Изобретение относится к области нетрадиционной энергетики и может быть использовано как источник электрической и механической энергии в гидро- и ветроустановках, в частности в конструкциях ветроприемных устройств с осью вращения ротора, перпендикулярной к направлению воздушного потока (ВП). Предлагаемый способ преобразования кинетической энергии ВП во вращательное движение плоской лопастью обеспечивает оптимальный угол разворота лопастей по отношению к направлению вектора ВП при движении по круговой траектории их осей и максимальную энергоэффективность для данного типа ветроэнергетических установок (ВЭУ).
В качестве аналога рассмотрим известный карусельный ветродвигатель по патенту RU 2380567 С2, МПК F03D 3/00 от 27.01.2010 г., в котором ветродвигатель содержит установленное на вертикальном валу рабочее колесо, выполненное в виде размещенных между верхним и нижним ободами поворотных лопастей, закрепленных на кронштейнах, связанных с валом, сочлененным с электрогенератором, и механизм управления лопастью, причем каждая лопасть снабжена механизмом управления лопастью в виде флюгера и поворотного устройства, установленных на вертикальном валу соосно с лопастью, а поворотное устройство состоит из дифференциала, один вал которого жестко связан с осью флюгера, второй вал жестко связан с ободом рабочего колеса, причем корпус дифференциала жестко связан с осью поворотной лопасти.
1. Недостатками известного устройства являются довольно сложный механизм реализации и большая его металлоемкость, причем передача механической энергии от детали 12 на деталь 13 трением при эксплуатации будет не надежна.
2. В описании патента указаны положения лопастей относительно вектора воздушного потока. В 1-м квадранте - 45 градусов - положение правильно, во 2-м - 90 градусов - правильно, в 3-м квадранте - 135 градусов, что верно только для первой половины этого квадранта, а во второй половине 3-го квадранта при таком положении лопасти возникнет тормозной момент, а это значит, что лопасть работает неверно, в зоне - 270 градусов лопасть занимает положение - 180 градусов относительно вектора воздушного потока (флюгеруется), а в 4-м квадранте движется под некоторым острым углом к вектору воздушного потока. Как видим, управление лопастью производится по достаточно сложному закону, причем с ошибкой в 3-м квадранте и неопределенным значением острого угла в 4-м. Достижение таких результатов только с помощью дифференциального редуктора проблематично, а ноу-хау автором не раскрывается. Использовать ветродвигатель по данному патенту без дополнительной информации невозможно.
Известна конструкция ветродвигателя с ветроколесом «Ветросиловая установка карусельного типа с циклично плавно крутящимися, в противофазе ротору, симметричными лопастями» по патенту RU 2392490 С1, МПК F03D 3/00, от 20.06.2010 г., принятая в качестве аналога. Ветросиловая установка карусельного типа с циклично плавно крутящимися, в противофазе ротору, симметричными лопастями, содержащая лопасти, установленные на осях, расположенных параллельно оси вращения ротора, и снабженные приводами вращения лопасти вокруг своей оси, обеспечивающими их плавный разворот на пол-оборота в противоположном направлении относительно направления вращения ротора при его полном обороте вокруг своей оси, приводы могут быть либо механическими, работающими через механическую связь с ориентированной по направлению ветра шестерней, или также ориентированными по направлению ветра и сблокированными по количеству цепей звездочками на центральной оси ротора, либо электроприводами вращения лопастей вокруг своих осей, при этом электронные команды с датчиков ветра флюгера и анемометра, расположенных на ветросиловой установке, подаются либо на исполнительный электропривод подстройки под направление ветра центральной шестерни, находящейся на оси ротора, или сблокированных звездочек механического привода, находящихся на оси ротора, либо на электроприводы вращения лопастей вокруг своих осей.
Данная конструкция обеспечивает удовлетворительное значение коэффициента использования энергии ветра, позволяет устанавливать лопасти любой конструкции. Однако данное техническое решение не способно устранить целый ряд негативных особенностей, присущих в разной степени большинству известных конструкций ВЭУ. К их числу следует отнести:
1) сложный в эксплуатации и ненадежный вариант с механическими приводами, звездочками и комплектом цепей;
2) предложена интуитивная методика получения энергии ветрового потока (без реальных математических выкладок), далекая от строгой методики получения максимально возможной (экстремальной) энергии каждой лопасти от воздушного потока при ее движении по круговой траектории (0-2π) - математически в любой точке этой траектории, кроме одной лишь точки прохождения, с максимальной скоростью навстречу ветру, когда парусность лопасти по отношению к ветру практически равна нулю, все лопасти действуют с однознаковыми моментами силы на ротор. А в точке максимального раскрытия парусности лопасти под вектор силы ветра, находясь в попутном движении ветру, и создаваемый момент силы является в этой точке к тому же максимальным, потому что в этой точке у движущей силы лопасти и самое длинное плечо;
3) не ясно, каким образом электронные команды с датчиков ветра флюгера и анемометра, расположенных на ветросиловой установке, стыкуются с центральной шестерней, находящейся на оси ротора, или сблокированных звездочек механического привода, находящихся на оси ротора, либо на электроприводы вращения лопастей вокруг своих осей (разрез А-А, с обзором сбоку), по вертикали оси ВСУ, сблокированных звездочек, с флюгером, датчиком ветра, механизмом коррекции лопастей под направление ветра;
4) совсем не используется энергия воздушного потока при движении лопастей навстречу воздушному потоку - на установку устанавливается кожух-обтекатель, прикрывающий от ветра часть ротора, где идет инверсное, навстречу ветру, движение лопастей, выполненный с возможностью отбрасывать потоки воздуха на выходящие из-под кожуха-обтекателя лопасти и ориентированный по направлению ветра посредством центральной шестерни или сблокированных звездочек на оси ротора;
5) предлагаются явно нереальные для реализации, фантастические решения, где на фиг. 6 патента показан вид сбоку заякоренного к земле дирижабля с подвешенными к нему спаренными ВСУ данного изобретения;
6) в режиме лопасти-плоскости оптимальная скорость ее движения равна 1/3 скорости воздушного потока, т.е. ветроустановка должна быть низкооборотной, а в режиме крыла (сомнительной конфигурации) подъемная его сила зависит от скорости результирующего воздушного потока и угла атаки. При малых оборотах и неоптимальном угле атаки эффективность такого крыла будет очень низка;
7) необходимость разворота всего ротора вместе с механизмом вращения лопастей при ориентации на изменение направления ветра.
Известна конструкция ветродвигателя с ветроколесом «Ветроэнергетическая установка» по патенту RU 2543905 С2, МПК F03D 3/00 от 10.03.2015 г., принятая в качестве прототипа. Ветроэнергетическая установка содержит ветроприемное устройство, выполненное в виде ветроколеса, установленного с возможностью вращения вокруг вертикальной оси и снабженного лопастями, расположенными на ободе ветроколеса и установленными на валах, находящихся на оси симметрии лопастей, причем вал каждой лопасти соединен соосно с валом собственного привода, осуществляющего разворот лопасти, причем ветроколесо ветроприемного устройства выполнено в виде косого сечения цилиндра с максимальной высотой продольного диаметрального сечения не менее удвоенной высоты лопастей. Отметим недостатки в конструкции, работе и оформлении патента, принятого за прототип.
1. В конструкции имеется видимо два ветроколеса поз. 1 и поз. 2, расположенных под углом к основному валу, пронумерованному так же, как и лопасти поз. 2, а также привод поз. 5 и микроконтроллер, обозначенный также поз. 5, но подробности крепления к валу отсутствуют.
2. В предложенной конструкции с ободами под углом площадь каждой лопасти в 2 раза меньше, а эффект затенения не ликвидирован. Предлагаемая более сложная конструкция требует увеличения количества лопастей и приводов к ним, т.е. неоправданного усложнения и повышения стоимости.
3. В описании и в формуле изобретения не указана форма лопастей. Если применены плоские лопасти, то намечены нереальные рабочие скорости воздушного потока и скорости оборотов ветроэнергетической установки (при угловых скоростях до двух-трех оборотов в секунду и площади лопасти до 5 м2). При плоских лопастях используется принцип лобового сопротивления «Grag Principle», основанный на возможности получать энергию из ВП только путем перемещения тела в ВП. Воздушный поток, согласно направлению, определяется проекцией градиента давления для всей площади элементов относительно силы торможения профиля по отношению к ВП [Розин М.Н Теория парусных установок. http:/rosinmn.ru/vetro/teorija_parusa/teorija_parusa.htm].
Если пластина неподвижна и перпендикулярна скорости ветра, то на нее действует сила

где
F - сила давления воздушного потока [н],
Сх - коэффициент сопротивления, зависящий от формы тела,
p - плотность воздуха 1,29 [кг/м3],
S - площадь поперечного сечения пластины [м2],
Vв - скорость потока воздуха [м/с].
Коэффициент Сх зависит от формы тела. Тонкая большая пластина перпендикулярна потоку Сх=1,33.
Когда пластина движется, то она как бы убегает от ветра и относительная скорость воздушного потока, набегающего на пластину, снижается. Поэтому сила напора воздушного потока также будет меньше

где Vп - скорость пластины.
Если пластина неподвижна, то полезная мощность равна нулю. Если пластина движется со скоростью ветра, то она не испытывает давления, и мощность тоже равна нулю. Для достижения максимального коэффициента использования энергии ветра (КИЭВ) скорость пластины должна быть в три раза меньше скорости ветра. Для плоской пластины КИЭВ равен 0,164-0,197. Например, при диаметре D=4 м, т.е. расстоянии между двумя противоположными осями поз.3 лопастей поз.2 за 1 оборот ось каждой лопасти проходит путь π D=12,5 м, причем за 0,5 сек по описанию, т.е. предполагается, что при оптимизации оборотов установки (1/3 Vв) Vв=75 м/сек.
4. Из описания патента непонятна следующая формулировка: « За счет того, что лопасти, двигающиеся против ветра и по ветру, занимают «положение ребром» к ветру, они не создают аэродинамического торможения и позволяют лопастям иметь модуль вектора скорости больше скорости ветра». Крылья в «положение ребром» активно работают, причем моменты для положений А и Е по Фиг. 3 прототипа направлены навстречу. Если же это плоские лопасти, то они не могут без дополнительного внешнего воздействия опережать скорость ветра.
5. На фиг. 3 прототипа дано 8 положений лопасти (предположительно плоской), которые относительно вектора воздушного потока должны обеспечивать максимальный съем энергии на генератор. Однако в положениях и Н, и А, и Е лопасти дают нулевой момент, что касается остальных 5 положений лопасти, то хотя направление момента верно, но насколько оптимально выбран угол между вектором воздушного потока и лопастью (экспериментально или аналитически) не ясно и, как будет показано в техническом предложении, далеко от строгого оптимума.
Технический результат предлагаемого способа заключается в максимальной эффективности преобразования кинетической энергии воздушного ВП в электрическую. Достигается он тем, что в предлагаемом способе ось каждой лопасти соединяют с валом собственного привода, осуществляющего разворот каждой плоской лопасти по круговой орбите, положение ее плоскости выставляют с помощью электропривода с датчиком положения вала ведущей лопасти на угол разворота β относительно направления воздушного потока в каждой точке круговой траектории ее вала по команде с ее блока управления, осуществляющего непрерывный аналитический расчет этого угла β=α/2+45° по информации об угле α поворота вертикальной оси относительно вектора воздушного потока, получаемой от датчиков направления воздушного потока и углового положения вертикальной оси ветроэнергетической установки относительно вектора воздушного потока, а для остальных лопастей в соответствующие блоки управления вводятся постоянные поправки для угла α 180, 120 или 90 градусов в зависимости от количества лопастей.
Повышение мощности ВЭУ осуществляется также за счет поддержания скорости движения лопастей по круговой около 1/3 скорости основного вектора ВП за счет регулирования нагрузки генератора, связанного с осью ВЭУ через редуктор или вариатор. Повышению мощности ВЭУ способствует также то, что ВП, поступающий на ВЭУ, ограничивают верхним и нижним дисками, которые жестко закрепляют на вертикальной оси ВЭУ и увеличивают плотность ВП на каждой лопасти, так как соскальзывание ВП с верхней и нижней частей лопастей отсутствует.
Целью предлагаемого изобретения является также повышение мощности, снимаемой с единицы "ометаемой" площади, и эффективности в зоне малых скоростей ВП (1.5-4 м/сек), низкооборотность 10-30 об/мин, что способствует удешевлению и повышению надежности подшипниковых узлов оси ВЭУ, а также снижению паразитных шумов и вибраций, что положительно влияет на экологию. Кроме того, размещение лопастей и их осей между дисками уплотняет ВП, направленный на лопасти (соскальзывание ВП с верхней и нижней частей лопасти отсутствует), повышает жесткость конструкции и надежность.
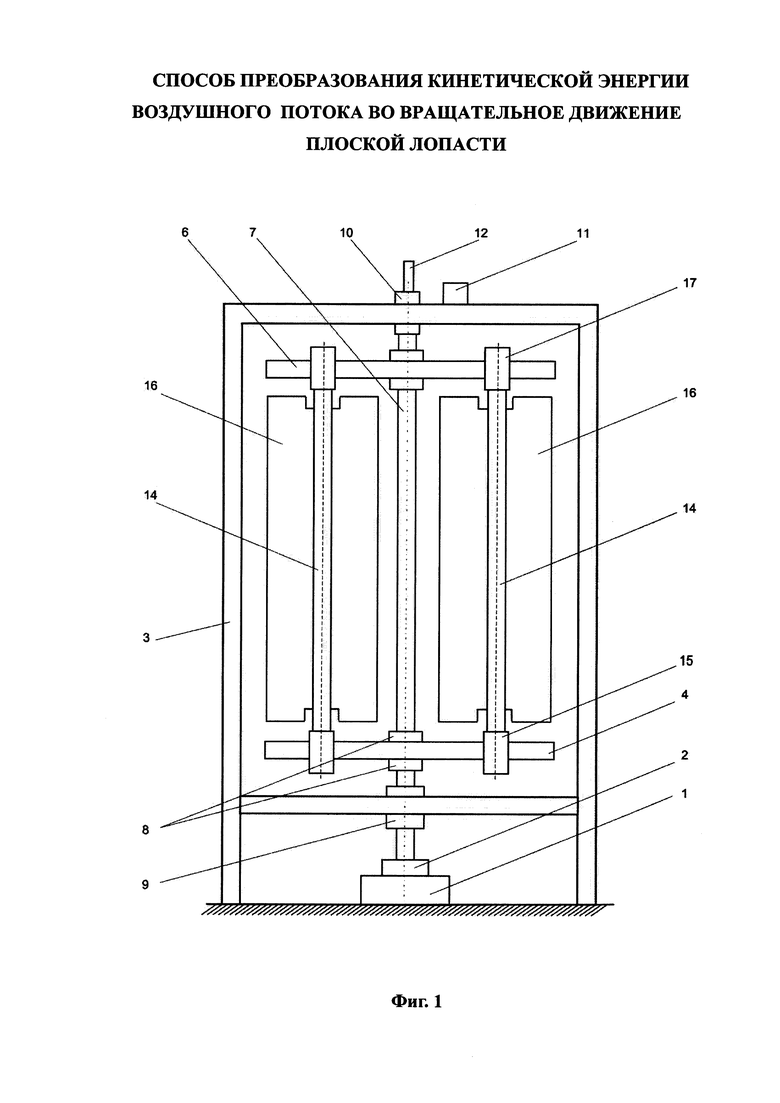
На Фиг. 1 показан вариант конструкции ВЭУ, реализующий предлагаемый способ.
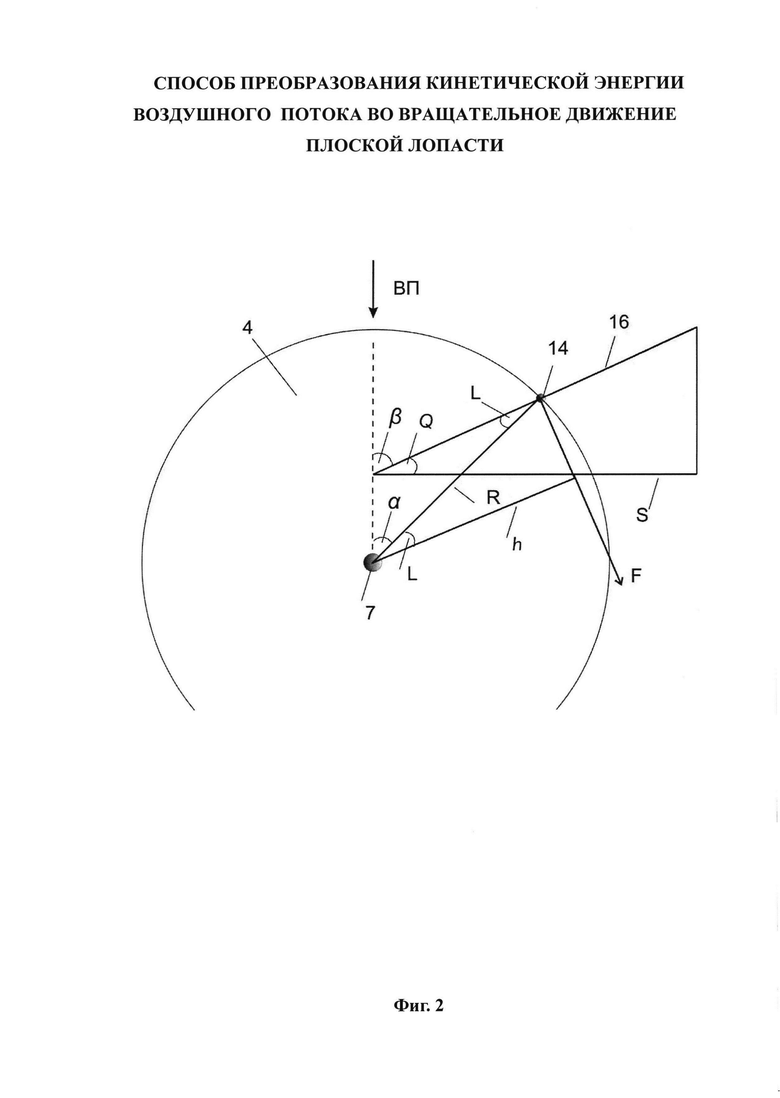
На Фиг. 2 проиллюстрирована методика получения максимального момента для ВЭУ с плоскими лопастями.
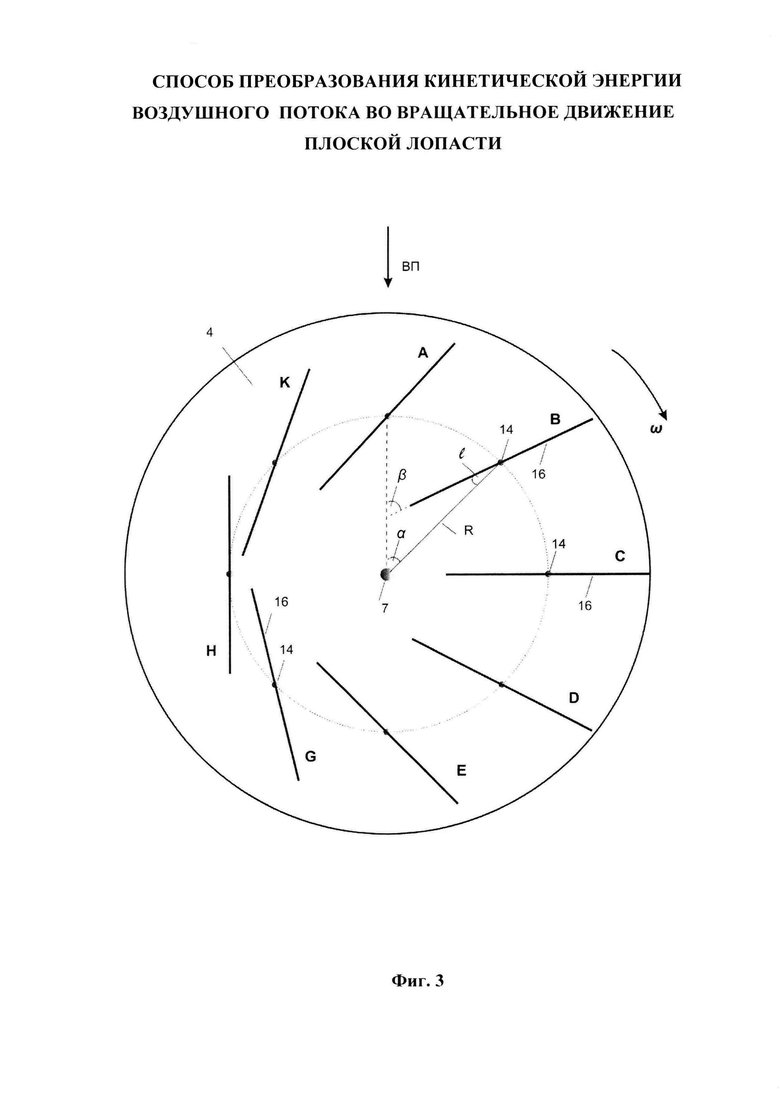
На Фиг. 3 даны восемь положений лопасти при одном обороте ВЭУ.
Ветроэнергетическая установка состоит из ряда деталей и узлов:
- блок электромеханического преобразователя 1, генератор которого через редуктор или вариатор связан с вертикальной осью 7, на входы блока подключены датчики оборотов оси 2 и скорости ВП 11, а к его выходам подключены промышленная сеть или группа аккумуляторов большой емкости (с инверторами, работающими на промышленную сеть), рама 3,обеспечивает жесткое вертикальное положение всей конструкции ВЭУ, именно на ней размещен датчик скорости ВП 11, например анемометр;
- ось ВЭУ 7, на которой жестко закреплены опорные диски 4 и 6 с помощью гаек 8, причем ось 7 снизу связана с рамой 3 с помощью нижней опоры 9;
- датчик углового положения 10 оси 7 и флюгер 12 прикреплены сверху к оси 7, причем статор датчика 10 жестко связан с осью 7, а его ротор жестко связан с осью флюгера 12;
- плоские лопасти 16 закреплены на валах 14;
- корпусы электроприводов 15 со встроенными блоками управления и датчиками положения валов 14 закреплены на нижнем диске 4, а валы электроприводов 15 жестко соединены с валами 14 плоских лопастей 16;
- каждый вал 14 соединяется с опорами 17, размещенными на верхнем диске 6.
Блок 1 электромеханического преобразователя поддерживает скорость вращения ВЭУ около 1/3 скорости ВП за счет регулирования нагрузки генератора вплоть до его номинальной нагрузки. При этом блок 1 формирует на выходе генератора такую нагрузку, которая обеспечивает линейную скорость ωR при движении валов 14 лопастей 16 по круговой орбите, равной 1/3 скорости ВП. R - расстояние между осью 7 и валами 14, а ω - угловая скорость валов 14 (см. Фиг. 2). Скорость движения лопастей по круговой орбите, т.е. скорость вращения валов лопастей вокруг оси 7 по рабочей окружности (РО), определяется ее датчиком оборотов 2, а скорость основного ВП определяется датчиком скорости ВП 11. В связи с движением валов 14 лопастей 16 по РО на каждую лопасть 16 действует дополнительный вектор ВП, направленный по касательной к РО и результирующий воздушный поток то больше, то меньше основного вектора ВП. В связи с низкими оборотами рассматриваемой ВЭУ, наличием нескольких лопастей пренебрегаем влиянием дополнительного ВП и выбираем скорость движения валов 14 лопастей 16 по РО, равной 1/3 текущей скорости основного ВП.
ВП, поступающий на ВЭУ, ограничен верхним 6 и нижним 4 дисками, которые жестко закреплены на оси 7 и увеличивают плотность ВП на лопасти 16, при этом соскальзывание ВП с верхней и нижней частей лопасти 16 отсутствует. Управление положением лопастей 16 осуществляется электроприводом 15 с учетом датчика положения и команд управления из блока управления электроприводом 15 на основании информации об угле α поворота вертикальной оси 7 относительно вектора воздушного потока ВП, определяемого флюгером 12, получаемой от датчиков направления воздушного потока и углового положения вертикальной оси ветроэнергетической установки относительно вектора воздушного потока.
При нескольких лопастях ВЭУ в соответствующие блоки управления электроприводами 15 вводятся постоянные поправки для угла α 180, 120 или 90 градусов в зависимости от количества лопастей. При субэкстремальном регулировании (см. Фиг. 2 и Фиг. 3) относительно вектора ВП с помощью датчика 10 флюгера 12 и электропривода 15 плоскость лопастей 16 выставляют на определенный угол β относительно вектора ВП в каждой точке движения по РО. Субэкстремальное регулирование - это оптимизация без учета дополнительного ВП, возникающего при вращении лопастей по круговой орбите.
При этом обеспечивается максимально возможный момент вращения для каждого значения угла α поворота оси 7. При субэкстремальном регулировании давление ВП на лопасти 16 не должно значительно превышать некоторого расчетного номинального значения, которое определяется в блоке 1 как номинальная нагрузка генератора. С целью оптимизации оборотов в ВЭУ вводят блок электромеханического преобразователя 1, который формирует на выходе генератора такую нагрузку, которая обеспечивает линейную скорость валов плоских лопастей ветроэнергетической установки при ее движении по круговой орбите, равной 1/3 скорости воздушного потока.
В предлагаемом изобретении используются одновременно два принципа оптимизации преобразования кинетической энергии ВП:
1. Оптимизация положения плоской лопасти 16 относительно вектора ВП в процессе движения ее вала 14 по РО и получение максимального момента вплоть до номинальной нагрузки генератора в каждой точке этой траектории. Получены аналитические выражения без учета дополнительного вектора ВП, возникающего при вращении лопастей по РО.
2. Оптимизация скорости движения плоскости по круговой траектории предлагаемой конструкции ВЭУ, использующей принцип лобового сопротивления «Grag Principle». Например, при скорости В, равной 6 м/сек, при соответствующей нагрузке на генераторе получаем скорость вала каждой лопасти ВЭУ 2 м/сек по РО, т.е. 1/3 скорости ВП.
На фиг. 2 проиллюстрирована методика получения максимального момента М=Fh, где F - сила, создаваемая ВП на лопасти 16, h - плечо этой силы относительно оси 7 для ВЭУ с плоскими лопастями. Найдена зависимость между углом поворота α оси 7 относительно вектора ВП и углом плоскости β лопасти 16 относительно вектора ВП. Проекция S лопасти 16 на плоскость, перпендикулярную вектору ВП (см. Фиг. 2), находится под углом Q и равна:

где S0 = площадь лопасти.
При оптимизации скорости вращения ВЭУ, т.е. скорости движения осей лопастей по РО, VП=1/3VB, а сила давления F на лопасть с учетом (2):

Определим момент, который развивает сила по (4) (см. Фиг. 2) относительно оси ВЭУ 7. Плечо h зависит от расстояния R между осью 7 и валом 14 лопасти 16 и равно:

С учетом (4) и (5) момент МЛ вращения ВЭУ, создаваемый каждой лопастью 16 в каждой точке РО лопасти

Необходимо для каждого значения угла α при движении лопасти по круговой траектории найти максимальное значение момента, которое очевидно зависит от угла β, определяющего положение плоскости лопасти относительно вектора ВП. Берем производную от момента МЛ по β
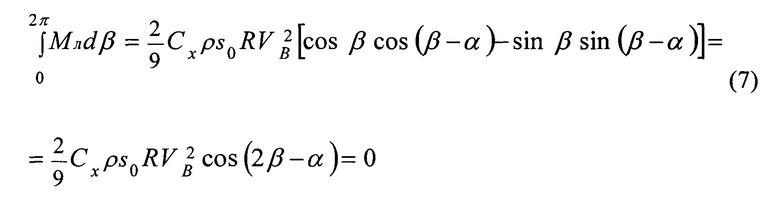
Поэтому Cos(2β-α)=0,2β-α=90°, и получаем основное аналитическое выражение для разработанной ВЭУ
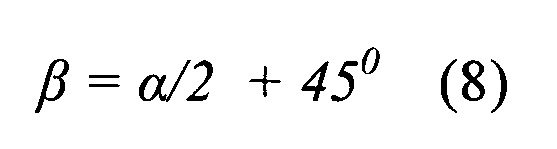
Выполнение соотношения между углами β и α по (8) в ВЭУ обеспечивает максимальное значение момента в любой точке РО каждой лопасти 16.
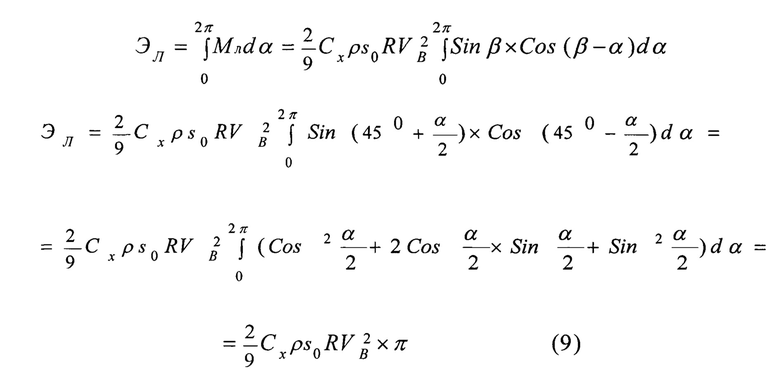
На Фиг. 3 даны восемь положений (А, В, С, D, G, Е, Н, K) лопасти 16 при одном обороте ВЭУ с учетом полученного оптимального соотношения между углами α и β относительно вектора ВП и получении из воздушного потока максимальной энергии ЭЛ за один оборот одной лопасти.
В таблице представлены значения углов α и β для восьми положений лопасти 16 при β=α/2+45°:

В начальный момент времени ВЭУ неподвижна, однако блоки управления и датчики положения вала 14 каждого электропривода 15 с соответствующей программой реализуют аналитическое выражение (8) зависимости между углом α поворота вертикальной оси 7 относительно вектора воздушного потока и углом β поворота вала 14 каждой лопасти 16 относительно вектора ВП в каждой точке РО. В этом режиме каждый блок управления электроприводов 15 получает информацию с флюгера 12 и с датчика положения 10, вычисляя угловое положение лопастей 16 относительно положения флюгера 12. При изменении направления ВП на блоки управления электроприводов 15 будут переданы скорректированные команды углов α и вычисленные для угла β, т.е. новое положение лопастей 16 относительно вектора ВП. Данная методика описана для одной лопасти, названной ведущей. Для остальных лопастей 16 в блоки управления электроприводов 15 вводятся постоянные поправки для угла α 180, 120 или 90 градусов в зависимости от количества лопастей. При штормовых скоростях ветра, создающих опасные для ВЭУ режимы работы, по сигналу от датчика 11 скорости ВП блоки управления электроприводов 15 переводят все лопасти в режим флюгерования. В таком положении набегающий воздушный поток не создает крутящий момент на лопастях 16 и ВЭУ находится в пассивном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ВЕТРОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК С ГОРИЗОНТАЛЬНО-ОСЕВЫМИ ПРОПЕЛЛЕРНЫМИ ТУРБИНАМИ | 2014 |
|
RU2588914C2 |
| ЭКОЛОГИЧНАЯ И ЭНЕРГОЭФФЕКТИВНАЯ ВЕТРОТУРБИНА НА ГОРИЗОНТАЛЬНОМ ВАЛУ | 2016 |
|
RU2692602C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2016 |
|
RU2702814C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2014 |
|
RU2589569C2 |
| Ветродвигатель с N лопастных винтов | 2023 |
|
RU2826884C1 |
| ЦИЛИНДРИЧЕСКАЯ ВЕТРОТУРБИНА | 2014 |
|
RU2563558C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2022 |
|
RU2801883C1 |
| Карусельное ветроколесо | 2016 |
|
RU2659680C2 |
| СПОСОБ ЭЛЕКТРОСНАБЖЕНИЯ АВТОНОМНЫХ ПОТРЕБИТЕЛЕЙ ВЕТРОЭНЕРГЕТИЧЕСКИМИ УСТРОЙСТВАМИ | 2019 |
|
RU2742889C1 |
| Оптимизированный ветродвигатель | 2023 |
|
RU2833818C1 |
Изобретение относится к области нетрадиционной энергетики. Способ преобразования кинетической энергии воздушного потока во вращательное движение лопасти заключается в том, что ветроэнергетическая установка содержит ветроприемное устройство, выполненное в виде ветроколеса, установленного с возможностью вращения вокруг вертикальной оси и снабженного лопастями, установленными на валах, находящихся на оси симметрии лопастей, причем вал каждой лопасти соединен соосно с валом собственного электропривода, в состав которого входит блок управления, осуществляющего разворот соответствующей лопасти, причем при вращательном движении каждой плоской лопасти по круговой орбите положение ее плоскости выставляют с помощью электропривода с датчиком положения вала ведущей лопасти на угол разворота β относительно направления воздушного потока в каждой точке круговой траектории ее вала по команде с ее блока управления, осуществляющего непрерывный аналитический расчет этого угла β=α/2+45° по информации об угле α поворота вертикальной оси относительно вектора воздушного потока, получаемой от датчиков направления воздушного потока и углового положения вертикальной оси ветроэнергетической установки относительно вектора воздушного потока, а для остальных лопастей в соответствующие блоки управления вводятся постоянные поправки угла α 180, 120 или 90 градусов в зависимости от количества лопастей. Изобретение направлено на повышение мощности ветроэнергетической установки. 1 з.п. ф-лы, 3 ил., 1 табл.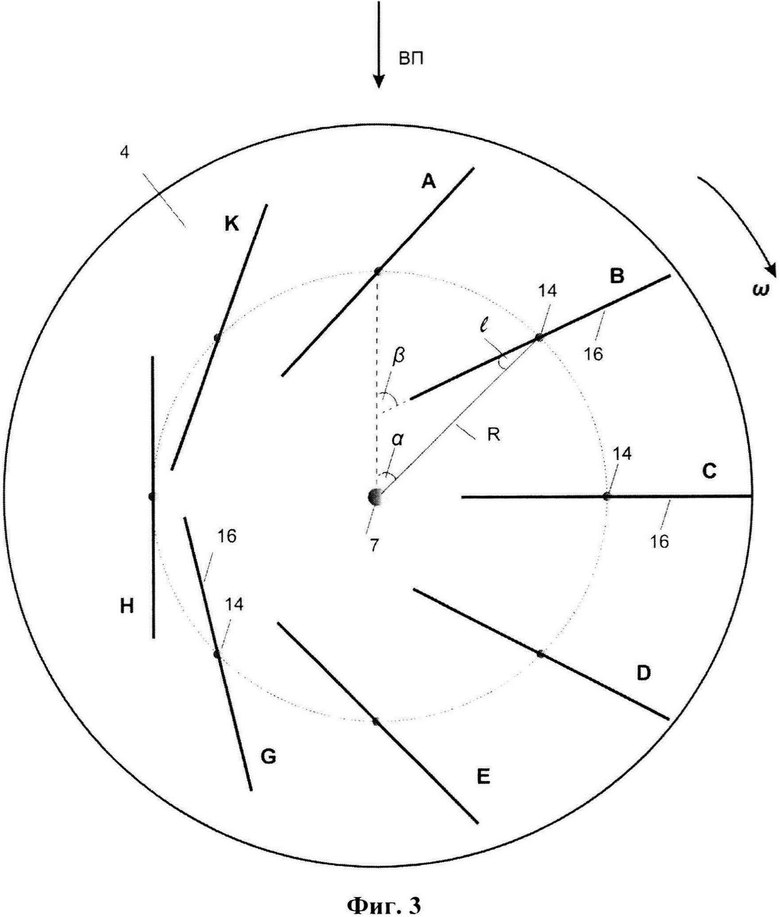
1. Способ преобразования кинетической энергии воздушного потока во вращательное движение лопасти, заключающийся в том, что ветроэнергетическая установка, содержащая ветроприемное устройство, выполненное в виде ветроколеса, установленного с возможностью вращения вокруг вертикальной оси и снабженного лопастями, установленными на валах, находящихся на оси симметрии лопастей, причем вал каждой лопасти соединен соосно с валом собственного электропривода, в состав которого входит блок управления, осуществляющего разворот соответствующей лопасти, отличающийся тем, что при вращательном движении каждой плоской лопасти по круговой орбите положение ее плоскости выставляют с помощью электропривода с датчиком положения вала ведущей лопасти на угол разворота β относительно направления воздушного потока в каждой точке круговой траектории ее вала по команде с ее блока управления, осуществляющего непрерывный аналитический расчет этого угла β=α/2+45° по информации об угле α поворота вертикальной оси относительно вектора воздушного потока, получаемой от датчиков направления воздушного потока и углового положения вертикальной оси ветроэнергетической установки относительно вектора воздушного потока, а для остальных лопастей в соответствующие блоки управления вводятся постоянные поправки для угла α 180, 120 или 90 градусов в зависимости от количества лопастей.
2. Способ по п. 1, отличающийся тем, что в ветроэнергетическую установку вводят блок электромеханического преобразователя, который формирует на выходе генератора такую нагрузку, которая обеспечивает линейную скорость валов плоских лопастей ветроэнергетической установки при ее движении по круговой орбите, равной 1/3 скорости воздушного потока.
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2543905C2 |
| АЭРОГИДРОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2044157C1 |
| EA 200700242 A1, 29.06.2007 | |||
| JP 2006152922 A, 15.06.2006 | |||
| DE 19603982 A1, 07.08.1997 | |||
| US 2011305569 A1, 15.12.2011. | |||

