ОБЛАСТЬ ТЕХНИКИ
[01] Изобретение относится к области информационных технологий и вычислительной техники, а более конкретно к устройствам ввода информации и передачи движений человека в виртуальное трехмерное пространство, изображаемое на экране монитора или отображаемого шлемами виртуальной реальности, или к управлению устройствами, включая механизированные и роботизированные устройства.
УРОВЕНЬ ТЕХНИКИ
[02] На сегодняшний день известны различные системы регистрации/захвата движения, включая датчики регистрации движения, например, различные оптические системы захвата движения, например, движения тела человека (пользователя), включая системы захвата движения мелкой моторики рук. Однако подобные системы регистрации (захвата) движения и положения обладают определенными недостатками, в том числе, к таким недостаткам можно отнести необходимость позиционирования рук пользователя в области действия таких датчиков (непосредственно перед датчиками), которая, как правило, ограничена областью, расположенной перед лицом пользователя и крайне ограничена. Подобные ограничения заставляют пользователя совершать неестественные движения, перемещения частей тела и т.д. на протяжении длительного периода взаимодействия с подобными системами захвата, а также лишают пользователя возможности повернуться в компьютерной игре (или при управлении механизированным или роботизированным устройствами) всем корпусом (за исключением использования предопределенных жестов, регистрируемых системами захвата, и/или посредством использования дополнительных устройств, способных регистрировать движения пользователя в дополнение к используемым системам захвата движения), что зачастую вызывает дискомфорт при взаимодействии пользователя с использующимися в настоящее время системами захвата движения, что, в свою очередь, затрудняет взаимодействие пользователя с целевыми объектами, например, объектами виртуальной реальности (что приводит, например, к снижению степени восприятия пользователем эффекта погружения в виртуальное пространство), объектами реального окружающего мира, в частности, управляемыми системами взаимодействия с реальным миром посредством системы захвата движения, например, к таким системам взаимодействия можно отнести автомобили, роботизированные устройства, в частности роботы, различного рода манипуляторы и т.д.
[03] Также, в существующих в настоящее время системах захвата движения, используемых, например, для взаимодействия пользователя с системами виртуальной реальности, как правило, не задействованы ноги пользователя, т.е. не используются системы, способные осуществлять захват движения ног пользователя с целью передачи их движения в компьютерные системы, связанные с виртуальной реальностью.
[04] Соответственно, основываясь на анализе существующего уровня техники и возможностей, существует потребность в данной области техники в системе и способе для захвата движений и положения тела человека и частей тела человека. Результат настоящего технического решения заключается в повышении эффективности и точности захвата/регистрации движений и положений тела человека и частей тела человека, по крайней мере, за счет подсистемы для регистрации положения и перемещения верхних конечностей пользователя в пространстве, на которой установлен, по крайней мере, один датчик, позволяющий регистрировать изменение угла отклонения составных элементов данной подсистемы относительно друг друга, и за счет подсистемы для регистрации положения и перемещения нижних конечностей пользователя в пространстве.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[05] Технический результат настоящего изобретения заключается в повышении эффективности и точности захвата/регистрации движений и положений тела человека и частей тела человека и в повышении эффективности и точности управления объектами посредством, по крайней мере, подсистемы для регистрации положения и перемещения верхних конечностей пользователя в пространстве, на которой установлен, по крайней мере, один датчик, позволяющий регистрировать изменение угла отклонения составных элементов данной подсистемы относительно друг друга, и за счет подсистемы для регистрации положения и перемещения нижних конечностей пользователя в пространстве. Настоящий результат достигается путем использования системы для захвата движений и положения тела человека и частей тела человека, связанной с вычислительным устройством и включающей подсистему для регистрации положения и перемещения верхних конечностей пользователя в пространстве, на которой установлен, по крайней мере, один датчик, позволяющий регистрировать изменение угла отклонения составных элементов данной подсистемы относительно друг друга, причем составные элементы данной подсистемы состоят из плеча подсистемы, предплечья подсистемы, кисти подсистемы, моделирующими соответствующие части верхних конечностей пользователя; подсистему для регистрации положения и перемещения нижних конечностей пользователя в пространстве, обладающей, по крайней мере, четырьмя поверхностями нажатия, позволяющими регистрировать отклонения данной подсистемы от вертикальной оси, и, по крайней мере, одну поверхность нажатия для регистрации перемещения данной подсистемы по вертикальной оси; подсистему для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве, оснащенную, по крайней мере, одним датчиком угла поворота, позволяющим регистрировать изменение угла вращения тела пользователя вокруг вертикальной оси; блок управления системы, к которому подключена, по крайней мере, одна упомянутая подсистема, и который подключен к вычислительному устройству, причем блок управления, получает данные, по крайней мере, с одной из упомянутых подсистем и/или, по крайней мере, с одного упомянутого датчика, и/или, по крайней мере, с одного устройства, подключаемого к системе для захвата движений и положения тела человека и частей тела человека, и передает на вычислительное устройство, и/или получает данные с вычислительного устройства и передает данные, по крайней мере, одной упомянутой подсистеме, и/или, по крайней мере, одному упомянутому датчику, и/или, по крайней мере, одному устройству, подключаемому к системе для захвата движений и положения тела человека и частей тела человека.
[06] В одном из частных вариантов реализации система дополнительно включает, по крайней мере, одно устройство ввода, связанное с блоком управления системы и/или вычислительным устройством.
[07] В одном из частных вариантов реализации система дополнительно включает устройство для полного или частичного погружения в виртуальную и/или дополненную реальность управляемую вычислительным устройством.
[08] В одном из частных вариантов блок управления системы подключен к вычислительному устройству посредством беспроводного интерфейса и/или посредством проводного интерфейса.
[09] В одном из частных вариантов, по крайней мере, один упомянутый датчик реализован датчиком движения и/или датчиком объема, и/или оптическим датчиком, и/или механическим датчиком, и/или магнитным датчиком, и/или энкодером, и/или МЭМС-датчиком, и/или акселерометром, и/или гироскопом, и/или магнетометром.
[010] В одном из частных вариантов, по крайней мере, два упомянутых составных элемента подсистемы регистрации положения и перемещения верхних конечностей пользователя в пространстве соединены шарнирами, моделирующими плечевой, и/или локтевой, и/или лучезапястный суставы человека, соответственно.
[011] В одном из частных вариантов, по крайней мере, один упомянутый шарнир реализован, по крайней мере, одним сферическим шарниром или, по крайней мере одним цилиндрическим шарниром.
[012] В одном из частных вариантов система дополнительно включает подсистему для регистрации положения и перемещения пальцев пользователя в пространстве.
[013] В одном из частных вариантов, по крайней мере, одна из упомянутых подсистем зафиксирована на теле пользователя и/или крепится, по крайней мере, к одной другой из упомянутых подсистем.
[014] В одном из частных вариантов подсистема для регистрации положения и перемещения нижних конечностей пользователя в пространстве использует, по крайней мере, один датчик отслеживания положения и перемещения, по крайней мере, одной нижней конечности пользователя.
[015] В одном из частных вариантов подсистема для регистрации положения и перемещения тела и частей тела пользователя в пространстве оборудована, по крайней мере, одним датчиком, позволяющим отслеживать отклонение, по крайней мере, одной части тела пользователя от вертикальной оси.
[016] В одном из частных вариантов подсистема для регистрации положения и перемещения тела и частей тела пользователя в пространстве реализована креслом.
[017] В одном из частных вариантов, по крайней мере, одна упомянутая подсистема обеспечивает обратную связь с пользователем посредством, по крайней мере, одного установленного на ней датчика и/или посредством, по крайней мере, одной подсистемы воздействия на пользователя.
[018] Согласно другому варианту реализации предлагается система для захвата движений и положения тела человека и частей тела человека, связанная с вычислительным устройством и включающая подсистему для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве, оснащенную, по крайней мере, одним датчиком, позволяющим регистрировать изменение положения и перемещения пользователя и/или, по крайней мере, одной части тела пользователя в пространстве; подсистему для регистрации положения и перемещения верхних конечностей пользователя в пространстве, на которой установлен, по крайней мере, один датчик, позволяющий регистрировать изменение угла отклонения составных элементов данной подсистемы относительно друг друга, причем элементы данной подсистемы состоят из плеча подсистемы, предплечья подсистемы, кисти подсистемы, моделирующими соответствующие части верхних конечностей пользователя; подсистему для регистрации положения и перемещения нижних конечностей пользователя в пространстве; блок управления системы, к которому подключена, по крайней мере, одна упомянутая подсистема, и который подключен к вычислительному устройству, причем блок управления получает данные, по крайней мере, с одной из упомянутых подсистем и/или, по крайней мере, с одного упомянутого датчика, и/или, по крайней мере, с одного устройства, подключаемого к системе для захвата движений и положения тела человека и частей тела человека, и передает на вычислительное устройство, и/или получает данные с вычислительного устройства и передает данные, по крайней мере, одной упомянутой подсистеме, и/или, по крайней мере, одному упомянутому датчику, и/или, по крайней мере, одному устройству, подключаемому к системе для захвата движений и положения тела человека и частей тела человека; причем, по крайней мере, одна из упомянутых подсистем закреплена на теле пользователя и/или крепится, по крайней мере, к одной другой из упомянутых подсистем.
[019] В одном из частных вариантов подсистема для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве реализована датчиками.
[020] В одном из частных вариантов подсистема для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве реализована предметами, закрепленными на пользователе.
[021] В одном из частных вариантов, по крайней мере, одна из упомянутых подсистем зафиксирована на теле пользователя и/или крепится, по крайней мере, к одной другой из упомянутых подсистем.
[022] В одном из частных вариантов система дополнительно включает, по крайней мере, одно устройство ввода, связанное с блоком управления системы и/или вычислительным устройством.
[023] В одном из частных вариантов система дополнительно включает устройство для полного или частичного погружения в виртуальную и/или дополненную реальность, управляемое вычислительным устройством.
[024] В одном из частных вариантов блок управления системы подключен к вычислительному устройству посредством беспроводного интерфейса и/или посредством проводного интерфейса.
[025] В одном из частных вариантов, по крайней мере, один упомянутый датчик реализован датчиком движения и/или датчиком объема, и/или оптическим датчиком, и/или механическим датчиком, и/или магнитным датчиком, и/или энкодером, и/или МЭМС-датчиком, и/или акселерометром, и/или гироскопом, и/или магнетометром.
[026] В одном из частных вариантов система дополнительно включает подсистему для регистрации положения и перемещения пальцев пользователя в пространстве.
[027] В одном из частных вариантов, по крайней мере, одна упомянутая подсистема обеспечивает обратную связь с пользователем посредством, по крайней мере, одного установленного на ней датчика и/или посредством, по крайней мере, одной подсистемы воздействия на пользователя.
[028] В одном из частных вариантов упомянутая подсистема воздействия реализована электромотором и/или вибромотором, и/или температурным устройством, и/или устройством, способным оказывать давление на тело и/или, по крайней мере, один участок тела пользователя и/или оказывать сопротивление, по крайней мере, одному действию пользователя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[029] Дополнительные цели, признаки и преимущества настоящего изобретения будут очевидными из прочтения последующего описания осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
[030] ФИГ. 1 иллюстрирует примерную систему реализации настоящего изобретения;
[031] ФИГ. 2 иллюстрирует примерный вариант подсистемы для захвата положения и движения верхних конечностей (рук) пользователя;
[032] ФИГ. 3 иллюстрирует кинематическую модель верхней конечности человека и примерный вариант соответствующих ей схематично изображенных частей подсистемы для захвата положения и движения рук пользователя;
[033] ФИГ. 4 иллюстрирует объем движений в плечевом суставе;
[034] ФИГ. 5 иллюстрирует объем движений в локтевом суставе;
[035] ФИГ. 6 иллюстрирует объем движений в лучезапястном суставе;
[036] ФИГ. 7 иллюстрирует примерный вариант подсистемы для захвата положения и движения нижних конечностей (ног) пользователя;
[037] ФИГ. 8 иллюстрирует примерный вариант подсистемы для захвата положения и движения тела и/или частей тела пользователя;
[038] ФИГ. 9 иллюстрирует примерный вариант устройств ввода системы, описываемой в рамках настоящего изобретения;
[039] ФИГ. 10 иллюстрирует примерный вариант структурной схемы системы, описываемой в рамках настоящего изобретения;
[040] ФИГ. 11 иллюстрирует примерный вариант системы, реализующий настоящее изобретение;
[041] ФИГ. 12 иллюстрирует примерные варианты размещения датчиков угла поворота, описываемых в рамках настоящего изобретения.
[042] ФИГ. 13 иллюстрирует примерный вариант крепления камеры к подсистеме для захвата положения и движения рук пользователя.
[043] ФИГ. 14 иллюстрирует примерные варианты реализации локтевого сустава согласно настоящему изобретению.
[044] ФИГ. 15 иллюстрирует примерные варианты реализации плечевого сустава согласно настоящему изобретению.
[045] ФИГ. 16 иллюстрирует примерный вариант реализации лучезапястного сустава согласно настоящему изобретению.
[046] ФИГ. 17 иллюстрирует примерный вариант реализации подсистемы для захвата положения и движения верхних конечностей пользователя с использованием примерных вариантов, изображенных на ФИГ. 14-16, согласно настоящему изобретению.
[047] ФИГ. 18 иллюстрирует пример компьютерной системы общего назначения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[048] Объекты и признаки настоящего изобретения, способы для достижения этих объектов и признаков станут очевидными посредством отсылки к примерным вариантам осуществления. Однако настоящее изобретение не ограничивается примерными вариантами осуществления, раскрытыми ниже, она может воплощаться в различных видах. Сущность, приведенная в описании, является ничем иным, как конкретными деталями, обеспеченными для помощи специалисту в области техники в исчерпывающем понимании изобретения, и настоящее изобретение определяется только в объеме приложенной формулы.
[049] Описываемая в рамках настоящего изобретения система позволяет управлять виртуальным персонажем/героем (персонажем виртуальной реальности, компьютерной игры и т.д.), удаленным механизмом (в частности, роботизированным), как с помощью изменения положения рук, ног, головы, так и тела пользователя, позволяя пользователю управлять удаленными механизмами или виртуальным персонажем с максимальным эффектом присутствия и реалистичностью, создавая при этом полноценные ощущения взаимодействия с виртуальной реальностью. Описываемая в настоящем изобретении система предоставляет пользователю дополнительные возможности, такие как возможность поворота пользователя на 360 градусов, возможность динамического изменения положения тела пользователя, а также тактильный отклик, что увеличивает эффект взаимодействия пользователя с виртуальной реальностью и/или при управлении.
[050] Также описываемая в рамках настоящего изобретения система лишена необходимости нахождения/расположения/размещения рук (и других частей тела) пользователя непосредственно перед датчиками, регистрирующими положение частей тела пользователя, поскольку слежение за положением головы пользователя в пространстве может осуществляться, например, посредством составных элементов шлема виртуальной реальности (который может использоваться совместно с системой, описываемой в рамках настоящего изобретения, например, для отслеживания положения и движения головы пользователя и/или для визуализации изображения пользователю, например, действий виртуального персонажа компьютерной игры), различными датчиками, способными регистрировать положение головы пользователя, например, датчиками движения, гироскопами, датчиками магнитного поля, в частности, закрепленными на голове пользователя, а регистрация положения и перемещения остальных частей тела пользователя может осуществляться посредством элементов системы, описываемой в рамках настоящего изобретения. Таким образом, движение головы и движение остальных частей тела пользователя могут осуществляться пользователем и регистрироваться элементами описываемой системы независимо друг от друга (от их относительного положения).
[051] Описываемая в рамках настоящего изобретения система для захвата/регистрирования/регистрации движений/положения тела и/или отдельных частей тела пользователя может состоять из нескольких подсистем (элементов системы/модулей системы, описываемой в рамках настоящего изобретения): подсистемы/элемента для захвата положения и движения рук пользователя (подсистема/элемент для захвата движений рук), подсистемы/элемента для захвата положения и движения ног пользователя (подсистема/элемент для захвата движений ног), подсистемы/элемента для захвата положения и движения тела пользователя (подсистема/элемент для захвата положения тела), которые описаны далее.
[052] Описываемая в рамках настоящего изобретения система обеспечивает высокий уровень синхронизации действий пользователя в реальности (в реальном мире, в котором находится пользователь) и, например, в виртуальной реальности посредством обеспечиваемой точности позиционирования частей тела пользователя и минимального времени отклика подсистем захвата движений пользователя, что, в частности, позволяет свести к минимуму сенсорный диссонанс и неприятный эффект головокружения при перемещении в виртуальном пространстве, например, при использовании шлемов виртуальной реальности.
[053] На ФИГ. 1 показан примерный вариант системы, описываемый в рамках настоящего изобретения. Примерный, вариант системы, изображенной на ФИГ. 1, может включать подсистему для захвата положения и движения рук пользователя 110, подсистему для захвата положения и движения ног пользователя 120, подсистему для захвата положения и движения тела пользователя 130.
[054] Стоит отметить, что в частном случае подсистема для захвата положения и движения ног пользователя 120 может быть реализована педалями-браслетами (причем, может быть выполнена в любом форм-факторе, например, в виде полусфер, различного вида/типа обуви, педалей механизмов, машин и инструментов и т.д., как описано ниже) и/или механической системой/устройством захвата движений (МСЗД) (например, схожей по принципу строения или повторяющей принцип (строения) и/или содержания (в частности составных частей/элементов), и/или принципу функционирования описанной в данном изобретении подсистемы для захвата положения и движения рук или по схожему принципу, причем подсистемы для захвата положения и движения рук с целью ее использования для захвата положения и движения ног может быть изменена и/или иметь конструктивные особенности согласно физиологическому отличию руки от ноги человека), т.е. может соответствовать кинематической модели костного аппарата ноги человека, причем может иметь, по крайней мере, три степени свободы, соответствующих трем независимым вращениям в следующих суставах: одному - в тазобедренном суставе, одному - в коленном суставе и одному - в голеностопном суставе. Биомеханическая модель костного аппарата ноги человека, может состоять, по крайней мере, из трех твердых тел (бедро подсистемы, голень подсистемы, стопа подсистемы), соединенных шарнирами (в частном случае - идеальными шарнирами), моделирующими тазобедренный сустав, коленный сустав и голеностопный сустав нижних конечностей (ног) человека. Таким образом, описываемая в рамках настоящего изобретения система может включать две подсистемы - подсистему для захвата положения и движения рук и подсистему для захвата положения и движения ног (в частности, реализованной по принципу подсистемы для захвата положения и движения рук), например, реализованных каждая в виде отдельных механических систем/устройств захвата движений (МСЗД) или в качестве (в виде) единой механической системы/устройства захвата движений (МСЗД).
[055] Стоит также отметить, что как минимум одна из описываемых в рамках настоящего изобретения подсистема может крепиться (в частном случае, фиксироваться) к телу пользователя или как минимум к одной описываемой подсистеме посредством как минимум, одного существующего или изобретенного позднее способа крепления или элемента крепления (например, скобой, «липучками», ремнями, различными видами захватов, зажимов, болтами, винтами и т.д.), в частности механизмами крепления, связывающим креплением, и/или одного шарнира, описываемого в рамках настоящего изобретения.
[056] Также, подсистема 110 может крепиться к подсистеме 130. например, в местах крепления, расположенных в частном случае на подсистеме 130 или на любой составной части подсистемы 130 (например, на спинке кресла, если подсистема 130 выполнена в виде кресла, либо на детали кресла, например, предназначенной для крепления подсистемы 110), причем один из вариантов крепления 112 может включать, по крайней мере, один шарнир 114 (любого известного типа, например, выполненный в виде сферического шарнира), как описано далее, что, в частном случае, позволяет пользователю совершать наклоны влево-вправо и/или вперед-назад, в частности, совершать пользователем глубокий наклон вперед. Стоит также отметить, что, по крайней мере, один из вариантов крепления 112 подсистемы 110 может включать составную часть, неподвижную относительно подсистемы 130, в частном случае закрепленную и/или зафиксированную на подсистеме 130, например, винтами, болтами, посредством системы пазов и т.д. Также, подсистема 110 может крепиться к телу пользователя (фиксироваться на теле пользователя) или, по крайней мере, к одной части тела пользователя системы, описываемой в рамках настоящего изобретения.
[057] Также, подсистема для захвата положения и движения тела и/или частей тела пользователя в пространстве может быть представлена/реализована предметом/объектом, закрепляемым на теле пользователя (в частном случае реализованным элементом одежды пользователя, например, жилеткой, футболкой, пиджаком, брюками и т.д., причем такие элементы одежды могут быть изготовлены из прочных материалов, или иметь вставки, в частности, из пластика или металла, позволяющие удерживать подсистемы, описываемые в рамках настоящего изобретения или их составные элементы, включая крепления таких подсистем), причем к такому объекту может крепиться как минимум одна описываемая в рамках настоящего изобретения подсистема, в частности подсистема захвата положения тела и/или подсистема захвата положения ног, например, посредством как минимум одного существующего или изобретенного позднее способа крепления или элемента крепления (например, скобой, «липучками», ремнями, различными видами захватов, зажимов, болтами, винтами и т.д.), в частности механизмами крепления, связывающим креплением, и/или одного шарнира, описываемого в рамках настоящего изобретения. Также стоит отметить, что подсистема для захвата положения и движения тела и/или частей тела пользователя в пространстве может быть реализована только датчиками, описываемыми в рамках настоящего изобретения, закрепленными на теле пользователя, либо на подсистеме для захвата положения и движения нижних конечностей (ног) пользователя и/или на подсистеме для захвата положения и движения верхних конечностей (рук) пользователя или элементах таких подсистем, причем такие датчики предназначены для захвата/регистрации положения и движения тела пользователя и/или отдельных частей тела пользователя, в частности, как описывается в рамках настоящего изобретения.
[058] Стоит отметить, что система, описываемая в рамках настоящего изобретения, не обязательно включает подсистему для захвата положения и движения тела пользователя, а может быть реализована (может использовать), по крайней мере, одной подсистемой, например, подсистемой для захвата положения и движения верхних конечностей пользователя или совокупностью подсистемы для захвата положения и движения верхних конечностей пользователя и подсистемы для захвата положения и движения нижних конечностей пользователя, в частном, случае закрепленных друг с другом либо на теле пользователя.
[059] Описываемая в рамках настоящего изобретения система может включать блок управления системы/блок управления системой 155, который будет описан далее, выполненный в виде отдельного устройства либо в виде части описываемой системы, либо в виде, по крайней мере, одной части, по крайней мере, одной из описываемых в рамках настоящего изобретения подсистемы, либо в виде электронной платы, например, в виде одной из компьютерных комплектующих, в частности, устанавливаемых в электронное устройство/вычислительное устройство (1120, ФИГ. 11), например, персональный компьютер. Блок управления системы 155 (например, электронный блок управления) используется для регистрации и управления, по крайней мере, одной подсистемой или элементами подсистемы, описываемых в рамках настоящего изобретения, как будет описано ниже.
[060] Стоит отметить, что описываемая в рамках настоящего изобретения система может использоваться для передачи движений человека в виртуальное трехмерное пространство, для удаленного управления различными устройствами, например манипуляторами, роботизированными платформами и т.д.
[061] Описываемая в рамках настоящего изобретения система может включать дополнительные подсистемы/элементы системы (1112, ФИГ. 11), например, реализованные в виде отдельных устройств, или набора устройств, связанных с элементами описываемой системы), в частности, элемент системы/подсистему визуализации изображения, в частности, дисплей (1140, ФИГ. 11), контроллеры/системы управления (1145, ФИГ. 11), камеры (1135, ФИГ. 11), например, веб-камеры, устройства (1130, ФИГ. 11) для полного или частичного погружения в виртуальную или дополненную реальность, например, создающее, по крайней мере, зрительный эффект присутствия в пространстве, управляемом вычислительным устройством, в частности, шлем виртуальной реальности или Microsoft HoloLens и т.д., различные манипуляторы (1142, ФИГ. 11), включая различные роботизированные устройства, технику и т.д., причем такие дополнительные подсистемы/элементы могут расширять функционал описываемой системы посредством использования описываемой системой функциональных возможностей дополнительных подсистем/элементов системы, реализуемых составными элементами дополнительных подсистем/элементов системы и/или программными компонентами таких подсистем. Стоит отметить, что на вычислительном устройстве, к которому может быть подключена описываемая система, может быть установлено программное обеспечение, способное перехватывать/обрабатывать данные с описываемых подсистем, например, с целью отслеживания положения головы пользователя, использующего, например, шлем виртуальной реальности и т.д., например, как описано ниже. Упомянутыми выше дополнительными подсистемами могут являться системы видеозаписи, различные регистраторы, датчики (1130, ФИГ. 1114), включая описанные далее датчики устройств ввода, датчики регистрации нажатия педалей-браслетов (1080, 1030а, 1030б, ФИГ. 10) и другие системы и устройства, способные регистрировать изменение внешней среды по отношению к пользователю, а также регистрировать различные характеристики/показатели пользователя (тела человека/пользователя), цифровых устройств тем или иным способом связанных с пользователем, например, показатели персонального компьютера, в которому подключена описываемая в рамках настоящего изобретения система, и другие типы датчиков, регистраторов. Причем такие дополнительные подсистемы могут быть внешними по отношению к описываемой в рамках настоящего изобретения системы, так и являться ее частью, например являться частью, по крайней мере, одной из описываемых в рамках настоящего изобретения подсистем/модулей/элементов системы.
[062] Стоит также отметить, что дополнительные подсистемы могут включать подсистемы воздействия (1150, ФИГ. 11), подсистемы способные тем или иным способом воздействовать/влиять на пользователя, его поведение, параметры тела пользователя, умственной деятельности пользователя и т.д. К таким видам подсистем воздействия на пользователя могут относиться устройства с обратной связью, например, позволяющей создавать усилия, противодействующие действиям пользователя (в частности, затрудняющей перемещение и вращение конечностей и частей тела пользователя), либо создавать воздействия типа вибрации, тряски и другие виды воздействия на тело пользователя. Причем такие подсистемы воздействия могут быть как внешними по отношению к описываемой в рамках настоящего изобретения системы, так и являться ее частью, например являться частью, по крайней мере, одной из описываемых в рамках настоящего изобретения подсистем/модулей/элементов системы.
[063] Стоит отметить, что подсистемы воздействия способны оказывать усилие на элементы описываемой системы (в частности, на элементы подсистемы 110), например, обеспечиваемое электромоторами (вибромоторами и т.д.). Таким образом, у пользователя создается впечатление, что он (реально) взаимодействует с объектами различного рода, в частности, с предметами/объектами виртуальной реальности (либо объектами окружающего мира, управляемыми механизмами и их элементами и т.д.). Так, например, пользователь может держать в руке виртуальный пистолет, а электромоторы способны обеспечить пропорциональное силе тяжести воздействие на руку, какое бы оказывалось воздействие на руку пользователя в реальном мире. Таким образом, посредством использования подсистем воздействия у пользователя может быть создано впечатление/ощущение, что виртуальный пистолет имеет массу.
[064] Также стоит отметить, что система воздействия может получать команды от программного обеспечения, установленного на вычислительном устройстве, например, персональном компьютере, с которым связана описываемая система, либо такие подсистемы могут получать команду и инструкции от блока управления, который будет описан далее, или от других подсистем описываемой в рамках настоящего изобретения системы, например, подсистемы захвата положения и движения рук пользователя (подсистема 110, ФИГ. 1). Стоит также отметить, что подсистемы воздействия могут включать различного рода датчики, например, датчики движения, датчики объема, датчики температуры, различные оптические и/или механические датчики и т.д. (или использовать датчики описываемых в рамках настоящего изобретения подсистем), например, позволяющие регистрировать действия пользователя. Примером подсистем воздействия могут являться, например, джойстики и рули с обратной связью, а также различные устройства, например, оснащенные вибромоторами, системами оказания давления/усилия на части тела пользователя (например, различные пневматические и/или механические устройства), температурные устройства (нагреватели, охладители) и т.д.
[065] На ФИГ. 2 продемонстрирован примерный вариант подсистемы для захвата положения и движения рук пользователя 110.
[066] Биомеханическая модель костного аппарата руки человека, может состоять, по крайней мере, из трех твердых тел (плечо 235 подсистемы 110, предплечье 245 подсистемы 110, кисть 255 подсистемы 110), соединенных шарнирами (в частном случае - идеальными шарнирами), моделирующими плечевой сустав (330, ФИГ. 3), локтевой сустав (340, ФИГ. 3) и лучезапястный сустав (350, ФИГ. 3) верхних конечностей (рук) человека. Такое приближение справедливо для подавляющего большинства движений рук человека/пользователя. Подсистема для захвата положения и движения рук пользователя 110 может быть выполнена в виде механической системы/устройства захвата движений (МСЗД), частный вариант реализации которой изображен на ФИГ. 1, и соответствует кинематической модели костного аппарата руки человека, не включающей пальцы, и имеет как минимум три степени свободы, соответствующих трем независимым движениям в следующих суставах: одному - в плечевом суставе, одному - в локтевом суставе и одному - в лучезапястном суставе. Хотя на ФИГ. 1 не показана системы захвата положения и движения пальцев рук пользователя в пространстве, стоит отметить, что подсистема 110 может включать приспособления или устройства для отслеживания положения и движения пальцев рук пользователя (включая отслеживание положение и движение фаланг пальцев, взаимное расположение пальцев рук пользователя и т.д.). В качестве таких устройств, механизмов, систем отслеживания движения и положения пальцев рук пользователя могут использоваться различные контроллеры (например, 3D контроллеры, 3D мыши и т.д.), перчатки виртуальной реальности, оптические устройства, которые могут использоваться для отслеживания положения и движения пальцев рук пользователя и являться устройствами ввода, например, различными компьютерными манипуляторами (или являться таковыми, или совмещать функционал регистрации движения и ввода данных), и другими устройствами, способными отслеживать положение и перемещение/движение пальцев рук пользователя, причем такие устройства отслеживания пальцев рук пользователя могут являться составной частью системы, описываемой в рамках настоящего изобретения, или подключаться к описываемой системе.
[067] Стоит отметить, что упомянутые регистраторы движения и перемещения пальцев рук пользователя могут включать функционал манипуляторов, например, клавиши/кнопки, сенсорные панели, либо любые другие устройства ввода и/или элементы устройств ввода (ввода данных). Причем устройства регистрации и ввода могут являться частью, по крайней мере, одной из описываемых подсистем системы, описываемой в рамках настоящего изобретения.
[068] Стоит также отметить, что предельные углы отклонения в указанных выше суставах подсистемы 110 (реализованных, например, посредством шарниров различного типа, как описано далее) могут быть определены, например, исходя из усредненных данных указанных в анатомической литературе, с определенным запасом, например запасом в 10%.
[069] Крепления 220 подсистемы 110 могут быть выполнены в виде универсальных креплений с целью обеспечить возможность пользоваться изделием пользователям различного роста и веса, в частном случае - пользователю с ростом от 150 см до 200 см и весом от 40 кг до 120 кг. Крепление плечевых суставов подсистемы 110, описанных далее, в частности, к подсистеме для захвата положения и движения тела пользователя и/или к телу пользователя (в частности, к элементам, размещенным на теле пользователя или закрепленном на теле пользователя, реализованным, например, в виде корсета, одеваемого на пользователя, либо костюма или, по крайней мере, одного элемента одежды пользователя, либо любого другого, по крайней мере, одного элемента подсистемы для захвата положения и движения тела пользователя) и/или к подсистеме для захвата положения и движения нижних конечностей (ног) пользователя может осуществляться, например, рычажно-шарнирным способом (как показано на ФИГ. 1), что способно позволить пользователю описываемой системы привставать (с кресла, если подсистема реализована в виде кресла, как описано далее) и/или делать глубокий наклон корпуса вперед. Также, способ крепления плечевых суставов 110 или, по крайней мере, одной части системы, описываемой в рамках настоящего изобретения, может включать способ крепления плечевых суставов 110 посредством самого шарнира (например, составной частью шарнира).
[070] Примерные зависимости длины руки человека от плеча до запястья в зависимости от роста представлены ниже:

[071] Плечевой сустав 230 подсистемы 110 может быть смоделирован, по крайней мере, одним шарниром (любым видом шарнира), имеющим, по крайней мере, одну степень свободы, например, по крайней мере, одним цилиндрическим шарниром, или по крайней мере, одним шаровым шарниром (сферическим шарниром), в частности, обладающим тремя степенями свободы, как показано на ФИГ. 3. Шарнир способен осуществлять произвольные вращения плеча относительно центра плечевого сустава 230, которые могут быть описаны любым способом изменений ориентации твердого тела при движении такого твердого тела вокруг неподвижной точки, например, могут быть описаны тремя углами Эйлера или углами вращений около фиксированных осей, связанных с телом человека/пользователя. Подсистема 110 способна обеспечивать и отслеживать поворот плеча 235, по крайней мере, в вертикальной фронтальной плоскости как минимум на 360 градусов (плоскость x-z, ФИГ. 3).
[072] Подсистема 110 способна отслеживать поворот плеча пользователя (335, ФИГ. 3) и, следовательно, поворот плеча 235 подсистемы 110, по крайней мере, в вертикальной плоскости перпендикулярной к фронтальной как минимум на 244 градусов от вертикали (плоскость y-z, ФИГ. 3).
[073] Подсистема 110 способна отслеживать поворот плеча пользователя (335, ФИГ. 3) и, следовательно, поворот плеча 235 подсистемы 110, по крайней мере, в горизонтальной плоскости как минимум на 150 градусов и -50 градусов (минус 50 градусов), т.е., по крайней мере, 200 градусов в плоскости x-y (ФИГ. 3).
[074] Локтевой сустав (340, ФИГ. 3) может быть смоделирован шарниром 240, по крайней мере, с двумя степенями свободы, соответствующими углу наклона предплечья (345, реализованной в виде предплечья 245 подсистемы 110, ФИГ. 3) относительно плеча (335, реализованной в виде плеча 235 подсистемы 110, ФИГ. 3) и вращению лучевой кости (347, ФИГ. 3) предплечья относительно локтевой кости (349, ФИГ. 3), как продемонстрировано на ФИГ. 5. Вращение лучевой кости предплечья относительно локтевой кости предплечья, в частном случае, может не учитываться, поскольку незначительно влияет (или не влияет совсем) на ориентацию руки пользователя в целом. Таким образом, локтевой сустав в подсистеме 110 может быть реализован, по крайней мере, одним шарниром (любым видом шарнира, например, одним из упомянутых в рамках настоящего изобретения) 240, в частности, по крайней мере, одним сферическим шарниром, либо, по крайней мере, одним цилиндрическим шарниром и т.д., т.е. шарниром обладающим, по крайней мере, одной степенью свободы и способным, в частном случае, обеспечить сгибание и разгибание руки пользователя, по крайней мере, в одной плоскости движения предплечья, в частном случае, в пределах, по крайней мере, 165 градусов.
[075] Соединение между предплечьем 345 (ФИГ. 3) и кистью 355 (ФИГ. 355), представляющее собой лучезапястный сустав (350 на ФИГ. 3), реализованный, по крайней мере, одним шарниром 250 (любым видом шарнира, например, одним из упомянутых в рамках настоящего изобретения, в частности, по крайней мере, одним сферическим шарниром, либо, по крайней мере, одним цилиндрическим шарниром и т.д., т.е. шарниром обладающим, по крайней мере, одной степенью свободы) подсистемы 110 системы, описываемой в рамках настоящего изобретения, само по себе обладает двумя видами подвижности (ФИГ. 6): вверх-вниз, по крайней мере, на 170 градусов и вправо-влево, по крайней мере, на 60 градусов. Эти два направления подвижности кисти в сочетании с третьим - пронацией и супинацией кисти - равносильны тому, как если бы кисть была подвешена к руке на втором шаровом шарнире (следующим за плечелопаточным/плечевым шарниром/суставом).
[076] В частном случае настоящего изобретения, когда описываемая система не включает системы, механизмы, устройства и/или системы для отслеживания положения и перемещения пальцев рук пользователя, образ кисти руки пользователя может регистрироваться (например, подсистемой 110, в частности, датчиками подсистемы, и/или другими подсистемами регистрации положения и перемещения кисти пользователя, описываемыми в раках настоящего изобретения) и передаваться, например, в блок управления системы 155 и/или цифровое устройство, например, с последующей визуализацией в приложении, связанном с виртуальной реальностью либо с каким-либо устройством, примеры которых описаны в рамках настоящего изобретения, в виде ладони, держащей округлый продолговатый предмет (например, рукоять оружия, спортивный снаряд, джойстик, штурвал самолета и т.д.).
[077] Стоит отметить, что длины составляющих элементов подсистемы 110 (в частности, плеча 235 подсистемы 110, предплечья 245 подсистемы 110, кисти 255 подсистемы 110) могут быть динамически изменяемыми, в частности, пользователем либо посредством использования различных устройств и/или механизмов, например, телескопических механизмов, контролируемых и/или управляемых описанным ниже блоком управления и/или вычислительным устройством, либо посредством использования пластичных материалов, либо посредством использования любых других систем и/или материалов, которые способны обеспечить регулировку, по крайней мере, длины как минимум одного элемента подсистемы 110, например, согласно характеристикам конечностей и других частей тела пользователя или согласно предпочтениям пользователя, либо особенностей систем, устройств, программного обеспечения (включая приложения для виртуальной реальности), в которых используется система, описываемая в рамках настоящего изобретения.
[078] Описываемая в настоящем изобретении система может включать, по крайней мере, одно устройство ввода 260. Устройства ввода (в том числе упомянутые выше) представляют собой периферийное оборудование, предназначенное для ввода данных и/или сигналов в электронное устройство, вычислительное устройство, например, компьютер, причем устройства ввода могут являться устройствами ввода графической, звуковой, видеоинформации, механическими устройствами ввода, непрерывными устройствами ввода, устройствами ввода для пространственного использования (мышь, трехмерный навигатор, джойстики, различные манипуляторы) и т.д.
[079] Устройство ввода 260 может быть представлено, например, ручкой-манипулятором (ФИГ. 9) для правой и левой рук пользователя. На каждом устройстве ввода может быть размещено, по крайней мере, по одной кнопке (910, ФИГ. 9) и/или, по крайней мере, по одному «курку», реализованном, например, кнопкой (920, ФИГ. 9), которые могут быть использованы пользователем для взаимодействия с программным обеспечением, связанным с описываемой системой, и/или с описываемой системой и ее элементами. Так, например, посредством устройства ввода 260 пользователь может выбирать пункты меню программного обеспечения, переключаться между камерами в виртуальном компьютерном мире, изменять режимы управляемых пользователем механизмов, изменять режимы игры и/или компьютерных объектов. Также, пользователь может изменять настройки, режимы, функционал описываемой системы, так, например, пользователь может регулировать силу воздействия сервомоторов системы обратной связи, описываемой в рамках настоящего изобретения, а также изменять положение описываемой системы (например, перемещение, по крайней мере, одной описываемой подсистемы влево, вправо, вверх, вниз, отклонение от вертикальной оси и т.д.), угол поворота данной системы, изменять чувствительность устройств ввода и/или датчиков (в частности, описанных ниже энкодеров и/или любых других датчиков угла поворота подсистемы 130) описываемой системы и/или ее частей и т.д., причем изменение положения, по крайней мере, одной подсистемы может осуществляться мотором (в частности, электромотором), управляемым пользователем и/или блоком управления, и/или вычислительным устройством, в частности программным обеспечением, установленном на вычислительном устройстве и/или в блоке управления.
[080] Стоит отметить, что устройство ввода 260 может являться частью подсистемы 110, например, может крепиться к подсистеме 110, в частности, к кисти 255 подсистемы 110.
[081] Стоит также отметить, что в качестве устройств ввода 260 могут быть использованы известные стандартные устройства ввода, например, компьютерные мыши, джойстики, тачпады, джойпады, стилусы («перья») и т.д., либо могут реализовывать в себе их функционал или его часть.
[082] Подсистема 110, например, посредством расположенных на элементах подсистемы 110 и/или элементах системы, описываемой в рамках настоящего изобретения, способна отслеживать (регистрировать углы) поворот кисти пользователя, в частности при помощи датчиков угла поворота, которые могут быть реализованы в виде энкодеров:
[083] в плоскости y-z (ФИГ. 3) в пределах, по крайней мере, от +90 градусов до -90 градусов относительно вертикальной оси;
[084] в плоскости x-z (ФИГ. 3) в пределах, по крайней мере, от +30 градусов до -30 градусов относительно горизонтальной оси;
[085] в плоскости x-y (ФИГ. 3) в пределах, по крайней мере, от +90 градусов до -90 градусов относительно вертикальной оси.
[086] Вычисленная экспериментальным способом максимальная скорость движения предплечья (движение в плечевом суставе) равна, по крайней мере, 0.01648 рад/мсек, что эквивалентно 0,94 град/мсек (или с учетом округления 1 град/мсек).
[087] Вычисленная экспериментальным способом максимальная скорость движения в лучезапястном суставе равна, по крайней мере 1 град/мсек.
[088] В частном случае, когда локтевой сустав представлен цилиндрическим шарниром, обеспечивающим сгибание-разгибание руки пользователя в плоскости движения предплечья в пределах, по крайней мере, 165 градусов, датчик измерения положения локтевого сустава может иметь, по крайней мере. 330 регистрируемых положений со скоростью регистрации как минимум 1 положение за 0,5 миллисекунды (мсек), что эквивалентно частоте в 2кГц.
[089] Для плечевого сустава датчик измерения положения может иметь:
[090] по крайней мере, 720 регистрируемых положений в плоскости x-z (ФИГ. 3);
[091] по крайней мере, 488 регистрируемых положений в плоскости y-z (ФИГ. 3);
[092] по крайней мере, 440 регистрируемых положений в плоскости x-y (ФИГ. 3)
[093] со скоростью регистрации, по крайней мере, 1 положение в 0.5 мсек или 2 кГц.
[094] Для лучезапястного сустава датчик измерения положения может иметь:
[095] по крайней мере, 360 регистрируемых положений в плоскости y-z (ФИГ. 3);
[096] по крайней мере, 120 регистрируемых положений в плоскости x-z (ФИГ. 3);
[097] по крайней мере, 360 регистрируемых положений в плоскости x-y (ФИГ. 3)
[098] со скоростью регистрации не менее 1 положение в 0,5 мсек или 2 кГц.
[099] Как было сказано выше, датчики измерения положения элементов подсистемы 110, в частности плеча 235 подсистемы 110, предплечья 245 подсистемы 110, кисти 255 подсистемы 110, а также подсистемы 130, описанной ниже, могут быть реализованы в виде датчиков углов поворота (ДУП), энкодеров, т.е. преобразователей угловых перемещений, способных преобразовывать угол поворота вращающегося объекта в электрические сигналы. В частности, за счет описываемых конструктивных и функциональных особенностей описываемой системы, подсистем и/или составных частей подсистем, а также, в частном случае, за счет точности и скорости регистрации движения и/или положения пользователя и/или подсистем и составных частей подсистем, описанных в рамках настоящего изобретения, описываемая система способна повысить эффективность и точности управления объектами реального и/или виртуального мира.
[0100] В одной реализации изобретения датчик угла поворота может быть реализован в виде системы светодиода и системы линз, фокусирующих свет светодиода, а также поверхности, на которую направлен свет светодиода. При помощи светодиода и системы линз подсвечивается участок поверхности. Отраженный от такой поверхности свет собирается второй линзой и попадает на приемный сенсор микросхемы (оптический сенсор) - процессор обработки изображений. Эта микросхема, в свою очередь, делает снимки поверхности, на которую попадает свет от светодиода, с высокой частотой (кГц). Причем микросхема (оптический сенсор) не только делает снимки, но сама же их и обрабатывает, так как содержит: систему получения изображения (Image Acquisition System, сокр. - IAS) и интегрированный DSP-процессор/процессор обработки сигналов/снимков (Digital signal processing, сокр DSP). На основании анализа серии последовательных снимков (представляющих собой квадратную матрицу из пикселей разной яркости), интегрированный DSP-процессор высчитывает результирующие показатели, свидетельствующие о направлении перемещения оптического сенсора (или светодиода) вдоль осей x и y (плоскость, на которую попадает свет от светодиода лежит в плоскости ху), и передает результаты своей работы на устройство, способное принимать и обрабатывать сигналы от DSP-процессора, например, по последовательному порту, например, производить чтение и обработку данных с датчиков/сенсоров по SPI-интерфейсу (от англ. Serial Peripheral Interface последовательный периферийный интерфейс, сокр. SPI; SPI bus - шина SPI).
[0101] В целом описанная система измерения углов, помимо микросхемы-сенсора, может включать еще несколько элементов, например держатель, в который устанавливаются светодиод и, непосредственно, сама микросхема сенсора. Такая система элементов может быть закреплена на печатной плате, между которой и нижней поверхностью энкодера закрепляется пластиковый элемент, содержащий две линзы (о назначении которых было написано выше).
[0102] Сущность датчика измерения угла поворота состоит в том, что оптический сенсор регистрирует изменения положения поверхности регистрируемого элемента относительно неподвижной опоры. Зная радиус регистрируемого элемента R и величину смещения ΔХ, вычислительное устройство способно определить угол поворота Δϕ. Регистрируемый элемент может иметь форму диска или сферы и соединяться коаксиально с деталью механизма, угол отклонения которой необходимо измерить.
[0103] Поскольку интегрированный в сенсор DSP-процессор способен обрабатывать данные снимков и вычислять относительные значения смещения сенсора вдоль осей X и Y, то регистрируемый элемент может иметь форму сферы. В данном случае должны быть вычислены углы поворота Δϕx и Δϕy на плоскости xy. Одними из основных технических характеристик упомянутых оптических сенсоров, влияющими на функциональные характеристики датчика измерения угла поворота, являются:
[0104] - разрешение, отражающее точность изображения, захваченного «камерой» оптического сенсора, выраженное обычно в количестве считываний на дюйм (англ. counts per inch, сокр. cpi) или в количестве точек на дюйм (англ. Dots per inch, сокр. dpi), или в тмм - количестве точек на миллиметр;
[0105] - частота кадров, включающая количество изображений, снятых «камерой» каждую секунду. Значение данного параметра выражается в количестве кадров в секунду (англ. frame per second, сокр. fps);
[0106] - максимальная скорость, являющая скоростью перемещения оптического сенсора, при которой процессор и вся система измерения угла поворота способна обрабатывать такие перемещения. Измеряется обычно в дюймах в секунду (англ. inches per second, сокр. ips);
[0107] - частота последовательного интерфейса, определяющая скорость обмена информацией с процессором.
[0108] В качестве оптических сенсоров могут быть использованы различные сенсоры, в частности, оптические сенсоры, производимые компанией Avago Technologies, например, ADNS-2620, ADNS-3530, ADNS-3G60, ADNS-3080, ADNS-6010, ADNS-9500.
[0109] Оптический сенсор, использующийся в описываемом примерном варианте энкодера, может обладать следующими характеристиками:
[0110] - максимальная скорость изменения угла, по крайней мере, 1000 град/сек (17 рад/с);
[0111] - скорость измерения, по крайней мере, 2000 раз в секунду.
[0112] Также стоит отметить, что регистрируемый элемент может иметь различный радиус, в частности 1-2,5 сантиметров.
[0113] Стоит отметить, что датчики углов поворота/энкодеры могут быть реализованы оптическими, резистивными, магнитными, механическими, электромеханическими и любыми другими типами и видами датчиков.
[0114] Стоит также, отметить, что, по крайней мере, один датчик углов поворота (в частности, датчик, регистрирующий поворот подсистемы 130 вокруг своей оси) может располагаться на оси вращения подсистемы 130, как например, показано на ФИГ. 12.
[0115] Стоит отметить, что указанные значения для параметров описываемой в рамках настоящего изобретения системы (количество регистрируемых положений датчиком, скорость регистрации датчиком, скорости в суставах, включая максимальные скорости, вес, рост, длины конечностей пользователя и т.д.) являются примерными и могут изменяться, как в меньшую, так и в большую стороны, соответственно расчетные значения и значения определенные экспериментально могут отличаться от представленных в рамках описания настоящего изобретения.
[0116] Стоит отметить, что упомянутые выше подсистемы воздействия на пользователя могут включать датчики приложенной силы и электромоторы, устанавливаемые на подсистему 110 и/или на подсистему 120, и/или подсистему 130, и/или другие подсистемы системы, описываемой в рамках настоящего изобретения, и/или на другие подсистемы, подключаемые к описываемой системе и управляемые, например, посредством блока управления системы, описываемой в рамках настоящего изобретения, либо программным обеспечением, установленном на цифровом устройстве, к которому подключена описываемая в настоящем изобретении система, либо посредством любого другого устройства и/или установленном на нем программном обеспечением, к которым могут относиться модули устройств, систем, механизмов (в частности, управляемых пользователем) и/или установленное на них программное обеспечение.
[0117] Датчики, в частности датчики приложенной силы и электромоторы, способны регистрировать и создавать усилия, например, пропорциональные модели действующих сил в виртуальной реальности на различные объекты, в частности, на персонажа или на объекты реального/физического мира, включая, но не ограничиваясь, устройства, механизмы и/или их элементы, которыми управляет пользователь посредством описываемой в рамках настоящего изобретения системы, что позволяет создать дополнительные ощущения у пользователя при взаимодействии с виртуальной реальностью (в частности, за счет этого повышается точность управления персонажем и усиливается эффект погружения в виртуальную реальность) и/или управляемыми системами, устройствами и механизмами, что позволяет увеличить точность позиционирования таких систем, устройств, механизмов и/или частей систем, устройств, механизмов.
[0118] Датчики приложенной силы могут быть реализованы тактильными датчиками силы (датчики касания, датчики усилия, датчики проскальзывания). Также, датчики приложенной силы могут быть реализованы пьезорезонансными, пьезоэлектрическими, резистивными, магнитными, емкостными и другими типами датчиков.
[0119] Как было сказано выше, описываемая в рамках настоящего изобретения подсистема 110 может крепиться к подсистеме 130 или крепиться на теле пользователя, например, посредством различного рода креплений и систем фиксации, расположенных на подсистеме 110, например, при помощи, по крайней мере, одного фиксирующего ремня либо других фиксирующих механизмов, элементов или приспособлений.
[0120] Стоит отметить, что подсистема 110 может быть использована для отслеживания положения и движения нижних конечностей пользователя с доработками или без оных, т.е. представлять собой универсальную подсистему для регистрации и воздействия на ноги пользователя. В таком случае описываемая в настоящем изобретении система может включать две подсистемы 110 (для рук и для ног пользователя, соответственно), в частном случае, объединенных между собой. Стоит отметить, что в частном варианте изобретения подсистема для захвата положения и движения ног пользователя, реализованная в виде подсистемы 110, может крепиться к подсистеме 130 или использоваться без подсистемы 130 и/или подсистемы 120.
[0121] На ФИГ. 3 изображена кинематическая модель верхней конечности человека и соответствующие ей схематично изображенные части подсистемы 110.
[0122] На ФИГ. 4 изображен объем движений в плечевом суставе 330 (ФИГ. 3), реализованном шарниром 230 подсистемы 110 системы, описываемой в рамках настоящего изобретения, на примере руки человека.
[0123] На ФИГ. 5 изображен объем движений в локтевом суставе 340 (ФИГ. 3), реализованном шарниром 240 подсистемы 110 системы, описываемой в рамках настоящего изобретения, на примере руки человека.
[0124] На ФИГ. 6 изображен объем движений в лучезапястном суставе 350 (ФИГ. 3), реализованном шарниром 250 подсистемы 110 системы, описываемой в рамках настоящего изобретения, на примере руки человека.
[0125] На ФИГ. 7 изображен примерный вариант подсистемы для захвата положения и движения ног пользователя 120 в виде педалей-браслетов. Подсистема 120 используется для отслеживания положения и перемещения ног пользователя, которая, в частном случае, способна распознавать положение и перемещение бедра, колена, стопы и/или пальцев ног пользователя, например, с использованием, по крайней мере, одного из известных или изобретенных в будущем устройств, механизмов, систем, позволяющих отслеживать/регистрировать движения и положения тела и/или частей тела и конечностей пользователя. Подсистема 120 может фиксироваться/крепиться на левой и правой ногах (или обуви) пользователя любыми известными видами фиксаторов (710), например, ремнями, «липучками» либо другими способами крепления объектов друг к другу и может использоваться, например, для управления перемещением персонажа в виртуальной реальности, компьютерной игре, механизированного устройства, например, человекоподобного робота и т.д. Подсистема 120 может быть выполнена в любом форм-факторе, например, в виде полусфер, различного вида/типа обуви (тапочек, сапог, ботинок и т.д.), включая спортивную обувь и т.д. Также, подсистема может быть выполнена в виде педалей (подножек или рычагов, нажимаемых, например, ногой у транспортных средств, механизмов, машин, музыкальных инструментов и т.д.). Стоит также отметить, что, как описано ниже, по крайней мере, одна описываемая в настоящем изобретении подсистема, в частности, подсистема 120, может быть подключена к вычислительному устройству (1120, ФИГ. 11) напрямую или через блок управления 155. Стоит также отметить, что подсистема 120 может быть реализована любым известным устройством для взаимодействия пользователя с вычислительным устройством, например, педалями для игрового руля, штурвала и т.д.
[0126] Подсистема 120 может иметь, по крайней мере, одну точку нажатия (720). Точки нажатия представляют собой поверхности или элементы поверхности, которые способны регистрировать оказываемое на них воздействие со стороны пользователя (частей тела пользователя, включая пальцы ног пользователя) и/или поверхности, с которыми соприкасается подсистема 120. В частном варианте, подсистема 120 может иметь пять точек нажатия, определяющих пять направлений нажатия, в частности, веред, назад, влево, вправо, вниз по вертикальной оси, в различных вариантах/сочетаниях, например, вперед-вправо-вниз, вперед-влево-вниз, назад-вправо-вниз, назад-влево-вниз, вперед-вправо, вперед-влево, назад-вправо, назад-влево, вправо-вниз, влево-вниз, назад-вниз, вперед-вниз и т.д.
[0127] Точки нажатия на педалях могут быть реализованы различными видами датчиков/регистраторов, способными отслеживать факт нажатия на точки нажатия ногами или частями ног пользователя. Такие регистраторы («клавиши» педалей-браслетов 720, включая центральную «клавишу» педали, в частном случае, обеспечивающую регистрацию вертикальное направление нажатия) могут быть реализованы, например, различными видами и типами кнопок.
[0128] В частном варианте реализации изобретения «клавиши» нажимаются поверхностью, на которой располагается педаль, в зависимости от наклона подсистемы 120 ногой пользователя.
[0129] Педали-браслеты, являющиеся частным случаем подсистемы 120, или по крайней мере одна составная часть подсистемы 120, могут быть выполнены из материала, обеспечивающего надежное сцепление подсистемы 120, в частности педалей-браслетов с большинством напольных покрытий (ламината, линолеума, ковролина, плитки и т.д.), например, из резины, прорезиненных материалов и т.д. Педали-браслеты могут быть реализованы в пыле- и влагозащитном исполнении (например, во влагостойком и/или пылестойком/пылеустойчивом корпусе), например с классом защиты не ниже IP41.
[0130] Стоит также отметить, что подсистема 120 может быть реализована в виде системы датчиков, крепящихся на ногах пользователя, на подсистеме 130, а также располагаться вокруг ног пользователя и/или подсистемы 130. Стоит также отметить, что подсистема 120 может быть установлена на поверхности, например, на которой располагается подсистема 130, например, на полу помещения, в котором находится пользователь.
[0131] Подсистема 120 также может отслеживать положение нижних конечностей (ног) пользователя и их отдельных частей (бедра, стопы, пальцев ног и т.д.), например, при помощи использования инерциальной/инерционной системы отслеживания положения и перемещения ног пользователя. Такая система отслеживания положения и перемещения ног пользователя может быть реализована посредством использования, по крайней мере, одного (для правой ноги и для левой ноги) МЭМС-датчиков (микроэлектромеханических систем, сокр. МЭМС), таких как акселерометр, гироскоп, магнетометр и т.д. Использование инерциальных систем и датчиков способны обеспечить управление пользователем, например, движениями виртуального персонажа, камерой сцены в компьютерной игре или механическим устройством, не только посредством нажатия на имеющиеся точки контактов на подсистеме 120, но и посредством движения и положения ног пользователя в пространстве. Таким образом, подсистема 120 способна расширить функциональные возможности управления нижними конечностями виртуального персонажа либо манипуляторами устройств/систем, управляемых пользователем, и, в частности, позволяет совершить такие движения как махи, удары, приставные шаги и другие типы манипуляций.
[0132] Стоит отметить, что точки нажатия могут быть реализованы кнопками различными видами датчиков, например, сенсорными датчиками, механическими, электромеханическими датчиками, в частности кнопками, например, как у компьютерной мыши.
[0133] Также стоит отметить, что в зависимости от типа датчиков, установленных на подсистеме 120, подсистема способна регистрировать силу воздействия, оказываемую пользователем на поверхности, с которыми взаимодействует пользователь, причем сила воздействия/нажатия может обрабатываться блоком управления 155, например, с целью передачи силы воздействия на подсистему 120 и ее элементы (в частности, точки воздействия) управляемым пользователем объектам и их элементам, например, объектам виртуального мира или объектам реального мира (например, педали автомобиля, велосипеда).
[0134] Стоит также отметить, что подсистема 120 и/или подсистема 130 может быть оснащена, по крайней мере, одним датчиком веса (например, тензометрическим датчиком веса), связанным с блоком управления 155, показания которого могут использоваться для регистрации веса пользователя, что может быть учтено при взаимодействии пользователя с описываемой системой, например, в зависимости от веса тела пользователя компьютерный персонаж пользователя может глубже проваливаться в песок виртуального мира, либо для проверки максимально допустимого веса пользователя для использования механизмов, управляемых пользователем посредством описываемой в настоящем изобретении системы, и т.д. Такие датчики веса могут быть установлены, например, внутри или на поверхности подсистемы 120 (например, внутри или на поверхности педалей-браслетов) и/или сиденье кресла, в том случае, если подсистема 130 реализована в виде кресла.
[0135] На ФИГ. 8 изображен примерный вариант подсистемы для захвата положения и движения тела пользователя 130, реализованный в виде кресла. Подсистема 130 предназначена для регистрации (захвата) положения тела и отдельных частей пользователя в пространстве (реальном мире) и может состоять из нескольких частей. Так, например, подсистема 130 может быть реализована в виде кресла (стула, офисного кресла, компьютерного кресла и т.д.). Стоит отметить, что в частном случае подсистема 130 может быть реализована в виде любого устройства или конструкции или нескольких устройств или конструкций, в зависимости от назначения, использования и сферы применения описываемой в рамках настоящего изобретения системы. Так, например, подсистема 130 может быть реализована в виде велосипеда/велотренажера, устройства, имитирующего греблю на байдарке, кресла и/или элементов кабины транспортного средства, например, автомобиля, поезда, самолета (в частном случае, пилота самолета), корабля, космического корабля, рабочего места оператора, например, оператора механических устройств, в частности, робота, подъемного крана и т.д. Стоит отметить, что управляемые пользователем устройства, механизмы, а также исполняемые пользователем действия могут располагаться, как в реальном мире (на стройке, в космосе и т.д.), так и в виртуальном мире, например, в компьютерной игре, мире виртуальной реальности и т.д.
[0136] В частном варианте изобретения, подсистема 130 может быть реализована в виде беговой дорожки.
[0137] В случае, когда подсистема 130 реализована креслом, в частности, компьютерным или офисным креслом, то реализация описываемой в рамках настоящего изобретения системы может включать стандартные кресла, используемые пользователем дома, на работе, в игровом клубе и т.д., продающихся в магазинах или изготовленные на заказ под определенного пользователя.
[0138] Подсистема 130 может состоять из нескольких частей в зависимости от реализации и/или функционала системы, описываемой в рамках настоящего изобретения.
[0139] Так, например, в частном случае, когда подсистема 130 системы, описываемой в рамках настоящего изобретения, реализована в виде кресла, то такая подсистема 130 может состоять, например, из сиденья, и/или спинки, и/или опоры сиденья/«крестовины» с роликами/колесами (либо с использованием других устройств и/или способов и систем перемещения описываемой системы в пространстве, например, посредством использования накладок на опору кресла из материала с низким коэффициентом трения, изготовление опоры или элементов опоры из такого же материала) или без них, и/или ножки/стойки кресла, и/или подлокотников кресла.
[0140] Стоит отметить, что опора сиденья кресла и/или спинка кресла может включать устройства, механизмы и/или системы для регулировки/регулирования/изменения высоты и/или угла поворота, и/или угла наклона сиденья кресла (например, вперед-назад-влево-вправо), и/или угла поворота, и/или угла наклона спинки кресла. Такие упомянутые устройства, механизмы и/или системы могут быть реализованы в виде, например, газлифта и/или, либо другого механизма, позволяющего регулировать высоту положения тела пользователя пользователем средствами (например, подсистемами и их составными частями, описываемыми в рамках настоящего изобретения) описываемой системы и/или средствами, связанными с описываемой в рамках настоящего изобретения системы, например, посредством вычислительного, электронного, цифрового устройства (в частности, компьютера), причем способы изменения высоты и/или поворота составных частей подсистемы 130 могут включать механические способы, и/или электрические способы, и/или электромеханические способы, и/или другие способы изменения положения составных частей/элементов подсистемы 130.
[0141] Как было сказано выше на подсистему 130 может крепиться/монтироваться подсистема 110, блок управления 155 системы, описываемой в рамках настоящего изобретения, описанный ниже, и другие устройства и подсистемы, в частности, блок управления, блок питания электромоторами/вибромоторами, плата управления электромоторами/вибромоторами, подсистемы системы, описываемой в рамках настоящего изобретения. Стоит также отметить, что к подсистеме может крепиться блок питания управляющего устройства вертикальным и/или горизонтальным положением, и/или вращением подсистемы 130.
[0142] Подсистема 130 может обеспечивать поворот/разворот пользователя на 360 градусов, регулировку высоты пользователя, наклон тела пользователя вперед и назад, в частности, наклон верхней части туловища пользователя, по крайней мере, на 30 градусов от вертикальной оси, максимальную грузоподъемность не менее 120 килограмм.
[0143] Подсистема 130 может быть оборудована системой отслеживания угла поворота подсистемы 130 и отдельных ее элементов относительно собственной оси и угла наклона подсистемы 130 от вертикальной оси.
[0144] Стоит отметить, что, по крайней мере, один датчик отслеживания угла наклона или поворота системы, описываемой в настоящем изобретении системы, в частности, упомянутых в настоящем изобретении подсистем, например, подсистемы 130 и/или подсистемы 110 или частей упомянутых подсистем, может быть реализован датчиком, например, представляющим собой инклинометр, в частности, использующий акселерометр.
[0145] Так, например, по крайней мере, один инклинометр может располагаться на, по крайней мере, одной части подсистемы 110 и/или подсистемы 130.
[0146] Описываемые в рамках настоящего изобретения подсистемы (в частности, подсистема 110, 120, 130 и другие подсистемы, связанные с подсистемой, описываемой в рамках настоящего изобретения, или являющиеся частью описываемой подсистемы, в частности, подсистема регулировки высоты и/или угла поворота, и/или угла наклона подсистемы 130 и/или ее отдельных частей) и/или датчики, регистраторы и другие устройства и системы, связанные с описываемой в рамках настоящего изобретения системой, могут контролироваться, управляться блоком управления. Как было сказано выше, блок управления системы 155 может быть использован для регистрации и обработки параметров (данных) подсистем, передаваемых в блок управления системы 155 с целью, например, преобразования таких данных в команды, воспринимаемые («понимаемые») электронным (цифровым) устройством, например, компьютером или компьютерной платой, данные из которых, в свою очередь, могут быть преобразованы в программный код и/или команды, воспринимаемые программным обеспечением, например, реализующим (воспроизводящим) поведение пользователя в реальном мире в мире виртуальной реальности либо способным передавать команды на управление механическим устройствам, роботизированным устройствам и другим видам устройствам, которые могут управляться пользователем.
[0147] Стоит отметить, что, как было сказано выше, высота и/или угол поворота, и/или угол наклона подсистемы 130 и/или отдельных частей подсистемы 130 могут регулироваться пользователем (как в реальном мире, например, посредством устройств ввода или элементов управления, в частности, кнопками, рычагами и т.д., так и в виртуальном мире, например, посредством игрового меню) и/или приложением/командами устройства, с которым связана описываемая в рамках настоящего изобретения система (например, компьютерным программным обеспечением либо программным обеспечением и/или инструкциями устройств, управляемых пользователем в реальном мире или виртуальном мире), а также могут регулироваться блоком управления системы, описанным в рамках настоящего изобретения.
[0148] Так, описываемая подсистема регулировки положения, поворота и позиции пользователя способна создавать дополнительные ощущения взаимодействия/управления пользователя с виртуальным пространством и объектов виртуального пространства, а также с объектами и механизмами реального мира.
[0149] Стоит отметить, что регистрация и контроль углов поворота, наклона, а также высоты подсистемы 130 и/или ее элементов (спинки, сиденья, ножки и т.д.) может быть оборудовано системой отслеживания положения/поворота, например, с использованием описываемых в данном изобретении систем регистрации, в частности, энкодерами.
[0150] Также стоит отметить, что вместо энкодеров, датчиков углов вращения могут использоваться различные датчики, устройства и/или системы для регистрации положений элементов системы, описываемой в рамках настоящего изобретения, в частности, элементов подсистемы 110, и/или подсистемы 130, и/или подсистемы 120. Так, например, могут использоваться инерциальные датчики (например, акселерометр, гироскоп) и/или другие типы и виды датчиков, способных отслеживать положение элементов описываемой системы и ее составных элементов и/или подсистем, связанных с описываемой системой. Такие датчики могут устанавливаться, например, на элементах подсистемы 110, в частности, на плече подсистемы 110, предплечье подсистемы 110, кисти подсистемы 110, например, в центральных частях упомянутых элементов подсистемы.
[0151] Стоит также отметить, что подсистема 130 может быть оборудована средствами регулировки высоты и/или наклона, и/или поворота подсистемы 130 и/или ее элементов, например, от описываемого в рамках настоящего изобретения блока управления. Описываемая подсистема управления положением подсистемы 130 может состоять, по крайней мере, из одного электропривода, из одного блока питания и, по крайней мере, из одного блока управления электроприводом.
[0152] Подсистема 130 может быть оснащена датчиком (сенсорный датчик, механическая, электрическая, электромеханическая кнопка или любой другой тип датчика) определения наличия/нахождения пользователя в кресле. Такой датчик может быть связан с блоком управления, так что блок управления системой 155 на основе полученных от датчика данных может подавать или отключать подвод электроэнергии, передающейся на электрические элементы описываемой системы, либо запускать/включать вычислительное, электронное, цифровое устройства (например, персональный компьютер, к которому подключена описываемая в рамках настоящего изобретения система) или механизм, управляемый пользователем, либо запускать программное обеспечение (или закрывать/осуществлять выход из программного обеспечения), связанное с такими устройствами, механизмами или описываемой системой. Стоит также отметить, что изменение положения подсистемы 130 и/или ее частей может осуществляться пользователем либо автоматически в соответствии с командами/инструкциями (описываемого блока управления, программного обеспечения, связанного с описываемой системой) или заранее определенным набором движений пользователя в зависимости от устройства, системы, механизма, управляемых пользователем, либо определенным программным обеспечением (компьютерной игрой или программным обеспечением удаленного управления механизмами/системами). Так, например, в игре подсистема 130 может опускаться при сильном наклоне пользователя вперед и подниматься, когда пользователь привстанет или сделает взмах руками вверх.
[0153] Как было сказано выше, пользователь сам может регулировать положение подсистемы 130 в пространстве. Так, например, пользователь может отталкиваться ногами (в частности, по крайней мере, одной прикрепленной к ноге пользователя подсистемой 120) от поверхности, на которой расположена подсистема 130 (либо от других поверхностей и объектов окружающих систему, описываемую в рамках настоящего изобретения) с целью перемещения тела пользователя и описываемой системы в пространстве, например, с целью перемещения пользователя влево, вправо, вверх, например, вместе с, по крайней мере, одной подсистемой описываемой в рамках настоящего изобретения или со всей описываемой системой в целом. Стоит отметить, что пользователь может отталкиваться ногами (в частности, как было описано выше) от упомянутых поверхностей и объектов с целью изменения угла наклона (вперед, назад, влево, вправо) тела или/или частей тела (например, верхней части туловища) пользователя, а также с целью вращения пользователя (например, с по крайней мере, одной частью описываемой в рамках настоящего изобретения системы или со связанными описываемыми подсистемами), причем регистрация вращения может осуществляться различными типами датчиков, например, описываемых в рамках настоящего изобретения.
[0154] Стоит отметить, что различные варианты описываемой в рамках настоящего изобретения системы могут реализовывать описываемую систему без некоторых упомянутых элементов системы и/или подсистем описываемой системы. Так, например, в одной реализации изобретения подсистема 110 может крепиться непосредственно к телу пользователя фиксирующими элементами или системами, которые могут включать лямки, позволяющие удерживать подсистему 110 на плечах пользователя, и/или систему фиксирующих ремней, позволяющую закрепить подсистему 110 на теле пользователя, и/или каркас (включая жесткий каркас) с удерживающими элементами, позволяющими зафиксировать подсистему 110 на теле пользователя, и другие устройства, элементы, механизмы, позволяющие закрепить подсистему 110 на теле пользователя и/или, по крайней мере, на одной части тела пользователя, например на руках, плечах, спине, поясе пользователя и т.д.
[0155] Стоит также отметить, что описываемая в рамках настоящего изобретения система может использоваться без подсистемы 130 или без, по крайней мере, одного элемента подсистемы 130. Так, например, подсистема 130 может быть представлена без спинки кресла (например, в случае, когда подсистема 130 представлена креслом), без подлокотников, без крестовины кресла и т.д.
[0156] Упомянутый ранее блок управления 155 (блок управления системой, блок управления системы, описываемой в рамках настоящего изобретения) может быть выполнен в виде, по крайней мере, одной электронной платы (печатной платы со смонтированными необходимыми элементами: микросхемами, конденсаторами, резисторами, разъемами и т.д.), обеспечивающей полный функционал устройства. Разъемы блока управления могут использоваться для подключения различных описываемых подсистем к блоку управления.
[0157] Блок управления системой 155 может обеспечивать следующие функциональные возможности системы, описываемой в рамках настоящего изобретения:
[0158] - опрос датчиков измерения углов отклонения (энкодеров), по крайней мере, элементов подсистемы 110;
[0159] - опрос датчиков измерения угла поворота подсистемы 130, и/или угла наклона подсистемы 130, и/или ее составных частей;
[0160] - опрос положения и нажатия кнопок устройств ввода 260;
[0161] - предварительную обработку поступающих сигналов от датчиков, сенсоров и т.д. описываемой системы и передача на вычислительное, электронное (цифровое) устройство, например, персональный компьютер, данных, в частности, посредством USB-интерфейса;
[0162] - управление положением подсистемы 130 и/или связанных с ней подсистем, например, подсистемы 110, по крайней мере, по вертикальной оси (поднятие, опускание подсистемы 130 и/или ее составных элементов);
[0163] - обеспечение тактильного отклика системы, описываемой в рамках настоящего изобретения, посредством передачи сигналов управления на подсистемы воздействия, описываемые в рамках настоящего изобретения, в частности, на вибромоторы, которые могут быть связаны и/или установлены на подсистеме 110, подсистеме 120, подсистеме 130 или являться их частью.
[0164] Стоит отметить, что предварительная обработка поступающих сигналов от датчиков, сенсоров и т.д. описываемой системы в блок управления может включать формирование пакета данных на отправку на вычислительное устройство.
[0165] Стоит отметить, что предварительная обработка также может включать фильтрацию данных о координатах текущего смещения элементов описываемой системы и/или элементов описываемых подсистем (например, представленный усредняющим фильтром или фильтром Калмана), а также может включать определение положения начала отсчета и корректировки координат для описываемой системы согласно программному обеспечению, связанному с описываемой системой.
[0166] Стоит также отметить, что, по крайней мере, одна из функциональных возможностей блока управления может быть реализована вычислительным устройством (1120, ФИГ. 11), например, посредством установленного на таком устройстве программного обеспечения, причем такое программное обеспечение может обслуживать описываемую систему либо может быть программным обеспечением, реализующим функционал описываемой системы, например компьютерной игрой, приложением управляемого пользователем устройства и т.д.
[0167] Блок управления системой 155 может быть подключен к вычислительному устройству, например персональному компьютеру пользователя, например по проводному интерфейсу, в частности интерфейсу USB, в частности USB 3.0, USB 2.0, и/или по беспроводному интерфейсу, например Wi-Fi, Bluetooth и т.д., и/или посредством любого другого интерфейса, способного обеспечивать передачу данных, в частности, на персональный компьютер с блока управления и/или передачу данных с персонального компьютера на блок управления системой, или подсистемами и элементами системы, описываемой в рамках настоящего изобретения.
[0168] Блок управления 155 используется, в частности, для сбора данных с, по крайней мере, одного из описываемых в рамках настоящего изобретения датчика (например, системы, элементов, системы, подсистем, элементов подсистем, подключаемых к описываемой системе устройств и т.д.), проводит предобработку собранных данных, отправляет команды, полученные от вычислительного устройства 1120 (в частности, от программного обеспечения, установленного на вычислительном устройстве) к контроллерам систем управления описываемой системой, в частности, описываемым подсистемам воздействия, например, вибромоторам.
[0169] Электропитание блока управления 155 и, по крайней мере, одного датчика описываемой в настоящем изобретении системы может осуществляться от вычислительного устройства, например, персонального компьютера, по интерфейсу подключения, в частности, по интерфейсу USB, либо посредством отдельного блока питания, либо посредством упомянутого выше блока питания управляющего устройства вертикальным и/или горизонтальным положением, и/или вращением подсистемы 130.
[0170] На ФИГ. 10 показан примерный вариант структурной схемы системы, описываемой в рамках настоящего изобретения. Описываемая в рамках настоящего изобретения система может включать подсистему 110; датчики (1030а, 1030б) устройства ввода 260; датчиков угла поворота/датчиков измерения угла поворота (энкодеры) 1020; по крайней мере, один датчик измерения угла наклона пользователя (датчик измерения угла наклона подсистемы 130 и/или элементов подсистемы 130) 10240; по крайней мере, один датчик измерения угла поворота 1050 подсистемы 130; подсистему воздействия (элемент подсистемы воздействия) 1060 подсистемы 120, реализованной, например, вибромоторами; подсистему воздействия (элемент подсистемы воздействия) 1070 устройств ввода, реализованной, например, вибромоторами; датчиками регистрации нажатия 1080 подсистемы 120; плату управления вибромоторами 1065 (реализованной, например, в виде, по крайней мере, одной печатной платы и установленной, в частном случае, на одной из элементов описываемой системе, например, на подсистеме 130 и/или подсистеме 110, и/или подсистеме 120); блок управления системой/блок управления системы 155; подсистему 130.
[0171] На ФИГ. 11 показан примерный вариант системы, реализующей настоящее изобретение.
[0172] Описываемая в рамках настоящего изобретения система может включать дополнительные подсистемы/элементы системы 1112, например, реализованные в виде отдельных устройств, или набора устройств, связанных с элементами описываемой системы), в частности, элемент системы/подсистему визуализации изображения 1140, в частности, дисплей/монитор/экран телевизора и т.д., контроллеры/системы управления 1145, камеры 1135, например, веб-камеры, причем камера может быть зафиксирована на подсистеме 130 (как показано на ФИГ. 13), на подсистеме 110, на голове пользователя, на объектах, расположенных вокруг системы, описываемой в рамках настоящего изобретения, а также может включать шлем виртуальной реальности, очки виртуальной реальности, очки или шлем дополненной реальности, Microsoft HoloLens (1130), различные манипуляторы 1142 включая различные роботизированные устройства, технику и т.д.
[0173] Также описываемая в рамках настоящего изобретения система может включать вычислительное устройство 1120, реализованное, например, компьютером (персональным компьютером, ноутбуком), мобильным устройством (смартфоном, телефоном) и другими типами вычислительных и/или электронных устройств, включая цифровые и аналоговые устройства.
[0174] Система также может включать описанные в рамках настоящего изобретения подсистемы воздействия 1150, например, предназначенные для осуществления и контроля воздействия на пользователя.
[0175] Система также включает различные описанные в рамках настоящего изобретения датчики 1114 и блок управления 155.
[0176] Также, описываемая в настоящем изобретении система включает различные комбинации подсистем, описываемых в настоящем изобретении, т.е. комбинации из: подсистемы 110 и/или подсистемы 120, и/или подсистемы 130.
[0177] Стоит отметить, что элементы описываемой системы, изображенные на ФИГ. 11 могут взаимодействовать между собой, и/или с блоком управления 155, и/или с вычислительным устройством 1120, и/или с системой 1110 описываемой в рамках настоящего изобретения и/или, по крайней мере, с одной из подсистем описываемой системы.
[0178] На ФИГ. 12 показаны примерные варианты размещения датчиков угла поворота, описываемых в рамках настоящего изобретения.
[0179] На ФИГ. 13 показан вариант крепления камеры к подсистеме для захвата положения и движения рук пользователя.
[0180] Стоит отметить, что на сегодняшний день большинство шлемов виртуальной и/или дополненной реальности поставляются с собственными контроллерами движений, которые способны отслеживать движения их джойстиков-манипуляторов (устройств ввода, например, описываемых в рамках настоящего изобретения) и положение головы пользователя в пространстве и, как было описано выше, могут подключаться и/или использоваться системой, описываемой в рамках настоящего изобретения.
[0181] Описываемая в рамках настоящего изобретения система способна отслеживать взаимосвязь положений и движений головы пользователя относительно тела и/или частей тела пользователя, например, соответствующую физиологическим возможностям пользователя. Отслеживание упомянутой взаимосвязи может быть реализовано описываемой системой, например, следующими способами:
[0182] - программным способом, когда драйвер и/или программное обеспечение описываемой в настоящем изобретении системы перехватывает из потока данных, передаваемых шлемом виртуальной и/или дополненной реальности на вычислительное устройство 1120, положение головы пользователя и корректирует полученные данные согласно с данными, полученными от подсистем описываемой системы, например, от датчиков подсистемы 130;
[0183] - пространственным способом, например, при помощи камеры, способной фиксировать положение и движения шлема и/или головы пользователя (либо любых других частей тела пользователя и тела пользователя в целом), которая может быть расположена относительно описываемой в рамках настоящего изобретения подсистемы, например, на кронштейне (как показано на ФИГ. 13), закрепленном на подсистеме 130 или подсистеме 110, либо закреплена или установлена на объектах реального мира, например, стенах, полу, потолке комнаты, в которой находится пользователь описываемой системы, и т.д.
[0184] Описанные выше примеры отслеживания положения головы пользователя и/или элементов описываемой системы способно позволить пользователю, например, вращать сцену в виртуальном пространстве в соответствии с данными датчика угла поворота подсистемы 130, а также дополнительно при повороте головы, руки, ноги, всего тела пользователя и т.д., причем руки пользователя при этом всегда возвращаются в «центр» сцены виртуального пространства.
[0185] На ФИГ. 14 показаны примерные варианты реализации локтевого сустава (в частности, локтевого сустава системы, описываемой в рамках настоящего изобретения) согласно настоящему изобретению. На ФИГ. 14(A) показан вариант реализации локтевого сустава описываемой системы одним цилиндрическим шарниром. На ФИГ. 14(Б) показан вариант реализации локтевого сустава описываемой системы двумя цилиндрическими шарнирами. Стоит отметить, что подобными вариантами реализации, в частности, 14(A), 14(Б), одного из суставов описываемой системы (в частном случае, одного из шарниров, описываемых в рамках настоящего изобретения) может быть реализован любой из описываемых в рамках настоящего изобретения сустав системы (в частном случае, шарнир), локтевой, плечевой, лучезапястный, коленный, тазобедренный, голеностопный и т.д.
[0186] На ФИГ. 15 показаны примерные варианты реализации плечевого сустава (в частности, плечевого сустава системы, описываемой в рамках настоящего изобретения) согласно настоящему изобретению. Элемент 1510 является примерным вариантом размещения одного из датчиков (в частности, оптического сенсора энкодера), описываемых в рамках настоящего изобретения. На ФИГ. 15(A) показан вариант реализации плечевого сустава описываемой системы двумя цилиндрическими шарнирами. На ФИГ. 15(Б) показан вариант реализации плечевого сустава описываемой системы тремя цилиндрическими шарнирами. Стоит отметить, что подобными вариантами реализации, в частности, 15(A), 15(Б), одного из суставов описываемой системы (в частном случае, одного из шарниров, описываемых в рамках настоящего изобретения) может быть реализован любой из описываемых в рамках настоящего изобретения сустав системы (в частном случае, шарнир), локтевой, плечевой, лучезапястный, коленный, тазобедренный, голеностопный и т.д.
[0187] На ФИГ. 16 показан примерный вариант реализации лучезапястного сустава согласно настоящему изобретению.
[0188] На ФИГ. 17 показан примерный вариант реализации подсистемы для захвата положения и движения верхних конечностей пользователя с использованием примерных вариантов, изображенных на ФИГ. 14-16, согласно настоящему изобретению.
[0189] На ФИГ. 18 показан пример компьютерной системы общего назначения, которая включает в себя многоцелевое вычислительное устройство в виде компьютера 20 или сервера, включающего в себя процессор 21, системную память 22 и системную шину 23, которая связывает различные системные компоненты, включая системную память с процессором 21.
[0190] Системная шина 23 может быть любого из различных типов структур шин, включающих шину памяти или контроллер памяти, периферийную шину и локальную шину, использующую любую из множества архитектур шин. Системная память включает постоянное запоминающее устройство (ПЗУ) 24 и оперативное запоминающее устройство (ОЗУ) 25. В ПЗУ 24 хранится базовая система ввода/вывода 26 (БИОС), состоящая из основных подпрограмм, которые помогают обмениваться информацией между элементами внутри компьютера 20, например в момент запуска.
[0191] Компьютер 20 также может включать в себя накопитель 27 на жестком диске для чтения с и записи на жесткий диск, не показан, накопитель 28 на магнитных дисках для чтения с или записи на съемный магнитный диск 29, и накопитель 30 на оптическом диске для чтения с или записи на съемный оптический диск 31 такой, как компакт-диск, цифровой видеодиск и другие оптические средства. Накопитель 27 на жестком диске, накопитель 28 на магнитных дисках и накопитель 30 на оптических дисках соединены с системной шиной 23 посредством, соответственно, интерфейса 32 накопителя на жестком диске, интерфейса 33 накопителя на магнитных дисках и интерфейса 34 оптического накопителя. Накопители и их соответствующие читаемые компьютером средства обеспечивают энергонезависимое хранение читаемых компьютером инструкций, структур данных, программных модулей и других данных для компьютера 20.
[0192] Хотя описанная здесь типичная конфигурация использует жесткий диск, съемный магнитный диск 29 и съемный оптический диск 31, специалист примет во внимание, что в типичной операционной среде могут также быть использованы другие типы читаемых компьютером средств, которые могут хранить данные, которые доступны с помощью компьютера, такие как магнитные кассеты, карты флеш-памяти, цифровые видеодиски, картриджи Бернулли, оперативные запоминающие устройства (ОЗУ), постоянные запоминающие устройства (ПЗУ) и т.п.
[0193] Различные программные модули, включая операционную систему 35, могут быть сохранены на жестком диске, магнитном диске 29, оптическом диске 31, ПЗУ 24 или ОЗУ 25. Компьютер 20 включает в себя файловую систему 36, связанную с операционной системой 35 или включенную в нее, одно или более программное приложение 37, другие программные модули 38 и программные данные 39. Пользователь может вводить команды и информацию в компьютер 20 при помощи устройств ввода, таких как клавиатура 40 и указательное устройство 42. Другие устройства ввода (не показаны) могут включать в себя микрофон, джойстик, геймпад, спутниковую антенну, сканер или любое другое.
[0194] Эти и другие устройства ввода соединены с процессором 21 часто посредством интерфейса 46 последовательного порта, который связан с системной шиной, но могут быть соединены посредством других интерфейсов, таких как параллельный порт, игровой порт или универсальная последовательная шина (УПШ). Монитор 47 или другой тип устройства визуального отображения также соединен с системной шиной 23 посредством интерфейса, например видеоадаптера 48. В дополнение к монитору 47, персональные компьютеры обычно включают в себя другие периферийные устройства вывода (не показано), такие как динамики и принтеры.
[0195] Компьютер 20 может работать в сетевом окружении посредством логических соединений к одному или нескольким удаленным компьютерам 49. Удаленный компьютер (или компьютеры) 49 может представлять собой другой компьютер, сервер, роутер, сетевой ПК, пиринговое устройство или другой узел единой сети, а также обычно включает в себя большинство или все элементы, описанные выше, в отношении компьютера 20, хотя показано только устройство хранения информации 50. Логические соединения включают в себя локальную сеть (ЛВС) 51 и глобальную компьютерную сеть (ГКС) 52. Такие сетевые окружения обычно распространены в учреждениях, корпоративных компьютерных сетях, Интранете и Интернете.
[0196] Компьютер 20, используемый в сетевом окружении ЛВС, соединяется с локальной сетью 51 посредством сетевого интерфейса или адаптера 53. Компьютер 20, используемый в сетевом окружении ГКС, обычно использует модем 54 или другие средства для установления связи с глобальной компьютерной сетью 52, такой как Интернет.
[0197] Модем 54, который может быть внутренним или внешним, соединен с системной шиной 23 посредством интерфейса 46 последовательного порта. В сетевом окружении программные модули или их части, описанные применительно к компьютеру 20, могут храниться на удаленном устройстве хранения информации. Надо принять во внимание, что показанные сетевые соединения являются типичными, и для установления коммуникационной связи между компьютерами могут быть использованы другие средства.
[0198] В заключение следует отметить, что приведенные в описании сведения являются примерами, которые не ограничивают объем настоящего изобретения, описанного формулой. Специалисту в данной области становится понятным, что могут существовать и другие варианты осуществления настоящего изобретения, согласующиеся с сущностью и объемом настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для определения потенциала развития высших психических функций и навыков человека посредством нейрометрии | 2017 |
|
RU2671869C1 |
| СПОСОБ И СИСТЕМА КОМПЛЕКСНОГО УПРАВЛЕНИЯ БОЛЬШИМИ ДАННЫМИ | 2018 |
|
RU2690777C1 |
| Способ и система для определения состояния пользователя | 2017 |
|
RU2693640C2 |
| Способ и система для управления устройствами и контроля устройств | 2017 |
|
RU2648564C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| Система и способ для безманжетного определения артериального давления | 2017 |
|
RU2759708C1 |
| СИМУЛЯЦИОННЫЙ КОМПЛЕКС ДЛЯ БЕЗПАСНОГО ОБУЧЕНИЯ МЕДИЦИНСКОГО ПЕРСОНАЛА В УСЛОВИЯХ ПАНДЕМИИ | 2020 |
|
RU2748960C1 |
| Способ противодействия вредоносному программному обеспечению (ВПО) путем имитации проверочной среды | 2020 |
|
RU2748518C1 |
| Способ для оценки чувства ритма человека | 2018 |
|
RU2685774C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ УСТРОЙСТВА ПОЛЬЗОВАТЕЛЯ С ПРИВЯЗКОЙ К ВИЗУАЛЬНЫМ ОСОБЕННОСТЯМ ОКРУЖЕНИЯ | 2022 |
|
RU2828682C2 |
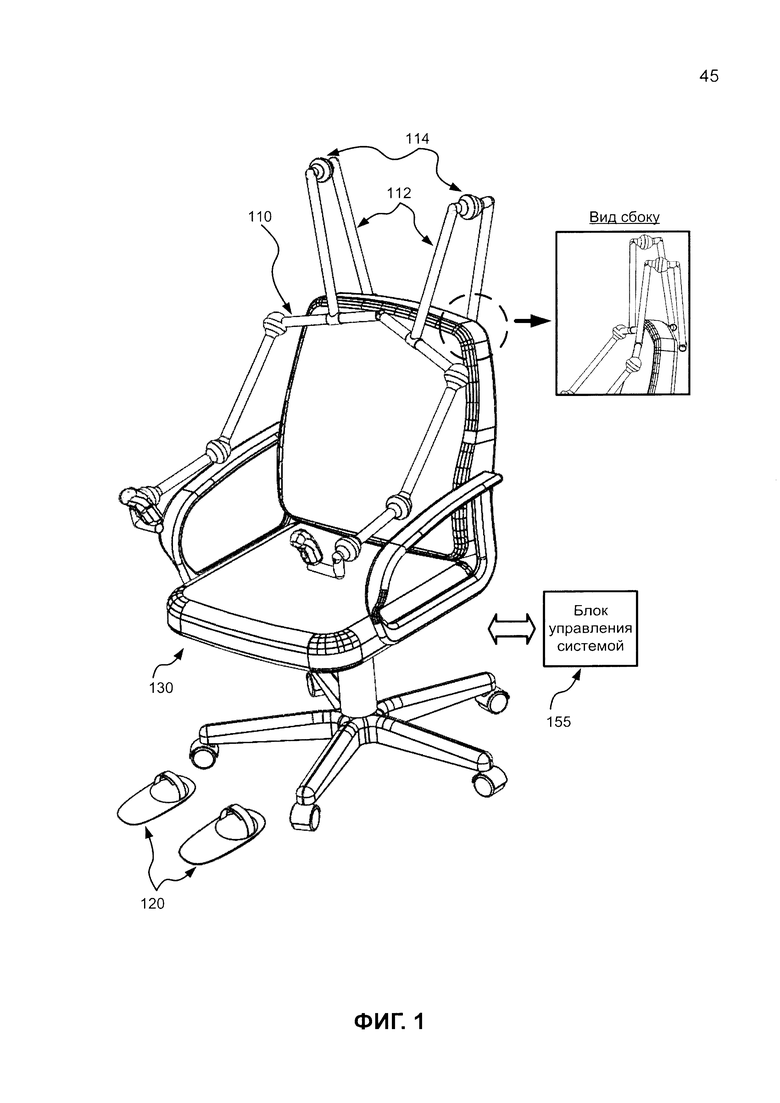
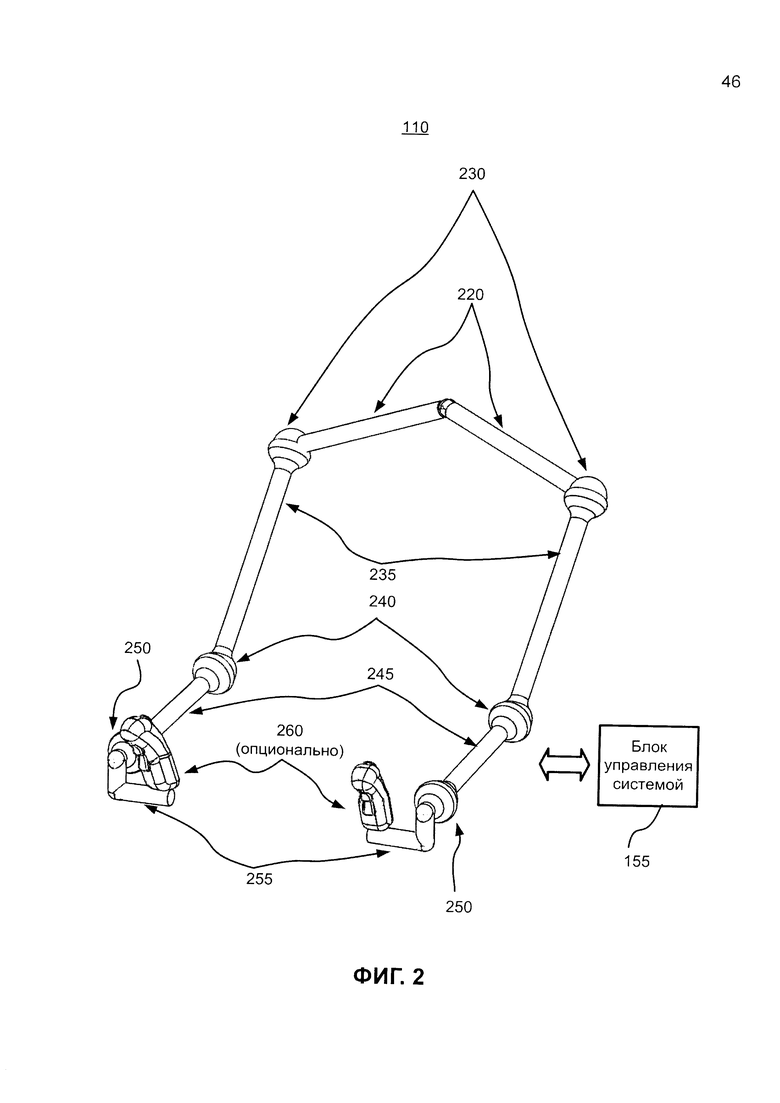
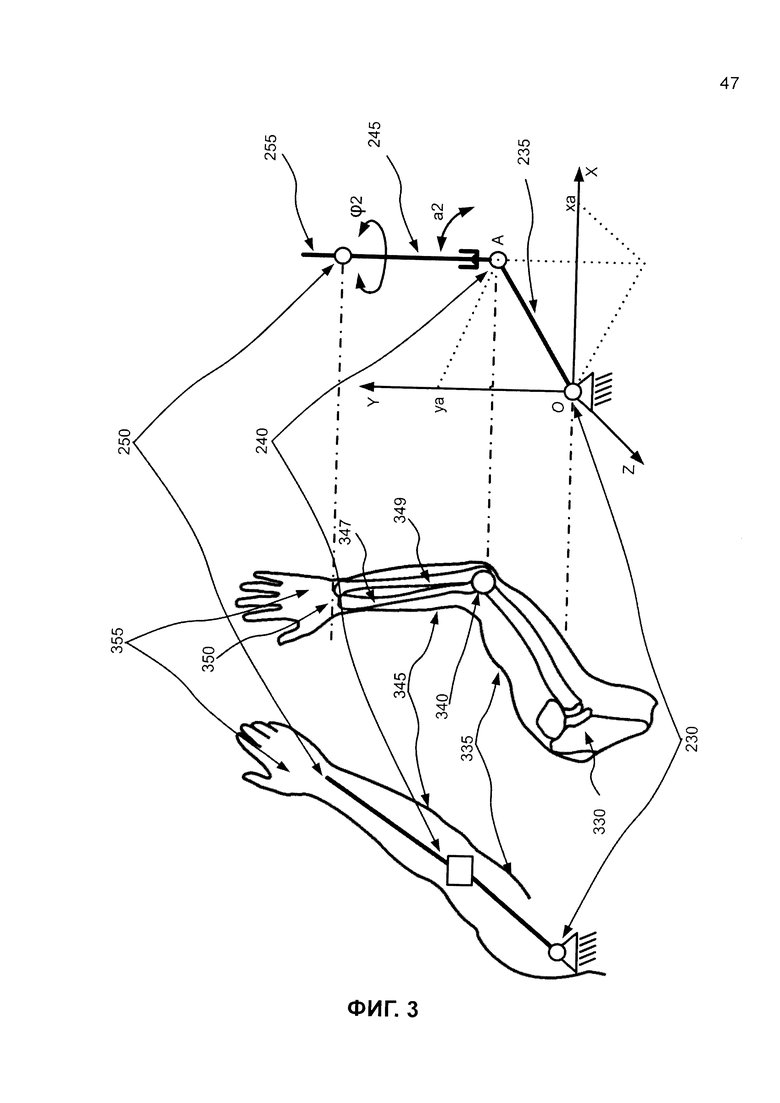
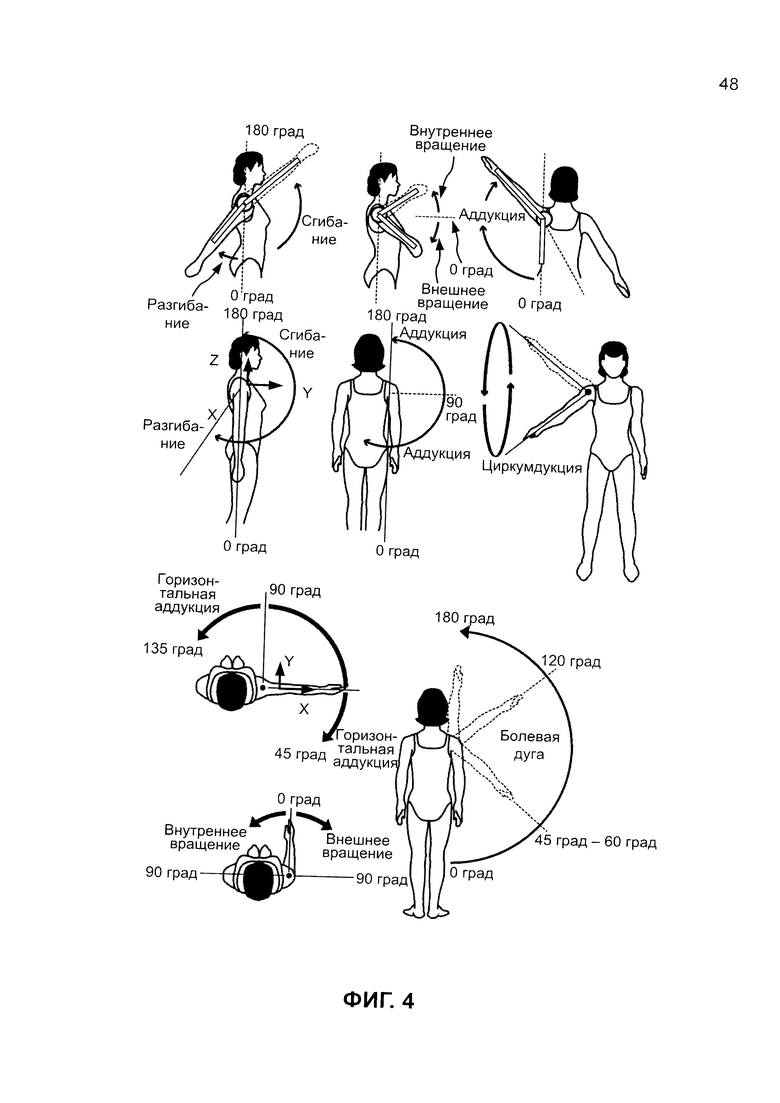
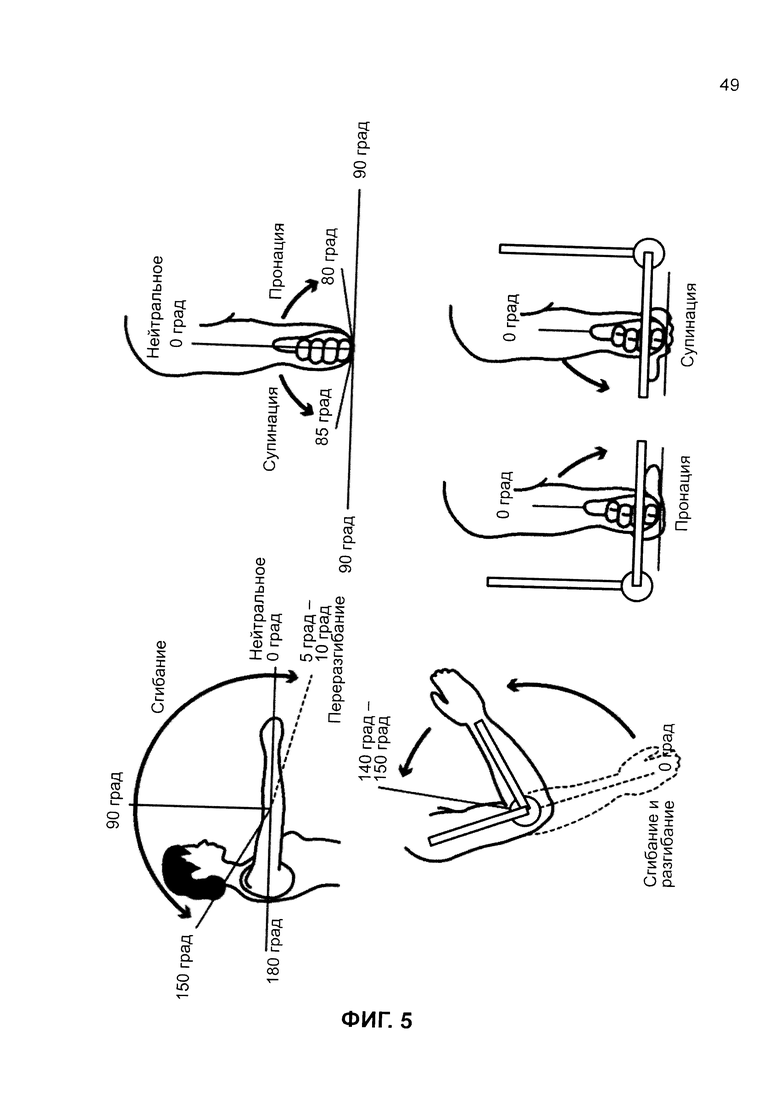
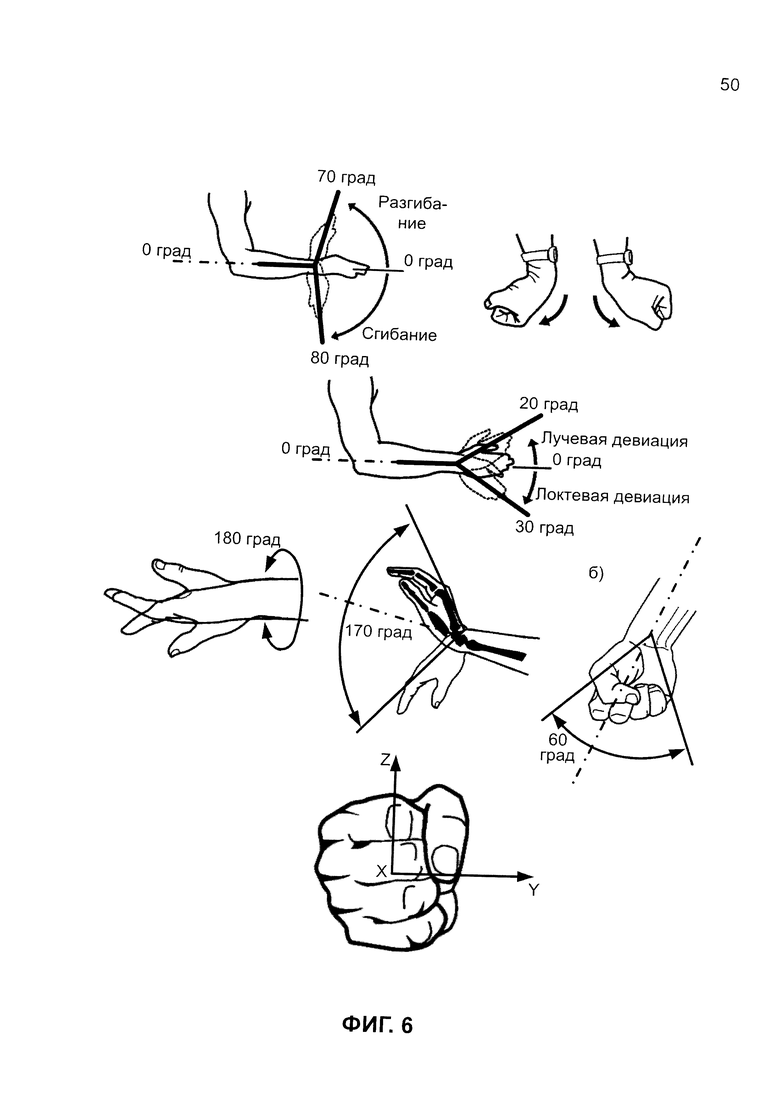
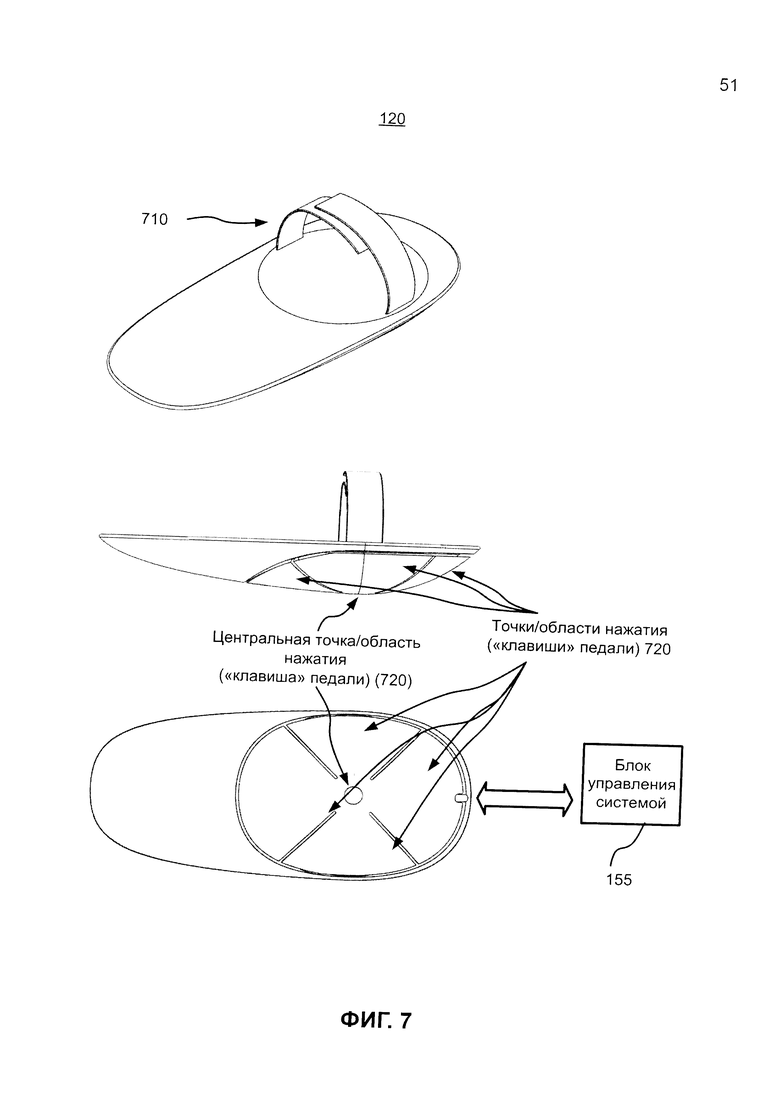
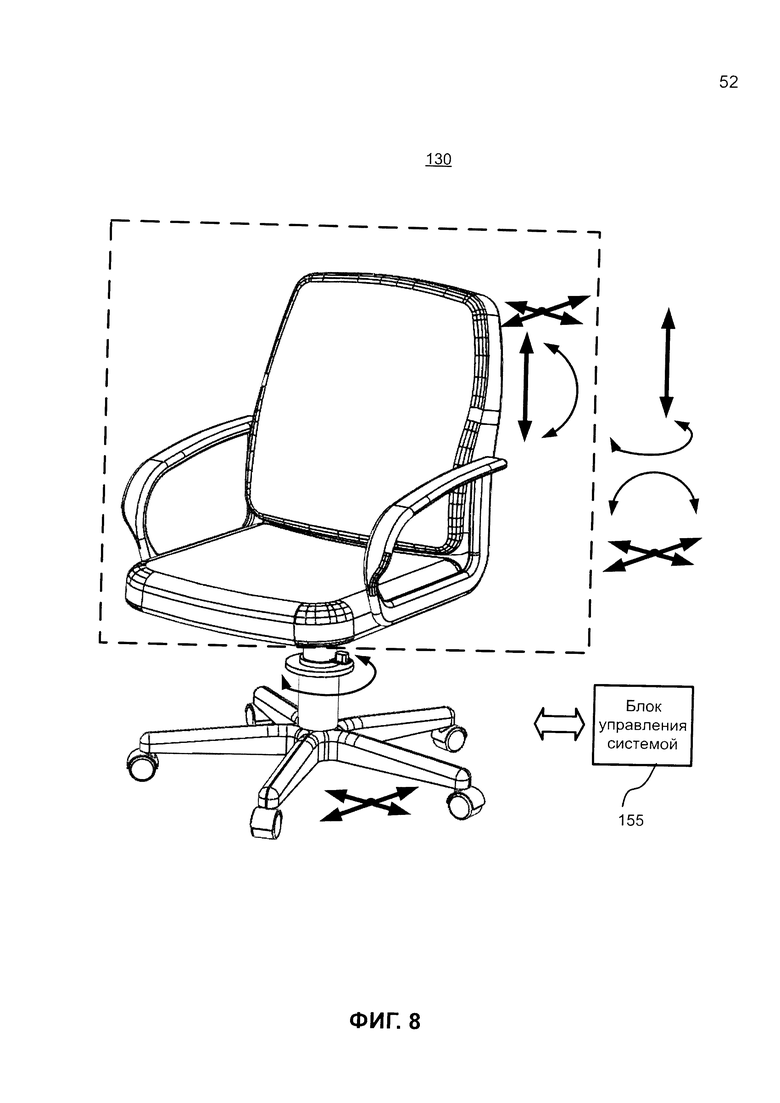
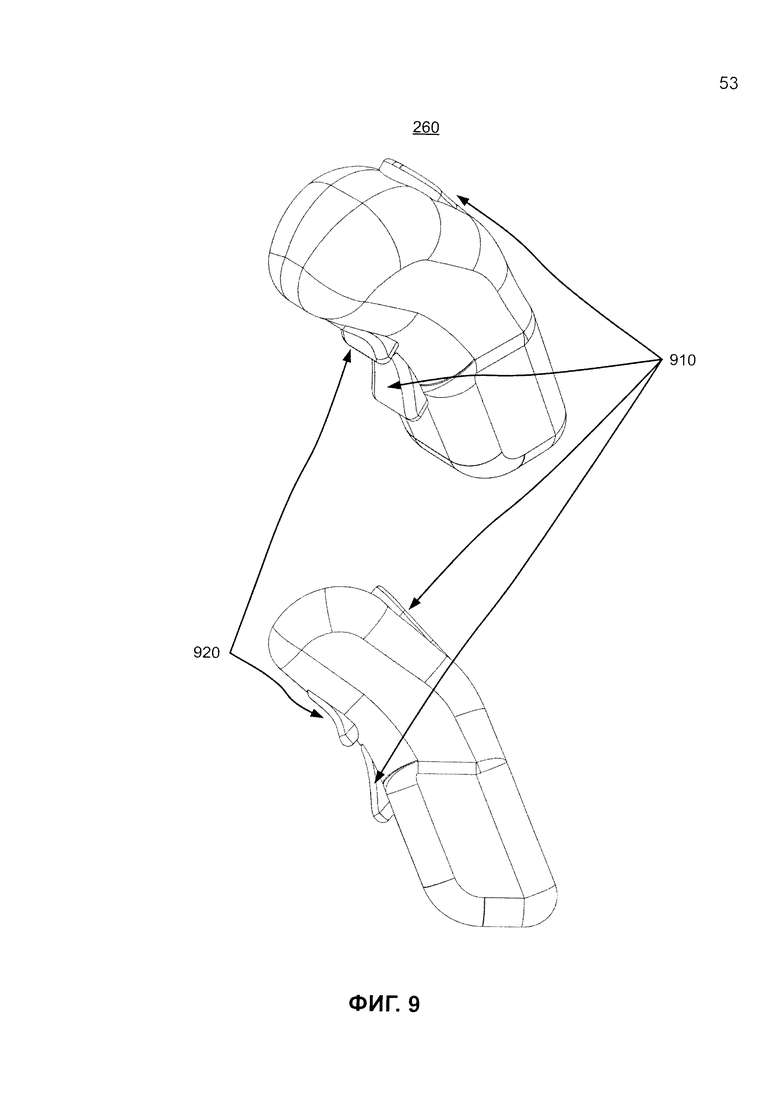
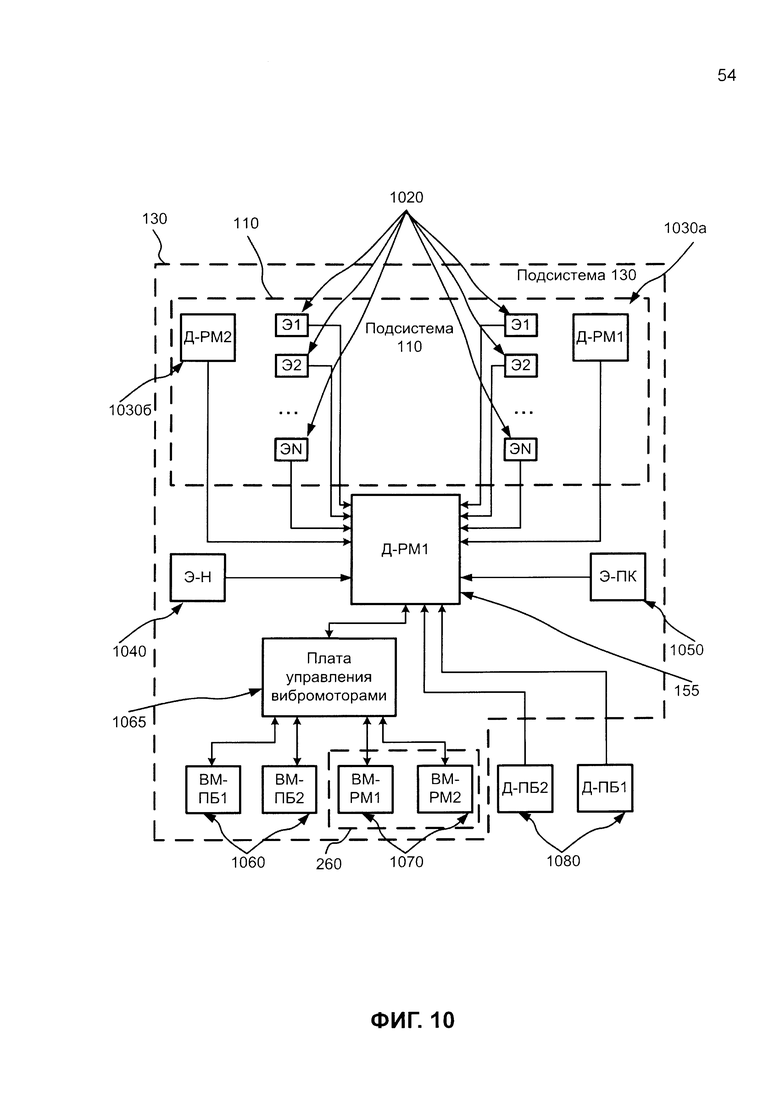
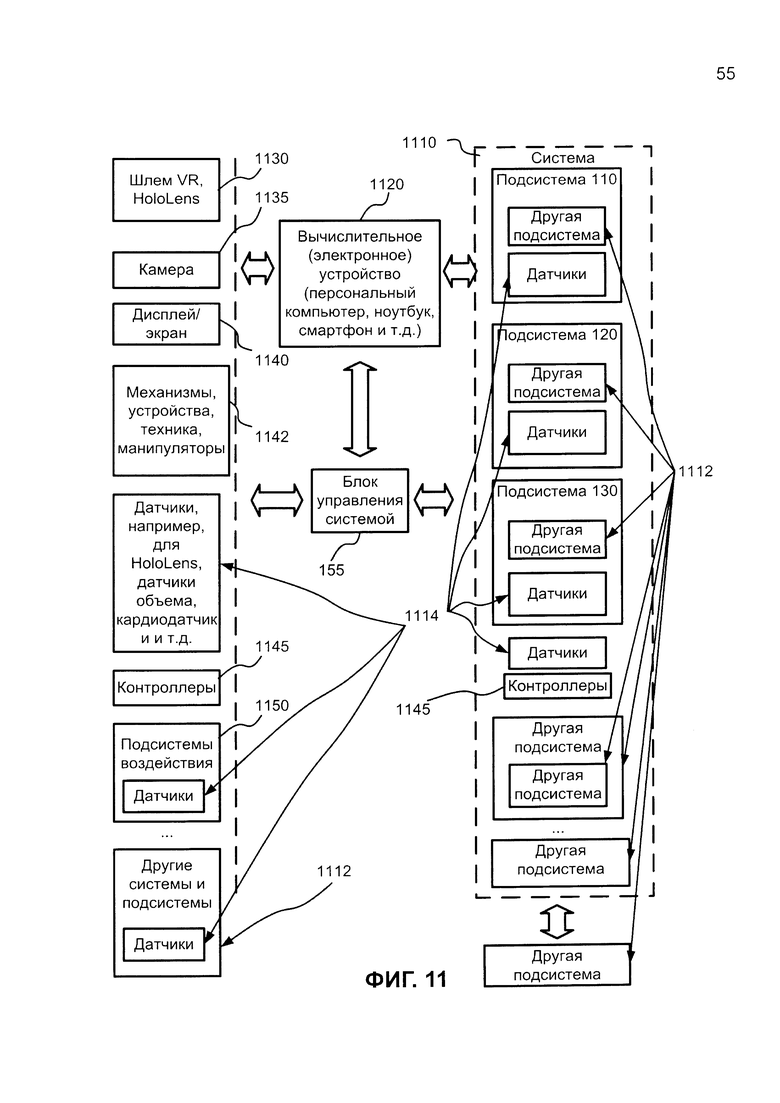
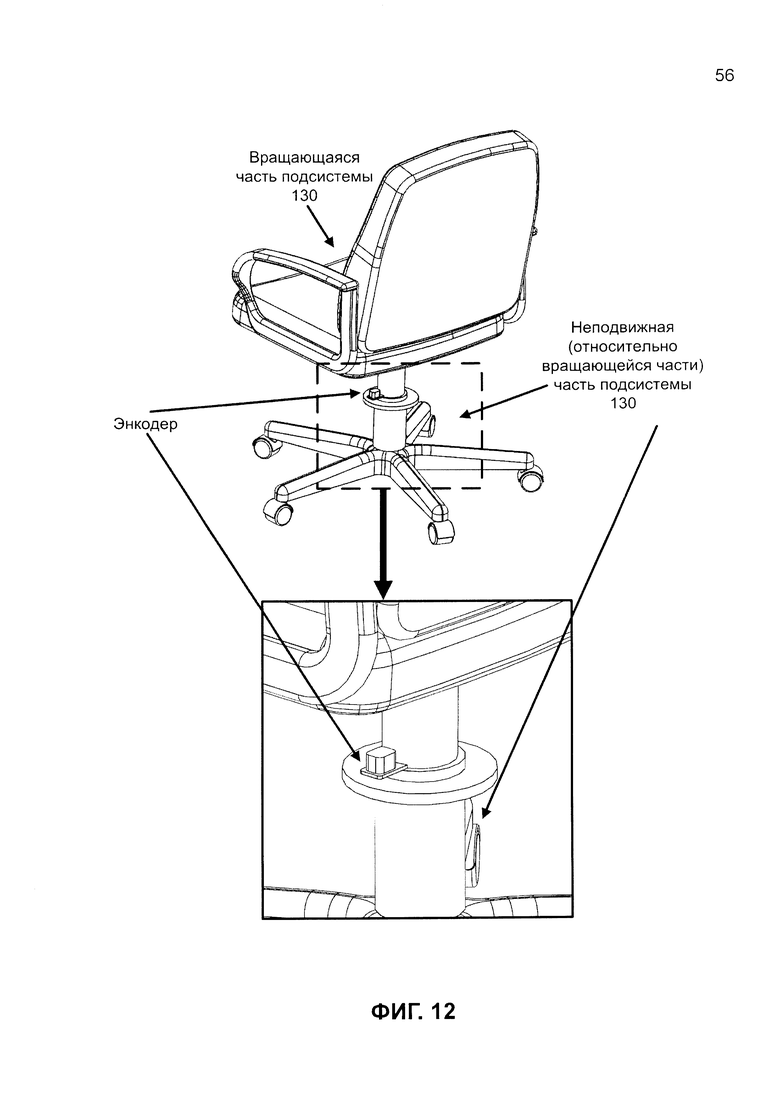
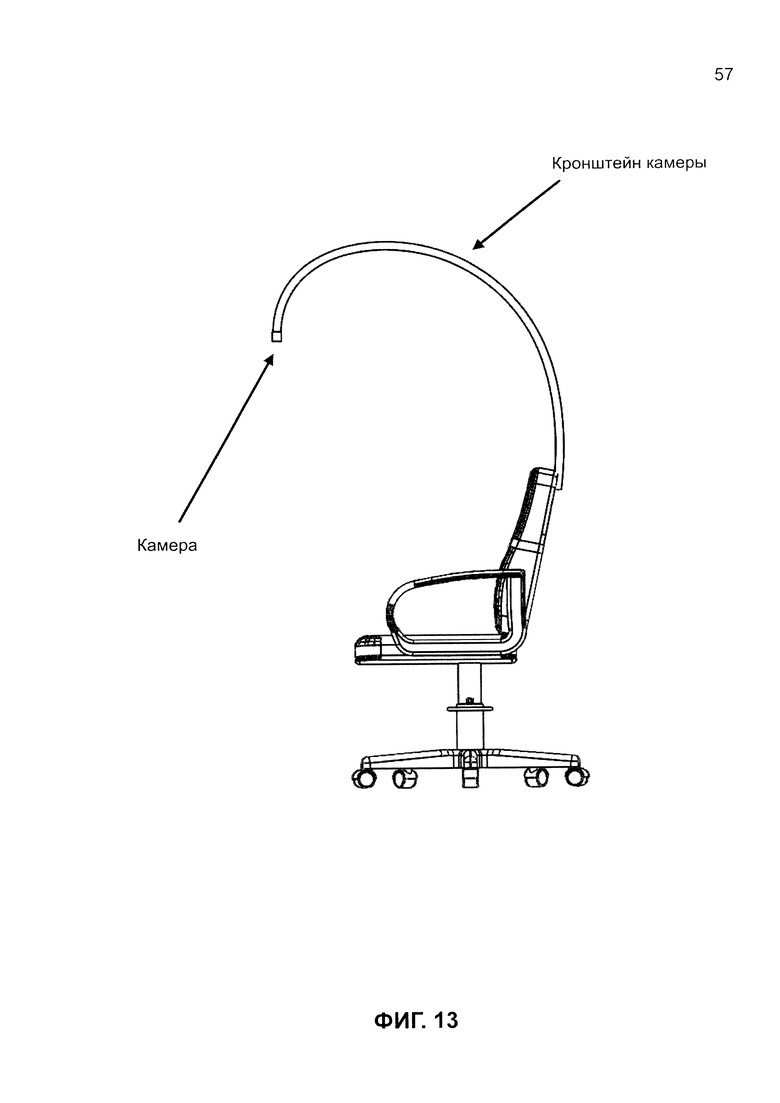
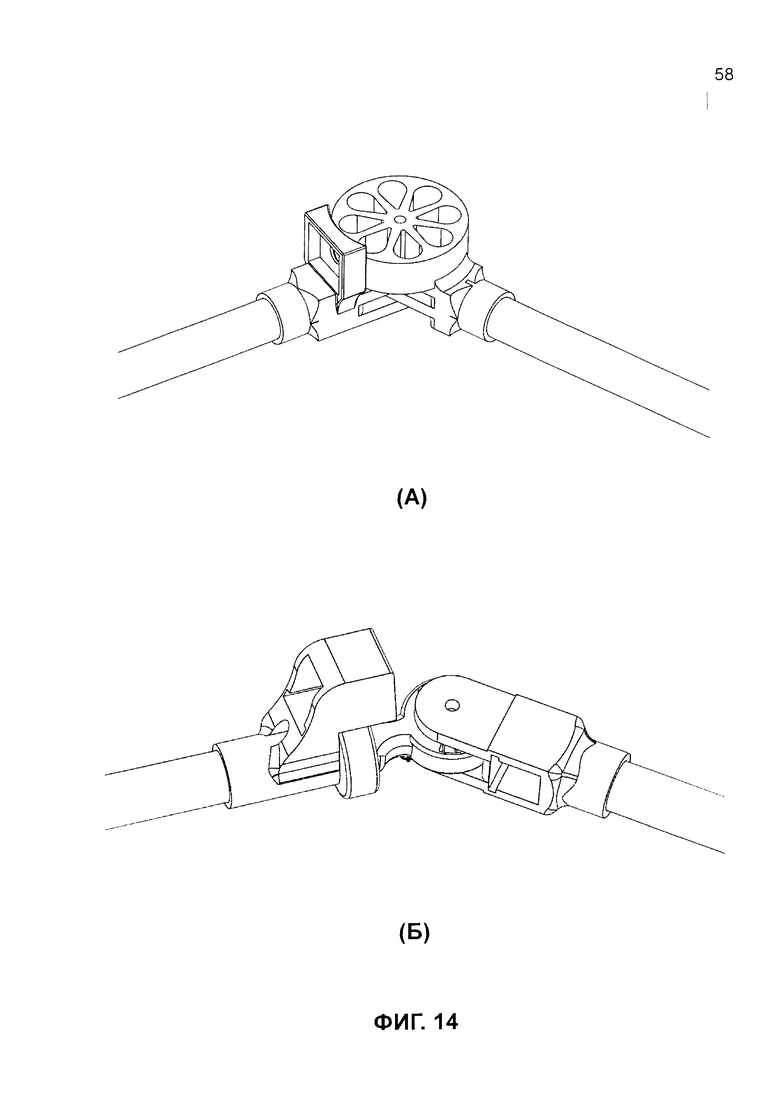
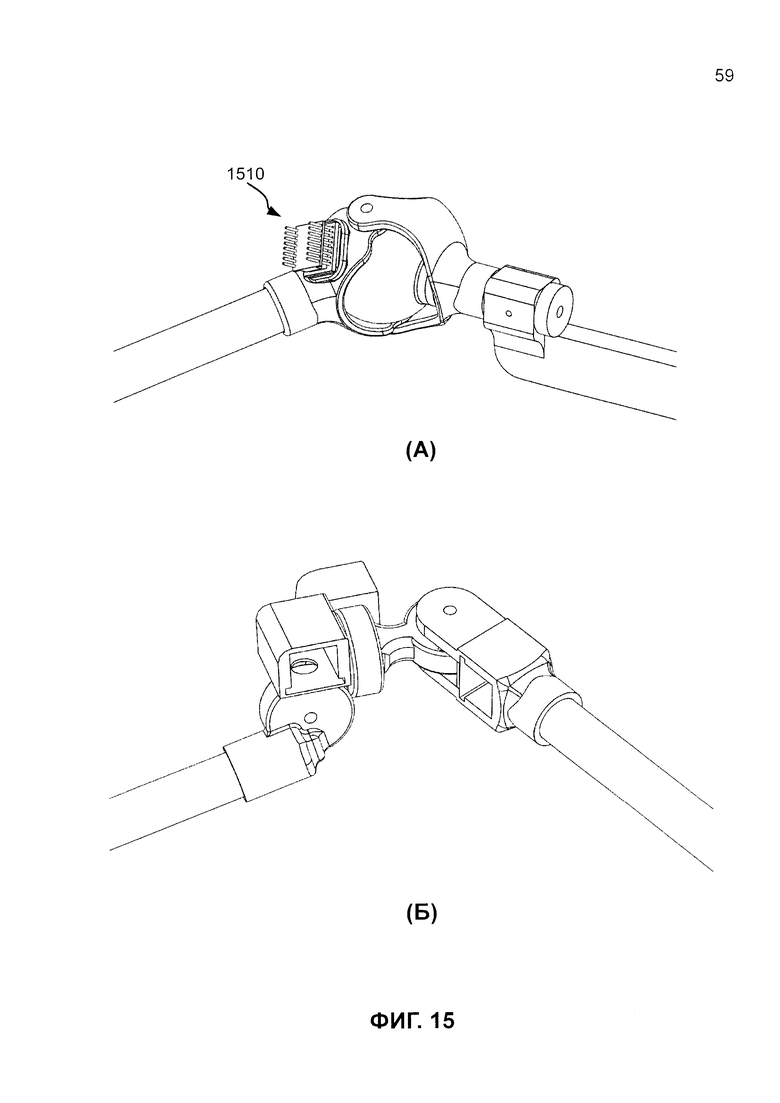
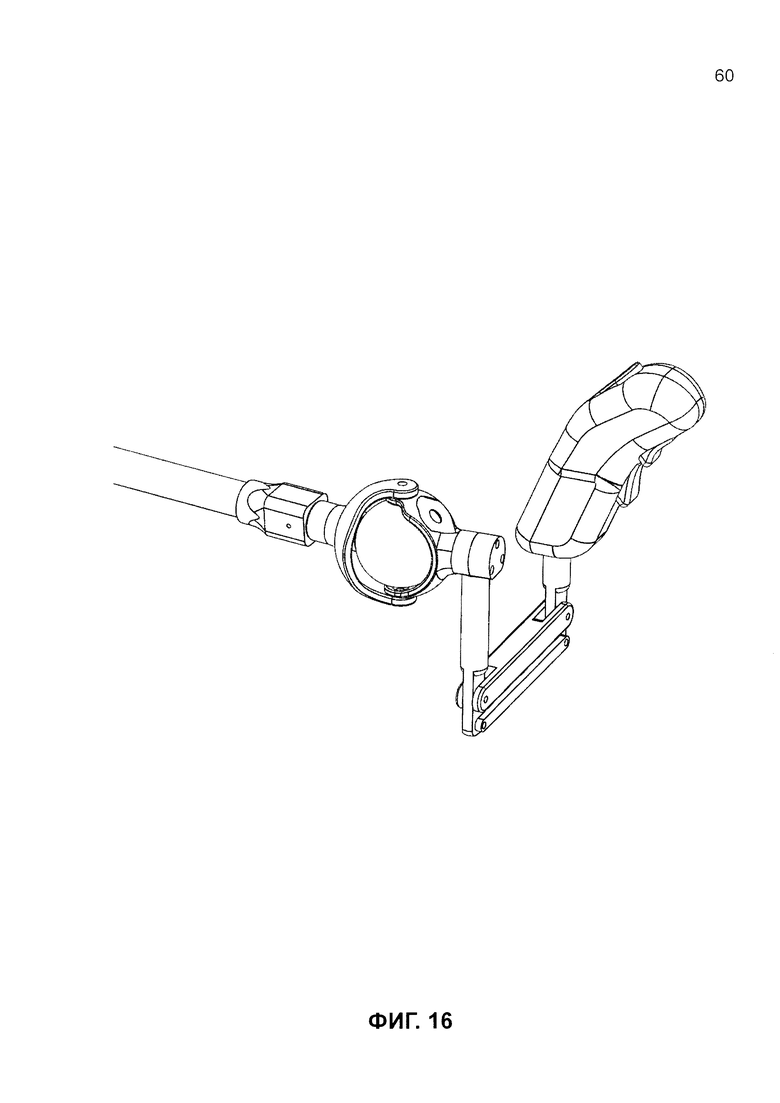
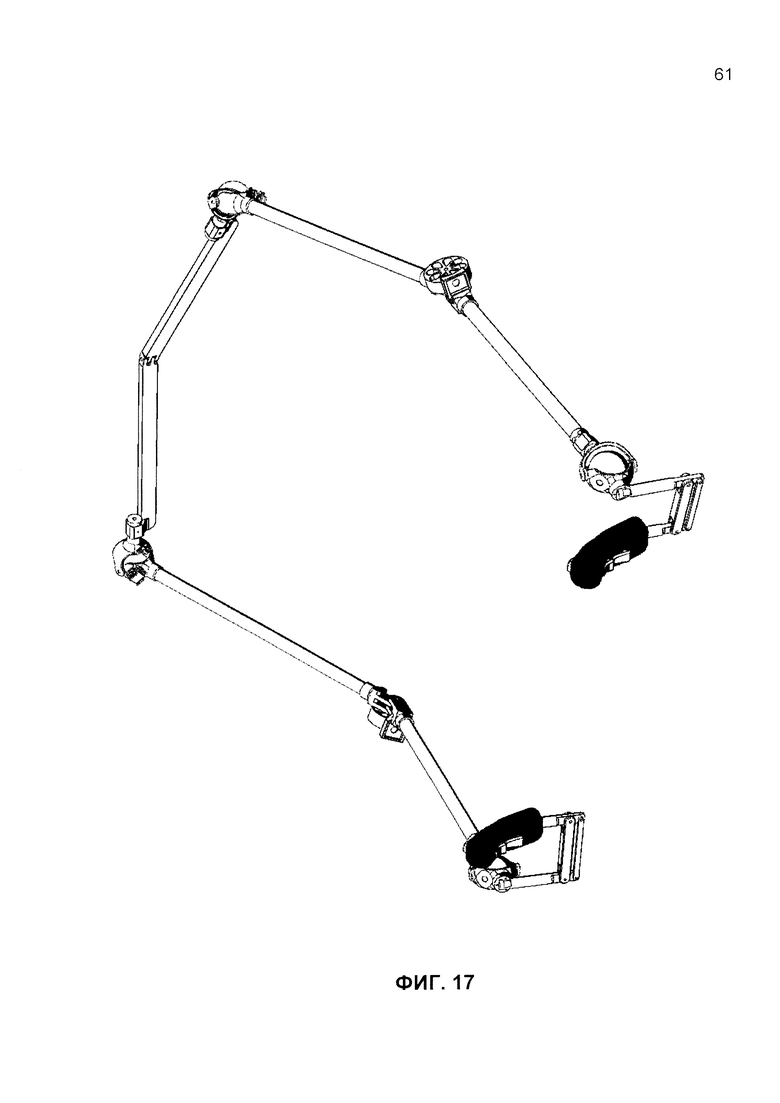
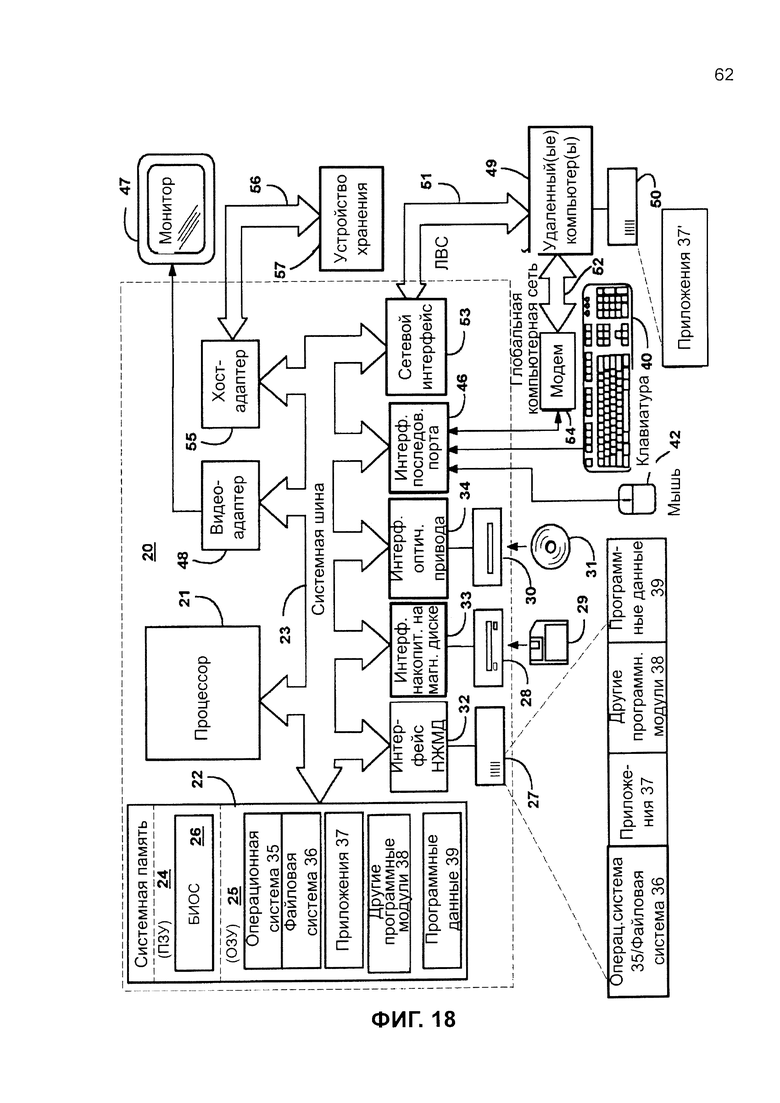
Изобретение относится к средствам захвата движений и положения тела человека и частей тела человека. Техническим результатом является повышение точности захвата движений и положений тела человека. Система включает: подсистему для регистрации положения и перемещения верхних конечностей пользователя в пространстве; подсистему для регистрации положения и перемещения нижних конечностей пользователя в пространстве; подсистему для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве, реализованную креслом; блок управления системы, к которому подключена по крайней мере одна упомянутая подсистема и который подключен к вычислительному устройству. 2 н. и 19 з.п. ф-лы, 18 ил.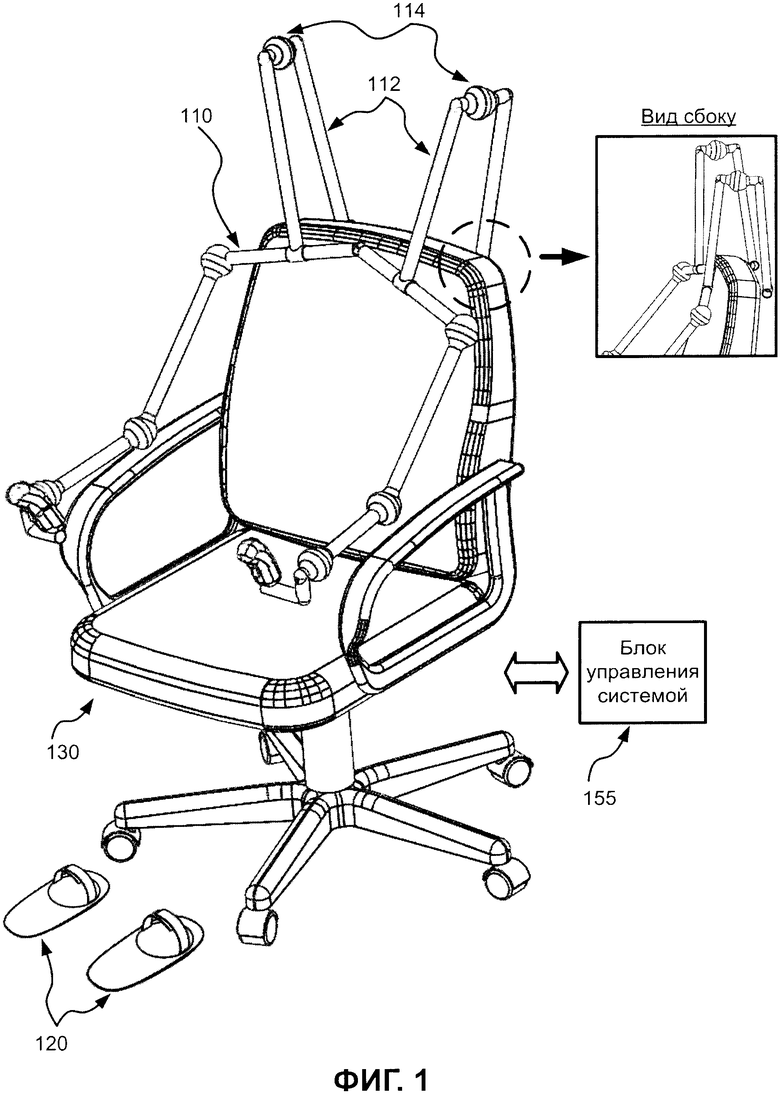
1. Система для захвата движений и положения тела человека и частей тела человека, связанная с вычислительным устройством и включающая:
- подсистему для регистрации положения и перемещения верхних конечностей пользователя в пространстве, на которой установлен по крайней мере один датчик, позволяющий регистрировать изменение угла отклонения составных элементов данной подсистемы относительно друг друга, причем составные элементы данной подсистемы состоят из плеча подсистемы, предплечья подсистемы, кисти подсистемы, моделирующими соответствующие части верхних конечностей пользователя;
- подсистему для регистрации положения и перемещения нижних конечностей пользователя в пространстве, обладающей по крайней мере четырьмя поверхностями нажатия, позволяющими регистрировать отклонения данной подсистемы от вертикальной оси, и по крайней мере одну поверхность нажатия для регистрации перемещения данной подсистемы по вертикальной оси;
- подсистему для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве реализованную креслом, оснащенную по крайней мере одним датчиком угла поворота, позволяющим регистрировать изменение угла вращения тела пользователя вокруг вертикальной оси;
- блок управления системы, к которому подключена по крайней мере одна упомянутая подсистема, и который подключен к вычислительному устройству, причем блок управления, получает данные по крайней мере с одной из упомянутых подсистем и/или по крайней мере с одного упомянутого датчика, и/или по крайней мере с одного устройства, подключаемого к системе для захвата движений и положения тела человека и частей тела человека, и передает на вычислительное устройство, и/или получает данные с вычислительного устройства и передает данные по крайней мере одной упомянутой подсистеме, и/или по крайней мере одному упомянутому датчику, и/или по крайней мере одному устройству, подключаемому к системе для захвата движений и положения тела человека и частей тела человека.
2. Система по п. 1, дополнительно включающая по крайней мере одно устройство ввода, связанное с блоком управления системы и/или вычислительным устройством.
3. Система по п. 1, дополнительно включающая устройство для полного или частичного погружения в виртуальную и/или дополненную реальность, управляемую вычислительным устройством.
4. Система по п. 1, характеризующаяся тем, что блок управления системы подключен к вычислительному устройству посредством беспроводного интерфейса и/или посредством проводного интерфейса.
5. Система по п. 1, характеризующаяся тем, что по крайней мере один упомянутый датчик реализован датчиком движения и/или датчиком объема, и/или оптическим датчиком, и/или механическим датчиком, и/или магнитным датчиком, и/или энкодером, и/или МЭМС-датчиком, и/или акселерометром, и/или гироскопом, и/или магнетометром.
6. Система по п. 1, характеризующаяся тем, что по крайней мере два упомянутых составных элемента подсистемы регистрации положения и перемещения верхних конечностей пользователя в пространстве соединены шарнирами, моделирующими плечевой, и/или локтевой, и/или лучезапястный суставы человека соответственно.
7. Система по п. 6, характеризующаяся тем, что по крайней мере один упомянутый шарнир реализован по крайней мере одним сферическим шарниром или по крайней мере одним цилиндрическим шарниром.
8. Система по п. 1, дополнительно включающая подсистему для регистрации положения и перемещения пальцев пользователя в пространстве.
9. Система по п. 1, характеризующаяся тем, что по крайней мере одна из упомянутых подсистем зафиксирована на теле пользователя и/или крепится по крайней мере к одной другой из упомянутых подсистем.
10. Система по п. 1, характеризующаяся тем, что подсистема для регистрации положения и перемещения нижних конечностей пользователя в пространстве использует по крайней мере один датчик отслеживания положения и перемещения по крайней мере одной нижней конечности пользователя.
11. Система по п. 1, характеризующаяся тем, что подсистема для регистрации положения и перемещения тела и частей тела пользователя в пространстве оборудована по крайней мере одним датчиком, позволяющим отслеживать отклонение по крайней мере одной части тела пользователя от вертикальной оси.
12. Система по п. 1, характеризующаяся тем, что по крайней мере одна упомянутая подсистема обеспечивает обратную связь с пользователем посредством по крайней мере одного установленного на ней датчика и/или посредством по крайней мере одной подсистемы воздействия на пользователя.
13. Система для захвата движений и положения тела человека и частей тела человека, связанная с вычислительным устройством и включающая:
- подсистему для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве, оснащенную по крайней мере одним датчиком, позволяющим регистрировать изменение положения и перемещения пользователя и/или по крайней мере одной части тела пользователя в пространстве;
- подсистему для регистрации положения и перемещения верхних конечностей пользователя в пространстве, на которой установлен по крайней мере один датчик, позволяющий регистрировать изменение угла отклонения составных элементов данной подсистемы относительно друг друга, причем элементы данной подсистемы состоят из плеча подсистемы, предплечья подсистемы, кисти подсистемы, моделирующими соответствующие части верхних конечностей пользователя;
- подсистему для регистрации положения и перемещения нижних конечностей пользователя в пространстве;
- блок управления системы, к которому подключена по крайней мере одна упомянутая подсистема и который подключен к вычислительному устройству, причем блок управления получает данные по крайней мере с одной из упомянутых подсистем и/или по крайней мере с одного упомянутого датчика, и/или по крайней мере с одного устройства, подключаемого к системе для захвата движений и положения тела человека и частей тела человека, и передает на вычислительное устройство, и/или получает данные с вычислительного устройства и передает данные по крайней мере одной упомянутой подсистеме, и/или по крайней мере одному упомянутому датчику, и/или по крайней мере одному устройству, подключаемому к системе для захвата движений и положения тела человека и частей тела человека;
причем по крайней мере одна из упомянутых подсистем закреплена на теле пользователя и/или крепится по крайней мере к одной другой из упомянутых подсистем, обеспечивает обратную связь с пользователем посредством по крайней мере одного установленного на ней датчика и/или посредством по крайней мере одной подсистемы воздействия на пользователя и реализована электромотором и/или вибромотором, и/или температурным устройством, и/или устройством, способным оказывать давление на тело и/или по крайней мере один участок тела пользователя и/или оказывать сопротивление по крайней мере одному действию пользователя.
14. Система по п. 13, характеризующаяся тем, что подсистема для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве реализована датчиками.
15. Система по п. 13, характеризующаяся тем, что подсистема для регистрации положения и перемещения тела и/или частей тела пользователя в пространстве реализована предметами, закрепленными на пользователе.
16. Система по п. 13, характеризующаяся тем, что по крайней мере одна из упомянутых подсистем зафиксирована на теле пользователя и/или крепится по крайней мере к одной другой из упомянутых подсистем.
17. Система по п. 13, дополнительно включающая по крайней мере одно устройство ввода, связанное с блоком управления системы и/или вычислительным устройством.
18. Система по п. 13, дополнительно включающая устройство для полного или частичного погружения в виртуальную и/или дополненную реальность, управляемое вычислительным устройством.
19. Система по п. 13, характеризующаяся тем, что блок управления системы подключен к вычислительному устройству посредством беспроводного интерфейса и/или посредством проводного интерфейса.
20. Система по п. 13, характеризующаяся тем, что по крайней мере один упомянутый датчик реализован датчиком движения и/или датчиком объема, и/или оптическим датчиком, и/или механическим датчиком, и/или магнитным датчиком, и/или энкодером, и/или МЭМС-датчиком, и/или акселерометром, и/или гироскопом, и/или магнетометром.
21. Система по п. 13, дополнительно включающая подсистему для регистрации положения и перемещения пальцев пользователя в пространстве.
| US 5963891 A, 05.10.1999 | |||
| СПОСОБ ОТСЛЕЖИВАНИЯ И ОТОБРАЖЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОЛЬЗОВАТЕЛЯ В ПРОСТРАНСТВЕ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2107328C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |

