ОБЛАСТЬ ТЕХНИКИ
Настоящее техническое решение относится к области вычислительной техники, в частности, к системам для погружения в виртуальную реальность.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно решение, выбранное в качестве наиболее близкого аналога, WO 2019/122950 А1, 27.06.2019. Данное решение относится к области вычислительной техники, а именно к способу и системе обратного оптико-инерционного слежения за мобильным объектом. Способ включает этапы: обеспечение того, что множество маркеров излучает свет в инфракрасном диапазоне; считывание с помощью первого устройства обработки данных изображения с оптического датчика, который физически подключен к мобильному объекту, и идентификация в считанном изображении пикселей, которые удовлетворяют заранее заданным условиям; идентификацию на основе идентифицированных пикселей и с использованием первого устройства обработки данных изображений маркеров и определение параметров упомянутых изображений маркеров; считывание с помощью первого устройства обработки данных, по меньшей мере, от одного инерциального датчика, который физически подключен к мобильному объекту; создание с помощью первого устройства обработки данных объединенного потока данных, содержащего параметры изображений маркеров и данных от упомянутого по меньшей мере одного инерциального датчика, и передачу упомянутого потока данных посредством первого сообщения устройство ко второму устройству связи; прием объединенного потока данных посредством второго устройства связи и определение на основе указанного потока данных позиционных данных трекера в системе координат зоны движения мобильного объекта; проверка с помощью второго устройства обработки данных и с использованием позиционных данных трекера математической модели траектории движения трекера; экстраполяция с помощью второго устройства обработки данных и с использованием проверенной математической модели траектории движения трекера позиционных данных трекера до горизонта экстраполяции.
Однако стоит отметить, что в известном уровне техники, не раскрыта информация об обеспечении высокой точности передачи данных при отслеживании движений пользователя и об обеспечении минимальной задержки между детектированием изменения положения пользователя в пространстве и выводом на устройства отображения соответствующего изображения за счет эффективной обработки данных.
Предлагаемое решение направлено на устранение недостатков современного уровня техники и отличается от известных решений тем, что предложенная система обеспечивает высокую точность передачи данных при отслеживании движений пользователя, обеспечивает минимальную задержку между детектированием изменения положения пользователя в пространстве и выводом на устройство отображения соответствующего изображения, а также при использовании системы помогает избежать такого явления, как кинетоз.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической проблемой, на решение которой направлено заявленное решение, является создание системы для погружения в виртуальную реальность, которая охарактеризована в независимом пункте формулы. Дополнительные варианты реализации настоящего изобретения представлены в зависимых пунктах изобретения.
Технический результат заключается в расширении арсенала технических средств заявленной системы.
Заявленный результат достигается за счет осуществления системы для погружения в виртуальную реальность, которая содержит:
контроллер захвата движения, содержащий массив инфракрасных светодиодов, причем контроллер захвата движения реализован в виде сдвоенной камеры, и выполнен с возможностью захвата изображения в ближнем инфракрасном диапазоне, также, контроллер захвата движения дополнительно содержит устройства для передачи захваченных изображений на вычислительное устройство;
по меньшей мере два инерциальных модуля, подключенные к одной шине, основанной на SPI протоколе передачи данных, причем инерциальные модули содержат:
- трехосевой микроэлектромеханический (МЭМС) акселерометр;
- трехосевой магнетометр;
- трехосевой МЭМС гироскоп;
- микроконтроллер;
интерфейсную плату, выполненную с возможностью осуществления первичной обработки полученных данных и осуществления последовательного опроса каждого инерциального модуля и передачу полученных данных на вычислительное устройство, причем интерфейсная плата также подключена к шине, основанной на SPI протоколе передачи данных;
устройство отображения изображения, выполненное с возможностью отображения изображения с частотой по меньшей мере 90 кадров в секунду, содержащее встроенный инерциальный датчик вращения и линзы с низким уровнем геометрических и хроматических дисторсий.
В частном варианте реализации описываемого решения, в системе микроконтроллер, это микроконтроллер stm32f0 на 32-битной архитектуре cortex m0.
В частном варианте реализации описываемого решения, в системе, для определения угловых координат аппарата используется фильтр Калмана.
В другом частном варианте реализации описываемого решения, в системе, линзы содержащиеся в устройстве отображения изображения, выполнены с возможностью регулировки межлинзового расстояния.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
Фиг. 1, иллюстрирует схему вычислительного устройства.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Компьютерные технологии активно используются в образовательном процессе практически по всему миру. Создание обучающих компьютерных игр и симуляторов представляет собой одно из ключевых направлений в компьютеризации обучения. Полное погружение в виртуальную реальность и взаимодействие с ее объектами достигается только при использовании специальных устройств. Такие устройства, которые обеспечивают полное погружение в виртуальную реальность и имитируют взаимодействие человека с ней с помощью органов чувств называют системами виртуальной реальности (VR).
Важным фактором для повышения уровня погружения в виртуальную среду является возможность интерактивного взаимодействия с элементами окружения и персонажами в виртуальной реальности.
На данный момент большинство технологий ограничены возможностью вращать головой, перемещаться по небольшой ограниченной площади и простым взаимодействием с помощью джойстиков.
Современные тенденции развития технологий направлены в сторону расширения спектра движений пользователя, передаваемых в виртуальный мир.
Предлагаемое техническое решение использует комбинацию оптического и инерциального датчиков для задачи трекинга рук пользователя и ведения диалогов с виртуальными персонажами в симуляторах в виртуальной реальности.
Подробное описание элементов системы для погружения в виртуальную реальность.
Контроллер захвата движения Leap Motion.
Контроллер захвата движения Leap Motion представляет из себя сдвоенную камеру, снимающую в ближнем инфракрасном диапазоне, массив инфракрасных светодиодов, и электронику для передачи изображения на вычислительное устройство. Массив инфракрасных светодиодов подсвечивает все предметы, находящиеся в рабочей области, а камеры, в свою очередь, отслеживают их перемещение. Получившееся изображение передается на вычислительное устройство, к которому подсоединен контроллер захвата движения.
За счет стереоскопичности изображения, получаемого с камер, и алгоритмов компьютерного зрения, становится возможным распознать контуры рук и определить точное положение запястий, ладоней и пальцев в пространстве.
Инерциальный модуль Psycho suit.
Инерциальный модуль представляет собой датчике корпусе, закрепляемый на теле пользователя.
Для реализации поставленной задачи необходимо по меньшей мере по два инерциальных модуля на каждой руке пользователя.
Инерциальные модули закрепляются на плечевой и лучевой частях руки.
В состав одного инерциального модуля входят:
- трехосевой микроэлектромеханический акселерометр;
- трехосевой магнетометр;
- трехосевой микроэлектромеханический гироскоп;
- микроконтроллер stm32f0 на 32-битной архитектуре Cortex М0.
Инерциальные модули подключаются к одной шине, основанной на SPI протоколе передачи данных. Также, к этой шине подключена интерфейсная плата, выполняющая последовательный опрос каждого инерциального модуля и передачу данных на вычислительное устройство.
Каждый инерциальный модуль имеет свой уникальный адрес. В процессе опроса, интерфейсная плата по очереди отправляет в шину пакет с адресом инерциального модуля и соответствующий инерциальный модуль отвечает пакетом, содержащим данные с внутренних датчиков (трехосевой микроэлектромеханический акселерометр, трехосевой магнетометр, трехосевой микроэлектромеханический гироскоп).
После полного цикла опроса, интерфейсная плата отправляет суммарный пакет со всеми данными на вычислительное устройство через интерфейс USB HID (Human interface device).
Отправка суммарного пакета производится с частотой 100 Гц.
Питание комплекса инерциальных модулей требует 5 В напряжения и до 200 мА тока и производится через интерфейсный USB интерфейс.
МЭМС - «микроэлектромеханические системы» (Microelectromechanical systems) представляют собой миниатюрные устройства, содержащие микроэлектронные и микромеханические компоненты.
Стандартная архитектура МЭМС-устройств включает в себя набор связанных друг с другом механических компонентов и устройства обработки данных (микропроцессор), получаемых от этих компонентов.
Гироскопы поучили широкое применение в качестве инструмента решения задач навигации. Принцип работы данных устройств основан на определении угловых скоростей посредствам измерения ускорения Кориолиса, возникающих при вращении объекта.
Конструкция гироскопа предусматривает наличие двух основных блоков: кристалл измерительного элемента и кристалл обрабатывающей микросхемы. Производство измерительного элемента осуществляется по технологии микрообработки. Он представляет собой пластину, на которую в условиях вакуума нанесена колеблющаяся поликремниевая масса, с осью чувствительности, находящейся в плоскости кристалла. Угловая скорость в плоскости кристалла определяется, как и в механическом гироскопе, по емкостным параметрам. Поликремниевая масса приводится во вращательные колебания вокруг своей центральной точки посредствам управляющих колебаний электрического поля, которые стабилизируются электроникой микросхемы. Из-за того, что измерительный элемент обладает симметрией и единственной центральной точкой подвеса, датчик малочувствителен к поступательному ускорению.
Благодаря сохранению углового момента, угловая скорость в плоскости кристалла вызывает ударные ускорения в полимерной массе, которые находятся уже в другой плоскости. Параметры этих вне плоскостных ускорений становится возможно определить благодаря встроенным электродам.
Акселерометр - датчик линейного ускорения. В МЭМС акселерометрах принцип определения ускорения достаточно прост и надежен. Акселерометр состоит из трех основных элементов - корпус, пружина и инерционная масса. С изменением скорости корпуса сенсора, инерционная масса через пружину так же стремится изменить свою скорость.
Сила, воздействующая на инерционную массу, действует опосредовано, поэтому пружина деформируется. Расстояние между корпусом и инерционной массой изменяется пропорционально ускорению, действующему на тело.
Магнитометр - датчик напряженности магнитного поля. Ключевым элементом датчика является тонкая полоска ферромагнитного материала, сопротивление которой изменяется под действием внешнего магнитного поля (составляющей поля, перпендикулярной направлению тока, проходящего по этой полоске). На измерении сопротивления этой полоски и основывается принцип работы таких датчиков.
Принцип работы магнитометра заключается в измерении изменения сопротивления магниторезистора, которое зависит от величины индукции внешнего магнитного поля.
Изменение сопротивления имеет очень маленькую величину, поэтому для его определения используется специальный метод, основанный на применении моста Уитстона, имеющий высокую чувствительность.
Мост состоит из магниторезисторов, имеющих в состоянии покоя одинаковое сопротивление R. Во время измерения на мост подается напряжение Vb, и через резисторы начинает протекать ток. Всякий раз, при воздействии на измерительный мост магнитного поля Н, вектор намагниченности в двух противоположно расположенных резисторах моста смещается по направлению тока, что вызывает увеличение их сопротивления. В оставшихся двух противоположно расположенных резисторах моста вектор намагниченности смещается против направления тока, в результате сопротивление их уменьшается. Таким образом, в линейном диапазоне выход датчика пропорционален приложенному магнитному полю.
Описанная комбинация датчиков позволяет получить все необходимые данные для определения ориентаций необходимых элементов скелета пользователя для последующего переноса в виртуальную реальность.
Игры в виртуальной реальности создают эффект погружения, несравнимый с традиционными, однако у технологии остается еще множество проблем: она требует большого количества вычислительных ресурсов, а VR-устройства пока не совершенны. Трудности для разработчиков создают также особенности человеческого организма. В частности, в виртуальной реальности люди могут испытывать тошноту. Особенно сильно эта проблема влияет на комфорт пользователя при чтении текстов в виртуальной реальности.
Кинетоз. Причины тошноты.
Виртуальная реальность «обманывает» мозг. Положение и движение человека в пространстве фиксируется вестибулярным аппаратом, находящимся во внутреннем ухе. Именно этот орган передает мозгу информацию о том, что происходит с телом в данный момент. Вкупе с информацией, получаемой другими органами чувств (в частности, глазами), мозг определяет, что нужно делать и чувствовать остальному организму.
В виртуальной реальности показатели вестибулярного аппарата и органов зрения разнятся, ведь человек видит движение, но тело остается в покое. Мозг воспринимает визуальную информацию как галлюцинацию, которую можно испытать при отравлении, а потому вызывает тошноту, чтобы очистить организм. Это явление называется кинетоз.
Выделены основные причины эффекта укачивания в виртуальной реальности:
1) Несоответствие между движениями головы пользователя и движениями камеры в виртуальной реальности как по угловым, так и по линейным перемещениям
2) Задержка между движениями пользователя и соответствующими им движениями модели в виртуальной реальности
3) Несоответствие между межзрачковым расстоянием пользователя и расстоянием между виртуальными камерами, обеспечивающими стереоскопичность изображения
4) Искажения, вызванные неидеальностью линз в шлеме виртуальной реальности
5) Низкая частота кадров.
Во избежание эффекта укачивания в виртуальной реальности, в качестве минимального значения частоты обновления кадров в очках, принято значение равное 90 Гц. Ниже этого значения человеческий глаз замечает мерцание, что приводит к эффекту укачивания.
Предложенное решение в качестве устройства отображения может использовать очки виртуальной реальности, выполненные с возможностью отображения изображения с частотой 90 кадров в секунду, содержащие встроенный инерциальный датчик вращения, линзы с низким уровнем геометрических и хроматических дисторсий, выполненные с возможностью регулировки межлинзового расстояния.
Также для обеспечения большего соответствия между реальными движениями пользователя и движениями его виртуальной модели, необходимо учитывать размеры скелета игрока.
Для определения угловых координат аппарата необходимо использование набора из трех типов датчиков (3-хосевые акселерометры, гироскопы и магнитометр), а также алгоритм комплексирования полученных данных.
В качестве алгоритма комплексирования используется фильтр Калмана.
Фильтр Калмана является рекурсивным фильтром, который на основе неполных и шумных данных выполняет расчет оптимальной оценки состояния динамической системы.
Фильтр Калмана предназначен для рекурсивного дооценивания вектора состояния априорно известной динамической системы, то есть для расчета текущего состояния системы необходимо знать текущее измерение, а также предыдущее состояние самого фильтра. Таким образом, фильтр Калмана, подобно другим рекурсивным фильтрам, реализован во временном, а не в частотном представлении, но в отличие от других подобных фильтров, фильтр Калмана оперирует не только оценками состояния, а еще и оценками неопределенности (плотности распределения) вектора состояния, опираясь на формулу Байеса условной вероятности.
Алгоритм работает в два этапа. На этапе прогнозирования фильтр Калмана экстраполирует значения переменных состояния, а также их неопределенности. На втором этапе по данным измерения (полученного с некоторой погрешностью) результат экстраполяции уточняется. Благодаря пошаговой природе алгоритма, он может в реальном времени отслеживать состояние объекта (без заглядывания вперед, используя только текущие замеры и информацию о предыдущем состоянии и его неопределенности).
При неизменных значениях среднеквадратичных отклонений ошибок показаний сенсоров, коэффициент Калмана асимптотически приходит к установившемуся значению с ростом количества итераций.
Поэтому на практике в простых случаях, есть возможность подобрать этот коэффициент (методом перебора или на основании известным параметров ошибок сенсоров) и использовать его постоянно, не высчитывая его на каждой итерации. В таком случае фильтр Калмана вырождается в так называемый комплементарный фильтр (усреднение с весовыми коэффициентами, в сумме дающими единицу).
Определение метода представления структуры диалога.
В предлагаемом решении, также, стоит задача обеспечения возможности ведения диалога между пользователем и компьютерной системой в процессе проведения различного рода симуляций в виртуальной реальности.
На современном уровне развития технологий, реализация возможности проведения диалога с компьютерной системой на естественном языке - не решенная задача, т.к. сложно достаточно полноценно формализовать синтаксис и семантику языка.
В предлагаемом решении со стороны пользователя ведение диалога с симуляционной системой сводится к выбору одного из нескольких доступных вариантов реплик, предложенных в виртуальном интерфейсе. Репликой может быть как ответ на вопрос, так и постановка одного из доступных вопросов.
Структуру диалога удобно представлять в виде графа.
Граф - математический объект, состоящий из некоторого количества узлов, соединенных линиями. Узлы называются вершинами, а линии - ребрами.
Граф диалога - ориентированный взвешенный граф, каждой вершине которого сопоставлена конкретная картинка на экране (кадр) или определенное состояние диалога, характеризующееся набором доступных пользователю действий. Дуги, исходящие из вершин, показывают возможные изменения состояний при выполнении пользователем указанных действий. В качестве весов дуг указывают условия переходов из состояния в состояние и операции, выполняемые во время перехода.
Таким образом, каждый маршрут на графе соответствует возможному варианту диалога. Причем представление диалога в виде графа в зависимости от стадии разработки может выполняться с разной степенью детализации. По сути граф диалога - это граф состоянии конечного автомата, моделирующего поведение программного обеспечения при воздействиях пользователя.
Для того, чтобы пользователь смог взаимодействовать с интерфейсом диалога, необходимо в реальном времени определять события пересечений модели руки пользователя с виртуальной кнопкой интерактивного меню.
Collision Detection (определение столкновений) - алгоритмы для определения физического столкновения (или пересечения) двух твердых тел во время движения.
Кроме определения факта самого столкновения, алгоритмы Collision Detection также определяют другие параметры, необходимые для симуляции последующей реакции. Collision Detection используется в играх для предотвращения прохождения персонажа сквозь стены, физического взаимодействия объектов в игре, анимации мертвых тел (Rag Doll), движения и столкновения автомобилей и прочее.
Точное определение пересечений требует полного перебора всех треугольников модели. На практике используются комбинированные приемы оптимизации, основанные на ограничительных параллелепипедах Bounding Box (например, ААВВ, ОВВ). Также для ускорения вычисления Collision Detection используются различные алгоритмы сортировки объектов и разбиения пространства (например, BSP).
В расчете динамики твердых тел Collision Detection используется для определения факта столкновения твердых тел, с целью последующей обработки результата столкновения в соответствии с задачей.
Для того, чтобы программный модуль, выполняющий функционал, был унифицирован и его можно было подключать к разным проектам, модуль реализуют в виде программной библиотеки.
Исходный файл, написанный на языке С++, может подключать другие файлы, называемые заголовочными файлами, имеющие расширение .h, .hpp или .hxx. Подключение такого файла выполняется с помощью команды препроцессора #include. При выполнении такой команды, препроцессор вставляет в текст исходного файла содержимое заголовочного файла.
В процессе компиляции, компилятору передаются только исходные файлы, а заголовочные файлы не передаются т.к. из содержимое уже включено в исходные файлы препроцессором.
Каждый заголовочный файл может быть открыт множество раз на момент препроцессинга в различных исходных файлах. Во избежание дублирования, препроцессору даются команды на проверку таких событий, в результате чего команды на повторное внедрение заголовочных файлов игнорируются.
Как только препроцессор просканирует все исходные файлы и интегрирует текст заголовочных файлов, начинается этап компиляции программы.
Библиотекой называется набор из исходных файлов и соответствующих им заголовочных файлов, выполненный в соответствии с одной из парадигм объектно-ориентированного программирования - инкапсуляцией.
Инкапсуляция - свойство программного кода, характеризующееся в автономности и минимизации внешних зависимостей. Этим свойством должны обладать программные библиотеки для обеспечения универсальности программного модуля и возможности подключения его к разным проектам.
Для предлагаемого решения была создана программная библиотека, инкапсулирующая в себе функционал ведения диалогов с виртуальными персонажами в виртуальной реальности. Она представляет собой набор из исходных файлов и соответствующих заголовочных файлов, которые можно подключать к исходным файлам различных проектов, написанных на языке С++
Ключевым методом для детектирования пересечения модели руки пользователя с моделью интерактивного элемента является использование коллайдеров.
Сразу после попадания в игровой движок любой рисунок или модель все еще остаются простой графикой, с ней можно взаимодействовать лишь напрямую или по средствам ссылок.
Одним из первых и важнейших компонентов любого объекта в движке является коллайдер - геометрическая фигура, выполняющая роль оболочки с которой уже может взаимодействовать движок.
Движок изначально содержит различные настраиваемые примитивы: куб, сфера, капсула, но также может генерировать геометрию коллайдера на основе модели.
На Фиг. 1 далее будет представлена общая схема вычислительного устройства (100), обеспечивающего обработку данных, необходимую для реализации заявленного решения.
В общем случае устройство (100) содержит такие компоненты, как: один или более процессоров (101), по меньшей мере одну память (102), средство хранения данных (103), интерфейсы ввода/вывода (104), средство В/В (105), средства сетевого взаимодействия (106).
Процессор (101) устройства выполняет основные вычислительные операции, необходимые для функционирования устройства (100) или функциональности одного или более его компонентов. Процессор (101) исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти (102).
Память (102), как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал.
Средство хранения данных (103) может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средство (103) позволяет выполнять долгосрочное хранение различного вида информации, например, вышеупомянутых файлов с наборами данных пользователей, базы данных, содержащих записи измеренных для каждого пользователя временных интервалов, идентификаторов пользователей и т.п.
Интерфейсы (104) представляют собой стандартные средства для подключения и работы с серверной частью, например, USB, RS232, RJ45, LPT, COM, HDMI, PS/2, Lightning, FireWire и т.п.
Выбор интерфейсов (104) зависит от конкретного исполнения устройства (100), которое может представлять собой персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п.
В качестве средств В/В данных (105) в любом воплощении системы, реализующей описываемый способ, должна использоваться клавиатура. Аппаратное исполнение клавиатуры может быть любым известным: это может быть, как встроенная клавиатура, используемая на ноутбуке или нетбуке, так и обособленное устройство, подключенное к настольному компьютеру, серверу или иному компьютерному устройству. Подключение при этом может быть, как проводным, при котором соединительный кабель клавиатуры подключен к порту PS/2 или USB, расположенному на системном блоке настольного компьютера, так и беспроводным, при котором клавиатура осуществляет обмен данными по каналу беспроводной связи, например, радиоканалу, с базовой станцией, которая, в свою очередь, непосредственно подключена к системному блоку, например, к одному из USB-портов. Помимо клавиатуры, в составе средств В/В данных также может использоваться: джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор мышь, трекбол, световое перо, динамики, микрофон и т.п.
Средства сетевого взаимодействия (106) выбираются из устройства, обеспечивающий сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п.С помощью средств (105) обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM.
Компоненты устройства (100) сопряжены посредством общей шины передачи данных (110).
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХМЕРНЫМИ ОБЪЕКТАМИ В ВИРТУАЛЬНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2695053C1 |
| Устройство регистрации двигательной активности | 2016 |
|
RU2663396C2 |
| Способ трекинга гибкого хирургического инструмента на основе инерциальных МЭМС датчиков | 2021 |
|
RU2767174C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАХВАТА ДВИЖЕНИЙ И ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА И ЧАСТЕЙ ТЕЛА ЧЕЛОВЕКА | 2017 |
|
RU2662399C1 |
| СИСТЕМА ПРОЕКТИРОВАНИЯ ОБЪЕКТОВ В СРЕДЕ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ В РЕАЛЬНОМ ВРЕМЕНИ | 2017 |
|
RU2656584C1 |
| ОРИЕНТАЦИЯ И ВИЗУАЛИЗАЦИЯ ВИРТУАЛЬНОГО ОБЪЕКТА | 2014 |
|
RU2670784C9 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРОСКОРОСТИ И ДАТЧИК ВИБРОСКОРОСТИ | 2021 |
|
RU2780303C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| СПОСОБ ОБНОВЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, ОСНОВАННЫЙ НА ДЕВЯТИОСЕВОМ ДАТЧИКЕ НА ОСНОВЕ МЭМС | 2016 |
|
RU2662460C1 |

Техническое решение относится к области вычислительной техники. Технический результат заключается в повышении точности передачи данных при отслеживании движений пользователя и минимальной задержке между детектированием изменения положения пользователя в пространстве и выводом на устройство отображения соответствующего изображения. Технический результат достигается за счет системы для погружения в виртуальную реальность, которая содержит: контроллер захвата движения, содержащий массив инфракрасных светодиодов; два инерциальных модуля, подключенных к одной шине, основанной на SPI протоколе передачи данных, причем инерциальные модули содержат: трехосевой микроэлектромеханический (МЭМС) акселерометр, трехосевой магнетометр, трехосевой МЭМС гироскоп и микроконтроллер; интерфейсную плату, выполненную с возможностью осуществления первичной обработки полученных данных и осуществления последовательного опроса каждого инерциального модуля и передачи полученных данных на вычислительное устройство; устройство отображения изображения. 3 з.п. ф-лы, 1 ил.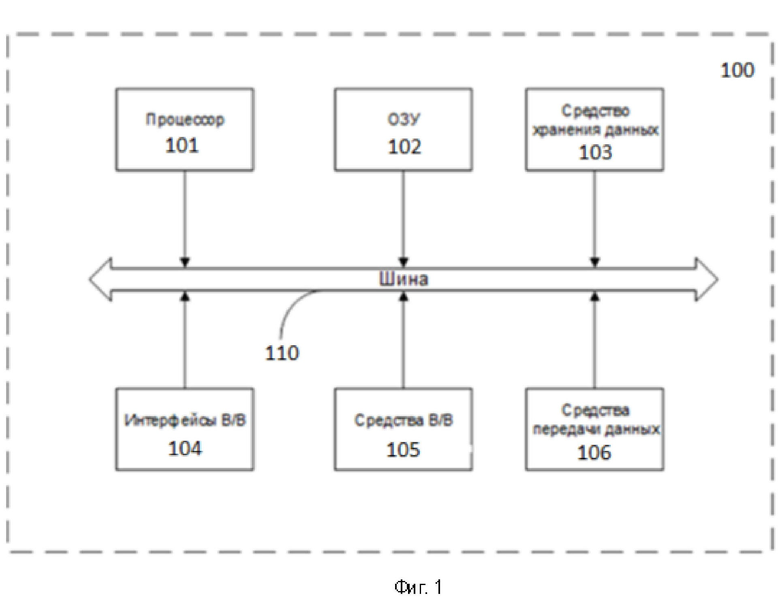
1. Система для погружения в виртуальную реальность, содержащая:
контроллер захвата движения, содержащий массив инфракрасных светодиодов, причем контроллер захвата движения реализован в виде сдвоенной камеры и выполнен с возможностью захвата изображения в ближнем инфракрасном диапазоне, также контроллер захвата движения дополнительно содержит устройства для передачи захваченных изображений на вычислительное устройство;
по меньшей мере два инерциальных модуля, подключенных к одной шине, основанной на SPI протоколе передачи данных, причем инерциальные модули содержат:
- трехосевой микроэлектромеханический (МЭМС) акселерометр;
- трехосевой магнетометр;
- трехосевой МЭМС гироскоп;
- микроконтроллер;
интерфейсную плату, выполненную с возможностью осуществления первичной обработки полученных данных и осуществления последовательного опроса каждого инерциального модуля и передачи полученных данных на вычислительное устройство, причем интерфейсная плата также подключена шине, основанной на SPI протоколе передачи данных;
устройство отображения изображения, выполненное с возможностью отображения изображения с частотой по меньшей мере 90 кадров в секунду, содержащее встроенный инерциальный датчик вращения и линзы с низким уровнем геометрических и хроматических дисторсий.
2. Система по п. 1, в которой микроконтроллер, это микроконтроллер stm32f0 на 32-битной архитектуре cortex m0.
3. Система по п. 1, в которой для определения угловых координат аппарата используется фильтр Калмана.
4. Система по п. 1, в которой линзы, содержащиеся в устройстве отображения изображения, выполнены с возможностью регулировки межлинзового расстояния.
| НАВИГАЦИЯ В МЕНЮ В НАГОЛОВНОМ УСТРОЙСТВЕ ОТОБРАЖЕНИЯ | 2015 |
|
RU2642545C1 |
| Устройство для автоматической сцепки полунавесного плуга с навесной системой трактора | 1960 |
|
SU131151A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

