Изобретение относится к космической технике и может быть использовано при создании систем обзора околоземного пространства космическими средствами для обнаружения, наблюдения и мониторинга небесных тел Солнечной системы, в том числе астероидов и комет, приближающихся со стороны Солнца и угрожающих столкновением с Землей.
Создание космических средств наблюдения и мониторинга для решения задачи астероидно-кометной безопасности исключительно за счет космических средств, осуществляющих обзор всей небесной сферы, нецелесообразно, поскольку стоимость создания космических телескопов на два порядка выше стоимости наземных [1]. Более рациональным путем является создание космических систем, дополняющих систему наземных телескопов в той части, где с земной поверхности недоступно наблюдение приближающихся к Земле опасных небесных тел. В связи с этим актуальна задача создания эффективных, наименее затратных и быстродействующих космических систем предупреждения. Применение современных систем передачи информации и ее обработки не всегда могут обеспечить требуемое быстродействие и эффективность космической системы. Наиболее эффективным методом повышения быстродействия космической системы предупреждения об астероидно-кометной опасности является уменьшение потока первичной информации, подлежащей обработке. В данном случае это возможно за счет ограничения областей обзора небесной сферы космическими средствами только тех, которые недоступны для наблюдения наземными средствами. Это, в первую очередь, области обзора возможного подлета астероидов и комет со стороны Солнца.
Известно изобретение - аналог «Способ картографирования небесной сферы и космический аппарат для его осуществления», патент РФ №2014252 МПК5 B64G 1/00, при реализации которого осуществляют просмотр кольцевых полос небесной сферы в видимом диапазоне спектра с помощью двух наблюдательных труб, расположенных под некоторым углом друг к другу. При ориентации одной наблюдательной трубы на известную опорную звезду вращают космический аппарат относительно этого направления до попадания в поле зрения второй наблюдательной трубы объекта, положение которого необходимо внести в каталог. Способ обеспечивает измерение угловых расстояний между двумя неподвижными светящимися объектами на небесной сфере. Количество опорных звезд и их координаты выбирают заранее, до запуска космического аппарата.
Недостатком данного способа является то, что он не обеспечивает обнаружение и измерение параметров орбит, движущихся к Земле небесных тел, так как нет возможности заблаговременно определить опорные ориентиры, на которые необходимо направить наблюдательную трубу при обзоре небесной сферы для обнаружения и сопровождения небесных тел, движущихся к Земле по неизвестным заранее траекториям.
Известен способ - аналог «Способ мониторинга астероидно-кометной опасности», патент РФ №2573509, B64G 4/00 (МКП 2006.01), 2014 г., при реализации которого космические аппараты, размещают в точках Лагранжа L1, L2 и L4 или L5 системы Солнце - Земля.
Недостатком этого способа является значительная удаленность космического аппарата, находящихся в точках Лагранжа L4 или L5 от Земли (150 млн. км), что создает существенные трудности информационного обмена в реальном времени с наземными пунктами приема и обработки оперативной информации об астероидно-кометной опасности, в особенности при малом времени заблаговременного обнаружения ранее неизвестных малых небесных тел, приближающихся со стороны Солнца. Размеры таких тел, представляющих реальную опасность для биосферы Земли, могут быть 50 м и менее, а время их подлета к Земле может быть не более 1 суток, поэтому задача своевременного обнаружения и предупреждения о приближении таких тел остается весьма сложной.
Недостатком этого способа является также то, что в окрестностях точек L4 и L5 находятся остатки газопылевого облака эпохи формирования планет Солнечной системы, что может создавать реальные помехи и формировать ложные цели при обзоре небесной сферы при решении задачи обнаружения небесных тел небольших размеров приближающихся к Земле со стороны Солнца (http://fiz.1september.ru/view_article.php?ID=201000910). В 2010 году в четвертой точке Лагранжа обнаружен достаточно крупный астероид. В пятой точке Лагранжа на данный момент крупных космических объектов не обнаружено, однако последние исследования подтверждают, что там находится большое скопление межпланетной пыли.
Известна «Международная аэрокосмическая система глобального мониторинга (МАКСМ)» - прототип. Патенте №2465729 B64G 99/00 (МКП 2009.01), 2010 г. Космический сегмент системы реализуется таким образом, что два космических аппарата с инфракрасными телескопами на борту располагают на орбите Земли с опережением и отставанием от нее на расстояниях ~0,1 а.е. и 0,7 а.е., соответственно, направляют оси вращения космических аппаратов на Землю, вращают оба космических аппарата вокруг собственных осей с постоянной угловой скоростью, телескопы располагают под некоторыми углами к осям вращения космических аппаратов и создают тем самым барьерную зону обзора вокруг Земли, а при обнаружении небесного тела, движущегося к Земле, информацию о его движении передают на космический аппарат с длиннофокусным инфракрасным телескопом на борту, размещенным в точке Лагранжа L1 системы Солнце-Земля, направляют длиннофокусный телескоп на обнаруженное небесное тело и определяют его угловые положения относительно всех трех телескопов, при этом в телескопах в качестве приемника излучения применяют приборы с зарядовой связью (ПЗС) в режиме временной задержки и накопления (ВЗН) заряда.
Недостатками данной космической системы является необходимость наличия инфракрасного телескопа в точке Лагранжа L1, что существенно сокращает срок активного существования специализированной космической системы оперативного мониторинга астероидной и кометной опасности и зависит от первоначального объема хладагента для охлаждения элементов оптической схемы телескопа. Недостатком является также то, что в процессе функционирования инфракрасных телескопов в режиме вращения для создания барьерной зоны, неизбежна засветка со стороны Солнца элементов телескопа, находящихся перед входным зрачком оптической схемы телескопа, например, частей внутренних поверхностей бленд инфракрасных телескопов, что вызывает их разогрев и возникновение фоновой засветки оптического тракта инфракрасного телескопа в его рабочем диапазоне спектра. В наибольшей степени засветка влияет на функционирование телескопа, находящегося на расстоянии 0,1 а.е. от Земли. Это приводит к снижению соотношения сигнал/шум на приемнике излучения и, соответственно, к ухудшению пороговой чувствительности инфракрасного телескопа. Наиболее эффективным способом устранения этого недостатка является ориентация инфракрасного телескопа в плоскости перпендикулярной направлению на Солнце и в направлении от Земли, но в этом случае невозможно создание барьерной зоны вокруг Земли с помощью инфракрасных телескопов. Так, к примеру, телескоп WISE находится на солнечно-синхронной орбите, и его оптическая ось всегда направлена в противоположную сторону относительно направления на центр Земли и отстоит на 90° от направления на центр диска Солнца (https://ru.wikipedia.org/wiki/Wide-Field_Infrared_Survey_Explorer). Именно это и обеспечивает его эффективное функционирование в инфракрасном диапазоне за счет отсутствия засветки со стороны Солнца и оптимальных условий для экономного расходования запасенного при старте хладагента.
В тоже время, в виду существенной удаленности инфракрасного телескопа в точке Лагранжа L1, имеются существенные трудности информационного обмена в реальном времени с наземными пунктами приема и обработки оперативной информации, поскольку возможно необходим специализированный космический аппарат-ретранслятор.
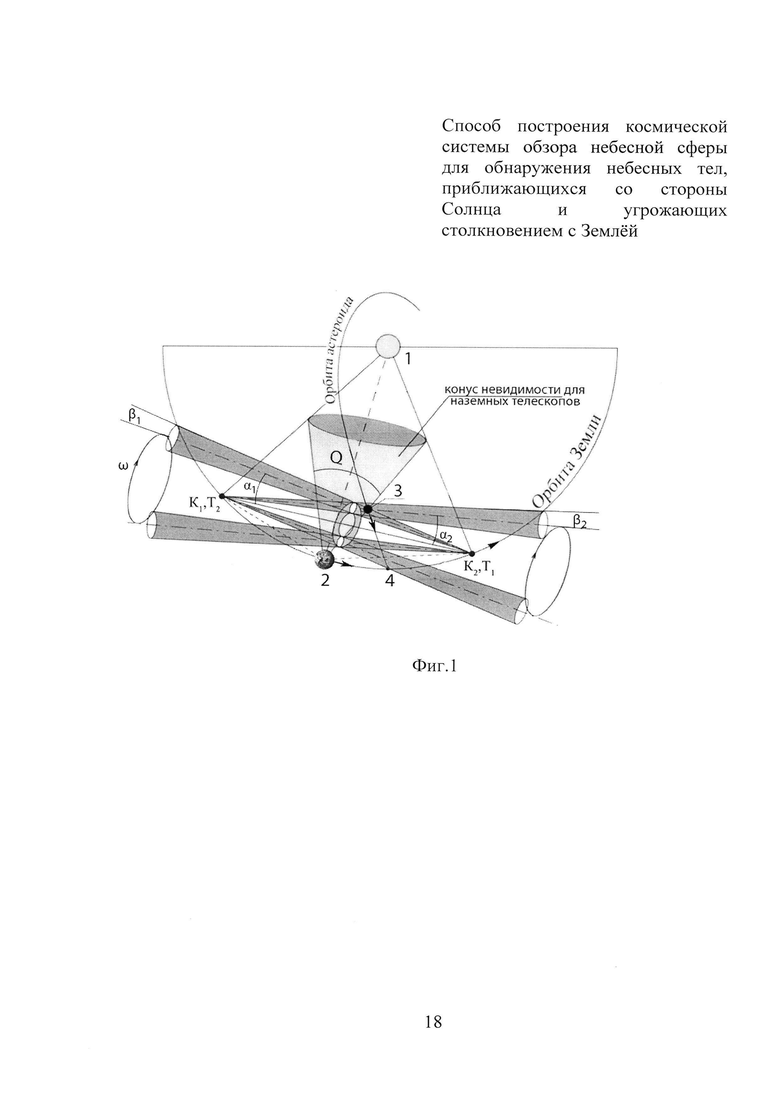
Целью предлагаемого изобретения - способа построения космической системы обзора небесной сферы для обнаружения небесных тел, приближающихся со стороны Солнца и угрожающих столкновением с Землей, является сокращение группировки космических аппаратов за счет отсутствия необходимости размещения дополнительного космического аппарата в точке Лагранжа L1 и повышение быстродействия космической системы за счет сокращения обзора околоземного космического пространства только в пространстве между Землей и Солнцем (фиг. 1).
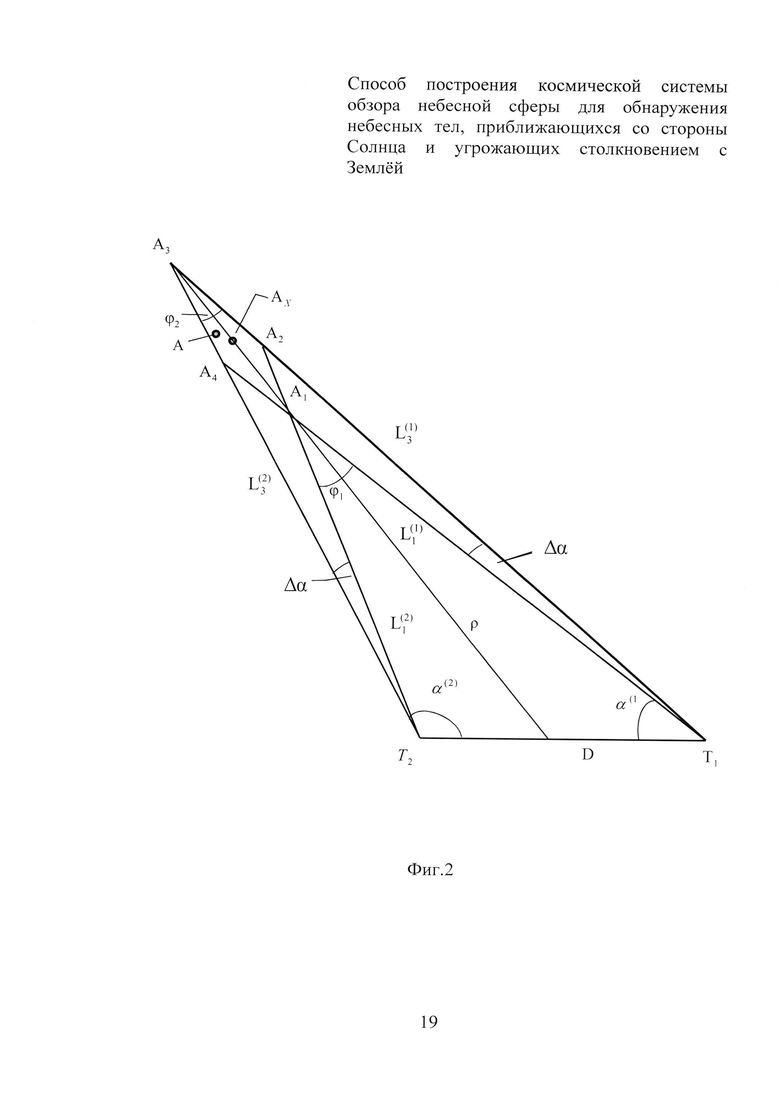
Указанная цель достигается тем, что оси вращения космических аппаратов T1 и Т2, (фиг. 2) расположенных на орбите Земли с опережением и отставанием, находятся в пределах от 0,2 до 0,5 астрономической единицы и направлены в расчетные точки К1 и К2 расположенные также на орбите Земли таким образом, что поля зрения телескопов, расположенные под некоторыми углами к осям вращения космических аппаратов, описывают конические поверхности в пространстве между Землей и Солнцем, а при обнаружении небесного тела в поле зрения телескопа одного из космических аппаратов, вращение обоих космических аппаратов прекращают, переводят космический аппарат, обнаруживший небесное тело в режим сопровождения, и обеспечивают постоянное направление поля зрения телескопа этого космического аппарата на обнаруженное небесное тело, телескоп второго космического аппарата также переводят в режим сопровождения обнаруженного небесного тела, при этом ориентируют поле зрение телескопа на первый космический аппарат и осуществляют разворот в плоскости, содержащей оба космические аппарата и обнаруженное небесное тело до появления его в поле зрения второго телескопа, и в режиме совместного сопровождения обнаруженного небесного тела обоими телескопами выполняют триангуляционные измерения с учетом расстояния D между космическими аппаратами для определения параметров орбиты обнаруженного небесного тела.
Если оси вращения космических аппаратов T1 и Т2 для осуществления способа, направленные в точки К1 и К2 на орбите Земли, которые совпадают с расположениями космических аппаратов T2 и Т1 соответственно, то при этом оси вращения космических аппаратов направлены вдоль линии, соединяющей эти космические аппараты.
Расстояние D между телескопами, находящимися на орбите Земли для реализации способа определяют соотношением
где ΔА - требуемая точность определения положения небесного тела в околоземном пространстве;
L - расстояние до небесного тела;
Δα - угловое разрешение телескопа.
Два космических аппарата Т1 и Т2 (фиг. 2) с телескопами на борту, размещаемые на орбите обращения Земли вокруг Солнца на расстоянии D друг от друга, которое превышает в 103 - 104 раз возможные расстояния между наземными телескопами. Отсюда априори следуют преимущества синхронно - базисных наблюдений, проводимых космическими телескопами в режиме сопровождения небесного тела, обнаруженного одним из телескопов.
Ромб А1А2А3А4 является возможной зоной неопределенности положения обнаруженного небесного тела.
Величины  и
и  - минимальное и максимальное значения квазидальностей от телескопа Т2 до точек А1 и А3, а величины L1(1) и L3(1) - минимальное и максимальное значения квазидальностей от телескопа T1 до точек А1 и А3 ромба неопределенности положения обнаруженного небесного тела; ϕ1 и ϕ2 - максимальное и минимальное значения угла между квазидальностями от небесного тела до телескопов T1 и Т2; α(1) и α(2) - углы между базой D и минимальными квазидальностями L1(1), L1(2); ρ - расстояние между серединой базы D и Ах - средним возможным положением небесного тела, являющимся центром ромба.
- минимальное и максимальное значения квазидальностей от телескопа Т2 до точек А1 и А3, а величины L1(1) и L3(1) - минимальное и максимальное значения квазидальностей от телескопа T1 до точек А1 и А3 ромба неопределенности положения обнаруженного небесного тела; ϕ1 и ϕ2 - максимальное и минимальное значения угла между квазидальностями от небесного тела до телескопов T1 и Т2; α(1) и α(2) - углы между базой D и минимальными квазидальностями L1(1), L1(2); ρ - расстояние между серединой базы D и Ах - средним возможным положением небесного тела, являющимся центром ромба.
В качестве среднеквадратической погрешности определения дальности, принимаем половину максимального размера ромба возможных положений небесного тела, то есть, расстояние ΔА подлежащее определению. Погрешность ΔА зависит от расстояния D между телескопами, углов α(1) и α(2) и угловой погрешности измерения Δα=Δα(1)=Δα(2).
Из фиг. 1 следуют соотношения:

Из треугольника Т2А1А3 получаем

Из треугольника T2A1T1 имеем
Из треугольника T2A3T1 получаем
Полагаем, что погрешность ΔА по порядку величины равна половине максимальной разности квазидальностей L3(2) и L1(2), поскольку угол Δα очень мал. Тогда

Это выражение можно привести к виду

Вследствие малости угла Δα выражение (cosΔα - cos2 Δα) ~ 3/2 Δα2 и равно 0.
Используя представления для sin ϕ1 = sin(α(1)+α(2)) и для cosϕ1 = -cos(α(1)+α(2)), получаем формулу

По теореме косинусов находим углы α(1) и α(2)

Среднеквадратическая погрешность определения дальности до небесного тела ΔА определяется известными величинами D, погрешностью Δα и величинами L1(2) и L1(1).
При принятых исходных данных для случая α(1)=α(2)=α, ΔА имеет вид
Учитывая, что при равенстве углов α(1) и α(2) выполняется соотношение L⋅cos α=D/2, получим:
Если α(1)=α(2)=α и при этом небесное тело находится от наблюдателей на расстоянии L=L1(2)=L1(1), на порядки превышающем величину базы D между телескопами, то α ~π/2, тогда
Для повышения помехоустойчивости космической системы по заявленному способу спектральным диапазоном оптического тракта космических телескопов является видимый диапазон, поскольку излучение вне поля зрения эффективно может быть устранено с помощью бленды, а нагрев внутренних частей бленды от солнечной засветки дает излучение в диапазоне вне спектральной чувствительности космического телескопа.
Для определения возможных негативных последствий падения небесного тела на земную поверхность, важным является определение физико-химических характеристик обнаруженного небесного тела, угрожающим столкновением с Землей. Для этого при осуществлении заявленного способа, на борту космического аппарата дополнительно к телескопам устанавливают измерительную аппаратуру для определения физико-химических характеристик небесного тела.
Выбор оптимальных расстояний  и
и  между космическими аппаратами и Землей зависит от затрат характеристической скорости для вывода космических аппаратов на орбиту Земли
между космическими аппаратами и Землей зависит от затрат характеристической скорости для вывода космических аппаратов на орбиту Земли  и
и  и требуемого запаса характеристической скорости Vx1 и Vx2 для поддержания неизменным расстояние между Землей и космическими аппаратами T1 и Т2.
и требуемого запаса характеристической скорости Vx1 и Vx2 для поддержания неизменным расстояние между Землей и космическими аппаратами T1 и Т2.
Наиболее энергозатратным является выведение космического аппарата Т1 с опережением Земли [2] и в зависимости от расстояния  a.e. характеристическая скорость для вывода космического аппарата на орбиту Земли составляет:
a.e. характеристическая скорость для вывода космического аппарата на орбиту Земли составляет:

Для космического аппарата с отставанием от Земли затраты характеристической скорости составляют:

Для расстояний от 0,2 а.е. до 0,35 а.е. затраты характеристической скорости для вывода космических аппаратов на орбиту Земли существенно не возрастают.
При функционировании КА на орбите Земли на расстояниях и на них действует возмущающее ускорение Земли  . При небольших расстояниях и возмущающее ускорение практически перпендикулярно вектору центростремительного ускорения
. При небольших расстояниях и возмущающее ускорение практически перпендикулярно вектору центростремительного ускорения  от Солнца к Земле, где VЗ - скорость обращения Земли вокруг Солнца, VЗ = 29,85 км/с, радиус орбиты Земли RoЗ = 1 а.е. = 1,5⋅108 км. Ускорение qc = 6⋅10-3 м/с2.
от Солнца к Земле, где VЗ - скорость обращения Земли вокруг Солнца, VЗ = 29,85 км/с, радиус орбиты Земли RoЗ = 1 а.е. = 1,5⋅108 км. Ускорение qc = 6⋅10-3 м/с2.
При условии, что  практически нормально к qc
практически нормально к qc
где: qЗ = 9,81 м/с2, RЗ - радиус Земли, 6,37⋅103 км,  - расстояние между Землей и КА на ее орбите в км.
- расстояние между Землей и КА на ее орбите в км.
Для компенсации возмущения, которое стремится уменьшить расстояния  и
и  необходимо производить коррекцию орбит космических аппаратов T1 и Т2. Характеристическая скорость, необходимая для компенсации возмущения в течение срока активного функционирования космического ппарата, равного τас ~ 10 лет, равна
необходимо производить коррекцию орбит космических аппаратов T1 и Т2. Характеристическая скорость, необходимая для компенсации возмущения в течение срока активного функционирования космического ппарата, равного τас ~ 10 лет, равна
Размерность τас в секундах, a Vx в м/с.

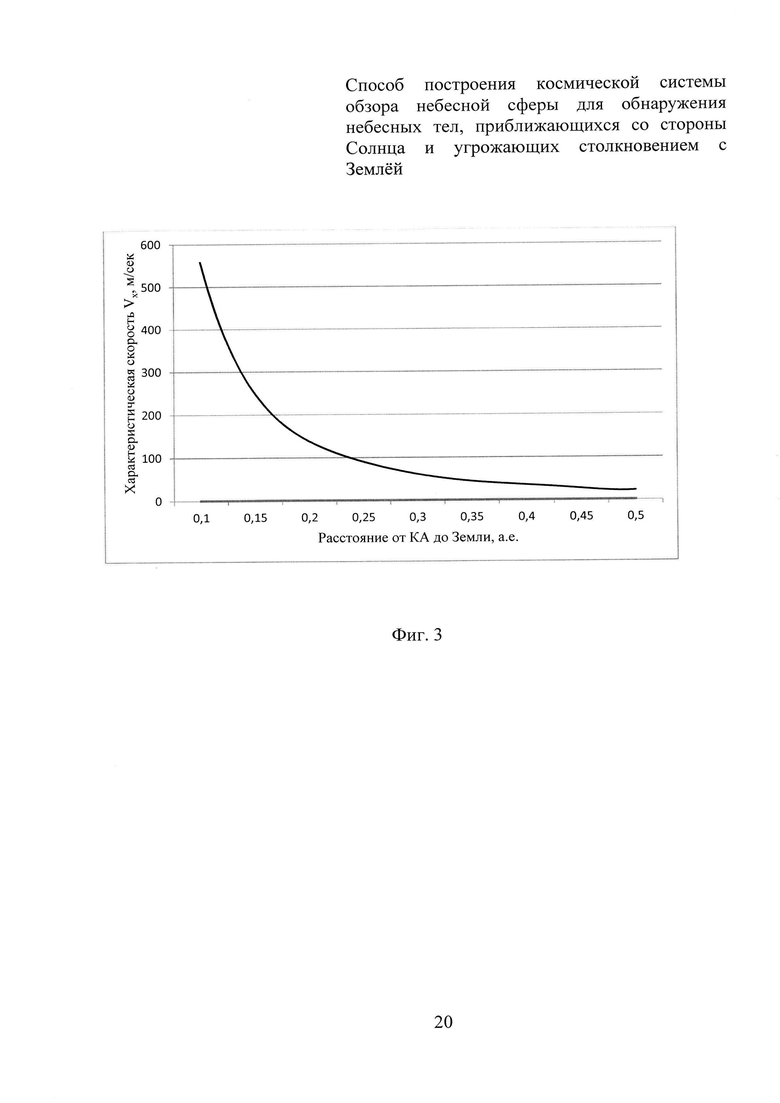
Функция характеристической скорости Vx от расстояния наилучшим образом аппроксимируется на отрезке  полиномиальным уравнением 6-й степени следующего вида
полиномиальным уравнением 6-й степени следующего вида

Достоверность аппроксимации R2 = 1.
График зависимости  представлен на фиг. 3.
представлен на фиг. 3.
Из приведенных расчетов следует, что при  а.е. требуемый запас характеристической скорости на поддержание орбиты равен 22 м/с. При
а.е. требуемый запас характеристической скорости на поддержание орбиты равен 22 м/с. При  а.е. требует увеличения запаса характеристической скорости на 117 м/с до 139 м/с, что является приемлемой величиной. Расположение космического аппарата ближе 0,2 а.е. к Земле требует значительного увеличения запаса характеристической скорости и энергозатрат на поддержание космического аппарата на заданном расстоянии от Земли на ее орбите. Так приближение космического аппарата к Земле на 0,05 а.е. от 0,2 а.е. до 0,15 а.е. требует увеличения запаса характеристической скорости на 109 м/с (от 139 м/с до 248 м/с.
а.е. требует увеличения запаса характеристической скорости на 117 м/с до 139 м/с, что является приемлемой величиной. Расположение космического аппарата ближе 0,2 а.е. к Земле требует значительного увеличения запаса характеристической скорости и энергозатрат на поддержание космического аппарата на заданном расстоянии от Земли на ее орбите. Так приближение космического аппарата к Земле на 0,05 а.е. от 0,2 а.е. до 0,15 а.е. требует увеличения запаса характеристической скорости на 109 м/с (от 139 м/с до 248 м/с.
Удаление космического аппарата более чем на 0,5 а.е. требует наличия космических аппаратов-ретрансляторов, приводит к сложности связи с наземными пунктами обработки информации и снижает быстродействие космической системы оперативного предупреждения о возможном столкновении небесного тела с Землей.
Анализируя приведенные данные и проведенные расчеты можно заключит, что наиболее рациональным с точки зрения энергозатрат и поддержания связи с космическим аппаратом является размещение космического аппарата на орбите Земли на расстояниях 0,2÷0,5 а.е. от нее.
Фиг. 2. Схема измерений параметров движения обнаруженного небесного тела
Т1 - телескоп 1;
Т2 - телескоп 2;
D - расстояние между телескопами;
А1А2А3А4 - область неопределенности положения небесного тела;
Ах - возможное положение небесного тела в области неопределенности;
ρ - расстояние от точки AX до середины D;
 - расстояния от телескопов до граничных точек А1 и А3 области неопределенности;
- расстояния от телескопов до граничных точек А1 и А3 области неопределенности;
α(1) - угол между направлениями T1T2 и Т1А1;
α(2) - угол между направлениями T2T1 и Т2А1;
ϕ1 - угол между направлениями A1T1 и A1T2;
ϕ2 - угол между направлениями А3Т1 и А3Т2;
Δα - угловая погрешность единичного измерения положения НТ.
Фиг. 1. Схема обзора околоземного космического пространства.
1 - Солнце;
2 - Земля;
3 - астероид;
4 - точка встречи астероида с Землей;
T1 - КА с телескопом 1;
Т2 - КА с телескопом 2;
ω - угловая скорость вращения полей зрения телескопов 1 и 2;
α1, и α2 - углы между осями вращения космических аппаратов Т1 и Т2 и осями телескопов, установленных на них;
Q - угол конуса невидимости наземными телескопами;
К1 и К2 - расчетные точки на орбите Земли для ориентации осей вращения космических аппаратов Т1 и Т2;
β1, β2 - углы полей зрения телескопов 1 и 2.
Фиг. 3 Необходимый запас характеристической скорости  для поддержания космического аппарата на орбите в зависимости от дальности
для поддержания космического аппарата на орбите в зависимости от дальности  до Земли.
до Земли.
Литература
1. К.Н Свиридов. Оптическая локация космического мусора. - М: Знание, 2006, стр. 413-437.
2. В.А. Емельянов, С.С. Климов. Применение космических телескопов для обнаружения опасных небесных тел и определения параметров их орбит. Космонавтика и ракетостроение, №2 (63), 2011, стр. 100-105.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| Космическая система обзора небесной сферы для наблюдения небесных объектов и обнаружения опасных для Земли небесных тел - астероидов и комет | 2015 |
|
RU2610066C1 |
| СПОСОБ ОБЗОРА КОСМИЧЕСКОГО ПРОСТРАНСТВА МЕЖДУ СОЛНЦЕМ И ЗЕМЛЁЙ, НЕДОСТУПНОГО ДЛЯ НАБЛЮДЕНИЯ ОПТИЧЕСКИМИ СРЕДСТВАМИ, НАХОДЯЩИМИСЯ НА ЗЕМЛЕ И НА ОКОЛОЗЕМНЫХ ОРБИТАХ, ИЗ-ЗА ИХ ЗАСВЕТКИ СОЛНЦЕМ, С КОСМИЧЕСКОГО АППАРАТА, РАЗМЕЩЁННОГО НА ОРБИТЕ ЗЕМЛИ НА ПОСТОЯННОМ РАССТОЯНИИ ОТ ЗЕМЛИ | 2015 |
|
RU2597028C1 |
| СПОСОБ МОНИТОРИНГА АСТЕРОИДНО-КОМЕТНОЙ ОПАСНОСТИ | 2014 |
|
RU2573509C1 |
| Способ обнаружения опасных небесных тел, приближающихся к Земле с дневного неба, и космическая система для его реализации СОДА-2 | 2017 |
|
RU2675205C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| Способ наблюдения за астероидами по всей небесной сфере | 2020 |
|
RU2753200C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
Изобретение относится к спутниковым системам обнаружения, наблюдения и мониторинга небесных тел Солнечной системы, угрожающих столкновением с Землей. Способ включает размещение двух космических аппаратов с телескопами Т1 (КА Т1) и Т2 (КА Т2) на орбите Земли (2) вокруг Солнца (1). Оба КА вращают с постоянной угловой скоростью вокруг их продольных осей, например, вокруг линии, соединяющей T1 и Т2. Поля зрения телескопов описывают конические поверхности. При обнаружении небесного тела (3) в поле зрения телескопа (например, КА Т2) вращение обоих КА прекращают, переводят КА Т2 в режим сопровождения, а приемники излучения - в режим кадровой регистрации сигнала, постоянно направляя поле зрения телескопа Т2 на тело (3). Поле зрение телескопа T1 второго КА T1 ориентируют на первый КА Т2 и разворачивают в плоскости T1-(3)-Т2 до появления тела (3) в поле зрения телескопа T1. Сопровождают небесное тело (3) обоими телескопами, выполняя измерения для определения параметров его орбиты. Техническим результатом являются сокращение группировки КА и повышение быстродействия системы. 3 з.п. ф-лы, 3 ил., 3 табл.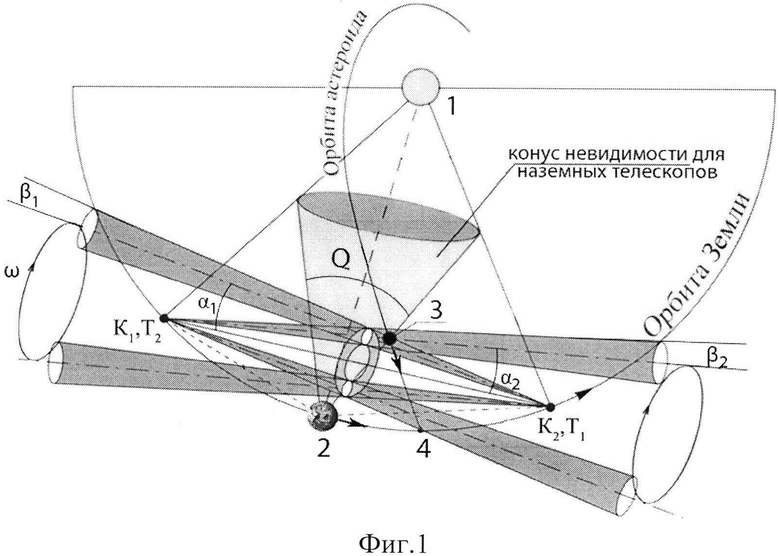
1. Способ построения космической системы обзора небесной сферы, в котором два космических аппарата Т1 и Т2 располагают на орбите обращения Земли вокруг Солнца, при этом один аппарат опережает Землю, а второй отстает от нее, на каждом космическом аппарате устанавливают телескоп под некоторым углом к продольной оси вращения космического аппарата, при этом в обзорно-поисковом режиме небесных тел, приближающихся к Земле со стороны Солнца в околоземном пространстве, оба космических аппарата вращают одновременно с постоянной угловой скоростью вокруг собственных продольных осей, в телескопах в качестве приемников излучения применяют приборы с зарядовой связью в режиме временной задержки и накопления заряда, отличающийся тем, что оси вращения космических аппаратов T1 и Т2, направляют в точки К1 и К2, расположенные на орбите Земли таким образом, что поля зрения телескопов описывают конические поверхности в пространстве между Землей и Солнцем, а при обнаружении небесного тела в поле зрения телескопа одного из космических аппаратов вращение обоих космических аппаратов прекращают, переводят космический аппарат, обнаруживший небесное тело, в режим сопровождения, приемники излучения переводят в режим кадровой регистрации сигнала, обеспечивают постоянное направление поля зрения телескопа, обнаружившего небесное тело космического аппарата, на обнаруженное небесное тело, а поле зрение телескопа второго космического аппарата ориентируют на первый космический аппарат и осуществляют разворот в плоскости, содержащей оба космических аппарата и обнаруженное небесное тело, до появления этого небесного тела в поле зрения телескопа второго космического аппарата, и при совместном сопровождении обнаруженного небесного тела обоими телескопами выполняют триангуляционные измерения с учетом расстояния D между космическими аппаратами для определения параметров орбиты обнаруженного небесного тела.
2. Способ по п.1, отличающийся тем, что космические аппараты располагают на расстоянии D в зависимости от требуемой точности определения положения небесного тела в околоземном пространстве, при этом
 ,
,
где ΔА - требуемая точность определения положения небесного тела в околоземном пространстве;
L - расстояние до небесного тела;
Δα - угловое разрешение телескопа на борту космического аппарата.
3. Способ по п.2, отличающийся тем, что космические аппараты размещают на орбите Земли на расстояниях 0,2÷0,5 а.е. от нее.
4. Способ по п.1, отличающийся тем, что точки К1 и К2 на орбите Земли совмещают с расположениями космических аппаратов Т2 и Т1 соответственно, при этом оси вращения космических аппаратов направлены вдоль линии, соединяющей эти космические аппараты.
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ СИСТЕМА ГЛОБАЛЬНОГО МОНИТОРИНГА (МАКСМ) | 2010 |
|
RU2465729C2 |
| СПОСОБ МОНИТОРИНГА АСТЕРОИДНО-КОМЕТНОЙ ОПАСНОСТИ | 2014 |
|
RU2573509C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| WO 2001080158 A1, 25.10.2001 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

