Область техники
Настоящее изобретение относится к офтальмологии и, более конкретно, к лечению нарушения зрения, вызванного состоянием, в котором глаза больного не совмещены должным образом так, что пристальный взгляд каждого глаза не направлен в одну точку в пространстве, таким образом, препятствуя соответствующему бинокулярному зрению.
Более конкретно, настоящее изобретение относится к способу и системе для лечения нарушения зрения, связанного с патологиями дополнительных глазных мышц или с другими проблемами, вызывающими явление, известное как диплопия (двойное видение). Одна из патологий, вызывающих диплопию, известна как косоглазие. Однако следует понимать, что настоящее изобретение не ограничено только лечением косоглазия и также может быть использовано для лечения других видов нарушения зрения, связанного с диплопией. Кроме того, следует понимать, что настоящее изобретение может быть использовано не только для лечебно-оздоровительного ухода, как такового, но также и для тренировки и/или восстановления людей, страдающих от нарушения зрения.
Уровень техники
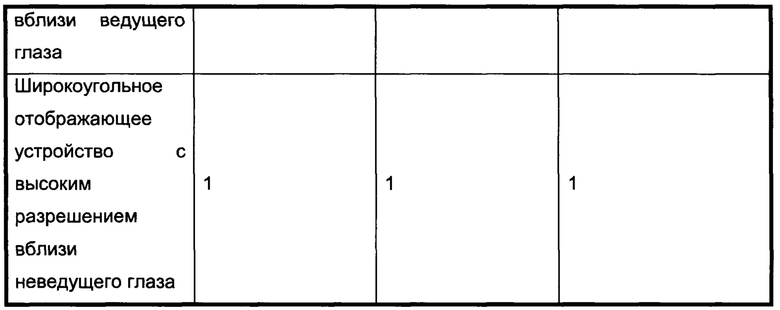
Нормальный человек имеет горизонтальное поле обзора (ПО), составляющее при неподвижной голове и глазах приблизительно 160° одним глазом и приблизительно 190° двумя глазами. Это схематично изображено на фиг. 1. Вертикальное ПО составляет приблизительно 50° вверх и 80° вниз.
На фиг. 2 показана бинокулярная горизонтальная область, видимая обоими глазами одновременно. Данная область ограничена углом приблизительно 130°, и она ответственная за восприятие глубины.
Нормальное состояние, в котором человеческие глаза пристально смотрят на объект, является довольно сложным. Движениями глаз управляют шесть дополнительных глазных мышц. Обоими глазами согласовано должны быть выполнены различные движения для обеспечения надлежащей фиксации и восприятия глубины. Главные движения представляют собой следующие:
Прерывистое движение и плавное преследование
Быстрые скачкообразные микродвижения глаз
Вергентные движения глазных яблок
В приведенном ниже описании такие движения объяснены более подробно.
Прерывистые движения обеспечивают человеку возможность смотреть на необходимый объект. Пристальное всматривание состоит из движений глаз и поворота глаз в соответствующее направление пристального взгляда.
Согласно фиг. 3 быстрые скачкообразные горизонтальные движения глаз неподвижной головы могут иметь амплитуду в общей сложности до 130° (75° в направлении височной области и 55° в направлении носа), но в нормальных условиях быстрые скачкообразные движения глаз намного меньше, и любое изменение направления пристального взгляда больше, чем приблизительно 20° сопровождаются движением головы. В течение таких быстрых скачкообразных движений пристального взгляда, сначала глаз создает скачкообразное движение для устремления пристального взгляда на цели, тогда как голова движется более медленно, и глаза откатываются назад для удержания пристального взгляда на цели.
Для амплитуды быстрого прерывистого движения глаза, составляющей приблизительно до 60°, скорость быстрого прерывистого движения линейно зависит от амплитуды (так называемая «главная последовательность прерывистого движения»). Например, 10°-ая амплитуда связана со скоростью 300°/сек, и 30° амплитуда связана с 500°/сек. При быстрых прерывистых движениях, больших, чем 60°, пиковая скорость превращается в пологий участок (нелинейно) по направлению к максимальной скорости, достижимой глазом.
Движения глаза при плавном преследовании обеспечивают глазу возможность точно следовать за движущимся объектом.
Мельчайшие быстрые прерывистые движения глаза представляют собой своего рода фиксацию, крошечные и быстрые движения глаза, имеющие обычно амплитуды до 2°. Такие движения представляют собой маленькие толчкообразные непроизвольные движения глаза, подобные миниатюрным версиям произвольных быстрых движений глаза. Роль мельчайших быстрых прерывистых движений глаза в визуальном восприятии была очень обсужденной темой, которая по-прежнему неразрешима.
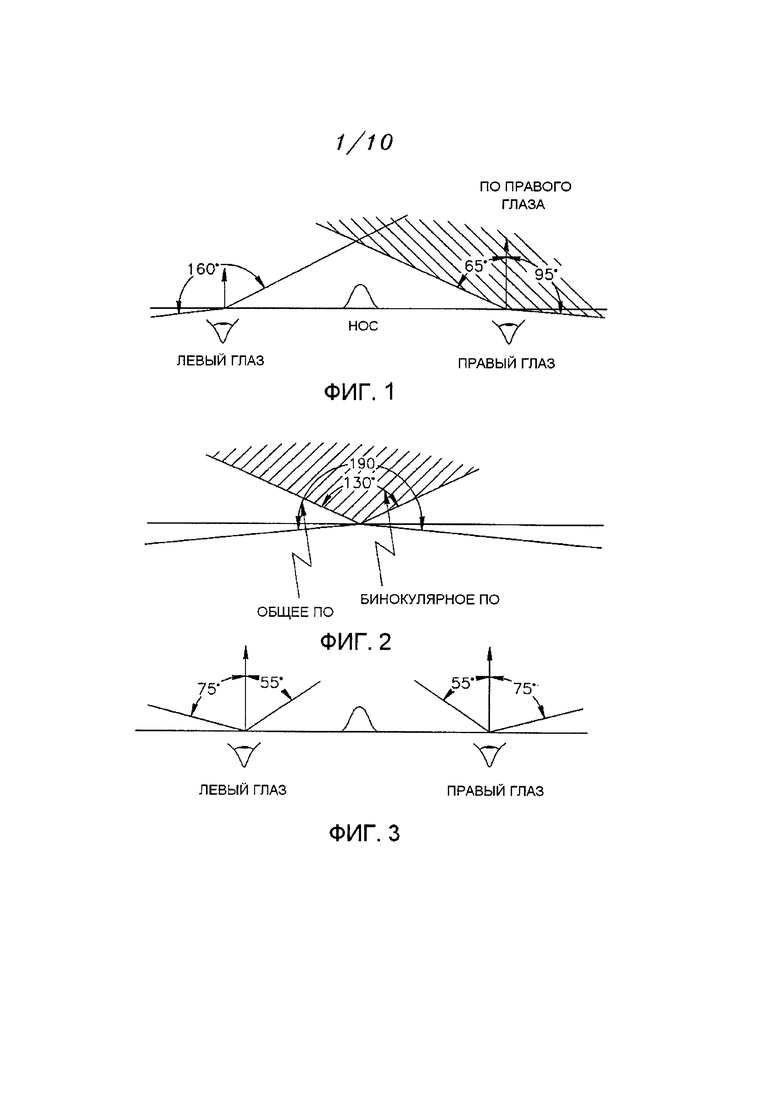
Вергентное движение глазных яблок представляет собой одновременное движение обоих глаз в противоположных направлениях для получения и поддержания одного бинокулярного видения. При просмотре человеком объекта, глаза должны поворачиваться вокруг вертикальной оси так, чтобы проекция изображения была расположена в центре сетчатки в обоих глазах. Для просмотра близкого объекта, глаза поворачиваются друг к другу (конвергенция), тога как для просмотра удаленного объекта они поворачиваются друг от друга (дивергенция).
Пример угла δ, на который глаза должны поворачиваться «внутрь» для небольшого расстояния до объекта, например, 350 мм, показан на фиг. 4. Этот угол δ вычислен как Arctgδ=IPD/2×D, где IPD - расстояние между зрачками, и D представляет собой расстояние до объекта. В ситуации, изображенной на фиг. 4, IPD принят 65 мм и D=350 мм.
Таким образом, можно без труда понять, что дополнительные мышцы глаз должны быть в состоянии перемещать глаза очень сложным и одновременно скоординированным образом для гарантированного обеспечения нормального визуального восприятия. Кроме того, можно понять, что любое нарушение в движении по меньшей мере одного глаза будет связано с несоосностью, приводящей к нарушению зрения.
В представленном ниже описании будут использованы следующие термины:
- Термин «ведущий глаз» относится к нормальному, здоровому глазу. В случае переменного косоглазия ведущий глаз будет определен обрабатывающим блоком для обработки данных.
- Термин «неведущий глаз» или «наклоненный глаз» относится к глазу, у которого есть проблема, например, частичная или полная неподвижность, приводящая в результате к тому, что такой глаз не смотрит в необходимом направлении и не может быть размещен согласованно с ведущим глазом.
- Термин «широкоугольная камера» относится к видеокамере с относительно коротким фокусным расстоянием, которое обеспечивает угол обзора шире приблизительно 70°.
- Термин «цифровая камера» относится к видеокамере, которая снабжена твердотельным датчиком (CCD или CMOS или другой датчик), который обеспечивает возможность захвата и предоставления захваченных изображений в цифровой форме.
- Термин «отслеживание глаза» относится к процессу измерения любой точки пристального взгляда («в какое место мы смотрим»), или к движению глаза относительно головы.
- Термин «отслеживающее средство для отслеживания глаза» относится к измерительному устройству для измерения положений глаза и движения глаза.
- Термины «пристальный взгляд», «пристально смотреть» и их объединения могут быть использованы поочередно и означают «смотреть на объект обстановки».
Задача, подлежащая решению
Множество людей всех возрастов страдают различными патологиями дополнительных глазных мышц или глазодвигательного нерва или мозга. Такие патологии могут привести в результате к так называемому косоглазию, то есть состоянию, в котором один глаз не может смотреть в одном направлении в пространстве с другим глазом и, следовательно, возникает несоостность обоих глаз. Вследствие такой несоосности может возникнуть двойное видение (Диплопия).
Глазная несоосность может быть горизонтальной, и/или вертикальной, и/или поворотной.
В некоторых видах косоглазия у неведущего глаза есть постоянное угловое отклонение от необходимого направления (такое явление известно как эзотропия или экзотропия); он может смотреть в неподвижном направлении в пространстве, свободно передвигаться и т.д. Все эти явления могут быть связаны с горизонтальным и поворотным и/или вертикальным полем обзора.
Непаралитическое косоглазие, со всеми его производными, является своего рода нарушением зрения, в котором, несмотря на работу дополнительных глазных мышц, такие мышцы, тем не менее, не поворачивают неведущий глаз для точного следования в необходимом направлении, диктуемом ведущим здоровым глазом. Экзотропия, эзотропия, гипертропия, гетерофория и т.д. являются лишь немногими примерами непаралитического косоглазия.
Паралитическое косоглазие, со всеми его производными, является своего рода нарушением зрения, в котором некоторые или все дополнительные глазные мышцы не функционирует частично или полностью, приводя в результате к частичному или полному параличу неведущего глаза.
В более серьезной ситуации все эти проблемы могут возникать в обоих глазах.
Вышеупомянутые патологии вызваны различными причинами. Среди возможных причин можно было бы выделить заболевание мозга, связанное с координацией движения глаза, проблемы, связанные с глазодвигательным нервом, или проблемы, связанные по меньшей мере с одной дополнительной глазной мышцей.
Иногда, в попытке избежать диплопии, мозг может игнорировать изображение от одного глаза, такой процесс известен как подавление или амблиопия. Подавление является более частым в детстве, когда мозг еще развивается. Таким образом, дети с косоглазием почти никогда не жалуются на диплопию, тогда как взрослые, которые заболевают косоглазием, почти всегда жалуются на это. В развивающемся ребенке такое явление может препятствовать надлежащему развитию зрения в пораженном глазу, приводя в результате к амблиопии. Некоторые взрослые также могут подавить свою диплопию, но их подавление нечасто такое глубокое или такое эффективное и занимает больше времени для установления. Таким образом, многие из тех людей, имеющих диплопию, страдают от затуманенного зрения, боли в глазах, головной боли, тошноты, проблем с равновесием и т.д. В случаях отсутствия лечения неведущий глаз должен быть прикрыт, скрыт или дегенерирован. Это связано с нарушением восприятия глубины.
Однако следует понимать, что патологии, которые упомянуты в приведенном выше описании, следует рассматривать как лишь неограниченные примеры нарушения зрения, которые могут быть вылечены настоящим изобретением.
Известны попытки решения проблем, связанных с нарушением зрения вследствие несоосности глаз и, в частности, с нарушением, связанным с косоглазием.
В документе GB 1096997 раскрыто устройство для лечения косоглазия. Данное устройство предназначено для корректировки косоглазия, и оно содержит экран, киноаппарат для формирования двух дополнительных изображений на экране и две офтальмоскопические установки, расположенные так, что они передают разные изображения разным глазам больного и обеспечивают возможность анализа изображений, сформированных на сетчатке каждого глаза, причем такие установки выполнены с возможностью их независимого регулирования для выравнивания с соответствующими оптическими осями глаз больных. Схема расположения устройства такова, что составное изображение, просматриваемое больным, кажется, что находится на экране, и больной может дотронуться до экрана для переобучения глаз.
Наиболее близким к настоящему изобретению является способ и устройство, предложенное Дж. Лэмпречтом (J. Lamprecht) в его патенте США №5875018 с датой подачи 26 сентября 1994 года.
Изобретение, описанное в этом патенте, основано на идеи использования механически поворачиваемой видеокамеры для создания изображения, которое должно быть увидено неведущим глазом, если бы оно было нормально, и отображения данного изображения через пучок волоконной оптики на экране, расположенном перед неведущим глазом. Перед отображением созданного изображения оно приводится в угловое соответствие с изображением, увиденным ведущим глазом, с учетом углового отклонения между ведущим и неведущим глазом.
Для установки угловой согласованности отслеживающее средство для отслеживания глаза должно определить угол пристального взгляда ведущего глаза, затем видеокамера, создающая изображение для неведущего глаза, механически поворачивается для принятия направления под углом пристального взгляда, и изображение, созданное камерой, проецируется на экране, расположенном напротив неведущего глаза.
Однако такая идея никогда не реализовывалась как реальное коммерчески доступное устройство, подходящее для людей, страдающих от различных видов косоглазия.
Некоторые из причин, которые, вероятно, препятствовали практической реализации идеи Лэмпречта, перечислены в приведенном ниже описании:
а. Механически поворачиваемая видеокамера, которая должна отслеживать угол пристального взгляда ведущего глаза, требует времени для изменения направления обзора камеры. Поскольку движения глаз очень быстры, изображение, созданное механически поворачиваемой камерой, будет отставать от быстрого движения ведущего глаза, и поэтому вместо реального изображения камерой будет создано нереалистичное изображение переходного состояния, и реальное изображение, увиденное ведущим глазом и отстающее изображение, созданное механически поворачиваемой камерой, не смогут быть совмещены мозгом.
b. Механически поворачиваемая видеокамера громоздкая и тяжелая; она сложная, дорогая и нуждается в обслуживании.
c. Механические системы, в общем случае, и механически поворачиваемые камеры, в частности, требуют более высокой энергии для их функционирования и, таким образом, более тяжелых аккумуляторных батарей.
d. Устройство для создания изображения, используемое в установке Лэмпречта, соединено с экраном визуального наблюдения волоконной оптикой, и изображение передается экрану визуального наблюдения через пучок оптического волокна. Данное решение громоздко и не обеспечивает возможности достижения изображения высокой четкости, так как количество светопроводящих нитей (волоконная оптика) в пучке ограничено. Необходимое количество пикселов для получения изображения хорошего качества находится в диапазоне миллионов; однако волоконно-оптический кабель пучок, состоящий из миллионов нитей, была бы непрактичен.
Вследствие причин, упомянутых в приведенном выше описании, решение Лэмпречта привело в результате к большому, тяжелому и громоздкому устройству, разработанного в виде шлема. Как бы то ни было, даже при том, что такое устройство шлема может быть выполнимо, оно будет не практично для повседневного использования и не будет обеспечивать достаточной четкости для изображения хорошего качества, поскольку четкость, обеспеченная светопроводящим кабелем, ограничена.
В заключении можно констатировать, что даже при том, что идея Лэмпречта уже была разработана в 1994 году, давно ощущаемая проблема нарушенного зрения, связанная с несоосностью глаз по-прежнему остается нерешенной и требует соответствующего решения.
Сущность изобретения
Основная задача настоящего изобретения заключается в создании улучшенного способа и системы для лечения нарушения зрения, обеспечивающих возможность значительного уменьшения или преодоления недостатков известных в уровне техники решений.
В частности первая задача настоящего изобретения заключается в создании нового и улучшенного способа и системы для лечения нарушения зрения, использующего широкоугольную цифровую камеру, которая по существу неподвижна и которая не требует механического перемещения, например, поворота для отслеживания угла обзора глаза.
Дополнительная задача настоящего изобретения заключается в создании нового и улучшенного способа и системы для лечения нарушения зрения, использующего широкоугольную миниатюрную видеокамеру с CCD или CMOS, расположенную вблизи неведущего глаза, и, таким образом, исключается необходимость в светопроводном кабеле для электрического соединения между обрабатывающим блоком для обработки данных и дисплеем.
Дополнительная задача настоящего изобретения заключается в создании нового и улучшенного способа и системы для лечения нарушения зрения, использующего обрабатывающий блок для обработки данных.
Другая задача настоящего изобретения заключается в создании нового и улучшенного способа и системы для лечения нарушения зрения, которая может быть реализована в виде компактных, легких и удобных корректирующих очков.
Другая задача настоящего изобретения заключается в создании нового и улучшенного способа и системы для лечения нарушения зрения, которые обеспечивают возможность надежного отслеживания глаза со скоростью, соответствующей скорости движений глаз.
Еще одна задача настоящего изобретения заключается в создании нового и улучшенного способа и системы для лечения нарушения зрения, которые обеспечивают возможность создания изображения хорошего качества с необходимой четкостью и отображения данного изображения без искажения перед неведущим глазом.
Вышеупомянутые задачи решены настоящим изобретением при его реализации в качестве способа лечения и системы для лечения нарушения зрения.
В частности, при реализации настоящего изобретения в качестве способа, указанный способ включает этапы, согласно которым:
выбирают один глаз в качестве ведущего глаза при одновременном выборе второго глаза в качестве неведущего глаза,
отслеживают текущее положение ведущего глаза при его пристальном взгляде на обстановку и определяют текущее направление пристального взгляда ведущего глаза,
получают электронным образом посредством цифровой видеокамеры изображение обстановки, на которую пристально смотрит больной,
отслеживают текущее положение неведущего глаза и определяют направление пристального взгляда неведущего глаза,
вычисляют угловое отклонение между указанным направлением пристального взгляда ведущего глаза и направлением пристального взгляда неведущего глаза,
обрабатывают электронным образом указанное изображение обстановки таким образом, что после обработки указанное изображение становится сдвинутым электронным образом в соответствии с указанным угловым отклонением,
и отображают сдвинутое изображение перед неведущим глазом.
При реализации настоящего изобретения в качестве системы, указанная система имеет размеры и выполнена в виде корректирующих очков с прикрепленным к ним отслеживающим устройством, выполненным с возможностью отслеживания движения по меньшей мере одного из глаз больного, устройством для создания цифрового изображения, выполненным с возможностью создания электронным образом изображения обстановки, возникающей перед больным, обрабатывающим блоком для обработки данных, выполненным с возможностью электронной обработки указанного изображения вместе с данными отслеживания, созданными отслеживающим устройством, отображающим устройством, выполненным с возможностью визуального отображения обработанного электронным образом изображения по меньшей мере перед одним из глаз больного, причем указанные корректирующие очки электрически соединены с источником энергии для подачи питания на отслеживающее устройство, устройство для создания изображения, обрабатывающий блок для обработки данных и отображающее устройство.
Главная идея, лежащая в основе настоящего изобретения, состоит в том, чтобы использовать миниатюрную широкоугольную цифровую видеокамеру, которая может быть неподвижна и не требовать механического перемещения для получения полного изображения обстановки, увиденной ведущим глазом. Камера будет создавать электронным образом виртуальное изображение обстановки и затем представлять данное изображение, после его электронной обработки, неведущему глазу. Такая камера выполнена с возможностью электронного сканирования всего необходимого поля обзора. Сканирование может выполняться бесперебойно и со скоростью, соответствующей скоростям движений глаз. Поскольку камера является малогабаритной, то вся система может быть осуществлена, например, как компактные корректирующие очки, которые удобны для носки больным.
Посредством обрабатывающего блока для обработки данных можно автоматически контролировать результаты лечения и, при необходимости, изменять параметры лечения.
Следует отметить, что цифровые видеокамеры уже были известны в течение довольно длительного периода времени и, в частности, они уже были доступны на дату подачи заявки на патент Лэмпречта. Тем не менее, цифровая видеокамера не использовалась тогда, и не используется сейчас, несмотря на продолжающее существование в течение очень долгого времени проблемы поврежденного зрения вследствие несоосности глаз. Такой факт указывает, что настоящее изобретение не очевидно.
Другая особенность, используемая в настоящем изобретении, заключается в использовании миниатюрного устройства для создания изображения и размещения устройства для создания изображения в непосредственной близости по меньшей мере от одного из глаз. Благодаря такому положению, изображение, отправленное на отображающее устройство, может иметь высокую четкость, поскольку нет необходимости в громоздкой связке волоконной оптики для передачи изображения.
Настоящее изобретение будет подходить для больных, страдающих от нарушения зрения, связанного по меньшей мере частично с диплопией по меньшей мере одного глаза.
Настоящее изобретение могло быть применено для тренировки, лечения зрениия, восстановления, оценки, измерения, диагноза и анализа нарушения зрения.
В частности, настоящее изобретение могло быть применено для лечения больных, страдающих от различных типов косоглазия, подобных двустороннему косоглазию, одностороннему косоглазию, переменному косоглазию, сходящемуся косоглазию, экзотропному косоглазию и гипертрофическому косоглазию.
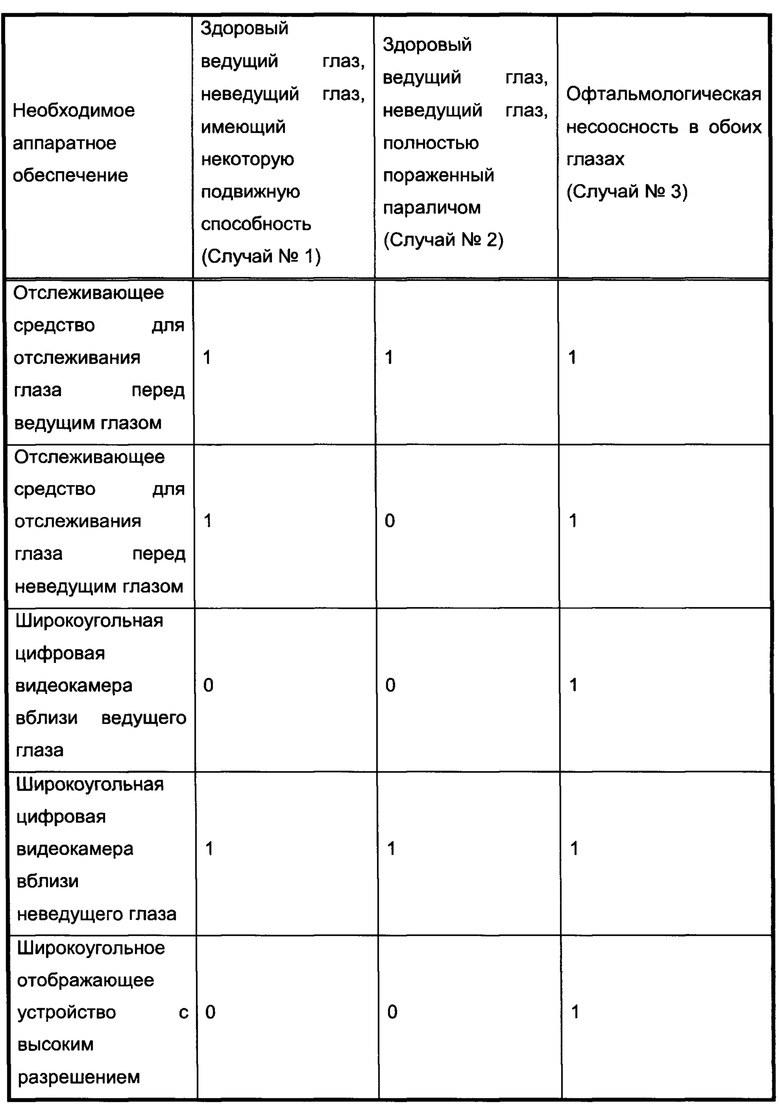
В частности, настоящее изобретение было бы подходящим для лечения нарушения зрения в следующих трех ситуациях:
1. Здоровый ведущий глаз, неведущий глаз сохраняет некоторые движущиеся способности.
2. Здоровый ведущий глаз, неведущий глаз полностью парализован.
3. Офтальмологическая несоосность обоих глаз (оба глаза имеют переменное косоглазие, неустойчивое или оба глаза с сопряженными параличами пристального взгляда).
Только что настоящее изобретение было изложено кратко. Для лучшего понимания настоящего изобретения, а также его вариантов реализации и преимуществ, в приведенном ниже описании представлено подробное объяснение настоящего изобретения со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На фиг. 1 схематично показано монокулярное поле зрения нормальных глаз.
На фиг. 2 схематично показано бинокулярное поле зрения нормальных глаз.
На фиг. 3 схематично показаны амплитуды движений нормальных глаз.
На фиг. 4 схематично показано вычисление угла сходимости.
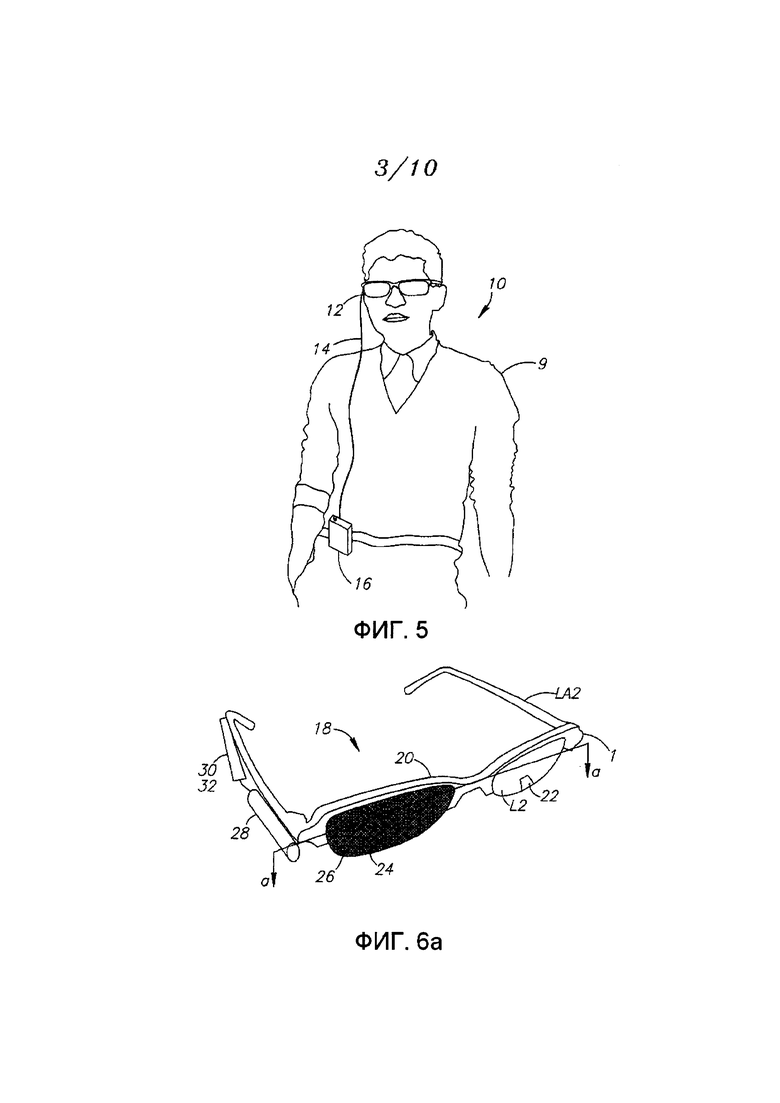
На фиг. 5 изображен общий вид системы настоящего изобретения в момент носки его больным в качестве корректирующих очков.
На фиг. 6а показан изометрический вид варианта реализации системы настоящего изобретения, реализованного в виде корректирующих очков.
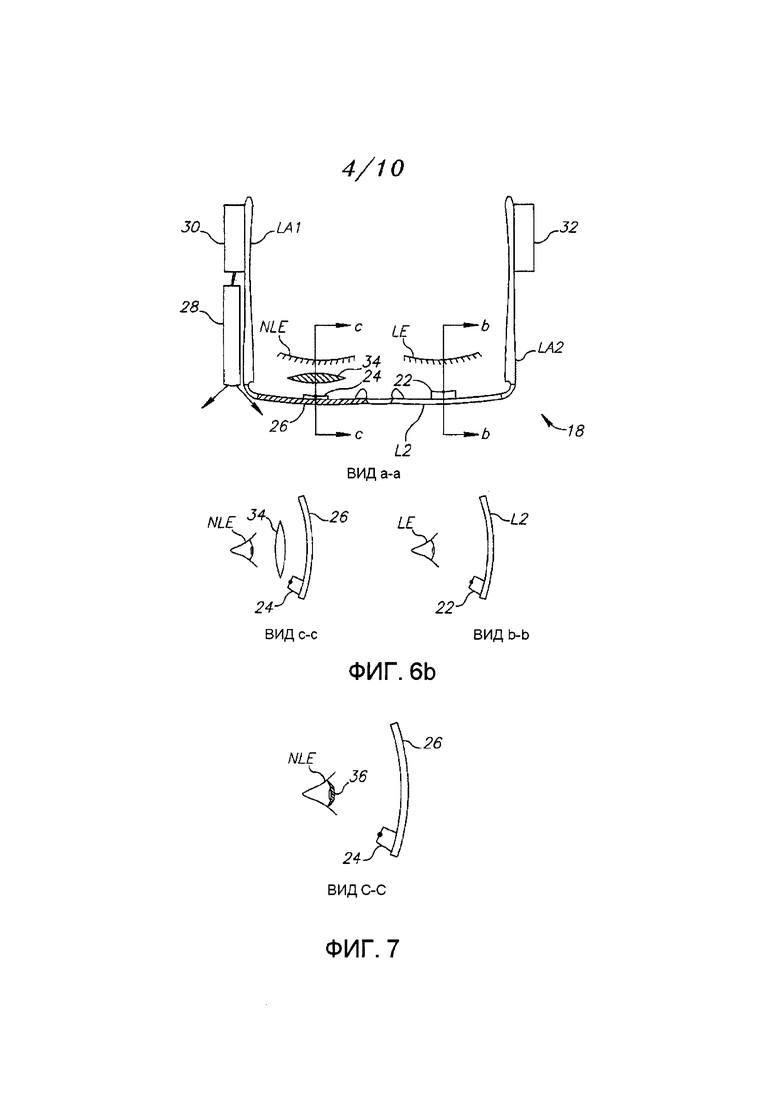
На фиг. 6b схематично показаны поперечные разрезы, выполненные по а-а, b-b и с-с на виде, представленном на фиг. 5.
На фиг. 7 схематично показан альтернативный вариант реализации для поперечного разреза с-с.
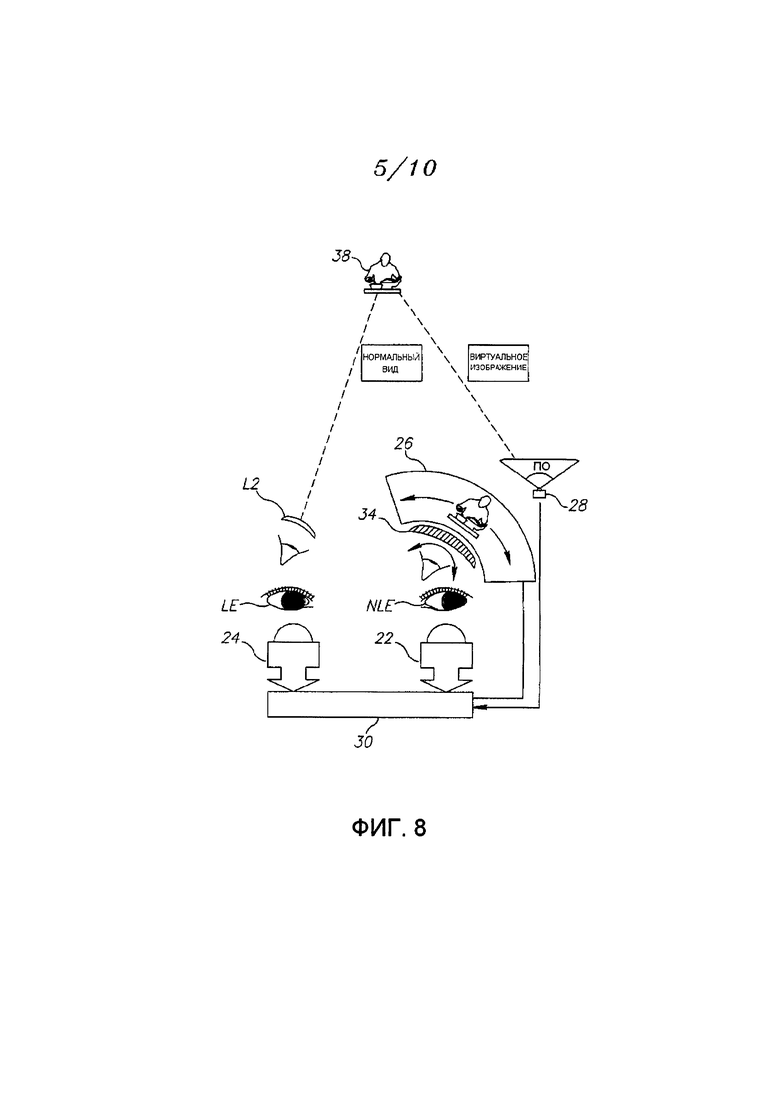
На фиг. 8 показан вариант реализации блок-схемы системы настоящего изобретения.
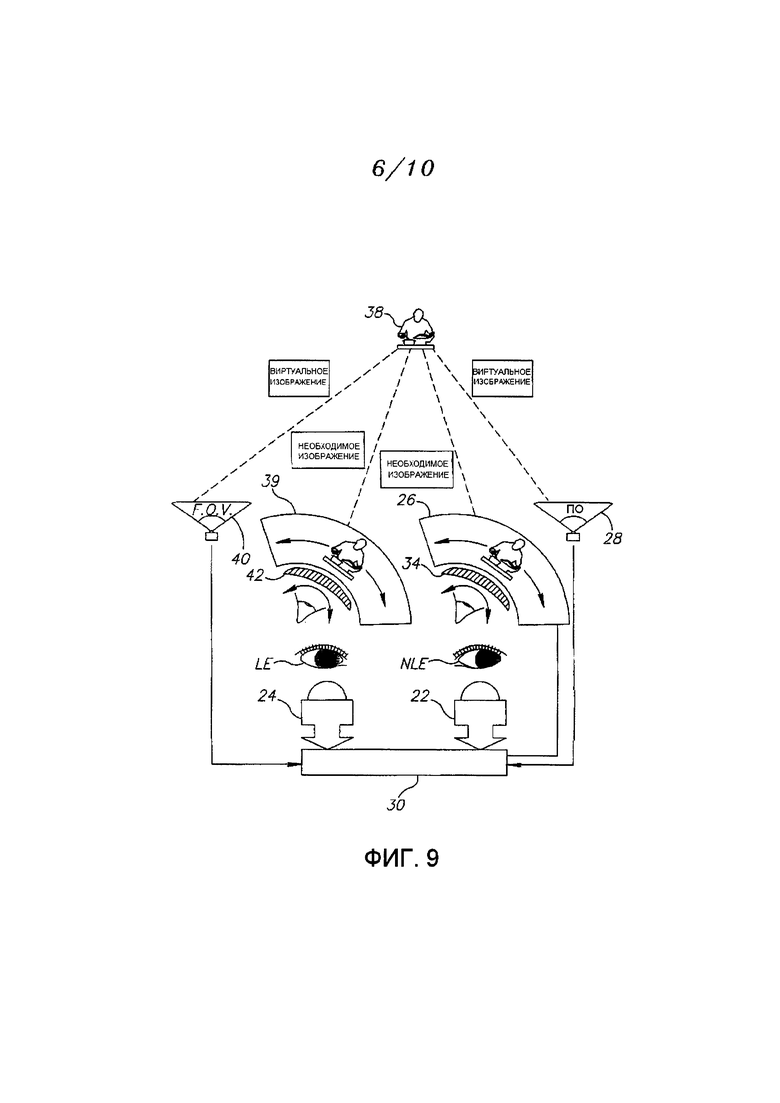
На фиг. 9 показан альтернативный вариант реализации блок-схемы системы настоящего изобретения.
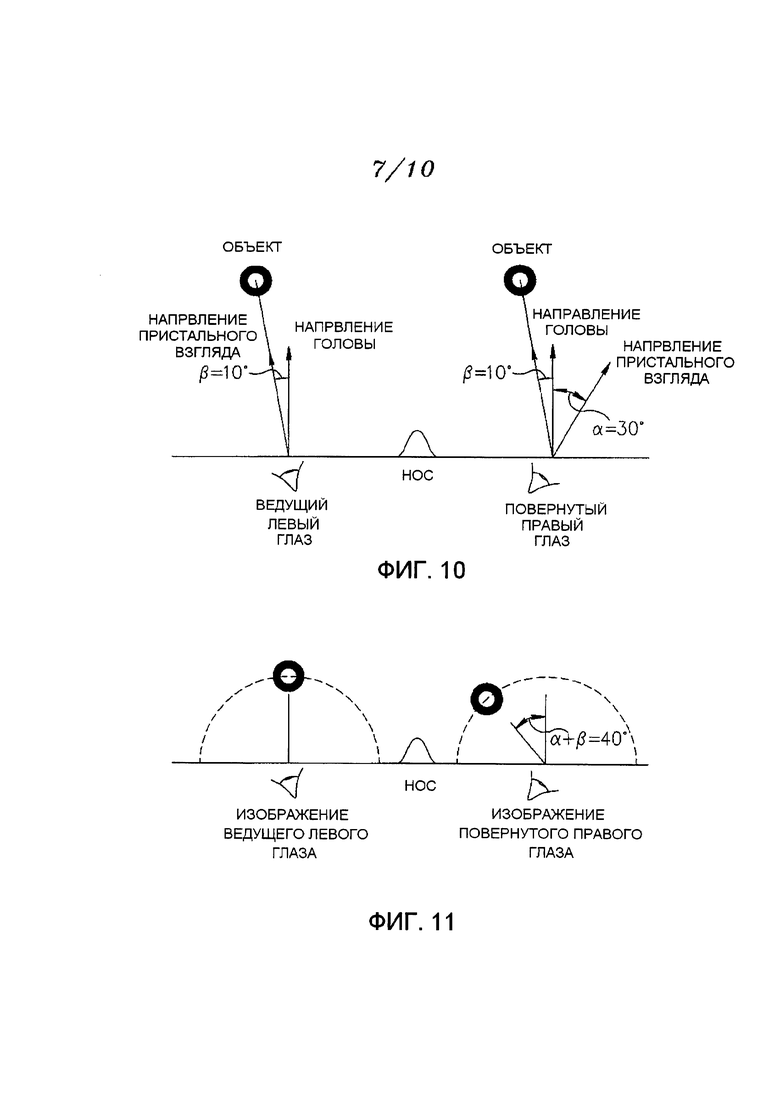
На фиг. 10 схематично показано направление пристального взгляда и направление ведущего глаза и неведущего глаза перед корректировкой углового отклонения.
На фиг. 11 схематично показано восприятие изображения объекта ведущим глазом и неведущим глазом до корректировки углового отклонения.
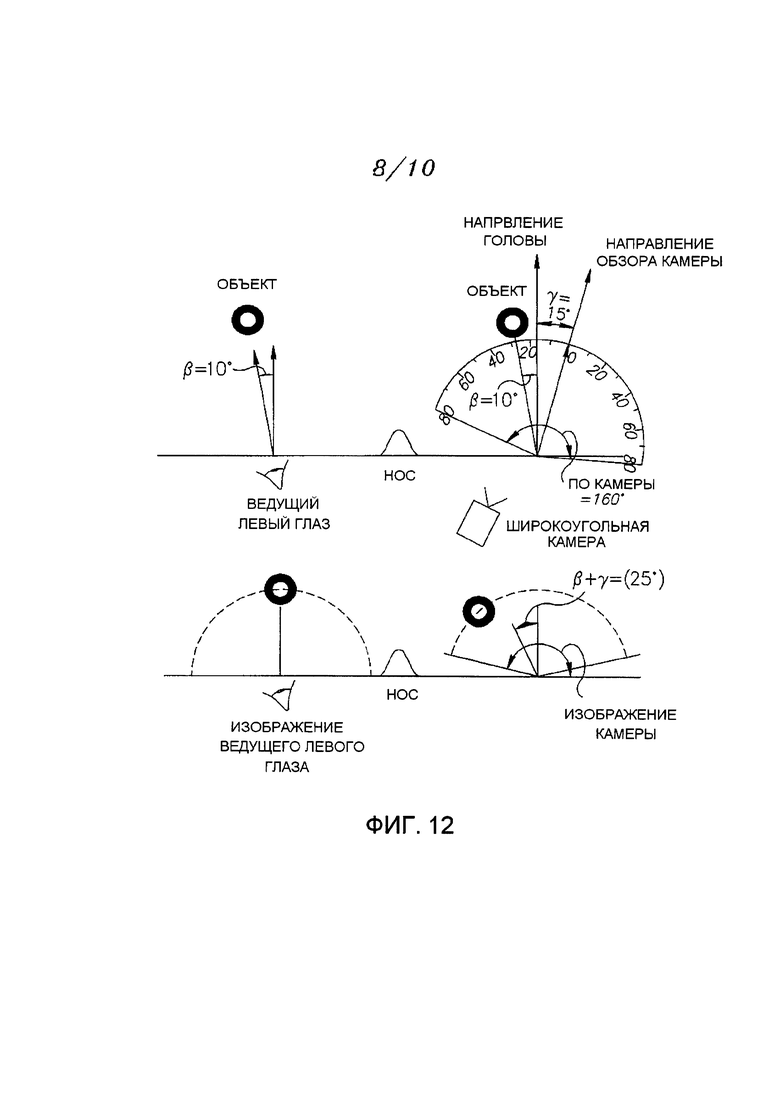
На фиг. 12 схематично показано направление обзора ведущего глаза и направление обзора камеры до корректировки углового отклонения.
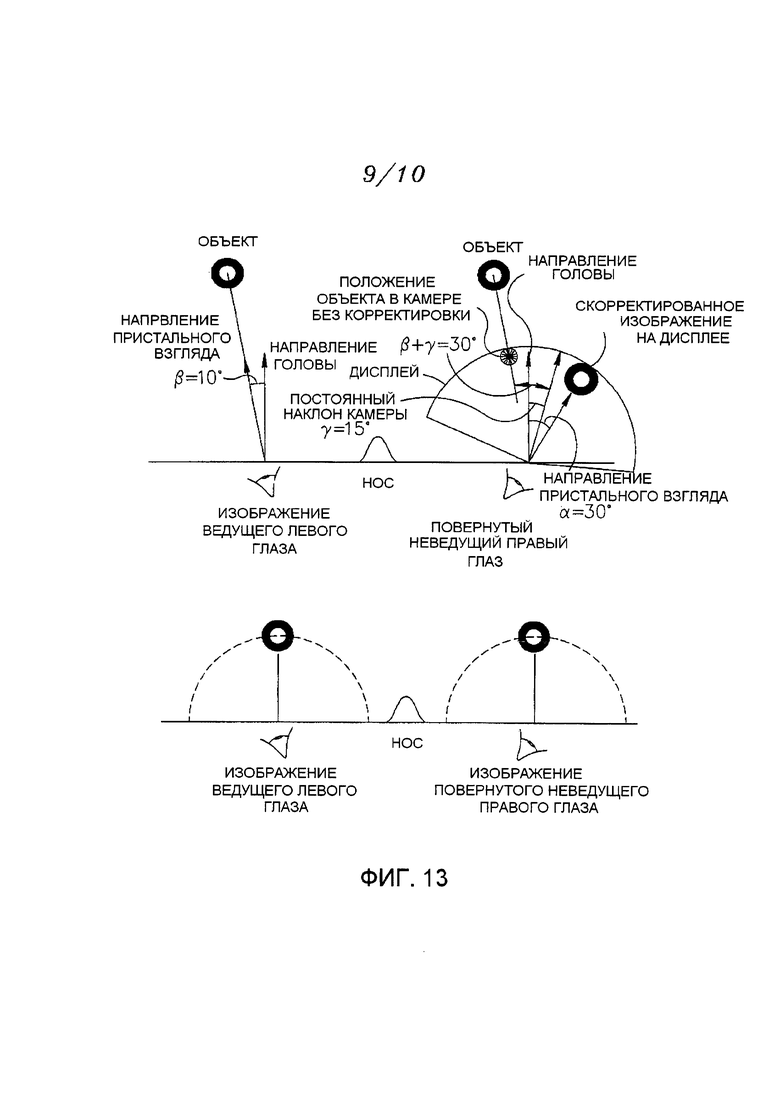
На фиг. 13 схематично показано восприятие изображения объекта ведущим глазом и неведущим глазом после корректировки углового отклонения.
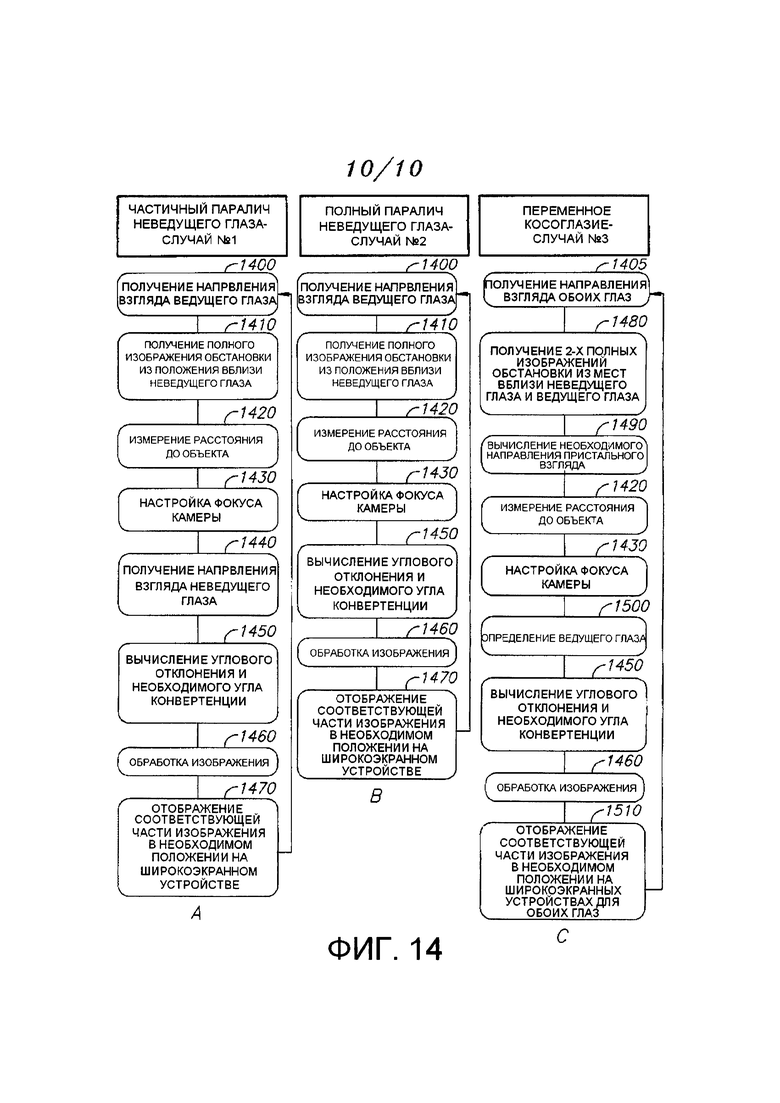
На фиг. 14а, b, c изображены блок-схемы последовательности операций различных вариантов реализации способа настоящего изобретения.
Подробное описание
На фиг. 5-7 показан вариант реализации системы настоящего изобретения.
В общем, представлена система 10, которая содержит пригодное для носки больным 9 головное устройство 12, электрически соединенное посредством соединяющего кабеля 14 с внешним компонентом 16 для обработки и возбуждения. Данный компонент содержит обрабатывающий блок для обработки данных и источник энергии, например, аккумуляторную батарею.
В альтернативном варианте реализации, показанном на фиг. 6а, система выполнена в виде составного головного устройства 18, содержащего обрабатывающий блок для обработки данных и аккумуляторную батарею 30, модернизированных в пределах головного устройства.
Головное устройство предпочтительно выполнено и имеет размеры, подходящие для использования при надевании головного устройства. Такое устройство может быть выполнено в виде очков.
В приведенном ниже описании данное устройство будет упомянуто в качестве корректирующих очков, чтобы охватить любое из связанных устройств, таких как очки, предохранительные очки, корректирующие линзы и т.д., используемое для обеспечения помощи зрительного восприятия или для защиты глаз.
В приведенном ниже описании термин отслеживание глаз будет упомянут, главным образом, применительно к отслеживанию глаз посредством сканирования в горизонтальном направлении. Тем не менее, следует понимать, что оно равным образом применимо к вертикальному направлению, и система настоящего изобретения выполнена с возможностью измерения, исследования и решения проблем нарушения зрения, связанных с несоосностью в поворотном, горизонтальном и вертикальном направлениях пристального взгляда.
На фиг. 6а система настоящего изобретения разработана в качестве корректирующих очков, выполненных, например, в виде очков, имеющих оправу 20 с линзой L2. Линза L2 прозрачна для обеспечения беспрепятственного обзора ведущему глазу. Она может представлять собой обычную линзу или оптическую линзу в том смысле, что она может иметь заданное число диоптрии, при условии наличия у больного проблем фокусировки.
Оправа снабжена двумя боковыми дужками LA1 и LA2. После надевания корректирующих очков на голову больного, линза L2 располагается напротив ведущего глаза. Линза 34 располагается напротив неведущего глаза.
Корректирующие очки удерживают пару отслеживающих средств 22, 24 для отслеживания глаза, расположенных спереди и под глазами. Точное положение каждого отслеживающего средства для отслеживания глаза выбирается таким образом, что оно располагается приблизительно на 2,5 см ниже соответствующего глаза и приблизительно на 45 градусов ниже/вперед. Благодаря такому положению не возникает загораживания. Практически отслеживающее средство для отслеживания глаза может представлять собой видеокамеру, основанную на отслеживающем средстве для отслеживания глаза, имеющую частоту выборки по меньшей мере 30 Гц. Пример подходящего отслеживающего средства для отслеживания глаза представляет собой отслеживающее устройство «SMI GazeWear», производимое компанией «SensoMotoric Instruments GmbH», Германия.
Корректирующие очки содержат по меньшей мере одно широкоугольное отображающее устройство 26, перекрывающееся по меньшей мере с полем обзора неведущего глаза. Практически данный дисплей расположен напротив неведущего глаза. В качестве подходящего широкоугольного отображающего устройства может быть использован микро дисплейный цветной экран ЕМА-100502 SXGA XL, выпускаемый «eMagin Corporation*, США. Данный дисплей имеет общую матрицу пикселов 1292 (×3) × 1036 пикселов.
Корректирующие очки дополнительно содержат по меньшей мере одну широкоугольную миниатюрную цифровую видеокамеру 28 с высоким разрешением, прикрепленную к одной из боковых дужек, предпочтительно вблизи неведущего глаза. Такое расположение необходимо для достижения правильного смещения между ведущим глазом и видеокамерой для правильного стереоскопического изображения. Практически камера расположена в стороне от неведущего глаза и отделена от него расстоянием приблизительно 2,5 см. Необходимо, чтобы камера имела угол обзора по меньшей мере 70 градусов, предпочтительно более 100 градусов, и было бы предпочтительно, если бы камера была снабжена средствами для автоматического фокусирования. Камера закреплена на оправе таким образом, что она по существу неподвижна, а в пределах ее поля обзора она сканирует изображение обстановки электронным образом.
Примером подходящей камеры выступает цифровая камера «DogCam Bullet HD WIDE», распространяемая «DCS Systems Ltd.», Англия. Такая видеокамера представляет собой видеокамеру с высоким разрешением 720р, и она имеет широкоугольную линзу с углом обхвата 135 градусов.
Корректирующие очки дополнительно содержат миниатюрный обрабатывающий блок 30 для обработки данных и возбуждающий блок 32. Хотя на изображении конкретно не указано, тем не менее, следует понимать, что обрабатывающий блок для обработки данных снабжен соответствующей памятью и другими периферийными схемами.
Практически обрабатывающий блок для обработки данных прикреплен к одной из боковых дужек. На фиг. 6b видно, что обрабатывающий блок 30 для обработки данных прикреплен к дужке LA1, а возбуждающий блок 32 прикреплен к дужке LA2.
Хотя подробно и не показано, однако следует понимать, что между видеокамерой, отслеживающими средствами для отслеживания глаза, отображающим устройством и обрабатывающим блоком для обработки данных обеспечена возможность обмена сигналами и взаимодействия посредством соответствующей проводки или с помощью беспроводных технологий.
Также, следует понимать, что возбуждающий блок электрически соединен с вышеупомянутыми компонентами для их возбуждения.
Кроме того, следует учитывать, что в конкретной ситуации достаточно было бы одной камеры и одного отображающего устройства. Такая ситуация изображена на фиг. 6а, 6b и 8. В некоторых других ситуациях потребовалось бы множество камер и множество отображающих устройств. Такие ситуации будут подробно разъяснены в приведенном ниже описании со ссылкой на фиг. 9.
На фиг. 6b показана линза 34 окуляра. Данная линза обеспечивает возможность фокусирования неведущего глаза NLE на отображающем устройстве 26, которое расположено всего в нескольких сантиметрах от неведущего глаза. Согласно фиг. 7 вместо оптической линзы 34 с той же целью может быть использована контактная линза 36, надетая на неведущий глаз.
Теперь согласно фиг. 8-9 настоящее изобретение будет объяснено в отношении некоторых типовых случаев нарушения зрения.
Случай №1
Данный случай относится к ситуации, в которой левый глаз больного выступает ведущим глазом, а правый глаз больного выступает неведущим глазом. Неведущий глаз по-прежнему может выполнять некоторые ограниченные движения.
На фиг. 8 показана конфигурация системы в виде блок-схемы. Блок-схема, подходящая для такого случая, содержит такие компоненты, которые уже были упомянуты в приведенном выше описании в отношении фиг. 6а, 6b.
Согласно изображению линза L2 расположена перед ведущим глазом LE. Линза L2 представляет собой обычную линзу. В случае отсутствия у ведущего глаза проблем фокусирования, число диоптрии, предусмотренное для данной линзы, может равняться нолю. Во всех других случаях число диоптрии линзы L2 ведущего глаза может быть предписано специалистом по оптике. Сквозь такую линзу ведущий глаз больного имеет беспрепятственный обзор обстановки таким образом, что он может видеть, например, объект 38, расположенный перед ним.
Первое отслеживающее средство 24 для отслеживания глаза расположено в нижней части линзы L2 ведущего глаза так, чтобы не загораживать обзор ведущего глаза (в практически осуществимом объеме) и, в тоже время, достоверно отслеживать положение ведущего глаза. Такое расположение представлено на фиг. 8 в качестве нормального вида.
Широкоугольное отображающее устройство 26 расположено перед неведущим глазом.
Линза 34 окуляра расположена между широкоугольным отображающим устройством 26 и неведущим глазом NLE так, чтобы обеспечить возможность просмотра неведущим глазом изображения объекта, появляющегося на дисплее в прямом фокусе. Для такой линзы окуляра необходима корректирующая сила диоптрии, требуемая для глаза больного. Таким образом, неведущий глаз видит только действительное изображение объекта, появляющееся на дисплее. Данное положение представлено на фиг. 8 в виде виртуального изображения.
Второе отслеживающее средство 22 для отслеживания глаза расположено в нижней части отображающего устройства 26 неведущего глаза таким образом, что оно не загораживает обзор неведущего глаза с одновременным обеспечением достоверного отслеживания положения неведущего глаза.
Широкоугольная цифровая видеокамера 28 расположена на правой стороне неведущего глаза так, чтобы обеспечивать беспрепятственный обзор внешней обстановки перед головой больного, как ее было бы видно здоровым неведущим глазом. Камера может быть снабжена подходящим CCD или CMOS твердотельным датчиком (или другим типом датчика) и иметь линзу с полем обзора, достаточным для охвата всего возможного поля обзора, которое увидел бы неведущий глаз NLE при способности у этого глаза обычно перемещаться. Фактически данный угол заключен в пределах угла по меньшей мере от 70 градусов и предпочтительно примерно до 100 градусов.
Поскольку у камеры есть широкоугольная линза, она мгновенно получает значительную часть поля обзора, которую можно было бы увидеть нормальным глазом в положении неведущего глаза. Такое положение предельное, так как для восприятия трехмерного изображения, человеческому мозгу приходится принимать одновременно два немного отличающихся изображения из обоих положений - положение ведущего глаза и положение неведущего глаза. Затем полученное изображение быстро обрабатывается и управляется обрабатывающим блоком 30 для обработки данных для того, чтобы должным образом отследить быстрые движения ведущего глаза. На фиг. 8 данная особенность схематично представлена стрелкой, показывающей, что изображение, замеченное камерой, посылается электронным образом от камеры к обрабатывающему блоку для обработки данных. Другая стрелка показывает, что после обработки сдвинутое изображение посылается электронным образом на отображающее устройство.
Согласно приведенному выше описанию, предпочтительно, если камера выполнена с возможностью измерения расстояния до объекта и имеет средства для автоматического фокусирования.
Случай №2
Данный случай относится к ситуации, в которой левый глаз больного представляет собой ведущий глаз, а правый глаз представляет собой неведущий глаз, и неведущий глаз имеет полный паралич.
Блок-схема системы, подходящая для рассмотрения данного случая, в основном будет такой же, как блок-схема, представленная на фиг. 8. Однако в данном случае отсутствует необходимость во втором отслеживающем средстве для отслеживания глаза, так как неведущий глаз полностью неподвижен вследствие паралича, и его направление установлено относительно направлению главы. Соответственно, угол а пристального взгляда неведущего глаза известен заранее, и его можно учитывать во всех вычислениях, необходимых для корректировки углового отклонения между ведущим глазом и неведущим глазом.
Случай №3
Этот случай направлен на ситуацию, в которой оба глаза больного пристально вглядываются в неправильных направлениях (то есть переменное косоглазие, нистагм и т.д.).
Блок-схема системы показана на фиг. 9. Без труда можно заметить, что она в основном подобна системе, представленной на диаграмме, изображенной на фиг. 8.
Следовательно, подобные компоненты обозначены подобными ссылочными номерами. Однако для конфигурации системы, подходящей для рассмотрения данного случая, потребуется дополнительная видеокамера 40, размещенная около ведущего глаза, и дополнительное широкоугольное отображающее устройство 39, размещенное перед ведущим глазом.
Дополнительная линза 42 окуляра могла бы быть размещена перед ведущим глазом.
Прямыми линиями обозначены направления виртуального образа между камерами и объектом, а также направления необходимого образа между глазами и объектом.
В представленной ниже неограничивающей таблице сведены возможные конфигурации аппаратного обеспечения системы, необходимые для каждого из представленных в приведенном выше описании случаев:
Теперь со ссылкой на фиг. 10-14 будет объяснен способ лечения нарушения зрения в соответствии с настоящим изобретением относительно упомянутых в приведенном выше описании трех случаев.
Случай №1
В представленных ниже вычислениях предположим, что объект расположен далеко от больного, таким образом, оба глаза должны смотреть параллельно в одинаковом направлении. Ведущий глаз пристально смотрит на объект в пространстве.
Предположим, что объект расположен под углом β=10° влево (относительно головы), как показано с левой стороны на фиг. 10. При пристальном взгляде больного на объект, первое отслеживающее средство для отслеживания глаза определяет направление пристального взгляда ведущего глаза, определяет угол β пристального взгляда ведущего глаза и посылает эти данные в обрабатывающий блок для обработки данных.
Второе отслеживающее средство для отслеживания глаза размещено около неведущего глаза.
Неведущий глаз пристально смотрит под произвольным углом в пространство. Предположим, что неведущий глаз пристально глядит под углом α=30° вправо, как изображено с правой стороны на фиг. 10. Этот угол α мог бы быть вызван косоглазием, которым страдает больной. Второе отслеживающее средство для отслеживания глаза определяет угол а пристального взгляда неведущего глаза и посылает эти данные в обрабатывающий блок для обработки данных.
Таким образом, ведущий глаз видит изображение объекта в середине его поля обзора, тогда как неведущий глаз, возможно, видел изображение объекта под углом α+β=40° влево от направления его пристального взгляда. Эта ситуация показана на фиг. 11. Такое угловое отклонение приводит к двум различным изображениям, которые не могут быть объединены в мозге, и изображение, которое было бы воспринято неведущим глазом, должно быть подавлено для предотвращения диплопии.
Предположим, что видеокамера, которая захватывает изображение объекта, наклонена вправо под углом γ=15° относительно головы. Такое положение показано справа на фиг. 12. В результате наклона изображение объекта как «увиденное» видеокамерой будет сдвинуто на β+γ=25° влево. Данная ситуация показана с правой стороны на фиг. 12.
Изображение, захваченное видеокамерой, передается обрабатывающему блоку для обработки данных.
Используя изображение, созданное видеокамерой, обрабатывающий блок для обработки данных вычисляет расстояние до объекта от глаз больного и хранит это расстояние в своей памяти. Вычисление может быть выполнено при использовании методов фокусирования, применяемых в фотографии, например, на основе пассивного автоматического фокусирования, фазового обнаружения, измерения контраста, активного автоматического фокусирования и т.д.
Широкоугольное отображающее устройство расположено перед неведущим глазом и загораживает весь естественный обзор для неведущего глаза. Также предположим, что широкоугольное отображающее устройство постоянно наклонено вправо под углом γ=15°, таким образом, его центр дисплея будет расположен в центре потенциального поля обзора неведущего глаза, равного 160°. Такое положение показано с правой стороны на фиг. 13.
Обрабатывающий блок 30 для обработки данных выполняет необходимую обработку изображения согласно приведенному выше описанию и вычисляет необходимое угловое отклонение для смещения изображения электронным образом для отображения изображения точно перед фактическим направлением взгляда неведущего глаза. В нашем случае изображение должно быть сдвинуто электронным образом вправо под углом, равным (β+γ)+(α-γ)=β+α=10+30=40°. После сдвига угловое отклонение в направлениях пристального взгляда обоих глаз будет скорректировано, и оба глаза смогут видеть изображение в середине поля обзора, точно перед направлением пристального взгляда их соответствующих оптических осей. Данная ситуация показана на фиг. 13. Соответственно, мозг больного сможет объединить эти два изображения в одно нормальное стереоскопическое изображение, как если бы оба глаза пристально смотрели на объект под правильным углом.
Обработка изображения, вычисление и корректировка углового отклонения будет непрерывно выполняться системой таким образом, чтобы изображение, спроецированное перед неведущим глазом, было постоянно расположено в необходимом направлении в зависимости от направления пристального взгляда ведущий глаз.
Теперь допустим, что объект расположен не далеко от больного, таким образом, оба глаза не должны смотреть параллельно на объект, а скорее под некоторым углом конвергенции.
Например, допустим, что измерительные средства для измерения расстояния измеряют расстояние до объекта, равное 350 мм. Обрабатывающий блок для обработки данных вычисляет угол конвергенций δ, который должен быть равен 5,3° согласно приведенному выше описанию и изображению на фиг. 4. Нетрудно показать, что полное добавление к углу сдвига должно составлять угол δ.
Так, в нашем случае, если объект расположен на расстоянии 350 мм от больного, и учитывая вычисления, представленные в приведенном выше описании, угол конвергенции δ=5,3°, полный угол, на который должно быть сдвинуто влево изображение, отображенное перед неведущим глазом, равняется α+β=30+5,3=35,3°.
Таким образом, также и в данном случае, неведущий глаз различил бы изображение, спроецированное перед ним на отображающем устройстве, поскольку оно расположено перпендикулярно, и смотрел бы на объект в соответствующем направлении. Такая особенность обеспечит возможность мозгу различать трехмерное изображение даже если неведущий глаз смотрит не на объект, как это должно было быть.
На практике вычисление угла конвергенции необходимо при расстоянии между объектом и головой больного, например, меньшем, чем 2 метра.
Теперь согласно фиг. 14 будет кратко описана последовательность операций по отношению ко всем трем случаям.
Для первого случая этапы процесса показаны на фиг. 14а.
Процесс лечения начинается с этапа 1400, на котором определяют направление пристального взгляда ведущего глаза и получают угол пристального взгляда. Данный этап выполняют посредством отслеживающего средства 24 для отслеживания глаза. Полученный угол пристального взгляда сохраняют в памяти обрабатывающего блока для обработки данных.
Следующий этап обозначен цифрой 1410, и на данном этапе получают обстановку всего изображения, захваченную широкоугольной цифровой камерой 28, имеющую угловой обзор, достаточный для охвата большей части обстановки.
На следующем этапе, который обозначен цифрой 1420, измеряют расстояние до просматриваемого объекта, а измеренное значение сохраняют в памяти обрабатывающего блока для обработки данных.
На следующем этапе, обозначенном цифрой 1430, регулируют фокус камеры.
Следующий этап, который обозначен цифрой 1440, содержит определение направления пристального взгляда неведущего глаза и получение угла его пристального взгляда. Данный этап выполняют посредством отслеживающего средства 22 для отслеживания глаза. Полученный угол пристального взгляда сохраняют в памяти обрабатывающего блока для обработки данных.
На следующем этапе, обозначенном цифрой 1450, обрабатывающий блок для обработки данных вычисляет отклонение между углами пристального взгляда ведущего глаза и неведущего глаза. В зависимости от ранее вычисленного расстояния до объекта также может быть вычислен угол конвергенции.
На следующем этапе, обозначенном цифрой 1460, а изображение, созданное камерой, обработано таким образом, что после обработки изображение сдвинется для корректировки углового отклонения неведущего глаза.
На следующем этапе, обозначенном цифрой 1470, сдвинутое изображение отображают на широкоугольном отображающем устройстве 26, расположенном перед неведущим глазом.
Представленную в приведенном выше описании последовательность этапов повторяют непрерывно.
Последовательность операций способа лечения, подходящего для случая 2, показана на фиг. 14b.
Следует отметить, что способ, подходящий для случая 1, в основном, похож для случая 2 и, соответственно, подобные этапы процесса на фиг. 14b обозначены подобными ссылочными номерами.
Однако в способе лечения, подходящем для случая 2, этап 1440 отсутствует, так как направление пристального взгляда парализованного неведущего глаза априорно известно.
Последовательность операций способа лечения, подходящего для случая 3, показана на фиг. 14с.
Здесь снова подобные этапы обозначены подобными ссылочными номерами. Однако в данном случае угол пристального взгляда обоих глаз должен быть определен согласно некоторому дополнительному алгоритму. Согласно одному из таких алгоритмов обрабатывающий блок для обработки данных постоянно определяет один глаз как ведущий глаз, и среднее значение угла его пристального взгляда используют в вычислениях вместо мгновенных значений, связанных с ведущим глазом.
Согласно другим алгоритмам, определение ведущего глаза может чередоваться автоматически на основании анализа движений обоих глаз.
Последовательность операций для случая 3 начинается с этапа 1405, на котором получают углы пристального взгляда обоих глаз. После этого выполняют этап 1480. Этап 1480 содержит получение двух целых изображений обстановки при помощи широкоугольных камер 28, 36. Следующий этап обозначен цифрой 1490 и он содержит вычисление необходимого направления пристального взгляда. Дальнейшие этапы 1420, 1430 подобны предыдущей последовательности операций, относящейся к случаю 1. На этапе 1500, основываясь на собранных данных от обоих глаз, назначают ведущий глаз. Следующие этапы 1450, 1460 подобны последовательности операций, относящейся к случаю 1. Последний этап обозначен цифрой 1510 и включает отображение сдвинутых изображений на соответствующем широкоугольном отображающем устройстве, расположенным перед каждым глазом.
При такой конфигурации больной будет видеть более устойчивое изображение, чем неустойчивое изображение, которое он видит в действительности без какой-либо корректировки угловых отклонений.
Таким образом, благодаря системе и способу настоящего изобретения появляется возможность лечения нарушения зрения, связанного с диплопией и параличом.
Можно лечить нарушение зрения компактной системой, которая не содержит механически движущихся компонентов, и такое лечение может быть выполнено для обеспечения удобных для больного корректирующих очков.
Следует понимать, что настоящее изобретение не ограничено представленными в приведенном выше описании примерами и что специалист в данной области техники может произвести изменения и модификации без отклонения от объема настоящего изобретения, который будет определен в пунктах приложенной формулы изобретения.
Так, например, вместо или в добавок к аккумуляторной батарее может быть обеспечено внешнее соединение с системой. Такое соединение могло бы быть использовано для электрического силового входа (например, для подзарядки), ввода данных и выходов, таких как калибровка, данные об истории, упражнения для тренировки глаз, вставка виртуального изображения и т.д.
Для достижения более высокого разрешения широкоугольная цифровая камера может быть снабжена множеством датчиков изображения.
Вместо широкоугольного отображающего устройства, прикрепленного к линзе корректирующих очков, может быть использован дисплей сканирования сетчатки глаза или другая технология. В качестве примера коммерчески доступного дисплея сканирования сетчатки глаза можно указать дисплей сканирования сетчатки глаза, разработанный компанией «Brother», Япония.
Кроме того, следует понимать, что особенности, раскрытые в приведенном выше описании, и/или в пунктах формулы изобретения, и/или в сопроводительных чертежах, отдельно и в любой их комбинации могут быть материальными для реализации настоящего изобретения в разнообразных его формах.
При использовании в пунктах формулы изобретения, термины «содержит», «включает в себя», «имеет» и их объединения означают «содержит, без ограничения».
Список ссылочных номеров
9 Больной
10 Общий обзор системы
12 Головное устройство
14 Соединяющий кабель
16 Внешний блок для обработки и возбуждения
18 Система, выполненная в виде корректирующих очков
20 Оправа
22 Отслеживающее средство для отслеживания глаза
24 Отслеживающее средство для отслеживания глаза
26 Отображающее устройство
28 Широкоугольная цифровая камера
30 Обрабатывающий блок для обработки данных
32 Источник энергии
34 Линза окуляра
36 Контактная линза
38 Объект
39 Отображающее устройство
40 Широкоугольная цифровая камера
42 Линза окуляра
LE Ведущий глаз
NLE Неведущий глаз
L2 Линза
LA1 Боковая дужка LA2 Боковая дужка
1400, 1405 1410, 1420, 1430, 1440, 1450, 1460, 1470. 1480, 1490, 1500, 1510 Этапы
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровые очки для восстановления и эмуляции бинокулярного зрения | 2022 |
|
RU2792536C1 |
| Способ определения параметров горизонтально-вертикальной диплопии | 2020 |
|
RU2738861C1 |
| Способ устранения экзофории, осложненной А-синдромом | 2020 |
|
RU2757260C1 |
| Способ устранения диплопии при парезе взора | 2021 |
|
RU2753957C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| Способ измерения величины тортиколлиса у пациентов с косоглазием | 2023 |
|
RU2830641C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОРРЕКЦИИ ПЕРВИЧНЫХ НАРУШЕНИЙ БИНОКУЛЯРНОГО ЗРЕНИЯ | 1992 |
|
RU2090164C1 |
| СПОСОБ ОДНОВРЕМЕННОЙ ОЦЕНКИ СТЕПЕНИ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ОДНОГО ГЛАЗА ДРУГИМ В ОБЛАСТИ ФИКСАЦИИ ВЗОРА И В РАЗНЫХ ТОЧКАХ ПОЛЯ ЗРЕНИЯ И КОМПЬЮТЕРИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645415C1 |
| УСТРОЙСТВО УСТАНОВЛЕНИЯ ЗАИНТЕРЕСОВАННОСТИ ЗРИТЕЛЯ ПРИ ПРОСМОТРЕ КОНТЕНТА | 2014 |
|
RU2601287C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ, УСТАНОВЛЕНИЯ, ВОССТАНОВЛЕНИЯ, РАЗВИТИЯ ФУНКЦИЙ БИНОКУЛЯРНОГО ЗРЕНИЯ И ПОВЫШЕНИЯ ОСТРОТЫ ЗРЕНИЯ | 2013 |
|
RU2572749C2 |
Группа изобретений относится к офтальмологии и более конкретно к способу и системе для лечения нарушения зрения, связанного с патологиями дополнительных глазных мышц или с диплопией, а именно с несоосностью глаз больного. Выбирают один глаз в качестве ведущего глаза при одновременном выборе второго глаза в качестве неведущего глаза. Отслеживают текущее положение ведущего и неведущего глаз при пристальном взгляде на обстановку и определяют текущее направление пристального взгляда ведущего глаза. Получают электронным образом посредством цифровой видеокамеры широкоугольное изображение обстановки, на которую пристально смотрит больной, причем цифровая видеокамера неподвижна и не требует механического смещения. Вычисляют угловое отклонение между указанными направлением пристального взгляда ведущего глаза и направлением пристального взгляда неведущего глаза. Обрабатывают электронным образом указанное изображение обстановки таким образом, что после обработки указанное изображение становится сдвинутым электронным образом в соответствии с указанным угловым отклонением, и отображают обработанное изображение по меньшей мере перед неведущим глазом. При этом используют устройство в виде корректирующих очков с прикрепленным к ним отслеживающим устройством, выполненным с возможностью отслеживания движения по меньшей мере одного из глаз больного, устройством для создания цифрового изображения и электронной обработки указанного изображения. Группа изобретений обеспечивает непрерывную коррекцию нарушения зрения, связанного с несоосностью глаз пациента, за счет сдвига электронным образом обработанного изображения обстановки, получаемого неподвижной компактной широкоугольной видеокамерой, с учетом углового отклонения между направлениями взгляда ведущего и неведущего глаз, что соответственно обеспечивает коррекцию данного углового отклонения при отображении такого сдвинутого изображения перед неведущим глазом. 2 н. и 13 з.п. ф-лы, 14 ил., 3 пр.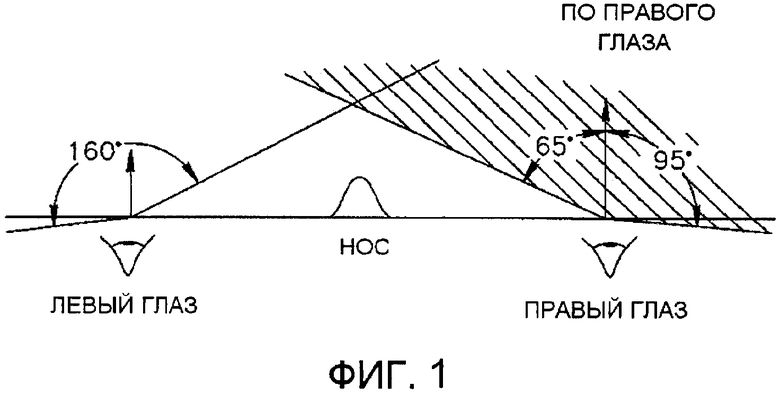
1. Способ лечения нарушения зрения, связанного с несоосностью глаз больного, согласно которому
выбирают один глаз в качестве ведущего глаза при одновременном выборе второго глаза в качестве неведущего глаза,
отслеживают текущее положение ведущего глаза при его пристальном взгляде на обстановку и определяют текущее направление пристального взгляда ведущего глаза,
получают электронным образом посредством цифровой видеокамеры (28) широкоугольное изображение обстановки, на которую пристально смотрит больной, причем цифровая видеокамера (28), по существу, неподвижна и не требует механического смещения,
отслеживают текущее положение неведущего глаза и определяют направление пристального взгляда неведущего глаза,
вычисляют угловое отклонение между указанными направлением пристального взгляда ведущего глаза и направлением пристального взгляда неведущего глаза,
обрабатывают электронным образом указанное изображение обстановки таким образом, что после обработки указанное изображение становится сдвинутым электронным образом в соответствии с указанным угловым отклонением, и
отображают обработанное изображение по меньшей мере перед неведущим глазом.
2. Способ по п. 1, включающий измерение расстояния между указанными больным и объектом.
3. Способ по п. 2, включающий вычисление угла конвергенции между направлением пристального взгляда ведущего глаза и направлением пристального взгляда неведущего глаза и корректирование углового отклонения в соответствии с углом конвергенции.
4. Способ по п. 1, согласно которому изображение получают электронным образом посредством широкоугольной цифровой видеокамеры, имеющей угол обзора по меньшей мере 70°.
5. Способ по п. 1, включающий электронное получение изображения обстановки из положения, близкого к неведущему глазу.
6. Способ по п. 1, включающий электронную обработку указанного изображения видеокамеры таким образом, чтобы оно оказывалось сдвинутым электронным образом в соответствии с указанным угловым отклонением, и отображение указанного сдвинутого изображения перед неведущим глазом.
7. Способ по п. 4, включающий регулирование фокуса указанной камеры.
8. Система для лечения нарушения зрения, связанного с несоосностью глаз больного,
причем указанная система имеет размеры, обеспечивающие возможность ее надевания на голову больного, и выполнена в виде корректирующих очков (18) с прикрепленным к ним отслеживающим устройством (22), выполненным с возможностью отслеживания движения по меньшей мере одного из глаз больного, устройством (28) для создания цифрового изображения, выполненным с возможностью создания электронным образом изображения обстановки, на которую пристально смотрит больной, обрабатывающим блоком (30) для обработки данных, выполненным с возможностью электронной обработки указанного изображения, отображающим устройством (26), выполненным с возможностью визуального отображения указанного обработанного изображения по меньшей мере перед одним из глаз больного,
причем указанные корректирующие очки (18) электрически соединены с источником энергии (32) для подачи питания на указанную систему, отличающуюся тем, что
устройство (28) для создания цифрового изображения создает широкоугольное изображение обстановки, причем устройство (28) для создания цифрового изображения по существу неподвижно и не требует механического смещения относительно корректирующих очков; и
обрабатывающий блок (30) для обработки данных выполнен с возможностью вычисления углового отклонения между направлениями пристального взгляда глаз больного и обработки изображения электронным образом, чтобы сдвинуть изображение, отображаемое на отображающем устройстве (26) электронным образом в соответствии с вычисленным угловым отклонением.
9. Система по п. 8, в которой указанное устройство (28) для создания изображения содержит широкоугольную цифровую видеокамеру с высоким разрешением с заданным углом обзора по меньшей мере 70°.
10. Система по п. 8, в которой указанные корректирующие очки (18) выполнены в виде очков, снабженных оправой (20) с прикрепленной к ней линзой, причем указанная оправа снабжена первой боковой дужкой (LA1) и второй боковой дужкой (LA2).
11. Система по п. 10, содержащая первое отслеживающее устройство (22) для отслеживания глаза и второе отслеживающее устройство (24) для отслеживания глаза.
12. Система по п. 10, в которой указанное устройство (28) для создания цифрового изображения прикреплено к одной из боковых дужек, а указанное отображающее устройство (26) закреплено по меньшей мере перед одним глазом, причем схема расположения выполнена таким образом, что устройство (28) для создания цифрового изображения расположено вблизи отображающего устройства (26).
13. Система по п. 10, содержащая первую камеру (28), прикрепленную к первой боковой дужке (LA1), и вторую камеру (40), прикрепленную ко второй боковой дужке (LA2), первое отображающее устройство (26), расположенное перед одним глазом, и второе отображающее устройство (39), расположенное перед вторым глазом.
14. Система по п. 8, в которой указанное устройство (28) для создания цифрового изображения снабжено измерительными средствами для измерения расстояния.
15. Система по п. 8, в которой указанное устройство (28) для создания цифрового изображения снабжено средствами для автоматического фокусирования.
| US 5875018 A, 23.02.1999 | |||
| US 6099124 A, 08.08.2000 | |||
| US 2004100567 A1, 27.05.2004 | |||
| US 7859562 B2, 28.12.2010 | |||
| СОЛОВЬЕВА В.В | |||
| Метод бинариметрии в диплоптическом лечении косоглазия.Тезисы докладов III Всесоюзной конференции по актуальным вопросам детской офтальмологии, Суздаль, 1989. |

