Область техники, к которой относится изобретение
[1] Раскрытие сущности относится к системе беспроводной связи. Более конкретно, раскрытие сущности относится к оборудованию и способу для синхронизации с использованием сети беспроводной связи в системе беспроводной связи.
Уровень техники
[2] Чтобы удовлетворять требованию по увеличению трафика беспроводных данных с момента развертывания систем связи четвертого поколения (4G), прикладываются усилия для того, чтобы разрабатывать улучшенную систему связи пятого поколения (5G) или пред-5G-систему связи. Следовательно, 5G- или пред-5G-система связи также называется "выходящей за рамки 4G-сети" или "системой после стандарта долгосрочного развития (LTE)".
[3] Считается, что 5G-система связи реализуется в верхних полосах миллиметровых частот (mmWave), к примеру, в полосах частот в 60 ГГц, с тем чтобы добиваться более высоких скоростей передачи данных. Чтобы снижать потери при распространении радиоволн и увеличивать расстояние передачи, формирование диаграммы направленности, массовая технология со многими входами и многими выходами (MIMO), полноразмерная MIMO-технология (FD-MIMO), решетчатая антенна, формирование аналоговой диаграммы направленности, крупномасштабные антенные технологии обсуждаются в 5G-системах связи.
[4] Помимо этого, в 5G-системах связи, проводятся разработки для улучшения системной сети на основе усовершенствованных небольших сот, облачных сетей радиодоступа (RAN), сверхплотных сетей, связи между устройствами (D2D), беспроводного обратного транзитного соединения, перемещаемой сети, совместной связи, координированной многоточечной передачи (CoMP), подавления помех на приемном конце и т.п.
[5] В 5G-системе, разработаны гибридная частотная манипуляция (FSK) и квадратурная амплитудная модуляция (FQAM), и кодирование с наложением окон переменной длительности (SWSC) в качестве усовершенствованной модуляции с кодированием (ACM), а также интерфейс беспроводного доступа на нескольких несущих с гребенками фильтров (FBMC), неортогональный множественный доступ (NOMA) и множественный доступ на основе разреженных кодов (SCMA) в качестве усовершенствованной технологии доступа.
[6] По мере того, как технология мобильной связи совершенствуется, потребность в тактовой синхронизации, которая предоставляется только в проводной сети, также возникает в беспроводной сети. Следовательно, требуется решение для обеспечения таковой синхронизации между терминалами за счет взаимодействия чувствительной ко времени сети (TSN) и поддерживаемой проводной сети (TSN) посредством сети беспроводной связи, т.е. 5G-системы на основе стандарта Партнерского проекта третьего поколения(3GPP) (5GS).
[7] Вышеуказанная информация представляется в качестве исходной информации только для того, чтобы помогать в понимании раскрытия сущности. Не выполняются определения и не выносятся суждения в отношении того, может или нет быть применимым что-либо из вышеуказанного в качестве предшествующего уровня техники относительно раскрытия сущности.
Сущность изобретения
Решение задачи
[8] Аспекты раскрытия сущности заключаются в том, чтобы разрешать, по меньшей мере, вышеуказанные проблемы и/или недостатки и предоставлять, по меньшей мере, преимущества, описанные ниже. Соответственно, аспект раскрытия сущности состоит в том, чтобы предоставлять оборудование и способ для синхронизации с использованием сети беспроводной связи в системе беспроводной связи.
[9] Другой аспект раскрытия сущности состоит в том, чтобы предоставлять оборудование и способ для разрешения проблемы асимметричной задержки на распространение восходящей линии связи (UL) и нисходящей линии связи (DL) линии радиосвязи, чтобы также поддерживать функцию тактовой синхронизации, которая поддерживается только в проводной сети, поддерживающей чувствительную ко времени сеть (TSN), в системе беспроводной связи, поддерживающей систему пятого поколения (5GS).
[10] Дополнительные аспекты вариантов осуществления изложены частично в описании, которое приводится ниже, и частично являются очевидными из описания или могут распознаваться посредством практического использования представленных вариантов осуществления.
[11] В соответствии с аспектом раскрытия сущности, способ работы оборудования в системе беспроводной связи, при этом способ содержит. прием сообщения, включающего в себя, по меньшей мере, один параметр, указывающий бюджет задержек при передаче пакетов (PDB), допуск по потерям и приоритет; и диспетчеризацию пакета на основе сообщения и предварительно сохраненного значения времени задержки.
[12] В соответствии с другим аспектом раскрытия сущности, оборудование в системе беспроводной связи, причем оборудование содержит: приемо-передающее устройство; и, по меньшей мере, один процессор, функционально соединенный с приемо-передающим устройством и выполненный с возможностью: принимать сообщение, включающее в себя, по меньшей мере, один параметр, указывающий бюджет задержек при передаче пакетов (PDB), допуск по потерям и приоритет, и диспетчеризовать пакет на основе сообщения и предварительно сохраненного значения времени задержки.
[13] В соответствии с аспектом раскрытия сущности, предусмотрен способ работы функции пользовательской плоскости (UPF) в системе беспроводной связи. Способ работы включает в себя прием первого параметра для тактовой синхронизации из базовой станции и выполнение тактовой синхронизации с соседней сетевой системой с использованием принимаемого первого параметра и второго параметра, при этом первый параметр может включать в себя информацию, связанную со временем задержки в линии связи между соседней сетевой системой и сетевой системой, содержащей UPF, и временем пребывания терминала, базовой станции и UPF сетевой системы, содержащей UPF, и второй параметр может включать в себя информацию, связанную со временем задержки в транзитном соединении между базовой станцией и UPF.
[14] В соответствии с другим аспектом раскрытия сущности, предусмотрен способ работы терминала в системе беспроводной связи. Способ работы включает в себя прием третьего параметра для тактовой синхронизации из базовой станции и выполнение тактовой синхронизации с соседней сетевой системой с использованием принимаемого третьего параметра и четвертого параметра, при этом третий параметр может включать в себя информацию, связанную со временем задержки в линии связи между соседней сетевой системой и сетевой системой, содержащей UPF, и временем задержки в линии радиосвязи между терминалом и базовой станцией сетевой системы, содержащей UPF, и четвертый параметр предоставляется. Способ работы включает в себя информацию, связанную со временем пребывания терминала.
[15] В соответствии с другим аспектом раскрытия сущности, предусмотрена UPF в системе беспроводной связи. UPF включает в себя приемо-передающее устройство для приема первого параметра для тактовой синхронизации из базовой станции и, по меньшей мере, один процессор для выполнения тактовой синхронизации с соседней сетевой системой с использованием принимаемого первого параметра и второго параметра, при этом первый параметр может включать в себя информацию, связанную со временем задержки в линии связи между соседней сетевой системой и сетевой системой, содержащей UPF, и временем пребывания терминала, базовой станции и UPF сетевой системы, содержащей UPF, и второй параметр может включать в себя информацию, связанную со временем задержки в транзитном соединении между базовой станцией и UPF.
[16] В соответствии с другим аспектом раскрытия сущности, предусмотрен терминал в системе беспроводной связи. Терминал включает в себя приемо-передающее устройство для приема третьего параметра для тактовой синхронизации из базовой станции и, по меньшей мере, один процессор для выполнения тактовой синхронизации с соседней сетевой системой с использованием принимаемого третьего параметра и четвертого параметра, при этом третий параметр может включать в себя информацию, связанную со временем задержки в линии связи между соседней сетевой системой и сетевой системой, содержащей UPF, и временем задержки в линии радиосвязи между терминалом и базовой станцией сетевой системы, содержащей UPF, и четвертый параметр может включать в себя информацию, связанную со временем пребывания терминала.
[17] Другие аспекты, преимущества и характерные признаки раскрытия сущности должны становиться очевидными специалистам в данной области техники из нижеприведенного подробного описания, которое, при рассмотрении вместе с прилагаемыми чертежами, раскрывает различные варианты осуществления раскрытия сущности.
Краткое описание чертежей
[18] Вышеуказанные и другие примерные аспекты, признаки и преимущества конкретных вариантов осуществления раскрытия сущности должны становиться более понятными из нижеприведенного описания, рассматриваемого вместе с прилагаемыми чертежами, на которых:
[19] Фиг. 1 иллюстрирует систему беспроводной связи согласно варианту осуществления раскрытия сущности;
[20] Фиг. 2 иллюстрирует конфигурацию базовой станции в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[21] Фиг. 3 иллюстрирует конфигурацию терминала в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[22] Фиг. 4 иллюстрирует конфигурацию базового сетевого объекта в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[23] Фиг. 5 иллюстрирует блок-схему последовательности операций способа для функции пользовательской плоскости (UPF) в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[24] Фиг. 6 иллюстрирует блок-схему последовательности операций способа для терминала в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[25] Фиг. 7 иллюстрирует способ для измерения времени задержки между соседними чувствительными ко времени сетевыми (TSN) системами в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[26] Фиг. 8 иллюстрирует способ тактовой синхронизации между TSN-системами в системе беспроводной связи согласно варианту осуществления раскрытия сущности;
[27] Фиг. 9 иллюстрирует способ тактовой синхронизации сети, которая поддерживает первую сетевую систему согласно варианту осуществления раскрытия сущности;
[28] Фиг. 10 иллюстрирует пример способа для поддержки TSN посредством межсетевого взаимодействия сети, поддерживающей первую сетевую систему, и сети, поддерживающей вторую сетевую систему согласно варианту осуществления раскрытия сущности;
[29] Фиг. 11 иллюстрирует пример тактовой синхронизации модели на основе линий связи, если вторая сетевая система представляет собой линию связи TSN согласно варианту осуществления раскрытия сущности;
[30] Фиг. 12 иллюстрирует способ для предоставления класса качества обслуживания (QoS) во второй сетевой системе согласно варианту осуществления раскрытия сущности;
[31] Фиг. 13 иллюстрирует способ трассировки задержки в транзитном соединении (BH) согласно варианту осуществления раскрытия сущности;
[32] Фиг. 14 иллюстрирует способ трассировки задержки при радиосвязи согласно варианту осуществления раскрытия сущности;
[33] Фиг. 15 иллюстрирует пример процесса тактовой синхронизации мостовой модели, если вторая сетевая система представляет собой мост TSN согласно варианту осуществления раскрытия сущности;
[34] Фиг. 16 иллюстрирует способ тактовой синхронизации с использованием восходящих линий связи (UL) сети, поддерживающей первую сетевую систему и сеть на основе мостовой модели согласно варианту осуществления раскрытия сущности;
[35] Фиг. 17 иллюстрирует способ тактовой синхронизации с использованием нисходящих линий связи (DL) сети, поддерживающей первую сетевую систему, и сети на основе мостовой модели согласно варианту осуществления раскрытия сущности;
[36] Фиг. 18 иллюстрирует способ тактовой синхронизации с использованием DL сети, поддерживающей первую сетевую систему, и сети на основе интегрированной модели согласно варианту осуществления раскрытия сущности; и
[37] Фиг. 19 иллюстрирует пример тактовой синхронизации с использованием DL сети, поддерживающей первую сетевую систему, и сети на основе интегрированной модели согласно варианту осуществления раскрытия сущности.
[38] На всех чертежах, аналогичные номера ссылок должны пониматься как ссылающиеся на аналогичные части, компоненты и структуры.
Оптимальный режим осуществления изобретения
[39] Нижеприведенное описание со ссылкой на прилагаемые чертежи предоставляется для того, чтобы помогать в полном понимании различных вариантов осуществления раскрытия сущности, заданного посредством формулы изобретения и ее эквивалентов. Оно включает в себя различные сведения для того, чтобы помогать в этом понимании, но они должны рассматриваться просто как примерные. Соответственно, специалисты в данной области техники должны признавать, что различные изменения и модификации различных вариантов осуществления, описанных в данном документе, могут вноситься без отступления от сущности и объема раскрытия сущности. Помимо этого, описания хорошо известных функций и конструкций могут опускаться для ясности и краткости.
[40] Термины и слова, используемые в нижеприведенном описании и в формуле изобретения, не ограничены библиографическими значениями, а используются автором изобретения просто для того, чтобы обеспечивать ясное и согласованное понимание раскрытия сущности. Соответственно, специалистам в данной области техники должно быть очевидным, что нижеприведенное описание различных вариантов осуществления раскрытия сущности предоставляется только в целях иллюстрации, а не в целях ограничения раскрытия сущности, заданного посредством прилагаемой формулы изобретения и ее эквивалентов.
[41] Следует понимать, что формы единственного числа "a", "an" и "the" включают в себя несколько объектов ссылки, если контекст явно не предписывает иное. Таким образом, например, ссылка на "поверхность компонента" включает в себя ссылку на одну или более таких поверхностей.
[42] В различных вариантах осуществления раскрытия сущности, которые описываются ниже, в дальнейшем описывается аппаратный подход в качестве примера. Тем не менее, поскольку различные варианты осуществления раскрытия сущности включают в себя технологию с использованием как аппаратных средств, так и программного обеспечения, различные варианты осуществления раскрытия сущности не исключают программный подход.
[43] Далее, раскрытие сущности относится к оборудованию и способу для синхронизации с использованием сети беспроводной связи в системе беспроводной связи. В частности, раскрытие сущности предоставляет технологию для поддержки тактовой синхронизации сети беспроводной связи, посредством определения времени пребывания объектов в сети беспроводной связи, задержки при радиосвязи между терминалом и базовой станцией и задержки в транзитном соединении (BH) между базовой станцией и базовым сетевым объектом в системе беспроводной связи.
[44] Термины, идентифицирующие узлы доступа, термины, указывающие сетевые объекты, термины, указывающие сообщения, термины, указывающие интерфейсы между сетевыми объектами, и термины, указывающие различную идентификационную информацию, которые используются в нижеприведенном описании, служат для пояснения. Соответственно, раскрытие сущности не ограничено терминами, которые описываются, и может использовать другие термины, имеющие технически идентичный смысл.
[45] Чтобы упрощать пояснения, раскрытие сущности приспосабливает термины и названия, заданные в системе пятого поколения (5GS) согласно последнему стандарту ив новом стандарте радиосвязи (NR), заданном посредством Партнерского проекта третьего поколения (3GPP), в числе текущих стандартов связи. В частности, раскрытие сущности не ограничено посредством терминов и названий и может в равной степени применяться к сети беспроводной связи согласно другому стандарту. В частности, раскрытие сущности может применяться к 3GPP 5GS/NR.
[46] Фиг. 1 иллюстрирует систему беспроводной связи согласно варианту осуществления раскрытия сущности.
[47] Ссылаясь на фиг. 1, система беспроводной связи включает в себя сеть 102 радиодоступа (RAN) и базовую сеть 104 (CN).
[48] RAN 102 представляет собой сеть, непосредственно соединенную с пользовательским устройством, например, терминалом 120 и представляет собой инфраструктуру для предоставления радиодоступа к терминалу 120. RAN 102 включает в себя набор базовых станций, включающих в себя базовую станцию 110, и базовые станции могут выполнять связь через интерфейсы, сформированные между ними По меньшей мере, некоторые интерфейсы между базовыми станциями могут быть проводными или беспроводными. Базовая станция 110 может разделяться на центральный модуль (CU) и распределенный модуль (DU) в структуре. В этом случае, один CU может управлять множеством DU. Базовая станция 110 может называться "точкой доступа (AP)", "сетевым узлом B поколения (gNB)", "узлом пятого поколения (5G-узлом)", "беспроводной точкой", "точкой передачи/приема (TRP)" либо согласно другому термину, имеющему технически эквивалентный смысл. Терминал 120 может осуществлять доступ к RAN 102 и обменивается данными с базовой станцией 110 по радиоканалу. Терминал 120 может называться "абонентским устройством (UE)", "мобильной станцией", "абонентской станцией", "удаленным терминалом", беспроводным терминалом" или "пользовательским устройством" либо согласно другому термину, имеющему технически эквивалентный смысл.
[49] Базовая сеть 104 может, в качестве сети для управления всей системой, управлять RAN 102 и обрабатывать данные и управляющие сигналы для терминала 120, которые передаются и принимаются по RAN 102. Базовая сеть104 выполняет различные функции, такие как управление пользовательской плоскостью и плоскостью управления, управление мобильностью, управление информацией абонентов, тарификация и оплата услуг, межсетевое взаимодействие с другим типом системы (например, с системой по стандарту долгосрочного развития (LTE)) Чтобы выполнять такие различные функции, базовая сеть 104 может включать в себя множество объектов, которые функционально разделяются с помощью различных сетевых функций (NF). Например, базовая сеть 104 может включать в себя функцию 130a управления доступом и мобильностью (AMF), функцию 130b управления сеансами (SMF), функцию 130c пользовательской плоскости (UPF), функцию 130d политик тарификации и оплаты услуг (PCF), функцию 130e сетевого репозитория (NRF), функцию 130f управления пользовательскими данными (UDM), функцию 130g обеспечения доступа к сети (NEF) и унифицированный репозиторий 130h данных (UDR).
[50] Терминал 120 соединяется с RAN 102 и осуществляет доступ к AMF 130a, которая выполняет функцию управления мобильностью базовой сети 104. AMF 130a представляет собой функцию или устройство, которая управляет как доступом для RAN 102, так и управлением мобильностью для терминала 120. SMF 130b представляет собой NF, которая управляет сеансом AMF 130a соединяется с SMF 130b, и AMF 130a маршрутизирует связанное с сеансом сообщение терминала 120 в SMF 130b. SMF 130b выделяет ресурсы пользовательской плоскости, которые должны предоставляться в терминал 120, посредством соединения с UPF 130c и устанавливает туннель для передачи данных между базовой станцией 110 и UPF 130c. PCF 130d управляет информацией политик тарификации и оплаты услуг для сеанса, используемого посредством терминала 120. NRF 130e сохраняет информацию NF, установленных в сети поставщика услуг мобильной связи, и уведомляет сохраненную информацию. NRF 130e может соединяться со всеми NF. При работе в сети поставщика, NF регистрируются в NRF 130e и в силу этого образом уведомляют NRF 130e в отношении того, что соответствующая NF работает в сети. UDM 130f представляет собой NF, которая выполняет аналогичную роль с сервером собственных абонентов (HSS) 4G-сети и сохраняет информацию по подписке терминала 120 либо контекст, используемый посредством терминала 120 в сети.
[51] NEF 130g соединяет сторонний сервер и NF 5G-системы мобильной связи. Помимо этого, NEF 130g предоставляет или обновляет данные в UDR 130h или получает данные. UDR 130h сохраняет информацию по подписке терминала 120, сохраняет информацию политик, сохраняет данные, доступные извне, или сохраняет необходимую информацию для стороннего приложения. Помимо этого, UDR 130h предоставляет сохраненные данные в другую NF.
[52] Фиг. 2 иллюстрирует конфигурацию базовой станции в системе беспроводной связи согласно варианту осуществления раскрытия сущности. Конфигурация по фиг. 2 может пониматься как конфигурация базовой станции 110. Такой термин, как "часть" или "~ er", используемый далее, указывает единицу для обработки, по меньшей мере, одной функции или операции и может реализовываться с использованием аппаратных средств, программного обеспечения либо комбинации аппаратных средств и программного обеспечения.
[53] Ссылаясь на фиг. 2, базовая станция включает в себя модуль 210 беспроводной связи, модуль 220 транзитной связи, модуль 230 хранения данных и модуль 240 управления.
[54] Модуль 210 беспроводной связи может передавать и принимать сигналы по радиоканалу. Например, модуль 210 беспроводной связи выполняет функцию преобразования между сигналом в полосе модулирующих частот и битовой строкой согласно стандарту физического уровня системы. Например, при передаче данных, модуль 210 беспроводной связи формирует комплексные символы посредством кодирования и модуляции передаваемой битовой строки. Кроме того, при приеме данных модуль 210 беспроводной связи восстанавливает принимаемую битовую строку посредством демодуляции и декодирования сигнала в полосе модулирующих частот.
[55] Кроме того, модуль 210 беспроводной связи преобразует с повышением частоты сигнал в полосе модулирующих частот в сигнал в полосе радиочастот (RF), передает его через антенну и преобразует с понижением частоты сигнал в полосе RF-частот, принимаемый через антенну, в сигнал в полосе модулирующих частот. Для этого, модуль 210 беспроводной связи может включать в себя фильтр передачи, фильтр приема, усилитель, микшер, осциллятор, цифро-аналоговый преобразователь (DAC), аналого-цифровой преобразователь (ADC) и т.п. Помимо этого, модуль 210 беспроводной связи может включать в себя множество трактов передачи и приема. Дополнительно, модуль 210 беспроводной связи может включать в себя, по меньшей мере, одну антенную решетку, включающую в себя множество антенных элементов.
[56] С точки зрения аппаратных средств, модуль 210 беспроводной связи может включать в себя цифровой модуль и аналоговый модуль, и аналоговый модуль может включать в себя множество субмодулей согласно рабочей мощности и рабочей частоте. Цифровой модуль может включать в себя, по меньшей мере, один процессор (к примеру, процессор цифровых сигналов (DSP)).
[57] В связи с этим, модуль 210 беспроводной связи передает и принимает сигналы. Следовательно, весь или часть модуля 210 беспроводной связи может называться "передающим устройством", "приемным устройством" или "приемо-передающим устройством". Ниже по тексту, передача и прием по радиоканалу охватывают вышеуказанную обработку модуля 210 беспроводной связи.
[58] Модуль 220 транзитной связи предоставляет интерфейс для обмена данными с другими узлами в сети. Таким образом, модуль 220 транзитной связи преобразует битовую строку, передаваемую из базовой станции в другой узел, например, в другой узел доступа, другую базовую станцию, верхний узел или базовую сеть, в физический сигнал, и преобразует физический сигнал, принимаемый из другого узла, в битовую строку.
[59] Модуль 230 хранения данных сохраняет базовую программу для работы базовой станции, прикладную программу и данные, такие как информация настроек. Модуль 230 хранения данных может включать в себя энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство либо комбинацию энергозависимого запоминающего устройства и энергонезависимого запоминающего устройства. Модуль 230 хранения данных предоставляет сохраненные данные в ответ на запрос модуля 240 управления.
[60] Модуль 240 управления управляет общими операциями мобильного терминала. Например, модуль 240 управления передает и принимает сигналы через модуль 210 беспроводной связи или модуль 220 транзитной связи. Кроме того, модуль 240 управления записывает и считывает данные в/из модуля 230 хранения данных. Модуль 240 управления может выполнять функции стека протоколов, запрашиваемые посредством стандарта связи. Согласно другому варианту осуществления, стек протоколов может включаться в модуль 210 беспроводной связи. Для достижения этого, модуль 240 управления может включать в себя, по меньшей мере, один процессор. Согласно различным вариантам осуществления, модуль 240 управления может управлять выполнением синхронизации с использованием сети беспроводной связи. Например, модуль 240 управления может управлять базовой станцией таким образом, чтобы проводить операции, которые поясняются согласно различным вариантам осуществления.
[61] Фиг. 3 иллюстрирует конфигурацию терминала в системе беспроводной связи согласно варианту осуществления раскрытия сущности. Конфигурация по фиг. 3 может пониматься как конфигурация терминала 120. Такой термин, как "часть" или "~ er" указывает единицу для обработки, по меньшей мере, одной функции или операции и может реализовываться с использованием аппаратных средств, программного обеспечения либо комбинации аппаратных средств и программного обеспечения.
[62] Ссылаясь на фиг. 3, терминал включает в себя модуль 310 связи, модуль 320 хранения данных и модуль 330 управления.
[63] Модуль 310 связи может передавать и принимать сигналы по радиоканалу. Например, модуль 310 связи выполняет функцию преобразования между сигналом в полосе модулирующих частот и битовой строкой согласно стандарту физического уровня системы. Например, при передаче данных, модуль 310 связи формирует комплексные символы посредством кодирования и модуляции передаваемой битовой строки. Кроме того, при приеме данных, модуль 310 связи восстанавливает принимаемую битовую строку посредством демодуляции и декодирования сигнала в полосе модулирующих частот. Кроме того, модуль 310 связи преобразует с повышением частоты сигнал в полосе модулирующих частот в сигнал в полосе RF, передает его через антенну и преобразует с понижением частоты сигнал в полосе RF-частот, принимаемый через антенну, в сигнал в полосе модулирующих частот. Например, модуль 310 связи может включать в себя фильтр передачи, фильтр приема, усилитель, микшер, осциллятор, DAC, ADC и т.п.
[64] Помимо этого, модуль 310 связи может включать в себя множество трактов передачи и приема. Дополнительно, модуль 310 связи может включать в себя, по меньшей мере, одну антенную решетку, включающую в себя множество антенных элементов. С точки зрения аппаратных средств, модуль 310 связи может включать в себя цифровую схему и аналоговую схему (к примеру, интегрированную RF-схему (RFIC)). В данном документе, цифровая схема и аналоговая схема могут реализовываться как единый комплект. Кроме того, модуль 310 связи может включать в себя множество RF-цепочек. Дополнительно, модуль 310 связи может выполнять формирование диаграммы направленности.
[65] В связи с этим, модуль 310 связи передает и принимает сигналы. Следовательно, весь или часть модуля 310 связи может называться "передающим устройством", "приемным устройством или "приемо-передающим устройством". Далее, передача и прием по радиоканалу охватывают вышеуказанную обработку модуля 310 связи.
[66] Модуль 320 хранения данных сохраняет базовую программу для работы терминала, прикладную программу и данные, такие как информация настроек. Модуль 320 хранения данных может включать в себя энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство либо комбинацию энергозависимого запоминающего устройства и энергонезависимого запоминающего устройства. Модуль 320 хранения данных предоставляет сохраненные данные согласно запросу модуля 330 управления.
[67] Модуль 330 управления управляет общими операциями терминала. Например, модуль 330 управления передает и принимает сигналы через модуль 310 связи. Кроме того, модуль 330 управления записывает и считывает данные в/из модуля 320 хранения данных. Модуль 330 управления может выполнять функции стека протоколов, требуемые посредством стандарта связи. Для достижения этого, модуль 330 управления может включать в себя, по меньшей мере, один процессор или микропроцессор либо может представлять собой часть процессора. Часть модуля 310 связи и модуля управления 330 может называться "процессором связи (CP)". Согласно различным вариантам осуществления, модуль 330 управления может управлять выполнением синхронизации с использованием сети беспроводной связи. Например, модуль управления 330 может управлять терминалом таким образом, чтобы проводить операции, которые должны поясняться, согласно различным вариантам осуществления.
[68] Фиг. 4 иллюстрирует конфигурацию 130 базового сетевого объекта в системе беспроводной связи согласно варианту осуществления раскрытия сущности. Конфигурация по фиг. 4 может пониматься как конфигурация устройства, имеющего, по меньшей мере, одну функцию 130a-13h по фиг. 1. Такой термин, как "часть" или "~ er" указывает единицу для обработки, по меньшей мере, одной функции или операции и может реализовываться с использованием аппаратных средств, программного обеспечения либо комбинации аппаратных средств и программного обеспечения.
[69] Ссылаясь на фиг. 4, базовый сетевой объект включает в себя модуль 410 связи, модуль 420 хранения данных и модуль 430 управления.
[70] Модуль 410 связи предоставляет интерфейс для обмена данными с другими устройствами в сети. Таким образом, модуль 410 связи преобразует битовую строку, передаваемую из базового сетевого объекта в другое устройство, и преобразует физический сигнал, принимаемый из другого устройства, в битовую строку. Таким образом, модуль 410 связи может передавать и принимать сигналы. Следовательно, модуль 410 связи может называться "модемом", "передающим устройством", "приемным устройством" или "приемо-передающим устройством". Модуль 410 связи позволяет базовому сетевому объекту обмениваться данными с другими устройствами или системой через транзитное соединение (к примеру, проводное транзитное соединение или беспроводное транзитное соединение)
[71] Модуль 420 хранения данных сохраняет базовую программу для работы базового сетевого объекта, прикладную программу и данные, такие как информация настроек. Модуль 420 хранения данных может включать в себя энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство либо комбинацию энергозависимого запоминающего устройства и энергонезависимого запоминающего устройства. Модуль 420 хранения данных предоставляет сохраненные данные в ответ на запрос модуля 430 управления.
[72] Модуль 430 управления управляет общими операциями базового сетевого объекта. Например, модуль 430 управления передает и принимает сигналы через модуль 410 связи. Кроме того, модуль 430 управления записывает и считывает данные в/из модуля 420 хранения данных. Для достижения этого, модуль 430 управления может включать в себя, по меньшей мере, один процессор. Согласно различным вариантам осуществления, модуль 430 управления может управлять выполнением синхронизации с использованием сети беспроводной связи. Например, модуль 430 управления может управлять базовым сетевым объектом таким образом, чтобы проводить операции, которые поясняются согласно различным вариантам осуществления.
[73] Фиг. 5 иллюстрирует блок-схему последовательности операций способа для UPF в системе беспроводной связи согласно варианту осуществления раскрытия сущности. Фиг. 5 иллюстрирует способ работы UPF 130c в восходящей линии связи.
[74] Ссылаясь на фиг. 5, на этапе 501, UPF может принимать первый параметр для тактовой синхронизации из базовой станции. Таким образом, первый параметр может включать в себя время задержки линии 1 связи (задержку в линии 1 связи, D_Link1) между ведущим узлом TSN-системы и сетью, включающей в себя терминал, базовую станцию и UPF, время пребывания кадра в UE (R_UE), задержку при радиосвязи (D_Air) между терминалом и базовой станцией и время пребывания кадра в gNB (R_gNB).
[75] На этапе 503, UPF может выполнять тактовую синхронизацию с соседней сетевой системой с использованием принимаемого первого параметра и второго параметра. Таким образом, второй параметр может включать в себя BH-задержку (D_BH) между базовой станцией и UPF и время пребывания кадра в UPF (R_RPF). В данном документе, задержка в транзитном соединении может предварительно определяться и сохраняться в UPF. UPF может осуществлять тактовую синхронизацию с TSN-системой посредством применения первого параметра и второго параметра для поля коррекции для тактовой синхронизации.
[76] Фиг. 6 иллюстрирует блок-схему последовательности операций способа для терминала в системе беспроводной связи согласно варианту осуществления раскрытия сущности. Фиг. 6 иллюстрирует способ работы терминала 120 в нисходящей линии связи.
[77] Ссылаясь на фиг. 6, на этапе 601, терминал может принимать третий параметр для тактовой синхронизации из базовой станции. Таким образом, третий параметр может включать в себя время задержки линии 2 связи (задержку в линии 2 связи, D_Link2) между TSN-коммутатором и сетью, включающей в себя терминал, базовую станцию и UPF, время (R_CN) пребывания в базовой сети и время (R_RAN) пребывания в RAN.
[78] На этапе 603, UPF может выполнять тактовую синхронизацию с соседней сетевой системой с использованием принимаемого третьего параметра и четвертого параметра. Таким образом, четвертый параметр может включать в себя время пребывания кадра в терминале и время задержки линии 3 связи (задержку в линии 3 связи, D_Link3) между ведомым узлом TSN-системы и сетью, включающей в себя терминал, базовую станцию и UPF. Терминал может выполнять тактовую синхронизацию с TSN-системой посредством применения третьего параметра и четвертого параметра для поля коррекции для тактовой синхронизации.
[79] В общем, процесс тактовой синхронизации в сети (NW), поддерживающей 802.1AS, является идентичным процессу тактовой синхронизации по стандарту Института инженеров по электротехнике и радиоэлектронике (IEEE) 1588 по базовым принципам, но отличается по процедуре. Например, процесс периодических измерений времени задержки в линии связи между двумя соседними TSN-системами (к примеру, конечной станцией или мостом) и процедура обновления поля коррекции, включающего в себя время пребывания моста, могут включаться в вышеуказанный отличающийся процесс. В различных вариантах осуществления, конечная станция может указывать узел, который может служить в качестве ведущего узла или ведомого узла. Далее, фиг. 7 и фиг. 8 предоставляют конкретный способ работы для вышеуказанных процессов.
[80] Фиг. 7 иллюстрирует способ для измерения времени задержки между соседними TSN-системами в системе беспроводной связи согласно варианту осуществления раскрытия сущности.
[81] Ссылаясь на фиг. 7, равноправный инициатор 702 измерения задержки запрашивает измерение времени задержки, и равноправный ответчик 704 по измерению задержки принимает запрос на измерения времени задержки. В различных вариантах осуществления, равноправный инициатор измерения задержки может указывать узел, который запрашивает измерение времени задержки, и равноправный ответчик по измерению задержки может указывать узел, который принимает запрос на измерения времени задержки. Равноправный инициатор измерения задержки и равноправный ответчик по измерению задержки могут указывать различные TSN-системы. Например, равноправный инициатор измерения задержки и равноправный ответчик по измерению задержки могут указывать мост и мост, мост и ведущий узел и мост и ведомый узел, соответственно.
[82] На этапе 701, равноправный инициатор 702 измерения задержки может передавать в равноправный ответчик 704 по измерению задержки во время t1 712, Ethernet-кадр Pdelay_Req для запроса измерения времени задержки из равноправного ответчика 704 по измерению задержки. Равноправный ответчик 704 по измерению задержки может принимать Ethernet-кадр Pdelay_Req во время t2 714 и сохранять время t2 714 приема кадров. В различных вариантах осуществления, время tir 720 может указывать разность времени t1 712 и времени t2 714.
[83] На этапе 703, равноправный ответчик 704 по измерению задержки может передавать в равноправный инициатор 702 измерения задержки во время t3 716 Ethernet-кадр Pdelay_Resp, включающий в себя информацию сохраненного времени t2 714. Затем, равноправный ответчик 704 по измерению задержки может сохранять время t3 716 передачи Ethernet-кадра Pdelay_Resp.
[84] На этапе 705, равноправный ответчик 704 по измерению задержки может передавать в равноправный инициатор 702 измерения задержки Ethernet-кадр Pdelay_Resp_Follow_Up, включающий в себя информацию сохраненного времени t3 716. Равноправный инициатор 702 измерения задержки может принимать Ethernet-кадр Pdelay_Resp во время t4 718. Затем, равноправный инициатор 702 измерения задержки может принимать Ethernet-кадр Pdelay_Resp_Follow_Up. Посредством идентификации Ethernet-кадра Pdelay_Resp и Ethernet-кадра Pdelay_Resp_Follow_Up, равноправный инициатор 702 измерения задержки может получать время t2 714 и время t3 716. Равноправный инициатор 702 измерения задержки может определять время D задержки между соседними TSN-системами, с использованием вышеупомянутого времени t1 712, времени t2 714, времени t3 716 и времени t4 718. Время D задержки между соседними TSN-системами может задаваться на основе уравнения 1.
[85] D = ((t2-t1) + (t4-t3))/2...уравнение 1
[86] В уравнении 1, D может обозначать время задержки между соседними TSN-системами, t1 может обозначать время, в которое равноправный инициатор 702 измерения задержки запрашивает измерение времени задержки из равноправного ответчика 704 по измерению задержки, t2 может обозначать время, в которое равноправный ответчик 704 по измерению задержки принимает Ethernet-кадр Pdelay_Req из равноправного инициатора 702 измерения задержки, t3 может обозначать время, в которое равноправный ответчик 704 по измерению задержки передает Ethernet-кадр Pdelay_Resp в равноправный инициатор 702 измерения задержки, и t4 может обозначать время, в которое равноправный инициатор 702 измерения задержки принимает Ethernet-кадр Pdelay_Resp из равноправного ответчика 704 по измерению задержки. В различных вариантах осуществления, время tri 722 может обозначать разность времени t3 716 и времени t4 718. В различных вариантах осуществления, время задержки между соседними TSN-системами может определяться как среднее значение времени tir 720 и времени tri 722, при этом среднее значение времени tir 720 и времени tri 722 может выражаться как средняя задержка meanPathDelay в тракте. В различных вариантах осуществления, если система 710 с привязкой по времени инициатора передает сигнал в систему 708 с привязкой по времени ответчика, может возникать задержка, соответствующая времени tir 720. Если система 708 с привязкой по времени ответчика передает сигнал в систему 710 с привязкой по времени инициатора, может возникать задержка, соответствующая времени tri 722. В различных вариантах осуществления, время tir 720 может определяться посредством разности средней задержки в тракте и значения асимметрии задержки (meanPathDelay - delayAsymmetry). Время tri 722 может определяться посредством суммы средней задержки в тракте и значения асимметрии задержки (meanPathDelay+delayAsymmetry). В различных вариантах осуществления, равноправный ответчик 704 по измерению задержки может сохранять временные метки 706, известные посредством равноправного инициатора 702 измерения задержки. Например, временные метки 706, известные посредством равноправного инициатора 702 измерения задержки, могут включать в себя t1, t1, t2 и t4 и t1, t2, t3 и t4. В различных вариантах осуществления, время задержки между соседними TSN-системами может периодически вычисляться с предварительно определенными интервалами. Периодическое вычисление времени задержки может проводиться с помощью neighborRateRatio между TSN-системами. Например, neighborRateRatio может определяться на основе отношения (локальная тактовая частота i/локальная тактовая частота r) локальной тактовой частоты i равноправного инициатора 702 измерения задержки и локальной тактовой частоты r равноправного ответчика 704 по измерению задержки. В различных вариантах осуществления, локальная тактовая частота может указывать собственную частоту колебаний соответствующей TSN-системы, обратное значение периода и так далее
[87] Фиг. 8 иллюстрирует способ тактовой синхронизации между TSN-системами в системе беспроводной связи согласно варианту осуществления раскрытия сущности.
[88] Ссылаясь на фиг. 8, система с привязкой по времени может указывать TSN-систему. На этапе 801, ведущий порт 802-1 системы i-1 802 с привязкой по времени может передавать синхрокадр в ведомый порт 808 системы i 804 с привязкой по времени во время ts, i-1 812. Ведомый порт 808 может принимать синхрокадр во время tr, i 816. Разность времени ts i-1 812 и времени tr, i 816 может указывать задержку i-1 на распространение 814 между TSN-системой i-1 802 и TSN-системой i 804.
[89] На этапе 803, ведущий порт 802-1 системы i-1 802 с привязкой по времени может передавать Follow_Up-кадр в ведомый порт 808 системы I 804 с привязкой по времени. Follow_Up-кадр может включать в себя параметры preciseOriginTimestamp, correctionFieldi-1 и rateRatioi-1. preciseOriginTimestamp может обозначать время, в которое главный ведущий узел TSN-области передает синхрокадр. correctionFieldi-1 может обозначать значение, отражающее разность preciseOriginTimestamp и времени передачи синхрокадров системы i-1 802 с привязкой по времени. rateRatioi-1 обозначает отношение тактовой частоты главного ведущего узла и тактовой частоты TSN-системы i-1 802 и может вычисляться как (тактовая частота главного ведущего узла)/(локальная тактовая частота i-1). В различных вариантах осуществления, главный ведущий узел может указывать ведущий узел, который первоначально передает синхрокадр для тактовой синхронизации в TSN-системе.
[90] На этапе 805, ведущий порт 810 системы i 804 с привязкой по времени может передавать синхрокадр в ведомый порт 806-1 системы i+1 806 с привязкой по времени во время ts, i 820. Ведомый порт 806-1 может принимать синхрокадр во время tr, i+1 824. В это время, разность времени ts, i 820 и времени tr, i+1 824 может указывать задержку i 822 на распространение TSN-системы i 804 и TSN-системы i+1 806.
[91] На этапе 807, ведущий порт 810 системы i 804 с привязкой по времени может передавать Follow_Up-кадр в ведомый порт 806-1 системы i+1 806 с привязкой по времени. Follow_Up-кадр может включать в себя параметры preciseOriginTimestamp, correctionFieldi and rateRatioi. correctionFieldi и rateRatioi могут вычисляться посредством системы i 804 с привязкой по времени. correctionFieldi может вычисляться как correctionFieldi=correctionFieldi-1+LinkDelayi-1+ResidenceTimei. LinkDelayi-1 обозначает время D задержки между TSN-системами, как описано на фиг. 7, и может периодически вычисляться с предварительно определенными интервалами и сохраняться в качестве среднего значения. LinkDelayi-1 может указывать задержку i-1 на распространение. В различных вариантах осуществления, время пребывания i 818 может указывать время пребывания в TSN-системе i 804 и может указывать разность времени tr, i 816, в которое TSN-система i 804 принимает синхрокадр, и времени ts, i 820, в которое TSN-система i 804 передает синхрокадр в TSN-систему i+1 806. rateRatioi указывает отношение локальных тактовых частот TSN-системы i 804 и TSN-системы i+1 806 и может вычисляться как rateRatioi = (локальная тактовая частота i-1) rateRatioi-1 x / (локальная тактовая частота i). (Локальная тактовая частота i-1) / (локальная тактовая частота i) может вычисляться как neighborRateRatio при периодическом измерении времени задержки по фиг. 7 и обновляться постоянно. В общем, при конструировании локальной вычислительной Ethernet-сети (LAN), значение задержки в линии связи составляет сотни нс, rateRatio составляет значение, близкое к 1, время пребывания разрешается вплоть до 10 мс, и, соответственно, точная транспортировка значения времени пребывания является наиболее важной для TSN-системы. В различных вариантах осуществления, rateRatio может быть значением, имеющим разность ниже 200 bpm на основе 1.
[92] Фиг. 9 иллюстрирует способ тактовой синхронизации сети, которая поддерживает первую сетевую систему согласно варианту осуществления раскрытия сущности.
[93] Ссылаясь на фиг. 9, первая сетевая система может включать в себя IEEE 802.1AS. На фиг. 9, ведущий узел 910 может передавать синхрокадр и затем передавать Follow_Up-кадр. Таким образом, время, в которое ведущий узел 910 передает синхрокадр, может задаваться равным T1 и может задаваться в качестве preciseOriginTimestamp во временных метках, и значение коррекции поля коррекции может задаваться равным 0. На фиг. 9, задержка D_Link1 901 линии 1 связи обозначает задержку на распространение линии 1 связи между ведущим узлом 910 и первым мостом 920, задержка D_Link2 905 линии 2 связи обозначает задержку на распространение линии 2 связи между первым мостом 920 и вторым мостом 930, и задержка D_Link3 909 линии 3 связи обозначает задержку на распространение линии 3 связи между вторым мостом 930 и ведомым узлом 940. D_Link1 901, D_Link2 905 и D_Link3 909 могут периодически измеряться между соседними узлами и сохраняться в качестве среднего значения. Время R_Bridge1 903 пребывания первого моста и время R_Bridge2 907 пребывания второго моста представляют собой время пребывания кадра в соответствующем мосту и могут вычисляться в реальном времени для каждого синхрокадра и сохраняться в Follow_Up-кадре.
[94] Фиг. 10 иллюстрирует пример способа для поддержки TSN посредством межсетевого взаимодействия сети, поддерживающей первую сетевую систему, и сети, поддерживающей вторую сетевую систему согласно варианту осуществления раскрытия сущности.
[95] Ссылаясь на фиг. 10, первая сетевая система может включать в себя IEEE 802.1AS, и вторая сетевая система может включать в себя 3GPP. Таким образом, фиг. 10 классифицирует способы для поддержки TSN посредством межсетевого взаимодействия сети, поддетрживающей IEEE 802.1AS, и сети, поддерживающей 3GPP. Например, во-первых, модель 1010 на основе линий связи может задавать 5GS в качестве линии связи TSN. Во-вторых, мостовая модель 1020 может задавать 5GS в качестве моста TSN. В-третьих, интегрированная модель 1030 может задавать компоненты 5GS в качестве конечной станции или моста TSN-системы. 5GS может указывать сетевую систему, включающую в себя терминал, базовую станцию и UPF.
[96] Фиг. 11 иллюстрирует пример тактовой синхронизации модели на основе линий связи, если вторая сетевая система представляет собой линию связи TSN согласно варианту осуществления раскрытия сущности.
[97] Ссылаясь на фиг. 11, вторая сетевая система может включать в себя 5GS. Таким образом, фиг. 11 иллюстрирует пример тактовой синхронизации модели на основе линий связи, если 5GS задается в качестве линии связи TSN. На фиг. 11, 5GS, которая представляет собой сетевую систему, включающую в себя терминал 120, базовую станцию 110 и UPF 130c, может задаваться в качестве линии связи между ведущим узлом 1110 (или главным ведущим узлом) и вторым мостом 1120 двух соседних TSN-систем. В это время, 5GS может иметь время D_3GPP 1107 задержки. Ведущий узел 1110 и второй мост 1120, которые представляют собой две соседние TSN-системы, могут периодически измерять, сохранять и использовать время D_3GPP 1107 задержки в качестве среднего значения. В это время, точность времени D_3GPP 1107 задержки может увеличиваться, если дисперсия времени задержки меньше порогового значения, и нет различия по направлению. Помимо этого, если время пребывания в терминале 120, базовой станции 110 и UPF 130c 5GS-области является постоянным, и направление является симметричным, и задержка при радиосвязи и BH-задержка являются постоянными и симметричными в направлении, точность времени задержки может считаться высокой. Чтобы предоставлять постоянное и симметричное время задержки, специальный класс качества обслуживания (QoS) для 5GS требуется. На фиг. 11, задержка D_Link1 1101 из линии 1 связи может указывать задержка на распространение между ведущим узлом 1110 и 5GS, время пребывания R_5GS 1103 5GS может указывать время пребывания в 5GS, включающей в себя терминал 120, базовую станцию 110 и UPF 130c, задержка D_Link2 1105 линии 2 связи может указывать задержку на распространение между 5GS и вторым мостом 1120, время1109 R_Bridge2 пребывания второго моста может указывать время пребывания кадра во втором мосту 1120, и задержка D_Link3 1111 линии 3 связи может указывать задержку на распространение между вторым мостом 1120 и ведомым узлом 1130. Теперь, фиг. 12 иллюстрирует процесс для предоставления QoS-класса в 5GS, чтобы предоставлять симметричное и постоянное время задержки.
[98] Фиг. 12 иллюстрирует способ для предоставления QoS-класса во второй сетевой системе согласно варианту осуществления раскрытия сущности.
[99] Ссылаясь на фиг. 12, QoS может применяться к Ethernet-кадру, связанному с измерением времени задержки и тактовой синхронизацией. На этапе 1201, базовая станция 110, UPF 130c, AMF/SMF 1210 и TCE/OAM/Mgmt_Sys/PCF 1220 могут определять значение BH_DELAY BH-задержки, которое является целевым значением времени задержки, с минимальным значением из значений, измеренных через трассировку BH-задержки.
[100] На этапе 1203, UPF 130c может сохранять определенное значение BH_DELAY BH-задержки. Хотя не проиллюстрировано на фиг. 12, UPF 130c может сообщать сохраненное значение BH-задержки BH_DELAY в систему управления (Mgmt_Sys) TCE/OAM/Mgmt_Sys/PCF 1220.
[101] На этапе 1205, терминал 120, базовая станция 110, UPF 130c, AMF/SMF 1210 и TCE/OAM/Mgmt_Sys/PCF 1220 могут определять значение AIR_DELAY задержки при радиосвязи. Например, значение задержки при радиосвязи может определяться как большее значение из значения задержки при радиосвязи в восходящей линии связи и значения задержки при радиосвязи в нисходящей линии связи.
[102] На этапе 1207, базовая станция 110 может сохранять определенное значение AIR_DELAY задержки при радиосвязи. Хотя на проиллюстрировано на фиг. 12, базовая станция 110 может сообщать сохраненное значение AIR_DELAY задержки при радиосвязи в систему управления TCE/OAM/Mgmt_Sys/PCF 1220.
[103] На этапе 1209, система управления TCE/OAM/Mgmt_Sys/PCF 1220 может запрашивать QoS-установление класса с фиксированной задержкой из SMF 130b AMF/SMF 1210 через PCF 130d. Сообщение с запросом на QoS-установление может включать в себя параметры, указывающие бюджет задержек при передаче пакетов (PDB), допуск по потерям и приоритет.
[104] На этапе 1211, SMF 130b AMF/SMF 1210 может передавать сообщение PDU_Session_Modification для запроса на модификацию сеанса на основе протокольных единиц данных (PDU) в UPF 130c. Сообщение с запросом на модификацию сеанса может включать в себя параметры, указывающие PDB, допуск по потерям и приоритет.
[105] На этапе 1213, UPF 130c может диспетчеризовать пакет нисходящей линии связи (PKT). Например, при приеме сообщения модификации PDU-сеанса, UPF 130c может вычислять время пребывания пакета нисходящей линии связи в UPF 130c с учетом сохраненного значения BH-задержки и выполнять диспетчеризацию с учетом приоритета пакета нисходящей линии связи. Без диспетчеризации на основе сохраненного значения BH-задержки, UPF 130c может отбрасывать пакет нисходящей линии связи, что приводит к тому, что потери последовательного пакета нисходящей линии связи опускаются ниже допуска по потерям. Если потери последовательного пакета нисходящей линии связи превышают допуск по потерям, UPF 130c может повторно диспетчеризовать пакет нисходящей линии связи посредством увеличения приоритета. Такая диспетчеризация предотвращает худший результат, чем без транспортировки пакетов, если пакет нисходящей линии связи не поступает в течение времени задержки. Допуск по потерям может определяться на основе TSN-окружения. В различных вариантах осуществления, пакетная передача в восходящей линии связи может не удовлетворяться просто посредством предоставления QoS 5GS, и пакет восходящей линии связи может диспетчеризоваться на основе приоритета.
[106] На этапе 1215, SMF 130b AMF/SMF 1210 может передавать N2-сообщение модификации сеанса (SM) в базовую станцию 110. N2 SM-сообщение служит для того, чтобы диспетчеризовать пакет восходящей линии связи.
[107] На этапе 1217, базовая станция 110, принимающая N2 SM-сообщение, может диспетчеризовать пакет восходящей линии связи с учетом значения BH-задержки. Без диспетчеризации пакета восходящей линии связи на основе сохраненного значения BH-задержки, базовая станция 110 может отбрасывать пакет восходящей линии связи, что приводит к тому, что потери последовательного пакета восходящей линии связи опускаются ниже допуска по потерям. Если потери последовательного пакета восходящей линии связи превышают допуск по потерям, базовая станция 110 может повторно диспетчеризовать пакет восходящей линии связи посредством увеличения приоритета. При диспетчеризации пакета нисходящей линии связи, базовая станция 110 может диспетчеризовать пакет нисходящей линии связи с учетом значения AIR_DELAY задержки при радиосвязи. Без диспетчеризации пакета нисходящей линии связи на основе сохраненного значения задержки при радиосвязи, базовая станция 110 может отбрасывать пакет нисходящей линии связи, что приводит к тому, что потери последовательного пакета нисходящей линии связи опускаются ниже допуска по потерям. Если потери последовательного пакета нисходящей линии связи превышают допуск по потерям, базовая станция 110 может повторно диспетчеризовать пакет нисходящей линии связи посредством увеличения приоритета. В различных вариантах осуществления, базовая станция 110, которая сохраняет значение задержки при радиосвязи, может вычислять значение BH-задержки с использованием разности PDB-AIR_DELAY PDB и значения задержки при радиосвязи.
[108] На этапе 1219, базовая станция 110 может выполнять QoS-установление класса с фиксированной задержкой и затем передавать сообщение QoS-уведомления в SMF 130b AMF/SMF 1210. Сообщение QoS-уведомления может включать в себя параметр, связанный со значением задержки при радиосвязи. Значение задержки при радиосвязи в QoS-сообщении может передаваться в терминал 120 и использоваться для QoS-установления в восходящей линии связи терминала 120.
[109] На этапе 1221, SMF 130b AMF/SMF 1210 может передавать сообщение модификации PDU-сеанса в терминал 120. Сообщение модификации PDU-сеанса может включать в себя параметры PDB, допуска по потерям и приоритета
[110] На этапе 1223, SMF 130b AMF/SMF 1210 может передавать сообщение модификации PDU-сеанса в терминал 120. Сообщение модификации PDU-сеанса может включать в себя параметр значения задержки при радиосвязи.
[111] На этапе 1225, терминал 120 может диспетчеризовать пакет восходящей линии связи с учетом значения задержки при радиосвязи сообщения модификации PDU-сеанса. Без диспетчеризации пакета восходящей линии связи на основе значения задержки при радиосвязи, терминал 120 может отбрасывать пакет восходящей линии связи, что приводит к тому, что потери последовательного пакета восходящей линии связи опускаются ниже допуска по потерям. Если потери последовательного пакета восходящей линии связи превышают допуск по потерям, терминал 120 может повторно диспетчеризовать пакет восходящей линии связи посредством увеличения приоритета. В различных вариантах осуществления, этапы 1211, 1215 и 1221 могут осуществляться независимо от порядка. Далее фиг. 13 и фиг. 14 иллюстрируют вычисление значения BH-задержки и значения задержки при радиосвязи, соответственно.
[112] Фиг. 13 иллюстрирует способ трассировки BH-задержки согласно варианту осуществления раскрытия сущности.
[113] Ссылаясь на фиг. 13, на этапе 1301, система управления TCE/OAM/Mgmt_Sys/PCF 1310 может передавать сообщение активации сеанса трассировки в SMF 130b. Сообщение активации сеанса трассировки может включать в себя информацию, указывающую UPF 130c и базовую станцию 110.
[114] На этапе 1303, SMF 130b может запрашивать трассировку BH-задержки из UPF 130c посредством передачи сообщения с запросом на измерения, указывающего базовую станцию 110, которая требуется посредством UPF 130c.
[115] На этапе 1305, UPF 130c может записывать время. Например, UPF 130c может записывать время Req_snd, в которое запрос на измерения передается из SMF 130b, в качестве T1. UPF 130c может измерять задержку с использованием сообщения пользовательской плоскости на основе протокола туннелирования по стандарту общей службы пакетной радиопередачи (GPRS) (GTP-U) с базовой станцией 110.
[116] На этапе 1307, UPF 130c может передавать GTP-U-сообщение в базовую станцию 110. Таким образом, GTP-U-сообщение, передаваемое посредством UPF 130c, может включать в себя параметр типов эхо-запросов и эхо-ответов для существующих типов GTP-U-сообщений. Эхо-запрос может передаваться посредством включения параметров команда=измерение, идентификатор=XX и Req_Snd=T1, с использованием поля частного расширения. Команда указывает цель текущего сообщения с эхо-запросом, идентификатор указывает значение для идентификации идентичной команды, и Req_Snd указывает время передачи запроса на измерения.
[117] На этапе 1309, базовая станция 110 может записывать время. Таким образом, базовая станция 110 может задавать время Req_rcv приема GTP-U-сообщения в качестве T2.
[118] На этапе 1311, базовая станция 110 может записывать время. Таким образом, базовая станция 110 может время Req_snd передачи сообщения с эхо-ответом, которое представляет собой ответное сообщение для эхо-запроса, в качестве T3.
[119] На этапе 1313, базовая станция 110 может передавать сообщение с эхо-ответом в UPF 130c. Сообщение с эхо-ответом может передаваться посредством включения параметров команда=измерение, идентификатор=XX, Req_Rcv=T2 и Rsp_Snd=T3, посредством использования поля частного расширения. Команда указывает цель текущего сообщения с эхо-ответом, и идентификатор указывает значение для идентификации идентичной команды. Идентификатор может указывать значение, идентичное значению идентификатора эхо-запроса, принимаемого ранее. Req_Rcv может указывать время приема эхо-запросов, и Rsp_Snd может указывать время передачи эхо-ответов.
[120] На этапе 1315, UPF 130c может записывать время. Таким образом, UPF 130c может задавать время Rsp_rcv приема эхо-ответов из базовой станции 110, в качестве T4.
[121] На этапе 1317, UPF 130c может вычислять значение BH-задержки с использованием записанных значений времени. Например, UPF 130c может задавать уравнение 2.
[122] BH_delay = (T2+T4-T1-T3)/2... уравнение 2
[123] В уравнении 2, BH_delay обозначает BH-задержку, T1 обозначает время передачи запроса на измерения из SMF 130b в UPF 130c, T2 обозначает время приема GTP-U-сообщения в базовой станции 110, T3 обозначает время передачи сообщения с эхо-ответом из базовой станции 110 в UPF 130c, и T4 обозначает время приема сообщения с эхо-ответом из базовой станции 110 в UPF 130c.
[124] На этапе 1319, UPF 130c может передавать ответ по измерениям в SMF 130b. Таким образом, UPF 30c может передавать вычисленное значение BH-задержки в SMF 130b. Таким образом, сообщение с ответом по измерениям, передаваемое в SMF 130b, может включать в себя информацию, связанную с UPF 130c, базовой станцией 110 и BH-задержкой.
[125] На этапе 1321, SMF 130b может сообщать трассировочную запись в систему управления TCE/OAM/Mgmt_Sys/PCF 1310.
[126] Фиг. 14 иллюстрирует способ трассировки задержки при радиосвязи согласно варианту осуществления раскрытия сущности.
[127] Ссылаясь на фиг. 14, на этапе 1401, система управления TCE/OAM/Mgmt_Sys/PCF 1420 может передавать сообщение активации сеанса трассировки в базовую станцию 110. Сообщение активации сеанса трассировки может проходить по AMF/SMF 1410 и UPF 130c
[128] На этапе 1403, базовая станция 110 может начинать сеанс трассировки и сохранять параметры для минимизации тестов в ходе вождения (MDT). Таким образом, базовая станция 110 может инициировать сеанс с соответствующим терминалом 120 и сохранять необходимые параметры.
[129] На этапе 1405, базовая станция 110 может выполнять существующую MDT с соответствующим терминалом 120. Базовая станция 110 может сохранять результат. Таким образом, могут использоваться MDT-параметры, сохраненные на этапе 1403.
[130] На этапе 1407, базовая станция 110 может сообщать трассировочную запись. Таким образом, базовая станция 110 может передавать сообщение, включающее в себя MDT-результат, в систему управления TCE/OAM/Mgmt_Sys/PCF 1420. Сообщение с отчетом по трассировочным записям может проходить по UPF 130c и AMF/SMF 1410.
[131] Фиг. 15 иллюстрирует пример процесса тактовой синхронизации мостовой модели, если вторая сетевая система представляет собой мост TSN согласно варианту осуществления раскрытия сущности.
[132] Ссылаясь на фиг. 15, вторая сетевая система может включать в себя 5GS. Таким образом, фиг. 5 иллюстрирует тактовую синхронизацию мостовой модели, если 5GS задается в качестве моста TSN. Например, терминал 120 и UPF 130c могут выполнять периодическое измерение времени задержки для линии связи, совместно используемой с соседней TSN-системой. На фиг. 15, терминал 120 может периодически измерять задержку D_Link1 1501 в линии 1 связи и сохранять ее среднее значение, и UPF 130c может периодически измерять задержку D_Link2 1505 в линии 2 связи и сохранять ее среднее значение. На фиг. 15, при передаче синхрокадра и Follow_Up-кадра в соседний второй мост 1520, 5GS, включающая в себя терминал 120, базовую станцию 110 и UPF 130c, может обновлять задержку в линии связи и R_5GS 1503, которое представляет собой время пребывания в 5GS, в поле коррекции. Таким образом, можно предположить, что задержка при радиосвязи и BH-задержка имеют фиксированные и симметричные значения посредством применения QoS-класса с фиксированной задержкой по фиг. 12. В различных вариантах осуществления, R_5GS 1503 может вычисляться посредством суммирования времени пребывания в терминале 120, базовой станции 110 и UPF 130c 5GS-области, задержки при радиосвязи и BH-задержки. Например, 5GS может идентифицировать то, что значение поля коррекции становится равным T3-T1, путем обновления задержки в линии 1 связи и R_5GS 1503 в поле коррекции синхрокадра.
[133] В различных вариантах осуществления, ведущий узел 1510 может передавать синхрокадр в терминал 120 5GS во время T1. Затем, ведущий узел 1510 может передавать Follow_Up-кадр. Таким образом, задержка D_Link1 в линии 1 связи может указывать разность времени T1, в которое ведущий узел 1510 передает синхрокадр, и времени T2, в которое терминал 120 принимает синхрокадр. Временная метка может задаваться равной T1, и поле коррекции может задаваться равным 0. UPF 130c может передавать синхрокадр во второй мост 1520 во время T3. Второй мост 1520 может принимать синхрокадр в T4. Затем, UPF 130c может передавать Follow_Up-кадр. В это время, разность T2 и T3 может указывать R_5GS 1503. Разность T3 и T4 может указывать задержку D_Link2 в линии 2 связи, при этом временная метка может задаваться равной T1, и поле коррекции может задаваться равным T3-T1. Второй мост 1520 может передавать синхрокадр в ведомый узел 1530 в T5. Ведомый узел 1530 может принимать синхрокадр в T6. Разность T4 и T5 может указывать время R_Bridge2 1507 пребывания второго моста 1520. Затем, второй мост 1520 может передавать Follow_Up-кадр. Таким образом, разность T5 и F6 может указывать задержку D_Link3 1509 в линии 3 связи, при этом временная метка может задаваться равной T1, и поле коррекции может задаваться равным (T3-T1)+(T5-T3).
[134] Фиг. 16 иллюстрирует способ тактовой синхронизации с использованием восходящей линии связи (UL) сети, поддерживающей первую сетевую систему, и сети на основе мостовой модели согласно варианту осуществления раскрытия сущности.
[135] Ссылаясь на фиг. 16, первая сетевая система может включать в себя IEEE 802.1AS. Таким образом, фиг. 16 иллюстрирует тактовую синхронизацию с использованием UL сети, поддерживающей IEEE 802.1AS, и 3GPP-сети на основе мостовой модели. На фиг. 16, R_UE может обозначать время пребывания в терминале 120, R_UPF может обозначать время пребывания в UPF 130c, и R_TSN может обозначать время пребывания в TSN SW 1620. D_Air может обозначать задержку при радиосвязи между терминалом 120 и базовой станцией 110, и D_BH может обозначать BH-задержку между базовой станцией 110 и UPF 130c. Задержка при радиосвязи может предварительно сохраняться в базовой станции 110. BH-задержка может предварительно сохраняться в UPF 130c. Ведущий узел 1610 может передавать синхрокадр в терминал 120 во время T1 1601 и затем передавать Follow_Up-кадр. В это время, временная метка может задаваться равной T1, и поле коррекции может задаваться равным 0. Чтобы вычислять R_5GS, UPF 130c должна принимать значение задержки при радиосвязи, R_UE и R_gNB. Соответственно, терминал 120 может передавать по протоколу уровня приложений для адаптации данных по услугам (SDAP), включающему в себя D_Link1 и R_UE, в базовую станцию 110. Базовая станция 110 может заново задавать GTP-U-заголовок и передавать значение D_Link1+R_UE+AIR_DELAY+R_gNB в UPF 130c. UPF 130c, которая сохраняет значение BH-задержки, может вычислять R_UPF. Таким образом UPF 130c может вычислять R_5GS=R_UE+AIR_DELAY+R_gNB+BH_DELAY+R_UPF и применять вычисленное результирующее значение для поля коррекции Follow_Up-кадра синхрокадра. Поле коррекции может вычисляться путем суммирования задержки D_Link1 в линии 1 связи, которая представляет собой входную линию связи 5GS, и времени пребывания кадра R_5GS в 5GS со значением, передаваемым из соседней TSN-системы. Поскольку значение коррекции, передаваемое из соседней TSN-системы, равно 0 на фиг. 16, конечное значение поля коррекции может составлять D_Link1+R_5GS. В частности, UPF 130c может передавать синхрокадр и Follow_Up-кадр в TSN SW 1620, при этом временная метка может задаваться равной T1, и поле коррекции может задаваться равным R_5GS+D_Link1. TSN SW 1620 может передавать синхрокадр и Follow_Up-кадр в ведомый узел 1630. Ведомый узел 1630 может принимать синхрокадр из TSN SW 1620 во время T2 1603, при этом временная метка может задаваться равной T1, и поле коррекции может задаваться равным D_Link2+R_TSN+R_5GS+D_Link1.
[136] Фиг. 17 иллюстрирует способ тактовой синхронизации с использованием нисходящих линий связи (DL) сети, поддерживающей первую сетевую систему, и сети на основе мостовой модели согласно варианту осуществления раскрытия сущности.
[137] Ссылаясь на фиг. 17, первая сетевая система может включать в себя IEEE 802.1AS. Таким образом, фиг. 17 иллюстрирует тактовую синхронизацию с использованием DL сети, поддерживающей IEEE 802.1AS, и 3GPP-сети на основе мостовой модели. На фиг. 17, R_UE может обозначать время пребывания в терминале 120, R_UPF может обозначать время пребывания в UPF 130c, и R_TSN может обозначать время пребывания в TSN SW 1720. D_Air может обозначать задержку при радиосвязи между терминалом 120 и базовой станцией 110, и D_BH может обозначать BH-задержку между базовой станцией 110 и UPF 130c. Задержка при радиосвязи может предварительно сохраняться в базовой станции 110. BH-задержка может предварительно сохраняться в UPF 130c. Ведущий узел 1730 может передавать синхрокадр в TSN SW 1720 во время T3 1701 и затем передавать Follow_Up-кадр. В это время, временная метка может задаваться равной T3, и поле коррекции может задаваться равным 0. Чтобы вычислять R_5GS, терминал 120 должен принимать время R_RAN пребывания в RAN и время R_CN пребывания в базовой сети, при этом R_RAN=D_Air+R_gNB и R_CN=D_BH+R_UPF. UPF 130c может заново задавать GTP-U-заголовок и передавать R_CN и D_Link2 в базовую станцию 110. При этом, поскольку QoS-класс с фиксированной задержкой применяется, он может указывать D_BH=BH_DELAY. Помимо этого, базовая станция 110 может передавать значение D_Link2+R_CN+R_RAN в терминал 120 с использованием SDAP. Поскольку QoS-класс с фиксированной задержкой применяется, он может указывать D_Air=AIR_DELAY. Терминал 120 может вычислять время пребывания кадра в терминале R_UE. Терминал 120 может вычислять R_5GS с использованием R_5GS=R_UE+R_RAN+R_CN и применять для поля коррекции Follow_Up-кадра синхрокадра. На фиг. 17, поскольку значение поля коррекции, передаваемое из существующей TSN-системы, составляет D_Link3+R_TSN, конечное значение поля коррекции может составлять D_Link3+R_TSN+D_Link2+R_5GS. В частности, TSN SW 1720 может передавать синхрокадр и Follow_Up-кадр, принимаемые из ведущего узла 1730, в UPF 130c, при этом временная метка может задаваться равной T3, и поле коррекции может задаваться равным D_Link3+R_TSN. UPF 130c может передавать синхрокадр и Follow_Up-кадр в терминал 120 через базовую станцию 110. Ведомый узел 1710 может принимать синхрокадр и Follow_Up-кадр из терминала 120 во время T4 1703, при этом временная метка может задаваться равной T3, и поле коррекции может задаваться равным D_Link3+R_TSN+D_Link2+R_5GS.
[138] Фиг. 18 иллюстрирует способ тактовой синхронизации с использованием DL сети, поддерживающей первую сетевую систему, и сети на основе интегрированной модели согласно варианту осуществления раскрытия сущности.
[139] Ссылаясь на фиг. 18, первая сетевая система может включать в себя IEEE 802.1AS. Таким образом, фиг. 18 иллюстрирует тактовую синхронизацию с использованием DL сети, поддерживающей IEEE 802.1AS, и 3GPP-сети на основе интегрированной модели.. В этом варианте осуществления, можно предположить, что QoS-установление класса с фиксированной задержкой уже заканчивается. В варианте осуществления по фиг. 18, терминал 120, базовая станция 110 и UPF 130c могут синхронизироваться с TSN-системой. Терминал 120 и базовая станция 110 могут синхронизироваться через совмещение радиоинтерфейсных кадров. Значение задержки на распространение по радиоинтерфейсу может определяться как минимальное значение из трассировочных значений, которые инициируются из базовой станции 110 в терминал 120. Временная метка может передаваться через уровень управления доступом к среде (MAC)/физический уровень (PHY) согласно конфигурации главного ведущего узла, из терминала 120 в базовую станцию 110 или из базовой станции 110 в терминал 120. В интегрированной модели, терминал 120, базовая станция 110 и UPF 130c 3GPP 5GS могут участвовать в TSN-системе, и каждое из означенного может представлять собой мост или конечную станцию. В различных вариантах осуществления, конечная станция может указывать узел, который служит в качестве ведущего узла или ведомого узла. Поскольку соседняя TSN-система соединяется по проводам, линия радиосвязи между терминалом 120 и базовой станцией 110 может не соединяться по проводам на фиг. 18. Таким образом, TSN-область может разбиваться на две, чтобы поддерживать тактовую синхронизацию. Таким образом, каждая область может требовать главного ведущего узла. Помимо этого, базовая станция 110 и терминал 120 должны доставлять трафик 5G NR и синхронизироваться, с тем чтобы распознавать радиоинтерфейсный кадр. Таким образом, базовая станция 110 и терминал 120 могут синхронизироваться с использованием способа, отличного от TSN-способа. В данном документе, поскольку точность может увеличиваться только в том случае, если конкретное время задержки существует при транспортировке трафика между базовой станцией 110 и терминалом 120, можно предположить, что QoS-класс с фиксированной задержкой применяется в этом варианте осуществления. Такая тактовая синхронизация, которая не представляет собой синхронизацию с использованием синхро- и Follow_Up-Ethernet-кадров, может обрабатываться в качестве двух разбитых областей в силу TSN. В общем, поскольку терминал синхронизируется с широковещательным сигналом базовой станции, синхросигнал одной области может доставляться в терминал 120 другой области. В этом случае, тактовая синхронизация между двумя областями может достигаться посредством работы базовой станции 110 в качестве ведомого узла в своей соответствующей области и работы терминала 120 в качестве главного ведущего узла в своей соответствующей области. В частности, первая TSN-область 1800 может включать в себя терминал 120, ведомый узел 1802 и первый мост 1804. Вторая TSN-область 1850 может включать в себя базовую станцию 110, UPF 130c, ведущий узел 1852, второй мост 1854, третий мост 1856, четвертый мост 1858, пятый мост 1860 и шестой мост 1862. В этом случае, главный ведущий узел первой TSN-области 1800 может задаваться в качестве терминала 120, главный ведущий узел второй TSN-области 1850 может задаваться в качестве ведущего узла 1852, и ведомый узел второй TSN-области 1850 может задаваться в качестве базовой станции 110. Во взаимосвязи первой TSN-области 1800 и второй TSN-области 1850, базовая станция 110 может задаваться в качестве ведущего узла, и терминал 120 может задаваться в качестве ведомого узла.
[140] Фиг. 19 иллюстрирует пример тактовой синхронизации с использованием DL сети, поддерживающей первую сетевую систему, и сети на основе интегрированной модели согласно варианту осуществления раскрытия сущности.
[141] Ссылаясь на фиг. 19, первая сетевая система может включать в себя IEEE 802.1AS. Таким образом, фиг. 19 иллюстрирует тактовую синхронизацию с использованием DL сети, поддерживающей IEEE 802.1AS, и 3GPP-сети на основе интегрированной модели.. В этом варианте осуществления, можно предположить, что QoS-установление класса с фиксированной задержкой уже заканчивается. Можно предположить, что время пребывания вычисляется посредством терминала 120 или UPF 130c. Можно предположить, что значение задержки при радиосвязи является фиксированным заранее или фиксированным посредством QoS-установления. Синхросигнал базовой станции 110 должен доставляться в терминал 120. Время T6 1903 приема синхрокадров базовой станции 110 может корректироваться посредством радио-TSN на основе времени T5 1901 передачи синхрокадров главного ведущего узла на основе уравнения 3
[142] T6=D_Link3+R_Bridge5+D_Link5+R_Bridge6+D_Link4+T5... уравнение 3
[143] В уравнении 3, T6 обозначает время, в которое базовая станция 110 принимает синхрокадр из пятого моста 1950, D_Link3 обозначает время задержки линии 3 связи между ведущим узлом 1940 и пятым мостом 1950, R_Bridge5 обозначает время пребывания в пятом мосту 1950, D_Link5 обозначает время задержки линии 5 связи между пятым мостом 1950 и шестым мостом 1960, R_Bridge6 обозначает время пребывания в шестом мосту 1960, D_Link4 обозначает время задержки линии 4 связи между базовой станцией 110 и шестым мостом 1960, и T5 обозначает время, в которое ведущий узел 1940 передает синхрокадр. Базовая станция 110 может передавать SDAP и MAC-кадр, включающий в себя время T_DL' пакетной DL-передачи, в терминал 120 на основе скорректированного времени. Посредством коррекции AIR_DELAY задержки при радиосвязи, терминал 120 может синхронизировать свой синхросигнал с главным ведущим узлом второй TSN-области 1920 базовой станции 110. Таким образом, главный ведущий узел второй TSN-области 1920 может указывать ведущий узел 1940. Терминал 120 может использовать управляющее сообщение, такое как управляющий кадр для MAC и управляющее DCI-сообщение для PHY, для синхронизации при радиосвязи Терминал 120 может служить в качестве главного ведущего узла в своей области (к примеру, в первой TSN-области 1910), при этом другие TSN-системы соответствующей области (к примеру, первой TSN-области 1910) могут подвергаться тактовой синхронизации с терминалом 120. Главный ведущий узел во второй TSN-области 1920 может указывать ведущий узел 1940, и ведомый узел может указывать базовую станцию 110. В частности, во время T5 1901, ведущий узел 1940 может передавать синхрокадр и Follow_Up-кадр в пятый мост 1950, при этом временная метка может задаваться равной T5, и поле коррекции может задаваться равным 0. Если пятый мост 1950 передает синхрокадр и Follow_Up-кадр, при этом временная метка может задаваться равной T5, и поле коррекции может задаваться равным D_Link3+R_Bridge5. Если базовая станция 110 передает синхрокадр во время T6 1903 и затем принимает Follow_Up-кадр, временная метка может задаваться равной T5, и поле коррекции может задаваться равным D_Link3+R_Bridge5+D_Link5+R_Bridge6. Терминал 120 может принимать синхрокадр во время T7 1905. Если ведомый узел 1930 принимает синхрокадр из терминала 120 во время T8 1907, временная метка может задаваться равной T7, и поле коррекции может задаваться равным 0.
[144] Оборудование и способ согласно различным вариантам осуществления раскрытия сущности позволяют достигать синхронизации с использованием сети беспроводной связи.
[145] Помимо этого, оборудование и способ согласно различным вариантам осуществления раскрытия сущности могут использовать сеть беспроводной связи в варианте применения, требующем тактовой синхронизации между узлами, таком как автоматизация работы предприятия.
[146] Способы согласно вариантам осуществления, указанным в формуле изобретения и/или в подробном описании раскрытия сущности, могут реализовываться в аппаратных средствах, программном обеспечении либо в комбинации аппаратных средств и программного обеспечения.
[147] Когда способы реализуются посредством программного обеспечения, может предоставляться машиночитаемый носитель хранения данных для сохранения одной или более программ (программных модулей). Одна или более программ, сохраненных на машиночитаемом носителе хранения данных, могут быть выполнены с возможностью выполнения посредством одного или более процессоров в электронном устройстве. По меньшей мере, одна программа может включать в себя инструкции, которые инструктируют электронному устройству осуществлять способы согласно различным вариантам осуществления раскрытия сущности, заданным посредством прилагаемой формулы изобретения и/или раскрытым в данном документе.
[148] Программы (программные модули или программное обеспечение) могут сохраняться в энергонезависимых запоминающих устройствах, включающих в себя оперативное запоминающее устройство и флэш-память, постоянное запоминающее устройство (ROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), устройство хранения данных на магнитных дисках, ROM на компакт-дисках (CD-ROM), универсальные цифровые диски (DVD) либо оптические устройства хранения данных другого типа или магнитную кассету. Альтернативно, любая комбинация части или всех из них может формировать запоминающее устройство, в котором сохраняется программа. Дополнительно, множество таких запоминающих устройств могут быть включены в электронное устройство.
[149] Помимо этого, программы могут сохраняться в присоединяемом устройстве хранения данных, которое является доступным через сети связи, к примеру, через Интернет, сеть intranet, локальную вычислительную сеть (LAN), глобальную вычислительную сеть (WAN) и сеть хранения данных (SAN) либо комбинацию вышеозначенного. Такое устройство хранения данных может осуществлять доступ к электронному устройству через внешний порт. Дополнительно, отдельное устройство хранения данных в сети связи может осуществлять доступ к портативному электронному устройству.
[150] В вышеописанных подробных вариантах осуществления раскрытия сущности, компонент, включенный в раскрытие сущности, выражается в единственном или множественном числе согласно представленному подробному варианту осуществления. Тем не менее, форма единственного числа или форма множественного числа выбирается для удобства описания в соответствии с представленной ситуацией, и различные варианты осуществления раскрытия сущности не ограничены одним элементом или несколькими элементами означенного. Дополнительно, либо несколько элементов, выражаемых в описании, могут быть сконфигурированы как один элемент, либо один элемент в описании может быть сконфигурирован как несколько элементов. Время приема может называться "входным временем". Время передачи называется "выходным временем".
[151] Хотя раскрытие сущности показано и описано со ссылкой на его различные варианты осуществления, специалисты в данной области техники должны понимать, что различные изменения по форме и содержанию могут вноситься без отступления от сущности и объема раскрытия сущности, заданного посредством прилагаемой формулы изобретения и ее эквивалентов.
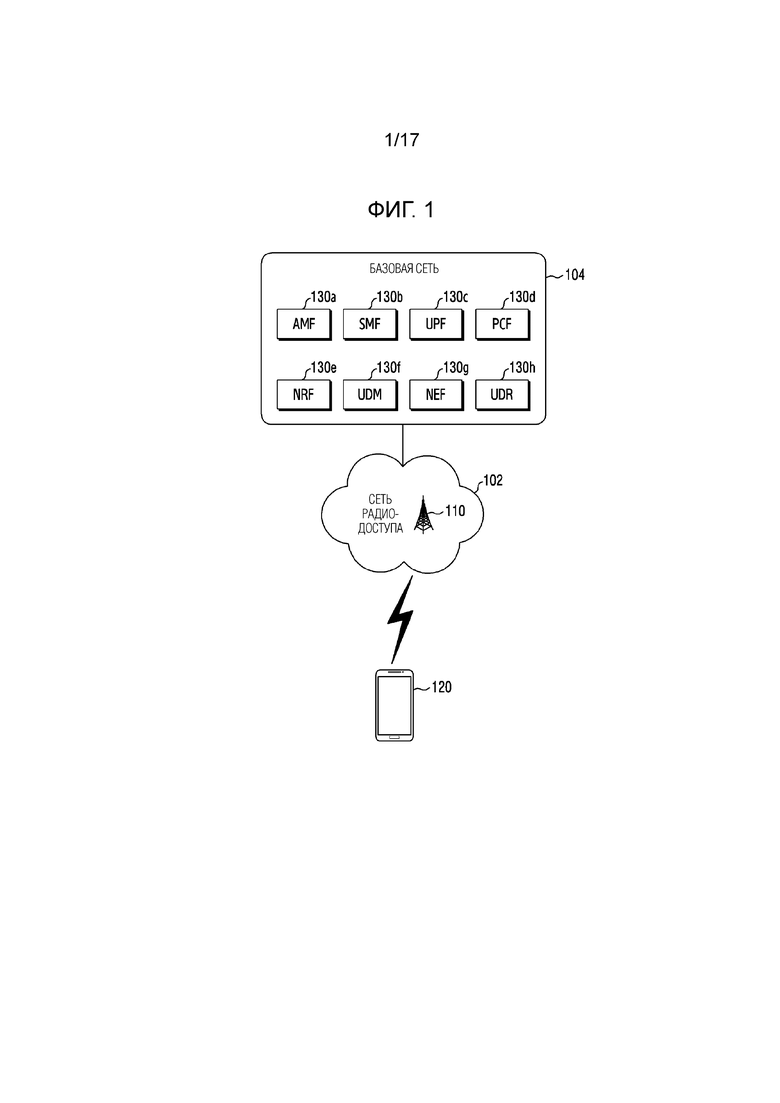
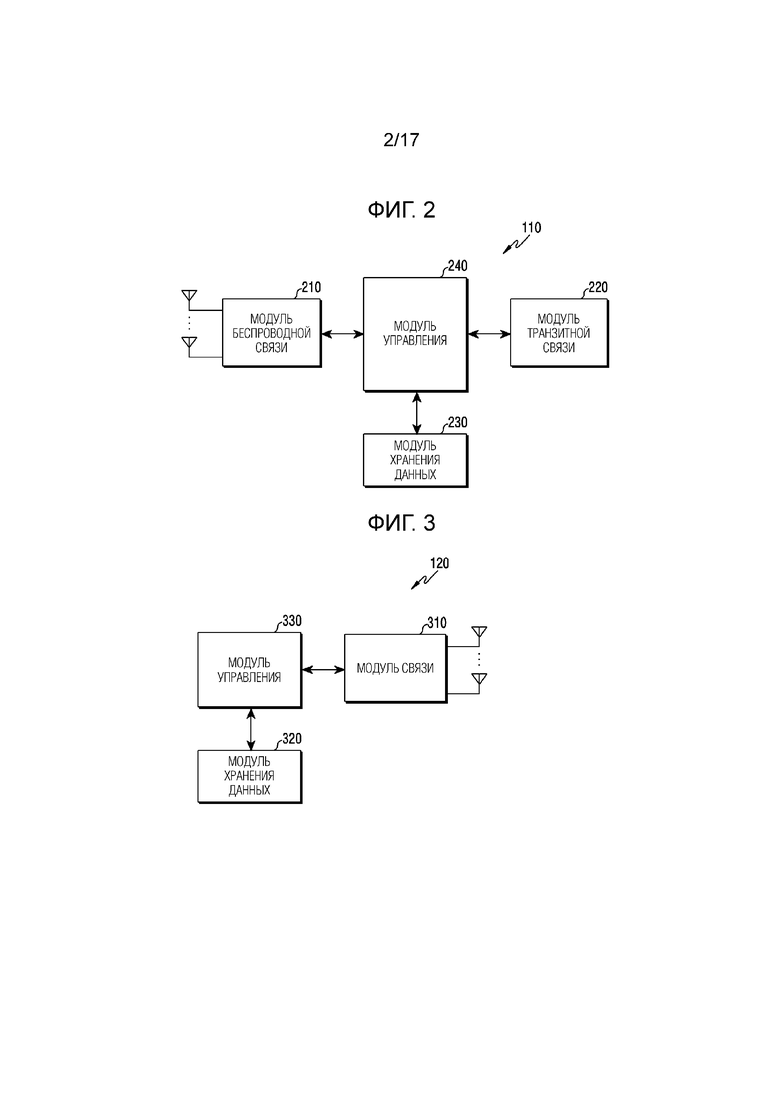


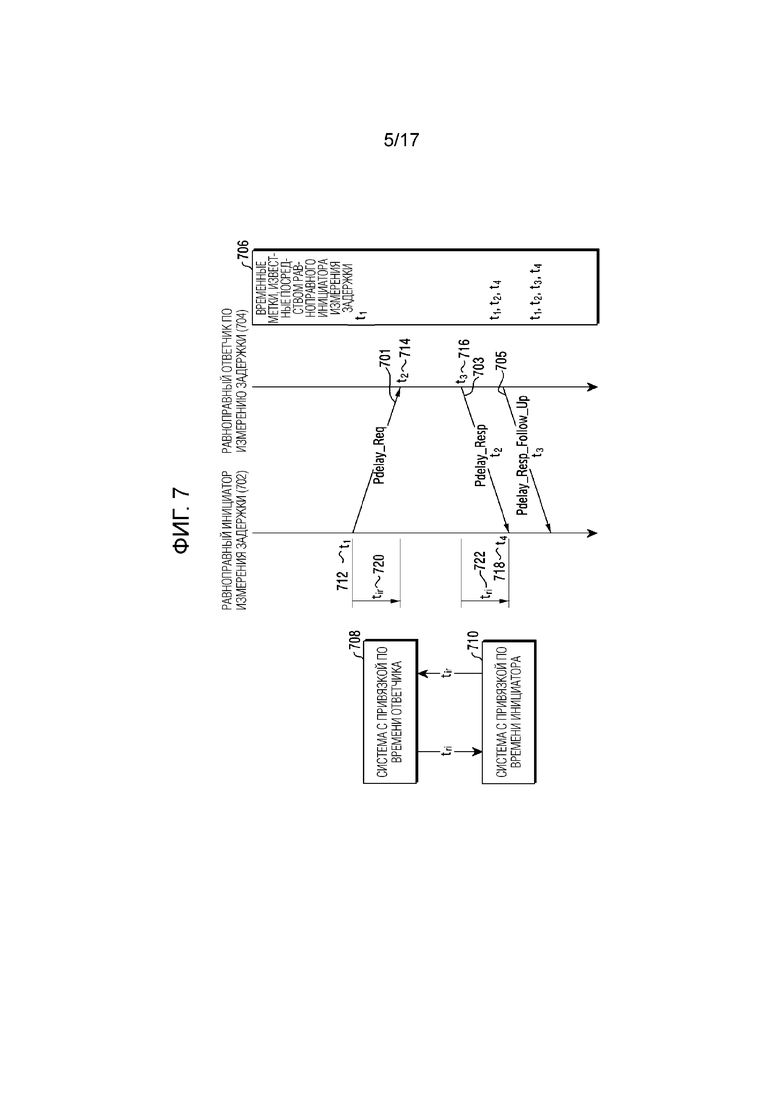

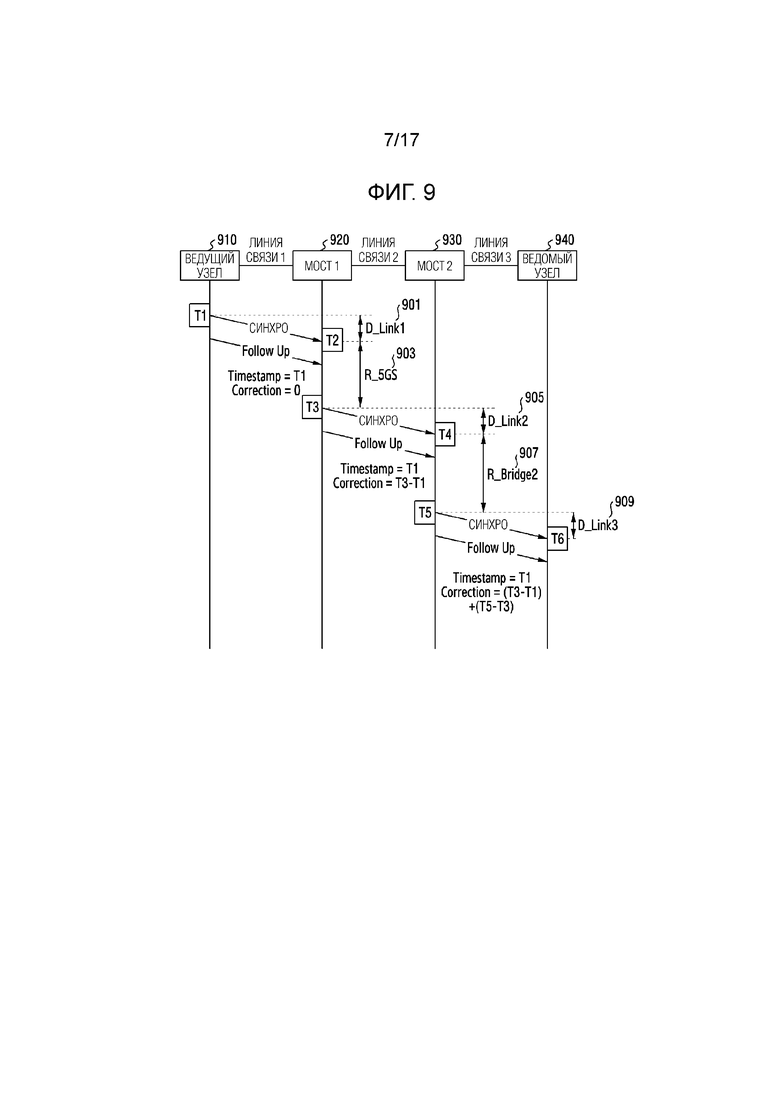

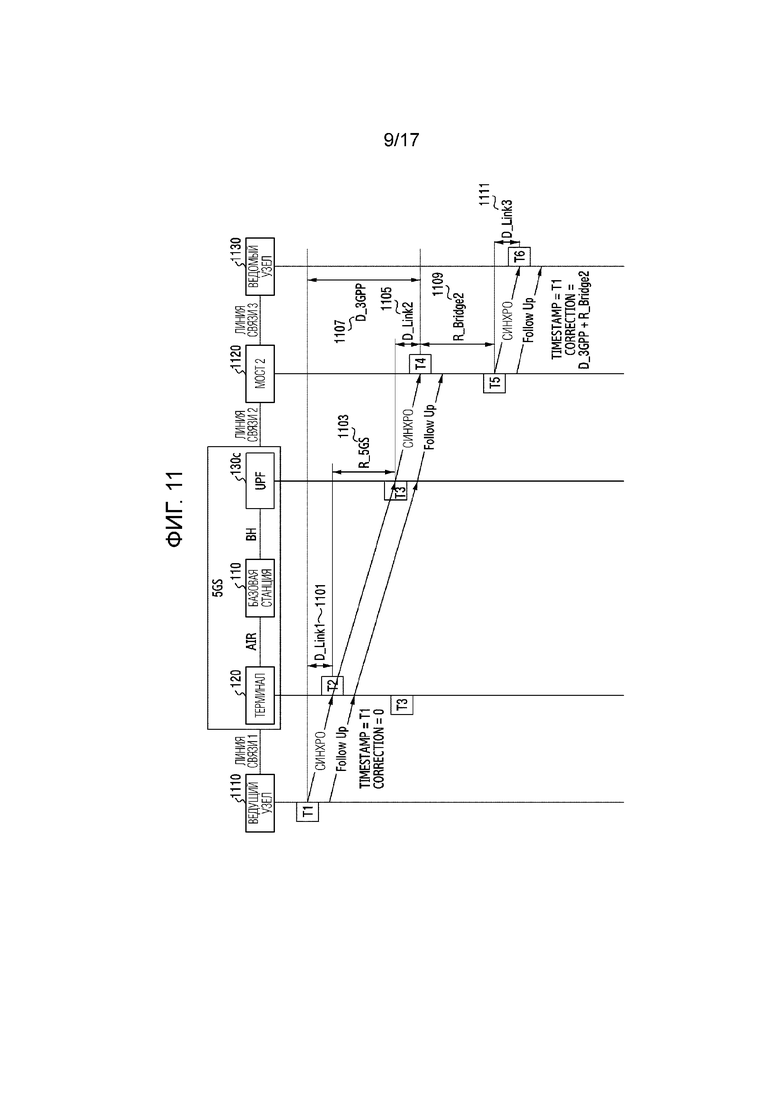
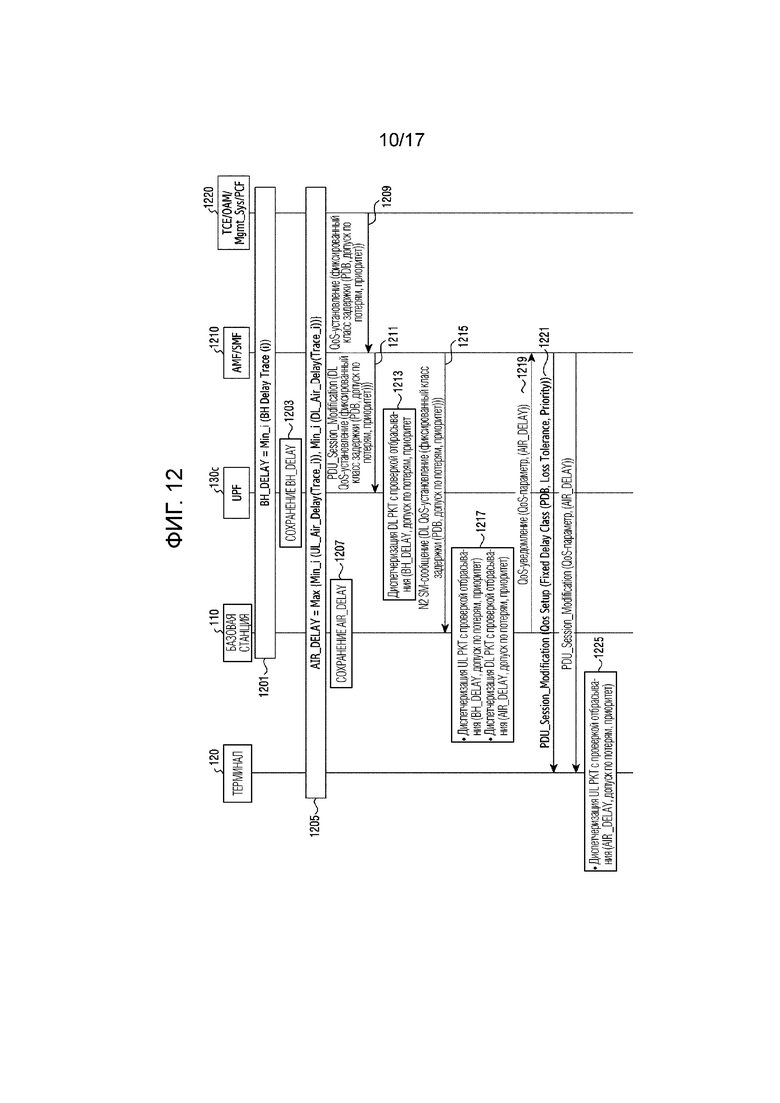

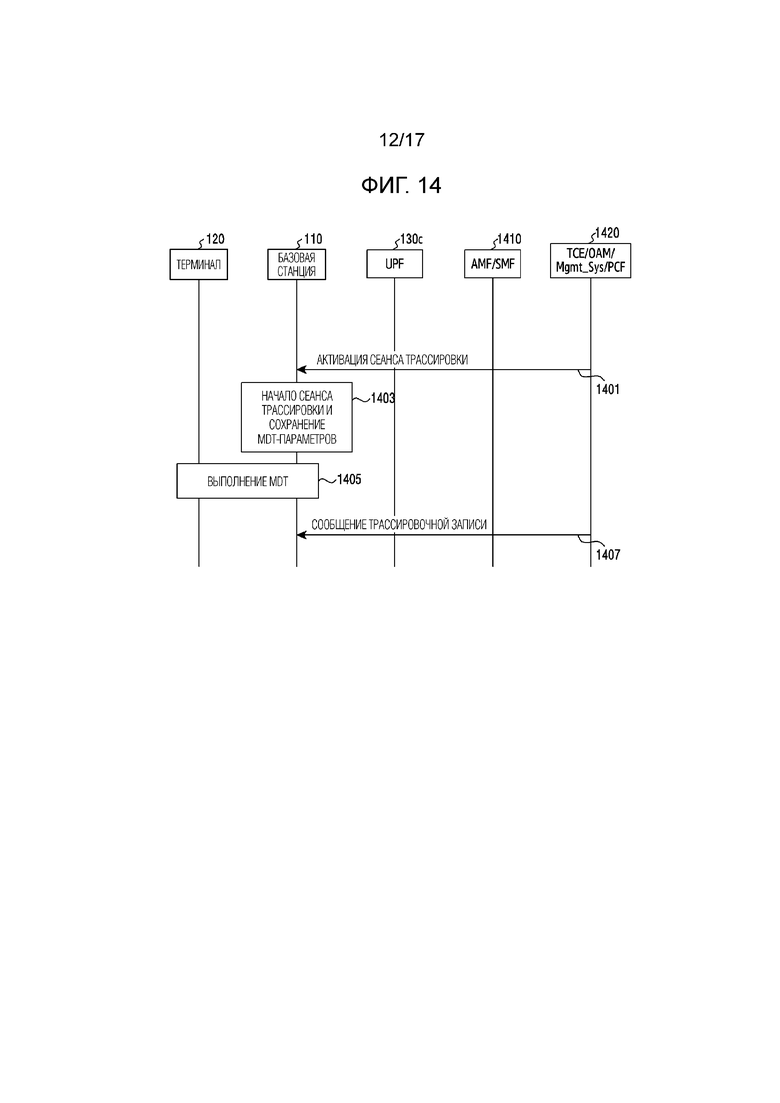
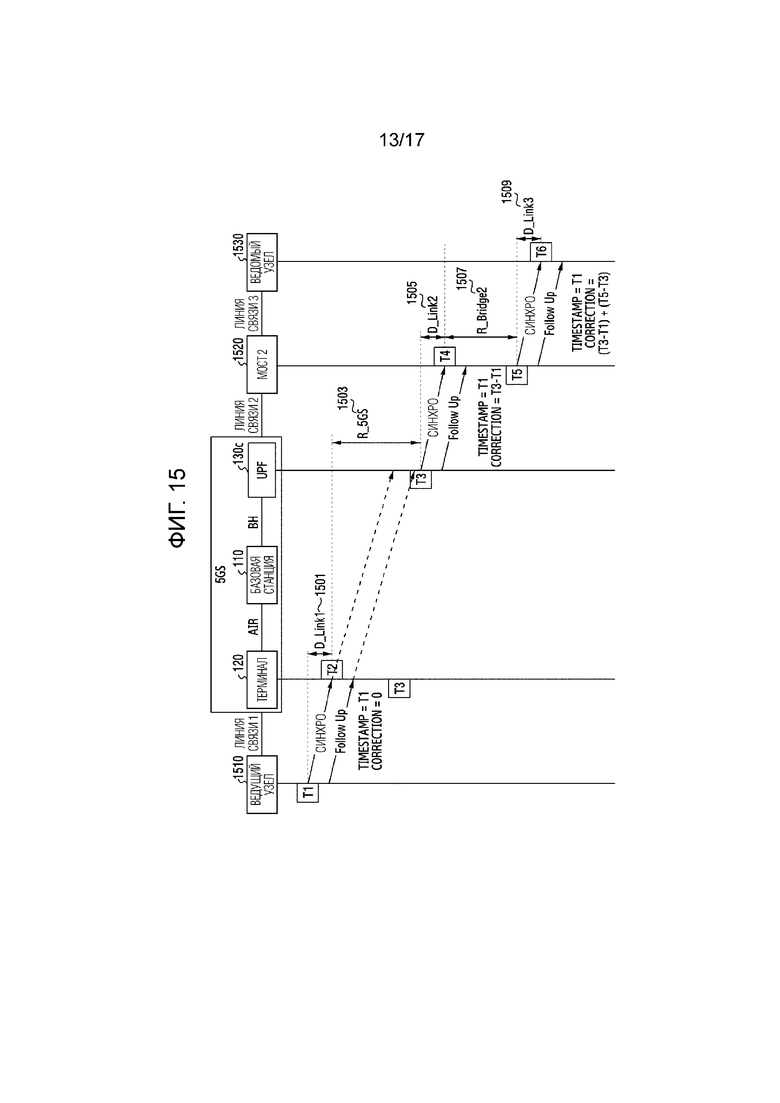




Изобретение относится к средствам для диспетчеризации пакетов. Технический результат - обеспечение тактовой синхронизации между терминалами за счет взаимодействия чувствительной ко времени сети и поддерживаемой проводной сети посредством сети беспроводной связи. Принимают, от функции управления сеансами (SMF), сообщение, включающее в себя по меньшей мере один параметр качества обслуживания (QoS), связанный с чувствительной ко времени сети (TSN). Диспетчеризуют пакет на основе сообщения, при этом по меньшей мере один параметр QoS включает в себя параметр допуска по потерям, и при этом параметр допуска по потерям связан с максимальным количеством потерь последовательных пакетов. 2 н. и 12 з.п. ф-лы, 19 ил. 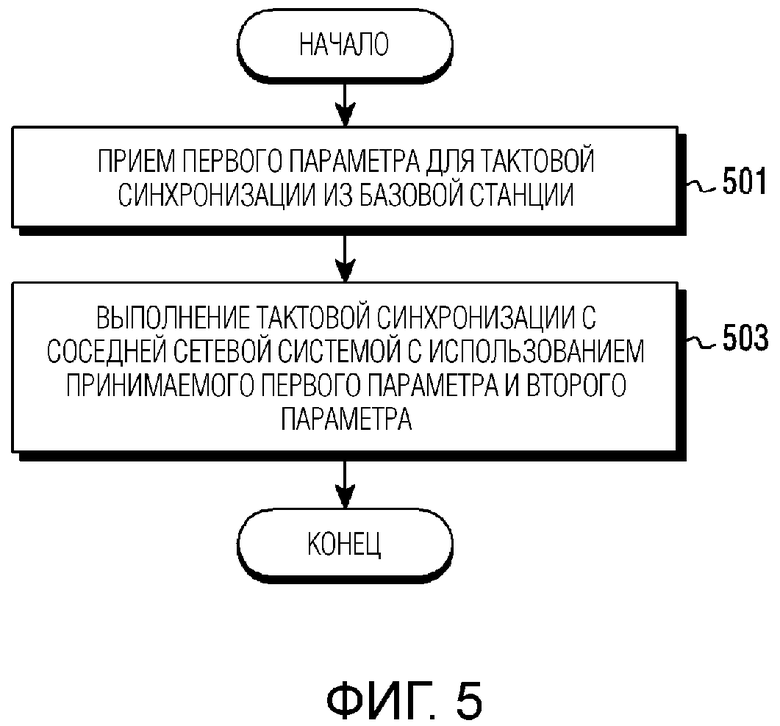
1. Способ, выполняемый базовой станцией, в системе беспроводной связи, для диспетчеризации пакетов, при этом способ содержит этапы, на которых:
принимают, от функции управления сеансами (SMF), сообщение, включающее в себя по меньшей мере один параметр качества обслуживания (QoS), связанный с чувствительной ко времени сети (TSN); и
диспетчеризуют пакет на основе сообщения,
при этом по меньшей мере один параметр QoS включает в себя параметр допуска по потерям, и
при этом параметр допуска по потерям связан с максимальным количеством потерь последовательных пакетов.
2. Способ по п. 1, в котором диспетчеризация пакета на основе сообщения содержит этапы, на которых:
вычисляют время пребывания пакета на основе предварительно сохраненного значения времени задержки; и
диспетчеризуют на основе приоритета пакета.
3. Способ по п. 1, в котором диспетчеризация пакета на основе сообщения содержит, на основе идентификации того, что диспетчеризация не может быть выполнена в течение предварительно сохраненного значения времени задержки, этап, на котором отбрасывают пакет.
4. Способ по п. 1, в котором диспетчеризация пакета на основе сообщения содержит этапы, на которых:
на основе идентификации того, что потери последовательных пакетов нисходящей линии связи превышают допуск по потерям; и
повторно диспетчеризуют пакет.
5. Способ по п. 1,
в котором диспетчеризация выполняется на основе предварительно сохраненного значения времени задержки,
в котором предварительно сохраненное значение времени задержки включает в себя значение времени задержки в транзитном соединении, и
при этом значение времени задержки в транзитном соединении включает в себя целевое значение времени задержки, с минимальным значением из значений, измеренных через трассировку задержки в транзитном соединении.
6. Способ по п. 1,
в котором по меньшей мере один параметр QoS принимается от SMF посредством функции управления доступом и мобильностью (AMF) на основе процедуры модификации сеанса на основе протокольных единиц данных (PDU), и
при этом по меньшей мере один параметр QoS включен в N2 информацию модификации сеанса (SM).
7. Способ по п. 1, в котором параметр допуска по потерям обеспечивается функцией политики и управления (PCF).
8. Базовая станция в системе беспроводной связи для диспетчеризации пакетов, при этом базовая станция содержит:
приемопередающее устройство; и
по меньшей мере один процессор, функционально соединенный с приемопередающим устройством и выполненный с возможностью:
принимать, от функции управления сеансами (SMF), сообщение, включающее в себя по меньшей мере один параметр качества обслуживания (QoS), связанный с чувствительной ко времени сети (TSN), и
диспетчеризовать пакет на основе сообщения,
при этом по меньшей мере один параметр QoS включает в себя параметр допуска по потерям, и
при этом параметр допуска по потерям связан с максимальным количеством потерь последовательных пакетов.
9. Базовая станция по п. 8, в которой по меньшей мере один процессор, дополнительно выполнен для диспетчеризации пакетов с возможностью:
- вычислять время пребывания пакета на основе предварительно сохраненного значения времени задержки; и
- диспетчеризовать на основе приоритета пакета.
10. Базовая станция по п. 8, в которой по меньшей мере один процессор дополнительно выполнен для диспетчеризации пакетов с возможностью:
на основе идентификации того, что диспетчеризация не может быть выполнена в течение предварительно сохраненного значения времени задержки, отбрасывать пакет.
11. Базовая станция по п. 8, в которой по меньшей мере один процессор выполнен для диспетчеризации пакетов с возможностью:
на основе идентификации того, что потери последовательных пакетов нисходящей линии связи превышают допуск по потерям; и
повторно диспетчеризовать пакет.
12. Базовая станция по п. 8,
в которой диспетчеризация выполняется на основе предварительно сохраненного значения времени задержки,
при этом предварительно сохраненное значение времени задержки включает в себя значение времени задержки в транзитном соединении, и
при этом значение времени задержки в транзитном соединении включает в себя целевое значение времени задержки с минимальным значением из значений, измеренных через трассировку задержки в транзитном соединении.
13. Базовая станция по п. 8,
в которой по меньшей мере один параметр QoS принимается от SMF посредством функции управления доступом и мобильностью (AMF) на основе процедуры модификации сеанса на основе протокольных единиц данных (PDU), и
при этом по меньшей мере один параметр QoS включен в N2 информацию модификации сеанса (SM).
14. Базовая станция по п. 8, в которой параметр допуска по потерям обеспечивается функцией политики и управления (PCF).
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ДЕТЕРМИНИСТИЧЕСКОЕ ПОВЕДЕНИЕ UE ДЛЯ СООБЩЕНИЯ CSI/SRS ВО ВРЕМЯ DRX | 2013 |
|
RU2636581C2 |

