Группа изобретений относится к способу и устройству для определения местоположений монтажа колес транспортного средства в автомобиле.
Давление в шинах колеса транспортного средства вследствие самых разных причин, например в результате давления окружающей среды на колеса, температуры, возраста колеса и прочего, подвергается определенным изменениям. В этой связи было установлено, что неправильно отрегулированное давление в шинах представляет собой существенный фактор в случае аварий в дорожном движении. Так как безопасность транспортного средства и надежность являются центральными факторами в области автомобилестроения, уже в одних только целях техники безопасности необходимо регулярно проверять давление в шинах. Но исследования показали, что только небольшое количество водителей транспортного средства регулярно проверяет давление в шинах. Современные автомобили, в частности, в этих целях снабжены устройствами информации о шинах, такими как системы контроля давления в шинах. Эти устройства информации о шинах снабжены встроенными в колесо транспортного средства блоками электроники колеса, которые измеряют характерные для колес измеряемые значения разных измеряемых параметров (например давление в шинах, температуру шин, нагрузку на шины и прочее) и передают полученные на их основании показания на приемное устройство, находящееся на транспортном средстве.
Системы информации о шинах применяют обычно электронные блоки колес, предусмотренные для каждого колеса транспортного средства, которые посредством высокочастотных посылаемых сигналов передают данные, определенные в колесах транспортного средства, на центральное устройство аналитической оценки, находящееся на транспортном средстве. Под электронным блоком колеса, которое в дальнейшем сокращенно называется электроникой колеса, может пониматься любое устройство, определяющее характерные для колес показания и состояния, посредством которых могут быть обнаружены состояния неисправности, возможно возникающие в колесе транспортного средства. Термин «состояние неисправности» в настоящем контексте должен толковаться широко и включает в себя все состояния, свойства и показания соответствующего колеса, которые могут рассматриваться как достойные обнаружения.
В этой связи возникает проблема, которая заключается в том, чтобы автоматически и однозначно производить соотнесение принятого сигнала передачи с изначально неизвестным положением колеса передатчика, то есть электроники колеса. Правда электроника колеса может передавать вместе с передаваемым сигналом передачи кодовый сигнал опознавания, который является однозначным для данной электроники колеса, как это описано в EP 626911 B1. Однако при этом еще неизвестно, в каком месте транспортного средства фактически установлено, то есть смонтировано это колесо транспортного средства. Поэтому в современных системах информации о шинах дополнительно с непосредственным обнаружением состояния неисправности определяется также так называемое местоположение монтажа отдельных колес транспортного средства на этом транспортном средстве. В специальной литературе это также называется локализацией.
В этой связи в основу настоящего изобретения положена задача предложить как можно более простую и надежную локализацию колес транспортного средства.
В соответствии с изобретением эта задача решается посредством способа с признаками п.1 формулы изобретения и/или посредством устройства с признаками п.13 формулы изобретения и/или посредством транспортного средства с признаками п.15 формулы изобретения.
Соответственно этому предусмотрено:
- способ локализации местоположений монтажа колес транспортного средства в автомобиле, при котором, по меньшей мере, одно колесо транспортного средства снабжено электроникой колеса, включающий в себя следующие этапы: определение посредством электроники колеса первого положения угла поворота колеса транспортного средства, соответствующего этой электроники колеса; передача посылаемого сигнала с первым показанием угла поворота, зависящим от определенного первого положения угла поворота; определение на транспортном средстве вторых положений угла поворота колес транспортного средства и в зависимости от этого предоставление второго показания угла поворота; сравнение первого показания угла поворота со вторыми показаниями угла поворота; определение местоположения монтажа колеса, соответствующего этой электроники колеса, в зависимости от этого сравнения.
- Устройство для локализации местоположений монтажа колес транспортного средства в автомобиле, в частности, посредством предлагаемого изобретением способа, включающее в себя, по меньшей мере, один блок электроники колеса, который установлен в колесе транспортного средства и который предназначен для того, чтобы определять первое положение угла поворота соответствующего ему колеса транспортного средства и передавать первое показание угла поворота, зависящее от определенного первого положения угла поворота, на приемное устройство, находящееся на транспортном средстве; включающее в себя, по меньшей мере, один установленный на транспортном средстве датчик частоты вращения, который предназначен для того, чтобы определять соответственно вторые положения угла поворота каждого из соответствующих им колес и в зависимости от этого предоставлять вторые показания угла поворота; включающее в себя устройство аналитической оценки, которое сравнивает первое показание угла поворота с, по меньшей мере, двумя вторыми показаниями угла поворота и в зависимости от этого сравнения определяет местоположение монтажа колеса, соответствующего этой электроники колеса.
- Транспортное средство, в частности легковой автомобиль, снабженный несколькими колесами и устройством информации о шинах, которое оснащено предлагаемым изобретением устройством.
Изобретение основано на том известном факте, что имеющиеся на транспортном средстве колеса транспортного средства в общем случае вследствие различных факторов, воздействий и условий вращаются с более или менее различными скоростями. Эти различные показания поворота в соответствии с изобретением применяются для определения местоположения монтажа, при этом показание угла поворота, определенное электроникой колеса, сравнивается с показанием угла поворота, определенным на транспортном средстве.
Описанный выше предлагаемый изобретением способ аналитической оценки и сравнения функционирует предпочтительно даже в случае только спорадической передачи радиосигналов. Однако при относительно редких передачах время конвергенции, обычно необходимое для локализации, соответственно увеличивается. Кроме того, электроника колеса не обязательно должна начинать передачу при каждом обороте или соответственно осуществлять в определенные интервалы времени, по меньшей мере, одну передачу, как это необходимо в известных способах, а достаточно, если электроника предпринимает аналитическую оценку, например, основанную на количестве совершенных оборотов колеса.
Также не является необходимым, чтобы обнаружение положения осуществлялось для каждого оборота колеса. Это также сокращает потребление энергии электроникой колеса, что представляет собой особое преимущество в связи с локальным энергоснабжением электроники колеса и таким образом с имеющимся в распоряжении ограниченным количеством энергии.
Кроме того, для предлагаемого изобретением способа также не представляет собой больших проблем движение транспортного средства по ухабистому или мокрому дорожному полотну, то есть по дорожному полотну с низким коэффициентом трения, или при слишком сильном буксовании колес транспортного средства. Напротив, для предлагаемого изобретением способа более или менее сильное буксование колес даже является предпочтительным, так как в данном случае отдельные колеса транспортного средства сильнее отличаются друг от друга по характеру своего вращения. Следовательно, не имеет также значения, какой путь проходит колесо транспортного средства или даже транспортное средство. Существенной является только ориентация или угол поворота колес транспортного средства.
Предпочтительные и усовершенствованные варианты осуществления изобретения содержатся в других зависимых пунктах формулы изобретения при совместном рассмотрении с фигурами чертежа.
В одном из предпочтительных вариантов осуществления изобретения электроникой колеса в различные моменты времени передаются несколько посылаемых сигналов, содержащих несколько первых показаний угла поворота, в соответствии с количеством посылаемых сигналов, и сравниваются с соответствующим количеством соответствующих вторых показаний угла поворота.
Обычно для определения местоположения монтажа используются, по меньшей мере, 2, предпочтительно, по меньшей мере, 6 и, в частности, наиболее предпочтительно, по меньшей мере, 20 переданных сигналов передачи.
В одном из предпочтительных вариантов осуществления электроникой колеса передаются разные сигналы передачи соответственно в известном, жестко заданном положении угла поворота этой электроники колеса, при этом на транспортном средстве для каждого принятого сигнала передачи в момент времени приема этого сигнала передачи определяются вторые положения угла поворота, на основании которых получаются вторые показания угла поворота.
В одном из предпочтительных вариантов осуществления для каждого колеса транспортного средства устанавливается распределение вторых показаний угла поворота, причем это распределение включает в себя вторые положения угла поворота, полученные на основании вторых показаний угла поворота (например на чертеже от 0° до 360°). Для определения местоположения монтажа осуществляется аналитическая оценка максимальных значений и/или дисперсий распределения.
В одном из предпочтительных вариантов осуществления то распределение, которое имеет наибольшие максимальные значения или соответственно наименьшие дисперсии, определяется как местоположение монтажа колеса транспортного средства, соответствующего этому распределению.
В одном из предпочтительных вариантов осуществления перед аналитической оценкой распределения обнаруживаются и исключаются выпадающие значения в распределении вторых положений угла поворота.
В одном из предпочтительных вариантов осуществления при скоплении вторых положений угла поворота около 0° или соответственно 360° распределение вторых положений угла поворота смещается на заданную величину по оси абсцисс, например, на 90° или 180°.
В одном из предпочтительных вариантов осуществления предусмотрено: (a) определение соответствующих вторых положений угла поворота для каждого колеса транспортного средства по меньшей мере для двух поочередно принятых на транспортном средстве сигналов передачи электроники колеса; (b) расчет значений разности соответствующих положений угла поворота для каждого колеса транспортного средства; (c) расчет частных от делений рассчитанных значений разности на значение, соответствующее одному полному обороту колеса транспортного средства; (d) определение местоположения монтажа в качестве того колеса транспортного средства, которое имеет наименьшее частное.
В одном из предпочтительных вариантов осуществления электроникой колеса передаются, по меньшей мере, N сигналов передачи. Для аналитической оценки и определения местоположения монтажа колеса транспортного средства используются, по меньшей мере, N/2, предпочтительно (N-1) и особенно предпочтительно до N*(N-1)/2 комбинаций вторых положений угла поворота, для которых соответственно выполняются этапы (b) и (c), причем на этапе (d) местоположение монтажа определяется в качестве такого колеса транспортного средства, которое кумулятивно имеет наименьшее частное и/или наименьшее распределение частных.
В одном из предпочтительных вариантов осуществления изобретения значения времени задержки, которые получаются вследствие составления электроникой колеса сообщения для сигнала передачи, намеренно введенных задержек или времени простоя, передачи сигнала передачи, приема и аналитической оценки сигнала передачи на транспортном средстве, ретрансляции первых показаний угла поворота, полученных на основании принятого сигнала передачи, определения и ретрансляции вторых показаний угла поворота и сравнения первых и вторых показаний угла поворота, совместно используются при аналитической оценке и при сравнении.
В одном из предпочтительных вариантов осуществления вторые датчики частоты вращения определяют вторые положения частоты вращения путем подсчета нарастающих и/или спадающих фронтов тактового импульса, при этом заданное количество фронтов тактового импульса соответствует одному полному обороту колеса транспортного средства.
В одном из предпочтительных вариантов осуществления предлагаемого изобретением устройства датчик частоты вращения выполнен в виде датчика частоты вращения системы ESP (электронной системы курсовой устойчивости) или датчика частоты вращения системы ABS (антиблокировочной системы).
Приведенные выше варианты осуществления и усовершенствованные варианты выполнения изобретения могут, в случае целесообразности, комбинироваться друг с другом произвольным образом. Другие возможные варианты осуществления, усовершенствованные варианты выполнения и варианты реализации изобретения включают в себя также не названные явно комбинации признаков изобретения, раскрытых в приведенном выше или нижеследующем описании примеров осуществления. В частности, специалист в области техники также добавит при этом отдельные аспекты, являющиеся усовершенствованными вариантами выполнения или дополнениями к соответствующему основному варианту настоящего изобретения.
Настоящее изобретение ниже поясняется подробнее с помощью примеров осуществления, показанных на фигурах чертежа, на которых изображено:
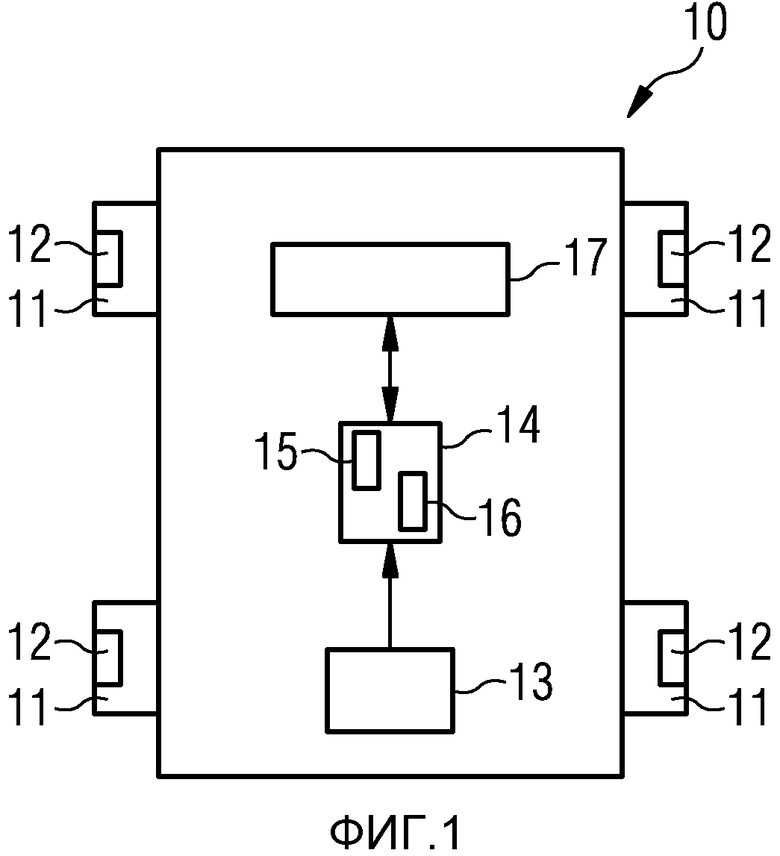
фиг.1: схематичное изображение транспортного средства, оснащенного предлагаемым изобретением устройством информации о шинах;
фиг.2A: блок-схема предлагаемого изобретением устройства для локализации местоположений монтажа колес транспортного средства в автомобиле;
фиг.2B: блок-схема последовательности операций, поясняющая процесс осуществления способа локализации местоположений монтажа согласно изобретению;
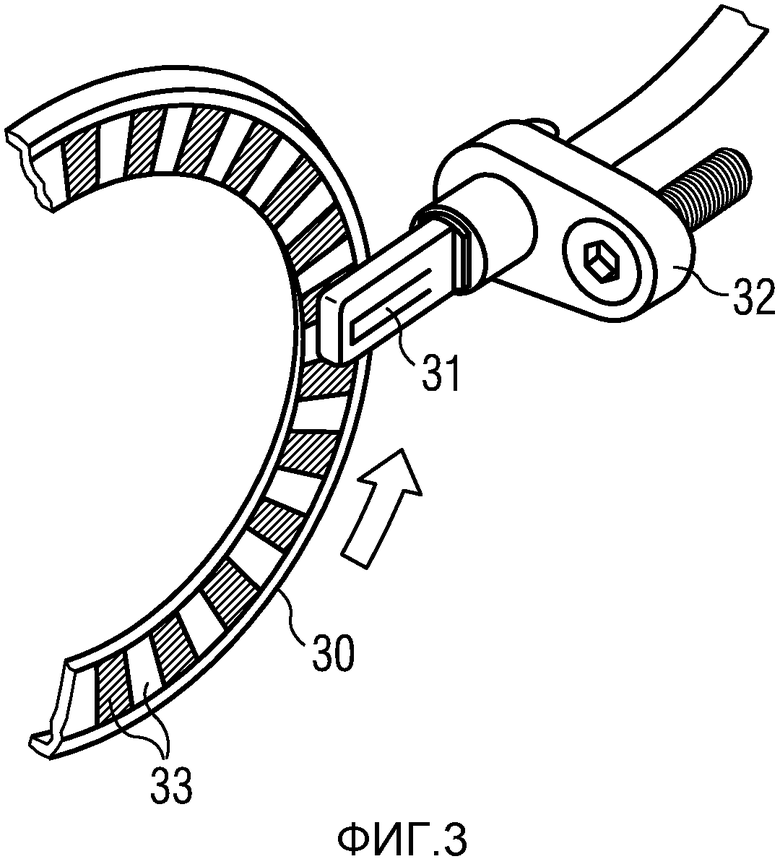
фиг.3: датчик частоты вращения;
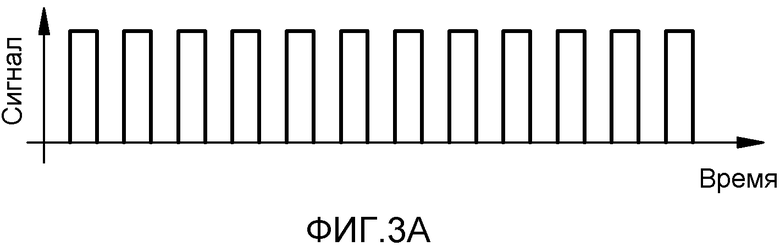
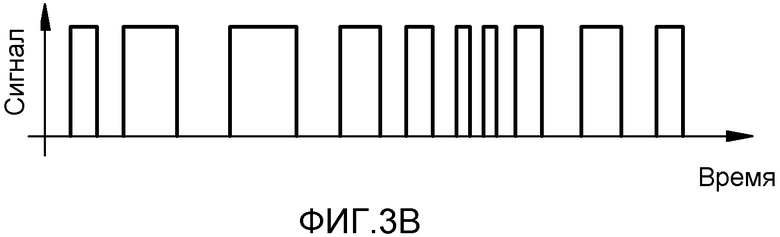
фиг.3A, 3B: соответственно выходные сигналы датчика частоты вращения для постоянной скорости и изменяющейся скорости колеса транспортного средства;
фиг.4: конфигурация транспортного средства, снабженного электроникой колеса и соответствующими датчиками частоты вращения;
фиг.5A-5D: распределения угловых положений колеса разных колес транспортного средства для разной электроники колеса;
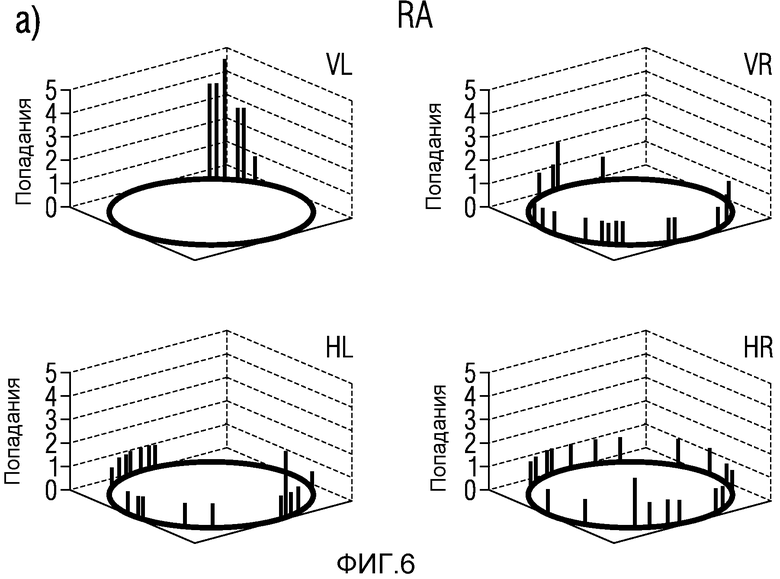
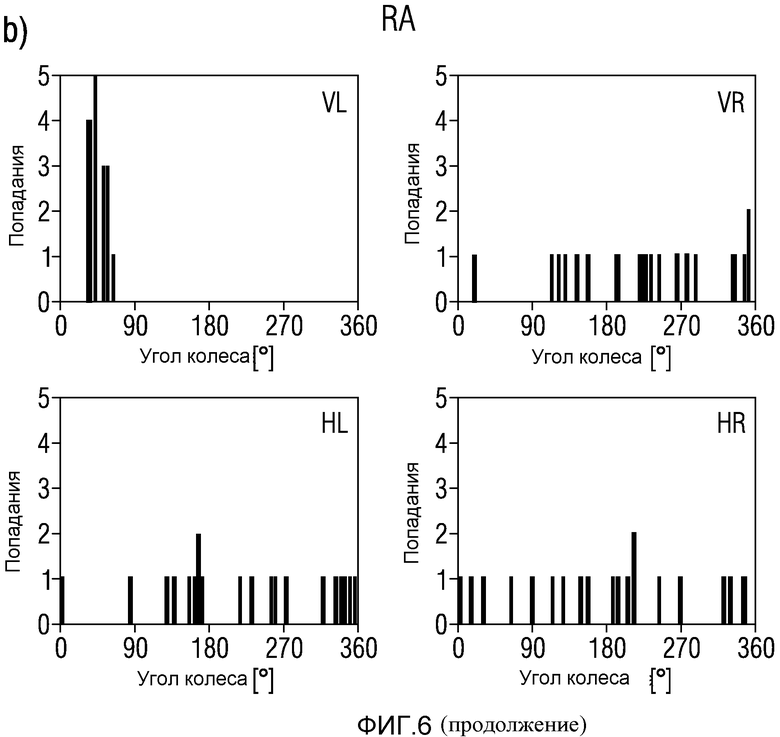
фиг.6A, 6B: распределения угловых положений колеса разных колес транспортного средства в электронике колеса в трехмерном или соответственно двухмерном изображении;
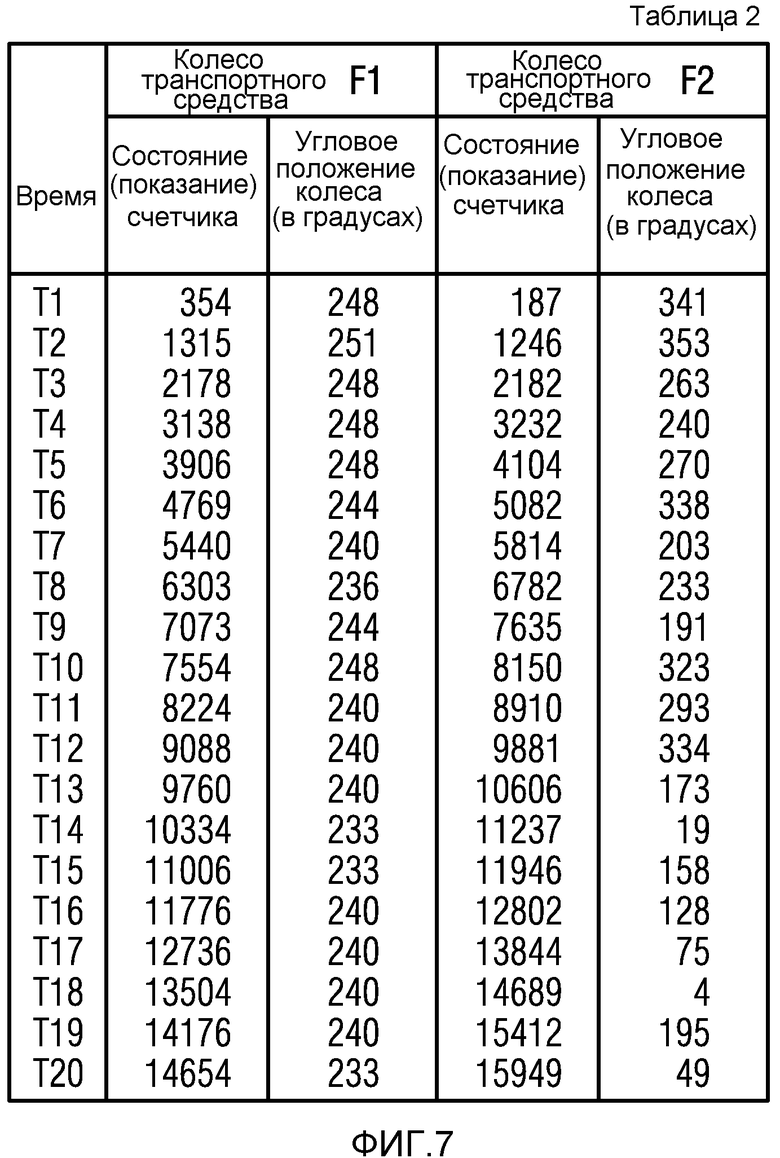
фиг.7: таблица моментов времени 20 эмиссий электроники колеса и соответствующие состояния счетчика и угловые положения двух разных колес транспортного средства;
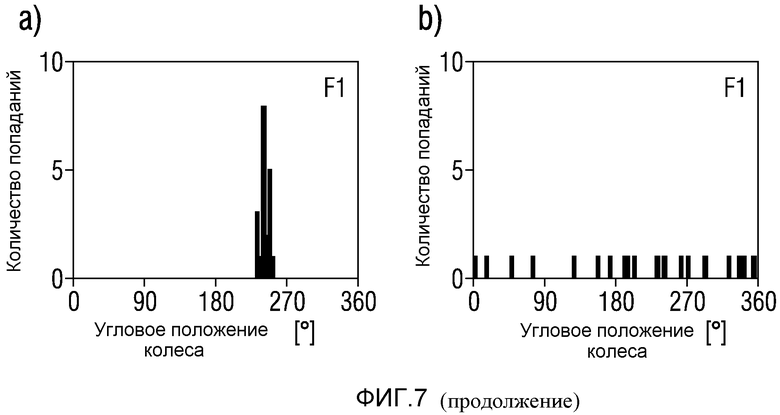
фиг.7A, 7B: распределения угловых положений для двух колес транспортного средства в соответствии с фиг.7;
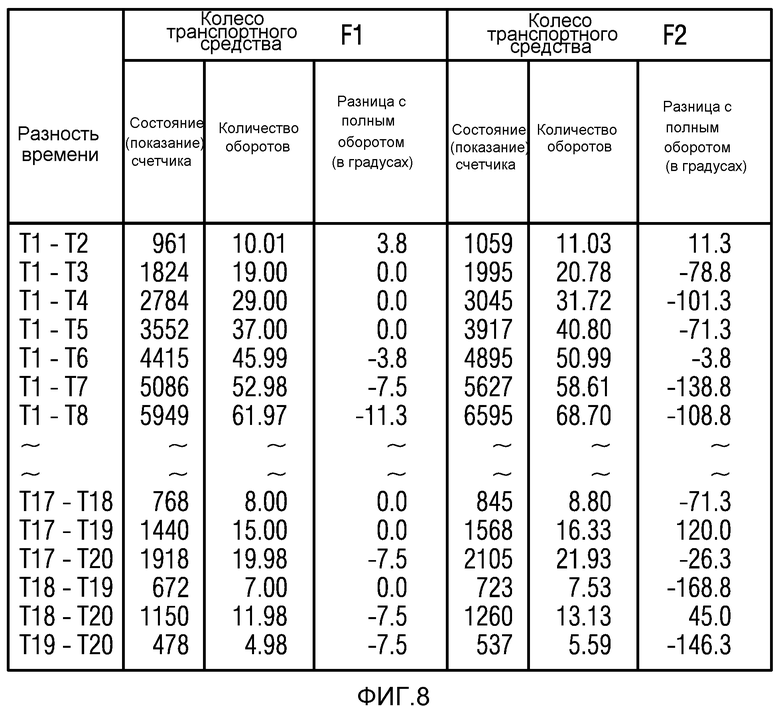
фиг.8: таблица разностей разных временных интервалов, соответствующих состояний счетчика, количества оборотов и разности при одном полном обороте для двух разных колес;
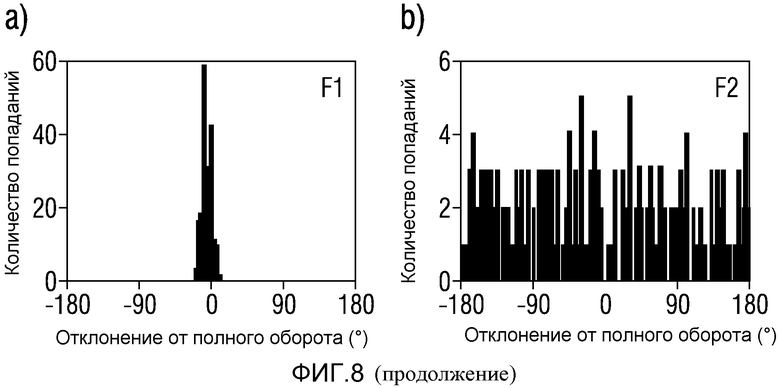
фиг.8A, 8B: соответствующие распределения для двух колес транспортного средства в соответствии с фиг.8;
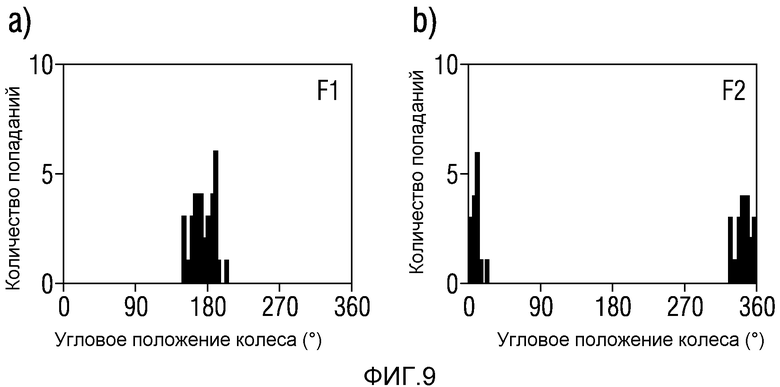
фиг.9A, 9B: два других распределения угловых положений колес для пояснения смещения;
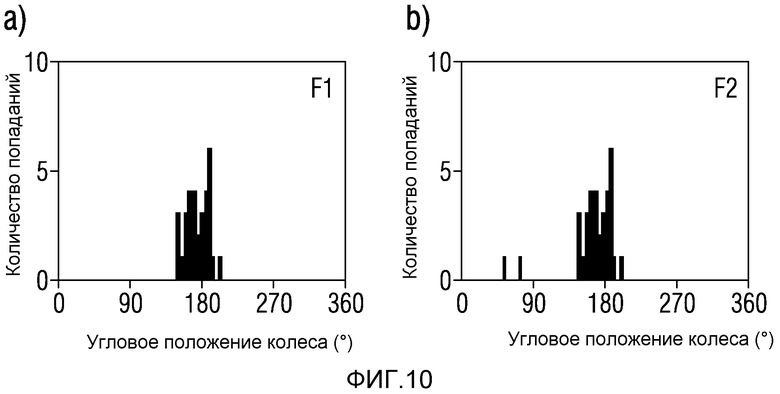
фиг.10A, 10B: два других распределения угловых положений колес для пояснения обнаружения и исключения выпадающих значений.
На фигурах чертежа - если не указано иное - одинаковые и выполняющие одинаковую функцию элементы в каждом случае снабжены одними и теми же обозначениями позиций.
На фиг.1 показано схематичное изображение транспортного средства, оснащенного устройством контроля давления в шинах. Обозначенное в данном случае позицией 10 транспортное средство снабжено четырьмя колесами 11 транспортного средства. Для каждого колеса 11 транспортного средства предусмотрен блок 12 электроники колеса. На транспортном средстве предусмотрен один (или, например, также два или больше) центральных блока 13 передачи/приема, которые находятся в коммуникационной связи с блоком 12 электроники колеса. Блок 12 электроники колеса и блок 13 передачи/приема в целом являются составной частью устройства информации о шинах, которое, кроме того, включает в себя центральное устройство 14 управления. Это устройство информации о шинах предназначено также для того, чтобы осуществлять локализацию разных колес транспортного средства 10. Это устройство 14 управления включает в себя также программно-управляемое устройство 15, например, микроконтроллер или микропроцессор, и запоминающее устройство 16, например ROM или DRAM. Транспортное средство 10 снабжено, кроме того, информационной системой 17 оповещения водителя.
На фиг.2A показана схематичная блок-схема предлагаемого изобретением устройства для локализации местоположения монтажа колес транспортного средства. Для этого сначала предоставляется автомобиль, снабженный устройством информации о шинах, которое включает в себя устройство для локализации местоположения монтажа колес транспортного средства. Это устройство на фиг.2A обозначено ссылочной позицией 20. Устройство 20 включает в себя, по меньшей мере, один блок 21 электроники колеса (в показанном примере два блока 21 электроники колеса), которые расположены соответственно в колесе 22 транспортного средства. Кроме того, устройство 20 включает в себя несколько установленных на транспортном средстве датчиков 23 частоты вращения, которые соотнесены соответственно с различными колесами 22 транспортного средства. Наконец, предусмотрено устройство 24 аналитической оценки, которое через систему 25 контроля стабильности соединено с датчиками 23 частоты вращения. Данное устройство 24 аналитической оценки включает в себя обычно (не показанное на этой фигуре) устройство приема и сравнения. Колеса 22 транспортного средства или соответственно предусмотренные в них блоки 21 электроники колеса находятся в коммуникационной связи с транспортным средством посредством беспроводной радиосвязи, чтобы передавать сигналы X1, X2 передачи на не показанное на фигурах приемное устройство, находящееся на транспортном средстве, которое, например, может быть предусмотрено в устройстве аналитической оценки. Система 25 контроля устойчивости может, например, представлять собой систему ABS и/или ESP, так что датчики 23 частоты вращения непосредственно не соединены с устройством 24 аналитической оценки. Связь между системой 25 контроля устойчивости и устройством 24 аналитической оценки может быть, например, выполнена в виде внутренней шины связи.
На фиг.2B показана блок-схема последовательности операций, изображающая предлагаемый изобретением способ локализации местоположения монтажа колес транспортного средства в автомобиле. Ниже предлагаемый изобретением способ коротко поясняется с помощью фиг.2A, 2B.
На этапе S1 способа происходит определение электроникой колеса первого положения угла поворота колеса 22 транспортного средства, соответствующего этому блоку 21 электроники колеса. На непосредственно следующем за ним этапе S2 сначала подготавливается сигнал X1 передачи, который включает в себя это положение угла поворота или зависящее от него показание угла поворота. Кроме того, сигнал X1 передачи может также содержать другие показания, например показания, характерные для колеса, такие как, например, давление в шине или температуру шины. Этот подготовленный таким образом сигнал передачи передается посредством передающего устройства электроники колеса. Переданный таким образом сигнал X1 передачи на транспортном средстве принимается приемным устройством. На этапе S3 происходит определение на транспортном средстве вторых положений угла поворота колес 22 транспортного средства, причем в данном случае определяется не только то положение угла поворота колеса 22 транспортного средства, которое соответствует блоку 21 электроники колеса, передающему сигнал X1 передачи, но и определяются положения угла поворота остальных колес 22 транспортного средства. Благодаря этому получают количество показаний угла поворота, обычно соответствующее количеству колес транспортного средства. На последующем этапе S4 полученные таким образом первые и вторые показания угла поворота корректируются друг относительно друга и предпочтительно сравниваются друг с другом. На заключительном этапе S5 происходит определение местоположения монтажа и вместе с тем локализация колеса 22 транспортного средства, соотнесенного с блоком 21 электроники колеса, в зависимости от проведенного согласования.
Ниже поясняются различные способы согласования показаний угла колеса, определяемых в блоке электроники колеса и на транспортном средстве, для предлагаемой изобретением локализации.
Изобретение основано на том известном факте, что имеющиеся на транспортном средстве колеса транспортного средства в общем случае вращаются с более или менее различной скоростью.
Настоящее изобретение основано также на том, что блок электроники колеса в состоянии определять определенное положение угла поворота этого блока электроники колеса относительно транспортного средства. Это показание используется, когда блок электроники колеса передает сигнал передачи (с соответствующим сообщением) на приемное устройство, находящееся на транспортном средстве. Сообщение сигнала передачи, который необходимо передать, наряду с характерными для колеса показаниями содержит также это положение угла поворота или полученные на его основании показания угла поворота. При этом несущественно и иногда также не предпочтительно, чтобы блок электроники колеса имел сведения также о точном измеренном положении угла поворота. Существенно только, чтобы блок электроники колеса и/или устройство аналитической оценки, находящееся на транспортном средстве, могли определить положение угла поворота, при котором блок электроники колеса передает сигнал передачи на основании измеренного показания угла поворота, например с применением известных значений времени расчета, продолжительности передачи, скоростей транспортного средства и подобного.
Изобретение основано также на том, что на транспортном средстве для каждого колеса транспортного средства предусмотрен датчик частоты вращения, например в качестве составной части системы ESP или ABS. Посредством этого датчика частоты вращения могут определяться сигнальные импульсы частоты вращения и на их основании точные угловые положения колеса относительно транспортного средства.
Идея настоящего изобретения заключается теперь в том, чтобы один блок электроники колеса многократно посылал сигналы передачи. Эти сигналы передачи посылаются этим блоком электроники колеса всегда точно в одном и том же или, по меньшей мере, в некотором точно известном положении угла поворота, которое может определяться блоком электроники колеса или соответственно рассчитываться устройством аналитической оценки путем обратного расчета. Если этот сигнал передачи принимается на транспортном средстве, то в момент времени приема или по меньшей мере в момент времени, полученный на его основании и на основании момента передачи, на транспортном средстве, например посредством датчика частоты вращения, определяются соответствующие положения колес.
Ориентация колес, угловое положение колес
На фиг.3 схематично показан датчик частоты вращения. На фиг.3 с помощью ссылочной позиции 30 изображен опорный диск для измерения частоты вращения и определения угла поворота колеса транспортного средства. Такой диск 30 соотнесен с каждым из колес транспортного средства и, например, неподвижно соединен с осью вращения каждого колеса 11 транспортного средства. Диск 30 включает в себя заданное количество (отдельных друг от друга) сегментов, посредством которых возможно точное определение угла поворота. Современные диски включают в себя, например, 48 сегментов 33, которые отделены друг от друга промежуточной областью. На фиг.3 также показан датчик 31 частоты вращения, который посредством крепления 32 находится в механическом, электрическом или оптическом контакте с диском 30. В креплении 32 может быть также предусмотрено устройство для аналитической оценки электрического сигнала, предоставляемого датчиком 31 частоты вращения. Это устройство аналитической оценки может, например, подсчитывать и аналитически оценивать импульсы, подсчитываемые датчиком 31 частоты вращения, и в зависимости от этого определять текущее положение угла поворота. Разные сегменты 33 на диске 30 могут обнаруживаться посредством датчика 31 частоты вращения. При каждом переходе от одного сегмента на диске 30 к соседнему возникает барьер, так что в случае 48 сегментов одного диска 30 насчитываются всего 96 барьеров на один полный оборот колеса. На фиг.3A и 3B показаны соответственно выходные сигналы датчика частоты вращения для постоянной скорости колеса транспортного средства (фиг.3A) и изменяющейся скорости колеса транспортного средства (фиг.3B). Выходные сигналы в данном случае представляют собой поочередно возникающие прямоугольные импульсы постоянной амплитуды. В случае увеличивающейся скорости прямоугольные импульсы становятся уже, а в случае уменьшающейся скорости прямоугольные импульсы становятся шире.
Датчики частоты вращения, как правило, не имеют определенного нулевого положения, так что не может быть указано абсолютное угловое положение. Поэтому, например, в определенный момент времени, например при включении зажигания транспортного средства и, следовательно, устройства управления, установленного в транспортном средстве, один сегмент 33 или же зубец в датчике 31 частоты вращения может определяться как точка отсчета или нулевая точка. Относительно этого положения угла поворота затем могут рассчитываться следующие углы колеса, основанные на подсчете последовательно проходимых фронтов. После каждого прохождения в указанном примере 96 фронтов (при вращении в одном и том же направлении) снова достигается исходное положение и вместе с тем совершается полный оборот.
При подсчете фронтов необходимо учитывать направление движения колеса (вперед, назад), то есть выполняется ли сложение или соответственно вычитание фронтов из текущего положения. Направление движения может, например, определяться путем аналитической оценки всех четырех сигналов частоты вращения. Дополнительно или альтернативно направление движения может также определяться или идентифицироваться с использованием дополнительных измеренных величин, например ускорения транспортного средства, вращения транспортного средства (в частности, характеристики движения рыскания или продольной качки и прочего). Кроме того, также может аналитически оцениваться сведение о передаче, включенной водителем или автоматической системой движения. Наконец, возможно также применение специальных датчиков частоты вращения колеса нового поколения, которые изначально предоставляют информацию о том, вращается ли колесо транспортного средства вперед или назад. Таким образом, в каждый желаемый момент времени всегда имеется в распоряжении текущая ориентация направления вращения колес транспортного средства.
Возможно также применение именно таких способов согласования, при которых можно обойтись без абсолютного положения вращения (то есть положения угла поворота) колес транспортного средства. При этом ссылаются, например, всегда только на определенное, на основании количества фронтов, пройденное вращение колеса между двумя моментами времени.
Сигналы частоты вращения датчика частоты вращения обычно предоставляются непосредственно в систему торможения или соответственно контроля устойчивости транспортного средства. Непосредственное отведение этих сигналов передачи в другие системы транспортного средства, такие как, например, устройство информации о шинах, чаще всего нежелательно или не разрешено в целях техники безопасности, чтобы таким образом предотвратить искажение этих сигналов. Поэтому сигналы частоты вращения после предварительной обработки системой торможения или соответственно контроля устойчивости могут поступать в шину связи транспортного средства, для того чтобы эти сигналы частоты вращения предоставлялись в распоряжение другим системам.
В случае передаваемых циклически сигналов передачи блока электроники колеса отправляется количество подсчитанных фронтов датчиков частоты вращения, начиная с последних переданных сигналов передачи. Характерное время цикла для передачи соответствующего сигнала передачи составляет примерно от 10 мсек до 20 мсек.
СОГЛАСОВАНИЕ
При согласовании моментов времени передачи принятых сигналов передачи с соответствующими угловыми положениями в течение рассматриваемого периода TX времени аналитической оценки может быть установлена жесткая зависимость между моментами времени передачи процессов радиопередачи всех комбинаций блоков электроники колеса и датчика частоты вращения или скорости вращения, которые относятся к одному и тому же колесу транспортного средства. При этом каждый блок электроники колеса передает в сообщении своего сигнала передачи однозначный кодовый сигнал опознавания, который делает возможным идентификацию каждого из блоков электроники колеса на транспортном средстве.
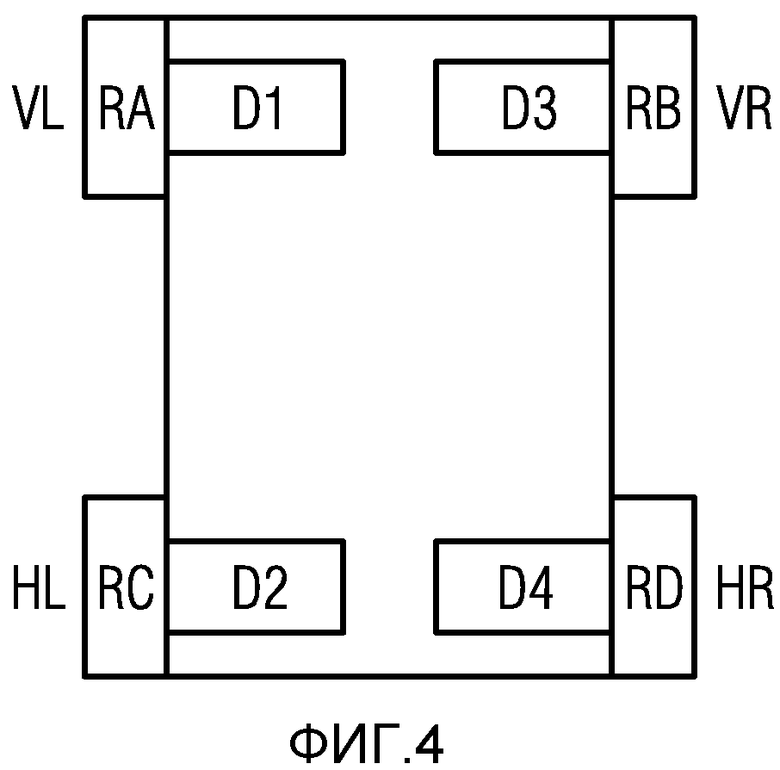
Для изображенной на фиг.4 конфигурации транспортного средства, включающей в себя электроники RA-RD колеса и соответствующие датчики D1-D4 частоты вращения, получается, например, зависимость, приведенная в таблице 1, при этом знаком Х обозначено совпадение, а знаком «---» отсутствие совпадения. Знак Х указывает, что существует жесткая зависимость между моментами времени передачи эмиссий блоком электроники RA-RD колеса и соответственно соотнесенными колесами VL, VR, HL, HR транспортного средства. Под эмиссией в дальнейшем понимается сигнал передачи, переданный блоком электроники колеса.
Блок RA-RD электроники колеса в каждом случае совпадает только с одним единственным колесом VL, VR, HL, HR транспортного средства, соотнесенным с этим блоком RA-RD электроники колеса, так как во время движения все колеса транспортного средства обычно вращаются индивидуально. Так, например, внешнее при повороте колесо транспортного средства должно проходить более длинный путь, чем внутреннее при повороте колесо транспортного средства, и поэтому вращается с более высокой угловой скоростью. Кроме того, приводное колесо транспортного средства чаще всего буксует больше, чем неприводное колесо транспортного средства, так что приводное колесо транспортного средства вращается несколько быстрее. Дополнительно такие различия, как давление воздуха в шине, глубина профиля, размер шины (например обусловленный нежелательными производственными отклонениями) и прочее приводят к различным угловым скоростям колес транспортного средства.
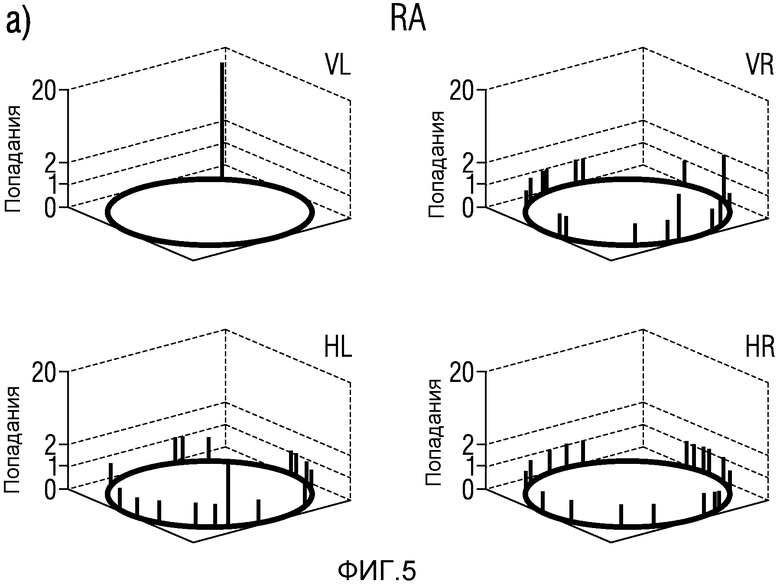
В идеальном случае при аналитической оценке для блока RA-RD электроники колеса транспортного средства получаются зависимости, изображенные на фиг.5A-5D.
В нижеследующем описании рассматривается легковой автомобиль, снабженный в совокупности четырьмя колесами VL, VR, HL, HR транспортного средства, причем для каждого их этих колес VL, VR, HL, HR транспортного средства предусмотрен соответственно один блок RA-RD электроники колеса и один датчик D1-D4 частоты вращения. Приемное устройство, предусмотренное для соответствующего блока RA-RD электроники колеса, принимает при этом соответственно эмиссии, то есть сигналы передачи, передаваемые разными блоками RA-RD электроники колеса.
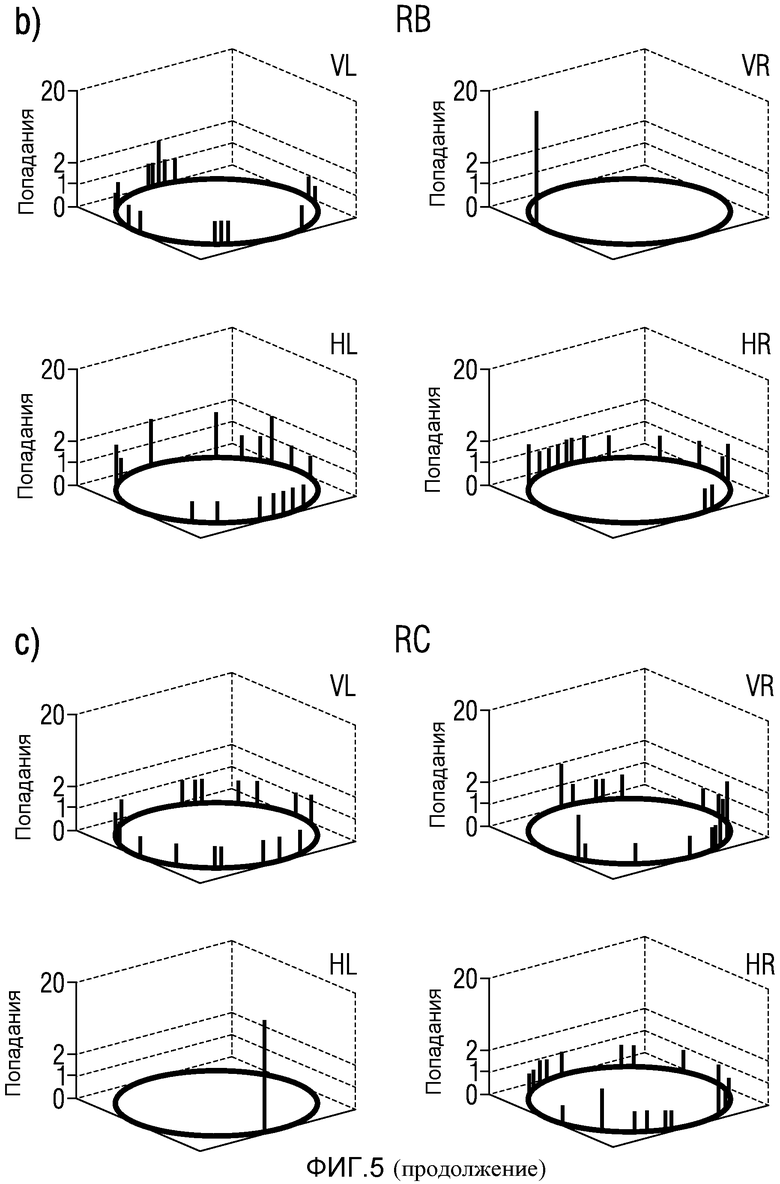
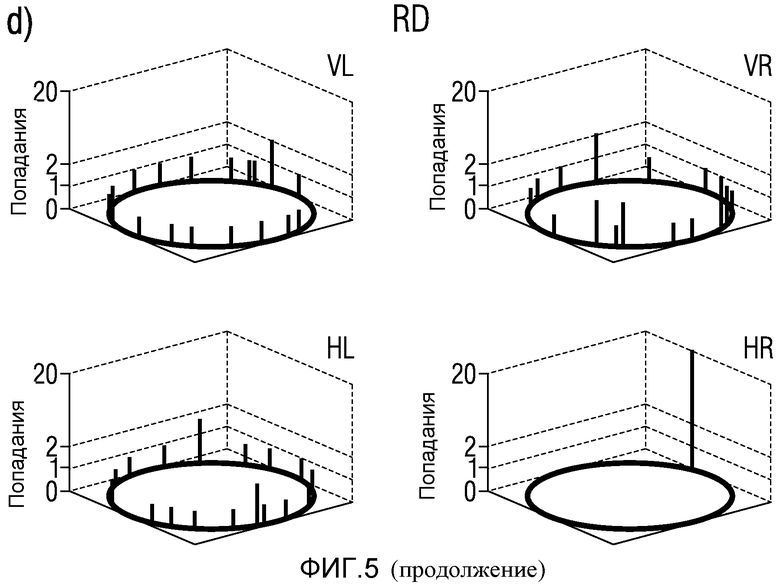
Для лучшего понимания четыре эмиссии, соответствующие разным блокам RA-RD электроники колеса, изображены на четырех фиг.5A-5D, причем соответственно ссылочной позицией RA-RD обозначены все четыре блока электроники колеса. Каждая из этих фиг.5A-5D, кроме того, включает в себя четыре отдельных фигуры, на которых показано в случае эмиссии соответствующего блока RA-RD электроники колеса соответствующее распределение угловых положений колеса как количество попаданий для каждого местоположения монтажа, при этом ссылочными позициями VL, VR, HL, HR обозначены местоположения монтажа соответствующих блоков RA-RD электроники колеса транспортного средства спереди слева, спереди справа, сзади слева или соответственно сзади справа. Это распределение показывает в данном случае отдельно для каждого местоположения монтажа VL, VR, HL, HR число попаданий, то есть количество попаданий на одно угловое положение колеса, которое было измерено при приеме эмиссии датчиком угла поворота.
На изображениях, показанных на фиг.5A-5D, полученные таким образом угловые положения колеса представлены в виде трехмерного распределения (так называемой гистограммы), на которой черные окружности соответственно изображают угловые положения колеса от 0° до 360°, а пики или отклонения, которые выступают из этих черных окружностей, соответственно попадания для этого углового положения колеса. В плоскости ординат представлены количество соответствующих попаданий для эмиссии при одном конкретном угловом положении колеса.
На фиг.5A-5D соответственно показаны 20 эмиссий и вместе с тем 20 моментов времени передачи (моментов времени эмиссии), нанесенные в соответствующих положениях вращения четырех колес транспортного средства, составляющих 0-360°. Для каждого блока RA-RD электроники колеса существует соответственно одно местоположение монтажа колеса VL, VR, HL, HR транспортного средства, при котором все определенные положения колеса для этого момента времени эмиссии совпадают. У других трех колес VL, VR, HL, HR транспортного средства не находится ни одного или практически ни одного совпадения. Кроме того, показано, что абсолютное указание положения угла колеса не является обязательно необходимым для однозначного определения соотнесения.
Изображения, показанные на фиг.5A-5D, могут интерпретироваться так, что надлежащее колесо VL, VR, HL, HR транспортного средства с соответствующими друг другу эмиссиями при эмиссии относительно углового положения колеса транспортного средства всегда ориентировано одинаково, или что между двумя следующими друг за другом эмиссиями всегда совершается целое количество оборотов колеса.
В реальности такого рода точные совпадения скорее невероятны. Это обусловлено, например, значениями времени обработки в устройстве управления, времени задержки при приеме и дальнейшей обработке сигналов передачи, неопределенностями при распознавании углового положения в блоке электроники колеса, шумами и прочим. Соответственно получится скорее изображение 3-мерной гистограммы, соответствующее фиг.6A, причем в данном случае показана только зависимость разных эмиссий для блока RA-RD электроники колеса. На фиг.6B показано другое изображение в виде гистограммы, которое отображает распределение эмиссий по положениям колеса несколько иным образом. В принципе, колесо транспортного средства разрезается от 0° до 360° и наносится на прямую линию. Это изображение будет использоваться в дальнейшем.
На фиг.6B показано, что значения угла колеса в случае надлежащего колеса транспортного средства, то есть у колеса транспортного средства с совпадающим угловым положением колеса, точно совпадают не при каждой операции радиопередачи. Напротив, получается статистическое скопление в угловом диапазоне, который обычно имеет отчетливо различимое среднее значение и определенную дисперсию. Однако как и прежде можно различить отчетливую зависимость между блоком RA электроники колеса и соответствующим передним колесом VL транспортного средства. Посредством изложенных ниже способов аналитической оценки эти зависимости блоков RA-RD электроники колеса от относящихся к ним колес VL, VR, HL, HR определяются на абстрактной основе.
Способ аналитической оценки: определение целочисленного количества оборотов, интерполяция сигналов частоты вращения колеса шиной связи
В принципе, можно применять различные концепции аналитической оценки зависимостей между эмиссиями блоков электроники колеса и ориентацией колес в устройстве управления устройства информации о шинах. Ниже описываются различные подходы, которые предпочтительно также комбинируются друг с другом.
1. Скопление/концентрация эмиссий блока электроники колеса при определенной ориентации колеса
На фиг.6B показано, что эмиссии всегда возникают в одном угловом положении колеса и вместе с тем в один момент времени, когда переднее левое колесо VL транспортного средства принимает угол ориентации, равный примерно 45°. По сравнению с этим у других колес VR, HL, HR транспортного средства такая зависимость эмиссий не наблюдается.
Имеющиеся скопления, которые, таким образом, позволяют сделать заключение о совпадении эмиссий с колесом транспортного средства, в данном первом подходе квантифицируются численно. Для этого может быть, например, рассчитана статическая дисперсия попаданий по отношению к определенному угловому положению колеса. Очевидно, что разброс попаданий на диаграмме на фиг.6B относительно положения вращения для переднего левого колеса VL транспортного средства намного меньше, чем разброс распределения прочих колес VR, HL, HR транспортного средства.
Альтернативно можно также проводить аналитическую оценку максимума (максимального количества попаданий в одном угловом положении колеса) на этих четырех разных гистограммах. Так, например, на фиг.6B в случае совпадающего колеса VL транспортного средства показано значение 5, то есть 5 эмиссий были приняты при одном и том же угловом положении колеса, в то время как в случае других колес VR, HL, HR транспортного средства имеются только значения, равные 1 или максимум 2.
Так как при этом, однако, речь идет снова о неидеальных «зашумленных» значениях измерений, целесообразно аналитически оценивать не только отдельное значение соответствующего максимума, но и выполнять аналитическую оценку находящихся рядом друг с другом значений в области этого максимума. В зависимости от количества этих значений измерений получается более или менее однозначное показание, при этом определенность может повышаться в зависимости от того, чем больше результатов измерений и вместе с тем эмиссий одновременно используется. Предпочтительной, конечно, является комбинация двух вышеназванных методов, то есть аналитическая оценка дисперсии распределения в комбинации с аналитической оценкой максимумов.
2. Совпадение интервалов времени между двумя эмиссиями блока электроники колеса с целым количеством оборотов колеса
Переднее левое колесо VL транспортного средства между двумя эмиссиями блока RA электроники колеса чаще всего совершает некоторое приблизительно целое количество оборотов. Совершает ли колесо транспортного средства целочисленное количество оборотов, можно надежно определять посредством так называемой операции деления по модулю. Для этого может использоваться количество фронтов датчика частоты вращения колеса, начиная с последней эмиссии, например 960 фронтов на 10 оборотов при 96 фронтов на один оборот. Если остаток от деления по модулю на это количество для одного полного оборота дает ноль, соответствующее колесо транспортного средства совершило целое количество оборотов.
На практике, напротив, оказывается, что эмиссии блока электроники колеса, например вследствие неточности при распознавании положения, синхронизации обработки сигнала только в определенные интервалы времени в блоке электронике колеса и подобного, осуществляются не точно в одном и том же месте, так что соответствующее колесо транспортного средства не всегда совершает точно один оборот. На практике всегда будут происходить небольшие отклонения от одного полного оборота, например при 962 фронтах остаток от деления по модулю в данном случае равен 2, в частности, при наличии большего периода времени наблюдения и вместе с тем большого количества оборотов.
Кроме того, до сих пор общеизвестные подходы касаются сравнения отдельных интервалов между двумя следующими друг за другом эмиссиями блоков электроники колеса. Если в следующие друг за другом моменты T1 и T2 времени в распоряжении находятся, например, только две эмиссии блоков электроники колеса, и тем самым после изменений углов четырех колес (VL, VR, HL, HR) транспортного средства происходит поиск целочисленных количеств оборотов, то точность распознавания будет ограниченной, в частности, если разница в повороте колес транспортного средства за эти периоды времени была лишь небольшой. Тот же результат получается и в случае других измерений в моменты T3, T4, T5, T6 времени.
В предлагаемом изобретением способе используется так называемый кумулятивный способ, который сильно улучшает динамику распознавания положения. Этот кумулятивный способ предусматривает оценку всех возможных комбинаций, то есть не только T1-T2, T2-T3, T3-T4 и подобного. При этом в случае эмиссий/измерений в моменты T1, T2, T3, T4, T5, T6 времени оцениваются следующие комбинации:
T1-T2,
T1-T3,
T1-T4,
T1-T5,
T1-T6,
T2-T3,
T2-T4,
T2-T5,
T2-T6,
T3-T4,
T3-T5,
T3-T6,
T4-T5,
T4-T6,
T5-T6.
При этом в общем случае при n различных измерений T1-Tn получаются всего n×(n-1)/2 комбинаций, которые можно исследовать. Очевидно, что преимущество по сравнению с вышеназванным простым способом становится тем больше, чем больше имеется измеренных значений n. Это преимущество основано на том, что не столько оценивают отношение между двумя событиями, сколько рассматривают всю зависимость между предпочтительно всеми или, по меньшей мере, некоторым большим количеством эмиссий.
Выше уже пояснялось, как угловое положение колеса или соответственно ориентация колес транспортного средства в произвольный момент времени может быть реконструирована на основании импульсов частот вращения колеса. При этом возникает затруднение, если импульсы в сообщении по шине связи предоставляются в распоряжение другим устройством управления. Эти сообщения, как правило, передаются не точно в те моменты времени радиопередачи, в которые, однако, необходима эта информация. В этом случае угловые положения колеса в желаемый момент времени реконструируются таким образом, что в рамках приема сообщений в шине связи могут применяться способы интерполяции. В данном случае время цикла, составляющее приблизительно от 5 мс до 100 мс, является достаточно точным.
Ниже описывается пример для пояснения двух описанных выше способов аналитической оценки с помощью таблицы 2 на фиг.7:
в таблице 2 на фиг.7 для 20 эмиссий одного блока электроники колеса показаны имеющиеся в эти моменты времени T1-T20 состояния счетчика для подсчитанных фронтов и соответствующие угловые положения для двух различных колес. В каждый момент времени T1-T20 определяется текущая ориентация у двух колес. В таблице 2 не приводятся показания для других колес транспортного средства. Угловая ориентация колес транспортного средства определяется на основе проходящих импульсов частоты вращения колес. Количество импульсов/количество фронтов при включении устройства управления было, например, поставлено обратно на нуль и затем непрерывно продолжало подсчитываться. В примере, показанном на фиг.7-7B, движение происходило строго вперед, так что количество импульсов с возрастанием момента времени передачи сообщения увеличивается строго монотонно. Положения ориентации колес получают путем деления по модулю на количество импульсов на один оборот (360°=1 оборот) и последующим согласованием этих импульсов с соответствующим показанием в градусах.
На фиг.7 показано, что первое колесо F1 транспортного средства всегда принимает ориентацию, равную приблизительно. 240°, когда блок электроники колеса эмитирует сигналы передачи. У другого колеса F2 транспортного средства такая зависимость не наблюдается. Эти зависимости изображены на фиг.7A, 7B в виде гистограммы. Показано, что у колеса F1 транспортного средства положения ориентации очень сильно сконцентрированы в одном положении, при этом у колеса F2 транспортного средства никакой закономерности не наблюдается. Это соответствует изложенному выше первому способу аналитической оценки.
Ниже с помощью фиг.8-8B описывается вышеупомянутый второй способ аналитической оценки. В этом способе оцениваются различия между каждыми двумя моментами времени передачи. При 20 моментах T1-T20 времени передачи получают, таким образом, 20×19/2=190 комбинаций. В изображенной на фиг.8 таблице 3 с одной стороны отображены подсчитанные импульсы/фронты между соответствующими моментами времени передачи и рассчитанное на их основании количество оборотов колеса. Дополнительно отображена разность в градусах оборотов колеса относительно полного оборота колеса.
Следует заметить, что разность по отношению к целому количеству оборотов колеса указана как абсолютный угол. Альтернативно можно, конечно, также оценивать относительное отклонение относительно количества оборотов колеса.
В таблице 3 на фиг.8 показано, что у первого колеса F1 транспортного средства между двумя эмиссиями имеется достаточно точное целое количество оборотов, в то время как у колеса F2 транспортного средства это не так. Это также отображено с помощью двух гистограмм на фиг.8A для первого колеса F1 транспортного средства и на фиг.8B для второго колеса F2 транспортного средства. В данном случае показаны отклонения соответственно относительно целого оборота колеса. На этих диаграммах показано, что для определения совпадения и вместе с тем для согласования могут применяться математические методы описанного выше первого способа аналитической оценки.
Резюмируя, можно констатировать, что вышеупомянутый первый способ ориентируется на текущие, то есть абсолютные положения ориентации колес транспортного средства в соответствующие моменты времени передачи, а второй способ основывается на относительных удлинениях между двумя эмиссиями, то есть на относительной ориентации. Хотя оба способа не являются совершенно независимыми друг от друга, однако комбинация двух способов при аналитической оценке приводит к еще лучшему результату определения положения.
ОПТИМИЗАЦИЯ ПРЕДЛОЖЕННЫХ СПОСОБОВ
В описанном выше первом способе происходит поиск скоплений/концентраций внутри распределений, то есть гистограмм. Для этого могут применяться общеизвестные статистические методы, такие как, например, определение дисперсии или стандартного отклонения. В данном случае следует, однако, отметить, что угол оборота, равный 359°, находится также вблизи угла, равного 1°, или соответственно угол 360° даже соответствует углу 0°. Если скопления углов вращения наблюдаются, например как изображено на фиг.9B, в этих краевых угловых областях, то аналитическая оценка с помощью известных статистических методов была бы затруднена. Для решения данной задачи вышеназванные традиционные статистические методы подвергаются усовершенствованиям. Для этого описанный выше метод, например, модифицируется таким образом, что «смещенное» распределение смещают на определенное расстояние «по кругу» вдоль вращения колеса за пределы этого диапазона значений или же применяют зеркальные отображения. В принципе, необходимо только один раз обнаружить, что имеется такое распределение за пределы этого диапазона значений. Это показано на фиг.9A и 9B. В изображении на фиг.9A показано то же самое, что и на фиг.9B, однако смещенное распределение, но только распределение на фиг.9A по сравнению с первоначальным распределением на фиг.9B смещено на абсолютную величину, равную приблизительно 180°.
Проблематично также, что на практике постоянно присутствуют выпадающие значения в распределении угловых положений колеса. Эти выпадающие значения могут быть вызваны, например, неправильными определениями положения вращения внутри блока электроники колеса или же проблемами расчета внутри устройства управления, например задержками времени переданных и принятых сигналов передачи. Особенно часто этого результата можно ожидать, когда электроника колеса вынужденно передает сильно зашумленные сигналы передачи, обусловленные, например, неровностями дорожного полотна и тому подобным, в неправильном положении передачи и вместе с тем неправильном положении угла поворота. В определенной степени всегда можно ожидать небольшой погрешности распределения, как это уже было показано в предыдущих гистограммах, прежде всего при необходимости аналитической оценки множества операций передачи. С этими разбросами описанные выше способы, как правило, также хорошо справляются.
Проблемы создают, скорее, единичные выпадающие значения, как показано в гистограмме на фиг.10B, на которой выпадающие значения имеются примерно при 60° и 80°. Если применяются названные статистические способы, такие как, например, расчет дисперсии, то для примера, показанного на фиг.10B, оценка концентрации около среднего значения примерно при 160° окажется существенно хуже. С одной стороны, среднее значение распределения за счет двух этих выпадающих значений при 60° и 80° будет нежелательным образом сдвигаться влево. С другой стороны, разброс будет увеличен. По этой причине при оптимизации способа исключается влияние выпадающих значений, при этом, например, перед статистической оценкой выполняется предварительная обработка, при которой обнаруживаются единичные выпадающие значения, на фиг.10B - при 60° и 80°, и исключаются из статистической оценки. На фиг.10A показано распределение, скорректированное таким образом. Этот метод обнаружения выпадающих значений может применяться как при первом, так и при втором способе аналитической оценки.
ПРЕРЫВАНИЯ СИГНАЛА ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕСА
Для описанных выше способов предпочтительно, чтобы имеющемуся на транспортном средстве устройству управления системы информации о шинах непрерывно предоставлялись в распоряжение правильные показания частоты вращения, так чтобы могли правильно реконструироваться положения ориентации колес. Впрочем, на практике существуют также ситуации, при которых это не выполняется. С одной стороны, возможны выходы из строя внутренней шины связи, в связи с чем такие показания частоты вращения могут быть утеряны. С другой стороны, возможно, что устройство управления исходит из того, что колесо транспортного средства вращается вперед, так как, например, включена передняя передача, но транспортное средство движется назад, например, на склоне. Кроме того, возможно также, что транспортное средство катилось, однако информация о направлении при этом отсутствует. Во всех названных случаях это приводит к тому, что рассчитывается неправильная ориентация колеса для последующих моментов времени передачи. Из-за этого аналитическая оценка может выполняться некорректно, так как, например, может получиться несколько скоплений распределения в получающихся при этом гистограммах для колеса транспортного средства.
При этом возможно применение способов аналитической оценки, позволяющих распознавать несколько скоплений, что, однако, является сравнительно трудоемким.
Альтернативно было бы также возможно и предпочтительно во время первого способа аналитической оценки применять обработку всегда к тем интервалам времени, в которые можно было бы определять взаимозависимые и к тому же корректные положения ориентации колес. Для окончательного распределения положений передачи затем необходимо совместное рассмотрение отдельных интервалов времени. Во время второго способа аналитической оценки этот процесс даже несколько проще. В данном случае поиск целочисленных количеств оборотов между двумя моментами времени передачи всегда происходит только между двумя моментами времени, которые берутся из одного и того же интервала времени с взаимозависимыми корректными ориентациями колес. Отдельное рассмотрение в конце больше не требуется, так как в данном случае речь идет уже только об относительном рассмотрении ориентации колеса вместо абсолютного рассмотрения ориентации колеса.
Прерывания в корректном определении ориентации колеса могут быть установлены различным образом.
Потеря сообщения в шине связи может, например, обнаруживаться на основании дискретности в циклической обработке. Движение транспортного средства без информации о направлении распознается по тому, что наблюдаются фронты в показаниях частоты вращения, но информация о направлении в данный момент отсутствует. Движение в неправильном направлении может распознаваться, например, путем идентификации с помощью других сигналов транспортного средства, таких как, например, ускорение транспортного средства, вращение и пр. В принципе, это происходит только тогда, когда скорость транспортного средства очень мала или периодически близка к нулю, так как только тогда возможна перемена между передней передачей и задней передачей.
ПРИСВАИВАНИЕ ПОЛОЖЕНИЯ ШИНЫ/КРИТЕРИИ СХОДИМОСТИ
Оценка скоплений эмиссий в отношении угла колеса является основой для локализации блоков электроники колеса. Для определения местоположений монтажа на транспортном средстве, однако, необходим еще один дополнительный этап, который определяет соотнесения корректных местоположений монтажа с блоками электроники колеса и вместе с тем с соответствующими колесами транспортного средства. Это присваивание может происходить на основе различных критериев, которые могут также комбинироваться друг с другом.
КРИТЕРИЙ ЗНАЧИМОСТИ
Для каждого блока электроники колеса выполняется оценка принадлежности к колесу транспортного средства. При этом определятся численная мера принадлежности блока электроники колеса каждому колесу транспортного средства, например, с помощью уже описанных выше способов аналитической оценки. В зависимости от совпадения эмиссий с угловыми положениями колес получается более или менее однозначная картина. Кроме того, рассчитывается мера значимости на один блок электроники колеса, которая оценивает отношение совпадений, в частности, насколько значимой является принадлежность к наиболее вероятному колесу транспортного средства. Если эта мера превышает заданный порог, возможно однозначное или, по меньшей мере, отвечающее критериям значимости вероятное соотнесение.
ПРОТИВОРЕЧИЯ ПРИ СООТНЕСЕНИИ
В принципе, возможны случаи, когда на основании способов аналитической оценки и полученного с их помощью результата два различных блока электроники колеса как будто принадлежат к одному и тому же колесу транспортного средства. Такие противоречия при соотнесении должны распознаваться. В этих случаях соотнесение блоков электроники колеса с соответствующими местоположениями монтажа сначала прекращается или приостанавливается. Затем соотнесение осуществляется предпочтительно на основе непосредственного сравнения мер значимости всех блоков электроники колеса и колес транспортного средства.
КОЛИЧЕСТВО ОБРАБОТАННЫХ РАДИОЭМИССИЙ
Чем больше обрабатывается принятых эмиссий, тем надежнее становится соотнесение в целом. Поэтому предпочтительно задавать минимальное количество эмиссий, которое, по меньшей мере, должно иметься в наличии и аналитически оцениваться перед соотнесением. Предпочтительно при этом задавать минимальное количество принятых эмиссий на один блок электроники колеса, например, по меньшей мере, 5, и более предпочтительно, по меньшей мере, 10, и еще более предпочтительно, по меньшей мере, 20.
ПРЕЖДЕВРЕМЕННОЕ ПРИСВАИВАНИЕ
Если для трех блоков электроники колеса уже возможно соотнесение местоположения их монтажа с очень высокой надежностью, то в случае четырех блоков электроники колеса или соответственно колес транспортного средства можно воздержаться от выполнения аналитической оценки для оставшегося четвертого блока электроники колеса и вместе с тем еще не соотнесенного четвертого местоположения монтажа. Таким образом, процедура локализации может быть закончена. Аналогично этому, если уже возможно соотнесение для колес транспортного средства одной оси, то в данном случае также можно выполнять это соотнесение. Это является предпочтительным, когда, например, необходимо соотнесение только на одной оси, обусловленное необходимостью контроля различных давлений на ось. В этом случае уже - независимо от показаний о стороне транспортного средства - возможен контроль, например, давления воздуха в шинах.
Возможны многообразные комбинации описанных выше пунктов, например включающие в себя альтернативу, выраженную союзами «И и/или ИЛИ». Кроме того, реализуемы также особые случаи: если, например, соотнесение может быть определено на основе однозначных мер значимости, то можно отказаться от требования минимального количества эмиссий.
С одной стороны, локализация должна заканчиваться как можно быстрее. С другой стороны, колеса транспортного средства на транспортном средстве при движении в большинстве дорожных ситуаций совершают только медленное вращение друг относительно друга. Соответственно требуется достаточно долгое время, прежде чем можно отметить однозначные различия при способах согласования и обеспечить возможность надежного соотнесения. Как правило, поэтому является целесообразным и желательным компромисс между быстрой локализацией, с одной стороны, и надежной локализацией, с другой стороны.
Момент времени передачи: момент времени отправки и момент времени приема переданного или соответственно принятого сообщения
Со стороны блока электроники колеса (передающей стороны) выполняются следующие этапы:
1. Ожидание момента времени передачи эмиссии (передачи полного сообщения) блока электроники колеса. Но так как блок электроники колеса обычно осуществляет передачу не непрерывно, и часто также задан минимальный интервал между двумя эмиссиями, то блок электроники колеса должен соответственно ожидать в течение интервала времени для осуществления эмиссии, например, каждые 15 с.
2. Обнаружение заданной ориентации или соответственно углового положения колеса транспортного средства, при котором должна осуществляться передача. Альтернативно может также распознаваться текущая ориентация колеса транспортного средства, причем тогда эта информация передается с сообщением сигнала передачи.
3. Составление сообщения сигнала передачи; подготовка радиопередачи.
4. Начало передачи сигнала передачи (эмиссии), который включает в себя полное сообщение.
5. Конец передачи посылаемого сигнала. Полное сообщение передано.
6. Возврат к этапу 1 способа.
Со стороны находящегося на транспортном средстве приемного устройства (приемная сторона) выполняются следующие этапы:
a. Ожидание сигнала передачи с полным сообщением.
b. Обнаружение начала радиопередачи.
c. Обнаружение конца радиопередачи.
d. Вероятно, передача метки времени с информацией о моменте времени радиопередачи.
e. Возврат к a.
Момент b. времени на приемной стороне соответствует моменту 4. времени на передающей стороне. Так как важно, чтобы блок аналитической оценки, находящийся на транспортном средстве, то есть на приемной стороне, знал, когда блок электроники колеса, находящийся на передающей стороне, выполнил определение ориентации колеса, то фактически происходит поиск момента 2. времени. Это чаще всего оказывается трудным. Поэтому приемник, как правило, скорее будет определять момент c. времени, то есть тот момент времени, в который сообщение принималось безошибочно. Определение момента b. времени, в принципе, также возможно, однако не обязательно целесообразно, когда во время приема переданного и принятого сигнала передачи иногда возникают обрывы радиопередачи. От момента c. времени, как правило, однако без затруднений можно сделать обратный расчет к моменту b. времени, так как обычно известно, как долго в общем случае продолжается радиопередача. Это знание основано на объеме данных, содержащемся в полном протоколе передачи, для передачи которых передающему устройству блока электроники колеса требуется некоторый известный отрезок времени. В данном случае необходимо сделать только обратный расчет от момента 4. времени к моменту 2. времени. Это возможно, если определить время задержки путем анализа режима работы блока электроники колеса. Следовательно, в устройстве управления можно осуществить обратный расчет к моменту 2. времени и определить для него четыре положения ориентации колес или соответственно угловых положения колес, определенных с помощью электроники колеса.
Дополнительная задержка может возникнуть, если сообщение передается от внешнего приемного блока вне устройства управления по шине связи на устройство аналитической оценки/устройство управления. В данном случае вместе с сообщением может передаваться метка времени радиопередачи. Альтернативно можно было бы также соблюдать для сообщения известную постоянную задержку, которая необходима для передачи по шине связи. Тогда данная задержка может быть вновь вычислена в устройстве управления.
В общем, конечно, желательно также по возможности сократить все имеющиеся задержки, чтобы перерабатывать все показания как можно более своевременно и без искажений.
В режиме работы блока электроники колеса целесообразно расширение описанного выше технологического процесса. На практике иногда невозможно определить ориентацию колеса, когда, например, имеются сильно зашумленные сигналы. Это происходит, например, тогда, когда на дороге, по которой движется транспортное средство, имеются сильные неровности. Если невозможно определить ориентацию или же при распознавании происходит превышение времени, то это должно фиксироваться в блоке электроники колеса. В этом случае, как правило, все еще посылается радиосообщение, чтобы передать устройству управления для контроля текущие показания о шинах, такие как, например, давление воздуха в шинах. Тогда в данном случае необходимо, чтобы блок электроники колеса передавал в этом сообщении указание, что эмиссия не связана с ориентацией. Таким образом, в устройстве управления обрабатывается только переданная информация, но не осуществляется аналитическая оценка момента времени радиопередачи для локализации.
При определении момента 2. времени существуют и другие факторы, которые могут играть роль и поэтому должны учитываться. Эти факторы коротко поясняются в нижеследующем описании.
Известно, что во время передачи датчиками шин существуют так называемые «Black Spots» (черные пятна). Это угловые положения колеса, в которых прием сообщения находящимся на транспортном средстве приемником затруднен или соответственно совсем не возможен. Это можно объяснить тем, что радиолиния, например, нарушается частями кузова. Поэтому целесообразно не всегда осуществлять эмиссию в одних и тех же положениях, а устанавливать при этом произвольную задержку и вместе с тем смещенный угол колес перед непосредственной радиопередачей, так чтобы достигалось как можно более равномерное распределение эмиссий по всей окружности колеса, равной 360°. Тогда при эмиссии блока электроники колеса важно, чтобы в сообщении содержалась информация о соответствующей произвольной задержке. Тогда эта задержка может быть заново рассчитана в устройстве управления, чтобы получить первоначальный момент времени распознавания положения внутри блока электроники колеса. Кроме того, на практике часто возможен некорректный прием отдельных передач, например, из-за одновременных радиопомех или гашения эмиссиями других блоков электроники колеса. По этой причине предпочтительно отправлять показания электроники колеса избыточным образом. При этом передаются отдельные фреймы или соответственно эмиссии, которые содержат идентичные показания.
На практике передают не каждый фрейм для заданной ориентации колеса, а определяют предварительно заданную ориентацию для первого фрейма и затем досылаются другие фреймы по заданному образцу. Поэтому в рамках передачи блоков электроники колеса, связанной с положением, необходимо также, чтобы на основании приема только одного или двух фреймов одного пакета данных (Burst) можно было также осуществлять обратный расчет первоначального обнаружения ориентации. Для этого необходимо, чтобы каждый фрейм содержал информацию, о каком по счету фрейме внутри пакета данных идет речь. На основании этих данных и сведениях о длительности пауз между фреймами устройство управления может последовательно осуществлять обратный расчет первоначального момента времени обнаружения.
Следует еще раз указать на то, что не обязательно необходимо распознавать определенную ориентацию в блоке электроники колеса и эмитировать это. Альтернативно можно также распознавать произвольную ориентацию, эмитировать в ней и передавать соответствующее показание ориентации с переданным сигналом передачи. В устройстве управления на основании этих показаний можно также осуществлять повторный поиск совпадения моментов времени передачи с угловыми положениями колеса. Для этого могут быть использованы описанные способы. В принципе, однако, проще распознавать заданную ориентацию, чем непрерывно определять ориентацию.
Хотя настоящее изобретение было описано выше на предпочтительных примерах осуществления, оно не ограничено ими, а может модифицироваться разнообразным образом.
Настоящее изобретение не обязательно ограничивается применяемым в легковом автомобиле устройством информации о шинах. Напротив, это изобретение может применяться в любых транспортных средствах, таких как грузовики, автобусы, мотоциклы, бесприводные прицепы и прочее. В частности, изобретение не ограничивается также описанными количествами колес транспортного средства на транспортном средстве, и возможна также локализация больше или меньше чем 4 блоков электроники колеса. Вместо локализации колеса возможна и предпочтительна также локализация оси.
Следует указать, что изобретение также относится к локализации шин как таковых, то есть пункты формулы изобретения должны также пониматься как «устройства и способы локализации, по меньшей мере, одной шины на транспортном средстве». Термин «колесо транспортного средства» следовало бы тогда в остальной части заявки заменить понятием «шины».
Прежде всего, изобретение не ограничено тем, посредством которого блок электроники шины определяет положение колеса, при котором должна осуществляться эмиссия. Это может осуществляться любым образом, как, например, с помощью аналитической оценки показания гравитации, которое определяется посредством датчика гравитации, показания ускорения, его производной и прочего.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 Транспортное средство
11 Колеса транспортного средства
12 Блок электроники колеса
13 Устройство передачи/приема
14 Устройство управления устройства информации о шинах
15 Программно-управляемое устройство, микроконтроллер
16 Запоминающее устройство
17 Система оповещения водителя
20 Устройство
21 Блок электроники колеса
22 Колесо транспортного средства
23 Приемное устройство
24 Устройство аналитической оценки
25 Система контроля устойчивости
30 Диск
31 Датчик частоты вращения
32 Крепление
33 Сегменты на диске
RA-RD Блоки электроники колеса
D1-D4 Датчики частоты вращения
S1-S5 Этапы
T1-T20 Моменты времени передачи
VL, VR Местоположение монтажа/колеса транспортного средства: переднее левое или соответственно правое
HL, HR Местоположение монтажа/колеса транспортного средства: заднее левое или соответственно правое
F1, F2 Колеса транспортного средства
X1, X2 Сигналы передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ СЕНСОРОВ КОЛЕСНОЙ ОДОМЕТРИИ | 2023 |
|
RU2821391C1 |
| Способ комплексирования разнородной навигационной информации для позиционирования наземного транспортного средства | 2021 |
|
RU2769440C1 |
| Способ позиционирования наземного транспортного средства | 2021 |
|
RU2769918C1 |
| КОЛЕСНАЯ ЭЛЕКТРОНИКА, КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2533850C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2524805C2 |
| ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2631401C2 |
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1991 |
|
RU2026448C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754021C1 |
Группа изобретений относится к способу локализации местоположений монтажа колес транспортного средства в автомобиле. По меньшей мере, одно колесо транспортного средства снабжено блоком электроники колеса, включающего в себя следующие этапы: определение посредством блока электроники колеса первого положения угла поворота колеса транспортного средства, соответствующего этой электроники колеса; передача сигнала передачи с первым показанием угла поворота, зависящим от определенного первого положения угла поворота; определение на транспортном средстве второго положения угла поворота колес транспортного средства и в зависимости от этого предоставление второго показания угла поворота; согласование первого показания угла поворота со вторыми показаниями угла поворота; определение местоположения колеса транспортного средства, соответствующего этому блоку электроники колеса, в зависимости от этого согласования. Раскрыто также устройство для осуществления этого способа. Технический результат - повышение надежности локализации колес транспортного средства. 3 н. и 12 з.п. ф-лы, 10 ил.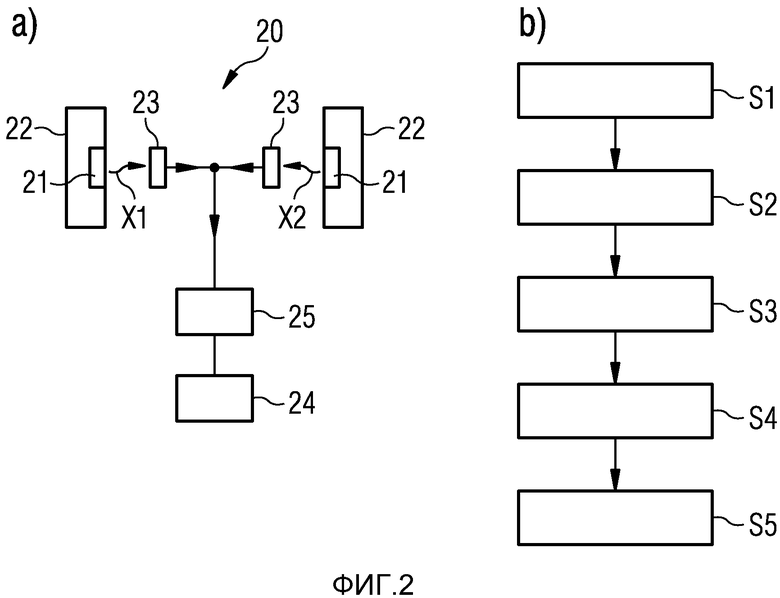
1. Способ локализации местоположений (VL, VR, HL, HR) монтажа колес (11, 22) транспортного средства в автомобиле (10), при котором, по меньшей мере, одно колесо транспортного средства снабжено блоком электроники (12, 21) колеса, включающий в себя следующие этапы:
- определение (S1) посредством блока электроники колеса первого положения угла поворота колеса (11, 22) транспортного средства, соответствующего этому блоку (12, 21) электроники колеса;
- передача (S2) сигнала (X1) передачи с первым показанием угла поворота, зависящим от определенного первого положения угла поворота;
- определение (S3) на транспортном средстве второго положения угла поворота колес (11, 22) транспортного средства, и в зависимости от этого предоставление вторых показаний угла поворота;
- согласование (S4) первого показания угла поворота со вторыми показаниями угла поворота;
- определение (S5) местоположения (VL, VR, HL, HR) монтажа колеса (11, 22) транспортного средства, соответствующего этому блоку (12, 21) электроники колеса, в зависимости от указанного согласования.
2. Способ по п.1, отличающийся тем, что несколько передаваемых блоком (12, 21) электроники колес сигналов (X1) передачи, содержащих несколько первых показаний угла поворота, соответствующих количеству посылаемых сигналов (X1), передают в различные моменты времени и согласовывают с соответствующим количеством соответственно вторых показаний угла поворота.
3. Способ по п.2, отличающийся тем, что, по меньшей мере, 2, предпочтительно, по меньшей мере, 6 и, в частности, еще более предпочтительно, по меньшей мере, 20 переданных сигналов передачи используются для определения местоположения (VL, VR, HL, HR) монтажа.
4. Способ по одному из пп.2 или 3, отличающийся тем, что посредством блока электроники колеса передают разные сигналы (X1) передачи соответственно в известном, жестко заданном положении угла поворота этого блока (12, 21) электроники колеса, причем на транспортном средстве для каждого принятого сигнала передачи в момент времени приема этого сигнала (X1) передачи определяют вторые положения угла поворота, на основании которых получают вторые показания угла поворота.
5. Способ по п.4, отличающийся тем, что для каждого колеса (11, 22) транспортного средства устанавливают распределение вторых показаний угла поворота, причем это распределение включает в себя вторые положения угла поворота, полученные на основании вторых показаний угла поворота, причем для определения местоположения (VL, VR, HL, HR) монтажа осуществляется аналитическая оценка максимальных значений и/или дисперсий распределения.
6. Способ по п.5, отличающийся тем, что то распределение, которое имеет наибольшие максимальные значения или соответственно наименьшие дисперсии, определяется как местоположение (VL, VR HL HR) монтажа колеса (11, 22) транспортного средства, соответствующего этому распределению.
7. Способ по любому из пп.5 или 6, отличающийся тем, что перед аналитической оценкой распределения обнаруживают и исключают выпадающие значения в распределении вторых положений угла поворота.
8. Способ по п.5, отличающийся тем, что при скоплении вторых положений угла поворота около 0° или соответственно 360° распределение вторых положений угла поворота смещают на заданную величину по оси абсцисс, например на 90° или 180°.
9. Способ по п.1, отличающийся:
(a) определением соответствующих вторых положений угла поворота для каждого колеса (11, 22) транспортного средства, по меньшей мере, для двух поочередно принятых на транспортном средстве сигналов передачи блока (12, 21) электроники колеса;
(b) расчетом значений разности соответствующих положений угла поворота для каждого колеса (11, 22) транспортного средства;
(c) расчетом частных от делений рассчитанных значений разности на значение, соответствующее одному полному обороту колеса (11, 22) транспортного средства;
(d) определением местоположения (VL, VR, HL, HR) монтажа в качестве колеса (11, 22) транспортного средства, которое имеет наиболее низкое частное.
10. Способ по п.9, отличающийся тем, что блок (12, 21) электроники колеса передает, по меньшей мере, N сигналов передачи, и при этом для аналитической оценки и определения местоположения монтажа колеса (11, 22) транспортного средства используют, по меньшей мере, N/2, предпочтительно (N-1) и особенно предпочтительно до N×(N-1)/2 комбинаций вторых угловых положений колеса, для которых соответственно выполняют этапы (b) и (с), причем на этапе (d) в качестве местоположения (VL, VR, HL, HR) монтажа определяют то колесо (11, 22) транспортного средства, которое кумулятивно имеет наименьшее частное и/или наименьшее распределение частных.
11. Способ по п.1, отличающийся тем, что время задержки, которое получается вследствие составления блоком электроники колеса сообщения для сигнала (X1) передачи, намеренно введенных задержек или времени простоя, передачи сигнала (X1) передачи, вследствие приема и аналитической оценки сигнала (X1) передачи на транспортном средстве, ретрансляции первых показаний угла поворота, полученных на основании принятого сигнала (X1) передачи, определения и ретрансляции вторых показаний угла поворота и согласование первых и вторых показаний угла поворота, одновременно используют при аналитической оценке и при упомянутом согласовании.
12. Способ по п.1, отличающийся тем, что вторые положения частоты вращения определяют путем подсчета нарастающих и/или спадающих фронтов тактового импульса сигнала, определенного посредством датчика частоты вращения, при этом заданное количество фронтов тактового импульса соответствует одному полному обороту колеса (11, 22) транспортного средства.
13. Устройство (20) для локализации местоположения (VL, VR, HL, HR) колес (11, 22) транспортного средства в автомобиле (10), в частности, посредством способа по любому из пп.1-12,
включающее в себя, по меньшей мере, один блок (12, 21) электроники колеса, который расположен в колесе (11, 22) транспортного средства и предназначен для того, чтобы определять первое положение угла поворота соответствующего ему колеса (11, 22) транспортного средства и передавать на приемное устройство, находящееся на транспортном средстве, первое показание угла поворота, зависящее от определенного первого положения угла поворота;
включающее в себя, по меньшей мере, один находящийся на транспортном средстве датчик (31) частоты вращения, который предназначен для того, чтобы определять соответственно вторые положения угла поворота соответствующих им колес (11, 22) транспортного средства и в зависимости от этого предоставлять вторые показания угла поворота;
включающее в себя устройство (24) аналитической оценки, которое согласовывает первое показание угла поворота, по меньшей мере, с двумя вторыми показаниями угла поворота и в зависимости от этого согласования определяет местоположение (VL, VR, HL, HR) монтажа колеса (11, 22) транспортного средства, соответствующего блоку (12, 21) электроники колеса.
14. Устройство по п.13, отличающееся тем, что датчик (31) частоты вращения выполнен в виде датчика частоты вращения системы ESP или датчика частоты вращения системы ABS.
15. Автомобиль (10), в частности легковой автомобиль, снабженный несколькими колесами (11, 22) транспортного средства и устройством информации о шинах, которое оснащено устройством (20) по любому из пп.13 или 14.
| EP 0997326 A2, 03.05.2000 | |||
| US 7336161 B2, 26.02.2008 | |||
| DE 19618658 A1, 13.11.1997 |

