ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в общем, относится к носимым вычислительным устройствам виртуальной реальности (ВР), содержащим шлем виртуальной реальности (ШВР). Более конкретно, настоящее изобретение относится к прерыванию операций в поле зрения в ШВР и использованию недвижимости, находящейся вне поля зрения недвижимости в ШВР.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Носимые системы ВР содержат различные элементы, такие как устройства ввода, датчики, детекторы, дисплеи изображений и беспроводные средства связи, также как и видео, и аудиопроцессоры. Размещая элементы отображения изображения близко к глазам пользователя, искусственное изображение может накладываться на изображение реального мира или создавать свою собственную независимую реальность. Такие элементы отображения изображения объединены в системы, также упоминаемые как шлемы виртуальной реальности (ШВР). В зависимости от размера элемента отображения и расстояния к глазам пользователя искусственные изображения, отображаемые на дисплее, могут заполнять или почти заполнять поле зрения пользователя.
Системы ВР, содержащие ШВР, мобильны и обладают малым весом, в то же время позволяя коммуникацию и взаимодействие с виртуальной средой. Однако такие системы, в общем, обладают недостатками, поскольку они по-прежнему нуждаются в использовании независимого контроллера для навигации в виртуальной среде. В этом смысле, большинство ШВР немногим более, чем очки, предоставляющие вход в среду ВР. Существует необходимость в данной области техники в навигации и управлении средой ВР без внедрения независимого управляющего устройства, особенно по отношению к операциям прерывания окружающей среды естественным и ненавязчивым способом. Также существует дополнительная необходимость наилучшим образом использовать "недвижимость", находящуюся вне поля зрения в этой среде ВР.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты реализации настоящего изобретения включают системы и способы прерывания виртуальной среды в шлеме виртуальной реальности. Информация о по меньшей мере одной настройке управления, которая связывает функцию с изменением положения шлема виртуальной реальности, может сохраняться. Шлем виртуальной реальности может быть откалиброван для определения начального положения. Могут генерироваться данные позиционирования, которые отслеживают движение шлема виртуальной реальности. Текущее положение шлема виртуальной реальности может определяться так, чтобы указывать на изменение начального положения настолько, что превышено изменение положения, установленного настройкой управления. Затем может быть выполнена функция, связанная с указанной настройкой управления, которая может включать прерывание виртуальной среды в шлеме виртуальной реальности при помощи приостанавливания указанной среды.
Способ для прерывания виртуальной среды в шлеме виртуальной реальности представлен в формуле изобретения. Такие способы могут включать сохранение информации о по меньшей мере одной настройке управления, которая связывает функцию с изменением положения шлема виртуальной реальности, калибровку шлема виртуальной реальности для определения начального положения, генерирование данных позиционирования, отслеживающих движение шлема виртуальной реальности, определение того, что текущее положение шлема виртуальной реальности свидетельствует об изменении начального положения настолько, что превышено изменение положения, установленное настройкой управления, и выполнение функции, связанной с настройкой управления, причем функция содержит прерывание виртуальной среды в шлеме виртуальной реальности приостанавливанием указанной среды.
Дополнительные варианты реализации включают системы прерывания виртуальной среды в шлеме виртуальной реальности. Такие системы могут содержать запоминающее устройство, хранящее информацию о по меньшей мере одной настройке управления, которая связывает функцию с изменением положения шлема виртуальной реальности, по меньшей мере один гироскоп, магнитометр и акселерометр, которые калибруют шлем виртуальной реальности, причем определяют начальное положение шлема виртуальной реальности и генерируют данные позиционирования, которые отслеживают движение шлема виртуальной реальности, процессор, который выполняет команды, хранящиеся в памяти для определения того, что текущее положение шлема виртуальной реальности свидетельствует об изменении начального положения настолько, что превышено изменение положения, установленное настройкой управления, и для выполнения функции, связанной с настройкой управления, и шлем виртуальной реальности, содержащий по меньшей мере один дисплей для отображения виртуальной среды, причем выполнение функции прерывает указанную среду, приостанавливая указанную среду.
Варианты реализации настоящего изобретения могут дополнительно включать энергонезависимый машиночитаемый носитель данных, содержащий встроенную в него программу, выполняемую процессором, для реализации способов прерывания виртуальной среды в шлеме виртуальной реальности, как описано в данном документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
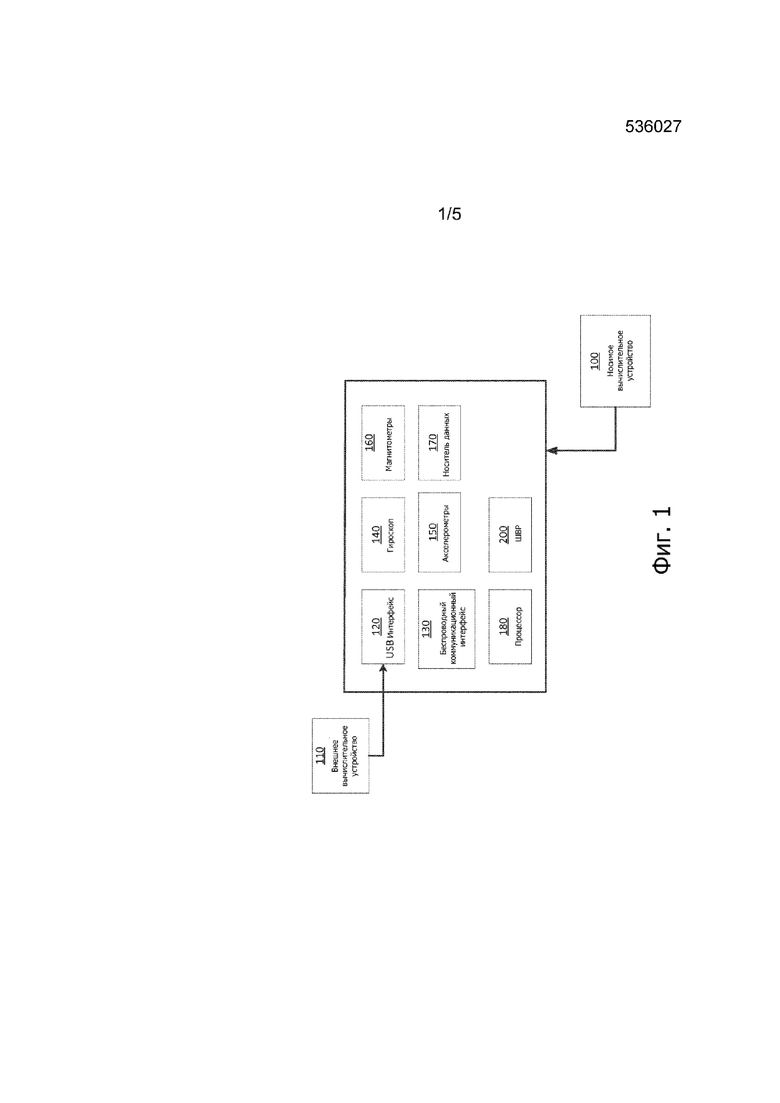
Фиг. 1 иллюстрирует блок-схему примерного носимого вычислительного устройства.
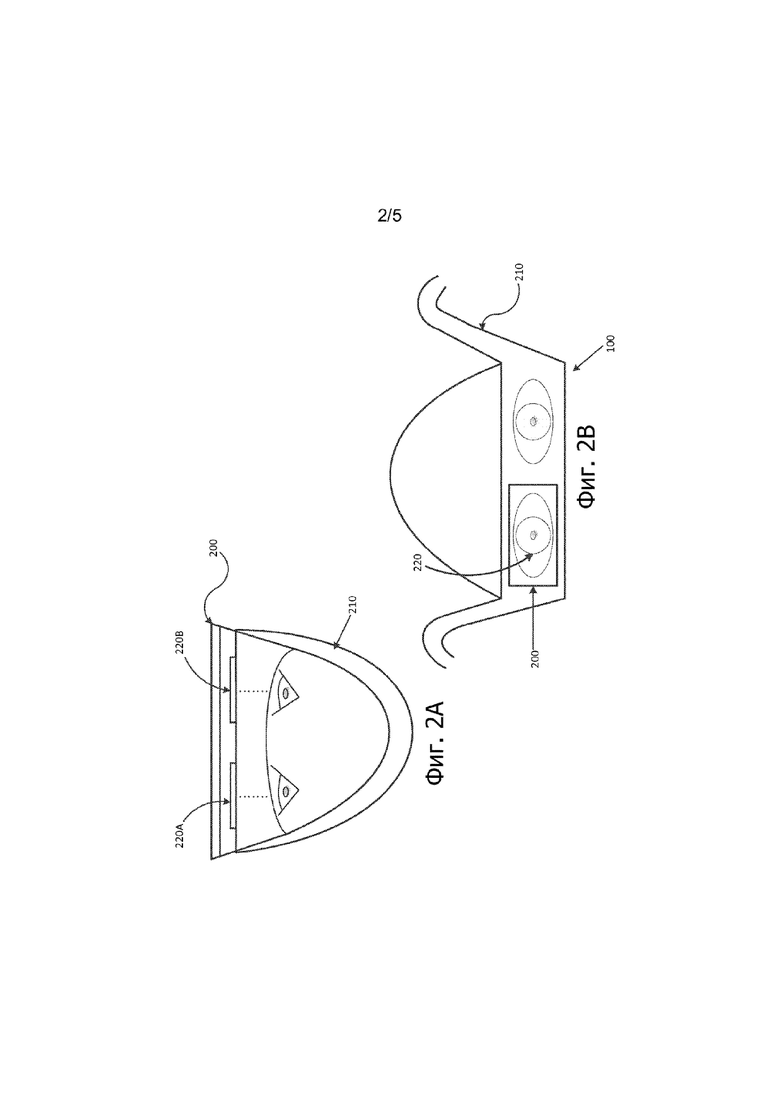
Фиг. 2А иллюстрирует ШВР, который полностью погружает пользователя в среду виртуальной реальности.
Фиг. 2В иллюстрирует ШВР, который позволяет генерирование информации ВР, в то же время допуская восприятие реального мира.
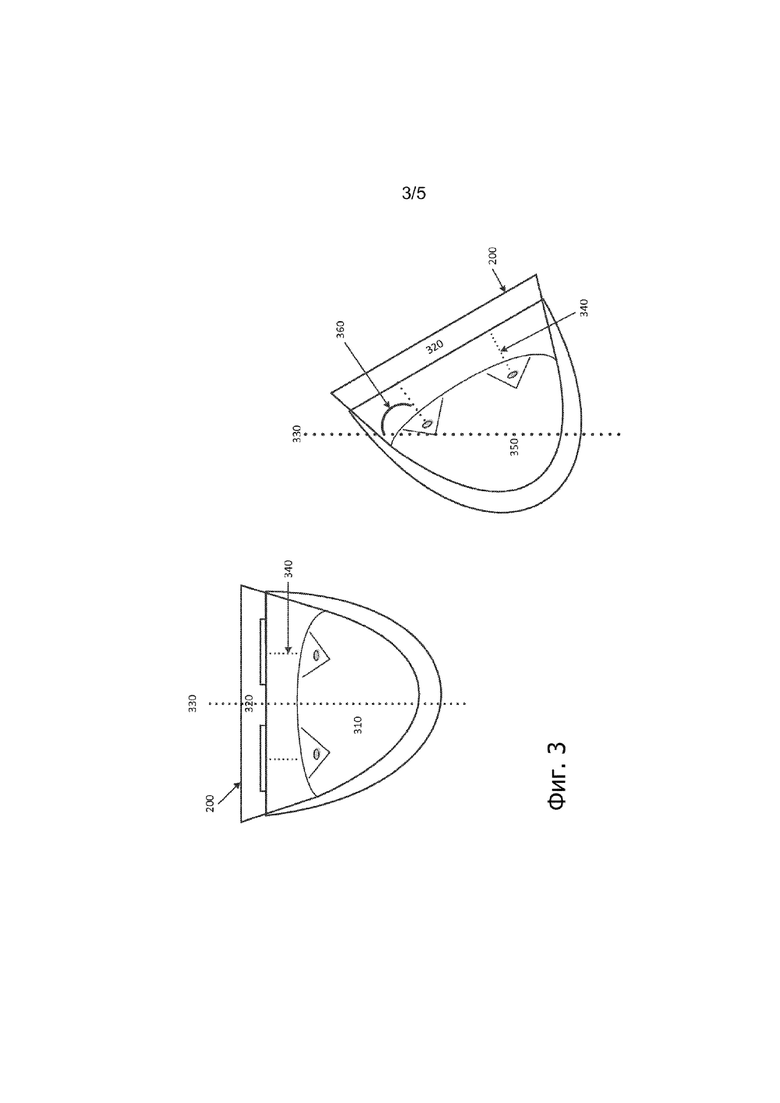
Фиг. 3 иллюстрирует примерный вариант реализации прерывания среды ВР.
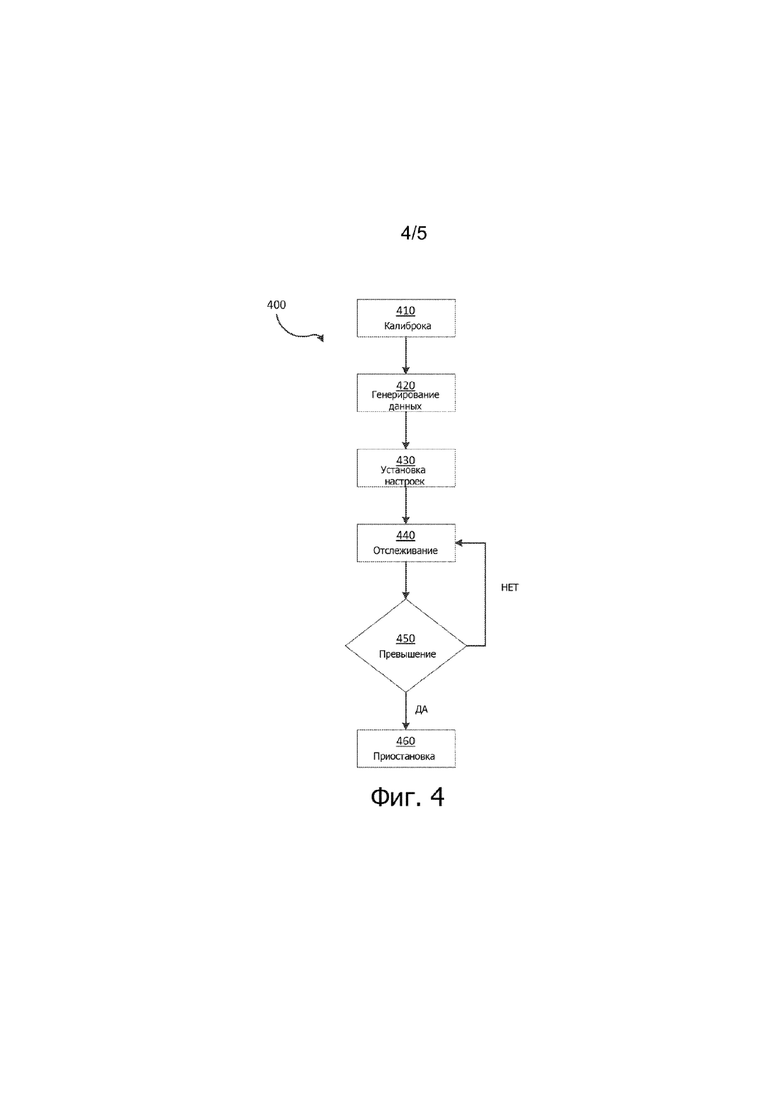
Фиг. 4 иллюстрирует способ реализации прерывания окружающей среды ВР.
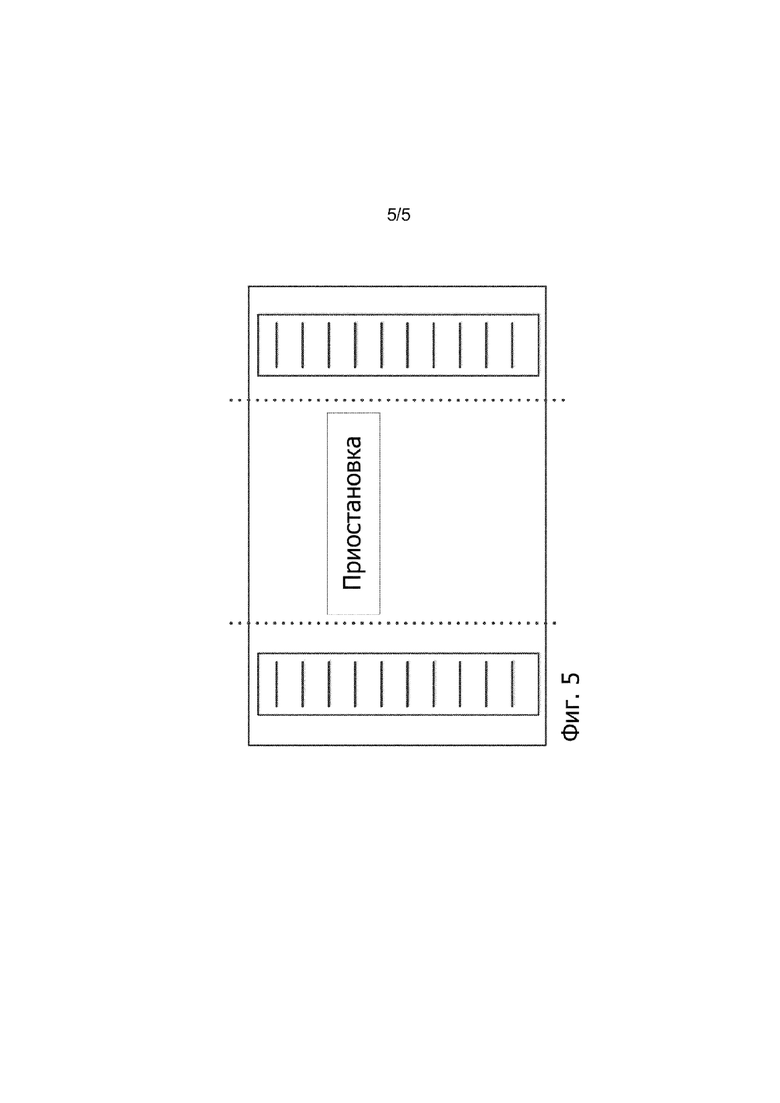
Фиг. 5 иллюстрирует использование недвижимости, находящейся в не поля зрения, для предоставления информации дополнительно к среде ВР.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Варианты реализации настоящего изобретения включают системы и способы прерывания виртуальной среды в шлеме виртуальной реальности. Информация о по меньшей мере одной настройке управления, которая связывает функцию с изменением положения шлема виртуальной реальности, может сохраняться. Шлем виртуальной реальности может быть откалиброван для определения начального положения. Могут генерироваться данные позиционирования, которые отслеживают движение шлема виртуальной реальности. Текущее положение шлема виртуальной реальности может определяться так, чтобы указывать на изменение начального положения настолько, что превышено изменение положения, установленное настройкой управления. Затем может быть выполнена функция, связанная с указанной настройкой управления, которая может включать прерывание виртуальной среды в шлеме виртуальной реальности при помощи приостанавливания указанной среды.
Фиг. 1 иллюстрирует блок-схему примерной носимой системы виртуальной реальности 100. Будучи связанной с внешним вычислительным устройством 110, носимая система виртуальной реальности 100 может содержать USB интерфейс 120, беспроводный коммуникационный интерфейс 130, гироскоп 140, акселерометр 150, магнитометр 160, носитель данных 170, процессор 180 и шлем виртуальной реальности (ШВР) 200.
Шлем виртуальной реальности (ШВР) 200 позволяет его пользователю наблюдать окружающий реальный мир, демонстрируемое генерируемое компьютером изображение или комбинацию обоих. В некоторых вариантах реализации изобретения ШВР 200 может содержать прозрачный дисплей. Пользователь носимой системы виртуальной реальности 100 может иметь возможность смотреть сквозь ШВР 200 в таком варианте реализации изобретения и наблюдать часть среды реального мира, не смотря на присутствие носимой системы виртуальной реальности 100. В дополнительном варианте реализации изобретения ШВР 200 может использоваться для демонстрации изображений, налагаемых на поле зрения для обеспечения впечатления "искусственной реальности". Некоторые из изображений, демонстрируемые ШВР 200, могут накладываться или появляться в связке с конкретными объектами в поле зрения. В еще одном дополнительном варианте реализации изобретения, ШВР 200 может быть полностью виртуальной средой, в которой пользователь носимой системы виртуальной реальности 100 изолирован от любого визуального контакта с реальным миром.
Демонстрируемое изображение может содержать графику, текст и/или видео; звук может предоставляться посредством соответствующего аудиоустройства. Изображения, демонстрируемые ШВР, могут быть частью интерактивного пользовательского интерфейса и содержать меню, поля выбора, навигационные иконки или другие детали пользовательского интерфейса, которые предоставляют пользователю возможность запускать функции носимого вычислительного устройства или другого взаимодействия с носимым вычислительным устройством. Форм-фактор ШВР 200 может быть выполнен в виде очков, закрытых очков, шлема, шапки, маски, головных наушников или в некоторой другой форме, которая может держаться на или от головы пользователя.
Для демонстрации виртуального изображения пользователю ШВР может содержать оптическую систему с источником света, таким как светодиод (LED), освещающего демонстрационную панель. Демонстрационная панель может включать жидкокристаллическую дисплейную панель (LCD). Дисплейная панель может генерировать световые шаблоны, пространственно модулируя свет из источника света, и формирователь изображения формирует виртуальное изображение из светового шаблона. Альтернативно, панель может быть жидким кристаллом на кремнии (LCOS), в котором слой жидких кристаллов может располагаться на верху кремниевой объединительной пластины.
ШВР в примерном варианте реализации изобретения содержит 7-дюймовый экран с не перекрывающимися стереоскопическими 3D-изображениями, таким образом левый глаз видит дополнительную область слева, а правый глаз видит дополнительную область справа. ШВР пытается имитировать нормальное человеческое зрение, которое не является 100% перекрывающимся. Поле зрения в примерном варианте реализации изобретения является более 90 градусов по горизонтали (110 градусов по диагонали), заполняющее, таким образом, приблизительно все поле зрения так, что реальный мир может быть полностью перекрытым для создания сильного ощущения погружения.
В варианте реализации изобретения может быть использовано разрешение 1280×800 (соотношение сторон 16:10), таким образом обеспечивая эффективное разрешение 640×800 при соотношении сторон 4:5 для каждого глаза. В варианте реализации, который не обеспечивает полное перекрытие между глазами, объединенное горизонтальное разрешение эффективно выше, чем 640. Демонстрируемое изображение для каждого глаза является вогнутым, таким образом для каждого глаза генерируется сферически размеченное изображение.
ШВР 200 может связываться с внешним вычислительным устройством(и) 110. Внешнее вычислительное устройство(а) 110 включает серверы приложений, базы данных и другие внешние вычислительные компоненты, известные в данной области техники, включая стандартные аппаратные вычислительные компоненты, такие как сетевой и медийный интерфейсы, энергонезависимый машиночитаемый носитель данных, и процессоры для выполнения команд или получения доступа к информации, которая может храниться в запоминающем устройстве.
Носимая система виртуальной реальности 100 может, в некоторых случаях, быть физически соединенной с внешним вычислительным устройством(ами) 110. Такое соединение может быть реализовано посредством USB интерфейса 120, который может использоваться для отправления данных к и получения данных от внешнего вычислительного устройства 110 посредством USB-совместимого кабельного соединения. USB интерфейс 120 может также использоваться для обеспечения питания носимой системы виртуальной реальности 100, таким образом потенциально устраняя необходимость во внешнем источнике питания и любом силовом кабельном соединении в связи с тем же. В некоторых случаях, дополнительный адаптер питания (не показан) может быть необходим для обеспечения питания при помощи USB интерфейса 120. Следует понимать, что ссылка на USB выполнена в качестве примера и другие типы интерфейсов могут использоваться, включая, но не ограничиваясь, FireWire, Lightning, также как и другие стандарты кабельного соединения, такие как HDMI и DVI.
Носимая система виртуальной реальности 100 по Фиг.1 содержит беспроводный коммуникационный интерфейс 130. Беспроводный коммуникационный интерфейс 130 может быть использован для беспроводной коммуникации с внешним вычислительным устройством(ами) 110. Беспроводный коммуникационный интерфейс 130 может также использоваться для связи с другими носимыми вычислительными устройствами 100. Беспроводный коммуникационный интерфейс 130 может использовать любое количество беспроводных стандартов связи, которые поддерживают двунаправленный обмен данными по пакетной сети, такой как Интернет. Примерные стандарты связи включают CDMA, GSM/GPRS, сотовый 4G, WiMAX, LTE и стандарт 802.11 (WiFi).
Носимая система виртуальной реальности 100 может содержать один или более трехмерных гироскопов 140, акселерометров 150 и магнитометров 160. Гироскоп 140 может использоваться для измерения ориентации на основании принципов углового момента. Акселерометр 150 может использоваться для определения величины и направления ускорения как векторной величины. Этот результат может быть использован для определения ориентации, поскольку направление изменений веса, координатное ускорение, соотнесенное с силой притяжения, или изменение в силе притяжения и вибрация, удар и падение в резистивной среде определяются при помощи изменения в соответствующем ускорении. Магнитометры 160 могут использоваться для определения нарушений магнитного поля относительно носимой системы виртуальной реальности 100. Магнитометр 160 может помочь в определении настоящего Севера для GPS и компасных приложений, а также помочь с бесконтактным или бескамерным вводом посредством жестов. Используя данные, генерируемые из вышеупомянутого, может быть рассчитано отслеживание абсолютной ориентации головы без смещения относительно земли. Скрытое отслеживание может работать на примерно 1000 Гц для уменьшения времени отклика и увеличении воспринимаемого реализма. Дисплеи носимой системы виртуальной реальности 100 могут настраиваться, позволяя смещение отдельных дисплеев дальше или ближе к глазам пользователя.
Носимая система виртуальной реальности 100 может работать посредством выполнения инструкций, хранящихся в энергонезависимом машиночитаемом носителе данных 170, причем выполнение приводится через работу процессора 180. Хотя Фиг.1 иллюстрирует носитель данных 170 и процессор 180 как присутствующие на носимой системе виртуальной реальности 100, такие элементы могут располагаться во внешнем вычислительном устройстве(ах) 110 или, в некоторых случаях, с выполняющимися командами, распределенными между обоими. Процессор 180 и выполняемые команды в носителе данных 170 могут также управлять различными аспектами USB интерфейса 120, беспроводного интерфейса 130, гироскопов 140, акселерометров 150 и магнитометров 160.
Фиг. 2А иллюстрирует ШВР 200, который полностью погружает пользователя в среду виртуальной реальности. Хотя на Фиг. 2А проиллюстрированы иммерсионные очки, другие форм факторы возможны и представляются. Работа элементов в Фиг. 2А такая же, как и описанная в контексте Фиг. 2В. Фигура 2А содержит укрепляемую на голове поддерживающую структуру 210, которая позволяет носимой системе виртуальной реальности 100 (включая ШВР 200) располагаться на голове пользователя. ШВР 200 дополнительно содержит линзовые дисплеи 220А и 220В, которые могут иметь LCD или LCOS конструкцию, как описано выше. Линзовые дисплеи 220А и 220В могут быть интегрированы в носимую систему виртуальной реальности 100.
Производство носимой системы виртуальной реальности 100 может позволять интеграцию компонентов, подобных тем, что проиллюстрированы на Фиг.1, и различных соединений компонентов для внутренней интеграции. Другие компоненты могут быть расположены на наружной стороне носимой системы виртуальной реальности 100 для обеспечения более быстрого доступа или физических соединений с внешним вычислительным устройством(ами) 110. Вариант реализации носимой системы виртуальной реальности 100 может содержать микрофон для обеспечения голосовой связи с другими пользователями, использующими носимые системы виртуальной реальности 100, или для обеспечения определенного управления системой 100 без использования рук.
Фиг. 2В иллюстрирует ШВР 200, обеспечивающий генерирование информации виртуальной реальности, в то же время поддерживая восприятие реального мира. Такое двойное восприятие предоставляется для не полного погружения пользователя в пределы виртуальной среды (то есть реальный мир по-прежнему может быть виден и ощущаем). Хотя ШВР 200 по Фиг. 2В проиллюстрирован, как простая повязка, другие форм-факторы возможны и представляются. Работа элементов в Фиг. 2В такая же, как и описанных в контексте Фиг. 2А.
Фиг. 3 иллюстрирует примерный вариант реализации прерывания среды ВР. Как проиллюстрировано, пользователь 310 ШВР 200 смотрит "прямо по линии" или "неподвижно по центру" среды ВР 320, центр которой отражается лучом 330. Следует отметить, что луч 330 представлен отдельно в целях облегчения иллюстрации и не присутствует буквально в среде ВР 320, хотя существует возможность, что индикация ориентации может отображаться ШВР 200 по отношению к виртуальной среде 320. Как отражено лучом 330 и линией зрения пользователя (340), они оба могут быть относительно параллельны друг другу.
Луч 330, хотя не является необходимым иллюстрируемым элементом в среде ВР, может определяться при калибровке ШВР 200, когда пользователь 310 впервые надевает то же на свою голову. Используя информацию, генерируемую одним или более трехмерными гироскопами 140, акселерометрами 150 и магнитометрами 160, носимая система виртуальной реальности 100 может рассчитывать "начальное" или "нейтральное" положение пользователя и среды ВР, из которого дальнейшее движение головы пользователя 310, и по мере расширения в ШВР 200, настраиваются. Такая калибровка может производиться в начале работы, во время ручного перезапуска или в ответ на автоматическое определение носимой системой виртуальной реальности 100, что информация о позиционировании "поплыла" или более не совпадает соответствующим образом, так что калибровка необходима. Такое определение может происходить из-за выполнения программ, хранящихся в устройстве хранения 170, процессором 180.
Обратимся теперь к пользователю 350 по Фиг. 3, такой пользователь (который является таким же пользователем, как и пользователь 310, но просто повернул свою голову примерно на 45 градусов) повернул свою голову так, что его линия взгляда более не параллельна лучу 330, как установлено во время вышеупомянутого процесса калибровки. Новая линия зрения 3401 отображает то, что линия зрения сейчас является смещенной примерно на 45 градусов (360) вправо относительно от оригинального установленного луча 330. Используя информацию, генерируемую одним или более из трехмерных гироскопов 140, акселерометров 150 и магнитометров 160, носимая система виртуальной реальности 100 может рассчитывать, насколько далеко линия зрения 3401 изменилась от "начального" или "нейтрального" положения пользователя, и это было использовано для установления луча 330.
Подобно лучу 330, угол 360 проиллюстрирован для помощи в понимании реализации прерывания среды или функции "приостанавливания", при которой активность в среде приостанавливается или устанавливается на паузу, позволяя некоторые другие функции, включая, но не ограничиваясь, навигационное меню. Но так же, как луч 330, угол 360 может быть визуально проиллюстрирован пользователю в виртуальной среде 320 как часть графического окружения. Эта информация может отображаться как геометрическая иллюстрация, показывающая актуальное отклонение угла от центрального луча 330, или, скорее, как цифровой индикатор количества градусов (например, 12 градусов) от центра 330, на который пользователь повернул свою голову.
Следует отметить, что хотя вариант реализации настоящего изобретения отдельно вызывает функции "прерывание" или "приостанавливание" путем поворачивания пользователем своей головы на конкретный угол, как проиллюстрировано на Фиг.3, другие функции могут быть связаны с изменением положения (например, функция сохранения, функция переустановки, функция перезапуска). В этой связи, функции "прерывание" или "приостанавливание" являются примерными. Кроме того, вариант реализации может использовать различные углы с различными функциями. Например, "приостановить" может реализовываться после установления 20 градусов от центра 330, в то время как "сохранить" может реализовываться после установления 30 градусов от центра 330, а "перезапуск" - после установления 45 градусов от центра 330. Реализация этих функций может происходить, как только изменение градуса достигло, или после того, как пользователь оставил свою голову в определенном измененном положении на предварительно определенный период времени.
Фиг. 4 иллюстрирует способ 400 реализации прерывания среды ВР. Способ 400 по Фиг.4 может быть реализован как выполняемые команды в энергонезависимом машиночитаемом носителе данных включая, но не ограничиваясь, CD, DVD, или постоянном носителе данных, таком как жесткий диск. Такие способы могут быть реализованы процессором 180 при выполнении компьютерно-читаемых команд, содержащихся в энергонезависимом запоминающем устройстве 170. Процессор 180 и программы, сохраненные в запоминающем устройстве 170, могут использовать данные, полученные от различных других компонентов системы 100, включая трехмерные гироскопы 140, акселерометры 150 и магнетометры 160. Этапы, указанные в Фиг. 4 (и их порядок), являются примерными и могут включать различные альтернативы, эквиваленты или отступления от них, включая, но не ограничиваясь, порядок выполнения того же.
На этапе 410 может начинаться процесс калибровки. Калибровка может происходить в начале работы носимой системы виртуальной реальности 100 или в ответ на запуск конкретного приложения в рамках системы 100. Пользователь может также запросить ручную калибровку или система 100 может потребовать калибровку из-за смещения положения.
В ответ на процесс калибровки информация от трехмерных гироскопов 140, акселерометров 150 и магнетометров 160 получается на этапе 420. Информация будет использована для определения нейтрального или положения "в состоянии покоя", из которого будут оцениваться все остальные угловые расчеты. Это определение может соответствовать, например, лучу 330, как обсуждалось в контексте Фиг. 3. Измерения и расчеты могут иметь место по оси Х, так же как и по оси Y. Принимая это во внимание, "приостанавливание", или другие функции, могут быть представлены не только движением вдоль оси Х, но также вдоль оси Y или даже комбинацией обоих (например, пользователь поднимает свою голову направо и над определенным положением).
На этапе 430 различные элементы управления могут быть установлены по отношению к данным позиционирования, сгенерированным на этапе 420. Нейтральное положение луча 330 может быть подтверждено так же, как и различные функции, которые могут быть реализованы, если данные позиционирования ШВР 200 указывают на то, что пользователь повернул свою линию зрения за установленный угол, который может включать угол относительно конкретной оси или осей. В некоторых случаях, различные функции могут быть реализованы для увеличения углов изменения. Также могут использоваться интервалы времени, в течение которых пользователь должен изменить свою линию зрения вдоль определенной оси над определенным углом для данного интервала времени.
На этапе 440 отслеживание ШВР 200 начинает использовать информацию, сгенерированную подобными трехмерными гироскопами 140, акселерометрами 150 и магнитометрами 160. С помощью процесса отслеживания реализована постоянная проверка того, не указывают ли данные позиционирования ШВР 200 на то, что превышено одно из ограничений или настройка управления на этапе 430. Например, как показано на Фиг. 3, определение осуществляется таким образом, что определяется, повернул ли пользователь свою голову и соответственно угол своей линии зрения 340 за определенный угол управления относительно нейтрального луча 330. Если угол не превышен (или не превышен за определенный интервал времени), тогда отслеживание продолжается на этапе 440 и проверяется относительно настроек от этапа 430, продолжая выполняться на этапе 450. Если же, однако, пользователь превысил установленное настройкой положение относительно определенной оси для определенного интервала времени (или любой другой настройки, контролируемой на этапе 430), тогда соответствующая функция, такая как "приостановка", может быть реализована на этапе 460.
Фиг. 5 иллюстрирует использование недвижимости, находящейся вне поля зрения, для предоставления информации дополнительно к среде ВР. Может быть определено, что пользователь повернул свою голову за нейтральную или центральную настройку, так как это было оговорено в контексте Фиг. 3. Поскольку пользователь приостановил среду ВР, отображаемую ШВР 200, пользователь может теперь обращаться к другим выполняемым функциям в недвижимых областях, которые не являются прямой частью среды ВР и которые будут обычно относиться к областям "периферийного зрения" линии зрения пользователя.
Например, эта область может содержать различные меню и элементы управления, относящиеся к среде ВР или к приложению, конкретно выполняемому для генерирования среды ВР. Она также может содержать данные о среде ВР, такие как статус активности, принимающей участие в среде (например, счет, жизнь, снаряжение и т.д.). Недвижимые объекты периферийной области также могут содержать информацию относительно системы 100 или ШВР 200 системы 100. Реклама также может демонстрироваться в этой области. Другие приложения могут также выполняться в этой области, такие как видеозвонки, сообщения или другие виды связи в реальном времени. Используя это пространство для таких данных и разрешая пользователю доступ к нему во время состояния приостановки, основная линия зрения в среде ВР может быть использована лучше.
Настоящее изобретение может быть реализовано в приложении, которое может работать, используя различные устройства. Энергонезависимый машиночитаемый носитель данных относится к любому носителю, который принимает участие в предоставлении команд для выполнения центральным процессорным устройством (ЦПУ). Такой носитель может принимать любые формы, включая, но не ограничиваясь, энергонезависимые и энергозависимые носители, такие как оптические и магнитные диски и динамическая память, соответственно. Общие формы энергонезависимых машиночитаемых носителей включают, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любые другие магнитные носители, CD-ROM диск, диск цифрового видео (DVD), любые оптические носители, ОЗУ, ППЗУ, СППЗУ, флеш-ППЗУ и любые другие кристаллы или картриджи запоминающих устройств.
Различные формы передающей среды могут использоваться для передачи одной или более последовательностей одной или более команд для выполнения на ЦПУ. Шина переносит данные на системное ОЗУ, из которого ЦПУ извлекает и выполняет команды. Команды, получаемые системным ОЗУ, могут не обязательно храниться на несъемном диске как до, так и после выполнения ЦПУ. Различные формы носителя могут подобным образом реализоваться так же, как и необходимые сетевые интерфейсы и сетевые топологии для реализации того же.
Хотя различные варианты реализации были описаны выше, следует понимать, что они были представлены исключительно в качестве примера, а не ограничения. Описания не предназначены для ограничения объема изобретения до конкретных изложенных здесь форм. Таким образом, сущность и объем предпочитаемого варианта реализации изобретения не должны ограничиваться любым из описанных выше вариантов изобретения. Следует понимать, что приведенные выше описания являются иллюстративными, а не ограничивающими. Напротив, настоящие описания предназначены для охвата таких альтернатив, модификаций и эквивалентов, которые могут быть включены в сущность и объем изобретения, как определено прилагающейся формулой изобретения и будет очевидно для специалиста в данной области техники. Объем изобретения должен, тем не менее, определяться не по отношению к приведенным выше описаниям, но, напротив, должен определяться по отношению к приложенной формуле изобретения наряду со всем объемом эквивалентов.
Носимое вычислительное устройство содержит шлем виртуальной реальности (ШВР), который генерирует среду виртуальной реальности. Посредством генерирования и отслеживания данных позиционирования виртуальная среда может быть прервана или приостановлена. Во время остановки указанной среды пользователь может иметь доступ к множеству дополнительных меню и средств управления, в противном случае не доступных во время нормальной работы виртуальной среды. 3 н. и 9 з.п. ф-лы, 6 ил.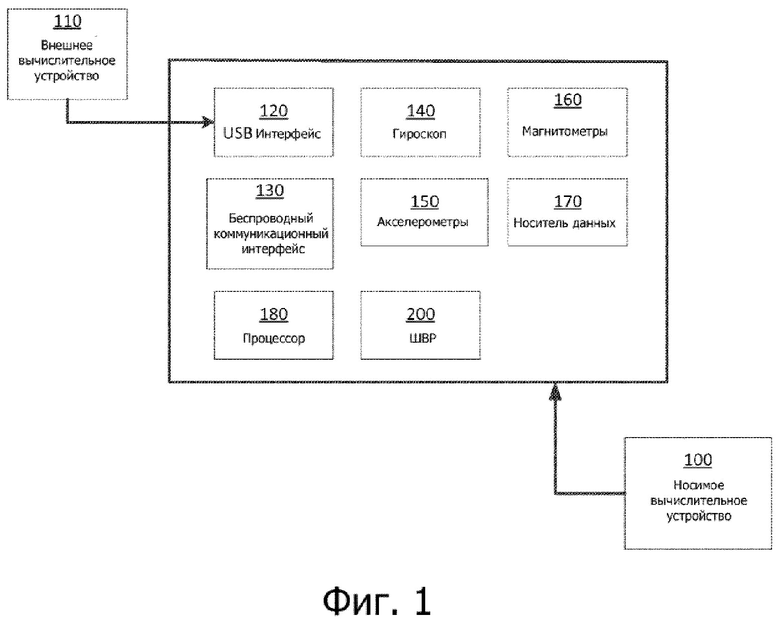
1. Способ прерывания виртуальной среды в шлеме виртуальной реальности, содержащий этапы, на которых:
сохраняют в запоминающем устройстве информацию о по меньшей мере одной настройке управления, которая связывает функцию с изменением положения шлема виртуальной реальности;
калибруют шлем виртуальной реальности, при этом идентифицируется начальное положение шлема виртуальной реальности;
генерируют данные позиционирования, которые отслеживают движение шлема виртуальной реальности;
определяют, что текущее положение шлема виртуальной реальности свидетельствует об изменении от начального положения, превышающем упомянутое изменение положения, задаваемое упомянутой настройкой управления;
выполняют упомянутую функцию, связанную с настройкой управления, причем данная функция содержит прерывание виртуальной среды в шлеме виртуальной реальности посредством приостановления данной среды; и
предлагают меню функциональных возможностей в периферийной области зрения, после того как упомянутая среда была приостановлена.
2. Способ по п.1, в котором генерирование данных позиционирования включает в себя обработку данных от гироскопа.
3. Способ по п. 1, в котором генерирование данных позиционирования включает в себя обработку данных от акселерометра.
4. Способ по п. 1, в котором генерирование данных позиционирования включает в себя обработку данных от магнитометра.
5. Система для прерывания виртуальной среды в шлеме виртуальной реальности, содержащая:
запоминающее устройство, которое хранит информацию касаемо по меньшей мере одной настройки управления, которая связывает функцию с изменением положения шлема виртуальной реальности;
по меньшей мере одно из гироскопа, магнитометра и акселерометра, которое:
калибрует шлем виртуальной реальности, при этом идентифицируется начальное положение шлема виртуальной реальности, и
генерирует данные позиционирования, которые отслеживают движение шлема виртуальной реальности;
процессор, который исполняет команды, хранимые в запоминающем устройстве, для:
определения того, что текущее положение шлема виртуальной реальности свидетельствует об изменении от начального положения, превышающем упомянутое изменение положения, задаваемое упомянутой настройкой управления, и
выполнения упомянутой функции, связанной с настройкой управления; и
шлем виртуальной реальности, содержащий по меньшей мере одну линзу для отображения виртуальной среды, причем выполнение упомянутой функции прерывает данную среду посредством приостановки этой среды; и при этом шлем виртуальной реальности дополнительно предлагает меню функциональных возможностей в периферийной области зрения, после того как упомянутая среда была приостановлена.
6. Система по п.5, в которой генерирование данных позиционирования включает в себя обработку данных от гироскопа.
7. Система по п.5, в которой генерирование данных позиционирования включает в себя обработку данных от акселерометра.
8. Система по п.5, в которой генерирование данных позиционирования включает обработку данных от магнитометра.
9. Энергонезависимый машиночитаемый носитель данных, на котором воплощена компьютерная программа, исполняемая процессором для выполнения способа прерывания виртуальной среды в шлеме виртуальной реальности, содержащего:
хранение в запоминающем устройстве информации о по меньшей мере одной настройке управления, которая связывает функцию с изменением положения шлема виртуальной реальности;
калибровку шлема виртуальной реальности, при этом идентифицируется начальное положение шлема виртуальной реальности;
генерирование данных позиционирования, которые отслеживают движение шлема виртуальной реальности;
определение того, что текущее положение шлема виртуальной реальности свидетельствует об изменении от начального положения, превышающем упомянутое изменение положения, установленное упомянутой настройкой управления;
выполнение упомянутой функции, связанной с настройкой управления, причем данная функция включает прерывание виртуальной среды в шлеме виртуальной реальности посредством приостановления данной среды; и
предложение меню функциональных возможностей в периферийной области зрения, после того как упомянутая среда была приостановлена.
10. Энергонезависимый машиночитаемый носитель данных по п. 9, при этом генерирование данных позиционирования включает обработку данных от гироскопа.
11. Энергонезависимый машиночитаемый носитель данных по п. 9, при этом генерирование данных позиционирования включает в себя обработку данных от акселерометра.
12. Энергонезависимый машиночитаемый носитель данных по п. 9, при этом генерирование данных позиционирования включает в себя обработку данных от магнитометра.
| US 2013069787 A1, 21.03.2013 | |||
| US 2013336629 A1, 19.12.2013 | |||
| US 2013007668 A1, 03.01.2013 | |||
| Устройство для печатания этикетки, например, на поверхности стеклянной цилиндрической тары | 1957 |
|
SU111703A1 |

