянных механической инерции агрегатов, от которых зависит быстрота протекания электромеханических процессов. Эта частота обычно называется собственной частотой колебаний и может быть определена из уравнения движения при малом изменении скорости вращения ротора и угла нагрузки генератора δΔ [3]:
определяющих устойчивость, и постоянных механической инерции агрегатов, от которых зависит быстрота протекания электромеханических процессов. Эта частота обычно называется собственной частотой колебаний и может быть определена из уравнения движения при малом изменении скорости вращения ротора и угла нагрузки генератора δΔ [3]:

где J⋅ωM - постоянная инерции; Ps - синхронизирующая мощность; δΔ - изменение угла нагрузки синхронного генератора.
Для получения уравнения (1) в относительных единицах необходимо его разделить на номинальную мощность машины Sb, затем после некоторых преобразований можно записать следующее соотношение [3]

Из уравнения (2) видно, что угловая частота колебаний синхронного генератора равна  Это и есть частота собственных колебаний ротора генератора ωp. Учитывая, что [3]
Это и есть частота собственных колебаний ротора генератора ωp. Учитывая, что [3]  можно записать следующее выражение для определения частоты собственных колебаний
можно записать следующее выражение для определения частоты собственных колебаний

где  - синхронизирующая мощность, о.е., где Eq - ЭДС генератора, о.е.; Ug - напряжение генератора, о.е.; Xd - индуктивное сопротивление генератора по продольной оси, о.е.; δ - угол нагрузки генератора (угол между ЭДС и напряжением генератора); ωм - угловая частота вращения ротора генератора, рад/с Tje - эквивалентная постоянная механической инерции агрегата, с.
- синхронизирующая мощность, о.е., где Eq - ЭДС генератора, о.е.; Ug - напряжение генератора, о.е.; Xd - индуктивное сопротивление генератора по продольной оси, о.е.; δ - угол нагрузки генератора (угол между ЭДС и напряжением генератора); ωм - угловая частота вращения ротора генератора, рад/с Tje - эквивалентная постоянная механической инерции агрегата, с.
Частота собственных колебаний ротора синхронного генератора согласно (2) задает характер изменения угла нагрузки δ, а синхронизирующая мощность влияет на амплитуду этих колебаний, что в целом определяет динамические свойства и устойчивость синхронной машины. В связи с этим постоянную времени прогнозирующего звена при использовании в АРЧВ можно определить для номинальных величин как период собственных колебаний ротора агрегата, зависящий от угла нагрузки генератора δ, по выражению

где ƒp - частота собственных колебаний ротора генератора в Гц; ω0 - номинальная угловая частота вращения ротора генератора в рад/с.
Частота собственных колебаний ротора генератора, а значит и постоянная времени прогнозирующего звена (4), существенно зависит от угла нагрузки δ. Принимая во внимание данное обстоятельство, целесообразно вычислять и изменять постоянную времени прогнозирующего звена АРЧВ при вариации режима работы. Структурная схема системы регулирования частоты вращения ротора генератора с предлагаемым самонастраивающимся прогностическим АРЧВ представлена на фиг.4. Отличительной особенностью предлагаемого АРЧВ от существующих аналогов является использование сигнала угла нагрузки генератора δ для формирования соответствующего алгоритма регулирования и стабилизации регулируемой величины. Необходимо отметить, что функция ƒp(δ), определяемая по выражению (4), зависит от параметров агрегата и для различных синхронных генераторов будет отличаться.
Угол нагрузки синхронной машины δ измеряется с помощью специального датчика, вычисляющего его значение по параметрам синхронной машины.
Предлагаемый способ автоматического регулирования частоты вращения ротора синхронного генератора может быть реализован в микроконтроллере с блоком, вычисляющим постоянную времени прогнозирующего звена. Таким образом, структурная схема регулятора, реализующего предлагаемый способ автоматического регулирования частоты вращения ротора синхронного генератора, представлена на фиг.4. Для расчета постоянной времени прогнозирующего звена необходимо задать номинальные параметры агрегата. Отдельный капал с прогнозирующим звеном представляет собой последовательное соединение электронного усилителя с передаточной функцией  и линейного прогнозирующего звена, что реализовано в схеме регулятора (фиг.4) в виде параллельного соединения блока
и линейного прогнозирующего звена, что реализовано в схеме регулятора (фиг.4) в виде параллельного соединения блока  умноженного па постоянную времени прогнозирующего звена Тр, и блока электронного усилителя. Параметры указанных блоков принимаются следующими: Ka=1; Та=0,01 с.
умноженного па постоянную времени прогнозирующего звена Тр, и блока электронного усилителя. Параметры указанных блоков принимаются следующими: Ka=1; Та=0,01 с.
В соответствии с представленной на фиг.4 структурной схемой регулятора, закон регулирования частоты вращения ротора и соответственно механической мощности турбины синхронного генератора имеет вид:

При этом постоянная времени прогнозирующего звена Тр изменяется в случае изменения нагрузочного режима синхронного генератора.
Исследование работы предлагаемого способа регулирования частоты вращения ротора синхронного генератора в сравнении с регулятором без прогнозирующего звена выполнялось на модели синхронного турбогенератора мощностью 3,125 MBА, работающего в изолированной системе электроснабжения с двигательной нагрузкой. Результаты моделирования показали (фиг.5 и фиг.6), что использование прогностического АРЧВ при подключении дополнительной динамической нагрузки позволяет улучшить показатели качества процесса регулирования: значительно снижается величина перерегулирования, уменьшается время переходного процесса и колебательность для мощности и частоты вращения ротора турбогенератора; уменьшается провал частоты вращения ротора генератора (фиг.5). Исследования работы предлагаемого регулятора в других режимах дают аналогичные результаты.
Литература
1. Пикина Г.А. Принцип управления по прогнозу и возможность настройки систем регулирования одним параметром // Новое в российской электроэнергетике. №3. 2014. С.5-13.
2. Овчаренко Н.И. Автоматика электрических станций и электроэнергетических систем. М.: Изд-во НЦ ЭНАС, 2001. 504 с.
3. Андерсон П., Фуад А. Управление энергосистемами и устойчивость. М: Энергия, 1980. 568 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПО ПИД-ЗАКОНУ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510956C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2013 |
|
RU2522258C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
Изобретение относится к электротехнике и может быть использовано для автоматического регулирования частоты вращения ротора синхронного генератора. Требуемый технический результат заключается в повышении точности регулирования. Технический результат достигается при использовании способа, заключающегося в том, что в регуляторе частоты вращения ротора синхронного генератора с пропорционально-интегрально-дифференциальным алгоритмом регулирования измеряется с помощью датчика угол нагрузки синхронной машины δ, сигнал от которого подается на микроконтроллер с блоком определения постоянной времени прогнозирующего элемента, сигнал от которого умножается на сигнал линейного прогнозирующего элемента, который последовательно соединяется с электронным усилителем. Постоянную времени прогнозирующего элемента устанавливают как период собственных колебаний ротора генератора из соотношения  где ƒp - частота собственных колебаний ротора генератора, Гц, ω0 - номинальная угловая частота вращения ротора генератора, рад/с, Tje - эквивалентная постоянная механической инерции агрегата, с,
где ƒp - частота собственных колебаний ротора генератора, Гц, ω0 - номинальная угловая частота вращения ротора генератора, рад/с, Tje - эквивалентная постоянная механической инерции агрегата, с,  - синхронизирующая мощность, о.е., где Eq - ЭДС генератора, о.е., Ug - напряжение генератора, о.е., Xd - индуктивное сопротивление генератора по продольной оси, о.е., δ - угол нагрузки генератора (угол между ЭДС и напряжением генератора). Регулятор для реализации способа содержит алгебраический сумматор, регулирующий элемент с ПИД-регулированием, прогнозирующий элемент, а также последовательно соединенные блок вычисления частоты собственных колебаний ротора генератора и блок вычисления постоянной времени прогнозирующего элемента. Вход блока вычисления частоты собственных колебаний ротора генератора соединен с выходом сигнала угла нагрузки синхронного генератора. Выход блока вычисления постоянной времени прогнозирующего элемента соединен со вторым входом прогнозирующего элемента. 2 н.п. ф-лы, 6 ил.
- синхронизирующая мощность, о.е., где Eq - ЭДС генератора, о.е., Ug - напряжение генератора, о.е., Xd - индуктивное сопротивление генератора по продольной оси, о.е., δ - угол нагрузки генератора (угол между ЭДС и напряжением генератора). Регулятор для реализации способа содержит алгебраический сумматор, регулирующий элемент с ПИД-регулированием, прогнозирующий элемент, а также последовательно соединенные блок вычисления частоты собственных колебаний ротора генератора и блок вычисления постоянной времени прогнозирующего элемента. Вход блока вычисления частоты собственных колебаний ротора генератора соединен с выходом сигнала угла нагрузки синхронного генератора. Выход блока вычисления постоянной времени прогнозирующего элемента соединен со вторым входом прогнозирующего элемента. 2 н.п. ф-лы, 6 ил.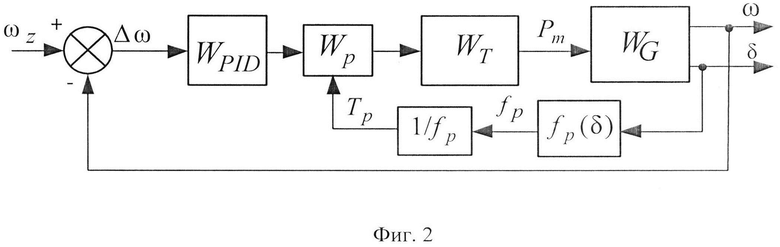
1. Способ автоматического регулирования частоты вращения ротора синхронного генератора, заключающийся в том, что для регулирования частоты вращения ротора синхронного генератора используют пропорционально-интегрально-дифференциальный (ПИД) алгоритм регулирования, отличающийся тем, что измеряется с помощью датчика угол нагрузки синхронной машины δ, сигнал от которого подается на микроконтроллер с блоком определения постоянной времени прогнозирующего элемента, сигнал от которого умножается на сигнал линейного прогнозирующего элемента, который последовательно соединяется с электронным усилителем, при этом постоянную времени прогнозирующего элемента определяют как период собственных колебаний ротора генератора из соотношения
 ,
,
где ƒp - частота собственных колебаний ротора генератора, Гц, ω0 - номинальная угловая частота вращения ротора генератора, рад/с; Tje - эквивалентная постоянная механической инерции агрегата, с;  - синхронизирующая мощность, о.е., где Eq - ЭДС генератора, о.е.; Ug - напряжение генератора, о.е.; Xd - индуктивное сопротивление генератора по продольной оси, о.е.; δ - угол нагрузки синхронной машины (угол между ЭДС и напряжением генератора).
- синхронизирующая мощность, о.е., где Eq - ЭДС генератора, о.е.; Ug - напряжение генератора, о.е.; Xd - индуктивное сопротивление генератора по продольной оси, о.е.; δ - угол нагрузки синхронной машины (угол между ЭДС и напряжением генератора).
2. Регулятор для реализации способа автоматического регулирования частоты вращения ротора синхронного генератора но п. 1, содержащий алгебраический сумматор, суммирующий вход которого является входом задания частоты вращения ротора синхронного генератора, а вычитающий вход соединен с выходом сигнала текущей частоты вращения ротора синхронного генератора, и регулирующий элемент с пропорционально-интегрально-дифференциальным (ПИД) алгоритмом регулирования, вход которого соединен с выходом алгебраического сумматора, отличающийся тем, что введен прогнозирующий элемент, первый вход которого соединен с выходом регулирующего элемента с алгоритмом ПИД-регулирования, выход которого соединен с входом регулирования частоты вращения ротора синхронного генератора, а также последовательно соединенные блок вычисления частоты собственных колебаний ротора генератора, вход которого соединен с выходом сигнала угла нагрузки синхронного генератора, и блок вычисления постоянной времени прогнозирующего элемента, выход которого соединен со вторым входом прогнозирующего элемента.
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2658287C1 |
| RU 42114 U1, 20.11.2004 | |||
| US 4587474 A, 06.05.1986 | |||
| Способ определения сбраживаемых углеводов в сладком заторе и зрелой бражке | 1948 |
|
SU74492A1 |
| DE 3149693 A1, 24.06.1982 | |||
| Частотно-регулируемый электропривод | 1983 |
|
SU1112522A1 |

