Способ обзора космического пространства между Солнцем и Землей, недоступного для наблюдения оптическими средствами, находящимися на Земле и на околоземных орбитах, из-за их засветки Солнцем, с космического аппарата, размещенного на орбите Земли на постоянном расстоянии от Земли.
Целью настоящего изобретения является обнаружение и наблюдение небесных тел в области космического пространства между Солнцем и Землей с КА, размещенного на орбите Земли на постоянном расстоянии от Земли, с высокой оперативностью обнаружения опасных небесных тел (астероидов и комет).
Изобретение включает способ обзора космического пространства между Солнцем и Землей, недоступного для наблюдения оптическими средствами, находящимися на Земле и на околоземных орбитах, из-за их засветки Солнцем, для обнаружения небесных тел с одного или двух космических аппаратов, расположенных на орбите Земли на постоянном расстоянии от нее. Один космический аппарат располагается впереди Земли, а другой - позади.
Известны способы обзора небесной сферы, включающие в себя и обзор космического пространства между Солнцем и Землей, которые можно рассматривать как аналоги настоящего изобретения.
В [1] предлагается осматривать сферу вокруг Земли диаметром 2,6 миллионов километров двумя космическими телескопами, установленными в точках Лагранжа L4 и L5.
В [2] описан способ осмотра окрестностей Земли из точки Лагранжа L1.
Статьи [3], [4] и [5] содержат описание барьерной зоны вокруг Земли, создаваемой вращающимися полями телескопов, установленных впереди и позади Земли на ее орбите.
В качестве прототипа способа обзора космического пространства между Солнцем и Землей, недоступного для наблюдения оптическими средствами, находящимися на Земле и на околоземных орбитах, принят способ обзора космического пространства, описанный в [6].
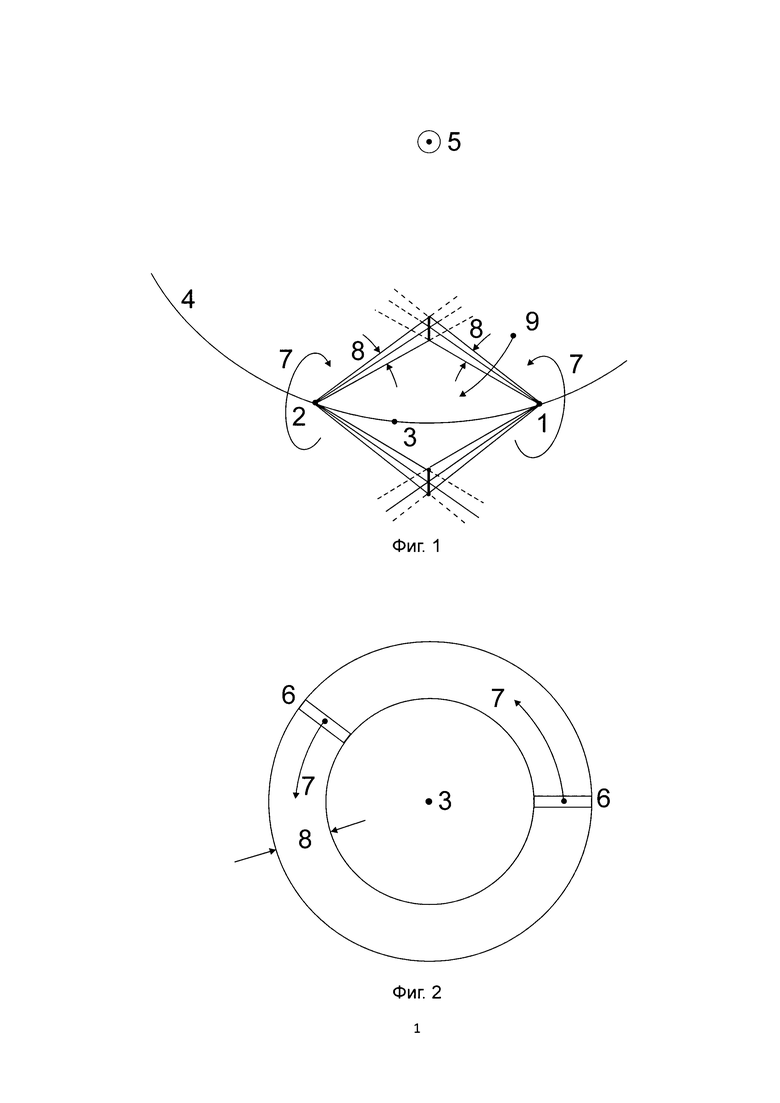
Два космических аппарата (КА) 1 и 2, показанные на фиг. 1, размещаются на фиксированных расстояниях от Земли 3 на ее орбите 4 вокруг Солнца 5. КА 1 установлен впереди Земли на удалении от нее 0,3 астрономические единицы (а.е.) (1 а.е. равна 150 миллионов километров), КА 2 установлен позади Земли на удалении 0,15 а.е.
На каждом описанным в прототипе КА установлен телескоп с фотоприемным устройством, представляющим собой прибор с зарядовой связью (ПЗС), работающий в режиме временной задержки и накопления зарядов (ВЗН). Поле зрения телескопа, формируемое ПЗС-линейкой 6 (фиг. 2), имеет размер (6×0,1) градусов и вращается вокруг направления на Землю.
При вращении 7, показанном на фиг. 1 и фиг. 2, ПЗС-линейка ориентируется таким образом, что формируется кольцевая полоса сканирования, ширина 8 которой составляет 6 градусов. При этом точечные изображения перемещаются вдоль накопительных столбцов линейки, что обеспечивает возможность реализации режима ВЗН.
Таким образом, при вращении полей зрения телескопов обоих КА образуется барьерная зона вокруг Земли с угловой шириной 6 градусов, имеющая форму двух конусов с вершинами в точках 1 и 2. Опасное небесное тело, движущееся по траектории 9 столкновения с Землей (фиг. 1) с любой стороны, в том числе со стороны Солнца, неизбежно пересечет барьерную зону.
При выполнении задачи обнаружения опасных небесных тел в области между Солнцем и Землей, недоступной для наблюдения с Земли и с околоземных орбит, указанный прототип обладает следующим недостатком: при вращении поля зрения телескопов сканируют не только область между Солнцем и Землей, недоступную для наблюдения с Земли и с геоцентрических орбит, но и выходят из нее, причем до 70 процентов времени тратится непроизводительно на обзор области космического пространства, которую можно контролировать с Земли и с космических аппаратов, находящихся на околоземных орбитах.
Технический результат предлагаемого изобретения заключается в обеспечении минимально возможного времени обзора области космического пространства, недоступной для наблюдения с Земли и с околоземных орбит оптической аппаратурой из-за засветки Солнцем.
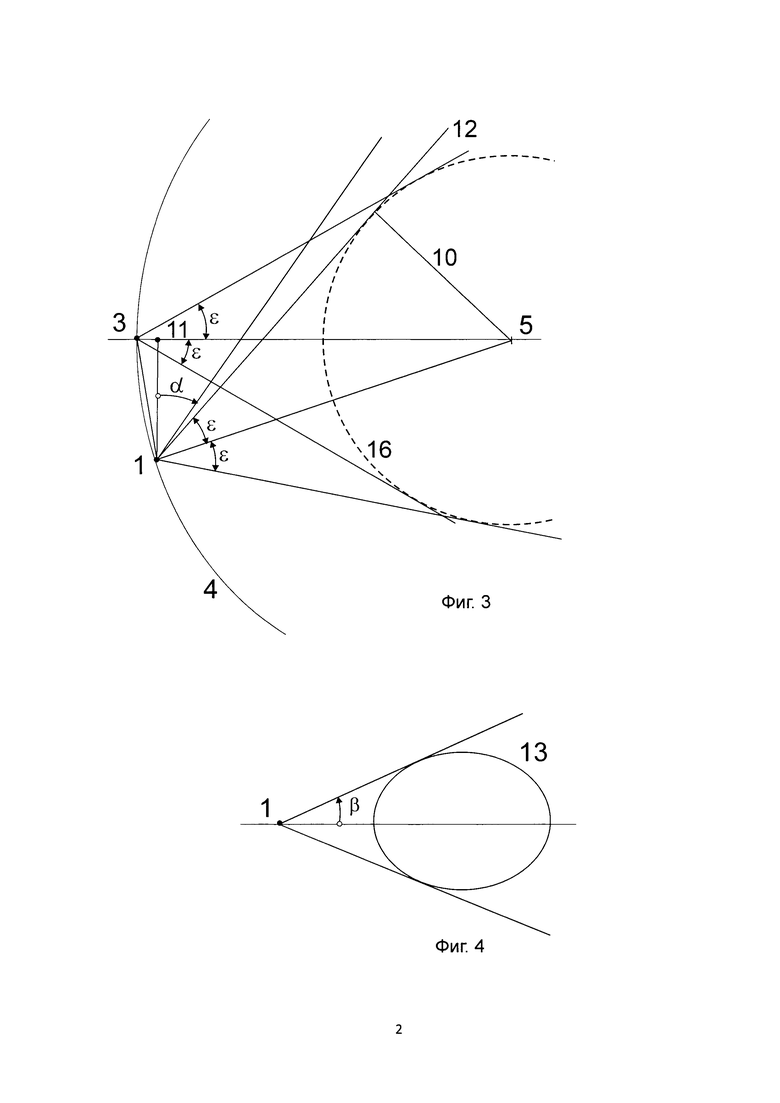
Указанный технический результат достигается тем, что область наблюдения космического пространства, которую невозможно контролировать с Земли 3 и с околоземных орбит, задают в форме конуса с вершиной на Земле и осью, направленной на Солнце (фиг. 3). Угол при вершине конуса находится в диапазоне от 40 градусов до 60 градусов.
В пределах этого конуса невозможно наблюдение данной области космического пространства между Солнцем и Землей оптическими средствами с Земли и с околоземных орбит.
С помощью аппаратуры наблюдения с космического аппарата 1, размещенного на орбите Земли на постоянном расстоянии от Земли, возможно обнаружение небесных тел в пространстве внутри конуса с вершиной на Земле и осью, направленной на Солнце. В дальнейшем это пространство называется доступным пространством внутри контура конуса (фиг. 3). Доступное пространство является двумерным и характеризуется двумя взаимно перпендикулярными угловыми координатами - азимутом и углом места.
Пунктиром на фиг. 3 показана круговая граница области засветки в плоскости эклиптики, которую невозможно наблюдать из любой точки на орбите Земли с углом засветки ε аппаратуры наблюдения. Радиус 10 этого круга равен радиусу орбиты Земли, умноженному на sinε. В трехмерном пространстве область засветки является сферой того же радиуса, вокруг которой описан конус. То обстоятельство, что наблюдение небесной сферы производится также с околоземных орбит, мало сказывается на размерах и конфигурации конуса. Поскольку удаление околоземных орбит от центра Земли не превышает (40-50) тысяч километров, это удаление можно рассматривать как пренебрежимо малую величину по сравнению с дальностью до Солнца 150 миллионов километров.
Причем доступное пространство внутри контура конуса, в пределах которого возможно обнаружение небесных тел с космического аппарата 1, ограничивают со стороны Солнца углом засветки Солнцем аппаратуры наблюдения космического аппарата.
Производят последовательный обзор полем зрения аппаратуры наблюдения космического аппарата всего доступного пространства внутри контура конуса. При этом задают в зависимости от фона наблюдаемой части небесной сферы время экспозиции для различных положений поля зрения аппаратуры наблюдения космического аппарата внутри контура конуса. Регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
Кроме того, после завершения цикла обзора всего доступного пространства внутри контура конуса продолжают повторные циклы обзора данного пространства, регистрируют полученную информацию и передают ее на наземные средства приема информации для ее последующей обработки, по результатам которой определяют параметры движения обнаруженных небесных тел, в том числе приближающихся к Земле со стороны Солнца.
Кроме того, на гелиоцентрической орбите располагают два космических аппарата - один впереди Земли, второй позади нее, при этом каждый космический аппарат осматривает все доступное пространство внутри контура конуса, заданного для наблюдения данному космическому аппарату.
Существует вариант, в котором обзор всего доступного пространства внутри контура конуса производят в режиме покадровой съемки с заданным временем экспозиции отдельных кадров, которые покрывают все доступное пространство внутри контура конуса, регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
Существует вариант, в котором последовательный обзор всего доступного пространства внутри контура конуса производят в режиме сканирования по полосам с заданной угловой скоростью с использованием матричных приборов с зарядовой связью со считыванием сигналов в режиме с временной задержкой и накоплением, причем задают угловую скорость и направление сканирования и полностью покрывают все доступное пространство полосами сканирования с шириной, определенной размером поля зрения аппаратуры наблюдения космического аппарата, и длиной, ограниченной размером конуса в направлении сканирования, регистрируют полученную при этом информацию и передают ее на наземные средства приема информации для последующей обработки.
Существует вариант, в котором при обзоре космического пространства выделяют ограниченную область в доступном пространстве внутри контура конуса и производят наблюдение в пределах этой области.
Предлагаемый способ обзора космического пространства поясняется чертежами на фиг. 3, фиг. 4, фиг. 5.
Фиг. 3 изображает геометрию наблюдения космического пространства в проекции на плоскость эклиптики.
Фиг. 4 изображает сечение конуса плоскостью, перпендикулярной эклиптике, при заданном азимутальном угле наблюдения.
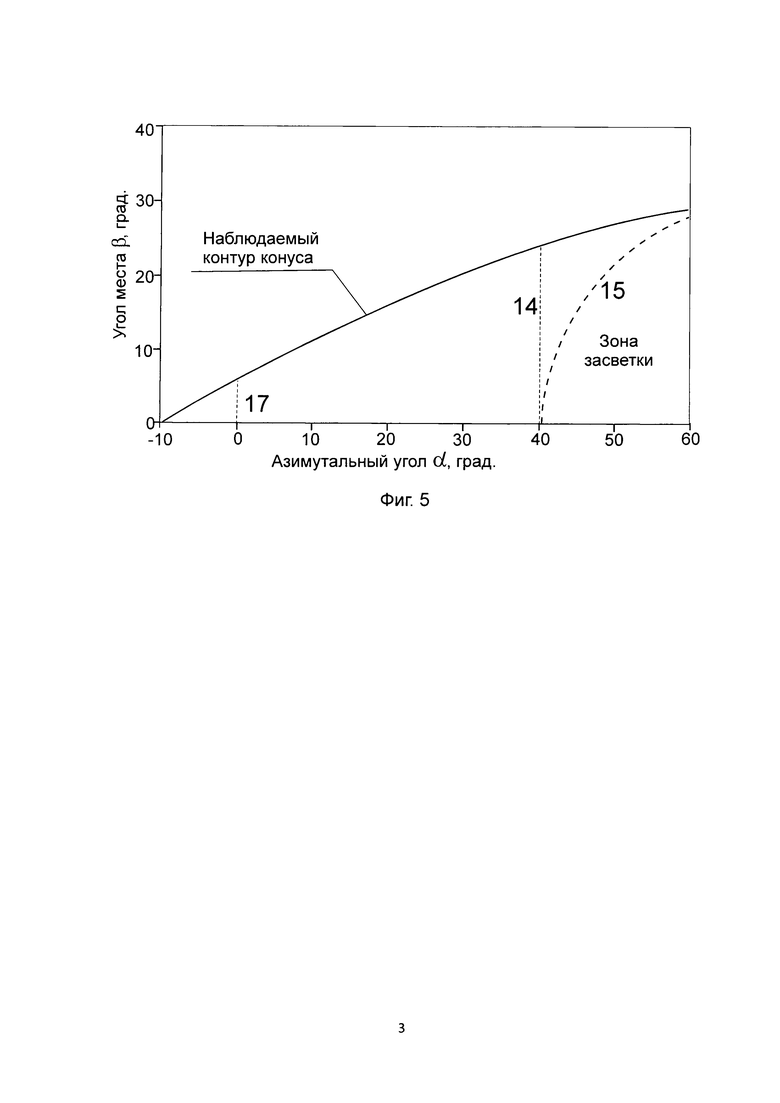
Фиг. 5 показывает половину контура конуса, в пределах которого аппаратура наблюдения должна обнаруживать астероиды и кометы, сближающиеся с Землей.
Способ обзора космического пространства между Солнцем и Землей, недоступного для наблюдения оптическими средствами, находящимися на Земле и на околоземных орбитах, из-за их засветки Солнцем, с космического аппарата, размещенного на орбите Земли на постоянном расстоянии от Земли, реализуется следующим образом.
Космический аппарат выводится на орбиту Земли 4, например, в точки Лагранжа L4, L5 или в менее удаленную от Земли точку ее орбиты.
В качестве примера применения предлагаемого способа обзора космического пространства рассмотрен вариант размещения космического аппарата на орбите Земли на постоянном расстоянии впереди Земли.
В нижеприведенных расчетах удаление космического аппарата 1 от Земли 3 принимается равным 1/3 астрономической единицы, то есть 50 миллионов километров. На таком расстоянии существующие радиолинии обеспечат управление КА и передачу на Землю получаемой информации. Угол засветки ε аппаратуры наблюдения как на Земле 3 и околоземных орбитах, так и на космическом аппарате 1 принимается равным 30 градусам.
Для реализации предлагаемого способа производят последовательный обзор полем зрения аппаратуры наблюдения космического аппарата 1 всего доступного пространства внутри контура конуса между Землей 3 и Солнцем 5.
Угол при вершине этого конуса определяется углом ε засветки аппаратуры наблюдения на Земле и на околоземных орбитах и составляет 2ε.
Для оценки в квадратных градусах наблюдаемой площади внутри контура конуса, подлежащей контролю с КА, необходимо рассчитать угловые границы наблюдаемого с КА контура конуса на расчетной небесной сфере, в центре которой находится КА. При этом используется следующая система угловых координат, характеризующих контур конуса:
- азимутальный угол α, отсчитываемый в плоскости эклиптики от направления перпендикуляра, опущенного от КА1 на линию Земля - Солнце в точку 11;
- угол места β от плоскости эклиптики до точки наблюдаемого контура конуса, отсчитываемый на данном азимуте α в плоскости, перпендикулярной эклиптике.
Ввиду симметрии наблюдаемого контура конуса для северной и южной полусфер относительно эклиптики далее рассматривается только контур конуса в северной полусфере.
Сектор азимутальных углов α наблюдения области подлета астероидов и комет от Солнца к Земле в плоскости эклиптики в данном расчете принимается в интервале от направления из точки нахождения КА 1 в точку 3 до направления 12 (фиг. 3), характеризующего границу недоступности для наблюдения с КА 1. Очевидно, что в этом интервале сечения конуса с вершиной в точке 3 являются эллиптическими. На фиг. 4 показано сечение конуса при азимутальном угле α. Для этого сечения рассчитывается угол места β, характеризующий верхнюю касательную, проведенную из точки нахождения КА 1 к эллипсу 13.
Таким образом, получена функциональная зависимость β(α), представляющая границу контура конуса, недоступного для наблюдений с Земли 3, но хорошо наблюдаемого сбоку из точки нахождения КА 1. Эта зависимость показана на фиг. 5.
Следует отметить, что при наблюдении из точки нахождения КА 1 в направлениях, не лежащих в плоскости эклиптики, но пересекающих конус, азимуты наблюдения могут превышать азимут предельного направления 12, показанный на фиг. 3. Область таких направлений на фиг. 5 расположена правее вертикальной линии 14 ниже наблюдаемого контура конуса, но выше круга 15 с угловым радиусом, равным углу засветки ε, ограничивающего зону засветки.
В рассматриваемом расчетном случае расстояния от Земли 3 и от точки нахождения КА 1 до Солнца 5 составляют 1 а.е., а расстояние от точки нахождения КА 1 до Земли 3 принято равным 1/3 а.е. (фиг. 3). Тогда положение точки нахождения КА 1 относительно линии Земля - Солнце в плоскости эклиптики характеризуется расстоянием М между точками 3 и 11 и расстоянием N между точками 1 и 11. Эти величины составляют М=0,05556 а.е. и N=0,32867 а.е. По ним легко подсчитать азимутальный угол направления на вершину конуса α1=-9,594 градуса. Азимутальный угол направления 12, соответствующий углу ε, равному 30 градусам, засветки Солнцем аппаратуры наблюдения КА 1 в показанной на фиг. 3 плоскости эклиптики составляет α11=40,812 градусов. На фиг. 3 пунктиром показана окружность 16 с радиусом 10, равным 0,5 а.е., касательные к которой, проведенные из любой точки на орбите Земли, в том числе из точки нахождения КА 1 и точки 3, соответствуют углу ε, равному 30 градусам, то есть области засветки аппаратуры наблюдения Солнцем. В трехмерном пространстве область засветки представляет для этих точек сферу того же радиуса.
Как видно из фиг. 3, в секторе азимутальных углов между направлением на точку 3 (α3=-9,594 градуса) и направлением 12 (α12=40,812 градусов) имеют место эллиптические сечения конуса. Пример такого сечения показан на фиг. 4. На ней изображен эллипс 13 в том же масштабе, который использован на фиг. 3. Касательная к этому эллипсу, проведенная из точки нахождения КА 1, характеризует угол места β точки наблюдаемого контура конуса, соответствующей данному азимуту α.
Функциональная зависимость угла места β от азимутального угла α для наблюдаемых из точки нахождения КА 1 точек контура конуса недоступности, для данного расчетного случая показана на фиг. 5. Эта зависимость имеет нелинейный характер. На фиг. 5 вертикальными линиями 17, 14 показаны условные азимутальные границы, в пределах между которыми может подсчитываться площадь участка небесной сферы, подлежащая регулярному контролю из точки нахождения КА 1. От выбранного положения этих азимутальных границ зависят угловая площадь контроля в квадратных градусах, время обзора выбранной части конуса и время предупреждения о возможном столкновении с обнаруженным небесным телом, а также максимальная дальность наблюдения небесных тел, находящихся в трехмерном пространстве внутри выбранной части конуса.
При выбранном интервале азимутов наблюдения из точки нахождения КА 1 от α=0 градусов (линия 17 на фиг. 5) до α=40 градусов (линия 14 на фиг. 5) площадь, подлежащая контролю, составляет в северной полусфере (600-800) квадратных градусов, а общая площадь в обеих полусферах (1200-1600) квадратных градусов. При размерах поля зрения телескопа (3×3) градусов для покрытия этой площади покадровой съемкой требуется (130-180) кадров. Если обзор площади внутри конуса осуществляется сканированием по полосам шириной 3 градуса при поле зрения (3×3) градусов, то для накрытия этой площади с учетом неизбежного перекрытия сканов необходимо 20 сканов с общей длиной (400-500) градусов.
Точность определения параметров движения обнаруженного небесного тела будет тем выше, чем больше наблюдаемая дуга его перемещения по небесной сфере, что требует достаточно большого интервала между моментами времени его наблюдений. С другой стороны, из-за большого ожидаемого количества наблюдаемых небесных тел Солнечной системы при большом интервале времени между их наблюдениями невозможна идентификация одних и тех же тел.
Как указано в [7, стр. 169], при выполнении требования массовости обслуживания для каталогизации небесных тел необходимо получать изображения всего неба не менее 3 раз в месяц, причем один и тот же участок неба должен осматриваться не менее 4 раз за ночь. Следовательно, интервал времени между наблюдениями одного и того же участка неба, то есть наблюдаемого небесного тела, может составлять около трех часов.
Предложенный способ обзора имеет важное преимущество перед прототипом [6]. Барьерный способ обнаружения любого потенциально опасного небесного тела для выявления степени его опасности предполагает прекращение создание барьера и сосредоточение наблюдения обоих КА на этом небесном теле вплоть до выявления отсутствия опасности столкновения его с Землей. При этом ввиду ожидаемой многочисленности малых потенциально опасных тел Солнечной системы барьерный режим работы прототипа будет постоянно нарушаться.
В предлагаемом способе обзора имеет место регулярный с интервалом в несколько часов просмотр всей конической области космического пространства между Солнцем и Землей или ее ограниченной части, недоступной для наблюдения с Земли и с околоземных орбит, при котором без изменения режима его работы возможно уточнение параметров орбит всех вновь обнаруживаемых небесных тел и выявление наличия или отсутствия опасности столкновения.
Наблюдение области космического пространства, имеющей форму конуса с вершиной на Земле, осью, направленной на Солнце, и углом при вершине в диапазоне от 40 градусов до 60 градусов, с космического аппарата, размещенного на орбите Земли на постоянном расстоянии от Земли, которую невозможно контролировать с Земли и с околоземных орбит, обеспечит минимизацию времени обзора области космического пространства, недоступной для наблюдения с Земли и с околоземных орбит.
Полученную в результате обзора информацию регистрируют и передают на наземные средства приема информации для последующей обработки.
Предложенные технические решения имеют преимущество перед известными способами обнаружения астероидов и комет, приближающихся к Земле со стороны Солнца, по совокупности параметров: дальности наблюдения, полноте обзора неконтролируемой с околоземных орбит области между Солнцем и Землей и времени обзора этой области.
Источники информации
1. Чубей М.С., Куприянов В.В., Львов В.Н., Цекмейстер С.Д., Бахолдин А.В., Цуканова Г.И., Маркелов С.В., Левко Г.В. Средства, возможности и методы решения задач астероидной и кометной опасности в проекте «Орбитальная звездная стереоскопическая обсерватория». Экологический вестник научных центров Черноморского экономического сотрудничества. №4. Т. 2. 2013. С. 154-160.
2. Данхэм Д.У. и др. Метод предупреждения столкновения малых астероидов с Землей. Астрономический вестник. №4. Т. 47. 2013. С. 341-351.
3. Емельянов В.А., Меркушев Ю.К., Успенский Г.Р., Чернова Н.А. Предупреждение о падении опасных небесных тел на Землю с использованием космической системы, состоящей из двух космических телескопов. Космонавтика и ракетостроение. №4 (33). 2003. С. 85-98.
4. Емельянов В.А., Меркушев Ю.К. Точность определения орбит малых ОНТ с помощью двух космических телескопов, размещаемых на орбите Земли. Сборник трудов конференции «Околоземная астрономия - 2005». Казань. 2006. С. 102-108.
5. Емельянов В.А., Меркушев Ю.К., Лукьященко В.И., Успенский Г.Р. Результаты имитационного моделирования захвата опасных небесных тел полями зрения космических телескопов. Сборник трудов конференции «Околоземная астрономия - 2005». Казань. 2006. С. 109-116.
6. Емельянов В.А. Перспективы использования космических телескопов для обнаружения малых опасных небесных тел и определения параметров их движения. Космонавтика и ракетостроение. №2 (51). 2008. С. 117-122.
7. Астероидно-кометная опасность: вчера, сегодня, завтра / под ред. Б.М. Шустова, Л.В. Рыхловой. М.: Физматлит.2010. С. 169.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космическая система обзора небесной сферы для наблюдения небесных объектов и обнаружения опасных для Земли небесных тел - астероидов и комет | 2015 |
|
RU2610066C1 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| Способ обнаружения опасных небесных тел, приближающихся к Земле с дневного неба, и космическая система для его реализации СОДА-2 | 2017 |
|
RU2675205C1 |
| Способ построения космической системы обзора небесной сферы для обнаружения небесных тел, приближающихся со стороны Солнца и угрожающих столкновением с Землей | 2017 |
|
RU2660090C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ МОНИТОРИНГА АСТЕРОИДНО-КОМЕТНОЙ ОПАСНОСТИ | 2014 |
|
RU2573509C1 |
| СПОСОБ ФОРМИРОВАНИЯ ГРУППИРОВКИ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ ДЛЯ МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ УГРОЗ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ В РЕЖИМЕ, БЛИЗКОМ К РЕАЛЬНОМУ ВРЕМЕНИ | 2018 |
|
RU2711554C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА АСТРОНОМИЧЕСКИХ ОБЪЕКТОВ НАБЛЮДЕНИЯ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2488077C1 |
Изобретение относится к космической технике и может быть использовано при создании космических средств и систем обзора космического пространства для обнаружения астероидов и комет, опасных для Земли. Технический результат - расширение функциональных возможностей. Изобретение включает способ обзора космического пространства между Солнцем и Землей, из-за засветки Солнцем недоступного для наблюдения с Земли или околоземных орбит. Обзор этой части космического пространства производится с одного или двух космических аппаратов, расположенных на орбите Земли на постоянном расстоянии от нее. Обзор космического пространства производится в пределах наблюдаемого с космического аппарата контура конуса с вершиной в центре Земли и осью, направленной на Солнце, ограниченного со стороны Солнца углом засветки Солнцем аппаратуры наблюдения космического аппарата. Полный или частичный обзор данной области космического пространства может осуществляться либо в режиме покадровой съемки с заданной экспозицией, либо в режиме сканирования по полосам с заданной угловой скоростью с использованием матричных фотоприемных приборов с зарядовой связью со считыванием сигналов в режиме с временной задержкой и накоплением. Получаемая информация передается на наземные средства приема информации для ее последующей обработки. 12 з.п.ф-лы, 5 ил.
1. Способ обзора космического пространства между Солнцем и Землей, недоступного для наблюдения оптическими средствами, находящимися на Земле и на околоземных орбитах, из-за их засветки Солнцем, для обнаружения небесных объектов с космического аппарата, размещенного на орбите Земли на постоянном расстоянии от Земли, отличающийся тем, что область наблюдения космического пространства задают в форме конуса с вершиной на Земле и осью, направленной на Солнце, при этом угол при вершине конуса находится в диапазоне от 40 градусов до 60 градусов, в пределах которого невозможно наблюдение данной области космического пространства между Солнцем и Землей оптическими средствами с Земли и с околоземных орбит, причем доступное пространство внутри контура конуса, в пределах которого возможно обнаружение небесных объектов с космического аппарата, ограничивают со стороны Солнца углом засветки Солнцем аппаратуры наблюдения космического аппарата, производят последовательный обзор полем зрения аппаратуры наблюдения космического аппарата всего доступного пространства внутри контура конуса, при этом задают в зависимости от фона наблюдаемой части небесной сферы время экспозиции для различных положений поля зрения аппаратуры наблюдения космического аппарата внутри контура конуса, регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
2. Способ обзора космического пространства по п. 1, отличающийся тем, что после завершения цикла обзора доступного пространства внутри контура конуса продолжают повторные циклы обзора данного пространства, регистрируют полученную информацию и передают ее на наземные средства приема информации для ее последующей обработки, по результатам которой определяют параметры движения обнаруженных небесных тел, в том числе приближающихся к Земле со стороны Солнца.
3. Способ обзора космического пространства по п. 1, отличающийся тем, что на гелиоцентрической орбите располагают два космических аппарата - один впереди Земли, второй позади нее, при этом каждый космический аппарат осматривает все доступное пространство внутри контура конуса, заданного для наблюдения данному космическому аппарату.
4. Способ обзора космического пространства по п. 2, отличающийся тем, что на гелиоцентрической орбите располагают два космических аппарата - один впереди Земли, второй позади нее, при этом каждый космический аппарат осматривает все доступное пространство внутри контура конуса, заданного для наблюдения данному космическому аппарату.
5. Способ обзора космического пространства по п. 1, отличающийся тем, что обзор всего доступного пространства внутри контура конуса производят в режиме покадровой съемки с заданным временем экспозиции отдельных кадров, которые покрывают все доступное пространство внутри контура конуса, регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
6. Способ обзора космического пространства по п. 2, отличающийся тем, что обзор всего доступного пространства внутри контура конуса производят в режиме покадровой съемки с заданным временем экспозиции отдельных кадров, которые покрывают все доступное пространство внутри контура конуса, регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
7. Способ обзора космического пространства по п. 3, отличающийся тем, что обзор всего доступного пространства внутри контура конуса производят в режиме покадровой съемки с заданным временем экспозиции отдельных кадров, которые покрывают все доступное пространство внутри контура конуса, регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
8. Способ обзора космического пространства по п. 4, отличающийся тем, что обзор всего доступного пространства внутри контура конуса производят в режиме покадровой съемки с заданным временем экспозиции отдельных кадров, которые покрывают все доступное пространство внутри контура конуса, регистрируют полученную информацию и передают ее на наземные средства приема информации для последующей обработки.
9. Способ обзора космического пространства по п. 1, отличающийся тем, что последовательный обзор всего доступного пространства внутри контура конуса производят в режиме сканирования по полосам с заданной угловой скоростью с использованием матричных приборов с зарядовой связью со считыванием сигналов в режиме с временной задержкой и накоплением, причем задают угловую скорость и направление сканирования и полностью покрывают все доступное пространство полосами сканирования с шириной, определенной размером поля зрения аппаратуры наблюдения космического аппарата, и длиной, ограниченной размером конуса в направлении сканирования, регистрируют полученную при этом информацию и передают ее на наземные средства приема информации для последующей обработки.
10. Способ обзора космического пространства по п. 2, отличающийся тем, что последовательный обзор всего доступного пространства внутри контура конуса производят в режиме сканирования по полосам с заданной угловой скоростью с использованием матричных приборов с зарядовой связью со считыванием сигналов в режиме с временной задержкой и накоплением, причем задают угловую скорость и направление сканирования и полностью покрывают все доступное пространство полосами сканирования с шириной, определенной размером поля зрения аппаратуры наблюдения космического аппарата, и длиной, ограниченной размером конуса в направлении сканирования, регистрируют полученную при этом информацию и передают ее на наземные средства приема информации для последующей обработки.
11. Способ обзора космического пространства по п. 3, отличающийся тем, что последовательный обзор всего доступного пространства внутри контура конуса производят в режиме сканирования по полосам с заданной угловой скоростью с использованием матричных приборов с зарядовой связью со считыванием сигналов в режиме с временной задержкой и накоплением, причем задают угловую скорость и направление сканирования и полностью покрывают все доступное пространство полосами сканирования с шириной, определенной размером поля зрения аппаратуры наблюдения космического аппарата, и длиной, ограниченной размером конуса в направлении сканирования, регистрируют полученную при этом информацию и передают ее на наземные средства приема информации для последующей обработки.
12. Способ обзора космического пространства по п. 4, отличающийся тем, что последовательный обзор всего доступного пространства внутри контура конуса производят в режиме сканирования по полосам с заданной угловой скоростью с использованием матричных приборов с зарядовой связью со считыванием сигналов в режиме с временной задержкой и накоплением, причем задают угловую скорость и направление сканирования и полностью покрывают все доступное пространство полосами сканирования с шириной, определенной размером поля зрения аппаратуры наблюдения космического аппарата, и длиной, ограниченной размером конуса в направлении сканирования, регистрируют полученную при этом информацию и передают ее на наземные средства приема информации для последующей обработки.
13. Способ обзора космического пространства по любому из пп. 1 - 12, отличающийся тем, что выделяют ограниченную область в доступном пространстве внутри контура конуса и производят наблюдение в пределах этой области.
| Емельянов В.А | |||
| Перспективы использования космических телескопов для обнаружения малых опасных небесных тел и определения параметров их движения | |||
| Космонавтика и ракетостроение | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| С | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
| Емельянов В.А., Меркушев Ю.К., Лукьященко В.И., Успенский Г.Р | |||
| Результаты имитационного моделирования захвата опасных небесных тел полями зрения | |||

