Изобретение относится к медицине, а именно к офтальмологии, и может быть использовано для лечения и динамического наблюдения пациентов с косоглазием.
Тортиколлис, или наличие вынужденного положения головы (от латинского определения torticollis, означающего «искривленная шея»), является одним из наиболее характерных проявлений бинокулярного двоения. Развитие тортиколлиса сопровождается изменением мягких тканей, скелета и нервов шеи и проявляется сгибанием, растяжением или скручиванием мышц шеи за пределами их нормального положения. Как правило, его легко можно обнаружить при визуальном осмотре пациента. Характер тортиколлиса определяется сочетанием поворота лица (в правую или левую сторону), наклоном головы (к правому или левому плечу), поднятием или опусканием головы, позволяющих пациенту избежать двоения, нечеткости зрения (так называемое субъективно комфортное положение головы). Эти компоненты могут быть проявлены в разной степени, как все перечисленные, так и частично. К развитию тортиколлиса может также привести наличие бинокулярной диплопии, которая является наиболее характерной жалобой пациентов с травматическим косоглазием. Диплопия, несмотря на субъективный характер, существенно ухудшает качество жизни пациента, затрудняет выполнение профессиональных и бытовых навыков, зачастую приводит к инвалидизации.
Для клинициста важна взаимосвязь величины угла косоглазия, степени диплопии и величины тортиколлиса, поскольку нередки случаи, когда после уменьшения величины косоглазия хирургическим путем, при косметическом улучшении пациент предъявляет жалобы на усиление двоения и ухудшение качества жизни. Измерив величину тортиколлиса до и после лечения, возможно оценить динамику функционального состояния глазодвигательнойсистемы, что позволит врачу выбрать оптимальную тактику лечения и отследить динамику состояния пациента в ходе проведения лечебных мероприятий
В доступных источниках информации не удалось обнаружить способ измерения величины тортиколлиса в цифровых значениях.
Известен способ измерения тортиколлиса с помощью устройства, состоящего из двух основных компонентов - измерительной линейки и головного держателя. Измерительная линейка имеет масштабные деления, которые позволяют определить угол наклона головы в градусах. Она может иметь различную длину в зависимости от целей измерений.
Головной держатель представляет собой устройство, которое закрепляется на голове пациента и служит для фиксации ее положения. Он может быть выполнен из мягких материалов, таких как ткань или резина, для обеспечения комфорта пациента.
Для проведения измерений специалист закрепляет держатель на голове пациента и устанавливает измерительную линейку параллельно земле. Затем он снимает показания при различных углах наклона и поворота головы и определяет степень и направление кривизны шеи.
К недостаткам способа можно отнести его субъективность, приводящую к значительным погрешностям в ходе измерений, а также невозможность оценки значений тортиколлиса при большой величине девиации и грубых нарушениях подвижности шеи.
Известно измерение амплитуды движения суставов с помощью гониомертра, представляющий собой транспортир со шкалой от 0 до 180°° к которому прикреплены два плеча. Одно из них неподвижно связано с транспортиром, а другое - подвижное - прикреплено к его центру (https://reabilitaciya.org/tbsm/205-metodika-issledovaniya-dvigatelnoj-funkcii-na-urovne-povrezhdeniya.html?start=3).
В контексте рассматриваемой проблемы способ не обладает необходимой точностью и не удобен в использовании.
Известен способ определения положения тела и его частей в пространстве с помощью устройства (патент RU №2235975), содержащего транспортир и уровень, прикрепленный к раме. Рама установлена на горизонтальной оси; вокруг оси поворачиваются два лимба: один с разметкой в градусах, через 10°, а другой в часах, причем ось 0-180° одного лимба совпадает с осью 12 часов - 6 часов другого лимба; на вертикальной оси, проходящей через центр лимбов над лимбами укреплен футляр с лазерной указкой и указателем лимбов, а под лимбами - транспортир. К недостаткам способа можно отнести недостаточную точность и невозможность оценивать значение угла поворота головы в разных плоскостях.
Известен способ исследования диплопии (патент RTJ №2797923), прототип, согласно которому выполняют предъявление светящегося объекта, разделение полей зрения с помощью анаглифических очков, совмещение двойных изображений после предъявления светящегося объекта, и оценку смещения мнимого изображения при фиксации головы пациента в определенных диагностических позициях.
К недостаткам способа можно отнести его субъективность и невозможность определения величины тортиколлиса в цифровых значениях.
Известно использование гироскопов и акселерометров в медицине для точного измерения скорости и контроля движений человека (например, патент RU №2102922, позволяющий определять параметры тремора, патент RU №2794427 используемый для определения физиологической затратности, двигательной эффективности и стабильности технических действий человека, патент RU №2736876, позволяющий определять положения человека или объекта в реальном времени и другие).
В последние годы широкое распространение получили датчики, основанные на микроэлектромеханических системах, так называемых МЭМС, поскольку они довольно просты в использовании и имеют малые габариты. МЭМС-датчики, как правило, оснащаются интегрированной электроникой обработкой сигнала и не имеют движущихся частей. Этим обуславливается их высокая надежность и способность обеспечивать стабильные показания в достаточно жестких условиях окружающей среды
Предлагаемое изобретение решает задачу разработки способа, позволяющего измерить точную величину тортиколлиса у пациентов с косоглазием и диплопией.
Технический результат от использования изобретения заключается в возможности получения точных цифровых значений величин тортиколлиса в трех плоскостях при крайних положениях головы и при любых нарушениях подвижности шеи, более полно оценить степень развития патологии, оценивать эффективность лечения в динамике, что способствует повышению эффективности принятия врачебных решений.
Технический результат достигается тем, что величину тортиколлиса определяют на основании анализа положения головы пациента в девяти диагностических позициях при проведении диплографии следующим образом.
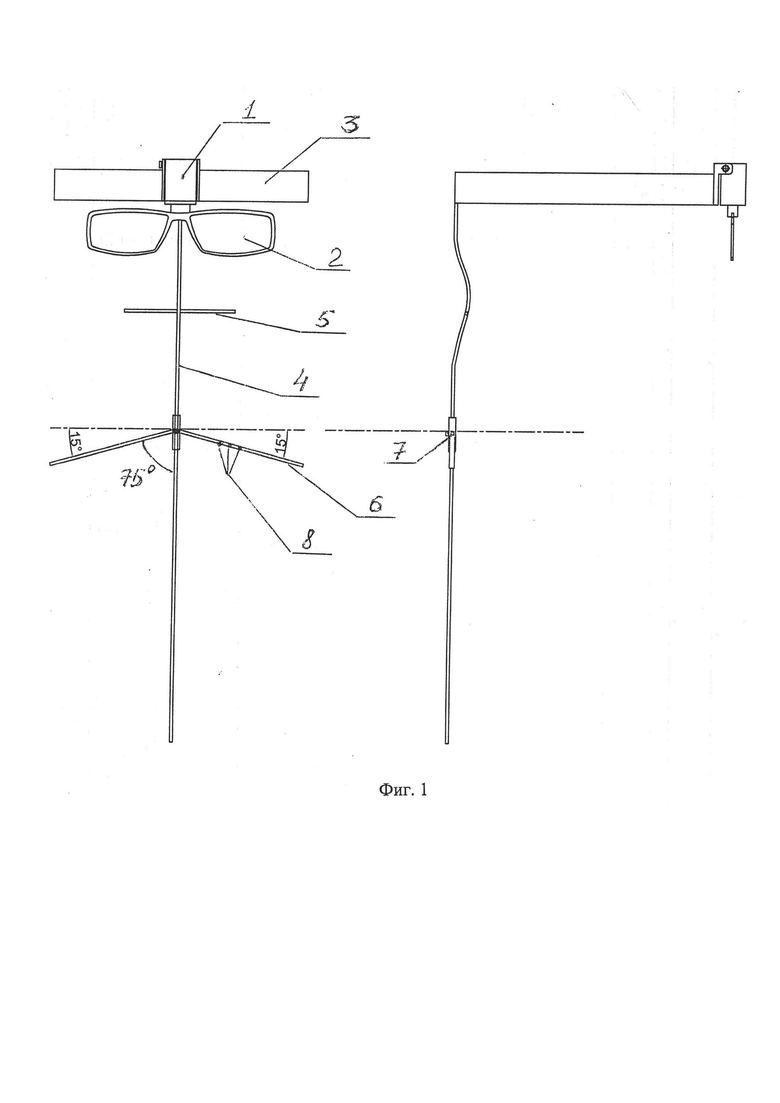
Для проведения исследования используют налобную систему инерциальной навигации, включающую MEMS-акселерометр, MEMS-гироскоп и MEMS-магнитометр, модуль беспроводной и проводной передачи данных, батарейку, инерциальный измерительный модуль MPU-9250, микроконтроллер ESP-32 и контроллер заряда, расположенную в корпусе (1) (см. фиг. 1), анаглифические очки (2), головной держатель корпуса системы инерциальной навигации и анаглифических очков с возможностью регулировки длины (3), изготовленный из легкого металлического сплава фиксатор шеи, подбородка и плеч, состоящий из центрального держателя (4), выполненного в виде стержня, изогнутого по форме затылка и позвоночника, закрепленного верхним концом в центре затылочной части налобного крепления системы навигации, к которому фиксированы во фронтальнойплоскости в своих центральных точках стержень для фиксации головы, расположенный перпендикулярной центральному держателю (5), а также стержень для фиксации плеч (6), расположенный во фронтальной плоскости под углом 75 градусов к нижней части центрального держателя, и возможностью перемещения по нему. Для фиксации к центральному держателю используют цилиндрическую муфту с болтом (7). На стержне для фиксации плеч с обеих сторон размещены по три контрастные метки разных цветов (красный, зеленый, желтый), первая из которых расположена в центральной точке держателя, а каждая последующая на расстоянии 1 см от предыдущей по направлению к шее (8).
Способ осуществляют следующим образом. На мониторе пользователя на расстоянии от 50 до 100 см закрепляют камеру разрешением не менее 640 на 480 пикселей. Пациенту фиксируют на голове держатель системы инерциальной навигации с закрепленным в зоне лба корпусом, а в зоне висков анаглифическими очками, располагают затылок пациента на горизонтальном стержне держателя головы, а на плечах фиксируют держатель плеч. Размещают пациента напротив монитора и камеры.
Систему инерциальной навигации подключают к персональному компьютеру на транспортном уровне по протоколу ТСР/IP или USB, на прикладном уровне - на бинарном протоколе передачи данных.
Программное обеспечение, установленное на компьютере, осуществляет первоначальную калибровку системы инерциальной навигации для определения начальных значений датчиков.
С помощью инерциального измерительного модуля (9-ти осевого) MPU-9250, входящего в состав системы инерциальной навигации, передают данные на микроконтроллер, который их обрабатывает и передает данные на компьютер в следующих форматах:
• ускорение по оси X, мм/с2;
• ускорение по оси Y, мм/с2;
• ускорение по оси Z, мм/с2;
• изменение угла относительно оси X, градус/сек;
• изменение угла относительно оси Y, градус/сек;
• изменение угла относительно оси Z, градус/сек;
• индукция магнитного поля по оси X, мкТл;
• индукция магнитного поля по оси Y, мкТл;
• индукция магнитного поля по оси Z, мкТл;
• параметр X кватерниона;
• параметр Y кватерниона;
• параметр Z кватерниона;
• параметр W кватерниона.
На мониторе компьютера пациенту предъявляют проекцию тангенциальной сетки. Центр сетки располагают на уровне глаз пациента. На сетке по таблице Брадиса отмечены окружности, соответствующие отметкам 5°, 10°, 15° и 20°. Радиально по круговой шкале нанесены меридианы от 0 до 360°. В центре сетки расположена точка красного цвета. Пациент фиксирует взглядом точку, расположенную в центре экрана. При наличии диплопии он видит две точки.
Затем пациент медленно поворачивает голову в направлении, указанным врачом, по девяти диагностическим позициям, до момента нахождения такого положения головы, при котором нет диплопии, то есть он видит одну точку. Врач фиксирует, над меткой какого цвета находится наиболее выступающая точка подбородка пациента в момент остановки движения головы для более четкого понимания степени выраженности тортиколлиса и облегчения анализа полученных данных при динамическом наблюдении. Чем дальше от края плеча остановилась голова пациента, тем меньше степень выраженности тортиколлиса. С помощью устройства регистрируют положение головы в трех плоскостях, при котором нет диплопии, и определяют величину тортиколлиса в градусах для каждого положения головы. Информацию передают в базу данных компьютерной программы «Кинематическая диплография» Свидетельство о госуд. регистрации программы для ЭВМ №2022612594, дата Государственной регистрации в Реестре программ для ЭВМ 28 февраля 2022 г.). В дальнейшем при проведении исследований в динамике возможно оценивать изменение величины тортиколлиса. При большой величине девиации и грубых нарушениях подвижности исследование диплопии в крайних положениях головы и направлениях взгляда в девяти диагностических позициях может быть затруднено - пациент не видит изображение отклоненным глазом. В таких случаях он поворачивает голову таким образом, чтобы оба глаза могли фиксировать точку. Определение положения головы, при котором возможно проведение диплографии, то есть пациент видит одну точку, является критерием оценки динамики лечения пациента.
Диагностические позиции для определения величины тортиколлиса:
- положение головы влево/вниз, взгляд при этом направлен вправо/вверх;
- взгляд на метку «исподлобья»;
- положение головы вправо, взгляд при этом направлен вверх/влево;
- положение головы влево, взгляд при этом направлен вправо;
- центральное положение головы, взгляд прямо перед собой;
- положение головы вправо, взгляд при этом направлен влево;
- голова поднята и повернута влево, взгляд направлен вниз/вправо;
- голова поднята в центральном положении, взгляд направлен вниз;
- голова поднята и повернута вправо, взгляд направлен вниз/влево.
К исследованию в каждой последующей позиции переходят после того, как координаты предыдущей точки занесены в базу данных программы.
В каждой позиции фиксируют изменения положения системы инерциальной навигации. Для определения величины тортиколлиса рассчитывают изменения положения головы с использованием системы инерциальной навигации на основе преобразования кватерниона поворота, с учетом показаний акселерометра, магнитометра и гироскопа. Изменения положения головы и тела человека отображаются на компьютере в режиме реального времени. Полученные сдвиги прибавляются к предыдущему положению, позволяя отслеживать положение головы человека в пространстве, а также углы ее наклона. Фиксатор головы и плеч позволяет обеспечить стабильное положение затылка и плеч пациента, не препятствуя поворотам головы при выполнении исследования и обеспечивая необходимую точность измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исследования диплопии | 2022 |
|
RU2797923C1 |
| Способ исследования диплопии | 2022 |
|
RU2798076C1 |
| Способ устранения диплопии при парезе взора | 2021 |
|
RU2753957C1 |
| Способ определения показаний к хирургическому лечению нистагма | 2022 |
|
RU2780365C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ЛЕЧЕНИЯ ПРИ ЦИКЛОТРОПИИ | 2001 |
|
RU2192839C1 |
| Способ мануальной самокоррекции ограничения амплитуды экстензии в шейном отделе позвоночника у пациентов с дорсопатией на шейном уровне | 2024 |
|
RU2824715C1 |
| Способ коррекции зрения с помощью физических упражнений | 2022 |
|
RU2815164C1 |
| СПОСОБ ДИАГНОСТИКИ ДИПЛОПИИ | 1995 |
|
RU2100956C1 |
| Способ мануальной самокоррекции ограничения объема ротационных движений в шейном отделе позвоночника у пациентов с дорсопатией на шейном уровне | 2024 |
|
RU2823159C1 |
| Способ определения параметров горизонтально-вертикальной диплопии | 2020 |
|
RU2738861C1 |
Изобретение относится к медицине, а именно к офтальмологии. Используют налобную систему инерциальной навигации, включающую MEMS-акселерометр, MEMS-гироскоп и MEMS-магнитометр, модуль беспроводной и проводной передачи данных, батарейку, инерциальный измерительный модуль MPU-9250, микроконтроллер ESP-32 и контроллер заряда, расположенную в корпусе, анаглифические очки, изготовленный из легкого металлического сплава фиксатор шеи, подбородка и плеч. Осуществляют первоначальную калибровку системы инерциальной навигации для определения начальных значений датчиков, с помощью инерциального измерительного модуля передают данные на микроконтроллер, который их обрабатывает и передает данные на компьютер. На мониторе компьютера пациенту предъявляют проекцию тангенциальной сетки, расположенную на уровне глаз пациента, на сетке по таблице Брадиса отмечены окружности, соответствующие отметкам 5, 10, 15 и 20°, радиально по круговой шкале нанесены меридианы от 0 до 360°, в центре сетки располагают точку красного цвета. Пациент фиксирует взглядом точку, расположенную в центре экрана, при наличии диплопии он видит две точки; затем пациент медленно поворачивает голову в направлении, указанным врачом, по девяти диагностическим позициям до момента нахождения такого положения головы, при котором нет диплопии, то есть он видит одну точку. Врач фиксирует, над меткой какого цвета находится наиболее выступающая точка подбородка пациента в момент остановки движения головы, чем дальше от края плеча остановилась голова пациента, тем меньше степень выраженности тортиколлиса. С помощью устройства регистрируют положение головы в трех плоскостях, при котором нет диплопии, и определяют величину тортиколлиса в градусах для каждого положения головы; информацию передают в базу данных компьютерной программы; определение положения головы, при котором пациент видит одну точку, является критерием оценки динамики лечения пациента. К исследованию в каждой последующей позиции переходят после того, как координаты предыдущей точки занесены в базу данных программы. В каждой позиции фиксируют изменения положения системы инерциальной навигации. Для определения величины тортиколлиса рассчитывают изменения положения головы с использованием системы инерциальной навигации на основе преобразования кватерниона поворота, а также с учетом показаний акселерометра, магнитометра и гироскопа, и полученные сдвиги прибавляют к предыдущему положению. Применение изобретения позволит повысить эффективность принятия врачебных решений, поскольку позволяет получить точные цифровые значения величин тортиколлиса в трех плоскостях при крайних положениях головы и при любых нарушениях подвижности шеи, более полно оценить степень развития патологии, а также оценивать эффективность лечения в динамике. 1 ил.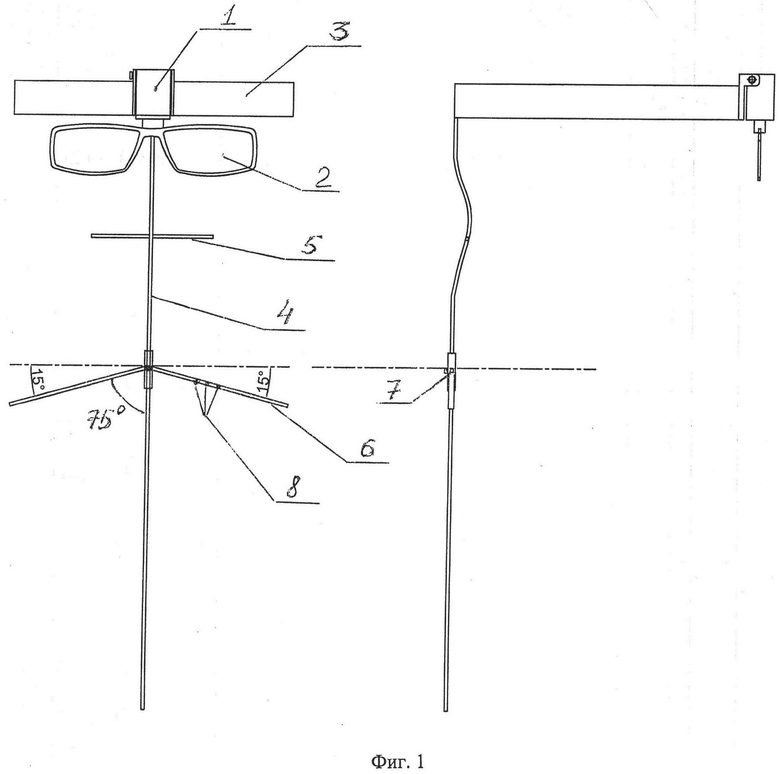
Способ измерения величины тортиколлиса у пациентов с косоглазием, включающий разделение полей зрения с помощью анаглифических очков, предъявление светящихся объектов, совмещение двойных изображений после предъявления изображения и оценку взаимного положения двойных изображений в девяти диагностических позициях, отличающийся тем, что используют налобную систему инерциальной навигации, включающую MEMS-акселерометр, MEMS-гироскоп и MEMS-магнитометр, модуль беспроводной и проводной передачи данных, батарейку, инерциальный измерительный модуль MPU-9250, микроконтроллер ESP-32 и контроллер заряда, расположенную в корпусе, анаглифические очки, изготовленный из металлического сплава фиксатор шеи, подбородка и плеч, пациенту фиксируют на голове держатель системы инерциальной навигации с закрепленным в зоне лба корпусом, а в зоне висков анаглифическими очками, располагают затылок пациента на горизонтальном стержне держателя головы, а на плечах фиксируют держатель плеч, размещают пациента напротив монитора и камеры, систему инерциальной навигации подключают к персональному компьютеру, осуществляют первоначальную калибровку системы инерциальной навигации для определения начальных значений датчиков, с помощью инерциального измерительного модуля передают данные на микроконтроллер, который их обрабатывает и передает данные на компьютер в следующих форматах:
ускорение по оси X, мм/с2;
ускорение по оси Y, мм/с2;
ускорение по оси Z, мм/с2;
изменение угла относительно оси X, градус/сек;
изменение угла относительно оси Y, градус/сек;
изменение угла относительно оси Z, градус/сек;
индукция магнитного поля по оси X, мкТл;
индукция магнитного поля по оси Y, мкТл;
индукция магнитного поля по оси Z, мкТл;
параметр X кватерниона;
параметр Y кватерниона;
параметр Z кватерниона;
параметр W кватерниона;
на мониторе компьютера пациенту предъявляют проекцию тангенциальной сетки, расположенную на уровне глаз пациента, на сетке по таблице Брадиса отмечены окружности, соответствующие отметкам 5, 10, 15 и 20°, радиально по круговой шкале нанесены меридианы от 0 до 360°, в центре сетки располагают точку красного цвета, пациент фиксирует взглядом точку, расположенную в центре экрана, при наличии диплопии он видит две точки; затем пациент медленно поворачивает голову в направлении, указанным врачом, по девяти диагностическим позициям до момента нахождения такого положения головы, при котором нет диплопии, то есть он видит одну точку; врач фиксирует, над меткой какого цвета находится наиболее выступающая точка подбородка пациента в момент остановки движения головы, чем дальше от края плеча остановилась голова пациента, тем меньше степень выраженности тортиколлиса; с помощью устройства регистрируют положение головы в трех плоскостях, при котором нет диплопии, и определяют величину тортиколлиса в градусах для каждого положения головы; информацию передают в базу данных компьютерной программы; определение положения головы, при котором пациент видит одну точку, является критерием оценки динамики лечения пациента;
диагностические позиции для определения величины тортиколлиса:
- положение головы влево/вниз, взгляд при этом направлен вправо/вверх;
- взгляд на метку «исподлобья»;
- положение головы вправо, взгляд при этом направлен вверх/влево;
- положение головы влево, взгляд при этом направлен вправо;
- центральное положение головы, взгляд прямо перед собой;
- положение головы вправо, взгляд при этом направлен влево;
- голова поднята и повернута влево, взгляд направлен вниз/вправо;
- голова поднята в центральном положении, взгляд направлен вниз;
- голова поднята и повернута вправо, взгляд направлен вниз/влево;
к исследованию в каждой последующей позиции переходят после того, как координаты предыдущей точки занесены в базу данных программы; в каждой позиции фиксируют изменения положения системы инерциальной навигации; для определения величины тортиколлиса рассчитывают изменения положения головы с использованием системы инерциальной навигации на основе преобразования кватерниона поворота, а также с учетом показаний акселерометра, магнитометра и гироскопа, и полученные сдвиги прибавляют к предыдущему положению.
| Способ исследования диплопии | 2022 |
|
RU2797923C1 |
| Способ диагностики косоглазия методом видеоокулографии | 2021 |
|
RU2767704C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИМЕРНЫХ АЦЕТАЛЕЙ | 0 |
|
SU197165A1 |
| Способ дифференциальной диагностики тремора головы и верхних конечностей | 2016 |
|
RU2642984C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОЛИТИЧЕСКОГО НАГРЕВАНИЯ | 1928 |
|
SU12410A1 |

