Область техники, к которой относится изобретение
Настоящее изобретение относится к способу синхронизации тактовых генераторов (часов) сетевых устройств.
Уровень техники
Для осуществления низколатентной передачи времязависимых данных, в частности, в недетерминированной сети, например в беспроводной сети, требуется поддерживать синхронизацию тактовых генераторов (генераторов тактовых импульсов) передатчика и приемника. В частности, необходима синхронизация генераторов тактовых импульсов данных, используемых для передачи этих данных.
Существуют различные протоколы для обеспечения синхронизации тактовых генераторов, примерами которых являются протокол сетевого времени NTPv3, протокол установки точного времени IEEE 1588 и его производные 802.1 AS (хронирование и синхронизация для чувствительных ко времени приложений в мостовых локальных вычислительных сетях) и 802.11v (беспроводные локальные вычислительные сети). Технические решения для синхронизации генераторов тактовых импульсов данных в проводной сети основаны на получении тактовых импульсов данных с помощью синхронизируемого тактового генератора системы.
Особую важность для синхронизации двух тактовых генераторов имеют два значения, или параметра: сдвиг и дрейф. Сдвиг представляет собой текущее различие между двумя тактовыми генераторами. Дрейф представляет собой увеличение этого сдвига с течением времени. Сдвиг обычно также учитывает время задержки (называемое также временем задержки передачи или переноса). Это время задержки представляет собой время, требуемое для передачи данных между передатчиком и приемником. Для синхронизированных тактовых генераторов сдвиг и дрейф должны быть равны нулю. В частности, для синхронизации тактовых генераторов ведомого и ведущего устройств сдвиг и дрейф ведомого тактового генератора регулируют, сводя их к нулю.
В известных технических решениях для проводных сетей дрейф используется с целью компенсации сдвига и образования контура управления. Время конвергенции этого контура управления зависит от абсолютной величины сдвига, включая время задержки. Как правило, требуется определенное время для достижения состояния стабилизации, а именно время для дрейфа вплоть до сведения к нулю сдвига тактового генератора ведомой системы. В случае большого сдвига первоначальный дрейф занимает длительное время. Поэтому и процесс синхронизации двух тактовых генераторов может протекать в течение длительного времени.
Одним из часто используемых технических решений является аппаратное регулирование системного тактового генератора ведомого устройства. Это, однако, может влиять на стабильность формирования тактовых импульсов, получаемых с помощью этого системного тактового генератора. Кроме того, использование системного тактового генератора может иметь нежелательные последствия, заключающиеся, например, в том, что все импульсы таких тактовых генераторов (называемых также периферийными) будут иметь "переменную" частоту вместо того, чтобы получить тактовый генератор, требующий лишь синхронизации.
Далее, эти известные технические решения были разработаны для проводных сетей, так что они являются, как правило, несовместимыми с недетерминированными сетями. В недетерминированных сетях с помощью одного из методов доступа к каналу обеспечивается соединение отдельных терминалов с одним и тем же каналом многоточечной связи для осуществления передачи по этому каналу и совместного использования его емкости. Один и тот же канал передачи используется несколькими сетевыми устройствами. К недетерминированным сетям относятся, в частности, беспроводные сети, сети шинной топологии, сети кольцевой топологии, сети звездообразной топологии и полудуплексные линии связи двухточечной топологии.
При таком множестве сетевых устройств, совместно использующих каналы передачи недетерминированных сетей, не представляется возможным определить, доступен ли данный канал передачи для некоторого сетевого устройства. Более того, представляется трудным или даже невозможным предварительно оценить, способно ли некоторое сетевое устройство передавать данные в конкретной недетерминированной сети, вносящей фактор переменной (недетерминированной) задержки в передачу данных.
Недетерминированность, присущая подобным сетям, требует способа синхронизации тактовых генераторов сетевых устройств, отличающегося от аналогичного способа для более детерминированных сетей. Поэтому цель настоящего изобретения заключается в создании способа синхронизации тактовых генераторов сетевых устройств в недетерминированной сети, выполняемой за короткое время и не сопровождающейся возникновением проблем со стабильностью у этих сетевых устройств.
Раскрытие изобретения
В настоящем изобретении предлагается способ синхронизации тактовых генераторов сетевых устройств, предпочтительно в недетерминированной сети, в соответствии с отличительными признаками, указанными в независимом пункте 1 формулы изобретения.
Согласно изобретению в недетерминированной сети, содержащей несколько сетевых устройств, выполняется синхронизация по меньшей мере тактового генератора первого сетевого устройства и тактового генератора второго устройства.
Недетерминированные сети представляют собой, главным образом, сети с множественным доступом к каналу связи, то есть сети, в которых невозможно определить время, требуемое сетевому устройству для получения доступа к такой сети. В этом случае преимущественно отсутствует возможность определения, доступна ли данная недетерминированная сеть для сетевого устройства. Более того, невозможно достоверно установить, возможна ли передача данных сетевым устройством в конкретной недетерминированной сети (с переменной, непрогнозируемой задержкой).
Каждое сетевое устройство содержит по меньшей мере один тактовый генератор, в частности по меньшей мере два тактовых генератора. В частности, один тактовый генератор сетевого устройства представляет собой тактовый генератор центрального процессора, то есть ведущий (главный) генератор тактовых импульсов соответствующего сетевого устройства. В частности, другой тактовый генератор сетевого устройства представляет собой генератор тактовых импульсов данных, в частности генератор тактовых импульсов времязависимых данных. Этот генератор тактовых импульсов данных используется для передачи данных.
В частности, одно из сетевых устройств является ведущим. Это ведущее устройство содержит задаваемый временной базис, с которым должно быть синхронизировано другое сетевое устройство (рассматриваемое как ведомое, или подчиненное). Для передачи данных в недетерминированной сети генераторы тактовых импульсов данных ведомых устройств должны быть синхронизированы с тактовым генератором ведущего устройства.
В частности, первое сетевое устройство рассматривается как ведущее, а второе сетевое устройство - как ведомое. Первый тактовый генератор первого сетевого устройства рассматривается как ведущий тактовый генератор. Второй тактовый генератор второго сетевого устройства рассматривается как ведомый тактовый генератор. Ведомый тактовый генератор регулируется с целью согласования этого второго тактового генератора ведомого устройства с ведущим тактовым генератором ведущего устройства. Ведущий тактовый генератор ведущего устройства может представлять собой генератор тактовых импульсов данных, ведущий генератор тактовых импульсов времязависимых данных и/или тактовый генератор центрального процессора.
Преимущества изобретения
Сущность настоящего изобретения определяется тремя разными аспектами. Первый аспект изобретения состоит в том, что сеть является недетерминированной. В частности, первый аспект включает синхронизацию ведомого тактового генератора ведомого устройства с ведущим тактовым генератором этой недетерминированной сети, вносящей фактор переменной (недетерминированной) задержки в передачу данных.
Второй аспект изобретения состоит в том, что этот ведомый тактовый генератор изолирован (развязан) от любого другого тактового генератора в этой недетерминированной сети. Согласно этому аспекту изобретения все тактовые генераторы всех сетевых устройств изолированы друг от друга, т.е. развязаны. В частности, каждый тактовый генератор отдельного сетевого устройства изолирован от всех остальных тактовых генераторов этого сетевого устройства, а также относительно любого другого генератора любого другого сетевого устройства.
Ведомый тактовый генератор ведомого устройства (то есть второй тактовый генератор второго сетевого устройства) синхронизируется с ведущим тактовым генератором ведущего устройства (то есть с первым тактовым генератором первого сетевого устройства). Следовательно, согласование этого ведомого тактового генератора происходит независимо и отдельно от любого другого тактового генератора второго сетевого устройства и отдельно от любого другого тактового генератора любого другого сетевого устройства. Тем самым ведомый тактовый генератор изолируется от любого другого тактового генератора сетевого устройства.
Согласно изобретению этот ведомый тактовый генератор изолирован соответственно от системного или локального тактового генератора ведомого устройства, в частности относительно тактового генератора центрального процессора ведомого устройства. Следовательно, в способе, предлагаемом в изобретении, локальный/системный тактовый генератор ведомого устройства не регулируется и не нуждается в согласовании с целью синхронизации ведомого и ведущего тактовых генераторов. Этим обеспечивается большая стабильность системы ведомого устройства и других тактовых генераторов, полученных на основе локального/системного тактового генератора. Такая развязка тактовых генераторов предоставляет множество преимуществ и возможностей. Так, можно выполнить плавную регулировку генератора тактовых импульсов данных. Можно также получить несколько тактовых импульсов данных разной частоты.
Третий аспект изобретения состоит в том, что синхронизация тактовых генераторов достигается в стабильном состоянии. В частности, для синхронизации ведомого и ведущего тактовых генераторов определяется и компенсируется дрейф между этими генераторами. После компенсации этого дрейфа достигается упомянутое стабильное состояние ведомого и ведущего тактовых генераторов.
Компенсация дрейфа достигается путем соответствующего регулирования ведомого тактового генератора. В частности, эта компенсация выполняется путем однократного обновления ведомого тактового генератора. В результате такого обновления ведомый тактовый генератор переводится в стабильное состояние. Для выполнения такого обновления необходимо знать зависимость между управляющим сигналом и отклонением тактового генератора. В частности, этот управляющий сигнал представляет собой сигнал, посредством которого регулируется ведомый тактовый генератор, в частности по отклонению. После этого обновления ведущий и ведомый тактовые генераторы находятся в стабильном состоянии и, следовательно, дрейф между ними отсутствует.
Таким образом, в настоящем изобретении не предусмотрено использование непрерывной компенсации дрейфа или контура управления для согласования двух тактовых генераторов вплоть до их окончательной конвергенции и синхронизации. В изобретении предпочтительно использован пошаговый способ. Согласно изобретению предусмотрено непосредственное определение дрейфа и выполнение компенсации конкретного значения последнего. Благодаря этому синхронизацию тактовых генераторов можно осуществить за короткое время.
Синхронизация, в частности, достигается путем обмена соответствующими данными, в частности соответствующими сообщениями и/или запросами. Обмен данными происходит, главным образом, в виде обмена пакетами данных, то есть соответствующими пакетами синхронизации.
В частности, время суток используется в качестве абсолютного времени ведущего тактового генератора. Время суток включает в себя информацию о годе, месяце, дне, часе, минутах, секундах и наносекундах. Используя время суток, можно также передавать между различными недетерминированными сетями времязависимые данные.
В предпочтительном варианте осуществления изобретения выполняется компенсация сдвига между ведущим и ведомым тактовыми генераторами. После определения и компенсации дрейфа ведущий и ведомый тактовые генераторы находятся в стабильном состоянии. Тем не менее между двумя этими тактовыми генераторами обычно присутствует (начальный) сдвиг. В частности, выполняются определение и компенсация этого сдвига. В частности, выполняется также компенсация времени задержки (передачи). В частности, не требуется специально регулировать время задержки, которое компенсируется автоматически вместе со сдвигом.
Смещение и задержка компенсируются путем регулирования ведомого тактового генератора с помощью процесса обновления. В этом процессе обновления учитывается продолжительность периода генератора тактовых импульсов данных. Производится пропуск одного или более периодов генератора тактовых импульсов данных. Тем самым поддерживается стабильное состояние без дрейфа между ведущим и ведомым тактовыми генераторами.
В этом случае сдвиг, в частности сдвиг с компенсацией задержки, имеет место в пределах одного периода ведущего тактового генератора. При дрейфе, равном нулю, тактовые импульсы теперь находятся в привязке, и ведущий и ведомый тактовые генераторы синхронизируются друг с другом. Для поддержания этого синхронизма с течением времени можно выполнить адаптивную компенсацию.
Синхронизация тактовых генераторов предпочтительно выполняется пошаговым способом. На первом шаге (шаге выполнения анализа) этого способа определяют дрейф двух тактовых генераторов. На втором шаге (шаге компенсации дрейфа) выполняется компенсация дрейфа. В частности, компенсация дрейфа осуществляется путем однократного обновления ведомого тактового генератора, как описано выше. После компенсации дрейфа на этом шаге ведущий и ведомый тактовые генераторы находятся в стабильном состоянии и, следовательно, дрейф между этими двумя тактовыми генераторами отсутствует. На третьем шаге (шаге коррекции сдвига) определяют и компенсируют сдвиг. В частности, на этом шаге коррекции сдвига также выполняется компенсация времени задержки (передачи). Тактовые импульсы теперь находятся в привязке, и ведущий и ведомый тактовые генераторы синхронизируются друг с другом. Для поддержания этого синхронизма с течением времени можно выполнить адаптивную компенсацию на четвертом шаге (шаге адаптивной компенсации).
Как упоминалось выше, в изобретении предусмотрено предпочтительное использование не адаптивного способа, включающего изначальное достижение синхронизма, непрерывную компенсацию дрейфа или непрерывное управление для согласования двух тактовых генераторов вплоть до их окончательной конвергенции и синхронизации, а описанного пошагового способа. В соответствии с таким детерминистским подходом предусмотрено непосредственное определение дрейфа и сдвига и выполнение компенсации их конкретных значений. Благодаря этому синхронизацию тактовых генераторов можно осуществить за короткое время.
Величина изменения, вносимого в тактовый сигнал ведомого тактового генератора, является целым кратным этого тактового сигнала. Благодаря этому положение фронта тактового сигнала не изменяется, а изменяется лишь значение счета (время). Максимальное необходимое время коррекции с использованием дрейфа составляет половину периода тактового сигнала ведомого тактового генератора.
Если, например, период тактового сигнала ведомого тактового генератора составляет 1с, а сдвиг равен 5,5с, то пропускаются пять периодов. Это означает, что применено пятикратное изменение периода тактового сигнала ведомого тактового генератора (упомянутое выше целое кратное этого тактового сигнала). Следовательно, применено изменение, величина которого равна пятикратно увеличенному значению 1с, то есть 5с. Поэтому корректируемый сдвиг равен лишь половине секунды (5,5с - 5с), что составляет половину периода тактового сигнала ведомого тактового генератора.
Ведомый тактовый генератор (то есть второй тактовый генератор второго сетевого устройства) предпочтительно представляет собой генератор тактовых импульсов данных, в частности генератор тактовых импульсов времязависимых данных. Ведомое устройство использует этот генератор тактовых импульсов данных для передачи данных в недетерминированной сети. Кроме того, ведущий тактовый генератор выполнен в виде ведущего генератора тактовых импульсов времязависимых данных. Согласно изобретению путем развязки всех этих тактовых генераторов относительно друг друга можно изолировать генератор тактовых импульсов данных ведомого устройства от любого другого тактового генератора этого ведомого устройства.
Согласно изобретению ведомый тактовый генератор предпочтительно изолирован от системного/локального тактового генератора ведомого устройства, в частности от тактового генератора центрального процессора ведомого устройства. Тем самым можно изолировать и отрегулировать узел (домен) времязависимых данных ведомого устройства, характеризуемого генератором тактовых импульсов данных, отдельно от локального тактового домена ведомого устройства, характеризуемого системным тактовым генератором, локальным тактовым генератором или тактовым генератором центрального процессора.
Времязависимые данные предпочтительно передаются через недетерминированную сеть. В частности, через недетерминированную сеть передаются данные, критичные по времени. В частности, второе сетевое устройство передает упомянутые времязависимые данные через недетерминированную сеть. Например, времязависимые данные можно передать из второго сетевого устройства в третье сетевое устройство. Третье сетевое устройство синхронизировано с первым сетевым устройством, то есть с ведущим устройством, тем же образом, что и второе сетевое устройство. Таким путем выполняется также синхронизация тактовых генераторов второго и третьего сетевых устройств. Следовательно, ведомый тактовый генератор, синхронизированный с ведущим тактовым генератором, представляет собой, в частности, генератор тактовых импульсов времязависимых данных. Ведущий тактовый генератор или ведущее устройство в целом представляет собой, в частности, ведущее устройство синхронизации времязависимых данных.
Данные, критичные по времени, могут представлять собой данные, передаваемые с малой задержкой (низколатентные данные), и/или времязависимые данные. Времязависимые данные могут также представлять собой данные, получаемые и обрабатываемые в результате событий, например данные измерений или выборки. Такие данные можно передавать, например, между электронными устройствами управления через недетерминированную сеть.
Определение дрейфа между ведомым и ведущим тактовыми генераторами предпочтительно включает следующие шаги: ведущее устройство передает ведомому устройству два синхронизационных сообщения. Первое синхронизационное сообщение ведущее устройство посылает в первый момент времени передачи. Ведомое устройство принимает это первое синхронизационное сообщение в первый момент времени приема. Второе синхронизационное сообщение ведущее устройство посылает во второй момент времени передачи. Ведомое устройство принимает это второе синхронизационное сообщение во второй момент времени приема. Дрейф между ведущим и ведомым тактовыми генераторами определяется с учетом первого и второго моментов времени приема, а также первого и второго моментов времени передачи.
Дрейф предпочтительно определяется как отношение разности между первым и вторым моментами времени приема к разности между первым и вторым моментами времени передачи. В частности, дрейф определяется по формуле:
 .
.
Сдвиг между ведомым и ведущим тактовыми генераторами предпочтительно определяется посредством запроса/ответа по задержке. Ведущее устройство передает третье синхронизационное сообщение в третий момент времени передачи, а ведомое устройство принимает это третье синхронизационное сообщение в третий момент времени приема. Сразу после этого ведомое устройство передает запрос по задержке в четвертый момент времени передачи, а ведущее устройство принимает этот запрос по задержке в четвертый момент времени приема. Сдвиг и время задержки определяются по третьему моменту времени приема, третьему моменту времени передачи, четвертому моменту времени передачи и четвертому моменту времени приема.
Краткое описание чертежей
Настоящее изобретение описывается ниже с помощью примеров и со ссылками на приложенные чертежи, на которых показано:
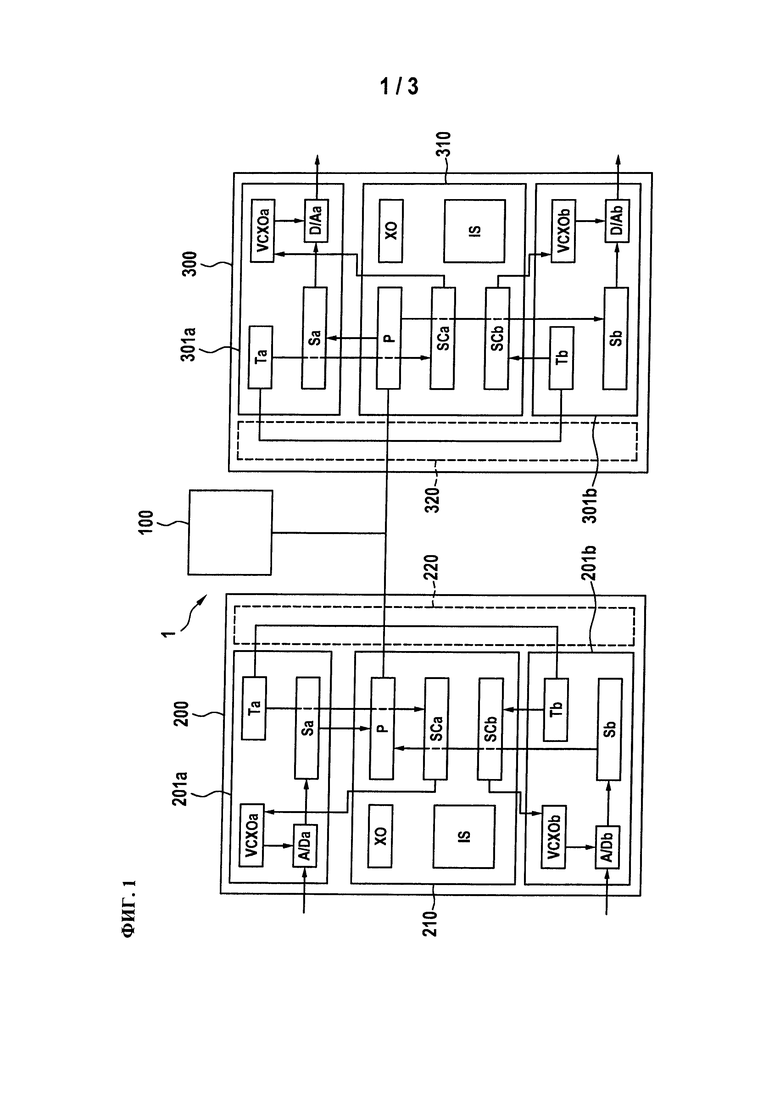
на фиг. 1 - схематическое изображение недетерминированной сети, содержащей первое, второе и третье сетевые устройства и выполненной в соответствии с предпочтительным вариантом осуществления способа, предлагаемого в изобретении,
на фиг. 2 - структурная схема, демонстрирующая предпочтительный вариант осуществления способа, предлагаемого в изобретении.
Осуществление изобретения
На фиг. 1 схематически показана и обозначена номером 1 недетерминированная сеть, выполненная в виде беспроводной сети.
Первое сетевое устройство представляет собой ведущее устройство 100. Ведущее устройство 100 представляет собой ведущий тактовый генератор и выполнено, в частности, в виде ведущего генератора тактовых импульсов, чувствительного ко времени. Все прочие сетевые устройства в беспроводной сети 1 должны синхронизироваться с ведущим тактовым генератором 100. Время, то есть сигнал времени, соответственно выдаваемый ведущим устройством, представляет собой абсолютное время. В частности, это абсолютное время ведущего устройства 100 представляет собой время суток.
В данном конкретном примере беспроводная сеть содержит два других сетевых устройства, а именно второе сетевое устройство 200 и третье сетевое устройство 300. Второе сетевое устройство 200 и третье сетевое устройство 300 выполнены аналогичным образом и содержат одинаковые компоненты. Ниже подробно описываются только второе сетевое устройство 200 и его компоненты. Аналогичное описание применимо к третьему сетевому устройству 300. Ссылочные обозначения для третьего сетевого устройства 300 в нижеследующем описании приведены в скобках.
Каждое из сетевых устройств 200 (300) содержит локальный тактовый домен 210 (310). Локальный тактовый домен 210 (310) представляет собой системный и/или локальный тактовый генератор соответственно сетевого устройства 200 (300). В локальном тактовом домене 210 (310) предусмотрено внутреннее программное обеспечение IS. В частности, внутреннее программное обеспечение IS представляет собой операционную систему сетевого устройства 200 (300). Системный/локальный тактовый генератор ХО снабжен, в частности, резонатором. Этот системный/локальный тактовый генератор ХО представляет собой, в частности, тактовый генератор центрального процессора сетевых устройств 200 (300).
Сетевое устройство 200 (300) также содержит тактовые домены 201а и 201b (301а и 301b) времязависимых данных. Каждый домен 201а и 201b содержит собственно тактовый генератор, называемый генератором тактовых импульсов времязависимых данных. В частности, этот генератор тактовых импульсов времязависимых данных определяется также регулируемым кварцевым резонатором, соответственно VCXOa и VCXOb. Генераторы VCXOa и VCXOb тактовых импульсов времязависимых данных тактовых доменов 201а и 201b (301а и 301b) изолированы от системного тактового генератора ХО локального тактового домена 210 (310).
В частности, все тактовые домены 201а, 201b, 301а и 301b времязависимых данных выполнены аналогичным образом и содержат одинаковые компоненты.
В этом примере обмен времязависимыми данными между вторым сетевым устройством 200 и третьим сетевым устройством 300 происходит через беспроводную сеть 1. Для такого обмена данными необходимо синхронизировать второе сетевое устройство 200 и третье сетевое устройство 300 с первым сетевым устройством 100. Таким образом, сетевые устройства 100, 200 и 300 выполнены с возможностью реализации предпочтительного варианта осуществления способа, предлагаемого в изобретении.
Системные/локальные тактовые генераторы локальных тактовых доменов 210 и 310 не синхронизированы с ведущим тактовым генератором 100. Вместо этого с ведущим тактовым генератором 100 синхронизированы генераторы VCXOa/VCXOb тактовых импульсов времязависимых данных тактовых доменов 201а, 201b, 301а и 301b. Следовательно, системные/локальные тактовые генераторы локальных тактовых доменов 210 и 310 изолированы от регулируемых тактовых генераторов тактовых доменов 201а, 201b, 301а и 301b времязависимых данных.
Используя логическую схему управления, например операционную систему IS, работающую в локальном тактовом домене 210 (310), и элементы, критичные по времени, то есть времязависимые данные, передаваемые в тактовых доменах 201а и 201b (301а и 301b), можно добиться явно выраженных преимуществ и разделения функций. Таким путем можно получить несколько тактовых импульсов времязависимых данных разной частоты в одном сетевом устройстве 200 (300) и обеспечить стабильность локального/системного тактового генератора ХО.
Времязависимые данные могут представлять собой, например, данные, получаемые и обрабатываемые в результате событий, например данные измерений или выборки. Например, времязависимые данные могут включать данные, связанные с измерениями, аудио- и видеоданные, показания датчиков и/или данные позиционирования двигателя.
В конкретном примере, показанном на фиг. 1, второе сетевое устройство 200 и третье сетевое устройство 300 представляют собой электронные устройства управления, связывающиеся друг с другом через недетерминированную сеть 1. В частности, второе сетевое устройство 200 получает сигналы, переданные датчиками. Каждый из тактовых доменов 201а и 201b времязависимых данных содержит аналого-цифровой преобразователь, соответственно A/Da и A/Db. Аналого-цифровые преобразователи A/Da и A/Db преобразовывают в цифровую форму сигналы измерений, полученные от датчиков. Эти цифровые сигналы представляют собой соответственно данные, критичные по времени, или времязависимые данные, обмен которыми с третьим сетевым устройством 300 происходит через беспроводную сеть 1.
В частности, третье сетевое устройство 300 обрабатывает полученные времязависимые данные, посланные вторым сетевым устройством 200. С помощью цифро-аналоговых преобразователей D/Aa и D/Ab тактовые домены 301а и 301b времязависимых данных могут преобразовать цифровые сигналы обратно в аналоговые сигналы. Эти аналоговые сигналы могут поступать на выход третьего сетевого устройства 300 и использоваться для управления другими компонентами.
В приведенном ниже конкретном примере осуществляется обмен времязависимыми данными через беспроводную сеть 1 между тактовыми доменами 201а и 301а. Для этого обмена данными генераторы VCXOa тактовых импульсов времязависимых данных тактовых доменов 201а и 301а должны быть синхронизированы с ведущим тактовым генератором 100 в соответствии с предпочтительным вариантом осуществления способа, предлагаемого в изобретении. Ниже описывается то, как генератор VCXOa тактовых импульсов времязависимых данных тактового домена 201а синхронизируется с ведущим тактовым генератором 100. Данное описание применимо и к синхронизации тактового домена 301а.
В целях простоты, в приведенном ниже описании генератор тактовых импульсов времязависимых данных именуется ведомым тактовым генератором VCXOa, а тактовый домен 201а времязависимых данных - ведомым устройством 201а. Времязависимые данные, подлежащие обмену, именуются просто обмениваемыми данными.
Ведущее устройство 100 передает ведомому устройству соответствующие данные, в частности соответствующие сигналы, сообщения и/или запросы. Обмен этими данными производится предпочтительно в форме пакетов данных. В приведенном ниже описании эти данные и/или пакеты данных именуются синхронизационными данными.
Ведущее устройство 100 передает, или посылает, эти синхронизационные данные в блок Та формирования меток времени ведомого устройства 201а, и наоборот. Согласно изобретению с помощью этих сигналов осуществляется определение дрейфа и сдвига между ведущим тактовым генератором 100 ведомым тактовым генератором VCXOa. Блок Та формирования меток времени устанавливает связь с блоком SCa сервоуправления в локальном тактовом домене 210. Блок SCa сервоуправления осуществляет управление и регулирование применительно к ведомому тактовому генератору VCXOa и компенсацию дрейфа и сдвига.
Ниже подробно описывается со ссылками на фиг. 2 предлагаемый в изобретении способ синхронизации ведомого тактового генератора VCXOa и ведущего тактового генератора 100.
При синхронизации ведомых тактовых генераторов VCXOa тактовых доменов 201а и 301а времязависимых данных с ведущим тактовым генератором 100 может происходить обмен обмениваемыми данными между вторым сетевым устройством 200 и третьим сетевым устройством 300. Ведомый тактовый генератор VCXOa ведомого устройства 201а передает сигнал времени (синхронизированное время) в аналого-цифровой преобразователь A/Da. Аналого-цифровой преобразователь A/Da передает обмениваемые данные с соответствующей меткой времени в блок Sa выборки. Блок Sa выборки передает обмениваемые данные в блок Р формирования пакетов в локальном тактовом домене 210. В блоке Р формирования пакетов обмениваемые данные подготавливаются к передаче. В частности, обмениваемые данные разбиваются на пакеты.
Обмениваемые данные посылаются в третье сетевое устройство 300 через тактовый домен 220 передачи данных. Тактовый домен 220 передачи данных содержит свой собственный тактовый генератор (тактовый генератор передачи данных), который используется для физического преобразования пакетов и/или данных. Кроме обмениваемых данных тактовый домен 220 передачи данных посылает в ведущее устройство 100 и получает оттуда также и синхронизационные данные.
Сетевое устройство 300 получает посланные обмениваемые данные через свой тактовый домен 320 передачи данных. В блоке Р формирования пакетов локального тактового домена 310 обмениваемые данные могут быть распакованы путем интерпретации, то есть синтаксического анализа. Распакованные обмениваемые данные передаются из блока Р формирования пакетов в блок Sa выборки тактового домена 301а времязависимых данных и в цифро-аналоговый преобразователь D/Aa. Ведомый тактовый генератор VCXOa ведомого устройства 301а передает сигнал времени (синхронизированное время) в цифро-аналоговый преобразователь D/Aa.
Приведенное выше описание применимо аналогичным образом к блоку Tb формирования меток времени, блоку SCb сервоуправления, блоку Sb выборки и к управляемому напряжением кварцевому резонатору VCXOb тактовых доменов 201b и 301b времязависимых данных.
Все чувствительные ко времени тактовые генераторы VCXOa, VCXOb имеют связь с ведущим устройством, в частности в отношении его абсолютного времени. Эта связь поддерживается блоками SCa и SCb сервоуправления в локальном тактовом домене 210 (310). Использование времени суток в качестве абсолютного времени ведущего устройства позволяет передавать времязависимые данные между несколькими недетерминированными сетями, в частности между несколькими беспроводными сетями. Каждая из этих недетерминированных сетей, в частности беспроводная сеть, может иметь конфигурацию, схожую с конфигурацией беспроводной сети 1, показанной на фиг. 1. В каждой беспроводной сети предусмотрен свой собственный ведущий тактовый генератор.
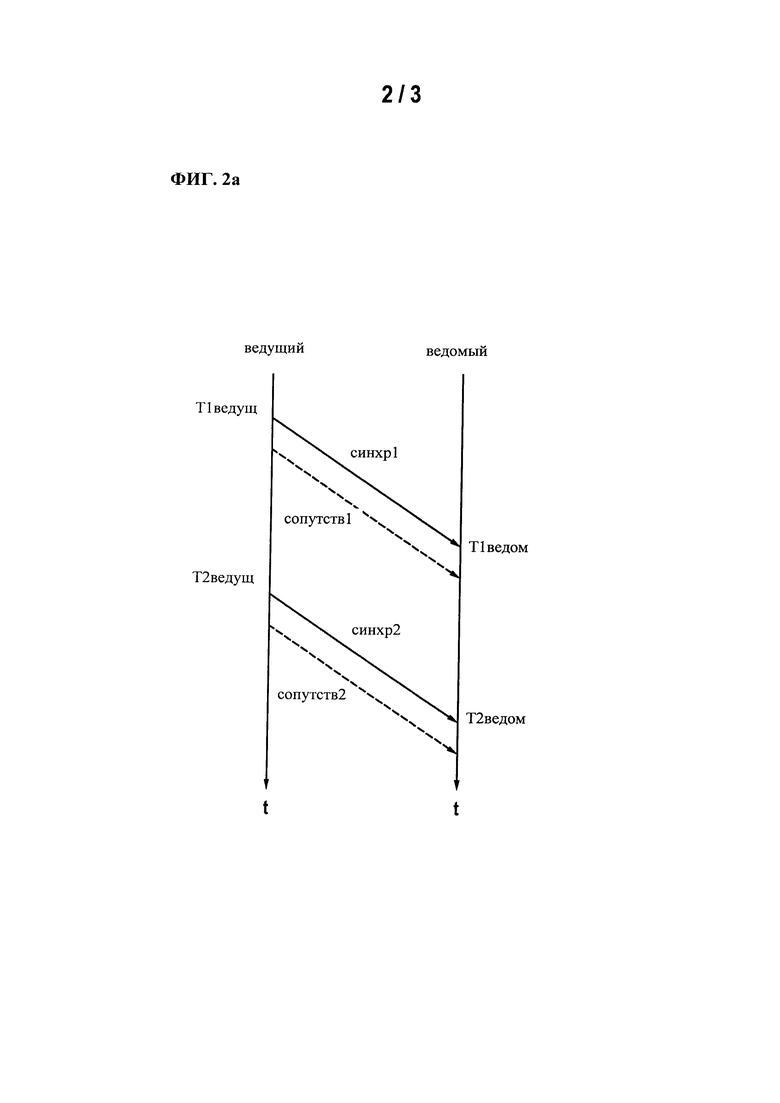
На фиг. 2 показана структурная схема, демонстрирующая предпочтительный вариант осуществления изобретения, в котором синхронизируются ведомый тактовый генератор VCXOa и ведущий тактовый генератор 100. Синхронизация тактовых генераторов VCXOa и 100 выполняется пошаговым способом. Структурная схема на фиг.2 иллюстрирует в целом обмен синхронизационными данными между первым сетевым устройством 100 и вторым сетевым устройством 200 и в частности соответственно между ведущим тактовым генератором 100 и ведомым тактовым доменом 201а времязависимых данных.
Вертикальные оси представляют собой оси времени, отображающие в символической форме, в какой момент времени ведущее и ведомое устройства передают синхронизационные данные друг другу. Левая ось времени относится к ведущему устройству, а правая - к ведомому.
На фиг. 2а представлен первый шаг (шаг выполнения анализа) предпочтительного варианта осуществления способа, предлагаемого в изобретении, на котором определяют дрейф между ведущим и ведомым тактовыми генераторами.
В первый момент Т1ведущ времени передачи ведущее устройство посылает ведомому устройству первое синхронизационное сообщение синхр1 в качестве синхронизационных данных. В первый момент Т1 ведом времени приема ведомое устройство получает это первое синхронизационное сообщение синхр1.
Во второй момент Т2ведущ времени передачи ведущее устройство посылает ведомому устройству второе синхронизационное сообщение синхр2 в качестве синхронизационных данных. Во второй момент Т2ведом времени приема ведомое устройство получает это второе синхронизационное сообщение синхр2.
Дрейф определяется с учетом первого момента Т1 ведом времени приема, второго момента Т2ведом времени приема, первого момента T1ведущ времени передачи и второго момента Т2ведущ времени передачи. Дрейф предпочтительно определяется как отношение разности между моментами времени приема к разности между моментами времени передачи. В частности, дрейф определяется по формуле:
 .
.
На втором шаге (шаге компенсации дрейфа) выполняется компенсация дрейфа в ведомом устройстве. В частности, блок Та формирования меток времени передает определенное значение дрейфа в блок SCa сервоуправления. Блок SCa сервоуправления выполняет соответствующее регулирование управляемого напряжением кварцевого резонатора VXCOa, в результате чего происходит компенсация дрейфа. Ведомое и ведущее устройства находятся в стабильном состоянии.
В процессе передачи синхронизационных сообщений ведущее устройство может также передавать ведомому устройству сопутствующие сообщения. Сопутствующие сообщения содержат информацию с указанием точного времени посылки ведущим устройством синхронизационных сообщений ведомому устройству. Так, первое сопутствующее сообщение сопутств1 содержит точный первый момент Т1ведущ времени передачи. Второе сопутствующее сообщение сопутств2 содержит точный второй момент Т2ведущ времени передачи.
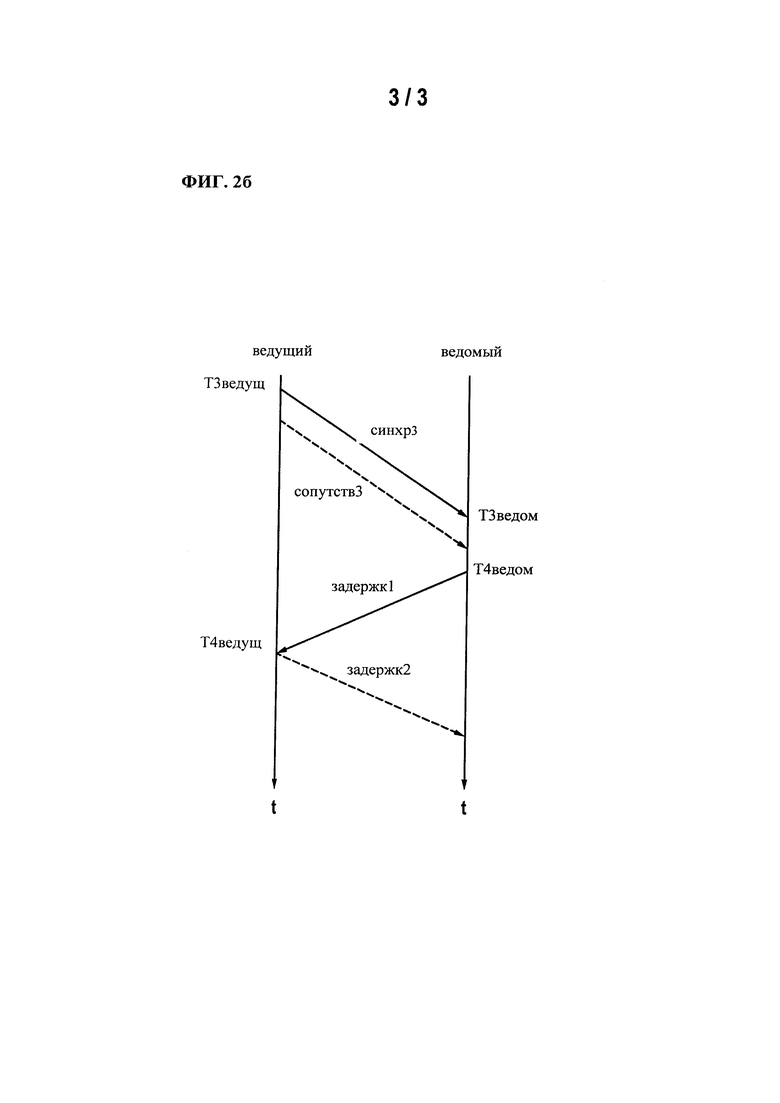
На фиг. 2б представлен третий шаг (шаг коррекции сдвига) предпочтительного варианта осуществления способа, предлагаемого в изобретении, на котором определяется и компенсируется сдвиг между ведущим тактовым генератором 100 и ведомым тактовым генератором VCXOa.
В третий момент Т3ведущ времени передачи ведущее устройство посылает ведомому устройству третье синхронизационное сообщение синхр3 в качестве синхронизационных данных. В третий момент Т3ведом времени приема ведомое устройство получает это третье синхронизационное сообщение синхр3.
Между третьим моментом Т3ведущ времени передачи и третьим моментом Т3ведом времени приема имеет место следующая зависимость:
Т3ведом - Т3ведущ = сдвиг + Тзадержк.
Тзадержк представляет собой время задержки, то есть время, требуемое для передачи данных (в частности, синхронизационных данных) между ведущим и ведомым устройствами.
Точный третий момент Т3ведущ времени передачи может содержаться в переданном третьем сопутствующем сообщении сопутств3.
В четвертый момент Т4ведом времени передачи ведомое устройство посылает ведущему устройству запрос задерж1 по задержке. В четвертый момент Т4ведущ времени приема ведущее устройство получает этот запрос задерж1 по задержке. После получения запроса по задержке в четвертый момент Т4ведущ времени приема ведущее устройство немедленно посылает ведомому устройству ответ задерж2 по задержке в качестве ответа на запрос задерж1.
Между временем задержки и четвертым моментом Т4ведущ времени приема имеет место следующая зависимость:
 ,
,
где:
Т4ведом*=Т4ведом - (сдвиг + Тзадержк).
Эта зависимость согласуется с предположением, что задержка является симметричной, то есть что среднее значение времени передачи данных из ведущего устройства в ведомое устройство равно среднему значению времени передачи данных из ведомого устройства в ведущее устройство и что это среднее значение является постоянной величиной или пренебрежимо мало изменяется с течением времени.
Приведенные выше формулы позволяют определить сдвиг. Сдвиг предпочтительно определяется с учетом третьего момента Т3ведом времени приема, третьего момента Т3ведущ времени передачи, четвертого момента Т4ведом времени передачи и четвертого момента Т4ведущ времени приема. Определение сдвига предпочтительно производится по следующей формуле:
сдвиг = (Т3ведом - Т3ведущ) – Тзадержк,
где:
 .
.
Определив сдвиг (и, следовательно, задержку), можно компенсировать этот сдвиг (и, следовательно, эту задержку) аналогично компенсации дрейфа. С помощью способа, предлагаемого в изобретении, можно очень плавно и быстро скорректировать дрейф, сдвиг и задержку у ведомого тактового генератора.
Если компенсация дрейфа может быть выполнена быстро после второго момента Т2ведом времени приема или если было установлено, что дрейф является минимальным, то отпадает необходимость в передаче третьего синхронизационного сообщения синхр3. В этом случае второй момент Т2ведущ времени передачи и второй момент Т2ведом времени приема используются как входные значения для вычисления задержки и сдвига. При этом в приведенной выше формуле третий момент Т3ведущ времени передачи заменяется вторым моментом Т2ведущ времени передачи, а третий момент Т3ведом времени приема заменяется вторым моментом Т2ведом времени приема:
сдвиг=(Т1ведом - Т2ведущ) – Тзадержк,
где:
 .
.
Таким образом, сдвиг определяется с учетом второго момента Т3ведом времени приема, второго момента Т2ведущ времени передачи, четвертого момента Т4ведом времени передачи и четвертого момента Т4ведущ времени приема.
С помощью способа, предлагаемого в изобретении, ведомое устройство устанавливается на нужный период и происходит синхронизация ведомого и ведущего тактовых генераторов. Для поддержания этого синхронизма с течением времени можно выполнить адаптивную компенсацию на четвертом шаге (шаге адаптивной компенсации). Этот шаг обеспечивает компенсацию остаточного сдвига периода посредством дрейфа. В ходе адаптивной компенсации блок SCa сервоуправления выполняет соответствующее регулирование управляемого напряжением кварцевого резонатора VXCOa.
Благодаря предлагаемым в изобретении разделению и развязке системного/локального тактового генератора VCXO локального тактового домена 210 и регулируемого ведомого тактового генератора VCXOa тактового домена 201а времязависимых данных блок SCa сервоуправления не подвергается воздействию или запуску в моменты приема синхронизационных данных. Синхронизационные данные предоставляют информацию для определения сдвига и дрейфа. Блок SCa сервоуправления функционирует в своем локальном тактовом домене, будучи изолирован от тактового домена 201а времязависимых данных и тактового домена 220 передачи данных. Блок SCa сервоуправления использует информацию по сдвигу и дрейфу. Эта развязка делает блок SCa сервоуправления более независимым от фазового дрожания в сети.
Например, если значение абсолютного времени ведущего тактового генератора равно 35,7 секунды, а времени ведомого тактового генератора - 25 секунд, то значение, определенное для сдвига и времени задержки (сдвиг + Тзадержк), равно -10,7 с.Частота ведомого тактового генератора составляет, например, f=48 Гц, а соответствующий период времени равен:
 .
.
Следовательно, коррекция, требуемая для компенсации этого сдвига (и времени задержки), равна:
 ,
,
то есть необходимо применить коррекцию, составляющую 513608 периодов.
Определенная коррекция, требуемая для компенсации дрейфа, равна:
Ткоррекция_ дрейфа = 4,536 мкс.
С помощью способа, предлагаемого в изобретении, можно добиться синхронизации ведущего и ведомого тактовых генераторов за короткое время - быстрее, чем в случае адаптивного способа, использования непрерывной компенсации дрейфа или контура управления.
Согласно изобретению для привязки ведомого тактового генератора к ведущему тактовому генератору требуются три синхронизационных сообщения, (по меньшей мере) одно сопутствующее сообщение, одна последовательность запросов/ответов по задержке и время дрейфа в пределах последнего периода.
Если синхронизационные сообщения посылаются, например, четыре раза в секунду, то есть каждые 250 мс, то время, требуемое для трех синхронизационных сообщений, составляет 750 мс.
Каждый обмен запросом и ответом по задержке выполняется в течение времени задержки. Следовательно, одна последовательность из запроса и ответа по задержке требует времени, равного удвоенному времени задержки. Типичное время задержки составляет 1 мс.
При дрейфе, составляющем 20 млн-1 (частей на миллион), его время в пределах последнего периода равно:
 .
.
Следовательно, время синхронизации ведомого и ведущего тактовых генераторов составляет 979,8 мс.
Если компенсация дрейфа может быть выполнена быстро после второго момента Т2ведом времени приема или если было установлено, что дрейф является минимальным и, следовательно, нет необходимости в передаче третьего синхронизационного сообщения синхр3, то синхронизация может быть достигнута даже быстрее. В этом случае требуется послать только два синхронизационных сообщения. Поэтому время синхронизации ведомого и ведущего тактовых генераторов сокращается на 250 мс до 729,8 мс.
Изобретение относится к синхронизации (часов) между множеством устройств с тактовой частотой и предназначено для создания синхронизации тактовых генераторов сетевых устройств в недетерминированной сети, выполняемой за короткое время и не сопровождающейся возникновением проблем со стабильностью у этих сетевых устройств. Изобретение раскрывает способ синхронизации тактовых генераторов сетевых устройств (100, 200), предпочтительно в недетерминированной сети (1) с множественным доступом к каналу связи, в которой невозможно определить время, требуемое сетевому устройству для получения доступа к этой недетерминированной сети (1), причем каждое сетевое устройство (100, 200) содержит по меньшей мере один тактовый генератор, первый тактовый генератор первого сетевого устройства (100) и второй тактовый генератор (VCXOa) второго сетевого устройства (200) различаются сдвигом, изменяющимся с течением времени вследствие дрейфа, а второй тактовый генератор (VCXOa) второго сетевого устройства (200) должен синхронизироваться с первым тактовым генератором первого сетевого устройства (100), причем второй тактовый генератор (VCXOa) второго сетевого устройства (200) согласуют отдельно от любого другого тактового генератора второго сетевого устройства (200) и отдельно от любого другого тактового генератора любого другого сетевого устройства и определяют и компенсируют дрейф между тактовым генератором первого сетевого устройства (100) и тактовым генератором (VCXOa) второго сетевого устройства (200). 11 з.п. ф-лы, 3 ил.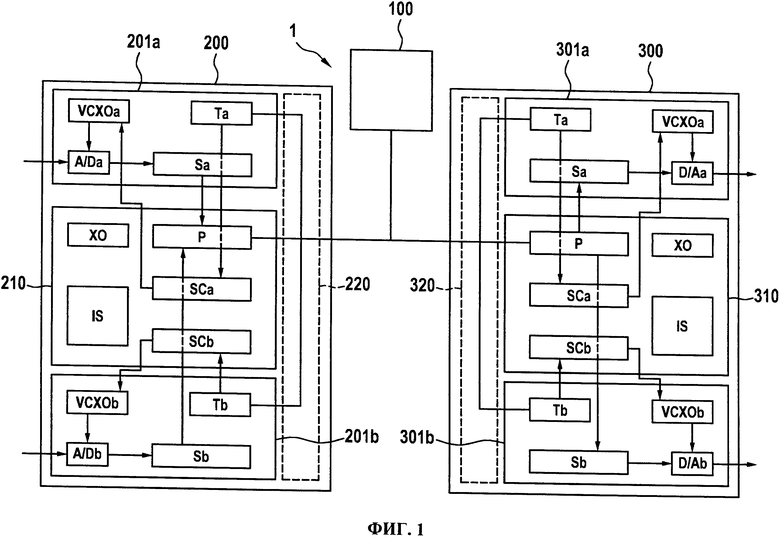
1. Способ синхронизации тактовых генераторов сетевых устройств (100, 200), предпочтительно в недетерминированной сети (1), причем:
- каждое сетевое устройство (100, 200) содержит по меньшей мере один тактовый генератор,
- первый тактовый генератор первого сетевого устройства (100) и второй тактовый генератор (VCXOa) второго сетевого устройства (200) могут различаться сдвигом, который может изменяться с течением времени вследствие дрейфа,
- второй тактовый генератор (VCXOa) второго сетевого устройства (200) должен синхронизироваться с первым тактовым генератором первого сетевого устройства (100),
отличающийся тем, что:
- второй тактовый генератор (VCXOa) второго сетевого устройства (200) согласуют отдельно от любого другого тактового генератора второго сетевого устройства (200) и отдельно от любого другого тактового генератора любого другого сетевого устройства,
- определяют и компенсируют дрейф между первым тактовым генератором первого сетевого устройства (100) и вторым тактовым генератором (VCXOa) второго сетевого устройства (200).
2. Способ по п. 1, в котором определяют и компенсируют сдвиг между первым тактовым генератором первого сетевого устройства (100) и вторым тактовым генератором (VCXOa) второго сетевого устройства (200).
3. Способ по п. 2, в котором:
- на первом шаге определяют дрейф между первым тактовым генератором первого сетевого устройства (100) и вторым тактовым генератором (VCXOa) второго сетевого устройства (200),
- на втором шаге компенсируют определенный дрейф между первым тактовым генератором первого сетевого устройства (100) и вторым тактовым генератором (VCXOa) второго сетевого устройства (200),
- на третьем шаге определяют и компенсируют сдвиг между первым тактовым генератором первого сетевого устройства (100) и вторым тактовым генератором (VCXOa) второго сетевого устройства (200).
4. Способ по п. 3, в котором для компенсации сдвига ко второму тактовому генератору (VCXOa) второго сетевого устройства (200) применяют изменение, представляющее собой целое кратное периода второго тактового генератора (VCXOa) второго сетевого устройства (200).
5. Способ по одному из предыдущих пунктов, в котором второй тактовый генератор (VCXOa) второго сетевого устройства (200) представляет собой генератор тактовых импульсов данных, в частности генератор тактовых импульсов времязависимых данных.
6. Способ по п. 5, в котором второе сетевое устройство (200) содержит генератор (VCXOa) тактовых импульсов данных и системный тактовый генератор (ХО), причем генератор (VCXOa) тактовых импульсов данных регулируется отдельно от системного тактового генератора (ХО) и изолирован от него.
7. Способ по п. 5 или 6, в котором тактовый домен (201а) времязависимых данных второго сетевого устройства (200), характеризующийся генератором (VCXOa) тактовых импульсов данных, изолирован от регулируемого отдельно от него локального тактового домена (210) второго сетевого устройства (200), характеризующегося системным тактовым генератором (ХО).
8. Способ по одному из предыдущих пунктов, в котором второе сетевое устройство (200) передает времязависимые данные через сеть, предпочтительно через недетерминированную сеть.
9. Способ по одному из предыдущих пунктов, в котором недетерминированная сеть представляет собой беспроводную сеть, сеть шинной топологии, сеть кольцевой топологии, сеть звездообразной топологии или полудуплексную линию связи двухточечной топологии.
10. Способ по одному из предыдущих пунктов, в котором определение дрейфа между тактовым генератором первого сетевого устройства (100) и тактовым генератором (VCXOa) второго сетевого устройства (200) включает следующие шаги:
- первое сетевое устройство (100) посылает первое синхронизационное сообщение (синхр1) в первый момент (Т1ведущ) времени передачи, а второе сетевое устройство (200) получает первое синхронизационное сообщение (синхр1) в первый момент (Т1ведом) времени приема,
- первое сетевое устройство (100) посылает второе синхронизационное сообщение (синхр2) во второй момент (Т2ведущ) времени передачи, а второе сетевое устройство (200) получает второе синхронизационное сообщение (синхр2) во второй момент (Т2ведом) времени приема,
- дрейф между первым тактовым генератором первого сетевого устройства (100) и вторым тактовым генератором (VCXOa) второго сетевого устройства (200) определяют с учетом первого момента (Т1ведом) времени приема, второго момента (Т2ведом) времени приема, первого момента (Т1ведущ) времени передачи и второго момента (Т2ведущ) времени передачи.
11. Способ по п. 10, в котором дрейф определяют как отношение разности между первым моментом (Т1ведом) времени приема и вторым моментом (Т2ведом) времени приема к разности между первым моментом (Т1ведущ) времени передачи и вторым моментом (Т2ведущ) времени передачи.
12. Способ по одному из предыдущих пунктов, в котором определение сдвига между тактовым генератором первого сетевого устройства (100) и тактовым генератором (VCXOa) второго сетевого устройства (200) включает следующие шаги:
- первое сетевое устройство (100) посылает третье синхронизационное сообщение (синхр3) в третий момент (Т3ведущ) времени передачи, а второе сетевое устройство (200) получает третье синхронизационное сообщение (синхр3) в третий момент (Т3ведом) времени приема,
- второе сетевое устройство (200) посылает запрос (задержк1) по задержке в четвертый момент (Т4ведом) времени передачи, а первое сетевое устройство (100) получает запрос (задержк1) по задержке в четвертый момент (Т4ведущ) времени приема,
- сдвиг и время задержки определяют с учетом третьего момента (Т3ведом) времени приема, третьего момента (Т3ведущ) времени передачи, четвертого момента (Т4ведом) времени передачи и четвертого момента (Т4ведущ) времени приема.
| US 2010238917 A1, 23.09.2010 | |||
| KR 101176798 B1, 24.08.2012 | |||
| Устройство для измерения частоты вращения | 1984 |
|
SU1239620A1 |
| US 2012159001 A1, 21.06.2012 | |||
| Комбинированный конденсатор для паровых турбин | 1926 |
|
SU6841A1 |

