ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка относится к способам для оценки уровней текучей среды для отработавших газов в бачке для хранения текучей среды для отработавших газов посредством использования ультразвукового датчика уровня.
УРОВЕНЬ ТЕХНИКИ
Для того чтобы регулировать выбросы из системы выпуска транспортного средства, системы очистки отработавших газов применяются в выпускном канале двигателя. В некоторых примерах, система очистки отработавших газов может включать в себя систему избирательного каталитического восстановления (SCR) для снижения выбросов оксидов азота (NOx) из отработавших газов. Транспортные средства, оборудованные системой SCR, впрыскивают восстановитель, такой как водный раствор мочевины ((NH2)2CO), в выпускной канал выше по потоку от каталитического нейтрализатора SCR. Раствор мочевины при термическом разложении в выпускном канале формирует аммиак (NH3), который затем адсорбируется в поверхность каталитического нейтрализатора. Например, газы NOx в выпускном канале реагируют с адсорбированным аммиаком, чтобы формировать азот (N2) и воду (H2O).
Водный раствор мочевины может храниться в бачке для хранения текучей среды для отработавших газов на борту транспортного средства и контролироваться, так чтобы надлежащее действие по умолчанию могло предприниматься, если содержится недостаточное количество раствора, или если добавляются неуместные разбавители. Датчики уровня в бачке могут использоваться для выявления количества мочевины, оставшейся в бачке, для того чтобы содействовать контролю системы SCR. Когда уровень раствора мочевины низок, предупреждение может указываться водителю. Подобным образом, изменения уровня могут использоваться в комбинации с другими данными, чтобы выявлять количество раствора. Однако, во время некоторых условий эксплуатации двигателя, когда бачок для текучей среды для отработавших газов подвергается ускорению и/или наклону, датчик уровня может указывать неточные измерения уровня жидкости.
Один из примерных подходов для принятия мер в ответ на неточные измерения уровня датчиком уровня предусмотрен Минезавой и другими в US 2013/0055700. В нем, выходной сигнал датчика уровня мочевины пропускается через фильтр нижних частот, имеющий постоянную времени, основанную на числе оборотов двигателя. Однако, изобретатели в материалах настоящей заявки идентифицировали потенциальные проблемы у такого подхода. Например, подход Минезавы допускает искажения измерений датчика уровня, которые соотносятся с вибрациями, вызванными скоростью, и не учитывают потери сигнала, обусловленные наклоном бачка для хранения текучей среды для отработавших газов или мелким поверхностным рельефом, которые могут происходить, когда транспортное средство находится в движении, и когда транспортное средство находится в состоянии покоя. Например, некоторые условия эксплуатации транспортного средства, которые вызывают всплескивание или наклон бачка, могут увеличивать или уменьшать высоту жидкости над датчиком, даже если может не быть никаких изменений общего количества жидкости в бачке. Это всплескивание и/или колыхание не только вызывают ошибки измерений, но фактически могут служить причиной потери сигнала при использовании конфигурации с ультразвуковым датчиком. Потеря сигнала может сильно влиять на оценку, даже если фильтруется фильтром нижних частот. Кроме того, такие ситуации потери сигнала имеют от небольшой до никакой корреляции с числом оборотов двигателя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящей заявке раскрыт способ, состоящий в том, что: вырабатывают ультразвуковой сигнал в бачке для текучей среды для отработавших газов транспортного средства; указывают уровень текучей среды на основании фильтрованной отраженной волны ультразвукового сигнала, причем отраженная волна фильтруется на основании интенсивности принятой отраженной волны.
В дополнительном аспекте уровень текучей среды основан на сдвиге по времени отраженного ультразвукового сигнала.
В другом дополнительном аспекте интенсивность основана на амплитуде напряжения отраженного ультразвукового сигнала в приемнике, при этом, отраженная волна фильтруется разностным фильтром, имеющим параметр, основанный на интенсивности.
В еще одном дополнительном аспекте разностный фильтр дополнительно основан на дисперсии отраженной волны.
В еще одном дополнительном аспекте текучая среда для отработавших газов включает в себя мочевину.
В еще одном дополнительном аспекте текучая среда для отработавших газов включает в себя аммиак.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что указывают ухудшение характеристик на основании указанного уровня.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что ограничивают выходную мощность двигателя на основании указанного уровня.
Также раскрыт способ, состоящий в том, что: формируют указание уровня текучей среды для отработавших газов в бачке для хранения текучей среды для отработавших газов с помощью разновременности акустического волнового сигнала, отраженного от поверхности текучей среды для отработавших газов; и используют указание уровня в качестве входного сигнала в фильтр нижних частот, только когда пиковая амплитуда напряжения отраженного акустического волнового сигнала является большей, чем пороговое значение, но продолжают формировать выходной сигнал фильтра на основании предыдущих указаний уровня.
В дополнительном аспекте постоянная времени фильтра нижних частоту для фильтра нижних частот основана на пиковой амплитуде напряжения отраженного акустического волнового сигнала и дисперсии указания уровня.
В другом дополнительном аспекте текучая среда для отработавших газов включает в себя мочевину.
В еще одном дополнительном аспекте текучая среда для отработавших газов включает в себя аммиак.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что указывают ухудшение характеристик на основании указанного уровня.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что ограничивают выходную мощность двигателя на основании указанного уровня.
Кроме того раскрыт способ, состоящий в том, что: в контроллере, принимают первый сигнал с ультразвукового датчика текучей среды для отработавших газов, указывающий уровень текучей среды, принимают второй сигнал с упомянутого датчика, указывающий интенсивность отражения ультразвуковой волны, и формируют фильтрованный уровень посредством того, что фильтруют первый сигнал, только когда второй сигнал является большим, чем пороговое значение, а иначе, поддерживают предыдущий фильтрованный уровень, причем фильтрация включает в себя повышенную фильтрацию нижних частот для меньших изменений уровня, и пониженную фильтрацию нижних частот для больших изменений уровня.
В дополнительном аспекте повышенная или пониженная фильтрация нижних частот основана на втором сигнале и дисперсии уровней текучей среды, указанных упомянутым ультразвуковым датчиком.
В другом дополнительном аспекте контроллер расположен в транспортном средстве, и при этом, упомянутый датчик расположен в бачке, присоединенном к форсунке в выпуске двигателя выше по потоку от устройства снижения токсичности выбросов SCR.
В еще одном дополнительном аспекте интенсивность основана на пиковой амплитуде второго сигнала, причем второй сигнал отличен от первого сигнала, и принимаемого параллельно в контроллере со вторым сигналом.
В еще одном дополнительном аспекте ультразвуковая волна вырабатывается на выбранной частоте.
В еще одном дополнительном аспекте первый сигнал основан на разновременности между тем, когда упомянутый датчик вырабатывает ультразвуковую волну, и тем, когда упомянутый датчик принимает отражение ультразвуковой волны.
В одном из примеров, вышеприведенные проблемы могут быть по меньшей мере частично препоручены способу, такому как способ для системы избирательного каталитического восстановления отработавших газов. Способ может содержать выработку ультразвукового сигнала в бачке для текучей среды для отработавших газов транспортного средства и указание уровня текучей среды на основании фильтрованной отраженной волны ультразвукового сигнала, отраженная волна фильтруется на основании интенсивности или качества принятой отраженной волны. Например, интенсивность отраженного сигнала может быть ниже порогового значения вследствие наклона поверхности мочевины. Следовательно, отраженный сигнал может иметь более низкое качество, которое может быть основано на различии между большими изменениями выходного сигнала датчика, которые вызваны неправильными отражениями, в сравнении с большими изменениями выходного сигнала датчика, вызванными большими изменениями самого уровня текучей среды. Таким образом, посредством фильтрации измерения уровня с датчика на основании качества отраженного сигнала, а также на основании самих измерений уровня, могут получаться более точные измерения уровня.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного объекта патентования, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный объект патентования не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предмет настоящего раскрытия будет лучше понятен по прочтению последующего подробного описания неограничивающих вариантов осуществления со ссылкой на прилагаемые чертежи.
Фиг. 1 показывает принципиальную схему системы транспортного средства, включающую в себя систему очистки отработавших газов с одним бачком для хранения текучей среды для отработавших газов.
Фиг. 2A-2E показывают блок-схемы последовательности операций способа, иллюстрирующие процедуры для уведомления водителя транспортного средства о рабочих параметрах транспортного средства на основании уровня текучей среды в бачке для хранения текучей среды для отработавших газов.
Фиг. 3 показывает блок-схему последовательности операций способа, иллюстрирующую процедуру для инициализации фильтра нижних частот перед оценкой уровня текучей среды в бачке для хранения текучей среды для отработавших газов.
Фиг. 4A и 4B показывают блок-схемы последовательности операций способа, иллюстрирующие процедуры для оценки уровня текучей среды в бачке для хранения текучей среды для отработавших газов. Как пояснено, фиг. 2-4A могут использоваться совместно в варианте осуществления, таком как у системы, которая описана на фиг. 1. Подобным образом, фиг. 2, 3 и 4B могут использоваться совместно в варианте осуществления, таком как у системы, которая описана на фиг. 1.
Фиг. 5 показывает примерное измерение уровня текучей среды, в том числе, первый сигнал мгновенного измерения уровня текучей среды и второй сигнал качества наряду с фильтрованными выходными сигналами.
Фиг. 6 показывает примерное измерение уровня текучей среды, в том числе, первый сигнал мгновенного измерения уровня текучей среды, второй сигнал качества и дисперсию мгновенных измерений наряду с фильтрованными выходными сигналами.
Фиг. 7 показывает примерные сигналы датчика уровня, такие как первый сигнал (Δt) и второй сигнал (p).
ПОДРОБНОЕ ОПИСАНИЕ
Предусмотрены способы и системы для оценки уровня текучей среды для отработавших газов в бачке для хранения текучей среды для отработавших газов, присоединенном к выпускному каналу в системе очистки отработавших газов, включенной в систему транспортного средства (такую как система транспортного средства по фиг. 1). Контроллер может выполнять процедуру, такую как процедура на фиг. 3, для инициализации фильтра для измерения уровня текучей среды для отработавших газов. Контролер затем может выполнять процедуру, такую как процедура на фиг. 4, для оценки уровня текучей среды для отработавших газов в бачке для текучей среды для отработавших газов. В материалах настоящей заявки, уровень текучей среды для отработавших газов может измеряться на основании качества отраженного сигнала, принятого ультразвуковым датчиком, расположенным внутри бачка для текучей среды для отработавших газов. Измерение уровня текучей среды, полученное таким образом, может использоваться для определения рабочих параметров транспортного средства, как проиллюстрировано на фиг. 2A-2E. Пример измерения уровня текучей среды для отработавших газов показан на фиг. 5.
Фиг. 1 показывает принципиальную схему системы 100 транспортного средства. Система 100 транспортного средства включает в себя двигатель 102, который может быть включен в силовую установку транспортного средства. Двигатель 102 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 106 и входными сигналами от водителя транспортного средства через устройство ввода (не показано). Всасываемый воздух вводится в двигатель 102 через впускной канал 108, отработавшие газы, являющиеся результатом сгорания в двигателе 102, выпускаются через выпускной канал 110, ведущий в выхлопную трубу (не показана), которая в итоге направляет отработавшие газы в атмосферу.
Как показано, система 101 очистки отработавших газов, включающая в себя устройство 112 очистки отработавших газов, показана скомпонованной вдоль выпускного канала 110. В примерном варианте осуществления по фиг. 1, система 101 очистки отработавших газов является системой избирательного каталитического восстановления, а устройство 112 очистки отработавших газов является каталитическим нейтрализатором с избирательным каталитическим восстановлением (SCR). Система каталитического нейтрализатора SCR может включать в себя по меньшей мере каталитический нейтрализатор SCR, канал 136 текучей среды для отработавших газов и форсунку 138 текучей среды для отработавших газов. В других примерах, система очистки отработавших газов дополнительно или в качестве альтернативы может включать в себя трехкомпонентный каталитический нейтрализатор (TWC), уловитель NOx, различные другие устройства снижения токсичности отработавших газов или их комбинацию. Кроме того, как изображено, форсунка 138 текучей среды для отработавших газов расположена выше по потоку от устройства 112 очистки отработавших газов. Форсунка 138 текучей среды для отработавших газов впрыскивает текучую среду для отработавших газов в поток отработавших газов для реакции с NOx в устройстве 112 очистки отработавших газов в ответ на сигналы, принятые из контроллера 106. Текучая среда для отработавших газов, например, может быть восстановителем, таким как мочевина или аммиак.
Форсунка 138 текучей среды для отработавших газов питается текучей средой 118 для отработавших газов из бачка 116 для хранения текучей среды для отработавших газов через канал 136 текучей среды для отработавших газов. Бачок 116 для хранения текучей среды для отработавших газов может быть резервуаром, например, пригодным для хранения текучей среды для отработавших газов во всем диапазоне температур. Как изображено на фиг. 1, бачок 116 для хранения текучей среды для отработавших газов включает в себя датчик 104 уровня текучей среды для отработавших газов. Датчик 104 уровня текучей среды для отработавших газов, например, может давать дискретные показания уровня текучей среды для отработавших газов в контроллер 106. Однако, датчик 104 уровня текучей среды для отработавших газов может, в сущности, может быть непрерывным датчиком уровня, выдавая относительно большое количество дискретных показаний в диапазоне от почти пустого уровня текучей среды для отработавших газов до почти полного уровня текучей среды для отработавших газов. Таким образом, датчик 104 уровня текучей среды для отработавших газов может выдавать указание мгновенного уровня текучей среды для отработавших газов в контроллер 106, когда уровень текучей среды для отработавших газов находится в пределах диапазона от почти пустого до почти полного по датчику уровня текучей среды для отработавших газов.
В одном из примеров, датчик уровня текучей среды для отработавших газов может быть ультразвуковым измерительным преобразователем. Ультразвуковой измерительный преобразователь вырабатывает акустические волны 114, которые могут отражаться от поверхности жидкости. По существу, отраженные волны 120 могут приниматься излучающим измерительным преобразователем. Мгновенный уровень жидкости может определяться на основании времени между излученным импульсом и отраженным импульсом, и скорости звука, например, посредством использования скоростей распространения ультразвуковой волны. Ультразвуковой измерительный преобразователь может активироваться периодически для выдачи измерений уровня через равные промежутки времени. Кроме того, пиковая амплитуда напряжения, выдаваемая из ультразвукового датчика, может использоваться для определения качества отраженного сигнала. Должно быть отмечено, что пиковая амплитуда напряжения принятого сигнала является отдельной и отличной от измерения разновременности или сдвига частоты, или другого измерения/указания уровня (например, положения), на котором волна отражается обратно в приемник из передатчика волны (оба из которых размещены в датчике 104). На основании мгновенного измерения уровня с датчика уровня текучей среды для отработавших газов и качества отраженного сигнала, может определяться уровень текучей среды для отработавших газов в бачке для хранения текучей среды для отработавших газов. На основании измерений уровня текучей среды для отработавших газов, могут определяться различные параметры, такие как рабочий запас хода транспортного средства и количество текучей среды для отработавших газов, которое должно быть добавлено в бачок для хранения текучей среды для отработавших газов, как будет подробнее описано ниже со ссылкой на фиг. 2A-2E.
Система очистки отработавших газов дополнительно включает в себя датчик 140 отработавших газов, расположенный ниже по потоку от устройства 112 очистки отработавших газов. В изображенном варианте осуществления, датчик отработавших газов может быть датчиком NOx для измерения количества NOx после SCR. В некоторых примерах, эффективность системы SCR может определяться на основании датчика 140 отработавших газов, а кроме того, на основании датчика 126 отработавших газов, расположенного выше по потоку от системы SCR. В некоторых других примерах, датчик NOx может использоваться для оценки качества текучей среды для отработавших газов, дозаправленной в бачке для хранения текучей среды для отработавших газов.
Контроллер 106 может быть микрокомпьютером, включающем в себя следующее, хотя и не показано на фиг. 1: микропроцессорный блок, порты ввода/вывода, электронный запоминающий носитель для хранения выполняемых программ и калибровочных значений (например, микросхему постоянного запоминающего устройства), оперативное запоминающее устройство, дежурную память, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ, EEPROM) и шину данных. Постоянное запоминающее устройство запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые микропроцессором для выполнения способов, описанных ниже, а также других вариантов, которые предвосхищены, но конкретно не перечислены. Например, контроллер может принимать передаваемую информацию (например, входные данные) с различных датчиков, обрабатывать входные данные и приводить в действие исполнительные механизмы в ответ на обработанные входные данные, на основании команды или управляющей программы, запрограммированных в нем, соответствующих одной или более процедур. Примерные процедуры описаны в материалах настоящей заявки со ссылкой на фиг. 2-4. В одном из примеров, контроллер может принимать входные данные из датчика 104 уровня. Входные данные могут включать в себя мгновенное измерение 132 уровня, и указание качества отраженного сигнала 134, принятого датчиком 104. На основании качества отраженного сигнала, контроллер может оценивать уровень жидкости в бачке для текучей среды для отработавших газов.
Контроллер 106 отправляет сигналы в систему 122 связи, такую как сеть беспроводной связи или локальная сеть контроллеров (CAN). Например, после обработки данных с датчика 104 уровня текучей среды для отработавших газов и оценки параметра, такого как рабочий запас хода транспортного средства, контроллер 106 отправляет сообщение в систему 122 связи, указывающее параметр. Система 122 связи затем может уведомлять водителя транспортного средства через устройство отображения. В одном из примеров, параметр может отображаться на устройстве 124 отображения транспортного средства, таком как приборная панель или другое устройство отображения транспортного средства. В еще одном примере, система 122 связи может отправлять сообщение касательно параметра на мобильное устройство 126 водителя, например, в виде текстового сообщения, или на персональный компьютер 128 в виде письма электронной почты. В качестве еще одного другого примера, система 122 связи дополнительно или в качестве альтернативы может отправлять сообщение третьей стороне 130, такой как торговое представительство по продажам транспортного средства или другой центр обслуживания.
Таким образом, система транспортного средства включает в себя систему очистки отработавших газов, которая включает в себя бачок для хранения текучей среды для отработавших газов с датчиком текучей среды для отработавших газов. Посредством определения уровня текучей среды для отработавших газов на основании мгновенного измерения уровня с датчика уровня текучей среды для отработавших газов и качества отраженного сигнала, могут быть получены более точные измерения уровня текучей среды для отработавших газов. Кроме того, как будет описано ниже, контроллер может оценивать параметр на основании показаний датчика уровня текучей среды для отработавших газов и уведомлять водителя транспортного средства о параметре.
Фиг. 2A-2E показывают блок-схемы последовательности операций способа, иллюстрирующие процедуры для определения различных рабочих параметров транспортного средства и для уведомления водителя транспортного средства различной информацией касательно текучей среды для отработавших газов в бачке 116 для хранения текучей среды для отработавших газов на основании датчика уровня, такого как датчик 104 уровня текучей среды для отработавших газов, расположенный в бачке 116 для хранения текучей среды для отработавших газов, описанного выше со ссылкой на фиг. 1. Например, водитель может уведомляться о рабочем запасе хода транспортного средства, качестве дозаправленной текучей среды для отработавших газов, количестве текучей среды для отработавших газов, которое должно быть добавлено в бачок для хранения текучей среды для отработавших газов, чтобы наполнить бачок, скорости использования текучей среды для отработавших газов и оцененном времени до опустошения бачка для хранения текучей среды для отработавших газов. В примерных процедурах, описанных ниже со ссылкой на фиг. 2A-2E, мочевина используется в качестве примерной текучей среды для отработавших газов. Должно быть отмечено, однако, что процедуры могут быть применены к любой другой пригодной текучей среде для отработавших газов.
Далее, с обращением к фиг. 2A, показана примерная процедура 200a для отображения рабочего запаса хода транспортного средства водителю транспортного средства.
На 204 процедуры 200a, может определяться уровень мочевины в бачке для хранения текучей среды для отработавших газов. Уровень мочевины может определяться на основании измерения уровня датчиком уровня текучей среды для отработавших газов, таким как ультразвуковой датчик уровня, как описано со ссылкой на фиг. 1. Уровень мочевины дополнительно может быть основан на качестве отраженного сигнала, принятого ультразвуковым датчиком. Подробности об определении уровня мочевины в бачке будут дополнительно конкретизированы на фиг. 4.
Затем, на 206, по измерению уровня мочевины в бачке для хранения текучей среды для отработавших газов, может определяться, является ли уровень мочевины большим чем или равным пороговому уровню. Например, пороговый уровень может быть минимальным уровнем мочевины, который должен присутствовать в бачке для хранения текучей среды для отработавших газов, чтобы гарантировать, что транспортное средство является работающим в пределах приемлемых уровней выбросов. На 206, по подтверждению, что уровень мочевины в бачке для хранения является большим чем или равным пороговому значению, контроллер затем может оценивать рабочий запас хода транспортного средства на 208. Например, рабочий запас хода транспортного средства может указывать расстояние, которое транспортное средство может проехать без исчерпания уровня мочевины в бачке ниже порогового уровня. Рабочий запас хода транспортного средства может быть основан на уровне мочевины в бачке для хранения текучей среды для отработавших газов и средней экономии топлива транспортным средством в эксплуатации. Затем, на 210, контроллер может уведомлять водителя о рабочем запасе хода транспортного средства.
Возвращаясь на 206, если измеренный уровень мочевины находится ниже порогового уровня, контроллер может устанавливать рабочий запас хода транспортного средства в 0 миль, указывая, что транспортное средство не может ехать без пополнения мочевины в бачке для хранения. Впоследствии, на 214, водитель транспортного средства может уведомляться о рабочем запасе хода транспортного средства, и может отображаться предупреждение, указывающее низкий уровень мочевины в бачке.
Например, рабочий запас хода транспортного средства и/или предупреждение о низком уровне мочевины могут отображаться на приборной панели транспортного средства. В некоторых примерах, водитель может уведомляться с помощью системы связи, такой как WIFI, Bluetooth, SYNC, или тому подобное. Например, контроллер может отправлять сообщение водителю с помощью системы связи. Сообщение может отображаться на устройстве отображения транспортного средства на приборной панели или в другом месте транспортного средства, отправляться на мобильное устройство водителя (например, посредством текстового сообщения), отправляться по электронной почте водителю, и т.д.
В других примерах, контроллер дополнительно или в качестве альтернативы может отправлять сообщение через систему связи, уведомляющее третью сторону о рабочем запасе хода транспортного средства, и/или предупреждение о низком уровне мочевины. Например, третья сторона может быть местным представительством по транспортным средствам, в котором водитель покупал транспортное средство, и/или которое водитель привлекает для технического обслуживания транспортного средства, или третья сторона может быть другим центром обслуживания транспортных средств.
Таким образом, рабочий запас хода транспортного средства может определяться на основании уровня мочевины в бачке для хранения текучей среды для отработавших газов. По определению рабочего запаса хода транспортного средства, водитель транспортного средства может уведомляться о рабочем запасе хода транспортного средства непосредственно контроллером через устройство отображения в транспортном средстве или сообщение, отправленное на пригодное вычислительное устройство, такое как мобильное устройство или персональный компьютер. Пользователь также может уведомляться о рабочем запасе хода транспортного средства через третью сторону, такую как местное представительство по транспортным средствам.
С обращением к фиг. 2B, она показывает блок-схему последовательности операций способа, иллюстрирующую примерную процедуру 200b для выполнения проверки качества мочевины после события дозаправки мочевиной и уведомления водителя транспортного средства о качестве мочевины. Например, на основании проверки качества мочевины, водитель транспортного средства может уведомляться об ухудшении качества мочевины или приемлемом качестве мочевины.
На 222 может определяться уровень мочевины в бачке для хранения текучей среды для отработавших газов. Уровень мочевины может определяться на основании измерения уровня датчиком уровня текучей среды для отработавших газов, таким как ультразвуковой датчик уровня, как описано со ссылкой на фиг. 1. Уровень мочевины дополнительно может быть основан на качестве отраженного сигнала, принятого ультразвуковым датчиком. Подробности об определении уровня мочевины в бачке будут дополнительно конкретизированы на фиг. 4.
Затем, на 224, может определяться, выявлена ли дозаправка раствора мочевины. Если да, процедура может переходить на 226, на котором проверка качества мочевины может выполняться для определения качества мочевины в дозаправленном бачке для хранения текучей среды для отработавших газов. Например, некоторые водители транспортных средств могут наполнять бачок для хранения текучей среды для отработавших газов водой вместо мочевины. Во время таких условий, достаточного количества мочевины может не быть в распоряжении для термического разложения на аммиак вследствие разбавления раствора мочевины водой. Как результат, каталитический нейтрализатор отработавших газов может быть истощен по восстановителю, и токсичные газы NOx в отработавших газах могут не восстанавливаться в достаточной мере. Следовательно, уровни выбросов NOx могут превышать предел, установленный нормами выбросов. Для того чтобы предотвращать чрезмерные выбросы NOx, проверка качества мочевины может выполняться после того, как было выявлено события дозаправки бачка для отработавших газов. Выполнение проверки качества мочевины может включать в себя определение уровней выбросов NOx. Уровни выбросов NOx могут определяться на основании датчиков NOx (описанных со ссылкой на фиг. 1), расположенных выше по потоку и ниже по потоку от каталитического нейтрализатора отработавших газов.
По определению уровней выбросов NOx, на 228, процедура может проверять, превысили ли уровни выбросов NOx пороговый предел. Если да, то, на 230, водитель может уведомляться о плохом качестве мочевины с принуждением водителя транспортного средства предпринимать подходящее действие для предотвращения чрезмерных выбросов NOx из транспортного средства. Если, на 230, уровни выбросов NOx не являются большими, чем пороговое значение, может определяться, что мочевина приемлемого качества присутствует в бачке для хранения текучей среды для отработавших газов и, на 232, водитель может уведомляться о приемлемом качестве мочевины. Например, уведомление касательно качества мочевины может отображаться на приборной панели транспортного средства. В некоторых примерах, водитель может уведомляться о качестве мочевины в бачке с помощью системы связи, такой как WIFI, Bluetooth, SYNC, или тому подобное. Например, контроллер может отправлять сообщение водителю с помощью системы связи. Сообщение может отображаться на устройстве отображения транспортного средства на приборной панели или в другом месте транспортного средства, отправляться на мобильное устройство водителя (например, посредством текстового сообщения), отправляться по электронной почте водителю, и т. д.
В других примерах, контроллер дополнительно или в качестве альтернативы может отправлять сообщение через систему связи, уведомляющее третью сторону о качестве мочевины, дозаправленной в бачке для хранения текучей среды для отработавших газов. Например, третья сторона может быть местным представительством по транспортным средствам, в котором водитель покупал транспортное средство, и/или которое водитель привлекает для технического обслуживания транспортного средства, или третья сторона может быть другим центром обслуживания транспортных средств.
Возвращаясь на 224, если дозаправка раствора мочевины не выявлена, то, на 234, контроллер может отменять запуск проверки качества мочевины.
Таким образом, дозаправка раствора мочевины может выявляться на основании уровня мочевины в бачке для хранения текучей среды для отработавших газов. По выявлению дозаправки, может выполняться проверка качества мочевины, и водитель транспортного средства может уведомляться о качестве мочевины в бачке после события дозаправки. Посредством выполнения проверки качества мочевины после каждого события дозаправки, могут контролироваться рабочие характеристики каталитического нейтрализатора, и могут регулироваться уровни выбросов NOx.
Фиг. 2C показывает блок-схему последовательности операций способа, иллюстрирующую процедуру 200c для отображения величины наполнения бачка для хранения мочевины водителю транспортного средства.
На 238 процедуры 200c измеряется уровень мочевины. Например, уровень мочевины может определяться на основании измерений уровня с датчика уровня мочевины, такого как ультразвуковой датчик уровня, описанный выше со ссылкой на фиг. 1. Уровень мочевины дополнительно может быть основан на качестве отраженного сигнала, принятого датчиком уровня. Подробности об измерении уровня мочевины будут конкретизированы на фиг. 4. В одном из примеров, контроллер может запрашивать указание уровня мочевины из датчика уровня мочевины. В еще одном примере, датчик уровня мочевины может отправлять сигнал, указывающий уровень мочевины, в контроллер с предопределенными интервалами, и контроллер может использовать уровень мочевины из последнего показания датчика уровня мочевины.
Как только уровень мочевины измерен, процедура 200 переходит на 240, где определяется количество мочевины, необходимое для наполнения бачка для хранения мочевины до максимального уровня. В качестве примера, контроллер может иметь хранимый уровень максимального наполнения бачка для хранения текучей среды для отработавших газов. На основании уровня мочевины, определенного на 238, контроллер может рассчитывать количество мочевины, которое должно быть добавлено в бачок для хранения мочевины, чтобы наполнить бачок для хранения мочевины до уровня максимального наполнения. Другими словами, контроллер может определять количество максимального наполнения мочевины.
На 242, водитель транспортного средства уведомляется о количестве мочевины, которое должно быть добавлено в бачок для хранения мочевины. Например, количество максимального наполнения мочевины может отображаться на приборной панели транспортного средства с помощью индикаторной лампы. В некоторых примерах, водитель может уведомляться о количестве максимального наполнения с помощью системы связи, такой как WIFI, Bluetooth, SYNC, или тому подобное. Например, контроллер может отправлять сообщение водителю с помощью системы связи. Сообщение может отображаться на устройстве отображения транспортного средства на приборной панели или в другом месте транспортного средства, отправляться на мобильное устройство водителя (например, посредством текстового сообщения), отправляться по электронной почте водителю, и т. д.
В других примерах, контроллер дополнительно или в качестве альтернативы может отправлять сообщение через систему связи, уведомляющее третью сторону о количестве мочевины, которое должно быть добавлено в бачок для хранения мочевины. Например, третья сторона может быть местным представительством по транспортным средствам, в котором водитель покупал транспортное средство, и/или которое водитель привлекает для технического обслуживания транспортного средства, или третья сторона может быть другим центром обслуживания транспортных средств. В таком примере, третья сторона может использовать количество максимального наполнения для добавления корректного количества мочевины в бачок для хранения мочевины без переполнения бачка для хранения мочевины.
В некоторых примерах, водитель транспортного средства (и/или третья сторона) может наполнять бачок для хранения мочевины бутылью, которая не имеет автоматического перекрывания потока текучей среды. В некоторых вариантах осуществления, водитель транспортного средства может вводить объем бутыли через интерактивный дисплей или тому подобное. Например, водитель транспортного средства может вводить, что такая бутыль содержит в себе 1 литр мочевины. Контроллер затем может рассчитывать количество мочевины, необходимой для наполнения бачка для хранения мочевины, на основании уровня мочевины, указываемого датчиком уровня мочевины. В качестве примера, контроллер может определять, что Ѕ литра мочевины должна быть добавлена в бачок для хранения мочевины, чтобы наполнить бачок, и что количество, которое должно быть добавлено, может отображаться водителю транспортного средства. Устройство отображения дополнительно может указывать, что количество мочевины, необходимое для наполнения бачка для хранения мочевины, является половиной бутыли.
Таким образом, количество мочевины, которое должно быть добавлено в бачок для хранения мочевины, может определяться на основании датчика уровня мочевины, и водитель транспортного средства или третья сторона могут уведомляться о количестве. Таким образом, бачок для хранения мочевины может наполняться мочевиной без переполнения бачка для хранения мочевины и расплескивания мочевины. Например, посредством узнавания максимального количества мочевины для добавления в бачок для хранения мочевины, бачок для хранения мочевины может наполняться бутылями, которые не имеют автоматического перекрывания потока текучей среды.
Затем, фиг. 2D показывает блок-схему последовательности операций способа, иллюстрирующую процедуру 200d для отображения скорости потребления или скорости использования мочевины водителю транспортного средства.
На 246 процедуры 200d, уровень мочевины может измеряться за некоторую длительность. Подробности об измерении уровня мочевины, определенном на основании датчика уровня (описанного на фиг. 1), будут конкретизированы на фиг. 4. В одном из примеров, датчик уровня мочевины может отправлять сигнал, указывающий уровень мочевины, в контроллер с предопределенными интервалами на всем протяжении длительности. Например, датчик уровня мочевины может отправлять сигнал, указывающий уровень мочевины, в контроллер каждый раз, когда транспортное средство запускается, каждый раз, когда транспортное средство выключается, через каждые 10, 15, 20, 30 или другое требуемое количество минут работы транспортного средства, или тому подобное. Кроме того, длительность, например, может быть количеством дней, недель или месяцев.
На основании уровней мочевины, определенных на всем протяжении длительности, контроллер определяет скорость потребления мочевины на 248. Скорость потребления мочевины, например, может быть средней скоростью потребления. В качестве примера, скорость потребления мочевины может быть объемом мочевины, используемым в единицу времени. Например, скорость потребления может быть количеством миллилитров в день, литров в месяц, и т.д. В некоторых примерах, водитель транспортного средства может выбирать единицы измерения, в которых скорость потребления рассчитывается или сообщается водителю.
Как только скорость потребления мочевины определена, водитель транспортного средства уведомляется о скорости потребления. Например, скорость потребления может отображаться на приборной панели транспортного средства с помощью индикаторной лампы. В некоторых примерах, водитель может уведомляться о скорости потребления мочевины с помощью системы связи, такой как WIFI, Bluetooth, SYNC, или тому подобное. Например, контроллер может отправлять сообщение водителю с помощью системы связи. Сообщение может отображаться на устройстве отображения транспортного средства на приборной панели или в другом месте транспортного средства, отправляться на мобильное устройство водителя (например, посредством текстового сообщения), отправляться по электронной почте водителю, и т.д.
В других примерах, контроллер дополнительно или в качестве альтернативы может отправлять сообщение через систему связи, уведомляющее третью сторону о скорости потребления мочевины. Например, третья сторона может быть местным представительством по транспортным средствам, в котором водитель покупал транспортное средство, и/или которое водитель привлекает для технического обслуживания транспортного средства, или третья сторона может быть другим центром обслуживания транспортных средств. Третья сторона, например, может регистрировать скорость потребления мочевины транспортного средства.
Таким образом, скорость потребления мочевины может оцениваться датчиком уровня мочевины. Как только контроллер определяет скорость потребления мочевины, водитель транспортного средства может уведомляться о скорости потребления мочевины непосредственно контроллером через устройство отображения в транспортном средстве или сообщение, отправленное на пригодное вычислительное устройство, такое как мобильное устройство или персональный компьютер. Пользователь также может уведомляться о скорости потребления транспортного средства через третью сторону, такую как местное представительство по транспортным средствам.
Фиг. 2E показывает блок-схему последовательности операций способа, иллюстрирующую процедуру для отображения времени до опустошения бачка для хранения мочевины водителю транспортного средства.
На 254, уровень мочевины может определяться в течение некоторой длительности. Как описано выше, определение уровня мочевины может быть основано на измерениях датчика уровня мочевины, которые будут дополнительно описаны на фиг. 4. В одном из примеров, датчик уровня мочевины может отправлять сигнал, указывающий уровень мочевины, в контроллер с предопределенными интервалами на всем протяжении длительности. Например, датчик уровня мочевины может отправлять сигнал, указывающий уровень мочевины, в контроллер каждый раз, когда транспортное средство запускается, каждый раз, когда транспортное средство выключается, через каждые 10, 15, 20, 30 или другое требуемое количество минут работы транспортного средства, или тому подобное. Кроме того, длительность, например, может быть количеством дней, недель или месяцев.
По определению уровня мочевины, средняя скорость потребления мочевины может определяться на 256. В качестве примера, скорость потребления мочевины может быть объемом мочевины, используемым в единицу времени. Например, скорость потребления может быть количеством миллилитров в день, литров в месяц, и т.д. В некоторых примерах, водитель транспортного средства может выбирать единицы измерения, в которых скорость потребления рассчитывается или сообщается водителю. Средняя скорость потребления мочевины, например, может быть той же скоростью потребления, что оценивалась и отображалась водителю транспортного средства в процедуре 200d по фиг. 2D.
На 258 процедуры 200e, может определяться текущий уровень мочевины. На основании текущего уровня мочевины и средней скорости потребления, определенных на 256, время или запас хода до тех пор, пока не пуст бачок для хранения мочевины, определяется на 260. В качестве примера, время до тех пор, пока не пуст бачок для хранения мочевины, может оцениваться в днях, месяцах, годах, и т.д.
Как только определено время до опустошения текущего количества текучей среды для отработавших газов, процедура 200e переходит на 262, где водитель транспортного средства может уведомляться о времени до опустошения. Например, время до опустошения может отображаться посредством образов действий, описанных выше в отношении фиг. 2A- 2D. Водитель транспортного средства в таком случае может уведомляться о времени до того, как бачок для хранения мочевины пуст, через устройство отображения в транспортном средстве или сообщение, отправленное на пригодное вычислительное устройство, такое как мобильное устройство или персональный компьютер. Пользователь также может уведомляться о времени до того, как бачок для хранения пуст, через третью сторону, такую как местное представительство по транспортным средствам.
Таким образом, на основании определенного уровня мочевины, может рассчитываться средняя скорость потребления мочевины, и оцененное время или запас хода до тех пор, пока бачок для хранения мочевины не пуст, могут определяться и передаваться водителю транспортного средства.
Далее, с обращением к фиг. 3, показана примерная процедура 300 для инициализации фильтра нижних частот во время выбранных условий включения зажигания перед измерением уровня мочевины в бачке для хранения текучей среды для отработавших газов. В одном из примеров, фильтр нижних частот может использоваться для фильтрации сигнала мгновенного измерения уровня из ультразвукового датчика уровня, чтобы давать более точные измерения уровня мочевины. Фильтр нижних частот может быть сконфигурирован из условия, чтобы мгновенные измерения уровня (определяемые на основании отраженного сигнала, принятого ультразвуковым датчиком уровня) могли проходить через фильтр нижних частот, только когда качество отраженного сигнала находится выше первого калибруемого порогового значения C1. Кроме того, выходной сигнал фильтра нижних частот может быть основан на постоянных K1 и K2 времени фильтра нижних частот, а реализация фильтров может быть основана на втором калибруемом значении C2. Подробности о конфигурировании фильтра нижних частот, который может использоваться для определения измерений уровня текучей среды для отработавших газов, будут описаны подробнее на фиг. 4. Должно быть отмечено, что в примерных процедурах, описанных ниже со ссылкой на фиг. 3 и 4, мочевина используется в качестве примерной текучей среды для отработавших газов. Должно быть отмечено, однако, что процедуры могут быть применены к любой другой пригодной текучей среде для отработавших газов.
На 302, может определяться, произошло ли событие включения зажигания, сопровождающее событие выключения транспортного средства. Будет принято во внимание, что условия выключения транспортного средства могут меняться на основании конфигурации системы транспортного средства. Например, варианты осуществления условий выключения транспортного средства могут разниться для ориентированных на гибридный привод систем транспортного средства, ориентированных на негибридный привод систем транспортного средства и ориентированных на кнопочный запуск двигателя систем транспортного средства. Будет принято во внимание, однако, что условия выключения транспортного средства, указываемые ссылкой в материалах настоящей заявки один в один эквивалентны условиям выключения двигателя.
В качестве первого примера, в транспортных средствах, сконфигурированных активным ключом, состояние выключения транспортного средства может включать в себя состояние выключения ключа зажигания. По существу, в основанных на активном ключе конфигурациях транспортного средства, активный ключ вставляется в замочную скважину для перемещения гнезда замочной скважины между первым положением, соответствующим выключенному состоянию транспортного средства, вторым положением, соответствующим состоянию включения транспортного средства, и третьим положением, соответствующим состоянию включения стартера. Чтобы начать проворачивание коленчатого вала двигателя транспортного средства, ключ вставляется в замочную скважину, и гнездо перемещается из первого положения в третье положение через второе положение. Событие выключения транспортного средства происходит, когда активный ключ используется для возврата гнезда из третьего положения в первое положение, сопровождаемого удалением ключа из гнезда. В ответ на возврат гнезда в первое положение и удаление активного ключа, указывается выключенное состояние двигателя, а также выключения транспортного средства.
В качестве второго примера, в транспортных средствах, сконфигурированных кнопкой пуска/останова, выключенное состояние транспортного средства может включать в себя состояние приведенной в действие кнопки останова. В таких вариантах осуществления, транспортное средство может включать в себя ключ, который вставляется в гнездо, а также дополнительную кнопку, которая может перемежаться между положением пуска и положением останова. Чтобы начать проворачивание коленчатого вала двигателя, ключ транспортного средства вставляется в замочную скважину для перемещения гнезда в положение «включено» и, дополнительно, кнопка пуска/останова нажимается (или приводится в действие) в положение пуска, чтобы начать работу стартера двигателя. В материалах настоящей заявки, выключенное состояние транспортного средства указывается, когда кнопка пуска/останова приводится в действие в положении останова.
В качестве третьего примера, в транспортных средствах, сконфигурированных пассивным ключом, выключенное состояние транспортного средства может включать в себя пассивный ключ, находящийся за пределами порогового расстояния транспортного средства. Пассивный ключ может включать в себя идентификационную метку, такую как RFID-метку, или устройство беспроводной связи с определенным шифрованным кодом. В таких вариантах осуществления, вместо замочной скважины, пассивный ключ используется для указания присутствия водителя транспортного средства в транспортном средстве. Может быть дополнительная кнопка пуска/останова предусмотрена, которая может перемежаться между положением пуска и положением останова, чтобы соответствующим образом запускать или останавливать двигатель транспортного средства. Для запуска работы двигателя, пассивный ключ должен присутствовать внутри транспортного средства (или в пределах порогового расстояния от транспортного средства), и кнопке необходимо нажиматься (приводиться в действие) в положении пуска, чтобы начать приведение в действие стартера двигателя. Выключенное состояние транспортного средства (а также выключения двигателя) указывается присутствием пассивного ключа вне транспортного средства или за пределами порогового расстояния от транспортного средства.
Возвращаясь на 302, по определению, что событие включения зажигания произошло вслед за состоянием выключения транспортного средства, фильтр нижних частот может инициализироваться на основании значений из предыдущего ездового цикла, для того чтобы выдавать сигнал при включении зажигания. Например, выходной сигнал фильтра нижних частот, две постоянных K1 и K2 времени фильтра нижних частот и калибруемые пороговые значения C1 и C2 могут инициализироваться на основании значений из предыдущего ездового цикла. Значения из ездового цикла транспортного средства могут храниться в ЭСППЗУ, а потому, значения для инициализации фильтра нижних частот могут извлекаться из ЭСППЗУ.
По инициализации фильтра нижних частот, процедура 300 может возвращаться на этап 402, описанный на фиг. 4, чтобы оценивать уровень мочевины в бачке для хранения текучей среды для отработавших газов.
Если условие включения зажигания не удовлетворено на 302, процедура может возвращаться на этап 402 по фиг. 4A или на этап 416 по фиг. 4B.
Таким образом, во время выбранных событий включения зажигания, фильтр нижних частот может инициализироваться на основании последнего значения из предыдущего ездового цикла.
Фиг. 4A и 4B иллюстрируют примерные процедуры 400a и 400b для определения уровня мочевины в бачке для хранения текучей среды для отработавших газов. В материалах настоящей заявки, уровень мочевины может определяться на основании мгновенного измерения уровня из ультразвукового датчика уровня, расположенного в бачке для хранения текучей среды для отработавших газов, и указания качества отраженного сигнала, принятого ультразвуковым датчиком уровня.
С обращением к фиг. 4A, на 402, процедура может включать в себя следующие этапы: (i) определение показания мгновенного уровня мочевины из ультразвукового датчика, u(t), (ii) определение указания качества отраженного сигнала, принятого датчиком, v(t), и (iii) определение выходного сигнала фильтра нижних частот, y(t). Качество отраженного сигнала v(t) может измеряться в виде пиковой амплитуды напряжения, выдаваемой измерительным преобразователем при считывании отраженной акустической волны. Как отмечено в материалах настоящей заявки, показание мгновенного уровня мочевины с ультразвукового датчика, u(t), может быть основано на разновременности между отправкой и приемом ультразвукового сигнала из и в датчик 104. Разновременность может быть указывающей расстояние от датчика, на котором расположена поверхность текучей среды, и таким образом, может указывать уровень текучей среды (причем, более короткая разновременность указывает более низкие уровни, и наоборот). Сигнал u(t) основан на разновременности и не основан на уровне напряжения принятого сигнала. Например, даже если сигнал отражается обратно слабо, пока он находится выше минимального порогового уровня напряжения, он дает действительное измерение для определения разновременности. Подобным образом, если сигнал отражается обратно сильно, но указывая такую же разновременность, как слабоотраженный сигнал, идентичная разновременность, а соответственно, уровень, указывается и используется в качестве u(t). Однако, как описано в материалах настоящей заявки, интенсивность отраженного сигнала затем используется в качестве параметра фильтра в дискретном разностном фильтре, чтобы игнорировать (например, в большей или меньшей степени, возможно пропорциональной интенсивности) определенные показания слабого сигнала при фильтрации или усреднении показаний датчика. К тому же, несмотря на то, что один из примеров сигнала u(t) основан на разновременности, могут использоваться различные подходы с распространением волн, такие как сдвиг частоты или различные комбинации разновременности, сдвигов частоты, разностей длин волн, и т.д.
Затем, на 410, может определяться, является ли качество, такое как интенсивность, отраженного сигнала v(t) большим, чем первое калибруемое пороговое значение C1 напряжения. Первое калибруемое пороговое значение C1 напряжения может быть пороговым значением, выше которого качество отраженного сигнала может считаться высоким, а ниже которого качество отраженного сигнала может считаться низким. Если, на 410, качество отраженного сигнала не является большим, чем пороговое значение C1, процедура может переходить на 414. На 414, мгновенное измерение u(t) уровня может не пропускаться через фильтр нижних частот, и выходной сигнал y(t) фильтра может не обновляться новым в контроллере, но, скорее, может сохраняться и выводиться предыдущее определенное значением, например, в t-Ts, где Ts - время выборки отсчетов. Например, если определено, что качество отраженного сигнал не является большим, чем C1, отраженный сигнал может считаться ненадежным. Низкое качество сигнала, а отсюда, ненадежные сигналы могут возникать, когда поверхность мочевины не параллельна ультразвуковому измерительному преобразователю (то есть, поверхность мочевины может находиться под углом относительно ультразвукового измерительного преобразователя), например, так, как в течение периодов большого ускорения или изменений наклона бачка. Поэтому, условие качества, v(t)>C1, предотвращает любые обновления в отношении выходного сигнала фильтра, когда качество сигнала не является надежным, и фильтр может продолжать формировать выходной сигнал на основании предыдущих указаний уровня.
Возвращаясь на 410, если качество сигнала является большим, чем C1, процедура может переходить на 412. Например, если качество отраженного сигнала является большим, чем C1, может определяться, что качество сигнала является высоким, а потому, сигнал может считаться надежным. Следовательно, по определению сигнала надежным, показание мгновенного уровня может подвергаться фильтрации нижних частот, как описано ниже.
На 412, по подтверждению высокого качества отраженного сигнала, контроллер может определять выходной сигнал y(t) фильтра нижних частот на основании постоянной Kf времени фильтра нижних частот и мгновенного измерения u(t) уровня, так что, y(t)=f(u(t), Kf). Постоянная Kf времени фильтра нижних частот может быть основана на качестве отраженного сигнала v(t) и дисперсии мгновенных измерений уровня на всех последних N отсчетах (N - количество отсчетов). Дисперсия может включать в себя меру того, насколько широко рассосредоточен набор отсчетов отраженного сигнала. В одном из примеров, дисперсия может определяться на основании функции плотности распределения вероятности при условии случайного распределения данных.
В одном из примеров, постоянная времени фильтра нижних частот может быть определена в качестве Kf=f(v(t), var(u(t-NTs:t))). Постоянная Kf времени может калиброваться, из условия чтобы функция f(v(t), var(u(t-NTs:t))) определяла относительно более короткую постоянную времени, когда мгновенное измерение уровня имеет более высокое качество и более низкую дисперсию, и из условия чтобы функция f(v(t), var(u(t-NTs:t))) определяла относительно более длинную постоянную времени, когда мгновенное измерение уровня имеет более низкое качество и/или более высокую дисперсию. Например, во время условий, которые вызывают наклон бачка, качество мгновенного измерения уровня может быть более низким, а во время условий всплескивания (таких как в течение периодов большого ускорения или эксплуатации транспортного средства в неровной местности), дисперсия может быть более высокой. Во время таких условий более низкого качества и/или более высокой дисперсии сигнала, может быть реализована более длинная постоянная времени для фильтра нижних частот. Посредством становления постоянной времени фильтра более длинной, может понижаться чувствительность фильтра к ошибочным измерениям уровня. Другими словами, фильтр может не реагировать быстро на нежелательные изменения измерений уровня (во время всплескивания, наклона, и т.д.), когда ниже качество мгновенных измерений уровня, и/или когда выше дисперсия
Однако, выходной сигнал фильтра может быть чувствительным к событиям дозаправки или утечки бачка. Например, при дозаправке бачка или возникновении утечки, начальное мгновенное измерение уровня может резко возрастать или убывать, а последующие мгновенные измерения уровня могут не показывать больших отклонений (в противоположность условиям всплескивания, которые могут показывать большие отклонения мгновенных временных измерений). Поэтому, качество сигнала может быть более высоким, а дисперсия может быть более низкой. Следовательно, выходной сигнал фильтра может быть основан на более короткой постоянной времени фильтра. Как результат, вследствие более короткой постоянной времени фильтра, фильтр может быстрее реагировать на изменения, обусловленные дозаправкой или утечкой, и может выявлять событие дозаправки или утечки в более быстром масштабе времени, чем когда используется более длинная постоянная времени, такая как во время условий наклона или всплескивания.
Таким образом, посредством использования фильтра нижних частот, как описано выше, может измеряться уровень мочевины в бачке для хранения текучей среды для отработавших газов. Посредством конфигурирования постоянной времени фильтра нижних частот на основании качества отраженного сигнала и дисперсии мгновенного измерения уровня на предопределенном количестве отсчетов, могут уменьшаться различные воздействия на измерения уровня, например, такие как наклон, вибрация и/или всплескивание бачка, а отсюда, могут получаться более точные измерения уровня. Кроме того, фильтр, описанный выше, дает возможность более быстрого выявления дозаправки или утечки бачка.
В одном из примеров, описанном ниже на фиг. 4B, фильтр нижних частот может перенимать более быструю или более медленную постоянную времени на основании разности между мгновенным измерением уровня и фильтрованным выходным сигналом.
Фиг. 4B иллюстрирует примерную процедуру 400b для определения измерения уровня текучей среды для отработавших газов.
На 416, контролер может определять мгновенный уровень u(t) мочевины на основании мгновенного показания с датчика уровня текучей среды для отработавших газов, такого как ультразвуковой датчик уровня. Контролер дополнительно может определять качество отраженного сигнала v(t) на основании амплитуды отраженного сигнала и выходного сигнала из фильтра нижних частот. Как обсуждено раньше в материалах настоящей заявки, мгновенное измерение u(t) уровня может быть основано на разновременности между ультразвуковым сигналом, отправленным датчиком, и отраженной волной, принятой датчиком.
На 424, может определяться, является ли качество отраженного сигнала большим, чем первое калибруемое пороговое значение C1. Если да, на 426, по подтверждению качества отраженного сигнала большим, чем пороговое значение C1, может определяться, является ли разность между мгновенным измерением и фильтрованным выходным сигналом меньшей, чем второе калибруемое пороговое значение C2 уровня (то есть, справедливо ли |y(t-Ts)-u(t)|<C2, где Ts - время выборки отсчетов). Если да, процедура может переходить на 428, где контроллер может определять выходной сигнал фильтра на основании мгновенного измерения u(t) уровня и меньшей постоянной K1 времени фильтра нижних частот. Например, если отклонение измерения уровня находится ниже, чем пороговое значение, может использоваться меньшая постоянная времени фильтра нижних частот. Таким образом, изменения измерений уровня могут фиксироваться быстрее, без необходимости отфильтровывать большие отклонения сигнала.
Однако, если разность между мгновенным измерением уровня и фильтрованным выходным сигналом является большей, чем второе калибруемое пороговое значение C2, процедура может переходить на 430. На 430, контроллер может использовать большую постоянную K2 времени для фильтра, а потому, выходной сигнал y(t) фильтра может быть основан на мгновенном измерении уровня и большей постоянной K2 времени фильтра нижних частот. Посредством использования большей постоянной времени фильтра нижних частот, когда мгновенное измерение уровня находится дальше от фильтрованного выходного сигнала, может уменьшаться влияние измерений уровня с выпадающими значениями. Постоянные K1 и K2 времени фильтра нижних частот могут быть определены в качестве функций ускорения транспортного средства.
Возвращаясь к 424, если качество отраженного сигнала не является большим, чем пороговое значение C1, то есть, когда сигнал ненадежен, выходной сигнал фильтра может не обновляться. Взамен, может использоваться самый поздний предыдущий выходной сигнал фильтра, который был получен, когда качество сигнала было надежным (то есть, в момент t-Ts времени, где Ts - время выборки отсчетов).
Таким образом, посредством использования фильтра нижних частот, конфигурируемого на основании качества сигнала, принятого датчиком уровня, могут уменьшаться ошибки измерений уровня, обусловленные вибрацией, наклоном и/или всплескиванием бачка для хранения текучей среды для отработавших газов. Кроме того, посредством конфигурирования постоянных времени фильтра нижних частот на основании ускорения транспортного средства, воздействия отклонений сигнала, обусловленных ускорением транспортного средства, могут уменьшаться, а изменения уровня мочевины могут фиксироваться быстрее и эффективнее. В некоторых примерах, выбор более высокого или боле низкого параметра (например, K1, K2) также может быть основано на качестве сигнала, из условия чтобы большая постоянная времени могла применяться для более низкого качества сигнала, и наоборот, в дополнение к избирательному вводу сигнала на основании качества сигнала. В еще одном другом примере, качество сигнала может быть основано на относительно амплитуде отраженной волны, такой как амплитуда отраженного сигнала по сравнению с амплитудой волны, отправленной датчиком. Например, по мере того, как относительная амплитуда между принятым и отправленным сигналами убывает, пропорционально более низкое качество может указываться, а затем, использоваться для фильтрации, как описано в материалах настоящей заявки.
Таким образом, в одном из примеров. мгновенный выходной сигнал датчика может не пропускаться через фильтр, и значение измерения уровня может не обновляться в контроллере, когда отраженный сигнал является менее надежным. Только когда качество отраженного сигнала находится выше порогового значения, мгновенный выходной сигнала датчика может пропускаться через фильтр нижних частот, и значение выходного сигнала фильтра (то есть, измерение уровня) может обновляться в контроллере. Когда не обновляется, предыдущие выходные сигналы фильтра сохраняются, так что оценка уровня имеется в распоряжении независимо от того, обновлен ли фильтр.
С обращением к фиг. 5, показан примерный выходной сигнал фильтра, указывающий измерения уровня текучей среды для отработавших газов во время разных условий наклона бачка для хранения текучей среды для отработавших газов. Более точно, диаграмма 500a показывает мгновенное измерение уровня с ультразвукового датчика уровня на графике 502, измерение уровня после пропускания через фильтр ультразвукового датчика на 504 и измерение уровня после пропускания через фильтр, описанный в материалах настоящей заявки (на фиг. 4B) на графике 506. Диаграмма начерчена с уровнем (в миллиметрах) вдоль оси y и временем (в секундах) вдоль оси x. Диаграмма 500b показывает качество отраженного сигнала, принятого ультразвуковым датчиком (график 508), относительно порогового значения 510 в моменты времени, когда определяются мгновенные измерения уровня. Диаграмма 500b начерчена с качеством сигнала вдоль оси y и временем (в секундах) вдоль оси x.
В t1, бачок может быть наклонен в направлении датчика уровня, например, вследствие наклона транспортного средства. Кроме того, между t1 и t2, бачок может продолжать быть наклоненным в направлении датчика уровня. Поскольку бачок наклонен к датчику уровня, уровень текучей среды над датчиком уровня может возрастать. Кроме того, вследствие наклона бачка, поверхность текучей среды для отработавших газов может не быть параллельной датчику уровня. Как результат, мгновенные измерения уровня могут указывать высокие и низкие измерения (график 502). Эти высокие и низкие измерения во время наклона бачка главным образом соответствуют низкому качеству сигнала (то есть, качеству сигнала ниже порогового значения 510), как указано на графике 508 на диаграмме 500b. Фильтр, описанный в материалах настоящей заявки на фиг. 4B, учитывает качество отраженного сигнала, и выходной сигнал фильтра (график 506) настраивается на основании качества сигнала. Например, мгновенное измерение пропускается через фильтр нижних частот, и выходной сигнал фильтра обновляется в контроллере, только если качество сигнала находится выше порогового значения 510. Фильтр датчика уровня, с одной стороны, не настраивает свой выходной сигнал (график 504) на основании качества сигнала.
В t2, вследствие изменений эксплуатации транспортного средства, бачок может возвращаться обратно в горизонтальное положение (то есть, бачок может не быть наклоненным к или от датчика). Следовательно, поверхность текучей среды для отработавших газов может быть параллельной ультразвуковому датчику. Поэтому, между t2 и t3, вследствие нахождения бачка для текучей среды для отработавших газов в уровень с датчиком текучей среды для отработавших газов, качество сигнала может быть выше порогового значения 510 (график 508), и, соответственно, мгновенные измерения уровня (график 502) могут быть согласованными (без больших отклонении), и могут быть согласованными выходные сигналы из фильтра датчика уровня (график 504) и фильтра, описанного на фиг. 4B (график 506).
Затем, в t3, вследствие еще одного изменения условий эксплуатации транспортного средства, бачок может быть наклонен от датчика и может продолжать оставаться наклоненным от датчика до t4. Вследствие наклона бачка между t3 и t4, поверхность текучей среды для отработавших газов может не быть параллельной датчику уровня. Поэтому, мгновенные измерения уровня могут показывать высокие и низкие измерения (график 502), и, соответственно, качество сигнала (график 508) может падать ниже порогового значения 510. Кроме того, вследствие наклона бачка, даже если нет изменения общего количества текучей среды для отработавших газов в бачке, уровень текучей среды для отработавших газов над датчиком может снижаться. Поскольку фильтр датчика уровня не учитывает качество сигнала, выходной сигнал из фильтра (504) датчика уровня может указывать значительно более низкие измерения текучей среды для отработавших газов, чем ожидаемое значение. Однако, фильтр, описанный в материалах настоящей заявки, посредством учета качества отраженного сигнала, вырабатывает более точный выходной сигнал (график 506), который находится ближе к ожидаемому значению и устойчив к большим отклонениям измерений уровня.
В заключение, в t4, бачок может не быть наклонным, и поверхность текучей среды для отработавших газов может быть параллельна датчику уровня. Соответственно, качество сигнала (график 508) может быть выше порогового значения 510, а выходные сигналы фильтра (графики 504 и 506) могут быть согласованы с ожидаемым значением.
Таким образом, посредством использования качества сигнала в качестве основы для фильтрации мгновенного выходного сигнала, могут уменьшаться ошибки измерений уровня текучей среды для отработавших газов, например, обусловленные наклоном бачка, вибрациями транспортного средства и/или всплескиванием.
Фиг. 6 показывает примерное определение уровня текучей среды для отработавших газов во время условий, таких как наклон, тряска бачка, и т.д., посредством использования фильтра нижних частот с постоянной времени, конфигурируемой на основании качества сигнала и дисперсии мгновенного измерения уровня, при этом, фильтр нижних частот может быть реализован, как описано на фиг. 4A.
Более точно, на диаграмме 600a, мгновенное измерение уровня, выдаваемое датчиком уровня текучей среды для отработавших газов показано на графике 602, а фильтрованный выходной сигнал на основании фильтра нижних частот, конфигурируемого на основании качества сигнала и дисперсии мгновенного уровня, показан на графике 604. Диаграмма 600a начерчена с измерениями уровня (в миллиметрах) вдоль оси y и временем вдоль оси x. Затем, на диаграмме 600b, качество отраженного сигнала (то есть, амплитуда отраженного сигнала, принятого датчиком уровня текучей среды) показано на графике 606, а калибруемое пороговое значение качества, ниже которого качество сигнала может считаться ненадежным, показано на графике 608. Диаграмма 600b начерчена с амплитудой отраженного сигнала, принятого датчиком текучей среды для отработавших газов, вдоль оси y и временем вдоль оси x. Диаграмма 600c показывает дисперсию мгновенного измерения уровня (на основании параметра N=5, где N - количество отсчетов) на графике 610. Диаграмма 600c начерчена с дисперсией уровня (в миллиметрах2) по оси y и временем по оси x.
До t1, бачок может быть не наклонен. Другими словами, поверхность жидкости для отработавших газов может быть параллельна верхней и нижней поверхности бачка для хранения текучей среды для отработавших газов. Поэтому, амплитуда отраженного сигнала (график 606) может быть выше, чем пороговое значение 608, а дисперсия мгновенного измерения уровня может быть низкой (график 610). Вследствие высокого качества отраженного сигнала и низкой дисперсии, может быть реализована более короткая постоянная времени фильтра. Выходной сигнал фильтра (604) и мгновенное измерение уровня (602) могут быть согласованными, без больших отклонений.
Затем, в t1, бачок может наклоняться от датчика, а впоследствии, между t1 и t2, бачок может продолжать быть наклоненным от датчика. Вследствие наклона бачка, амплитуда сигнала уменьшается (606) и, в определенные моменты времени) во время наклона, амплитуда сигнала может убывать ниже порогового значения 608. В течение тех моментов времени, когда амплитуда сигнала падает ниже порогового значения, фильтрованный уровень может не обновляться в контроллере. Данные амплитуды сигнала, когда амплитуда сигнала находится ниже порогового значения, удалены с диаграммы и могут быть видны в качестве разрывов на графике 606 амплитуды сигнала. В другие моменты времени во время наклона, когда амплитуда сигнала не находится ниже порогового значения, может быть реализована более длинная постоянная времени вследствие более высокой дисперсии (график 610) и более низкого качества сигнала (график 606). Как результат, фильтру может требоваться большее время, чтобы реагировать на большие отклонения, а отсюда, может быть видно постепенное падение фильтрованного уровня (604). Более длинная постоянная времени полезна при выполнении измерений уровня в течение периодов наклона, всплескивания и/или вибраций, и т.д., поскольку она отфильтровывает большие отклонения и замедляет фильтрованный выходной сигнал, тем самым, давая более точные измерения уровня. Кроме того, калибруемое пороговое значение 608 может настраиваться, из условия чтобы умеренно низкие амплитуды сигнала могли не игнорироваться, для того чтобы быть способным выявлять дозаправку или утечку бачка при умеренных наклонах.
Затем, в t2, бачок может возвращаться обратно в горизонтальное положение и может продолжать быть на уровне (то есть, не наклонным) между t2 и t3. Следовательно, амплитуда сигнала (график 606) может быть более высокой, чем пороговое значение 608 (отсюда, надежный сигнал), а дисперсия может быть низкой (график 610). Вследствие более высокого качества сигнала и меньших отклонений, может быть реализована более короткая постоянная времени фильтра нижних частот. Как результат, фильтр может быстрее реагировать на мгновенные измерения уровня, а мгновенные измерения уровня (602) и фильтрованный выходной сигнал (604) могут быть согласованными.
В t3, вследствие изменений условий эксплуатации транспортного средства, бачок может быть наклонен к датчику. Бачок может продолжать оставаться в наклонном положении между t3 и t4. Вследствие наклона, могут быть большие отклонения мгновенных измерений уровня (график 602), а следовательно, дисперсия может быть выше (график 610). Кроме того, качество сигнала (график 606) может быть низким (иногда ниже порогового значения 608). Следовательно, вследствие более высокой дисперсии и более низкого качества сигнала, может быть реализован более длинная постоянная времени фильтра нижних частот, и фильтрованный выходной сигнал (график 604) может указывать медленное возрастание измерения уровня. Однако, вследствие отфильтровывания больших отклонений и медленной реакции фильтра, фильтрованные измерения уровня (график 604) могут оставаться близкими к фактическому уровню.
Затем, в моменты времени между t4 и t5, между t6 и t7, в t8 и после t8, наклон бачка может устраняться, и бачок может выравниваться. Как обсуждено выше, на основании более высококачественного сигнала (график 606) и более низкой дисперсии (график 610) мгновенных измерений уровня, когда бачок не наклонен, может быть реализована более короткая постоянная фильтра нижних частот. Следовательно, реакция фильтра может быть более быстрой, а мгновенные измерения уровня (602) и фильтрованный выходной сигнал (604) могут быть совместимыми.
В t5, и между t5 и t6, бачок может быть наклонен в сторону. В этом случае, качество сигнала может быть низким (график 606), а дисперсия мгновенного измерения может быть низкой (график 610). Вследствие низкого качества отраженного сигнала (график 606), может быть реализована более длинная постоянная времени фильтра и, как обсуждено выше, фильтрованный выходной сигнал (график 604) может не отклоняться в значительной степени от фактического уровня текучей среды.
Затем, начиная с t7 и между t7 и t8, бачок может испытывать всплескивание. Следовательно, мгновенные измерения уровня показывают большие отклонения, как указано на графике 602 и на графике 610, и качество отраженного сигнала может быть низким (с некоторыми амплитудами сигнала, находящимися ниже порогового значения). Подобно условиям наклона, во время всплескивания, вследствие высокой дисперсии мгновенных измерений и низкого качества отраженного сигнала, более длинная постоянная времени фильтра может быть реализована, чтобы отфильтровывать большие отклонения и замедлять реакцию фильтра. Как результат, фильтрованный выходной сигнал (график 604) может не находиться в большой степени под влиянием больших отклонений, и может указывать измерения уровня, близкие к фактическому уровню текучей среды для отработавших газов в бачке.
Таким образом, посредством пропускания мгновенных измерений уровня с датчика уровня через фильтр нижних частот, могут получаться измерения уровня текучей среды для отработавших газов. Посредством конфигурирования постоянной времени фильтра нижних частот на основании качества отраженного сигнала и дисперсии мгновенного измерения уровня, могут получаться более точные измерения уровня.
Фиг. 7 показывает примерные сигналы, представляющие примерные формы сигнала, вырабатываемые датчиком уровня, в том числе, форму сигнала, отправляемую датчиком в направлении поверхности текучей среды, на верхнем графике, и принимаемую форму сигнала, которая отражается обратно, на нижнем графике. Кроме того, примерные разновременности (Δt) показаны с разными пиковыми амплитудами (p). Как проиллюстрировано, одна и та же форма сигнала, сформированная датчиком, может иметь разные отражения в зависимости от условий, таких как вследствие колыханий и/или наклона бачка. Например, на отсчетах 1, 2 и 3, бачок/транспортное средство может быть горизонтальным, тогда как на отсчетах n, n+1, и т.д., бачок/транспортное средство могут быть наклонены вперед, а на отсчетах m, m+1, и т.д., бачок/транспортное средство могут быть наклонены назад или в сторону. Таким образом, графики иллюстрируют различную природу разных параметров Δt и p.
Отметим, что примерные процедуры управления, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия могут графически представлять код, который должен быть запрограммирован на машинно-читаемый запоминающий носитель в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Кроме того, одна или более различных конфигураций системы могут использоваться в комбинации с одной или более описанных диагностических процедур. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
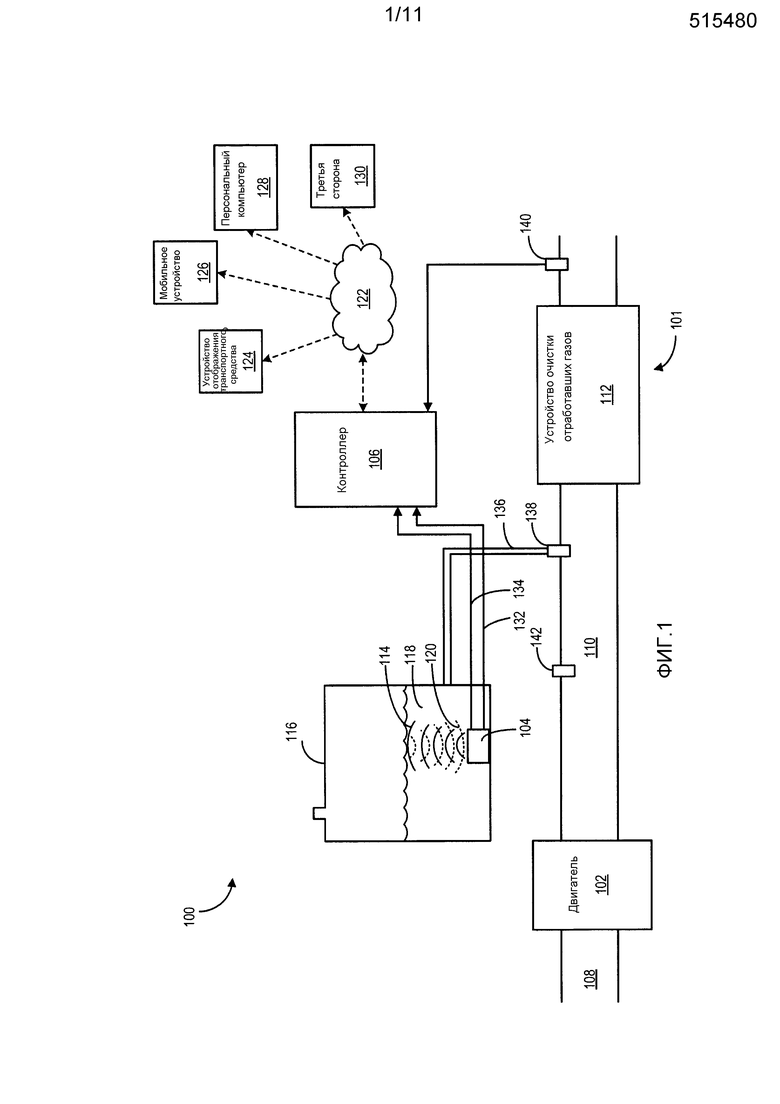
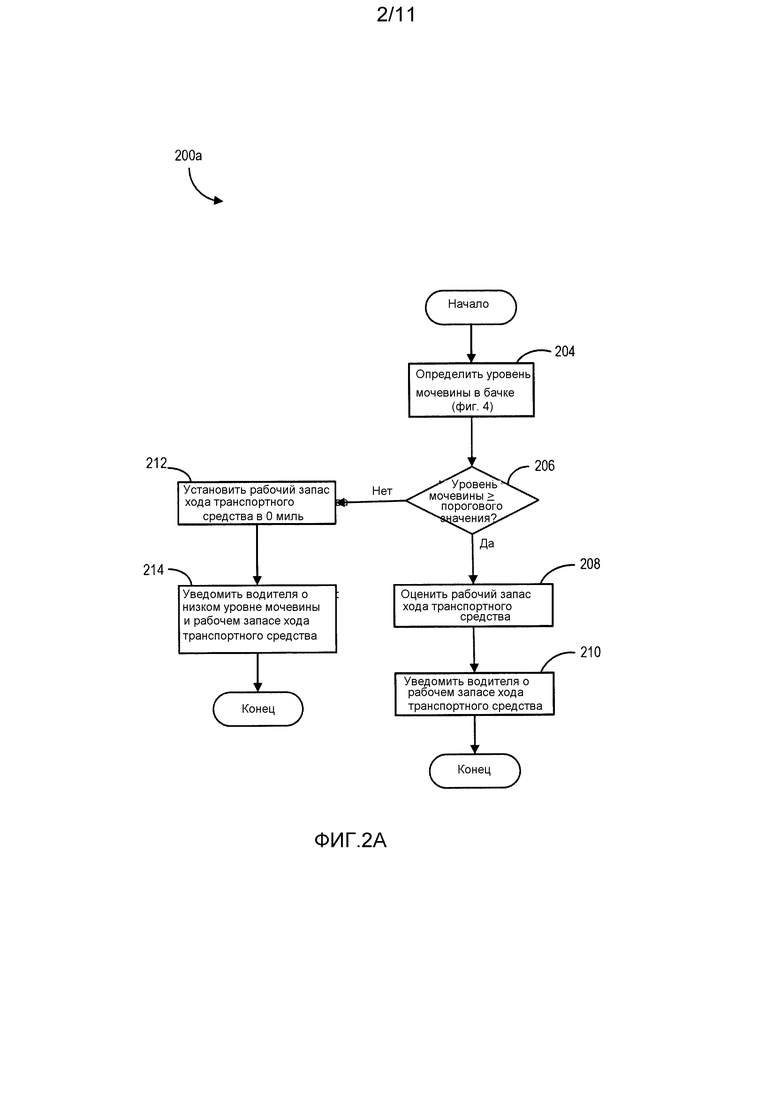
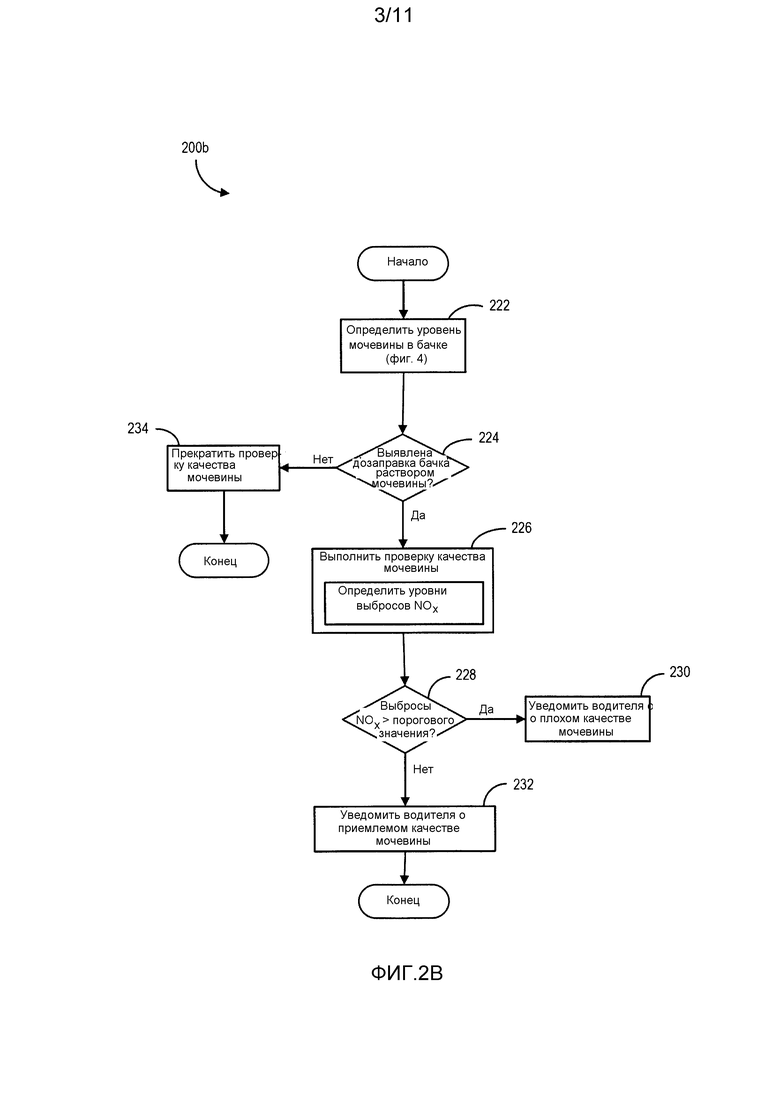
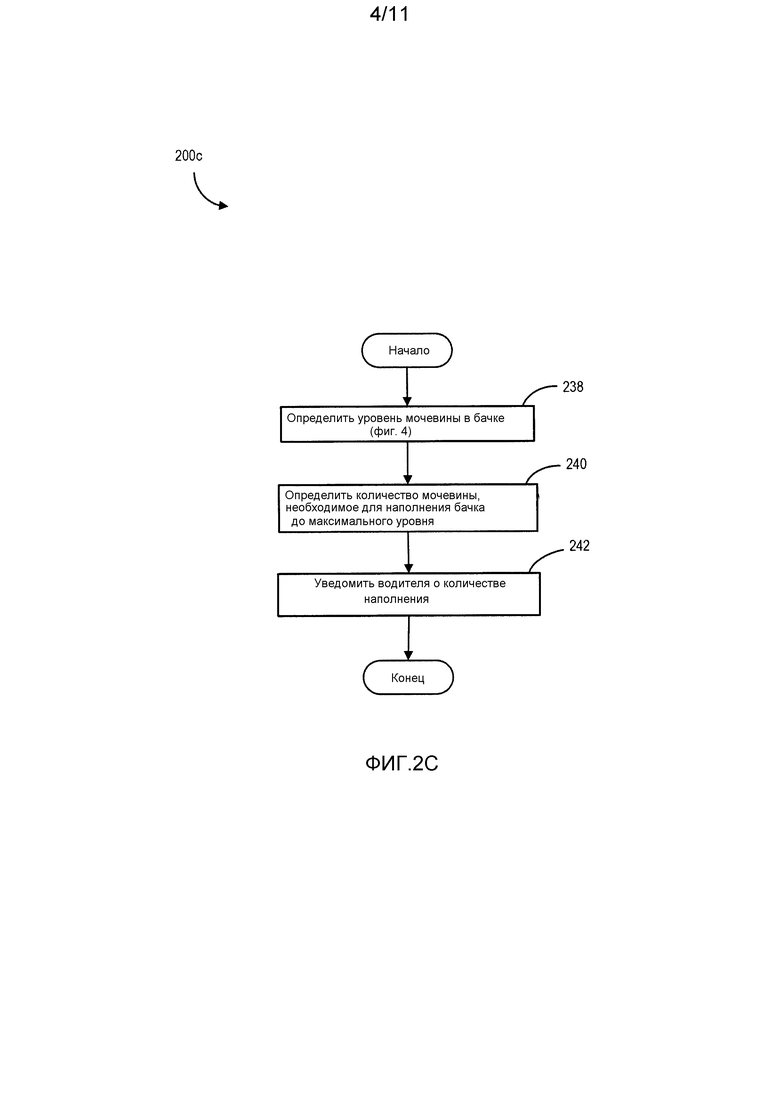
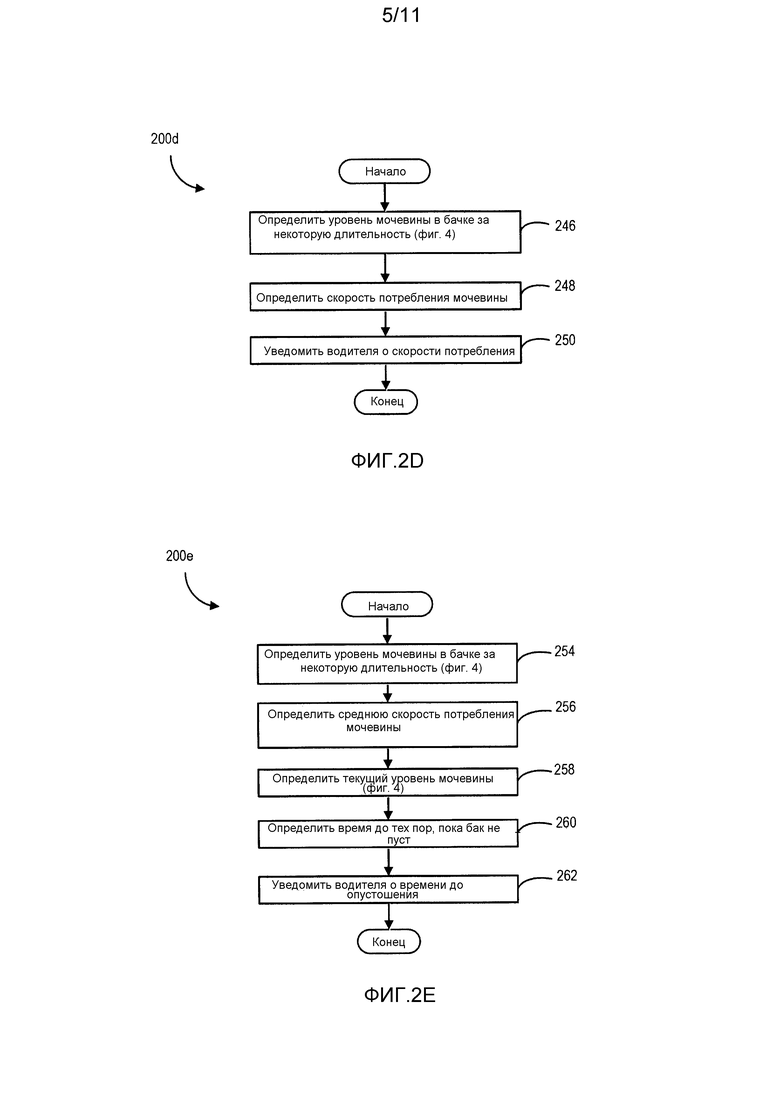
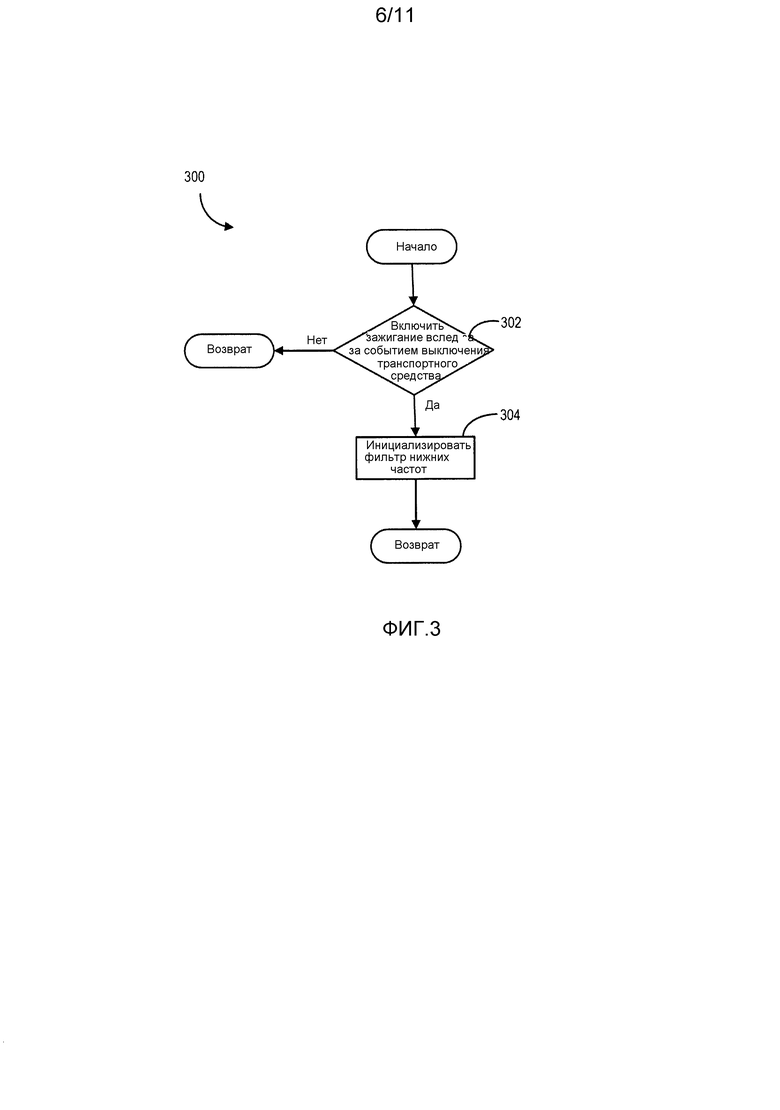
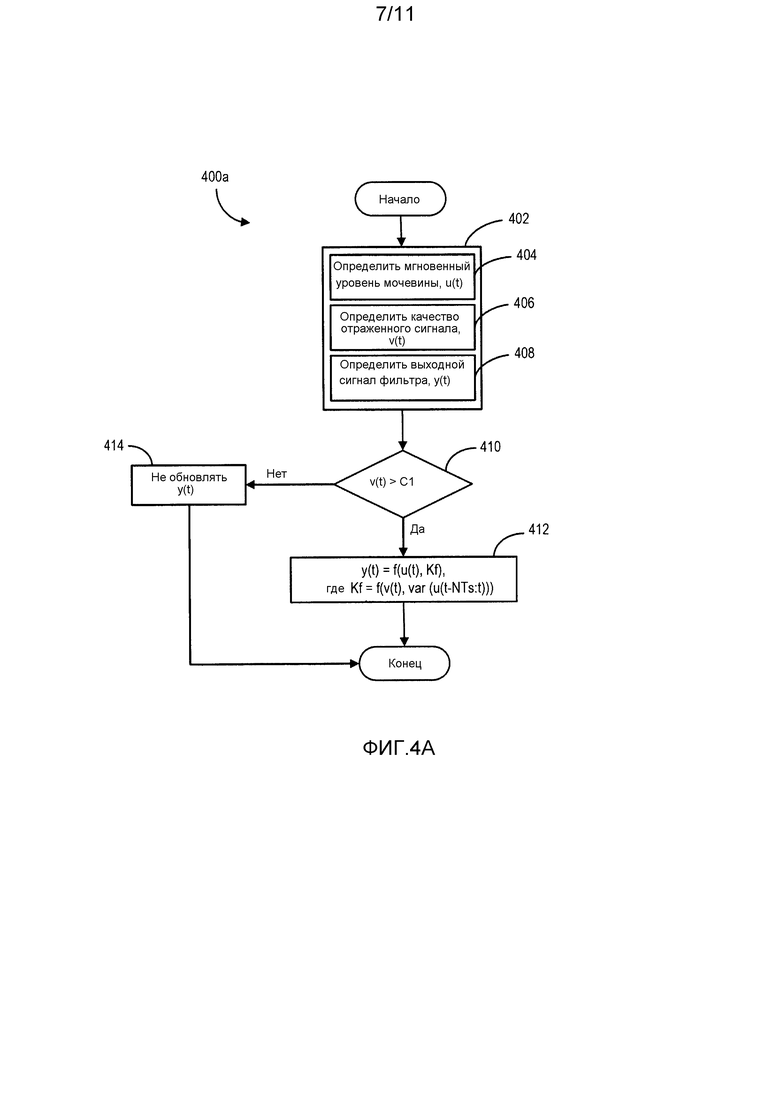
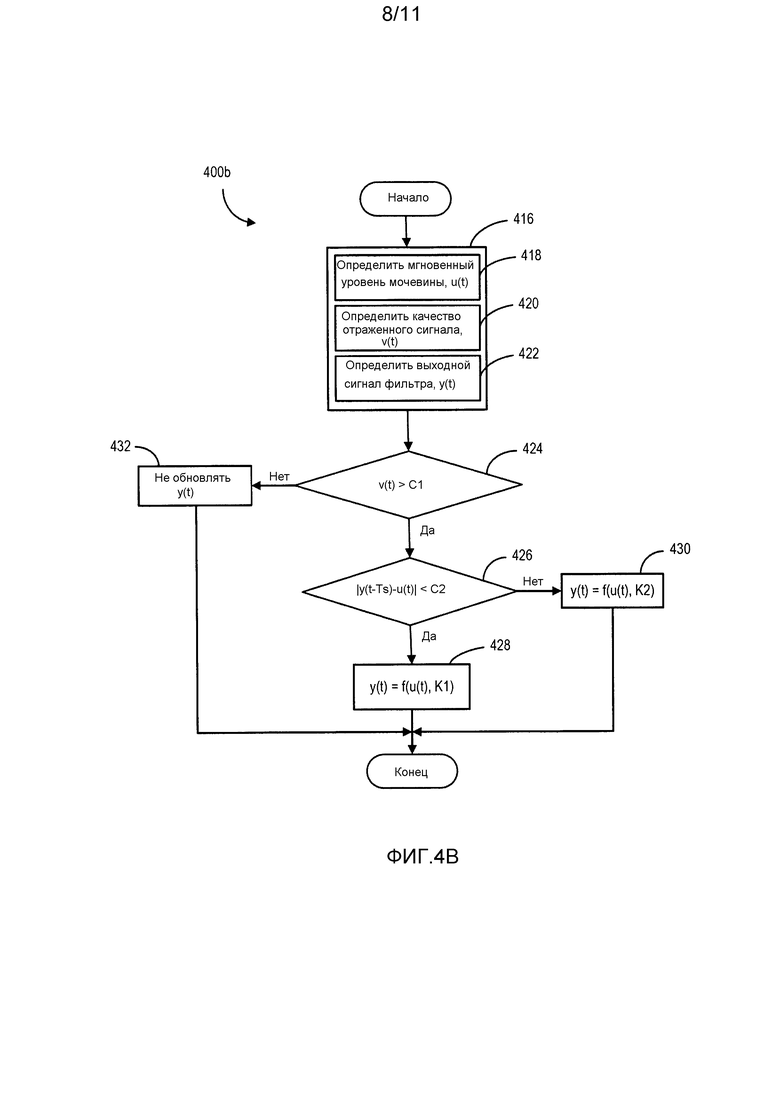
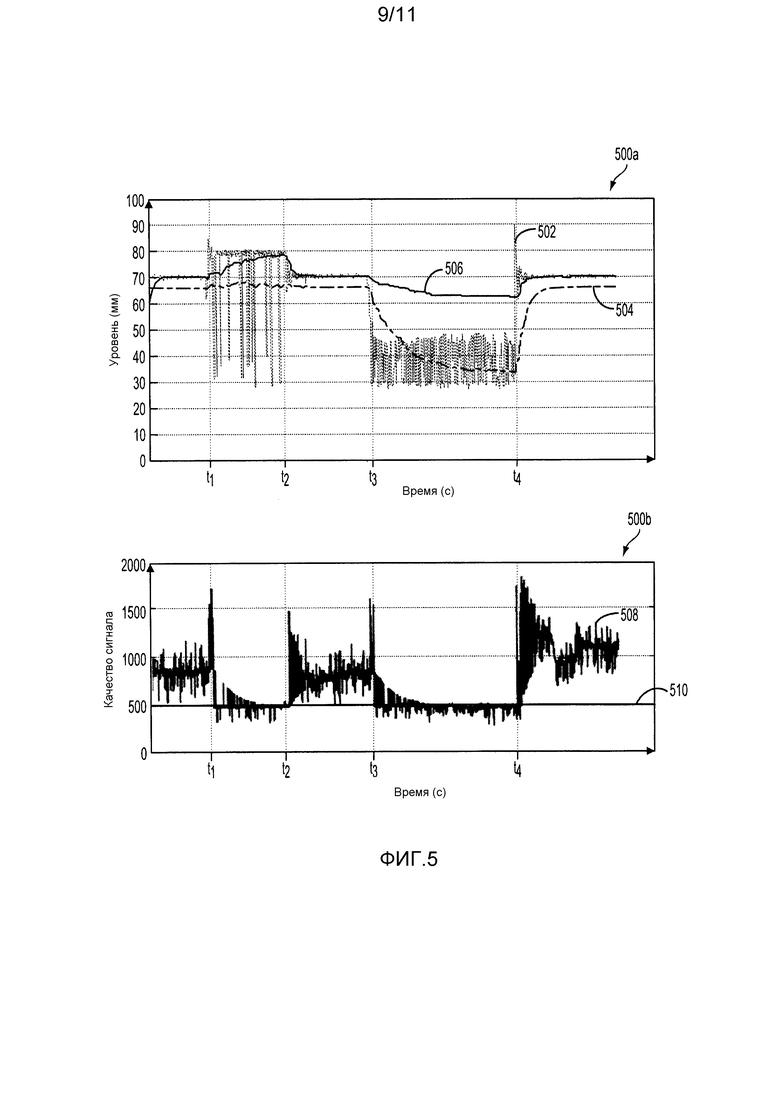
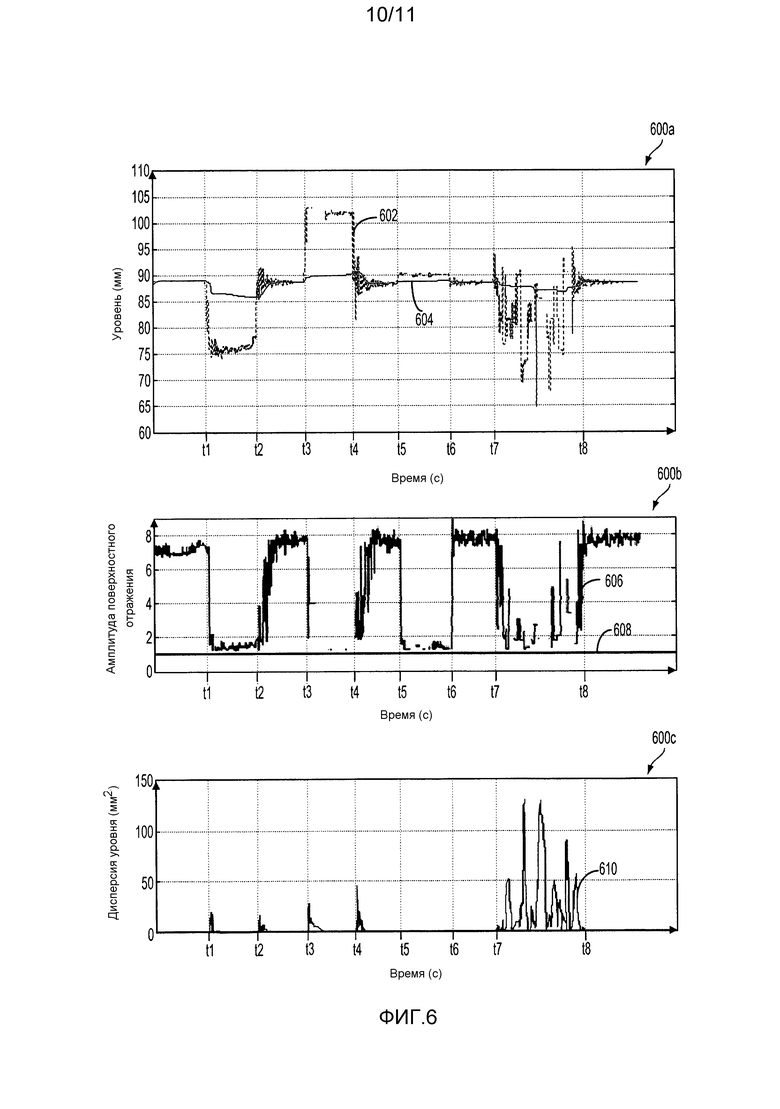
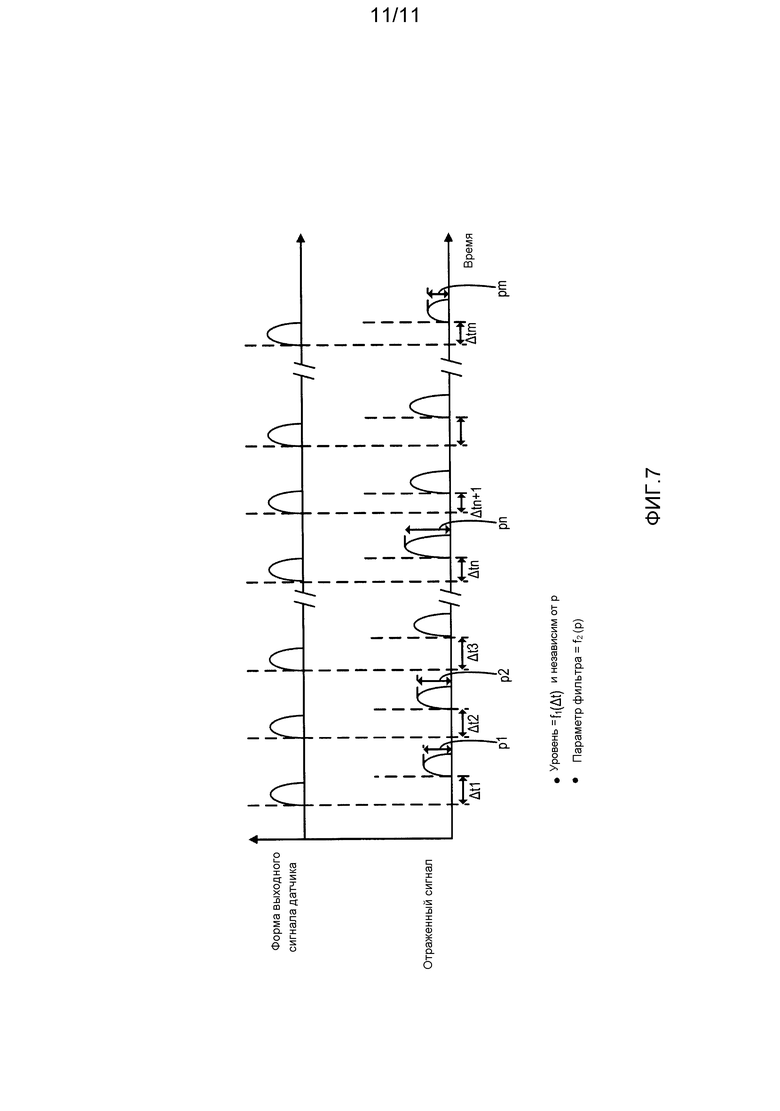
Предложенная группа изобретений относится к способам для оценки уровней текучей среды для отработанных газов в бачке для хранения данной текучей среды посредством ультразвукового датчика уровня. Способ управления двигателем транспортного средства заключается в том, что: вырабатывают ультразвуковой сигнал в бачке для текучей среды для отработавших газов транспортного средства; в ответ на интенсивность принятой отраженной волны ультразвукового сигнала, которая больше, чем пороговое значение, фильтруют упомянутую отраженную волну на основании дисперсии принятой отраженной волны и указывают уровень текучей среды на основании фильтрованной отраженной волны; в остальных случаях не фильтруют упомянутую отраженную волну и сохраняют указание предыдущего самого последнего уровня текучей среды; и ограничивают выходную мощность двигателя транспортного средства на основании указания уровня, при этом уровень текучей среды дополнительно основан на сдвиге по времени отраженного ультразвукового сигнала, и при этом упомянутая дисперсия является дисперсией мгновенных измерений уровня на последних N отсчетах, где N является количеством отсчетов, причем упомянутая дисперсия является мерой отклонения принятой отраженной волны от предопределенного количества отраженных волн, принятых до упомянутой принятой отраженной волны, причем упомянутую дисперсию определяют на основании функции плотности распределения вероятности при условии случайного распределения принятых отраженных волн. Также реализовано еще два варианта данного способа. Предложенные изобретения позволяют своевременно сделать вывод о качестве используемой текучей среды. 3 н. и 14 з.п. ф-лы, 7 ил.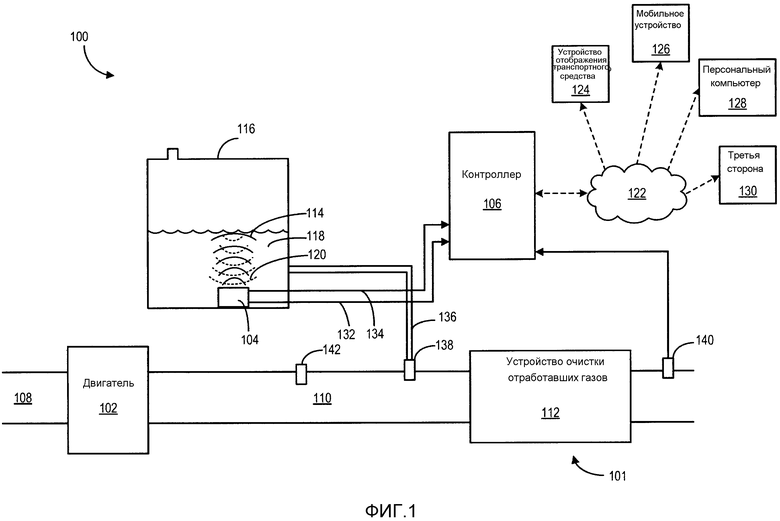
1. Способ управления двигателем транспортного средства, состоящий в том, что:
вырабатывают ультразвуковой сигнал в бачке для текучей среды для отработавших газов транспортного средства;
в ответ на интенсивность принятой отраженной волны ультразвукового сигнала, которая больше, чем пороговое значение, фильтруют упомянутую отраженную волну на основании дисперсии принятой отраженной волны и указывают уровень текучей среды на основании фильтрованной отраженной волны; в остальных случаях не фильтруют упомянутую отраженную волну и сохраняют указание предыдущего самого последнего уровня текучей среды и
ограничивают выходную мощность двигателя транспортного средства на основании указания уровня, и
при этом уровень текучей среды дополнительно основан на сдвиге по времени отраженного ультразвукового сигнала, и при этом упомянутая дисперсия является дисперсией мгновенных измерений уровня на последних N отсчетах, где N является количеством отсчетов, причем упомянутая дисперсия является мерой отклонения принятой отраженной волны от предопределенного количества отраженных волн, принятых до упомянутой принятой отраженной волны, причем упомянутую дисперсию определяют на основании функции плотности распределения вероятности при условии случайного распределения принятых отраженных волн.
2. Способ по п. 1, в котором упомянутая интенсивность основана на амплитуде напряжения отраженного ультразвукового сигнала в приемнике, при этом отраженная волна фильтруется разностным фильтром, имеющим параметр, основанный на упомянутой интенсивности.
3. Способ по п. 2, в котором разностный фильтр дополнительно основан на дисперсии отраженной волны, и при этом фильтрация отраженной волны на основании упомянутой дисперсии содержит этапы, на которых: применяют более длинную постоянную времени для разностного фильтра для более высоких дисперсий и применяют более короткую постоянную времени для разностного фильтра для более низких дисперсий.
4. Способ по п. 3, в котором текучая среда для отработавших газов включает в себя мочевину, и при этом разностный фильтр дополнительно основан на ускорении транспортного средства.
5. Способ по п. 2, в котором текучая среда для отработавших газов включает в себя аммиак, и при этом постоянная времени для разностного фильтра основана на абсолютной разности между предыдущим самым последним уровнем текучей среды, указанным предыдущим самым последним фильтрованным выходным сигналом, и уровнем текучей среды, указанным посредством сдвига по времени принятой отраженной волны, при этом более короткую постоянную времени применяют, когда упомянутая абсолютная разность меньше, чем пороговая разность, в остальных случаях применяют более длинную постоянную времени.
6. Способ по п. 1, дополнительно состоящий в том, что указывают ухудшение качества мочевины на основании указанного уровня текучей среды, определяют рабочий запас хода транспортного средства на основании указанного уровня текучей среды и уведомляют водителя транспортного средства об упомянутом рабочем запасе хода.
7. Способ по п. 1, в котором упомянутая интенсивность основана на относительной амплитуде напряжения отраженного сигнала по отношению к амплитуде выработанного ультразвукового сигнала и который дополнительно состоит в том, что указывают более низкую интенсивность по мере того, как понижается относительная амплитуда напряжения.
8. Способ управления двигателем транспортного средства, состоящий в том, что:
формируют указание уровня текучей среды для отработавших газов в бачке для хранения текучей среды для отработавших газов с помощью разновременности акустического волнового сигнала, отраженного от поверхности текучей среды для отработавших газов;
используют упомянутое указание уровня в качестве входного сигнала в фильтр нижних частот, только когда пиковая амплитуда напряжения отраженного акустического волнового сигнала является большей, чем пороговое значение, но продолжают формировать выходной сигнал фильтра на основании предыдущих указаний уровня;
указывают ухудшение качества мочевины на основании упомянутого указания уровня и
ограничивают выходную мощность двигателя на основании упомянутого указания уровня,
при этом постоянная времени фильтра нижних частот для фильтра нижних частот основана на дисперсии упомянутого указания уровня,
при этом упомянутая дисперсия является мерой отклонения упомянутого указания уровня от предопределенного количества предыдущих указаний уровня, и
при этом упомянутая дисперсия является дисперсией мгновенных измерений уровня на последних N отсчетах, где N является количеством отсчетов, причем упомянутую дисперсию определяют на основании функции плотности распределения вероятности при условии случайного распределения отсчетов.
9. Способ по п. 8, в котором постоянная времени фильтра нижних частот для фильтра нижних частот дополнительно основана на пиковой амплитуде напряжения отраженного акустического волнового сигнала.
10. Способ по п. 9, в котором текучая среда для отработавших газов включает в себя мочевину.
11. Способ по п. 10, в котором текучая среда для отработавших газов включает в себя аммиак, и при этом, если упомянутая дисперсия ниже порогового значения, применяют более короткую постоянную времени для фильтра нижних частот, а в остальных случаях применяют более длинную постоянную времени.
12. Способ управления двигателем транспортного средства, состоящий в том, что:
в контроллере, расположенном в транспортном средстве, принимают первый сигнал с ультразвукового датчика текучей среды для отработавших газов, расположенного в бачке, присоединенном к форсунке в выпуске двигателя транспортного средства, указывающий уровень текучей среды, принимают второй сигнал с упомянутого датчика, указывающий интенсивность отражения ультразвуковой волны, формируют фильтрованный уровень посредством того, что фильтруют первый сигнал, только когда второй сигнал является большим, чем пороговое значение, и ограничивают выходную мощность двигателя на основании фильтрованного уровня, а в остальных случаях поддерживают предыдущий фильтрованный уровень и ограничивают выходную мощность двигателя на основании предыдущего фильтрованного уровня, причем фильтрация включает в себя применение более короткой постоянной времени для фильтрации нижних частот для меньшей дисперсии уровня текучей средыи применение более длинной постоянной времени для фильтрации нижних частот для большей дисперсии уровня текучей среды, при этом дисперсия уровня текучей среды является мерой отклонения упомянутого указания уровня от предопределенного количества предыдущих указаний уровня, при этом дисперсия уровня текучей среды является дисперсией мгновенных измерений уровня на последних N отсчетах, где N является количеством отсчетов, причем дисперсию уровня текучей среды определяют на основании функции плотности распределения вероятности при условии случайного распределения отсчетов.
13. Способ по п. 12, в котором упомянутая форсунка расположена выше по потоку от устройства снижения токсичности выбросов SCR в выпуске двигателя.
14. Способ по п. 12, в котором интенсивность основана на пиковой амплитуде второго сигнала, причем второй сигнал отличен от первого сигнала, принимаемого параллельно в контроллере со вторым сигналом.
15. Способ по п. 14, в котором ультразвуковая волна вырабатывается на выбранной частоте.
16. Способ по п. 15, в котором первый сигнал основан на разновременности между тем, когда упомянутый датчик вырабатывает ультразвуковую волну, и тем, когда упомянутый датчик принимает отражение ультразвуковой волны.
17. Способ по п. 13, дополнительно состоящий в том, что определяют рабочий запас хода транспортного средства в контроллере на основании упомянутого фильтрованного уровня, когда второй сигнал больше, чем пороговое значение, и уведомляют водителя транспортного средства об упомянутом рабочем запасе хода.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| DE 102010035008 A1, 23.02.2012 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 8117834 B2, 18.02.2010. | |||

