Изобретение относится к способу обработки сигнала, обеспечиваемого реверсивным датчиком, а также к устройству для реализации этого способа.
Область техники данного изобретения является, более конкретно, областью управления сигналами, обеспечиваемыми датчиками в двигателе транспортного средства, например, механического транспортного средства, для определения параметров двигателя с целью управления правильным функционированием последнего.
В двигателе внутреннего сгорания, обычно имеется по меньшей мере один подвижный поршень для изменения объема камеры сгорания. Впуск и выпуск текучих сред в камеры сгорания обычно выполняется с помощью тарельчатых клапанов, управляемых по меньшей мере одним распределительным валом. Энергия, выделяемая в камерах сгорания при сгорании топлива в окислителе, передается каждым поршнем к коленчатому валу.
Для управления двигателем внутреннего сгорания, важно знать «фазировку» (также называемую «синхронизацией») двигателя. Термин «фазировка» относится к точному определению такта цикла двигателя (для двигателя внутреннего сгорания четырехтактного типа они называются: впуск, сжатие, сгорание, выпуск), который обеспечивается в двигателе для каждого из его цилиндров. Точное положение в пределах такта цикла двигателя обычно устанавливается посредством определения положения коленчатого вала. Однако, для двигателя внутреннего сгорания четырехтактного типа, длительность цикла двигателя в камере сгорания соответствует двум полным оборотам коленчатого вала. Таким образом, для выяснения фазировки двигателя внутреннего сгорания этого типа, необходим дополнительный элемент информации. Кроме того, общепринято получение этого элемента информации на основе датчика положения распределительного вала. Действительно, распределительный вал имеет скорость вращения, соответствующую половине скорости вращения соответствующего коленчатого вала и, следовательно, перемещается только на один оборот в течение длительности полного цикла четырехтактного двигателя.
Общепринято, что датчик положения, соответствующий коленчатому валу, взаимодействует с мишенью, содержащей большое количество зубьев (обычно тридцать шесть или шестьдесят, без учета одного или двух отсутствующих зубьев, обеспечивающих возможность определения начала отсчета на мишени), в то время как мишень, используемая совместно с датчиком распределительного вала, имеет малое количество зубьев (например, четыре). Сигнал, обеспеченный датчиком, соответствующим коленчатому валу, используется затем для точного выяснения положения коленчатого вала (и, следовательно, поршней).
Однако, когда сигнал этого датчика является сигналом с дефектами или помехами, принимаются меры для использования сигнала, исходящего от датчика, соответствующего распределительному валу, в режиме с ухудшенными характеристиками.
Сигналы, обеспеченные датчиками, соответствующими коленчатому валу и по меньшей мере одному распределительному валу, вводятся в электронное устройство, такое как, например, типовой модуль таймера (generic timer module, GTM). В этом модуле обеспечивается цифровая система фазовой автоподстройки частоты (digital phase locked loop, DPLL) для управления синхронизацией положения двигателя и генерации углового синхронизирующего сигнала.
В то время как двигатель останавливается, коленчатый вал колеблется около положения равновесия, соответствующего положению остановки двигателя. Если затем необходимо быстро запустить двигатель после его остановки, важно точно выяснить положение остановки двигателя. Новые датчики положения, также называемые реверсивными датчиками, обеспечивают возможность, с одной стороны, подобно датчикам предшествующего уровня техники, обнаружения перепада, соответствующего зубу, а также, с другой стороны, определения направления вращения соответствующей мишени. Стратегия, интегрированная в цифровую систему фазовой автоподстройки частоты, обеспечивает возможность учета элемента информации, относящегося к направлению вращения мишени и, таким образом, выяснения положения двигателя, когда последний останавливается.
Реверсивный датчик известного типа, например, из документа JP 2005233622, обеспечивает сигналы, имеющие активный уровень и неактивный уровень. Длительность активного уровня зависит от направления вращения мишени. Например, удвоенная длительность активного уровня может быть выбрана для обратного вращения по отношению к длительности активного уровня для вращения в обычном направлении. Таким образом, возможно определение для каждого нового перепада соответствующего направления прохождения. Затем используется соответствующая стратегия в цифровой системе фазовой автоподстройки частоты для реализации углового синхронизирующего сигнала.
Однако, существуют реверсивные датчики, функционирующие согласно другому принципу. Направление вращения мишени обеспечивается в сигнале посредством изменения, например, напряжения, соответствующего активному уровню и/или неактивному уровню. Такой датчик известен также из документа JP 2005233622, фиг. 6, сигнал которого содержит четыре различных уровня.
Задачей данного изобретения является, тогда, обеспечение способа обработки сигнала, обеспечиваемого реверсивным датчиком, который дает возможность обеспечения углового синхронизирующего сигнала с использованием датчика, обеспечивающего индикацию направления вращения соответствующей мишени, например, посредством изменения напряжения активного уровня и/или неактивного уровня, в то время как используемая цифровая система фазовой автоподстройки частоты программируется для обнаружения различных длительностей активного уровня. Предпочтительно, способ согласно данному изобретению обеспечит возможность выполнения надежного определения углового положения, соответствующего двигателя. Кроме того, предпочтительно, чтобы модификации, подлежащие обеспечению на уровне соответствующего электронного устройства, были ограничены.
С этой целью, данное изобретение предлагает способ обработки сигнала обеспечиваемого реверсивным датчиком, обнаруживающим прохождение зубьев мишени, с целью генерации углового синхронизирующего сигнала двигателя внутреннего сгорания с помощью первого электронного компонента, принимающего сигнал, поступающий от реверсивного датчика, причем указанный первый компонент имеет средство для определения, в сигнале, имеющем низкоуровневые сегменты и высокоуровневые сегменты, является ли длительность сегмента данного уровня большей, чем заданный порог, или нет, и, причем, сигнал, обеспечиваемый реверсивным датчиком, является сигналом в форме интервалов времени (), содержащих по меньшей мере низкоуровневые сегменты, высокоуровневые сегменты, и сегменты промежуточного уровня, причем каждый интервал времени соответствует прохождению зуба мишени перед датчиком, и, причем, сигнал также содержит характеристики, обеспечивающие возможность определения направления прохождения зуба.
Согласно данному изобретению, такой способ обработки содержит следующие этапы:
генерация первого сигнала, использующего все интервалы времени сигнала, обеспечиваемого датчиком, но имеющего только сегменты, соответствующие первому уровню и сегменты, соответствующие второму уровню,
генерация второго сигнала, использующего интервалы времени сигнала, обеспечиваемого датчиком, и соответствующего первому направлению прохождения зуба перед датчиком, и имеющего постоянный уровень во время вращения мишени во втором направлении прохождения,
генерация третьего сигнала, использующего интервалы времени сигнала, обеспечиваемого датчиком, и соответствующего второму направлению прохождения зуба перед датчиком, и имеющего постоянный уровень во время вращения мишени в первом направлении прохождения,
подключение первого сигнала к входу первого электронного компонента,
подключение второго сигнала и третьего сигнала ко второму электронному компоненту,
обнаружение вторым электронным компонентом фронтов и/или срезов второго сигнала и третьего сигнала,
изменение значения заданного порога в первом компоненте, когда второй электронный компонент обнаруживает перепад на одном из двух сигналов, подключенных ко второму компоненту, в то время как предыдущий перепад обнаружен на другом сигнале, причем значение порога может принять либо первое заданное значение, выражающее максимальное значение, либо второе заданное значение, выражающее минимальное значение таким образом, что длительность интервалов времени всегда находится на одной и той же стороне от соответствующего порога (одна в одном направлении, а другая в другом направлении).
Основная концепция данного изобретения состоит, таким образом, с одной стороны, в адаптации сигнала для обеспечения его совместимости с компонентом и, с другой стороны, в изменении значения порога, используемого этим компонентом. Таким образом, компонент становится совместимым с несколькими реверсивными датчиками. Кроме того, адаптация одного датчика к другому, как выясняется из нижеследующего описания, данного со ссылкой на приложенные чертежи, может быть выполнена, в то же время ограничивая количество и стоимость аппаратных средств, необходимых для упомянутой адаптации.
В одном варианте осуществления способа согласно данному изобретению, третий сигнал получают, например, взятием разности между первым сигналом и вторым сигналом. Таким образом, средство, подлежащее реализации для получения этого третьего сигнала, является ограниченным.
Для облегчения реализации способа обработки согласно данному изобретению, обнаружение фронтов и/или срезов второго сигнала и третьего сигнала выполняется посредством выполнения обнаружения на одном сигнале, и, затем, как только нужный перепад обнаружен, обнаружение выполняется исключительно на другом сигнале, пока нужный перепад не будет на нем обнаружен. Таким образом, является ненужным постоянное отслеживание двух сигналов.
Данное изобретение также относится к электронному устройству, имеющему средство для реализации каждого из этапов способа обработки, такого как способ, описанный выше.
В одном варианте осуществления электронного устройства, такого как это, могут быть предусмотрены типовой модуль таймера, внутрь которого встроены первый компонент и второй компонент, а также по меньшей мере один третий компонент за пределами типового модуля таймера, для генерации второго сигнала и третьего сигнала.
В электронном устройстве согласно данному изобретению, первый компонент является, например, системой фазовой автоподстройки частоты, главным образом, цифровой системой фазовой автоподстройки частоты (DPLL).
Наконец, данное изобретение также относится к системе управления двигателя внутреннего сгорания, примечательной тем, что она содержит электронное устройство, такое как устройство, описанное выше, а также по меньшей мере один реверсивный датчик.
Подробности и преимущества данного изобретения проявятся лучше из нижеследующего описания, данного со ссылкой на приложенные схематичные чертежи, в которых:
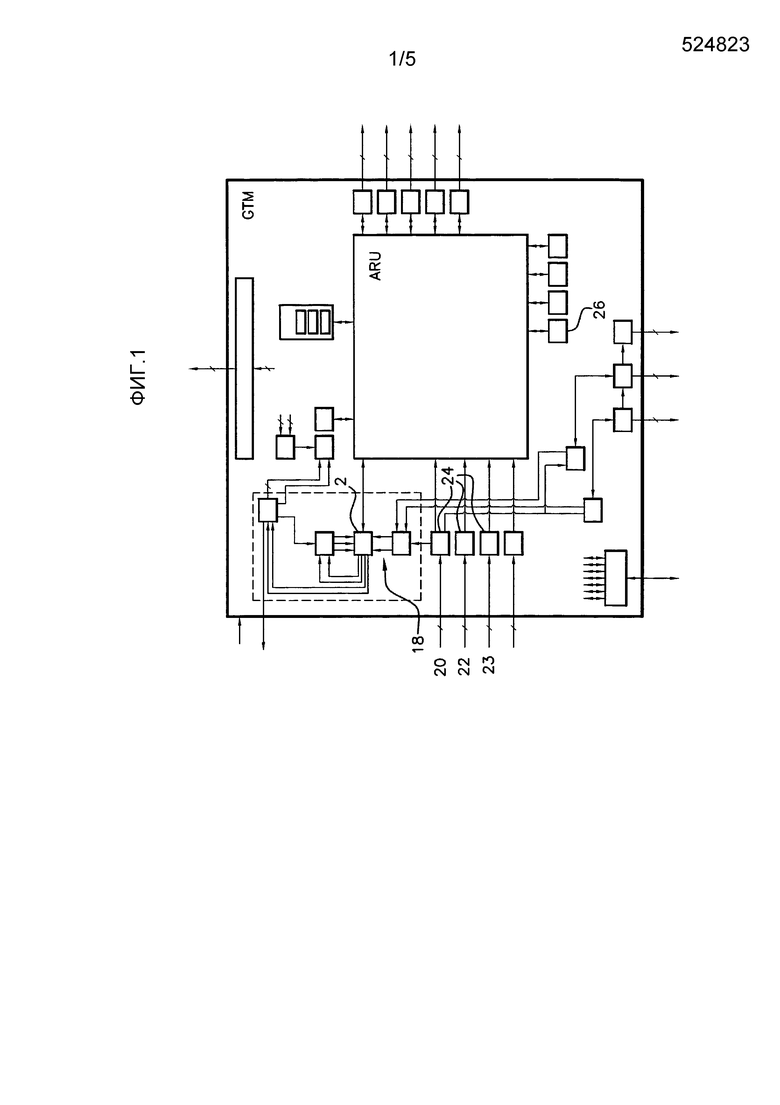
- Фиг. 1 иллюстрирует типовой модуль таймера, который может быть использован для реализации данного изобретения,
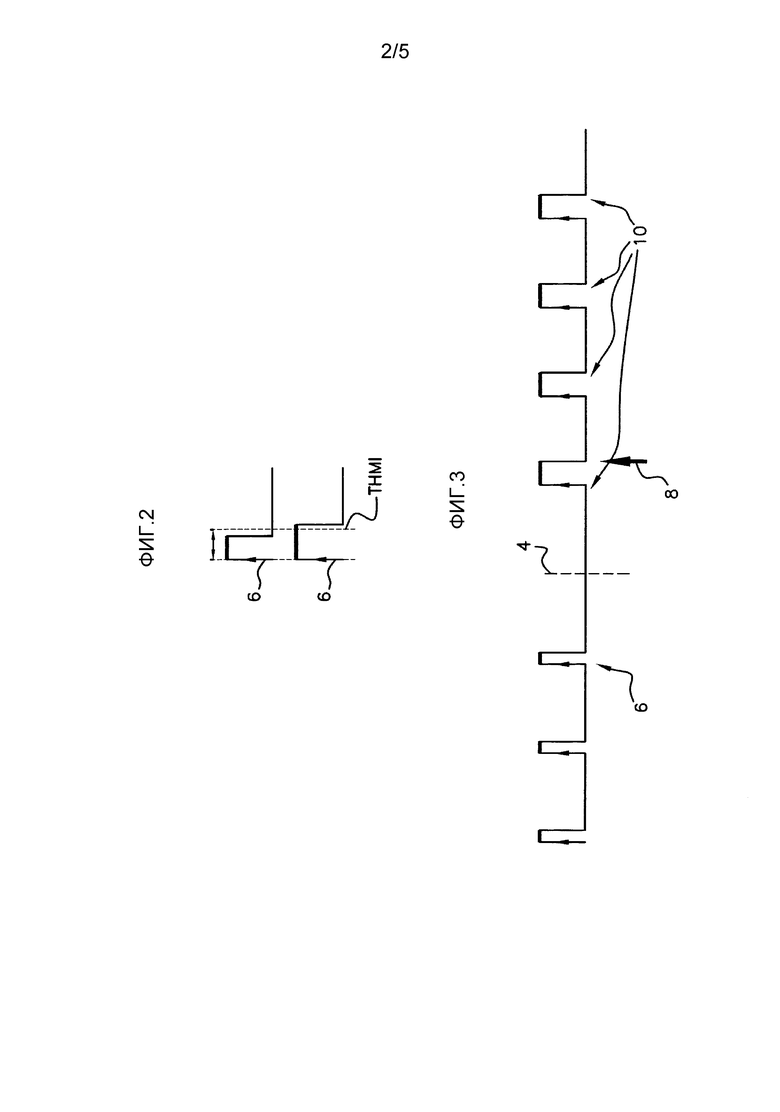
- Фиг. 2 иллюстрирует значение порога, используемое в компоненте модуля фиг. 1,
- Фиг. 3 иллюстрирует обнаружение направления вращения предшествующего уровня техники,
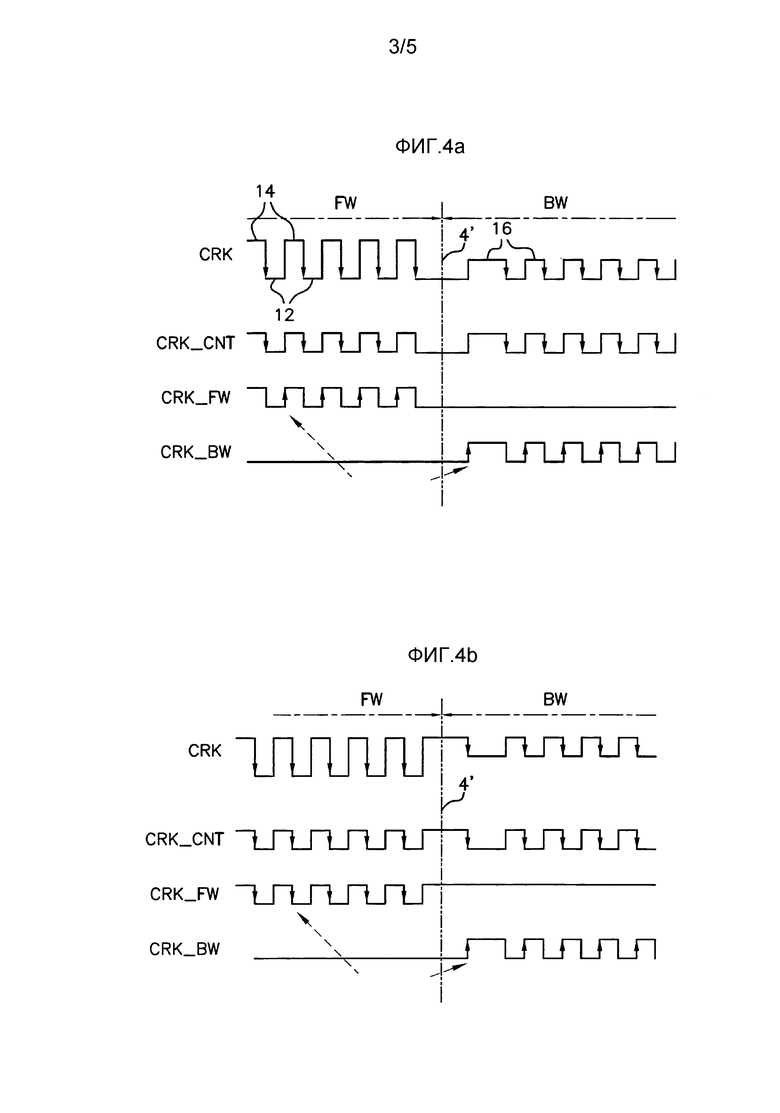
- Фиг. 4a иллюстрирует первый сигнал, обеспечиваемый реверсивным датчиком и три сигнала, полученные на основе этого первого сигнала,
- Фиг. 4b иллюстрирует второй сигнал, обеспечиваемый реверсивным датчиком и три сигнала, полученные на основе этого второго сигнала,
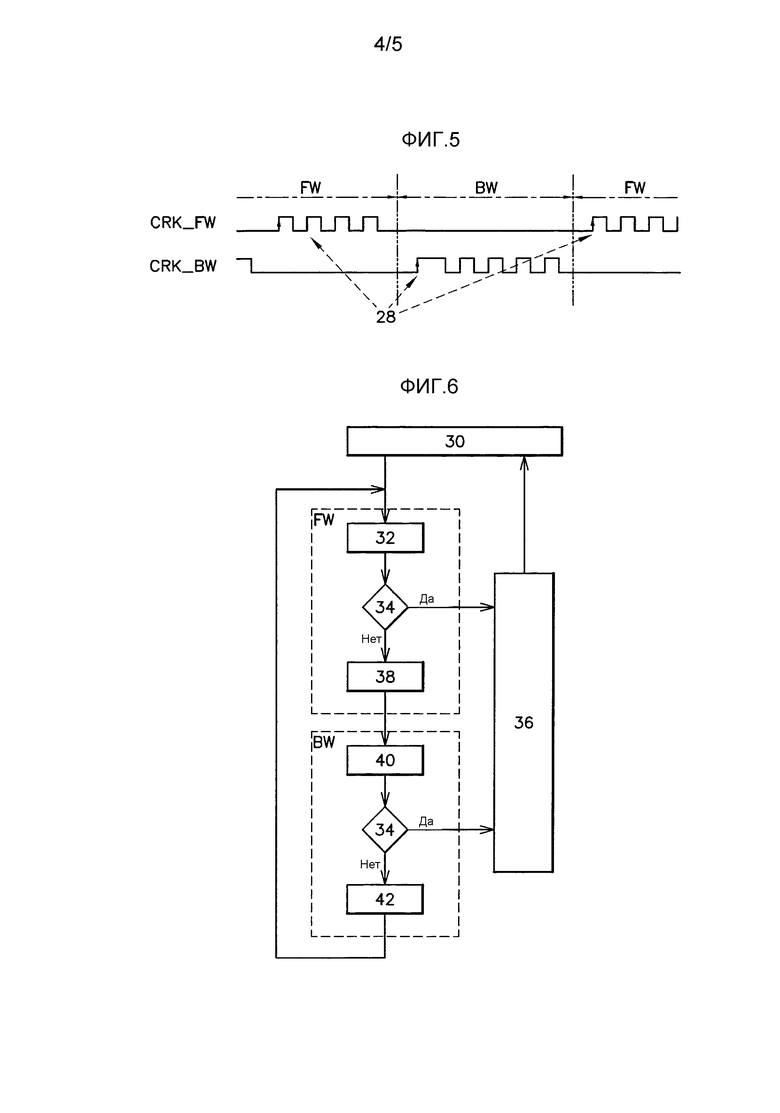
- Фиг. 5 схематично иллюстрирует этап, который может быть реализован в данном изобретении,
- Фиг. 6 является последовательностью операций, которая может быть использована для реализации данного изобретения, и
- Фиг. 7 схематично иллюстрирует реализацию данного изобретения.
Фиг. 1 иллюстрирует типовой модуль таймера, далее называемый GTM. Такой модуль может быть использован в пределах электронной системы управления двигателя внутреннего сгорания. Внутри этого модуля находится первый компонент 2, отвечающий за управление синхронизацией положения соответствующего двигателя, а также за генерацию углового синхронизирующего сигнала. Этот первый компонент 2 является, например, цифровой системой фазовой автоподстройки частоты (DPLL).
Первый компонент 2 известен из предшествующего уровня техники. Обычно он принимает два сигнала, поступающие от датчиков (не представлены), встроенных в соответствующий двигатель. Первый сигнал поступает от датчика, связанного с зубчатой мишенью, прикрепленной к коленчатому валу двигателя. Такая мишень обычно содержит тридцать шесть или шестьдесят зубьев (без учета одного или двух отсутствующих зубьев, обеспечивающих возможность обеспечения определения разрыва у точки начала отсчета на мишени), таким образом, вырабатывая точный сигнал для определения положения указанного коленчатого вала. Второй сигнал, используемый в предшествующем уровне техники с использованием первого компонента 2, является менее точным сигналом, поступающим, например, от датчика, связанного с мишенью, вращающейся с распределительным валом двигателя. Однако, так как скорость вращения распределительного вала точно соответствует половине скорости вращения коленчатого вала, принимаемый сигнал, поступающий от распределительного вала, обеспечивает возможность выяснения положения двигателя в пределах 720°, также называемое «фазировкой» или «синхронизацией» двигателя внутреннего сгорания.
Для некоторых двигателей необходимо точное выяснение положения двигателя, когда последний остановился. Теперь, когда двигатель останавливается, коленчатый вал механически колеблется около своего положения равновесия, в котором он, в конце концов, остановится. При этом коленчатый вал попеременно поворачивается в одном направлении и, затем, в другом направлении.
В последующем описании принято, что направление вращения, соответствующее направлению вращения двигателя в работе, называется прямым (или FW) направлением вращения. Противоположное направление вращения называется обратным (или BW) направлением вращения.
Для определения положения двигателя при остановке, требуется не только обнаруживать зубья мишени, проходящие перед соответствующим датчиком, но и направление прохождения этих зубьев. С этой целью, существуют датчики, называемые реверсивными датчиками, которые обеспечивают сигнал, который, с одной стороны, обеспечивает возможность обнаружения прохождения каждого зуба и, с другой стороны, дает индикацию направления прохождения соответствующего зуба.
Фиг. 3 иллюстрирует примерный сигнал, обеспечиваемый реверсивным датчиком. Следует отметить, что этот сигнал образован из интервалов времени двух различных типов. В левой части фиг. 3 находятся интервалы времени уменьшенной длительности. Затем имеется пунктирная линия 4, указывающая здесь на изменение направления вращения двигателя внутреннего сгорания. Справа от этой пунктирной линии 4, интервалы времени представленного сигнала имеют большую ширину. Таким образом, существуют узкие интервалы времени и широкие интервалы времени. Фиг. 2 позволяет сравнить узкий интервал времени с широким интервалом времени.
Каждый интервал времени сигнала, показанного на фиг. 3, имеет первый активный перепад 6. Последний используется для управления угловым синхронизирующим сигналом, генерируемым в первом компоненте 2. Длительность интервала времени, затем, используется для определения направления вращения зуба перед соответствующим датчиком. Первый компонент 2 фактически программируется, с одной стороны, для обнаружения первого активного перепада 6 и, с другой стороны, для определения длительности интервала времени. Значение порога, называемое THMI, записывается в регистре первого компонента 2. Пока длительность интервала времени остается ниже значения THMI, первый компонент считает, что зуб прошел перед датчиком в прямом направлении вращения. В противном случае, он считает, что зуб прошел перед датчиком в обратном направлении вращения.
На фиг. 3, таким образом, представлен сигнал, соответствующий, во-первых, прохождению трех зубьев перед соответствующим датчиком в прямом направлении вращения. Пунктирная линия 4 показывает, как упомянуто выше, изменение направления вращения коленчатого вала, и, следовательно, мишени, сопряженной с ним. Затем следующий зуб проходит перед датчиком, перемещаясь в обратном направлении. Следовательно, рассматривается зуб, который только что прошел перед датчиком, перемещаясь в прямом направлении, непосредственно перед изменением направления вращения коленчатого вала. Обнаружение первым компонентом изменения направления, показанного пунктирной линией 4, выполняется, только когда соответствующий интервал времени проанализирован первым компонентом 2, то есть, по существу, с момента, показанного схематично на фиг. 3 стрелкой 8. Предполагается, что вторые перепады 10 интервалов времени сигнала, показанного на фиг. 3, являются неактивными перепадами, поскольку они не соответствуют изменению формы на мишени. Однако, эти вторые перепады 10 используются для определения направления вращения коленчатого вала.
Эта стратегия обнаружения предшествующего уровня техники работает. Однако, появляются новые реверсивные датчики с режимами функционирования, отличающимися от режимов, описанных выше, которые обеспечивают сигналы с формами, отличающимися от форм, показанных на фиг. 3. Задача, которую данное изобретение предполагает решить, заключается в обеспечении возможности использования первого компонента 2 для генерации углового синхронизирующего сигнала с использованием сигналов, тип которых отличается от типа сигналов, которые показаны на фиг. 2 и 3. Предполагается, посредством иллюстративного, но неограничивающего примера, что сигналы, обеспечиваемые новым реверсивным датчиком, имеют тип сигналов CRK фиг. 4a и 4b. Следует отметить, что эти сигналы имеют вид интервалов времени. Однако, в то время как сигналы, показанные на фиг. 2 и 3, имели только нижний уровень и верхний уровень, следует отметить, что сигналы CRK фиг. 4a и 4b содержат низкоуровневые сегменты 12, высокоуровневые сегменты 14 и сегменты 16 промежуточного уровня. Низкий уровень соответствует, например, напряжению 0 В, высокий уровень соответствует, например, напряжению 5 В, в то время как промежуточный уровень может соответствовать напряжению 2,5 В. В сигнале CRK, когда разница напряжения на уровне интервала времени составляет порядка 5 В, это означает, что зуб проходит перед датчиком в прямом направлении вращения. Когда разница напряжения на уровне интервала времени составляет порядка 2,5 В, тогда это означает, что зуб проходит перед соответствующим датчиком в обратном направлении вращения.
На фиг. 4a и 4b представлена штрихпунктирная линия 4', которая соответствует изменению направления коленчатого вала для двух отдельных датчиков. Сигнал CRK фиг. 4a соответствует первому типу датчика, который обеспечивает сигнал уровня 0 В и 2,5 В для обратного вращения, а сигнал CRK фиг. 4b соответствует второму типу датчика, который обеспечивает сигнал уровня 2,5 В и 5 В для обратного вращения. В качестве функции датчика, активный перепад интервала времени сигнала может быть либо первым фронтом, или вторым срезом. На фиг. 4a и 4b, активные перепады обозначены стрелкой на сигнале. Здесь следует отметить, что активные перепады сигналов CRK являются срезами.
Следует отметить, что сигналы этого типа не могут быть обработаны как есть первым компонентом 2. Данное изобретение предлагает обеспечить совместимость таких сигналов с первым компонентом 2, описанным выше.
Здесь предлагается обработать сигнал, полученный реверсивным датчиком, для генерации трех отдельных сигналов, обозначенных на фиг. 4a и 4b CRK_CNT, CRK_FW и CRK_BW.
Первый сигнал CRK_CNT использует все фронты и срезы сигнала CRK и, таким образом, образует интервалы времени. Здесь, однако, принимаются меры для того, чтобы сигнал CRK_CNT имел только низкоуровневые сегменты и высокоуровневые сегменты. Низкий уровень может соответствовать напряжению 0 В, в то время как высокий уровень может соответствовать напряжению 2.5 В или 5 В, например.
Второй сигнал CRK_FW является сигналом, подобным сигналу CRK_CNT, но для которого интервалы времени, соответствующие прохождениям зубьев в обратном направлении вращения, «удалены». Этот второй сигнал CRK_FW является, следовательно, таким, что, когда коленчатый вал вращается в обратном направлении, уровень этого второго сигнала является постоянным. Как показано на фиг. 4a и 4b, постоянный уровень может быть либо низким уровнем, либо высоким уровнем.
Третий сигнал CRK_BW, сгенерированный на основе сигнала CRK, имеет, подобным образом, интервалы времени, только когда коленчатый вал вращается в обратном направлении вращения. Сигнал постоянного уровня, следовательно, получается, когда коленчатый вал вращается в прямом направлении вращения, а интервалы времени, соответствующие прохождениям зубьев перед датчиком, получаются, когда коленчатый вал вращается в обратном направлении вращения. Здесь можно отметить, что этот третий сигнал CRK_BW может быть получен посредством вычисления разности между сигналом CRK_CNT и CRK_FW.
Предлагается, чтобы первый сигнал CRK_CNT вводился на первый вход 18 первого компонента 2. Этот первый вход 18 является входом, обеспеченным для приема сигнала такого типа, который показан на фиг. 3. Первый сигнал CRK_CNT, затем, вводится на второй вход 20 модуля GTM на уровне электронного компонента типа второго компонента 24. Последний автоматически ретранслирует, без задержки, сигнал, принятый на первый вход 18 первого компонента 2.
Второй сигнал CRK_FW и третий сигнал CRK_BW вводятся, соответственно, на третий вход 22 и четвертый вход 23 модуля GTM. Затем второй сигнал CRK_FW и третий сигнал CRK_BW каждый вводятся в электронный компонент типа второго компонента 24, который предназначен для обнаружения перепадов сигналов, которые он принимает на своем входе. Как для второго сигнала CRK_FW, так и для третьего сигнала CRK_BW, вторые компоненты 24 могут, таким образом, обнаруживать активный перепад каждого из этих сигналов (здесь активный перепад может быть фронтом или срезом, но в представленном типичном случае он является срезом).
Здесь следует отметить, что для их обработки, сигналы при необходимости могут фильтроваться. Тогда, соответственно, следует учесть ограничение длительности отклика (задержку) фильтра.
Элемент информации, обеспечиваемый вторыми компонентами 24, в отношении уровня, отправляется непосредственно к устройству 26 генерации последовательности модуля GTM посредством модуля передачи, обозначенного ARU на фиг. 3. Каждое устройство 26 генерации последовательности находится постоянно в резерве, ожидая первый перепад, указывающий на изменение направления. С учетом характеристик второго сигнала CRK_FW и третьего сигнала CRK_BW, здесь предлагается, чтобы после обнаружения активного перепада на одном сигнале (CRK_FW или CRK_BW), наблюдался другой сигнал (CRK_BW или CRK_FW) для обнаружения на последнем первого активного перепада, который прибудет. Последний информирует об изменении направления вращения. Фиг. 5 иллюстрирует перепады 28 изменения направления на примере сигналов CRK_FW и CRK_BW.
Таким образом, после каждого обнаружения изменения направления, устройство 26 генерации последовательности изменяет сигнал для подготовки себя для следующего изменения направления. Кроме того, устройство 26 генерации последовательности, затем, использует запрос на программное прерывание, связанный с этим устройством генерации последовательности. Этот запрос прерывания выполняется на электронном компоненте, внешнем по отношению к GTM. Этот внешний компонент является, например, компонентом типа DMA («прямого доступа к памяти» («Direct Memory Access»)). Прерывание в DMA-компоненте связано с автоматическим преобразованием, которое используется для изменения значения регистра THMI, определенного выше, со ссылкой, главным образом, на фиг. 2.
В сопряженной электронной памяти, буферная память, или только буфер, содержит два значения. Здесь предлагается, чтобы значения THMI_MIN и THMI_MAX выбирались в качестве значений для буферной памяти.
Первое значение, например, THMI_MAX, буферной памяти, соответствует максимальному значению, которое может быть взято регистром THMI. Когда оно записывается в регистр THMI, это значение всегда будет больше, чем измеренная длительность зуба, которая сравнивается с THMI. Тогда предполагается, по умолчанию, что мишень вращается в прямом направлении.
Второе значение, THMI_MIN, является значением, намеренно выбранным очень низким, так что первый компонент 2 тогда видит все интервалы времени в виде широких интервалов времени, то есть, имеющих большую ширину, чем ширина порога. В данном случае, THMI_MIN сможет взять, например, значение «1», поскольку предполагается, что значение «0» используется для полной деактивации стратегии обнаружения направления. В этом типичном случае, как объяснено выше, таким образом, предполагается, что мишень проходит перед реверсивным датчиком в обратном направлении вращения.
Таким образом, всегда, когда запрашивается программное прерывание, при проходе через компонент DMA-типа, значение регистра THMI немедленно модифицируется, таким образом, переключаясь последовательно со значения THMI_MIN и, затем, THMI_MAX, и т.д., и т.п. Время для выполнения изменения значения регистра THMI является очень коротким и остается меньшим, чем длительность активного уровня. Таким образом, значение этого регистра изменяется перед обработкой неактивного перепада с использованием указанного значения. Аналогично, если обнаружение выполняется на неактивном перепаде, то изменение значения регистра будет действительным для следующего активного перепада. Все описанные этапы в отношении изменения значения в регистре THMI, от обнаружения активного перепада на одном из сигналов, указывающего на изменение направления, выполняются немедленно и не вызывают никакой задержки. Необходимо, таким образом, бессдвиговое обновление первого компонента 2, когда обнаруживается изменение направления. Другое средство может быть реализовано для изменения значения регистра THMI. Может быть предусмотрена, например, программная обработка в пределах сопряженного микропроцессора. В системе управления двигателя внутреннего сгорания, это решение может быть предусмотрено, поскольку обнаружение обратного направления вращения выполняется, только когда двигатель останавливается, то есть, при очень низких оборотах, и, таким образом, в момент, когда нагрузка на программное обеспечение является низкой.
Фиг. 6 представляет в виде алгоритма обработку обнаружения изменения направления в пределах устройства 26 генерации последовательности. Первым этапом 30 является этап инициализации. Обнаружение направления начинается, только если система готова к работе. После запуска двигателя, последний всегда приводится в движение в том направлении, которое соответствует прямому направлению вращения. После запуска, устройство 26 генерации последовательности, таким образом, учитывает, что мишень должна вращаться в прямом направлении вращения. В ходе этапа 32 оно анализирует сигнал CRK_BW, передаваемый ARU, в резерве, ожидая активный перепад на этом сигнале. Во время этого обнаружения, ARU может принять команду от сопряженного микропроцессора (блок 34), запрашивающую прекращение функционирования и, следовательно, обнаружения направления вращения. Затем обеспечен этап 36 для остановки обнаружения направления вращения коленчатого вала. Это решение может соответствовать, например, типичному случаю, когда двигатель глохнет или случаю потери синхронизации или фазировки. В этом случае, повторно запускается процесс (этап 30) инициализации.
Пока никакие команды не принимаются от сопряженного микропроцессора, отслеживание продолжается, пока не будет получено (этап 38) обнаружение активного перепада на сигнале CRK_BW. Во время этого этапа 38, запрашивается программное прерывание, и последнее приводит к изменению значения регистра THMI. В приведенном выше численном примере, регистр THMI, тогда, принимает значение THMI_MAX.
Затем устройство 26 генерации последовательности переходит сразу и без задержки к следующему этапу 40. Этот этап соответствует этапу 32, описанному ранее, но здесь устройство 26 генерации последовательности находится в резерве, ожидая активный перепад на сигнале CRK_FW. Способом, подобным описанному выше (блок 34'), обнаружение может быть остановлено по команде сопряженного микропроцессора. В случае остановки, устройство 26 генерации последовательности переходит к этапу 36, объясненному ранее.
Когда обнаруживается активный перепад на сигнале CRK_FW (этап 42), программное прерывание запускается и предписывает изменение значения регистра THMI. Тогда последний принимает значение THMI_MIN в численном примере, приведенном выше. Затем изменение направления записывается первым компонентом 2, и устройство генерации последовательности сразу возвращается к этапу 32 обнаружения на сигнале CRK_BW.
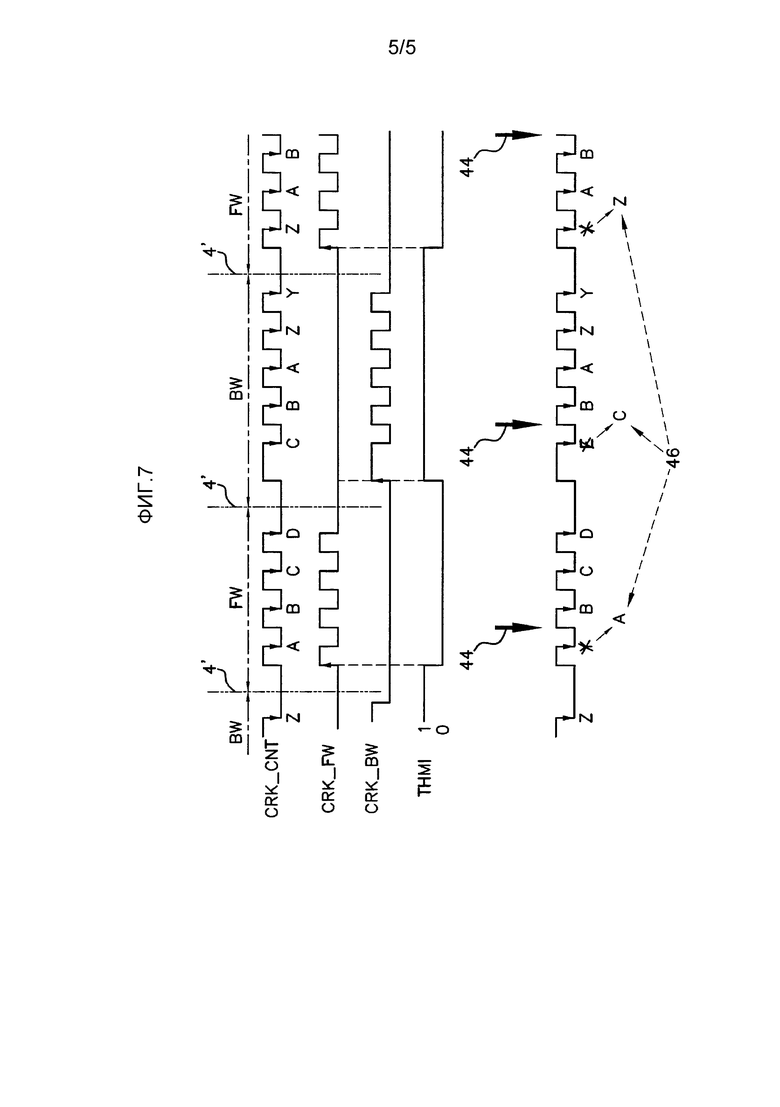
Фиг. 7 иллюстрирует данное изобретение с помощью сигналов, генерируемых на основе сигнала, обеспечиваемого реверсивным датчиком. На этой фигуре представлены штрихпунктирные линии 4', соответствующие изменениям направления. На левой части фигуры, предполагается, что мишень вращается в обратном направлении. Направления вращения (BW для обратного направления и FW для прямого направления) указаны вверху фиг. 7.
Представлен сигнал CRK_CNT. Он имеет форму интервалов времени и стрелку, каждый раз указывающую на активный перепад интервала времени. Для данной иллюстрации, зубья мишени пронумерованы буквами латинского алфавита.
Ниже сигнала CRK_CNT находятся сигналы CRK_FW и CRK_BW. На этих сигналах, стрелка указывает на активные перепады, позволяющие обнаруживать изменение направления. Ниже сигнала CRK_BW, график иллюстрирует значения, принятые регистром THMI. Каждому перепаду, соответствующему изменению направления, обнаруженному на сигналах CRK_BW и CRK_FW, соответствует изменение значения регистра THMI.
Последняя линия на фиг. 7 соответствует обработке, выполненной первым компонентом 2 (DPLL). Сигнал, принимаемый этим первым компонентом, соответствует сигналу CRK_CNT, который вводится на первый вход 18 этого компонента. Стрелки 44 показывают обнаружение изменения направления первым компонентом 2. Следует отметить, что обнаружение изменения направления выполняется с задержкой на один зуб. С учетом задержки обнаружения первым компонентом 2 изменения направления, целесообразно исправить номер зуба, обнаруженного первым компонентом 2 непосредственно перед обнаружением изменения направления. Эти автоматические исправления 46 показаны внизу фиг. 7. Таким образом, первый компонент 2 корректно анализирует принимаемый сигнал и может обеспечить точный угловой синхронизирующий сигнал.
Главное преимущество, предоставленное решением, предложенным данным изобретением, состоит в обеспечении возможности использования компонента, приспособленного для обработки типа сигнала, обеспечиваемого одним реверсивным датчиком, для другого реверсивного датчика, обеспечивающего другие сигналы. Внутренняя стратегия цифровой системы фазовой автоподстройки частоты для обнаружения изменения направления остается неизменной.
Эта адаптация выполняется здесь, в то же время ограничивая электронное средство, подлежащее реализации для выполнения этой адаптации. Электронное аппаратное обеспечение, необходимое здесь, соответствует только средству для обработки сигнала реверсивного датчика. Такое средство стоит значительно меньше, чем разработка и изготовление электронного компонента, интегрирующего адаптированное программное решение (ASIC).
Решение, предлагаемое здесь, имеет преимущество, кроме того, в отсутствии влияния на нагрузку на микропроцессор. Решение, описанное выше, использует только внутренние ресурсы типового модуля таймера (GTM), в сочетании с компонентом DMA-типа. Это также имеет преимущество в наличии немедленной обработки, которая устраняет любой риск неуправляемого нарушения синхронизации, относящийся к задержке в изменении конфигурации цифровой системы фазовой автоподстройки частоты.
Стратегия, предложенная здесь, является гибкой. Она может быть приспособлена к различным типам реверсивных датчиков, главным образом, разнообразным типам датчиков с изменяемым напряжением и с различными типами поведения в случае изменения направления. Кроме того, как выясняется из предшествующего описания, она также может быть приспособлена к аппаратному окружению. Здесь можно отметить, что эта гибкость может быть достигнута с использованием ASIC («специализированной интегральной схемы»).
Конечно, данное изобретение не ограничено вариантом осуществления, описанным выше в качестве неограничивающего примера, и его различными упомянутыми вариантами осуществления. Оно также относится ко всем различным вариантам осуществления в пределах объема изобретения, понятых специалистами в данной области техники на основе этого описания.
Изобретение относится к способу обработки сигнала, обеспечиваемого реверсивным датчиком. Способ обработки сигнала (CRK), обеспечиваемого реверсивным датчиком, содержит следующие этапы: генерация первого сигнала (CRK_CNT), использующего все интервалы времени сигнала, обеспечиваемого датчиком, генерация второго сигнала (CRK_FW), использующего интервалы времени, соответствующие первому направлению прохождения, генерация третьего сигнала (CRK_BW), использующего интервалы времени, соответствующие второму направлению прохождения, подключение первого сигнала к входу первого электронного компонента, подключение второго сигнала и третьего сигналов ко второму электронному компоненту, обнаружение вторым электронным компонентом перепадов принятых сигналов, изменение значения заданного порога (THMI) в первом компоненте после каждого обнаружения перепада. Техническим результатом является обеспечение надежного определения углового положения соответствующего двигателя. 3 н. и 4 з.п. ф-лы, 8 ил.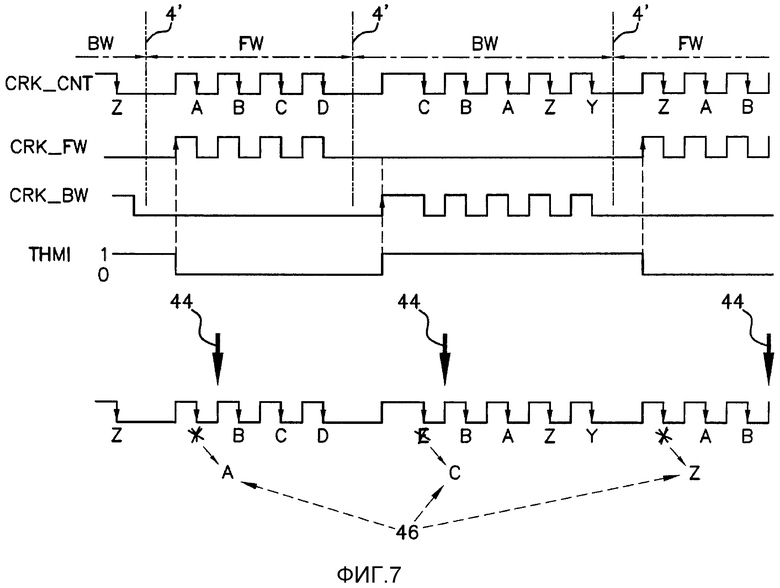
1. Способ обработки сигнала (CRK), обеспечиваемого реверсивным датчиком, обнаруживающим прохождение зубьев мишени, с целью генерации углового синхронизирующего сигнала двигателя внутреннего сгорания с помощью первого электронного компонента (2), принимающего сигнал, поступающий от реверсивного датчика, причем упомянутый первый компонент (2) имеет средство для определения в сигнале, имеющем низкоуровневые сегменты и высокоуровневые сегменты, является ли длительность сегмента данного уровня большей, чем заданный порог (THMI), или нет, и причем сигнал (CRK), обеспечиваемый реверсивным датчиком, является сигналом в виде интервалов времени, содержащих по меньшей мере низкоуровневые сегменты, высокоуровневые сегменты и сегменты промежуточного уровня, причем каждый интервал времени соответствует прохождению зуба мишени перед датчиком и причем сигнал также содержит характеристики, обеспечивающие возможность определения направления прохождения зуба, отличающийся тем, что он содержит следующие этапы:
- генерация первого сигнала (CRK_CNT), использующего все интервалы времени сигнала, обеспечиваемого датчиком, но имеющего только сегменты, соответствующие первому уровню, и сегменты, соответствующие второму уровню,
- генерация второго сигнала (CRK_FW), использующего интервалы времени сигнала, обеспечиваемого датчиком, и соответствующего первому направлению прохождения зуба перед датчиком, и имеющего постоянный уровень во время вращения мишени во втором направлении прохождения,
- генерация третьего сигнала (CRK_BW), использующего интервалы времени сигнала, обеспечиваемого датчиком, и соответствующего второму направлению прохождения зуба перед датчиком, и имеющего постоянный уровень во время вращения мишени в первом направлении прохождения,
- подключение первого сигнала (CRK_CNT) к входу первого электронного компонента (2),
- подключение второго сигнала (CRK_FW) и третьего сигнала (CRK_BW) ко второму электронному компоненту (24),
- обнаружение вторым электронным компонентом (24) фронтов и/или срезов второго сигнала (CRK_FW) и третьего сигнала (CRK_BW),
- изменение значения заданного порога (THMI) в первом компоненте (2), когда второй электронный компонент (24) обнаруживает перепад на одном из двух сигналов, подключенных ко второму компоненту, в то время как предыдущий перепад обнаружен на другом сигнале, причем значение порога может принять либо первое заданное значение, выражающее максимальное значение, либо второе значение, выражающее заданное минимальное значение, таким образом, что длительность интервалов времени находится всегда на одной и той же стороне от соответствующего порога.
2. Способ обработки по п. 1, отличающийся тем, что третий сигнал (CRK_BW) получают взятием разности между первым сигналом (CRK_CNT) и вторым сигналом (CRK_FW).
3. Способ обработки по одному из пп. 1 и 2, отличающийся тем, что обнаружение фронтов и/или срезов второго сигнала (CRK_FW) и третьего сигнала (CRK_BW) выполняется посредством выполнения обнаружения на одном сигнале, и затем, как только нужный перепад обнаружен, обнаружение выполняется исключительно на другом сигнале, пока нужный перепад не будет на нем обнаружен.
4. Электронное устройство, содержащее средство для реализации каждого из этапов способа обработки по одному из пп. 1-3.
5. Электронное устройство по п. 4, отличающееся тем, что оно содержит типовой модуль таймера (GTM), внутри которого встроены первый компонент (2) и второй компонент (24), а также по меньшей мере один третий компонент снаружи типового модуля таймера, для генерации первого (CRK_CNT), второго (CRK_FW) и третьего (CRK_BW) сигналов.
6. Электронное устройство по одному из пп. 4 и 5, отличающееся тем, что первый компонент (2) является системой фазовой автоподстройки частоты.
7. Система управления двигателя внутреннего сгорания, отличающаяся тем, что она содержит электронное устройство по одному из пп. 4-6, а также по меньшей мере один реверсивный датчик.

